
Решение неоднородных дифференциальных уравнений третьего порядка
Теорию вычислений неоднородных дифференциальных уравнений (ДУ) приводить в данной публикации не будем, из предыдущих уроков Вы можете найти достаточно информации, чтобы найти ответ на вопрос “Как решить неоднородное дифференциальное уравнение?” Степень неоднородного ДУ здесь большой роли не играет, не так уж и много имеется способов, которые позволяют вычислить решение подобных ДУ. Чтобы Вам было легко читать ответы в примерах основной акцент сделан только на методику вычислений и подсказки, которые облегчат вывод конечной функции.
Пример 1. Решить дифференциальное уравнение
Решение: Задано однородное дифференциальное уравнение третьего порядка, причем оно содержит лишь вторую и третью производные и не имеет функции и ее первой производной. В таких случаях применяют метод понижения степени дифференциального уравнения. Для этого вводят параметр – обозначим вторую производную через параметр p
Для этого вводят параметр – обозначим вторую производную через параметр p
тогда третья производная функции равна
Исходное однородное ДУ упростится к виду
Записываем его в дифференциалах, далее сводим к уравнению с разделенными переменными и находим решение интегрированием
Вспоминаем что параметр это вторая производная функции
поэтому для нахождения формулы самой функции дважды интегрируем найденную дифференциальную зависимость
В функции сталые C1, C2, C3 – равны произвольным значениям.
Вот так просто выглядит схема позволяющая найти общее решение однородного дифференциального уравнения методом введения параметра. Следующие задачи более сложные и из них вы научитесь решать неоднородные дифференциальные уравнения третьего порядка. Между однородными и неоднородными ДУ в плане вычислений является некоторое различие, в этом Вы сейчас убедитесь.
Пример 2. Найти общее решение дифференциального уравнения
Найти общее решение дифференциального уравнения
Решение:Имеем неоднородное дифференциальное уравнение третьего порядка. Поэтому его решение следует искать в вид суммы двух – решения однородного и частного решения неоднородного уравнения
Решим сначала однородное дифференциальное уравнение
Как видите оно содержит только вторую и третью производную функции и не содержит самой функции. Такого сорта диф. уравнения решают методом введения параметра, что в в свою очередь снижает и упрощает нахождение решения уравнения. На практике это выглядит следующим образом: пусть вторая производная равна определенной функции , тогда третья производная формально будет иметь запись
Рассмотренное однородное ДУ 3 порядка преобразуется к уравнению первого порядка
откуда разделяя переменные находим интеграл
x*dp-p*dx=0;
Сталые в таких задачах рекомендуем нумеровать, поскольку решение дифференциального уравнения 3 порядка имеет 3 постоянные, четвертого – 4 и и дальше по аналогии. Теперь возвращаемся к введенному параметру: поскольку вторая производная имеет вид то интегрируя ее один раз мы имеем зависимость для производной функции
Теперь возвращаемся к введенному параметру: поскольку вторая производная имеет вид то интегрируя ее один раз мы имеем зависимость для производной функции
и повторным интегрированием находим общий вид однородной функции
Частичное решение уравнения запишем в виде переменной умноженной на логарифм. Это следует из того что правая (неоднородная) часть ДУ равна -1/x и чтобы получить эквивалентную запись
следует решение искать в виде
Найдем коэффициент A, для этого вычислим производные первого и второго порядков
Подставим найденные выражения в исходное дифференциальное уравнение и приравняем коэффициенты при одинаковых степенях x:
Сталая равна -1/2, а решение неоднородного уравнения имеет вид
Общее решение дифференциального уравнения записываем в виде суммы найденных
где C1, C2, C3– произвольные константы которые можно уточнить с задачи Коши.
Пример 3. Найти интеграл ДУ третьего порядка
Решение:Ищем общий интеграл неоднородного ДУ третьего порядка в виде суммы решения однородного и частичного неоднородного уравнения . Сначала для любого типа уравнений начинаем анализировать однородное дифференциальное уравнение
Оно содержит только вторую и третью производные неизвестной пока функции. Вводим замену переменных (параметр): обозначим за вторую производную
Тогда третья производная равна
Такие же преобразования выполняли в предыдущем задании. Это позволяет свести дифференциальное уравнения третьего порядка к уравнению первого порядка вида
Интегрированием находим решение однородного уравнения
Вспоминаем, что в соответствии с заменой переменных это всего лишь вторая производная
а чтобы найти решение однородного дифференциального уравнения третьего порядка ее нужно дважды проинтегрировать
Исходя из вида правой стороны (неоднородной части =x+1), частичное решение уравнения ищем в виде
Как знать в каком виде искать частичный решение Вас должны были научить в теоретической части курса дифференциальных уравнений. Если нет, то можем только подсказать, что за функцию выбирают такое выражение чтобы при подстановке в уравнение слагаемое, содержащее старшую производную или моложе был одного порядка (подобный) с неоднородной частью уравнения
Если нет, то можем только подсказать, что за функцию выбирают такое выражение чтобы при подстановке в уравнение слагаемое, содержащее старшую производную или моложе был одного порядка (подобный) с неоднородной частью уравнения
Думаю теперь Вам понятнее, откуда берется вид частного решения. Найдем коэффициенты A, B, для этого вычисляем вторую и третью производную функции
и подставляем в дифференциальное уравнение. После группировки подобных слагаемых получим линейное уравнение
из которого при одинаковых степенях переменной составляем систему уравнений
и находим неизвестные сталые. После их подстановки частичное решение уравнения выражается зависимостью
Общее решение дифференциального уравнения равно сумме однородного и частичного и имеет вид
где С1, С2, С3 – произвольные константы.
Пример 4. Решить дифференциальное уравнение
Решение:Имеем неоднородное дифференциальное уравнение третьего порядка решение которого будем находить через сумму . Схема вычислений Вам известна, поэтому переходим к рассмотрению однородного дифференциального уравнения
Схема вычислений Вам известна, поэтому переходим к рассмотрению однородного дифференциального уравнения
По стандартной методике вводим параметр
Исходное дифференциальное уравнение примет вид , откуда разделив переменные находим интеграл однородного уравнения
Вспоминаем что параметр равен второй производной
Интегрируя ДУ получим первую производную функции
Повторным интегрированием находим общий интеграл однородного дифференциального уравнения
Частичное решение уравнения ищем в виде , так как правая часть равна
Найдем коэффициент A – для этого подставим y* в дифференциальное уравнение и приравняем коэффициент при одинаковых степенях переменной
После подстановки и группировки слагаемых получим зависимость
из которой сталая равна A=8/3.
Таким образом, можем записать частичное решение ДУ
Общее решение дифференциального уравнения равно сумме найденных
где С1, С2, С3 – произвольные константы. Если заданно условие Коши, то их очень легко можем доопределить.
Если заданно условие Коши, то их очень легко можем доопределить.
Считаю, что материал Вам пригодится при подготовке к практическим занятиям, модулям или контрольной работе. Здесь не разбирали задачу Коши, однако из предыдущих уроков Вы в целом знаете как это сделать.
Алгоритм решения линейных систем дифференциальных уравнений третьего порядка.
Алгоритм решения линейных систем дифференциальных уравнений третьего порядка.
Для более глубокого понимания происходящего в этой статье можно ознакомиться с краткой теоретической справкой.Рассмотрим однородную систему дифференциальных уравнений третьего порядка
Здесь x(t), y(t), z(t) – искомые функции на промежутке (a, b), aij (i, j =1, 2, 3) – вещественные числа.
Запишем исходную систему в матричном виде
,
где
Решение исходной системы будем искать в виде
,
где , C1, C2, C3 – произвольные постоянные.
Чтобы найти фундаментальную систему решений, нужно решить так называемое характеристическое уравнение
Это уравнение является алгебраическим уравнением третьего порядка, следовательно оно имеет 3 корня. При этом возможны следующие случаи:
При этом возможны следующие случаи:
1. Корни (собственные значения) действительны и различны.
2. Среди корней (собственных значений) есть комплексно-сопряженные, пусть
– действительный корень
=
3. Корни (собственные значения) действительны. Один из корней кратный.
Чтобы разобраться, как действовать в каждом из этих случаев, нам понадобятся:
Теорема 1.
Пусть – попарно различные собственные значения матрица А, а – соответствующие им собственные векторы. Тогда
образуют фундаментальную систему решений исходной системы.
Замечание.
Пусть – действительное собственное значение матрица А (действительный корень характеристического уравнения), – соответствующий ему собственный вектор.
(Re – действительная часть, Im – мнимая)
образуют фундаментальную систему решений исходной системы.
 (Т.е. и = рассматриваются вместе)
(Т.е. и = рассматриваются вместе)Теорема 3.
Пусть – корень характеристического уравнения кратности 2. Тогда исходная система имеет 2 линейно независимых решения вида
,
где , – постоянные вектора. Если же кратности 3, то существует 3 линейно независимых решения вида
.
Векторы находятся подствалением решений (*) и (**) в исходную систему.
Теперь рассмотрим более подробно каждый из вышеописанных случаев.
1. Алгоритм решения однородных систем дифференциальных уравнений третьего порядка в случае различных действительных корней характеристического уравнения.
Дана система
1) Составляем характеристическое уравнение
– действительные и различные собственные значения 9корни этого уравнения).
2)Строим , где
– собственный вектор матрицы А, соответствующий , т.
3)Строим , где
– собственный вектор матрицы А, соответствующий , т.е. – любое решение системы
4)Строим , где
– собственный вектор матрицы А, соответствующий , т.е. – любое решение системы
5)
составляют фундаментальную систему решений. Далее записываем общее решение исходной системы в виде
,
здесь C1, C2, C3 – произвольные постоянные,
,
или в координатном виде
Расмотрим несколько примеров:
Пример 1.
1)Составляем и решаем характеристическое уравнение:
2) Находим
3)Находим
4)Вектор-функции
образуют фундаментальную систему. Общее решение имеет вид
или в координатной записи
Пример 2.
1)Составляем и решаем характеристическое уравнение:
2) Находим
3)Находим
4)Находим
5)Вектор-функции
образуют фундаментальную систему. Общее решение имеет вид
Общее решение имеет вид
или в координатной записи
2. Алгоритм решения однородных систем дифференциальных уравнений третьего порядка в случае комплексно-сопряженных корней характеристического уравнения.
1) Составляем и решаем характеристическое уравнение
– действительный корень,
2)Строим , где
| – собственный вектор матрицы А, соответствующий , т.е удовлетворяет системе |
3) Строим
(т.е. и рассматриваем вместе), где
| – собственный вектор матрицы А, соответствующий , т.е. удовлетворяет системе |
Здесь Re – действительная часть
4) составляют фундаментальную систему решений. Далее записываем общее решение исходной системы:
, где
С1, С2,С3 произвольные постоянные.

Пример 1.
1) Составляем и решаем характеристическое уравнение
2)Строим
| , где удовлетворяет системе | , т.е. |
3) Строим
, где
| – удовлетворяет системе | , т.е. |
Первое уравнение сократим на 2. Затем ко второму уравнению прибавим первое, умноженное на 2i, а от третьего уравнения отнимем перове, умноженное на 2.
Далее
Следовательно,
4) – фундаментальная система решений. Запишем общее решение исходной системы:
Пример 2.
1) Составляем и решаем харктеристическое уравнение
2)Строим
(т.е. и рассматриваем вместе), где
-собственный вектор матрицы А, соответствующий , т. |
Второе уравнение умножим на (1-i) и сократим на 2.
Следовательно,
3) – фундаментальная система решений.
Общее решение исходной системы
или
2. Алгоритм решения однородных систем дифференциальных уравнений третьего порядка в случае кратных корней характеристического уравнения.
Составляем и решаем характеристическое уравнение
Возможны два случая:
Рассмотрим случай а) 1) , где
| – собственный вектор матрицы А, соответствующий , т.е удовлетворяет системе |
2) Сошлемся на Теорему 3, из которой следует, что существуют два линейно независимых решения вида
,
где , – постоянные векторы. Их возьмем за .
