
Контрольная Исследование систем управления (задание 1, контрольная №2, НГУЭУ)
| Группа предметов | Экономические |
| Предмет | Теория управления |
| Тема/вариант работы | Контрольная Исследование систем управления (задание 1, контрольная №2, НГУЭУ) |
| Кол-во источников: | 10 |
| Кол-во страниц: | 9 |
| Тип работы: | Контрольная, 2019 г. |
| Цена работы | 450 руб |
ВВЕДЕНИЕ
Практическая часть. Построение функциональной дескриптивной многоуровневой модели системы управления действующей организации и графического ее отображения в виде многоуровневой «системой карты»
ЗАКЛЮЧЕНИЕ
СПИСОК ЛИТЕРАТУРЫ
Эффективное управление является одной из важнейших задач при построении и развитии любого предприятия, это залог выживания в трудной конкурентной борьбе. Инвестиции, инновации, рынки сбыта и все остальные важные аспекты развития бизнеса могут быть абсолютно бесполезными без правильно работающей системы управления организацией.
Изучение системы управления начинается с формирования ее дескриптивной модели, которое проводится по стадиям.
Дескриптивная модель – это модель описательного характера. То есть это модель, которая предназначена для описания и объяснения наблюдаемых фактов или прогноза поведения объектов.
Целью работы является построение функциональной дескриптивной многоуровневой модели системы управления действующей организации.
Для достижения цели необходимо решить следующие задачи:
1. Сформировать дескриптивную модель организации с декомпозицией по структурным элементам.
Сформировать дескриптивную модель организации с декомпозицией по структурным элементам.
2. Построить функциональную модель системы управления первого уровня.
3. Выбрать функциональную подсистему и сформировать ее многоуровневую системную карту.
4. Построить SADT-модель, поясняющей формы связей операционных функций одной из функциональных подсистем (главной функции).
Объектом исследования является система управления организацией. Предметом исследования является многоуровневая функциональная модель системы управления.
Также с данной работой покупают
Новую работу можно заказать здесь
Исследование систем управления. Раздел I. Исследования в развитии управления. Тест для самопроверки
1. Взаимосвязь методологии и организации исследования
методология определяет вид и форму организации
они не имеют прямой зависимости
организация определяет выбор методологии исследования
2. Функционирование системы управления – это …
процесс реализации системой ее функций
поддержание ее жизнедеятельности
работа в рамках достигнутого качества
3. Система управления – это совокупность…
элементов (кадров, структуры, коммуникаций, методов управления, культуры и т.д.)
звеньев, осуществляющих управление и связи между ними
компонентов объединенных общей целью
4. Основные признаки классификации фактов
содержание, направленность, организованность, комплексность, системность
существования, наличия, ценности факта, соответствие предмету исследования, достаточность фактов
отношение к объекту исследования, время использования, агрегированность, количественная и качественная определенность
определяет комплексный подход в исследовании
способствует упорядочению и ранжированию (проблем, факторов, условий и пр.
 )
)дает дополнительную информацию
6. Исследование — это …
способ получения дополнительной информации
вид деятельности человека, направлены на получение новой информации о проблеме
способ использования знаний в практической деятельности
7. Фактология исследования – это …
использование фактического материала в процессе исследования
система работы с фактами
8. Проблема – это …
направление исследования
совокупность информации о состоянии системы
противоречие, требующее разрешения
9. Исследование управления – это …
вид деятельности, одна из основных функций управления
научный труд
вид деятельности, позволяющий вскрыть суть и содержание явлений и процессов управления
10. Особенность исследования социально-экономических систем
затруднено получение объективной информации
размыты границы объекта исследования
ограничены возможности экспериментирования
11. Управление необходимо исследовать для …
эффективного совершенствования управления.
получения дополнительной информации при принятии решений.
12. Методология исследования – это …
совокупность методов исследования
логическая схема исследования
комплекс целей, средств и методов исследования
13. Главный признак концепции исследования
наличие всей необходимой информации
наличие ресурсов, необходимых для проведения исследования
комплекс ключевых положений по методологии и организации следования
14. Что дает менеджеру знание типологии исследования?
позволяет эффективно распорядиться ресурсами
определяет организацию исследования
дает объективную оценку проблемы
15. Объектом исследования в управлении является …
человек
проблема
система управления
Планирование в исследовании систем управления
Вопросы к зачету по курсу
“Исследование систем управления”
Основные направления системных исследований
Понятие «системы» и «системы управления»
Положительная и отрицательная обратная связь
Три слагаемых управления
Степень структурной сложности системы
Управленческие ситуации
Индуктивный и дедуктивный подходы к исследованию систем управления
Метод анализа иерархий.
 Общие понятия
Общие понятияМетод анализа иерархий. Алгоритм метода
Метод анализа иерархий. Отношение согласованности
Регрессионный анализ
Корреляционный анализ
Факторный анализ
Мозговой штурм
Сценарный метод
Дельфийский метод
Анкетирование и интервьюирование
Определение необходимой численности респондентов
Прогнозирование в исследовании систем управления
Планирование в исследовании систем управления
Ст. преподаватель А. Е. Дранников
КОНТРОЛЬНАЯ РАБОТА ПО ДИСЦИПЛИНЕ
«ИССЛЕДОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ» (ОБЪЕМ 15 СТР. МАШИНОПИСНОГО ТЕКСТА)
Первая буква фамилии студента: | Номер темы (один на выбор) |
А, Ж, Н, У, Щ | 1, 7, 13, 19, 25, 31, 37, 43, 49 |
Б, З, О, Ф | 2, 8, 14, 20, 26, 32, 38, 44, 50 |
В, И, П, Х, Э | 3, 9, 15, 21, 27, 33, 39, 45 |
Г, К, Р, Ц, Ю | |
Д, Л, С, Ч, Я | 5, 11, 17, 23, 29, 35, 41, 47 |
Е, М, Т, Ш | 6, 12, 18, 24, 30, 36, 42, 48 |
Тематика контрольных работ
1. Основные понятия и направления
системных исследований.
Основные понятия и направления
системных исследований.
2. Уровни исследований систем уравнения.
3. Основные виды систем управления, их связь с исследованием систем управления.
4. Основные подходы к исследованию систем управления.
5. Исследования системы управления при развитии.
6. Системный подход в исследованиях систем управления.
7. Опыт принятия рациональных решений в исследовании систем управления.
8. Опыт применения функционально-стоимостного анализа в исследовании систем управления.
9. Применение параметрических методов при исследовании систем управления.
10. Исследования систем управления с помощью факторного анализа.
11. Исследование систем управления с помощью тестирования.
12. Опыт исследования систем управления с помощью экспозитных методов.
13. Социологические методы исследования систем управления.
14. Исследование социально-экномических систем управления.
15. Процесс исследования систем управления.
16. Организация исследования систем управления.
17. Планирование в исследовании систем управления.
18. Опыт оценки эффектности исследования систем управления.
19. Исследование производственных систем управления.
20. Исследование систем управления проектированием.
21. Исследование систем управления финансами.
22. Исследование систем управления менеджментом.
23. Менеджер исследовательского типа и его роль в исследовании систем управления.
24. Роль методологии в исследовании систем управления.
25. Общенаучные методы в исследовании, систем управления.
26. Консультирование как форма исследования систем управления.
27. Образовательно-исследовательские структуры в системе управления.
28. Значение интегрального интеллекта в организации и исследовании систем управления.
29. Диверсификационные методы исследования
систем управления.
30. Методы творческого поиска в исследовании систем управления.
31. Оценки и основные показатели в исследовании систем управления.
32. Основная информация для исследования систем управления.
33. Этика проведения исследований систем управления.
34. Применение типовых представлений для исследования систем управления.
35. Применение моделирования при исследованиях систем управления.
36. Исследование систем управления и оценка безопасности.
37. Комплексные методы прогнозирования в исследованиях систем управления.
38. Математические методы планирования в исследованиях систем управления.
39. Исследования нормирования в системах управления.
40. Экспериментальные исследования систем управления.
41. Исследование систем управления методами финансового анализа.
42. Исследование систем управления на основе данных бухгалтерского учета.
43. Аудит как метод исследования систем управления.
44. Роль исследования при реструктуризации управления компании.
45. Управление предприятием по оказанию услуг и исследование его системы управления.
46. Использование информационных технологий при исследовании систем управления.
47. Исследование систем управления в экологии.
48. Исследование систем управления в курсовом проектировании.
49. Исследование систем управления в дипломном проектировании.
50. Исследование систем управления в области маркетинга.
ЛИТЕРАТУРА
1. Глущенко В.В., Глущенко И.И. Исследование систем управления: социологические, экономические, прогнозные, плановые, экспериментальные исследования. – г. Железнодорожный, Моск. обл.: ООО НПЦ “Крылья”, 2000.
2. Короткое Э.М. Исследование систем управления: Учебник. – М.: издательско-консалтинговая компания “ДеКа”, 2000.
3. Глущенко В.В., Глущенко И.И. Разработка
управленческого решения.
Прогнозирование-планирование. Теория
проектирования экспериментов. – г.
Железнодорожный, Моск. обл.: ТОО НПЦ
“Крылья”, 1997.
Теория
проектирования экспериментов. – г.
Железнодорожный, Моск. обл.: ТОО НПЦ
“Крылья”, 1997.
4. Мишин В. М. Исследование систем управления. – М.: ЮНИТИ-ДАНА, 2005.
5. Рассолов М.М., Элькин В.Д., Рассолов И.М. Правовая информатика и управление в сфере предпринимательства: Учебное пособие. – М.: Юристь, 1996.
6. Рейльян Я.Р. Основа принятия управленческих решений // М.: Финансы и статистика, 1989.
7. Саати Т., Кернс К. Аналитическое планирование. Организация систем. – М.: Радио и связь, 1991.
8. Статические и динамические экспертные системы: Учеб. пособие /Э.В. Попов, И.Б.Фоминых, Е.Б. Кисель, М.Д, Шапот. – М.: Финансы и статистика, 1996.
9. Статистика рынка товаров и услуг: Учебник/ И.К. Беляевский, Г.Д. Кулагина, А.В. Короткое и др.; под ред. И.К.Беляевского. – М.: Финансы и статистика, 1995.
10. Котлер Ф., Армстронг Г., Сондерс Д., Вонг В. Основы маркетинга: пер. с англ. – 2-е европ. изд. – М.; Спб.; К.: Издательский дом “Вильяме”, 2000.
11. Гительман Л.Д. Преобразующий менеджмент. – М.: Дело, 1999.
12. Мухин В.И. Исследование систем управления. М.: Изд. Нац. института бизнеса, 2000.
13. Исследование систем управления и системный анализ. 4.1, 2 / Н.В. Минеева, М.Е. Мотышик и др. / СПб.: Изд-во СПб. Унрверситета экономики и финансов, 2000.
14. Игнатьева А.В. Исследование систем управления. М.: ЮНИТИ-ДАНА, 2000.
15. Удальцова. Исследование социального управления. Новосибирск: НГАЗИУ, 2001.
16. Исследование организационного управления/И.Я.Львович, Ю.Н.Черняев и др. / Воронеж: Изд-во ВТГУ, 2001.
6. Целевой анализ систем управления. Исследование системы управления сетью “Эльдорадо”
Похожие главы из других работ:
Анализ и рекомендации по совершенствованию системы планирования запасов на торговом предприятии ООО “Стар Текс”
1.3 Классификация систем управления запасами на предприятии
1.3.1 Использование модели с фиксированным объемом заказа Само название говорит об основополагающем параметре системы. Это – размер заказа. Он строго зафиксирован и не меняется ни при каких условиях работы системы…
Это – размер заказа. Он строго зафиксирован и не меняется ни при каких условиях работы системы…
Анализ роли, значения и перспектив внедрения информационных технологий в области логистики
5.1 Примеры автоматизированных систем управления персоналом.
…
Виды запасов и их назначение
4.4 Сравнение основных систем управления запасами
Можно предположить идеальную ситуацию, в которой исполнение заказа происходит мгновенно (другими словами, время поставки равно нулю). Тогда заказ можно производить в момент, когда запасы материальных ресурсов на складе равны нулю…
Исследование системы управления сетью “Эльдорадо”
4. Информационный анализ систем управления
Основная цель информационного анализа состоит в исследовании информационных потоков систем. Анализ информационных потоков осуществляется на основе описания системы…
Исследование системы управления сетью “Эльдорадо”
7.Организационно-функциональный анализ систем управления
К основным задачам организационно- функционального анализа относятся следующие: Описание организационной структуры и проведение анализа ее связей. Как правило, существуют иерархичные информационные связи. Иерархичность предполагает…
Конкурентные преимущества пансионата “Море”
1.3 Характеристика организационной структуры управления, персонала и систем управления
Персонал пансионата и его характеристика в табл. 1 Таблица 1. Штатное расписание пансионата Должность Количество штатных единиц Тарифная ставка (оклад), грн. Директор 1 3750 Зам…
Методы исследования систем управления
Комплексированные методы исследования систем управления
Комбинаторика занимается различного вида соединениями, которые можно образовать из элементов конечного множества. Некоторые элементы комбинаторики были известны в Индии еще во II в. до н.э. Нидийцы умели вычислять числа…
до н.э. Нидийцы умели вычислять числа…
Особенности организации и менеджмента в компании сетевого маркетинга
1.1. Виды систем управления традиционных организаций
Система – это единство, состоящее из взаимосвязанных частей, каждая из которых приносит что-то конкретное в уникальные характеристики целого. Все организации представляют собой системы. Люди являются социальными компонентами системы…
Расчет эффективности функционирования логистической системы доставки грузов
1.1 Описание систем управления запасами
Понятие материального запаса является одним из ключевых в логистике. Продвигаясь по материалопроводящей цепи, сырье (а впоследствии полуфабрикат и готовый продукт) периодически задерживается…
Системный анализ в исследовании систем управления
1 СИСТЕМНЫЙ АНАЛИЗ КАК НАУЧНЫЙ ПРОЦЕСС В ИССЛЕДОВАНИИ СИСТЕМ УПРАВЛЕНИЯ
…
Управление запасами
6. Виды систем управления запасами
Оперативные решения, касающиеся момента размещения и размера заказа, реализуются с помощью выбранной контрольной системы. Существует много разных типов контрольных систем. Они реализуются в привязке к блоку прогнозирования спроса. В табл…
Управление качеством на предприятии
1.3 Совершенствование систем управления качеством на основе стандартов
Управление качеством на предприятии осуществляется на основании стандартов предприятия регламентирующих общесистемные вопросы информационного обеспечения, порядок разработки, оформления, утверждения и внедрения стандартов предприятия…
Управление товарными запасами в торговом предприятии и на предприятиях пищевой промышленности
1.4 Виды систем управления запасами
Оперативные решения, касающиеся момента размещения и размера заказа, реализуются с помощью выбранной контрольной системы. Существует много разных типов контрольных систем. Они реализуются в привязке к блоку прогнозирования спроса. В табл…
В табл…
Управление товарными запасами оптового (розничного) торгового предприятия (на материалах ОАО “Промприбор”)
1.3 Сравнительная характеристика базовых систем управления запасами
Сравнение основных систем управления запасами приведено в таблице 1. Таблица 1 ? Сравнение основных систем управления запасами Система Преимущества Недостатки 1 2 3 С фиксированным размером заказа 1…
Функциональные области логистики
2.5 Исследование современных систем логистического управления производством
Современное состояние логистики и её развитие во многом сформировалось благодаря бурному развитию и внедрению во все сферы бизнеса информационно-компьютерных технологий. Реализация большинства логистических концепций (систем) таких как SDP, JIT…
Какова роль практики в исследовании систем управления 2, Системы управления
Пример готового реферата по предмету: Системы управления
Введение
1 Теоретико-методологические основы исследования систем управления
2 Основные виды систем управления
3 Значение практических методов в исследовании систем управления
Заключение
Список литературы
Содержание
Выдержка из текста
Современный менеджмент только тогда может быть действительно успешным, когда он находится в постоянном и непрерывном развитии, когда он ориентирован на изменения, обеспечивающие жизнестойкость организации и накопление ею потенциала инноваций и целеустремленности.
Методологией является некая закономерная организация человеческой деятельности, суть которой заключается в формировании цепи и предмета исследования, так же подходов и цели в его проведении, выборе средств и методик, которые определяют положительный результат. Но в успешности исследовательской деятельности методология занимает важнейшую, определяющую роль.Целью любого исследования является исследование самых эффектных вариантов для строения системы управления и организации ее действия и развития.
Проблемы принятия решений в осложненных условиях занимают в настоящее время особое место в информационных технологиях. Математические методы стали широко применяться для описания и анализа сложных технических, экономических, социальных и других систем.При управлении сложными системами различного назначения, специалисты часто сталкиваются с наличием в описании системы нечетко заданных параметров или неточной технологической информации.
Важную роль играет гипотеза (от греч. hypothesis – предположение) — научное предварительное недостаточно доказанное объяснение (предположение, предсказание) новых явлений и событий, требующее в последующем экспериментальной проверки.Целью написания данной работы является разработка концепции и гипотезы в исследовании системы управлении. анализ разработки концепции и гипотезы исследования систем управления;
В связи с этим на практике перед руководством организаций всегда актуальна задача выбора наиболее эффективного варианта планирования исследований систем управления.Необходимо отметить, что планирование в исследованиях систем управления является составной частью методов исследования и оценки эффективности систем управления, и применяется в имитационном моделировании, а также для решения экстремальных задач в сфере систем управления.
В настоящем реферате рассмотрена и описана функциональная роль исследования.Основной источник познания, его движущая сила, основной потребитель его результатов и основной критерий истины – практика.
Методы исследования систем управления играют большую роль в эффективной работе любого предприятия (организации ) так, как позволяют определить проблемные участки в одном из самых важных звеньев функционирования предприятия в управленческом аппарате. Целью написания данного реферата является классификация и обобщение методов применяемых в исследованиях систем управления.Предметом исследования являются: классификация и обобщение методов исследования систем управления.
Социологические исследования систем управления
Задачи: в работе затрагиваются вопросы, касающиеся толкования понятия «организационная структура управления персоналом», типов организационных структур управления персоналом, рассматриваются методологические основы исследований систем управления, проводится анализ системы управления на примере Учебного центра «Нахабино».
В России туристический бизнес развивается с преимущественной ориентацией на выезд. Подавляющее большинство действующих у нас туристических фирм предпочитают заниматься направлением своих соотечественников за рубеж, и лишь небольшая их часть работает на привлечение гостей в РФ. Хотя последние годы тенденция начинает меняться и наши русские граждане предпочитают выбирать российские курорты, такие как Крым и Сочи.
Список источников информации
Афонин, И.В. Управление развитием предприятия: Стратегический менеджмент, инновации, инвестиции, цены [Текст]: учебное пособие / И.В. Афонин. – М.: «Дашков и К», 2002. – 380 с.
2. Долятовский, В.А. Исследование систем управления [Текст]: учебник / В.А. Долятовский, В.Н. Долятовская. – М.: МарТ, 2003. – 256 с.
3. Иванов, В.В. Подходы к формированию систем эффективного менеджмента [Текст]
/ В.В. Иванов, О.К. Хан, П.В. Богаченко, А.Н. Коробова // Менеджмент в России и за рубежом, 2007, № 5. – С. 20-30.
4. Игнатьева, А.В. Исследование систем управления [Текст]: учебное пособие / А.В. Игнатьева, М.М. Максимов. – М.: ЮНИТИ-ДАНА, 2000. – 157 с.
5. Коротков, Э.М. Исследование систем управления [Текст]: учебник / Э.М. Коротков. – М.: ДеКА, 2004. – 336 с.
6. Мельников, В.П. Исследование систем управления [Текст]: учебник / В.П. Мельников. – М.: Академия, 2008. – 336 с.
7. Мишин, В.М. Исследование систем управления [Текст]: учебник / В.М. Мишин. – М.: ЮНИТИ-ДАНА, 2008. – 527 с.
8. Мухин, В.И. Исследование систем управления [Текст]: учебник / В.И. Мухин. – М.: Экзамен, 2006. – 480 с.
9. Рогожин, С.В. Исследование систем управления [Текст]: учебник / С.В. Рогожин, Т.В. Рогожина. – М.: Экзамен, 2005. – 288 с.
10. Управление организацией [Текст]: учебник / под ред. А.Г. Поршнева, З.П. Румянцевой, И.А. Саломатина. – М.: ИНФРА-М, 2007. – 736 с.
список литературы
| Контрольная работа по дисциплине «управление персоналом» Сдал: Студент 4-го курса Содержание курса – принципы и методы управления персоналом, теоретические и практические проблемы функционирования систем управления.  .. .. | Программа минимум кандидатского экзамена по специальности 08. 00. 13 «Математические и инструментальные методы экономики» «Исследование систем управления», «Управленческие решения», «Информационные технологии управления», «Стратегический менеджмент»,… | ||
| Исследование систем управления содержание Вы – менеджер одной из фирм. Вам предложено провести системное исследование системы управления производством. Какую многоуровневую… | Рогожина Татьяна Вадимовна, к т. н., доцент должность профессор учебно-методический комплекс исследование Учебно-методический комплекс исследование систем управления составлен в соответствии с требованиями Государственного образовательного… | ||
| М. А. Сонькин 2011 г. Рабочая программа Пререквизиты: «Теория автоматического управления», «Технические средства систем автоматики и управления», «Локальные системы управления»,… | Ф тпу 1 21/01 Контрольные вопросы Общие понятия. Структурное представление систем управления Анализ дискретных систем управления. Взаимосвязь методов описания дискретных и непрерывных систем управления | ||
| Образовательная программа Общеобразовательная программа (название образовательной программы) Дисциплина Математическое и программное обеспечение компьютерных систем управления (название дисциплины) Семестр 9 Целью изучения дисциплины является: ознакомление с математическим аппаратом, используемым в теории цифровых систем управления; изучение… | Направление ооп: 220400 – Управление в технических системах … | ||
| Рабочая программа дисциплины технические средства систем автоматики и управления Пререквизиты: «Теоретические основы электротехники», «Теория автоматического управления», «Метрология и измерительная техника», «Электроника»,… | Совершенствование систем управления персоналом в фирме Исследование эффективности методов управления человеческими ресурсами в компаниях |
Контрольная работа №2 по дисциплине «Исследование систем управления»
Частное образовательное учреждение высшего профессионального образования«Санкт-Петербургский Институт Экономики, Культуры и Делового Администрирования»
Контрольная работа № 2
по дисциплине «Исследование систем управления»
составитель
доцент кафедры ОиСМ
к. воен.н., доцент Лисенко В.К.
воен.н., доцент Лисенко В.К.
ТРЕБОВАНИЯ
к выполнению и оформлению контрольной работы
1. Работа считается выполненной в том случае, если в ней имеются ответы на более чем 50% поставленных вопросов.
2. Работа оценивается по четырехбалльной системе по критериям:
– «отлично» – если на все вопросы даны верные и полные развёрнутые ответы, в которых усматривается авторская позиция студента;
– «хорошо» – если есть ответы на все поставленные вопросы, но в ответах усматривается отступления от современной управленческой парадигмы (устаревший подход) и слабо просматривается авторская позиция студента;
– «удовлетворительно» – если на все вопросы даны верные и полные развёрнутые ответы, но в них не усматривается авторская позиция студента;
– «неудовлетворительно» – если имеются ответы на менее чем 50% поставленных вопросов даже при удовлетворении требований к более высоким оценкам.
3. Работа выполняется в компьютерном наборе при соблюдении типовых требований (смотри «Правила выполнения курсовых работ»).
4. Для изложения ответа по каждому из поставленных вопросов необходимо отвести отдельную страницу (несколько отдельных страниц). Ссылка на источник обязательна! Простое цитирование источника без изложения комментария (собственного мнения) снижает оценку.
Примечания: информацию по выделенным вопросам можно найти в работах И. Acтaшкиной и B. Мишина, А. Зайцева, а также Д. Шевчука и других авторов с общим названием «Исследование систем управления».
Вариант 1
Блок вопросов
1. Метод «мозговой атаки», сущность и общее описание. Использование метода в ИСУ.
2. Эксперименты в ИСУ. Назовите наиболее применимый на ваш взгляд тип эксперимента.
3. Анкетирование в ИСУ. К какому классу методов относится анкетирование?
Вариант 2
Блок вопросов
1. Метод «Дельфи» – сущность, содержание и применение в ИСУ. В чём сходство с методом «мозговой атаки»? В чём заключается главное отличие?
