
Гироскоп или акселерометр? – ITC.ua
После выхода iPhone 4 многие много внимания было уделено новому дисплею, корпусу и прочим важным вещам. И лишь мимоходом отметили замену акселерометров на гироскопы для улучшения управления в играх. В своей статье для «Компьютерного обозрения» я отметил этот момент, в следствие чего даже консультировал одного из читателей. Почему бы не уделить этому моменту внимание и не разобраться зачем одни датчики были заменены на другие и чем они собственно отличаются?
Начнем с того, что и акселерометры и гироскопы являются инерционными датчиками. Акселерометры (лат. accelero — ускоряю и μετρέω — измеряю) — приборы, предназначенные для имерения проекции кажущегося ускорения.
Простейшая модель акселлерометра
В данном случае русская Википедия дает на удивление неплохое определение. В случае с мобильными телефонами датчики реагировали на изменение вектора ускорения свободного падения и все последующие действия исходили из этого.
Условная схема определения положения устройства в пространстве с применением двух акселлерометров
Точность в результате была довольно низкой, так как угол поворота устройства в пространстве напрямую измерить таким образом невозможно, лишь примерно оценить. На практике это выражалось в задумчивости поворота экранов, ложных срабатываниях и т.д. Какие же преимущества дает гироскоп и чем он собственно отличается?
Определение на Вики настолько далеко от общего, что обратимся к первоисточнику.
Впервые определение гироскопу дал Леон Фуко, назвавший так свой прибор, с помощью которого он наблюдал суточное вращение Земли. В Большой Советской Энциклопедии приводится следующее «Гироскоп — быстро вращающееся твердое тело, ось которого может изменять свое направление в пространстве». В современных гироскопах могут происходить разнообразные физические процессы, не обязательно основанные на вращении твердого тела. Хотя и классические гироскопы все еще применяются.
Примеры гироскопов. Банальный волчок по своей природе является гироскопом.
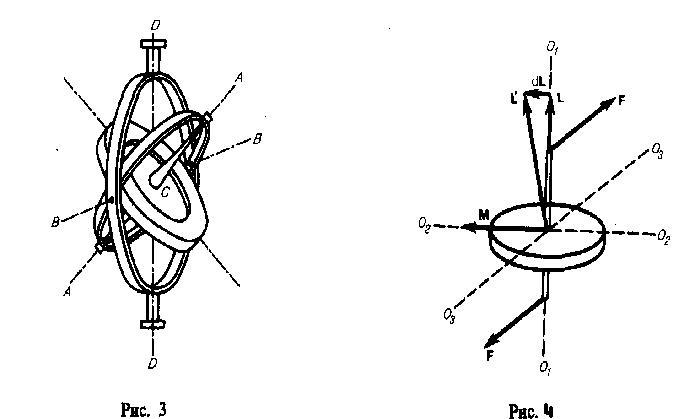
Примером классического гироскопа является ротор в кардановом подвесе. При вращении ротора он будет сохранять неизменным свое положение в пространстве независимо от движения основания. Таким образом можно измерять угол поворота основания, а соответственно и корабля/самолета etc. Именно по гирокомпасам ходят суда и летают самолеты, не полагаясь на примерные показания магнитного компаса, особенно в полярных широтах, а данные о положении самолета в пространстве получаются с гировертикали и гирогоризонта.
Естественно, классический гироскоп не может применяться в электронике. Для этого используются вибрационные микромеханические гироскопы — датчики угловой скорости. Чувствительный элемент таких приборов закреплен, при попытке его поворота возникает кориолисова сила, пропорциональная угловой скорости. Не вдаваясь в подробности работы, которые вряд ли будут кому-то интересны скажем, что выходным сигналом ДУС является напряжение, пропорциональное угловой скорости. Такие датчики имеют небольшие габариты (около 10x10x2 мм) и могут быть легко интегрированы в печатную плату.
Такие датчики имеют небольшие габариты (около 10x10x2 мм) и могут быть легко интегрированы в печатную плату.
Мировым лидером в производстве таких датчиков является компания Analog Devices, датчик которой изображен на рисунке. Можно с большой долей вероятности утверждать, что именно датчики этой компании установлены в iPhone 4.
Преимущества очевидны. В любой момент времени можно знать положение телефона в пространстве. В играх для управления можно использовать не только поворот устройства, но и скорость поворота, что позволяет организовать более точное и реалистичное управление.
Надеюсь, этот небольшой экскурс в теорию и практику гироскопов вас не утомил, а лишь еще раз подчеркнул, что современный мобильный телефон крайне сложное устройство, в котором применяются технологии ранее доступные только авиационной и космической промышленности. А мы тем временем не брезгуем ими открывать пивные бутылки.
Изображения датчиков взяты с сайта представительства Analog Devices в СНГ и странах Балтии
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.
 3 до 5.0 В
3 до 5.0 В3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
Использование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера “Трекдуино”.
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
 Допустимые значения:
Допустимые значения: Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0».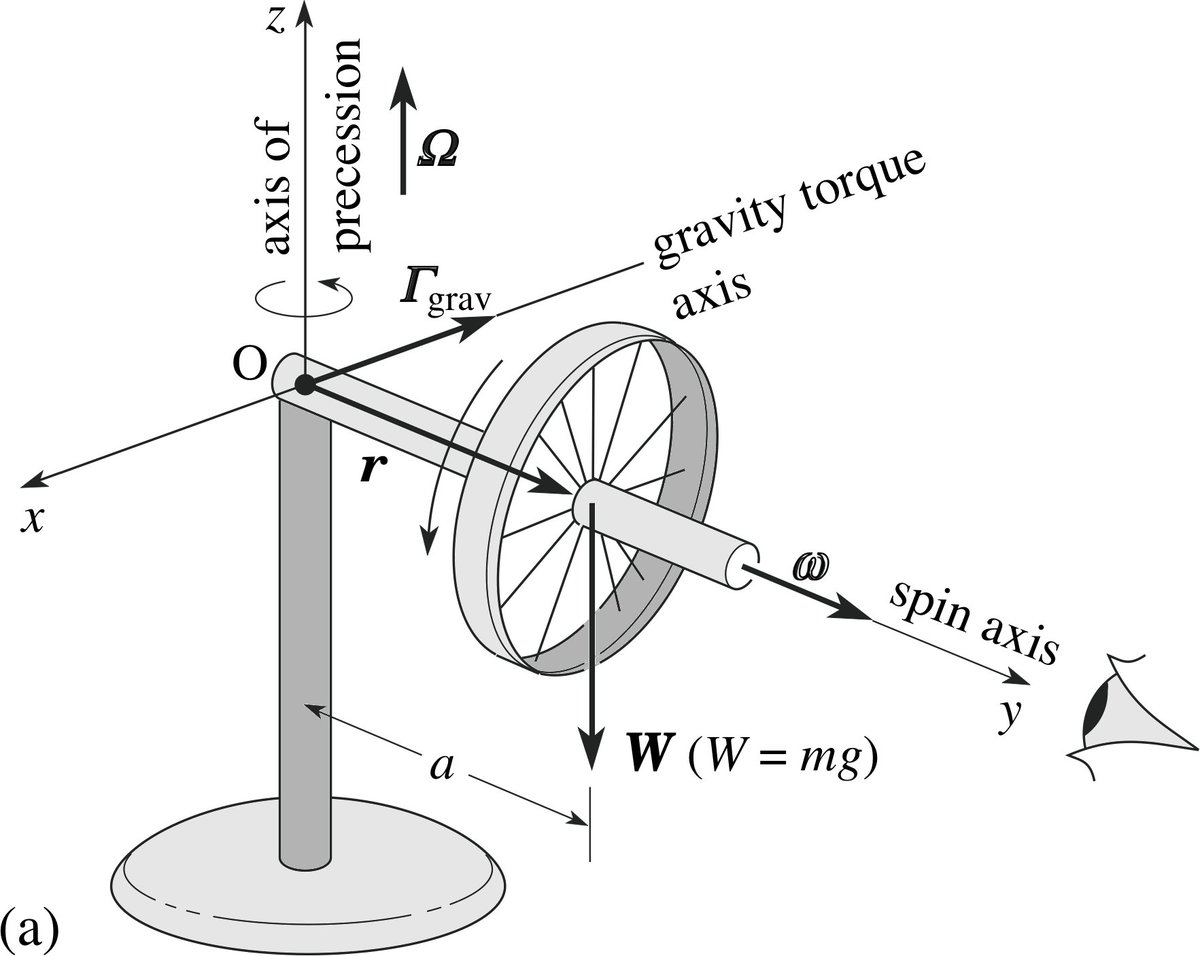
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
Чем отличается гироскоп от акселерометра
Многие из современных мобильных гаджетов — смартфонов и планшетов — оснащены гироскопами и акселерометрами. Что это за аппаратные компоненты?
Что это за аппаратные компоненты?
Что такое гироскоп?
Гироскоп, встраиваемый в мобильный гаджет, это небольшое устройство, способное определять собственный (а значит, и того девайса, на котором оно размещено) угол наклона относительно земной поверхности и передавать соответствующие координаты в то или иное приложение. Например — в игру, установленную на смартфоне либо планшете или иной вид ПО. Использование приложениями данных с гироскопа дает возможность пользователю эффективно управлять интерфейсом девайса или, например, игровыми персонажами.
Гироскопы — это девайсы, которые находят самое широкое применение не только в индустрии мобильных решений, но и в иных сегментах рынка электронных устройств, а также в автомобильной, аэрокосмической промышленности. Принцип их работы вне зависимости от сферы применения одинаковый — они используются для определения положения объекта относительно земной поверхности.
к содержанию ↑Что такое акселерометр?
Акселерометр в мобильном гаджете — это устройство, позволяющее измерять собственное (а значит, и того девайса, на котором оно размещено) ускорение. Даже если длина «разгона» составляет миллиметры. Как и гироскоп, акселерометр, инсталлированный на смартфоне или планшете, может передавать сведения об ускорении в игру или приложение. При этом соответствующий сигнал призван выполнять, в принципе, ту же функцию, что и в случае с задействованием гироскопа — он помогает программе, работающей на гаджете, определить свое положение относительно земной поверхности.
Даже если длина «разгона» составляет миллиметры. Как и гироскоп, акселерометр, инсталлированный на смартфоне или планшете, может передавать сведения об ускорении в игру или приложение. При этом соответствующий сигнал призван выполнять, в принципе, ту же функцию, что и в случае с задействованием гироскопа — он помогает программе, работающей на гаджете, определить свое положение относительно земной поверхности.
Вместе с тем у акселерометра есть одно важное преимущество — измерение ускорения позволяет устройству весьма точно вычислять расстояние, на которое оно перемещено в пространстве. Поэтому мобильный гаджет с акселерометром можно использовать, к примеру, как шагомер.
Способность акселерометра измерять ускорение исключительно полезна для работы систем защиты некоторых электронных устройств от последствий падения или неудачной «перепасовки» одним пользователем другому. Подобные системы могут устанавливаться на жестких дисках ноутбуков: если они обнаруживают, что винчестер куда-то летит, то временно блокируют его записывающую головку — самый хрупкий элемент. Если жесткий диск все же упадет, то сохранится шанс на то, что его кластеры останутся в целости.
Если жесткий диск все же упадет, то сохранится шанс на то, что его кластеры останутся в целости.
Сравнение
Главное отличие гироскопа от акселерометра — в принципах работы данных аппаратных компонентов. Первый вычисляет свой угол наклона относительно земли, второй подсчитывает собственное ускорение — но, опять же, относительно земной поверхности. На практике обе функции могут в ряде случаев заменять друг друга или же удачно дополнять. Поэтому многие мобильные девайсы оснащаются как акселерометром, так и гироскопом.
Вместе с тем у акселерометра есть ряд возможностей, недоступных для гироскопа. В частности — формирование сигналов, позволяющих определить расстояние, пройденное пользователем мобильного устройства.
Определив то, в чем разница между гироскопом и акселерометром, зафиксируем ее ключевые критерии в таблице.
к содержанию ↑Таблица
| Гироскоп | Акселерометр |
| Что между ними общего? | |
| Оба устройства позволяют определить их положение относительно земли, а также того гаджета, в котором они инсталлированы, и могут задействоваться в этих целях одновременно | |
| В чем разница между ними? | |
| Определяет собственный угол наклона относительно земли | Определяет ускорение относительно земной поверхности |
| Не может использоваться в целях измерения длительности перемещения устройства | Может применяться для измерения длительности перемещения устройства |
Выбор и использование датчиков движения на основе МЭМС
Статья посвящена системам обработки движения.
Обработка движения — новая прорывная технология, с которой начнется волна инноваций в проектировании карманных потребительских устройств, пользовательского интерфейса и систем управления. Эта технология предполагает детектирование движения в трехмерном пространстве, измерение параметров (скорости, угловой скорости, направления, ускорения, момента и т.д.) и передачу данных в процессор. С появлением коммерческих устройств инерциального измерения (IMU — inertial measurement unit), основанных на МЭМС, развитие обработки движения стало идти еще быстрее. Устройства IMU, оснащенные инструментами обработки движения, обеспечивают более простой пользовательский интерфейс (интуитивная навигация) и управление устройством без нагромождения операций и меню.
Распознавание движения
В некоторых современных мобильных устройствах используются акселерометры, измеряющие параметры движения по трем осям. Этого недостаточно, поскольку по трем осям можно разложить только поступательное или только вращательное движение. Для полноценной обработки необходимы шесть осей измерения.