3) – фундаментальная система решений.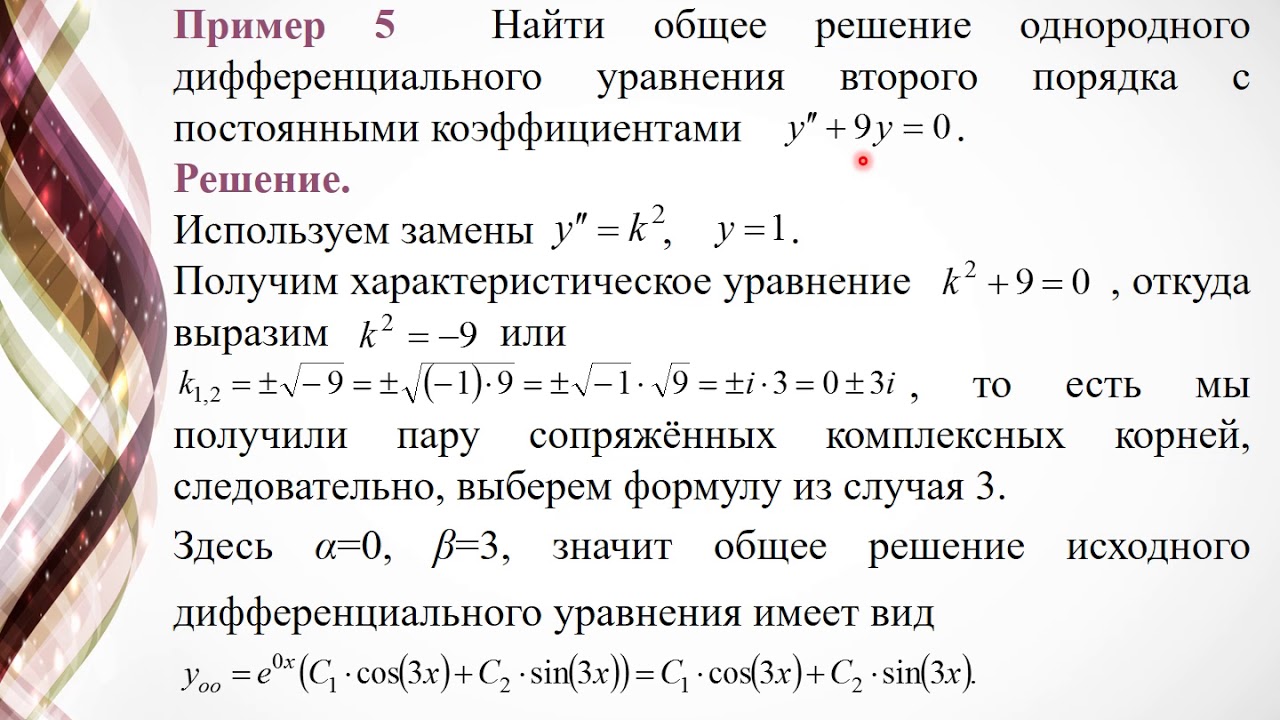 Далее записываем общее решение исходной системы:
Далее записываем общее решение исходной системы:
Рассмотрим случай б):
1) Сошлемся на Теорему 3, из которой следует, что существует три линейно независимых решения вида
,
где , , – постоянные векторы. Их возьмем за .
2) – фундаментальная система решений. Далее записываем общее решение исходной системы.
Чтобы лучше понять как находить решения вида (*), рассмотрим несколько типичных примеров.
Пример 1.
Составляем и решаем характеристическое уравнение:
Имеем случай а)
1) Строим
, где
| – любое решение системы | , т.е. |
Из второго уравнения вычитаем первое:
? третья строка подобна второй, ее вычеркиваем. Из первого уравнения вычтем второе:
2) = 1 (кратность 2)
Этому корню по Т.3 должно соответствовать два линейно независимых решения вида .
Попробуем найти все линейно незваисимые решения, у которых , т.е. решения вида
.
Такой вектор будет решением тогда и только тогда, когда – собственный вектор, соответствующий =1, т.е.
, или
, вторая и третья строки подобны первой, выкидываем их.
Система свелась к одному уравнению. Следовательно, имеется два свободных неизвестных, например, и . Дадим им сначала значения 1, 0; потом значения 0, 1. Получим такие решения:
.
Следовательно, .
3) – фундаментальная система решений. Осталось записать общее решение исходной системы:
.
Составляем и решаем характеристическое уравнение:
Имеем случай а).
1) Строим
,
| где | , т.е. |
За возьмем
.Тогда
2) =-1 (кратности 2).
Этому корню по Т.3 соответствуют два линейно независимых решения вида .
Попробуем найти линейно независимые решения, у которых , т.е. решения вида
Но тогда будет собственным вектором, соответствующим =-1, т.е. , т.е.
Третья строка аналогична второй, отбрасываем ее.
Пусть C3=1, тогда
| = |
Итак, корню =-1 соответствует (в отличие от пример 1) один линейно независимый вектор . Любой другой собственный вектор имеет вид . Таким образом существует только одно решение вида . Следовательно,
.
Следующий вектор фундаментальной системы решений будем искать в виде
Чтобы понять, как искать и в этом случае, воспользуемся матричной записью системы:
Подставим X3 в эту систему:
Сократим на e-t и приравняем коэффициенты при одинаковых степенях t. Получаем систему
Из первого уравнения и условия следует, что – собственный вектор, отвечающий собственнуму значению , т. е.
е.
| [ | нашли, когда искали | Х2] |
Второе уравнение последней системы запишем так:
Этому матричному уравнению соответствует система линейных уравнений:
Вычеркнем третью строку (она подобна второй). Система совместна (имеет решение) при любом с. Пусть с=1.
Выпишем какое-нибудь частное решение последней системы.
a3=0, a2=-1, a1=1 т.е.
Тогда
3) – фундаментальная система решений. Выпишем общее решение исходной системы:
или
3. Дифференциальные уравнения высших порядков. 3.1. Основные понятия
Дифференциальные уравнения, имеющие второй и более высокий порядок, называют дифференциальными уравнениями высших порядков. С целью более компактного изложения материала будем в основном рассматривать дифференциальные уравнения второго порядка. При этом определения и теоремы формулируются в таком виде, который позволяет естественным образом распространить их на дифференциальные уравнения любого порядка.
При этом определения и теоремы формулируются в таком виде, который позволяет естественным образом распространить их на дифференциальные уравнения любого порядка.
Определение. Задачей Коши для дифференциального уравнения второго порядка называют задачу об отыскании решения этого уравнения, удовлетворяющего допустимым начальным условиям , .
Приведем без доказательства теорему, в которой формулируются условия существования и единственности решения задачи Коши для ДУ второго порядка.
Теорема Коши (о существовании и единственности решения задачи Коши).
Если в дифференциальном уравнении его правая частьКак функция трех переменных непрерывна в некоторой области и имеет в этой области непрерывные частные производные , по переменным ,, то для любой точки в некотором интервале существует единственное решение этого уравнения, удовлетворяющее начальным условиям.
Как указывалось ранее, дифференциальное уравнение имеет бесконечно много решений. Для того чтобы в компактной форме задать множество решений дифференциального уравнения второго порядка обычно используют два независимо изменяющихся числовых параметра (две произвольных постоянных) И .
Для того чтобы в компактной форме задать множество решений дифференциального уравнения второго порядка обычно используют два независимо изменяющихся числовых параметра (две произвольных постоянных) И .
Определение. Множество функций называют общим решением дифференциального уравнения второго порядка, если:
1) При любых допустимых значениях параметров функция является некоторым решением, которое коротко называют частным решением;
2) Любое решение задачи Коши может быть представлено в виде при некоторых значениях параметров .
Уравнение , определяющее общее решение как неявную функцию, при этом называют общим интегралом дифференциального уравнения второго порядка.
Уравнение , определяющее частное решение как неявную функцию, при этом называют частным интегралом дифференциального уравнения второго порядка.
Если для дифференциального уравнения второго порядка найдено его общее решение , то частное решение задачи Коши можно получить, решив систему двух уравнений относительно переменных .
Пример. Покажем, что функция Является решением дифференциального уравнения второго порядка .
Найдем производные первого и второго порядка данной функции: , . Подставив функции в данное уравнение, получим тождество . Следовательно, функция Является решением данного дифференциального уравнения.
Пример. Найти допустимое множество Существования и единственности решения уравнения второго порядка
В соответствии с теоремой Коши в область Входят те точки пространства , где существует и непрерывна правая часть Дифференциального уравнения, т. е. множество ; те точки пространства, где существует и непрерывна частная производная По переменной , т. е. множество и те точки пространства, где существует и непрерывна частная производная По переменной , т. е. открытое множество . Далее находится пересечение указанных множеств, равное . Окончательно, учитывая требование связности, допустимое множество Выбирают в виде или в виде . {x} $$
{x} $$
Общее решение для дифференциального уравнения третьего порядка
Общее решение для дифференциального уравнения третьего порядкаСеть обмена стеков
Сеть Stack Exchange состоит из 178 сообществ вопросов и ответов, включая Stack Overflow, крупнейшее и пользующееся наибольшим доверием онлайн-сообщество, где разработчики могут учиться, делиться своими знаниями и строить свою карьеру.
Посетить Stack Exchange- 0
- +0
- Авторизоваться Подписаться
Mathematics Stack Exchange – это сайт вопросов и ответов для людей, изучающих математику на любом уровне, и профессионалов в смежных областях. Регистрация займет всего минуту.
Регистрация займет всего минуту.
Кто угодно может задать вопрос
Кто угодно может ответить
Лучшие ответы голосуются и поднимаются наверх
Спросил
Просмотрено 14к раз
$ \ begingroup $У меня не получается запустить следующую задачу для общего решения:
$ x ^ 3y ” ‘+ x ^ 2y’ ‘-2xy’ + 2y = 2x ^ 4 $ для $ x> 0 $
Мне кажется, что это можно упростить до уравнения, с которым легче работать, но я не уверен, что это за изменение переменной или упрощение. 2 y’ ‘- 2 x y’ + 2 y = 0 $ является дифференциальным уравнением Коши-Эйлера третьего порядка.4 $ для некоторой постоянной $ C $. Добавьте это частное решение к общему решению однородного уравнения, и вы получите общее решение вашего уравнения.
2 y’ ‘- 2 x y’ + 2 y = 0 $ является дифференциальным уравнением Коши-Эйлера третьего порядка.4 $ для некоторой постоянной $ C $. Добавьте это частное решение к общему решению однородного уравнения, и вы получите общее решение вашего уравнения.
Создан 03 апр.
Роберт ИсраэльРоберт Исраэль408k2424 золотых знака
$ \ endgroup $ $ \ begingroup $Вы правы, что есть простой способ решить эту проблему.5 + C_1 $$ Я оставлю вас атаковать этого, так как это всего лишь ODE второго порядка. Дайте мне знать, если вам понадобится дополнительная помощь!
Создан 03 апр.
7,335 золотых знаков1919 серебряных знаков3939 бронзовых знаков
$ \ endgroup $ 0 Mathematics Stack Exchange лучше всего работает с включенным JavaScriptВаша конфиденциальность
Нажимая «Принять все файлы cookie», вы соглашаетесь с тем, что Stack Exchange может хранить файлы cookie на вашем устройстве и раскрывать информацию в соответствии с нашей Политикой в отношении файлов cookie.
Принимать все файлы cookie Настроить параметры
Исследование решения нелинейного обыкновенного дифференциального уравнения третьего порядка в комплексной области путем обобщения метода Прелля – Зингера
Метод решения семейства нелинейных обыкновенных комплексных дифференциальных уравнений третьего порядка (НЛОКДУ) – нелинейных ОДУ в комплексной плоскости – с помощью обобщающий Прель-Зингер. Обобщенный авторами подход представляет собой процедуру получения решения разновидности нелинейных ОДУ второго порядка в вещественной прямой. Некоторые теоретические работы были проиллюстрированы и применены к нескольким примерам. Кроме того, был введен расширенный метод генерации второго и третьего интегралов движения в комплексной области, который концептуально является аналогом движения в реальной прямой. Кроме того, процедуры упомянутого выше метода были проверены.
Обобщенный авторами подход представляет собой процедуру получения решения разновидности нелинейных ОДУ второго порядка в вещественной прямой. Некоторые теоретические работы были проиллюстрированы и применены к нескольким примерам. Кроме того, был введен расширенный метод генерации второго и третьего интегралов движения в комплексной области, который концептуально является аналогом движения в реальной прямой. Кроме того, процедуры упомянутого выше метода были проверены.
