
какой буквой обозначается, как найти, формула с примерами задач
Что такое путь в физике
ОпределениеПутем называется длина траектории, пройденной телом за определенный промежуток времени. Путь не является векторной величиной, хоть тело и движется в определенном направлении. Это величина скалярная и равняется модулю разницы координат тела в момент окончания и начала движения.
ПримечаниеОтличие пути от перемещения состоит именно в том, что перемещение — величина векторная. Оно имеет значение, которое равно длине вектора.
Источник: fizmat.by
В решении задач на нахождении пути используются специальные символы. Так, при одномерном перемещении часто используется обозначение Δx (дельта х). Знак Δ обозначает разницу конечной и начальной координат тела.
Кроме этого обозначения можно встретить буквы латинского алфавита: S, l, h. В отличие от S, значение которой всегда «расстояние» либо «длина пути», l и h могут обозначать длину и высоту.
В задачах часто сразу оговаривается, что тело движется в трехмерном пространстве. Тогда в обозначении его координат участвуют три координатные прямые: x, y, z. Соответственно, изменения его координат будут обозначаться Δx, Δy, Δz.
Перемещаясь в пространстве, тело (материальная точка) проходит определенные точки пространства. Эти точки можно соединить линией, получив траекторию. В жизни она бывает как видимой, ток и не заметной простым глазом. Например, за лыжником сзади тянется длинный след (траектория) от лыж. В то же время пролетевшая птица не оставляет заметной человеческому глазу траектории.
ПримечаниеТраекторию часто нельзя охарактеризовать однозначно. Ее форма определяется используемой системой отсчета. Например, движущееся колесо относительно планеты совершает винтовые движения, а относительно точки на земной поверхности — прямая линия.
Зная вид траектории, а также координаты начальной и конечной точки положения тела, легко определить пройденный путь. Однако всегда необходимо понимать, относительно чего он рассматривается. Если пассажир, находящийся в конце автобуса, проходя к переднему выходу, совершает путь, равный длине этого автобуса, то относительно системы отсчета — планета Земля — его путь будет состоять из двух расстояний: длины автобуса и длины траектории движения самого автобуса (относительно планеты).
Однако всегда необходимо понимать, относительно чего он рассматривается. Если пассажир, находящийся в конце автобуса, проходя к переднему выходу, совершает путь, равный длине этого автобуса, то относительно системы отсчета — планета Земля — его путь будет состоять из двух расстояний: длины автобуса и длины траектории движения самого автобуса (относительно планеты).
Формула нахождения пути
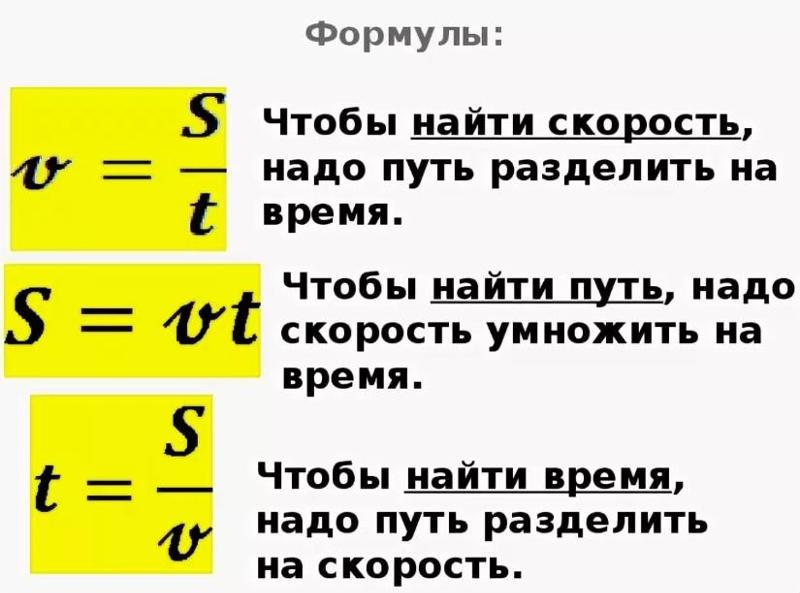
Чтобы выразить путь в принятых единицах измерения применяют физические формулы, которые также могут содержать различные показатели:
- Для кинематики характерной формулой при равномерном прямолинейном движении является выражение пути через скорость движения и время, за которое оно совершается: S=Vt, где V — скорость, t — время.
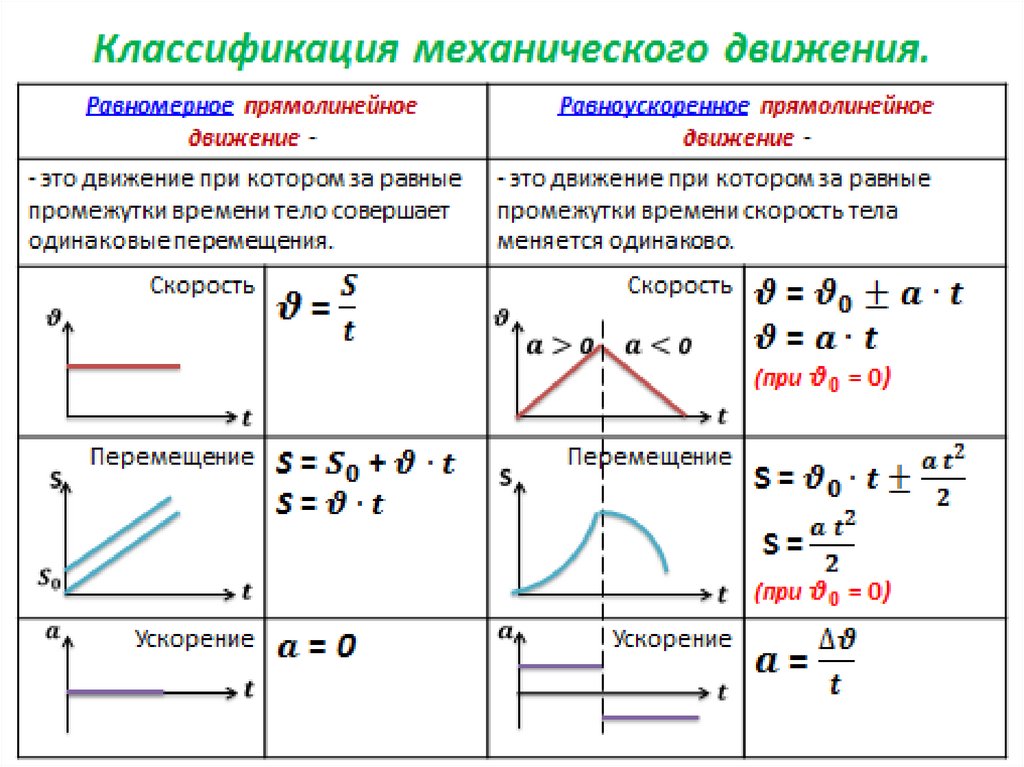
- Если совершается равноускоренное перемещение, то используются формулы:
Источник: formulki.ru
Обозначения V0 и V применяются для начальной и конечной скорости соответственно. При этом, если движение равноускоренное, то разница скоростей со знаком плюс, если равнозамедленное — то со знаком минус.
Графики зависимости пути от времени для разных типов движения
Кроме того, что можно вычислить значение пути, пройденного телом, с помощью специальных формул, его можно увидеть на графике. Физические задачи опираются на несколько графиков, характеристики которых продиктованы особенностями конкретного движения.
ПримерГрафик, который отражает равномерное движение материальной точки (тела):
Источник: repetitor.org.ua
Формулой, определяющей путь, отраженный на этом графике, является S=V*t.
Бывает, что подобные разновидности графиков отличаются друг от друга из-за того, что тело проходит разные отрезки пути с различной скоростью.
ПримерНапример, если на одном участке в течение часа оно преодолело 20 км, далее в течение двух часов — не двигалось, а затем четыре часа преодолевало еще 20 км, график не будет выглядеть в виде прямой линии. Он будет иметь следующий вид:
Источник: repetitor.org.ua
На одном рисунке может быть отражено два и больше графиков движения тел:
Источник: repetitor. org.ua
org.ua
Чем быстрее движется тело, тем больший угол образуют прямые оси времени и графика движения.
Схематические характеристики движения могут выражаться и в графиках, отражающих скорость. В таком случае в прямоугольной системе координат по горизонтали откладывают время, а по вертикали — модуль скорости.
Источник: repetitor.org.ua
Анализ графика показывает, что, согласно выбранным единицам измерения, первое тело двигалось со скоростью 25 м/с, второе — 10 м/с.
Примеры задач
3 Задача 1
ЗадачаОт выбранной точки отсчета отъехал человек на велосипеде. Его начальная скорость составляла 20 км/ч. Спустя 4 часа из этой же точки выехала машина. Ее скорость была 60 км/ч. Произвести расчет и изобразить графически, через сколько часов машина догонит велосипедиста.
Графики движений велосипедиста и машины выглядят так:
Источник: repetitor.org.ua
Из рисунка следует, что время, когда состоится встреча велосипедиста и машины-6 часов с момента выезда велосипеда.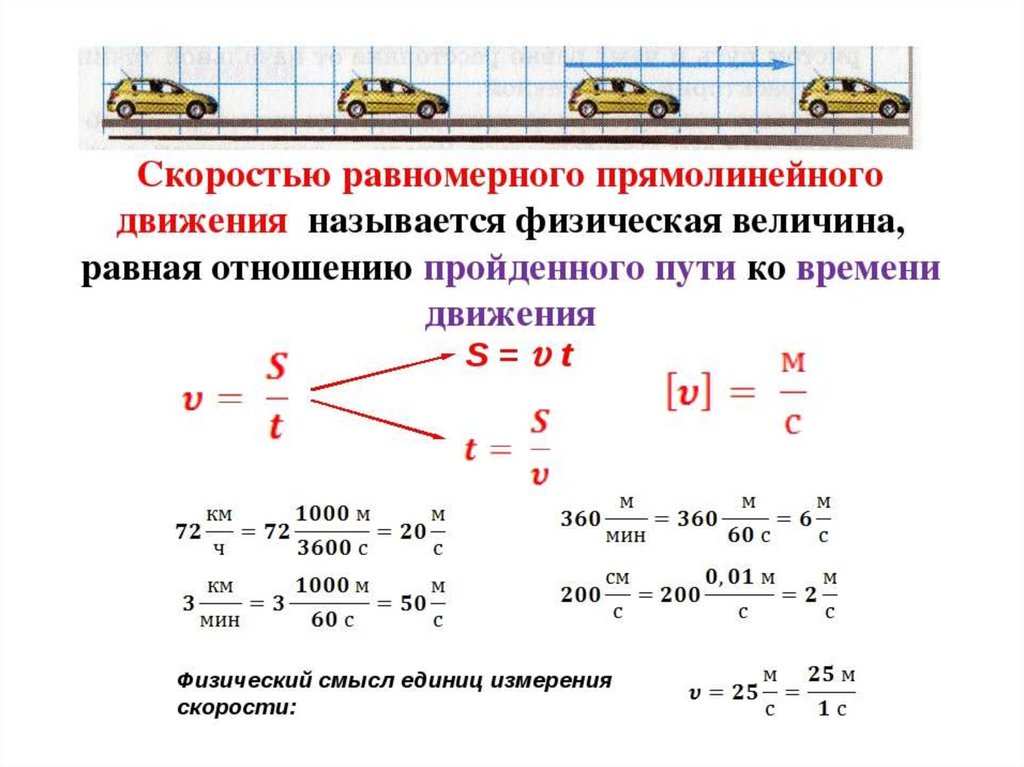 Это произойдет по истечении 2х часов с момента выезда машины.