Рис. 1. Механизм возникновения силы Кориолиса |
Вибрационные гироскопы стержневого типа обычно содержат пару вибрирующих масс, например, в форме стержней (как ветви камертона), которые осциллируют с одинаковой амплитудой и в противоположных направлениях.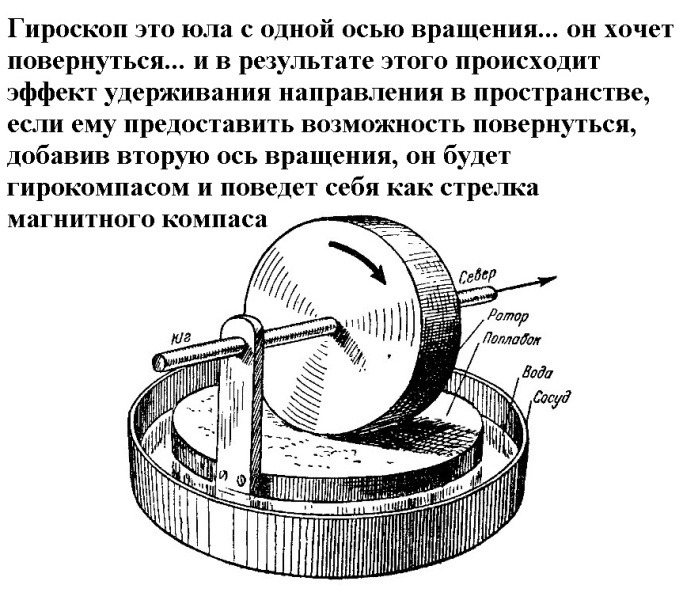 Когда гироскоп начинает вращаться, возникает сила Кориолиса, направленная перпендикулярно вектору скорости и пропорциональная его модулю. Величина скорости измеряется емкостным способом между зубьями гребенки по периметру вибрирующей структуры и зубьями неподвижной рамки, окружающей стержни. Гироскоп проектируется так, чтобы возникающее в нем ускорение Кориолиса было максимальным, а трение — минимальным.
Когда гироскоп начинает вращаться, возникает сила Кориолиса, направленная перпендикулярно вектору скорости и пропорциональная его модулю. Величина скорости измеряется емкостным способом между зубьями гребенки по периметру вибрирующей структуры и зубьями неподвижной рамки, окружающей стержни. Гироскоп проектируется так, чтобы возникающее в нем ускорение Кориолиса было максимальным, а трение — минимальным.
Для коррекции погрешности измерения параметров вращательного движения некоторые производители вместо гироскопов используют магнитометры.
 Эти устройства определяют вращательное движение устройства по отношению к северному магнитному полюсу Земли. Они обычно применяются для переориентации карты на дисплее, чтобы ее положение соответствовало направлению движения пользователя.
Эти устройства определяют вращательное движение устройства по отношению к северному магнитному полюсу Земли. Они обычно применяются для переориентации карты на дисплее, чтобы ее положение соответствовало направлению движения пользователя. Магнитометры работают сравнительно медленно, поэтому они не подходят для использования в системах, вращающихся с частотой более 5 кГц. Кроме того, они не защищены от искажения данных в присутствии внешних магнитных полей, создаваемых, например, микрофоном, аудиогарнитурой или металлическим предметами.
Гироскопы — единственные инерционные датчики, позволяющие точно и без задержки измерить параметры вращательного движения. Они не подвержены никаким внешним воздействиям, в том числе магнитным и гравитационным. Появление кремниевых гироскопов на основе МЭМС и снижение их стоимости позволило существенно расширить функциональность мобильных устройств. Помимо доступной цены, гироскопы на основе МЭМС имеют другие достоинства: малый размер и высокую точность.
Выбор датчика
Для определения всех параметров движения необходимо проводить измерения по трем осям поступательного и трем осям вращательного движения. Среди разработчиков портативных устройств бытует неверное представление, что для системы обработки движения нужно использовать либо гироскопы, либо акселерометры. На самом деле, для качественного измерения скорости и направления поступательного и вращательного движения необходимы оба вида датчиков.
Гироскопы в одиночку могут использоваться для измерения вращательной компоненты. Системы на основе датчиков ускорения могут использоваться в приложениях с неподвижной системой координат, а также для измерения угла поворота или параметров поступательного движения. Другими словами, они подходят только для тех случаев, когда система не совершает свободного вращения. Для одновременного анализа поступательного и вращательного движения необходимы и гироскоп, и акселерометр. Датчики ускорения имеют большую точность измерения, когда устройство покоится, а МЭМС-гироскопы — когда оно движется. Для объединения данных, полученных от датчиков, обычно используется алгоритм обработки данных из разных источников (см. рис. 2).
Рис. 2. Алгоритм объединения данных |
При выборе способа обработки движения следует проводить тщательный анализ многих факторов, включая полный диапазон работы устройства, чувствительность, напряжение смещения, шумовые характеристики, чувствительность между осями, влияние температуры, влажности и механическую прочность устройства.
Обработка движения
При разработке системы детектирования и обработки движения первое, с чем сталкивается инженер, это выбор модели датчика ускорения, гироскопа или интегрального решения для своего приложения. У каждого подхода есть свои достоинства и недостатки. Рассмотрим некоторые соображения совместимости, которые следует учитывать.
1. Для максимального расширения функциональности в схеме следует предусмотреть несколько приложений, например, навигатор GPS, помощник водителя и интуитивный интерфейс пользователя, управляемый жестами. Для работы всех этих приложений требуются различные скорости выборок гироскопа, поэтому необходимо предусмотреть защитные меры, чтобы данные разных приложений не накладывались друг на друга.
2. Достоверность вычисления угловых координат в значительной мере зависит от стабильности тактирования гироскопа.
3. Акселерометры и гироскопы должны делать выборки синхронно, чтобы правильно интерпретировать их и определить положение устройства в пространстве.
4. Частоты, на которых работают гироскопы, не должны интерферировать друг с другом, а также с другими каналами, использующимися в устройстве.
Обычно акселерометры и гироскопы классифицируются по техническим характеристикам, однако во многих случаях их лучше разделять по назначению. Пример соответствующей классификации приведен в таблице 1. В последней колонке указан полный диапазон работы гироскопа в градусах в секунду (dps — degree per second) и соответствующая чувствительность (мВ/dps). Характеристики цифровых датчиков ускорения, которые обычно применяются в системах обработки движения, выражаются, как правило, долями гравитационного ускорения, а чувствительность измеряется в единицах [младший значащий разряд/g].
Таблица 1. Классификация гироскопов по назначению
Назначение | Чувствительность гироскопа, мВ/dps | Полный диапазон измерений, dps |
Стабилизация изображения | 20…50 | 20…43 |
Навигация | 4…15 | 50…67 |
3-D удаленное управление | 2,0 | 500 |
Фильтрование
Обычно для обработки движения требуется гибкая система фильтрования. Шумовые характеристики и полоса сигнала, как правило, меняются в зависимости от производимого в данный момент действия. Существуют два основных метода фильтрования: аналоговый (фильтр на основе АЦП или RC-цепи) и цифровой (производится в процессоре после АЦП). Аналоговый фильтр применяется обязательно для предупреждения наложения данных. Для задач обработки движения, в которых полоса сигнала меняется, оптимальный выбор — включить программируемый цифровой фильтр после аналогового.
Мобильные устройства, оснащенные функцией обработки движения, имеют дополнительные функции, такие как стабилизация изображения в камере, пользовательский интерфейс, навигация. Для них требуются полосы частот. Например, для получения навигационных сигналов с частотой до 1 Гц частота выборки должна быть 10 Гц, а полоса пропускания фильтра согласно правилу Найквиста (отсечение всех сигналов, частота которых не меньше половины частоты дискретизации) составляет менее 5 Гц. Однако этот фильтр может создавать помехи в других приложениях, реализованных в устройстве. В связи с этим необходимо использовать такой фильтр, полоса которого покрывает все диапазоны фильтрации, требуемые приложениями, и цифровой фильтр, который будет подстраиваться под требования конкретного приложения.
Если схема обработки движения не интегральная (см. рис. 3), то может потребоваться МК для осуществления выборок. В полностью интегральных решениях (см. рис. 4) в состав блока АЦП обычно входят фильтры заданных частот. За ними следуют цифровые фильтры, которые используются в случае необходимости.
Рис. 3. Структура системы обработки движения с дискретными датчиками |
Рис. 4. Интегральная схема обработки движения |
Точность тактирования
Точность тактирования очень важна, особенно при определении угловых координат гироскопа, которые вычисляются путем перемножения угловой скорости на частоту дискретизации:
α = ω .ΔТ, (1)
где α — данные, полученные от гироскопа; ω — угловая скорость гироскопа; ΔТ — промежуток времени. Из выражения (1) видно, что правильность тактирования гироскопа так же важна, как и точность определения угловой скорости.
Синхронизация данных
Поскольку современные мобильные устройства оснащены не одним датчиком, то важно синхронизовать получение данных от разных датчиков. Самая высокая точность может быть получена тогда, когда данные с акселерометра и гироскопа считываются синхронно. Однако, если у них разные требования по тактированию, этот процесс усложняется.
Существуют и другие методики, например, сбор данных с цифрового датчика ускорения через интерфейс I2C. Этот метод не подходит для аналогового гироскопа. В этом случае преимущество имеют законченные интегральные решения, в которых заведомо гарантируется синхронность сбора данных.
Частотный диапазон
Разработчик должен проверить, что частотные спектры в системе не перекрываются. Например, гироскопы, работающие в диапазоне звуковых частот ниже 5 кГц, не следует использовать вблизи источников звука — телевизоров, радио, громкоговорителей и т.д. Наушники обычно работают в диапазоне 20 Гц…20 кГц, а оптическая стабилизация изображения — на частотах 500 Гц…4 кГц. В системах обработки движения компании InvenSense используются более высокие частоты: по оси Х — 24 кГц, по оси Y — 27 кГц, по оси Z — 30 кГц. Таким образом, диапазоны работы отдельных блоков не накладываются друг на друга.
Заключение
Несмотря на то, что в настоящее время датчики движения представлены на рынке в большом разнообразии, с развитием систем обработки движения предпочтение будет отдаваться полностью интегральным решениям.
Литература
1. Steve Nasiri, David Sachs and Michael Maia. Selection and integration of MEMS-based motion processing devices//www.dspdesignline.com/howto/218401101#.
рецепты приготовления для систем позиционирования / Блог компании RealTrac Technologies / Хабр
В этой заметке мы поговорим об инерциальных датчиках. О том, что они измеряют и о том, как эти физические величины можно использовать.
Большинство современных мобильных телефонов имеют на борту триады акселерометров, гироскопов и магнитометров, часто в дополнение к ним ставится и датчик атмосферного давления.
С последним датчиком все предельно ясно: почти у каждого из нас дома или на даче висит барометр и миллиметры его ртутного столба прочно связаны с дождем, непогодой и общим самочувствием любимой бабушки. А вот что измеряют акселерометр, гироскоп и магнитометр, и как использовать эту информацию для определения ориентации устройства в пространстве?
Акселерометр
В википедии сказано, что акселерометр — это прибор, измеряющий проекцию кажущегося ускорения. Типичный акселерометр состоит из трех взаимно перпендикулярных измерительных осей, регистрирующих гравитационное и линейные ускорения.
С помощью измерений трехосного акселерометра можно определить его ориентацию относительно опорного вектора, которым в данном случае является гравитационное ускорение. Тогда, однако, ориентация будет разрешена не полностью — останется неопределенность относительно угла поворота вокруг оси, параллельной направлению ускорения свободного падения.
Подробнее это пояснено на рисунке ниже. Представим, что в нашем распоряжении есть измерительное устройство с акселерометром, имеющим три оси X, Y и Z. На рисунке данные оси обозначены красным, зеленым и синим цветом и образуют левую тройку векторов. Очевидно, что если для определения ориентации доступен только вектор ускорения свободного падения, то будет существовать бесконечное число возможных ориентаций измерительного устройства, при которых ось Z акселерометра будет измерять значение ускорения свободного падения, но разрешить абсолютную ориентацию устройства мы не сможем.
Магнитометр
Чтобы разрешить ориентацию полностью, нужен второй базисный вектор, который не будет параллелен первому. Таким вектором может являться, например, вектор магнитного поля нашей планеты. Если известно его направление, то ориентация будет разрешена однозначно.
Зная ориентацию одной системы координат относительно другой становится возможным переводить измерения из системы координат устройства в глобальную. А знания об ускорениях в глобальной системе координат позволят путем интегрирования восстановить скорость и получить информацию об относительном местоположении.
Гироскоп
Гироскоп позволяет измерить скорость вращения устройства, соответственно для того, чтобы привести скорость к углу поворота мы должны её интегрировать. С этим положением связана основная проблема ориентации только при помощи гироскопа — из-за постоянного интегрирования не совсем точных измерений угловых скоростей, вызванных смещением нуля или температурными эффектами, мы получим дрейф ориентации, или, другими словами, она будет “уплывать” от истинного значения.
Преимущество использования всех трех датчиков в фильтре ориентации кроется в том, что:
- Благодаря измерениям гироскопа становится возможной одновременное подавление скачков ориентации с сохранением реактивности фильтра, фактически мы получаем аналог низкочастотного фильтра без какой-либо задержки, при визуализации наблюдается “плавность” при вращении объекта. Хороший фильтр для быстрого старта — фильтр Мадвика, но на мой взгляд, еще более интуитивным является фильтр Махони, так как в нем ошибка ориентации рассчитывается не с помощью градиента, а путем простого векторного умножения.
Подобные фильтры можно использовать и для объединения измерений пар датчиков. Например, на следующем рисунке показан результат оценки высоты с использованием фильтра Калмана, где в качестве измерений используются данные об атмосферном давлении, а в качестве внешнего воздействия — измерения акселерометра. Кстати на хабре есть подобное решение, там акселерометр и барометр используют для стабилизации высоты квадрокоптера. - Становится возможным включение в вектор состояния системы параметров датчиков: таких как смещение нуля акселерометра и гироскопа. Используемые фильтры, построенные на базе комплементарных или фильтра Калмана, постепенно сходятся к истинному значению смещения нуля датчика.