2. Интервью как устная форма опроса: сущность, применимость в ИСУ, общая классификация.
Интервью как устная форма опроса: сущность, применимость в ИСУ, общая классификация.
3. Синектика как метод исследования систем управления. К каким системам управления целесообразно применять этот метод?
Вариант 3
Блок вопросов
1. Метод экспертных оценок в ИСУ: условия применения, решаемые проблемы. Кто, по вашему мнению, может привлекаться в качестве экспертов?
2. Нужно ли планирование при ИСУ? Если «да», то в чём его сущность и каково содержание плана?
3. Допустимо ли экспериментирование при проведении ИСУ? Если «да», то какие виды экспериментов целесообразно использовать в малом бизнесе?
Вариант 4
Блок вопросов
1. Метод «сценариев» – сущность, содержание, применение в ИСУ. Кто пишет сценарии, и кто внедряет их в жизнь?
2. Опишите методику проведения «мозговой атаки». В чём сущность «обратной мозговой атаки»? Какую «атаку» на ваш взгляд следует считать предпочтительной?
3. Приведите известную вам классификацию экспериментов, используемых при проведении ИСУ. Какие из них уместны в крупном бизнесе и почему?
Вариант 5
Блок вопросов
1. Метод SWOT-анализа: сущность, содержание, применение в ИСУ. В чём могут заключаться сильные и слабые стороны, возможности и угрозы системы управления?
2. Обязательно ли нужно составлять бизнес-план при организации исследований систем управления? Для каких систем он уместен?
3. Что такое контент-анализ в ИСУ? Что такое традиционный и формальный анализ? Можно ли получить количественные оценки при данном виде анализа?
Вариант 6
Блок вопросов
1. Метод «дерева целей» – сущность, содержание, применение в ИСУ. Относится ли миссия к целям и что она отображает?
2. Опрос как частный метод ИСУ. Кто кого и о чём опрашивает? Какие два вида опроса существует? Для какого вида (уровня) бизнеса уместен данный метод?
3. Приведите классификацию интервью в ИСУ по способам осуществления контактов. Можно ли брать интервью по телефону, и какие при этом возникают особенности? Какие современные виды интервью вам известны?
Можно ли брать интервью по телефону, и какие при этом возникают особенности? Какие современные виды интервью вам известны?
Вариант 7
Блок вопросов
1. Назовите наиболее часто используемые (4-5) технологии ИСУ. Какая из выделенных вами технологий наиболее приемлема в сфере среднего бизнеса?
2. Дайте определение понятия «логика». Какие формы мышления относятся к логическому аппарату ИСУ? В чём проявляется основное различие между суждением и умозаключением?
3. Охарактеризуйте консультирование как одну из форм проведения ИСУ. В масштабах какого бизнеса (на каком уровне) наиболее часто прибегают к консультированию? Насколько широко используется консалтинг в РФ?
Вариант 8
Блок вопросов
1. Что такое диагностика в ИСУ? Опишите сущность организационной, функциональной и кадровой диагностики при проведении ИСУ.
2. Что такое исследовательский потенциал управления? Какие факторы формируют исследовательский потенциал управления?
3. Что такое креативное образование? Какова роль и влияние креативного образования на процесс ИСУ? Каков, на ваш взгляд, уровень креативности отечественных исследователей?
Вариант 9
Блок вопросов
1. Как понимать подход, который декларирует, что исследование является составной частью менеджмента организации? Решение каких задач предполагает такой подход?
2. Охарактеризуйте основные источники информации, которая потребуется при организации и проведении исследования систем управления. Какие из приведённых вами источников заслуживают наибольшего доверия?
3. Почему в процессе ИСУ необходимо анализировать структуры управления? Можно ли использовать типовые варианты структур?
Вариант 10
Блок вопросов
1. Тестирование в ИСУ. Назовите области применения тестов, которые наиболее часто используются в процесс ИСУ. Что такое валидность и надёжность теста?
2. Что такое моделирование в ИСУ. Назовите основные требования к моделям в ИСУ. Дайте краткую характеристику экономико-математическим и имитационным моделям. Какие из них чаще всего используются в ИСУ?
Дайте краткую характеристику экономико-математическим и имитационным моделям. Какие из них чаще всего используются в ИСУ?
3. Что такое факторный анализ и как его можно применять в ИСУ? Перечислите основные задачи в ИСУ, которые можно решать с помощью факторного анализа. Насколько широко, на ваш взгляд, применяется в ИСУ факторный анализ?
Система управления | технология | Британника
Система управления означает, что переменное количество или набор переменных величин приводится в соответствие с предписанной нормой. Он либо сохраняет значения контролируемых величин постоянными, либо заставляет их изменяться заданным образом. Система управления может работать с помощью электричества, механических средств, давления текучей среды (жидкости или газа) или сочетания средств. Когда в цепи управления задействован компьютер, обычно удобнее управлять всеми системами управления электрически, хотя довольно часто встречаются смеси.
Разработка систем управления.
Системы управлениятесно связаны с концепцией автоматизации ( q.v. ), но два основных типа систем управления, с прямой связью и обратной связью, имеют классическое происхождение. Ткацкий станок, изобретенный Жозефом Жаккаром из Франции в 1801 году, является ранним примером прямой связи; набор перфокарт, запрограммированных на ткацкие станки; никакая информация из процесса не использовалась для исправления работы машины. Подобное упреждающее управление было включено в ряд станков, изобретенных в 19 веке, в которых режущий инструмент повторял форму модели.
Управление с обратной связью, при котором информация из процесса используется для корректировки работы машины, имеет еще более давнюю историю. Римские инженеры поддерживали уровень воды в своей системе акведуков с помощью плавающих клапанов, которые открывались и закрывались на соответствующих уровнях. Голландская ветряная мельница 17 века удерживалась лицом к ветру за счет действия вспомогательной лопасти, которая перемещала всю верхнюю часть мельницы. Самым известным примером промышленной революции является управляющий шаровым шаром Джеймса Ватта 1769 года, устройство, которое регулировало поток пара в паровой двигатель для поддержания постоянной скорости двигателя, несмотря на изменяющуюся нагрузку.
Самым известным примером промышленной революции является управляющий шаровым шаром Джеймса Ватта 1769 года, устройство, которое регулировало поток пара в паровой двигатель для поддержания постоянной скорости двигателя, несмотря на изменяющуюся нагрузку.
Первый теоретический анализ системы управления, который представил модель регулятора Ватта на основе дифференциального уравнения, был опубликован Джеймсом Клерком Максвеллом, шотландским физиком, в 19 веке. Вскоре работа Максвелла была обобщена, и теория управления была развита на основе ряда работ, в том числе заметного исследования системы автоматического рулевого управления американского линкора «Нью-Мексико», опубликованного в 1922 году. В 1930-х годах появилась электрическая обратная связь в междугородной телефонной связи. усилители и общую теорию сервомеханизма, с помощью которой небольшое количество мощности управляет очень большим количеством и вносит автоматические поправки.Затем последовали пневматический контроллер, лежащий в основе разработки первых автоматизированных систем в химической и нефтяной промышленности, и аналоговый компьютер. Все эти разработки легли в основу разработки теории систем управления и приложений во время Второй мировой войны, таких как зенитные батареи и системы управления огнем.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас Большинство теоретических исследований, а также практических систем до Второй мировой войны были одноконтурными – i.е., они включали просто обратную связь из одной точки и корректировку из одной точки. В 1950-х годах исследовались возможности многоконтурных систем. В этих системах обратная связь может инициироваться более чем в одной точке процесса, а корректировки вноситься более чем в одной точке. Внедрение аналогового и цифрового вычислительного оборудования открыло путь для гораздо большей сложности теории автоматического управления, шаг вперед, получивший название «современное управление», чтобы отличить его от более старого, более простого «классического управления». ”
”
Основные принципы.
За немногими и относительно незначительными исключениями, все современные системы управления имеют две общие основные характеристики. Их можно описать следующим образом: (1) Величина контролируемой величины изменяется двигателем (это слово используется в обобщенном смысле), который получает энергию от локального источника, а не от входящего сигнала. Таким образом, имеется большое количество энергии для осуществления необходимых изменений контролируемой величины и для гарантии того, что операции изменения регулируемой величины не загружают и не искажают сигналы, от которых зависит точность управления.(2) Скорость, с которой энергия подается в двигатель для изменения значения контролируемой величины, определяется более или менее напрямую некоторой функцией разницы между фактическим и желаемым значениями регулируемой величины. Таким образом, например, в случае термостатической системы нагрева подача топлива в печь определяется тем, выше или ниже фактическая температура желаемой температуры. Система управления, обладающая этими основными характеристиками, называется системой управления с обратной связью или сервомеханизмом (см. Рисунок).Системы управления с обратной связью – это системы с прямой связью.
Основные компоненты типичной системы управления с обратной связью
Encyclopædia Britannica, Inc. Стабильность системы управления в значительной степени определяется ее реакцией на внезапно приложенный сигнал или переходный процесс. Если такой сигнал заставляет систему чрезмерно корректировать себя, может возникнуть явление, называемое «поиском», при котором система сначала чрезмерно корректирует себя в одном направлении, а затем чрезмерно корректирует себя в противоположном направлении.Поскольку охота нежелательна, обычно принимаются меры по ее исправлению. Самая распространенная корректирующая мера – добавление демпфирования где-нибудь в системе. Демпфирование замедляет реакцию системы и позволяет избежать чрезмерных выбросов или корректировок. Демпфирование может проявляться в виде электрического сопротивления в электронной цепи, применения тормоза в механической цепи или нагнетания масла через небольшое отверстие, как при демпфировании амортизатора.
Демпфирование может проявляться в виде электрического сопротивления в электронной цепи, применения тормоза в механической цепи или нагнетания масла через небольшое отверстие, как при демпфировании амортизатора.
Другой метод проверки устойчивости системы управления – определение ее частотной характеристики – i.е., его реакция на непрерывно изменяющийся входной сигнал на различных частотах. Затем выходной сигнал системы управления сравнивается с входным сигналом по амплитуде и фазе – , то есть степень несогласованности входных и выходных сигналов. Частотная характеристика может быть определена экспериментально, особенно в электрических системах, или рассчитана математически, если постоянные системы известны. Математические вычисления особенно полезны для систем, которые могут быть описаны обыкновенными линейными дифференциальными уравнениями.Графические ярлыки также очень помогают в изучении реакции системы.
Несколько других методов используются при разработке современных систем управления. Адаптивное управление – это способность системы изменять свои собственные операции для достижения наилучшего режима работы. Общее определение адаптивного управления подразумевает, что адаптивная система должна быть способна выполнять следующие функции: предоставление непрерывной информации о текущем состоянии системы или идентификация процесса; сравнение текущей производительности системы с желаемой или оптимальной производительностью и принятие решения об изменении системы для достижения определенной оптимальной производительности; и инициирование надлежащей модификации для приведения системы управления в оптимальное состояние.Эти три принципа – идентификация, решение и модификация – присущи любой адаптивной системе.
Управление с динамической оптимизацией требует, чтобы система управления работала таким образом, чтобы выполнялся определенный критерий производительности. Этот критерий обычно формулируется таким образом, что управляемая система должна переместиться из исходного положения в новое за минимально возможное время или с минимальными общими затратами.
Управление обучением подразумевает, что система управления обладает достаточными вычислительными возможностями, чтобы она могла создавать представления математической модели управляемой системы и изменять свои собственные операции, чтобы воспользоваться преимуществами этих недавно разработанных знаний.Таким образом, обучающаяся система управления является дальнейшим развитием адаптивного контроллера.
Управление с несколькими переменными без взаимодействия включает большие системы, в которых размер внутренних переменных зависит от значений других связанных переменных процесса. Таким образом, одноконтурных методов классической теории управления будет недостаточно. Для разработки соответствующих систем управления такими процессами необходимо использовать более сложные методы.
Системы управленияповсеместны | IEEE Control Systems Society
Содержание:
1 Что такое Control?
2 Как это работает?
3 Обратная связь
4 Ваша интуиция может дать сбой
5 Различные проблемы
1 Что такое контроль?
Контроль повсеместен.Мы живем своей повседневной жизнью в окружении всевозможных систем контроля, и по большей части мы о них не подозреваем.
Все, что движется, изменяется во времени, имеет динамику, и для того, чтобы эта динамика функционировала должным образом, необходимо контролировать. Контроль управляет или регулирует, как система ведет себя или функционирует. Вертолет сразу упадет, как только его контроллер перестанет работать. Наше тело – это огромная совокупность систем управления: клетки, ткани, органы – все функционируют в соответствии с определенными биологическими, химическими или физическими правилами, и ими управляют.Без контроля наше сердце выйдет из строя или даже перестанет работать, и мы перестанем жить. Все электрические / электронные приборы контролируются в соответствии с некоторыми законами о контроле. В их число входят кондиционеры, холодильники, телевизоры, радио, аудио- и видеоплееры и, конечно же, компьютеры.
Автомобили и самолеты полны систем управления. Подача топлива в автомобиль теперь тщательно контролируется системой впрыска топлива. Автомобильный двигатель может стукнуть или заглохнуть, если его угол опережения зажигания не контролируется должным образом.Самолет должен контролировать свое направление, трехмерные положения (углы рыскания, тангажа и крена), а для поддержания его правильного положения в полете используются усовершенствованные механизмы управления.
Контроль – это фундаментальная дисциплина, лежащая в основе всей нашей жизни. Общество систем управления IEEE нацелено на разъяснение его далеко идущих возможностей, поиск различных новых и интересных приложений и изучение еще неизвестных новых методологий, которые способствуют улучшению жизни людей.
Более сложные и современные примеры см. На нашей странице « Impact of Control Technology »:
2 Как это работает?
Давайте посмотрим на очень простой пример: бросить бейсбольный мяч в ловушку.Один говорит, что подающий имеет хороший контроль, если он / она может манипулировать необходимыми мышцами, чтобы мяч достиг целевой позиции кэтчера; в противном случае кувшин не контролирует мяч.
В этом примере контроля есть два основных аспекта, которые отличаются от того, что мы обычно считаем контролем:
- Управление осуществляется человеком, т.е. это ручное управление. Обычная схема управления, которую мы сегодня рассматриваем, является автоматической и не требует вмешательства человека.
- Управление без обратной связи.То есть, когда мяч подброшен в воздух, не существует механизма для регулировки его курса в соответствии с текущим состоянием мяча 1, .
Для первого пункта было бы лучше, если бы управление могло осуществляться автоматически, не полагаясь ни на какие человеческие усилия. Если нам придется всегда включать и выключать кондиционер вручную, это будет довольно неприятно; Конечно, до появления современных систем кондиционирования воздуха нам приходилось делать что-то подобное, чтобы справляться с изменениями температуры в помещении.
Этот пример также показывает решающее различие между человеческим контролем и автоматическим контролем. Любая разумная система кондиционирования воздуха включает в себя какую-то автоматическую сенсорную систему, которая взаимодействует с контроллером, так что нам не нужно постоянно регулировать настройку температуры. В частности, система измеряет температуру в помещении и передает ее обратно в систему.
Идея измерения состояния системы, температуры в приведенном выше случае, представляет собой ключевую идею обратной связи.Это центральное место в идее контроля.
1 Существует связанная концепция управления с прогнозированием, при которой управление может происходить в течение всего курса действий, но нет механизма для исправления поведения системы, пока система продолжает двигаться.
3 Обратная связь
Концепция обратной связи является центральной для большинства систем управления. В упомянутой выше системе кондиционирования воздуха система измеряет температуру, вычисляет разницу между предварительно установленной желаемой эталонной температурой и текущей комнатной температурой и передает ошибку обратно в систему, возможно, с некоторой обработкой контроллером.Эта схема способна справиться с колебаниями температуры окружающей среды. Если по какой-либо причине температура становится выше, система кондиционирования воздуха автоматически регулирует температуру в помещении без нашего взаимодействия с системой.
Эта отличная идея явно не применима к бейсбольной подаче. Как только мяч подброшен в воздух, изменить его курс уже невозможно. Следовательно, если есть помехи, например ветер, после того, как мяч был брошен, или если питчер обнаружил ошибку в своем броске, нет возможности компенсировать такие проблемы.Если бы только у мяча был мозг и он мог сам управлять своим направлением! 2
Feedback – воплощение этой мечты. Если управляемый объект (часто называемый заводом) подвергается колебаниям или возмущениям, система управления автоматически обнаруживает такие изменения и регулирует систему, возвращая соответствующее управляющее воздействие на установку.
Центробежный регулятор Джеймса Ватта (рис. 1), как известно, является первым примером этого принципа управления с обратной связью. 3 .Он измеряет скорость вращения парового двигателя и регулирует подачу пара в двигатель по сравнению с заданной скоростью вращения. Хотя все обрабатывались механически, преимущество автоматической регулировки постоянной скорости было очевидным, и это изобретение легко привело к впечатляющему успеху, который сегодня известен как промышленная революция.
Рисунок 1: Центробежный регулятор Ватта, Музей науки, Лондон
Здесь отметим, что не все системы автоматического управления являются системами управления с обратной связью.Некоторые грубые системы, например тостер для хлеба или стиральная машина, обычно не относятся к типу обратной связи, они обрабатывают управляющее воздействие в соответствии с заранее заданным способом управления и не отражают изменений, основанных на поведении системы. В этом смысле такое управление носит упреждающий характер. Но должно быть ясно, что любое расширенное автоматическое управление должно иметь какой-то механизм обратной связи. 4
Рисунок ?? показана типичная система управления, называемая единой системой обратной связи.«Единство» здесь означает, что здесь контур обратной связи имеет коэффициент усиления 1. Но его можно заменить любым коэффициентом усиления или даже более сложной системой. Это просто вопрос калибровки. Здесь важны следующие шаги:
- вычислить сигнал ошибки e (t): = r (t) y (t) и
- подать e обратно на завод P с некоторой обработкой управления C , чтобы ошибка e (t) стремится к нулю, поскольку t стремится к бесконечности.
Рисунок 2: Система обратной связи Unity
Каким бы простым это ни казалось, этот принцип хорошо работает во многих типичных примерах.Многие повседневные приложения имеют целью отслеживание до постоянного предварительно установленного значения, и для этой цели вышеупомянутая идея работает, принимая r как постоянную функцию; когда нужно изменить этот параметр, мы просто изменить значение ссылки. То есть мы имеем дело с проблемой отслеживания до ступенчатой функции. Такими примерами являются установка температуры для системы кондиционирования воздуха, установка пола лифта к месту назначения, крейсерская скорость автомобиля.
То есть мы имеем дело с проблемой отслеживания до ступенчатой функции. Такими примерами являются установка температуры для системы кондиционирования воздуха, установка пола лифта к месту назначения, крейсерская скорость автомобиля.
Конечно, работает этот метод или нет, полностью зависит от выбора или конструкции C .В таком случае есть интересная ловушка, и мы завершаем эту короткую заметку указанием на эту проблему.
2 Есть известная опера «Der Freish • utz» Карла Марии фон Вебера, которая выражает человеческое желание, чтобы пуля могла контролировать себя и поражать цель, что бы ни случилось.
3 Регуляторы использовались для других целей, например, для управления ветряными мельницами. Однако утверждается, что такие примеры не включают обратную связь, и изобретение Ватта, вероятно, является первым примером, в котором обратная связь используется явно.
4 В 1990-е годы нечеткое управление было довольно модным для некоторых электроприборов, например, стиральных машин; но теперь бум, кажется, ушел.
4 Ваша интуиция может дать сбой
Давайте посмотрим на простую задачу отслеживания. Рассмотрим случай лифта, в котором люди нажимают кнопку, чтобы ввести желаемое значение ссылки в систему. Допустим, вы хотите подняться на 23-й этаж и нажать кнопку №2. 23. Индикатор преобразуется в электронный сигнал, часто в напряжение, и используется в качестве сигнала, которым необходимо управлять.При таком преобразовании текущее положение (высота) представляется сигналом напряжения, а цель управления – отслеживать текущее положение точно до положения, которое соответствует 23-му этажу.
Если лифт разгоняется до некоторой постоянной скорости, а затем пытается остановиться, когда вы достигаете этажа 23, лифт не может остановиться немедленно из-за инерции. Происходит перерегулирование. Следовательно, когда вы достигнете целевого этажа, скорость должна быть равна нулю. Как мы можем это сделать?
Простая идея может заключаться в том, чтобы наблюдать за ошибкой между текущей позицией и целевой позицией и передавать ее обратно в систему в соответствии с конфигурационным рисунком ??. Вероятно, будет использоваться постоянный коэффициент усиления K для контроллера C , умноженный на сигнал ошибки e , а затем применить его к P .
Вероятно, будет использоваться постоянный коэффициент усиления K для контроллера C , умноженный на сигнал ошибки e , а затем применить его к P .
К счастью, эта простая идея работает. Но есть загвоздка. Все зависит от того, как построена система. Обычно входной сигнал подается на двигатель лифта, где производная θ пропорциональна входу Ke . Здесь θ – угол поворота двигателя, параллельный расстоянию (и, следовательно, высоте), которое проходит лифт.Ключевым фактом здесь является то, что ввод ошибки Ke должен быть однажды интегрирован, чтобы он стал углом поворота и, следовательно, пропорционален фактическому расстоянию (или высоте).
Хотя мы опускаем его формальное доказательство (которое преподается на любом первом курсе курса управления, и оно довольно простое), включение такого интегратора необходимо для отслеживания произвольных ступенчатых функций; и это устойчиво при небольшом изменении параметров установки, при условии, что общая стабильность сохраняется.Это частный случай того, что теперь известно как принцип внутренней модели.
То есть, если система с обратной связью надежно отслеживает внешние входные данные, система с обратной связью должна содержать модель, которая генерирует это семейство экзогенных сигналов.
Если, с другой стороны, кто-то попытается поднять лифт, разрешив постоянную скорость, это всегда приведет к ошибке в отслеживании, называемой «смещением». Можно выполнить калибровку, чтобы остановить лифт, измерив, насколько близко лифт находится к месту назначения, но эта калибровка должна выполняться для каждого этажа и может быть довольно громоздкой.К тому же характеристики лифта невозможно узнать точно. Теория управления может дать универсальный рецепт для решения таких и более общих проблем.
5 различных выпусков
Существуют различные вопросы, требующие дальнейшего изучения. Как отмечалось выше, для задачи отслеживания шагов рисунок ?? работает и отслеживает назначенный опорный сигнал при условии, что эта система остается стабильной и система содержит интегратор в прямом контуре. Если есть ошибка моделирования или колебания P, система продолжает работать нормально при условии, что вышеуказанные условия удовлетворены.То есть свойство отслеживания здесь устойчиво к колебаниям растений. Это большое преимущество обратной связи и внутренней модели, которое не может быть достигнуто с наивной точки зрения (например, с помощью управления с прогнозированием). Таким образом, надежность является центральным вопросом при разработке системы управления; без надежности спроектированная система может не работать при различных колебаниях. Что касается проблем того же типа, адаптация пытается изменить контроллер C в соответствии с изменениями, происходящими в установке P .Таким образом, адаптивное управление направлено на изменение контроллера C при изменении P .
Если есть ошибка моделирования или колебания P, система продолжает работать нормально при условии, что вышеуказанные условия удовлетворены.То есть свойство отслеживания здесь устойчиво к колебаниям растений. Это большое преимущество обратной связи и внутренней модели, которое не может быть достигнуто с наивной точки зрения (например, с помощью управления с прогнозированием). Таким образом, надежность является центральным вопросом при разработке системы управления; без надежности спроектированная система может не работать при различных колебаниях. Что касается проблем того же типа, адаптация пытается изменить контроллер C в соответствии с изменениями, происходящими в установке P .Таким образом, адаптивное управление направлено на изменение контроллера C при изменении P .
Стабильность упоминалась выше. Исследование устойчивости системы управления является центральным вопросом с самого начала теории управления. Если система нестабильна, то есть нестабильна, ее необходимо стабилизировать, разработав соответствующий контроллер. Стабильность и стабилизация были и остаются еще одним центральным вопросом теории управления.
В приведенном выше примере система моделируется как линейная система; однако большинство систем в мире нелинейны.Линейные модели часто хорошо работают около точки равновесия, но не намного дальше. Что мы можем и должны делать с нелинейными системами? Как мы можем работать с нелинейными системами – еще одна основная тема наших исследований.
