
что это, зачем он нужен, как работает –
ГлавнаяОбзоры
Средняя оценка0
Сохранить в закладкиСохраненоУдалено 0
Средняя оценка0
0 13784
Примерно десять лет назад в мобильных устройствах появилась невероятная функция: вы поворачивали корпус устройства, и картинка на экране поворачивалась вслед за ним! Прошло совсем немного времени, и мы массово узнали слово «гироскоп», что это такое, как работает и какие его свойства. Кто еще не разобрался в данном вопросе, мы подробно расскажем в нашей статье.
Содержание страницы
- 1 Кто и когда изобрёл
- 2 Гиродатчики в смартфонах и планшетах
- 2.1 Калибровка
- 2.2 Как включить гиродатчик на Андроид
- 2.3 Как проверить, есть ли датчик в смартфоне
- 2.4 Что делать, если в смартфоне нет гироскопического прибора
- 3 Гироскоп в часах и в фитнес-браслете
- 4 Гироскопы в других устройствах
- 5 Вывод
Кто и когда изобрёл
Как часто бывает, изобретение это оказалось совсем не новым. В начале XIX века гироскоп изобрёл немецкий физик Иоганн Готтлиб Фридрих фон Боненбергер.
В начале XIX века гироскоп изобрёл немецкий физик Иоганн Готтлиб Фридрих фон Боненбергер.
В середине XIX века изобретение Боненбергера доработал француз Фуко – тот самый, создатель знаменитого маятника. Тогдашние приборы использовали сложную систему механической балансировки массивного тела, чтобы оно оставалось на месте. А угол наклона тела по отношению к земной оси можно было измерить по изменению положений опор груза. Таким образом, прибор определял направление движения в пространстве через угол наклона к земной оси.
Принцип работы гироскопа в мобильном устройстве несколько иной: чтобы вписаться в миниатюрный чип, используются специальные конденсаторы, которые считывают смещение кристалла внутри чипа и так измеряют его отклонение от оси.
На сегодняшний день гироскоп в телефоне – вещь обязательная. До этого за определение положения отвечали одни только акселерометры – они худо-бедно справлялись, но, как оказалось, можно и лучше. Сегодня используются комбинированные модули из акселерометра и гироскопа, которые позволяют с высокой точностью отслеживать движения и посылать данные на обработку.
Гиродатчики в смартфонах и планшетах
Начиная с 2010 года, компания Apple снабдила iPhone 4 и последующие модели комбинацией из гироскопа и акселерометра. Такие комбинированные датчики очень хорошо отслеживают изменение положения смартфона или другого устройства (например, фитнес-трекера или умных часов). Чуть позже появился гироскоп в смартфоне на базе Андроид и планшете.
Теперь уже сложно представить себе устройство, не реагирующее на поворот. Наоборот, в моде тонкое управление. Например, вы можете рулить машиной в виртуальных гонках, просто вращая в руках телефон, как «баранку». Когда вы читаете книгу, экран может повернуться вправо или влево, и даже вверх ногами; но если вы выходите на рабочий стол телефона, поворот отключается. А вот планшет того же производителя и с той же версией ОС на поворот отреагирует и превратится в подобие ноутбука. И это только малая часть примеров тонкой настройки. В конце концов, в настройках можно вообще выключить и снова включить гироскоп на Андроиде, если в одних ситуациях он полезен, а в других мешает.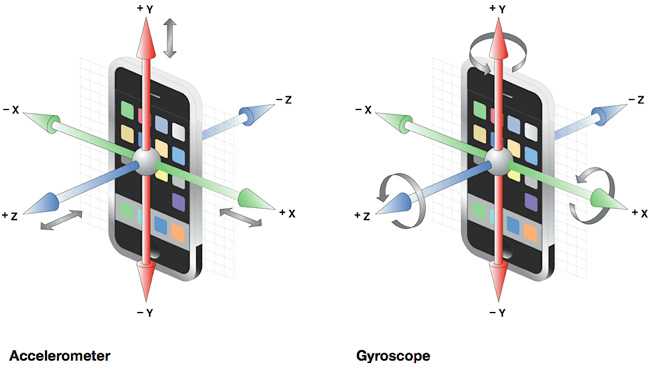
Калибровка
Датчик гироскопа в смартфоне – это ценнейший инструмент, но иногда он сбивается. К счастью, его можно откалибровать заново практически во всех актуальных моделях.
Калибровка гироскопа в Android делается с помощью соответствующих приложений. Чтобы откалибровать навигационный прибор на Андроид, лучше всего воспользоваться сторонним приложением. Дело в том, что разные производители используют несколько разные технологии и разные чипы, поэтому приложение, совместимое со всеми устройствами, должно быть независимым. Мы можем рекомендовать вам приложение Accelerometer Calibration Free. К сожалению, у него нет русскоязычного интерфейса, однако оно достаточно понятно и без перевода.
Apple, совершенно в своей манере, предполагает, что калибровка датчика в iPhone не нужна. Лукавит, конечно. Настроить гироскоп в айфоне бывает просто необходимо.
Для рекалибровки рекомендуют следующий сценарий действий:
- Перезагрузите (выключите и включите) iPhone.
- Запустите приложение «Компас».
- Если калибровка датчиков сбилась, приложение само запустит режим калибровки.
- Наклоняйте iPhone из стороны в сторону, пока круг калибровки не заполнится.
- Когда приложение покажет вам собственно компас, это означает, что прибор откалиброван.
Как включить гиродатчик на Андроид
Для того чтобы включить гироскоп на Андроид нужно выполнить следующие действия:
- Открыть верхнее меню (шторку) в телефоне
- Активировать «Автоповорот». В вашем смартфоне название может отличаться, например, «Книжный экран».
Как проверить, есть ли датчик в смартфоне
Как узнать, есть ли гироскоп в телефоне на Android? Это не сложно, следуйте нашим рекомендациям.
Скачивайте и устанавливайте любое из этих трех приложений, в которых можно посмотреть детально все датчики:
- AnTuTu
- Aida64
- Sensor Sense Toolbox
У смартфонов Apple проще, у всех моделей, начиная с iPhone 4 и выше, датчики гироскопа по умолчанию встроены в плату.
Так выглядит устройство гироскопа в смартфоне:
Что делать, если в смартфоне нет гироскопического прибора
Если нет гироскопа в телефоне, то есть три решения.