- Можно эффективно организовать сбор калибровочных данных. Так, при сборе калибровочных данных для магнитометра для максимально равномерного покрытия поверхности шара можно использовать данные об ориентации устройства и инициировать процесс калибровки только после того, когда все требуемые сегменты шара будут содержать как минимум одно измерение.
- Появляется возможность в той или иной мере разрешить основные проблемы при определении ориентации: оценить направление внешнего ускорения или определить, присутствует ли в данной точке локальное магнитное возмущение, а значит, не следует доверять измерениям магнитометра.
Как можно еще использовать данные от инерциальных датчиков?
Помимо традиционной и хорошо изученной задачи определения ориентации устройства, инерциальные датчики могут использоваться для:
- Сбора данных о магнитной карте помещения. Пример такой карты приведен на рисунке ниже. Видно, что в различных частях здания изменяется не только магнитуда магнитного поля (в мкТл), но и направление вектора магнитной индукции (обозначено розовой линией). Такую карту можно использовать для уточненного позиционирования объекта в дополнении к традиционным картам радиосигнала.
Восстановления траектории движения объекта. Таким объектом может быть пешеход или автомобиль. В отдельных случаях, например при креплении устройства на ноге и предварительной точной калибровке датчиков можно добиться ошибки возврата в точку начала движения, не превышающую десятков сантиметров для длины пути превышающей 100 метров. Пример восстановленной траектории методом ZUPT(при сбросе ошибки в периоды неподвижности), дополненным измерениями датчика атмосферного давления приведен на следующем рисунке (траектория движения включала в себя проход по коридору, спуск по лестнице, еще один проход и подъем на лифте). Подобный метод уже упоминался на хабре здесь.
При произвольном креплении устройства на теле человека ошибка возврата к исходной точке, как правило, куда больше и составляет 15-20% от пройденной дистанции. Такое её значение обусловлено, во-первых, ошибкой в определении длины шага, а во-вторых, ошибкой в определении направления движения.
Инициирования каких-либо событий или управления устройством. Это возможно сделать при помощи “рисования” устройством какой-либо фигуры или образа в воздухе, например символ ∞ может использоваться для запуска калибровки магнитометра, продольные взмахи устройством — для генерации экстренного сообщения, тройной “тап” — для выключения. Данные задачи решаются при помощи заранее обученных классификаторов.
- Определения текущей активности пользователя. Например, при использовании устройств в офисе может быть полезным знание о том, насколько много человек двигался в течение рабочего дня и типе движения — какую часть времени он провел стоя, сидя, сколько времени потратил на различные переходы по зданию.
В будущих статьях планируется раскрыть темы того, как работать с инерциальными датчиками — обсудить способы их калибровки (хотя это уже и обсуждалось на хабре), посмотреть на существующие способы восстановления траектории движения человека, изучить подходы к детектированию и устранению возмущений магнитного поля, а также обсудить архитектуру встроенного ПО для своевременного таймштампирования и обработки их измерений.
Автор — Александр Миков.
Новости / Служба новостей ТПУ
Ученые Томского политехнического университета разработали первые российские датчики для автономной навигации беспилотников, сочетающие в себя сразу три функции. При этом они удароустойчивые и могут работать при экстремальных температурах.
Фото: в «чистой лаборатории» ТПУ«Сегодня практически на любых подвижных объектах — от смартфона до дрона — используются микроэлектромеханические (МЭМС) датчики, размеры которых измеряются микрометрами. Они отвечают за автономную ориентацию объекта в пространстве без связи со спутником. Зарубежные компании выпускают такие датчики на десятки миллиардов долларов в год, в России этот рынок менее развит. Кроме того, не на все объекты можно поставить импортные датчики. Поэтому сейчас в России высока потребность в собственных датчиках», — говорит руководитель исследования, доцент отделения электронной инженерии ТПУ Тамара Нестеренко.
Специалисты ТПУ создали интеллектуальный инерциальный модуль, который совмещает в себе функции сразу трех МЭМС датчиков — гироскопа, акселерометра и магнитометра. Гироскоп измеряет угловую скорость объекта, акселерометр — ускорение, а магнитометр помогает определять стороны света. Инерциальный модуль, сочетающий в себе все три функции, представляет собой полноценную автономную навигационную систему. При этом он универсальный и может быть установлен на объекты разного типа.
«У российских производителей таких датчиков сегодня нет. Наши датчики удароустойчивые — выдерживают удары до 30 000 g (g — ускорение свободного падения, ред.), работают в широком диапазоне температур — от -40 °С до +105 °С», — отмечает Тамара Нестеренко.
Работы по созданию датчиков были поддержаны Федеральной целевой программой (ФЦП) Минобрнауки России. На средства ФЦП в вузе была создана единственная за Уралом «чистая лаборатория» для экспериментальных исследований и корпусирования микроэлектромеханических сенсоров.
И сама комната, и оборудование в ней российского производства. В лаборатории есть электронный микроскоп, температурная и вакуумная камеры, установка для распайки золотыми проводниками контактов в датчиках и рабочие места для сотрудников.
Фото: в «чистой лаборатории» ТПУ«Из такой лаборатории система фильтрации воздуха удаляет всю пыль. Если частицы пыли не удалить, то они могут попасть в промежутки между подвижными элементами МЭМС датчиков, и вся система не будет работать. Сейчас наши датчики делают на сторонней производственной площадке, а мы в своей лаборатории исследуем их и соединяем электронную часть датчика с механической. Теперь нам не нужно искать, где можно провести такие исследования, что существенно ускорило процесс», — поясняет ученый.
Гироскопы на радиоуправляемых моделях
Авторы – Виталий Пузрин
Назначение гироскопов и устройство датчиков поворота
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, – там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также “крутых” современных гироскопах размешены в разных корпусах.
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо. Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.
Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Развитие современных технологий позволило разработать более совершенные датчики угловых скоростей. В результате появились пьезогироскопы, которые к настоящему времени полностью вытеснили механические. Конечно, они по-прежнему используют эффект кориолисова ускорения, но датчики являются твердотельными, то есть вращающиеся части отсутствуют. В наиболее распространенных датчиках используются вибрирующие пластины. Поворачиваясь вокруг оси, такая пластина начинает отклоняться в плоскости, поперечной плоскости вибрации. Это отклонение измеряется и поступает на выход датчика, откуда снимается уже внешней схемой для последующей обработки. Самыми известными производителями подобных датчиков являются фирмы Murata и Tokin.
Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.
У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т.е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка “нуля”, а в более дорогих – автоматическая установка “нуля” микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой “AVCS”) уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур. Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.
Типичные гироскопы и алгоритмы их работы
Наиболее известными производителями гироскопов на сегодняшний день являются фирмы Futaba, JR-Graupner, Ikarus, CSM, Robbe, Hobbico и т.д.
Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
Гироскопы со стандартным режимом работы
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.
Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась. Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет – посмотрите характеристики устройства и руководство по эксплуатации).
Регулировка чувствительности реализуется несколькими способами:
- Дистанционная регулировка отсутствует. Чувствительность задается на земле (регулятором на корпусе гироскопа) и не меняется во время полета.
- Дискретная регулировка (dual rates gyro). На земле задается два значения чувствительности гироскопа (двумя регуляторами). В воздухе можно выбирать нужное значение чувствительности по каналу регулирования.
- Плавная регулировка. Гироскоп выставляет чувствительность пропорционально сигналу в регулирующем канале.
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только “стандартный” режим работы, то можно отметить, что:
- Такие гироскопы имеют довольно низкую цену (вследствие простоты реализации)
- При установке на хвостовую балку вертолета, новичкам проще выполнять полеты по кругу, так как за балкой можно особенно не следить (балка сама разворачивается по ходу движения вертолета).
Недостатки:
- В недорогих гироскопах термокомпенсация сделана недостаточно хорошо. Необходимо вручную выставлять “ноль”, который может сместиться при изменении температуры воздуха.
- Приходится применять дополнительные меры по устранению эффекта подавления гироскопом управляющего сигнала (дополнительное микширование в канале управления чувствительности или увеличение расхода рулевой машинки).
Вот довольно известные примеры описанного типа гироскопов:
При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Гироскопы с режимом удержания направления
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки “3D”, “AVSC” (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
- на вертолете начинающий пилот в режиме висения может практически не управлять хвостовым винтом
- отпадает необходимость в микшировании шага хвостового винта с газом, что несколько упрощает предполетную подготовку
- триммирование хвостового винта можно производить без отрыва модели от земли
- становится возможным выполнение таких маневров, которые раньше были затруднены (например, полет хвостом вперед).
Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде “Torque Roll”.
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:
Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым “цифровым” машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Специализированные самолетные гироскопы
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.
При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов. Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен – при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 “Беркут” С-37 показывал фигуру “харриер”. Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет “несваливаемым на крыло”. Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И.В.Остославского “Аэродинамика самолета”.
Заключение
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, – по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форуме Акселерометри гироскоп: в чем разница?
Для определения положения и ориентации объекта используется множество различных сенсорных устройств. Наиболее распространенными из этих датчиков являются гироскоп и акселерометр. Несмотря на схожие цели, они измеряют разные вещи. При объединении в одно устройство они могут создать очень мощный массив информации.
Что такое гироскоп?
Гироскоп – это устройство, которое использует гравитацию Земли для определения ориентации.Его конструкция состоит из свободно вращающегося диска, называемого ротором, установленного на оси вращения в центре большего и более устойчивого колеса. Когда ось поворачивается, ротор остается неподвижным, чтобы указать центральное гравитационное притяжение и, следовательно, направление «вниз».
«Один типичный тип гироскопа состоит из подвешивания относительно массивного ротора внутри трех колец, называемых подвесами», – говорится в учебном пособии Университета штата Джорджия. «Установка каждого из этих роторов на высококачественные опорные поверхности гарантирует, что очень небольшой крутящий момент может быть приложен к внутреннему ротору.«
Гироскопы были впервые изобретены и названы в 19 веке французским физиком Жан-Бернаром-Леоном Фуко. Согласно Британской энциклопедии, только в 1908 году немецкий изобретатель Х. Аншютц-Кемпфе разработал первый работоспособный гирокомпас. Создан для использования в подводном аппарате. Затем, в 1909 году, он был использован для создания первого автопилота.
Что такое акселерометр?
Акселерометр – это компактное устройство, предназначенное для измерения негравитационного ускорения.Когда объект, в который он встроен, переходит из состояния покоя в любую скорость, акселерометр рассчитан на то, чтобы реагировать на вибрации, связанные с таким движением. В нем используются микроскопические кристаллы, которые подвергаются нагрузке при возникновении вибрации, и из-за этого напряжения генерируется напряжение для создания показаний при любом ускорении. Акселерометры являются важными компонентами устройств, которые отслеживают физическую форму и другие измерения при количественном измерении самодвижения.
Первый акселерометр был назван машиной Атвуда и был изобретен английским физиком Джорджем Атвудом в 1783 году, согласно книге Вилле Каякари «Практические МЭМС».
Использование гироскопа или акселерометра
Основное различие между двумя устройствами простое: одно может определять вращение, а другое – нет. В некотором смысле акселерометр может определять ориентацию неподвижного объекта по отношению к поверхности Земли. При ускорении в определенном направлении акселерометр не может отличить это от ускорения, обеспечиваемого гравитационным притяжением Земли. Если принять во внимание этот недостаток при использовании в самолете, акселерометр быстро потеряет большую часть своей привлекательности.
Гироскоп сохраняет свой уровень эффективности за счет возможности измерения скорости вращения вокруг определенной оси. При измерении скорости вращения вокруг оси крена самолета он определяет фактическое значение до тех пор, пока объект не стабилизируется. Используя ключевые принципы углового момента, гироскоп помогает указать ориентацию. Для сравнения, акселерометр измеряет линейное ускорение на основе вибрации.
Типичный двухкоординатный акселерометр показывает пользователям направление силы тяжести в самолете, смартфоне, автомобиле или другом устройстве.Для сравнения, гироскоп предназначен для определения углового положения на основе принципа жесткости пространства. Приложения каждого устройства довольно сильно различаются, несмотря на схожее предназначение. Например, гироскоп используется в навигации на беспилотных летательных аппаратах, компасах и больших лодках, что в конечном итоге способствует стабильности в навигации. Акселерометры также широко распространены в использовании и могут быть найдены в машиностроении, машиностроении, мониторинге оборудования, мониторинге зданий и сооружений, навигации, транспорте и даже в бытовой электронике.
Появление акселерометра на рынке бытовой электроники с появлением таких широко распространенных устройств, как iPhone, использующих его для встроенного приложения компаса, способствовало его общей популярности во всех направлениях программного обеспечения. Определение ориентации экрана, работа в качестве компаса и отмена действий простым встряхиванием смартфона – это несколько основных функций, которые зависят от наличия акселерометра. В последние годы его применение среди бытовой электроники теперь распространяется и на персональные ноутбуки.
Используемые датчики
Использование в реальных условиях лучше всего иллюстрирует различия между этими датчиками. Акселерометры используются для определения ускорения, хотя трехосевой акселерометр может определять ориентацию платформы относительно поверхности Земли. Однако, как только платформа начинает двигаться, интерпретировать ее показания становится сложнее. Например, при свободном падении акселерометр покажет нулевое ускорение. В самолете, выполняющем поворот под углом крена 60 градусов, трехосевой акселерометр регистрировал бы вертикальное ускорение 2G, полностью игнорируя наклон.В конечном счете, акселерометр нельзя использовать в одиночку, чтобы помочь в правильной ориентации самолета.