Существуют также линейные системы, состояние которых зависит от пространственных параметров. Такие системы с распределенными параметрами встречаются во многих практических ситуациях, например, при передаче тепла, системах с задержками передачи и т. Д., И они обладают конечномерными пространствами состояний.Исследования таких систем также представляют наш центральный интерес.
Все наши исследования во многом зависят от модели, которую мы используем. Как получить такую модель? Даже если существуют некоторые теоретические модели, основанные на первых принципах, например, закон Ньютона, многие системы слишком сложны. В таком случае идентификация находит свою роль в создании модели, основанной на внешних поведенческих данных. Моделирование и идентификация также являются очень важными элементами в наших исследованиях.
Как получить такую модель? Даже если существуют некоторые теоретические модели, основанные на первых принципах, например, закон Ньютона, многие системы слишком сложны. В таком случае идентификация находит свою роль в создании модели, основанной на внешних поведенческих данных. Моделирование и идентификация также являются очень важными элементами в наших исследованиях.
Давайте кратко рассмотрим другие, возможно, более свежие проблемы.Могут быть системы, состоящие из разнородных компонентов. Например, системы, работающие в разных наборах времени или в масштабах времени, системы, которые в основном управляются происходящими событиями, а не временем и т. Д. Такие системы являются гибридными. Многие управляющие действия определяются руководителем, например компьютерами, и их общее поведение является активной темой исследования.
Также некоторые управляющие воздействия могут передаваться через сеть, и такие сетевые системы управления требуют более глубокого изучения их поведения и общей стабильности.В настоящее время это очень актуальная тема для исследований.
Биологические системы – это чудо сложного нелинейного поведения, которое объединяет множество функций. Системная биология активно изучается и, как ожидается, приведет к прорывам в области медицины.
Скоординировав все эти исследования и опыт, нам нужно выяснить, как мы можем реализовать такие законы контроля, чтобы заставить систему работать. Эта более практичная сторона контроля составляет неотъемлемую часть контроля и серьезную часть нашего исследования.
Есть бесчисленное множество тем, предметов для изучения. Возможностей предостаточно. Общество систем управления IEEE стремится к совершенствованию таких технологий. Ждем вашего вызова.
Системы диспетчерского управления | Потребности в исследованиях человеческого фактора
Барон С., Захариас Г., Муралидхаран Р. и Ланкрафт Р. 1981 PROCRU: Модель для анализа процедур летного экипажа при заходе на посадку. В материалах восьмого Всемирного конгресса МФБ, Токио.
В материалах восьмого Всемирного конгресса МФБ, Токио.
Барон С. и Клейнман Д. 1969 Человек как оптимальный контроллер и процессор информации. IEEE Trans. Человеко-машинные системы MSS-10 (11): 9–17.
Бауэр, Г. 1981 Настроение и память. Американский психолог 36: 129–148.
Кавано, Дж. К., и Борковски, Дж. 1980 Поиск соединений между метапамятью и памятью. Психология развития 16: 441–453.
Чейз, У.Г., и Саймон, Х.А. 1973 Мысленный взгляд в шахматах.В издании W.G. Chase, Обработка визуальной информации . Нью-Йорк: Academic Press.
Чи, М.Т.Х., Чейз, В.Г., и Истман, Р. Пространственное представление водителей такси, 1980. Документ, представленный Обществу Психономики, Сент-Луис, ноябрь.
Коллис, А.М., Лофтус, Е.М. 1975 Распространяющаяся теория активации семантической обработки. Психологический обзор 82: 407–428.
Cowey, A. 1979 Корковые карты и визуальное восприятие. Ежеквартальный журнал экспериментальной психологии 31: 1–17.
Эрикссон А. и Саймон Х. 1980 Устные отчеты как данные. Психологический обзор 87: 215–251.
Фельдман Дж. А. и Баллард Д. Х. в коннекционистских моделях и их свойствах. В печати J.Beck and A.Rosenfeld, eds., Human and Computer Vision . Нью-Йорк: Academic Press.
Гольдберг, Л. 1968 Простые модели или простые процессы? Некоторые исследования клинических суждений. Американский психолог 23: 483–496.
Грин, Д.М., и Светс, Дж. А. 1966 Теория обнаружения сигналов и психофизика . Нью-Йорк: Джон Вили.
Харви, Дж. Х., Икес, У. Дж., И Кидд, Р. Ф., ред. 1976 Новые направления в исследованиях атрибуции . Хиллсдейл, штат Нью-Джерси: Лоуренс Эрлбаум.
Основы коммуникации и методологии управления
Как развивающаяся область исследований, сетевые системы управления демонстрируют возрастающее значение и привлекают все больше и больше внимания в последние годы. Интеграция управления и связи в сетевые системы управления сделала проектирование и анализ таких систем серьезным теоретическим вызовом для традиционной теории управления. Такая интеграция также делает внедрение сетевых систем управления необходимым промежуточным шагом на пути к окончательной конвергенции управления, связи и вычислений. Здесь мы вводим основы сетевых систем управления, а затем описываем современные исследования в этой области. Мы надеемся, что такое краткое руководство может быть полезным, чтобы вдохновить на дальнейшее развитие сетевых систем управления как в теории, так и в потенциальных приложениях.
Интеграция управления и связи в сетевые системы управления сделала проектирование и анализ таких систем серьезным теоретическим вызовом для традиционной теории управления. Такая интеграция также делает внедрение сетевых систем управления необходимым промежуточным шагом на пути к окончательной конвергенции управления, связи и вычислений. Здесь мы вводим основы сетевых систем управления, а затем описываем современные исследования в этой области. Мы надеемся, что такое краткое руководство может быть полезным, чтобы вдохновить на дальнейшее развитие сетевых систем управления как в теории, так и в потенциальных приложениях.
1. Введение
«Сетевые системы управления» (NCS) – это название общего класса систем управления, в которых «контур управления замыкается через сеть последовательной связи» [1]. Интерес к такой конфигурации системы возник еще в 1980-х годах, когда так называемые «интегрированные сети связи и управления» привлекли большое внимание управляющего сообщества [2]. С этого времени другие псевдонимы, такие как «Сетевые системы управления» и «Управление (через) сети», также использовались для описания аналогичной, если не такой же, конфигурации системы, как NCS, но сегодня они используются редко.
Как видно из названия, наиболее отличительной особенностью NCS является использование сетей связи в контуре управления [3, 4]. Ранее мы стали свидетелями использования ориентированных на управление коммуникационных сетей, таких как Control Area Network и DeviceNet, в качестве предпочтительных коммуникационных сетей в NCS; Быстрое развитие коммуникационных технологий, а также растущие потребности крупномасштабных систем сделали Интернет чрезвычайно привлекательной альтернативой.Интернет дает нам возможность построить большую систему управления с гораздо меньшими затратами и более простым обслуживанием, а также с более гибкой реконфигурацией. Основываясь на таких фундаментальных теоретических достижениях в области NCS, в последние годы мы стали свидетелями различных инноваций, таких как умный дом, умный транспорт, удаленная хирургия и Интернет вещей [5–8].
Однако преимущества NCS не бесплатны. Фундаментальной основой обычных систем управления является то, что обмен данными между компонентами управления осуществляется без потерь.В NCS данные должны передаваться через сеть связи, а природа Интернета и других разновидностей сетей передачи данных означает, что идеальный обмен данными между компонентами управления по существу недоступен. Таким образом, несовершенная трансляция данных в NCS вводит в систему управления так называемые ограничения связи, которые включают, например, задержку, вызванную сетью (задержки при передаче данных измерения и управления), выпадение пакета данных (данные пакет может отсутствовать во время передачи), и проблема синхронизации времени (разные компоненты управления могут работать на разных часах) [9].Эти ограничения связи могут значительно ухудшить производительность системы или даже дестабилизировать систему при определенных условиях, в то время как простые расширения традиционных подходов к управлению не могут быть получены непосредственно в сетевой среде управления [10–16]. Таким образом, эти трудности создают большие проблемы для управляющих и коммуникационных сообществ, и были проделаны значительные работы для лучшего понимания и проектирования таких систем на стыке теории управления и коммуникационных технологий [17–19].
Здесь мы предлагаем краткое руководство по NCS. Он состоит из двух частей. Сначала мы даем подробное представление о сетях связи в NCS, включая их основные характеристики и, что более важно, их взаимодействие с системой управления. Обратите внимание, что мы фокусируемся на сетях передачи данных, таких как Интернет, но не на сетях, ориентированных на управление, просто из-за все более широкого использования и более сложных коммуникационных функций первых. Затем мы рассматриваем современные исследования NCS, в основном с точки зрения управления, с акцентом на подходе кодового обозначения, который объединяет как управление, так и коммуникацию.Это руководство не обязательно является исчерпывающим или исчерпывающим. Скорее, наша главная цель – познакомить новых исследователей с основами NCS. Привлекая все больше и больше молодых исследователей в эту область, мы верим, что славное будущее, которое обещали NCS, очень скоро станет реальностью.
Скорее, наша главная цель – познакомить новых исследователей с основами NCS. Привлекая все больше и больше молодых исследователей в эту область, мы верим, что славное будущее, которое обещали NCS, очень скоро станет реальностью.
Для простоты в этом руководстве мы сосредоточимся на более простой структуре NCS. Фактически, с общей точки зрения системной структуры NCS могут содержать две разные структуры [20]: «прямую структуру» (рисунок 1) и «иерархическую структуру» (рисунок 2).Последний отличается от первого, поскольку присутствует локальный контроллер, а сеть связи используется для замыкания петли между главным контроллером и локальной системой. Это структурное различие может иметь как теоретическую, так и практическую ценность; последнее, однако, может рассматриваться как иерархическая комбинация прямой структурированной NCS и традиционной локальной системы управления, и поэтому нет абсолютной необходимости исследовать иерархическую структуру как совершенно новый тип NCS.Фактически, большинство доступных на сегодняшний день работ по NCS сосредоточено на прямой структуре, что также является основной темой этого краткого руководства.
2. Основы сетевых систем управления
В этом разделе представлены основы NCS, при этом акцент делается на различиях между NCS и обычными системами управления, то есть на отличительных и уникальных характеристиках NCS, которые подведены вставленной коммуникационной сетью.
2.1.Топология сети
При наличии сети связи в NCS обычные компоненты управления включают датчик, контроллер и исполнительный механизм, работающие как сетевые узлы с точки зрения топологии сети. С этой точки зрения необходимо решить две проблемы следующим образом.
2.1.1. Синхронизация по времени
Компоненты управления должны быть синхронизированы по времени для правильной работы. Это фундаментальная основа обычных систем управления, но обычно отсутствует в NCS из-за использования распределенных сетей связи [21]. При определенных условиях временная синхронизация в NCS может не быть необходимым условием, если задержка, вызванная сетью в обратном канале, не требуется для расчета сигналов управления и / или задержка, вызванная сетью в прямом канале, не требуется. для осуществления управляющих воздействий. В некоторых других случаях, как обсуждалось в [22, 23], временная синхронизация вместе с использованием временных меток в NCS может предложить преимущество по сравнению с традиционными системами временной задержки, поскольку задержка обратного канала известна контроллеру, а задержка прямого канала (также и задержка в оба конца) известна приводу.Это преимущество затем может быть использовано для получения лучшей структуры управления для NCS, как это сделано в [22, 24].
При определенных условиях временная синхронизация в NCS может не быть необходимым условием, если задержка, вызванная сетью в обратном канале, не требуется для расчета сигналов управления и / или задержка, вызванная сетью в прямом канале, не требуется. для осуществления управляющих воздействий. В некоторых других случаях, как обсуждалось в [22, 23], временная синхронизация вместе с использованием временных меток в NCS может предложить преимущество по сравнению с традиционными системами временной задержки, поскольку задержка обратного канала известна контроллеру, а задержка прямого канала (также и задержка в оба конца) известна приводу.Это преимущество затем может быть использовано для получения лучшей структуры управления для NCS, как это сделано в [22, 24].
2.1.2. Приводной механизм
Датчик и исполнительный механизм могут приводиться в действие либо по времени, либо по событию. Разница между двумя приводными механизмами заключается в методе срабатывания триггера, который запускает компоненты управления. Для механизма, управляемого временем, компоненты управления запускаются для работы через равные промежутки времени, в то время как для механизма, управляемого событиями, компоненты управления запускаются только предопределенными «событиями».«В широком смысле, механизм, управляемый временем, можно рассматривать как частный случай механизма, управляемого событиями, когда в качестве триггерных событий для последнего выбирается время. Поэтому неудивительно, почему механизмы, управляемые событиями, более сложны и для работы могут потребоваться вспомогательные устройства.
Датчик обычно управляется временем, в то время как контроллер и исполнительный механизм могут управляться либо по времени, либо по событию. Для получения дополнительной информации о приводном механизме для компонентов управления читатель может обратиться к [25] и ссылкам в нем.Тем не менее, стоит упомянуть, что с разными приводными механизмами получаются разные модели системы для NCS, и управляемые событиями компоненты управления обычно приводят к лучшей производительности системы.
2.2. Пакетная передача данных
Данные в NCS кодируются в пакетах данных и затем передаются по сети связи. Типичный пакет данных показан на рисунке 3. Пакетная передача – одна из наиболее важных характеристик NCS, которая отличает ее от обычных систем управления [26–28].Эта характеристика может означать, что идеальная передача данных, как предполагается в обычных системах управления, отсутствует в NCS, что представляет собой наиболее сложный аспект в NCS. Ограничения связи, вызванные пакетной передачей в NCS, включают вызванную сетью задержку, выпадение пакетов данных и беспорядок пакетов данных, которые подробно описаны ниже.
2.2.1. Задержка, вызванная сетью
Время передачи пакетов данных приводит к задержкам, вызванным сетью, для NCS, которые, как хорошо известно, ухудшают производительность систем управления.
Существует два типа задержек, вызванных сетью, в зависимости от того, где они возникают. (I) это задержка, вызванная сетью от датчика до контроллера, то есть задержка обратного канала. (Ii) задержка, вызванная сетью от контроллера. к приводу, то есть задержка в прямом канале.
Два типа сетевых задержек могут иметь разные характеристики [29]. Однако в большинстве случаев эти задержки не рассматриваются отдельно, и интерес представляет только задержка приема-передачи [4, 30–32].
В зависимости от типов сетей связи, используемых в NCS, характеристики задержки, вызванной сетью, меняются следующим образом [20, 33, 34].(i) Циклические сервисные сети (например, Toking-Ring и Toking-Bus) представляют собой ограниченные задержки, которые можно рассматривать как постоянные в большинстве случаев. (ii) Сети с произвольным доступом (например, Ethernet и CAN) представляют собой случайные и неограниченные задержки. ( iii) Сети приоритетного порядка (например, DeviceNet) представляют собой ограниченные задержки для пакетов данных с более высоким приоритетом и неограниченные задержки для пакетов с более низким приоритетом.
Задержка, вызванная сетью, является одной из наиболее важных характеристик NCS, которая до сих пор широко рассматривалась в литературе; см., например, [4, 30, 32, 35–48].
2.2.2. Выпадение пакета данных
Ошибка передачи данных в сетях связи неизбежна, что в случае NCS затем приводит к ситуации, называемой «выпадением пакета данных». Выпадение пакета данных может происходить либо в обратном, либо в прямом канале, и это делает либо данные считывания, либо управляющие сигналы недоступными для NCS, что значительно снижает производительность NCS.
В сетях связи при потере пакета данных применяются две разные стратегии, то есть либо повторно отправить пакет, либо просто отбросить его.Используя термины из сетей связи, эти две стратегии называются протоколом управления передачей (TCP) и протоколом пользовательских дейтаграмм (UDP) соответственно [21]. Легко видеть, что с TCP все пакеты данных будут приняты успешно, хотя для некоторых пакетов данных может потребоваться значительное время, тогда как с UDP некоторые пакеты данных будут потеряны навсегда.
Что касается NCS, UDP используется в большинстве приложений из-за требований реального времени и надежности систем управления.В результате необходимо явно учитывать влияние выпадения пакетов данных в NCS, как это сделано, например, в [49–54].
2.2.3. Нарушение порядка пакетов данных
В большинстве сетей связи разные пакеты данных страдают разными задержками, что затем приводит к ситуации, когда пакет данных, отправленный ранее, может прибыть в пункт назначения позже или наоборот; см. рисунок 4. Это явление называется беспорядком пакетов данных. Наличие беспорядка пакетов данных может означать, что вновь поступивший управляющий сигнал в NCS может быть не самым последним, чего никогда не бывает в обычных системах управления.Эффективность управления неизбежно ухудшится, если алгоритм управления не будет явно учитывать неупорядоченные данные. Были выполнены некоторые предварительные работы, обычно с использованием схемы активной компенсации [55–57].
2.2.4. Одиночный и многопакетный
Когда данные зондирования и управляющие сигналы отправляются через пакеты данных сети, возникает другая ситуация: в случае, когда, например, несколько датчиков используются и географически распределены в NCS, и, таким образом, они отправляют свои данные зондирования. отдельно от контроллера по сети, контроллеру, возможно, придется ждать прибытия всех пакетов данных зондирования, прежде чем он сможет вычислить действия управления, и если только один пакет данных зондирования потерян, все остальные пакеты данных зондирования будут подлежат исключению из-за неполноты.Мы называем эту ситуацию «многопакетной» передачей данных в NCS.
Другая ситуация в NCS – это когда данные считывания или управляющие сигналы нескольких шагов отправляются через один пакет данных по сети, поскольку размер пакета, используемый в NCS, может быть очень большим по сравнению с размером данных, необходимым для кодирования одного шаг считывания данных или управляющего сигнала. Эта «одиночная пакетная» передача данных в NCS является фундаментальной основой так называемого подхода к управлению на основе пакетов [24].
2.3. Ограниченные сетевые ресурсы
Ограничение сетевых ресурсов в NCS в первую очередь вызвано ограниченной полосой пропускания сети связи, что приводит к следующим трем ситуациям в NCS, которые отличаются от обычных систем управления.
2.3.1. Период выборки, сетевые нагрузки и производительность системы
NCS представляют собой особый класс систем выборочных данных из-за цифровой передачи данных в сетях связи. Однако в NCS ограниченная полоса пропускания сети создает ситуацию, когда меньший период выборки не может привести к лучшей производительности системы, что обычно верно для систем выборки данных [58].
Эта ситуация возникает из-за того, что при слишком малом периоде выборки будет произведено слишком много данных зондирования, что приведет к перегрузке сети и возникновению перегрузки, что приведет к большему количеству выпадений пакетов данных и более длительным задержкам, а затем ухудшению производительности системы. Взаимосвязь между периодом выборки, сетевой нагрузкой и производительностью системы в NCS проиллюстрирована на рисунке 5. Например, когда период выборки уменьшается от значения, соответствующего точкам «a» до «b», производительность системы улучшается по мере того, как в обычных системах выборочных данных, поскольку перегрузка сети не возникает до точки «b»; однако производительность системы, вероятно, ухудшится из-за перегрузки сети, когда период выборки становится еще меньше от значения, соответствующего точкам от «b» до «c».Таким образом, взаимосвязь, показанная на рисунке 5, подразумевает, что существует компромисс между периодом выборки заводских данных и производительностью системы в NCS; то есть в NCS существует оптимальный период выборки, который обеспечивает наилучшую производительность системы (точка «b» на рисунке 5).
Взаимосвязь между периодом выборки, сетевой нагрузкой и производительностью системы в NCS проиллюстрирована на рисунке 5. Например, когда период выборки уменьшается от значения, соответствующего точкам «a» до «b», производительность системы улучшается по мере того, как в обычных системах выборочных данных, поскольку перегрузка сети не возникает до точки «b»; однако производительность системы, вероятно, ухудшится из-за перегрузки сети, когда период выборки становится еще меньше от значения, соответствующего точкам от «b» до «c».Таким образом, взаимосвязь, показанная на рисунке 5, подразумевает, что существует компромисс между периодом выборки заводских данных и производительностью системы в NCS; то есть в NCS существует оптимальный период выборки, который обеспечивает наилучшую производительность системы (точка «b» на рисунке 5).
2.3.2. Квантование
Из-за использования сетей передачи данных с ограниченной полосой пропускания квантование сигнала в NCS неизбежно, что оказывает значительное влияние на производительность системы.Между тем квантование также является потенциальным методом уменьшения использования полосы пропускания, что позволяет ему быть эффективным инструментом для предотвращения перегрузки сети в NCS и, таким образом, повышения производительности системы NCS. Для получения дополнительной информации об эффектах квантования в NCS читатель может найти [59–64] и ссылки в них.
2.3.3. Ограничение доступа к сети и планирование
Как показано на рисунке 3, NCS может использовать только часть полезной нагрузки и совместно использовать пакет данных с другими приложениями.В частности, на рисунке 6 другие приложения также могут быть NCS, что означает, что несколько NCS совместно используют одну и ту же сеть связи. В таком случае ограниченная полоса пропускания сети означает, что подсистемы не могут постоянно получать доступ к сетевым ресурсам из-за конкуренции за ресурсы. Следовательно, необходим алгоритм планирования, чтобы составить график того, когда и как долго конкретная подсистема может занимать сетевой ресурс. В то же время, при удовлетворительном ограничении производительности управления, чем меньше пропускная способность NCS, тем лучше она работает с другими приложениями.
В то же время, при удовлетворительном ограничении производительности управления, чем меньше пропускная способность NCS, тем лучше она работает с другими приложениями.
3. Исследование сетевых систем управления
В этом разделе мы кратко рассмотрим современные исследования NCS. Он состоит из двух частей, разделенных на категории в соответствии с методологиями, использованными в этом исследовании; то есть в первой категории преобладает использование теории управления, в то время как во второй категории используется стратегия кодового обозначения, объединяющая управление и коммуникацию вместе.
3.1. Исследования NCS, ориентированные на управление
После возобновления интереса к NCS [1] исследования NCS в основном проводились в сообществе теории управления [20].
Сообщество теории управления занимается теоретическим анализом характеристик управления NCS, где сеть в NCS моделируется с помощью заранее определенных параметров для системы управления. В этом типе исследования коммуникационные характеристики NCS, например, задержка, вызванная сетью, могут быть сформулированы и включены в систему как некоторые параметры, тем самым давая обычную систему управления для дальнейшего анализа и проектирования. Этот тип исследования упрощает моделирование и анализ NCS, позволяя легко применять все существующие методы контроля к NCS.Следовательно, такая исследовательская стратегия доминирует в исследовательской области в течение значительного периода времени [20, 65].
Поскольку предполагается, что характеристики связи заданы параметрами, при проектировании NCS возникает большая консервативность. Большинство работ может быть сосредоточено только на расширении существующих подходов к управлению для NCS без полного использования коммуникационных характеристик NCS. Затем игнорируется возможность оптимизации производительности системы за счет эффективного использования характеристик сети [66–69].
Ниже приводится краткий обзор традиционных подходов к управлению и теорий, которые были применены к NCS.
(i) Системы с выдержкой времени . Что касается задержки, вызванной сетью, естественно моделировать NCS как особый класс систем с временной задержкой. Этот метод исследования охватывает широкий спектр исследований NCS; см., например, [39, 41, 70–77] и обзор в [4, 20, 78].
Интересным вопросом здесь является определение максимально допустимой границы задержки (MADB) NCS, которая является верхней границей интервала передачи, которая обеспечивает стабильность или другие показатели производительности NCS [79].Определение MADB важно в теории, а также может играть руководящую роль в практических приложениях. Дополнительную информацию по этому вопросу можно найти в обзорной статье [36].
(ii) Стохастический контроль . Как упоминалось выше, ограничения связи в NCS имеют стохастический характер, что позволяет применять традиционные подходы стохастического управления к NCS. Ранние исследования можно найти в [29], где были явно сформулированы характеристики сетевой задержки и получены предварительные критерии стохастической устойчивости NCS; [35] расширили работу [2] на структуру стохастического оптимального управления и предоставили стохастические оптимальные контроллеры с обратной связью по состоянию и с обратной связью по выходу соответственно; в [42] на основе системы марковских скачков получены достаточные и необходимые условия стохастической устойчивости НКС.За дополнительной информацией читатель отсылается к обзору в [9].