Это произойдет по истечении 2х часов с момента выезда машины.
Из двух разных поселков выехали навстречу один другому мотоциклисты: первый со скоростью 10 км/ч, второй — 12 км/ч. Их встреча произошла через 2 часа. Необходимо высчитать расстояние между поселками.
Краткий путь решения следующий:
- Определяем скорость сближения мотоциклистов: 10+12=22 км/ч.
- Для определения расстояния между поселками производим умножение скорости сближения и времени: 22*2=44 (км).
Схематически решение задачи выглядит так:
Источник: spacemath.xyz
ЗадачаРасстояние между городами 60 км. Из них в одно время выехали друг навстречу другу велосипедисты: первый со скоростью 14 км/ч, второй — 16 км/ч. Сколько нужно часов, чтобы они встретились?
Решение
Суммируем скорости их движения, находя скорость сближения:
14+16=30 км/ч
Следовательно, каждый час расстояние между велосипедистами сокращается на 30 км.
Зная, что расстояние между городами 60 км, легко высчитать время встречи: 60:30=2 (ч).
Схема задачи следующая:
Источник: spacemath.xyz
ЗадачаТри машины с промежутком в один час выехали из города A в город B. Первая имела скорость 50 км/ч, вторая — на 10 км/ч больше. Какова скорость третьей машины, если указывается, что она смогла поравняться с первыми двумя.
Решение
Введем дополнительные обозначения:
- Точка A — город, из которого машины отправились — точка отправления.
- Точка B — город, в который машины направлялись — точка назначения.
- Точка C — точка, в которой произошла встреча всех трех машин.
Если первая машина доехала до точки C за время t (ч), то вторая — за t-1 (ч). Для третьей машины справедливо выражение времени t-2 (ч).
Определяем скорость второй машины: 50+10=60 (км/ч).
Поскольку пройденные всеми тремя машинами расстояния одинаковые, приравняем выражения:
Из данного равенства находим, что v=75 км/ч.
Возможна ли новая модель физики? / Хабр
В жизни нет ничего сложного.
Это мы сложны. Жизнь – простая штука, и в ней что проще, тем правильнее.
Письма. Оскар Уайльд
Элементарные понятия в физике возникли преимущественно на бытовом опыте человека.
Всё что нам известно, как мы считаем, о нашей Вселенной основано на тех определениях, которые мы дали первичным понятиям (пространство, время, масса), а также на полученных математических формулах связывающих параметры наблюдаемых процессов.
Формулы создаются на основе первичных понятий. Например, мы принимаем что скорость это отношение пройденного пути к затраченному на прохождение этого пути времени.
Первичными здесь являются понятие «пространство» и понятие «время».
Вычисляя параметры движения материальных объектов, мы вводим понятие «масса», на основе чего получаем понятие «импульс» и кинетическая «энергия».
Обнаружив, что скорость не всегда проявляет себя как аддитивная величина, мы пытаемся придать какие-то свойства пространству и времени, сконструировав из них пространство-время.
Получая экспериментальные и наблюдательные подтверждения для новых формул, мы делаем вывод о том, что они описывают реальный мир.
При этом мы так и не можем определить пространство, время или пространство-время, поскольку для их определения требуются более простые или более общие понятия, которых у нас нет.
Переходя к электромагнетизму, нам приходится вводить новые понятия (сущности), такие, как «электрический заряд» и «электромагнитное поле».
Затем мы обнаруживаем, что связать воедино весьма точно объясняющие данные наблюдений теорию гравитации и теорию электромагнетизма мы не можем.
Более того, возникают «странные» ограничения на существование магнитного заряда, например. На основании большого числа опытных данных мы постулируем отсутствие магнитных зарядов, но так и не можем понять, почему же их нет.
Отсутствие определений для первичных понятий позволяет строить различные концепции типа цифровой вселенной, когда вся весь мир помещается в некоторую вычислительную машину. Но и в этом случае остаются вопросы к устройству и размещению этой машины в каком-то не наблюдаемом нами мире.
Но и в этом случае остаются вопросы к устройству и размещению этой машины в каком-то не наблюдаемом нами мире.
По мнению автора следует проанализировать имеющиеся первичные понятия, и попытаться создать другую систему первичных параметров, в которой пространство, время, масса, заряд могли бы получить строгие определения.
Истоки существующих первичных понятий
Все первичные понятия были приняты на основе бытового опыта. Пространство и время были и остаются не столько физическими, сколько философскими понятиями.
Мы подвержены своим привычкам, житейскому опыту, традициям, мнению авторитетов. Например, мы используем понятие «время», а из литературы и из уст окружающих слышим, что оно течёт. Мы представляем время как нечто, существующее само по себе. Но стоит углубиться в размышления, да почитать «Исповедь» Фомы Аквинского, сущность этого понятия ускользает от нашего сознания. Всему виной традиция и житейский опыт.
Материалистическое понимание окружающего мира требует наличия возможности экспериментально доказать выводы теорий.
Но что такое экспериментальное доказательство? Ломоносов когда-то экспериментально показал волновую сущность света, разложив его на семь составляющих. Впоследствии оказалось, что семь цветов не являются отражением сути волнового процесса. Цвета это только отклик нашей нервной системы на электромагнитное излучение оптического диапазона, где есть только распределение излучения различных частот. Оказалось, что физически, объективно цвета не существуют. Воображаемый характер цвета удалось подтвердить, создав приборы, которые могли фиксировать физические параметры оптического излучения. Это не помешало создать очень полезные на практике цветовые пространства, создать формулы для работы с цветом. То есть мы получили теорию, которая работает с воображаемыми величинами не существующими вне нашего сознания, цветами.
А что можно сказать о времени и пространстве с точки зрения восприятия их человеком и физическими приборами?
Человек воспринимает время как нечто, что может менять свою скорость. Это давно замечено на примере критических для человека ситуаций, когда по мнению человека все наблюдаемые им процессы замедляются. Это позволяет человеку избежать гибели, успев предпринять какие-то меры для своего спасения.
Это давно замечено на примере критических для человека ситуаций, когда по мнению человека все наблюдаемые им процессы замедляются. Это позволяет человеку избежать гибели, успев предпринять какие-то меры для своего спасения.
С возрастом человеку начинает казаться, что дни становятся короче.
Измеряют ли время инструментальные средства?
Нет. Инструментальные средства позволяют лишь сравнить ход двух процессов путём подсчёта числа периодов этих процессов между началом и окончанием измерения.
Посредством современных атомных часов удалось подтвердить вывод теории относительности о замедлении темпа процессов в поле тяготения и при увеличении скорости объекта. Человек продолжает интерпретировать результаты измерений как замедление времени. Но это только сравнение числа периодов двух процессов. Время измерить невозможно.
Понятие о пространстве человек получил из практики оценки и измерения расстояний. В этом случае мы тоже не измеряем пространство, а сравниваем расстояния между объектами (материальными точками).
Из практики измерений можно получить понятия продолжительности и протяжённости. Но это не понятия о времени и пространстве, хотя и продолжительность и протяжённость требуют своего определения.
Понятие о массе возникло на основе опыта и понятия о весе. До появления весов человек мог непосредственно ощутить вес небольших объектов или оценить их вес по косвенным параметрам. С появлением весов вес определяется как сила притяжения объекта к земле.
Массу объекта обычно можно только вычислить.
С некоторых пор астрофизики стали применять понятие «гравитационный параметр», величину которого удаётся определить значительно точнее, чем массу небесных объектов.
Понятие об электрическом заряде меньше связано с бытовым опытом человека. Это понятие в современной физике связано со свойствами элементарных частиц, с существованием элементарного заряда.
Но, как и в случае с другими первичными понятиями, нет понимания сути понятия «заряд». Определение заряда строится на основе наблюдаемых явлений связанных с его существованием.
Что имеем
Имеем не имеющие строгого определения, содержащего указание на понятие более общего класса и особенностей рассматриваемых понятий, термины:
1. Пространство;
2. Время;
3. Продолжительность;
4. Протяжённость;
5. Масса;
6. Заряд;
7. Электромагнитное поле;
8. Гравитационное поле;
9. Гравитационная постоянная.
Вообще говоря, этот перечень может быть продолжен. Но для целей этого изложения достаточно уже перечисленных терминов.
В отличие от представлений физики 19-го века современная физика допускает существование каких-то объектов и явлений, которые непосредственно инструментально зафиксировать невозможно. Макс Планк ввёл представление о нейтрино, когда непосредственно его обнаружить было нельзя. Вся общая теория относительности началась с теории, которая постепенно находила подтверждения в практике. Но и сейчас измерить кривизну пространства непосредственно невозможно.
Электростатическое и магнитостатическое поля определяются по косвенным признакам.
Но можно ли уверенно говорить о том, что наличие косвенного признака уверенно подтверждает наличие первичного понятия?
Свойства для первичных понятий не столько объективно определяются, сколько приписываются человеком с учётом его опыта восприятия косвенных признаков, интерпретируемым им как наличие этих свойств.
Отклонение стрелки амперметра интерпретируется как наличие в цепи, куда включён амперметр, электрического тока. Но современная физика имеет не одно определение для электрического тока, если учесть наличие токов смещения.
Обычный человеческий опыт подводит при попытках понять суть процессов не имеющих места в обычной жизни. К этому давно пришли физики изучающие квантовую механику. Подавляющее число параметров в квантовом мире не имеют аналогов в макромире.