- Первый, самый верный, — это купить смартфон с нужным датчиком.
- Про второй и третий вариант смотрите подробное видео (при просмотре не обращайте внимание на голос и дикцию, досмотрите до конца и вы поймете, какой именно способ вам подойдет).
Гироскоп в часах и в фитнес-браслете
Гироскоп в часах – это один из важнейших элементов взаимодействия с миром. Когда вы поднимаете руку с носимым устройством, и в нем включается дисплей – это работает он, родимый. Когда новейшие Apple Watch распознают, что владелец упал и лежит без движения, и вызывают 911 – за спасение своей жизни хозяин должен сказать спасибо этому датчику. Также гироскоп отвечает за фитнес-функции, которые есть во всех современных моделях умных часов.
Он же помогает умному трекеру отследить, как вы ворочаетесь во сне, и оценить качество вашего сна. А более тонкое определение движений помогает распознавать разные виды спорта, которыми вы занимаетесь. Именно гироскоп в фитнес-браслете определяет количество сделанных вами шагов, по тому, как меняется ваше положение во время шага.
Гироскопы в других устройствах
Мы не берём в расчёт применение прибора в транспортных средствах или профессиональных системах навигации. Существуют и относительно небольшие устройства, в которых применяется навигационный прибор. Просто перечислим некоторые из них:
- Геймпады. Современные игровые приставки (Xbox, Playstation) оснащаются контроллерами, которые реагируют на наклон. Это придаёт управлению больше динамики.
- Механические часы. Назвать «массовыми» часики за полмиллиона долларов язык, конечно, не повернётся. Но увидеть, как циферблат в них принимает горизонтальное положение при любом повороте – бесценно.
- Сегвеи.
 Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Вывод
Хотя современные устройства от чистой механики перешли к электронике, принцип гироскопа всё равно остаётся актуальным. За последние годы мы оценили, как облегчают жизнь датчики поворота и движения. И, поверьте, чем умнее и подвижнее становится техника, тем важнее будут сенсоры движения и наклона.
- Была ли полезной информация ?
- ДаНет
Электронный гироскоп
Изобретение относится к области измерительной техники и может быть использовано в приборостроении и машиностроении для измерения угловой скорости. Гироскоп содержит пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП), отражающие структуры драйвера поверхностных акустических волн, а также электроды чувствительного элемента разности потенциалов, размещенные попарно за пределами ВШП на расстояниях, не меньших половины периода стоячих поверхностных акустических волн, и параллельно направлению распространения поверхностных акустических волн, по одному электроду каждой пары у одного из противоположных краев пластины пьезоэлектрика.
Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижными объектами, и предназначено для измерения угловой скорости в этих системах.
Известные волоконно-оптические гироскопы и лазерные гироскопы широко используются в инерциальной навигации и в системах наведения.
Известны микромеханические гироскопы на основе кремния [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам.
Однако вышеуказанные гироскопы имеют низкую точность и низкую механическую прочность.
Известен также Виброгироскоп (патент РФ №2123219, H01L 41/08, 1998.12.10.), содержащий твердотельный элемент из сегнетоэлектрической керамики с размытым фазовым переходом, в виде монолитного стержня с крестообразным поперечным сечением, с двумя парами сплошных и двумя парами встречно-штыревых электродов. Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора.
Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора.
Стабильность и помехоустойчивость позволяют применять виброгироскоп в компактных системах навигации и автоматического управления подвижными объектами.
Однако виброгироскоп имеет ограничения по рабочим характеристикам из-за принципа действия, который основан на вибрации подвешенных механических структур. Кроме того, эта подвешенная механическая структура очень чувствительна к внешним ударам и вибрации, т.к. она не может быть жестко присоединена к подложке из-за резонансной вибрации. Это ограничивает диапазон его применения.
Наиболее близким по технической сущности к изобретению является гироскоп [Патент US №6,516,665. “Микро-электро-механический гироскоп”/ Varadan V. K., Pascal B., Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V. Varandan. 2003].
K., Pascal B., Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V. Varandan. 2003].
Микро-электро-механический гироскоп включает в себя пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП) драйвера поверхностных акустических волн (ПАВ), ВШП чувствительного элемента колебаний ПАВ и отражающие структуры, расположенные за пределами встречно-штыревых преобразователей.
Принцип действия микро-электро-механического гироскопа основан на использовании поверхностной акустической волны, распространяющейся по пьезоэлектрической подложке. В отличие от других, этот гироскоп имеет планарную конфигурацию без подвешенных резонансных механических структур, вследствие чего является устойчивым и ударопрочным.
Недостатком микро-электро-механического гироскопа является низкая точность и соответственно невозможность использования его для высокоточных применений вследствие того, что электроды ВШП чувствительного элемента колебаний ПАВ неизбирательно воспринимают изменения пьезоэлектрических потенциалов, возникающие при действии разнонаправленных сил Кориолиса, соответствующих разнонаправленным движениям частиц пьезоэлектрической пластины, участвующих в формировании ПАВ.
Задачей настоящего изобретения является повышение чувствительности и точности при измерениях угловой скорости вращения с использованием пьезоэлектрических устройств.
Техническим результатом является повышение точности и чувствительности измерений.