(iii) Оптимальный контроль . Как очень успешная идея как в теории, так и в практических приложениях, оптимальное управление также нашло свое место в NCS. Несомненно, традиционные подходы к оптимальному управлению можно использовать в сетевой среде управления для разработки контроллера для NCS; см., например, [48, 50, 51, 80–82]; и, как особый класс подходов к оптимальному управлению, управление с прогнозированием модели (MPC или управление удаляющимся горизонтом (RHC)) кажется более подходящим для сетевой среды управления, и «основным расширением, необходимым для применения управления с прогнозированием модели в сетевых средах, было бы распределенное решение основной задачи оптимизации »[27]. Примеры применения MPC к NCS можно увидеть, например, в [23, 44, 83–86].
Примеры применения MPC к NCS можно увидеть, например, в [23, 44, 83–86].
(iv) Теория коммутируемых систем . Еще одним важным инструментом в исследовании NCS является теория коммутируемых систем, которая обычно используется для моделирования различных состояний сети в NCS как различных режимов системы. Этот подход может легко справиться с задержкой, вызванной сетью, а также с выпадением пакетов данных в NCS, и ограничение подхода вызвано в основном тем, насколько хорошо мы понимаем свойства изменений сетевых условий, что, как правило, сложно.С исследованиями в этой области читатель может обратиться к [72, 75, 87–93] и ссылкам в них.
3.2. Разработка кода для NCS
Как было указано ранее, именно коммуникационная сеть заменяет прямые соединения между компонентами управления в традиционных системах управления, что отличает NCS. Таким образом, так называемый подход с кодовым обозначением к NCS, подход, объединяющий как управление, так и коммуникацию, стал новой тенденцией в последние годы. Ограничения связи больше не считаются заранее определенными параметрами, а действуют как планируемые факторы, и при эффективном использовании этих факторов можно ожидать лучшей производительности [23, 26, 67, 68, 85, 94–97].Мы приводим два примера кодового подхода к NCS.
(i) Подход к управлению на основе пакетов . Как обсуждалось в разделе 2.2, пакетная передача – одна из наиболее отличительных характеристик NCS. Эту характеристику можно использовать для получения структуры управления кодовым обозначением для NCS, называемой структурой управления на основе пакетов, как это сделано в [23, 24, 98–100]. Подход к управлению на основе пакетов берет свое начало в [44, 97], где с использованием обобщенного метода управления с предсказанием эффективно использовалась пакетная структура передачи данных для активной компенсации коммуникационных ограничений в NCS.
(ii) Кодекс управления и планирования . В NCS может возникнуть ситуация, когда несколько компонентов управления совместно используют сеть с ограниченной полосой пропускания. В такой ситуации необходимо планирование сетевых ресурсов среди компонентов управления; см. раздел 2.3.3. Что касается алгоритмов планирования, [1] предложил алгоритм динамического планирования, называемый «попытка-один раз-сброс» (TOD), который распределяет сетевые ресурсы таким образом, чтобы узел с наибольшей ошибкой за последний отчетный период имел доступ к сетевому ресурсу.В [101] предложен протокол Ляпунова равномерно глобально асимптотически стабильный (UGAS), основанный на TOD, который дополнительно улучшен в [102]. В [103] авторы использовали технику «коммуникационной последовательности» (см. Также [104]), чтобы справиться с ограничением доступа к сети для такой конфигурации системы и смоделировали подсистемы как коммутируемые системы с двумя режимами «разомкнутый контур» и « замкнутый цикл », которые переключаются в зависимости от того, имеет ли текущая подсистема доступ к среде или нет. В [105] авторы рассмотрели частный случай конфигурации, показанной на рисунке 6, где канал от контроллера к исполнительному механизму связан напрямую, а алгоритм монотонного планирования скорости применяется для планирования передачи данных зондирования подсистем.
В такой ситуации необходимо планирование сетевых ресурсов среди компонентов управления; см. раздел 2.3.3. Что касается алгоритмов планирования, [1] предложил алгоритм динамического планирования, называемый «попытка-один раз-сброс» (TOD), который распределяет сетевые ресурсы таким образом, чтобы узел с наибольшей ошибкой за последний отчетный период имел доступ к сетевому ресурсу.В [101] предложен протокол Ляпунова равномерно глобально асимптотически стабильный (UGAS), основанный на TOD, который дополнительно улучшен в [102]. В [103] авторы использовали технику «коммуникационной последовательности» (см. Также [104]), чтобы справиться с ограничением доступа к сети для такой конфигурации системы и смоделировали подсистемы как коммутируемые системы с двумя режимами «разомкнутый контур» и « замкнутый цикл », которые переключаются в зависимости от того, имеет ли текущая подсистема доступ к среде или нет. В [105] авторы рассмотрели частный случай конфигурации, показанной на рисунке 6, где канал от контроллера к исполнительному механизму связан напрямую, а алгоритм монотонного планирования скорости применяется для планирования передачи данных зондирования подсистем.
4. Выводы
Несмотря на все достижения, которые были достигнуты для сетевых систем управления за последние десятилетия, в будущем все еще необходимо приложить дополнительные усилия. В большинстве этих текущих исследований используется методология кодового обозначения, и желательно сотрудничество между управляющими и коммуникационными сообществами, а также вычислительными сообществами.
Это сотрудничество затем откроет ценность сетевых систем управления в более широких перспективах, изучив их тесную взаимосвязь с другими системами, такими как Интернет вещей, киберфизические системы и многоагентные системы.Все это вместе дает нам многообещающее будущее сетевой интеллектуальной автоматизации.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа была частично поддержана Национальным фондом естественных наук Китая в рамках грантов 61304048, 61174058 и 61473024, Австралийским исследовательским советом в рамках гранта DP140102180 и гранта LP140100471, а также проектом 111 в рамках гранта B12018.
Системы управления, соответствующие вашему стилю управления
Система контроля не «контролирует» деятельность организации, но – при правильном использовании – это важный инструмент в наборе менеджера, позволяющий увеличить объем эффективного контроля, который он осуществляет. Контроль является центральным аспектом работы менеджера, и у него есть ряд стратегий, из которых он может выбирать. Критически важным решением для него является выбор стратегии, соответствующей его конкретной ситуации и стилю управления.Очевидно, что чем лучше сочетаются стратегия и стиль, тем лучше организация. В этой статье авторы сообщают о результатах своих недавних исследований в этой области и предоставляют полезное напоминание о том, что менеджеры так часто делают неправильно и как это исправить.
Не так давно бойскауты Америки раскрыли, что данные о членстве, поступающие с мест, были сфальсифицированы. В ответ на давление национального стремления к членству люди в организации сильно завысили количество новых бойскаутов.К своему огорчению, руководители обнаружили то, что открыли и другие менеджеры: системы организационного контроля часто приводят к непредвиденным последствиям. Стремление к увеличению членства побудило людей увеличить количество зарегистрированных новых членов, но не побудило их увеличивать количество фактически зачисленных бойскаутов.
Случай с бойскаутами является ярким примером широко распространенной проблемы. Организации тратят большие суммы денег, времени и усилий на разработку и поддержку систем управления.Эти системы призваны повысить способность организации координировать действия своих членов и выявлять проблемы по мере их возникновения.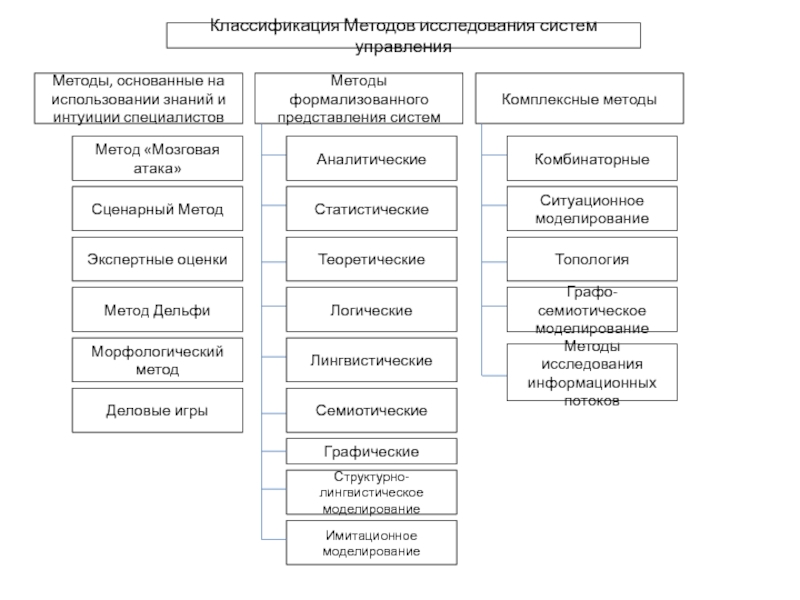 Однако часто вместо усиления организационного контроля эти системы сокращают объем эффективного контроля, осуществляемого организацией.
Однако часто вместо усиления организационного контроля эти системы сокращают объем эффективного контроля, осуществляемого организацией.
Почему это происходит? Наши исследования и исследования других показывают, что проблема часто заключается в том, как менеджеры используют системы контроля. 1 Большинство систем контроля, включая системы бюджетной, управленческой информации и финансового учета, по сути, являются измерениями.Они регулярно собирают информацию о конкретных аспектах деятельности организации.
Сами системы не могут напрямую контролировать деятельность организации. Скорее, они предоставляют информацию менеджерам, которые могут осуществлять контроль. Если менеджеры хорошо используют информацию, система контроля работает. При неправильном использовании система может дать непредвиденный эффект.
Примечательно, что организации редко вкладывают много усилий в обучение менеджеров использованию систем контроля.Вместо этого большинство тратят много времени на проектирование, конструирование, доработку и улучшение технических аспектов своих систем. В результате, хотя системы организационного контроля постоянно становятся все более точными, точными и технологически сложными, два вопроса часто упускаются из виду:
1. Насколько эффективна система (и способ ее использования) в выполнении того, что она должна делать?
2. Как можно лучше использовать систему?
Недавние исследования, проведенные рядом организаций, дали некоторые ответы на эти вопросы. 2 Во-первых, системы контроля влияют на то, как члены организации направляют свою энергию на работу; члены с большей вероятностью будут тратить время и силы на те области, которые охватываются системами. Во-вторых, то, как участники реагируют на системы контроля, во многом зависит от того, как менеджеры используют системы. В-третьих, разные менеджеры разрабатывают разные стратегии использования систем контроля. Наконец, у каждой стратегии есть определенные недостатки и преимущества.
Только когда менеджеры понимают (а) как эти системы влияют на поведение их подчиненных и (б) какие компромиссы возникают в каждой стратегии контроля, они могут научиться эффективно использовать системы контроля организации.
В завершение этой статьи мы обсудим, что менеджеры должны учитывать при выборе стиля управления. Мы рассмотрим различные способы, которыми системы управления влияют на управленческое поведение. Затем мы обсудим две основные стратегии использования систем управления, различные вопросы, которые следует учитывать при выборе конкретного стиля управления, и последствия окончательного решения.
Влияние на подчиненных
Когда область охвачена системой контроля, члены организации концентрируются на улучшении своих показателей в измеряемой области.Это направление энергии обусловлено тремя причинами:
1. Измерение области деятельности показывает, что высшее руководство считает эту область важной и заслуживает внимания.
2. Руководители обычно используют меры системы контроля, когда они оценивают работу подчиненных. Поскольку подчиненный обычно чувствует, что оценка руководителя влияет на его или ее вознаграждение, подчиненный имеет тенденцию вкладывать энергию в измеряемые области.
3. Член организации может легко увидеть изменения в показателях эффективности, которые являются частью системы контроля.Если его показатели улучшаются, это может быть источником личного удовлетворения.
Приложение I представляет собой пример того, как измерение эффективности направляет подчиненную энергию. В двух разных организациях – одной из коммунальных предприятий северо-востока, другой – банка Среднего Запада – сотрудников попросили указать, в какой степени оценивались различные области деятельности. В другой момент их спросили, сколько времени и усилий они вкладывают в каждую область. Как показано на выставке, общая закономерность заключается в том, что чем больше людей воспринимают измеряемую площадь, тем больше времени и усилий они вкладывают в это.
Приложение I Измерение площади и усилия двух организаций
Действие систем управления
Похоже, что системы управления определяют, сколько энергии подчиненные вкладывают в область, но как эта энергия используется? С одной стороны, подчиненные могут быть заинтересованы в повышении эффективности своей работы, увеличении объемов работ или повышении качества работы.
С другой стороны, измерение может дать результаты, которые мы видели в примере с бойскаутами.Подчиненные направляют свои усилия на «игру», чтобы «обыграть систему». Вместо того, чтобы работать хорошо, сотрудники часто ставят низкие цели, которые могут быть легко достигнуты, манипулируют мерами, чтобы добиться желаемых результатов, и фактически саботируют информационную базу системы.
Например, крупная государственная организация потребовала, чтобы каждый человек заполнял форму, в которой отражал то, как он проводил свое время в 20-минутных блоках. Цель состояла в том, чтобы мотивировать сотрудников управлять своим временем и генерировать достоверную информацию о том, сколько времени они уделяют различным задачам.Однако результат был совершенно другим. Сотрудники видели в системе попытку упорядочить свою жизнь и деятельность.
Таким образом, табели учета рабочего времени превратились не в полезный инструмент, а в развлекательную деятельность. В пятницу после обеда во время перерыва в работе сотрудники собирались вместе, чтобы заполнить свои табели учета рабочего времени, каждый из которых соревновался, чтобы увидеть, кто сможет составить самый нелепый отчет о деятельности. Излишне говорить, что эти записи не имели никакого отношения к фактически проделанной работе. Система не мотивировала людей повышать производительность; это побудило их играть в игры с системой.
Приложение II суммирует эффекты систем управления. Наличие мер в области влияет на поведение подчиненных, но измерение – не единственный фактор. Меры должны восприниматься сотрудниками как достаточно точные, и руководители должны умело ими пользоваться.
Приложение II Как системы управления и их использование влияют на поведение
Стратегии контроля
Менеджер должен серьезно подумать о применении мер системы контроля в какой-либо одной области.Он должен рассматривать последствия своих действий с точки зрения типов поведения, которые он мотивирует в своих подчиненных. Хотя существует целый ряд стратегий контроля, два основных подхода – внешний контроль и внутренняя мотивация – кажутся наиболее полезными для многих менеджеров. Таблица III показывает, что каждая из этих стратегий требует различного поведения со стороны менеджера, каждая из которых может иметь как желательные, так и нежелательные эффекты на поведение подчиненных.
Приложение III Две разные стратегии контроля
Внешнее управление
Эта стратегия основана на предположении, что подчиненные в конкретной ситуации мотивированы в первую очередь внешним вознаграждением и должны контролироваться их руководителями.Чтобы эффективно использовать систему управления таким образом, требуется три шага.
Во-первых, цели и стандарты, связанные с системой, должны быть относительно сложными, чтобы «растянуть» подчиненных и оставить мало места для безделья.
Во-вторых, меры площади должны быть построены так, чтобы они были «доказательствами людей», чтобы люди не могли манипулировать мерами.
В-третьих, вознаграждение должно быть напрямую и открыто связано с производительностью, как это указано в системе контроля, чтобы гарантировать, что у подчиненных есть стимул усердно трудиться.
Примером подхода внешнего контроля может быть оценка менеджера исключительно на основе результатов деятельности его центра прибыли, с относительно высокими уровнями прибыли, заложенными в бюджет, и с его вознаграждением, главным образом и непосредственно связанным с количеством долларов прибыли.
Эта стратегия внешнего управления может иметь различные эффекты. С одной стороны, подчиненные могут направить много энергии в измеряемые области и могут изо всех сил пытаться заставить свои меры сдвинуться с мертвой точки, поскольку за это они могут получить вознаграждение.Там, где система очень жестко структурирована, результатом будет высокая степень контроля подчиненного поведения. С другой стороны, может произойти несколько нежелательных результатов.
Во-первых, такая стратегия может побудить членов организации улучшить свои показатели эффективности, но не создать каких-либо обязательств в отношении того, чтобы они лучше выполняли свою работу. Подчиненные начнут формировать отношение к работе, при котором «хорошо» означает, что они хорошо справляются с показателями производительности, не обязательно более эффективно выполнять свою работу.В результате, если они смогут повысить свою «производительность», манипулируя мерами, предоставляя ложную информацию, намеренно устанавливая низкие цели и стандарты или саботируя систему, можно ожидать, что члены организации сделают это.
Во-вторых, такая стратегия может привести к неверно направленным усилиям. Подчиненные могут вложить всю свою энергию в конкретное поведение, которое измеряется, забывая при этом другое поведение, которое, хотя и не измеряется, также имеет жизненно важное значение. Например, если все усилия направлены на увеличение объема продаж, количество усилий, затрачиваемых на постоянное обслуживание клиентов, может быть уменьшено.В этом случае результатом является кратковременная максимизация измеряемой площади с возможным негативным долгосрочным воздействием на неизмеряемые площади.
В-третьих, такая стратегия может уменьшить поток достоверной информации, особенно негативной. Если людей напрямую вознаграждают за позитивное движение мер, они могут стать мотивированными для утаивания информации, которая отрицает значение этих мер, и утаивания негативной информации от руководителей более высокого уровня, которым она нужна для принятия решений.
Наконец, такая стратегия может вызвать излишнюю осторожность, направив энергию на оправдание всех действий. Подчиненные могут быть заинтересованы в том, чтобы меры либо продолжали выглядеть хорошо (не принимая на себя никаких рисков), либо собирать файлы «на всякий случай», заполненные информацией, оправдывающей снижение измеряемой эффективности. В любом случае энергия направляется на то, чтобы справиться с системой, а не на более широкую цель – сделать организацию более эффективной.
Внутренняя мотивация
В этой стратегии руководство предполагает, что подчиненных можно мотивировать, выстраивая их приверженность целям организации и вовлекая их в выполнение необходимых задач.Они предполагают, что сотрудников будут мотивировать чувства выполненного долга, достижений, признания и самоуважения, которые возникают в результате хорошего выполнения работы. Стратегия внутренней мотивации реализуется с помощью системы управления совершенно иным образом, чем в стратегии внешнего контроля.
Во-первых, несмотря на то, что цели установлены, наиболее важной особенностью этого подхода является не сложность их достижения, а тот факт, что они устанавливаются при участии. Тем людям, которые несут ответственность за достижение целей, дается определенное влияние на характер этих целей.
Во-вторых, меры используются для совместного выявления и решения проблемы, а не для наказания или порицания. Когда представление начинает двигаться в нежелательном направлении, не время катать головы. Настало время для руководителей и подчиненных собраться вместе (а) для определения причин изменения и (б) для выработки решений возникших проблем. Таким образом, система берет на себя функцию «раннего предупреждения», выявляя проблемы, начиная процесс их разрешения до того, как эти проблемы достигнут кризисного состояния.
Наконец, хотя награды привязаны к результатам, они не привязаны к одному или двум конкретным показателям. Скорее, структура вознаграждения подчеркивает ответственность за всю работу, только часть которой может быть представлена мерами. В целом система управления становится проблемной и ориентированной на будущее. Система помогает руководителю осуществлять контроль над подчиненным поведением, направляя усилия в будущем, а не наказывая за прошлые действия каждого человека.
Эта стратегия внутренней мотивации может иметь разные эффекты.Это может вызвать высокую приверженность целям, потому что член организации участвует в их постановке и чувствует ответственность за то, чтобы они были достигнуты. Это может привести к увеличению энергии, направляемой на выполнение задачи. По мере того, как производительность увеличивается, и когда человек отслеживает свой прогресс с помощью мер системы контроля, стратегия может также повысить удовлетворенность сотрудника от хорошего выполнения своей работы.
Таким образом, открытый характер системы контроля и ее общая, а не конкретная подотчетность означают, что у подчиненных мало стимулов играть в игры или вести себя дисфункционально.Что еще более важно, он поощряет и вознаграждает поток достоверной информации, особенно негативной.
В то же время такая стратегия может иметь некоторые нежелательные эффекты. Сравнительно свободный характер этого подхода означает, что у менеджера будет меньше контроля над поведением своих подчиненных. Поскольку менеджер отказывается от полного контроля над конкретными целями, подчиненные могут ставить менее амбициозные цели.
Кроме того, поскольку информация, предоставляемая системой управления, предназначена для решения проблем, а не для оценки, становится трудно использовать ее в качестве основы для вознаграждения.Таким образом, менеджер должен пожертвовать частью ценности, присущей подходу внешнего контроля, чтобы создать внутреннюю мотивацию со стороны подчиненных.
Наконец, некоторые люди могут не реагировать на процесс участия из-за различий в стиле работы или личности. Таким образом, эти люди не будут заинтересованы в успешной работе в рамках данной стратегии.
Стратегии выбора
Ни одна из двух только что рассмотренных стратегий не обязательно является «правильной» стратегией для использования во всех случаях.Поскольку у каждого из них есть определенные недостатки и преимущества, менеджер должен осознанно и тщательно выбирать подход, соответствующий его конкретной ситуации. Делая этот выбор, ему необходимо рассмотреть следующие четыре вопроса:
1. Согласованность между выбором стратегии и стилем управления.
При выборе стратегии контроля менеджеру, возможно, придется изменить свой стиль или стратегию, чтобы его общий подход к управлению был последовательным. Например, если руководитель обычно принимает все важные решения без привлечения подчиненных, для него было бы ошибкой использовать подход внутренней мотивации.Подчиненные привыкли следовать за менеджером. Они могут быть неспособны самостоятельно ставить реалистичные цели; или, что еще хуже, они могут использовать свое влияние для постановки простых целей, которых, как они знают, они могут достичь. Подход внутренней мотивации к организационному контролю, вероятно, будет эффективным только в контексте обычно основанных на широком участии отношений между менеджером и подчиненным.
2. Организационный климат, структура и система вознаграждения.
Стратегия контроля, чтобы быть наиболее эффективной, должна согласовываться с другими факторами в организации, которые определяют поведение сотрудников.Например, жесткая система контроля в организации, которая обычно предоставляет сотрудникам большую свободу действий и свободу действий, вскоре столкнется с проблемами.
3. Надежность показателей эффективности работы.
В некоторых случаях показатели системы контроля точно отражают производительность труда. В других случаях меры неадекватно показывают, насколько хорошо выполняется работа. Когда система контроля является ненадежным показателем эффективности, трудно реализовать стратегию жесткого внешнего контроля, поскольку использование неточных или ненадежных мер в качестве основы для оценки и вознаграждения может иметь катастрофические последствия.В таких условиях требуется более свободная и более внутренне ориентированная стратегия организационного контроля.
4. Индивидуальные различия между подчиненными.
Поскольку люди мотивированы разными потребностями, они могут по-разному реагировать на одну и ту же организационную структуру. Выбор стратегии контроля предполагает, что менеджер кое-что знает о характере людей, которые на него работают. Лица, приверженные самой работе (например, во многих профессиональных профессиях), вероятно, будут менее восприимчивы к стратегии внешнего контроля, чем те, чьей основной мотивацией является финансовое вознаграждение или продвижение по службе.
Менеджер также должен учитывать, насколько сотрудники хотят участвовать в принятии решений. Некоторые люди могут хорошо отреагировать на возможность участия, в то время как другие могут не захотеть принимать более активное участие или брать на себя ответственность. Таким образом, типы людей, которые работают на менеджера, должны быть фактором, влияющим на его выбор стратегии управления.
Осознанный выбор
На первый взгляд может показаться, что у менеджера слишком много факторов, которыми нужно манипулировать, чтобы сделать эффективный выбор.Один из способов решения этой проблемы состоит в том, чтобы менеджер последовательно выкладывал ключевые решения и точки выбора.
Во-первых, менеджер должен задать себе ряд вопросов (см. Приложение IV). Какой стиль управления он обычно использует? В какой он организации? Насколько точны и надежны его важные показатели эффективности? Наконец, насколько его подчиненные хотят участвовать в принятии решений?
Приложение IV. Вопросы, которые менеджер должен задать себе при выборе стратегии контроля
Во-вторых, менеджер должен систематически оценивать свои ответы, чтобы определить наиболее подходящую стратегию.Один из способов сделать это – использовать подход на основе дерева решений (см. Приложение V). Как показано на выставке, разные комбинации ответов на ключевые вопросы приводят менеджера к разным рекомендованным стратегиям с разными проблемами, касающимися их реализации.
Приложение V Дерево решений для выбора стратегии управления
В дополнение к шагам принятия решения, описанным в Приложении V, менеджеру также необходимо рассмотреть компромиссы между различными стратегиями, которые могут применяться в его конкретной ситуации.Очевидно, он должен взвесить желательные или нежелательные эффекты (как указано в Приложении III), которые система контроля может оказать на его конкретную группу подчиненных.
