
основные формулы, определения и примеры
Статика
В задачах статики рассматриваются условия равновесия тел. Равновесием тел называют состояние, при котором координаты всех точек тела не меняются.
Условия равновесия:
а) все силы, приложенные к телу, уравновешены;
б) сумма моментов сил, вращающих тело по часовой стрелке, равна сумме моментов сил, вращающих его против часовой стрелки.
Моментом силы М называется произведение силы, действующей на тело, имеющее ось вращения, и плеча этой силы.
Плечом силы l называется кратчайшее расстояние от оси вращения до линии действия силы.
На рис. 65 изображен рычаг длиной L с осью вращения,
проходящей через точку О перпендикулярно плоскости чертежа. На рычаг действует сила F вдоль линии действия mn. Плечом этой силы является длина перпендикуляра I, опущенного из оси вращения на линию действия силы.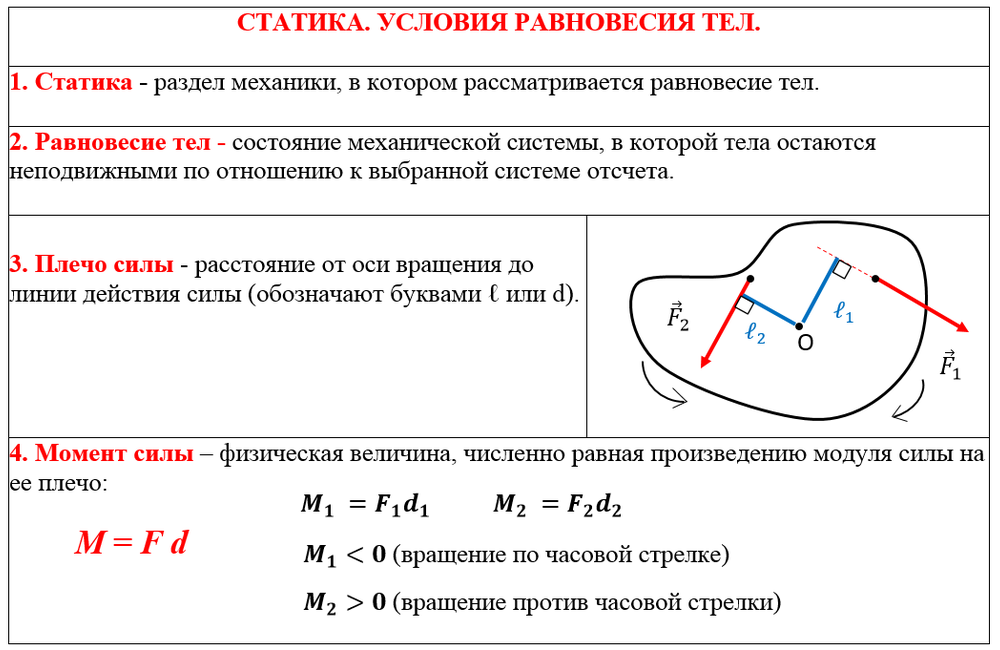
Рассмотрим пример на условие равновесия тела, имеющего ось вращения. На рис. 66 изображен рычаг массой m, к концам которого подвешены грузы массами и , в результате чего на концы рычага действуют оба веса грузов , равные силам тяжести . К центру масс рычага с приложена сила тяжести mg. Равновесие наступит, когда момент силы тяжести , которая вращает рычаг вокруг оси вращения, проходящей через точку опоры О, против часовой стрелки, будет равен сумме моментов сил тяжести , вращающих рычаг по часовой стрелке:
или согласно определению момента силы
Другой пример:
На рис. 67 изображен рычаг массой m и длиной l, к правому концу которого человек приложил силу F под углом а к рычагу. Рычаг будет приподнят, если момент силы тяжести будет меньше момента силы , приложенной человеком к концу рычага. В предельном случае
поэтому
Различают устойчивое, безразличное и неустойчивое равновесия.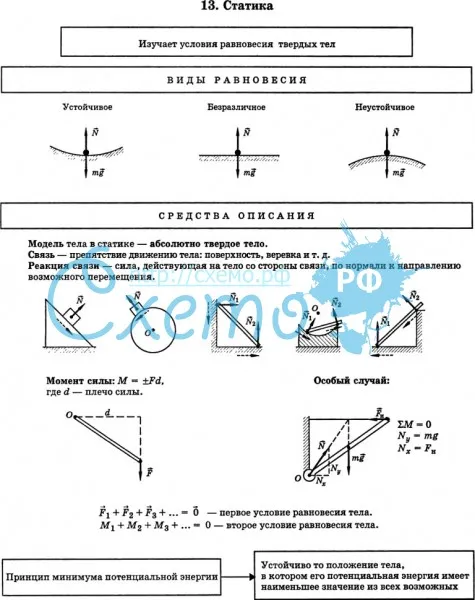
Пусть на дне углубления находится шарик, на который действуют две силы: сила тяжести и сила реакции опоры. Эти силы уравновешивают друг друга, поэтому шарик находится в покое, т.е. в состоянии равновесия. При этом его центр тяжести занимает наиболее низкое из всех возможных положение, соответствующее минимальной потенциальной энергии шарика. Если шарик вывести из положения равновесия, вкатив его по горке на некоторую высоту, то его центр тяжести окажется выше, чем прежде, и при этом потенциальная энергия шарика увеличится. Если теперь шарик предоставить самому себе, то он покатится вниз, стремясь вернуться в состояние с минимальной потенциальной энергией. Таким образом, шарик на дне углубления находится в состоянии устойчивого равновесия.
Равновесие называется безразличным, когда при изменении положения тела положение его центра тяжести относительно опоры тела не изменяется, благодаря чему потенциальная энергия тела остается прежней.
Пусть шарик располагается на горизонтальной поверхности. Если его покатить по ней, то положение центра тяжести шарика относительно этой поверхности все время будет оставаться прежним. Высота центра тяжести шарика над поверхностью изменяться не будет, и, значит, потенциальная энергия шарика тоже будет оставаться неизменной.
Если его покатить по ней, то положение центра тяжести шарика относительно этой поверхности все время будет оставаться прежним. Высота центра тяжести шарика над поверхностью изменяться не будет, и, значит, потенциальная энергия шарика тоже будет оставаться неизменной.
Следовательно, на горизонтальной поверхности шарик находится в состоянии безразличного равновесия.
Равновесие называется неустойчивым, если при выводе тела из состояния равновесия оно уже не может вернуться самостоятельно в прежнее положение и занимает новое положение, соответствующее его минимуму потенциальной энергии. При выводе тела из неустойчивого равновесия его центр тяжести располагается ниже, чем в состоянии равновесия, вследствие чего потенциальная энергия уменьшается.
Пусть шарик находится на вершине горки. Если его вывести из этого состояния, то он уже не сможет самостоятельно вернуться в прежнее положение. При этом положение центра тяжести шарика понизится и, следовательно, его потенциальная энергия уменьшится. Шарик будет скатываться до тех пор, пока его центр тяжести не займет низшее положение и потенциальная энергия не станет минимальной.
Шарик будет скатываться до тех пор, пока его центр тяжести не займет низшее положение и потенциальная энергия не станет минимальной.
Следовательно, равновесие тела, расположенного на вершине выпуклости, является неустойчивым.
Теперь рассмотрим условие равновесия тела, имеющего площадь опоры. Если такое тело отклонить от положения равновесия так, что линия действия силы тяжести этого тела будет пересекать площадь опоры внутри периметра, ограничивающего ее, то тело самостоятельно вернется в исходное положение. Равновесие тела, соответствующее такому отклонению, является устойчивым.
Если тело, имеющее площадь опоры, отклонить так сильно от положения равновесия, что линия действия силы тяжести выйдет за пределы, ограниченные периметром основания тела, то при этом центр тяжести тела расположится ниже, чем когда оно опиралось на всю площадь опоры, следовательно, потенциальная энергия тела уменьшится. Нескомпенсированная сила тяжести создаст вращающий момент сил, в результате чего тело опрокинется.
Например, человек, сидящий на стуле, не сможет подняться, не наклонив корпус вперед так, чтобы линия действия его силы тяжести прошла через периметр, ограничивающий площадь опоры подошв обуви. В противном случае сила тяжести создаст вращающий момент сил, который вернет человека в прежнее положение.
Для улучшения устойчивости различных зданий и сооружений увеличивают их площадь опоры и понижают положение центра тяжести.
Эта теория со страницы подробного решения задач по физике, там расположена теория и подробное решения задач по всем темам физики:
Задачи по физике с решением
Возможно вам будут полезны эти страницы:
Статика в физике – основные понятия, формулы и определения с примерами
Содержание:
Статика в физике:
До сих пор мы изучали движение тел. А нужно ли изучать состояние покоя тел? Безусловно, да! Ведь обеспечить состояние покоя и устойчивость домов, мостов, плотин, телевизионных вышек и т.
Состояние тела, при котором оно остается неподвижным относительно данной инерциальной системы отсчета, называют состоянием механического равновесия.
Рассмотрим, при каких условиях тела находятся в состоянии равновесия.
Первое условие следует из второго закона Ньютона: для равновесия тела необходимо, чтобы векторная сумма всех сил, приложенных к нему, была равна нулю:
Например, для равновесия шарика (рис. 170) векторная сумма силы тяжести
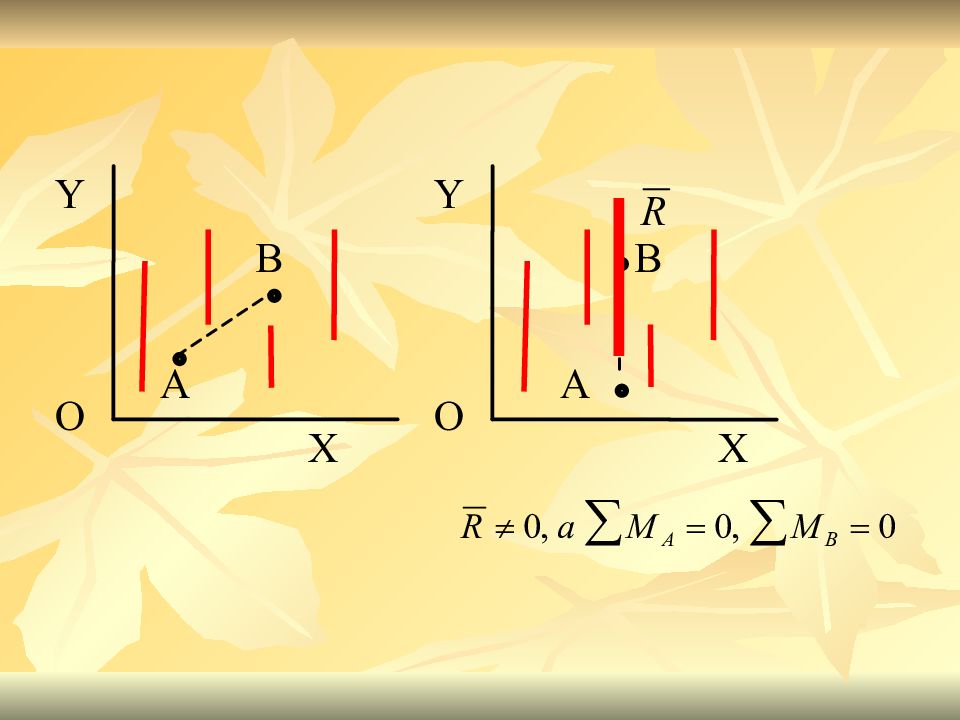
Но достаточно ли выполнения условия (1) для равновесия тела? Например, для тела, имеющего ось вращения: колеса автомобиля (рис. 171, а), колеса обозрения (рис. 171, б)у ворота (рис. 171, в), рулевого колеса (рис. 172) и т. д.?
Па рисунке 172, а на рулевое колесо действуют сила тяжести mg и сила реакции оси N. Их сумма , и колесо находится в состоянии покоя. Останется ли рулевое колесо в покое, если к нему приложить еще две силы (рис.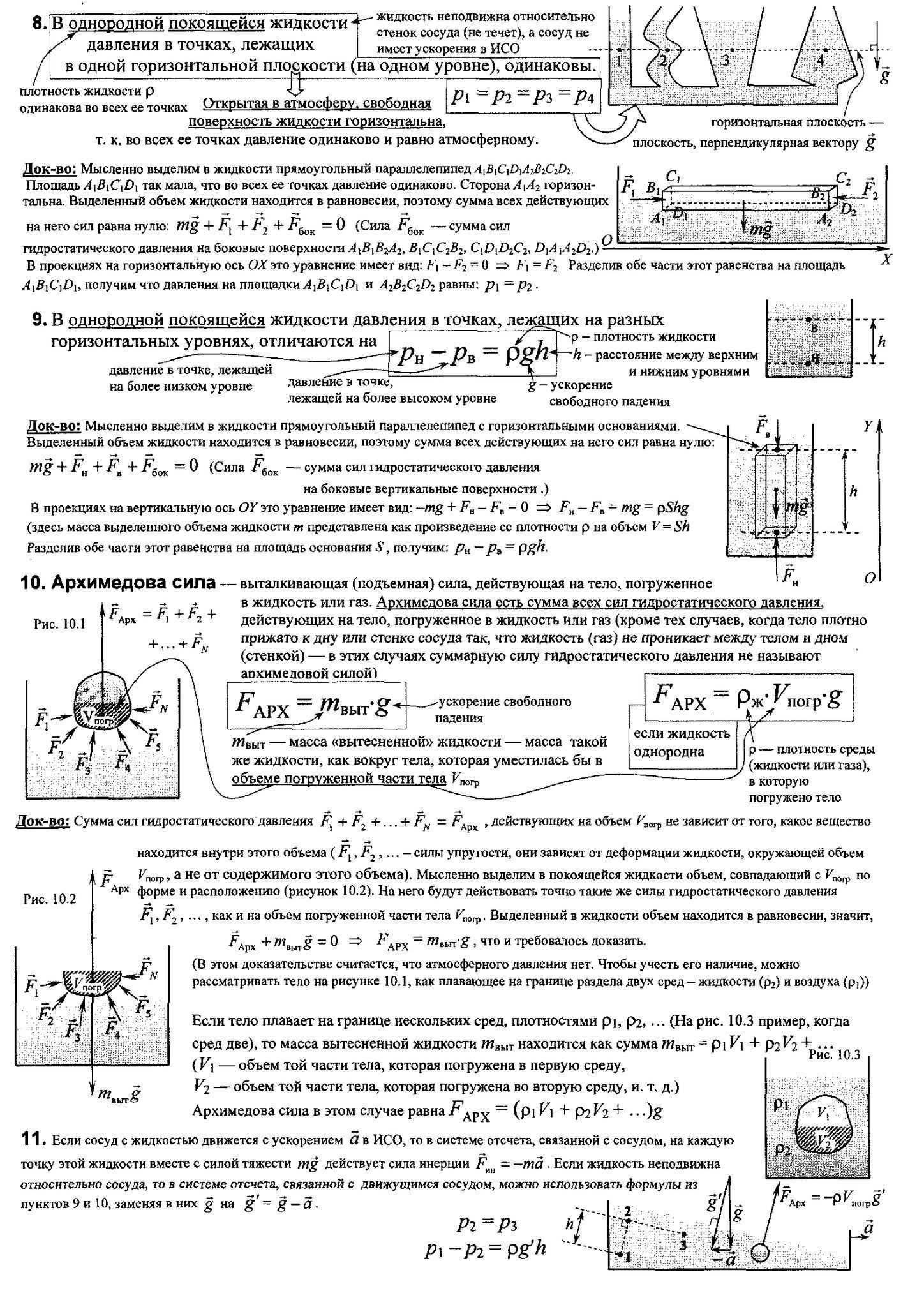 172, б), модули которых равны, направления противоположны, а точки приложения не совпадают (такие силы в механике называют парой сил)?
172, б), модули которых равны, направления противоположны, а точки приложения не совпадают (такие силы в механике называют парой сил)?
Несмотря на то что условие (1) по-прежнему выполняется: , руль не останется в покое. Из-за действия сил он будет поворачиваться вокруг своей оси. Значит, выполнения условия (1) для равновесия тел
Для ответа на вопрос проведем опыты с диском (рис. 173, а), имеющим горизонтальную ось вращения, проходящую через его центр — точку О. С помощью штырей, вставленных в отверстия, и нитей будем прикладывать к диску силы, имеющие различные направления, точки приложения и модули (рис. 173, б и в).
Сила тяжести диска FT и сила реакции N оси приложены к диску в его центре (рис. 173, а). Они не вызывают вращения диска, и на рисунках 173, б, в мы их показывать не будем. Поворот диска могут вызвать только те силы, которые действуют вдоль линии, не проходящей через ось вращения (рис.
Расстояние от оси вращения до линии действия силы называют плечом силы.
На рисунке 173, б расстояние — это плечо силы — силы .
На рисунке 173, б сила , стремится повернуть диск против хода часовой стрелки, а сила — по ходу часовой стрелки. Куда в итоге повернется диск?
Опыты показывают: если то диск повернется против хода часовой стрелки, если — по ходу часовой стрелки. А при выполнении условия
диск будет находиться в состоянии равновесия.
Произведение модуля силы на ее плечо называют моментом силы (вращающим моментом).
Момент силы может быть положительным или отрицательным. Все зависит от того, в какую сторону сила стремится повернуть тело вокруг данной оси. Если против хода часовой стрелки, то если по ходу, то
Единица момента силы в СИ — ньютон-метр (Н * м). Один ньютон-метр равен вращающему моменту, создаваемому силой 1 ньютон, имеющей плечо 1 метр.
Условие равновесия (2), выраженное через моменты сил с учетом их знаков, примет вид , или
А если к телу приложено более двух сил (рис. 173, в)? Тогда, как показывает опыт, для равновесия необходимо равенство нулю алгебраической суммы моментов всех сил, действующих на тело:
Это и есть второе условие равновесия. Момент силы очень важен для практики! Например, если при закручивании болта или гайки мы приложим слишком большой вращающий момент, то резьба будет сорвана. Для ответственных работ используют гаечные Рис. 174 ключи с датчиком вращающего момента (рис. 174).
Главные выводы
- Плечо силы — это расстояние от оси вращения до линии действия силы.
- Момент силы равен произведению модуля силы и ее плеча, взятому со знаком «плюс» или «минус».
- Тело, имеющее неподвижную ось вращения, будет находиться в равновесии, если алгебраическая сумма моментов сил, приложенных к нему, равна нулю.

Посетите цех современного завода и понаблюдайте, как работают машины. Они, как разумные существа, прессуют, гнут, режут металлические листы, считают, сортируют, взвешивают, перемещают и упаковывают изделия. Эти огромные и маленькие машины-автоматы, машины-роботы действуют быстрее и точнее человека.
Однако даже у таких сложных устройств, как роботы (рис. 178), механическая часть является комбинацией простых механизмов: рычагов, наклонных плоскостей, блоков, винтов (рис. 179).
Элементы простых механизмов мы обнаружим у ворота (см. рис. 171, в, с. 118), гаечного ключа (см. рис. 174, с. 120), топора (рис. 180) и т. д.
Зачем нужны простые механизмы? На рисунке 179, а — в показано, как, приложив силу F или силы (рис. 179, г) к механизму, можно поднять груз весом Р. Данные силы, однако, не приложены непосредственно к грузу (кроме случая б) и не направлены вверх. Значит, простой механизм дает возможность изменить точку приложения силы и ее направление. Кроме того, он позволяет поднять груз силой, гораздо меньшей, чем вес этого груза (случаи а, б, г), т. е. дает выигрыш в силе.
Кроме того, он позволяет поднять груз силой, гораздо меньшей, чем вес этого груза (случаи а, б, г), т. е. дает выигрыш в силе.
Что такое выигрыш в силе? От чего он зависит? Рассмотрим это на примере рычага (рис. 181).
Рычагом может служить твердое тело, способное вращаться вокруг заданной оси (или точки опоры).
Различают рычаги первого и второго рода. У рычага первого рода (рис. 181, а) вес поднимаемого груза Р и приложенная сила F находятся по разные стороны от точки опоры О, а у рычага второго рода — но одну сторону от нее (рис. 181, б).
В обоих случаях вес Р груза больше, чем приложенная сила F. Значит, рычаг дает выигрыш в силе.
Найдем выигрыш в силе для рычага первого рода (рис. 181, а). Обозначим плечи сил относительно точки опоры О через . Плечо силы реакции опоры N равно нулю. Как мы знаем, при равновесии моменты сил компенсируют друг друга: . В результате
Итак, выигрыш в силе для рычага равен отношению плеча прикладываемой силы к плечу веса поднимаемого груза.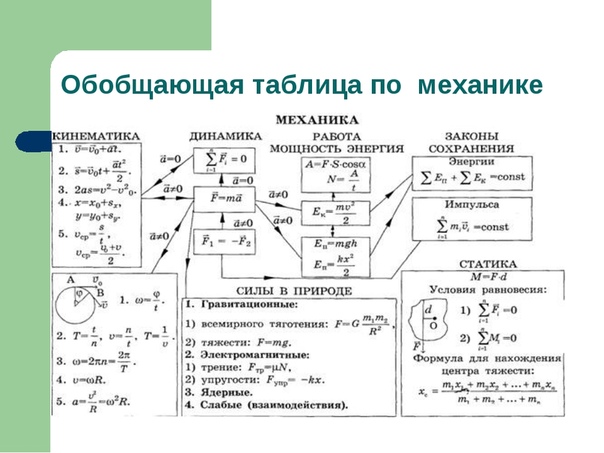 Докажите самостоятельно, что формула справедлива и для рычага второго рода.
Докажите самостоятельно, что формула справедлива и для рычага второго рода.
Рассмотрим блоки (рис. 182). Их широко используют на стройках, в портах, на складах и т. д.
Блок представляет собой колесо с желобом, через который проходит трос (канат, веревка, нить и т. д.). Если ось блока закреплена (рис. 183, а), то блок называют неподвижным, если нет, то — подвижным (рис. 185, а).
Дает ли блок выигрыш в силе? Проведем опыт с неподвижным блоком (рис. 183, а). К одному концу нити, перекинутой через блок, прикрепим груз, а к другому — динамометр. При покое или равномерном подъеме груза показания динамометра F практически равны весу груза Р. Почему неподвижный блок не дает выигрыша в силе?
На рисунке 183, б изображены силы, действующие на блок: сила тяжести блока , сила реакции оси и силы упругости нитей . Будем рассматривать блок как рычаг первого рода. Относительно оси блока О плечи сил равны нулю, а плечи сил — радиусу блока:
По правилу моментов: , откуда . Учитывая, что , получим Р = F.
Учитывая, что , получим Р = F.
Неподвижный блок не дает выигрыша в силе, а лишь изменяет ее направление.
Зачем же применять неподвижный блок, если выигрыша в силе нет? Ведь для изменения направления силы можно взять любую перекладину (рис. 184). Можно, но невыгодно, так как потери на трение будут во много раз больше, чем при использовании блока.
Проведем теперь опыт с подвижным блоком (рис. 185, а), ось которого О перемещается вместе с грузом. Один конец перекинутой через блок нити закрепим, а за другой будем поднимать груз. При равномерном подъеме груза весом Р = 4 Н (как и в состоянии покоя) показания динамометра F 2 Н, т. е. почти в два раза меньше веса груза (рис. 185, а).
Этот результат вполне понятен. Ведь блок с грузом удерживают две нити. Сила натяжения каждой из нитей равна половине веса груза. Чтобы доказать это, будем рассматривать блок как рычаг второго рода с осыо в точке D (рис. 185, б). Относительно этой оси у силы натяжения нити F, плечо равно нулю, а у силы натяжения F2 оно равно , а плечи силы тяжести блока и веса груза равны R. Тогда, по правилу моментов, Отсюда, пренебрегая силой находим: Так как F2 = F, то
Тогда, по правилу моментов, Отсюда, пренебрегая силой находим: Так как F2 = F, то
Подвижный блок дает выигрыш в силе приблизительно в 2 раза. Отметим, что при расчетах мы не учитывали силу трения на оси блока.
Для любознательных:
Гораздо больший выигрыш в силе дает полиспаст — устройство, состоящее из нескольких пар подвижных и неподвижных блоков. При трех парах блоков (рис. 186, а) и отсутствии трения полиспаст дат бы выигрыш в силе, равный (на самом деле выигрыш будет несколько меньше). Полиспасты широко используют для подъема тяжестей. Оцените количество блоков, при котором полиспаст даст возможность поднять автомобиль усилиями всего одного человека (рис. 186, б).
Главные выводы:
- Простые механизмы дают возможность изменить точку приложения силы, ее модуль и направление.
- Рычаг дает выигрыш в силе во столько раз, во сколько раз плечо прилагаемой силы больше плеча веса поднимаемого груза.

- Неподвижный блок не дает выигрыша в силе; а лишь изменяет ее направление.
- Подвижный блок дает выигрыш в силе в 2 раза (если пренебречь весом блока и трением).
Пример №1
На одном конце линейки длиной l = 1,0 м подвешен груз массой = 450 г (рис. 187). Посередине линейки снизу находится опора, относительно которой линейка может свободно поворачиваться в вертикальной плоскости. На каком расстоянии от точки опоры линейки подвешен груз массой = 750 г, если линейка, располагаясь горизонтально, находится в равновесии?
Решение
Из сил, действующих на линейку, на рисунке 188 покажем только те, моменты которых относительно точки О не равны пулю.
По условию равновесия Откуда
Ответ:
Пример №2
Какую минимальную силу нужно приложить к концу веревки для подъема мешка цемента массой = 50 кг на второй этаж строящегося дома с помощью подвижного блока?
Решение
Так как блок подвижный, то:
Тогда:
Ответ:
Наклонная плоскость и золотое правило механикиНа примере рычагов и блоков мы узнали, что с помощью простых механизмов можно получить выигрыш в силе. А можно ли получить выигрыш в работе?
А можно ли получить выигрыш в работе?
Прежде чем ответить на этот вопрос, изучим еще один простой механизм — наклонную плоскость. Она служит основой таких конструкций, как пандусы, эскалаторы, конвейеры и т. д. (рис. 192).
Дает ли применение наклонной плоскости выигрыш в силе? Рассмотрим пример. Грузчик перемещает тяжелый контейнер по наклонной плоскости (рис. 192, г). Cила, которую он при этом прикладывает, гораздо меньше, чем вес контейнера.
Как рассчитать выигрыш в силе, который дает наклонная плоскость?
Проведем простой опыт. Поместим брусок массой m на наклонную плоскость длиной l = АВ и высотой h = ВС (рис. 193). Приложив к нему с помощью динамометра силу параллельную наклонной плоскости, будем равномерно перемещать брусок вдоль нее. Показания динамометра F будут меньше, чем значение силы тяжести бруса Отношение определяет выигрыш в силе. От чего он зависит?
Рассмотрим все силы, действующие на брусок. Кроме силы и силы тяжести на брусок действует сила реакции наклонной плоскости . При отсутствии трения она перпендикулярна наклонной плоскости. Силу разложим на две составляющие:
При отсутствии трения она перпендикулярна наклонной плоскости. Силу разложим на две составляющие:
Из подобия треугольника сил (выделенного цветом) и следует:
Так как при равномерном подъеме то:
Выигрыш в силе, получаемый с помощью наклонной плоскости, равен отношению ее длины к ее высоте (при отсутствии трения). Чем меньше угол наклона а плоскости к горизонту, тем больше отношение , а значит, тем больше выигрыш в силе. Это подтверждается нашими повседневными наблюдениями. Тянуть санки, катить багажную тележку вверх но пологому склону гораздо легче, чем но крутому.
При выводе формулы (2) мы не учитывали трения. Но на самом деле трение есть. Из-за него при подъеме бруска приходится прилагать большую силу, и выигрыш в силе будет меньшим.
На практике для уменьшения трения проводят смазку деталей, заменяют скольжение качением, применяют «воздушную подушку» (рис. 194).
Для любознательных
Идея наклонной плоскости заложена и в таких механизмах, как клин и винт. Разновидностью клина является топор, дающий большой выигрыш в силе. Винтовые домкраты (рис. 195, а) применяют для подъема автомобилей и других массивных объектов.
Разновидностью клина является топор, дающий большой выигрыш в силе. Винтовые домкраты (рис. 195, а) применяют для подъема автомобилей и других массивных объектов.
Винты, болты, шурупы (рис. 195, б) используют для соединения деталей. При этом трение приносит как вред, так и пользу. Оно затрудняет завинчивание, но предотвращает самопроизвольное ослабление резьбовых соединений.
Мы выяснили, что большинство простых механизмов дают выигрыш в силе. А дают ли они выигрыш в работе?
С физической величиной, называемой «работа», и с ее единицей в СИ джоулем вы познакомились в 7-м классе.
Для любознательных
Среди всех физических величин работа занимает особое место. Tie совершив работы, нельзя привести в движение поезд, автомобиль, корабль, самолет, ракету и т. д. Нельзя перевезти груз, подняться на нужный этаж (ни пешком, ни на лифте). Невозможно построить дом и любое другое сооружение.
Производственная деятельность невозможна без совершения работы.
Значимость работы еще шире. Непрерывно совершать работу необходимо для поддержания жизни. Наше сердце при каждом ударе совершает работу, примерно равную одному джоулю.
Рассмотрим работу различных простых механизмов. Силу трения пока учитывать не будем.