Технический результат достигается тем, что в электронном гироскопе, содержащем пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, согласно изобретению за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях, между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один напротив другого, но ближе к противоположным краям пьезопластины, выполненной из пьезоэлектрика или пьезополупроводника.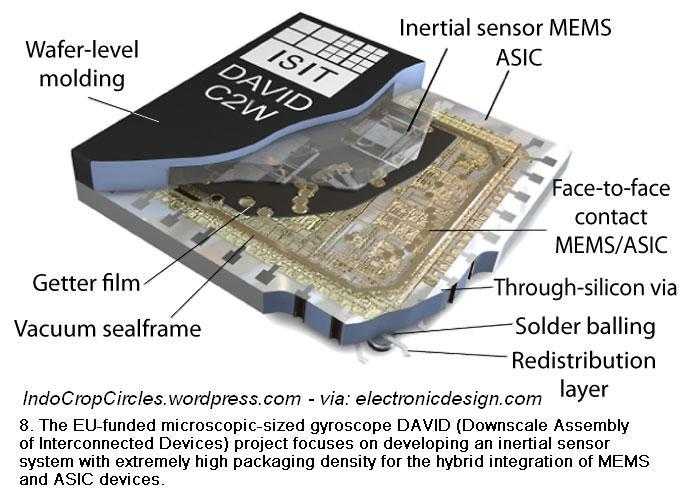
Драйвер поверхностных акустических волн создает поверхностные акустические волны на поверхности пьезопластины, что является первичным вибрационным перемещением для этого гироскопа. Силы Кориолиса и первичные поверхностные акустические волны определяют вторичное вибрационное перемещение (вторичные поверхностные акустические волны) в направлении, ортогональном к направлению первичных поверхностных акустических волн. При этом силы Кориолиса, возникающие при наличии внешнего вращения основания гироскопа и приложенные к частицам пьезоэлектрика или пьезополупроводника, движущимся в одном направлении, противоположны по направлению силам Кориолиса, приложенным к другим частицам пьезоэлектрика или пьезополупроводника, в тот же момент времени на соседнем участке поверхностных акустических волн, движущимся в противоположном направлении.
В отличие от прототипа в электронном гироскопе измеряется не разность потенциалов, создаваемая под действием одновременно разнонаправленных сил Кориолиса всеми пучностями стоячей первичной ПАВ на электродах чувствительного элемента вторичной поверхностной акустической волны, а разность потенциалов, образованная под действием эффекта увлечения частиц пьезоэлектрика или пьезополупроводника одновременно однонаправленными силами Кориолиса, то есть при движении частиц пьезоэлектрика только вдоль тех участков первичной поверхностной акустической волны, которые находятся на расстояниях, кратных периоду поверхностных акустических волн, что позволяет повысить показатели чувствительности и точности при измерении угловой скорости пьезопластины.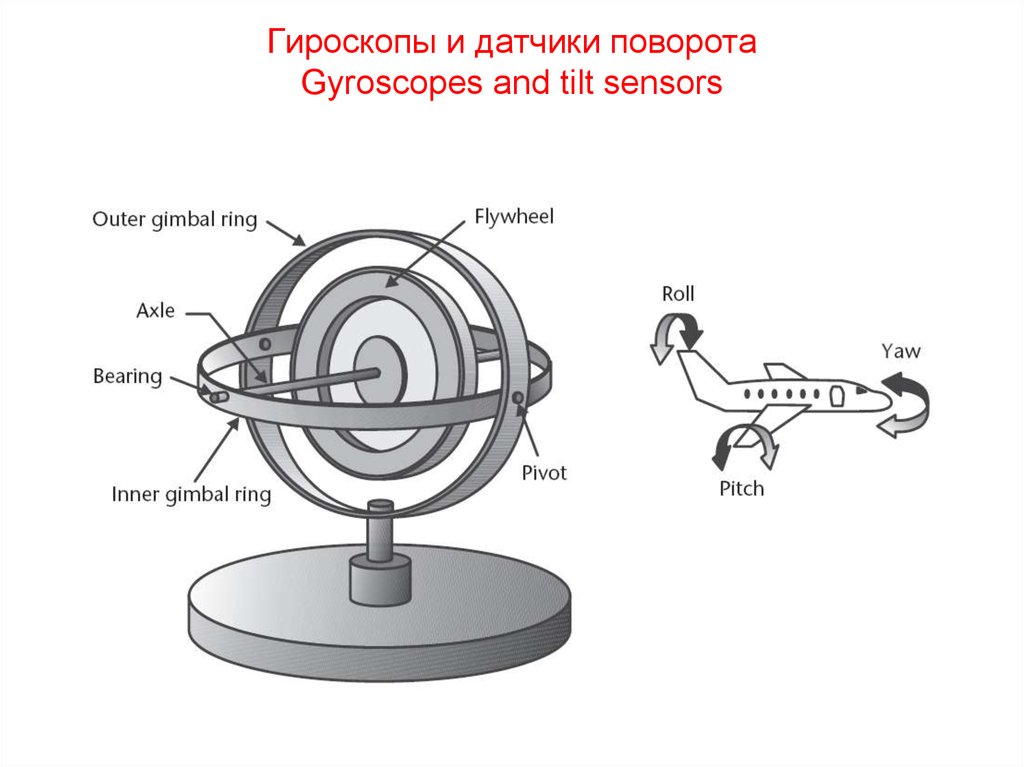
Другим отличием от прототипа является то, что расстояния между электродами одной пары электродов чувствительного элемента разности потенциалов, образующими одну пару, примерно равны апертуре драйвера первичных поверхностных акустических волн, а не как у прототипа, у которого расстояния между электродами одной пары электродов встречно-штыревого преобразователя чувствительного элемента вторичной поверхностной акустической волны соответствуют четверти длины волны вторичной поверхностной акустической волны в той ее части, которая распространяется за пределами апертуры встречно-штыревого преобразователя драйвера первичных поверхностных акустических волн.
Технический результат достигается за счет того, что разности потенциалов вдоль одного из участков первичной поверхностной акустической волны образуются в некоторые моменты времени только под действием однонаправленных сил Кориолиса, что обеспечивает увеличение амплитуды совокупной разности потенциалов на контактных шинах и, тем самым, повышение точности и чувствительности измерений по сравнению с прототипом.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства, отсутствуют, следовательно, заявленное изобретение соответствует условию “новизна”.
В настоящее время автору не известны гироскопы, которые имели бы такую высокую чувствительность и динамический диапазон, подходящий для многих промышленных применений, которые обеспечивает предлагаемая конструкция гироскопа.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует “изобретательскому уровню”.
Сущность изобретения поясняется чертежом, где представлена схема электронного гироскопа.
Электронный гироскоп состоит из основания и выполненных на нем встречно-штыревых преобразователей и отражающих структур.
Основанием электронного гироскопа на ПАВ служит прямоугольная пьезопластина 1, выполненная из пьезоэлектрика или пьезополупроводника, например из кварца, ниобата лития или из CdS, CdSe, слоистой структуры LiNbO3 – Si соответственно [1].
На двух противоположных краях поверхности прямоугольной пьезопластины 1 в направлении распространения первичной ПАВ сформированы отражающие структуры 4 и ВШП 5 драйвера ПАВ, а в ортогональном направлении по обе стороны от апертуры драйвера ПАВ вдоль направления распространения первичной ПАВ сформированы электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 с контактными шинами 2 в соответствующей последовательности.