Акселерометры вместо этого находят применение во множестве бытовых электронных устройств. Например, среди первых смартфонов, которые использовали его, был iPhone 3GS от Apple с введением таких функций, как приложение компаса и встряхивание для отмены, согласно Wired.
Гироскоп будет использоваться в самолете, чтобы помочь в определении скорости вращения вокруг оси крена самолета. Когда самолет катится, гироскоп будет измерять ненулевые значения, пока платформа не выровняется, после чего он будет считывать нулевое значение, чтобы указать направление «вниз».”Лучшим примером считывания показаний гироскопа является индикатор высоты на типичных самолетах. Он представлен круглым дисплеем с экраном, разделенным пополам, причем верхняя половина имеет синий цвет для обозначения неба, а нижняя – красный цвет для обозначения Когда самолет кренится для разворота, ориентация дисплея будет смещаться вместе с креном, чтобы учесть фактическое направление земли
Предполагаемое использование каждого устройства в конечном итоге влияет на его практичность на каждой используемой платформе.Многие устройства выигрывают от наличия обоих датчиков, хотя многие полагаются на использование только одного. В зависимости от типа информации, которую вам нужно собрать – ускорения или ориентации – каждое устройство даст разные результаты.
Дополнительный отчет предоставила Алина Брэдфорд, сотрудник Live Science.
Дополнительные ресурсы
Об интерпретации измерений трехмерного гироскопа
Мы демонстрируем, что обычная интерпретация угловых скоростей, измеренных трехмерным гироскопом, как последовательных вращений Эйлера, вносит систематическую ошибку в ориентацию датчика, вычисленную во время отслеживания движения.Для малых углов поворота эта систематическая ошибка относительно невелика и может быть ошибочно отнесена к различным источникам неточностей датчика, включая дрейф выходного смещения, неточную чувствительность и выравнивание осей чувствительности датчика, а также шум измерения. Однако даже для таких малых углов из-за накопления с течением времени ошибочная интерпретация вращения может иметь значительное негативное влияние на точность вычисленной угловой ориентации. Мы подтверждаем наши выводы, используя реальные измерения, в которых описанная систематическая ошибка лишь усугубляет вредные эффекты, обычно приписываемые неточности датчика и случайному шуму измерения.Мы демонстрируем, что в целом можно достичь значительного улучшения точности угловой ориентации, если измеренные угловые скорости правильно интерпретировать как одновременные, а не как последовательные вращения.
1. Введение
С продолжающимися разработками в технологии производства гироскопов наблюдается рост их использования в различных областях [1–29]. 3D гироскопы являются неотъемлемой частью инерциальных навигационных устройств [5–8]; была показана возможность захвата движения, классификации и анализа [9–24]; и являются важными элементами вспомогательных, реабилитационных и носимых медицинских технологий [21, 22].Однако полезность трехмерных гироскопов может быть уменьшена без соответствующей значимой интерпретации измеренных значений и вычисления угловой ориентации.
Трехмерный гироскоп измеряет угловую скорость своего вращения в системе отсчета по трем осям чувствительности. Для идеального датчика эти выходные сигналы равны проекциям угловой скорости вращения на чувствительность, то есть осям собственной системы координат. Таким образом, в контексте измерения датчик одновременно вращается вокруг трех осей своей системы координат.При правильном сочетании эти три поворота эквивалентны фактическому вращению датчика в системе отсчета.
Практика, вводящая в заблуждение, возникает из-за интерпретации трех измеренных угловых скоростей как последовательных, то есть вращения Эйлера. Поскольку три угловые скорости, которые обеспечивает трехмерный гироскоп, представляют собой одновременные вращения, в общем случае использование углов Эйлера вносит систематическую ошибку в расчетную угловую ориентацию. Только в случае бесконечно малых вращений, которые, как показано, являются коммутативными, последовательные и одновременные вращения вокруг ортогональных осей приводят к одинаковой угловой ориентации [30, 31].
Существует ряд публикаций [23–28], в которых представлены многообещающие в остальном приложения трехмерных гироскопов, которые принимают вышеупомянутые вводящие в заблуждение интерпретации. По этой причине мы считаем необходимым более подробно остановиться на реалистичных эффектах интерпретации измерений гироскопа. Поэтому наша цель состоит в том, чтобы исследовать систематическую ошибку, возникающую из-за ошибочной интерпретации измерений трехмерного гироскопа, и количественно оценить ее влияние на точность вычисленной угловой ориентации.
Работа организована следующим образом. В разделе 2 мы решаем проблему правильной интерпретации измерений трехмерного гироскопа, используя выражения для вращения, которые эквивалентны трем одновременным ортогональным поворотам, измеренным трехмерным гироскопом, как получено в [30], и представляем подходящие средства для вычисление угловой ориентации.
Чтобы изолировать и количественно оценить вредное влияние ошибочной интерпретации вращения на точность угловой ориентации, мы рассматриваем в разделе 3 идеальный трехмерный гироскоп и простое вращение с постоянной угловой скоростью вокруг фиксированной оси вращения.В разделе 4 мы представляем уменьшение ошибки угловой ориентации, которое может быть достигнуто при использовании реального несовершенного трехмерного гироскопа в реальных измерениях, в которых описанная систематическая ошибка затемняет точность вычисленной угловой ориентации наряду с типичными ошибками, связанными с неточным датчиком. и случайный шум измерения.
Хотя технологии производства недорогих гироскопов быстро улучшаются, было показано, что эти датчики страдают от дрейфа выходного смещения и неточной чувствительности и выравнивания осей чувствительности датчика.Поскольку наша цель – количественно оценить вредный эффект ошибочной интерпретации вращения, мы рассматриваем правильно откалиброванный датчик. Повышение точности трехмерных гироскопов было предметом ряда текущих исследований и представлено в других источниках [32–35]. Наконец, в разделе 5 мы суммируем наши результаты и делаем выводы.
Во всех последующих разделах мы соблюдаем следующие правила обозначений: жирные буквы обозначают матрицы и векторы, а большой и мелкий курсив обозначают скаляры.
2. Интерпретация измерений 3D гироскопа
2.1. Одновременные вращения
Давайте рассмотрим идеальный трехмерный гироскоп, который вращается с постоянной угловой скоростью ω вокруг оси вращения v в трехмерной системе отсчета. Он обеспечивает измерения одновременных угловых скоростей ω x , ω y и ω z вокруг трех осей собственной системы координат ортогонального датчика: x , y и z , соответственно.В [30, 36] мы вывели вектор вращения Φ , называемый углом одновременного ортогонального вращения (SORA), который мы можем использовать для правильной интерпретации измеренных значений. Составляющие этого вектора равны углам поворота трех одновременных поворотов вокруг осей датчика: где ω x , ω y и ω z – три измеренные угловые скорости; φ x , φ y и φ z – углы поворота; и T – интервал измерения.
Пока ось v вращения постоянна в течение интервала измерения T , ориентация и величина вектора SORA Φ (1) соответственно равны оси и углу фактического вращения гироскопа. . Он считает, что
Из (1) – (3) можно сделать вывод, что гироскоп измеряет проекции вектора угловой скорости его вращения по его осям чувствительности. Обратите внимание, что в общем случае из-за некоммутативности вращения векторы вращения (1) и угловой скорости (4) не могут рассматриваться как действительные векторы.Это возможно только в частном случае постоянной оси вращения.
Используя ось вращения (2) и угол (3), мы можем вычислить угловую ориентацию осей внутренней системы координат датчика в системе отсчета. Введем R ( φ , v ) для обозначения матрицы вращения 3 × 3, связанной с осью (2) и углом (3) вращения: где c и s соответственно обозначают cos ( φ ) и sin ( φ ).
Далее мы вводим матрицы 3 × 3 S init и представляем начальную и конечную ориентацию датчика в системе отсчета. Столбцы S init и представляют собой единичные векторы 3 × 1, представляющие соответственно начальную и конечную ориентации осей координат датчика. Мы можем написать
Порядок матриц S init и R ( φ , v ) в умножении в (6) учитывает тот факт, что ось вращения v (2) задана в 3D собственная система координат гироскопа.
2.2. Последовательные вращения
В отличие от трех вращений, представленных с помощью SORA (1), углы Эйлера представляют собой последовательность из трех элементарных вращений, то есть поворотов вокруг осей (внутренней или опорной) системы координат. Если рассматривать только вращения вокруг различных осей внутренней системы координат, возможны шесть последовательностей: x – y – z , y – z – x , z – x – y , x – z – y , z – y – x и y – x – z .Поскольку вращения, как правило, не коммутативны, каждая из этих шести последовательностей приводит к разной конечной угловой ориентации, ни одна из которых не является правильной, когда все три поворота выполняются одновременно, как в случае, когда трехмерный гироскоп вращается вокруг произвольной оси. Использование любой из этих последовательностей при вычислении угловой ориентации датчика приводит к систематической ошибке.
Поскольку три оси координат датчика эквивалентны, мы можем использовать любую из вышеупомянутых последовательностей для количественной оценки ошибки вычисленной угловой ориентации.Мы выбрали последовательность z – y – x , также известную как аэрокосмическая последовательность с углами поворота, называемыми рысканием, тангажем и креном.
Используя углы φ z , φ y и φ x , полученные с помощью трехмерного гироскопа вместо рысканья, тангажа и крена, соответственно, мы можем рассчитать окончательный ориентация датчика согласно интерпретации последовательного вращения как
R E ( φ z , φ y , φ x ) (7) обозначает композицию матрицы вращения Эйлера 3 × 3: где s k и c k соответственно обозначают sin ( φ k ) и cos ( φ k ), k представляет одну из осей, x , y , или z .
Ориентация самолета действительно может быть представлена удобным и интуитивно понятным способом с помощью трех ориентаций Эйлера. Однако углы Эйлера не равны углам, измеренным с помощью трехмерного гироскопа, и, очевидно, их использование в этом контексте ошибочно. Сравнивая (5) и (8), мы можем сделать вывод, что матрицы вращения для одновременной (5) и последовательной (8) интерпретации вращения не равны, и что использование последнего не даст правильного результата в случае измерений 3D гироскопа.
Рассмотрим простой наглядный пример. Предположим, что датчик вращается с угловой скоростью ω = 360 ° / с вокруг единичной оси для T = 1 с. После этого времени вращения ориентация датчика, очевидно, равна его начальной ориентации; таким образом, матрица вращения для синхронной интерпретации (5) фактически в данном случае является единичной матрицей. Мы можем написать
Рассматривая (1) – (4), мы можем сделать вывод, что в этом случае углы, измеренные с помощью идеального гироскопа, будут равны
Подставляя эти углы для углов Эйлера рыскания, тангажа и крена в (8), получаем
Полученная матрица вращения R E ( φ z , φ y , φ x ) не равна единичной матрице I и, очевидно, приведет к неправильная угловая ориентация:
На практике при расчетах окончательной угловой ориентации используются гораздо меньшие углы поворота.По мере того, как углы вращения становятся все меньше, разница между результатами одновременного и последовательного вращения становится все более незначительной. Однако даже для малых углов ошибка вычисленной угловой ориентации накапливается со временем и может стать значительной, как мы представим и обсудим в следующих разделах.
3. Систематическая ошибка угловой ориентации
3.1. Меры погрешности угловой ориентации
Мы выражаем ошибку угловой ориентации ε в терминах угла отклонения ориентации, то есть угла поворота, который корректирует расчетную ориентацию датчика: где S fin – матрица 3 × 3 фактической конечной ориентации и матрица 3 × 3 расчетного состояния.
Из-за интегрирования ошибка вычисленной угловой ориентации накапливается с течением времени. Чтобы результаты были сопоставимы при различных моделированиях и измерениях, мы нормализуем угол отклонения ε (14) по отношению к общему времени вращения T :
3.2. Методология
Чтобы изолировать эффект ошибочной интерпретации вращения, мы рассматриваем идеальный трехмерный гироскоп, который обеспечивает дискретные по времени выборки угловых скоростей в моменты выборки нТл с , где T с – интервал выборки: и f s – частота дискретизации.Таким образом, получаем N = T f s отсчетов вектора угловой скорости ω (4).
Далее мы считаем, что оси координат датчика и системы отсчета изначально совмещены. Таким образом, начальная ориентация датчика задается единичной матрицей:
Для этого исследования мы, наконец, считаем, что датчик вращается в течение T = 1 с с постоянной угловой скоростью ω = 360 ° / с вокруг единичной оси:
Таким образом, в этом примере начальная и фактическая конечная ориентации датчика идентичны.Мы можем написать
Для каждого из образцов вращения N датчик вращается на угол Δ φ = 360 ° / N вокруг постоянной оси v . Поскольку мы предполагаем, что гироскоп точен, а ось вращения постоянна на протяжении всего вращения, мы можем сделать вывод, что все отсчеты измеренных угловых скоростей равны и что все углы поворота вокруг осей датчика равны
Окончательно можно сделать вывод, что для всех образцов n угол поворота, рассчитанный по (3), равен
Очевидно, что объединение всех вращений N в единую матрицу вращения даст единичную матрицу I .Учитывая это и (19) для вычисления результирующей угловой ориентации (6), мы можем, следовательно, написать
Это означает, что интерпретация вращений как одновременных с учетом SORA (1) – (4) не приводит к ошибке в вычисленной угловой ориентации.