Наклонная плоскость. Для нее полезная работа — это работа по подъему груза на высоту h: Совершенная работа прилагаемой силы по перемещению груза по наклонной плоскости на пути l равна: Из равенства (2) получим: , т. е.
Наклонная плоскость не дает выигрыша в работе.
Неподвижный блок. Для него равны и модули сил, и пройденные пути (см. рис. 183, с. 123), а значит, и соответствующие работы. Неподвижный блок выигрыша в работе не дает.
Подвижный блок. Он дает выигрыш в силе, близкий к двум, но и двукратный проигрыш в пути (см. рис. 185, с. 124). Подвижный блок также не дает выигрыша в работе.
Рычаг. Выигрыша в работе не дает и рычаг (как первого, так и второго рода). Докажите это самостоятельно.
Все опыты подтверждают: если с помощью простого механизма выигрывают в силе, то по меньшей мере во столько же раз проигрывают в пути. Учитывая, что даже самый сложный механизм сводится к сочетанию простых механизмов, можно сделать вывод: ни один механизм не дает выигрыша в работе. Это утверждение получило название «золотое правило механики».
Итак, выиграть в работе нельзя. А вот проиграть — можно. Причина этому — сила трения. Кроме того, существуют и другие потери, например работа по подъему самого механизма в процессе его использования. Из-за этого совершенная работа всегда больше, чем полезная работа :
Отношение называется коэффициентом полезного действия (КПД). КПД, выраженный в процентах, равен:
Так как совершенная работа всегда больше полезной, КПД механизма всегда меньше единицы (т. е. меньше 100 %). Чтобы увеличить КПД, необходимо уменьшить «бесполезную» работу. Прежде всего — работу по преодолению сил трения.
е. меньше 100 %). Чтобы увеличить КПД, необходимо уменьшить «бесполезную» работу. Прежде всего — работу по преодолению сил трения.
Машина, которая имела бы = 100 % или более, называется вечным двигателем. Весь опыт развития науки и техники говорит о том, что вечный двигатель неосуществим. Заметим, однако, что попытки его изобрести не прекращаются до сих пор.
Для любознательных:
Идея создания вечного двигателя возникла в далеком прошлом. На его создание были направлены усилия изобретателей на протяжении нескольких веков.
На рисунке 196 изображен один из проектов вечного двигателя. Разберитесь самостоятельно или с помощью учителя: почему автор устройства считал, что оно будет самопроизвольно вечно вращаться? Чего не учел автор?
Главные выводы:
- Наклонная плоскость дает выигрыш в силе во столько раз, во сколько раз ее длина больше высоты.
- Ни один механизм не дает выигрыша в работе: во сколько раз выигрывают в силе, во столько раз проигрывают в пути.
- Из-за силы трения и других потерь коэффициент полезного действия любого механизма меньше 100 %.
Пример №3
С помощью подвижного блока ведро песка массой m = 20 кг поднимают на высоту h = 4,0 м, прилагая к канату силу F = 110 Н. Определите совершенную при этом подъеме работу и КПД блока. Модуль ускорения свободного падения
Решение
При использовании подвижного блока происходит проигрыш в пути в 2 раза, т. е. s = 2h. Совершенная работа:
Полезная работа по подъему ведра с песком:
КПД блока:
Ответ:
Центр тяжести и виды равновесияЧитаем сводку очередного происшествия: «Из-за смещения центра тяжести корабль потерял устойчивость». А что такое «центр тяжести»? Что такое «устойчивость»?
Центром тяжести тела называется точка приложения силы тяжести, действующей на него.
У однородных тел правильной формы центр тяжести находится в геометрическом центре тела (рис. 198, а, б, в, г). При этом центр тяжести может не совпадать ни с одной из точек этого тела (рис. 198, г).
198, а, б, в, г). При этом центр тяжести может не совпадать ни с одной из точек этого тела (рис. 198, г).
Л как найти центр тяжести тела произвольной формы? Это можно сделать с помощью простого опыта. Подвесим пластину на нити, прикрепленной к ней в некоторой точке (рис. 199, а). Центр тяжести пластины будет находиться на одной линии с нитью — на вертикальной прямой . Отметим на пластине эту прямую.
Изменим точку подвеса (рис. 199, б) и отметим вертикаль . Точка С, лежащая на пересечении прямых , — центр тяжести пластины.
Центр тяжести тела можно определить путем расчетов.
Например, для тела, состоящего из двух грузов, соединенных легким стержнем (рис. 200), с помощью правила моментов легко найти отношение расстояний от центра тяжести С до грузов:
Следовательно, центр тяжести расположен ближе к более массивному грузу.
Положение центра тяжести очень важно для устойчивости высотных сооружений, подъемных кранов, автомобилей, кораблей и т. д. Смещение центра тяжести судна из-за неправильной загрузки может привести к его опрокидыванию.
д. Смещение центра тяжести судна из-за неправильной загрузки может привести к его опрокидыванию.
А что такое устойчивость? От чего она зависит?
Проведем опыт. Поместим шарик 1 в лунку (рис. 201, а), шарик 2 — на вершину горки (рис. 201, б), а шарик 3 — на горизонтальную поверхность (рис. 201, в). Каждый из шариков находится в состоянии равновесия (в покое).
Отклоним шарики от положений равновесия и отпустим. Шарик 1 вернется в исходную точку (рис. 202, а), шарик 2 отклонится от исходного положения еще больше (рис. 202, б). Шарик 3 останется в состоянии равновесия (рис. 202, в).
Каждый случай соответствует одному из трех видов равновесия: а — устойчивому, б — неустойчивому, в — безразличному.
Равновесие называется устойчивым, если при малом отклонении от него тело возвращается в исходное положение, неустойчивым — если отдаляется от него еще больше, безразличным — если остается в равновесии.
Почему в нашем опыте шарики вели себя по-разному? Все зависело от результирующей силы (рис. 203), действующей на шарик при его отклонении от положения равновесия. В случае а сила F была направлена к положению равновесия, в случае б — от него. В случае в сила F была равна нулю.
203), действующей на шарик при его отклонении от положения равновесия. В случае а сила F была направлена к положению равновесия, в случае б — от него. В случае в сила F была равна нулю.
А как при этом изменялась потенциальная энергия тела?
Из рисунка 203 понятно, что потенциальная энергия тела при его отклонении от положения устойчивого равновесия увеличивалась, от неустойчивого — уменьшалась, от безразличного — не изменялась. Значит, положению устойчивого равновесия соответствует минимум потенциальной энергии.
Проведем еще один опыт. Расположим на горизонтальной доске три одинаковых бруска Ау Б и В (рис. 204).
Какой из брусков находится в состоянии равновесия? Все три.
Но одинакова ли степень устойчивости состояний этих брусков? Продолжим опыт (рис. 205). Будем постепенно наклонять доску, оставляя на ней по одному бруску (чтобы брусок при этом не соскальзывал, приделаем к доске небольшую ступеньку). Первым опрокинется брусок А, вторым — Б? третьим — В.
Первым опрокинется брусок А, вторым — Б? третьим — В.
Значит, степень устойчивости равновесия у брусков разная. Почему? Потому, что опрокидывание тела происходит тогда, когда линия действия силы тяжести выходит за пределы опорной площадки. Видно, что угол опрокидывания а тем больше, чем больше размеры этой площадки и чем ниже расположен центр тяжести тела.
Сделаем практически важный вывод: чем ниже центр тяжести тела и чем больше опорная площадка, тем состояние тела более устойчиво.
Обратите внимание: опорная площадка — ото плоскость, ограниченная прямыми, проходящими через крайние точки контакта тела с опорой. Площадь S опорной площадки может во много раз превосходить площадь непосредственного контакта тела с поверхностью опоры (рис. 206).
Для любознательных:
Достаточная опорная площадка и правильное положение центра тялсести предусматривается в конструкции всех высотных сооружений. Так, устойчивость 540-метровой Останкинской телебашни (рис. 207) обеспечивается прежде всего тем, что ее центр тяжести находится практически на уровне земли. Это обеспечено заглублением в землю железобетонного фундамента массой около 200 000 тонн.
Так, устойчивость 540-метровой Останкинской телебашни (рис. 207) обеспечивается прежде всего тем, что ее центр тяжести находится практически на уровне земли. Это обеспечено заглублением в землю железобетонного фундамента массой около 200 000 тонн.
Главные выводы:
- Точка приложения силы тяжести тела называется центром тяжести.
- Существует три вида равновесия: устойчивое, неустойчивое и безразличное.
- Чем ниже расположен центр тяжести тела и чем больше опорная площадь, тем более устойчиво состояние тела.
Пример №4
Из однородной квадратной пластинки со стороной a = 10 см вырезана часть (рис. 208).
Определите положение центра тяжести пластинки с вырезом.
Решение
Для определения положения центра (точки С) вернем на свое место вырезанную часть (рис. 209). Сила тяжести всей пластинки будет равна сумме сил тяжести вырезанной части и оставшейся части . Относительно точки О алгебраическая сумма моментов этих сил равна нулю:
Отсюда
Так как , то
Поскольку плечо
Ответ:
Действие жидкости и газа на погруженные в них тела. Выталкивающая сила. Закон Архимеда
Выталкивающая сила. Закон АрхимедаДо сих пор мы рассматривали равновесие тел, не учитывая влияние среды (жидкости, газа), в которой они находятся. А как влияет среда на равновесие тел?
Погруженный в воду мяч всплывает, воздушные шары (рис. 210, а) поднимаются вверх, шары-зонды (рис. 210, б) улетают на огромную высоту. Какая сила устремляет их вверх?
Проведем опыт. К динамометру подвесим пластилиновый брусок (рис. 211, а). Опустим брусок в воду (рис. 211,6). Показания динамометра уменьшатся. Значит, на погруженное тело со стороны жидкости действует направленная вверх выталкивающая сила. Ее значение равно разности показаний динамометра до и после погружения тела.
От чего зависит выталкивающая сила? Сравним значения вытал кивающей силы при полном (рис. 211, б) и частичном (рис. 212) погружении бруска. Мы убеждаемся, что выталкивающая сила тем больше, чем больше объем погруженной части тела.
А зависит ли выталкивающая сила от плотности жидкости? Продолжим опыты. Погрузим пластилиновый брусок в раствор поваренной соли в воде. Повышая концентрацию соли, будем увеличивать плотность раствора. Опыт показывает: при увеличении плотности жидкости выталкивающая сила возрастает.
Погрузим пластилиновый брусок в раствор поваренной соли в воде. Повышая концентрацию соли, будем увеличивать плотность раствора. Опыт показывает: при увеличении плотности жидкости выталкивающая сила возрастает.
Итак, выталкивающая сила тем больше, чем больше объем погруженной в нее части тела и чем больше плотность жидкости.
Выталкивающая сила действует и на тела, находящиеся в газе (рис. 213, а, б).
А как на выталкивающую силу влияет плотность газа? Проведем опыт. Уравновесим с помощью рычажных весов закрытую стеклянную колбу, помещенную внутрь сосуда (рис. 213, а), а затем вольем в этот сосуд углекислый газ (рис. 213, б). (Газы тоже можно переливать!) Так как плотность углекислого газа больше, чем воздуха, он вытеснит воздух из сосуда и займет его место. Равновесие весов нарушится (рис. 213, б), указывая на то, что в углекислом газе выталкивающая сила больше, чем в воздухе.
Следовательно, и в газах выталкивающая сила растет с увеличением плотности среды.
Почему возникает выталкивающая сила? Как ее рассчитать?
Для простоты расчетов рассмотрим погруженное в жидкость тело, имеющее форму прямоугольного параллелепипеда. Па рисунке 214 показаны силы, с которыми жидкость плотностью р действует на тело. Каждая из сил перпендикулярна к той поверхности, к которой она приложена.
Силы давления жидкости, действующие на боковые грани, только сжимают тело, но не выталкивают его. Выталкивающая сила возникает из-за того, что направленная вверх сила давления жидкости больше, чем сила направленная вниз. В итоге модуль выталкивающей силы
Из 7-го класса вы знаете, что сила давления F, с которой жидкость действует на поверхность площадью S, равна pS, где р — давление жидкости. Значит,
где р1 — давление на глубине — на глубине h2(рис. 214). Вам известно также, что при увеличении глубины погружения на h давление возрастает на Тогда
где — это высота тела (рис. 214).
214).
Из (2)и(3) следует
Но — объем погруженного тела. Следовательно:
Произведение равно — массе жидкости, вытесненной телом при его погружении, равно , т. е. весу вытесненной жидкости. В результате выталкивающая сила:
На тело, погруженное в жидкость (газ), действует выталкивающая сила, направленная вертикально вверх и равная весу жидкости (газа), вытесненной телом.
Это утверждение называют законом Архимеда а выталкивающую силу — силой Архимеда (и обозначают ее FA), по имени выдающегося древнегреческого ученого, открывшего данный закон за 250 лет до н. э.
Мы вывели формулу (4), рассматривая тело в форме параллелепипеда. Многочисленные опыты показывают: закон Архимеда применим к телам любой формы, погруженным в жидкость или газ полностью или частично.
Подчеркнем, что при частичном погружении тела в формуле (4) под объемом следует понимать объем погруженной в жидкость части тела.
Теперь ответим еще на один вопрос. Почему тела, погруженные в жидкость, например в воду, ведут себя по-разному: одни из них (камни, металлические предметы) тонут, другие (куски дерева, пенопласта, пробки) плавают, частично погрузившись в воду, а третьи (рыбы, подводные лодки) плавают в толще воды?
Проведем опыт. Погрузим в стакан с соленой водой (рис. 215) кубики из сырого картофеля (1), пенопласта (2) и пластилина (3). Пластилиновый кубик опустится на дно, пенопластовый всплывет, а кубик из картофеля (при определенной концентрации соли в воде) останется внутри жидкости.
В чем причина этого различия? Все зависит от соотношения плотности тела и плотности жидкости. В нашем опыте плотность соленой воды пластилина — сырого картофеля — пенопласта —
Сравнив плотность жидкости с плотностью тел , сделаем вывод, что однородное тело:
- при утонет в жидкости;
- при будет в состоянии равновесия на любой Рис. 215 глубине внутри жидкости;
- при всплывет и будет находиться в состоянии равновесия, частично погрузившись в жидкость.

Объясните результаты опыта (рис. 215), сравнив силу тяжести FT каждого из тел с силой Архимеда FA.
Главные выводы:
- Выталкивающая сила (сила Архимеда) есть результат действия сил давления жидкости (газа) на погруженное тело.
- Закон Архимеда: «На тело, погруженное в жидкость (газ), действует выталкивающая сила, направленная вертикально вверх и равная весу жидкости (газа), вытесненной телом».
- Однородное тело тонет в жидкости, если плотность тела больше плотности жидкости, находится в равновесии внутри жидкости, если их плотности равны, и находится в состоянии равновесия, частично погрузившись в жидкость, если плотность тела меньше плотности жидкости.
На использовании силы Архимеда основано плавание плотов, лодок, кораблей, а также воздухоплавание. А что такое воздухоплавание? Чем оно отличается от полетов птиц, самолетов, ракет?
В предыдущем параграфе мы выяснили, что однородное тело, состоящее из вещества плотностью , не тонет в жидкости плотностью при условии . А при каком условии будет плавать неоднородное тело, состоящее из материалов различной плотности (корабль, подводная лодка, катер)? При таком же условии, только вместо плотности вещества нужно взять среднюю плотность тела
А при каком условии будет плавать неоднородное тело, состоящее из материалов различной плотности (корабль, подводная лодка, катер)? При таком же условии, только вместо плотности вещества нужно взять среднюю плотность тела
Среднюю плотность тела рассчитывают по формуле аналогичной формуле для плотности вещества. Средняя плотность тела зависит от плотности материалов, из которых оно состоит. Так, если из куска пластилина (рис. 216, а) слепить шар с воздушной полостью (рис. 216, б), то средняя плотность шара станет меньше плотности пластилина . А если заполнить полость свинцовой дробью (рис. 216, в)? Средняя плотность шара будет больше, чем плотность пластилина .
Корабли, паромы, яхты и т. д. конструируют так, чтобы их средняя плотность (р) была меньше плотности воды. В кораблях (рис. 217, a) для этого создают водонепроницаемые отсеки, заполненные воздухом. А для того чтобы подводная лодка (рис. 217, б) могла идти как в надводном, так и в подводном режиме, в ее конструкции (рис. 218) предусматривают возможность «управления» ее средней плотностью . Чтобы двигаться под водой, нужно увеличить среднюю плотность . Для этого специальные балластные отсеки лодки заполняют водой. Чтобы уменьшить среднюю плотность, воду из этих отсеков вытесняют сжатым воздухом (рис. 218).
218) предусматривают возможность «управления» ее средней плотностью . Чтобы двигаться под водой, нужно увеличить среднюю плотность . Для этого специальные балластные отсеки лодки заполняют водой. Чтобы уменьшить среднюю плотность, воду из этих отсеков вытесняют сжатым воздухом (рис. 218).
Для морских и речных судов существует максимальная глубина безопасного погружения. Ее называют предельной осадкой. Уровень погружения при предельной осадке отмечают па борту судна красной линией — ватерлинией (рис. 217, а).
Масса воды , вытесненной погруженным до ватерлинии судном, называется водоизмещением судна.
Знаменитый «Титаник» имел водоизмещение
Осадка судна в незагруженном состоянии меньше предельной, а при наличии максимально допустимого груза — равна ей. Соответственно, масса корабля m без груза меньше его водоизмещения . Разность , равная массе максимально допустимого груза, называется грузоподъемностью судна. Современные морские танкеры, перевозящие нефть, имеют грузоподъемность 500 ООО т и больше.
А что такое воздухоплавание? В отличие от авиации, в которой для полета используют устройства тяжелее воздуха (самолеты, вертолеты), воздухоплавание осуществляется с помощью таких летательных аппаратов, как воздушные шары, дирижабли и т. д.
Как и для плавания судов, основой воздухоплавания служит использование силы Архимеда.
Для любознательных:
Первый воздушный шар (рис. 219) был изобретен во Франции братьями Монгольфье и успешно запущен в 1782 г. Внизу шара было отверстие, под которым находилась жаровня с горячими углями. Воздух внутри шара постепенно нагревался, расширялся, и часть его уходила из шара. Его средняя плотность становилась меньше плотности воздуха снаружи, и шар поднимался вверх. Такие воздушные шары не могли подняться на большие высоты.
Как увеличить высоту подъема шара? Для этого современные шары наполняют не теплым воздухом, а гелием (его плотность примерно в 7 раз меньше плотности воздуха). Выталкивающая сила становится достаточной, чтобы шар с грузом мог подняться в стратосферу.
Выталкивающая сила становится достаточной, чтобы шар с грузом мог подняться в стратосферу.
Разность между силой Архимеда и силой тяжести ненагруженного воздушного шара равна весу груза, который шар может поднять, т. е. его подъемной силе.
Почему летательные шары заполняют не водородом — самым легким из газов, а гелием? Потому, что водород (в отличие от гелия) образует с воздухом крайне взрывоопасную смесь!
Воздушные шары, поднимающиеся на сравнительно небольшие высоты, называются аэростатами, а на большие (более 11 км, где начинается стратосфера) — стратостатами. Аппараты, использующие в дополнение к силе Архимеда силу тяги двигателей, снабженных пропеллерами, называются дирижаблями (рис. 220).
Воздухоплавание нашло свое практическое применение. Запуская шары-зонды, снабженные датчиками, метеорологи получают информацию о температуре, давлении, о загрязненности атмосферы на различных высотах. Дирижабли применяются для перевозки крупногабаритных грузов.
Пользуются популярностью полеты на воздушных шарах в развлекательных целях (рис. 221).
Использование законов физики позволило человеку освоить воздушный и водный океаны. Воздух и вода — самые необходимые составляющие для жизни человека и всего живого мира. Поэтому осваивать воздушные и водные пространства надо экологически грамотно, стараясь не причинить им вреда.
Главные выводы:
- Плавание судов и воздухоплавание основаны на использовании выталкивающей силы (силы Архимеда).
- Масса воды, вытесненной погруженным до ватерлинии судном, называется водоизмещением судна.
- Грузоподъемность судна равна разности между водоизмещением и массой ненагруженного судна.
- Подъемная сила воздушного шара равна разности между силой Архимеда, действующей на него, и силой тяжести ненагруженного шара.
Пример №5
Площадь льдины S = 5,0 м2. На сколько увеличится глубина погружения льдины, если на нее ляжет морской котик массой m = 100 кг?
Решение
На льдину в воде действуют сила тяжести и сила Архимеда (рис. 222). В состоянии равновесия После того как на льдину ляжет морской котик, на нее подействует сила давления , равная весу котика: Льдина погрузится глубже в воду. При этом увеличится сила Архимеда, действующая на льдину: Увеличение силы Архимеда обусловлено весом морского котика: Так как Отсюда
222). В состоянии равновесия После того как на льдину ляжет морской котик, на нее подействует сила давления , равная весу котика: Льдина погрузится глубже в воду. При этом увеличится сила Архимеда, действующая на льдину: Увеличение силы Архимеда обусловлено весом морского котика: Так как Отсюда
Ответ: = 2 см.
Элементы статикиУсловия равновесия тела: 1. Векторная сумма сил, приложенных к телу, равна нулю. 2. Алгебраическая сумма моментов приложенных к телу сил равна нулю.
Изучение систем взаимодействующих частиц (абсолютно твердых тел) значительно упрощается, если рассматривать их поступательное и вращательное движения по отдельности.
Для рассмотрения динамики вращения необходимо определить физическую величину, представляющую собой «вращательный» аналог силы для поступательного движения и называемую моментом силы.
Эксперименты показывают, что в данном случае важна как точка приложения силы, так и направление ее действия относительно оси вращения. Для учета этих факторов вводится плечо силы, определяемое как кратчайшее расстояние от оси вращения (точка О на рисунке 45) до линии действия силы, т. е. длина перпендикуляра l, опущенного из точки О на линию действия силы (см. рис. 45).
Для учета этих факторов вводится плечо силы, определяемое как кратчайшее расстояние от оси вращения (точка О на рисунке 45) до линии действия силы, т. е. длина перпендикуляра l, опущенного из точки О на линию действия силы (см. рис. 45).
Момент силы М равен произведению модуля силы и ее плеча (см. рис. 45):
M = Fl. (1)
Основным результатом взаимодействия тел в динамике является возникновение ускорений. Из второго закона Ньютона следует, что под действием внешних сил и их моментов центр масс тела может перемещаться с некоторым ускорением и при этом тело может вращаться с угловым ускорением, причем ориентация этой оси может меняться с течением времени.
Движение замкнутой системы взаимодействующих частиц оказывается достаточно сложным. Однако в такой системе имеется точка, которая движется по прямой линии с постоянной скоростью. Эта точка называется центром масс и ее положение определяется выражением
Часто необходимо знать, при каких условиях тело, на которое действует несколько сил, покоится относительно некоторой инерциальной системы отсчета.
Существует область инженерной науки, изучающая условия равновесия твердых тел. Важно знать, какие силы необходимо приложить, чтобы удержать тело в состоянии покоя или предотвратить его разрушение.
Раздел механики, в котором изучаются условия равновесия, называется статикой.
Условия равновесия формулируются в статике для абсолютно твердого тела, т. е. тела, которое под действием внешних сил не деформируется.
Равновесным называется неизменное во времени состояние тела, т. е. равновесие — это такое состояние тела, при котором оно покоится (v = 0), движется равномерно или вращается с постоянной угловой скоростью вокруг какой-либо оси, проходящей через центр масс.
Название состояния равновесия произошло от латинского слова aequilibrium, означающего «равный» + «весы».
Для задания положения абсолютно твердого тела в данной инерциальной системе отсчета следует задать радиус-вектор его центра масс, а также ориентацию тела (угол ) относительно центра масс (рис. 46).
46).
Если, например, твердое тело массой m может совершать движение в плоскости Оху выбранной системы отсчета под действием результирующей силы то для его равновесия (покоя) необходимо выполнение следующих двух условий.
1. Для равновесия центра масс в инерциальной системе отсчета Оху необходимо:
равенство нулю векторной суммы всех внешних сил, действующих на тело:
(сумма проекций внешних сил на любое направление также равна нулю).
2. Для постоянства угла ориентации ( = const) необходимо:
- равенство нулю алгебраической суммы моментов внешних сил относительно любой точки тела:
Моменты сил, вращающих тело против направления движения часовой стрелки, условно считают положительными, а по часовой — отрицательными.
Если оба условия выполняются для центра масс тела, то они выполняются и для любой точки этого тела.
При выполнении первого условия равновесия ускорение центра масс равно нулю, а при выполнении второго — равно нулю угловое ускорение. В случае если в начальный момент времени тело покоится, то оно будет оставаться в покое и в дальнейшем.
В случае если в начальный момент времени тело покоится, то оно будет оставаться в покое и в дальнейшем.
Отметим, что если тело не может вращаться, то для его равновесия достаточно выполнения первого условия. А если у тела есть закрепленная ось вращения, то для равновесия достаточно выполнения второго условия, так как приложенные силы можно разложить на составляющие, перпендикулярные и параллельные оси вращения. Составляющие сил, параллельные оси, не могут вращать тело вокруг нее. Вследствие этого они не будут оказывать никакого влияния на равновесие тела, они будут только деформировать ось и тело.
В обоих случаях одно из условий равновесия выполняется автоматически.
Отметим также, что необходимо, чтобы скорости всех точек тела в положении равновесия были равны нулю. Иначе тело будет с течением времени сдвигаться из положения равновесия.
В реальных условиях на любое тело действуют случайные внешние силы, которые отклоняют тело от положения равновесия. В новом положении условия равновесия нарушаются. Дальнейшее поведение тела зависит от того, в каком направлении действуют силы и моменты сил, возникающие при отклонении его от положения равновесия.
Дальнейшее поведение тела зависит от того, в каком направлении действуют силы и моменты сил, возникающие при отклонении его от положения равновесия.
Равновесие называется устойчивым, если при малом отклонении тела от положения равновесия возникают силы и моменты сил, возвращающие его в исходное положение равновесия (рис. 47). Примером подобного равновесия служит равновесие шарика в ямке.
Равновесие называется неустойчивым, если силы и моменты сил, возникающие при малом отклонении тела от положения равновесия, вызывают дальнейшее отклонение тела от положения равновесия и оно не возвращается в исходное положение равновесия (рис. 48). Примером подобного равновесия служит равновесие шарика на вершине сферической горки.
Равновесие называется безразличным, если при отклонении тела от положения равновесия равнодействующая сила и момент сил остаются равными нулю (рис. 49). В этом случае новое положение тела также служит положением безразличного равновесия.
Закон сохранения механической энергии:
полная механическая энергия консервативной физической системы является величиной постоянной:
Рассмотрим условия равновесия шарика (см. рис. 47—49) с точки зрения закона сохранения энергии. Если трением и сопротивлением воздуха можно пренебречь, то полная механическая энергия шарика должна сохраняться:
В любом из трех положений 1 шарик обладает только потенциальной энергией. Поэтому увеличение кинетической энергии возможно лишь за счет уменьшения потенциальной.
Это означает, что в положении 1 шарика на рисунке 47 потенциальная энергия убывать не может, так как во всех ближайших точках (например, рис. 47, 2) она была бы больше, чем в исходном положении. Поэтому шарик будет сохранять это положение — устойчивого равновесия.
В положении 1 шарика на рисунке 48 потенциальная энергия убывать не может, так как в ближайших точках (например, рис. 48, 2) она будет меньше, чем в исходной. Поэтому при малейшем внешнем воздействии она будет убывать, превращаясь в кинетическую. Следовательно, равновесие неустойчивое.
48, 2) она будет меньше, чем в исходной. Поэтому при малейшем внешнем воздействии она будет убывать, превращаясь в кинетическую. Следовательно, равновесие неустойчивое.
В положении 1 шарика на рисунке 49 потенциальная энергия убывать не может, так как во всех ближайших точках (например, рис. 49, 2) она ничем не отличается от начальной. Поэтому равновесие безразличное.
Пусть положению равновесия соответствует значение потенциальной энергии При перемещении шарика на расстояние в направлении х сила F совершает работу Эта работа совершается за счет уменьшения потенциальной энергии, т. е. В положении равновесия
действующая на тело сила должна быть равна нулю. Это означает, что в положении равновесия потенциальная энергия должна иметь либо максимум, либо минимум. Если возникающая при отклонении от положения равновесия сила направлена к положению равновесия (см. рис. 47), то при удалении тела от этого положения она совершает отрицательную работу. Потенциальная энергия возрастает.
Потенциальная энергия возрастает.
Следовательно, положению равновесия в этом случае соответствует минимум потенциальной энергии (рис. 50).
Если же возникающая сила направлена от положения равновесия (см. рис. 48), то при удалении тела от этого положения она совершает положительную работу и потенциальная энергия уменьшается. Следовательно, положению равновесия в этом случае соответствует максимум потенциальной энергии.
Таким образом, можно сформулировать следующие условия равновесия:
1. Равновесие устойчивое, если потенциальная энергия тела имеет минимальное из возможных ее значений:
2. Равновесие неустойчивое, если потенциальная энергия тела имеет максимальное из возможных ее значений:
3. Равновесие безразличное, если потенциальная энергия тела имеет постоянное значение в данном его положении и в возможных ближайших положениях, т. е. не зависит от положения тела:
е. не зависит от положения тела:
Отметим, что условие является общим условием устойчивости любой системы.