Отражающие структуры 4 расположены за ВШП 5 драйвера ПАВ, а электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 и контактные шины 2 – между другими двумя противоположными краями пьезопластины 1 вдоль направления распространения первичной ПАВ. Поглотители акустических колебаний 3 выполняют функции поглощения ПАВ так, чтобы поверхность пьезопластины 1 за поглотителями акустических колебаний была нечувствительной к ПАВ, создаваемым ВШП 5 драйвера ПАВ, что позволяет аккумулировать на одной контактной шине потенциалы, одновременно сформированные на электродах чувствительного элемента разности потенциалов 6 под действием сил Кориолиса одного направления.
Поглотители акустических колебаний 3 выполняют функции поглощения ПАВ так, чтобы поверхность пьезопластины 1 за поглотителями акустических колебаний была нечувствительной к ПАВ, создаваемым ВШП 5 драйвера ПАВ, что позволяет аккумулировать на одной контактной шине потенциалы, одновременно сформированные на электродах чувствительного элемента разности потенциалов 6 под действием сил Кориолиса одного направления.
Устройство работает следующим образом. На ВШП 5 драйвера ПАВ от внешнего генератора (не показан) подается электрический сигнал с заданной частотой. Если пьезопластина 1 выполнена из ниобата лития, то электрический сигнал может иметь частоту около 1 ГГц.
Первичные ПАВ создаются на пьезопластине 1 встречно-штыревыми преобразователями 5 драйвера ПАВ и отражающими структурами 4. Поверхностные акустические волны распространяются по пьезопластине 1 в области, ограниченной поглотителями акустических колебаний 3. Распространяясь дальше, первичная ПАВ взаимодействует с отражающими структурами 4.
При появлении внешнего вращения основания гироскопа к вибрирующим заряженным частицам материала пластины пьезоэлектрика 1 прикладываются силы Кориолиса. Напряжение на контактных шинах обусловлено поперечным акустоэлектрическим эффектом, возникающим под действием сил Кориолиса [3].
В результате действия сил Кориолиса вибрирующие заряженные частицы материала пластины пьезоэлектрика 1 смещаются в направлении действия силы Кориолиса, изменяя распределение электрического потенциала. Так возникает разность потенциалов между электродами чувствительного элемента разности потенциалов 6, размещенными у противоположных краев пластины пьезоэлектрика.
Вибрирующие частицы материала пластины пьезоэлектрика 1, смещенные вследствие действия сил Кориолиса, через электроды 6 изменяют потенциалы на контактных шинах 2. Разность потенциалов между контактными шинами 2 является высокочастотным сигналом и может быть измерена, например, анализатором спектра [1].
Для обеспечения возможности суммирования на контактных шинах 2 разностей потенциалов одного знака между электродами 6 и контактными шинами 2 наносится слой поглотителя акустических колебаний 3 или контактные шины размещаются на ребрах жесткости (не показаны), нечувствительных к колебаниям поверхности пьезоэлектрической пластины. В качестве поглотителя акустических колебаний 3 могут использоваться резиноподобные клеи различных марок.
В качестве поглотителя акустических колебаний 3 могут использоваться резиноподобные клеи различных марок.
По разности потенциалов между контактными шинами 2 судят о величине угловой скорости вращения пластины пьезоэлектрика 1. Угловую скорость определяют, например, по градуировочной характеристике гироскопа. При отсутствии внешнего вращения основания гироскопа силы Кориолиса не возникают, поэтому не возникает и разность потенциалов между контактными шинами 2, которая в этом случае практически равна нулю.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполнены следующие условия:
– средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в приборостроении, а именно в системах навигации динамических объектов, в системах управления, в том числе в автомобильной промышленности и робототехнике;
– для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных и других известных до даты подачи заявки средств;
– средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности “промышленная применимость”.
Источники информации
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990.
2. Физическая акустика / Под ред. У.Мэзона. М.: Мир, 1969.
3. Кмита А.М., Медведь А.В. Поперечный акустоэлектрический эффект в слоистой структуре LiNbO3 – Si. “Письма ЖТФ”б, 1971, т.14, в.8, с.455.
1. Электронный гироскоп, содержащий пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, отличающийся тем, что за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один против другого, но ближе к противоположным краям пьезопластины.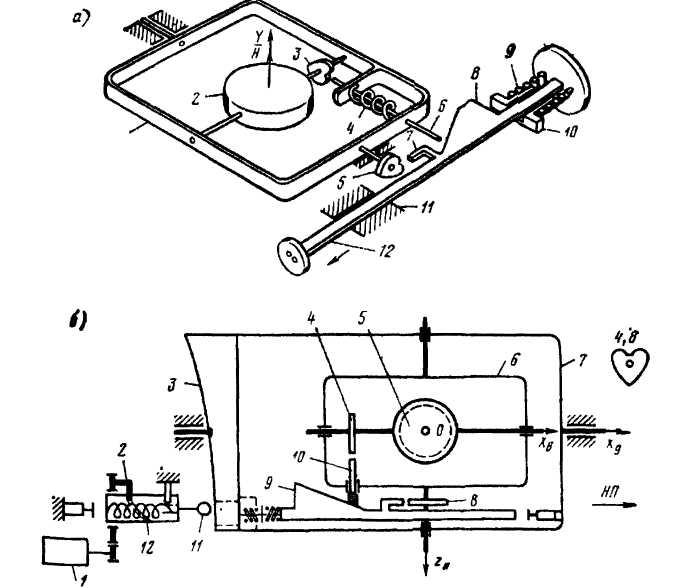
2. Электронный гироскоп по п.1, отличающийся тем, что контактные шины размещены на ребрах жесткости, находящихся на краях пьезопластины и параллельных основному направлению распространения поверхностных акустических волн.
Как работают акселерометры и гироскопы?