Создание другого набора первичных понятий может быть полезным, если перечень первичных понятий станет короче, а на основе этих первичных понятий можно будет объяснять явления из не смежных областей физики, например явления гравитации и электромагнетизма.
Определения применяемых в физике понятий должны стать корректными, чтобы не возникало логических петель при определении протяжённости и метрического пространства, например.
Предлагаемый вариант решения этой задачи может быть следующим. Протяжённость и продолжительность должны определяться на основе новых первичных понятий. Понятие массы должно стать производным. Масса это некоторое свойство материальных объектов определяемое из первичных понятий.
Число первичных понятий не должно превышать, а лучше если оно станет меньше, чем число существующих первичных понятий. Принцип бритвы Оккама требует не добавлять сущностей без необходимости. Но в нашем случае мы не только не предполагаем их добавлять, а напротив уменьшаем. С точки зрения этого принципа новая система должна быть совершеннее старой, поскольку в ней меньше число независимых сущностей.
Создание нового перечня первичных понятий вызовет необходимость создания новой системы единиц измерения физических величин.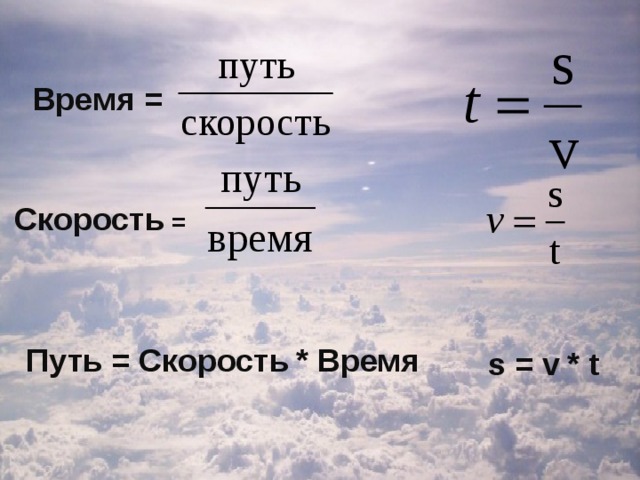 Но должен существовать однозначный перевод новых единиц в традиционные.
Но должен существовать однозначный перевод новых единиц в традиционные.
Среда Вселенной
Как бы не хотелось, но не признать существование среды невозможно. Даже пустота должна быть определена как среда с особыми свойствами.
Но проблема всех попыток создания среды вселенной состоит в том, что эта среда помещалась в некоторое пространство и время, становясь дополнительным понятием, без которого можно было обойтись. Бритва Оккама безжалостно отрезала любую среду, и прижилась только пустота, для которой нет определённых свойств, или они равны нулю.
Новый подход имеет кардинальное отличие от всех предшествующих.
Предлагается поместить среду вселенной вне пространства и времени. Как это возможно?
Это возможно, если в качестве основы для среды выбрать совершенно отвлечённое от пространства и времени понятие. Этому понятию дано отдельное название, Медиосо (эсперанто, Среда содержащая всё). Применение этого термина крайне упрощает определение понятий в дальнейшем.
Каким образом можно представит среду, которая находится вне метрического пространства? На бытовом уровне это представит сложно. Так же сложно, как в квантовой физике сложно представить себе нахождение частицы сразу в большом объёме (уравнение Шредингера).
Но с формальной точки зрения для этого достаточно принять как принцип, что существует некоторый набор первичных потенциалов. Здесь понятие «потенциал» несколько отличается от его классического определения, но оно хорошо описывает качества и свойства среды Медиосо.
Назначим среде Медиосо свойства. Она состоит из пяти фракций. По сути эти фракции ответственны за все виды взаимодействий в метрическом мире. Но мир среды Медиосо не метрический. Лишь одна из фракций определяет восприятие человеком метрического пространства.
Перечислим фракции и дадим их предварительное описание.
1. Космологическая фракция.
2. Метрическая фракция.
3. Кинетическая фракция.
4. Гравитационная фракция.
5. Электрическая фракция.
Электрическая фракция.
Невозможно указать какие-либо количественные характеристики этих фракций. Но фракциям можно приписать значение их потенциалов. В отличие от классического потенциала эти потенциалы определены на интервале значений 0 – 0,5 и не содержат неопределённых постоянных. В этой системе потенциалы получаются не интегрированием, а непосредственно вводятся как первичные понятия.
1. Космологический потенциал χ.
2. Метрический потенциал Ψ.
3. Кинетический потенциал K.
4. Гравитационный потенциал Φ.
5. Электрический потенциал U.
Теперь уже можно говорить о некоторых отношениях в среде Медиосо
.
Сумма метрического, кинетического, гравитационного и электрического потенциала равна космологическому потенциалу.
Космологический потенциал необходим для создания моделей вселенных отличающихся от нашей. Для нашей Вселенной примем, что величина этого потенциала всегда постоянна и равна значению половины скорости света.
Скорость в модели Медиосо является одной из основных единиц.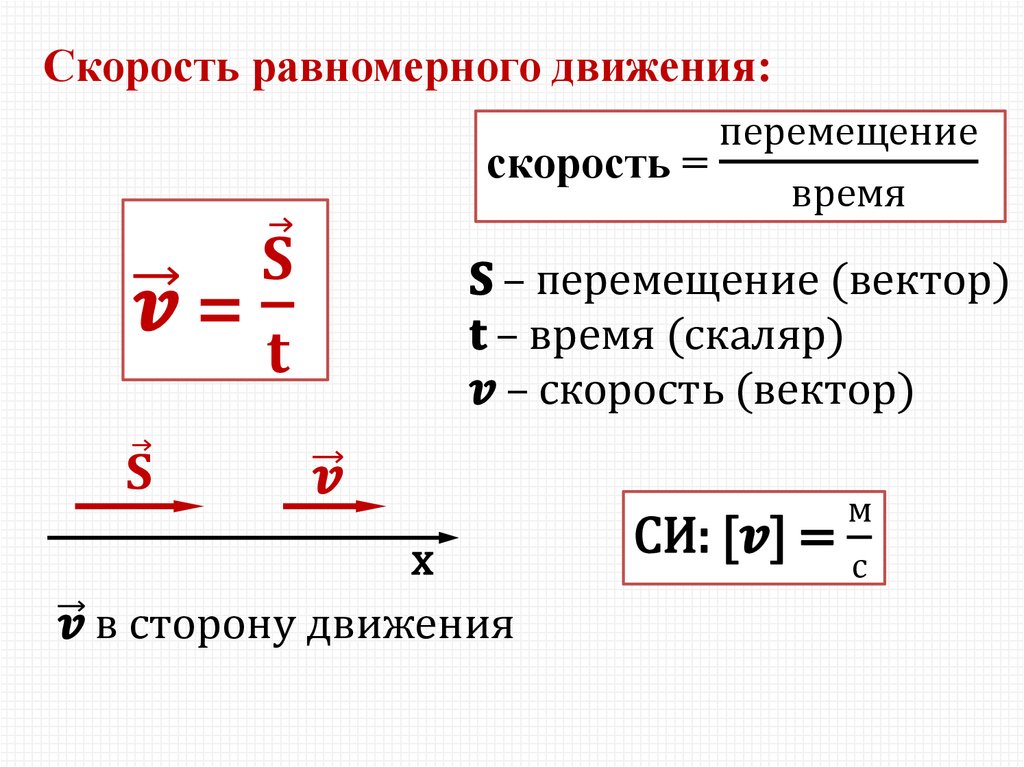 Для упрощения вычислений можно принять, что квадрат скорости света в нашей Вселенной равен единице. Эталоном скорости может служить реальная скорость распространения взаимодействий при отсутствии каких-либо возмущений .
Для упрощения вычислений можно принять, что квадрат скорости света в нашей Вселенной равен единице. Эталоном скорости может служить реальная скорость распространения взаимодействий при отсутствии каких-либо возмущений .
Это соотношение действительно в малой области потенциального пространства Медиосо, полностью описываемого 4-сферой, как части 5-шара, в котором сферы могут быть построены для разных значений космологического потенциала .
Этот угол мал даже на масштабах видимой вселенной, а его влияние на характер физических законов может быть заметен только на космологических масштабах и лишь теоретически.
Рис. 1. Каждый вектор направлен в точку сферы абсолютного покояНа сфере, как и на окружности, между радиусами может быть определён угол. Угол не относится непосредственно к метрическому пространству. В данном случае угол между векторами это всего лишь аргумент некоторой функции.
На рисунке Рис. 1. хорда соединяющая объекты A и B это “траектория” движения в потенциальном пространстве соответствующая наименьшему действию для перемещения между точками A и B.
Одна из двумерных поверхностей 4-сферы соответствует состоянию объектов когда метрический потенциал равен единице. Это значит, что все остальные потенциалы равны нулю. Эту поверхность можно назвать поверхностью полного покоя.
Каждая точка этой поверхности относится к неподвижному объекту. Одинаковые неподвижные объекты отличаются друг от друга только расстоянием между ними. В нашей сфере это угол между положениями объектов на сфере. Переходя к метрическому пространству, можно сказать, что метрическое расстояние в нашем восприятии связано с угловым расстоянием на поверхности полного покоя в модели.
Максимально возможный угол между объектами в модели соответствует 2π. Это угол соответствует максимально возможному метрическому расстоянию. Правда, такие расстояния можно рассматривать лишь рассматривая вопросы космологии. Связь между углом и линейным интервалом между объектами в общем случае сложна, учитывая многомерность и нелинейность модели.
Но в наблюдаемой вселенной углы между векторами реальных объектов в пространстве Медиосо малы. Малость углов позволяет применить для связи между потенциалами формулу .
Малость углов позволяет применить для связи между потенциалами формулу .
Рассмотрим всего два потенциала, которые можно связать соотношением (помним, что χ в наблюдаемой вселенной всегда равен 0,5C и максимальное значение любого потенциала не может превышать значения 0,5C).
Формулу можно переписать следующим образом .
Кинетический потенциал это половина квадрата скорости объекта .
Метрический потенциал оказался тем самым релятивистским фактором из СТО, влияющим на размеры движущихся объектов, а также на замедление процессов в них.
Учитывая, что в модели все потенциалы равноправны, можно предсказывать, что изменение размеров объектов с увеличением любого потенциала будет происходить подобно тому, как это происходит при возрастании кинетического потенциала.
Рассматривая метрическое пространство, потенциалы фракций можно рассматривать как линейную плотность этих фракций.