В общем, если система тел находится в равновесии и не получает энергию извне но тратит энергию, то движение в ней происходит так, что кинетическая энергия стремится к нулю а потенциальная — к возможному наименьшему значению до тех пор, пока система не придет в состояние устойчивого равновесия.
Отметим, что потенциальная энергия тела, находящегося в поле силы тяжести, определяется положением центра тяжести.
Центр тяжести тела — точка приложения равнодействующей сил тяжести, приложенных ко всем частям этого тела.
Центр масс тела — точка, через которую проходят линии действия сил, сообщающих телу ускоренное поступательное движение.
В однородном поле сил тяжести центр тяжести совпадает с центром масс. Минимуму потенциальной энергии и устойчивому положению равновесия со-
ответствует в этом случае самое низкое положение центра тяжести.
Общее условие устойчивого равновесия:
- центр тяжести тела, имеющего точку опоры, занимает самое низшее положение из всех возможных.
Этим условием удобно пользоваться при нахождении положения равновесия и исследовании характера равновесия.
Основные формулыМодуль равнодействующей двух сил:
где — угол между силами
Первый закон Ньютона (закон инерции):
Второй закон Ньютона (основной закон динамики):
Третий закон Ньютона:
Закон всемирного тяготения:
Закон Кулона—Амонтона:
Сила вязкого трения при малых скоростях: сила вязкого трения при больших скоростях:
Закон Гука:
Жесткость k:
Момент силы:
Первое условие равновесия:
Второе условие равновесия:
Ускорение свободного падения:
Гравитационная постоянная:
Скорость света в вакууме:
Методы решения физических задач по статике и динамике жидкостей и газов
«Историю цивилизации можно выразить
в шести словах; чем больше знаешь,
тем больше можешь».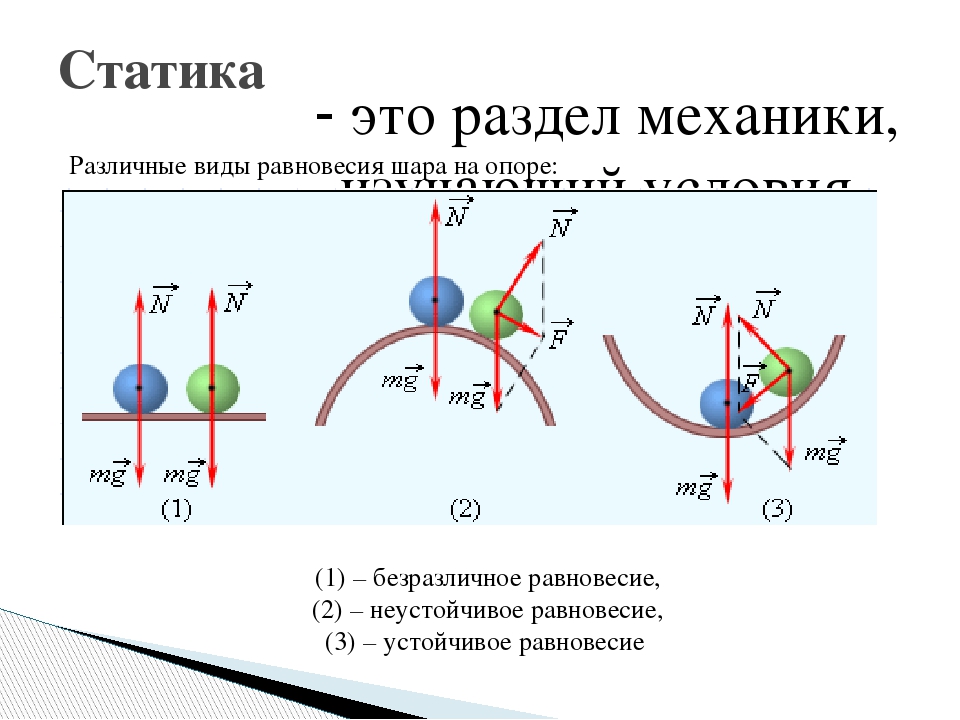
Э.Ф. Абу
В данной теме разговор пойдёт о статике и динамике жидкостей и газов, вспомним основные формулы, связанные с этим разделом физики, а также дадим некоторые рекомендации по решению задач на данную тему.
Гидро-(аэро)статика — это часть механики, изучающая условия равновесия жидкостей, а также тел, находящихся в жидкостях или газах.
Почему именно жидкости и газы присутствуют здесь наравне? Вспомните, что они имеют некоторые общие свойства. Во-первых, частицы жидкостей и газов обладают большой подвижностью, иными словами, жидкость и газ обладают текучестью. Ну а во-вторых, все жидкости и газы обладают весом.
Из первого свойства вытекает отсутствие у жидкостей и газов
своей собственной формы: они принимают форму того сосуда, в котором они
находятся. Исключением является состояние невесомости, в котором
жидкость под действием сил поверхностного натяжения принимает форму шара.
Из второго свойства вытекает существование давления, которое оказывает жидкость или газ на дно и стенки сосуда, в котором они заключены.
В механике жидкости и газы рассматриваются как сплошные, непрерывно распределенные в занятой ими части пространства, а во многих задачах сжимаемостью жидкости пренебрегают. Соответственно, в этом случае пользуются понятием несжимаемой жидкости — жидкости, плотность которой всюду одинакова и не изменяется со временем, то есть данная масса жидкости имеет определенный объем, а форма может быть любая.
Так как закономерности для жидкостей и газов общие, то их достаточно сформулировать для жидкостей.
Одним из важных понятий статики и динамики жидкости являются силы
давления. Силы давления — это силы, с которыми жидкость действует на
стенки сосуда, в котором она находится, на поверхность тела, помещенного в
жидкость, со стороны одного слоя жидкости на другой.
Они обладают рядом особенностей:
1) по своей природе — это силы упругости сжатых жидкостей.
2) силы давления, благодаря своей текучести, всегда перпендикулярны поверхности, на которую они действуют, независимо от формы этой поверхности.
3) так как силы давления распределены по всей поверхности соприкосновения твердого тела с жидкостью, то они зависят от размеров этой поверхности.
Силовое взаимодействие в жидкости характеризуется скалярной величиной — давлением. Давление— физическая величина, измеряемая отношением силы давления, действующей на поверхность, к площади поверхности.
p = F/S
Следовательно, давление есть не что иное, как сила давления,
приходящаяся на единицу площади. Напомним, что единицей давления в системе
СИ являет Паскаль.
Для жидкостей и газов справедлив закон, установленный опытным путем французским физиком Блезом Паскалем и ныне носящим его имя: и так, жидкость (или газ) передает производимое на нее поверхностными силами внешнее давление по всем направлениям без изменения.
На законе Паскаля основано действие такого простого механизма, как гидравлический пресс. Он представляет собой два сообщающихся сосуда, заполненных жидкостью (обычно это техническое масло) и закрытых подвижными поршнями различной площади.
При воздействии на малый поршень некоторой внешней силой, жидкость начинает передавать производимое на нее давление по всем направлениям, в том числе и на большой поршень. При этом сила, действующая на большой поршень, будет во столько раз больше внешней силы, во сколько раз площадь большого поршня превышает площадь малого поршня.
Однако, как и любой простой механизм, гидравлический пресс
никакого выигрыша в работе не дает.
Т.к. жидкости обладают весом, то они способны создавать давление на дно и стенки сосуда, в котором они находятся. Давление, обусловленное весом жидкости, называется гидростатическим давлением.
Следует научиться различать два выражения: «Давление жидкости на глубине» и «Давление в жидкости на глубине». «Давление жидкости на глубине» — это и есть гидростатическое давление жидкости.
А вот вторая фраза подразумевает учет дополнительного давления, которое может действовать над свободной поверхностью жидкости (например, это может быть атмосферное давление).
Силу давления жидкости на горизонтальное дно можно рассчитать по формуле
Для расчета силы давления на боковую прямоугольную вертикальную стенку можно применяется формула
Существование гидростатического давления приводит к тому, что
на любое тело, находящееся в жидкости или газе, действует выталкивающая сила.
Согласно закону Архимеда, эта сила равна весу жидкости (газа) в объеме погруженной части тела, направлена она вертикально вверх и приложена в центре давления.
Таким образом, на тело, находящееся в жидкости или газе, действуют две противоположно направленные силы: вертикально вниз — сила тяжести, и вертикально вверх — архимедова сила. В зависимости от соотношения этих сил, тело, находящееся в жидкости, может вести себя по-разному. Всего возможны три случая.
Если архимедова сила будет больше силы тяжести, то
равнодействующая этих сил будет направлена вверх, и тело начнет всплывать. И
пока тело не достигнет свободной поверхности жидкости, выталкивающая сила не
будет изменяться. При дальнейшем подъеме выталкивающая сила начнет уменьшаться
и, когда она станет равной по модулю силе тяжести, тело остановится, и будет
плавать на поверхности жидкости, частично в нее погрузившись.
Если сила тяжести будет равна по модулю архимедовой силе, то тело будет плавать внутри жидкости на любой глубине (это, так называемое, безразличное равновесие).
Если значение архимедовой силы будет меньше действующей силы тяжести, то их равнодействующая будет направлена вниз, в результате чего тело тонет.
Рассмотрим сообщающиеся сосуды – это сосуды, соединенные ниже поверхности жидкости, так что жидкость может перетекать из одного сосуда в другой.
Из условия равновесия жидкости вытекает закон сообщающихся сосудов: однородная жидкость устанавливается в неподвижных сообщающихся сосудах так, что давление во всех точках, расположенных в одной горизонтальной плоскости, одинаково.
Если в неподвижных сообщающихся сосудах находится однородная жидкость, то ее свободная поверхности устанавливается на одном уровне.
Если налиты две несмешивающихся жидкости, то высоты
столбов над уровнем раздела обратно пропорциональны плотностям этих жидкостей.
Сведём в таблицу основные формулы статики и динамики жидкостей и газов.
|
Формула |
Описание формулы |
|
Давление, где F — сила давления, S – площадь. |
|
|
Соотношение сил в гидравлическом прессе, где F1 – сила, действующая на малый поршень, F2 – сила, действующая на большой поршень, S1 и S2 — площади поршней. |
|
|
Гидростатическое давление, где r – плотность жидкости, h – высота столба жидкости. |
|
|
Полное
давление в любой точке жидкости, где p0
–давление на её свободной поверхности. |
|
|
Сила давления жидкости на дно сосуда, где Sд — площадь дна. |
|
|
Сила давления жидкости на прямоугольную вертикальную стенку сосуда, где Sст – площадь стенки. |
|
|
Закон Архимеда, FА – выталкивающая сила, rж – плотность жидкости, VТ – объём тела. |
|
|
Условие несжимаемости жидкости, где V1 и V2 – объемы порций жидкостей, перетекающих из одного сосуда в другой. |
|
|
Закон
сообщающихся сосудов, где суммы
давлений столбов жидкостей, находящихся над нулевым уровнем над поверхностью,
проходящей через самую нижнюю границу раздела жидкости соответственно в i-том и k-том сосудах. |
|
|
Уравнение Бернулли, где p – статическое давление, rv2/2 – динамическое давление, rgh – гидростатическое давление. |
Методические рекомендации по решению задач на статику жидкостей и газов.
1. Сделать чертеж и отметить все равновесные уровни жидкости, которые она занимала по условию задачи, указать границы раздела жидкостей, если их несколько, и высоты столбов жидкостей. В случае сообщающихся сосудов нужно выбрать горизонтальный уровень в однородной жидкости (обычно самую нижнюю границу раздела сред).
2. Составить уравнение равновесия жидкости для двух произвольных точек, лежащих на выбранном горизонтальном уровне.
3. Если до наступления равновесия жид-кость переливалась из
одной части сосуда в другую, то нужно записать условие несжимаемости жидкости: V1= V2.
4. Записать дополнительные формулы, связывающие искомые величины и данные по условию задачи.
5. Решить полученную систему уравнений относительно искомой величины. Проверить правило размерностей и проанализировать полученный результат.
Методические рекомендации по решению задач на динамику жидкостей и газов.
1. Сделать чертеж и указать силы, действующие на тело, погруженное в жидкость.
2. Составить основное уравнение динамики, а иногда и уравнение моментов.
3. Если тело плавает на границе раздела 2-ух жидкостей, выталкивающая сила, действующая на тело, равна
4. Составить дополнительные уравнения согласно условию задачи. Решить полученную систему относительно искомой величины.
Формулы по физике пригодятся егэ. Формулы по физике, которые рекомендуется выучить и хорошо освоить для успешной сдачи ЕГЭ
Размер: px
Начинать показ со страницы:
Транскрипт1
Формулы по физике, которые рекомендуется выучить и хорошо освоить для успешной сдачи ЕГЭ.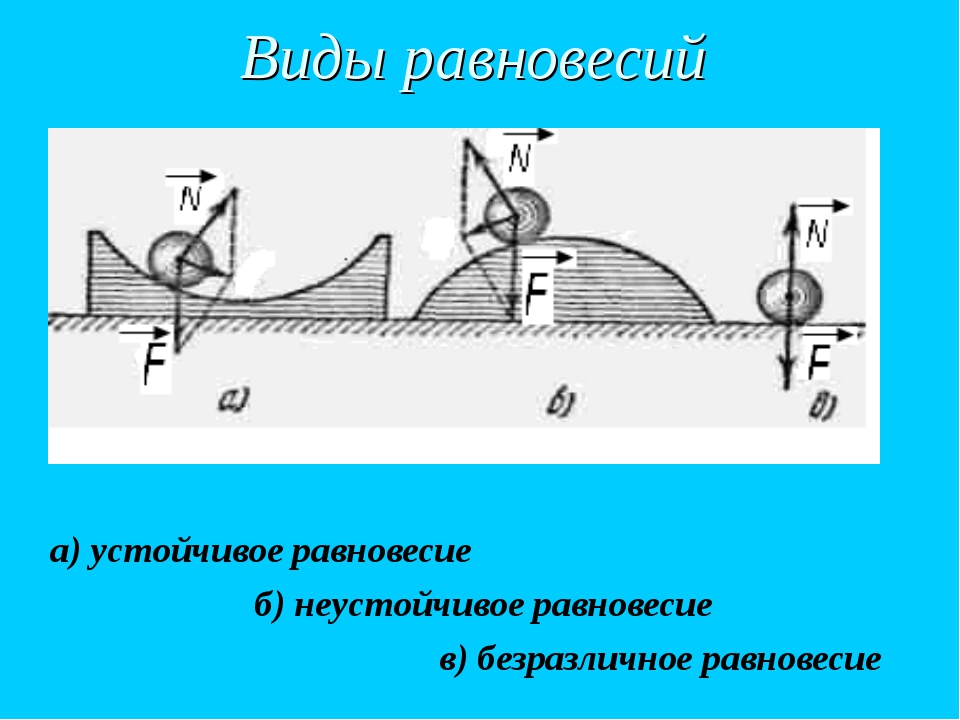 Версия: 0.92 β. Составитель: Ваулин Д.Н. Литература: 1. Пёрышкин А.В. Физика 7 класс. Учебник для общеобразовательных учреждений. 13-е издание, стереотипное. Москва. Дрофа Пёрышкин А.В. Физика 8 класс. Учебник для общеобразовательных учреждений. 12-е издание, стереотипное. Москва. Дрофа Пёрышкин А.В., Гутник Е.М. Физика 9 класс. Учебник для общеобразовательных учреждений. 14-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я. и др. Физика. Механика 10 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 11-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Молекулярная физика. Термодинамика 10 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 13-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З., Слободсков Б.А. Физика. Электродинамика классы. Профильный уровень. Учебник для общеобразовательных учреждений. 11-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Колебания и волны 11 класс. Профильный уровень.
Версия: 0.92 β. Составитель: Ваулин Д.Н. Литература: 1. Пёрышкин А.В. Физика 7 класс. Учебник для общеобразовательных учреждений. 13-е издание, стереотипное. Москва. Дрофа Пёрышкин А.В. Физика 8 класс. Учебник для общеобразовательных учреждений. 12-е издание, стереотипное. Москва. Дрофа Пёрышкин А.В., Гутник Е.М. Физика 9 класс. Учебник для общеобразовательных учреждений. 14-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я. и др. Физика. Механика 10 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 11-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Молекулярная физика. Термодинамика 10 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 13-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З., Слободсков Б.А. Физика. Электродинамика классы. Профильный уровень. Учебник для общеобразовательных учреждений. 11-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Колебания и волны 11 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 9-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Оптика. Квантовая физика 11 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 9-е издание, стереотипное. Москва. Дрофа Жирным выделены формулы, которые стоит учить, когда уже отлично освоены не выделенные жирным формулы. 7 класс. 1. Средняя скорость: 2. Плотность: 3. Закон Гука: 4. Сила тяжести:
Учебник для общеобразовательных учреждений. 9-е издание, стереотипное. Москва. Дрофа Мякишев Г.Я., Синяков А.З. Физика. Оптика. Квантовая физика 11 класс. Профильный уровень. Учебник для общеобразовательных учреждений. 9-е издание, стереотипное. Москва. Дрофа Жирным выделены формулы, которые стоит учить, когда уже отлично освоены не выделенные жирным формулы. 7 класс. 1. Средняя скорость: 2. Плотность: 3. Закон Гука: 4. Сила тяжести:
2 5. Давление: 6. Давление столба жидкости: 7. Архимедова сила: 8. Механическая работа: 9. Мощность совершения работы: 10. Момент силы: 11. Коэффициент полезного действия (КПД) механизма: 12. Потенциальная энергия при постоянном: 13. Кинетическая энергия: 8 класс. 14. Количество теплоты необходимое для нагревания: 15. Количество теплоты, выделяемое при сгорании: 16. Количество теплоты необходимое для плавления:
3
17. Относительная влажность воздуха: 18. Количество теплоты необходимое для парообразования: 19. КПД теплового двигателя: 20. Полезная работа теплового двигателя: 21. Закон сохранения заряда: 22. Сила тока: 23. Напряжение: 24. Сопротивление: 25. Общее сопротивление последовательного соединения проводников: 26. Общее сопротивление параллельного соединения проводников: 27. Закон Ома для участка цепи:
Закон сохранения заряда: 22. Сила тока: 23. Напряжение: 24. Сопротивление: 25. Общее сопротивление последовательного соединения проводников: 26. Общее сопротивление параллельного соединения проводников: 27. Закон Ома для участка цепи:
4 28. Мощность электрического тока: 29. Закон Джоуля-Ленца: 30. Закон отражения света: 31. Закон преломления света: 32. Оптическая сила линзы: 9 класс. 33. Зависимость скорости от времени при равноускоренном движении: 34. Зависимость радиус вектора от времени при равноускоренном движении: 35. Второй закон Ньютона: 36. Третий закон Ньютона: 37. Закон всемирного тяготения:
5 38. Центростремительное ускорение: 39. Импульс: 40. Закон изменения энергии: 41. Связь периода и частоты: 42. Связь длинны волны и частоты: 43. Закон изменения импульса: 44. Закон Ампера: 45. Энергия магнитного поля тока: 46. Формула трансформатора: 47. Действующее значение тока: 48. Действующее значение напряжения:
6
49. Заряд конденсатора: 50. Электроёмкость плоского конденсатора: 51. Общая ёмкость параллельно соединённых конденсаторов: 52. Энергия электрического поля конденсатора: 53. Формула Томпсона: 54. Энергия фотона: 55. Поглощение фотона атомом: 56. Связь массы и энергии: 1. Поглощённая доза излучения: 2. Эквивалентная доза излучения:
Общая ёмкость параллельно соединённых конденсаторов: 52. Энергия электрического поля конденсатора: 53. Формула Томпсона: 54. Энергия фотона: 55. Поглощение фотона атомом: 56. Связь массы и энергии: 1. Поглощённая доза излучения: 2. Эквивалентная доза излучения:
7 57. Закон радиоактивного распада: 10 класс. 58. Угловая скорость: 59. Связь скорости с угловой: 60. Закон сложения скоростей: 61. Сила трения скольжения: 62. Сила трения покоя: 3. Сила сопротивления среды: [ 63. Потенциальная энергия растянутой пружины: 4. Радиус вектор центра масс:
8 64. Количество вещества: 65. Уравнение Менделеева-Клапейрона: 66. Основное уравнение молекулярно кинетической теории: 67. Концентрация частиц: 68. Связь между средней кинетической энергией частиц и температурой газа: 69. Внутренняя энергия газа: 70. Работа газа: 71. Первое начало термодинамики: 72. КПД машины Карно: 5. Тепловое линейное расширение: 6. Тепловое объёмное расширение:
9
73. Закон Кулона: 74. Напряжённость электрического поля: 75.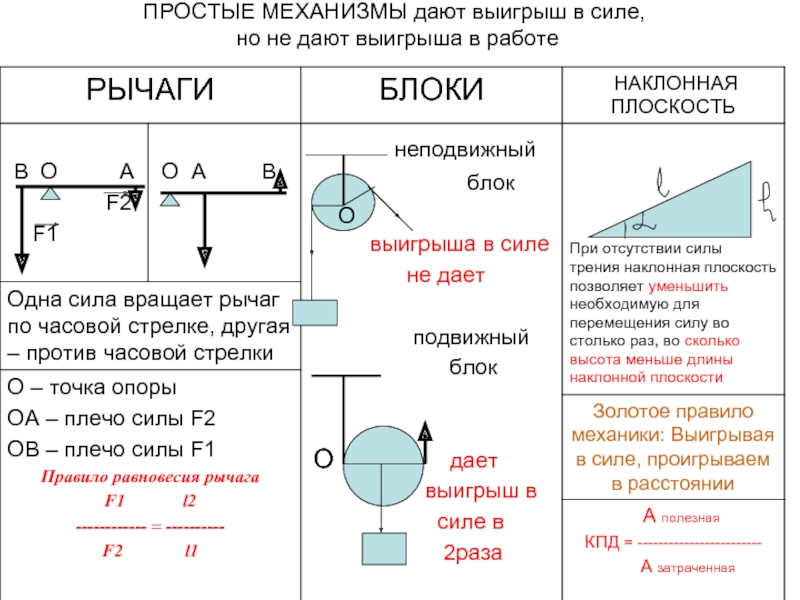 Напряжённость электрического поля точечного заряда: 7. Поток напряжённости электрического поля: 8. Теорема Гаусса: 76. Потенциальная энергия заряда при постоянном: 77. Потенциальная энергия взаимодействия тел: 78. Потенциальная энергия взаимодействия зарядов: 79. Потенциал: 80. Разность потенциалов: 81. Связь напряжённости однородного электрического поля и напряжения:
Напряжённость электрического поля точечного заряда: 7. Поток напряжённости электрического поля: 8. Теорема Гаусса: 76. Потенциальная энергия заряда при постоянном: 77. Потенциальная энергия взаимодействия тел: 78. Потенциальная энергия взаимодействия зарядов: 79. Потенциал: 80. Разность потенциалов: 81. Связь напряжённости однородного электрического поля и напряжения:
10 82. Общая электроёмкость последовательно соединённых конденсаторов: 83. Зависимость удельного сопротивления от температуры: 84. Первое правило Кирхгофа: 85. Закон Ома для полной цепи: 86. Второе правило Кирхгофа: 87. Закон Фарадея: 11 класс. 9. Закон Био-Савара-Лапласа: 10. Магнитная индукция бесконечного провода: 88. Сила Лоренца:
11
89. Магнитный поток: 90. Закон электромагнитной индукции: 91. Индуктивность: 92. Зависимость величины, изменяющейся по гармоническому закону от времени: 93. Зависимость скорости изменения величины, изменяющейся по гармоническому закону от времени: 94. Зависимость ускорения изменения величины, изменяющейся по гармоническому закону от времени: 95. Период колебаний нитяного маятника: 96. Период колебаний пружинного маятника: 11. Емкостное сопротивление: 12. Индуктивное сопротивление:
Период колебаний нитяного маятника: 96. Период колебаний пружинного маятника: 11. Емкостное сопротивление: 12. Индуктивное сопротивление:
12 13. Сопротивление для переменного тока: 97. Формула тонкой линзы: 98. Условие интерференционного максимума: 99. Условие интерференционного минимума: 14. Преобразования Лоренца координат: 15. Преобразования Лоренца времени: 16. Релятивистский закон сложения скоростей: 100. Зависимость массы тела от скорости: 17. Релятивистская связь между энергией и импульсом:
13 101. Уравнение фотоэффекта: 102. Красная граница фотоэффекта: 103. Длина волны Де Бройля:
Н.Е.Савченко ЗАДАЧИ ПО ФИЗИКЕ С АНАЛИЗОМ ИХ РЕШЕНИЯ В книге дана методика решения задач но физике с анализом типичных ошибок, допускаемых абитуриентами на вступительных экзаменах. Сборник рекомендуется
Аннотация к рабочей программе по физике.7-9 классы. Рабочая программа разработана на основе: 1. Примерной программы среднего общего образования по физике. 2. Программы основного общего образования по физике
2. Программы основного общего образования по физике
ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Государственный университет морского и речного
12.5.13. Физика Механические явления распознавать механические явления и объяснять на основе имеющихся знаний основные свойства или условия протекания этих явлений: равномерное и равноускоренное прямолинейное
АННОТАЦИЯ К РАБОЧЕЙ ПРОГРАММЕ УЧЕБНОЙ ДИСЦИПЛИНЫ «ФИЗИКА» (ПРОФИЛЬНЫЙ УРОВЕНЬ) Рабочая программа по математике составлена на основе федерального компонента государственного стандарта среднего (полного)
Рассмотрено на заседании МО Согласовано Утверждаю учителей математики и физики Зам. Директора по УВР Директор МБОУ СОШ с.ключи /Камалтдинова З.З./ /Селянина Ф.Ф./ /Селянина З.Р/ 2011 г. 2011 г. Приказ
2 Составитель: Куцов А.М., доцент кафедры естественнонаучных дисциплин, канд. геол.-минерал. наук Утверждена на заседании кафедры естественнонаучных дисциплин 03.02.2014 г., протокол 3 3 1. ПОЯСНИТЕЛЬНАЯ
геол.-минерал. наук Утверждена на заседании кафедры естественнонаучных дисциплин 03.02.2014 г., протокол 3 3 1. ПОЯСНИТЕЛЬНАЯ
Рабочая программа учебной дисциплины разработана на основе Федерального государственного образовательного стандарта (далее ФГОС) по специальности среднего профессионального образования 600«Технология молока
Министерство образования и науки Российской Федерации Федеральный институт развития образования ПРИМЕРНАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ ФИЗИКА для профессий начального профессионального образования и специальностей
2 3 ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Программа учебной дисциплины «Физика» предназначена для изучения физики в учреждениях среднего профессионального образования, реализующих образовательную программу среднего (полного)
ПЛАНИРУЕМ УЧЕБНУЮ ДЕЯТЕЛЬНОСТЬ ПОДГОТОВКА К ЕГЭ. 11 класс ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Базовый уровень изучения физики не рассчитан на подготовку учащихся к продолжению образования в вузах физико-технического
Муниципальное бюджетное общеобразовательное учреждение «Гатчинская средняя общеобразовательная школа 1» Приложение к образовательной программе среднего общего образования, утверждѐнной Приказом 80 от
Рабочая программа по предмету ФИЗИКА 0- классы (базовый уровень) Пояснительная записка Рабочая программа по физике составлена на основе федерального компонента государственного образовательного стандарта
Министерство образования и науки Государственное бюджетное профессиональное образовательное учреждение Республики Хакасия «Профессиональное училище 15» с. Бея РАССМОТРЕНО на заседании МО ОД (протокол от
Бея РАССМОТРЕНО на заседании МО ОД (протокол от
2.Пояснительная записка. Программа соответствует Федеральному компоненту государственного стандарта основного общего образования по физике (приказ Минобразования России от 05.03.2004 1089 «Об утверждении
РАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ ФИЗИКА (ПД.02) для специальности среднего профессионального образования 23.02.01 «Организация перевозок и управление на транспорте (по видам)»
Аннотация к рабочим программам по физике 10-11 класс 10 класс Рабочая программа по физике для учащихся 10 класса (профильного уровня) составлена на основе примерной программы среднего (полного) общего
3-7. На шелковых нитях длиной 50 см каждая, прикрепленных к одной точке, висят два одинаково заряженных шарика массой по 0,2 г каждый. Определить заряд каждого шарика, если они отошли друг от друга на
Формулы по физике для школьника сдающего ГИА по ФИЗИК (9 класс) Кинематика Линейная скорость [м/с]: L путевая: П средняя: мгновенная: () в проекции на ось Х: () () где _ Х x x направление: касательная
Рабочая программа по физике 11 класс (2 часа) 2013-2014 учебный год Пояснительная записка Рабочая общеобразовательная программа «Физика. 11 класс. Базовый уровень» составлена на основе Примерной программы
11 класс. Базовый уровень» составлена на основе Примерной программы
ЭЛЕКТРОСТАТИКА 1. Два рода электрических зарядов, их свойства. Способы зарядки тел. Наименьший неделимый электрический заряд. Единица электрического заряда. Закон сохранения электрических зарядов. Электростатика.
РАБОЧАЯ ПРОГРАММА ПО ФИЗИКЕ 11 КЛАСС (базовый уровень) 4 ЭЛЕКТРОДИНАМИКА 35 часов 4.1 Элементарный электрический заряд. 1 Знать: 4.2 Закон сохранения электрического заряда Закон Кулона 1 понятия: электрический
Программа элективного курса по физике класс. «Методы решения задач по физике повышенной сложности, класс» ч., час в неделю Составитель: Шмидт Е.Ф., учитель физики первой категории МОУ «Сосновская СОШ»
Пояснительная записка Рабочая программа по физике для 0- класса составлена на основе Программы общеобразовательных учреждений по физике для 0- классов, авторы программы П. Г. Саенко, В.С. Данюшенков, О.В.