1. Введение
За последние пять десятилетий были изобретены замечательные методы идентификации нелинейных интегрируемых динамических систем в реальном масштабе времени.В частности, были разработаны или модифицированы различные методы для исследования инновационных интегрируемых случаев и изучения потенциальной динамики, которая может быть связана с конечномерными нелинейными динамическими системами, определяемыми действительными числами [1]. Наиболее широко математическими инструментами, которые используются для решения ОДУ, являются анализ Пенлеве [1, 2], прямой метод [3] анализ симметрии Ли [1, 4], теорема Нётер [1, 4], прямая линеаризация [5], λ -симметрии, присоединенные симметрии и метод последнего множителя Якоби [6, 7].
Тридцать лет назад, в сообществе ДУ, систем ДУ и интегрируемых динамических систем, Прелле и Зингер [8] разработали особенно мощный подход для решения своего рода нелинейных ОДУ первого порядка в реальной линии, и он получил решение, состоящее из элементарных функций на действительной прямой. В настоящей работе авторы делают шаг вперед, чтобы обобщить один конкретный метод, а именно метод Прелля – Зингера, и представить связанную процедуру на комплексной плоскости; авторы обобщили класс нелинейных ОДУ [9], в котором он имеет вещественный интервал определения.Затем они построили класс (NLOCDE (Нелинейные обыкновенные комплексные дифференциальные уравнения (NLOCDE, где общее решение упомянутого))) представляет собой алгебраическую комбинацию комплексных элементарных функций, аналитических в определенной области комплексной плоскости.
Центральная концепция схемы Прелля – Зингера состоит в том, что если реальная адресная система нелинейных ОДУ первого порядка имеет решение, построенное из реальных элементарных функций, то этот метод гарантирует, что это решение будет существовать. Ранее в 2001 г. Duarte et al. опубликовали статью [10], в которой они расширили метод, предложенный Преллем и Зингером в 1983 году [8], чтобы он мог использоваться для решения нелинейных ОДУ второго порядка. Мгновенная стратегия основана на предположении, что если комплексное элементарное решение существует для данных нелинейных OCDE второго порядка, то существует по крайней мере один элементарный первый интеграл в комплексной области, в котором все его производные являются комплексными рациональными функциями z , и.Duarte et al. впервые вывел первые интегралы для некоторых классов ОДУ.
Ранее в 2001 г. Duarte et al. опубликовали статью [10], в которой они расширили метод, предложенный Преллем и Зингером в 1983 году [8], чтобы он мог использоваться для решения нелинейных ОДУ второго порядка. Мгновенная стратегия основана на предположении, что если комплексное элементарное решение существует для данных нелинейных OCDE второго порядка, то существует по крайней мере один элементарный первый интеграл в комплексной области, в котором все его производные являются комплексными рациональными функциями z , и.Duarte et al. впервые вывел первые интегралы для некоторых классов ОДУ.
Недавно в литературе появилось обобщение теории, приведенной в [10], и решение класса уравнений нелинейного осциллятора [11]. Кроме того, были очень ранние вклады в тему, где решения ОДУ строятся как часть функций, а используемый метод, грубо говоря, немного похож на методы в литературе, как обогащение прикладной математики [12].В последней работе [13] авторы обобщили концепцию ОДУ и исследовали некоторые приложения в физике и технике на основе идей из [14]. В этой статье авторы расширили теорию Дуарте, которую он представил в [10], применили ее к нелинейным OCDE третьего порядка и создали соотношение, которое связывает комплексные интегралы движения (интегралы в комплексном плане), аналогичные комплексным интегрирующие факторы. Они также проиллюстрировали теорию примером. Кроме того, они показали, что можно генерировать требуемое количество сложных интегралов движения (интеграл движения в комплексной плоскости) аналога из первого комплексного интеграла движения.Структура статьи такова: в разделе 2 авторы развили теорию расширенного метода Прелля – Зингера, чтобы сделать его применимым к обычным нелинейным CDE третьего порядка. В разделах 1–4 приведены теоретические определения; в разделе 5 авторы рассмотрели пример и построили комплексные интегралы движения. В разделе 6 описывается процедура, с помощью которой можно генерировать второй и третий комплексные интегралы движения из первого интеграла для класса уравнений. В разделе 7 теория была проверена на реализациях некоторых рассмотренных примеров.
В этой статье авторы расширили теорию Дуарте, которую он представил в [10], применили ее к нелинейным OCDE третьего порядка и создали соотношение, которое связывает комплексные интегралы движения (интегралы в комплексном плане), аналогичные комплексным интегрирующие факторы. Они также проиллюстрировали теорию примером. Кроме того, они показали, что можно генерировать требуемое количество сложных интегралов движения (интеграл движения в комплексной плоскости) аналога из первого комплексного интеграла движения.Структура статьи такова: в разделе 2 авторы развили теорию расширенного метода Прелля – Зингера, чтобы сделать его применимым к обычным нелинейным CDE третьего порядка. В разделах 1–4 приведены теоретические определения; в разделе 5 авторы рассмотрели пример и построили комплексные интегралы движения. В разделе 6 описывается процедура, с помощью которой можно генерировать второй и третий комплексные интегралы движения из первого интеграла для класса уравнений. В разделе 7 теория была проверена на реализациях некоторых рассмотренных примеров.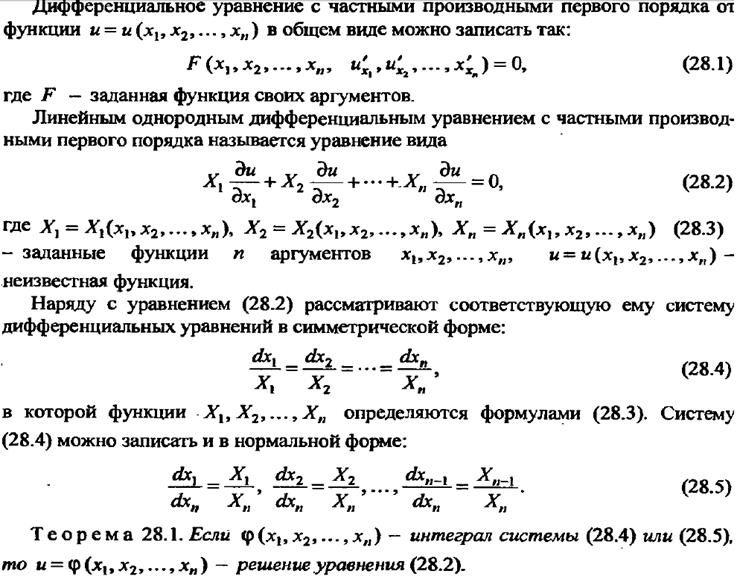 В разделе 8 решена гамильтонова система дисперсионных волн на воде. Наконец, вывод был сделан в разделе 9.
В разделе 8 решена гамильтонова система дисперсионных волн на воде. Наконец, вывод был сделан в разделе 9.
2. Предварительные сведения
В этом разделе показаны основные определения дифференциальных уравнений в комплексной области [15–19].
Определение 1. Комплексное дифференциальное уравнение – это уравнение, которое содержит производные комплексной аналитической функции одной или нескольких независимых переменных: где – комплексные зависимые переменные.Общая форма сложных дифференциальных уравнений – и она будет называться CDE, как ее сокращение, и является решением для CDE.
Определение 2. Порядок CDE (CDE означает комплексное дифференциальное уравнение) является наивысшей производной в этом CDE.
Определение 3. Степень CDE – это степень высшей производной в этом CDE.
Замечание 1. Комплексное дифференциальное уравнение бывает двух типов: обыкновенные комплексные дифференциальные уравнения и дифференциальные уравнения в частных производных. (1) Обычные комплексные дифференциальные уравнения (OCDE) имеют одну зависимость и одну независимую комплексную переменную (2) Частные комплексные дифференциальные уравнения (PCDE) имеют более одной независимой комплексной переменной
(1) Обычные комплексные дифференциальные уравнения (OCDE) имеют одну зависимость и одну независимую комплексную переменную (2) Частные комплексные дифференциальные уравнения (PCDE) имеют более одной независимой комплексной переменной
Замечание 2. В этой работе авторы концентрируют внимание на изучение обыкновенных комплексных дифференциальных уравнений.
3. Обыкновенные комплексные дифференциальные уравнения
Общая форма обыкновенных комплексных дифференциальных уравнений имеет вид [20–22]
Определение 4. Частное решение – это общее решение с заданным значением константы C .
Определение 5. Рассмотрим OCDE, которые имеют общий вид [23] Уравнение (4) называется линейным обыкновенным комплексным дифференциальным уравнением, когда (4) линейно по и его производным.
Определение 6. Обыкновенное комплексное дифференциальное уравнение называется нелинейным комплексным дифференциальным уравнением, если оно является нелинейным [24].
4. Анализ метода Прелля – Зингера для OCDE третьего порядка
Рассмотрим вид нелинейных OCDE третьего порядка стандартной формы [25], где G и H – многочлены с постоянными коэффициентами в комплексе поле.
Предположим, что OCDE (5) уступает первому интегралу, когда C является комплексной константой в решениях семейства. Следовательно, полное дифференцирование равно
Перефразируя (5) в схеме и добавляя нулевые выражения к уравнению (7), мы получаем
Следовательно, на решениях уравнения (6) и (9) должны быть эквивалентными. Умножая уравнение (9) на комплексный множитель функции интегрирования, для CDE (5) получаем где.
Сравнивая уравнения (6) с (10), мы получаем уравнения
Условия совместимости,, и, между уравнением (11) снабжают нас следующим: где D – полный дифференциальный комплексный оператор:
Следует отметить, что уравнения (12) – (17) образуют переопределенную систему для нераскрытых комплексных функций: S , F и R .
Решив их путем подстановки в уравнения (12) и (13), на выходе будет система CDE неизвестных комплексных функций S и F . Решая уравнения, можно получить выражения для нулевых форм S и F . После определения F уравнение (14) превращается в определяющее уравнение для функции R . Путем проработки последний может занять явную конструкцию за R .На мгновение комплексные функции и S должны удовлетворять дополнительным ограничениям (15) – (17).
Тем не менее, как только совместное решение удовлетворяет каждому уравнению, которое было неожиданно получено, комплексные функции и S фиксируют первый интеграл соотношением, где
Уравнение (19) может быть получено напрямую путем интегрирования уравнения ( 11). Незамедлительно подставьте выражения ϕ, R , F и S в уравнение (19) и получите интегралы, когда можно будет получить соответствующие интегралы движения.
5. Реализация
В этом разделе мы проиллюстрируем теорию, которая была разработана и показана в разделе 4 [26].
5.1. Пример 1
5.1.1. A: Определение коэффициентов интегрирования и нулевых членов
Рассмотрим следующее уравнение:
Подставляя в (12) – (14), получаем
Как упоминалось в разделе 4, сначала мы решили систему (11) и получили явный формы для функций S и F .Заметим, что для этого конкретного примера это простое решение уравнения (22). Итак, мы рассматриваем последствия этого решения.
Теперь подставляя в уравнение (23), мы получаем дифференциальное уравнение первого порядка для F , а именно
. Чтобы найти решение уравнения (25), можно было бы приблизиться к F шаблона, где a , b , c , d , e и f являются произвольными функциями от z , и.
Подставив уравнение (26) в (25) и установив коэффициенты с одинаковой степенью обращения в нуль, мы получаем семейство PCDEe (PCDE означает комплексные дифференциальные уравнения с частными производными) по отношению к переменным a , b , c , d , e и.
Решая, можно быстро получить
Заменяя сложные соотношения и на (24) и вычисляя последнее, можно получить точный образец комплексной факторной функции R .
Сначала рассмотрим, и соответствующее уравнение для R становится
Чтобы снова решить (28), нужно составить анзац. Мы принимаем следующую форму для R , то есть где A , B , C , D , E и F являются произвольными функциями от z , и.