О массе и других величинах
Уже известный в небесной механике гравитационный параметр определяется из орбитальных параметров.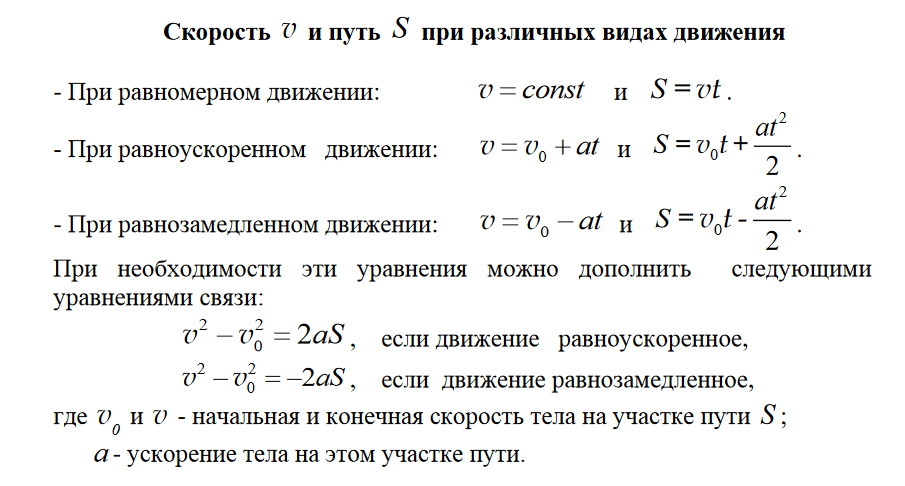
При этом гравитационный параметр заменяет в формулах массу, при условии, что не требуется применение гравитационной постоянной.
Не привлекая сложных формул можно указать, что пробный малый объект на круговой орбите вокруг более массивного объекта имеет скорость .
Здесь μ это гравитационный параметр, R радиус орбиты.
Мы уже упомянули о том, что в модели Медиосо скорость относится к основным единицам. Метрическое расстояние можно считать второй основной единицей измерения (протяжённость). Тогда гравитационный параметр это производная единица. Далее будем называть гравитационный параметр сокращённо – грап.
Если считать основными единицами измерения скорость V и длину L, то размерность грапа определяется как V2L. Для всех единиц измерения в механике и гравитации теперь достаточно двух основных единиц. Единица массы заменяется на производную единицу грап. Гравитационная постоянная принимается безразмерной и равной единице.
За эталон скорости принимаем скорость света, а эталон длины выбираем произвольно, но чтобы легче ориентироваться в величинах примем в качестве эталона длины метр.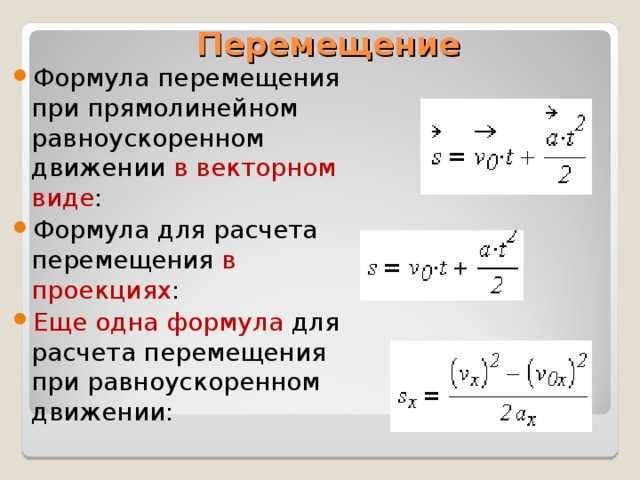
Для наглядности отображения размерности примем обозначение в виде [v l], где v это степень для единицы скорости, а l степень для единицы длины.
Обозначим некоторые размерности величин, указывая также формулу для перевода численных значений величин из системы единиц Медиосо (SM) в единицы международной системы SI:
Скорость V [1 0],
Длина L [0 1],
Грап μ [2 1],
Продолжительность T [-1 1],
Ускорение A [2 -1],
Сила F [4 0],
Импульс P [3 1],
Энергия W [4 1],
Скорость
В модели медиосо есть поверхность абсолютного покоя. Если предполагается абсолютный покой, то и скорость должна быть в общем случае абсолютной. Только малые скорости можно рассматривать условно относительными, поскольку значение релятивистского фактора почти неотличимо от единицы.
Кроме обычной скорости в рассматриваемой модели рассматривается понятие собственной скорости. Для космического корабля это скорость определяемая по показаниям интегрирующего акселерометра включённого при старте корабля (при отсутствии тяготения). При наличии тяготения необходим учёт показаний дифференциального гравиметра с базой сравнимой с длиной корабля.
При наличии тяготения необходим учёт показаний дифференциального гравиметра с базой сравнимой с длиной корабля.
Собственная скорость V_p связана с наблюдаемой соотношением
.
Значение собственной скорости ничем не ограничено. Собственная скорость зависит и от гравитационного потенциала. При этом свет вблизи гравитирующих объектов обладает собственной скоростью превышающей константу С:
.
Представления о собственной скорости позволяют простым способом получить формулы для определения аномального смещения перигелия Меркурия и для угла огибания светом массивных объектов.
Для перигелия Меркурия
Полученное значение отличается от значения пол формуле Эйнштейна всего на 0,39%.
Для угла отклонения луча света в поле тяготения формула точно повторяет формулу Эйнштейна
В области взаимодействия объектов интересно выглядит закон тяготения
Здесь присутствуют объёмы занимаемые объектами, их плотность, плотность материи в окружающем пространстве (может быть тёмная материя), а также электрические заряды этих объектов. Формула показывает взаимное ускорение взаимодействующих объектов. Сила в модели Медиосо может быть только контактной (почти как в ОТО). Для учёта знаков зарядов применена функция Signum.
Формула показывает взаимное ускорение взаимодействующих объектов. Сила в модели Медиосо может быть только контактной (почти как в ОТО). Для учёта знаков зарядов применена функция Signum.
Наличие некоторой плотности материи в метрическом пространстве приводит к тому, что взаимное ускорение может стать отрицательным, объекты начнут отталкиваться. Это похоже на поведение объектов малой плотности в воде.
Электрическая фракция
Мы рассмотрели потенциалы метрической, кинетической и гравитационной фракции. Электрическая фракция отличается от рассмотренных тем, что имеет две составляющих.
Эти составляющие взаимосвязаны симметричным образом. Если в одной составляющей электрической фракции наблюдается движение градиента электрического потенциала, то в другой возникает напряжённость кручения. В области механики аналогов такого поведения среды Медиосо нет.
Но в области электродинамики такое представление позволяет однозначно утверждать, что магнитных монополей быть не может, а также получить простым путём уравнения электродинамики.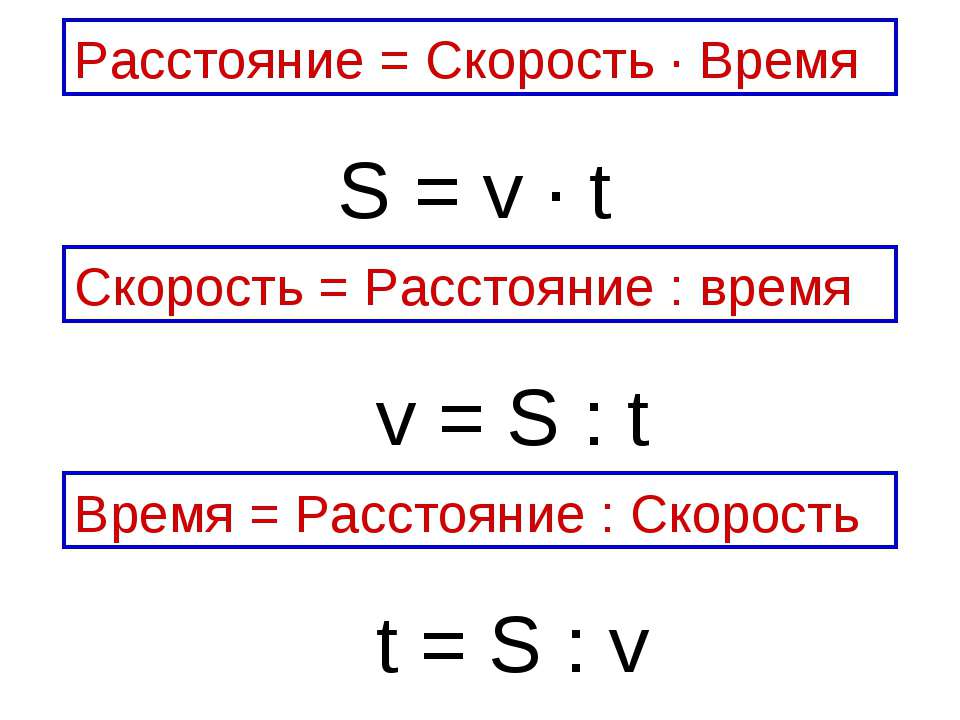
Уравнения связывают линейное движение градиентов в одной части электрической фракции с возникающем в связи с этим кручением в другой её части.
В модели Медиосо нет места индукциям. Есть только напряжённости (градиенты потенциалов), а для учёта свойств среды применяются проницаемости.
Размерность электрического заряда имеет отличие от размерности грапа дополнительным символом единицы [2 1 1], показывающей принадлежность единицы измерения к электричеству. Аналогично эта единица возникает и в размерностях других электрических величин.
Электрический ток в этом представлении имеет размерность [3 0 1].
«Магнитный ток» I_B это ток градиента кручения электрической фракции. В формулах выше показана плотность этого тока J_B.
Напряжённости имеют размерность [2 -1 1]. Электрическое напряжение имеет размерность электрического потенциала с дополнительной «зарядовой» единицей [2 0 1].
Электрическое сопротивление имеет размерность [-1 0], электрическая ёмкость [0 1], электрическая индуктивность [-2 1].
Электрическая и магнитная постоянная в модели Меддиосо просто отсутствуют (или безразмерны и равны единице).
Элементарный электрический заряд, как и в других моделях связан с постоянной планка и постоянной тонкой структуры
.
Значение постоянной Планка в системе единиц SM h= 1,641344122441E-69 [3 2 2].
Значение постоянной тонкой структуры не зависит от выбора единиц и α=4,894377743697E-36 [0 0 0].
Скорость света C в системе единиц SM равна единице.
Значение элементарного заряда в SM e=4,894377743697E-36 [2 1 1].
Размерности в SM запоминаются легко. Поэтому размерность можно использовать вместо названия единицы.
Результат применения модели
Вместо показанного ранее перечня сложно определяемых понятий состоящий из девяти пунктов:
1. Пространство;
2. Время;
3. Продолжительность;
4. Протяжённость;
5. Масса;
6. Заряд;
7. Электромагнитное поле;
8. Гравитационное поле;
9. Гравитационная постоянная.