Рабочая программа по физике составлена на основе федерального компонента государственного стандарта основного общего образования. Данная рабочая программа ориентирована на учащихся 11 класса и реализуется
Данная рабочая программа ориентирована на учащихся 11 класса и реализуется
Учебно-методический комплекс (УМК) Физика Аннотация к рабочей программе 7 класса А.В.Пѐрышкин. Физика 7 класс. Москва. Дрофа.2012г. А.В.Пѐрышкин. Сборник задач по физике 7-9. Москва Экзамен.2015 Учебный
Муниципальное автономное общеобразовательное учреждение лицей 102 г. Челябинска Рассмотрено на заседании НМС МАОУ лицея 102 2014 г. УТВЕРЖДАЮ директор МАОУ лицея 102 М.Л. Оксенчук 2014 г. РАБОЧАЯ ПРОГРАММА
ПРОГРАММА ВСТУПИТЕЛЬНЫХ ИСПЫТАНИЙ ПО ФИЗИКЕ Настоящая программа составлена на основе действующих учебных программ для общеобразовательных учебных заведений. 1.1. Кинематика 1. МЕХАНИКА Механическое движение.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Рабочая программа по физике составлена на основе примерной программы среднего (полного) общего образования по физике базового уровня и соответствует федеральному государственному
Пояснительная записка Программа составлена в соответствии с:. Законом об образовании от 29.2.202 273-ФЗ «Закон об образовании в РФ»; 2. примерной программой среднего общего образования по физике. 0- классы.,
Законом об образовании от 29.2.202 273-ФЗ «Закон об образовании в РФ»; 2. примерной программой среднего общего образования по физике. 0- классы.,
«Согласовано» «Согласовано» на заседании методического объединения учителей Директор ГБОУ ОСОШ 88 биологии, физики, химии Маслова В.М. Протокол от 201 г. 201 г Руководитель МО учителей биологии, физики,
Муниципальное бюджетное общеобразовательное учреждение «Школа 41 «Гармония» с углубленным изучением отдельных предметов» городского округа Самара РАБОЧАЯ ПРОГРАММА Предмет физика Класс 9 Количество часов
Муниципальное бюджетное общеобразовательное учреждение гимназия 5 г. Ставрополя Рассмотрено: на заседании МО учителей естественных дисциплин МБОУ гимназии 5 Протокол 1 от «9» августа 014 г Согласовано:
Лицей автономной некоммерческой организации высшего профессионального образования академии «МЕЖДУНАРОДНЫЙ УНИВЕРСИТЕТ В МОСКВЕ» «СОГЛАСОВАНО» «УТВЕРЖДАЮ» Руководитель МО Директор Лицея Полунина О.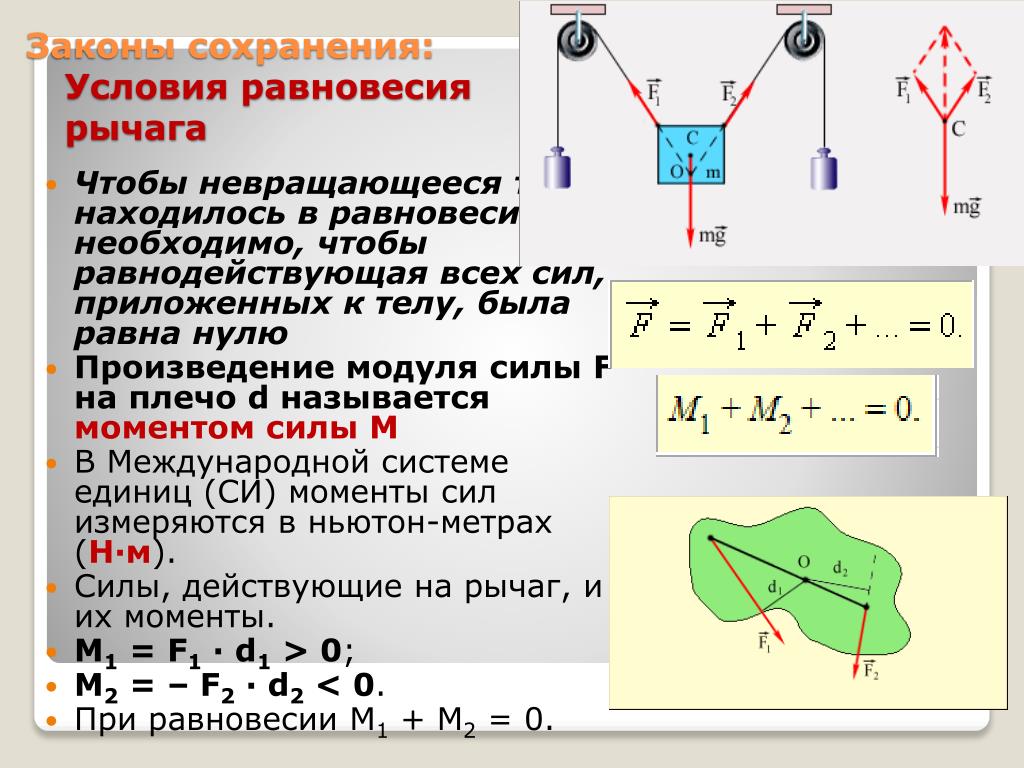 В. 201
В. 201
УТВЕРЖДАЮ Ректор ФГБОУ ВПО «МГУДТ» В.С.Белгородский 2015г. МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего профессионального
Приложение 5 Соответствие сроков прохождения тем по физике этапам Всероссийской олимпиады Комплекты заданий различных этапов олимпиад составляются по принципу «накопленного итога» и могут включать как
Инструктивно-методическое письмо о преподавании физики в 2015/16 учебном году Документы, необходимые для реализации учебного процесса по физике основного и среднего образования, а также в профильных классах:
ПРОГРАММА ПО ФИЗИКЕ Программа составлена на базе обязательного минимума содержания среднего (полного) общего образования. Экзаменационные задания по физике не выходят за рамки данной программы, но требуют
«Физика. 10 класс» и «Физика. 11 класс» базовый уровень стр.1 из 17 МОУ Киришская средняя общеобразовательная школа 8 Согласовано заместитель директора по УВР, Е. А. Королева «01» сентября 2014 г. Утверждена
А. Королева «01» сентября 2014 г. Утверждена
РАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ ОДБ.08 ФИЗИКА 2013 г Рабочая программа учебной дисциплины разработана на основе Федерального государственного образовательного стандарта (далее ФГОС) по профессии начального
Управление образования АМО ГО «Сыктывкар» Муниципальное общеобразовательное учреждение «Средняя общеобразовательная школа 9» (МОУ «СОШ 9») «9 -а Шӧр школа» муниципальнӧй велӧдан учреждение 02-01 Рекомендовано
Министерство физической культуры, спорта и молодежной политики Свердловской области Государственное автономное образовательное учреждение Среднего профессионального образования Свердловской области «Училище
Департамент образования и науки Кемеровской области Государственное образовательное учреждение среднего профессионального образования «Кемеровский коммунально-строительный техникум» имени В.И. Заузёлкова
Муниципальное бюджетное образовательное учреждение «Школа 13» города Сарова РАССМОТРЕНА на заседании школьного методического объединения учителей естественнонаучного цикла Протокол 1 от 29. 08.2016 СОГЛАСОВАНА
08.2016 СОГЛАСОВАНА
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Национальный минерально-сырьевой университет
РАБОЧАЯ ПРОГРАММА ПО ФИЗИКЕ 0 КЛАСС БАЗОВЫЙ УРОВЕНЬ ПО УЧЕБНИКУ Г.Я.МЯКИШЕВ, Б.Б.БУХОВЦЕВ (36 часов 2 часа в неделю). ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Рабочая программа составлена на основе Федерального компонента
Средняя общеобразовательная школа с углубленным изучением иностранного языка при Посольстве России в Великобритании СОГЛАСОВАНО на заседании МС (Зубов С.Ю.) «10» сентября 2014 УТВЕРЖДАЮ директор школы
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «ДАГЕСТАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» «УТВЕРЖДАЮ» Ректор
Министерство образования и науки Челябинской области ГОУ СПО «Троицкий педагогический колледж» Рабочая программа учебной дисциплины ОДБ. 11 Физика по специальности 050146 Преподавание в начальных классах
11 Физика по специальности 050146 Преподавание в начальных классах
Экзамен в 8 классе общеобразовательной школы включает в себя проверку знаний теоретических (1 вопрос) и практических в виде навыков решения задач (1 задача). На экзамене можно пользоваться линейкой и калькулятором.
Муниципальное общеобразовательное учреждение «Средняя общеобразовательная школа 14» г. Воркуты РАССМОТРЕНА школьным методическим объединением учителей естественно-математического цикла Протокол 1 от 30.08.2013
Государственное бюджетное общеобразовательное учреждение средняя общеобразовательная школа 18 с углубленным изучением математики Василеостровского района Санкт-Петербурга РАССМОТРЕНО на заседании МО протокол
Пояснительная записка При составлении программы были использованы следующие правовые документы федеральный компонент государственного стандарта среднего (полного) общего образования по физике, утвержденный
Автономное профессиональное образовательное учреждение Удмуртской Республики «Ижевский промышленно-экономический колледж» Учебно-программная документация ФИЗИКА (профильный уровень) РП.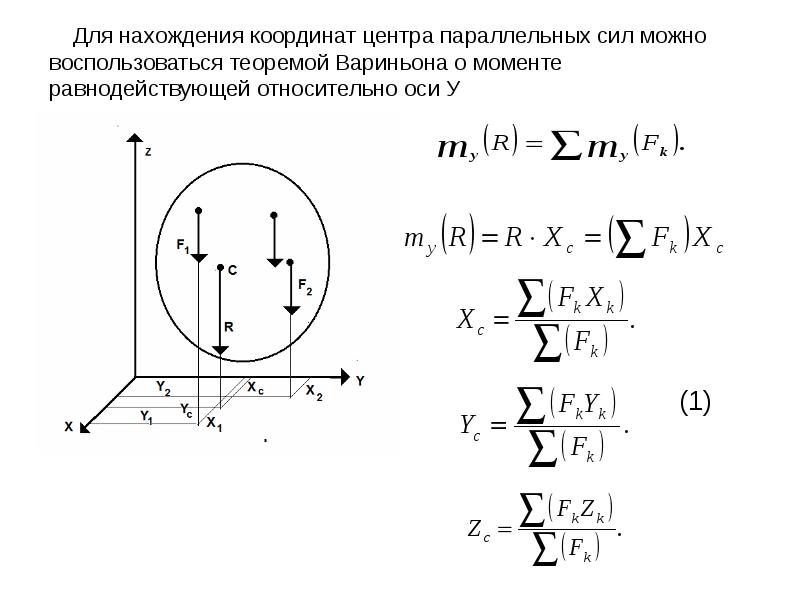 ОДП.16.СПО-01-2014
ОДП.16.СПО-01-2014
Муниципальное общеобразовательное учреждение «Средняя общеобразовательная школа 39 имени Георгия Александровича Чернова» г.воркуты Рассмотрена на заседании ШМО учителей математики, физики и информатики
Аннотация к рабочей программе по предмету «Физика» 10-11 класс 10 класс Рабочая программа предназначена для работы в 10 классе общеобразовательной школы и составлена на основе: – федерального компонента
Анатация Рабочая программа учебной дисциплины «Физика» предназначена для изучения физики в учреждениях начального и среднего профессионального образования, реализующих образовательную программу среднего
II четверть 2.1. Название Основы динамики. Основные законы механики – законы Ньютона. НА УЧЕБНЫЙ ПЕРИОД 2015-2020 Сформировать понятия силы как количественной характеристики взаимодействия тел. Изучить
СОДЕРЖАНИЕ. Пояснительная записка 3 2. Содержание учебной программы 5 3. График практической части рабочей программы. 0 4. Календарно-тематический план…6 5. Список литературы для учащихся..33 6. Список
0 4. Календарно-тематический план…6 5. Список литературы для учащихся..33 6. Список
II четверть 2.1. Название Изменение агрегатных состояний вещества. НА УЧЕБНЫЙ ПЕРИОД 2015-2020 Продолжить формирование представлений о внутренней энергии. Изучить формулу для расчета количества теплоты,
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ УЧЕБНЫЕ ПРОГРАММЫ ДЛЯ УЧРЕЖДЕНИЙ ОБЩЕГО СРЕДНЕГО ОБРАЗОВАНИЯ С РУССКИМ ЯЗЫКОМ ОБУЧЕНИЯ ФИЗИКА VI XI классы АСТРОНОМИЯ XI класс Утверждено Министерством образования
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Забайкальский государственный университет»
СИБИРСКИЙ УНИВЕРСИТЕТ ПОТРЕБИТЕЛЬСКОЙ КООПЕРАЦИИ ПРОГРАММА ВСТУПИТЕЛЬНЫХ ИСПЫТАНИЙ ПО ПРЕДМЕТУ ФИЗИКА Новосибирск ВВЕДЕНИЕ Программа вступительного испытания по предмету физика составлена с учётом требований
1. ФИЗИКА 2. Кинематика. Система отсчета. Способы описания положения точки. Характеристики движения точки при различных способах описания положения. Уравнения движения. Кинематические сложения движений
Система отсчета. Способы описания положения точки. Характеристики движения точки при различных способах описания положения. Уравнения движения. Кинематические сложения движений
Тур 1 Вариант 1 1. Точка движется по оси х по закону х = 8 + 12t – 3t 2 (м). Определите величину скорости точки при t = 1 с. 2. Тело массой m = 1 кг движется по горизонтальной поверхности под действием
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Башантинский аграрный колледж им. Ф.Г. Попова (филиал) ГОУ ВПО «КАЛМЫЦКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» РАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ Физика
Государственное бюджетное общеобразовательное учреждение средняя общеобразовательная школа 13 с углубленным изучением английского языка Невского района Санкт-Петербурга Аннотация к рабочей программе по
Шпаргалка с формулами по физике для ЕГЭ
Шпаргалка с формулами по физике для ЕГЭ
И не только (может понадобиться 7, 8, 9, 10 и 11 классам). Для начала картинка, которую можно распечатать в компактном виде.
И не только (может понадобиться 7, 8, 9, 10 и 11 классам). Для начала картинка, которую можно распечатать в компактном виде.
Шпаргалка с формулами по физике для ЕГЭ и не только (может понадобиться 7, 8, 9, 10 и 11 классам).
и не только (может понадобиться 7, 8, 9, 10 и 11 классам).
А потом вордовский файл , который содержит все формулы чтобы их распечатать, которые находятся внизу статьи.
Механика
- Давление Р=F/S
- Плотность ρ=m/V
- Давление на глубине жидкости P=ρ∙g∙h
- Сила тяжести Fт=mg
- 5. Архимедова сила Fa=ρ ж ∙g∙Vт
- Уравнение движения при равноускоренном движении
X=X 0 +υ 0 ∙t+(a∙t 2)/2 S=(υ 2 –υ 0 2) /2а S=(υ +υ 0) ∙t /2
- Уравнение скорости при равноускоренном движении υ =υ 0 +a∙t
- Ускорение a=(υ –υ 0)/t
- Скорость при движении по окружности υ =2πR/Т
- Центростремительное ускорение a=υ 2 /R
- Связь периода с частотой ν=1/T=ω/2π
- II закон Ньютона F=ma
- Закон Гука Fy=-kx
- Закон Всемирного тяготения F=G∙M∙m/R 2
- Вес тела, движущегося с ускорением а Р=m(g+a)
- Вес тела, движущегося с ускорением а↓ Р=m(g-a)
- Сила трения Fтр=µN
- Импульс тела p=mυ
- Импульс силы Ft=∆p
- Момент силы M=F∙ℓ
- Потенциальная энергия тела, поднятого над землей Eп=mgh
- Потенциальная энергия упруго деформированного тела Eп=kx 2 /2
- Кинетическая энергия тела Ek=mυ 2 /2
- Работа A=F∙S∙cosα
- Мощность N=A/t=F∙υ
- Коэффициент полезного действия η=Aп/Аз
- Период колебаний математического маятника T=2π√ℓ/g
- Период колебаний пружинного маятника T=2 π √m/k
- Уравнение гармонических колебаний Х=Хmax∙cos ωt
- Связь длины волны, ее скорости и периода λ= υ Т
Молекулярная физика и термодинамика
- Количество вещества ν=N/ Na
- Молярная масса М=m/ν
- Cр.
 кин. энергия молекул одноатомного газа Ek=3/2∙kT
кин. энергия молекул одноатомного газа Ek=3/2∙kT - Основное уравнение МКТ P=nkT=1/3nm 0 υ 2
- Закон Гей – Люссака (изобарный процесс) V/T =const
- Закон Шарля (изохорный процесс) P/T =const
- Относительная влажность φ=P/P 0 ∙100%
- Внутр. энергия идеал. одноатомного газа U=3/2∙M/µ∙RT
- Работа газа A=P∙ΔV
- Закон Бойля – Мариотта (изотермический процесс) PV=const
- Количество теплоты при нагревании Q=Cm(T 2 -T 1)
- Количество теплоты при плавлении Q=λm
- Количество теплоты при парообразовании Q=Lm
- Количество теплоты при сгорании топлива Q=qm
- Уравнение состояния идеального газа PV=m/M∙RT
- Первый закон термодинамики ΔU=A+Q
- КПД тепловых двигателей η= (Q 1 – Q 2)/ Q 1
- КПД идеал. двигателей (цикл Карно) η= (Т 1 – Т 2)/ Т 1
Электростатика и электродинамика – формулы по физике
- Закон Кулона F=k∙q 1 ∙q 2 /R 2
- Напряженность электрического поля E=F/q
- Напряженность эл.
 поля точечного заряда E=k∙q/R 2
поля точечного заряда E=k∙q/R 2 - Поверхностная плотность зарядов σ = q/S
- Напряженность эл. поля бесконечной плоскости E=2πkσ
- Диэлектрическая проницаемость ε=E 0 /E
- Потенциальная энергия взаимод. зарядов W= k∙q 1 q 2 /R
- Потенциал φ=W/q
- Потенциал точечного заряда φ=k∙q/R
- Напряжение U=A/q
- Для однородного электрического поля U=E∙d
- Электроемкость C=q/U
- Электроемкость плоского конденсатора C=S∙ε ∙ε 0 /d
- Энергия заряженного конденсатора W=qU/2=q²/2С=CU²/2
- Сила тока I=q/t
- Сопротивление проводника R=ρ∙ℓ/S
- Закон Ома для участка цепи I=U/R
- Законы послед. соединения I 1 =I 2 =I, U 1 +U 2 =U, R 1 +R 2 =R
- Законы паралл. соед. U 1 =U 2 =U, I 1 +I 2 =I, 1/R 1 +1/R 2 =1/R
- Мощность электрического тока P=I∙U
- Закон Джоуля-Ленца Q=I 2 Rt
- Закон Ома для полной цепи I=ε/(R+r)
- Ток короткого замыкания (R=0) I=ε/r
- Вектор магнитной индукции B=Fmax/ℓ∙I
- Сила Ампера Fa=IBℓsin α
- Сила Лоренца Fл=Bqυsin α
- Магнитный поток Ф=BSсos α Ф=LI
- Закон электромагнитной индукции Ei=ΔФ/Δt
- ЭДС индукции в движ проводнике Ei=Вℓυ sinα
- ЭДС самоиндукции Esi=-L∙ΔI/Δt
- Энергия магнитного поля катушки Wм=LI 2 /2
- Период колебаний кол.
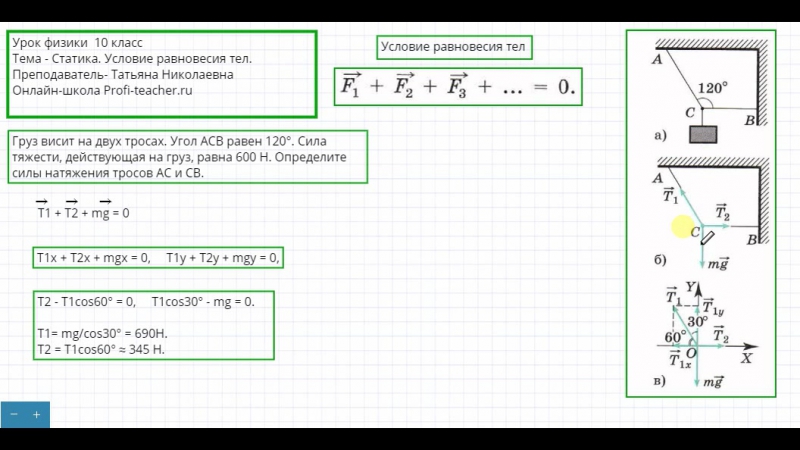 контура T=2π ∙√LC
контура T=2π ∙√LC - Индуктивное сопротивление X L =ωL=2πLν
- Емкостное сопротивление Xc=1/ωC
- Действующее значение силы тока Iд=Imax/√2,
- Действующее значение напряжения Uд=Umax/√2
- Полное сопротивление Z=√(Xc-X L) 2 +R 2
Оптика
- Закон преломления света n 21 =n 2 /n 1 = υ 1 / υ 2
- Показатель преломления n 21 =sin α/sin γ
- Формула тонкой линзы 1/F=1/d + 1/f
- Оптическая сила линзы D=1/F
- max интерференции: Δd=kλ,
- min интерференции: Δd=(2k+1)λ/2
- Диф.решетка d∙sin φ=k λ
Квантовая физика
- Ф-ла Эйнштейна для фотоэффекта hν=Aвых+Ek, Ek=U з е
- Красная граница фотоэффекта ν к = Aвых/h
- Импульс фотона P=mc=h/ λ=Е/с
Физика атомного ядра
- Закон радиоактивного распада N=N 0 ∙2 – t / T
- Энергия связи атомных ядер
E CB =(Zm p +Nm n -Mя)∙c 2
СТО
- t=t 1 /√1-υ 2 /c 2
- ℓ=ℓ 0 ∙√1-υ 2 /c 2
- υ 2 =(υ 1 +υ)/1+ υ 1 ∙υ/c 2
- Е = mс 2
Абсолютно необходимы для того, чтобы человек, решивший изучать эту науку, вооружившись ими, мог чувствовать себя в мире физики как рыба в воде. Без знания формул немыслимо решение задач по физике. Но все формулы запомнить практически невозможно и важно знать, особенно для юного ума, где найти ту или иную формулу и когда ее применить.
Без знания формул немыслимо решение задач по физике. Но все формулы запомнить практически невозможно и важно знать, особенно для юного ума, где найти ту или иную формулу и когда ее применить.
Расположение физических формул в специализированных учебниках распределяется обычно по соответствующим разделам среди текстовой информации, поэтому их поиск там может отнять довольно-таки много времени, а тем более, если они вдруг понадобятся Вам срочно!
Представленные ниже шпаргалки по физике содержат все основные формулы из курса физики , которые будут полезны учащимся школ и вузов.
Все формулы школьного курса по физике с сайта http://4ege.ru
I. Кинематика скачать
1. Основные понятия
2. Законы сложения скоростей и ускорений
3. Нормальное и тангенциальное ускорения
4. Типы движений
4.1. Равномерное движение
4.1.1. Равномерное прямолинейное движение
4.1.2. Равномерное движение по окружности
4.2. Движение с постоянным ускорением
4. 2.1. Равноускоренное движение
2.1. Равноускоренное движение
4.2.2. Равнозамедленное движение
4.3. Гармоническое движение
II. Динамика скачать
1. Второй закон Ньютона
2. Теорема о движении центра масс
3. Третий закон Ньютона
4. Силы
5. Гравитационная сила
6. Силы, действующие через контакт
III. Законы сохранения. Работа и мощность скачать
1. Импульс материальной точки
2. Импульс системы материальных точек
3. Теорема об изменении импульса материальной точки
4. Теорема об изменении импульса системы материальных точек
5. Закон сохранения импульса
6. Работа силы
7. Мощность
8. Механическая энергия
9. Теорема о механической энергии
10. Закон сохранения механической энергии
11. Диссипативные силы
12. Методы вычисления работы
13. Средняя по времени сила
IV. Статика и гидростатика скачать
1. Условия равновесия
2. Вращающий момент
3. Неустойчивое равновесие, устойчивое равновесие, безразличное равновесие
4. Центр масс, центр тяжести
5. Сила гидростатического давления
Сила гидростатического давления
6. Давлением жидкости
7. Давление в какой-либо точке жидкости
8, 9. Давление в однородной покоящейся жидкости
10. Архимедова сила
V. Тепловые явления скачать
1. Уравнение Менделеева-Клапейрона
2. Закон Дальтона
3. Основное уравнение МКТ
4. Газовые законы
5. Первый закон термодинамики
6. Адиабатический процесс
7. КПД циклического процесса (теплового двигателя)
8. Насыщенный пар
VI. Электростатика скачать
1. Закон Кулона
2. Принцип суперпозиции
3. Электрическое поле
3.1. Напряженность и потенциал электрического поля, созданного одним точечным зарядом Q
3.2. Напряженность и потенциал электрического поля, созданного системой точечных зарядов Q1, Q2, …
3.3. Напряженность и потенциал электрического поля, созданного равномерно заряженным по поверхности шаром
3.4. Напряженность и потенциал однородного электрического поля, (созданного равномерно заряженной плоскотью или плоским конденсатором)
4. Потенциальная энергия системы электрических зарядов
Потенциальная энергия системы электрических зарядов
5. Электроемкость
6. Свойства проводника в электрическом поле
VII. Постоянный ток скачать
1. Упорядоченная скорость
2. Сила тока
3. Плотность тока
4. Закон Ома для участка цепи, не содержащего ЭДС
5. Закон Ома для участка цепи, содержащего ЭДС
6. Закон Ома для полной (замкнутой) цепи
7. Последовательное соединение проводников
8. Параллельное соединение проводников
9. Работа и мощность электрического тока
10. КПД электрической цепи
11. Условие выделения максимальной мощности на нагрузке
12. Закон Фарадея для электролиза
VIII. Магнитные явления скачать
1. Магнитное поле
2. Движение зарядов в магнитном поле
3. Рамка с током в магнитном поле
4. Магнитные поля, создаваемые различными токами
5. Взаимодействие токов
6. Явление электромагнитной индукции
7. Явление самоиндукции
IX. Колебания и волны скачать
1. Колебания, определения
2. Гармонические колебания
3. Простейшие колебательные системы
Простейшие колебательные системы
4. Волна
X. Оптика скачать
1. Закон отражения
2. Закон преломления
3. Линза
4. Изображение
5. Возможные случаи расположения предмета
6. Интерференция
7. Дифракция
Большая шпаргалка по физике . Все формулы изложены в компактном виде с небольшими комментариями. Шпаргалка также содержит полезные константы и прочую информацию. Файл содержит следующие разделы физики:
Механика (кинематика, динамика и статика)
Молекулярная физика. Свойства газов и жидкостей
Термодинамика
Электрические и электромагнитные явления
Электродинамика. Постоянный ток
Электромагнетизм
Колебания и волны. Оптика. Акустика
Квантовая физика и теория относительности
Маленькая шпора по физике . Все самое необходимое для экзамена. Нарезка основных формул по физике на одной странице. Не очень эстетично, зато практично. 🙂
Единый Государственный Экзамен охватывает информацию по всему курсу физики с 7 по 11 класс.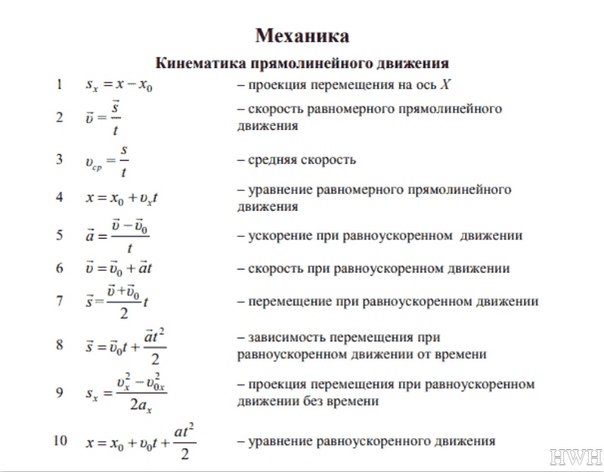 Однако если некоторые формулы по физике для ЕГЭ неплохо запоминаются сами по себе, над другими приходится поработать. Мы рассмотрим некоторые формулы, которые полезны для решения различных задач.
Однако если некоторые формулы по физике для ЕГЭ неплохо запоминаются сами по себе, над другими приходится поработать. Мы рассмотрим некоторые формулы, которые полезны для решения различных задач.
Кинематика
Начнем традиционно с кинематики. Частая ошибка здесь – неверное вычисление средней скорости неравномерного прямолинейного движения. В данном случае задачи пытаются решать с помощью среднего арифметического. Однако все не так просто. Среднее арифметическое – только частный случай. А для нахождения средней скорости движения существует полезная формула:
где S – весь путь, пройденный телом за определенное время t.
Молекулярно-Кинетическая Теория (МКТ)
МКТ может поставить множество коварных «ловушек» для невнимательного школьника. Чтобы избежать этого, нужно свободно владеть формулами по физике для ЕГЭ в этой области.