Для расчета окончательной угловой ориентации датчика в соответствии с интерпретацией последовательного вращения (7) мы умножаем матрицу вращения Эйлера R E (Δ φ s , Δ φ s , Δ φ с ) (8) сама по себе N – 1 раз:
Подставляя в (14), мы можем вычислить ошибку угловой ориентации для интерпретации последовательного вращения.Поскольку как начальная, так и фактическая конечная угловые ориентации датчика задаются единичной матрицей (19), (14) упрощается до
Общее время измерения установлено на T = 1 с, поэтому нормированный угол отклонения (15) равен
Поскольку Δ φ s уменьшается с частотой дискретизации и когда достаточно малые угловые повороты становятся почти коммутативными, мы ожидаем, что обе меры погрешности, ε (25) и ε norm (26), уменьшатся. с частотой дискретизации тоже.
3.3. Результаты и обсуждение
Нормализованные углы отклонения ориентации ε norm , полученные согласно (26) для разных частот дискретизации, уменьшающихся от 10 000 Гц до 4 Гц в логарифмической шкале, представлены на рисунке 1. Разные частоты дискретизации соответствуют разным углам. поворота гироскопа Δ φ , увеличиваясь от 0,036 ° до 90 °.
Как и ожидалось, полученные результаты показывают, что ошибка угловой ориентации, которая является следствием ошибочной интерпретации трех одновременных ортогональных вращений, измеренных с помощью 3D-гироскопа, как последовательных, увеличивается с величиной углов рассматриваемых шагов вращения.
Мы можем заметить, что при значительном снижении частоты дискретизации, то есть увеличении угла отдельного поворота Δ φ , величина ошибки может стать настолько значительной, что результаты станут совершенно ненадежными даже после всего лишь одной секунды вращения. . В рассматриваемом сценарии измерения для частоты дискретизации 4 Гц индивидуальный угол поворота составляет Δ φ = 90 °. Для угла такой величины нормализованная ошибка угловой ориентации, вычисленная в соответствии с интерпретацией последовательного вращения, составляет ε norm = 73.16 ° / с.
Из-за накопления во времени абсолютной ошибкой в расчетной угловой ориентации нельзя пренебрегать даже для малых углов. Например, для общей частоты дискретизации f s = 2048 Гц индивидуальный угол поворота составляет 0,176 °, а систематическая ошибка вычисленной угловой ориентации ε превышает 6 ° после одной минуты вращения.
Также стоит отметить, что, поскольку ось вращения постоянна на протяжении всего вращения, правильно интерпретируя измеренные угловые скорости, мы можем вычислить окончательную угловую ориентацию за один шаг.Если применить этот подход к интерпретации измеренных оборотов как последовательных, то это приведет к еще большим ошибкам, чем представлено здесь.
4. Измерение в реальных условиях
4.1. Методология
Чтобы наблюдать последствия интерпретации вращения в реальных измерениях, в которых описанная систематическая ошибка затемняет точность вычисленной угловой ориентации наряду с типичными ошибками, связанными с неточным датчиком и случайным шумом измерения, мы полагаемся на отслеживание реального движения .
Мы использовали 3D-гироскоп MEMS ITG3200-3 производства InvenSense (Саннивейл, Калифорния, США) [37], обеспечивающий 16-битный выходной сигнал в диапазоне ± 2000 ° / с. Частота дискретизации аналого-цифрового преобразователя датчика была установлена на 1000 Гц. Однако, чтобы более реалистично относиться к среде измерения в реальном времени и поддерживать вычислительную эффективность, полученные сигналы были субдискретизированы до f s = 50 Гц. Перед измерениями проводилась статическая калибровка сенсора по методике, описанной в [35].
Мы провели семь измерений. В каждом из них мы вручную вращали датчик. В конце каждого измерения мы позиционировали датчик в той же ориентации, что и изначально. Эта процедура позволила нам оценить точность угловой ориентации как отклонение окончательной (вычисленной) ориентации датчика от его начальной ориентации и сравнить результаты обеих интерпретаций простым способом, избегая использования дополнительного оборудования.
Мы повернули датчик таким образом, чтобы при каждом измерении динамика вращения была больше, чем при предыдущем измерении.Как было подробно описано в разделе 2, до тех пор, пока ось вращения гироскопа постоянна в течение интервала измерения, ориентация и величина вектора SORA (1) соответственно равны оси и углу фактического вращения гироскопа. . Однако для общего сценария измерения необходимо учитывать возможные изменения оси вращения во время T s . Постепенно увеличивая динамику измеренных вращений, мы могли бы количественно оценить влияние, которое эти (неизмеримые) изменения оси вращения оказывают на точность угловой ориентации.
В остальном, чем указано, движение гироскопа, включая его вращение, было произвольным. Полученные угловые скорости представлены на рисунке 2.
Предполагая, что в среднем изменение угловой скорости между двумя последовательными выборками отражает изменение во время выборок, то есть интервалы измерения n , мы можем использовать следующая мера динамики угловой скорости: для представления изменений осей вращения в течение T s .
Различные источники неточностей измерений, включая несовершенную калибровку датчика, шум и неизмеримые изменения оси вращения, очевидно, вносят ошибки в угловую ориентацию, вычисленную как в соответствии с интерпретациями одновременного, так и последовательного вращения. Поскольку начальная и фактическая конечная угловые ориентации датчика во всех семи выполненных измерениях были идентичны, мы могли рассчитать соответствующие углы отклонения (14) как где ε (seq) – угол отклонения ориентации при последовательном вращении, а ε (sim) – при рассмотрении одновременных вращений.Далее мы получили нормированные углы отклонения для обеих интерпретаций и, подставив (28) в (15). Мы ожидаем, что на все эти ошибки будет влиять динамика угловой скорости (27).
Чтобы оценить выигрыш от использования правильной интерпретации измерений трехмерного гироскопа, мы вводим F err для обозначения коэффициента уменьшения ошибки угловой ориентации:
4.2. Результаты и обсуждение
Результаты представлены на Рисунке 3.Для интерпретации одновременного вращения погрешность вычисленной угловой ориентации составляет от 0,034 ° до 1,250 ° за секунду вращения и со временем может стать значительной. Однако ошибка, возникающая при интерпретации поворотов как последовательных, намного больше и составляет от 0,132 ° до 16,152 ° за секунду вращения. Снижение погрешности от 74% до 98% достигается при правильной интерпретации измерений гироскопа.
Принимая во внимание практическую ценность этих результатов, мы можем отметить следующее: даже для самой большой ошибки, полученной при интерпретации измеренных вращений как одновременных (1.250 ° / с), мы можем вращать датчик почти в 13 раз дольше, прежде чем достигнем ошибки подхода интерпретации последовательного вращения (16,152 ° / с).
Приведенные результаты показывают, что погрешность угловой ориентации, полученной согласно обеим интерпретациям вращений, в целом увеличивается с динамикой угловых скоростей, которые отражают изменения оси вращения во время интервалов измерения. Эта ошибка, по сути, является ошибкой измерения и не может быть учтена в расчетах, независимо от используемого метода интерпретации.Однако даже для самых экстремальных условий, рассматриваемых здесь, коэффициент уменьшения ошибки является значительным.
5. Заключение
Из-за различных источников неточностей датчика движения точное определение местоположения является деликатной задачей. Ошибочная интерпретация значений, измеренных с помощью 3D-гироскопа, только усиливает пагубное влияние на предполагаемое положение датчика. Оценка угловой ориентации путем интерпретации трех одновременных вращений как последовательных, то есть Эйлера, может показаться простой.Однако углы, измеренные с помощью гироскопа, в общем случае не равны углам элементарных вращений Эйлера. Мы показали, что интерпретация одновременных вращений не только как последовательные теоретически ошибочна, но и вносит значительную систематическую ошибку в угловую ориентацию, когда углы вращения становятся большими.
Для скорости вращения 360 ° / с при выборке с частотой 2048 Гц ошибка угловой ориентации превышает 6 ° после одной минуты вращения. Для самой низкой рассматриваемой частоты дискретизации (4 Гц) для одного и того же движения вычисленная угловая ориентация совершенно ненадежна, поскольку ошибка превышает 73 ° только после одной секунды вращения.Мы показали, что значительное повышение точности может быть достигнуто в реальном сценарии измерения, в котором эта систематическая ошибка только расширяет пагубные последствия неточностей датчика в шумной среде.
Необходимо отметить, что синхронная интерпретация вращения и вычисление угловой ориентации, представленные в этой статье, ориентированы на устранение систематической ошибки, возникающей из-за ошибочной интерпретации вращения. Различные интерпретации не могут компенсировать другие источники неточностей.
Помимо случайных ошибок, связанных с неточным датчиком, ошибка, которую невозможно устранить, является следствием изменений угловой скорости между моментами отбора проб. Эта ошибка, по сути, является ошибкой измерения, и ее можно адекватно учесть не вычислением, а соответствующим сокращением интервала измерения, то есть увеличением частоты дискретизации. К сожалению, это противоречит ограничению энергетической автономии устройств, использующих гироскопы для частого или непрерывного повседневного отслеживания движения, и требует все более низкой частоты дискретизации.
Однако, даже когда угловая скорость изменяется во время интервалов измерения, для иллюстративного движения, рассматриваемого в этой статье, снижение погрешности от 74% до 98% возможно, если измерения трехмерного гироскопа интерпретированы правильно и сам датчик правильно откалиброван. . Для более точных гироскопов высокого класса этот коэффициент был бы еще больше. Следовательно, мы можем вращать датчик в течение значительно большего времени, прежде чем достигнем ошибки подхода вычисления последовательного вращения.
Этими наблюдениями мы можем подтвердить наше первичное предположение; то есть, как правило, можно добиться значительного уменьшения ошибок при правильной интерпретации результатов измерения трехмерного гироскопа. Наконец, мы можем сделать вывод, что, приняв методы, представленные в этой статье, можно более точно отслеживать и анализировать движения.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Гироскопические датчики – как они работают и что впереди | о гироскопическом датчике | Техническая информация | Другая информация
Гироскопические датчики
Гироскопические датчики, также известные как датчики угловой скорости или датчики угловой скорости, представляют собой устройства, измеряющие угловую скорость.
| Угловая скорость |
|---|
| Проще говоря, угловая скорость – это изменение угла поворота в единицу времени. Угловая скорость обычно выражается в градусах в секунду (градусы в секунду). |
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Типы гироскопических датчиков
Гироскопические датчикибывают разных типов.Здесь представлены разные типы по размеру и производительности.
В последние годы гироскопические датчики вибрации нашли свое применение, среди прочего, в системах обнаружения дрожания камеры для компактных видео- и фотоаппаратов, в датчиках движения для видеоигр и в системах электронного контроля устойчивости (противоскольжения) транспортных средств.
Ожидается, что в будущем спрос на гироскопы вибрации будет расти в таких областях, как системы безопасности и поддержки водителя транспортных средств, а также управление движением роботов.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Гироскопические датчики вибрации
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему элементу. По этой причине точность измерения угловой скорости значительно различается в зависимости от материала элемента и конструктивных отличий. Здесь мы кратко опишем основные типы элементов, используемых в гироскопических датчиках вибрации.
Типы элементов, применяемых в гиродатчиках вибрации
Производители гироскопических датчиков вибрации используют различные материалы и конструкции, чтобы разработать компактные, высокоточные гироскопические датчики с хорошими характеристиками, в том числе:
• масштабный коэффициент
• температурно-частотный коэффициент
• компактный размер
• ударопрочность
• стабильность
• шумовые характеристики
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Как работает определение угловой скорости (в датчиках вибрационного гироскопа)
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему объекту.
Здесь мы объясняем, как это работает, на примере кристаллического элемента Epson с двойной Т-структурой.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Применение гироскопических датчиков
Гиродатчики имеют три основных применения.
| Измерение угловой скорости |
|---|
| Определите величину создаваемой угловой скорости. Используется для измерения самой величины движения. Пример) Проверка спортивных движений |
| Определение угла |
|---|
| Определяет угловую скорость, создаваемую собственным движением датчика. Углы обнаруживаются процессором посредством операций интеграции. Перемещенный угол передается в приложение и отражается в нем. Бывший.) Автомобильные навигационные системы Игровые контроллеры Сотовая связь |
| Механизмы управления |
|---|
| Определяет вибрацию, вызванную внешними факторами, и передает данные о вибрации в виде электрических сигналов на ЦП. Используется для корректировки ориентации или баланса объекта. Пример) Коррекция дрожания камеры Управление автомобилем |
Интересные факты
Примеры угловой скорости в приложениях:
• Автомобильные навигационные системы: ~ 10 град / с
• Управление транспортным средством: ~ 30 град / с
• Коррекция дрожания камеры: ~ 100 град / с
• Игровые контроллеры: ~ 300 град / с
• Определение движения лучших игроков в гольф: ~ 3000 град / с
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Примеры приложений
Гироскопические датчики используются во всех изделиях, которые нас окружают.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
против датчика гироскопа и IMU, как выбрать один?
С ростом популярности датчиков акселерометра и гироскопа MEMS для обнаружения движения Arduino многие рассматривают возможность выбора одного из них, чтобы начать свой следующий проект. Однако из-за множества доступных вариантов выбор подходящего может оказаться сложной задачей.
Прежде, чем волноваться и беспокоиться о том, как выбрать акселерометр и гироскоп, вам сначала нужно узнать разницу между ними.
В этом руководстве я расскажу вам следующее:
- Что такое акселерометр?
- Что такое гироскоп?
- В чем разница между акселерометром и гироскопом?
- Как выбрать акселерометр?
- Как выбрать гироскоп?
- Достойные упоминания с IMU
Что такое акселерометр?
Акселерометры – это электромеханические устройства , которые измеряют ускорение, скорость изменения скорости объекта. Другими словами, это устройства, которые реагируют на любые вибрации, связанные с движением.