Акселерометры и гироскопы можно найти почти во всех современных смартфонах и во многих приложениях для роботов. Они могут помочь нам получить информацию, например, как быстро наше устройство движется и в каком направлении, или если оно поворачивается, то как быстро. Акселерометры определяют линейное ускорение устройств, то есть ускорение вдоль оси. С другой стороны, гироскопы работают с эффектом Кориолиса вместо ускорения и определяют угловую скорость, то есть скорость вращения тела. Однако здесь важно отметить, что гироскопы НЕ сообщают о текущем угле, они сообщают о скорости, с которой устройство поворачивается. Чтобы получить положение угла, вы должны интегрировать его с течением времени. На рисунке ниже показан тип движения, обнаруживаемый акселерометрами и гироскопами.
На рисунке ниже показан тип движения, обнаруживаемый акселерометрами и гироскопами.
Как акселерометры, так и гироскопы обычно находятся внутри блока инерциальных измерений или IMU. Это пакет, содержащий акселерометры, гироскопы, магнитометры, датчики температуры и т. д. На изображении ниже показана плата MPU6050, которая представляет собой IMU. Он имеет 3-осевой акселерометр, а также 3-осевой гироскоп внутри основной крошечной микросхемы, которую вы видите в середине платы. Теперь самое интересное, как эта технология реализована внутри чипа.
Все эти датчики реализованы на микроскопическом уровне с использованием технологии, обычно называемой MEMS или микроэлектромеханическая система, которая является замечательным нововведением в области машиностроения.
Микроэлектромеханические системы (МЭМС) объединяют механические и электрические компоненты в небольшие структуры размером всего несколько микрометров.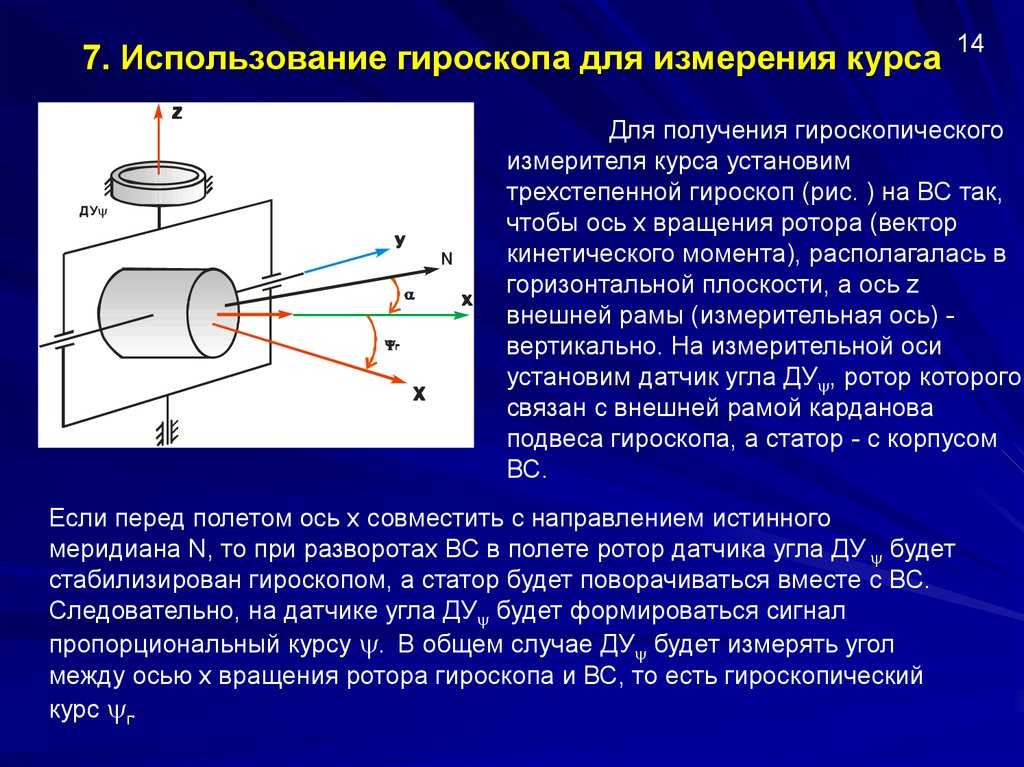 Они образованы комбинацией полупроводниковых технологий и технологий микрообработки с использованием микрообработки для интеграции всей электроники, датчиков и механических элементов на общую кремниевую подложку. По сути, МЭМС — это микроскопические механизмы, напечатанные непосредственно внутри ИС.
Они образованы комбинацией полупроводниковых технологий и технологий микрообработки с использованием микрообработки для интеграции всей электроники, датчиков и механических элементов на общую кремниевую подложку. По сути, МЭМС — это микроскопические механизмы, напечатанные непосредственно внутри ИС.
Внутренняя структура акселерометра MEMS
Если мы посмотрим на внутреннюю структуру акселерометра, она будет выглядеть примерно так:

Обнаружение движения
Наиболее распространенным методом измерения, используемым в акселерометрах и гироскопах, является емкостное измерение, в котором изменение емкости между неподвижными электродами и контрольной массой используется для определения ускорения тела. Этот метод широко используется благодаря преимуществам, которые он обеспечивает, таким как высокая точность, стабильность, помехозащищенность, низкое рассеивание мощности и его простая структура.
Чтобы лучше понять концепцию, давайте рассмотрим схему, состоящую из двух неподвижных и одной подвижной металлической пластины. Вместе они образуют дифференциальный конденсатор. В этом дифференциальном конденсаторе мы измеряем разницу в зарядах, которые образуются в нижнем конденсаторе (нижняя и средняя пластины) и верхнем конденсаторе (средняя и верхняя пластины). Если мы приложим одинаковую разность потенциалов к обоим конденсаторам, удерживая среднюю пластину точно между верхней и нижней пластинами, они будут иметь одинаковое наращивание емкости. Теперь, если мы переместим среднюю пластину ближе к нижней пластине, емкость нижнего конденсатора увеличится, а верхнего уменьшится.
Теперь, если мы переместим среднюю пластину ближе к нижней пластине, емкость нижнего конденсатора увеличится, а верхнего уменьшится.
Именно так работают акселерометры. Если мы внимательно посмотрим на структуру на рис. 5, то заметим, что сцепленные пальцы неподвижных электродов и контрольной массы образуют дифференциальный конденсатор, который вместе хранит заряд. Когда акселерометр перемещается вперед и назад, заряд, хранящийся между пальцами, изменяется, вызывая поток тока. Эти изменения емкостей используются для обнаружения движения.