Начнем с закона Менделеева-Клапейрона, использующегося для идеальных газов. Он звучит так:
где p –давление газа,
V – занимаемый им объем,
n – количество газа,
R – универсальная газовая постоянная,
T – температура.
Обратите внимание на примеры задач с применением этого закона.
Все представляют себе, что такое влажность. Значения относительной влажности ежедневно сообщаются в СМИ. На экзамене же пригодится формула: здесь ф – относительная влажность воздуха,
ρ – плотность водяного пара, находящегося в воздухе,
ρ0 – плотность насыщенного пара при конкретной температуре.
Эта последняя величина – табличное значение, поэтому оно должно быть в условии задачи.
Термодинамика
Термодинамика – отрасль, достаточно близкая к МКТ, поэтому многие понятия пересекаются. Термодинамика базируется на двух своих началах. Практически каждая задача этой области требует знание и применение первого начала термодинамики, выраженного формулой
Это формулируется следующим образом:
Количество теплоты Q, которое было получено системой, расходуется на совершение работы A над внешними телами и изменение ΔU внутренней энергии данной системы.
Сила Архимеда
Напоследок поговорим о поведении погруженных в жидкость тел. Очевидно, что на каждое из них действует сила тяжести, направленная вертикально вниз. Но в жидкости все тела весят меньше. Это обусловливается частичным компенсированием силы тяжести противоположно направленной силой Архимеда. Ее значение равно Таким образом, эта сила, старающаяся вытолкнуть тело из жидкости, зависит от плотности той самой жидкости и объема погруженной в нее части тела. Сила Архимеда действует и в газах, но вследствие ничтожности плотности газов ею обыкновенно пренебрегают.
Очевидно, что на каждое из них действует сила тяжести, направленная вертикально вниз. Но в жидкости все тела весят меньше. Это обусловливается частичным компенсированием силы тяжести противоположно направленной силой Архимеда. Ее значение равно Таким образом, эта сила, старающаяся вытолкнуть тело из жидкости, зависит от плотности той самой жидкости и объема погруженной в нее части тела. Сила Архимеда действует и в газах, но вследствие ничтожности плотности газов ею обыкновенно пренебрегают.
ЕГЭ проверяет знания школьника в различных областях физики. Формулы для ЕГЭ по физике способствуют успешному решению задач (можно воспользоваться ) и общему пониманию основных физических процессов.
Сессия приближается, и пора нам переходить от теории к практике. На выходных мы сели и подумали о том, что многим студентам было бы неплохо иметь под рукой подборку основных физических формул. Сухие формулы с объяснением: кратко, лаконично, ничего лишнего. Очень полезная штука при решении задач, знаете ли. Да и на экзамене, когда из головы может «выскочить» именно то, что накануне было жесточайше вызубрено, такая подборка сослужит отличную службу.
Да и на экзамене, когда из головы может «выскочить» именно то, что накануне было жесточайше вызубрено, такая подборка сослужит отличную службу.
Больше всего задач обычно задают по трем самым популярным разделам физики. Это механика , термодинамика и молекулярная физика , электричество . Их и возьмем!
Основные формулы по физике динамика, кинематика, статика
Начнем с самого простого. Старое-доброе любимое прямолинейное и равномерное движение.
Формулы кинематики:
Конечно, не будем забывать про движение по кругу, и затем перейдем к динамике и законам Ньютона.
После динамики самое время рассмотреть условия равновесия тел и жидкостей, т.е. статику и гидростатику
Теперь приведем основные формулы по теме «Работа и энергия». Куда же нам без них!
Основные формулы молекулярной физики и термодинамики
Закончим раздел механики формулами по колебаниям и волнам и перейдем к молекулярной физике и термодинамике.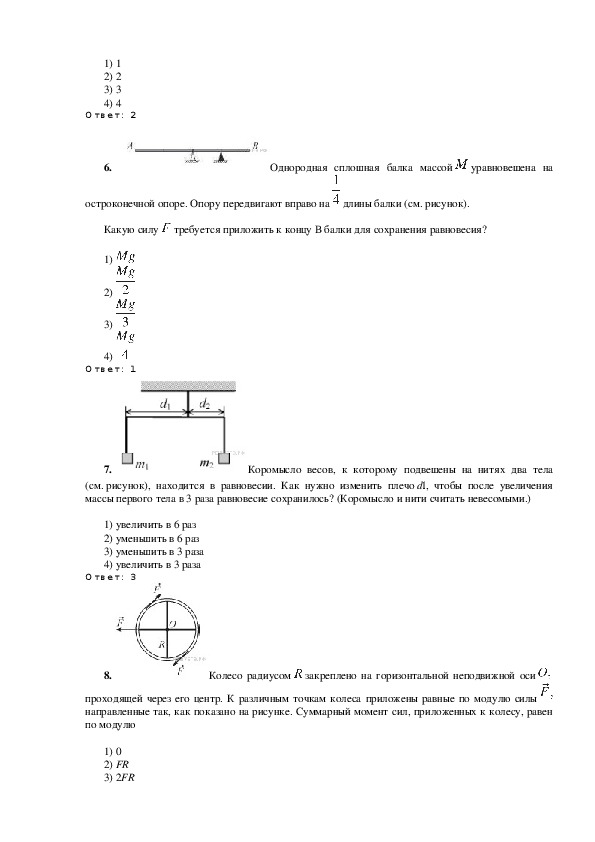
Коэффициент полезного действия, закон Гей-Люссака, уравнение Клапейрона-Менделеева – все эти милые сердцу формулы собраны ниже.
Кстати! Для всех наших читателей сейчас действует скидка 10% на .
Основные формулы по физике: электричество
Пора переходить к электричеству, хоть его и любят меньше термодинамики. Начинаем с электростатики.
И, под барабанную дробь, заканчиваем формулами для закона Ома, электромагнитной индукции и электромагнитных колебаний.
На этом все. Конечно, можно было бы привести еще целую гору формул, но это ни к чему. Когда формул становится слишком много, можно легко запутаться, а там и вовсе расплавить мозг. Надеемся, наша шпаргалка основных формул по физике поможет решать любимые задачи быстрее и эффективнее. А если хотите уточнить что-то или не нашли нужной формулы: спросите у экспертов студенческого сервиса . Наши авторы держат в голове сотни формул и щелкают задачи, как орешки. Обращайтесь, и вскоре любая задача будет вам «по зубам».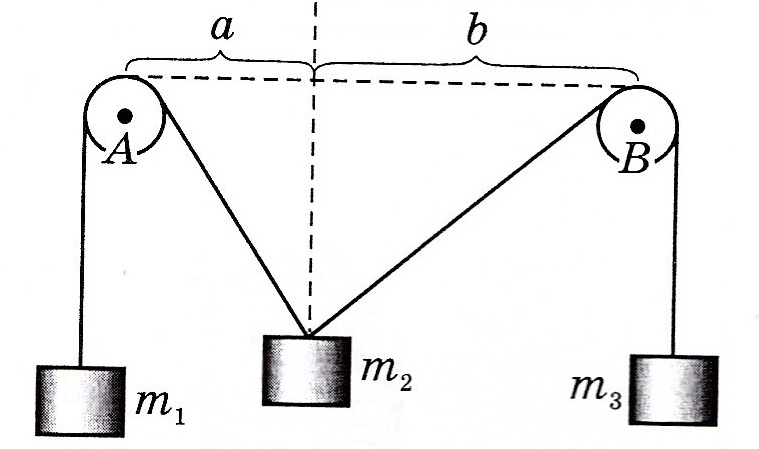
Равновесие и статика
Когда все силы, действующие на объект, уравновешены, говорят, что объект находится в состоянии равновесия . Силы считаются уравновешенными , если силы, направленные вправо, уравновешиваются силами, направленными влево, а силы, направленные вверх, уравновешиваются силами, направленными вниз. Это, однако, не обязательно означает, что все силы равны друг другу. Рассмотрим два объекта, изображенных на силовой диаграмме, показанной ниже.Обратите внимание, что два объекта находятся в равновесии, потому что силы, действующие на них, уравновешены; однако отдельные силы не равны друг другу. Сила 50 Н не равна силе 30 Н.
Если объект находится в равновесии, то силы уравновешены. Сбалансированный — ключевое слово, которое используется для описания равновесных ситуаций. Таким образом, результирующая сила равна нулю, а ускорение равно 0 м/с/с. Объекты в равновесии должны иметь ускорение 0 м/с/с. Это следует из первого закона движения Ньютона. Но наличие ускорения 0 м/с/с не означает, что объект находится в состоянии покоя. Объект в равновесии либо …
Это следует из первого закона движения Ньютона. Но наличие ускорения 0 м/с/с не означает, что объект находится в состоянии покоя. Объект в равновесии либо …
- в состоянии покоя и в состоянии покоя или
- в движении и продолжает движение с той же скоростью и направлением.
Это тоже следует из первого закона движения Ньютона.
Анализ ситуации статического равновесия
Если объект покоится и находится в состоянии равновесия, то мы бы сказали, что объект находится в «статическом равновесии».«Статический» означает стационарный или покоящийся . Обычная физическая лаборатория состоит в том, чтобы подвешивать объект на двух или более веревках и измерять силы, действующие под углом на объект, чтобы выдержать его вес. объект анализируется с точки зрения сил, действующих на объект. объект должен быть 0 ньютонов.Таким образом, если все силы сложить как векторы, то результирующая сила (сумма векторов) должна быть равна 0 ньютонов. (Напомним, что результирующая сила представляет собой «векторную сумму всех сил» или равнодействующую сложения всех отдельных сил лицом к хвосту.) Таким образом, можно построить точно нарисованную диаграмму сложения векторов для определения равнодействующей. Примеры данных для такой лаборатории показаны ниже.
(Напомним, что результирующая сила представляет собой «векторную сумму всех сил» или равнодействующую сложения всех отдельных сил лицом к хвосту.) Таким образом, можно построить точно нарисованную диаграмму сложения векторов для определения равнодействующей. Примеры данных для такой лаборатории показаны ниже.
|
Для большинства студентов результатом было 0 ньютонов (или, по крайней мере, очень близко к 0 Н).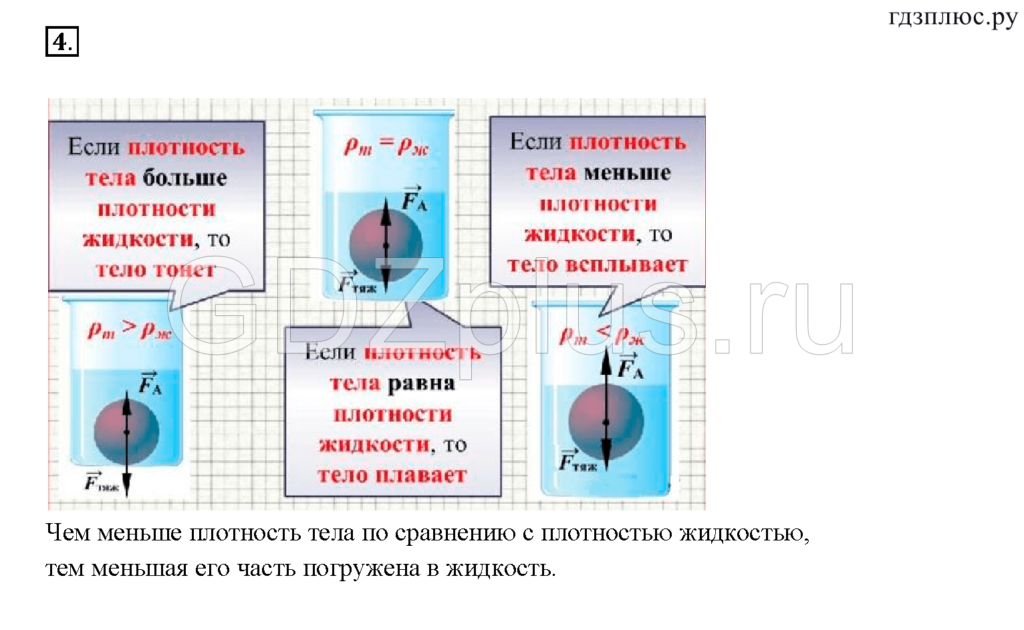 Это то, что мы ожидали – поскольку объект находился в равновесии, результирующая сила (векторная сумма всех сил) должна быть 0 Н.
Это то, что мы ожидали – поскольку объект находился в равновесии, результирующая сила (векторная сумма всех сил) должна быть 0 Н.
Другой способ определения результирующей силы (векторной суммы всех сил) заключается в использовании тригонометрических функций для разложения каждой силы на ее горизонтальную и вертикальную составляющие. Когда компоненты известны, их можно сравнить, чтобы увидеть, уравновешены ли вертикальные силы и уравновешены ли горизонтальные силы.На приведенной ниже диаграмме показаны векторы A, B и C и их соответствующие компоненты. Для векторов A и B вертикальные компоненты можно определить с помощью синуса угла, а горизонтальные компоненты можно проанализировать с помощью косинуса угла. Величина и направление каждого компонента для выборочных данных показаны в таблице под диаграммой.
Данные в таблице выше показывают, что силы уравновешиваются почти .Анализ горизонтальных составляющих показывает, что левая составляющая A почти уравновешивает правую составляющую B.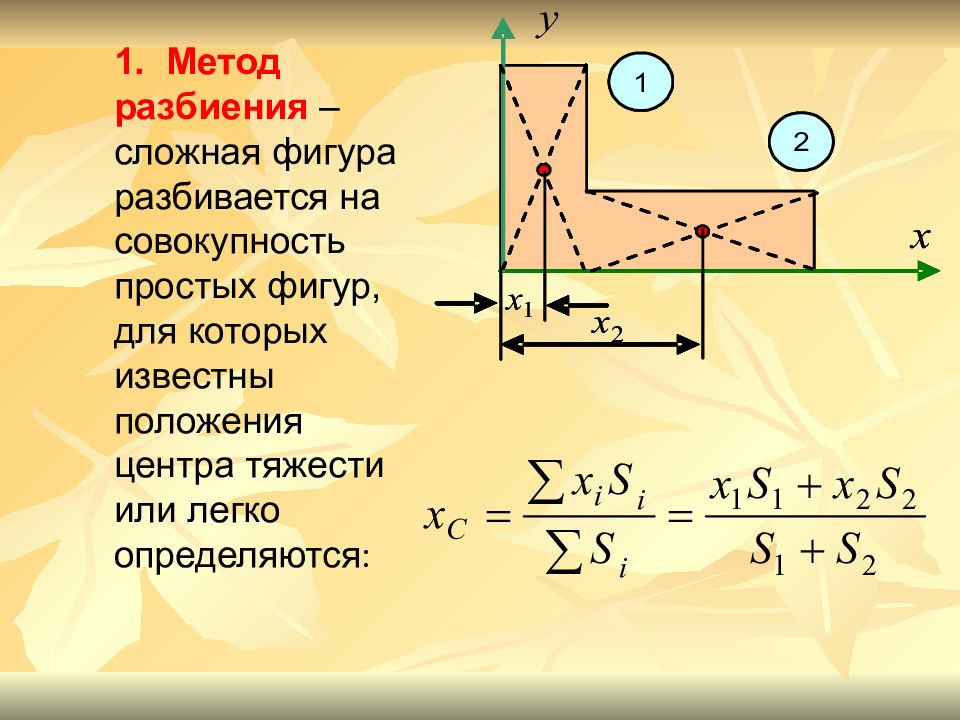 Анализ вертикальных составляющих показывает, что сумма восходящих составляющих A + B почти уравновешивает нисходящую составляющую C , Векторная сумма всех сил ( почти ) равна 0 ньютонов. Но как быть с разницей в 0,1 Н между силами, направленными вправо и влево, и разницей в 0,2 Н между силами, направленными вверх и вниз? Почему составляющие силы только почти уравновешивают? Данные образца, используемые в этом анализе, являются результатом измеренных данных реальной экспериментальной установки.Разница между фактическими и ожидаемыми результатами связана с ошибкой, возникающей при измерении силы A и силы B. Мы должны были бы заключить, что этот низкий предел экспериментальной погрешности отражает эксперимент с отличными результатами. Мы могли бы сказать, что это «достаточно близко для работы правительства».
Анализ вертикальных составляющих показывает, что сумма восходящих составляющих A + B почти уравновешивает нисходящую составляющую C , Векторная сумма всех сил ( почти ) равна 0 ньютонов. Но как быть с разницей в 0,1 Н между силами, направленными вправо и влево, и разницей в 0,2 Н между силами, направленными вверх и вниз? Почему составляющие силы только почти уравновешивают? Данные образца, используемые в этом анализе, являются результатом измеренных данных реальной экспериментальной установки.Разница между фактическими и ожидаемыми результатами связана с ошибкой, возникающей при измерении силы A и силы B. Мы должны были бы заключить, что этот низкий предел экспериментальной погрешности отражает эксперимент с отличными результатами. Мы могли бы сказать, что это «достаточно близко для работы правительства».
Приведенный выше анализ сил, действующих на объект, находящийся в равновесии, обычно используется для анализа ситуаций, связанных с объектами, находящимися в статическом равновесии. Наиболее распространенное приложение включает анализ сил, действующих на знак, который находится в состоянии покоя. Например, рассмотрим картину справа, которая висит на стене. Картина находится в состоянии равновесия, а значит, все силы, действующие на картину, должны быть уравновешены. То есть все горизонтальные компоненты должны составлять 0 ньютонов, а все вертикальные компоненты должны составлять 0 ньютонов. Натяжение троса A, направленное влево, должно уравновешивать натяжение троса B, направленного вправо, а сумма натяжения троса A и троса B вверх должна уравновешивать вес знака.
Наиболее распространенное приложение включает анализ сил, действующих на знак, который находится в состоянии покоя. Например, рассмотрим картину справа, которая висит на стене. Картина находится в состоянии равновесия, а значит, все силы, действующие на картину, должны быть уравновешены. То есть все горизонтальные компоненты должны составлять 0 ньютонов, а все вертикальные компоненты должны составлять 0 ньютонов. Натяжение троса A, направленное влево, должно уравновешивать натяжение троса B, направленного вправо, а сумма натяжения троса A и троса B вверх должна уравновешивать вес знака.
Предположим, что измеренное натяжение обоих тросов составляет 50 Н, и известно, что угол, который каждый трос образует с горизонтом, равен 30 градусам. Каков вес знака? На этот вопрос можно ответить, проведя силовой анализ с использованием тригонометрических функций. Вес знака равен сумме восходящих составляющих натяжения двух тросов. Таким образом, для определения этой вертикальной составляющей можно использовать тригонометрическую функцию.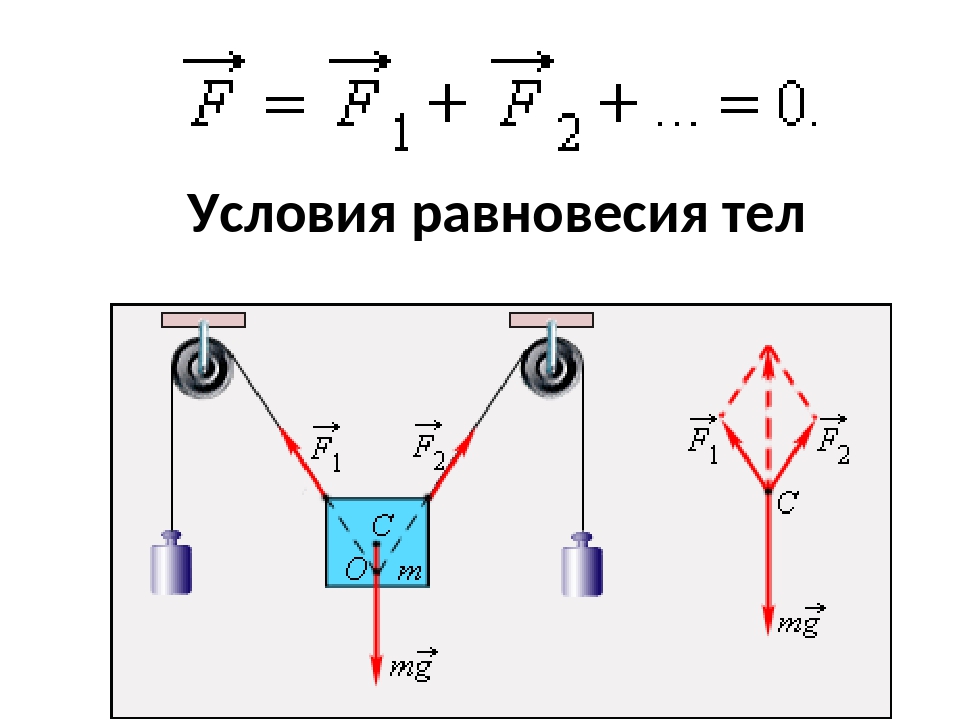 Схема и сопутствующие работы показаны ниже.
Схема и сопутствующие работы показаны ниже.
Поскольку каждый трос тянет вверх с силой 25 Н, общая сила тяги знака вверх составляет 50 Н. Следовательно, сила тяжести (также известная как вес) составляет 50 Н, направленная вниз. Знак весит 50 Н.
В приведенной выше задаче натяжение троса и угол , который трос образует с горизонталью, используются для определения веса знака.Идея состоит в том, что натяжение, угол и вес связаны. Если известны любые две из этих трех, то третью величину можно определить с помощью тригонометрических функций.
В качестве другого примера, иллюстрирующего эту идею, рассмотрим симметрично подвешенный знак, как показано справа. Если известно, что знак имеет массу 5 кг и если угол между двумя тросами составляет 100 градусов, то можно определить натяжение троса. Предполагая, что знак находится в равновесии (хорошее предположение, если он остается в покое), два троса должны создавать достаточную направленную вверх силу, чтобы уравновесить направленную вниз силу тяжести.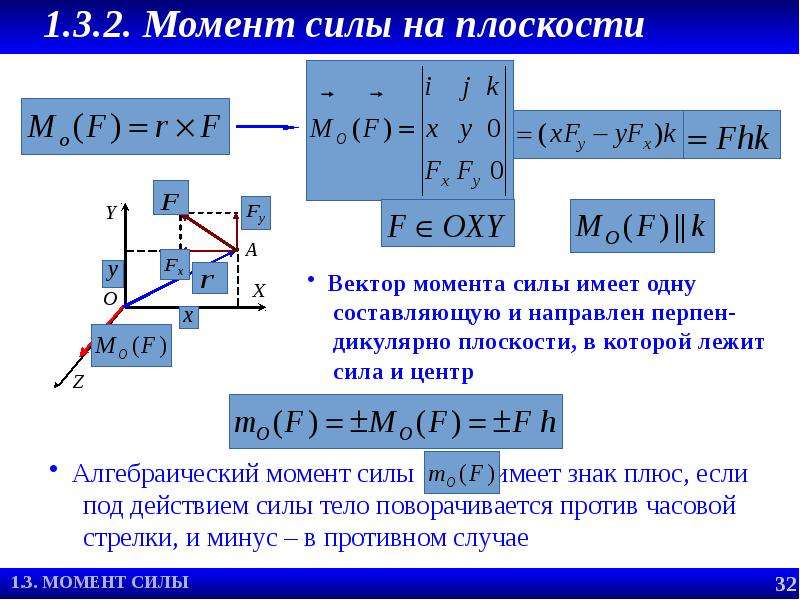 Сила тяжести (также известная как вес) составляет 49 Н (Fgrav = m*g), поэтому каждый из двух тросов должен тянуться вверх с силой 24,5 Н. Поскольку угол между кабелями равен 100 градусам, каждый кабель должен составлять угол 50 градусов с вертикалью и угол 40 градусов с горизонталью. Эскиз этой ситуации (см. диаграмму ниже) показывает, что натяжение троса можно найти с помощью функции синуса. Треугольник ниже иллюстрирует эти отношения.
Сила тяжести (также известная как вес) составляет 49 Н (Fgrav = m*g), поэтому каждый из двух тросов должен тянуться вверх с силой 24,5 Н. Поскольку угол между кабелями равен 100 градусам, каждый кабель должен составлять угол 50 градусов с вертикалью и угол 40 градусов с горизонталью. Эскиз этой ситуации (см. диаграмму ниже) показывает, что натяжение троса можно найти с помощью функции синуса. Треугольник ниже иллюстрирует эти отношения.
Концептуальное мышление
Существует важный принцип, вытекающий из некоторых тригонометрических вычислений, выполненных выше.Принцип заключается в том, что по мере увеличения угла с горизонталью сила натяжения, необходимая для удержания знака в равновесии, уменьшается. Чтобы проиллюстрировать это, рассмотрим изображение силой 10 ньютонов, удерживаемое проводами с тремя разными ориентациями, как показано на диаграммах ниже. В каждом случае для поддержки изображения используются два провода; каждый провод должен выдерживать половину веса знака (5 Н). Угол, который провода образуют с горизонтом, варьируется от 60 до 15 градусов. Используйте эту информацию и приведенную ниже диаграмму, чтобы определить натяжение проволоки для каждой ориентации.Когда закончите, нажмите кнопку, чтобы просмотреть ответы.
Угол, который провода образуют с горизонтом, варьируется от 60 до 15 градусов. Используйте эту информацию и приведенную ниже диаграмму, чтобы определить натяжение проволоки для каждой ориентации.Когда закончите, нажмите кнопку, чтобы просмотреть ответы.
В заключение, равновесие – это состояние объекта, при котором все силы, действующие на него, уравновешены. В таких случаях результирующая сила равна 0 ньютонов. Зная силы, действующие на объект, можно использовать тригонометрические функции для определения горизонтальной и вертикальной составляющих каждой силы. Если в равновесии, то все вертикальные компоненты должны уравновешиваться, и все горизонтальные компоненты должны уравновешиваться.
Мы хотели бы предложить … Иногда недостаточно просто прочитать об этом. Вы должны взаимодействовать с ним! И это именно то, что вы делаете, когда используете один из интерактивов The Physics Classroom.
 Мы хотели бы предложить вам совместить чтение этой страницы с использованием нашей интерактивной игры «Назовите этот вектор», интерактивной игры «Добавление вектора» или интерактивной игры «Угадай вектор».Все три интерактива можно найти в разделе Physics Interactive на нашем веб-сайте, и они обеспечивают интерактивный опыт с возможностью добавления векторов.
Мы хотели бы предложить вам совместить чтение этой страницы с использованием нашей интерактивной игры «Назовите этот вектор», интерактивной игры «Добавление вектора» или интерактивной игры «Угадай вектор».Все три интерактива можно найти в разделе Physics Interactive на нашем веб-сайте, и они обеспечивают интерактивный опыт с возможностью добавления векторов.
Проверьте свое понимание
Следующие вопросы предназначены для проверки вашего понимания равновесных ситуаций. Нажмите кнопку, чтобы просмотреть ответы на эти вопросы.
1.Следующая картина висит на стене. Используйте тригонометрические функции, чтобы определить вес изображения.
2. Нижеследующая табличка висит снаружи кабинета физики, рекламируя самую важную истину, которую можно найти внутри. Знак поддерживается диагональным тросом и жесткой горизонтальной перекладиной. Если знак имеет массу 50 кг, то определить натяжение диагонального троса, поддерживающего его вес.
Если знак имеет массу 50 кг, то определить натяжение диагонального троса, поддерживающего его вес.
3. Следующий знак можно найти в Гленвью. Знак имеет массу 50 кг. Определить натяжение тросов.
4. После последней доставки печально известный аист сообщает хорошие новости. Если знак имеет массу 10 кг, то какова сила натяжения в каждом тросе? Используйте тригонометрические функции и эскиз, чтобы помочь в решении.
5. Предположим, что студент тянет двумя большими силами (F 1 и F 2 ), чтобы поднять 1-килограммовую книгу двумя тросами. Если тросы образуют с горизонтом угол 1 градус, то чему равно натяжение троса?
12.2: Условия статического равновесия
Цели обучения
- Определите физические условия статического равновесия.
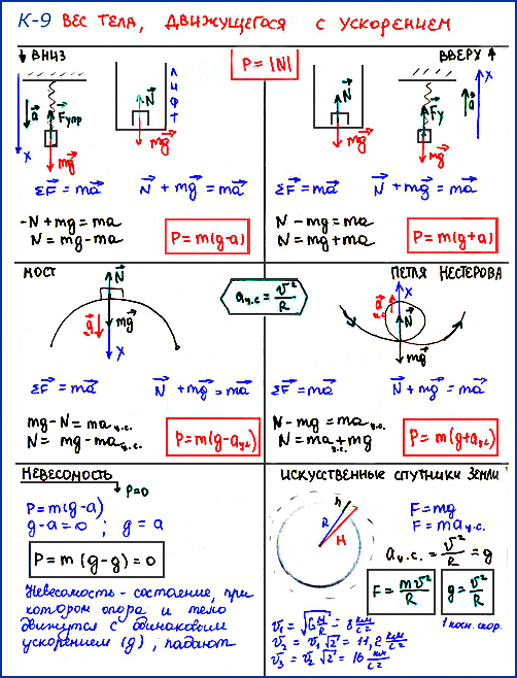
- Нарисуйте диаграмму свободного тела для твердого тела, на которое действуют силы.
- Объясните, как условия равновесия позволяют решать задачи статики.