Как работает акселерометр?Акселерометры работают двумя способами; Пьезоэлектрический эффект и изменение емкости. Это сбивает с толку? Это относительно просто. Вот как это сделать:
. Пьезоэлектрический эффект:- Акселерометры содержат микроскопические кристаллические структуры, генерирующие напряжение при возникновении вибрации
- Генерируемое напряжение будет определять величину ускорения
Этот метод использует формулу для определения ускорения.Поскольку мы знаем, что Сила = Масса x Ускорение, чтобы найти ускорение, потребуется Сила / Масса объекта.
Так работает эффект емкости в акселерометре MEMS:
- Имеются 2 емкостные пластины
- Масса объекта давит на одну из пластин конденсатора, изменяя емкость и позволяя измерить силу
- При известных силе и массе объекта затем измеряется ускорение
могут быть основаны на других принципах работы, например, акселерометры mems с микрочипом.В наши дни акселерометры Mems предназначены для простой интеграции с Arduino или другими микроконтроллерами, наиболее распространенными из которых являются датчики серии ADXL (популярные – ADXL345, ADXL335).
Благодаря миниатюрным датчикам акселерометры Mems подходят для использования в IoT, маломощных, промышленных и автомобильных приложениях, здравоохранении и т. Д.
Приложения акселерометровТеперь, когда мы поняли, как работает акселерометр, мы рассмотрим, для чего он обычно используется.Вот основной список приложений:
- Приложения компаса / карты на смартфонах (iPhone, Andriod и т. Д.) С осевым распознаванием
- Определение наклона; iPhone использует акселерометр, чтобы определить, находится ли телефон в портретном или ландшафтном режиме
- Обнаружение землетрясения
- Обнаружение падения
- Медицинские устройства, такие как искусственные части тела
- Фитнес-трекеры / носимые устройства
- Игры / приложения, требующие обнаружения движения ( Wii, Kinect и т. Д.)
Примечание. Акселерометры обычно используются для определения положения, скорости, вибрации и определения ориентации.
Что такое гироскоп?
Прежде чем мы коснемся различий, нам нужно сначала понять, что такое гироскоп. Гироскоп – это устройство, используемое для измерения вращательных изменений или поддержания ориентации. Он основан на принципе сохранения углового момента.
Как работает гироскоп?Типичный гироскоп содержит ротор, подвешенный внутри трех колец, называемых стабилизаторами.
Он работает через эффект прецессии, позволяя гироскопам преодолевать гравитацию при вращении оси вращения. Это означает, что вместо того, чтобы упасть под действием силы тяжести, он автоматически поворачивается в сторону.
Подробнее о том, как работают гироскопы, вы можете прочитать в этой статье!
Приложения гироскопаПонять, как это работает, – это одно, но для чего он используется? Хотя гироскопы относятся к 18 веку, они все еще используются и сейчас, и они стали неотъемлемой частью навигационных систем, которые мы обычно видим в наши дни:
- Самолеты
- Космические станции
- Устойчивость транспортных средств; мотоциклы, корабли
- Инерционные системы наведения
- Потребительская электроника через гироскопы MEMS (большинство телефонов Andriod среднего и высшего класса)
Вам может быть интересно, что такое гироскопы MEMS? Разве гироскопы не просто гироскопы?
ГироскопыMEMS – это небольшие миниатюрные датчики, разработанные благодаря интеграции в них технологии MEMS (Micro-Electro-Mechanical-System).Это позволяет использовать функции гироскопов в меньшем корпусе!
Подобно акселерометрам MEMS, с такой технологией, он обеспечивает меньшую стоимость, меньшую мощность и применимость с вашими Arduino, Raspberry Pi и т. Д.!
Акселерометр и гироскоп Разница акселерометра и гироскопа:
Для облегчения понимания разницы между акселерометром и гироскопом я для иллюстрации привел сравнительную таблицу:
| Акселерометры | Гироскопы | |
|---|---|---|
| Что это такое | Электромеханические устройства для измерения ускорения Невозможно отличить вращение от ускорения | Устройство, используемое для измерения угловых изменений или поддержания ориентации Не подвержено ускорению |
| Назначение | Измерение линейного ускорения на основе вибрации | Измерение скорости вращения и углового положения вокруг определенной оси |
| Приложения | Обычно встречается и применяется в бытовой электронике | Обычно встречается и применяется в самолетах и летательных аппаратах |
В целом, хотя оба устройства имеют свои заметные различия, многие устройства все еще выигрывают от наличия обоих датчиков.В конечном итоге все сводится к тому, какие приложения вы ищете.
Как выбрать акселерометр и гироскоп? Как выбрать акселерометр?
Чтобы помочь вам выбрать подходящий акселерометр MEMS для вашей Arduino, вот важные критерии, которые вы должны учитывать!
| Критерии | Рекомендации / соображения |
|---|---|
| Диапазон | Для точных показаний: Выберите меньший диапазон полной шкалы, так как он даст вам более точные показания благодаря более чувствительному выходному сигналу. Рассмотрите диапазоны ускорения, которые подходят для ваших проектов. |
| Интерфейс | Самый простой интерфейс для работы: Аналоговый интерфейс, поскольку аналого-цифровые преобразователи (АЦП) реализованы в большинстве микроконтроллеров Для получения фиксированной частоты: Большинство функций и меньший уровень шума: |
| Оси | Трехосные акселерометры, наиболее распространенные и не намного более дорогие по сравнению с одно- или двухосными акселерометрами |
| Энергопотребление | Требуемый ток потребления акселерометра обычно находится в диапазоне сотен мкА. Учтите требуемую мощность. |
| Бонусные функции | Выбор более новых моделей акселерометров может быть лучшим выбором, поскольку они включают в себя больше бонусных функций, таких как: Выбор диапазонов измерения Контроль сна Обнаружение 0-g Обнаружение касания |
На основании приведенных выше критериев я рекомендую эти акселерометры, доступные в Seeed!
Grove – 3-осевой цифровой акселерометр со сверхнизким энергопотреблением ± 16 г (BMA400)Основанный на датчике BMA400, этот 3-осевой цифровой акселерометр представляет собой 12-битный трехосный датчик ускорения с функцией интеллектуального управления движением и прерыванием по положению.С легкостью обнаруживайте движения, такие как ходьба, бег, стояние!
Оценка критериев:
| Критерии | Оценка | |
| Диапазон | ± 2g, ± 4g, ± 8g, ± 16g | |
| Интерфейс | 9043 I2C Оси3 оси | |
| Потребляемая мощность | 18 мкА при 5 В, 14 мкА при 3.3V | |
| Дополнительные функции | Автоматическое понижение энергопотребления / пробуждение Активность / бездействие Счетчик шагов Распознавание активности (ходьба, бег, неподвижность) Определение ориентации Касание / двойное касание |
Хотите узнать больше? Более подробная информация вместе с руководством по акселерометру Arduino доступна на нашей вики-странице здесь!
Трехосевые акселерометры ADXL серииПомимо вышеупомянутого акселерометра на базе BMA400, популярная серия ADXL также доступна для покупки здесь, в Seeed! Предлагаем вашему вниманию следующие 3-осевые акселерометры ADXL:
The Grove – 3-осевой аналоговый акселерометр ± 20 г (ADXL356B) и Grove – 3-осевой цифровой акселерометр ± 200 г (ADXL372) в настоящее время нет в наличии, но следите за его пополнением, подписавшись или рассмотрите ADXL356C и ADXL357!
Как выбрать гироскоп?
Теперь, когда вы поняли, как выбрать подходящий акселерометр, вот критерии, которые помогут вам с легкостью выбрать гироскоп!
| Критерии | Соображения / Рекомендации |
|---|---|
| Диапазон | Выбирая гироскоп, убедитесь, что максимальный диапазон гироскопа не превышает максимальную угловую скорость, которую вы хотите измерить. |
| Интерфейс | Подобно интерфейсам акселерометра, выбор гироскопов с аналоговым выходом приведет к простейшей интеграции с вашим микроконтроллером. Однако выбор гироскопа с цифровым интерфейсом является привлекательным вариантом, поскольку он, как правило, имеет больше функций Вам не придется очень беспокоитесь об этом критерии, так как большинство гироскопов на рынке имеют аналог |
| Количество осей | Гироскопы доступны с 1, 2 или 3 осями, и вам нужно будет подумать, какой из этих трех гироскопов будет измерять, поскольку это повлияет на вращение. Некоторые 2-осевые гироскопы измеряют оси Y и Z, в то время как другие измеряют Y и Оси X |
| Энергопотребление | Чтобы избежать чрезмерного / недостаточного питания, проверьте, сколько энергии будет потреблять гироскоп, если ваш проект работает от батареи |
| Бонусные функции | Гироскопы, как правило, не предлагают много дополнительных функций, кроме вывода температуры. Если есть дополнительные функции, это будет плюсом! |
На основании вышеперечисленных критериев я рекомендую покупать эти гироскопы!
Примечание: Следующие рекомендации относятся к гироскопам, интегрированным вместе с акселерометром, что позволяет использовать их функции всего в одном модуле!
Grove – 6-осевой акселерометр и гироскопОснованный на микросхеме LSM6DS3, этот 6-осевой акселерометр и гироскоп представляет собой экономичный вариант с подробным SDK для упрощения программирования с вашим Arduino!
Оценка критериев:
| Критерии | Оценка |
| Диапазон | Гироскоп: ± 125, ± 245, ± 500, ± 1000, ± 2000 градусов в секунду (dps) Акселерометр: |
| Интерфейс | I2C |
| No.осей | 3-осевой гироскоп 3-осевой акселерометр |
| Потребляемая мощность | Стандартный комбинированный режим: 0,9 мА Комбинированный высокопроизводительный режим: 1,25 мА |
| Дополнительные функции – 9055 |
Хотите узнать больше? Более подробная информация вместе с этим руководством по гироскопу Arduino доступна на нашей вики-странице здесь!
Grove – 6-осевой акселерометр и гироскоп (BMI088) Основанный на гироскопе BOSCH BMI088,
, этот 6-осевой акселерометр и гироскоп разработан для дронов, робототехники и промышленных приложений с возможностью удовлетворения сложных требований к производительности!
Оценка критериев:
| Критерии | Оценка |
| Диапазон | Гироскоп: ± 125 ° / с @ 262.1 LSB / ° / с ± 250 ° / с при 131,1 LSB / ° / с ± 500 ° / с при 65,5 LSB / ° / с ± 1000 ° / с при 32,8 LSB / ° / с ± 2000 ° / с при 16,4 младшего бита / ° / с Акселерометр: |
| Интерфейс | I2C |
| Кол-во осей | Трехосный гироскоп 16 бит Трехосный акселерометр 16 бит |
| Потребляемая мощность | Рабочее напряжение: 3.3V / 5V Низкое энергопотребление в зависимости от используемого гироскопа |
| Дополнительные функции | Низкий спектральный шум |
Хотите узнать больше? Более подробная информация вместе с этим руководством по гироскопу Arduino доступна на нашей вики-странице здесь!
Почетные грамоты Гироскоп, акселерометр, датчик магнитометра (IMU) Акселерометры и гироскопы
– отличные варианты для начала работы с датчиком движения, но если вы погрузитесь глубже и изучите другие варианты, вы обнаружите, что у вас есть инерциальные измерительные устройства (IMU).
IMU– это, по сути, акселерометры + гироскопы + датчики магнитометра, что делает его полным пакетом, способным легко вычислять ориентацию, положение и скорость!
Здесь, в Seeed, мы также предлагаем IMU на ваш выбор, вот некоторые из них, которые стоит рассмотреть!
Роща – IMU 9DOF v2.0Хотите начать работу с IMU? Роща – IMU 9DOF – отличное место для начала!
Оснащенный 3-осевым гироскопом, 3-осевым акселерометром и 3-осевым магнитометром, это 9-осевой модуль отслеживания движения на основе MPU-9250.
Его функции включают в себя:
- Сверхнизкое энергопотребление, низкое напряжение
- Широкий диапазон обнаружения
- Механизм Internal Digital Motion Processing ™ (DMP ™) поддерживает расширенные функции обработки движения и функции низкого энергопотребления, такие как распознавание жестов с использованием программируемых прерываний
- Функция самотестирования
- Digital- 3-осевые датчики угловой скорости с выходом (гироскопы) с программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / с
- Трехосевой акселерометр с цифровым выходом и программируемой полной шкалой диапазон ± 2 г, ± 4 г, ± 8 г и ± 16 г
- Трехосевой акселерометр с цифровым выходом и полным диапазоном измерения ± 4800 мкТл
Хотите узнать больше? Вы можете перейти на страницу продукта, чтобы узнать больше!
Роща – IMU 10DOF v2.0Требуется существенное обновление по сравнению с предыдущей рекомендацией? Grove – IMU 10DOF v2.0 предоставляет вам в общей сложности 10 осей данных, гораздо больше приложений и лучшую производительность!
Созданный на основе новых и улучшенных Bosch BMP280 и MPU-250, наряду с цифровым процессором движения (DMP) в корпусе 3 * 3 * 1 мм, этот IMU не только маленький, но и потребляет намного меньше энергии!
- Для получения дополнительной информации о MPU-9250 и BMP280 обратитесь к соответствующим таблицам данных
Его функции включают в себя:
- Датчики угловой скорости (гироскопы) по осям X, Y и Z с цифровым выходом и программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / с
- Цифровой- выходной 3-осевой акселерометр с программируемым диапазоном полной шкалы ± 2g, ± 4g, ± 8g и ± 16g
- Магнитометр с цифровым выходом и полным диапазоном шкалы ± 4800uT
- Измерение температуры с ± 1.Точность 0 ° C
- Диапазон измерения атмосферного давления 300 – 1100 гПа с точностью ± 1,0 гПа
Хотите узнать больше? Вы можете перейти на страницу продукта, чтобы узнать больше!