Гравитационная постоянная.
Получен перечень состоящий из шести пунктов:
1. Среда Медиосо
2. Космологическая фракция.
3. Метрическая фракция.
4. Кинетическая фракция.
5. Гравитационная фракция.
6. Электрическая фракция.
Метрическое пространство определяется через параметр среды Медиосо.
Понятие «время» исключено.
Понятие «масса» заменено уже существующим понятием гравитационного параметра.
Гравитационный параметр и электрический заряд рассматриваются как концентрация гравитационной и электрической фракции.
Гравитационное поле и электромагнитное поле определяются через градиенты потенциалов гравитационной и электрической фракции.
Исключена необходимость в гравитационной постоянной (второй закон Ньютона и закон всемирного тяготения не содержат постоянных).
Кроме того для объяснения гравитации не требуется применение тензорного исчисления. Гравитация и электромагнетизм объясняются на общей базе понятий.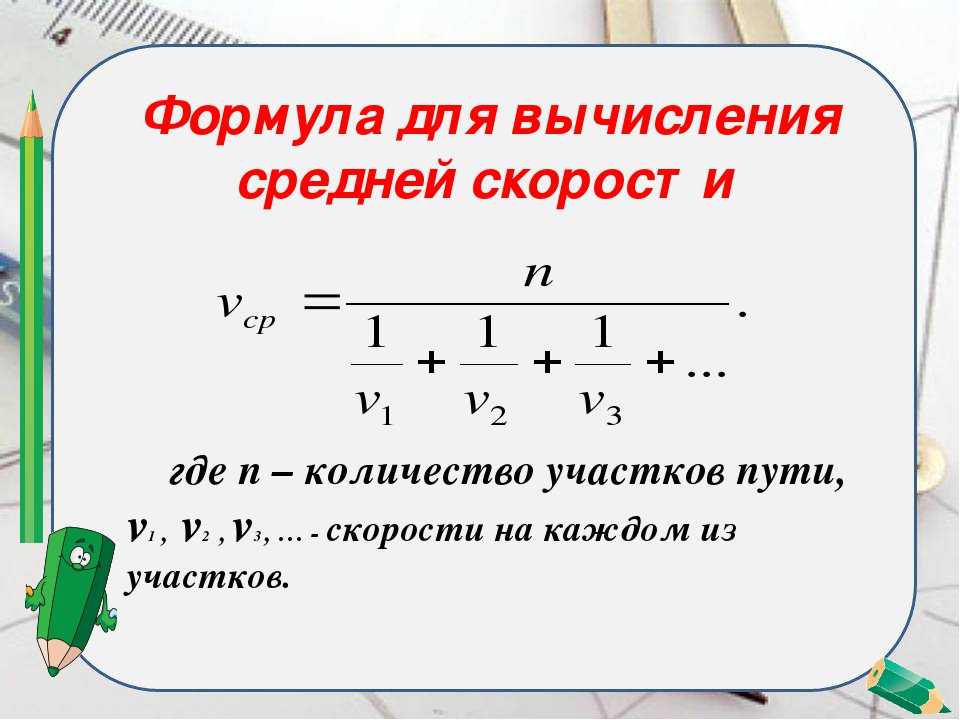
При рассмотрении «чёрных дыр» в рамках модели оказывается, что приближение к сфере Шварцшильда принципиально невозможно. Изменение величины метрического потенциала приводит к видимому расширению окружающего метрического пространства для космонавта. Если наблюдатель может, как и при классическом рассмотрении, обнаружить «замирание» космонавта, то сам космонавт при попытке приближения к сфере Шварцшильда обнаружит, что для него расстояние до этой области постоянно увеличивается. Наблюдатель кроме «замирания» путешественника должен обнаружить уменьшение его линейных размеров.
Последний эффект позволяет предположить, что движение вещественных объектов со скоростью близкой к скорости света должно вызвать распад вещества объектов до уровня элементарных частиц.
Заключение
Кто-то спросит, зачем всё это? Физика достигла таких высот, что заново пересматривать её основы нет никакого смысла. На мой взгляд, если есть возможность что-то упростить, получить объяснения, которые современная физика делает не всегда внятно, то это следует делать.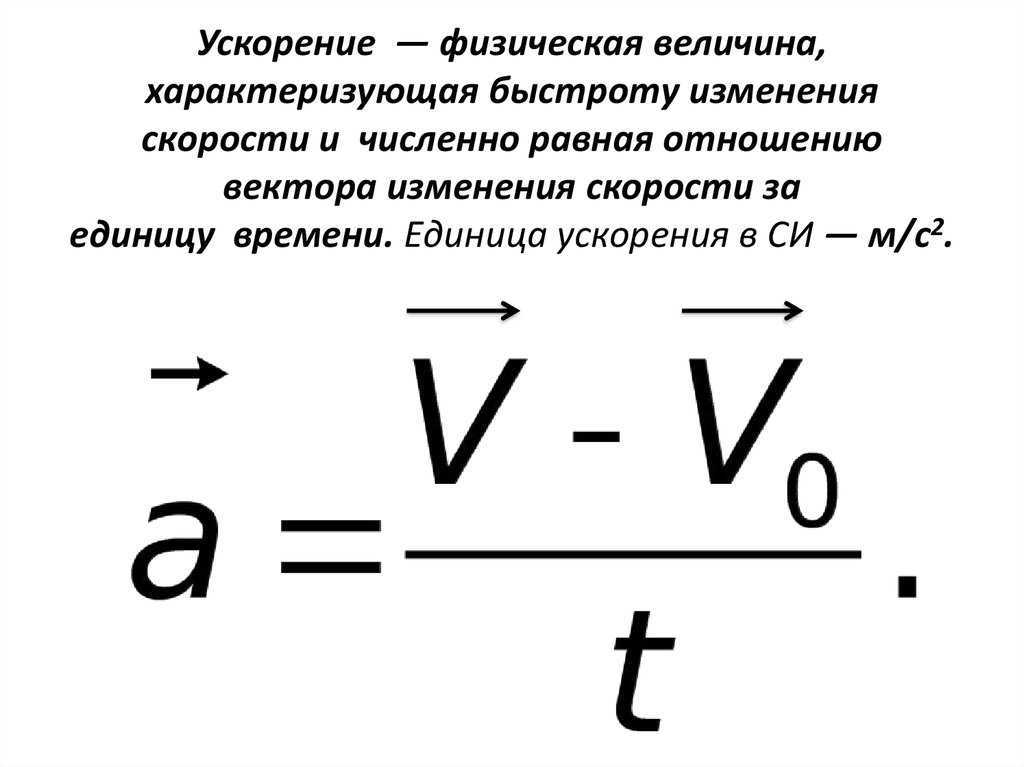
Кто сказал, что ОТО и электродинамика Максвелла отображают реальность? Это всего лишь модели, которые позволяют обнаружить практически подтверждаемые соотношения в физике. Но и соотношения в модели Медиосо практически подтверждаются численно, обычно практически совпадают с принятыми официальной наукой. А реальность скорее всего постичь не удастся никогда. Могут создаваться лишь модели, которые всё более внятно описывают воспринимаемый нами мир. Именно воспринимаемый, поскольку невозможно говорить о реальности не воспринимаемой ни кем. Говорят, что птицы могут “видеть” магнитное поле. Их реальность не очень сильно, но отличается от реальности человека.
Модель Медиосо это ещё одна модель, которая построена не на основе бытового опыта, а на основе систематизации всего исторического опыта физиков.
Можно ли говорить о ложности этой модели? Как может быть ложной модель позволяющая выполнить все известные вычисления, да ещё более простым путём?
В статье не приведён вывод показанных уравнений электродинамики, даже не показан закон Ампера, который также выводится в модели Медиосо. Не показан вывод соотношений полученных Эйнштейном для импульса и энергии. Но всё это выводится на элементарном уровне. Заинтересованный читатель может на основе показанного в статье материала даже самостоятельно вывести все эти соотношения.
Не показан вывод соотношений полученных Эйнштейном для импульса и энергии. Но всё это выводится на элементарном уровне. Заинтересованный читатель может на основе показанного в статье материала даже самостоятельно вывести все эти соотношения.
Возможно, что автор соберётся с силами и напишет учебник простой физики.
Конечно, очень странно выглядит модель, в которой такие фундаментальные понятия как пространство и время становятся подчинёнными. Но когда-то и пространство-время Эйнштейна физики не хотели принимать.
Не исключено, что предлагаемая модель может упростить программную симуляцию окружающего мира в играх или даже в программах предназначенных для расчёта движения и взаимодействия объектов Вселенной.
Модель имеет свои предсказания. Например, на основании свойств модели можно утверждать невозможность варп-двигателя. Также можно говорить об отсутствии метрического пространства под сферой Шварцшильда, что обеспечивает невозможность проникновения через неё материальных объектов. Можно говорить о мнимом метрическом пространстве под сферой Шварцшильда, но для нашей жизни требуется метрическое пространство в вещественном численном представлении.
Можно говорить о мнимом метрическом пространстве под сферой Шварцшильда, но для нашей жизни требуется метрическое пространство в вещественном численном представлении.
Модель рассматривает только одну Вселенную, которая не имеет метрических границ. Спрашивать о том, что существует за границами этой вселенной не имеет смысла. Для нас понятие “за границей” предполагает метрические параметры этой границы. Но метрическое пространство это лишь наблюдаемое свойство среды. В основе модели Медиосо нет ни метрического пространства, ни времени.
Дополнение 01.03.2022
Да простят меня оппоненты, и спасибо тем, кто поддержал идею (оказалось, что голоса разделились ровно поровну). Статья была в некоторой степени экспериментом. Эксперимент был направлен на проверку некоторых представлений социологии.
В журнале Социология науки и технологий. 2012. Том 3. № 3 под авторством А. Э. Петросян была опубликована статья “Умственная «слепота»”. Не примите за оскорбление. Это только название статьи, в которой описываются закономерности в социологии. Приведу небольшую выдержку из неё.
Это только название статьи, в которой описываются закономерности в социологии. Приведу небольшую выдержку из неё.
«Феномен слепоты
Неприятие новых идей не просто повсеместно. Оно вплетено в ткань человеческой жизни и пронизывает собой всё, что происходит в обществе. Это давно уже никого не удивляет. Поражает другое. “Слепота” столь же присуща и умам, работающим на передовых рубежах науки, то есть там, где, казалось бы, весь смысл и предназначение деятельности заключается в создании нового знания. Такова Реальность не только отдалённого прошлого, но и самого последнего времени.