Мы знаем, что емкость обратно пропорциональна расстоянию между пластинами или электродами, т. е.
Где,
- C = емкость
- 𝜖 = диэлектрическая проницаемость диэлектрического материала
- A = площадь пластин
- d = расстояние между пластинами
Мы получаем,
Затем изменение емкости записывается и проходит через усиление заряда, преобразование сигнала, фильтрацию нижних частот, прежде чем оно будет преобразовано в цифровой сигнал с использованием АЦП. Затем цифровой битовый поток от АЦП передается на хост с использованием протоколов связи, таких как I2C или SPI. В результате акселерометр выдает вам кучу чисел, и для их понимания требуется совсем немного математики, которую выполняет наш микроконтроллер!
Затем цифровой битовый поток от АЦП передается на хост с использованием протоколов связи, таких как I2C или SPI. В результате акселерометр выдает вам кучу чисел, и для их понимания требуется совсем немного математики, которую выполняет наш микроконтроллер!
Иногда движение очень сложно обнаружить с помощью одного дифференциального конденсатора. Следовательно, это делает необходимым использование нескольких подвижных и неподвижных электродов, соединенных параллельно. Это позволяет системе стать более точной и чувствительной к изменениям. Но массивная параллельная конфигурация позволила бы нам ощущать движение только в одном направлении. Чтобы преодолеть эту проблему и обнаружить движение в нескольких направлениях, нам просто нужно установить акселерометр по-другому (на 90 градусов), и теперь мы можем обнаружить ускорение в двух направлениях. Точно так же мы можем расширить его до 3-х осей и сделать акселерометр, который охватывает все направления движения в нашем трехмерном мире!
Изготовление этих сложных микроскопических структур является достижением инженерной мысли, поскольку позволяет размещать датчики, которые раньше занимали много места, теперь в очень маленьких пространствах. Эти микромашины теперь существуют в наших карманах! Ранее использовавшиеся только в промышленных роботах и автомобилях, эти датчики MEMS теперь являются частью каждого смартфона, потому что они дают нам новый способ взаимодействия с помощью движений и жестов. Устройства MEMS также позволяют нам создавать новые устройства, которые коренным образом меняют то, как наши движения, телодвижения и жесты влияют на то, как мы живем.
Эти микромашины теперь существуют в наших карманах! Ранее использовавшиеся только в промышленных роботах и автомобилях, эти датчики MEMS теперь являются частью каждого смартфона, потому что они дают нам новый способ взаимодействия с помощью движений и жестов. Устройства MEMS также позволяют нам создавать новые устройства, которые коренным образом меняют то, как наши движения, телодвижения и жесты влияют на то, как мы живем.
- Сенсор (7)
- МЭМС
Датчики акселерометра и гироскопа: работа, считывание и применение
Скачать PDF
Abstract
Микроэлектромеханические системы (МЭМС) в бытовой электронике с каждым годом развиваются все быстрее, с растущим спросом со стороны мобильного рынка, который доминирует в росте этой новой технологии. МЭМС-датчики фактически становятся ключевыми элементами при разработке различных продуктов для потребительского и мобильного рынка, таких как игровые приставки, смартфоны и планшеты. MEMS предоставляет пользователю новый способ взаимодействия со своим интеллектуальным устройством. Эта статья представляет собой обзор МЭМС: принцип их работы, механизм обнаружения и множество потенциальных приложений.
MEMS предоставляет пользователю новый способ взаимодействия со своим интеллектуальным устройством. Эта статья представляет собой обзор МЭМС: принцип их работы, механизм обнаружения и множество потенциальных приложений.
Аналогичная версия этой статьи появилась в марте 2014 года в EDN .
Введение
Микроэлектромеханические системы (МЭМС) объединяют механические и электрические компоненты в небольшие структуры микрометрового масштаба. Они образованы комбинацией полупроводниковых технологий и технологий микрообработки с использованием микромашинной обработки для интеграции всей электроники, датчиков и механических элементов на общую кремниевую подложку. Основными компонентами любой МЭМС-системы являются механические элементы, чувствительный механизм и ASIC или микроконтроллер. В этой статье представлен обзор МЭМС-датчиков акселерометров и гироскопов. Мы обсуждаем принципы их работы, их чувствительный механизм, растущее разнообразие их применений и глубокое влияние, которое они уже оказывают на нашу повседневную жизнь.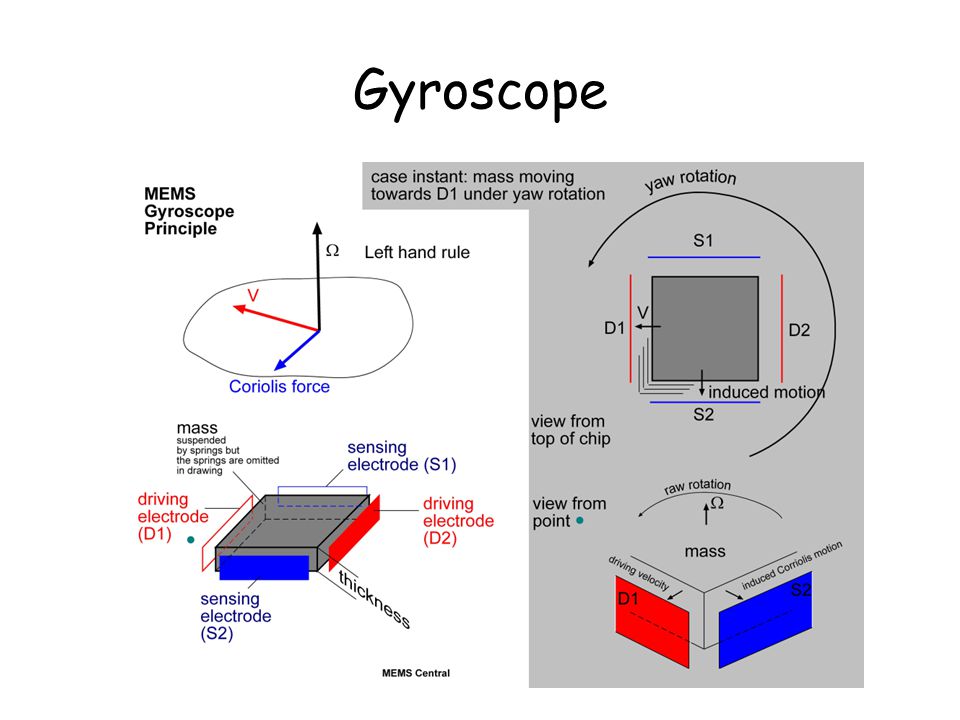
МЭМС в качестве инерциальных датчиков
МЭМС-датчикиимеют множество применений для измерения либо линейного ускорения вдоль одной или нескольких осей, либо углового движения вокруг одной или нескольких осей в качестве входных данных для управления системой (рис. 1).