СводкаЭто все на сегодняшний день руководства по акселерометрам, гироскопам и выбору подходящего. Учитывая растущую популярность обоих, пришло время выбрать один для себя! Подходящий!
Следите за нами и ставьте лайки:
Теги: 9DOF, акселерометр, акселерометр Arduino, руководство по акселерометру, акселерометр против гироскопа, ADXL335, ADXL356C, adxl357, adxl372, bma400, акселерометр Grove, гироскоп, гироскоп, гироскоп arduino, IMU, lsm303, акселерометр, акселерометрПродолжить чтение
Как работают гироскопы | Академия роботов
Последним компонентом блока измерения инерции являются датчики, измеряющие угловую скорость, обычно называемые гироскопами.Возможно, в детстве у вас был гироскоп в качестве игрушки, и трудно понять взаимосвязь между этим игрушечным гироскопом, который может балансировать на конце карандаша, с устройством, которое может измерять угловую скорость. Чтобы понять, как мы можем использовать гироскоп в качестве датчика угловой скорости, нам нужно вернуться к основам вращающихся тел. Здесь у нас есть диск, который вращается вокруг оси, показанной пунктирной линией, и он вращается с угловой скоростью omega g, а диск имеет инерцию вращения j.Мы ссылаемся на угловой момент этого диска и обозначаем его символом h. h в j раз больше омега g. Теперь представим, что я прилагаю крутящий момент к этому вращающемуся диску. Если я это сделаю, диск захочет вращаться вокруг оси, показанной синей стрелкой. Это перекрестное произведение вектора h и вектора Tau.
У нас есть гироскоп, и на данный момент устройство не вращается, мы видим, что он очень свободно и красиво движется внутри своего карданного механизма. Если я включаю мотор, требуется немного времени, чтобы набрать скорость, теперь он ведет себя совсем по-другому.
Теперь я собираюсь повернуть узел вращающегося диска вокруг синей стрелки, а теперь; вращающийся диск будет оказывать крутящий момент вокруг красной стрелки, и этот крутящий момент является перекрестным произведением векторов омега и h. Итак, как мне измерить крутящий момент? Если ось диска поддерживается двумя подшипниками, то этот крутящий момент будет оказывать давление вверх на один подшипник и вниз на другой подшипник, и эти силы можно измерить. Затем вращающийся диск преобразует омега угловой скорости в крутящий момент, который затем измеряется с помощью датчиков силы.
Важно отметить, что если я потяну за эту ось гироскопа с помощью резиновой ленты, я фактически приложу к ней силу. Итак, я тяну в этом направлении. Вы увидите, что гироскоп пытается вращаться вокруг такой оси.
Датчики угловой скорости на основе вращающихся дисков уже не очень распространены. Они имеют тенденцию быть довольно громоздкими и требуют много энергии для вращения диска. Датчики сегодня основаны на вибрации, а не на вращающемся элементе, но мы по-прежнему склонны называть их гироскопами или гироскопическими датчиками.Вибрирующие элементы изготавливаются с использованием технологии «MEMS». Таким образом, сами чувствительные элементы микроскопические по размеру, но принцип тот же. Угловая скорость в датчике вызывает приложения сил или крутящих моментов к элементам микромасштаба, что приводит к смещениям, которые можно измерить и усилить для получения сигнала угловой скорости. Как и в случае с акселерометрами и магнитометрами, очень часто три датчика гироскопа помещаются в один чип, и они снова располагаются ортогонально, так что они измеряют три компонента вектора угловой скорости.Точно так же, как у вас есть акселерометры в вашей голове, у вас также есть гироскопы в вашей голове, и, опять же, они находятся во внутреннем ухе. В частности, три очень отличительных элемента, известные как полукруглые каналы. Это очень тонкие трубки, наполненные жидкостью, и вращательное движение вашей головы заставляет жидкость в этих трубках двигаться. Движение жидкости обнаруживается крошечными волосковыми клетками внутри каналов, и это приводит к сигналу угловой скорости в ваш мозг. Сигнал угловой скорости сочетается с информацией о движении, поступающей от ваших глаз.Если эти два сигнала несовместимы, это приводит к проблеме, которую мы ощущаем как укачивание, когда наше внутреннее ухо говорит нам, что наше тело движется в одном направлении, но наши глаза говорят нам, что наше тело движется в другом направлении. способ. Итак, это укачивание или морская болезнь, и наше тело довольно нелогично реагирует, желая, чтобы нас рвало.
Датчики акселерометра и гироскопа: Ope
Аннотация: Микроэлектромеханические системы (МЭМС) в бытовой электронике с каждым годом развиваются все быстрее, с растущим спросом со стороны мобильного рынка, который доминирует над развитием этой новой технологии.Датчики MEMS, по сути, становятся ключевыми элементами в разработке дифференцирующих продуктов для потребительского и мобильного рынков, таких как игровые консоли, смартфоны и планшеты. МЭМС дают пользователю новый способ взаимодействия со своим интеллектуальным устройством. Эта статья представляет собой обзор МЭМС: принцип их работы, механизм измерения и множество потенциальных приложений.
Аналогичная версия этой статьи появилась в марте 2014 года в EDN .
Введение
Микроэлектромеханические системы (МЭМС) объединяют механические и электрические компоненты в небольшие структуры в масштабе микрометра.Они сформированы комбинацией полупроводниковых и микротехнологических технологий с использованием микромашинной обработки для интеграции всей электроники, датчиков и механических элементов на общую кремниевую подложку. Основными компонентами любой системы MEMS являются механические элементы, чувствительный механизм и ASIC или микроконтроллер. В этой статье представлен обзор датчиков акселерометра MEMS и гироскопов. Мы обсуждаем принципы их работы, их сенсорный механизм, растущее разнообразие их применений и глубокое влияние, которое они уже оказывают на нашу повседневную жизнь.
MEMS как инерциальные датчики
ДатчикиMEMS находят множество применений для измерения либо линейного ускорения вдоль одной или нескольких осей, либо углового движения вокруг одной или нескольких осей в качестве входных данных для управления системой ( Рисунок 1, ).
Рис. 1. Угловое и линейное перемещение.
Все датчики акселерометра MEMS обычно измеряют смещение массы с помощью схемы интерфейса измерения положения. Затем это измерение преобразуется в цифровой электрический сигнал через аналого-цифровой преобразователь (АЦП) для цифровой обработки.Гироскопы, однако, измеряют как смещение резонирующей массы, так и ее рамки из-за ускорения Кориолиса.
Основные операции акселерометра
Второй закон движения Ньютона гласит, что ускорение (м / с 2 ) тела прямо пропорционально и в том же направлении, что и результирующая сила (Ньютон), действующая на тело, и обратно пропорционально его массе. (грамм).
| Ускорение = Сила (Ньютон) (м / с 2 ) Масса (грамм) | (Ур.1) |
Важно отметить, что ускорение создает силу, которая улавливается механизмом определения силы акселерометра. Таким образом, акселерометр действительно измеряет силу, а не ускорение; он в основном измеряет ускорение косвенно через силу, приложенную к одной из осей акселерометра.
Акселерометр – это также электромеханическое устройство, включающее отверстия, полости, пружины и каналы, которое обрабатывается с использованием технологии микротехнологии. Акселерометры изготавливаются по технологии изготовления многослойных пластин, в которых силы ускорения измеряются путем определения смещения массы относительно неподвижных электродов.
Чувствительный механизм акселерометра
Распространенным подходом к измерению, используемым в акселерометрах, является измерение емкости, в котором ускорение связано с изменением емкости движущейся массы (, рис. 2, ). Этот метод измерения известен своей высокой точностью, стабильностью, малым рассеянием мощности и простой конструкцией. Он не подвержен шуму и колебаниям в зависимости от температуры. Пропускная способность емкостного акселерометра составляет всего несколько сотен герц из-за их физической геометрии (пружины) и воздуха, заключенного внутри ИС, который действует как демпфер.
| C = (ε 0 × ε r × A) / D (Фарад) | (Уравнение 2) |
ε 0 = Допустимое свободное пространство
ε r = Допустимый относительный материал между пластинами
A = Площадь перекрытия между электродами
D = Расстояние между электродами
Рисунок 2. Подвижная масса и емкость.
Емкость может быть односторонней или дифференциальной. Давайте посмотрим на акселерометры, расположенные в виде дифференциальной пары (, рис. 3, ).Он состоит из одной подвижной массы (одна плоская поверхность), которая размещается вместе с механической пружиной между двумя фиксированными эталонными кремниевыми подложками или электродами (другая плоская поверхность). Очевидно, что движение массы (Движение x) происходит относительно неподвижных электродов (d1 и d2) и вызывает изменение емкостей (C1 и C2). Вычисляя разницу между C2 и C1, мы можем определить смещение нашей массы и ее направление.
Рис. 3. Ускорение, связанное с одиночной движущейся массой.
Смещение подвижной массы (микрометр) вызвано ускорением и создает чрезвычайно небольшое изменение емкости для правильного обнаружения (уравнение 1). Это требует использования нескольких подвижных и неподвижных электродов, соединенных параллельно. Конфигурация обеспечивает большее изменение емкости, которое может быть обнаружено более точно, и, в конечном итоге, делает измерение емкости более осуществимым методом.
Давайте быстро подведем итоги.Сила вызывает смещение массы, что, в свою очередь, вызывает изменение емкости. Теперь, если разместить несколько электродов параллельно, можно получить большую емкость, которую будет легче обнаружить (, рис. 4, ). V1 и V2 являются электрическими соединениями с каждой стороной конденсаторов и образуют делитель напряжения с центральной точкой как напряжение нашей массы.
Рисунок 4. Ускорение, связанное с несколькими движущимися массами.
Аналоговое массовое напряжение проходит через усиление заряда, преобразование сигнала, демодуляцию и фильтрацию нижних частот, прежде чем оно будет преобразовано в цифровую область с помощью сигма-дельта АЦП.Последовательный цифровой поток битов от АЦП затем передается в буфер FIFO, который преобразует последовательный сигнал в параллельный поток данных. Затем этот параллельный поток данных может быть преобразован с использованием последовательного протокола, такого как I 2 C или SPI, прежде чем он будет отправлен на хост для дальнейшей обработки ( Рисунок 5, ).
Рисунок 5. Электрическая схема акселерометра.
Сигма-дельта АЦП хорошо подходит для приложений акселерометра из-за его низкой полосы пропускания сигнала и высокого разрешения.С выходным значением, определяемым его количеством битов, сигма-дельта АЦП может быть очень легко преобразован в единицы измерения «g» для приложения акселерометра. «G» – единица ускорения, равная силе тяжести Земли на уровне моря:
Например, если показание по оси X нашего 10-битного АЦП равно 600 из доступных 1023 (2 10 – 1 = 1023), и с 3,3 В в качестве эталона, мы можем получить напряжение для ось X, указанная в «g» следующим уравнением:
| X – напряжение = (600 × 3.3) / 1023 = 1,94 В | (Уравнение 3) |
Каждый акселерометр имеет нулевой уровень напряжения, то есть напряжение, соответствующее 0g. Сначала мы вычисляем сдвиги напряжения от напряжения нулевого ускорения (указанного в техническом паспорте и принимаемого равным 1,65 В) как:
| 1,94 В – 1,65 В = 0,29 В | (Уравнение 4) |
Теперь, чтобы выполнить окончательное преобразование, мы разделим 0,29 В на чувствительность акселерометра (указанную в таблице данных и принимаемую равной 0.475В / г):
| 0,29 В / 0,475 В / г = 0,6 г | (Уравнение 5) |
A Многоосевой акселерометр
Давайте еще раз посмотрим на наш рисунок 3 и добавим фактический изготовленный акселерометр (, рисунок 6, ). Теперь мы можем четко связать каждый компонент акселерометра с его механической моделью.
Рисунок 6. Механическая модель реального акселерометра.
Просто установив акселерометр по-другому (90 градусов, показано на рис. 7, ), мы можем создать 2-осевой акселерометр, необходимый для более сложных приложений.
Рис. 7. 2-осевой акселерометр.
Есть два способа сконструировать двухосевой акселерометр: расположить два разных одноосных датчика акселерометра перпендикулярно друг другу или использовать одну гирю с емкостными датчиками, расположенными для измерения движения по обеим осям.
Выбор акселерометра
При выборе акселерометра для конкретного приложения важно учитывать некоторые из его ключевых характеристик:
- Полоса пропускания (Гц) : полоса пропускания датчика указывает диапазон частот вибрации, на которые реагирует акселерометр, или как часто можно получить надежные показания.Люди не могут создавать движения тела за пределами диапазона от 10 Гц до 12 Гц. По этой причине полоса пропускания от 40 Гц до 60 Гц является достаточной для определения наклона или движения человека.
- Чувствительность (мВ / г или младший значащий бит / г) : чувствительность – это мера минимального обнаруживаемого сигнала или изменения выходного электрического сигнала при изменении входного механического изменения. Это действительно только для одной частоты.
- Плотность шума напряжения (мкг / SQRT Гц) : шум напряжения изменяется пропорционально обратному квадратному корню из ширины полосы.Чем быстрее мы считываем изменения акселерометра, тем хуже получаем точность. Шум в большей степени влияет на характеристики акселерометров при работе в условиях меньшего ускорения и меньшего выходного сигнала.
- Нулевое напряжение : этот термин определяет диапазон напряжений, которые можно ожидать на выходе при ускорении 0g.
- Частотная характеристика (Гц) : это частотный диапазон, указанный с диапазоном допуска (± 5% и т. Д.), Для которого датчик обнаруживает движение и сообщает истинный выходной сигнал.Указанный допуск диапазона позволяет пользователю рассчитать, насколько чувствительность устройства отклоняется от эталонной чувствительности на любой частоте в пределах указанного диапазона частот.