Теперь подставив уравнение (29) в (28) и приравняв коэффициенты дифференциальной степени к нулю и решив полученные уравнения, мы получим следующие выражения для R , а именно:
Аналогичным образом, заменив член в ( 28) и решая полученное уравнение с помощью анзаца того же типа (29), получаем
. Для компиляции мы достигаем следующего набора решений (с помощью анзаца (27) и (29) для уравнений (22) – (24) )):
На предыдущем этапе мы оставили нерешенными еще три уравнения, то есть
. Однако можно быстро проверить, что решение (32) также удовлетворяет дополнительным ограничениям (33) – (35).В результате (32) образует согласованные решения для систем (12) – (17) с данными в (21). Наконец, отметим, что выше мы рассмотрели только тривиальное решение уравнения (25) и вывели соответствующие формы F и R . Однако при выборе системы (22) и (23) становятся связанными уравнениями с неизвестными F и S . Чтобы решить эту систему, как мы делали ранее, сделаем анзац: в котором коэффициенты являются произвольными функциями от.Подставляя уравнения (36) и (37) в уравнения (22) и (23) и решая полученные уравнения, мы приходим к тому, что, в свою очередь, вынуждает R оставаться в виде
Однако можно быстро проверить, что решение (32) также удовлетворяет дополнительным ограничениям (33) – (35).В результате (32) образует согласованные решения для систем (12) – (17) с данными в (21). Наконец, отметим, что выше мы рассмотрели только тривиальное решение уравнения (25) и вывели соответствующие формы F и R . Однако при выборе системы (22) и (23) становятся связанными уравнениями с неизвестными F и S . Чтобы решить эту систему, как мы делали ранее, сделаем анзац: в котором коэффициенты являются произвольными функциями от.Подставляя уравнения (36) и (37) в уравнения (22) и (23) и решая полученные уравнения, мы приходим к тому, что, в свою очередь, вынуждает R оставаться в виде
Выражения (38) и (39) удовлетворяют дополнительным ограничениям (33) – (35), поэтому функции также образуют согласованное решение для уравнений (12) – (17) с данными в (21).
5.1.2. B: Интегралы движения
Определенные функции,, мы можем перейти к определению связанных интегралов движения, и, подставляя выражения,, в (19) отдельно и вычисляя интегралы, мы получаем соответственно. Легко проверить, что,, являются константами на комплексных решениях, то есть,,. Из интегралов,, и, мы можем вывести общее комплексное решение уравнения (21). Например, решая уравнение (41) для и подставляя в уравнения (42) и (43), мы получаем после алгебраического объединения этих уравнений, чтобы исключить, и мы получаем функциональную связь между и z как
Легко проверить, что,, являются константами на комплексных решениях, то есть,,. Из интегралов,, и, мы можем вывести общее комплексное решение уравнения (21). Например, решая уравнение (41) для и подставляя в уравнения (42) и (43), мы получаем после алгебраического объединения этих уравнений, чтобы исключить, и мы получаем функциональную связь между и z как
Мы упоминаем это выражение (45 ) был получен с другой точки зрения с использованием обобщенных множителей в [27].
6. Метод генерации сложных интегралов аналога движения
В разделе 5 авторы вывели интегралы движения, построив достаточное количество интегрирующих множителей. Красиво, можно также сгенерировать необходимое количество интегралов движения из самого первого интеграла. Например, для системы третьего порядка, представленной уравнением (21), можно создать и из себя. В следующей работе мы собираемся проиллюстрировать наши идеи.
Предположим, что существует первый интеграл для уравнения третьего порядка (5) вида
Предположим, что есть два фактора к функции, в которых она может быть представлена в структуре двух различных умноженных комплексных функций, таких как что одна включает в себя совершенную дифференцируемую функцию, а другая функция, то есть построение комплексной функции как новой зависимой переменной и интеграла от времени как новой независимой переменной, а именно
Можно представить (47) в виде
Интегрируя (49), получаем где – постоянная интегрирования. Другими словами,
Другими словами,
Переписав значения n и m относительно старых переменных и заменив их явной формой, можно получить точную форму для. Интересно, что можно представить первый интеграл в форме (47) более чем одним способом, например,
7. Приложения
Чтобы проиллюстрировать вышеупомянутые идеи, мы рассмотрим тот же пример (см. Уравнение (21)), обсужденный в разделе 5. В частности, мы рассматриваем один из комплексных интегралов и генерируем два других с помощью нашей процедуры.
Давайте сначала рассмотрим (41), то есть сгенерируем и из (53). Переписывая (53) в форму (47), получаем так, что
Интегрируя (54), получаем
Переписывая n и m в терминах старых переменных, выражая выражение (55) и заменяя выражением (53) , мы приходим к тому, что в точности аналогично уравнению, которое мы вывели (см. уравнение (42)) ранее с помощью метода Прелля – Зингера.
Теперь для генерации из перепишем функции в виде (47), но с другими последними, а именно так, чтобы
Интегрируя (59), получаем
Подставляя (59) и (53) в (60) , получаем, что в точности согласуется с (43). Точно так же мы можем происходить и от, и от. Поскольку схема такая же, как и приведенная выше, мы предоставляем только основные шаги.
Точно так же мы можем происходить и от, и от. Поскольку схема такая же, как и приведенная выше, мы предоставляем только основные шаги.
Рассмотрим так: и порождаем и из первого. Перепишем вышеприведенное в виде
Более того, повторяя описанные выше шаги, получаем первый интеграл (41). Напротив, выражение в форме приводит нас к третьему интегралу (43).
8. Реализация, возникающая в физике
Физическая модель описания дисперсионных волн на воде как системы OCDE третьего порядка является одной из наиболее важных реализаций CDE, и метод Прелля – Зингера играет важную роль в их поиске. интегрирующий фактор и, в конечном итоге, решение таких систем.Физическая модель, наконец, имеет однородную нелинейную систему [28]: для некоторых H и B является гамильтоновым оператором комплексных УЧП и
. Например, система (66) удовлетворяет первому интегралу, который имеет вид где он постоянно на решениях. Таким образом, общее дифференцирование будет
. Затем мы можем написать
Затем мы можем написать
. Добавив нулевые члены в (69),
Теперь, умножив (70) на коэффициент интегрирования и (71) на коэффициент интегрирования, где и, мы получаем результат как где,, и.
Когда мы сравниваем вышеупомянутые уравнения с уравнением (72), мы получаем
Используя условия, мы получаем определяющие уравнения:
Когда части решений, и найдены, интеграл может быть построен с помощью подставив все выражения в (73) и найдите интегрирование для результата, то есть где
Для определения интегрирующих факторов и мы представим определяющие уравнения (74) – (79) в виде двух уравнений: где
Определение уравнений (97) и (98) представляет собой систему линейных PDE в и.Подставляя слагаемые и и их производные в (97) и (98) и решая их, мы можем получить выражения для интегрирующего множителя и. После нахождения R s функции ( S , U , M и N ) могут быть зафиксированы с помощью соотношений (76) – (79). После того, как кто-то найдет, S , U , M и N , он должен убедиться, что они удовлетворяют условиям (80) – (94). Таким образом, набор, удовлетворяющий уравнениям (74) – (94), сформирует искомое решение и интеграл, который имеет вид (95).
После того, как кто-то найдет, S , U , M и N , он должен убедиться, что они удовлетворяют условиям (80) – (94). Таким образом, набор, удовлетворяющий уравнениям (74) – (94), сформирует искомое решение и интеграл, который имеет вид (95).
9. Заключение
В данной работе авторы исследовали новый метод решения OCDE третьего порядка с помощью модифицированной техники Прелля – Зингера. Этот процесс был непростым для [10], но имел некоторые новые теоретические аспекты, которые имели ряд преимуществ. Исследование проиллюстрировало теорию некоторыми реализациями. Он также представил новый способ генерации второго и третьего комплексных интегралов аналога движения из первого комплексного интеграла и продемонстрировал идею на том же примере, который рассматривался ранее.Авторы решили возникающую в физике систему НЛОКДУ третьего порядка, а именно в диспергирующих водных волнах. Преимущество этой работы состоит в том, чтобы найти рациональное решение обыкновенного нелинейного дифференциального уравнения в комплексной области и применить теории решения ОДУ к комплексной плоскости. В качестве начального шага расширенная версия Prelle – Singer была расширена, чтобы ее можно было применить к моделям в физике и технике, которые подразумевают ДУ в сложной области как важную часть. В будущей работе будет проложен путь к обобщению и исследованию других методов в сложной области.
В качестве начального шага расширенная версия Prelle – Singer была расширена, чтобы ее можно было применить к моделям в физике и технике, которые подразумевают ДУ в сложной области как важную часть. В будущей работе будет проложен путь к обобщению и исследованию других методов в сложной области.
Доступность данных
Никакие данные не использовались для поддержки этого исследования.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Новый алгоритм численного решения нелинейных дифференциальных уравнений третьего порядка с использованием метода коллокации Якоби-Гаусса
Новый алгоритм решения общего нелинейного дифференциала третьего порядка
уравнение построено с помощью спектрального метода коллокационной коллокации со смещением Якоби-Гаусса.Сдвинутый
Точки Якоби-Гаусса используются в качестве узлов коллокации. Числовые примеры включены для демонстрации
валидность и применимость предложенного алгоритма, и некоторые сравнения сделаны с
существующие результаты. Метод прост в применении и дает очень точные результаты.
Метод прост в применении и дает очень точные результаты.
1. Введение
В течение последних трех десятилетий наблюдается значительный рост интереса к задачам, связанным с системами линейных, нелинейных и алгебраических обыкновенных дифференциальных уравнений с расщепленными начальными или граничными условиями.На протяжении всей инженерной и прикладной науки мы сталкиваемся с нелинейными или алгебраическими начальными (двухточечными краевыми) задачами, которые не могут быть решены аналитическими методами. С этим интересом к поиску решений конкретных нелинейных начальных (двухточечных краевых) задач, возникла растущая потребность в методах, способных отображать соответствующие профили. Несмотря на то, что был достигнут значительный прогресс в разработке новых и эффективных процедур, особенно в областях жидкостной и небесной механики, а также химической инженерии и управления, многое еще предстоит сделать.
В задаче начального значения мы должны приблизительно определить в некотором интервале 𝑡0≤𝑡≤𝑇, что решение 𝑢 (𝑡) дифференциального уравнения третьего порядка
𝜕3𝑡𝑢 (𝑡) = 𝑓𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡, 𝑢 (𝑡) (1. 1)
который задал начальные значения
𝑢𝑡0 = 𝑑0, 𝜕𝑡𝑢𝑡0 = 𝑑1, 𝜕2𝑡𝑢𝑡0 = 𝑑2, (1.2)
в начальной точке 𝑡 = 𝑡0. Будем предполагать существование и единственность такой задачи 𝑢 (𝑡) в этом интервале. Фактически, проблема существования и единственности решений для задач начального значения была тщательно исследована, и был опубликован подробный анализ.Наиболее приближенные методы, используемые в настоящее время, дают приближения 𝑢1,…, 𝑢𝑘,… к значениям 𝑢 (𝑡1),…, 𝑢 (𝑡𝑘),… точного решения в ряде дискретных точек 𝑡1,…, 𝑡𝑘,…. Выбор метода из множества доступных приближенных методов и весь порядок расчета в значительной степени определяется количеством шагов, то есть количеством точек 𝑡𝑘 и требуемой точностью. В задачах начального значения выполняются условия, особенно неблагоприятные для точности; Это не только длительный расчет, в котором неточности в начале расчета влияют на все последующие результаты, но также неточности в отдельных лицах 𝑢1, 𝑢2,… вызывают дополнительное увеличение ошибки.Вышеупомянутые моменты мотивируют наш интерес к спектральным методам.