Рис. 1. Угловое и линейное движение.
Все датчики акселерометра MEMS обычно измеряют смещение массы с помощью интерфейсной схемы измерения положения. Это измерение затем преобразуется в цифровой электрический сигнал через аналого-цифровой преобразователь (АЦП) для цифровой обработки. Однако гироскопы измеряют как смещение резонирующей массы, так и ее каркаса из-за ускорения Кориолиса.
Основные операции с акселерометром
Второй закон Ньютона гласит, что ускорение (м/с 2 ) тела прямо пропорционально и направлено в том же направлении, что и результирующая сила (Ньютона), действующая на тело, и обратно пропорционально его массе. (грамм).
Ускорение = Сила (Ньютон)
(м/с 2 ) Масса (грамм)
Важно отметить, что ускорение создает силу, которая улавливается механизмом определения силы акселерометра. Так что акселерометр действительно измеряет силу, а не ускорение; в основном он косвенно измеряет ускорение через силу, приложенную к одной из осей акселерометра.
Акселерометр также представляет собой электромеханическое устройство, включающее отверстия, полости, пружины и каналы, изготовленное с использованием технологии микрообработки. Акселерометры изготавливаются в процессе многослойной пластины, измеряя силы ускорения путем обнаружения смещения массы относительно неподвижных электродов.
Чувствительный механизм акселерометра
Обычным подходом к измерению, используемым в акселерометрах, является измерение емкости, при котором ускорение связано с изменением емкости движущейся массы (рис. 2). Этот метод измерения известен своей высокой точностью, стабильностью, низким рассеиванием мощности и простой конструкцией. Он не подвержен шуму и колебаниям температуры. Полоса пропускания для емкостного акселерометра составляет всего несколько сотен герц из-за их физической геометрии (пружина) и воздуха, заключенного внутри ИС, который действует как демпфер.
Он не подвержен шуму и колебаниям температуры. Полоса пропускания для емкостного акселерометра составляет всего несколько сотен герц из-за их физической геометрии (пружина) и воздуха, заключенного внутри ИС, который действует как демпфер.
C = (ε 0 × ε r × A)/D (Фарад)
ε 0 = допустимое свободное пространство
ε r = допустимый относительный материал между пластинами
A = площадь перекрытия между электродами
D = расстояние между электродами
Рис. 2. Движущаяся масса и емкость.
Емкость может быть либо односторонней, либо дифференциальной парой. Рассмотрим акселерометры, расположенные дифференциальной парой (рис. 3). Он состоит из одной подвижной массы (одна плоская поверхность), помещенной вместе с механической пружиной между двумя неподвижными эталонными кремниевыми подложками или электродами (другая плоская поверхность). Очевидно, что движение массы (Motion x) происходит относительно неподвижных электродов (d1 и d2) и вызывает изменение емкостей (C1 и C2). Вычислив разницу между C2 и C1, мы можем определить смещение нашей массы и ее направление.
Вычислив разницу между C2 и C1, мы можем определить смещение нашей массы и ее направление.
Рис. 3. Ускорение, связанное с одной движущейся массой.
Смещение подвижной массы (микрометра) вызвано ускорением и создает очень небольшое изменение емкости для правильного обнаружения (уравнение 1). Это требует использования нескольких подвижных и неподвижных электродов, соединенных параллельно. Конфигурация обеспечивает большее изменение емкости, которое может быть определено более точно, и, в конечном счете, делает измерение емкости более осуществимым методом.
Давайте быстро подведем итоги. Сила вызывает смещение массы, что, в свою очередь, вызывает изменение емкости. Теперь параллельное размещение нескольких электродов позволяет увеличить емкость, которую будет легче обнаружить (рис. 4). V1 и V2 являются электрическими соединениями с каждой стороны конденсаторов и образуют делитель напряжения с центральной точкой в качестве напряжения нашей массы.
Рис. 4. Ускорение, связанное с несколькими движущимися массами.
Аналоговое массовое напряжение будет проходить через усиление заряда, согласование сигнала, демодуляцию и фильтрацию нижних частот, прежде чем оно будет преобразовано в цифровую область с помощью сигма-дельта АЦП. Затем последовательный цифровой битовый поток от АЦП передается в буфер FIFO, который преобразует последовательный сигнал в параллельный поток данных. Затем этот параллельный поток данных может быть преобразован с использованием последовательного протокола, такого как I 2 C или SPI перед отправкой на хост для дальнейшей обработки (рис. 5).
Рис. 5. Электрическая схема акселерометра.
Сигма-дельта АЦП хорошо подходит для акселерометров из-за его узкой полосы пропускания сигнала и высокого разрешения. С выходным значением, определяемым количеством битов, сигма-дельта АЦП может быть очень легко преобразован в единицы «g» для приложения акселерометра. «g» — это единица ускорения, равная силе тяжести Земли на уровне моря:
«g» — это единица ускорения, равная силе тяжести Земли на уровне моря:
Например, если значение по оси X нашего 10-разрядного АЦП равно 600 из доступных 1023 (2 10 – 1 = 1023) и при опорном напряжении 3,3 В мы можем получить напряжение для ось X, указанная в «g» следующим уравнением:
X – напряжение = (600 × 3,3)/1023 = 1,94 В
Каждый акселерометр имеет уровень напряжения невесомости, то есть напряжение, соответствующее 0g. Сначала мы вычисляем сдвиги напряжения от напряжения невесомости (указанного в техническом паспорте и предполагаемого равным 1,65 В) следующим образом:
1,94 В – 1,65 В = 0,29 В
Теперь для окончательного преобразования делим 0,29В на чувствительность акселерометра (указана в техпаспорте и принята равной 0,475В/g):
0,29 В/0,475 В/г = 0,6 г
Многоосевой акселерометр
Давайте еще раз взглянем на наш рисунок 3 и добавим фактически изготовленный акселерометр (рисунок 6). Теперь мы можем четко связать каждый компонент акселерометра с его механической моделью.