Например, если возможности для игры немногочисленны, а затраты компании, ведущей игру, низки, стратегия внешнего управления может быть более осуществимой. Однако в большинстве организаций потенциальные затраты на проведение игр высоки. Таким образом, менеджеры должны серьезно рассмотреть стратегию внутренней мотивации, особенно если основной процесс принятия решений показывает, что подчиненное участие возможно.
Система контроля и способ ее использования представляют собой потенциально мощный инструмент для воздействия на поведение людей в организациях. Подобно тому, как менеджеру необходимо делать осторожный и осознанный выбор среди стратегий контроля, организация должна осознавать альтернативные подходы к разработке и использованию систем контроля. Осознание потенциального воздействия систем контроля и огромной важности процесса контроля – в отличие от технологии контроля – имеет ключевое значение для повышения продуктивности и эффективности организации и ее сотрудников.
1. Исследования, такие как Криса Аргириса «Влияние бюджетов на людей» (Итака, Нью-Йорк: Корнельский университет, 1952 г.) и «Использование и неправильное использование средств контроля эффективности» Фрэнка Дж. Ясинского, HBR июль – август 1956 г., стр. 105, приведите конкретные примеры проблем, которые могут возникнуть из-за плохого использования систем обратной связи.
2. Энтони Г. Хопвуда «Система бухгалтерского учета и управленческое поведение » (Лондон: Haymarket Publishing, Ltd., 1974) и Герт Х. Хофстеде «Игра в бюджетный контроль» (Ассен, Нидерланды: Van Gorcum, 1967) рассматривают систематически о способах использования бухгалтерской информации и влиянии, которое это использование может иметь.
Версия этой статьи появилась в выпуске Harvard Business Review за январь 1976 г.Краткая история управления с обратной связью
Перепечатано с разрешения главы 1: Введение в современный контроль
Теория, в:
F.L. Льюис, Прикладное оптимальное управление и оценка, Прентис-Холл, 1992.
Содержание
- Наброски
- Краткая история автоматического управления
- Водяные часы Греки и арабы
- Индустриальный Революция
- Миллрайты
- Регуляторы температуры
- Поплавковые регуляторы
- Регуляторы давления
- Центробежные регуляторы
- Маятник Симпатия
- Рождение Математическая теория управления
- Дифференциальные уравнения
- Теория устойчивости
- Теория систем
- Массовые коммуникации и Телефонная система Bell
- Частотная область Анализ
- Мировые войны и Классический контроль
- Управление кораблем
- Разработка оружия и Наведение пистолета
- М.ЭТО. Радиация Лаборатория
- Стохастический анализ
- Классический период Теория управления
- Эпоха космоса / компьютеров и Modern Control
- Дизайн во временной области для Нелинейные системы
- Спутник – 1957
- Навигация
- Оптимальность в натуральном Системы
- Оптимальное управление и Теория оценок
- Нелинейное управление Теория
- Компьютеры в системе управления Дизайн и реализация
- Развитие Цифровые компьютеры
- Цифровое управление и Теория фильтрации
- Персональный компьютер
- Союз современного и Классический контроль
- Философия классического контроля
- Философия современного контроля
- Список литературы
Контур
В В этой главе мы представляем современную теорию управления двумя подходами.Первый Приведена краткая история теории автоматического управления. Затем мы описываем философии классической и современной теории управления.
Обратная связь управление – это основной механизм, с помощью которого системы, будь то механические, электрические или биологические, поддерживают их равновесие или гомеостаз. в высшие формы жизни, условия, при которых может продолжаться жизнь, вполне узкий. Изменение температуры тела на полградуса обычно является признаком болезнь.Гомеостаз тела поддерживается за счет использования обратной связи. контроль [Wiener 1948]. Основной вклад К.Р. Дарвина во время последнего века была теория, согласно которой обратная связь за длительные периоды времени отвечает за эволюция видов. В 1931 г. В. Вольтерра объяснил баланс между двумя популяциями рыб в закрытом пруду, используя теория обратной связи.
Обратная связь контроль можно определить как использование разностных сигналов, определяемых сравнение фактических значений системных переменных с их желаемыми значениями, как средства управления системой.Житейский пример системы управления с обратной связью это система контроля скорости автомобиля, в которой используется разница между фактическими и желаемая скорость для изменения расхода топлива. Поскольку вывод системы используется для регулирования его входа, такое устройство называется замкнутым контуром Система управления .
В В этой книге мы покажем, как использовать современную теорию управления для разработки системы управления с обратной связью. Таким образом, нас интересует не естественный контроль. системы, такие как те, которые встречаются в живых организмах или в обществе, но с искусственные системы управления, такие как те, которые используются для управления самолетами, автомобилями, спутниками, роботами и промышленными процессами.
Реализация что лучший способ понять область – изучить ее эволюцию и причины его существования, мы сначала представим краткую историю автоматических теория управления. Затем мы даем краткое обсуждение философии классическая и современная теория управления.
ссылки на главу 1 находятся в конце этой главы. Ссылки на Остаток книги появляется в конце книги.
1,1 КРАТКАЯ ИСТОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Там За последние годы в теории автоматического управления было сделано много разработок.Это трудно провести беспристрастный анализ участка, пока он еще развивающийся; однако, оглядываясь назад на развитие теории управления с обратной связью, к настоящему времени можно выделить некоторые основные тенденции и указать на некоторые ключевые достижения.
Обратная связь контроль – инженерная дисциплина. Таким образом, его прогресс тесно связан с практические проблемы, которые необходимо было решить на любом этапе жизнедеятельности человека. история. Ключевые события в истории человечества, повлиявшие на Ход контроля обратной связи составил:
1.Озабоченность греков и арабов точным отслеживанием времени. Это период от примерно 300 г. до н.э. до примерно 1200 г. н.э.
2. Промышленная революция в Европе. Промышленная революция общепризнанна началось в третьей четверти восемнадцатого века; однако его корни можно проследить до 1600-х годов.
3. Начало массовых коммуникаций и Первая и Вторая мировые войны. Этот представляет период примерно с 1910 по 1945 год.
4. Начало космической / компьютерной эры в 1957 году.
Один можно рассматривать их как фазы в развитии человека, на которых он впервые стал озабочен пониманием своего места в пространстве и времени, а затем укрощением его среды и сделать его существование более комфортным, затем с установлением его место в мировом сообществе и, наконец, его место в космосе.
в между промышленной революцией и мировыми войнами чрезвычайно важное развитие.А именно, теория управления начала приобретать свои письменный язык – язык математики. Дж. К. Максвелл предоставил первую строгий математический анализ системы управления с обратной связью в 1868 г. Таким образом, относительно этого письменного языка мы могли бы назвать период до 1868 г. предыстория автоматического управления.
подписок Фридланд [1986], мы можем назвать период с 1868 по начало 1900-х годов примитивный период автоматического управления.это Стандарт называть период с тех пор до 1960 года классическим периодом , и период с 1960 по настоящее время современный период .
Пусть Теперь мы быстро продвигаемся по истории автоматических средств управления. Ссылка для периода -300 до промышленной революции предоставлен [Mayr 1970], который мы будем использовать и время от времени цитировать. Видеть также [Фуллер, 1976]. Другие важные ссылки, использованные при подготовке этого раздела включены [М.Бухара 1973] и личные беседы. с Дж. Д. Аплевичем из Университета Ватерлоо, К. Пржилуски Польской академии наук и У. Аскью, бывший сотрудник LTV Missiles and Space Corporation и вице-президент E-Systems.
Вода Часы греков и арабов
основной мотивацией для управления с обратной связью во времена античности была необходимость точное определение времени. Так, примерно в 270 г. грек Ктесибиос изобрел поплавковый регулятор для воды. Часы.Функция этого регулятора заключалась в поддержании уровня воды в баке на постоянная глубина. Эта постоянная глубина обеспечивала постоянный поток воды через трубка на дне резервуара, которая наполняла второй резервуар с постоянной скоростью. Таким образом, уровень воды во втором резервуаре зависел от прошедшего времени.
регулятор Ktesibios использовал поплавок для управления приток воды через вентиль; когда уровень воды упал, клапан открылся и пополнили резервуар.Этот поплавковый регулятор выполнял ту же функцию. как мяч и петух в современном туалете со сливом.
А поплавковый регулятор использовался Филоном Византийским в -250 г. для поддержания постоянного уровень масла в лампе.
Во время в первом веке нашей эры Герон Александрийский разработал поплавковые регуляторы для воды. часы. Греки использовали поплавковый регулятор и подобные устройства для целей. такие как автоматическая раздача вина, конструкция сифонов для поддержания постоянные перепады уровня воды между двумя резервуарами, открытие храма двери и так далее.Эти устройства можно было бы назвать “гаджетами”, поскольку они были одними из первых примеров идеи поиска приложения.
В С 800 по 1200 гг., Различные арабские инженеры, такие как три брата Муса, Аль-Джазари и Ибн ас-Са_а_ти_ использовали поплавковые регуляторы для водяных часов и других приложений. Во время этого период использования важного принципа обратной связи «вкл / выкл», что снова возникает в связи с проблемами минимума времени в 1950-х годах.
Когда Багдад пал перед монголами в 1258 году. к концу.Более того, изобретение механических часов в 14 веке. сделали водяные часы и их систему управления с обратной связью устаревшими. (Механический часы не являются системой управления с обратной связью.) Поплавковый регулятор не появляется снова до его использования в промышленной революции.
Вдоль заботясь о своем месте во времени, ранний человек заботился о своем месте во времени. космос. Стоит отметить, что система управления с псевдо-обратной связью была разработан в Китае в XII веке для навигационных целей., указывающий на юг У колесницы была статуя, которая вращалась с помощью зубчатого механизма, прикрепленного к колеса колесницы так, чтобы она постоянно указывала на юг. С помощью направляя информацию, предоставленную статуей, возничий мог управлять прямой курс. Мы называем это системой управления с «псевдо-обратной связью». поскольку технически это не связано с обратной связью, если только действия возничего считаются частью системы. Таким образом, это не автоматический контроль. система.
The Промышленная революция
Промышленная революция в Европе последовала за введением тягачей , или самоходные машины. Это ознаменовалось изобретением прогрессивного зерна. мельницы, печи, котлы и паровой двигатель. Эти устройства не могли быть адекватно регулируется вручную, и поэтому возникла новая потребность в автоматическом Системы контроля. Было изобретено множество устройств управления, в том числе поплавковые. регуляторы, регуляторы температуры, регуляторы давления и контроля скорости устройств.
Дж. Ватт изобрел свой паровой двигатель в 1769 году, и эта дата является общепринятой датой. начало промышленной революции. Однако корни индустриального Революцию можно проследить до 1600-х годов или ранее с развитием зерновые мельницы и печи.
Один Следует знать, что другие, в первую очередь Т. Ньюкомен в 1712 г., построили первые Паровые двигатели. Однако первые паровые машины были неэффективны и регулировались. вручную, что делает их менее пригодными для промышленного использования.Это очень важно понять, что промышленная революция началась только после изобретения усовершенствованные двигатели и системы автоматического управления для их регулирования.
The Миллрайтс
Монтажники Великобритании разработали множество устройств управления с обратной связью. В веер, изобретенный в 1745 году британским кузнецом Э. Ли, состоял из небольшого вентилятор установлен под прямым углом к главному колесу ветряной мельницы. Его функция была постоянно направлять ветряную мельницу против ветра.
мельница-бункер – устройство, регулирующее поток зерна в мельнице в зависимости от от скорости вращения жернова. Он использовался в довольно доработанном форма примерно к 1588.
Кому построить контроллер обратной связи, важно иметь адекватных измерительных устройства . Слесари разработали несколько устройств для измерения скорости вращение. Используя эти датчики, было изобретено несколько устройств регулирования скорости, включая саморегулирующиеся паруса ветряных мельниц.Большая часть технологий Позже были разработаны мельницы для регулирования паровой машины.
Температура Регуляторы
Корнелис Дреббель из Голландии потратил время в Англии и короткий период с императором Священной Римской империи Рудольфом II в Прага вместе со своим современником Я. Кеплером. Около 1624 г. он разработал автоматическая система контроля температуры для печи, мотивированная его убеждениями что неблагородные металлы можно превратить в золото, удерживая их на точной постоянной температура в течение длительного времени.Он также использовал эту температуру регулятор в инкубаторе для вылупления цыплят.
Температура регуляторы были изучены J.J. Бехер в 1680 году и снова использовался в инкубаторе. принцем де Конти и Р.-А.Ф. де Ромюра в 1754 г. «Сторожевой регистр» был разработан в Америке У. Генри. около 1771 г., который предложил использовать его в химических печах, при производстве сталь и фарфор, а также в больничном термостате. Не было до 1777 г., однако, терморегулятор, пригодный для промышленного использования был разработан Bonnemain, который использовал его для инкубатор.Его устройство позже установили на печи водогрейного отопления. растение.
Поплавок Регуляторы
Регламент уровня жидкости была необходима в двух основных областях в конце 1700-х годов: котел паровой машины и в системах внутреннего водоснабжения. В связи с этим к регулятору плавающего курса повысился интерес, особенно в Великобритании.
В В своей книге 1746 года У. Сэлмон указал цены на шаровые поплавковые регуляторы. используется для поддержания уровня домашних водоемов.Этот регулятор использовался в первых патентах на унитаз со смывом около 1775 года. доработан Томасом Крэппером, лондонским водопроводчиком, рыцарем Королевы Виктории за изобретения.
Самое раннее известное использование регулятора с поплавковым клапаном в паровом котле описано в патент, выданный Дж. Бриндли в 1758 году. Он использовал регулятор в паровой машине. для перекачки воды. S.T. Вуд использовал поплавковый регулятор для паровой машины в своем пивоварня в 1784 году.В русской Сибири угольщик И.И. Ползунов разработал в 1765 году поплавковый регулятор для паровой машины, которая приводила в движение вентиляторы для доменные печи.
Автор 1791 г., когда он был принят фирмой Боултона и Ватт, поплавковый регулятор обычно использовался в паровых двигателях.
Давление Регуляторы
Другой проблема, связанная с паровой машиной, заключается в регулировании давления пара в котле, так как пар, приводящий в действие двигатель, должен быть на постоянном давление.В 1681 г. Д. Папен изобрел предохранительный клапан. для скороварки, а в 1707 году он использовал ее в качестве регулирующего устройства на своем паровой двигатель. С тех пор это стало стандартной функцией паровых двигателей.
Регулятор давления был доработан в 1799 году Р. Делапом, а также М. Мюррей. В 1803 году Боултон и Ватт объединили регулятор давления с поплавковым регулятором для использования в их паровых двигателях.
Центробежный Управляющие
первые паровые машины обеспечивали возвратно-поступательное движение на выходе, которое регулировалось с помощью устройства, известного как катаракта, похожего на поплавковый клапан.Катаракта возникла в насосных двигателях угольных шахт Корнуолла.
Дж. Паровая машина Ватта с вращающимся выходным движением достигла зрелости к 1783 году. когда была продана первая. Основным стимулом для его развития был очевидно, надежда ввести первичный двигатель в фрезерование. Используя поворотный Выходной двигатель, паровая мельница Альбиона начала работать в начале 1786 года.
А проблема, связанная с роторным паровым двигателем, заключается в регулировании его скорости революции.Некоторые из технологий регулирования скорости слесарей были разработан и расширен для этой цели.
В 1788 Ватт завершил разработку центробежного флайбола. регулятор для регулирования скорости роторного парового двигателя. Это устройство использовали два шарнирно вращающихся флайбола, которые были отброшено наружу под действием центробежной силы. По мере увеличения скорости вращения грузики раскачивались дальше и вверх, приводя в действие дроссельный клапан потока пара что замедлило двигатель.Таким образом, была достигнута постоянная скорость. автоматически.
упомянутые ранее устройства обратной связи либо оставались непонятными, либо играли неприметная роль как части контролируемого ими механизма. С другой рука, операция губернатора флайбола была отчетливо виден даже неподготовленному глазу, а его принцип имел экзотический аромат, который многим казался олицетворением природы новый индустриальный век. Таким образом, губернатор дошел до сознания инженерный мир и стал сенсацией во всей Европе.Это был первое использование контроля с обратной связью, о котором было известно широкой публике.
Это Стоит отметить, что греческое слово «правитель» – ku e r n a n. В 1947 году Норберт Винер в Массачусетский технологический институт искал название для своей новой дисциплины теории автоматов – управления. и общение в человеке и машине. При исследовании флайбола губернатор Ватта, он исследовал этимологию слова ku e r n a n и натолкнулся на греческое слово для рулевого, k у э р н т V.Таким образом, он выбрал название cybernetics для его молодой области.
вокруг 1790 г. во Франции братья Прие разработали поплавок. регулятор для управления скоростью парового двигателя, но их техника не была соответствовал центробежному регулятору и вскоре был вытеснен.
The Pendule Sympathique
Имея начали нашу историю автоматического управления с водяных часов Древней Греции, мы завершаем эту часть истории возвращением к заботам человечества с течением времени.
механические часы, изобретенные в 14 веке, не имеют обратной связи с обратной связью система управления, но прецизионное колебательное устройство с разомкнутым контуром, точность которого обеспечивается защитой от внешних воздействий. В 1793 г. франко-швейцарский А.-Л. Breguet, ведущий часовой мастер своего времени, изобрел замкнутую систему обратной связи для синхронизации карманных часов.
Симпатичный маятник Breguet использовал особый случай регулирования скорости. Это состояла из большого точного прецизионного хронометра с креплением для кармана смотреть.Карманные часы, которые нужно синхронизировать, немного вставляют в крепление. до 12 часов, когда из хронометра выходит штифт, вставки в часы и начинает процесс автоматической регулировки плечо пружины баланса часов. После нескольких размещений часов в симпатическом маятнике регулирующий рычаг регулируется автоматически. В некотором смысле это устройство использовалось для передать точность большого хронометра маленьким портативным карманным часам.
The Рождение математической теории управления
разработка систем управления с обратной связью вплоть до промышленной революции была методом проб и ошибок вместе с большой инженерной интуицией. Таким образом, это было больше искусством, чем наукой. В середине 1800-х годов математика была впервые использована анализировать устойчивость систем управления с обратной связью. Поскольку математика формальным языком теории автоматического управления, мы могли бы назвать период до на этот раз предыстория теории управления.
Дифференциал Уравнения
В 1840 г. британский королевский астроном в Гринвиче Г. Эйри, разработал обратную связь устройство наведения телескопа. Его устройством была система контроля скорости, которая автоматически повернул телескоп, чтобы компенсировать вращение Земли, предоставление возможности изучать данную звезду в течение длительного времени.
К сожалению, Эйри обнаружил, что из-за неправильной конструкции контура управления с обратной связью дикие в систему вводились колебания.Он был первым, кто обсудил нестабильность замкнутых систем, и первый, кто использовал дифференциальных уравнений в их анализ [Airy 1840]. К тому времени теория дифференциальных уравнений была хорошо развит, благодаря открытию исчисления бесконечно малых И. Ньютоном (1642-1727) и Г. Лейбниц (1646-1716) и работы братьев Бернулли (конец 1600-х – начало 1700-х годов), Дж. Ф. Риккати (1676-1754) и др. Использование дифференциальных уравнений при анализе движение динамических систем было установлено Дж.Л. Лагранж (1736-1813) и W.R. Гамильтон (1805-1865).
Устойчивость Теория
ранние работы в области математического анализа систем управления были с точки зрения дифференциальные уравнения. Дж. К. Максвелл проанализировал стабильность флайбольного регулятора Ватта [Maxwell 1868]. Его техника заключалась в том, чтобы линеаризуйте дифференциальные уравнения движения, чтобы найти характеристику уравнение системы. Он изучил влияние параметров системы на устойчивости и показал, что система устойчива, если корни Характеристическое уравнение имеет отрицательных действительных частей .С работой Максвелла можно сказать, что теория систем управления прочно утвердилась.
E.J. Раус предоставил численный метод для определения, когда характеристическое уравнение имеет устойчивые корни [Routh 1877].
Русский И. Вишнеградский [1877] проанализировал устойчивость регуляторов с помощью дифференциальных уравнений независимо от Максвелла. В 1893 году А. Стодола изучал регулирование водяная турбина по методике Вишнеградского.Смоделировал динамику актуатора и включил задержку срабатывания. механизм в его анализе. Он был первым, кто упомянул понятие системы . постоянная времени . Не зная о работах Максвелла и Рауса, он поставил проблема определения устойчивости характеристическое уравнение А. Гурвицу [1895], который решил его независимо.
работа А. Ляпунов был основоположником теории управления. Он изучал устойчивость нелинейных дифференциальных уравнений с помощью обобщенное понятие энергии 1892 г. [Ляпунов 1893].К сожалению, хотя его работа была применена и продолжена в России, время не созрел на Западе для его элегантной теории и оставался неизвестным там. примерно до 1960 года, когда его важность была окончательно осознана.
Британский инженер О. Хевисайд изобрел операционное исчисление в 1892-1898 годах. Он изучал переходное поведение систем, вводя понятие, эквивалентное передаточная функция .
Система Теория
Это находится в рамках исследования систем , что теория управления с обратной связью имеет свои место в организации человеческого знания.Таким образом, концепция системы как динамический объект с определенными «входами» и «выходами» присоединение его к другим системам и окружающей среде было ключевым предварительным условием для дальнейшее развитие теории автоматического управления. История системы Теория требует целого исследования, но следует ее краткий набросок.
Во время восемнадцатого и девятнадцатого веков, работы А. Смита по экономике [ Wealth of Nations , 1776], открытия К.Р. Дарвин [ На Происхождение видов путем естественного отбора 1859] и др. события в политике, социологии и эл. оказали большое влияние на человеческое сознание. Изучение естественного Философия была результатом работ греческих и арабских философов, и взносы были сделаны Николаем Кузанским (1463 г.), Лейбниц и др. Разработки девятнадцатого века, приправленные Промышленная революция и растущее понимание глобальной геополитика и астрономия оказали глубокое влияние на эту природную Философия, заставившая его изменить свою личность.
Автор начала 1900-х годов А. Уайтхед [1925] с его философией «органического механизм », Л. фон Берталанфи [1938], с его иерархические принципы организации, и другие начали говорить о «общая теория систем». В этом контексте эволюция контроля теория могла продолжаться.
Масса Связь и телефонная система Bell
в В начале 20 века произошло два важных события с точки зрения теории управления: развитие телефона и массовые коммуникации и мировые войны.
Частотный диапазон Анализ
математический анализ систем управления до сих пор проводился с использованием дифференциальные уравнения во временной области . В Bell Telephone В лабораториях 1920-х и 1930-х годов частотная область приближается к . разработан П.-С. де Лаплас (1749-1827), Ж. Фурье (1768-1830), А.Л. Коши (1789-1857) и другие исследовались и использовались в системы связи.
А основная проблема с развитием системы массовых коммуникаций, расширяющая на большие расстояния возникает необходимость периодически усиливать голосовой сигнал в длинные телефонные линии. К сожалению, если не проявить осторожность, не только информация, но также усиливается шум. Таким образом, конструкция подходящего Усилители-повторители имеют первостепенное значение.
Кому уменьшить искажения в усилителях репитера, H.S. Блэк продемонстрировал полезность отрицательной обратной связи в 1927 году [Black 1934].Дизайн проблема заключалась в том, чтобы ввести фазовый сдвиг на правильных частотах в система. Разработана теория регенерации для создания стабильных усилителей. по Х. Найквисту [1932]. Он вывел свой критерий устойчивости Найквиста на основе на полярном графике сложной функции. H.W. Боде в 1938 г. использовал величину и фаза – частотная характеристика сложной функции [Bode 1940]. Он исследовал устойчивость замкнутого контура, используя понятия усиления и фазы . маржа .
The Мировые войны и классический контроль
Как массовые коммуникации и более быстрые способы передвижения сделали мир меньше, Было много напряжения, поскольку мужчины проверяли свое место в глобальном обществе. Результат был Мировые войны, во время которых развитие систем управления с обратной связью стало вопрос выживания.
Корабль Контроль
An важной военной задачей в этот период было управление и навигация корабли, которые становились все более совершенными по своей конструкции.Среди первых Разработкой была разработка датчиков с целью управления с обратной связью. В 1910 г. Сперри изобрел гироскоп , который он использовал в стабилизация и управление кораблями, а затем и управление самолетами.