Мы говорим, что твердое тело находится в равновесии , когда его линейное и угловое ускорения равны нулю относительно инерциальной системы отсчета. Это означает, что тело, находящееся в равновесии, может двигаться, но в этом случае его линейная и угловая скорости должны быть постоянными. Мы говорим, что твердое тело находится в статическом равновесии , когда оно находится в покое в выбранной нами системе отсчета .Обратите внимание, что различие между состоянием покоя и состоянием равномерного движения является искусственным, то есть объект может находиться в состоянии покоя в выбранной нами системе отсчета, но для наблюдателя, движущегося с постоянной скоростью относительно нашей системы отсчета, тот же самый объект находится в равномерном движении с постоянной скоростью. Поскольку движение относительно , то, что для нас находится в статическом равновесии, находится в динамическом равновесии для движущегося наблюдателя, и наоборот. Поскольку законы физики одинаковы для всех инерциальных систем отсчета, в инерциальной системе отсчета нет различия между статическим равновесием и равновесием.
Поскольку движение относительно , то, что для нас находится в статическом равновесии, находится в динамическом равновесии для движущегося наблюдателя, и наоборот. Поскольку законы физики одинаковы для всех инерциальных систем отсчета, в инерциальной системе отсчета нет различия между статическим равновесием и равновесием.
Согласно второму закону Ньютона линейное ускорение твердого тела вызвано действующей на него результирующей силой, или
\[\sum_{k} \vec{F}_{k} = m \vec{a}_{CM} \ldotp \label{12.1}\]
Здесь сумма всех внешних сил, действующих на тело, где m — его масса, а \(\vec{a}_{CM}\) — линейное ускорение его центра масс (концепция, которую мы обсуждали в линейной Импульс и столкновения по линейному импульсу и столкновениям). В состоянии равновесия линейное ускорение равно нулю.Если мы установим ускорение равным нулю в уравнении \ref{12.1}, мы получим следующее уравнение:
Первое состояние равновесия
Первое условие равновесия статического равновесия твердого тела выражает поступательное равновесие:
\[\sum_{k} \vec{F}_{k} = \vec{0} \ldotp \label{12.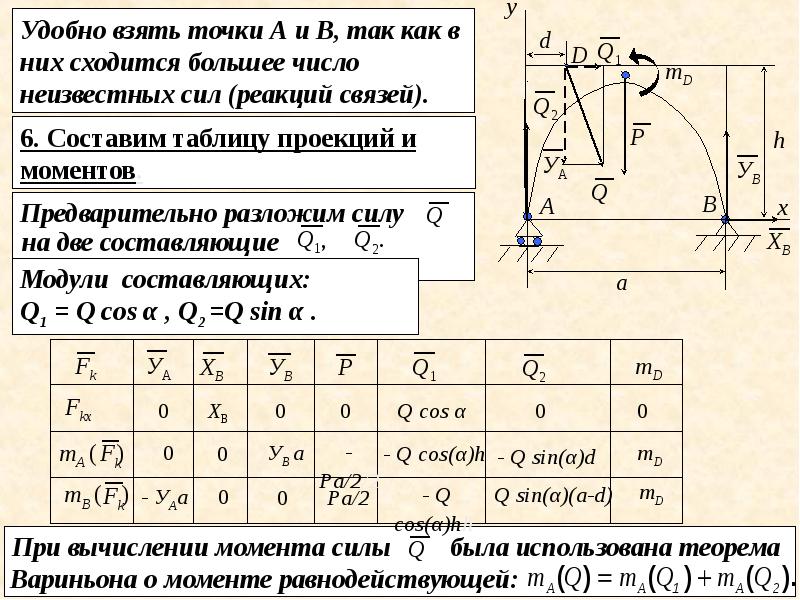 2}\]
2}\]
Первое условие равновесия, уравнение \ref{12.2}, является условием равновесия сил, с которым мы столкнулись при изучении приложений законов Ньютона.
Это векторное уравнение эквивалентно следующим трем скалярным уравнениям для компонентов результирующей силы:
\[\sum_{k} F_{kx} = 0,\; \sum_{k} F_{ky} = 0,\; \sum_{k} F_{kz} = 0 \ldotp \label{12.3}\]
Аналогично уравнению \ref{12.1}, мы можем утверждать, что вращательное ускорение \(\vec{\alpha}\) твердого тела вокруг фиксированной оси вращения вызывается чистым крутящим моментом, действующим на тело, или
\[\sum_{k} \vec{\tau}_{k} = I \vec{\alpha} \ldotp \label{12.4}\]
Здесь I – инерция тела при вращении вокруг этой оси, а сумма составляет всех крутящих моментов \(\vec{\tau}_{k}\) внешних сил в уравнении \ref{12.2}. В состоянии равновесия ускорение вращения равно нулю. Приравняв к нулю правую часть уравнения \ref{12.4}, мы получим второе условие равновесия:
Второе условие равновесия
Второе условие равновесия для статического равновесия твердого тела выражает вращательное равновесие:
\[\sum_{k} \vec{\tau}_{k} = \vec{0} \ldotp \label{12.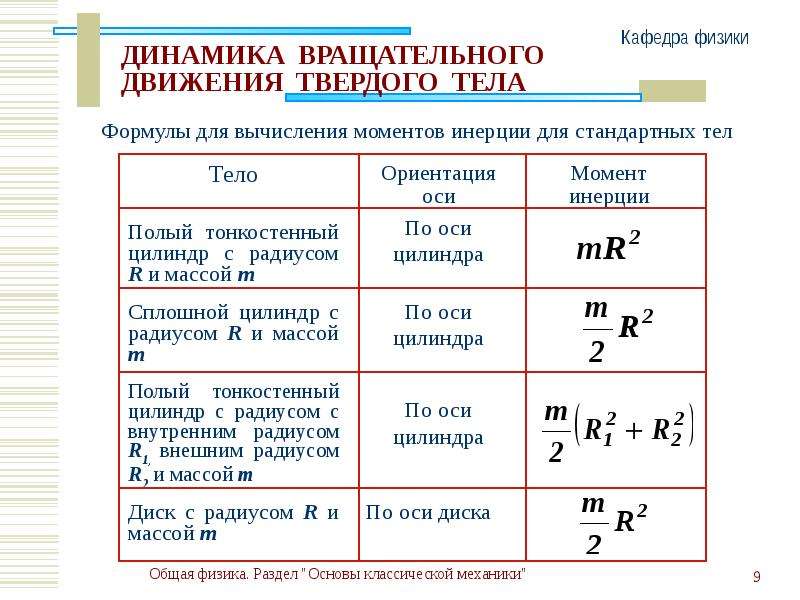 5}\]
5}\]
Второе условие равновесия, уравнение \ref{12.5}, является условием равновесия крутящих моментов, с которым мы столкнулись при изучении динамики вращения. Стоит отметить, что это уравнение равновесия обычно справедливо для вращательного равновесия вокруг любой оси вращения (фиксированной или иной). Опять же, это векторное уравнение эквивалентно трем скалярным уравнениям для векторных составляющих чистого крутящего момента:
\[\sum_{k} \tau_{kx} = 0,\; \sum_{k} \tau_{ky} = 0,\; \sum_{k} \tau_{kz} = 0 \ldotp \label{12.6}\]
Второе условие равновесия означает, что в равновесии нет чистого внешнего крутящего момента, вызывающего вращение вокруг какой-либо оси. Первое и второе условия равновесия задаются в конкретной системе отсчета. Первое условие включает только силы и, следовательно, не зависит от начала системы отсчета. Однако второе условие включает крутящий момент, который определяется как векторное произведение \(\vec{\tau}_{k} = \vec{r}_{k} \times \vec{F}_{k}\ ), где в уравнение входит вектор положения \(\vec{r}_{k}\) относительно оси вращения точки приложения силы. Следовательно, крутящий момент зависит от положения оси в системе отсчета. Однако, когда условия вращательного и поступательного равновесия выполняются одновременно в одной системе отсчета, они также выполняются в любой другой инерциальной системе отсчета, так что чистый крутящий момент относительно любой оси вращения по-прежнему равен нулю. Объяснение этому довольно простое.
Следовательно, крутящий момент зависит от положения оси в системе отсчета. Однако, когда условия вращательного и поступательного равновесия выполняются одновременно в одной системе отсчета, они также выполняются в любой другой инерциальной системе отсчета, так что чистый крутящий момент относительно любой оси вращения по-прежнему равен нулю. Объяснение этому довольно простое.
Предположим, что вектор \(\vec{R}\) является положением начала новой инерциальной системы отсчета S′ в старой инерциальной системе отсчета S.Из нашего исследования относительного движения мы знаем, что в новой системе отсчета S′ вектор положения \(\vec{r}′_{k}\) точки, где действует сила \(\vec{F}_ {k}\) относится к \(\vec{r}_{k}\) через уравнение
\[\vec{r}’_{k} = \vec{r}_{k} – \vec{R} \ldotp\]
Теперь мы можем просуммировать все крутящие моменты \(\vec{\tau}’_{k} = \vec{r}’_{k} \times \vec{F}_{k}\) всех внешних сил в новая система отсчета, S’:
\[\sum_{k} \vec{\tau}’_{k} = \sum_{k} \vec{r}’_{k} \times \vec{F}_{k} = \sum_{ k} (\vec{r}_{k} – \vec{R}) \times \vec{F}_{k} = \sum_{k} \vec{r}_{k} \times \vec{ F}_{k} – \sum_{k} \vec{R} \times \vec{F}_{k} = \sum \vec{\tau}_{k} – \vec{R} \times \ sum_{k} \vec{F}_{k} = \vec{0} \ldotp\]
На последнем этапе этой цепочки рассуждений мы использовали тот факт, что в равновесии в старой системе отсчета S первый член исчезает из-за уравнения \ref{12. 5}, а второй член исчезает из-за уравнения \ref{12.2}. Отсюда мы видим, что чистый крутящий момент в любой инерциальной системе отсчета S′ равен нулю при условии, что оба условия равновесия выполняются в инерциальной системе отсчета \ref{S}.
5}, а второй член исчезает из-за уравнения \ref{12.2}. Отсюда мы видим, что чистый крутящий момент в любой инерциальной системе отсчета S′ равен нулю при условии, что оба условия равновесия выполняются в инерциальной системе отсчета \ref{S}.
Практическим следствием этого является то, что при применении условий равновесия для твердого тела мы можем выбрать любую точку в качестве начала системы отсчета. Наш выбор системы отсчета продиктован физическими особенностями решаемой задачи.В одной системе отсчета математическая форма условий равновесия может быть довольно сложной, тогда как в другой системе те же самые условия могут иметь более простую математическую форму, которую легко решить. Начало выбранной системы отсчета называется точкой поворота.
В самом общем случае условия равновесия выражаются шестью скалярными уравнениями (уравнения \ref{12.3} и \ref{12.6}). Для плоских задач равновесия с вращением вокруг неподвижной оси, которые мы рассматриваем в этой главе, количество уравнений можно сократить до трех. Стандартная процедура заключается в принятии системы отсчета, где ось Z является осью вращения. При таком выборе оси чистый крутящий момент имеет только z-компоненту, все силы, имеющие ненулевые крутящие моменты, лежат в плоскости xy, и, следовательно, вклады в чистый крутящий момент вносят только x- и y-компоненты внешних сил. сил. Таким образом, для плоских задач с осью вращения, перпендикулярной плоскости xy, мы имеем следующие три условия равновесия сил и моментов:
Стандартная процедура заключается в принятии системы отсчета, где ось Z является осью вращения. При таком выборе оси чистый крутящий момент имеет только z-компоненту, все силы, имеющие ненулевые крутящие моменты, лежат в плоскости xy, и, следовательно, вклады в чистый крутящий момент вносят только x- и y-компоненты внешних сил. сил. Таким образом, для плоских задач с осью вращения, перпендикулярной плоскости xy, мы имеем следующие три условия равновесия сил и моментов:
\[F_{1x} + F_{2x} + \cdots + F_{Nx} = 0 \label{12.7}\]
\[F_{1y} + F_{2y} + \cdots + F_{Ny} = 0 \label{12.8}\]
\[\tau_{1} + \tau_{2} + \cdots + \tau_{N} = 0 \label{12.9}\]
где суммируется по всем N внешним силам, действующим на тело, и по их моментам. В уравнении \ref{12.9} мы упростили запись, опустив нижний индекс z, но здесь мы понимаем, что суммирование производится по всем вкладам вдоль оси z, которая является осью вращения. В уравнении \ref{12.9} z-компонента крутящего момента \(\vec{\tau}_{k}\) от силы \(\vec{F}_{k}\) равна
\[\tau_{k} = r_{k} F_{k} \sin \theta \label{12. 10}\]
10}\]
, где r k — длина плеча рычага силы, а F k — величина силы (как вы видели в разделе «Вращение с фиксированной осью»). Угол \(\theta\) — это угол между векторами \(\vec{r}_{k}\) и \(\vec{F}_{k}\), измеряемый от вектора \(\vec {r}_{k}\) до вектора \(\vec{F}_{k}\) в направлении против часовой стрелки (рисунок \(\PageIndex{1}\)). При использовании уравнения \ref{12.10} мы часто вычисляем величину крутящего момента и присваиваем его смысл как положительный (+) или отрицательный (-), в зависимости от направления вращения, вызванного только этим крутящим моментом.В уравнении \ref{12.9} чистый крутящий момент представляет собой сумму членов, каждый из которых рассчитывается из уравнения \ref{12.10}, и каждый член должен иметь правильный смысл . Точно так же в уравнении \ref{12.7} мы назначаем знак + для силовых компонентов в направлении + x и знак – для компонентов в направлении – x.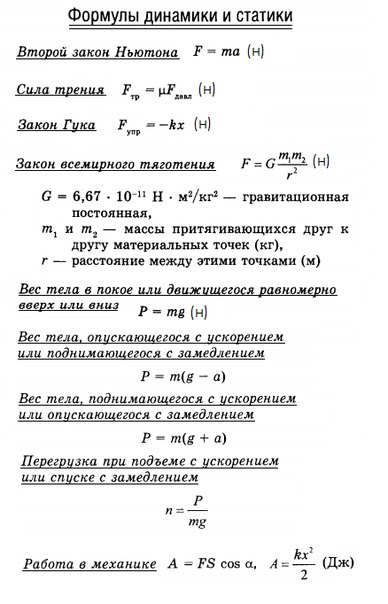 Этому же правилу необходимо последовательно следовать в уравнении \ref{12.8} при вычислении компонентов силы вдоль оси Y.
Этому же правилу необходимо последовательно следовать в уравнении \ref{12.8} при вычислении компонентов силы вдоль оси Y.
Примечание
Просмотрите эту демонстрацию, чтобы увидеть, как две силы действуют на твердый квадрат в двух измерениях. Все время выполняются условия статического равновесия, заданные уравнением \ref{12.7} – уравнением \ref{12.9}. Вы можете варьировать величины сил и их плеч рычагов и наблюдать, как эти изменения влияют на квадрат.
Во многих равновесных ситуациях одной из сил, действующих на тело, является его вес. На диаграммах свободного тела вектор веса привязан к центру тяжести тела. Для всех практических целей центр тяжести идентичен центру масс, как вы узнали из линейного импульса и столкновений о линейном импульсе и столкновениях. Только в тех случаях, когда тело имеет большую пространственную протяженность, так что гравитационное поле неоднородно по всему его объему, центр тяжести и центр масс находятся в разных точках.Однако в практических ситуациях даже такие большие объекты, как здания или круизные лайнеры, находятся в однородном гравитационном поле на поверхности Земли, где ускорение свободного падения имеет постоянную величину g = 9,8 м/с 2 . В этих ситуациях центр тяжести идентичен центру масс. Поэтому на протяжении всей этой главы мы используем центр масс (ЦМ) как точку, к которой прикрепляется весовой вектор. Напомним, что ЦМ имеет особый физический смысл: при приложении внешней силы к телу точно в его ЦМ тело в целом совершает поступательное движение и такая сила не вызывает вращения.
На диаграммах свободного тела вектор веса привязан к центру тяжести тела. Для всех практических целей центр тяжести идентичен центру масс, как вы узнали из линейного импульса и столкновений о линейном импульсе и столкновениях. Только в тех случаях, когда тело имеет большую пространственную протяженность, так что гравитационное поле неоднородно по всему его объему, центр тяжести и центр масс находятся в разных точках.Однако в практических ситуациях даже такие большие объекты, как здания или круизные лайнеры, находятся в однородном гравитационном поле на поверхности Земли, где ускорение свободного падения имеет постоянную величину g = 9,8 м/с 2 . В этих ситуациях центр тяжести идентичен центру масс. Поэтому на протяжении всей этой главы мы используем центр масс (ЦМ) как точку, к которой прикрепляется весовой вектор. Напомним, что ЦМ имеет особый физический смысл: при приложении внешней силы к телу точно в его ЦМ тело в целом совершает поступательное движение и такая сила не вызывает вращения.
Когда ЦМ расположен вне оси вращения, на объекте возникает чистый гравитационный момент . Гравитационный крутящий момент — это крутящий момент, вызванный весом. Этот гравитационный момент может вращать объект, если нет поддержки для его уравновешивания. Величина гравитационного момента зависит от того, насколько далеко от точки вращения находится ЦМ. Например, в случае с самосвалом (рис. \(\PageIndex{2}\)) точка опоры расположена на линии, где шины соприкасаются с поверхностью дороги.Если ЦМ расположен высоко над поверхностью дороги, гравитационный момент может быть достаточно большим, чтобы перевернуть грузовик. Легковые автомобили с низко расположенным КМ, близко к тротуару, более устойчивы к опрокидыванию, чем грузовые.
Рисунок \(\PageIndex{2}\): Распределение массы влияет на положение центра масс (ЦМ), к которому присоединен весовой вектор \(\vec{w}\). Если центр тяжести находится в пределах области опоры, грузовик возвращается в исходное положение после опрокидывания [см. левую панель в (b)].Но если центр тяжести находится вне области опоры, грузовик переворачивается [см. правую панель в (b)]. Оба транспортных средства в (b) находятся вне равновесия. Обратите внимание, что автомобиль в (а) находится в равновесии: низкое расположение его центра тяжести затрудняет его опрокидывание.
левую панель в (b)].Но если центр тяжести находится вне области опоры, грузовик переворачивается [см. правую панель в (b)]. Оба транспортных средства в (b) находятся вне равновесия. Обратите внимание, что автомобиль в (а) находится в равновесии: низкое расположение его центра тяжести затрудняет его опрокидывание.Примечание
Если наклонить коробку так, чтобы один край остался в контакте со столом под ним, то один край основания опоры станет стержнем. Пока центр тяжести ящика остается над основанием опоры, гравитационный момент поворачивает ящик обратно в исходное положение устойчивого равновесия.Когда центр тяжести перемещается за пределы основания опоры, гравитационный момент поворачивает ящик в противоположном направлении, и ящик переворачивается. Просмотрите эту демонстрацию, чтобы поэкспериментировать с устойчивыми и неустойчивыми положениями ящика.
Пример 12.1: Центр тяжести автомобиля
У легкового автомобиля с колесной базой 2,5 м 52 % веса приходится на передние колеса на ровной поверхности, как показано на рис. 12.4. Где находится ЦМ этого автомобиля относительно задней оси?
Рисунок \(\PageIndex{3}\): Распределение веса между осями автомобиля.Где находится центр тяжести?Стратегия
Мы не знаем вес w автомобиля. Все, что мы знаем, это то, что когда автомобиль стоит на ровной поверхности, 0,52w давит на поверхность в точках контакта передних колес и 0,48w давит на поверхность в точках контакта задних колес. При этом точки контакта разнесены друг от друга на расстояние d = 2,5 м. В этих контактных точках на автомобиль действуют силы нормальной реакции величиной F F = 0.52w и F R = 0,48w на переднюю и заднюю оси соответственно. Мы также знаем, что автомобиль является примером твердого тела, находящегося в равновесии, весь вес которого w действует на его ЦМ. ЦМ находится где-то между точками действия нормальных сил реакции, где-то на расстоянии x от точки действия F R . Наша задача найти х. Таким образом, мы определяем три силы, действующие на тело (автомобиль), и можем нарисовать диаграмму свободного тела для протяженного твердого тела, как показано на рисунке \(\PageIndex{4}\).
Рисунок \(\PageIndex{4}\): Диаграмма свободного тела автомобиля четко указывает векторы сил, действующих на автомобиль, и расстояния до центра масс (ЦМ). Когда в качестве точки поворота выбрана CM, эти расстояния являются плечами нормальных сил реакции. Обратите внимание, что векторные величины и плечи рычагов не обязательно изображать в масштабе, но все релевантные величины должны быть четко обозначены.Мы почти готовы записать условия равновесия Уравнение \ref{12.7} через Уравнение \ref{12.9} для автомобиля, но сначала мы должны определиться с системой отсчета. Предположим, мы выбираем ось x по длине автомобиля, ось y вертикальна, а ось z перпендикулярна этой плоскости xy. При таком выборе нам нужно написать только уравнение \ref{12.7} и уравнение \ref{12.9}, потому что все y-компоненты тождественно равны нулю. Теперь нам нужно определиться с расположением опорной точки. Мы можем выбрать любую точку в качестве местоположения оси вращения (оси z). Предположим, мы поместили ось вращения в CM, как показано на диаграмме свободного тела для автомобиля.Теперь мы готовы записать условия равновесия автомобиля.
Раствор
Каждое условие равновесия содержит только три члена, поскольку на автомобиль действует N = 3 силы. Первое условие равновесия, уравнение \ref{12.7}, читается как
.\[+F_{F} – w + F_{R} = 0 \ldotp \label{12.11}\]
Это условие тривиально выполняется, потому что, когда мы подставляем данные, уравнение \ref{12.11} становится +0,52w − w + 0,48w = 0. Второе условие равновесия, уравнение \ref{12.9}, читает
\[\tau_{F} + \tau_{w} + \tau_{R} = 0 \label{12.12}\]
где \(\tau_{F}\) – момент силы F F , \(\tau_{w}\) – момент силы тяжести w, а \(\tau_{R}\) – момент силы F R . Когда точка вращения расположена в СМ, гравитационный момент тождественно равен нулю, потому что плечо рычага веса по отношению к оси, проходящей через СМ, равно нулю. Линии действия обеих нормальных сил реакции перпендикулярны плечам их рычагов, поэтому в уравнении \ref{12.10} имеем |sin \(\theta\)| = 1 для обеих сил. Из диаграммы свободного тела мы читаем, что крутящий момент \(\tau_{F}\) вызывает вращение по часовой стрелке вокруг оси в CM, поэтому его смысл отрицательный; а крутящий момент \(\tau_{R}\) вызывает вращение против часовой стрелки вокруг оси в CM, поэтому его смысл положительный. С этой информацией мы запишем второе условие равновесия как
\[-r_{F} F_{F} + r_{R} F_{R} = 0 \ldotp \label{12.13}\]
С помощью диаграммы свободного тела мы определяем величины силы F R = 0.48w и F F = 0,52w, а соответствующие им плечи рычагов r R = x и r F = d − x. Теперь мы можем записать второе условие равновесия, уравнение \ref{12.13}, явно через неизвестное расстояние x:
\[-0,52(d – x)w + 0,48xw = 0 \ldotp \label{12.14}\]
Здесь вес w сокращается, и мы можем решить уравнение для неизвестного положения x ЦМ. Ответ: x = 0,52d = 0,52 (2,5 м) = 1,3 м. Решение Выбор точки поворота в положении переднего моста не меняет результат.Диаграмма свободного тела для этого положения поворота представлена на рис. 12.6. Для этого выбора точки разворота второе условие равновесия равно
.\[-r_{w} w + r_{R} F_{R} = 0 \ldotp \label{12.15}\]
Когда мы подставляем количества, указанные на диаграмме, мы получаем
\[-(d – x)w + 0,48dw = 0 \ldotp \label{12.16}\]
Ответ, полученный путем решения уравнения \ref{12.13}, снова равен x = 0,52d = 1,3 м.
Рисунок \(\PageIndex{5}\): эквивалентная диаграмма свободного кузова для автомобиля; точка опоры четко обозначена.Значение
Этот пример показывает, что при решении задач статического равновесия мы свободны в выборе точки опоры. Для разных вариантов точки разворота нам нужно решить разные наборы условий равновесия. Однако все варианты ведут к одному и тому же решению проблемы.
Упражнение 12.1
Решите пример 12.1, выбрав точку опоры в месте расположения задней оси.
Упражнение 12.2
Объясните, какая из следующих ситуаций удовлетворяет обоим условиям равновесия: (а) теннисный мяч, который не вращается при движении в воздухе; б) пеликан, парящий в воздухе с постоянной скоростью на одной высоте; или (c) коленчатый вал в двигателе припаркованного автомобиля.
Частный случай статического равновесия имеет место, когда все внешние силы на объект действуют на или вдоль оси вращения или когда пространственным расширением объекта можно пренебречь. В таком случае объект можно эффективно рассматривать как точечную массу. В этом особом случае нам не нужно беспокоиться о втором условии равновесия, уравнении \ref{12.9}, потому что все крутящие моменты тождественно равны нулю, а первое условие равновесия (для сил) является единственным условием, которое должно быть выполнено.Диаграмма свободного тела и стратегия решения проблем для этого особого случая были изложены в книге Ньютона «Законы движения и приложения законов Ньютона». В следующем примере вы увидите типичную ситуацию равновесия, включающую только первое условие равновесия.
Просмотрите эту демонстрацию, чтобы увидеть три груза, соединенных веревками над шкивами и связанными узлом. Вы можете поэкспериментировать с весами, чтобы увидеть, как они влияют на положение равновесия узла, и в то же время увидеть векторное представление первого условия равновесия в действии.
Пример 12.2: Разрывное напряжение
Небольшая кастрюля массой 42,0 г поддерживается двумя нитями, как показано на рис. 12.7. Максимальное натяжение, которое может выдержать струна, составляет 2,80 Н. Масса постепенно добавляется к чаше до тех пор, пока одна из струн не порвется. Какая это строка? Какое количество массы нужно добавить, чтобы это произошло?
Рисунок \(\PageIndex{6}\): Масса постепенно добавляется в чашу до тех пор, пока одна из нитей не порвется.Стратегия
Эта механическая система, состоящая из струн, грузов и чаши, находится в статическом равновесии.В частности, узел, который связывает струны со сковородой, находится в статическом равновесии. Узел можно рассматривать как точку; поэтому нам нужно только первое условие равновесия. Три силы, тянущие узел, — это натяжение \(\vec{T}_{1}\) в 5,0-см нити, натяжение \(\vec{T}_{2}\) в 10,0-см строка и вес \(\vec{w}\) кастрюли, удерживающей грузы. Мы принимаем прямоугольную систему координат с осью Y, направленной против направления силы тяжести, и рисуем диаграмму свободного тела для узла (см. рисунок 12.8). Чтобы найти компоненты натяжения, мы должны определить углы направления \(\alpha_{1}\) и \(\alpha_{2}\), которые струны образуют с горизонтальным направлением, которое является осью x. Как видно на рис. 12.7, нити составляют две стороны прямоугольного треугольника. Мы можем использовать теорему Пифагора, чтобы решить этот треугольник, показанный на рис. 12.8, и найти синус и косинус углов \(\alpha_{1}\) и \(\alpha_{2}\). Тогда мы можем разложить напряжения на их прямоугольные составляющие, подставив в первое условие равновесия (уравнение \ref{12.7} и уравнение \ref{12.8}), и определите натяжение струн. Сначала порвется струна с большим натяжением.
Рисунок \(\PageIndex{7}\): Диаграмма свободного тела для узла в примере 12.2.Раствор
Вес w, натягивающий узел, обусловлен массой M лотка и массой m, добавленной к лотку, или w = (M + m)g. С помощью диаграммы свободного тела на рис. 12.8 мы можем установить условия равновесия узла:
в направлении x, \[-T_{1x} + T_{2x} = 0\] в направлении y, \[+T_{1y} + T_{2y} – w = 0 \ldotp\]
Из диаграммы свободного тела величины компонентов в этих уравнениях равны
\[\begin{split} T_{1x} & = T_{1} \cos \alpha_{1} = \frac{T_{1}}{\sqrt{5}},\quad T_{1y} = T_ {1} \sin \alpha_{1} = \frac{2T_{1}}{\sqrt{5}} \\ T_{2x} & = T_{2} \cos \alpha_{2} = \frac{2T_ {2}}{\sqrt{5}},\quad T_{2y} = T_{2} \sin \alpha_{2} = \frac{T_{2}}{\sqrt{5}} \ldotp \end {разделить}\]
Подставляем эти компоненты в условия равновесия и упрощаем.Тогда мы получаем два уравнения равновесия для напряжений:
в направлении x, \[T_{1} = 2T_{2}\]
в направлении Y, \[\frac{2T_{1}}{\sqrt{5}} + \frac{T_{2}}{\sqrt{5}} = (M + m)g \ldotp\]
Уравнение равновесия для направления x говорит нам, что натяжение T 1 нити длиной 5,0 см вдвое превышает натяжение T 2 нити длиной 10,0 см. Следовательно, более короткая струна порвется. Когда мы используем первое уравнение, чтобы исключить T 2 из второго уравнения, мы получаем соотношение между массой m на чашке и натяжением T 1 в более короткой струне:
\[\ гидроразрыва{2.{2}} – 0,042\; кг = 0,277\; кг = 277,0\; г \ldotp\]
Значение
Предположим, что механическая система, рассматриваемая в этом примере, прикреплена к потолку внутри поднимающегося лифта. Пока лифт движется вверх с постоянной скоростью, результат останется прежним, потому что вес w не изменится. Если лифт движется вверх с ускорением, критическая масса меньше, потому что вес M + m становится больше на кажущийся вес из-за ускорения лифта.Тем не менее, во всех случаях более короткая струна рвется первой.