1)
который задал начальные значения
𝑢𝑡0 = 𝑑0, 𝜕𝑡𝑢𝑡0 = 𝑑1, 𝜕2𝑡𝑢𝑡0 = 𝑑2, (1.2)
в начальной точке 𝑡 = 𝑡0. Будем предполагать существование и единственность такой задачи 𝑢 (𝑡) в этом интервале. Фактически, проблема существования и единственности решений для задач начального значения была тщательно исследована, и был опубликован подробный анализ.Наиболее приближенные методы, используемые в настоящее время, дают приближения 𝑢1,…, 𝑢𝑘,… к значениям 𝑢 (𝑡1),…, 𝑢 (𝑡𝑘),… точного решения в ряде дискретных точек 𝑡1,…, 𝑡𝑘,…. Выбор метода из множества доступных приближенных методов и весь порядок расчета в значительной степени определяется количеством шагов, то есть количеством точек 𝑡𝑘 и требуемой точностью. В задачах начального значения выполняются условия, особенно неблагоприятные для точности; Это не только длительный расчет, в котором неточности в начале расчета влияют на все последующие результаты, но также неточности в отдельных лицах 𝑢1, 𝑢2,… вызывают дополнительное увеличение ошибки.Вышеупомянутые моменты мотивируют наш интерес к спектральным методам.
Спектральные методы (см., Например, [1–3]) – один из основных методов дискретизации численных решений дифференциальных уравнений. Основное преимущество этих методов заключается в их точности для заданного числа неизвестных. Для гладких задач в простой геометрии они предлагают экспоненциальную скорость сходимости / спектральную точность. Напротив, методы конечных разностей и конечных элементов дают только алгебраические скорости сходимости.Три наиболее широко используемых спектральных версии – это методы Галеркина, коллокации и тау. Метод коллокации [1, 4, 5] становится все более популярным для решения дифференциальных уравнений. Кроме того, они очень полезны для получения высокоточных решений нелинейных дифференциальных уравнений.
Использование общих многочленов Якоби имеет то преимущество, что позволяет получать решения дифференциальных уравнений в терминах параметров Якоби 𝛼 и 𝛽 (см., Например, [6–10]). В данной статье мы намерены расширить применение полиномов Якоби от метода Галеркина для решения двухточечных линейных задач (см. [8, 9, 11]) до метода коллокаций для решения нелинейных задач с начальным значением.
[8, 9, 11]) до метода коллокаций для решения нелинейных задач с начальным значением.
В частности, дифференциальные уравнения третьего порядка возникают во многих важных физических задачах, таких как отклонение изогнутой балки с постоянным или изменяющимся поперечным сечением, трехслойная балка, движение ракеты, течение тонкой пленки. , электромагнитные волны или гравитационные потоки [12–14]. Таким образом, дифференциальные уравнения третьего порядка привлекают значительное внимание за последние три десятилетия, и в литературе появилось так много теоретических и численных исследований, посвященных таким уравнениям (см. [15–18] и ссылки в них).
Наиболее распространенный подход к решению обыкновенных дифференциальных уравнений третьего порядка (ОДУ) – это сведение задачи к системе дифференциальных уравнений первого порядка с последующим решением системы с использованием одного из доступных методов, который, в частности, был проверен. в литературе см. [19–21]. Однако, как упоминалось ранее, некоторые авторы отметили, что этот подход тратит много компьютерного времени и человеческих усилий (см. [22–24]).
[22–24]).
Приближенные решения общих ОДУ третьего порядка давались P-стабильным линейным многоступенчатым методом [25] и классом гибридного метода коллокации [26].Недавно Mehrkanoon в [22] предложил прямой трехточечный неявный блочный многошаговый метод для прямого решения общей проблемы начального значения третьего порядка с использованием переменного размера шага, и этот метод был основан на паре явных и неявных методов Адамса-Башфорта. – и формулы типа Адамса-Моултона. Недавно Guo и Wang [27] и Guo et al. [28] предложили два новых метода коллокации для начальных задач ОДУ первого порядка со спектральной точностью. Однако до сих пор нет работ, касающихся методов коллокации, сохраняющих спектральную точность, для задач начального значения ОДУ третьего порядка, поскольку нелегко разработать надлежащие алгоритмы и точно проанализировать их численные ошибки.
Основная цель данной статьи – разработать подходящий способ получения приближенных решений нелинейных дифференциальных уравнений третьего порядка на интервале (0, 𝑇) с использованием разложения по усеченным полиномам Якоби 𝑢𝑁∑ (𝑡) = 𝑁𝑗 = 0𝑎𝑗𝑃𝑗 (𝛼 , 𝛽) (𝑡), где 𝑁 – количество оставшихся мод. Нелинейное ОДУ совмещено только в (− 2) точках, которые являются (𝑁 − 2) узлами смещенной интерполяции Якоби-Гаусса на (0,). Эти уравнения вместе с тремя начальными условиями порождают (𝑁 + 1) нелинейные алгебраические уравнения, которые можно решить с помощью итерационного метода Ньютона.Наконец, точность предложенного алгоритма демонстрируется на решении некоторых тестовых задач. Численные результаты представлены, чтобы проиллюстрировать обычное хорошо известное поведение экспоненциальной сходимости спектральных приближений.
Нелинейное ОДУ совмещено только в (− 2) точках, которые являются (𝑁 − 2) узлами смещенной интерполяции Якоби-Гаусса на (0,). Эти уравнения вместе с тремя начальными условиями порождают (𝑁 + 1) нелинейные алгебраические уравнения, которые можно решить с помощью итерационного метода Ньютона.Наконец, точность предложенного алгоритма демонстрируется на решении некоторых тестовых задач. Численные результаты представлены, чтобы проиллюстрировать обычное хорошо известное поведение экспоненциальной сходимости спектральных приближений.
Этот документ устроен следующим образом. В разделе 2 мы даем обзор сдвинутых полиномов Якоби и их соответствующих свойств, необходимых в дальнейшем, а в разделе 3 описывается способ построения техники коллокации с использованием сдвинутых полиномов Якоби для численного решения нелинейных дифференциальных уравнений третьего порядка.В разделе 4 предложенный алгоритм применяется к некоторым типам нелинейных дифференциальных уравнений третьего порядка, и проводятся некоторые сравнения с существующими аналитическими решениями, о которых сообщалось в других опубликованных работах в литературе. Также в разделе 5 дается заключение.
Также в разделе 5 дается заключение.
2. Предварительные сведения
Классические многочлены Якоби, связанные с действительными параметрами (𝛼> −1, 𝛽> −1; см. [29]), представляют собой последовательность многочленов 𝑃𝑛 ( 𝛼, 𝛽) (𝑛 = 0,1,2,…), каждая соответствующей степени, удовлетворяющая соотношению ортогональности
1−1 (1 − 𝑡) 𝛼 (1 + 𝑡) 𝛽𝑃𝑚 (𝛼, 𝛽) (𝑥) 𝑃𝑛 (𝛼, 𝛽) ℎ (𝑡) 𝑑𝑡 = 0, 𝑚 ≠ 𝑛, 𝑛 (𝛼, 𝛽), 𝑚 = 𝑛, (2.1)
куда
ℎ𝑛 (𝛼, 𝛽) = 2𝜆Γ (𝑛 + 𝛼 + 1) Γ (𝑛 + 𝛽 + 1) 𝑛! (2𝑛 + 𝜆) Γ (𝑛 + 𝜆), 𝜆 = 𝛼 + 𝛽 + 1. (2.2)
Следующие два соотношения будут иметь принципиальное значение в дальнейшем.
𝑃𝑘 (𝛼, 𝛽) (- 𝑡) = (- 1) 𝑘𝑃𝑘 (𝛼, 𝛽) 𝐷 (𝑡), (2.3) 𝑚𝑃𝑘 (𝛼, 𝛽) Γ (𝑡) = (𝑚 + 𝑘 + 𝛼 + 𝛽 + 1 ) 2𝑚𝑃Γ (𝑘 + 𝛼 + 𝛽 + 1) (𝛼 + 𝑚, 𝛽 + 𝑚) 𝑘 − 𝑚 (𝑡). (2.4)
Пусть 𝑤 (𝛼, 𝛽) (𝑡) = (1 − 𝑡) 𝛼 (1 + 𝑡) 𝛽 – весовая функция многочленов Якоби на [−1,1], тогда определим весовое пространство 𝐿2𝑤 (𝛼, 𝛽 ) (- 1,1), как обычно, со следующим внутренним произведением и нормой как
(𝑢, 𝑣) 𝑤 (𝛼, 𝛽) = 1−1𝑢 (𝑡) 𝑣 (𝑡) 𝑤 (𝛼, 𝛽) (𝑡) 𝑑𝑡, ‖𝑣‖𝑤 (𝛼, 𝛽) = (𝑣, 𝑣) 𝑤1 / 2 (𝛼, 𝛽). (2.5)
Хорошо известно, что множество многочленов Якоби образует полную 2𝑤𝛼, 𝛽 (−1,1) -ортогональную систему и
‖‖𝑃𝑘 (𝛼, 𝛽) ‖‖2𝑤 (𝛼, 𝛽) = ℎ𝑘 (𝛼, 𝛽), (2.6)
где ℎ𝑘 (𝛼, 𝛽) определено в (2.2).
(2.5)
Хорошо известно, что множество многочленов Якоби образует полную 2𝑤𝛼, 𝛽 (−1,1) -ортогональную систему и
‖‖𝑃𝑘 (𝛼, 𝛽) ‖‖2𝑤 (𝛼, 𝛽) = ℎ𝑘 (𝛼, 𝛽), (2.6)
где ℎ𝑘 (𝛼, 𝛽) определено в (2.2).
Пусть 𝑇> 0, тогда сдвинутый многочлен Якоби степени 𝑘 определяется формулой 𝑃 (𝛼, 𝛽) 𝑇, 𝑘 (𝑡) = 𝑃𝑘 (𝛼, 𝛽) (2𝑡 / 𝑇 − 1), и в силу ( 2.3) и (2.4) имеем 𝑃 (𝛼, 𝛽) 𝑇, 𝑘 (0) = (- 1) 𝑘Γ (𝑘 + 𝛽 + 1), 𝐷𝑘! Γ (𝛽 + 1) 𝑞𝑃 (𝛼, 𝛽) 𝑇, 𝑘 (0) = (- 1 ) 𝑘 − 𝑞Γ (𝑘 + 𝛽 + 1) (𝑘 + 𝛼 + 𝛽 + 1) 𝑞𝑇𝑞. (𝑘 − 𝑞)! Γ (𝑞 + 𝛽 + 1) (2.7) Далее, пусть 𝑤𝑇 (𝛼, 𝛽) (𝑡) = (𝑇 − 𝑡) 𝛼𝑡𝛽, тогда мы определяем весовое пространство 𝐿2𝑤𝑇 (𝛼, 𝛽) (0,) со следующим внутренним произведением и нормой как (𝑢, 𝑣) 𝑤𝑇 (𝛼, 𝛽) = 𝑇0𝑢 (𝑡) 𝑣 (𝑡) 𝑤𝑇 (𝛼, 𝛽) (𝑡) 𝑑𝑡, ‖𝑣‖𝑤𝑇 (𝛼, 𝛽) = (𝑣, 𝑣) 𝑤1 / 2𝑇 (𝛼, 𝛽).(2.8)
Легко показать, что множество сдвинутых многочленов Якоби образует полную 𝐿2𝑤𝑇 (𝛼, 𝛽) (0, 𝑇) -ортогональную систему. Более того, в силу (2.6) нетрудно видеть, что
‖‖𝑃 (𝛼, 𝛽) 𝑇, 𝑘‖‖2𝑤𝑇 (𝛼, 𝛽) = 𝑇2𝛼 + 𝛽 + 1ℎ𝑘 (𝛼, 𝛽) = ℎ (𝛼, 𝛽) 𝑇, 𝑘. (2.9)
Стоит отметить, что при = 𝛽 восстанавливаются сдвинутые ультрасферические полиномы (симметричные сдвинутые полиномы Якоби), а при = 𝛽 = ∓1 / 2, 𝛼 = 𝛽 = 0 – сдвинутые Чебышева первого и второго рода и сдвинутые Полиномы Лежандра соответственно; для несимметричных сдвинутых многочленов Якоби также восстанавливаются два важных частных случая 𝛼 = −𝛽 = ∓1 / 2 (сдвинутые многочлены Чебышева третьего и четвертого рода).