Н. Минорский [1922] представил свой трехчленный контролер для управление судами, тем самым став первым, кто использовал пропорционально-интегральную производную (ПИД-регулятор) контроллер. Он рассмотрел нелинейные эффекты в замкнутом контуре. система.
Оружие Разработка и наведение оружия
А главной проблемой в период мировых войн была проблема точного наведение орудий на движущийся корабль и самолет. С публикацией “Теория сервомеханизмов” Х.Л. Хзена. [1934], было начато использование математической теории управления в таких задачах. В своей статье Хзен ввел в оборот слово сервомеханизмов , что подразумевает отношения “ведущий / ведомый” в системах.
Бомбовой прицел Norden, разработанный во время Второй мировой войны, использовал синхронные ретрансляторы для передачи информации о высоте и скорости самолета и ветровые помехи прицела, обеспечивающие точную доставку оружия.
M.I.T. Радиационная лаборатория
Кому изучить проблемы управления и обработки информации, связанные с вновь изобрел радар, в Массачусетсе была открыта Радиационная лаборатория. Технологический институт 1940 г.Большая часть работы по теории управления во время 1940-е годы вышли из этой лаборатории.
Пока работая над совместным проектом M.I.T./Sperry Corporation в 1941 году, A.C. Hall признали пагубные последствия игнорирования шума при проектировании систем управления. Он понял, что технология частотной области, разработанная в Bell Labs, может использоваться для противодействия шумовым эффектам, и использовал этот подход для разработки система управления бортовой РЛС. Этот успех убедительно продемонстрировал важность частотных методов при проектировании систем управления [Холл 1946].
Использование подходы к проектированию, основанные на передаточной функции, блок-схеме и методы частотной области, был большой успех в разработке элементов управления на Радиационная лаборатория. В 1947 году Н. Николс разработал свою диаграмму Nichols Chart для проектирование систем обратной связи. С M.I.T. работа, теория линейных сервомеханизмы были прочно установлены. Краткое изложение M.I.T. Радиационная лаборатория работа представлена в Теории сервомеханизмов [Джеймс, Николс и Филлипс, 1947].
Рабочий в North American Aviation W.R. Evans [1948] представил свой корневой локус метод, который обеспечил прямой способ определения полюса замкнутого контура локации в s-плоскости. Впоследствии, в течение 1950-х годов, многие элементы управления работали был сосредоточен на S-плоскости, и на получении желаемой замкнутой петли характеристики скачкообразной реакции с точки зрения времени нарастания, процентное превышение и так далее.
Стохастик Анализ
Во время также в этот период в управление введено стохастических методик . и теория коммуникации.В 1942 г. в Массачусетском технологическом институте Н. Винер [1949] проанализировал системы обработки информации с использованием моделей случайных процессов. Работает в частотной области он разработал статистически оптимальный фильтр для стационарные сигналы непрерывного времени, которые улучшили отношение сигнал / шум в система связи. Русский А. Колмогоров [1941] выдвинул теорию стационарные случайные процессы с дискретным временем.
The Классический период теории управления
Автор теперь теория автоматического управления, использующая методы частотной области, пришла из возраст, утвердившийся как парадигма (в смысле Куна [1962]).На с одной стороны, была создана прочная математическая теория сервомеханизмов, а с другой стороны, были предоставлены методы инженерного проектирования. Период после Вторую мировую войну можно назвать классическим периодом контроля теория. Для него характерно появление первых учебников [MacColl 1945; Лауэр, Лесник и Matdon 1947; Браун и Кэмпбелл 1948; Каштан и Mayer 1951; Truxall 1955], и прямо инструменты проектирования, обеспечивающие отличную интуицию и гарантированные решения для проектирования проблемы.Эти инструменты применялись с помощью ручных расчетов или, самое большее, скольжения. правила вместе с графическими приемами.
The Космос / компьютерный век и современный контроль
с с приходом космической эры дизайн управления в США отвернулся от частотных методов классической теории управления и обратно к методы дифференциального уравнения конца 1800-х годов, которые были сформулированы в временная область .Причины такого развития следующие.
во временной области Расчет для нелинейных систем
парадигма классической теории управления очень подходила для проектирования средств управления проблемы во время и сразу после мировых войн. Подход частотной области подходит для линейных систем , не зависящих от времени. Это в лучшем виде при работе с системами с одним входом и одним выходом , для графические методы было неудобно применять с несколькими входами и выходы.
Классика Дизайн управления имел некоторые успехи с нелинейными системами. С помощью свойства подавления шума методов частотной области, система управления может быть спроектированным таким образом, чтобы быть устойчивым к изменениям в параметрах системы, и ошибкам измерений и внешним помехам. Таким образом, классические техники могут использоваться на линеаризованной версии нелинейной системы, давая хорошие результаты при точка равновесия, относительно которой поведение системы приблизительно линейно.
Частотная область методы также могут быть применены к системам с простыми типами нелинейностей используя подход , описывающий функцию , который опирается на метод Найквиста критерий. Впервые эту технику применил поляк Я. Грошковский. в конструкции радиопередатчиков до Второй мировой войны и оформлен в 1964 г. Я. Кудревич.
К сожалению, невозможно разработать системы управления для продвинутых нелинейных многопараметрические системы, например, возникающие в аэрокосмических приложениях, использующие предположение о линейности и обработка одиночного входа / одиночного выхода пары передачи по одной.
В в Советском Союзе была большая деятельность в области нелинейного управления дизайн. Вслед за Ляпуновым внимание привлекли сосредоточены на методах временной области. В 1948 году Иваченко исследовал принцип действия реле , где управляющий сигнал переключается между дискретными значениями прерывисто. Цыпкин использовал фазовую плоскость для проектирования нелинейных регуляторов в 1955 году. Попов [1961] предоставил свой круговой критерий для нелинейного анализа устойчивости.
Спутник – 1957
Дано истории теории управления в Советском Союзе, естественно, что Первый спутник Спутник был запущен здесь в 1957 году. Первая конференция недавно созданная Международная федерация автоматического контроля (IFAC) была достойно проведено в Москве в 1960 году.
запуск спутника вызвал огромную активность в США в проектирование автоматики управления. При провале любой парадигмы возвращение к необходимы исторические и естественные основные принципы.Таким образом, было ясно, что необходимо было вернуться к временным методам “примитивного” период теории управления, которые основывались на дифференциальных уравнениях. Должно Следует понимать, что работа Лагранжа и Гамильтона упрощает написать нелинейные уравнения движения для многих динамических систем. Таким образом, контроль Требовалась теория, которая могла бы иметь дело с такими нелинейными дифференциальными уравнениями.
Это Примечательно, что почти ровно в 1960 году произошли важные события. независимо по нескольким направлениям теории коммуникации и управления.
Навигация
В В 1960 году К.С. Дрейпер изобрел свою инерциальную навигационную систему, которая использовала гироскопы для предоставления точной информации о положение тела, движущегося в пространстве, например корабля, самолета или космического корабля. Таким образом, датчики, подходящие для проектирования навигации и управления, были развитый.
Оптимальность В естественных системах
Иоганн Бернулли первым упомянул принцип оптимальности в связи с с проблемой брахистохрона в 1696 году.Этот проблема была решена братьями Бернулли и И. Ньютоном, и стало ясно что стремление к оптимальности является фундаментальным свойством движения в естественных системы. Были исследованы различные принципы оптимальности, в том числе принцип минимального времени в оптике П. де Ферма (1600-е гг.), работы Л. Эйлера в 1744 г. и результат Гамильтона о том, что система движется таким образом, чтобы минимизировать интеграл по времени от разности кинетической и потенциальной энергий.
Эти Принципы оптимальности – это все минимальных принципов . что интересно достаточно, чтобы в начале 1900-х годов А. Эйнштейн показал, что относительно четырехмерного система координат пространства-времени, движение систем происходит таким образом, чтобы максимизировать времени.
Оптимальный Теория контроля и оценки
С естественные системы демонстрируют оптимальность в своем движении, это имеет смысл оптимальным образом проектировать искусственные системы управления.Основным преимуществом является что этот дизайн может быть реализован во временной области. В контексте современный дизайн управления, обычно минимизируют время транспортировки, или квадратичный обобщенный функционал энергии или индекс производительности , возможно с некоторыми ограничениями на допустимые элементы управления.
р. Беллман [1957] применил динамическое программирование для оптимального управления системы с дискретным временем, демонстрируя, что естественное направление решения задача оптимального управления – назад во времени .Его процедура привела в замкнутых, как правило, нелинейных схемах обратной связи.
Автор 1958 г., Л. Понтрягин развил свой максимум принцип , который решал задачи оптимального управления на основе исчисления вариаций разработал Л. Эйлер (1707-1783). Он решил задача минимального времени, вывод закона управления реле включения / выключения как оптимального контроль [Понтрягин, Болтянский, Гамкрелидзе и Мищенко 1962]. В США.в 1950-х годах вариационное исчисление применялось к общие задачи оптимального управления в Чикагском университете и в других местах.
В 1960 г. были опубликованы три основные статьи Р. Калмана. и коллеги, работающие в США. Один из них [Kalman и Бертрам 1960], пропагандировал жизненно важные работы Ляпунова. в управлении нелинейными системами во временной области. Следующий [Кальман 1960a] обсуждали оптимальное управление системами, предоставляя расчетные уравнения для линейно-квадратичного регулятора (LQR) .В третьей статье [Kalman 1960b] обсуждалась оптимальная фильтрация и оценка. теория, обеспечивающая расчетные уравнения для дискретного устройства Кальмана фильтр . Фильтр Калмана непрерывного действия был разработан Калманом и Бьюси [1961].
В В течение года основными ограничениями классической теории управления были преодолены, были введены важные новые теоретические инструменты, и началась новая эра в теория управления началась; мы называем это эпохой современного управления .
Ключевые моменты работы Калмана заключаются в следующем. Это временной интервал подход , что делает его более применимым для изменяющихся во времени линейных систем, как а также нелинейные системы. Он представил линейную алгебру и матрицы , чтобы можно было легко обрабатывать системы с несколькими входами и выходами. Он использовали концепцию внутреннего состояния системы ; таким образом, подход тот, который касается внутренней динамики системы, а не только его поведение ввода / вывода.
В теории управления, Калман формализовал понятие оптимальности . в теории управления путем минимизации очень общего квадратичного обобщенного энергетическая функция. В теории оценивания он ввел стохастические понятия, которые применяется к нестационарным нестационарным системам , таким образом обеспечивая рекурсивное решение, фильтр Калмана, для Метод наименьших квадратов, впервые примененный К.Ф. Гаусс (1777-1855) на планетной орбите оценка. Фильтр Калмана – естественный расширение фильтра Винера на нестационарные стохастические системы.
Классика методы частотной области предоставляют формальные инструменты для проектирования систем управления, однако сама фаза проектирования оставалась в значительной степени искусством и привела к появлению неуникальных систем обратной связи. Напротив, теория Калмана предоставила оптимальных решений , которые дали системы управления с гарантированной производительностью . Эти элементы управления были Непосредственно найдено путем решения уравнений построения формальных матриц , которые в общем были уникальные решения.
Это не случайно, что с этого момента космическая программа США расцвела, с фильтром Калмана, предоставляющим навигационные данные для первых посадка на луну.
Нелинейный Теория управления
Во время 1960-е годы в США, G. Zames [1966], I.W. Сандберг [1964], К. Нарендра [Нарендра и Голдвин, 1964], К.А. Desoer [1965] и другие расширили работы Попова и Ляпунова по нелинейной устойчивости. Был обширный применение этих результатов при исследовании нелинейных искажений в петли обратной связи с ограниченной полосой пропускания, нелинейное управление процессом, управление самолетом дизайн, а затем и робототехника.
Компьютеры в разработке и внедрении средств управления
Классика методы проектирования можно использовать вручную с использованием графических подходов. На С другой стороны, современный дизайн органов управления требует решения сложных нелинейные матричные уравнения. К счастью, в 1960 г. разработки в другой области – цифровой вычислительной технике. Без компьютеров, современный контроль имел бы ограниченное применение.
The Разработка цифровых компьютеров
примерно в 1830 К. Бэббидж представил современные компьютерные принципы, включая память, программное управление и возможности ветвления. В 1948 г. Дж. Фон Нейман поставил создание компьютера с хранимой программой IAS в Принстоне. IBM построила свой Машина с хранимой программой SSEC. В 1950 году Сперри Рэнд построил первый коммерческий машина обработки данных, UNIVAC I. Вскоре после этого IBM начала продавать 701 компьютер.
В В 1960 г. произошел крупный прорыв – появилось второе поколение компьютеров. представил, который использовал твердотельную технологию . К 1965 году Digital Equipment Corporation создавала PDP-8 и миникомпьютер . промышленность началась. Наконец, в 1969 году У. Хофф изобрел микропроцессор .
Цифровой Теория управления и фильтрации
Цифровой В современных средствах управления компьютеры необходимы для двух целей.Во-первых, они требуется, чтобы решить уравнения дизайна матрицы , которые дают закон. Это выполняется в автономном режиме в процессе проектирования. Во-вторых, поскольку оптимальные законы управления и фильтры, как правило, изменяются во времени, они необходимы для реализует современных схем управления и фильтрации на реальных системах.
с Появление микропроцессора в 1969 году привело к развитию новой области. Системы контроля которые реализуются на цифровых компьютерах, должны быть сформулированы в виде дискретных время .Таким образом, рост теории цифрового управления был естественным. В настоящее время.
Во время 1950-х годов теория систем выборочных данных разрабатывалась в Колумбия Дж. Р. Рагаццини, Дж. Франклина и Л. А. Заде [Рагаццини и Заде 1952, Рагаццини и Франклин 1958]; а также Э. Юрий [1960], B.C. Куо [1963] и др. Идея использования цифровых компьютеров для промышленных В этот период возникло управление процессом [strm и Виттенмарк 1984].Серьезная работа началась в 1956 году. с совместным проектом между TRW и Texaco, в результате которого система компьютерного управления, устанавливаемая на нефтеперерабатывающем заводе Порт-Артур в г. Техас в 1959 году.
разработка ядерных реакторов в 1950-х гг. мотивация к изучению АСУ ТП и КИПиА. Этот работа уходит корнями в контроль над химическими заводами в 1940-х годах.
Автор 1970 г., с работами К.strm [1970] и другие, важность цифровых средств управления в технологических приложениях была твердо учредил.
работа К.Э. Шеннона в 1950-х годах в Bell Labs показала важность методы дискретизации данных при обработке сигналов. Приложения digital Теория фильтрации была исследована в Analytic Sciences Corporation. [Gelb 1974] и др.
The Персональный компьютер
с с появлением ПК в 1983 году разработка современных систем управления стала возможно для индивидуального инженера.После этого появилось множество программного обеспечения. разработаны пакеты проектирования систем управления, в том числе ORACLS, Program CC, Control-C, PC-Matlab, МАТРИЦА x , Easy5, SIMNON и другие.
The Союз современного и классического контроля
с издание первых учебников в 1960-х годах, современная теория управления зарекомендовала себя как парадигма проектирования автоматических средств управления в США. Последовала интенсивная исследовательская и внедренческая деятельность, в результате чего I.R.E. и A.I.E.E. слияние, во многом благодаря усилиям П. Хаггерти из Техаса Инструменты, чтобы сформировать Институт инженеров по электротехнике и радиоэлектронике (I.E.E.E) в начале 1960-х гг.
с при всей своей мощи и преимуществах, в некоторых аспектах не хватало современного управления. В гарантированная производительность, полученная путем решения уравнений матричного проектирования, означает, что часто можно спроектировать систему управления, которая теоретически работает без получение инженерной интуиции о проблеме.С другой С другой стороны, частотные методы классической теории управления придают большая интуиция.
Другой Проблема в том, что современная система управления с любым компенсатором динамики может выйти из строя быть устойчивым к возмущениям, немоделированной динамике, и шум измерения. С другой стороны, надежность встроена в частотный подход с использованием таких понятий, как коэффициент усиления и запас по фазе.
Следовательно, в 1970-х годах, особенно в Великобритании, была большая активность Автор: Х.Х. Розенброк [1974], A.G.J. MacFarlane и I. Postlethwaite [1977] и другие, расширяющие классические методы частотной области и корневой годограф для многомерных систем. Успехи были достигнуты с использованием таких понятий, как характерное геометрическое место, диагональ доминирование и обратный массив Найквиста.
А Основным сторонником классических методов для многомерных систем был И. Горовица, чья теория количественной обратной связи разработала в начале 1970-е годы обеспечивают надежную конструкцию с использованием диаграммы Николса.
В В 1981 году появились основополагающие статьи Дж. Дойла и Г. Стейна [1981] и М.Г. Сафонов, А.Дж. Лауб и Г.Л. Хартманн [1981]. Расширение основополагающая работа Макфарлейна и Постлтуэйта [1977], они показали важность графиков сингулярного значения по сравнению с частота в надежной многопараметрической конструкции. Используя эти графики, многие из классические методы частотной области могут быть включены в современный дизайн. Эту работу в авиастроении и управлении производством вел М.Афаны [1986] и другие. Результатом является новая теория управления , которая сочетает в себе лучшие черты классической и современной техники. Обзор этого робастного современная теория управления предоставлена П. Дорато [1987].
1,2 ФИЛОСОФИЯ КЛАССИЧЕСКОГО КОНТРОЛЯ
Имея некоторое понимание истории теории автоматического управления, теперь мы можем кратко обсудим основные положения классической и современной теории управления.
Разработка Как и в случае с усилителями с обратной связью, классическая теория управления была естественным совмещен в частотной области и s-плоскости . Опираясь на преобразование методы, это в первую очередь применимо для линейных систем, не зависящих от времени , хотя некоторые расширения нелинейных систем были сделаны с использованием, например, описание функции.
описание системы, необходимое для проектирования средств управления с использованием методов Найквиста и Боде – это величина и фаза частотной характеристики.Это выгодно поскольку частотную характеристику можно измерить экспериментально. Перевод функция затем может быть вычислена. Для дизайна корневого локуса передаточная функция нужный. Блок-схема широко используется для определения передаточных функций композитные системы. Точное описание внутренней динамики системы не нужен для классического дизайна; то есть только поведение ввода / вывода системы имеет значение.
дизайн может быть выполнен вручную с использованием графических методов .Эти методы дают большую интуицию и предоставляют средства управления конструктор с рядом возможностей дизайна, так что в результате управления системы не уникальны . Процесс проектирования – это инженерное искусство.
А реальная система имеет помехи и измерительный шум и не может быть описана именно по математической модели, которую инженер использует при проектировании. Классический теория естественна для проектирования систем управления, устойчивых к такие нарушения, несмотря на них, дают хорошие результаты в замкнутом контуре.Крепкий при проектировании используются такие понятия, как усиление и запас по фазе.
Простой компенсаторы как схемы пропорционально-интегрально-производной (PID), опережения-запаздывания или размывающих цепей обычно используется в структуре управления. Влияние таких схем на Графики Найквиста, Боде и корневого локуса легко понять, так что подходящий Состав компенсатора можно выбрать. После проектирования компенсатор может быть легко настраивается в режиме онлайн.
А фундаментальным понятием классического управления является способность описывать замкнутый контур свойства в терминах свойств разомкнутого контура , которые известны или легко поддаются мера.Например, графики Найквиста, Боде и корневого локуса представлены в терминах передаточная функция разомкнутого контура. Опять же, подавление возмущений с обратной связью свойства и установившаяся ошибка могут быть описаны с точки зрения возврата разница и чувствительность.
Классика Теория управления трудно применить в системе с несколькими входами и выходами (MIMO), или многоконтурные системы . Из-за взаимодействия контуров регулирования в многопараметрическая система, каждая передаточная функция с одним входом / одним выходом (SISO) может иметь приемлемые свойства с точки зрения переходной характеристики и устойчивости, но согласованное управляющее движение системы может оказаться неприемлемым.
Таким образом, классический MIMO или многопетлевой дизайн требует кропотливое усилие, используя подход , закрывая по одной петле за раз по графические приемы. Например, корневой годограф должен быть нанесен для каждого элемент усиления с учетом ранее выбранных коэффициентов усиления. Это проб и ошибок процедура, которая может потребовать нескольких итераций, и не гарантирует хорошие результаты, или даже стабильность замкнутого цикла .
многомерные подходы в частотной области, разработанные британской школой во время 1970-е годы, а также теория количественной обратной связи преодолели многие из этих ограничения, обеспечивающие эффективный подход к проектированию многих MIMO системы.
1,3 ФИЛОСОФИЯ СОВРЕМЕННОГО КОНТРОЛЯ
Современное Дизайн элементов управления – это, по сути, техника во временной области. Точное пространство состояний требуется модель контролируемой системы или установки. Это вектор первого порядка дифференциальное уравнение вида
dx / dt = Топор + Бу
y = Сх
, где x (t) – вектор внутренних переменных или состояний системы, u (t) – вектор управляющих входов, а y (t) – вектор измеренных выходов.Можно добавить термины шума для представления шумы процесса и измерения. Обратите внимание, что растение описано в область времени.
Сила современного контроля коренится в том факте, что модель в пространстве состояний может также представлять систему MIMO как систему SISO. То есть u (t) и y (t) обычно являются векторами, элементами которых являются отдельные скалярные входы и выходы. Таким образом, A, B, C – это матриц , у которых элементы описывают динамические взаимосвязи системы.
Современное методы управления были впервые прочно установлены для линейных систем. Расширения к нелинейным системам могут быть сделаны с помощью теории Ляпунова. подход, который легко распространяется на системы MIMO, динамическое программирование и другие техники. Оптимальные схемы управления без обратной связи могут быть определены для нелинейных систем путем решения нелинейных двухточечных краевых задач.
Ровно как и в классическом случае, некоторые фундаментальные вопросы о производительности Замкнутую систему можно атаковать, исследуя разомкнутых свойств .Например, свойства разомкнутого контура управляемости и наблюдаемости (0 (Глава 2) дает представление о том, чего можно достичь с помощью обратной связи контроль. Разница в том, что для работы с моделью пространства состояний хороший знание матриц и линейной алгебры требуется .
Кому достичь подходящих свойств замкнутого контура, управление с обратной связью в форме
u = -Kx
можно использовать. Коэффициент усиления обратной связи K представляет собой матрицу , элементами которой являются индивидуальные коэффициенты усиления управления в система.Поскольку все состояния используются для обратной связи, это называется переменной состояния . обратная связь . Обратите внимание, что множественные коэффициенты обратной связи и большие системы легко обрабатывается в этой структуре. Таким образом, если имеется n компонентов состояния (где n может быть очень большим в аэрокосмической системе или системе распределения энергии) и m скаляр управляет, так что u (t) является m-вектором, тогда K – матрица размера mxn с mn элементами, соответствующие mn контурам регулирования.
В стандартного линейно-квадратичного регулятора (LQR), коэффициент обратной связи K выбран так, чтобы минимизировать квадратичный индекс производительности (PI) во временной области как
oo
J = / (x T Qx + u T Ru) dt
o
Требуется минимум все государственные траектории.Это расширение систем MIMO типа ИП (ITSE, ITAE и др.), Которые использовались в классическом контроле. Q и R – весовые матрицы, которые служат в качестве схемы . параметры . Их элементы можно выбрать, чтобы обеспечить подходящие представление.
Ключом к дизайну LQR является Тот факт, что если матрица усиления обратной связи K может быть успешно выбрана так, чтобы J конечно, то интеграл (0, содержащий нормы u (t) и x (t)) ограничен. Если Q и R выбраны правильно, хорошо известные математические принципы затем гарантируют, что x (t) и u (t) идут к нулю со временем.Этот гарантирует стабильность замкнутого цикла , а также ограниченные управляющие сигналы в замкнутой системе.
Может быть показан (см. Главу 3), что значение K, минимизирующее PI, равно
K = R -1 B T S
, где S – nxn матрица, удовлетворяющая уравнению Riccati
0 = A T S + SA – SBR -1 B T S + Q.
В рамках этого LQ, можно отметить несколько моментов.Во-первых, пока система (0 управляема и Q и R выбраны подходящим образом, K определяется этими уравнения гарантирует стабильность замкнутой системы
dx / dt = (A-BK) х + Bu.
Во-вторых, эта техника легко применять даже для установок с несколькими входами, так как u (t) может быть вектором, имеющим много компонентов.