Рис. 6. Механическая модель настоящего акселерометра.
Просто установив акселерометр по-другому (под углом 90 градусов, как показано на рис. 7), мы можем создать 2-осевой акселерометр, необходимый для более сложных приложений.
Рис. 7. Двухосевой акселерометр.
Есть два способа сконструировать двухосевой акселерометр: расположить два разных одноосных датчика акселерометра перпендикулярно друг другу или использовать единую массу с емкостными датчиками, расположенными для измерения движения по обеим осям.
Выбор акселерометра
При выборе акселерометра для конкретного приложения важно учитывать некоторые его ключевые характеристики:
- Полоса пропускания (Гц) : полоса пропускания датчика указывает диапазон частот вибрации, на который реагирует акселерометр, или как часто можно получать надежные показания. Люди не могут создавать движения тела за пределами диапазона от 10 Гц до 12 Гц.
 По этой причине полоса пропускания от 40 Гц до 60 Гц достаточна для обнаружения наклона или движения человека.
По этой причине полоса пропускания от 40 Гц до 60 Гц достаточна для обнаружения наклона или движения человека. - Чувствительность (мВ/g или LSB/g) : чувствительность является мерой минимального обнаруживаемого сигнала или изменения выходного электрического сигнала на изменение входного механического изменения. Это справедливо только для одной частоты.
- Плотность шума напряжения (мкг/SQRT Гц) : шум напряжения изменяется с обратным квадратным корнем ширины полосы. Чем быстрее мы считываем изменения акселерометра, тем хуже получаем точность. Шум сильнее влияет на работу акселерометров при работе в условиях более низких g с меньшим выходным сигналом.
- Напряжение невесомости : этот термин указывает диапазон напряжений, которые можно ожидать на выходе при ускорении в 0 g.
- Частотная характеристика (Гц) : это диапазон частот, указанный с диапазоном допустимых отклонений (±5% и т.
 д.), для которого датчик обнаружит движение и сообщит об истинном выходе. Допуск указанного диапазона позволяет пользователю рассчитать, насколько чувствительность устройства отклоняется от эталонной чувствительности на любой частоте в пределах заданного частотного диапазона.
д.), для которого датчик обнаружит движение и сообщит об истинном выходе. Допуск указанного диапазона позволяет пользователю рассчитать, насколько чувствительность устройства отклоняется от эталонной чувствительности на любой частоте в пределах заданного частотного диапазона. - Динамический диапазон (г) : это диапазон между наименьшей обнаруживаемой амплитудой, которую может измерить акселерометр, до наибольшей амплитуды до искажения или ограничения выходного сигнала.
Акселерометр и гироскоп
Прежде чем описывать некоторые приложения МЭМС, мы должны понять разницу между акселерометром и гироскопом. Акселерометры измеряют линейное ускорение (указывается в мВ/г) вдоль одной или нескольких осей. Гироскоп измеряет угловую скорость (задается в мВ/град/с). Если взять наш акселерометр и придать ему вращение (т. е. крен) (рис. 8), то расстояния d1 и d2 не изменятся. Следовательно, выходной сигнал акселерометра не будет реагировать на изменение угловой скорости.
Рис. 8. Невосприимчивость акселерометра к вращению.
Мы можем сконструировать датчик по-другому, так что внутренняя рама, содержащая резонирующую массу, соединена с подложкой пружинами под углом 90 градусов по отношению к резонирующему движению (рис. 9). Затем мы можем измерить ускорение Кориолиса с помощью измерения емкости на электродах, установленных между внутренней рамой и подложкой.
Рис. 9. Внутреннее представление и представление подложки относительно движущейся массы.
Приложения для акселерометра и гироскопа
Акселерометры уже давно используются в автомобилях для обнаружения автомобильных аварий и для срабатывания подушек безопасности в нужный момент. У них есть много приложений на мобильных устройствах, таких как переключение между портретным и ландшафтным режимами, жесты касания для перехода к следующей песне, постукивание по одежде, когда устройство находится в кармане, или захват анти-размытия и оптическая стабилизация изображения.
Внутренняя навигация
Ускорение это скорость изменения скорости
α = δv/δ t = δ 2 x/δt 2
Мы можем получить информацию о скорости и расстоянии из выходных данных ускорения путем одинарного или двойного интегрирования соответственно. Добавляя измерения, обеспечиваемые гироскопами, мы можем затем использовать специальную технику для отслеживания положения и ориентации объекта относительно известной начальной точки. Эта информация используется для навигации внутри помещений без внешнего опорного сигнала или сигнала GPS (Рисунок 10).
Рисунок 10. Акселерометр для внутренней навигации.
Оптическая стабилизация изображения
Человеческие руки дрожат с очень низкой частотой (от 10 Гц до 20 Гц). При съемке с помощью наших новейших компактных и легких смартфонов и камер мы вызываем дрожание, которое размывает изображение. Такие функции, как оптический зум, усугубляют эту проблему и вызывают еще большее размытие.
При использовании камеры SVGA с разрешением 800×600 пикселей и углом обзора 45 градусов следует учитывать датчик с горизонтальным дрейфом 0,08 градуса. 45/800 = 0,056 градуса, что соответствует размытию 1,42 пикселя. По мере улучшения разрешения камеры размытие охватывает больше пикселей и вызывает большее искажение изображения.
Рис. 11. Размытость изображения устраняется с помощью оптической стабилизации изображения.
Оптическая стабилизация изображения на основе гироскопа (рис. 11) с корректирующим программным обеспечением может компенсировать размытие изображения путем отправки данных измерений механического гироскопа на микроконтроллер и линейный двигатель для перемещения датчика изображения.
Управление на основе жестов
Мы можем использовать датчики MEMS-акселерометра для управления жестами беспроводной мыши, управления направлением в инвалидной коляске или гироскопа в Wii 9.0117 ® консоль. Другие примеры включают интеллектуальное устройство, использующее жесты для управления курсором на телевизоре, или «виртуальные» ручки, или даже команды жестов для управления внешними устройствами с помощью портативного беспроводного сенсорного блока.