Теоретическая механика. 20 лекций. Ч. 1. Статика. Кинематика
Теоретическая механика. 20 лекций. Ч. 1. Статика. Кинематика
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ. ПРЕДМЕТ И ОСНОВНЫЕ ПОНЯТИЯ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ СТАТИКА. ЛЕКЦИЯ 1. ЗАДАЧИ СТАТИКИ, АКСИОМЫ СТАТИКИ. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ Момент силы относительно точки Алгебраический момент силы Основные типы связей и их реакции Упражнения ЛЕКЦИЯ 2. СХОДЯЩИЕСЯ СИЛЫ И ПАРЫ СИЛ Сходящиеся силы. Приведение сходящихся сил к простейшему виду Вычисление и построение равнодействующей Условия равновесия сходящихся сил Теорема о трех силах Теорема Вариньона Пара сил и ее момент Приведение системы пар сил к простейшему виду или сложение пар сил Упражнения ЛЕКЦИЯ 3. ПРЕОБРАЗОВАНИЕ И РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ Аналитический способ вычисления момента Геометрический способ вычисления момента Преобразование пространственной произвольной системы сил Приведение пространственной произвольной системы сил к данному центру. 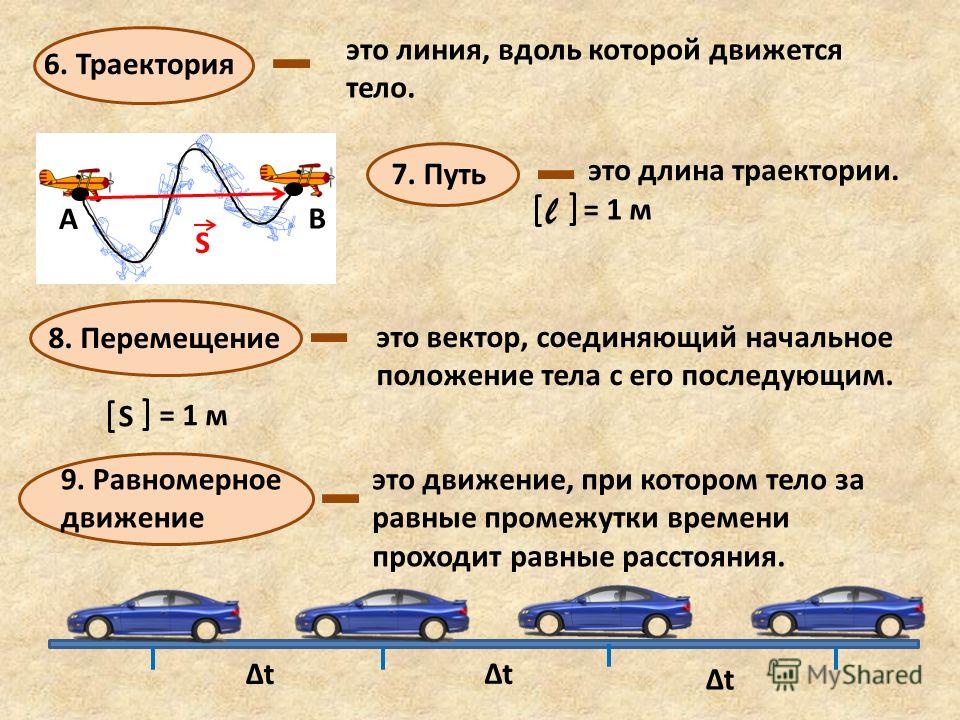 Главный вектор и главный момент. Основная теорема статики Главный вектор и главный момент. Основная теорема статикиВычисление и построение главного вектора и главного момента Перемена центра приведения ЛЕКЦИЯ 4. ПРЕОБРАЗОВАНИЕ И РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ (продолжение). ЧАСТНЫЕ СЛУЧАИ СИСТЕМЫ СИЛ Случаи приведения к простейшему виду Условия (уравнения) равновесия пространственной произвольной системы сил Плоская система сил Система параллельных сил Равновесие системы тел Вопросы для самопроверки ЛЕКЦИЯ 5. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ И ЦЕНТР ТЯЖЕСТИ Центр параллельных сил Распределенные силы Центр тяжести Интегральные формулы для координат центра тяжести Метод разбиения Вопросы для самопроверки ЛЕКЦИЯ 6. ТРЕНИЕ ТВЕРДЫХ ТЕЛ Трение покоя и трение скольжения Трение качения Решение задач статики при учете сил трения Заклинивание Упражнения КИНЕМАТИКА ЛЕКЦИЯ 7. КИНЕМАТИКА ТОЧКИ Способы задания движения точки Определение траектории, скорости и ускорения точки при векторном способе задания движения Определение скорости и ускорения точки при естественном способе задания движения Естественные координатные оси и их орты Определение скорости Определение ускорения Вопросы для самопроверки ЛЕКЦИЯ 8. 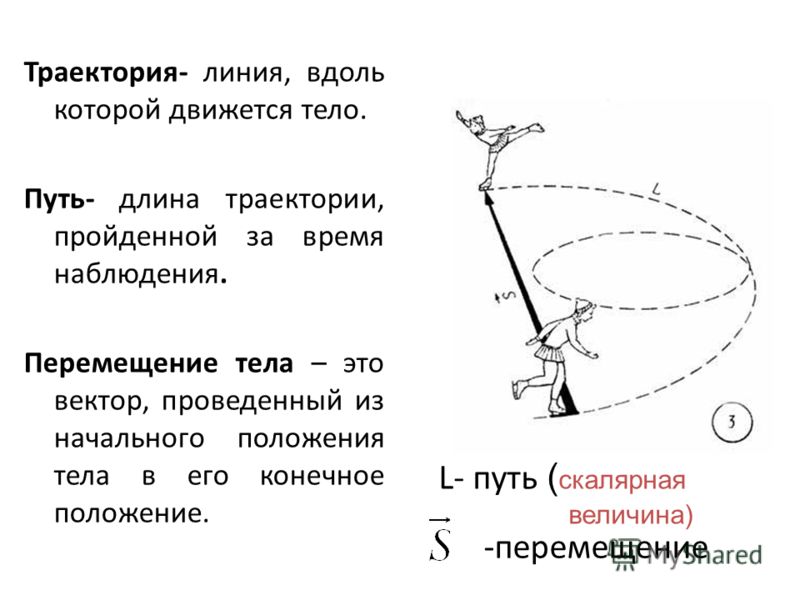 ПРОСТЕЙШИЕ ДРИЖЕНИЯ ТВЕРДОГО ТЕЛА ПРОСТЕЙШИЕ ДРИЖЕНИЯ ТВЕРДОГО ТЕЛАПоступательное движение Вращательное движение Уравнение вращательного движения. Угловая скорость и угловое ускорение тела Траектории, скорости и ускорения точек тела Векторы угловой скорости и углового ускорения тела Вопросы для самопроверки ЛЕКЦИЯ 9. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА Уравнения движения Угловая скорость и угловое ускорение тела при плоскопараллельном движении Определение скоростей точек тела. Метод полюса Мгновенный центр скоростей Определение скоростей точек плоской фигуры через мгновенный центр скоростей Различные случаи определения положения мгновенного центра скоростей Определение ускорений точек тела Вопросы для самопроверки ЛЕКЦИЯ 10. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Теорема сложения скоростей Теорема сложения ускорений Причины появления ускорения Кориолиса Вопросы для самопроверки ДОБАВЛЕНИЕ. 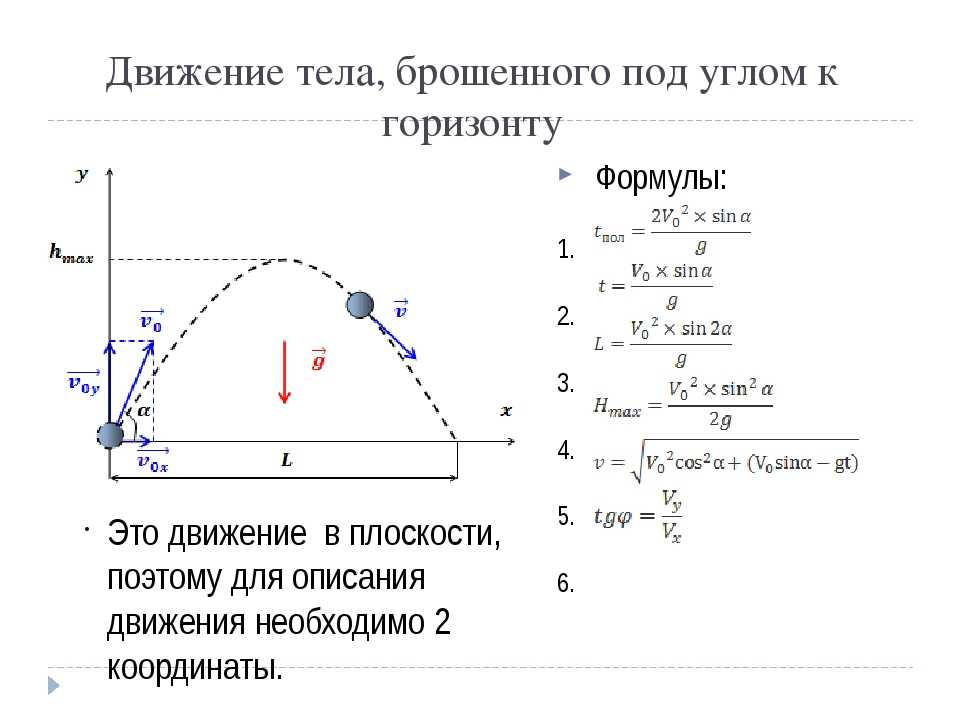 КИНЕМАТИКА ПРОЦЕССА ФУГОВАНИЯ ДРЕВЕСИНЫ КИНЕМАТИКА ПРОЦЕССА ФУГОВАНИЯ ДРЕВЕСИНЫСхема и расчетная модель процесса фугования Геометрические характеристики обработанной поверхности при одном ноже в ножевой головке Геометрические характеристики поверхности в случае многоножевой головки РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА |

что это такое в физике, определение, как обозначается, примеры решения задач
Понятие траектории
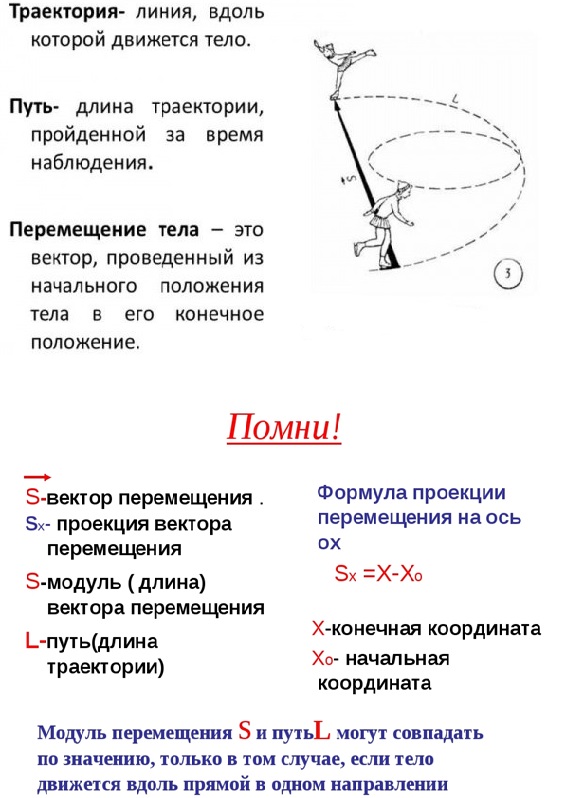
Определение 1Траектория физической точки — линия в пространстве, описывающая движение тела; представляет собой некоторое множество точек, через которые проходили, проходят или будут проходить материальные точки в процессе перемещения в пространстве в соответствие с выбранной системой отчета.
Примечание 1Термин «траектория» будет иметь свой физический смысл даже в тех случаях, когда никакого движения по ней не происходит.
Траектория в случае наличия движущегося по ней объекта, изображаемая в заданной ранее системе пространственных координат, ничего не говорит относительно причин движения этого объекта, пока не будет проведен анализ конфигурации поля и воздействующих на него в данной системе координат сил.
Форма определенной траектории напрямую связана с конкретной системой отчета, в которой происходит описание движения.
Можно говорить о наблюдении некой траектории при абсолютной неподвижности предмета\объекта, но в таком случае будет происходить движение самой системы отсчета.
ПримерПримером такой системы может быть звездное небо. Данная система инерциальная и неподвижна. Однако при длительном рассмотрении звезды в звездном небе будут двигаться по траектории круга.
Бывают и случаи, когда объект движется, но его траектория в проекции на плоскость наблюдения сама по себе представляется неподвижной точкой.
Определение 2Перемещение точки за некоторый временной промежуток — направленный отрезок прямой, его начало полностью совпадает с начальным положением точки, а ее конец совпадает с конечным положением точки.