В-третьих, решение LQR полагается на решение уравнения проектирования матриц (0, и поэтому не подходит для ручных расчетов.К счастью, многие дизайнерские пакеты к настоящему времени доступны на цифровых компьютерах для решения задачи Риккати. расчетное уравнение для S и, следовательно, для получения K. Таким образом, с помощью компьютера Дизайн является неотъемлемой частью современных средств управления.
Решение LQR является формальным тот, который дает уникальный ответ на проблему управления с обратной связью один раз выбран расчетный параметр Q. Фактически, инженерного искусства в современный дизайн заключается в выборе весовых матриц PI Q и R .Теоретические основы этого процесса отбора были разработаны. Как только Q выбран правильно, уравнение матричного дизайна формально решается для единственного K, что гарантирует стабильность.
Обратите внимание, что K – это вычисляется с помощью величин разомкнутого контура A, B, Q, так что современные и классический дизайн имеет эту особенность определения свойств замкнутого контура в общие термины разомкнутых величин. Однако в современном управлении все элементы K определяются одновременно с использованием матричного дизайна уравнения.Это соответствует закрытию всех контуров управления с обратной связью. одновременно , что полностью контрастирует с режимом “один цикл за раз” процедура проектирования классических средств управления.
К сожалению, формальный LQR дизайн дает очень мало интуитивного представления о природе или свойствах замкнутая система . В последние годы этот недостаток был устранен. с самых разных точек зрения.
Хотя LQR проектирует с использованием обратная связь по состоянию гарантирует стабильность замкнутого цикла, все компоненты состояния редко доступны для обратной связи в практических задачах проектирования.Следовательно, выводит обратную связь в форме
.u = -Ky
полезнее. LQR дизайн уравнения для обратной связи по выходу сложнее, чем (0, но легко производные (см. главу 4).
Современный дизайн с обратной связью по выходу позволяет проектировать от одного до контроллеров для сложных систем с несколькими входов и выходов путем формального решения уравнений матричного проектирования на цифровой компьютер.
Еще одним важным фактором является следующие.В то время как обратная связь состояния (0 включает обратную связь от всех состояний к все входы, не имеющие структуры в системе управления, обратная связь по выходу закон управления (0 можно использовать для разработки компенсатора с желаемым динамическим структура , восстановившая большую часть интуиции классического дизайна элементов управления.
Законы обратной связи типа (0 и (0 называются статическими , поскольку коэффициенты усиления постоянны или не более изменяющийся во времени. Альтернативой статической обратной связи по выходу является использование динамического компенсатор формы
дз / дт = Fz + Gy + Eu
u = Гц + Dy.
Входы этого Компенсатором являются входы и выходы системы. Это дает замкнутый цикл и называется , динамическая обратная связь по выходу . Задача дизайна – выбрать матрицы F, G, E, H, D для хорошей замкнутой представление. Важным результатом современного управления является то, что замкнутый контур стабильность можно гарантировать, выбрав F = A-LC для некоторой матрицы L, которая вычисляется с использованием уравнения проектирования Риккати, аналогичного (0. Остальные матрицы в (0 тогда легко определяются.Этот дизайн основан по жизненно важному принципу разделения (Глава 10).
Недостаток дизайна использование F = A-LC состоит в том, что тогда динамический компенсатор имеет такое же количество внутренние состояния как растение. В сложной современной аэрокосмической и силовой установке приложений этот размер может быть очень большим. Таким образом, различные техники для контроллера Редукция и уменьшенная конструкция были разработаны.
В стандартном современном управлении, предполагается, что система точно описывается математической моделью (0.В на самом деле, однако, эта модель может быть лишь приблизительным описанием настоящий завод. Более того, на практике могут возникать помехи, воздействующие на растения, а также шум измерений при определении y (t).
LQR с использованием полного состояния обратная связь обладает некоторыми важными свойствами устойчивости к таким расстройствам, например, бесконечный запас усиления, 60 запаса по фазе и устойчивости к некоторым нелинейностям в контурах управления (Глава 10). С другой стороны, LQR с использованием статического или динамического вывода конструкция обратной связи не имеет гарантированных свойств устойчивости.С работой на надежный современный контроль в начале 1980-х, теперь есть техника (LQG / LTR, Глава 10) для разработки надежных систем управления с несколькими переменными. LQG / LTR дизайн включает строгий анализ влияния неопределенностей моделирования на устойчивость замкнутого контура и влияние помех на характеристики замкнутого контура.
С работой над надежным современный дизайн, большая часть интуиции классических методов управления может теперь будет включен в современный многопараметрический дизайн .
С современными разработками в цифровом теория управления и системы дискретного времени , современное управление очень подходит для проектирования систем управления, которые могут быть реализованы на микропроцессоры (Часть III книги). Это позволяет реализовать динамика контроллера, который сложнее и эффективнее, чем простые структуры PID и опережения-запаздывания классических элементов управления.
С недавней работой в матрице-дроби описаний и полиномиального уравнения , MIMO-объект может быть описывается не в форме пространства состояний, а в форме ввода / вывода.Это прямой расширение описания классической передаточной функции и, для некоторых приложений, больше подходит, чем внутреннее описание (0.
ССЫЛКИ К ГЛАВЕ 1
Эйри, Г. Б., “О Регулятор часов для обеспечения равномерного движения Экваториалы, Мемуары Королевского астрономического общества , том II, стр. 249-267, 1840.
strm, K.J., Введение в Теория стохастического управления , Нью-Йорк: Academic Press, 1970.
strm, K.J., and B. Wittenmark, Computer-Controlled Systems: Theory and Дизайн , Нью-Джерси: Прентис-Холл, 1984.
Беллман, Р., Динамический Программирование , Нью-Джерси: Princeton Univ. Press, 1957.
Берталанфи, Л. фон, “А” количественная теория органического роста », Human Biology , vol. 10, С. 181-213, 1938.
Черный, H.S., “Стабилизированный” Усилители обратной связи », Bell Syst. Tech. J. , 1934.
Bode, H.W., “Обратная связь” Дизайн усилителя », Bell System Tech. J. , vol. 19, p. 42, 1940.
Бухарае, М., Краткое содержание История теории управления , Внутренний отдел, Школа избранных. Eng., Ga. Inst. of Technology, Атланта, Джорджия, 30332, 1973.
Браун, Г.С. и Д.П. Кэмпбелл, Принципы сервомеханизмов , Нью-Йорк: Wiley, 1948.
Chestnut, H. and R.W. Mayer, Сервомеханизмы и проектирование систем регулирования , т.1, 1951, т. 2, 1955, Wiley.
Desoer, C.A., “A” Обобщение критерия Попова, IEEE Trans. Autom. Control , vol. AC-10, No. 2, pp. 182-185, 1965.
Дорато, П., “Исторический Обзор робастного управления, IEEE Control Systems Magazine , стр. 44–47, апрель 1987 г.
Дойл, Дж. К. и Г. Штейн, «Дизайн с многовариантной обратной связью: концепции классического / современного Синтез, IEEE Trans. Automat. Contr. , vol.AC-26, стр. 4-16, Февраль 1981 г.
Эванс, W.R., “Графический Анализ систем управления, Trans. AIEE , vol. 67, pp. 547-551,1948.
Фридланд, Б., Система управления Дизайн: Введение в методы пространства состояний , Нью-Йорк: McGraw-Hill, 1986.
Фуллер, A.T., “Ранний Развитие теории управления, Trans. ASME (J. Dynamic Systems, Измерение и контроль) , т. 98G, нет. 2, стр. 109-118, июнь 1976 г.
Фуллер, A.T., “Ранний Развитие теории управления II, Trans. ASME (J. Dynamic Systems, Измерение и контроль) , т. 98G, нет. 3 стр. 224-235, сентябрь 1976 г.
Gelb, A., ed., Applied Оптимальная оценка , Кембридж: MIT Press, 1974.
Холл, A.C., “Приложение” от теории цепей к разработке сервомеханизмов, J. Franklin Inst. , 1966.
Хзен, Х.Л., “Теория Сервомеханизмы », J.Franklin Inst ., 1934.
.Гурвиц А., “На Условия, при которых уравнение имеет корни только с отрицательными вещественными числами Parts, Mathematische Annalen , vol. 46, pp. 273-284, 1895.
Джеймс, Х.М., Н.Б. Николс, и Р.С. Филлипс, Теория сервомеханизмов , Нью-Йорк: МакГроу-Хилл, M.I.T. Радиационная лаборатория. Серия, Vol. 25, 1947.
Юрий Е.И., “Недавний Достижения в области дискретных данных и цифровых систем управления, Proc.Конф. Int. Федерация Автомат. Контроль , с. 240-246, Москва, 1960.
Кальман Р.Е., “Взносы к теории оптимального управления », Бол . Soc. Мат. Mexicana , т. 5. С. 102-119, 1960.
.Кальман Р.Э. “Новый подход к задачам линейной фильтрации и прогнозирования, ASME J. Basic Eng. , т. 82, стр. 34-45, 1960.
Kalman, R.E. и Р.С. Бьюси, “Новые результаты в линейной фильтрации и прогнозировании Теория », ASME J.Базовый англ. , т. 80, стр. 193–196, 1961.
Kalman, R.E., and J.E. Bertram, «Анализ и проектирование систем управления с помощью« второго метода »Ляпунова. I. Системы с непрерывным временем», Пер. КАК Я J. Basic Eng. , pp. 371-393, June 1960.
Колмогоров А.Н., “Интерполяция и экстраполяция по Стантарену Зуфаллиген Фольген, “ Bull. Акад. Sci. СССР , сер. Математика. т. 5. С. 3-14, 1941.
.Кун Т.С., Структура научных революций , Чикаго: Univ.of Chicago Press, 1962.
Куо, Бенджамин К., Анализ и синтез систем управления выборочными данными , Нью-Джерси: Прентис-Холл, 1963.
Лауэр, Х., Р.Н. Лесник и Л. Matdon, Сервомеханизм Основы , Нью-Йорк: McGraw-Hill 1947.
Ляпунов М.А., Problme gnral de la stabilit du mouvement, Ann. Фак. Sci. Тулуза , т. 9. С. 203-474, 1907. (Перевод оригинальная статья опубликована в 1892 г. в Comm.Soc. Математика. Харьков и переиздан как Vol. 17 в Ann. Математические исследования, Принстонский университет Press, Princeton, N.J., 1949.)
.MacColl, L.A., Fundamental Теория сервомеханизмов , Нью-Йорк: Ван Ностранд, 1945.
MacFarlane, A.G.J., I. Postlethwaite, “Обобщенная стабильность Найквиста”. Критерий и многомерные корневые локусы, Int. J. Contr. , vol. 25, С. 81-127, 1977.
Максвелл, Дж. К., “Он” Губернаторы », Proc.Royal Soc. Лондон , т. 16. С. 270-283, 1868.
.Mayr, O., The Истоки управления с обратной связью , Кембридж: MIT Press, 1970.
Минорский, Н., “Направленный” Устойчивость и автоматически управляемые тела, J. Am. Soc. Nav. Eng. , т. 34, стр. 280, 1922.
Нарендра, К.С., и Р.М. Голдвин: «Геометрический критерий устойчивости некоторых нелинейных неавтономных систем», IEEE Trans. Теория схем , т.КТ-11, нет. 3. С. 406-407, 1964.
.Найквист, Х., «Теория регенерации», Bell Syst. Tech. J. , 1932.
Понтрягин, Л.С., В.Г. Болтянский, Р. Гамкрелидзе и Е.Ф. Мищенко, В Математическая теория оптимальных процессов , Нью-Йорк: Wiley, 1962.
Попов В.М., Абсолют. Устойчивость нелинейных систем автоматического управления // Автомат. Контроль , т. 22, нет. 8. С. 857-875, 1961.
Рагаццини, J.R., and G.F. Франклин, Выборочные данные Системы управления , Нью-Йорк: McGraw-Hill, 1958.
Рагаццини, Дж. Р. и Л. А. Заде, “Анализ систем выборочных данных”, Trans. AIEE , т. 71, часть II, стр. 225-234, 1952 г.
Rosenbrock, H.H., Компьютерный Проектирование систем управления , Нью-Йорк: Academic Press, 1974.
Раус, Э.Дж., Трактат об устойчивости данного состояния движения , Лондон: Macmillan & Co., 1877.
Сафонов М.Г., А.Дж. Лауб, Г.Л. Хартманн, “Обратные свойства Системы с несколькими переменными: роль и использование матрицы возвратных разностей », IEEE Пер. Авто. Продолж. , т. 26, вып. 1. С. 47-65, 1981.
Sandberg, I.W., “A” Частотное условие устойчивости систем с обратной связью, содержащих Один изменяющийся во времени нелинейный элемент, Bell Syst. Tech. J. , vol. 43, вып. 4. С. 1601–1608, 1964.
.Truxal, J.Г., АКПП Система управления с обратной связью Synthesis , Нью-Йорк: McGraw-Hill, 1955.
Вышнеградский И.А. О контроллерах. прямого действия », Изв . СПБ Технолог. Ин-т. , 1877.
Уайтхед А.Н., Наука и современный мир , Лекции Лоуэлла (1925), Нью-Йорк: Макмиллан, 1953.
Винер, Н., Экстраполяция, интерполяция и сглаживание стационарных временных рядов с инженерными приложениями , Нью-Йорк: Wiley, 1949 г.
Винер, Н., Кибернетика : или Управление и связь в Животное и машина, , Кембридж: MIT Press, 1948.
Замес Г., “О Стабильность ввода-вывода нелинейных систем обратной связи с изменяющейся во времени системой, Часть I: Условия, полученные с использованием понятий петлевого усиления, конусности, и положительность », IEEE Trans. Automatic Control , vol. AC-11, no. 2. С. 228-238, 1966.
.Замес Г., “О Стабильность ввода-вывода нелинейных систем обратной связи с изменяющейся во времени системой, часть II: Условия, связанные с кругами в частотной плоскости и секторе Нелинейности », IEEE Trans.Автоматика , т. АС-11, вып. 3. С. 465-476, 1966.
.Системы управления производственными процессами: новый подход к образованию
Несколько важных тем, связанных с управлением технологическими процессами, не получают достаточного освещения в традиционной учебной программе по химической инженерии.
Многие университетские курсы по контролю процессов не обеспечивают надлежащей подготовки выпускников химического машиностроения к их первой работе в промышленности. Большая часть содержания курсов по контролю за учебным процессом ( e.g., преобразования Лапласа, графики Боде, анализ корневого локуса, алгоритмы устойчивости Рауса / Найквиста) редко используется в промышленности и почти никогда не используется для пакетных и дискретных процессов. Вопросы управления процессами, имеющие большое промышленное значение, такие как программируемые логические контроллеры (ПЛК), распределенные системы управления (DCS), инструментальные системы безопасности (SIS), а также национальные стандарты и нормативные требования, как правило, не рассматриваются полностью (1) . Это оставляет многих новых выпускников неподготовленными к решению задач, связанных с мониторингом процессов, устранением неполадок и управлением процессами.
Большая часть студенческого курса управления процессами тратится на теорию и методы линейного управления, которые применимы к непрерывным процессам, работающим в установившемся или близком к нему состоянии. Этому шаблону подходят несколько нефтехимических процессов. Однако многие производственные процессы представляют собой дискретные или изменяющиеся во времени периодические процессы, которые требуют иных соображений, чем стационарные процессы. Периодические процессы очень распространены в химической обрабатывающей промышленности (CPI) и включают большинство фармацевтических и биотехнологических процессов, процессов производства продуктов питания и напитков (включая производство пива) и специальных химикатов ( e.г., мыла и красок) производство. Примеры дискретных процессов включают производство фармацевтических таблеток и автоматизированный контроль и упаковку конечных продуктов.
Чтобы преодолеть разрыв между потребностями отрасли и содержанием, которое преподается на курсах по управлению процессами для студентов, компаниям часто приходится отправлять новых инженеров-технологов на курсы управления поставщиками и техническим обществом; в большинстве случаев старшие сотрудники должны тратить значительное количество времени на обучение новых сотрудников, прежде чем они станут продуктивными.
В этой статье обсуждается несколько промышленно важных тем, связанных с управлением технологическими процессами, многие из которых не получают достаточного освещения в традиционной учебной программе химической инженерии. Есть надежда, что эти темы будут освещены в будущих выпусках учебников по управлению процессами и будущих лекций в курсах по управлению учебными процессами. Эта статья может помочь выпускникам инженеров-химиков узнать, чего ожидать, когда они начнут свою карьеру в промышленности.
На многих промышленных предприятиях оборудование систем управления имеет долгий срок службы, как правило, из-за больших капитальных затрат, временных затрат и производственных потерь, связанных с установкой замен.Таким образом, новые инженеры могут иногда обнаруживать контрольно-измерительное оборудование, которое используется более 20 лет. Поэтому в этой статье содержатся краткие ссылки на некоторые из старых технологий, которые все еще используются (2) .
Нормы и стандарты
Процесс определения, проектирования, внедрения и эксплуатации системы управления процессами включает в себя множество широко известных передовых практик, некоторые из которых являются требованиями для определенных отраслей. К ним относятся:
- NFPA 70, Национальный электротехнический кодекс, эталон для безопасного проектирования, установки и проверки электрического оборудования
- текущая надлежащая производственная практика (cGMP), установленная U.S. Управление по санитарному надзору за качеством пищевых продуктов и медикаментов (FDA) для фармацевтической и медицинской промышленности Стандарты
- , установленные Американским национальным институтом стандартов (ANSI), такие как стандарты для инструментальных систем безопасности (ANSI / ISA-84), управления аварийными сигналами (ANSI / ISA-18.2), управления пакетным процессом (ANSI / ISA-88), человеко-машинный интерфейс (ISA-101) и процедурная автоматизация (ISA-106)
- требований к отчетности в правилах, обнародованных Управлением по безопасности и гигиене труда США (OSHA) в отношении обучения и документации по технике безопасности, и Агентства по охране окружающей среды (EPA) в отношении аварийных выбросов опасных химикатов в окружающую среду.
При разработке новых систем управления технологическими процессами или поддержке существующих необходимо понимать и соблюдать все соответствующие местные, государственные и федеральные постановления и стандарты. Например, все измерения, связанные с безопасностью, окружающей средой или качеством продукции, должны быть идентифицированы, отслеживаться, сигнализироваться и регистрироваться, чтобы операторы могли официально отреагировать на любые возникающие инциденты, расследовать их деятельность в области здравоохранения, безопасности и окружающей среды. HSE) и / или группы контроля качества, и сообщается соответствующему руководству и государственным органам.
Аппаратное обеспечение системы управления
Рисунок 1 иллюстрирует обобщенную компьютерную архитектуру автоматизации процессов. Для реализации компьютерного управления технологическим процессом доступны три распространенных варианта: персональный компьютер (ПК), ПЛК или РСУ. Все они связаны с технологическим оборудованием (, например, датчиками и клапанами ) через подсистемы ввода / вывода (I / O). ПЛК и РСУ обычно имеют доступ к другим компьютерам, которые поддерживают работу предприятия через локальную сеть (LAN).
▲ Рисунок 1. Персональные компьютеры (ПК), программируемые логические контроллеры (ПЛК) и распределенные системы управления (РСУ) – это варианты обеспечения управления процессом для работы установки. Эти компьютерные системы взаимодействуют с технологическим оборудованием через подсистемы ввода / вывода (I / O). ПЛК и РСУ обычно взаимодействуют с другими производственными компьютерами через локальную сеть (LAN).
Персональные компьютеры. Во многих университетских курсах управления и исследовательских лабораториях для мониторинга и управления процессами используются недорогие ПК, а не промышленные системы управления.Хотя эти системы могут быть полезны для обучения и реализации базовых концепций, им не хватает промышленной жесткости, сложной функциональности и надежности промышленных систем управления. На объектах CPI системы управления часто полностью отделены от ПК и их сетей по причинам кибербезопасности. Кроме того, ПК обычно не используются для приложений, включающих строго регулируемые процессы, требующие формальной проверки, включая автоматизированные контрольные журналы и электронные подписи.
Программируемые логические контроллеры.ПЛК – это основные промышленные рабочие лошадки для управления процессами. Эти специализированные компьютеры были задуманы и разработаны несколько десятилетий назад как замена механической релейной последовательности, и в них используется метод программирования, называемый релейной логикой. Такие системы разработаны для удовлетворения большинства требований к современным системам управления промышленными предприятиями, а также для устранения ограничений компьютерных систем.
ПЛК обычно контролирует и контролирует работу машины, основного оборудования или определенной части завода.Он может контролировать и контролировать несколько сотен устройств или контуров управления. ПЛК особенно полезны для высокоскоростных операций и приложений дискретного управления, таких как управление пуском / остановом двигателей, механические приводы, робототехника, а также линии розлива и упаковки продуктов. Современные ПЛК способны управлять большими непрерывными процессами, но на крупных предприятиях они обычно используются в сочетании с РСУ.
Аварийная сигнализация, человеко-машинный интерфейс (HMI) и архиватор процесса, управляемого ПЛК, часто находятся на отдельных компьютерах от самого ПЛК.Часто многие ПЛК и HMI на предприятии разрабатывались разными поставщиками или группами инженеров. Следовательно, может быть много несоответствий в их работе, стратегиях управления и обработке аварийных сигналов. ПЛК могут быть независимыми от DCS или связаны с DCS.
ПЛКподдерживают большинство стандартных протоколов для связи с другими компьютерами, а также могут реализовывать или взаимодействовать со многими сторонними программными продуктами. Поставщики технологического оборудования часто встраивают ПЛК как часть оборудования, установленного на салазках ( e.g., – ПЛК, управляющий реактором или системой фильтрации). Прикладное программное обеспечение ПЛК, поставляемое поставщиком оборудования, часто является собственностью, поэтому допускает ограниченную настройку, если таковая имеется. Siemens, Allen-Bradley by Rockwell Automation, Mitsubishi, Schneider, Omron и Emerson входят в число нескольких поставщиков ПЛК.
Распределенные системы управления. РСУ являются крупнейшими компьютерными системами управления технологическим процессом, хотя их модульная структура позволяет изменять их размер в соответствии с потребностями конкретного завода или приложения.DCS может поддерживать все аспекты управления технологическим процессом. Обычно они применяются для мониторинга и управления целыми производственными предприятиями.
Хотя DCS могут выполнять управление процессами напрямую, некоторые из них реализованы как управляющие компьютеры, оставляя прямой контроль над оборудованием предприятия множеству базовых ПЛК, каждый из которых управляет отдельной единицей оборудования или работой единицы.
РСУобычно предлагают более широкий набор доступных настраиваемых алгоритмов управления и других функций, а также большую пропускную способность ( e.g., они могут обрабатывать больше точек ввода / вывода), чем ПЛК. Кроме того, они легче расширяются дополнительными языками программирования и специальным программным обеспечением (, например, прогнозирующим управлением модели или алгоритмами нейронной сети), чем ПЛК.
Важным преимуществом DCS является возможность создания единого HMI и среды аварийных сигналов на всем предприятии, так что операторам не нужно изучать различные HMI и системы аварийной сигнализации для разных частей предприятия. Основные поставщики DCS включают Emerson, Honeywell, Yokogawa, Schneider Electric / Foxboro, Siemens и ABB.
Обратите внимание, что важное различие между ПЛК и РСУ и другими более знакомыми компьютерами состоит в том, что ПЛК и РСУ имеют операционные системы реального времени. Это означает, что определенные операции можно настроить для выполнения в очень точное время или через определенные промежутки времени. Например, механические элементы управления могут требовать обновления каждые 50 миллисекунд или даже быстрее. Другие приложения, которые выигрывают от точного времени, включают сумматоры расхода и контроллеры пропорционально-интегрально-производной (PID) для высокоскоростных процессов.
Дополнительная информация о ПЛК, РСУ и других принципах промышленных систем управления доступна в литературе (3–5) .
Приборы и электронная связь
Инструменты, элементы управления и клапаны обычно являются отдельными объектами. Однако они общаются друг с другом посредством сигналов, передающих информацию между устройствами. Старые системы управления используют пневматические сигналы для обмена информацией между устройствами. Новые системы обмениваются информацией электрически, используя сигналы 4–20 мА или сигналы 1–5 В для представления от 0% до 100% шкалы прибора.