Когда Э. Ферми (Fermi) направлял свою фундаментальную статью по бета-распаду в “Nature”, один из старейших и наиболее уважаемых журналов в области естествознания, он, конечно же, вполне допускал, что её могут отвергнуть. Однако, едва ли ему приходило в голову, что материал “забракуют” по причине отрыва от научной “почвы”. Редакторы сочли, что рукопись “спекулятивна” и “слишком далека от реальности”. В результате статья была опубликована на итальянском и немецком языках и только в 1939 году, когда Ферми присудили Нобелевскую премию, те же редакторы нашли возможность выпустить её у себя на английском».
В результате статья была опубликована на итальянском и немецком языках и только в 1939 году, когда Ферми присудили Нобелевскую премию, те же редакторы нашли возможность выпустить её у себя на английском».
На эту тему есть ещё множество исследований и в России и в Америке.
Реакция на статью, в которой ничего не утверждалось, а лишь предполагалось (возможна ли…), предлагалось к размышлению, была почти ожидаемой. Ожидания были даже хуже, чем оказалось.
Предлагаю всем хабравчанам быть уважительнее друг к другу, обсуждения проводить конструктивно, а не на уровне «вон из хабра мракобес (последнее предложение реально).
Различных кланов, группировок, формирований в мире уже достаточно. Такой прекрасный ресурс как Хабр, должен объединять, а не ссорить людей, помогать построить научно-техническое мировоззрение, а не загонять людей в «одиночную камеру».
“Ребята, давайте жить дружно!” 🙂
7.2: Работа – Физика LibreTexts
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 4006
- OpenStax
- OpenStax
Цели обучения
- Представление работы любой силы
- Оценить работу, совершаемую различными силами
В физике работа представляет собой тип энергии. Работа совершается, когда сила действует на то, что перемещается из одного положения в другое. Силы могут варьироваться в зависимости от положения, а перемещения могут происходить по разным траекториям между двумя точками. Сначала определим приращение работы dW, совершаемой силой \(\vec{F}\), действующей через бесконечно малое перемещение d\(\vec{r}\), как скалярное произведение этих двух векторов:0042
Работа совершается, когда сила действует на то, что перемещается из одного положения в другое. Силы могут варьироваться в зависимости от положения, а перемещения могут происходить по разным траекториям между двумя точками. Сначала определим приращение работы dW, совершаемой силой \(\vec{F}\), действующей через бесконечно малое перемещение d\(\vec{r}\), как скалярное произведение этих двух векторов:0042
Затем мы можем сложить вклады для бесконечно малых перемещений вдоль пути между двумя положениями, чтобы получить общую работу.
Работа, совершаемая силой
Работа, совершаемая силой, представляет собой интеграл силы по перемещению вдоль пути перемещения:
\[W_{AB} = \int_{path\; AB} \vec{F} \cdotp d \vec{r} \ldotp \label{7.2}\]
Векторы, участвующие в определении работы силы, действующей на частицу, показаны на рисунке \(\PageIndex{1}\).
 Сила, действующая на частицу, и ее бесконечно малое перемещение показаны в одной точке на пути между А и В. Бесконечно малая работа есть скалярное произведение этих двух векторов; общая работа является интегралом скалярного произведения вдоль пути.
Сила, действующая на частицу, и ее бесконечно малое перемещение показаны в одной точке на пути между А и В. Бесконечно малая работа есть скалярное произведение этих двух векторов; общая работа является интегралом скалярного произведения вдоль пути. Мы решили выразить скалярное произведение через величины векторов и косинус угла между ними, потому что значение скалярного произведения для работы может быть выражено более прямо в терминах величин и углов. С таким же успехом мы могли бы выразить скалярное произведение через различные компоненты, представленные в векторах. В двух измерениях это были x- и y-компоненты в декартовых координатах или r- и \(\varphi\)-компоненты в полярных координатах; в трех измерениях это были просто x-, y- и z-компоненты. Какой выбор удобнее, зависит от ситуации. Другими словами, вы можете выразить уравнение \ref{7.1} для работы силы, действующей на смещение, как произведение одного компонента, действующего параллельно другому компоненту. Судя по свойствам векторов, не имеет значения, берете ли вы составляющую силы, параллельную смещению, или составляющую смещения, параллельную силе, — в любом случае вы получите один и тот же результат.
Напомним, что произведение величины силы на косинус угла, образуемого силой с данным направлением, является составляющей силы в данном направлении. Компоненты вектора могут быть положительными, отрицательными или нулевыми, в зависимости от того, находится ли угол между вектором и компонентом-направлением между 0° и 90° или между 90° и 180° или равен 90°. В результате работа, совершаемая силой, может быть положительной, отрицательной или нулевой, в зависимости от того, направлена ли сила обычно в направлении смещения, обычно противоположно смещению или перпендикулярно смещению. Максимальная работа совершается данной силой, когда она действует вдоль направления перемещения (cos \(\theta\) = ± 1), а нулевая работа совершается, когда сила перпендикулярна перемещению (cos \(\theta \) = 0).
Единицы работы – это единицы силы, умноженные на единицы длины, которые в системе СИ равны ньютонам, умноженным на метры, Н • м. Эта комбинация называется джоулем по историческим причинам, о которых мы упомянем позже, и обозначается аббревиатурой J. В английской системе, до сих пор используемой в Соединенных Штатах, единицей силы является фунт (lb), а единицей расстояния является фут (фут), поэтому единицей работы является фут-фунт (фут • фунт).
В английской системе, до сих пор используемой в Соединенных Штатах, единицей силы является фунт (lb), а единицей расстояния является фут (фут), поэтому единицей работы является фут-фунт (фут • фунт).
Работа, выполняемая постоянными силами и контактными силами
9{B} dz \\ & = F_{x} (x_{B} – x_{A}) + F_{y} (y_{B} – y_{A}) + F_{z} (z_{B} – z_{A}) = \vec{F} \cdotp (\vec{r}_{B} – \vec{r}_{A}) \ldotp \end{split} \nonumber\]Рисунок \( \PageIndex{2a}\) показывает человека, прилагающего постоянную силу \(\vec{F}\) к ручке газонокосилки, которая образует угол \(\theta\) с горизонтом. Горизонтальное перемещение газонокосилки, на которое действует сила, равно \(\vec{d}\). Работа, выполненная газонокосилкой, равна
\[W = \vec{F} \cdotp \vec{d} = Fd \cos \theta,\nonumber \]
, который на рисунке также показан как горизонтальная составляющая силы, умноженная на величину смещения.
Рисунок \(\PageIndex{2}\): Работа, совершаемая постоянной силой. а) Человек толкает газонокосилку с постоянной силой. Составляющая силы, параллельная смещению, представляет собой выполненную работу, как показано в уравнении на рисунке. б) Человек держит портфель. Работа не совершается, так как перемещение равно нулю. (c) Человек в (b) идет горизонтально, держа портфель. Работа не совершается, потому что cos \(\theta\) равен нулю.
Составляющая силы, параллельная смещению, представляет собой выполненную работу, как показано в уравнении на рисунке. б) Человек держит портфель. Работа не совершается, так как перемещение равно нулю. (c) Человек в (b) идет горизонтально, держа портфель. Работа не совершается, потому что cos \(\theta\) равен нулю. На рисунке \(\PageIndex{2b}\) изображен человек с портфелем. Человек должен приложить направленную вверх силу, по величине равную весу портфеля, но эта сила не работает, потому что перемещение, на которое она действует, равно нулю. Так почему же вы в конечном итоге чувствуете усталость, просто держа портфель, если вы не выполняете с ним никакой работы? Ответ заключается в том, что мышечные волокна вашей руки сокращаются и выполняют работу внутри вашей руки, хотя сила, которую ваши мышцы воздействуют снаружи на портфель, не выполняет над ней никакой работы. (Часть силы, которую вы прикладываете, может также быть напряжением костей и связок вашей руки, но другие мышцы вашего тела будут выполнять работу, чтобы поддерживать положение вашей руки. )
)
На рисунке \(\PageIndex{2c}\), где человек в (b) идет горизонтально с постоянной скоростью, работа, выполняемая человеком с портфелем, по-прежнему равна нулю, но теперь, поскольку угол между приложенной силой и смещение равно 90° (\(\vec{F}\) перпендикулярно \(\vec{d}\)) и cos 90° = 0.
Пример \(\PageIndex{1}\): Расчет Работа, которую вы совершаете, чтобы толкнуть газонокосилку
Какую работу совершает на газонокосилке человек на рисунке \(\PageIndex{2a}\), если он прикладывает постоянную силу 75,0 Н под углом 35° ниже горизонтали и толкает косилку на 25,0 м по ровной поверхности?
Стратегия
Мы можем решить эту задачу, подставив данные значения в определение работы, совершаемой над объектом постоянной силой, выраженной в уравнении W = Fd cos \(\theta\). Сила, угол и перемещение известны, так что неизвестна только работа W.
Решение
Уравнение для работы:
\[W = Fd \cos \theta \ldotp \nonumber \]
Подстановка известных значений дает
\[W = (75,0\; N)(25,0\ m) \cos(35,0^{o}) = 1,54 \times 10^{3}\; J \ldotp\номер\]
Значение
Несмотря на то, что полтора килоджоуля могут показаться большой работой, мы увидим в книге «Потенциальная энергия и сохранение энергии», что это примерно столько же работы, сколько вы могли бы выполнить, сожгая одну шестую грамма. жира.
жира.