Обозначим через 𝑡 (𝛼, 𝛽) 𝑁, 𝑗, 0≤𝑗≤𝑁, узлы стандартной интерполяции Якоби-Гаусса на интервале (−1,1). Соответствующие им числа Кристоффеля: 𝜛 (𝛼, 𝛽) 𝑁, 𝑗, 0≤𝑗≤𝑁. Узлами сдвинутой интерполяции Якоби-Гаусса на интервале (0, 𝑇) являются нули (𝛼, 𝛽) 𝑇, 𝑁 + 1 (𝑡), которые мы обозначим через 𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗 , 0≤𝑗≤𝑁. Ясно, что 𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗 = (𝑇 / 2) (𝑡 (𝛼, 𝛽) 𝑁, 𝑗 + 1), и соответствующие им числа Кристоффеля равны 𝜛 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗 = (𝑇 / 2) 𝛼 + 𝛽 + 1𝜛 (𝛼, 𝛽) 𝑁, 𝑗, 0≤𝑗≤𝑁. Пусть 𝑆𝑁 (0, 𝑇) – множество многочленов степени не выше 𝑁, благодаря свойству стандартной квадратуры Якоби-Гаусса, тогда для любого 𝜙∈𝑆2𝑁 + 1 (0, 𝑇) 0 ( 𝑇 − 𝑡) 𝛼𝑡𝛽𝑇𝜙 (𝑡) 𝑑𝑡 = 2𝛼 + 𝛽 + 11−1 (1 − 𝑡) 𝛼 (1 + 𝑡) 𝛽𝜙𝑇2 = 𝑇 (𝑡 + 1) 𝑑𝑡2𝑁𝛼 + 𝛽 + 1𝑗 = 0𝜛 (𝛼, 𝛽) 𝑁, 𝑗𝜙𝑇2𝑡 (𝛼, 𝛽) 𝑁, 𝑗 = + 1𝑁𝑗 = 0𝜛 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗𝜙𝑡 ( 𝛼, 𝛽) 𝑇, 𝑁, 𝑗.(2.10)
3. Метод коллокации Якоби-Гаусса для нелинейных ОДУ третьего порядка
Нелинейные ОДУ третьего порядка
𝐹𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) = 0, (3.1)
часто можно решить для члена 3𝑡𝑢 (𝑡), чтобы определить, что
𝜕3𝑡𝑢𝑢 (𝑡) = 𝑓 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡. 𝑢 (𝑡) (3.2)
По теореме о неявной функции, если
𝜕𝐹𝜕3𝑡𝑢 (𝑡) 𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) ≠ 0, (3.3)
то решения (3.2) – единственно возможные решения. Однако в этих точках, где
𝜕𝐹𝜕3𝑡𝑢 (𝑡) 𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) = 0, (3.4)
существует возможность особых решений.
𝑢 (𝑡) (3.2)
По теореме о неявной функции, если
𝜕𝐹𝜕3𝑡𝑢 (𝑡) 𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) ≠ 0, (3.3)
то решения (3.2) – единственно возможные решения. Однако в этих точках, где
𝜕𝐹𝜕3𝑡𝑢 (𝑡) 𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) = 0, (3.4)
существует возможность особых решений.
Если член 𝜕3𝑡𝑢 (𝑡) исключить из двух уравнений
𝐹𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) = 0, 𝜕𝐹𝜕3𝑡𝑢 (𝑡) 𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 ( 𝑡), 𝜕2𝑡𝑢 (𝑡), 𝜕3𝑡𝑢 (𝑡) = 0, (3.5)
тогда уравнение вида
𝐻𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡) = 0 (3.6)
полученные результаты. Его решение (я) описывают особые локусы. В этом разделе нас интересует использование метода коллокации со сдвигом Якоби-Гаусса для численного решения следующей модельной задачи
𝜕3𝑡𝑢 (𝑡) = 𝑓𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡), 0 <𝑡≤𝑇, (3.7)
при начальных условиях Коши
𝑢 (0) = 𝑑0, 𝜕𝑡𝑢 (0) = 𝑑1, 𝜕2𝑡𝑢 (0) = 𝑑2, (3.8)
где значения 𝑑0, 𝑑1 и 𝑑2 описывают начальное состояние (𝑡), а 𝑓 (𝑡, 𝑢 (𝑡), 𝜕𝑡𝑢 (𝑡), 𝜕2𝑡𝑢 (𝑡)) является нелинейной функцией от 𝑡, 𝑢, 𝜕𝑡𝑢 и 2𝑡𝑢, которые могут быть сингулярными при = 0.
Давайте сначала введем некоторые основные обозначения, которые будут использоваться в дальнейшем. Мы устанавливаем 𝑆𝑁𝑃 (0, 𝑇) = span (𝛼, 𝛽) 𝑇, 0 (𝑡), 𝑃 (𝛼, 𝛽) 𝑇, 1 (𝑡),…, 𝑃 (𝛼, 𝛽) 𝑇, 𝑁 (𝑡) , (3.9) и мы определяем дискретный внутренний продукт и норму как (𝑢, 𝑣) 𝑤𝑇 (𝛼, 𝛽), 𝑁 = 𝑁𝑗 = 0𝑢𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗𝑣𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗𝜛 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗, ‖𝑢‖𝑤𝑇 (𝛼, 𝛽), 𝑁 = (𝑢, 𝑢) 𝑤𝑇 (𝛼, 𝛽), 𝑁, (3.10) где 𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗 и 𝜛 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗 – узлы и соответствующие веса сдвинутой квадратурной формулы Якоби-Гаусса на интервале (0, 𝑇) соответственно .
Очевидно, (𝑢, 𝑣) 𝑤𝑇 (𝛼, 𝛽), 𝑁 = (𝑢, 𝑣) 𝑤𝑇 (𝛼, 𝛽), ∀𝑢𝑣∈𝑆2𝑁 − 1. (3.11) Таким образом, для любого 𝑢∈𝑆𝑁 (0, 𝑇) две нормы ‖𝑢‖𝑤𝑇 (𝛼, 𝛽), 𝑁 и ‖𝑢‖𝑤𝑇 (𝛼, 𝛽) совпадают.
Связанный с этим квадратурным правилом, мы обозначаем через 𝐼𝑃𝑇 (𝛼, 𝛽) 𝑁 смещенную интерполяцию Якоби-Гаусса, то есть 𝐼𝑃𝑇 (𝛼, 𝛽) 𝑁𝑢𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗𝑡 = 𝑢 (𝛼, 𝛽) 𝑇, 𝑁, 𝑗, 0≤𝑗≤𝑁.(3.12)
Метод смещенной коллокации Якоби-Гаусса для решения (3.7) и (3.8) заключается в поиске 𝑢𝑁 (𝑡) ∈𝑆𝑁 (0, 𝑇) такое, что
𝜕3𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘𝑡 = 𝑓 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 𝜕𝑡𝑢𝑁𝑡 ( 𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 𝜕2𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘𝑢, 𝑘 = 0,1,…, 𝑁 − 3, 𝑁 (𝑖) (0) = 𝑑𝑖, 𝑖 = 0,1,2. (3.13)
Теперь выведем алгоритм решения (3.7) и (3.8). Для этого пусть
𝑢𝑁 (𝑡) = 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗𝑎 (𝑡), 𝐚 = 0, 𝑎1,…, 𝑎𝑁𝑇, (3.14)
то с помощью (3.14) и, соответственно, по (3.7) принимает вид
𝑁𝑗 = 0𝑎𝑗𝐷3𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡) = 𝑓𝑡, 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡), 𝑁𝑗 = 0𝑎𝑗𝐷𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡), 𝑁𝑗 = 0𝑎𝑗𝐷2𝑃 (𝛼, 𝛽) 𝑇, 𝑗. (𝑡) (3.15)
и в силу (2.4) выводим, что
1𝑇3𝑁𝑗 = 3𝑎𝑗 (𝑗 + 𝜆) 3𝑃 (𝛼 + 3, 𝛽 + 3) 𝑇, 𝑗 − 3 (𝑡) = 𝑓𝑡, 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗1 (𝑡), 𝑇𝑁 𝑗 = 1𝑎𝑗 (𝑗 + 𝜆) 𝑃 (𝛼 + 1, 𝛽 + 1) 𝑇, 𝑗 − 11 (𝑡), 𝑇2𝑁𝑗 = 2𝑎𝑗 (𝑗 + 𝜆) 2𝑃 (𝛼 + 2, 𝛽 + 2) 𝑇, 𝑗 − 2. (𝑡) (3.16)
Подстановка (3.14) в (3.8) дает
𝑁𝑗 = 0𝑎𝑗𝐷𝑖𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (0) = 𝑑𝑖, 𝑖 = 0,1,2. (3.17)
Теперь сопоставим (3.16) на (𝑁 − 2) сдвинутых корнях Якоби, чтобы получить
1𝑇3𝑁𝑗 = 3𝑎𝑗 (𝑗 + 𝜆) 3𝑃 (𝛼 + 3, 𝛽 + 3) 𝑇, 𝑗 − 3𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘 = 𝑓𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘 , 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 1𝑇𝑁𝑗 = 1𝑎𝑗 (𝑗 + 𝜆) 𝑃 (𝛼 + 1, 𝛽 + 1) 𝑇, 𝑗 − 1𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 1𝑇2𝑁𝑗 = 2𝑎𝑗 (𝑗 + 𝜆) 2𝑃 (𝛼 + 2, 𝛽 + 2) 𝑇, 𝑗 − 2𝑡 (𝛼, 𝛽) 𝑇 , 𝑁, 𝑘𝑘 = 0,1,…, 𝑁 − 3 (3.