Авторы и авторство
Сэмюэл Дж. Линг (Государственный университет Трумэна), Джефф Санни (Университет Лойолы Мэримаунт) и Билл Моебс, а также многие другие авторы. Эта работа находится под лицензией OpenStax University Physics в соответствии с лицензией Creative Commons Attribution License (4.0).
12.2 Примеры статического равновесия – University Physics Volume 1
Силы в предплечье
Тяжелоатлет держит 50.весом 0 фунтов (эквивалент 222,4 Н) на предплечье, как показано на рис. 12.11. Его предплечье расположено под углом β=60°β=60° по отношению к плечу. Предплечье поддерживается сокращением двуглавой мышцы, что вызывает крутящий момент вокруг локтя. Предполагая, что напряжение в двуглавой мышце действует в вертикальном направлении, заданном силой тяжести, какое напряжение должна проявить мышца, чтобы удерживать предплечье в показанном положении? Какая сила действует на локтевой сустав? Предположим, что вес предплечья пренебрежимо мал.Дайте окончательные ответы в единицах СИ. Фигура 12.11 Предплечье вращается вокруг локтя ( E ) за счет сокращения двуглавой мышцы, что вызывает напряжение T→M.T→M.Стратегия
Мы выделяем три силы, действующие на предплечье: неизвестная сила F→F→ в локтевом суставе; неизвестное напряжение T→MT→M в мышце; и вес w→w→ с величиной w=50lb.w=50lb. Мы принимаем систему отсчета с осью x вдоль предплечья и осью в локте.Вертикальное направление — это направление веса, которое совпадает с направлением плеча. Ось x составляет угол β=60°β=60° с вертикалью. Ось y перпендикулярна оси x . Теперь настроим диаграмму свободного тела для предплечья. Во-первых, мы рисуем оси, точку вращения и три вектора, представляющие три идентифицированные силы. Затем мы находим угол ββ и представляем каждую силу ее компонентами x и y , не забывая зачеркивать исходный вектор силы, чтобы избежать двойного счета.Наконец, мы обозначим силы и их плечи. Диаграмма свободного тела для предплечья показана на рисунке 12.12. На данный момент мы готовы установить условия равновесия для предплечья. Каждая сила имеет x – и y -компонент; следовательно, у нас есть два уравнения для первого условия равновесия, по одному уравнению для каждого компонента чистой силы, действующей на предплечье.Фигура 12.12 Диаграмма свободного тела для предплечья: точка вращения находится в точке E (локоть).
Обратите внимание, что в нашей системе отсчета вклад во второе условие равновесия (для крутящих моментов) поступает только от y -компонентов сил, поскольку все x -компоненты сил параллельны плечам рычага, поэтому что для любого из них мы имеем sinθ=0sinθ=0 в уравнении 12.10. Для компонентов y мы имеем θ=±90°θ=±90° в уравнении 12.10. Также обратите внимание, что крутящий момент силы в локте равен нулю, потому что эта сила приложена к оси вращения.Таким образом, вклад в чистый крутящий момент поступает только от крутящих моментов TyTy и wy.wy.
Решение
Мы видим из диаграммы свободного тела, что x -компонент чистой силы удовлетворяет уравнению +Fx+Tx-wx=0+Fx+Tx-wx=012.21
и y -компонент чистой силы удовлетворяет
+Fy+Ty-wy=0.+Fy+Ty-wy=0.12.22
Уравнение 12.21 и Уравнение 12.22 представляют собой два уравнения первого условия равновесия (для сил).Далее из диаграммы свободного тела читаем, что чистый крутящий момент вдоль оси вращения равен
. +rTTy-rwwy=0.+rTTy-rwwy=0.12.23
Уравнение 12.23 является вторым условием равновесия (для крутящих моментов) для предплечья. Диаграмма свободного тела показывает, что плечи рычага rT=1,5 дюйма. rT=1,5 дюйма. и rw=13,0 дюймов. rw=13,0 дюймов. На данный момент нам не нужно преобразовывать дюймы в единицы СИ, потому что, пока эти единицы непротиворечивы в уравнении 12.23, они сокращаются. Снова используя диаграмму свободного тела, находим величины составляющих сил:
Fx=Fcosβ=Fcos60°=F/2Tx=Tcosβ=Tcos60°=T/2wx=wcosβ=wcos60°=w/2Fy=Fsinβ=Fsin60°=F3/2Ty=Tsinβ=Tsin60°=T3/2wy=wsinβ=wsin60 °=w3/2.Fx=Fcosβ=Fcos60°=F/2Tx=Tcosβ=Tcos60°=T/2wx=wcosβ=wcos60°=w/2Fy=Fsinβ=Fsin60°=F3/2Ty=Tsinβ=Tsin60°=T3/2wy=wsinβ=wsin60 °=w3/2.Мы подставляем эти величины в уравнения 12.21, уравнения 12.22 и уравнения 12.23, чтобы получить, соответственно,
F/2+T/2−w/2=0F3/2+T3/2−w3/2=0rTT3/2−rww3/2=0.F/2+T/2−w/2=0F3/2+ T3/2-w3/2=0rTT3/2-rww3/2=0.Когда мы упрощаем эти уравнения, мы видим, что у нас остается только два независимых уравнения для двух неизвестных величин силы, F и T , потому что уравнение 12.21 для компонента x эквивалентно уравнению 12.22 для компонента y . Таким образом, мы получаем первое условие равновесия сил
и второе условие равновесия моментов
rTT-rww=0.rTT-rww=0.12.25
Величина напряжения мышцы получается путем решения уравнения 12.25:
T=rwrTw=13,01,5(50 фунтов)=43313lb≃433,3lb.T=rwrTw=13,01,5(50 фунтов)=43313lb≃433,3lb.Сила в локте определяется путем решения уравнения 12.24:
F=w-T=50,0lb-433,3lb=-383,3lb.F=w-T=50,0lb-433,3lb=-383,3lb.Знак минус в уравнении говорит нам о том, что фактическая сила в локте антипараллельна рабочему направлению, выбранному для построения диаграммы свободного тела. В окончательном ответе мы переводим силы в единицы силы СИ. Ответ
F=383,3 фунта=383,3(4,448 Н)=1705 Н внизT=433,3 фунта=433,3(4,448 Н)=1927 Н вверх. вверх.Значение
Здесь стоит отметить два важных момента.Первый касается преобразования в единицы СИ, которое можно выполнить в самом конце решения, если мы сохраняем согласованность в единицах. Второй важный вопрос касается шарнирных соединений, таких как локтевой. При начальном анализе задачи всегда следует исходить из того, что шарнирные соединения создают силу в произвольном направлении , а затем вы должны решать все компоненты шарнирной силы независимо друг от друга. В этом примере усилие локтя оказывается вертикальным, потому что в задаче предполагается, что напряжение бицепса также является вертикальным.Однако такое упрощение не является общим правилом.Решение
Предположим, мы принимаем систему отсчета с направлением оси y вдоль груза весом 50 фунтов и точкой вращения, расположенной в локте. В этой системе отсчета все три силы имеют только y -компонент, поэтому у нас есть только одно уравнение для первого условия равновесия (для сил). Нарисуем диаграмму свободного тела для предплечья, как показано на рис. 12.13, указав точку опоры, действующие силы и их плечи относительно оси вращения, а также углы θTθT и θwθw, при которых силы T→MT→M и w→ w→ (соответственно) сделать своими плечами.В определении крутящего момента, заданном уравнением 12.10, угол θTθT представляет собой угол направления вектора T→M,T→M, отсчитываемый на 90 505 против часовой стрелки на 90 007 от радиального направления плеча рычага, которое всегда указывает в сторону от оси вращения. По тому же соглашению угол θwθw измеряется 90 505 против часовой стрелки 90 007 от радиального направления плеча рычага до вектора w→.w→. Таким образом, ненулевые крутящие моменты проще всего вычислить путем прямой подстановки в уравнение 12.10 следующим образом: τT=rTTsinθT=rTTsinβ=rTTsin60°=+rTT3/2τw=rwwsinθw=rwwsin(β+180°)=−rwwsinβ=−rww3/2.τT=rTTsinθT=rTTsinβ=rTTsin60°=+rTT3/2τw=rwwsinθw=rwwsin(β+180°)=−rwwsinβ=−rww3/2.Фигура 12.13 Диаграмма свободного тела для предплечья для эквивалентного решения. Ось расположена в точке Е (локоть).
Второе условие равновесия, τT+τw=0,τT+τw=0, теперь можно записать как
rTT3/2-rww3/2=0.rTT3/2-rww3/2=0.12.26
Из диаграммы свободного тела первое условие равновесия (для сил) равно
−F+T−w=0.−F+T−w=0.12.27
Уравнение 12.26 идентично уравнению 12.25 и дает результат T=433,3 фунта. T=433,3 фунта. Уравнение 12.27 дает
F=T−w=433,3 фунта−50,0 фунта=383,3 фунта. F=T−w=433,3 фунта−50,0 фунта=383,3 фунта.Мы видим, что эти ответы идентичны нашим предыдущим ответам, но второй выбор системы отсчета приводит к эквивалентному решению, которое проще и быстрее, поскольку не требует разложения сил на их прямоугольные составляющие.
Практика. Гиперучебник по физике
Для всех решений пусть T 1 будет кабелем слева, а T 2 — кабелем справа.Знак всегда имеет вес ( W ), который указывает вниз. Знак никуда не движется (не ускоряется), поэтому три силы находятся в равновесии. Опишите это состояние на языке физики — уравнениями; в частности, уравнения компонентного анализа. Как всегда, сделайте хороший рисунок, чтобы показать, что происходит. Используйте линейку и транспортир, если хотите.
Два восходящих компонента должны быть равны друг другу. Вместе они должны равняться весу, а это значит, что каждый несет половину нагрузки.
T 1 T 2 = ½ W
T 1 = T 2 = ½ (100 n)
T 1 = T 2 = 50 NГруз указывает вниз (270°) и T 1 указывает влево (180°). Оба эти вектора хороши — хороши в том смысле, что с ними легко иметь дело. T 1 нарушитель спокойствия.Разбейте его на составляющие и сформулируйте условия равновесия в вертикальном и горизонтальном направлениях. Мне нравится размещать отрицательные векторы слева от знака равенства, а положительные векторы — справа. Я также предлагаю сначала поработать над вертикальным уравнением.
горизонтальный ∑ F − x = ∑ F + x Т 1 = T 2 cos θ 2 Т 1 = 141 N cos 45° Т 1 = 100 Н вертикальный ∑ F − y = ∑ Ж + у Вт = T 2 sinθ 2 Т 2 = Ш = 100 Н sin θ 2 грех 45° Т 2 = 141 Н Вес — единственная сила с удобным направлением.Разложите напряжения на их составляющие. Сформулируйте условие равновесия по обеим осям. Я предлагаю сначала поработать с горизонтальным уравнением.
горизонтальный ∑ F − x = ∑ F + x T 1 cos θ 1 = T 2 cos θ 2 вертикальный ∑ F − y = ∑ Ж + у Вт = T 1 sinθ 1 + T 2 sin θ 2 Вот и конец физики.Остальная часть работы — математика. Решите горизонтальное уравнение для T 1 .
Т 1 = Т 2 cos θ 2 cos θ 1 Подставьте результат в вертикальное уравнение.
Ш = Т 2 cos θ 2 sin θ 1 + T 2 sin θ 2 cos θ 1 Решите это для T 2 , замените значения и вычислите T 2 .
Т 2 = Ш (sin θ 1 cos θ 2 )/(cos θ 1 + sin θ 2 ) Т 2 = 100 Н (sin 60° cos 30°)/(cos 60° + sin 30°) T 2 = 50,0 N Подставляем обратно в горизонтальное уравнение и вычисляем T 1 .
Т 1 = Т 2 cos θ 2 cos θ 1 Т 1 = 50,0 Н cos 30° cos 60° T 1 = 86,6 N
Боже, последнее было не очень весело.Посмотрим, нет ли более простого решения. Мы использовали компонентный анализ, так как это подход по умолчанию. Всякий раз, когда вам дана куча векторов и вам нужно их объединить, лучше всего использовать компоненты, особенно если вы не ожидаете каких-либо особых отношений между векторами. Мы постоянно используем этот безмозглый, грубый подход к решению проблем. Поймите правила, опишите их с помощью понятных компьютеру команд, вставьте числа, получите ответы.
Однако иногда можно найти умные решения.Они не работают все время, но когда они работают, мы должны их использовать. В этой практической задаче векторы подстроены так, что альтернативное решение проще, чем решение по умолчанию. Графический метод сложения векторов требует размещения их лицом к хвосту. Сумма будет результирующим вектором, соединяющим хвост первого вектора с головой последнего. Когда силы находятся в равновесии, их сумма равна нулю, и их не будет равнодействующей. Это означает, что в этой практической задаче должна быть возможность расположить три вектора в замкнутую фигуру — треугольник.Давай попробуем.
Это то, что мы называем вырожденным треугольником. Конечно, у него есть три стороны, но он не покрывает никакой площади. Две короткие стороны лежат поверх длинной стороны. Симметрия говорит нам, что две короткие стороны должны иметь одинаковую длину. Таким образом, каждое напряжение равняется половине веса. Об этом мы уже говорили, поэтому преимущества у этого метода перед предыдущим нет.
T 1 T 2 = ½ W
T 1 = T 2 = ½ (100 n)
T 1 = T 2 = 50 NУвеличить
Горизонтальное натяжение и вертикальный вес являются катетами треугольника 45–45–90, гипотенуза которого является диагональным натяжением.Эти силы должны составлять соотношение 1:1:√2.
Т 1 = Ш = Т 2 1 1 √2 Т 1 = 100 Н = Т 2 1 1 √2 Т 1 = 1(100 Н) Т 1 = 100 Н T 2 = √2(100 Н) T 2 = 141 N Увеличить
Два напряжения — это катеты треугольника 30–60–90, а вес — гипотенуза.Это означает, что стороны должны образовывать соотношение 1:√3:2. Просто убедитесь, что натяжение соответствует правильным частям этого соотношения.
Т 2 = Т 1 = Ш 1 √3 2 Т 2 = Т 1 = 100 Н 1 √3 2 Т 1 = √3 100 Н 2 T 1 = 86.6 Н Т 2 = 1 100 Н 2 T 2 = 50,0 N Увеличить
Вероятно, есть и другие способы решения этой проблемы.
Напишите что-нибудь совсем другое.
Формула статического трения
Статическое трение — это сила, удерживающая объект в состоянии покоя. Его необходимо преодолеть, чтобы начать перемещение объекта. Когда объект находится в движении, он испытывает кинетическое трение. Если к объекту приложена небольшая сила, трение покоя имеет равную величину в противоположном направлении. Если усилие увеличить, то в какой-то момент будет достигнуто значение максимального трения покоя, и объект начнет двигаться. Коэффициенту статического трения присваивается греческая буква «мю» (μ) с нижним индексом «с».Максимальная сила статического трения в μ с раз превышает нормальную силу, действующую на объект.
сила трения покоя ≤ (коэффициент трения покоя) (нормальная сила) максимальная сила статического трения = (коэффициент статического трения)(нормальная сила)
F с ≤ μ с η и F с max = μ с η
F s = сила трения покоя
μ с = коэффициент статического трения
η = нормальная сила (греческая буква «эта»)
≤ означает «меньше или равно»
F s max = максимальная сила трения покоя
Формула трения покоя Вопросы:
1) К салазкам с дровами в заснеженном лесу приложена сила 5500 Н.Лыжи саней имеют коэффициент трения покоя мк с = 0,75 со снегом. Если полностью загруженные сани имеют массу 700 кг, какова максимальная сила трения покоя и достаточно ли приложенной силы для ее преодоления?
Ответ: На плоской поверхности нормальная сила, действующая на объект, равна η = мг. Используя это, можно найти максимальную силу статического трения:
F с макс = μ с η
F с макс = μ с мг
F с макс = (0.75)(700 кг)(9,8 м/(с) 2 ))
F s max = 5145 кг∙м/с 2
F с макс. = 5145 N
Максимальная сила трения покоя равна 5145 Н, а значит, приложенной силы 5500 Н достаточно, чтобы ее преодолеть, и сани тронуться.
2) Человек, строящий машину для производства кирпича, хочет измерить коэффициент статического трения между кирпичом и деревом. Для этого она ставит 2.00 кг кирпича на плоский кусок дерева, и постепенно прикладывая все большую силу, пока кирпич не сдвинется с места. Она обнаружила, что кирпич двигается, когда к нему приложена сила ровно 11,8 Н. Что такое коэффициент статического трения?
Ответ: Приложенная сила была достаточной для преодоления статического трения, поэтому она равна F с max . На плоской поверхности нормальная сила, действующая на объект, равна η = мг . Коэффициент трения покоя можно найти, переформулировав формулу максимальной силы трения покоя:
мк с = 0.6020…
Дайте ответ с тремя значащими цифрами, чтобы соответствовать другим числам в уравнении:
мк с ≈ 0,602
Находим коэффициент статического трения между кирпичом и деревом равным 0,602.
Уравнение равновесия – обзор
Уравнения равновесия могут быть записаны для каждого сустава по очереди в терминах коэффициентов натяжения и координат суставов, отнесенных к какой-либо удобной системе координат. Решение этих уравнений дает T AB , и т. Д., Откуда T AB = T AB L AB , в котором L AB , если не приведено, может быть рассчитано используя теорему Пифагора, т.е.е. LAB=(xB−xA)2+(yB−yA)2. Снова исходное предположение о растяжении элемента приводит к отрицательным значениям, соответствующим сжатию. Обратите внимание на порядок суффиксов в уравнениях (4.3) и (4.4).
Пример 4.6Определить усилия в элементах шарнирной фермы, показанной на рис. 4.21.
Рисунок 4.21. Расчет фермы с использованием коэффициентов растяжения (пример 4.6).
Сначала рассчитываются опорные реакции, как показано на рис. 4.21.
Следующим шагом является выбор системы осей xy , а затем вставка координат сустава в диаграмму.На рис. 4.21 мы выберем опорную точку А в качестве начала осей, хотя на самом деле будет достаточно любого шарнира; тогда координаты соединения будут такими, как показано.
Опять же, как и в методе соединений, решение может начинаться только с соединения, в котором имеется не более двух неизвестных сил, в данном случае соединений A и E. Теоретически не имеет значения, с какого из этих соединений начинается анализ но поскольку A является началом осей, мы начнем с A. Обратите внимание, что нет необходимости вставлять стрелки для указания направления сил на стержни, поскольку предполагается, что стержни находятся в напряжении, а направления компонентов сил на стержнях равны задается автоматически при записи через коэффициенты натяжения и координаты соединения (уравнения (4.3) и (4.4)).
Уравнения равновесия в стыке A:
(i)xdirection:tAB(xB−xA)+tAC(xC−xA)−RA,H=0
(ii)ydirection:tAB(yB−yA)+ tAC(yC−yA)−RA,V=0
Подставляя значения R A,H , R A,V и совместные координаты в уравнениях (i) и (ii), получаем , из уравнения (i),
tAB(0–0)+tAC(1,5–0)–3=0
откудаtAC=+2,0
и из уравнения (ii)tAB(1,5-0)+tAC(0-0)+1=0·
, так чтоtAB=-0.67
Из вывода уравнений (4.3) и (4.4) видно, что единицами коэффициента натяжения являются сила/единица длины, в данном случае кН/м. Однако, как правило, мы опускаем единицы измерения.
Теперь мы можем перейти к соединению B, в котором, поскольку t BA (= t AB ) были вычислены, имеются две неизвестные
(iii)xdirection:tBA(xA−xB)+ tBC(xC-xB)+tBD(xD-xB)+3=0
(iv)ydirection:tBA(yA-yB)+tBC(yC-yB)+tBD(yD-yB)=0
Подстановка значений совместных координат и t BA в уравнениях (iii) и (iv) мы имеем, из уравнения.(iii)−0,67(0−0)+tBC(1,5−0)+tBD(1,5−0)+3=0
, что упрощается до(v)1,5tBC+1,5tBD+3=0
и из уравнения . (iv)-0,67(0-1,5)+tЧХ(0-1,5)+tBD(1,5-1,5)=0
откудаtЧХ=+0,67
Следовательно, из уравнения (v)
tBD=−2,67
Теперь в стыке D имеется только две неизвестные силы-члены. Следовательно, в D
(vi)xdirection:tDB(xB−xD)+tDF(xF−xD)+tDC( xC−xD)=0
(vii)ydirection:tDB(yB−yD)+tDF(yF−yD)+tDC(yC−yD)–5=0
Подстановка значений совместных координат и ранее рассчитанного значения t DB (= t BD ) в уравнениях (vi) и (vii) мы получаем, из уравнения.(vi)
-2,67(0-1,5)+tDF(3,0-1,5)+tDC(1,5-1,5)-5=0
, так чтоtDF=-2,67
и из уравнения (vii)−2,67(1,5−1,5)+tDF(1,5−1,5)+tDC(0−1,5)=0
, откудаtDC=–3,33
Затем решение переходит к соединению C, чтобы получить t CF и t CE или соединение F для определения t FC и t FE ; Соединение F было бы предпочтительнее, поскольку в точке F встречается меньше стержней, чем в точке C. Наконец, оставшийся неизвестный коэффициент натяжения ( t EC или t EF ) находится при рассмотрении равновесия соединения E.Тогда
tFC=+2,67,tFE=-2,67,tEC=0
, что читатель должен проверить.Силы в элементах фермы теперь рассчитываются путем умножения коэффициентов растяжения на длины элементов, т.е. (натяжение)TBC=tBCLBC
, в которомLBC=(xB−xC)2+(yB−yC)2=(0−1,5)2+(1,5−0)2=2,12 м
Затем
TBC=+ 0,67×2,12=+1,42 кН (натяжение)
Обратите внимание, что при расчете длин стержней не имеет значения, в каком порядке координаты соединения указаны в скобках, поскольку скобки квадратные.Также
TBD=tBDLBD=-2,67×1,5=-4,0 кН(сжатие)
Аналогично
TDF=-4,0 кН(сжатие)TDC=-5,0 кН(сжатие)TFC=+5,67 кН(растяжение)TFE=- 4,0 кН(сжатие)TEC=0
12.2 Примеры статического равновесия – University Physics Volume 1
Цели обучения
К концу этого раздела вы сможете:
- Выявление и анализ ситуаций статического равновесия
- Настройка диаграммы свободного тела для протяженного объекта в статическом равновесии
- Установить и решить условия статического равновесия для объектов, находящихся в равновесии в различных физических ситуациях
Все примеры в этой главе — плоские задачи.Соответственно, мы используем условия равновесия в компонентной форме от рисунка к рисунку. Мы представили стратегию решения проблем на рисунке, чтобы проиллюстрировать физический смысл условий равновесия. Теперь мы обобщаем эту стратегию в виде списка шагов, которым необходимо следовать при решении задач статического равновесия протяженных твердых тел. Мы действуем в пять практических шагов.
Стратегия решения проблем: статическое равновесие
- Определите объект для анализа. Для некоторых систем, находящихся в равновесии, может оказаться необходимым рассмотреть более одного объекта.Определить все силы, действующие на объект. Определите вопросы, на которые вам нужно ответить. Найдите информацию, указанную в задаче. В реальных задачах некоторая ключевая информация может быть скрыта в ситуации, а не предоставляться явно.
- Настройте диаграмму свободного тела для объекта. (a) Выберите систему отсчета x y для задачи. Нарисуйте диаграмму свободного тела для объекта, включая только силы, действующие на него. Когда это возможно, представьте силы в терминах их компонентов в выбранной системе отсчета.Делая это для каждой силы, вычеркните первоначальную силу, чтобы ошибочно не включать одну и ту же силу дважды в уравнения. Обозначьте все силы — это понадобится вам для правильного расчета результирующих сил в направлениях x и y . Для неизвестной силы направление должно быть задано произвольно; думайте об этом как о «рабочем направлении» или «предполагаемом направлении». Правильное направление определяется знаком, который вы получаете в окончательном решении. Знак плюс [латекс](+)[/латекс] означает, что рабочее направление является фактическим направлением.Знак минус [латекс](-)[/латекс] означает, что фактическое направление противоположно предполагаемому рабочему направлению. (b) Выберите положение оси вращения; другими словами, выберите точку вращения, относительно которой вы будете вычислять моменты действующих сил. На схеме свободного тела укажите расположение оси вращения и плеч рычагов действующих сил — это понадобится вам для корректного расчета моментов. При выборе шарнира имейте в виду, что шарнир можно разместить где угодно, но основной принцип заключается в том, что лучший выбор максимально упростит расчет чистого крутящего момента вдоль оси вращения.
- Составьте уравнения равновесия объекта. (a) Используйте диаграмму свободного тела, чтобы написать правильный рисунок условия равновесия для компонентов силы в направлении x . (b) Используйте диаграмму свободного тела, чтобы написать правильный рисунок условий равновесия для компонентов силы в направлении y . (c) Используйте диаграмму свободного тела, чтобы написать правильный рисунок условия равновесия для крутящих моментов вдоль оси вращения. Используйте рисунок, чтобы оценить величины крутящего момента и ощущения.
- Упростите и решите систему уравнений равновесия, чтобы получить неизвестные величины. На данный момент ваша работа связана только с алгеброй. Имейте в виду, что количество уравнений должно совпадать с количеством неизвестных. Если количество неизвестных больше, чем количество уравнений, задача не может быть решена.
- Оцените выражения для неизвестных величин, которые вы получили в своем решении. Ваши окончательные ответы должны иметь правильные числовые значения и правильные физические единицы.Если это не так, используйте предыдущие шаги, чтобы отследить ошибку до ее происхождения и исправить ее. Кроме того, вы можете самостоятельно проверить свои числовые ответы, переместив точку опоры в другое место и решив задачу снова, что мы и сделали на рисунке.
Обратите внимание, что создание диаграммы свободного тела для задачи равновесия твердого тела является наиболее важным компонентом в процессе решения. Без правильной настройки и правильной схемы вы не сможете записать правильные условия равновесия.Также обратите внимание, что диаграмма свободного тела для протяженного твердого тела, которое может совершать вращательное движение, отличается от диаграммы свободного тела для тела, которое испытывает только поступательное движение (как вы видели в главах, посвященных законам движения Ньютона). В поступательной динамике тело представляется в виде его ЦМ, где все силы, действующие на тело, присоединены, а крутящие моменты не возникают. Это неверно в динамике вращения, где протяженное твердое тело не может быть представлено одной точкой. Причина этого в том, что при анализе вращения мы должны выделить моменты, действующие на тело, а момент зависит как от действующей силы, так и от плеча его рычага.Здесь диаграмма свободного тела для расширенного твердого тела помогает нам определить внешние крутящие моменты.
Пример
Баланс крутящего момента
Три груза прикреплены к универсальной измерительной рейке, как показано на рисунке. Масса метрового стержня составляет 150,0 г, а массы слева от точки опоры равны [латекс]{м}_{1}=50,0\,\текст{г}[/латекс] и [латекс]{м}_ {2}=75,0\,\text{g}.[/latex] Найдите массу [латекс]{м}_{3}[/латекс], которая уравновешивает систему, когда она прикреплена к правому концу стержня, и нормальная сила реакции в точке опоры, когда система уравновешена.
Рисунок 12.9 В балансире крутящего момента горизонтальная балка поддерживается в точке опоры (обозначенной буквой S), а массы прикреплены к обеим сторонам точки опоры. Система находится в статическом равновесии, когда балка не вращается. Он уравновешен, когда луч остается ровным.Стратегия
Для устройства, показанного на рисунке, мы идентифицируем следующие пять сил, действующих на измерительную рейку:
[латекс]{w}_{1}={m}_{1}г[/латекс] вес массы [латекс]{м}_{1};[/латекс] [латекс]{w} _{2}={m}_{2}g[/latex] – вес массы [латекса]{m}_{2};[/latex]
[латекс]w=мг[/латекс] — вес всей метровой палочки; [latex]{w}_{3}={m}_{3}g[/latex] – вес неизвестной массы [latex]{m}_{3};[/latex]
[латекс]{F}_{S}[/латекс] — нормальная сила реакции в точке опоры S .
Мы выбираем систему отсчета, в которой направление оси y является направлением силы тяжести, направление оси x вдоль измерительной линейки, а ось вращения (ось z ) перпендикулярна оси x и проходит через точку опоры S . Другими словами, мы выбираем точку опоры в точке, где измерительный стержень касается опоры. Это естественный выбор для точки поворота, потому что эта точка не перемещается при вращении стержня.Теперь мы готовы настроить диаграмму свободного тела для измерительной линейки. Мы указываем точку опоры и присоединяем пять векторов, представляющих пять сил, вдоль линии, представляющей измерительную линейку, размещая силы относительно фигуры оси. На этом этапе мы можем определить плечи рычагов пяти сил, учитывая информацию, представленную в задаче. Для трех висящих масс задача об их расположении вдоль стержня является явной, но информация о расположении груза w дается неявно.Ключевое слово здесь «однородный». Из наших предыдущих исследований мы знаем, что ЦМ однородной палочки находится в ее середине, поэтому мы прикрепляем вес w на отметке 50 см.