Когда вы косите траву, помимо вашей силы на газонокосилку действуют и другие силы, а именно контактная сила земли и сила гравитации Земли. Рассмотрим работу этих сил в общем виде. Для объекта, движущегося по поверхности, смещение d \(\vec{r}\) касается поверхности. Часть контактной силы на объекте, которая перпендикулярна поверхности, является нормальной силой \(\vec{N}\). Поскольку косинус угла между нормалью и касательной к поверхности равен нулю, имеем
\[dW_{N} = \vec{N} \cdotp d \vec{r} = \vec{0} \ldotp \nonumber \]
Обычная сила никогда не работает в этих обстоятельствах. (Обратите внимание, что если бы смещение d \(\vec{r}\) действительно имело бы относительную составляющую, перпендикулярную поверхности, объект либо покинул бы поверхность, либо прорвался бы через нее, и нормальной контактной силы больше не было бы. Однако , если объект больше, чем частица, и имеет внутреннюю структуру, нормальная контактная сила может совершать над ним работу, например, смещая его или деформируя его форму (об этом будет сказано в следующей главе). {B} |др| = – f_{k} |l_{AB}| \ldotp \label{7.3}\]
{B} |др| = – f_{k} |l_{AB}| \ldotp \label{7.3}\]
, где |l AB | длина пути на поверхности. (Обратите внимание, что, особенно если работа, совершаемая силой, отрицательна, люди могут ссылаться на работу, совершенную против этой силы, где dW против = -dW на . Работа, совершенная против силы, также может рассматриваться как работа, совершаемая против этой силы. работа, необходимая для преодоления этой силы, как в «Сколько работы требуется, чтобы преодолеть…?») Сила трения покоя, однако, может выполнять положительную или отрицательную работу. Когда вы идете, сила статического трения, оказываемая землей на заднюю ногу, ускоряет вас на части каждого шага. Если вы замедляетесь, сила земли на вашей передней ноге замедляет вас. Если вы едете на своем автомобиле с предельной скоростью по прямому ровному участку шоссе, отрицательная работа, выполняемая кинетическим трением сопротивления воздуха, уравновешивается положительной работой, выполняемой статическим трением дороги на ведущих колесах. Вы можете вытащить коврик из-под предмета таким образом, чтобы он скользил назад относительно коврика, но вперед относительно пола. В этом случае кинетическое трение, оказываемое ковриком на объект, может иметь то же направление, что и смещение объекта относительно пола, и совершать положительную работу. Суть в том, что вам нужно анализировать каждый конкретный случай, чтобы определить работу, совершаемую силами, будь то положительная, отрицательная или нулевая.
Вы можете вытащить коврик из-под предмета таким образом, чтобы он скользил назад относительно коврика, но вперед относительно пола. В этом случае кинетическое трение, оказываемое ковриком на объект, может иметь то же направление, что и смещение объекта относительно пола, и совершать положительную работу. Суть в том, что вам нужно анализировать каждый конкретный случай, чтобы определить работу, совершаемую силами, будь то положительная, отрицательная или нулевая.
Пример \(\PageIndex{2}\): Перемещение дивана
Вы решили переместить диван в новое место на горизонтальном полу гостиной. Нормальная сила на кушетке равна 1 кН, а коэффициент трения равен 0,6. (a) Сначала вы толкаете кушетку на 3 м параллельно стене, а затем на 1 м перпендикулярно стене (от A до B на рисунке \(\PageIndex{3}\)). Какую работу совершает сила трения? (b) Вам не нравится новое положение, поэтому вы возвращаете диван в исходное положение (от B к A на рисунке \(\PageIndex{3}\)). Какова была полная работа, совершенная против трения, перемещающего кушетку из исходного положения и обратно?
Рисунок \(\PageIndex{3}\): Вид сверху на пути для перемещения кушетки.
Стратегия
Величина силы кинетического трения о кушетку постоянна и равна произведению коэффициента трения на нормальную силу, f K = \(\mu_{K}\)N. Следовательно, работа, совершаемая им, равна W fr = −f K d, где d — длина пройденного пути. Сегменты путей являются сторонами прямоугольного треугольника, поэтому длину путей легко вычислить. В части (b) вы можете использовать тот факт, что работа, совершаемая против силы, является отрицательной по отношению к работе, совершаемой этой силой.
Решение
- Работа трения равна $$W = − (0,6)(1\; кН)(3\; m + 1\; m) = − 2,4\; кДж \ldotp\номер $$
- Длина пути по гипотенузе равна \(\sqrt{10}\) м, поэтому общая работа, совершаемая против трения, равна $$W = (0,6)(1\; кН)(3\; m + 1\). m + \sqrt{10}\ m) = 4,3\; кДж \ldotp\номер $$
Значение
Полный путь, на котором оценивалась работа трения, начинался и заканчивался в одной и той же точке (это был замкнутый путь), так что полное перемещение кушетки было равно нулю. Однако общая работа была не нулевой. Причина в том, что такие силы, как трение, классифицируются как неконсервативные силы или диссипативные силы, как мы обсудим в следующей главе.
Однако общая работа была не нулевой. Причина в том, что такие силы, как трение, классифицируются как неконсервативные силы или диссипативные силы, как мы обсудим в следующей главе.
Упражнение 7.1
Может ли кинетическое трение быть постоянной силой для всех путей?
Другой силой, действующей на газонокосилку, о которой говорилось выше, была сила земного притяжения, или вес косилки. Вблизи поверхности Земли гравитационная сила, действующая на объект массы m, имеет постоянную величину mg и постоянное направление вертикально вниз. Таким образом, работа, совершаемая силой тяжести над объектом, является скалярным произведением его веса и его смещения. Во многих случаях скалярное произведение гравитационной работы удобно выражать через x-, y- и z-компоненты векторов. В типичной системе координат ось x горизонтальна, а ось y вертикально вверх. Тогда гравитационная сила равна −mg \(\hat{j}\), поэтому работа, совершаемая гравитацией на любом пути из A в B, равна
\[W_{грав,\; AB} = -mg \hat{j} \cdotp (\vec{r}_{B} – \vec{r}_{A}) = -mg (y_{B} – y_{A}) \ldotp \ label{7. 4}\]
4}\]
Работа, совершаемая постоянной силой тяжести над объектом, зависит только от веса объекта и разницы высот, на которую перемещается объект. Гравитация совершает отрицательную работу над объектом, который движется вверх (y B > y A ), или, другими словами, вы должны совершить положительную работу против силы тяжести, чтобы поднять объект вверх. С другой стороны, гравитация совершает положительную работу над объектом, который движется вниз (y B < y A ), или вы выполняете отрицательную работу против гравитации, чтобы «поднять» объект вниз, контролируя его опускание, чтобы он не упал на землю. («Подъем» используется вместо «падение».)
Пример \(\PageIndex{3}\): Установка книги на полку
Вы поднимаете негабаритную библиотечную книгу весом 20 Н на 1 м вертикально вниз с полки , и перенесите его на 3 м горизонтально к столу (рис. \(\PageIndex{4}\)). Какую работу совершает гравитация над книгой? (б) Когда вы закончите, вы вернете книгу по прямой линии на прежнее место на полке. Какая общая работа была совершена против силы тяжести, когда книга перемещалась от ее первоначального положения на полке и обратно?
Какая общая работа была совершена против силы тяжести, когда книга перемещалась от ее первоначального положения на полке и обратно?
Мы только что видели, что работа, совершаемая постоянной силой тяжести, зависит только от веса перемещаемого объекта и разности высот на пройденном пути, W AB = −mg(yB − y А ). Мы можем оценить разницу в росте для ответов (а) и (б).
Решение
- Поскольку книга начинается на полке и поднимается вниз y B − y A = −1 m, имеем $$W = −(20\; N)( − 1\; m) = 20 J \ldotp \nonumber$$
- Существует нулевая разница в высоте для любого пути, который начинается и заканчивается в одном и том же месте на полке, поэтому W = 0,
Значение
Сила тяжести совершает положительную работу (20 Дж), когда книга опускается с полки. Гравитационная сила между двумя объектами — это сила притяжения, которая совершает положительную работу, когда объекты сближаются. Гравитация совершает нулевую работу (0 Дж), когда книга перемещается горизонтально с полки на стол, и отрицательную работу (-20 Дж), когда книга перемещается со стола обратно на полку. Суммарная работа силы тяжести равна нулю [20 Дж + 0 Дж + (-20 Дж) = 0].
Гравитационная сила между двумя объектами — это сила притяжения, которая совершает положительную работу, когда объекты сближаются. Гравитация совершает нулевую работу (0 Дж), когда книга перемещается горизонтально с полки на стол, и отрицательную работу (-20 Дж), когда книга перемещается со стола обратно на полку. Суммарная работа силы тяжести равна нулю [20 Дж + 0 Дж + (-20 Дж) = 0].
В отличие от трения или других диссипативных сил, описанных в примере \(\PageIndex{2}\), полная работа, совершаемая против силы тяжести на любом замкнутом пути, равна нулю. Положительная работа совершается против силы тяжести на восходящих частях замкнутого пути, но такая же отрицательная работа совершается против силы тяжести на нисходящих частях. Другими словами, работа, выполненная 
Упражнение 7.2
Может ли гравитация Земли быть постоянной силой для всех путей?
Работа, выполняемая изменяющимися силами
В общем, силы могут различаться по величине и направлению в точках пространства, а пути между двумя точками могут быть кривыми. Бесконечно малая работа, совершаемая переменной силой, может быть выражена через компоненты силы и перемещения по пути:
\[dW = F_{x} dx + F_{y} dy + F_{z} dz \ ldotp \nonumber\]
Здесь компоненты силы являются функциями положения вдоль пути, а перемещения зависят от уравнений пути. (Хотя мы решили проиллюстрировать dW в декартовых координатах, другие координаты лучше подходят для некоторых ситуаций.) Уравнение \ref{7.2} определяет общую работу как линейный интеграл или предел суммы бесконечно малых объемов работы. Физическая концепция работы проста: вы вычисляете работу для крошечных перемещений и суммируете их. Иногда математика может показаться сложной, но следующий пример демонстрирует, насколько чисто они могут работать.
Пример \(\PageIndex{4}\): Работа переменной силы по криволинейному пути
Объект движется по параболическому пути y = (0,5 м −1 )x 2 от начала координат A = (0, 0) в точку B = (2 м, 2 м) под действием силы \(\vec{F}\) = (5 Н/м)y \(\hat{i}\) + (10 Н/м)x \(\hat{j}\) (рисунок \(\PageIndex{5}\)). Вычислить выполненную работу.
Рисунок \(\PageIndex{5}\): Параболический путь частицы под действием заданной силы.Стратегия 9{2}) \влево(\dfrac{8}{3}\вправо) = 33,3\; J \ldotp \nonumber\]
Значимость
Этот интеграл не составило труда. Вы можете выполнить те же шаги, что и в этом примере, чтобы вычислить линейные интегралы, представляющие работу для более сложных сил и траекторий. В данном примере все было дано с точки зрения x- и y-компонент, которые проще всего использовать при оценке работы в данном случае. В других ситуациях величины и углы могут быть проще.
Упражнение \(\PageIndex{4}\)
Найдите работу, совершаемую той же силой в примере \(\PageIndex{4}\) на кубическом пути, y = (0,25 м −2 )x 3 , между теми же точками A = (0, 0) и B = (2 м, 2 м).