В системах управления, изготовленных до 1980-х годов, контроллеры представляли собой отдельные аппаратные устройства, которые иногда использовали шкалы для установки констант настройки, а иногда содержали микропроцессор. Для каждой отдельной части информации, такой как измерение давления, требовалась экранированная витая пара проводов для передачи аналогового сигнала. Каждое устройство могло отправлять или получать только один сигнал (, например, – технологическая переменная датчика или желаемое положение клапана).
Выпускники инженеров-химиков обычно знакомы с той или иной версией вышеупомянутой парадигмы.Однако современные промышленные предприятия эволюционировали так, что полевые приборы (датчики и клапаны) стали «интеллектуальными», связь была цифровой (а не аналоговой), а управление реализовано с помощью компьютеров в реальном времени.
За последние 20 лет многие так называемые интеллектуальные полевые устройства были разработаны для получения и обмена более подробной информацией, такой как бортовая аналитика, состояние устройства и информация о процессе или окружающих условиях. Например, интеллектуальный позиционер на клапане может передавать информацию о давлении подачи воздуха, величине крутящего момента, необходимого для открытия клапана, и количестве срабатываний клапана в течение срока его службы.Микропроцессор, связанный с клапаном, также может предоставить информацию об утечках, повреждении уплотнений и о том, находится ли клапан в открытом или закрытом положении. Интеллектуальные датчики могут выполнять самодиагностику и передавать информацию о неисправностях. Эта диагностика способствует созданию более интеллектуальных аварийных сигналов, повышает эффективность программ технического обслуживания предприятия и влияет на работу контуров управления. Например, ПИД-регулятор может не принять измерение давления датчика, если в датчике обнаружена неисправность.
На современных предприятиях информация от интеллектуальных устройств передается через цифровую связь по специализированным промышленным протоколам и сетям, таким как DeviceNet, Ethernet, Foundation Fieldbus, HART, Modbus и Profibus. Использование таких цифровых протоколов значительно сокращает объем необходимой полевой проводки, увеличивает объем совместно используемой информации и снижает уязвимость сигнальной проводки к радиочастотным (RF) и электромагнитным (EM) помехам.
Аналитические системы
Хотя новые инженеры обычно знакомы с традиционным контролем температуры, давления, уровня и потока, в большинстве промышленных процессов также используются датчики, такие как электрохимические зонды ( e.g., pH) и аналитических измерительных систем. Аналитические системы включают интерактивные или интерактивные инструменты химического анализа, которые часто используются для определения химического состава содержимого сосудов или проб жидкости. Примеры включают газовые хроматографы, системы высокоэффективной жидкостной хроматографии (ВЭЖХ) и различные типы спектрометров. Для некоторых приложений системы технического зрения (, например, камеры ) могут быть реализованы, если требуется визуальный осмотр продуктов.
Одной из проблем, связанных с внедрением аналитических систем, является различие в мертвом времени от сбора пробы до анализа проб и результатов.Например, пробу бульона из производственного процесса может потребоваться отфильтровать, прежде чем она будет введена в хроматограф, если присутствуют твердые частицы, а продолжительность фильтрации пробы может быть значительной и изменчивой. Это может быть проблемой, поскольку многие алгоритмы настройки контроллеров, а также определенные модели процессов требуют точного значения мертвого времени для обеспечения хорошего управления.
Еще одна проблема при внедрении аналитических систем связана с калибровкой системы. Калибровка аналитических систем требует выполнения последовательности шагов с использованием нескольких газов или растворов известной концентрации.Это более сложная процедура, чем определение настроек нуля и диапазона более традиционных датчиков.
Кроме того, аналитическим системам может потребоваться обработка и фильтрация данных и / или другие вычислительные алгоритмы для получения полезных результатов. Хроматограмма, спектр или изображение камеры, например, могут содержать тысячи необработанных точек данных, в то время как цель состоит в том, чтобы получить однозначный числовой результат.
Приборные системы безопасности
Некоторые процессы особенно опасны и должны управляться параллельной системой управления, известной как инструментальная система безопасности.SIS предназначена для перевода процесса в безопасное состояние, избегая последствий для безопасности, здоровья или окружающей среды. Примеры процессов, для которых может потребоваться SIS, включают:
- Процессы горения, включая котельные
- реакторов, в том числе с высокоэкзотермическими реакциями
- ядерных систем.
SIS обычно работают на выделенном оборудовании или специализированных ПЛК. ПСБ состоит из множества функций безопасности (ПСБ).Каждая функция SIF – это отдельная функция блокировки или отключения, которая будет принимать меры для перевода процесса в безопасное состояние. Например, реле избыточного давления может принудительно закрыть клапан подачи топлива.
Стандарт ANSI / ISA-84.00.1 устанавливает требования к спецификации, проектированию, установке, эксплуатации и техническому обслуживанию ПСБ, так что ей можно с уверенностью доверять поддержание процесса в безопасном состоянии.
Стратегии управления
Стратегии непрерывного управления обычно включают управление работой одного устройства или одного контура управления.Однако значительных улучшений технологических операций часто можно достичь с помощью более совершенных методов управления.
Расширенное регулирующее управление (ARC) объединяет несколько простых элементов управления в некоторой логической структуре. Примеры ARC включают каскадное управление, управление с прогнозированием и управление соотношением.
При каскадном управлении (рис. 2) выход первичного контроллера обеспечивает заданное значение вторичному контроллеру. Вторичный контроллер обеспечивает более быструю реакцию на нарушения технологического процесса.Каскадное регулирование часто используется в теплообменниках, где температура является переменной процесса (PV) для первичного контроллера, а расход пара – в качестве PV для вторичного контроллера. В примере, показанном на Рисунке 2, контроллер температуры (TC) обеспечивает заданное значение для регулятора расхода (FC), а выходной сигнал вторичного контроллера (CO2) определяет положение клапана.
▲ Рисунок 2. В конфигурации каскадного управления выход первичного контроллера (CO1) обеспечивает заданное значение (SP2) вторичному контроллеру.Вторичный контроллер обеспечивает более быструю реакцию на нарушения технологического процесса. Выходной сигнал контроллера вторичного контроллера (CO2) определяет положение клапана.
Управление с прямой связью (рис. 3) может быть выполнено путем добавления управляющего воздействия к стандартному контроллеру обратной связи. В примере на рисунке 3 датчик температуры (TT) и контроллер температуры (TC) выполняют функцию обратной связи. Сигнал неконтролируемой измеряемой возмущающей переменной (DV) поступает на контроллер с упреждением (FFC), который выполняет превентивное управление.Поскольку само возмущение невозможно контролировать, контроллер с прогнозированием регулирует сигнал, подаваемый на регулирующий клапан, чтобы попытаться уменьшить влияние возмущения. Это похоже на то, как водитель нажимает на педаль газа перед подъемом в гору.
▲ Рис. 3. Управление с упреждением регулирует сигнал, поступающий на регулирующий клапан (от стандартного контроллера обратной связи), чтобы уменьшить влияние возмущения. В этом случае контроллер с прямой связью (FFC) изменяет выходной сигнал контроллера на основе измеренной переменной возмущения (DV).
При регулировании соотношения (рис. 4) уставки для нескольких регуляторов потока (FC) координируются, чтобы гарантировать постоянное соотношение материалов, загружаемых в процесс. Главный сигнал потока может представлять собой общий необходимый поток, и уставка потока каждого компонента регулируется таким образом, чтобы его контроллер потока (FC) мог поддерживать правильное соотношение ингредиентов. Измерения параметров процесса для FC предоставляются датчиками расхода (FT).
▲ Рис. 4. При регулировании соотношения уставки регуляторов расхода FC1 и FC2 согласовываются, чтобы обеспечить постоянное соотношение материалов, загружаемых в процесс.
Модель управления с прогнозированием (MPC) использует математические модели динамики процесса и известные ограничения процесса для определения управляющих воздействий. Алгоритм MPC пытается максимизировать цель контроллера, манипулируя переменными в пределах огибающей ограничений. Затем MPC задает уставки регуляторов нижнего уровня. Большинство моделей MPC довольно сложны и требуют инженеров-специалистов для разработки, установки и управления их работой. Такие компании, как AVEVA, Honeywell, Aspen Technology, Cutler Technology и Shell / Yokogawa, предоставляют продукты и поддержку MPC.
Контроль производственного процесса. Периодические процессы во многих отношениях отличаются от непрерывных. Как правило, пакетные процессы изменяются во времени и нелинейны и часто включают значительные изменения нагрузки по мере выполнения процесса. В некоторых случаях это вызывает необходимость в адаптивной настройке контроллера и / или управлении с разделением диапазона. Преобразование Лапласа и методы анализа контура управления в частотной области применимы или используются редко.
Пакетные процессы используются на заводах, которые занимаются производством продукции ( i.Например, они используют одно и то же оборудование для разных продуктов), поэтому настройка оборудования, регулировка пути потока и планирование являются ключевыми проблемами. Большинство процессов не являются полностью ручными или автоматическими, а представляют собой скоординированное сочетание двух операций (что само по себе является проблемой). Может потребоваться удаленная сигнализация, поскольку операторы часто выполняют ручные операции в полевых условиях, а не в диспетчерской.
Для периодических процессов в пищевой, фармацевтической, биотехнологической и аналогичных отраслях промышленности требуются санитарные датчики и очищаемые санитарные клапаны ( e.g., дисковые или шаровые краны). Такие клапаны имеют характеристики, отличные от более традиционных регулирующих клапанов.
Управляющее программное обеспечениедолжно быть организовано в соответствии со стандартом управления пакетным процессом ANSI / ISA-88, который облегчает управление процессом посредством его различных последовательных шагов / фаз и возможных состояний (, например, простоя, пауза, прерывание).
Управление дискретными процессами. Управление дискретным процессом обычно включает операции с дискретными единицами технологического материала или конечного продукта, часто в последней части производственных операций, когда продукт помещается в отдельные контейнеры, проверяется, запечатывается, маркируется и упаковывается.Мониторинг и управление часто состоят из оборудования и технологий, отличных от тех, которые используются при создании массового продукта, таких как специальные датчики, системы технического зрения (, например, камеры ), принтеры и считыватели штрих-кодов, чипы радиочастотной идентификации (RFID) и робототехника. .
Национальные стандарты применяются к некоторым из этих технологий, например, ANSI / RIA-R15.06, который предоставляет руководящие принципы для производства и интеграции промышленных роботов и робототехнических систем с акцентом на безопасное использование, оценку рисков и безопасность персонала.Также могут применяться действующие надлежащие производственные практики (cGMP), такие как требования Управления по санитарному надзору за качеством пищевых продуктов и медикаментов США (FDA) в отношении надлежащей идентификационной маркировки фармацевтических продуктов.
Как и в случае с другими типами производственного контроля, инженерам часто приходится помогать проектным группам решить, использовать ли контроллеры производителей оригинального оборудования (OEM) или более стандартные ПЛК общего назначения. OEM-контроллеры могут хорошо подходить для конкретного приложения, но они часто являются проприетарными, представляют собой другой HMI, с которым приходится бороться инженерам и операторам, могут быть трудными в настройке и обычно требуют сторонней поддержки.Использование универсальных ПЛК может занять время и ресурсы для разработки приложений, но в остальном преодолеет ограничения OEM-опций.
Дополнительная информация о стратегиях контроля доступна в литературе (6) .
Программные средства
HMI включает в себя как аппаратное обеспечение, так и программное обеспечение, используемое оператором для управления процессом. На более старых заводах человеко-машинный интерфейс представлял собой просто кнопки, циферблаты, фонари и бумажные самописцы. В современном оборудовании HMI обычно отображается на компьютерных консолях, на которых запущено специализированное программное обеспечение.
ANSI / ISA-101 – это стандарт, помогающий разработчикам и пользователям на протяжении всего жизненного цикла HMI. Он включает соображения по проектированию HMI, требования к реализации и рекомендации по эксплуатации.
Инженеры должны научиться проверять информацию, отображаемую на экране HMI, прежде чем принимать поспешные решения. Например, отображаемый выходной сигнал контроллера – это только сигнал, отправленный на клапан. Фактическое положение клапана может сильно отличаться из-за физических ограничений, проблем с конфигурацией или других факторов.
Историки данных – это специализированные базы данных, предназначенные для сбора, хранения и предоставления информации о процессах. Крупный завод может производить более 20 000 точек данных каждую секунду. Следовательно, для некоторых аналитических приложений необходимы алгоритмы сокращения данных. Для многих пакетных процессов данные должны быть помечены номером производственной партии и, возможно, даже идентификатором этапа пакетного процесса. Некоторые историки данных могут включать программное обеспечение для составления отчетов или трендов, позволяющее оптимизировать поиск больших наборов данных.Обычно используемые архиваторы включают OSISoft PI, Aspen IP-21, AVEVA Historian (ранее Wonderware) и Canary Labs.
Инженер-химик, обслуживающий работу завода, ежедневно использует архиватор для доступа к информации о процессе. Инженер должен понимать, что менее частые методы выборки, фильтрации и сжатия данных часто используются для снижения нагрузки на сеть и требований к хранению данных. Интерпретируя эти данные, инженеры должны помнить о потере точности данных.
Программные средства моделирования контура управленияшироко используются в академических кругах. В промышленном мире существует множество типов динамики сложных процессов и множество вариаций ПИД-регулирования и других алгоритмов управления. Инструменты моделирования позволяют инженеру экспериментировать со стратегиями управления и параметрами настройки.
Пакеты специального программного обеспечения . Иногда функциональных возможностей стандартных систем управления недостаточно для удовлетворения всех требований к функциям автоматизации предприятия.В таких случаях могут быть доступны специальные пакеты программного обеспечения, часто от сторонних поставщиков, которые могут помочь удовлетворить такие требования. Примеры включают контроллеры MPC, нейронные сети, контроллеры нечеткой логики, регистраторы аварийных сигналов, базы данных управления аварийными сигналами, цифровые журналы регистрации, консультативные системы, инструменты анализа тенденций и экспертные системы реального времени (ветвь искусственного интеллекта) (7, 8) .
Следует проявлять осторожность при интеграции таких пакетов специального программного обеспечения с остальной частью системы управления.Совместимость, проверка и контроль изменений могут быть проблемами.
Управляющая способность
Настройка контура управления – это процесс выбора параметров контроллера для достижения наилучших характеристик. Наилучшая производительность выходит за рамки основных критериев стабильности и может включать критерии скорости реакции, перерегулирования, времени нарастания и / или времени установления. Большинство академических программ обучают математическим методам настройки контура, таким как метод настройки Циглера-Николса. В промышленности используется несколько различных методов.
К сожалению, в промышленном мире настройка ПИД-регулятора часто рассматривается как темное искусство, а не наука. Это может объяснить, почему до 30% промышленных контроллеров работают в ручном режиме. Способствующим фактором может быть большое количество изменяющихся во времени периодических процессов в промышленности, где оптимальные параметры настройки в начале процесса отличаются от параметров в конце процесса.
Тем не менее, программные инструменты достигли значительного прогресса в использовании науки о настройке контура на предприятии.Академический подход (bump-model-tune), безусловно, применим и до сих пор используется во многих современных программных инструментах. Программные инструменты также используют автоматизированные или полуавтоматические процессы для настройки контура с гораздо меньшим вмешательством инженера. В число поставщиков программного обеспечения для настройки контуров входят Neles Expertune, Control Station и ControlSoft.
Программное обеспечение для управления производительностью контура управления контролирует работу контроллеров на предприятии. Программное обеспечение оценивает контрольно-измерительные приборы, элементы управления, клапаны и даже технологический процесс.Диагностика гарантирует, что система управления выполняет свою работу, тем самым обеспечивая оптимальную работу процесса. Некоторые DCS имеют инструменты управления шлейфом; Помимо поставщиков таких DCS, несколько компаний, специализирующихся на управлении производительностью контуров управления, включают Neles Expertune, Control Station и PAS.
Управление нештатными ситуациями
Студенты-химики, которые проводят эксперименты по работе с установками, обычно выполняют большинство операций вручную, включая запуск и остановку процесса, мониторинг процесса и внесение любых изменений ( e.g., в режимы и уставки контроллера), если в процессе возникнут проблемы. Автоматическое реагирование на нештатные ситуации, такие как сбои в работе оборудования, сбои в процессе или ошибки оператора, редко обсуждаются.
Однако в промышленности большинство операций выполняется сконфигурированным программным обеспечением с запрограммированным рецептом, выполняемым системой управления. Возможные нештатные ситуации прогнозируются заранее с использованием стандартных инструментов и процедур, таких как анализ опасностей и работоспособности (HAZOP) и анализ видов и последствий отказов (FMEA).Цель FMEA – минимизировать последствия отказов компонентов или систем, снизить частоту их возникновения и улучшить их обнаруживаемость. Результаты HAZOP и FMEA обычно приводят к дополнительным процедурам и этапам в рецептах контроля процесса. Фактически, нередко большая часть рецептов управления посвящена управлению нештатными ситуациями – важной части управления процессом.
Промышленное управление включает в себя серьезные размышления об управлении нештатными ситуациями и может включать добавление соответствующих программных блокировок, выполнение автоматических действий для обхода нормального управления, отображение возможных основных причин аварийного сигнала на консоли оператора и отображение предварительно запрограммированных советов для операторов относительно того, какие действия брать.
В некоторых случаях управление нештатной ситуацией может требовать, чтобы рецепт управления процессом автоматически отправлял производственный процесс в другое состояние (, например, удержание, пауза или прерывание), в зависимости от ненормальной ситуации. Стандарт ANSI / ISA-88 рекомендует такие методы управления нештатными ситуациями для пакетных процессов.
Управление сигнализацией
Частью управления нештатными ситуациями является генерация сигналов тревоги. Современные системы управления поддерживают множество различных типов аварийных сигналов ( e.г., высокое, низкое, отклонение, статистическое). Когда они применяются неправильно или чрезмерно, сигналы тревоги могут мешать работе или создавать путаницу. Проблемы управления аварийными сигналами способствовали возникновению крупных бедствий, получивших широкую огласку, таких как аварии на Чернобыльской АЭС и АЭС Три-Майл-Айленд, разливы нефти Deepwater Horizon и Exxon Valdez, выброс химикатов в Бхопале и пожар на нефтеперерабатывающем заводе в Техас-Сити. Передовые практики и требования к управлению аварийными сигналами многочисленны и изложены в таких стандартах, как ANSI / ISA-18.2, «Управление системами сигнализации для обрабатывающих производств» (9) и его международный эквивалент, IEC 62682.
Общие проблемы системы аварийной сигнализации включают отсутствие определенной философии аварийной сигнализации на предприятии, настройку резервных аварийных сигналов, использование системы аварийных сигналов для уведомлений в дополнение к ненормальным ситуациям, отсутствие установки атрибутов аварийных сигналов на соответствующие значения и отсутствие приоритетов аварийных сигналов. Все эти общие проблемы способствуют генерации ложных сигналов тревоги, которые могут вызвать информационную перегрузку операторов во время реальных сбоев в работе оборудования.Тревоги могут быть намеренно или случайно отключены разными способами, что создает еще больший риск.
Для правильного управления аварийными сигналами требуется группа представителей завода, знающих производственный процесс, для выполнения рационализации аварийных сигналов. Команда должна согласовать, какую опцию или числовое значение установить для каждого из атрибутов (, т.е. свойств) каждого сигнала тревоги, который будет сконфигурирован в системе, и задокументировать свои решения в основной базе данных сигналов тревоги. Атрибуты включают уставку, приоритет, класс, тип, зону нечувствительности, временную задержку и статус подавления.Подавление может быть важным, например, для пакетных процессов, в которых сигнал тревоги требуется для некоторых этапов пакетной обработки, но не для других. Некоторые атрибуты могут быть функцией шага пакетного процесса, поэтому они могут иметь различную уставку и / или приоритет для разных шагов пакетного процесса.
Некоторые требуемые функции системы сигнализации могут быть недоступны как стандартные функции в системе управления, поставляемой поставщиком, поэтому может потребоваться некоторая настройка или интерфейс для сторонних продуктов (, например, регистраторы сигналов тревоги ).Внимание к управлению аварийными сигналами необходимо в самом начале проекта и должно быть включено в функциональные требования; при поставке системы управления об этом не следует думать позже.
Системы управления производством
Большинство крупных заводов имеют системы управления производством (MES), которые поддерживают управление производственными операциями. Эти системы, работающие не в режиме реального времени, обычно управляются отделом информационных технологий (ИТ) компании. Такие системы отвечают за планирование операций завода и иногда являются домом для основных рецептов управления технологическим процессом (или частей рецептов, таких как списки ингредиентов), которые управляют работой завода.Они также часто содержат репозиторий партийных записей, необходимых для документирования конкретных материалов, используемых в производственной партии, документирования расследований отклонений и поддержки выпуска продукта, чтобы его можно было продать.
Поскольку MES дополняют использование систем управления технологическим процессом (, например, DCS), MES и компьютеры управления производственным процессом часто подключаются в соответствии со стандартом ANSI / ISA-95.
Документация
Новому инженеру нужно будет научиться читать, интерпретировать и изменять многие типы документации системы управления.Хотя большинство выпускников знакомы со схемами технологического процесса (PFD) и схемами трубопроводов и КИП (P & ID), документация по промышленному контролю также может включать:
- Функциональные требования и технические характеристики системы
- контрактов с фирмами, занимающимися проектированием, закупками и строительством (EPCM)
- Контрольные повествования
- Основные принципы валидации и аварийной сигнализации
- основные базы данных аварийных сигналов
- процедур ( например, контроль изменений)
- производство билетов
- Технические характеристики прибора
- Схемы трубопроводов
- Чертежи электропроводки
- логические схемы
- Схемы контуров управления
- схемы сети Заводские приемочные испытания
- и приемочные испытания на объекте.
Многие из них – это не просто проектно-техническая документация, а рабочая документация, требующая обновления, чтобы отразить текущее состояние завода как построенного объекта.
Заключительные мысли
Хотя академическая среда дает инженерам-химикам твердое представление о теории линейного управления, остается значительный разрыв между этим аспектом управления процессами и гораздо более широким спектром оборудования для управления промышленными процессами, программного обеспечения, требований, передовых методов, технологий и проблем. с которым столкнется новый выпускник, приступив к своей первой работе в промышленности.Пробел в знаниях включает многие темы, упомянутые в этой статье, в том числе несколько национальных стандартов и нормативных требований, которые необходимо учитывать при разработке и поддержке систем управления производственными процессами.
Новым выпускникам, которые получают задание в области технологического проектирования, следует стремиться найти подходящие ресурсы (, например, Ссылка 10) и наставников в производственной среде, а также получить информацию и пройти обучение по существующим системам и процедурам управления предприятием, а также всем применимым нормативным требованиям. требования и передовой опыт.Новый выпускник может также рассмотреть возможность посещения некоторых из множества отличных курсов по управлению технологическим процессом, предлагаемых техническими обществами, такими как AIChE и Международное общество автоматизации (ISA).
Цитируемая литература
- Алфорд Дж. И Т. Эдгар, «Подготовка студентов-химиков для промышленности», «Прогресс химической инженерии», 113 (11), стр. 25–28 (ноябрь 2017 г.).
- Бакби, Г. и Дж. Алфорд, «Приложения автоматизации в биофармацевтике», ISA, Research Triangle Park, NC (2008).
- Сэндс, Н. и И. Верхаппен (ред.), «Руководство по совокупности знаний по автоматизации», ISA, Research Triangle Park, Северная Каролина (2018).
- Whitt, M., «Успешное проектирование контрольно-измерительных приборов и систем управления», ISA, Research Triangle Park, NC (2012).
- Бакби, Г. К., «Основы управления процессами», ISA, Research Triangle Park, Северная Каролина, ISBN: 978-1-64331-130-2 (ожидается в начале 2021 года).
- Макмиллан, Г. К. и П. Х. Вегас, «Справочник по технологическим / промышленным приборам и средствам управления», 6-е изд., McGraw-Hill Education, Нью-Йорк, Нью-Йорк (2019).
- Алфорд, Дж., и др., «Реальные награды от искусственного интеллекта», Intech, 46 (4), стр. 52 (апрель 1999 г.).
- Алфорд, Дж., и др., «Онлайн-приложения экспертных систем; Использование в ферментационных заводах », Intech, 46 (7), стр. 50 (июль 1999 г.).
- ANSI / ISA-18.2 «Управление системами сигнализации для обрабатывающих производств», ISA, Research Triangle Park, NC (2016).
- Риггс, Дж. Б., и др., «Контроль химических и биотехнологических процессов», 5-е изд.