(3.13)
Теперь выведем алгоритм решения (3.7) и (3.8). Для этого пусть
𝑢𝑁 (𝑡) = 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗𝑎 (𝑡), 𝐚 = 0, 𝑎1,…, 𝑎𝑁𝑇, (3.14)
то с помощью (3.14) и, соответственно, по (3.7) принимает вид
𝑁𝑗 = 0𝑎𝑗𝐷3𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡) = 𝑓𝑡, 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡), 𝑁𝑗 = 0𝑎𝑗𝐷𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (𝑡), 𝑁𝑗 = 0𝑎𝑗𝐷2𝑃 (𝛼, 𝛽) 𝑇, 𝑗. (𝑡) (3.15)
и в силу (2.4) выводим, что
1𝑇3𝑁𝑗 = 3𝑎𝑗 (𝑗 + 𝜆) 3𝑃 (𝛼 + 3, 𝛽 + 3) 𝑇, 𝑗 − 3 (𝑡) = 𝑓𝑡, 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗1 (𝑡), 𝑇𝑁 𝑗 = 1𝑎𝑗 (𝑗 + 𝜆) 𝑃 (𝛼 + 1, 𝛽 + 1) 𝑇, 𝑗 − 11 (𝑡), 𝑇2𝑁𝑗 = 2𝑎𝑗 (𝑗 + 𝜆) 2𝑃 (𝛼 + 2, 𝛽 + 2) 𝑇, 𝑗 − 2. (𝑡) (3.16)
Подстановка (3.14) в (3.8) дает
𝑁𝑗 = 0𝑎𝑗𝐷𝑖𝑃 (𝛼, 𝛽) 𝑇, 𝑗 (0) = 𝑑𝑖, 𝑖 = 0,1,2. (3.17)
Теперь сопоставим (3.16) на (𝑁 − 2) сдвинутых корнях Якоби, чтобы получить
1𝑇3𝑁𝑗 = 3𝑎𝑗 (𝑗 + 𝜆) 3𝑃 (𝛼 + 3, 𝛽 + 3) 𝑇, 𝑗 − 3𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘 = 𝑓𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘 , 𝑁𝑗 = 0𝑎𝑗𝑃 (𝛼, 𝛽) 𝑇, 𝑗𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 1𝑇𝑁𝑗 = 1𝑎𝑗 (𝑗 + 𝜆) 𝑃 (𝛼 + 1, 𝛽 + 1) 𝑇, 𝑗 − 1𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 1𝑇2𝑁𝑗 = 2𝑎𝑗 (𝑗 + 𝜆) 2𝑃 (𝛼 + 2, 𝛽 + 2) 𝑇, 𝑗 − 2𝑡 (𝛼, 𝛽) 𝑇 , 𝑁, 𝑘𝑘 = 0,1,…, 𝑁 − 3 (3. 18)
Используя (2.7) при = 1 и = 2, (3.17) можно записать в виде
𝑁𝑗 = 0 (−1) 𝑗Γ (𝑗 + 𝛽 + 1) 𝑎Γ (𝛽 + 1) 𝑗! 𝑗 = 𝑑0, 𝑁𝑗 = 1 (−1) 𝑗 − 1Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) 𝑇𝑎 (𝑗 − 1)! Γ (𝛽 + 2) 𝑗 = 𝑑1, 𝑁𝑗 = 2 (−1) 𝑗 − 2Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) 2𝑇2𝑎 (𝑗 − 2)! Γ (𝛽 + 3) 𝑗 = 𝑑2. (3.19)
18)
Используя (2.7) при = 1 и = 2, (3.17) можно записать в виде
𝑁𝑗 = 0 (−1) 𝑗Γ (𝑗 + 𝛽 + 1) 𝑎Γ (𝛽 + 1) 𝑗! 𝑗 = 𝑑0, 𝑁𝑗 = 1 (−1) 𝑗 − 1Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) 𝑇𝑎 (𝑗 − 1)! Γ (𝛽 + 2) 𝑗 = 𝑑1, 𝑁𝑗 = 2 (−1) 𝑗 − 2Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) 2𝑇2𝑎 (𝑗 − 2)! Γ (𝛽 + 3) 𝑗 = 𝑑2. (3.19)
Схема (3.18) – (3.19) может быть переписана в более подходящей компактной матричной форме. Для этого определим матрицу (𝑁 + 1) × (𝑁 + 1) 𝐴 с элементами 𝑎𝑘𝑗 следующим образом:
𝑎𝑘𝑗 = ⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩ (𝑗 + 𝜆) 3𝑇3𝑃 (𝛼 + 3, 𝛽 + 3) 𝑇, 𝑗 − 3𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 0≤𝑘 ≤𝑁 − 3,3≤𝑗≤𝑁, (- 1) 𝑗Γ (𝑗 + 𝛽 + 1) Γ (𝛽 + 1) 𝑗!, 𝑘 = 𝑁 − 2,3≤𝑗≤𝑁, (- 1) 𝑗− 1Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) (𝑇 (𝑗 − 1)! Γ (𝛽 + 2), 𝑘 = 𝑁 − 1,3≤𝑗≤𝑁, −1) 𝑗 − 2Γ (𝑗 + 𝛽 + 1) (𝑗 + 𝛼 + 𝛽 + 1) 2𝑇2 (𝑗 − 2)! Γ (𝛽 + 3), 𝑘 = 𝑁, 3≤𝑗≤𝑁, 0 в противном случае.(3.20)
Кроме того, мы определяем (𝑁 − 2) × (𝑁 + 1) три матрицы 𝐵, 𝐶 и с элементами 𝑏𝑘𝑗, 𝑐𝑘𝑗 и следующим образом:
𝑏𝑘𝑗 = 𝑃 (𝛼, 𝛽) 𝑇, 𝑗𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘𝑐, 0≤𝑘≤𝑁 − 3,0≤𝑗≤𝑁, 𝑘𝑗 = (𝑗 + 𝜆) 𝑇𝑃 ( 𝛼 + 1, 𝛽 + 1) 𝑇, 𝑗 − 1𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘𝑑, 0≤𝑘≤𝑁 − 3,1≤𝑗≤𝑁, 0,0≤𝑘≤𝑁− 3, 𝑗 = 0, 𝑘𝑗 = ⎧⎪⎨⎪⎩ (𝑗 + 𝜆) 2𝑇2𝑃 (𝛼 + 2, 𝛽 + 2) 𝑇, 𝑗 − 2𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘, 0≤𝑘 ≤𝑁 − 3,2≤𝑗≤𝑁, 0,0≤𝑘≤𝑁 − 3, 𝑗 = 0,1. (3.21)
Далее, пусть 𝐚 = (𝑎0, 𝑎1,…, 𝑎𝑁) 𝑇, и (𝐚) = (𝛼, 𝛽) 𝑇, 𝑁, 0, 𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0 , 𝜕𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0, 𝜕2𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0𝑓𝑡,…, (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3 , (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3, 𝜕𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3, 𝜕2𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 −3, 𝑑0, 𝑑1, 𝑑2𝑇, (3.22)
где 𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘), 𝜕𝑡𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘) и 2𝑡𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘) – 𝑘-й компонент 𝐵𝐚, 𝐶𝐚 и соответственно. Схема (3.18) – (3.19) может быть записана в матричном виде
𝐴𝐚 = 𝐅 (𝐚), (3.23)
или эквивалентно
𝐚 = 𝐴 − 1𝐅 (𝐚), (3.24)
который составляет (𝑁 + 1) нелинейное алгебраическое уравнение, которое может быть решено относительно неизвестных коэффициентов 𝑎𝑗 с помощью известного метода Ньютона, и, следовательно, 𝑢𝑁 (𝑡), заданное в (3.14), может быть вычислено. Встроенный пакет в системе Mathematica версии 6 под названием « FindRoot » ищет решение для одновременной нелинейной системы (3.24) на основе метода Ньютона с нулевым исходным предположением.
(3.21)
Далее, пусть 𝐚 = (𝑎0, 𝑎1,…, 𝑎𝑁) 𝑇, и (𝐚) = (𝛼, 𝛽) 𝑇, 𝑁, 0, 𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0 , 𝜕𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0, 𝜕2𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 0𝑓𝑡,…, (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3 , (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3, 𝜕𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 − 3, 𝜕2𝑡𝑢𝑁𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑁 −3, 𝑑0, 𝑑1, 𝑑2𝑇, (3.22)
где 𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘), 𝜕𝑡𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘) и 2𝑡𝑢𝑁 (𝑡 (𝛼, 𝛽) 𝑇, 𝑁, 𝑘) – 𝑘-й компонент 𝐵𝐚, 𝐶𝐚 и соответственно. Схема (3.18) – (3.19) может быть записана в матричном виде
𝐴𝐚 = 𝐅 (𝐚), (3.23)
или эквивалентно
𝐚 = 𝐴 − 1𝐅 (𝐚), (3.24)
который составляет (𝑁 + 1) нелинейное алгебраическое уравнение, которое может быть решено относительно неизвестных коэффициентов 𝑎𝑗 с помощью известного метода Ньютона, и, следовательно, 𝑢𝑁 (𝑡), заданное в (3.14), может быть вычислено. Встроенный пакет в системе Mathematica версии 6 под названием « FindRoot » ищет решение для одновременной нелинейной системы (3.24) на основе метода Ньютона с нулевым исходным предположением.
4. Численные результаты
Чтобы проиллюстрировать эффективность предложенного алгоритма в этой статье, в этом разделе выполнены три тестовых примера. Сравнение полученных нами результатов с результатами, полученными с помощью некоторых других алгоритмов, показывает, что данный метод очень эффективен и более удобен.
Сравнение полученных нами результатов с результатами, полученными с помощью некоторых других алгоритмов, показывает, что данный метод очень эффективен и более удобен.
Рассмотрим следующие примеры.
Пример 4.1. Рассмотрим следующее линейное дифференциальное уравнение третьего порядка [22, 25]: 𝑢 (𝑡) −2𝑢 (𝑡) −3𝑢 (𝑡) + 10𝑢 (𝑡) = 34𝑡𝑒 − 2𝑡 − 16𝑒 − 2𝑡 − 10𝑡2 [], + 6𝑡 + 34, 𝑡∈0, 𝑏 (4 .1) при начальных условиях 𝑢 (0) = 3, 𝑢 (0) = 0, 𝑢 (0) = 0, (4.2) с точным решением 𝑢 (𝑡) = 𝑡2𝑒 − 2𝑡 − 𝑡2 + 3. (4.3)
Похожая задача была также исследована Авойеми [25] с использованием P-стабильного линейного многоступенчатого метода и Mehrkanoon [22] с использованием блочного многошагового метода прямого переменного шага. .
При = 1 в [22, 25] наилучшие результаты достигаются при 200 и 32 шагах, а максимальные абсолютные ошибки составляют 44,89⋅10−7 и 6,54⋅10−10 соответственно, а при 𝑏 = 4 , максимальные абсолютные ошибки равны 1.46⋅10−4 и 6.19⋅10−9 с 800 и 50 шагами, используя методы, описанные в [25] и [22], соответственно. В таблице 1 мы вводим максимальную абсолютную ошибку, используя SJCM с различными вариантами выбора 𝛼, 𝛽 и 𝑁. Численные результаты этого линейного дифференциального уравнения третьего порядка показывают, что SJCM сходится экспоненциально и является более точным, чем два метода в [22, 25].
В таблице 1 мы вводим максимальную абсолютную ошибку, используя SJCM с различными вариантами выбора 𝛼, 𝛽 и 𝑁. Численные результаты этого линейного дифференциального уравнения третьего порядка показывают, что SJCM сходится экспоненциально и является более точным, чем два метода в [22, 25].
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 66⋅10−1
66⋅10−1 94⋅10−16
94⋅10−16Пример 4.2. Рассмотрим следующее нелинейное дифференциальное уравнение третьего порядка [22, 30]: 𝑢 (𝑡) + 2𝑒 − 3𝑢 (𝑡) = 4 (1 + 𝑡) −3 [] ,, 𝑡∈0, 𝑏 (4.4) при начальных условиях 𝑢 (0) = 0, 𝑢 (0) = 1, 𝑢 (0) = – 1, (4.5) с точным решением 𝑢 (𝑡) = ln (1 + 𝑡). (4.6)
Этот тип уравнения был решен в [22, 30] с помощью B-сплайновых функций четвертой степени и в [22] с использованием блока прямого переменного шага многоступенчатый метод.
В таблице 2 мы перечисляем результаты, полученные с помощью предложенного в данной статье метода смещенной коллокации Якоби-Гаусса с 𝛼 = 𝛽 = 0 (метод смещенной коллокации Лежандра-Гаусса), 𝛼 = 𝛽 = −1 / 2 (первый род метод смещенной коллокации Чебышева-Гаусса) и 𝛼 = 𝛽 = 1/2 (метод смещенной коллокации Чебышева-Гаусса второго рода). Отображаемые результаты показывают, что значение 𝛼 = 𝛽 = 0 быстрее, чем другие протестированные значения 𝛼 и, а метод SJCM сходится экспоненциально и более точен, чем многоступенчатый метод прямого переменного шага [22].
Отображаемые результаты показывают, что значение 𝛼 = 𝛽 = 0 быстрее, чем другие протестированные значения 𝛼 и, а метод SJCM сходится экспоненциально и более точен, чем многоступенчатый метод прямого переменного шага [22].
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5
5 5
5 Примечание 4. 3. Серия Тейлора
1ln (1 + 𝑡) = 𝑡 − 2𝑡2 + 13𝑡3− ⋯ (4.7)
сходится очень медленно около 𝑡 = 1, и необходимо 104 члена, чтобы гарантировать ошибку усечения менее 10−4. В терминах сдвинутых многочленов Якоби (𝛼 = 𝛽 = −1 / 2) находим (см. [31])
√ln (1 + 𝑡) = ln3 + 224𝑇 ∗ 0 (𝑡) + 2𝜆𝑇 ∗ 11 (𝑡) −2𝜆2𝑇 ∗ 21 (𝑡) + 3𝜆3𝑇 ∗ 3 (𝑡) – ⋯, (4.8)
где √𝜆 = 3−22 и 𝑇 ∗ 𝑖 (𝑡) = 𝑃 (−1 / 2, −1 / 2) 1, 𝑖 (𝑡) – сдвинутый многочлен Чебышева первого рода, определенный на [0,1]. Это выражение похоже по форме на ряд Тейлора, но сходится гораздо быстрее.Фактически, усечение после члена в 𝑇 ∗ 3 (𝑡) дает ошибку, главный член которой составляет 4/2, что меньше (1/2) × 10−3, по сравнению с 0,25 соответствующего усечения ряда Тейлора.