- Динамический диапазон (g) : это диапазон между наименьшей обнаруживаемой амплитудой, которую акселерометр может измерить, до наибольшей амплитуды перед искажением или ограничением выходного сигнала.
Акселерометр против гироскопа
Прежде чем описывать некоторые приложения MEMS, мы должны понять разницу между акселерометром и гироскопом.Акселерометры измеряют линейное ускорение (указанное в мВ / г) вдоль одной или нескольких осей. Гироскоп измеряет угловую скорость (указывается в мВ / град / с). Если мы возьмем наш акселерометр и наложим на него вращение (то есть крен) (, рис. 8, ), расстояния d1 и d2 не изменятся. Следовательно, выходной сигнал акселерометра не будет реагировать на изменение угловой скорости.
Рисунок 8. Устойчивость акселерометра к вращению.
Мы можем сконструировать датчик по-разному, так что внутренняя рамка, содержащая резонирующую массу, соединена с подложкой пружинами под углом 90 градусов относительно резонирующего движения ( Рис. 9 ).Затем мы можем измерить ускорение Кориолиса путем измерения емкости на электродах, установленных между внутренней рамой и подложкой.
Рис. 9. Внутреннее изображение и изображение подложки относительно движущейся массы.
Приложения для акселерометра и гироскопа
Акселерометрыдолгое время использовались в автомобилях для обнаружения аварий и срабатывания подушек безопасности в нужный момент. У них есть много приложений на мобильных устройствах, таких как переключение между портретным и ландшафтным режимами, жесты касания для перехода к следующей песне, постукивание по одежде, когда устройство находится в кармане, или захват с размытием и оптическая стабилизация изображения.
Внутренняя навигация
Ускорение – это скорость изменения скорости
| α = δv / δ t = δ 2 x / δt 2 | (Уравнение 6) |
Мы можем получить информацию о скорости и расстоянии из выходных данных ускорения путем простого или двойного интегрирования соответственно. Добавляя измерения, полученные с помощью гироскопов, мы можем использовать специальную технику для отслеживания положения и ориентации объекта относительно известной начальной точки.Эта информация используется для навигации в помещении без внешнего опорного сигнала или сигнала GPS (, рисунок 10, ).
Рисунок 10. Акселерометр для навигации в помещении.
Оптическая стабилизация изображения
Человеческие руки дрожат с очень низкой частотой (от 10 Гц до 20 Гц). При съемке с помощью наших последних небольших и легких смартфонов и камер мы вызываем дрожание, которое размывает изображение. Такие функции, как оптический зум, усугубляют эту проблему и вызывают еще большее размытие.
Рассмотрим датчик с горизонтальным дрейфом 0,08 градуса при использовании камеры SVGA с разрешением 800×600 пикселей для угла обзора 45 градусов. 45/800 = 0,056 градуса, что соответствует размытию 1,42 пикселя. По мере увеличения разрешения камеры размытие охватывает большее количество пикселей и вызывает большее искажение изображения.
Рисунок 11. Размытие изображения устраняется с помощью оптической стабилизации изображения.
Оптическая стабилизация изображения на основе гироскопа (, рис. 11, ) с корректирующим программным обеспечением может компенсировать размытие изображения, отправляя данные измерений механического гироскопа на микроконтроллер и линейный двигатель для перемещения датчика изображения.
Управление на основе жестов
Мы можем использовать датчики акселерометра MEMS для управления беспроводной мышью на основе жестов, управления направлением кресла-каталки или гироскопа в консоли Wii ® . Другие примеры включают интеллектуальное устройство, использующее жесты для управления курсором на телевизоре или «виртуальные» ручки, или даже жестовые команды для управления внешними устройствами с помощью портативного беспроводного сенсорного блока.
Заключение
Акселерометры и гироскопыMEMS уже давно используются в широком спектре приложений в судоходстве, космосе, промышленной робототехнике и автомобилях.Но универсальность их приложений теперь распространилась на смартфоны, где они дают нам новый способ взаимодействия с нашим интеллектуальным устройством для управления движением и жестами. Понимание поведения МЭМС и характеристик акселерометра или гироскопа позволяет разработчикам разрабатывать более эффективные и недорогие продукты для приложений большого объема. Эти устройства MEMS также позволяют нам создавать новые приложения, которые коренным образом меняют то, как наши движения, движения тела и жесты влияют на наш образ жизни.
Как измерить угловое движение с помощью гироскопа
Измерение углового движения может быть важным в самых разных приложениях, включая спортивную биомеханику и астрономию.В этом сообщении блога я расскажу, как определять вращение и что необходимо для вычисления угловой скорости. Затем я расскажу, как измерить вращение и что требуется (включая формулы) для вычисления угловой скорости с помощью акселерометра. Существует множество акселерометров и систем сбора данных, которые могут помочь измерить как ориентацию, так и ускорение, но для этого поста я буду использовать один из датчиков enDAQ моей компании, поскольку он оснащен встроенными гироскопами и акселерометрами.
Я закрою:
Справочная рамка
Чтобы определить вращение (и, в более широком смысле, угловую скорость и ускорение), сначала необходимо определить некоторые термины:
Векторная основа
Векторный базис – это набор некомпланарных векторов, которые используются для определения ориентации.Векторные базы могут иметь дополнительные свойства, например:
- Ортогональные – базисные векторы взаимно ортогональны. Ортогональные векторные базисы также жесткие по определению
- Нормальный – все базисные векторы являются единичными векторами
- Rigid – углы между базисными векторами постоянны. Это привносит в основу ощущение времени, поскольку время должно быть определено, чтобы углы не менялись с течением времени.
Справочная рамка
Опорный кадр – это бесконечный набор неколлинеарных точек, где расстояние между любыми двумя точками постоянно. И снова термин «постоянная» подразумевает чувство времени. Справочные рамки определяют как положение, так и ориентацию. Удобный способ определения системы отсчета N – использовать точку и базис ортонормированного вектора, зафиксированный в N . Системы отсчета могут быть ньютоновскими или неньютоновскими:
- Ньютоновская опорная система – (также известная как инерциальная опорная система) неускоряющаяся (включая невращающуюся) опорную систему, в которой точно предсказывается все движение.Земля – это неньютоновская система отсчета, однако ее часто можно аппроксимировать как ньютоновскую систему отсчета.
- Неньютоновская система отсчета – ускоряющаяся система отсчета, в которой не применяется.
В этом руководстве мы ограничимся трехмерными базисами ортонормированных векторов. Ориентация и ее производные (угловая скорость и ускорение) могут быть определены без указания каких-либо точек, поэтому они могут быть определены в терминах пары базисов векторов.Поскольку системы отсчета содержат векторные базы, ориентацию также можно определить в терминах двух систем отсчета. Положение и его производные (скорость и ускорение) определяются между двумя точками и, следовательно, требуют определения по крайней мере одной системы отсчета.
Ориентация
Ориентация твердого тела определяется выравниванием между векторным базисом, прикрепленным к телу, и другим векторным базисом или системой отсчета. Для целей этого руководства мы будем рассматривать ориентацию тела B (определяемую ортонормированными базисными векторами) в мировой системе отсчета W (определяемой ортонормированными базисными векторами).Есть несколько способов определить ориентацию B в W .
- Матрица вращения – матрица вращения b R w , которая определяется таким образом, что:
- Углы Эйлера – последовательные повороты вокруг базисных векторов b . Эти повороты могут выполняться в любом порядке, например, XYZ или YZY .
- Параметры Эйлера (кватернионы) – Любое вращение (и), которое может быть выражено с помощью любого из двух предыдущих методов, также может быть выражено как одно вращение θ вокруг единичного вектора.фиксируется как в W, , так и в B для этого поворота, а θ – это угол между двумя произвольными векторами (фиксированными в W ) и (фиксированными в B ), которые изначально равны. Следует отметить, что фиксируется только для этого вращения, и не гарантируется, что он останется фиксированным для последующих вращений. Вращение с использованием параметров Эйлера можно удобно выразить и эффективно вычислить с помощью кватернионов.
Преобразование между этими формами может быть выполнено с использованием формул, приведенных в этом Техническом обзоре НАСА [2].
Кватернионы
Кватернион – это гиперкомплексное число в форме
.| (1) |
где
| (2) |
В этом документе кватернионы будут выделены жирным шрифтом. Более удобный способ выразить (1) – это сумма скаляра и вектора
| (3) |
Есть несколько свойств и определений кватернионов, которые будут иметь отношение к этому анализу.
Таблица 1: Свойства и определения кватернионов
Как упоминалось ранее, кватернионы – удобный способ выразить параметры Эйлера (вращения). Это можно сделать, переписав (3) как кватернион
.| (4) |
Предположим, что это вектор в основе тела B . можно выразить как чистый кватернион
| (5) |
Предположим также, что преобразование между основанием тела B и мировой системой отсчета W достигается поворотом на θ вокруг, выраженным с помощью кватерниона единицы q , как определено в (4) .Преобразование в мир рамы W можно сделать с помощью
| (6) |
Эта операция известна как поворот кадра, потому что опорный кадр вращается, а сам вектор не изменяется. Доказательство этого соотношения можно найти в [3].
Угловая скорость
Угловая скорость тела B , выраженная в мировой системе координат W , обозначается как. При работе с вращениями возникает соблазн выразить угловую скорость вращающейся рамы как
.однако это действительно только в том случае, если остается фиксированным в обоих кадрах! Если меняется, угловая скорость равна
.| (7) |
| (8) |
, доказательство которого можно найти в [4].Поскольку является вектором, его необходимо дифференцировать в системе отсчета (или в векторном базисе). Оказывается, производная по времени одинакова как в мировой системе отсчета, так и в основе тела. Используя (4), (7) можно записать как
| (9) |
где. Это уравнение можно доказать несколькими способами [1] [3]. При численном решении (9) действительная часть может быть отличной от нуля, однако этим можно пренебречь в разумном приближении.
Разгон
Помимо вычисления угловой скорости, кватернионы также могут использоваться для преобразования данных акселерометра между опорными кадрами.Ускорение определяется положением и, следовательно, должно определяться в системе отсчета, а не в векторной основе. Наиболее удобный способ формирования системы отсчета в этом случае – с точечным и векторным базисом. Выбор этой точки произвольный, так как ускорение одной системы отсчета в другой не зависит от абсолютного расстояния между любыми двумя точками. Любой вектор, например ускорение, можно преобразовать из одного опорного кадра в другой с помощью уравнения (6).
Следует отметить, что мировая система отсчета является неньютоновской системой отсчета из-за вращения Земли.Этот эффект может иметь или не иметь отношения к вашим измерениям, в зависимости от приложения и продолжительности сбора данных.
Применение для датчиков enDAQ
ДатчикиenDAQ оснащены блоком IMU, который выводит данные об ориентации в виде массива кватернионов. Эти кватернионы обеспечивают векторную основу датчика enDAQ D (определенную на рисунке 1) в одной из двух возможных базовых данных в каждой точке сбора данных.
Рис. 1. Датчик enDAQ S4 с базисными векторами, обозначенными
Две возможные справочные базы связаны с тем, как ориентация рассчитывается IMU:
- Абсолютная ориентация – Ориентация рассчитывается с помощью гироскопа с поправками от акселерометра и магнитометра.За основу берется мировая основа W , которая образуется путем направления на север, направления противоположно вектору силы тяжести и формирования правой системы
- Относительная ориентация – Ориентация рассчитывается с помощью гироскопа с поправками только от акселерометра. Базис D 0 совпадает с базисом датчика enDAQ D в первой точке сбора данных
Более подробную информацию о преимуществах и недостатках этих двух систем можно найти в этом сообщении блога enDAQ: Кватернионы для ориентации.
Гироскоп в IMU измеряет угловую скорость, а затем интегрирует, чтобы найти ориентацию. Это означает, что мы можем дифференцировать ориентацию, чтобы найти угловую скорость, не беспокоясь об усилении шума. На рисунке 2 сравнивается угловая скорость, рассчитанная с использованием (9), и угловая скорость, измеренная непосредственно IMU. Следует отметить, что IMU в датчике enDAQ не может одновременно обеспечивать кватернион ориентации и исходную угловую скорость IMU, поэтому данные на рисунке 2 были получены двумя датчиками enDAQ, установленными на одной и той же вращающейся поверхности.Небольшие различия между ними являются результатом различных уровней шума, а также несовершенства взаимной корреляции двух сигналов.
Рис. 2. Угловая скорость, рассчитанная путем дифференцирования кватерниона и полученная непосредственно из IMU
Получение угловой скорости и ускорения от датчика enDAQ IMU
- Отформатируйте датчик enDAQ, выбрав абсолютную или относительную ориентацию.
- Получите данные.
- Численно дифференцируйте массив кватернионов, чтобы найти, используя
Эти лекции дают хороший обзор методов конечных разностей численного интегрирования. - Рассчитайте угловую скорость и ускорение для базиса enDAQ D в базисе A (где A – это либо мировой базис W , либо исходный базис D 0 ) численно, используя уравнение ( 9) и Таблицу 1.
где. - Выбранный вами базис может быть не самым удобным для выражения угловой скорости, поэтому его можно преобразовать в новый базис N с помощью
, где q – кватернион, описывающий преобразование между A и N .
Преобразование ускорения датчика enDAQ с использованием кватернионов
Кватернионный массив также может использоваться для преобразования данных ускорения из вращающегося опорного кадра датчика enDAQ в стационарный опорный кадр в каждой точке сбора данных с использованием
, где D – опорный кадр enDAQ, а A – либо мировой опорный кадр W , либо начальный опорный кадр D 0 в зависимости от того, находится ли блок в режиме абсолютного или относительного положения.