Рисунок 12.10 Диаграмма свободного тела для измерительной линейки. Точка опоры выбирается в точке опоры S.Решение
Используя рисунок и рисунок для справки, мы начнем с нахождения плеч рычага пяти сил, действующих на палку:
[латекс]\begin{array}{ccc}\hfill {r}_{1}& =\hfill & 30. \ circ = \ text {− }{r}_{3}{m}_{3}g\hfill & & \text{(вращение по часовой стрелке, отрицательное направление)}\hfill \end{array}[/latex]
Второе условие равновесия (уравнение крутящих моментов) для измерительной линейки:
[латекс] {\ тау } _ {1} + {\ тау } _ {2} + \ тау + {\ тау } _ {S} + {\ тау} _ {3} = 0.[/латекс]
При подстановке значений крутящего момента в это уравнение мы можем опустить крутящие моменты, дающие нулевой вклад. Таким образом, второе условие равновесия равно
.[латекс]+{r}_{1}{m}_{1}g+{r}_{2}{m}_{2}g+rmg-{r}_{3}{m}_{ 3}г=0.[/латекс]
Выбор направления [латекс]+y[/латекс] параллельно первому условию равновесия [латекс]{\mathbf{\overset{\to} {F}}}_{S},[/латекс] палка
[латекс]\текст{−}{w}_{1}-{w}_{2}-w+{F}_{S}-{w}_{3}=0.[/latex]
Заменяя силы, первое условие равновесия становится
[латекс]\текст{−}{m}_{1}g-{m}_{2}g-mg+{F}_{S}-{m}_{3}g=0.[/латекс]
Мы решаем эти уравнения одновременно для неизвестных значений [латекс]{м}_{3}[/латекс] и [латекс]{F}_{S}.[/латекс] На рисунке мы исключаем множитель г и переставить члены, чтобы получить
[латекс]{r}_{3}{m}_{3}={r}_{1}{m}_{1}+{r}_{2}{m}_{2}+rm .[/латекс]
Чтобы получить [латекс]{м}_{3}[/латекс], мы делим обе части на [латекс]{г}_{3},[/латекс], так что у нас есть
[латекс]\begin{array}{cc} \hfill {m}_{3}& =\frac{{r}_{1}}{{r}_{3}}\,{m}_{ 1}+\frac{{r}_{2}}{{r}_{3}}\,{m}_{2}+\frac{r}{{r}_{3}}\,m \hfill \\ & =\frac{70}{30}\,(50.{2}}=5.8\,\text{N}.\hfill \end{массив}[/latex]
Значение
Обратите внимание, что Figure не зависит от значения g . Таким образом, баланс крутящего момента можно использовать для измерения массы, поскольку изменения значений г на поверхности Земли не влияют на эти измерения. Это не относится к пружинным балансам, потому что они измеряют силу.
Проверьте свое понимание
Повторите рисунок, используя левый конец стержня для расчета крутящего момента; то есть, поместив ось на левый конец измерительной палки.
Show Solution316,7 г; 5.8 Н
В следующем примере мы покажем, как использовать первое условие равновесия (уравнение для сил) в векторной форме, представленной на рисунке и рисунке. Мы представляем это решение, чтобы проиллюстрировать важность правильного выбора системы отсчета. Хотя все инерциальные системы отсчета эквивалентны и численные решения, полученные в одной системе отсчета, такие же, как и в любой другой, неправильный выбор системы отсчета может сделать решение довольно длинным и запутанным, тогда как разумный выбор системы отсчета делает решение простым.\circ[/latex] относительно его плеча. Предплечье поддерживается сокращением двуглавой мышцы, что вызывает крутящий момент вокруг локтя. Предполагая, что напряжение в двуглавой мышце действует в вертикальном направлении, заданном силой тяжести, какое напряжение должна проявить мышца, чтобы удерживать предплечье в показанном положении? Какая сила действует на локтевой сустав? Предположим, что вес предплечья пренебрежимо мал. Дайте окончательные ответы в единицах СИ.
Рисунок 12.11 Предплечье вращается вокруг локтя (E) за счет сокращения двуглавой мышцы, что вызывает напряжение [латекс] {\ mathbf {\ overset {\ to } {T}}} _ {\ text {M} }.[/латекс]Стратегия
Мы идентифицируем три силы, действующие на предплечье: неизвестная сила [латекс]\mathbf{\overset{\to}}{F}}[/латекс] в локтевом суставе; неизвестное напряжение [латекс]{\mathbf{\overset{\to}}{T}}}_{\text{M}}[/latex] в мышце; и вес [латекс]\mathbf{\overset{\to }{w}}[/латекс] с величиной [латекс]w=50\,\текст{фунт}.[/латекс] Мы принимаем систему отсчета с ось x вдоль предплечья и оси в локтевом суставе. Вертикальное направление — это направление веса, которое совпадает с направлением плеча.\circ[/latex] с вертикальным. Ось y перпендикулярна оси x . Теперь настроим диаграмму свободного тела для предплечья. Во-первых, мы рисуем оси, точку вращения и три вектора, представляющие три идентифицированные силы. Затем мы находим угол [латекс]\бета[/латекс] и представляем каждую силу ее компонентами x и y , не забывая зачеркивать исходный вектор силы, чтобы избежать двойного счета. Наконец, мы обозначим силы и их плечи.Диаграмма свободного тела для предплечья показана на рисунке. На данный момент мы готовы установить условия равновесия для предплечья. Каждая сила имеет x – и y -компонент; следовательно, у нас есть два уравнения для первого условия равновесия, по одному уравнению для каждого компонента чистой силы, действующей на предплечье.
Рисунок 12.12 Диаграмма свободного тела для предплечья: точка вращения расположена в точке E (локоть).Обратите внимание, что в нашей системе отсчета вклад во второе условие равновесия (для крутящих моментов) поступает только от y -компонентов сил, поскольку все x -компоненты сил параллельны плечам рычага, поэтому что для любого из них мы имеем [латекс]\текст{sin}\,\theta =0[/латекс] на рисунке.\circ[/latex] на рисунке. Также обратите внимание, что крутящий момент силы в локте равен нулю, потому что эта сила приложена к оси вращения. Таким образом, вклад в чистый крутящий момент поступает только от крутящих моментов [латекс]{T}_{y}[/латекс] и [латекс]{w}_{y}.[/латекс]
Решение
Из диаграммы свободного тела видно, что x -компонента чистой силы удовлетворяет уравнению
[латекс]+{F}_{x}+{T}_{x}-{w}_{x}=0[/латекс]
и y -компонент чистой силы удовлетворяет
[латекс]+{F}_{y}+{T}_{y}-{w}_{y}=0.[/латекс]
Рисунок и Рисунок — два уравнения первого условия равновесия (для сил). Далее из диаграммы свободного тела читаем, что чистый крутящий момент вдоль оси вращения равен
.[латекс]+{r}_{T}{T}_{y}-{r}_{w}{w}_{y}=0.[/latex]
На рисунке второе условие равновесия (для крутящих моментов) для предплечья. Диаграмма свободного тела показывает, что плечи рычага равны [латекс]{r}_{T}=1,5\,\text{in}\text{.}[/latex] и [латекс]{r}_{w} =13.0\,\text{in}\text{.}[/latex] На данный момент нам не нужно преобразовывать дюймы в единицы СИ, потому что до тех пор, пока эти единицы непротиворечивы на рисунке, они компенсируются.\circ=w\sqrt{3}\,\text{/}\,2.\hfill \end{массив}[/latex]
Подставляем эти величины в рисунок, рисунок и рисунок, чтобы получить соответственно
[латекс]\begin{array}{ccc}\hfill F\,\text{/}\,2+T\,\text{/}\,2-w\,\text{/}\,2& = \hfill & 0\hfill \\ \\ \hfill F\sqrt{3}\,\text{/}\,2+T\sqrt{3}\,\text{/}\,2-w\sqrt{ 3}\,\text{/}\,2& =\hfill & 0\hfill \\ \\ \hfill {r}_{T}T\sqrt{3}\,\text{/}\,2-{ r}_{w}w\sqrt{3}\,\text{/}\,2& =\hfill & 0.\hfill \end{массив}[/latex]
Когда мы упрощаем эти уравнения, мы видим, что у нас остается только два независимых уравнения для двух неизвестных величин силы, F и T , потому что рисунок для x -компонента эквивалентен рисунку для y -компонент.Таким образом, мы получаем первое условие равновесия сил
[латекс]F+T-w=0[/латекс]
и второе условие равновесия моментов
[латекс]{r}_{T}T-{r}_{w}w=0.[/латекс]
Величина напряжения в мышце получается путем решения Рис.:
[латекс]T=\frac{{r}_{w}}{{r}_{T}}\,w=\frac{13.0}{1.5}\,\text{(50 фунтов)}=433 \,\frac{1}{3}\text{lb}\simeq 433.3\,\text{lb.}[/latex]
Сила в локте получается путем решения Рис.:
[латекс]F=w-T=50.0\,\text{lb}-433,3\,\text{lb}=-383,3\,\text{lb.}[/latex]
Знак минус в уравнении говорит нам о том, что фактическая сила в локте антипараллельна рабочему направлению, выбранному для построения диаграммы свободного тела. В окончательном ответе мы переводим силы в единицы силы СИ. Ответ
[латекс]\begin{array}{c}F=383,3\,\text{lb}=383,3(4,448\,\text{N})=1705\,\text{N вниз}\\ T=433,3\ ,\text{lb}=433,3(4,448\,\text{N})=1927\,\text{N вверх.}\end{массив}[/latex]
Значение
Здесь стоит отметить два важных момента.Первый касается преобразования в единицы СИ, которое можно выполнить в самом конце решения, если мы сохраняем согласованность в единицах. Второй важный вопрос касается шарнирных соединений, таких как локтевой. При начальном анализе проблемы всегда следует исходить из того, что шарнирные соединения прилагают силу в произвольном направлении , а затем вы должны решать все компоненты шарнирной силы независимо друг от друга. В этом примере усилие локтя оказывается вертикальным, потому что в задаче предполагается, что напряжение бицепса также является вертикальным.Однако такое упрощение не является общим правилом.
Решение
Предположим, мы принимаем систему отсчета с направлением оси y вдоль 50-фунтового веса и точкой вращения, расположенной в локте. В этой системе отсчета все три силы имеют только y -компонент, поэтому у нас есть только одно уравнение для первого условия равновесия (для сил). Мы рисуем диаграмму свободного тела для предплечья, как показано на рисунке, с указанием оси вращения, действующих сил и их плеч рычагов по отношению к оси вращения, а также углов [латекс] {\ тета } _ {T} [/латекс] и [latex]{\theta}_{w}[/latex], что силы [latex]{\mathbf{\overset{\to}}{T}}}_{\text{M}}[/latex] и [латекс]\mathbf{\overset{\to }{w}}[/латекс] (соответственно) делают своими рычагами.\circ)=\text{−}{r}_{w}w\,\text{sin}\,\beta = \text{−}{r}_{w}w\sqrt{3}\,\text{/}\,2.\end{массив}[/латекс]
Рисунок 12.13 Диаграмма свободного тела для предплечья для эквивалентного решения. Ось расположена в точке Е (локоть).Второе условие равновесия, [латекс]{\тау}_{Т}+{\тау}_{ш}=0,[/латекс] теперь может быть записано как
[латекс]{r}_{T}T\sqrt{3}\,\text{/}\,2-{r}_{w}w\sqrt{3}\,\text{/}\, 2=0.[/латекс]
Из диаграммы свободного тела первое условие равновесия (для сил) равно
[латекс]\текст{−}F+T-w=0.[/латекс]
Рисунок идентичен рисунку и дает результат [латекс]T=433.3\,\text{lb}.[/latex] На рисунке показано число
.[латекс]F=T-w=433,3\,\text{lb}-50,0\,\text{lb}=383,3\,\text{lb.}[/latex]
Мы видим, что эти ответы идентичны нашим предыдущим ответам, но второй выбор системы отсчета приводит к эквивалентному решению, которое проще и быстрее, поскольку не требует разложения сил на их прямоугольные составляющие.
Проверьте свое понимание
Повторите рисунок, предполагая, что предплечье является объектом одинаковой плотности, который весит 8.\circ.[/latex] Найти силы реакции пола и стены на лестницу и коэффициент трения покоя [латекс]{\mu }_{\text{s}}[/латекс] на границе раздела лестница с полом, препятствующим скольжению лестницы.
Рис. 12.14 Лестница длиной 5,0 м упирается в стену без трения.Стратегия
Мы можем выделить четыре силы, действующие на лестницу. Первая сила – это нормальная сила реакции Н от пола в вертикальном направлении вверх.Вторая сила — сила трения покоя [латекс]f={\mu}_{\text{s}}N[/латекс], направленная горизонтально по полу к стене, — эта сила препятствует скольжению лестницы. Эти две силы действуют на лестницу в точке ее контакта с полом. Третьей силой является вес w лестницы, прикрепленной к ее ЦМ, расположенному посередине между ее концами. Четвертая сила – это нормальная сила реакции F от стены в горизонтальном направлении от стены, приложенная в точке контакта со стеной.Других сил нет, потому что стена скользкая, а значит, трения между стеной и лестницей нет. На основе этого анализа мы принимаем систему отсчета с осью y в вертикальном направлении (параллельно стене) и осью х в горизонтальном направлении (параллельно полу). В этой системе отсчета каждая сила имеет либо горизонтальную, либо вертикальную составляющую, но не обе, что упрощает решение. Выбираем точку опоры в точке контакта с полом.На диаграмме свободного тела для лестницы мы указываем точку опоры, все четыре силы и их плечи рычага, а также углы между плечами рычага и силами, как показано на рисунке. При нашем выборе положения оси вращения нет крутящего момента ни от нормальной силы реакции N , ни от трения покоя f , поскольку они оба действуют на точку вращения.
Рисунок 12.15 Схема свободного тела для лестницы, упирающейся в стену без трения.Решение
Из диаграммы свободного тела результирующая сила в направлении x равна
[латекс]+f-F=0[/латекс]
чистая сила в y -направлении равна
[латекс]+N-w=0[/латекс]
, а чистый крутящий момент вдоль оси вращения в точке поворота равен
.\circ-\beta )[/latex] для крутящего момента, вызванного весом.\circ& =\hfill & 150.7\,\text{N}\hfill \end{массив}[/latex]Мы получаем нормальную силу реакции с полом, решая рисунок: [латекс]N=w=400.0\,\text{N}.[/latex] Величина трения получается, решая рисунок: [латекс]f=F =150,7\,\text{N}.[/latex] Коэффициент трения покоя равен [латекс]{\mu } _{\text{s}}=f\,\text{/}\,N=150,7\ ,\текст{/}\,400.0=0,377.[/латекс]
Чистая сила, действующая на лестницу в точке контакта с полом, представляет собой векторную сумму нормальной реакции пола и сил трения покоя:
[латекс] {\ mathbf {\ overset {\ to} {F}}} _ {\ text {floor}} = \ mathbf {\ overset {\ to} {f}} + \ mathbf {\ overset {\ to }{N}}=\text{(150.\circ\,\text{над полом.}[/latex]
Мы должны подчеркнуть здесь два общих наблюдения практического применения. Во-первых, обратите внимание, что когда мы выбираем точку разворота, мы не ожидаем, что система действительно развернется вокруг выбранной точки. Лестница в этом примере вообще не вращается, а твердо стоит на полу; тем не менее, его точка соприкосновения с полом является хорошим выбором для поворота. Во-вторых, обратите внимание, когда мы используем рисунок для вычисления отдельных крутящих моментов, нам не нужно разлагать силы на их нормальные и параллельные составляющие по отношению к направлению плеча рычага, и нам не нужно учитывать значение крутящего момента. .Пока угол на рисунке правильно идентифицирован — с помощью диаграммы свободного тела — как угол, измеренный против часовой стрелки от направления плеча рычага до направления вектора силы, рисунок дает как величину, так и смысл крутящий момент. Это связано с тем, что крутящий момент представляет собой векторное произведение вектора рычага-плеча, скрещенного с вектором силы, а рисунок выражает прямоугольную составляющую этого векторного произведения вдоль оси вращения.
Значение
Этот результат не зависит от длины лестницы, поскольку L сокращается во втором условии равновесия, рис.\circ,[/latex] наши результаты верны. Но лестница будет скользить, если чистый крутящий момент станет отрицательным на рисунке. Это происходит для некоторых углов, когда коэффициент статического трения недостаточно велик, чтобы предотвратить скольжение лестницы.
Проверьте свое понимание
Для ситуации, описанной на рисунке, определить значения коэффициента [латекс]{\mu }_{\text{s}}[/латекс] трения покоя, при которых лестница начинает проскальзывать, учитывая, что [латекс]\бета [/latex] — это угол, который лестница образует с полом.
Показать решение[латекс]{\ mu }_{s} \lt 0,5\,\text{кроватка}\,\бета[/латекс]
Пример
Силы на дверных петлях
Качающаяся дверь весом [латекс]w=400,0\,\text{N}[/латекс] поддерживается петлями A и B , так что дверь может поворачиваться вокруг вертикальной оси, проходящей через петли Рис. Дверь имеет ширину [латекс]b=1,00\,\text{м},[/латекс], а дверная плита имеет однородную массовую плотность. Петли располагаются симметрично на краю двери таким образом, чтобы вес двери равномерно распределялся между ними.Петли находятся на расстоянии [латекс]а=2,00\,\текст{м}.[/латекс] Найдите силы, действующие на петли, когда дверь полуоткрыта.
Рисунок 12.16 Распашная вертикальная дверь 400-N поддерживается двумя петлями, закрепленными в точках A и B.Стратегия
Силы, действующие на петли двери, можно найти, просто поменяв местами направления сил, воздействующих на дверь со стороны петель. Значит, наша задача найти силы от петель на двери. На дверную плиту действуют три силы: неизвестная сила [латекс]\mathbf{\overset{\to }{A}}[/латекс] от петли [латекс]А,[/латекс] неизвестная сила [латекс]\mathbf {\overset{\to} {B}}[/latex] из шарнира [латекс]B,[/latex] и известного веса [латекс]\mathbf{\overset{\to }{w}}[/latex] крепится в центре масс дверной плиты.КМ располагается в геометрическом центре двери, поскольку плита имеет однородную плотность массы. Мы принимаем прямоугольную систему отсчета с осью y вдоль направления силы тяжести и осью х в плоскости плиты, как показано на панели (a) рисунка, и разделяем все силы на их прямоугольные компоненты. Таким образом, у нас есть четыре неизвестных составляющих силы: две составляющие силы [латекс]\mathbf{\overset{\to }{A}}[/latex] [латекс]({A}_{x}[/latex] и [латекс] {A}_{y}),[/latex] и две составляющие силы [латекс]\mathbf{\overset{\to }{B}}[/latex] [латекс]({B}_ {x}[/латекс] и [латекс]{B}_{y}).[/latex] На диаграмме свободного тела мы представляем две силы на шарнирах их векторными компонентами, предполагаемая ориентация которых произвольна. Потому что есть четыре неизвестных [латекс]({А}_{х},[/латекс] [латекс]{В}_{х},[/латекс] [латекс]{А}_{у},[/латекс ] и [latex]{B}_{y}),[/latex] мы должны составить четыре независимых уравнения. Одно уравнение является условием равновесия сил в направлении x . Второе уравнение представляет собой условие равновесия сил в направлении y .Третье уравнение представляет собой условие равновесия крутящих моментов при вращении вокруг шарнира. Поскольку вес равномерно распределен между шарнирами, у нас есть четвертое уравнение: [латекс]{А}_{у}={В}_{у}.[/латекс] Чтобы установить условия равновесия, мы рисуем свободную -схему корпуса и выберите точку поворота на верхнем шарнире, как показано на панели (b) рисунка. Наконец, решаем уравнения для неизвестных составляющих сил и находим силы.
Рисунок 12.17 (a) Геометрия и (b) диаграмма свободного тела для двери.Решение
Из диаграммы свободного тела двери получаем первое условие равновесия сил:
[латекс]\begin{array}{}\\ \text{in}\,x\text{-direction:}\hfill & \,-{A}_{x}+{B}_{x}= 0\enspace\Стрелка вправо \enspace{A}_{x}={B}_{x}\hfill \\ \text{in}\,y\text{-направление:}\hfill & +{A}_{ y}+{B}_{y}-w=0\enspace\Rightarrow \enspace{A}_{y}={B}_{y}=\frac{w}{2}=\frac{400.0\ ,\text{N}}{2}=200.0\,\text{N.}\hfill \end{массив}[/latex]
Выбираем шарнир в точке P (верхний шарнир, согласно диаграмме свободного тела) и записываем второе условие равновесия моментов при вращении вокруг точки P :
[латекс]\текст{поворот на}\,P\текст{:}\,{\tau}_{w}+{\tau}_{Bx}+{\tau}_{By}=0.\circ=0.\hfill \end{массив}[/latex]
При вычислении [латекс]\текст{sin}\,\бета ,[/латекс] мы используем геометрию треугольника, показанную в части (а) рисунка. Теперь мы подставляем эти крутящие моменты на рисунок и вычисляем [latex]{B}_{x}:[/latex]
[латекс]\текст{поворот на}\,P\текст{:}\,\текст{−}w\,\frac{b}{2}+a{B}_{x}=0\enspace\ Стрелка вправо \enspace{B}_{x}=w\,\frac{b}{2a}=(400,0\,\text{N})\,\frac{1}{2\cdot 2}=100,0\, \text{Н.}[/латекс]
Следовательно, величины горизонтальных составляющих сил равны [латекс]{A}_{x}={B}_{x}=100.0\,\text{N}.[/latex] Силы на двери равны
[латекс] \ begin {array} {} \\ \ text {на верхней петле:} \, {\ mathbf {\ overset {\ to} {F}}} _ {A \, \ text {на двери} }=-100,0\,\text{N}\mathbf{\hat{i}}+200,0\,\text{N}\mathbf{\hat{j}}\hfill \\ \text{на нижнем шарнире: }{\mathbf{\overset{\to}}{F}}}_{B\,\text{на двери}}=\text{+}100,0\,\text{N}\mathbf{\hat{i} }+200.0\,\text{N}\mathbf{\hat{j}}.\hfill \end{массив}[/latex]
Силы на шарнирах находятся из третьего закона Ньютона как
[латекс] \ begin {массив} {cc} \ text {на верхней петле:} \, {\ mathbf {\ overset {\ to} {F}}} _ {\ text {дверь на} \, A} =100.0\,\text{N}\mathbf{\шляпа{i}}-200,0\,\text{N}\mathbf{\шляпа{j}}\hfill \\ \text{на нижнем шарнире:}\, {\mathbf{\overset{\to}}{F}}}_{\text{дверь включена}\,B}=-100,0\,\text{N}\mathbf{\шляпа{i}}-200,0\, \text{N}\mathbf{\hat{j}}.\hfill \end{массив}[/latex]
Значение
Заметим, что если бы задача была сформулирована без предположения о том, что вес равномерно распределен между двумя шарнирами, мы не смогли бы решить ее, потому что количество неизвестных было бы больше, чем количество уравнений, выражающих условия равновесия.
Проверьте свое понимание
Решите задачу на рисунке, приняв положение оси в центре масс.
Показать решение[латекс] {\ mathbf {\ overset {\ to} {F}}} _ {\ text {дверь на} \, A} = 100,0 \, \ text {N} \ mathbf {\ hat {i} } -200,0 \, \ text {N} \ mathbf {\ hat {j}} \, \ text {;} \, {\ mathbf {\ overset {\ to} {F}}} _ {\ text {дверь на }\,B}=-100,0\,\text{N}\mathbf{\шляпа{i}}-200,0\,\text{N}\mathbf{\шляпа{j}}[/latex]
Проверьте свое понимание
Человек весом 50 кг стоит 1.На расстоянии 5 м от одного конца однородных лесов длиной 6,0 м и массой 70,0 кг. Найдите натяжение двух вертикальных канатов, поддерживающих леса.
Показать раствор711,0 Н; 466.0 Н
Проверьте свое понимание
Знак 400.0-N висит на конце единой стойки. Стойка имеет длину 4,0 м и весит 600,0 Н. Стойка поддерживается шарниром в стене и тросом, другой конец которого привязан к стене в точке на 3,0 м выше левого конца стойки.\circ[/latex] над горизонталью
Резюме
- Множество инженерных задач можно решить, применяя условия равновесия для твердых тел.
- В приложениях определите все силы, действующие на твердое тело, и отметьте их плечи рычага при вращении вокруг выбранной оси вращения. Постройте диаграмму свободного тела для тела. Чистые внешние силы и крутящие моменты можно четко определить по правильно построенной диаграмме свободного тела. Таким образом, вы можете установить первое условие равновесия для сил и второе условие равновесия для крутящих моментов.
- При создании условий равновесия мы вольны принять любую инерциальную систему отсчета и любое положение точки вращения. Все варианты ведут к одному ответу. Однако некоторые варианты могут чрезмерно усложнить процесс поиска решения. Мы приходим к одному и тому же ответу независимо от того, какой выбор мы делаем. Единственный способ овладеть этим навыком — практиковаться.
Концептуальные вопросы
Можно ли прислонить лестницу к шероховатой стене, если пол не имеет трения?
Покажите, как можно использовать пружинные весы и простую точку опоры для взвешивания объекта, вес которого превышает максимальное значение на весах.
Художник поднимается по лестнице. Вероятность того, что лестница соскользнет, выше, когда маляр находится внизу или вверху?
Проблемы
Однородная доска лежит на ровной поверхности, как показано ниже. Доска имеет массу 30 кг и длину 6,0 м. Какую массу можно поместить на его правый конец, прежде чем он опрокинется? ( Подсказка: Когда доска вот-вот опрокинется, она соприкасается с поверхностью только вдоль края, который становится мгновенной осью вращения.)
Равномерные качели, показанные ниже, уравновешены на точке опоры, расположенной 3.0 м от левого края. Меньший мальчик справа имеет массу 40 кг, а больший мальчик слева имеет массу 80 кг. Какова масса доски?
Show Solution40 кг
Чтобы вытащить машину из грязи, мужчина привязывает один конец веревки к переднему бамперу, а другой конец к дереву на расстоянии 15 м, как показано ниже. Затем он тянет за центр веревки с силой 400 Н, в результате чего ее центр смещается на 0,30 м, как показано на рисунке. С какой силой веревка действует на автомобиль?
Униформа 40.Леса массой 0 кг и длиной 6,0 м поддерживаются двумя легкими тросами, как показано ниже. Маляр массой 80,0 кг стоит в 1,0 м от левого конца подмостей, а его малярное оборудование — в 1,5 м от правого конца. Если натяжение левого троса вдвое больше, чем натяжение правого троса, найти натяжение тросов и массу оборудования.
Показать Ответправый трос, 444,3 Н; левый трос, 888,5 Н; масса снаряжения 156,8 Н; 16,0 кг
Когда конструкция, показанная ниже, поддерживается в точке P , она находится в равновесии.Найдите величину силы F и силу, приложенную к точке P . Вес конструкции незначителен.
Чтобы подняться на крышу, человек (массой 70,0 кг) прислоняет алюминиевую лестницу длиной 6,00 м (массой 10,0 кг) к дому на бетонной площадке с основанием лестницы на расстоянии 2,00 м от дома. Лестница упирается в пластиковый водосточный желоб, который можно считать без трения. Центр масс лестницы находится на расстоянии 2,00 м от низа. Человек стоит 3.00 м от дна. Найдите нормальную реакцию и силы трения на лестнице у ее основания.
Показать решение784 Н, 376 Н
Однородная горизонтальная стойка массой 400,0 Н. Один конец стойки прикреплен к шарнирной опоре на стене, а другой конец стойки прикреплен к знаку массой 200,0 Н. Стойка также поддерживается прикрепленным тросом между концом стойки и стеной. Считая, что весь вес знака прикреплен к самому концу стойки, найти натяжение троса и усилие в шарнире стойки.\circ\text{?}[/latex] (b) Какова величина силы, действующей на локтевой сустав при том же угле? (c) Как эти силы зависят от угла [латекс]\тета ?[/латекс]
Показать решениеа. 539 Н; б. 461 Н; в. не зависят от угла
Единая стрела, показанная ниже, весит 3000 Н. Она поддерживается горизонтальной растяжкой и шарнирной опорой в точке A . Каковы силы на стреле из-за троса и из-за опоры на A ? Действует ли сила A вдоль стрелы?
Единая стрела, показанная ниже, весит 700 Н, а объект, свисающий с ее правого конца, весит 400 Н.\circ[/latex] над горизонталью; №
Ниже показана стрела длиной 12,0 м, AB , крана, поднимающего груз массой 3000 кг. Центр масс стрелы находится в ее геометрическом центре, а масса стрелы 1000 кг. Для показанного положения рассчитайте натяжение троса T и усилие на оси A .
Показанный ниже однородный люк имеет размеры 1,0 м на 1,5 м и весит 300 Н. Он поддерживается одной петлей (H) и легкой веревкой, привязанной между серединой двери и полом.\circ[/латекс]
Мужчина массой 90 кг идет на козлах, как показано ниже. Козлы имеют длину 2,0 м, высоту 1,0 м и массу 25,0 кг. Рассчитайте нормальную силу реакции каждой ноги в точке контакта с полом, когда человек находится на расстоянии 0,5 м от дальнего конца козла. ( Подсказка: На каждом конце сначала найдите общую силу реакции. Эта сила реакции представляет собой векторную сумму двух сил реакции, каждая из которых действует вдоль одной опоры. Нормальная сила реакции в точке контакта с полом является нормальной (при относительно пола) составляющая этой силы.)
.