В примере \(\PageIndex{4}\) вы видели, что для вычисления линейного интеграла его можно свести к интегралу по одной переменной или параметру. Обычно для этого есть несколько способов, которые могут быть более или менее удобными, в зависимости от конкретного случая. В примере \(\PageIndex{4}\) мы свели линейный интеграл к интегралу по x, но с тем же успехом мы могли бы свести все к функции от y. Мы этого не сделали, потому что функции в y включают квадратный корень и дробные показатели степени, что может быть менее знакомо, но для наглядности мы делаем это сейчас. Решая x и dx через y по параболическому пути, мы получаем 9{2/3} = 33,3\; J \ldotp \nonumber\]
Как и ожидалось, результат точно такой же, как и раньше.
Одной из очень важных и широко применяемых переменных сил является сила, действующая на абсолютно упругую пружину, которая удовлетворяет закону Гука \(\vec{F}\) = −k\(\Delta \vec{x}\), где k – постоянная пружины, а \(\Delta \vec{x}\) = \(\vec{x}\) – \(\vec{x}_{eq}\) – смещение от нерастянутой (равновесной) пружины ) положение (законы движения Ньютона). Обратите внимание, что нерастянутое положение совпадает с положением равновесия только в том случае, если никакие другие силы не действуют (или, если они действуют, они компенсируют друг друга). Силы между молекулами или в любой системе, претерпевающей небольшие отклонения от устойчивого равновесия, ведут себя примерно как сила пружины.
Обратите внимание, что нерастянутое положение совпадает с положением равновесия только в том случае, если никакие другие силы не действуют (или, если они действуют, они компенсируют друг друга). Силы между молекулами или в любой системе, претерпевающей небольшие отклонения от устойчивого равновесия, ведут себя примерно как сила пружины.
Чтобы рассчитать работу силы пружины, мы можем выбрать ось x вдоль длины пружины в направлении увеличения длины, как показано на рисунке \(\PageIndex{6}\), с началом в точке положение равновесия x eq = 0. (Тогда положительный x соответствует растяжению, а отрицательный x – сжатию.) При таком выборе координат сила пружины имеет только x-компоненту, F x = −kx, а работа, выполненная при изменении x с x A на x B , равна 9.{2} \big) \ldotp \label{7.5}\]
Рисунок \(\PageIndex{6}\): (a) Пружина не действует в положении равновесия. Пружина оказывает усилие в направлении, противоположном (b) растяжению или растяжению и (c) сжатию.
Обратите внимание, что W AB зависит только от начальной и конечной точек A и B и не зависит от фактического пути между ними, если он начинается в A и заканчивается в B. То есть фактический путь может включать переходя туда и обратно, прежде чем закончить.
Еще одна интересная вещь, которую следует отметить в уравнении \ref{7.5}, заключается в том, что для этого одномерного случая вы можете легко увидеть соответствие между работой, совершаемой силой, и площадью под кривой силы в зависимости от ее смещения. Напомним, что в общем случае одномерный интеграл является пределом суммы бесконечно малых f(x)dx , представляющих площадь полос, как показано на рисунке \(\PageIndex{7}\). В уравнении \ref{7.5}, поскольку F = −kx представляет собой прямую линию с наклоном −k, при построении графика зависимости от x «площадь» под линией представляет собой просто алгебраическую комбинацию треугольных «площадей», где «площади» выше ось x положительна, а нижняя — отрицательна, как показано на рисунке \(\PageIndex{8}\).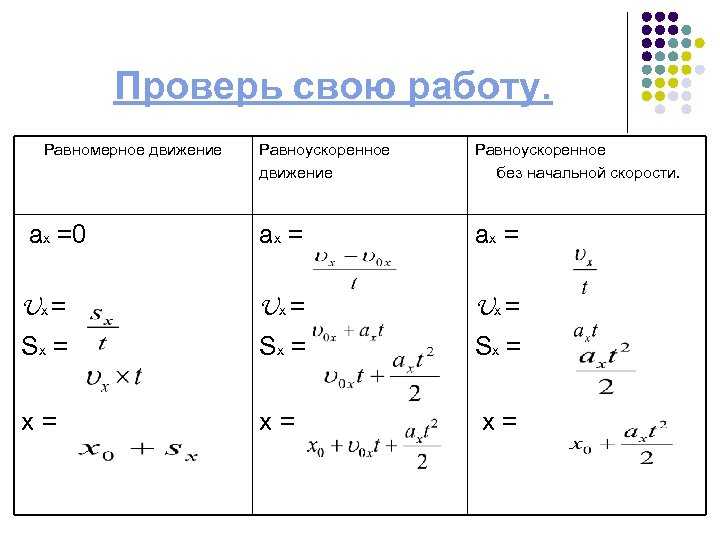 Величина одной из этих «площадей» равна половине основания треугольника по оси x, умноженной на высоту треугольника по оси силы. (Вокруг слова «площадь» заключены кавычки, потому что в этом продукте базовой высоты используются единицы работы, а не квадратные метры.)
Величина одной из этих «площадей» равна половине основания треугольника по оси x, умноженной на высоту треугольника по оси силы. (Вокруг слова «площадь» заключены кавычки, потому что в этом продукте базовой высоты используются единицы работы, а не квадратные метры.)

Пример \(\PageIndex{5}\): работа, совершаемая силой пружины
Совершенно упругая пружина требует работы 0,54 Дж, чтобы растянуться на 6 см от положения равновесия, как показано на рисунке \(\PageIndex{6b}\) . а) Какова его жесткость k? б) Какую работу необходимо совершить, чтобы растянуть его еще на 6 см?
Стратегия
«Необходимая» работа означает работу, выполняемую против силы пружины, которая является отрицательной работой в уравнении \ref{7.5}, то есть 9{2}],\; так\; к = 1,62\; J \ldotp\nonumber$$
Значимость
Поскольку работа силы пружины не зависит от пути, вам нужно было только вычислить разницу в количестве \(\frac{1}{2}\)kx 2 в конце точки. Обратите внимание, что работа, необходимая для растяжения пружины от 0 до 12 см, в четыре раза больше работы, необходимой для ее растяжения от 0 до 6 см, потому что эта работа зависит от квадрата степени растяжения от равновесия, \(\frac{1} {2}\)кх  В этом случае работа по растяжению пружины от 0 до 12 см также равна работе для составного пути от 0 до 6 см с последующим дополнительным растяжением от 6 до 12 см. Следовательно, 4W(0 см до 6 см) = W(0 см до 6 см) + W(6 см до 12 см) или W(6 см до 12 см) = 3W(0 см до 6 см), так как мы нашел выше.
В этом случае работа по растяжению пружины от 0 до 12 см также равна работе для составного пути от 0 до 6 см с последующим дополнительным растяжением от 6 до 12 см. Следовательно, 4W(0 см до 6 см) = W(0 см до 6 см) + W(6 см до 12 см) или W(6 см до 12 см) = 3W(0 см до 6 см), так как мы нашел выше.
Упражнение \(\PageIndex{5}\)
Пружина в примере \(\PageIndex{5}\) сжата на 6 см от ее равновесной длины. (а) Сила пружины совершает положительную или отрицательную работу и (б) какова ее величина?
Эта страница под заголовком 7.2: Работа публикуется под лицензией CC BY 4.0 и была создана, изменена и/или курирована OpenStax с использованием исходного контента, отредактированного в соответствии со стилем и стандартами платформы LibreTexts; подробная история редактирования доступна по запросу.
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- ОпенСтакс
- Лицензия
- СС BY
- Версия лицензии
- 4,0
- Программа OER или Publisher
- ОпенСтакс
- Показать оглавление
- нет
- Теги
- source@https://openstax.
 org/details/books/university-physics-volume-1
org/details/books/university-physics-volume-1 - работа
- работа, совершаемая силой
- source@https://openstax.
Алгоритм
– Как рассчитать пути для объектов с ограниченным ускорением?
Я еще не разобрался с полными уравнениями для этого, но вот несколько иллюстраций, которые помогут нам разобраться в проблеме. Это сводится к некоторой геометрии:
(Значки автомобилей через Кенни)
Из любой заданной начальной точки и ориентации мы можем нарисовать два круга с нашим минимальным радиусом поворота – один слева, один справа. Они описывают точки в самом узком начале нашего пути.
Мы можем сделать то же самое для любого желаемого конечного положения и ориентации. Эти круги описывают самый узкий конец нашего пути.
Теперь задача сводится к поиску пути, который соединяет один из начальных кругов с одним из конечных кругов, касаясь каждого из них по касательной.
(Предполагается, что нам не нужно находить путь вокруг препятствий между ними, что не было упомянуто в вопросе. Ответ Штормграда касается того, как мы можем использовать информацию навигационного графика для таких типов задач. Как только мы получим последовательность узлов, которые нужно пройти, мы можем применить описанный ниже метод к каждому сегменту плана.)
Если для простоты мы используем прямые линии, мы получим что-то вроде этого:
Это дает нам предельный случай. После того, как вы нашли путь этим методом, вы можете искусственно раздуть один или оба начальных и конечных круга, чтобы получить менее прямой, но более плавный путь, вплоть до точки, где два круга соприкасаются.
Вычисление этих путей
Давайте проработаем случаи для одного направления поворота – скажем, мы начинаем наш путь, поворачивая направо.
Центр нашего правого поворотного круга:
startRightCenter = carStart.position + carStart.right * minRadius
Назовем угол прямого участка нашего пути (отсчитываемый от положительной оси x) pathAngle
Если мы нарисуем вектор от rightCenter до точки, где мы покидаем поворотный круг (в этой точке мы должны быть обращены лицом к pathAngle), то этот вектор будет. ..
..
startOffset = minRadius * (-cos(pathAngle), sin(pathAngle))
Это означает, что точка выхода из круга должна быть… мы снова входим в поворотный круг, зависит от того, хотим ли мы завершить поворот налево или направо:
// Чтобы закончить поворот направо: повторный вход = endRightCenter + startOffset // Чтобы закончить левым поворотом: (кроссовер) повторный вход = endLeftCenter - startOffset
Теперь, если мы сделали нашу работу правильно, линия, соединяющая отправление с повторным входом , должна быть перпендикулярна startOffset :
точка(повторный вход - отправление, startOffset) = 0
И решение этого уравнения даст нам углы, при которых это верно. (Здесь я использую множественное число, потому что технически таких углов два, но один из них предполагает движение задним ходом, что обычно не то, что нам нужно)
Давайте для примера заменим правый поворот на правый поворот:
точка (endRightCenter + startOffset - startRightCenter - startOffset, startOffset) = 0 точка (endRightCenter - startRightCenter, startOffset) = 0 pathAngle = atan2 (endRightCenter - startRightCenter)
Случай кроссовера более сложен – для него я еще не рассчитал всю математику.