3. Серия Тейлора
1ln (1 + 𝑡) = 𝑡 − 2𝑡2 + 13𝑡3− ⋯ (4.7)
сходится очень медленно около 𝑡 = 1, и необходимо 104 члена, чтобы гарантировать ошибку усечения менее 10−4. В терминах сдвинутых многочленов Якоби (𝛼 = 𝛽 = −1 / 2) находим (см. [31])
√ln (1 + 𝑡) = ln3 + 224𝑇 ∗ 0 (𝑡) + 2𝜆𝑇 ∗ 11 (𝑡) −2𝜆2𝑇 ∗ 21 (𝑡) + 3𝜆3𝑇 ∗ 3 (𝑡) – ⋯, (4.8)
где √𝜆 = 3−22 и 𝑇 ∗ 𝑖 (𝑡) = 𝑃 (−1 / 2, −1 / 2) 1, 𝑖 (𝑡) – сдвинутый многочлен Чебышева первого рода, определенный на [0,1]. Это выражение похоже по форме на ряд Тейлора, но сходится гораздо быстрее.Фактически, усечение после члена в 𝑇 ∗ 3 (𝑡) дает ошибку, главный член которой составляет 4/2, что меньше (1/2) × 10−3, по сравнению с 0,25 соответствующего усечения ряда Тейлора.
Пример 4.4. Рассмотрим следующую сингулярную нелинейную задачу 𝑢2 (𝑡) + 𝑡𝑢 (𝑡) −𝑢 (𝑡) 𝑢 (𝑡) −16𝜋2𝑢2 (𝑡) = 8𝜋𝑡 − 64𝜋3 [], cos (4𝜋𝑡), 𝑡∈0,1𝑢 ( 0) = 0, 𝑢 (0) = 4𝜋, 𝑢 (0) = 0, (4.9) с точным решением 𝑢 (𝑡) = sin (4𝜋𝑡).
В таблице 3 мы вводим максимальную абсолютную ошибку, используя SJCM с различными вариантами выбора 𝛼, 𝛽 и 𝑁. Численные результаты этого примера показывают, что SJCM сходится экспоненциально для всех значений и, это также указывает на то, что численное решение сходится быстро при увеличении 𝑁. Приближенные решения в нескольких точках коллокации (𝑁 = 12) для 𝛼 = 𝛽 = 0, 𝛼 = 𝛽 = 0,5 и 𝛼 = 𝛽 = 1, а также точное решение этого примера изображены на рисунке 1, из которого очевидно что в случае 𝛼 = 𝛽 = 0 с несколькими точками коллокации приближенное решение очень хорошо согласуется с точным решением. Из таблицы 3 и рисунка 1 значения 𝛼 = 𝛽 = 0 дают наилучшую точность среди всех протестированных значений 𝛼 и для всех значений.
Численные результаты этого примера показывают, что SJCM сходится экспоненциально для всех значений и, это также указывает на то, что численное решение сходится быстро при увеличении 𝑁. Приближенные решения в нескольких точках коллокации (𝑁 = 12) для 𝛼 = 𝛽 = 0, 𝛼 = 𝛽 = 0,5 и 𝛼 = 𝛽 = 1, а также точное решение этого примера изображены на рисунке 1, из которого очевидно что в случае 𝛼 = 𝛽 = 0 с несколькими точками коллокации приближенное решение очень хорошо согласуется с точным решением. Из таблицы 3 и рисунка 1 значения 𝛼 = 𝛽 = 0 дают наилучшую точность среди всех протестированных значений 𝛼 и для всех значений.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
 38⋅10−1
38⋅10−15. Заключение
Для решения нелинейного третьего порядка предлагается эффективный и точный численный алгоритм на основе коллокационного метода Якоби-Гаусса. дифференциальные уравнения.Задача сводится к решению системы одновременных нелинейных алгебраических уравнений. Насколько нам известно, это первая работа, посвященная алгоритму коллокации Якоби-Гаусса для решения общих дифференциальных уравнений третьего порядка. Были приведены численные примеры, демонстрирующие достоверность и применимость алгоритма. Результаты показывают, что метод прост и точен. Фактически, при выборе нескольких точек сопоставления получаются превосходные численные результаты. Численные результаты в таблицах 1–3 позволяют сделать вывод, что разложение на основе полиномов Чебышева (= 𝛽 = −1 / 2) не всегда является лучшим.Этот вывод был подтвержден Лайт [32].
дифференциальные уравнения.Задача сводится к решению системы одновременных нелинейных алгебраических уравнений. Насколько нам известно, это первая работа, посвященная алгоритму коллокации Якоби-Гаусса для решения общих дифференциальных уравнений третьего порядка. Были приведены численные примеры, демонстрирующие достоверность и применимость алгоритма. Результаты показывают, что метод прост и точен. Фактически, при выборе нескольких точек сопоставления получаются превосходные численные результаты. Численные результаты в таблицах 1–3 позволяют сделать вывод, что разложение на основе полиномов Чебышева (= 𝛽 = −1 / 2) не всегда является лучшим.Этот вывод был подтвержден Лайт [32].
Благодарность
Авторы очень благодарны рецензентам за внимательное чтение статьи, а также за их комментарии и предложения, которые улучшили ее.
Семейство сингулярных обыкновенных дифференциальных уравнений третьего порядка с интегральным граничным условием | Граничные задачи
Предварительно мы приведем некоторые результаты, которые будут полезны в следующих разделах.
Лемма 2.{1} {d \ xi \ over \ sqrt {\ xi (1- \ xi)}} = B \ biggl ({1 \ over 2}, {1 \ over 2} \ biggr) = {\ Gamma ({1 \ над 2}) \ Gamma ({1 \ over 2}) \ over \ Gamma (1)} = \ pi. \ end {align} $$
□
Теорема 2.2
y является решением сингулярной краевой задачи (1.1) тогда и только тогда, когда y является решением интегрального уравнения Вольтерра (1.2) для любого действительного параметра \ (\ лямбда> 0 \).{2} y (t), \ quad0 (2.16) , поэтому сингулярные краевые задачи (1.1) верны для любого действительного параметра \ (\ lambda> 0 \), таким образом, доказательство теоремы завершено. □ Хорошо известно, что существует единственное решение интегрального уравнения Вольтерра (1.3), т. Е. Интегральное уравнение Вольтерра (1.2), расширенное для \ (t> 0 \); см. (2.19) – это ряд с бесконечными радиусами сходимости, и мы используем определение $$ (2n + 1) !! = (2n + 1) (2n-1) (2n-3) \ cdots 5 \ cdot3 \ cdot1. $ для выражения компактности . Используя метод Адомиана [55, 56], мы предлагаем для решения интегрального уравнения Вольтерра (1.{t} u_ {x} (0, \ tau) \, d \ tau, \ quad x> 0, t> 0, \ end {align} $$ (2.20) $$ \ begin {выровнен} & u (0, t) = 0, \ quad t> 0, \ end {выравнивается} $$ (2.21) $$ \ begin {align} & u (x, 0) = h_ {0}> 0, \ quad x> 0, \ end {выравнивается} $$ (2.22) с параметром \ (\ lambda \ in {\ mathbb {R}} \). {(n-1)} + \ cdots + P_n (x) y = 0 \ nonumber \] и \ (u_1 \), \ (u_2 \),…, \ (u_n \) – это функции, которые необходимо определить.{(r)} _ n, \ 0 \ le r \ le n-1. \] Эти формулы легко запомнить, поскольку они выглядят так, как будто мы получили их, дифференцируя уравнение \ ref {eq: 9.4.2} \ (n-1 \) раз при обработке \ (u_1 \), \ (u_2 \), …, \ (U_n \) как константы. Чтобы увидеть, что из уравнения \ ref {eq: 9.4.3} следует уравнение \ ref {eq: 9.4.4}, сначала дифференцируем уравнение \ ref {eq: 9.4.2}, чтобы получить \ [y_p ‘= u_1y_1’ + u_2y_2 ‘+ \ cdots + u_ny_n’ + u_1’y_1 + u_2’y_2 + \ cdots + u_n’y_n, \ nonumber \] , что сокращается до \ [y_p ‘= u_1y_1’ + u_2y_2 ‘+ \ cdots + u_ny_n’ \ nonumber \] из-за первого уравнения в уравнении \ ref {eq: 9.{n-j} {FW_j \ over P_0W}, \ quad 1 \ le j \ le n, \] , где \ (W_j \) – вронскиан набора функций, полученных удалением \ (y_j \) из \ (\ {y_1, y_2, \ dots, y_n \} \) и сохранением остальных функций в том же порядке. Эквивалентно, \ (W_j \) – это определитель, полученный путем удаления последней строки и \ (j \) – го столбца \ (W \). Получив \ (u_1 ‘\), \ (u_2’ \) \ (, \ dots, \) \ (u_n ‘\), мы можем проинтегрировать, чтобы получить \ (u_1, \, u_2, \ dots, u_n \) . Как и в разделе 5.7, мы принимаем постоянные интегрирования равными нулю и отбрасываем любую линейную комбинацию \ (\ {y_1, y_2, \ dots, y_n \} \), которая может появиться в \ (y_p \).{(n-1)} W_ {j}. \ nonumber \] Если \ (n = 3 \), то \ [W = \ left | \ begin {array} {ccc} y_1 & y_2 & y_3 \\ [4pt] y’_1 & y’_2 & y’_3 \\ [4pt] y ” _ 1 & y ” _ 2 & y ” _ 3 \ end {array} \ right |. \ nonumber \] Следовательно \ [W_1 = \ left | \ begin {array} {cc} y_2 & y_3 \\ [4pt] y’_2 & y’_3 \ end {array} \ right |, \ quad W_2 = \ left | \ begin {array} {cc} y_1 & y_3 \\ [4pt] y’_1 & y’_3 \ end {array} \ right |, \ quad W_3 = \ left | \ begin {array} {cc} y_1 & y_2 \\ [4pt] y’_1 & y’_2 \ end {array} \ right |, \ nonumber \] и уравнение \ ref {eq: 9.{-x}. \ nonumber \] Если \ (n = 4 \), то \ [W = \ left | \ begin {array} {cccc} y_1 & y_2 & y_3 & y_4 \\ [4pt] y’_1 & y’_2 & y’_3 & y_4 ‘\\ [4pt] y’ ‘_ 1 & y’ ‘_ 2 & y’ ‘_ 3 & y_4’ ‘\\ [4pt] y’ ” _ 1 & y ‘ ” _2 & y ” ‘_ 3 & y_4’ ” \ end {array} \ right |, \ nonumber \] Следовательно \ [W_1 = \ left | \ begin {array} {ccc} y_2 & y_3 & y_4 \\ [4pt] y’_2 & y’_3 & y_4 ‘\\ [4pt] y’ ‘_ 2 & y’ ‘_ 3 & y_4’ ‘\ end {array} \ right |, \ quad W_2 = \ left | \ begin {array} {ccc} y_1 & y_3 & y_4 \\ [4pt] y’_1 & y’_3 & y_4 ‘\\ [4pt] y’ ‘_ 1 & y’ ‘_ 3 & y_4’ ‘\ end {array} \ right |, \ nonumber \] \ [W_3 = \ left | \ begin {array} {ccc} y_1 & y_2 & y_4 \\ [4pt] y’_1 & y’_2 & y_4 ‘\\ [4pt] y’ ‘_ 1 & y’ ‘_ 2 & y_4’ ‘\ end {array} \ right |, \ quad W_4 = \ left | \ begin {array} {ccc} y_1 & y_2 & y_3 \\ [4pt] y_1 ‘& y’_2 & y_3’ \\ [4pt] y_1 ” & y ” _ 2 & y_3 ” \ end {array} \ right |, \ nonumber \] и уравнение \ ref {eq: 9.2} \ nonumber \] – это общее решение уравнения \ ref {eq: 9.4.10} на \ ((- \ infty, 0) \) и \ ((0, \ infty) \). % PDF-1.4
%
1 0 объект
>
эндобдж
5 0 obj
>
эндобдж
2 0 obj
>
транслировать
application / pdf [49, 54]. Теперь мы найдем явное решение интегрального уравнения Вольтерра (1.{{3 (2n + 1)} \ over 2} \ over (3 (2n + 1)) !!}, \ end {align} $$
[49, 54]. Теперь мы найдем явное решение интегрального уравнения Вольтерра (1.{{3 (2n + 1)} \ over 2} \ over (3 (2n + 1)) !!}, \ end {align} $$ Проба
Уравнения третьего порядка
Уравнения четвертого порядка
Описание обыкновенных дифференциальных уравнений третьего порядка, допускающих транзитивную группу симметрии точки, сохраняющей волокно
Произошла ошибка при настройке вашего пользовательского файла cookie
Произошла ошибка при настройке вашего пользовательского файла cookieЭтот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файлах cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.