Перемещение точечного объекта может определяться только начальной и конечной координатами объекта, оно не зависит от того, каким образом передвигалось тело в течение рассматриваемого временного промежутка.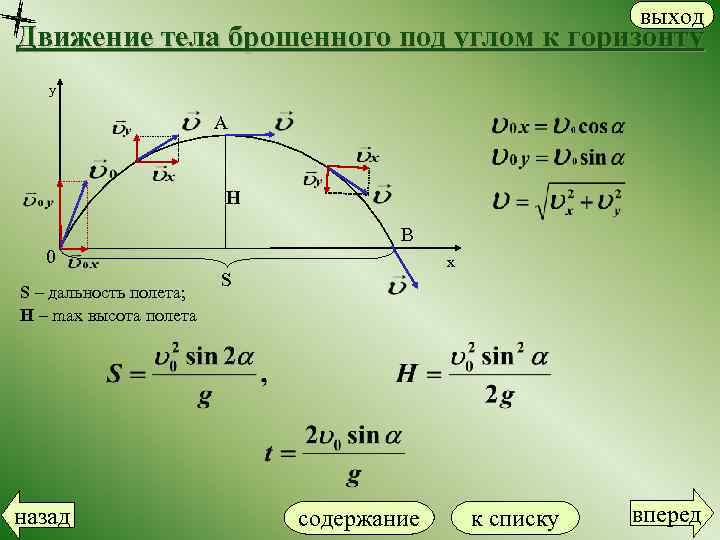
Путь — определенная длина траектории, пройденная объектом; расстояние, которое проходит точечное тело за определенный временной промежуток.
В случае, если объект в процессе своего движения не изменяет своего направления движения, то путь, который пройден данным телом, будет равен модулю перемещения данного тела. Если же тело, наоборот, изменяло свое направление в течение определенного временного промежутка, то путь будет больше модуля перемещения тела, а также модуля изменения координаты данного тела.
Путь — величина всегда неотрицательная. Он может быть равен нулю только тогда, когда тело находилось в покое в течение определенного временного промежутка.
Рассмотрим виды траекторий:
- Если объект совершает движение вдоль прямой, то такое движение называется прямолинейным. Траектория в таком случае является прямым отрезком.
- Если траектория представляет собой кривую линию, то такое движение можно назвать криволинейным.
Чтобы описание положение определенного объекта в пространстве нужно:
- Выбрать тело отсчета, а также начало отсчета на нем.
- Связать с телом отсчета координатную ось, которая проходила бы через начало отсчета в определенном направлении, а также указать единицу длины.
Расстояние от начала отсчета до определенного тела, выраженное в выбранных единицах длины, а также взятое с соответствующим знаком, обычно называют координатой данного тела.
Форма определенной траектории напрямую связана с тем, какую систему отсчета выбирает человек. В различных системах отсчета траектории представлены самыми разными линиями — они могут быть как прямыми, так и кривыми.
При движении точки, обладающей постоянным ускорением, можно представить следующее уравнение:r¯(t)=r0¯+v0¯t+a¯t22(1)
В данном уравнении r¯(t) является радиусом-вектором определенной точки в определенный момент времени, v0¯ будет определять начальную скорость передвижения точки, a¯ является показателем ускорения данной точки.
Траектория такого движения будет представлять плоскую кривую, а это значит, что все точки данной кривой расположены на одной плоскости. Положение данной плоскости в пространстве задается векторами ускорения, а также начальной скорости.
Ориентация координатных осей выбирается обычно так, чтобы плоскость движения полностью совпадала с хотя бы одной из координатных плоскостей. В таком случае векторное уравнение (1) возможно свести к двум скалярным уравнениям.
Уравнение траектории движения
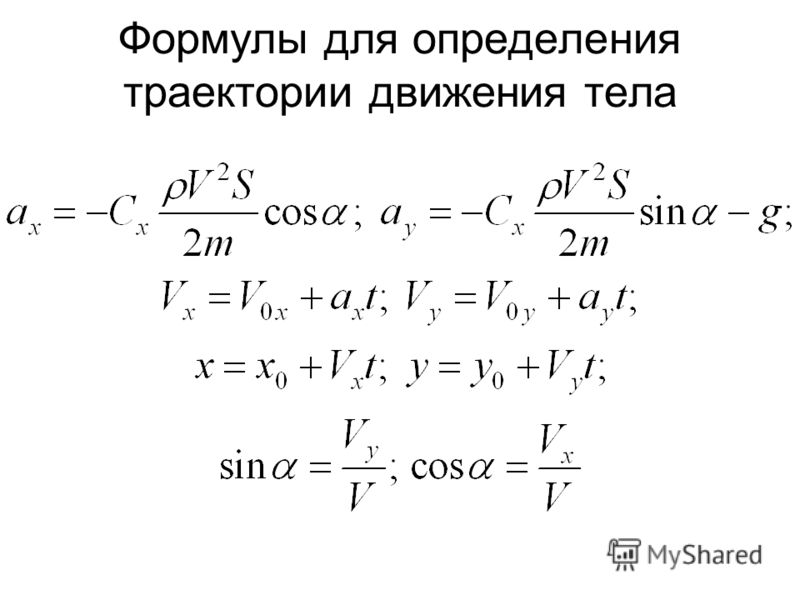
Давайте посмотрим на свободное движение объекта рядом с поверхностью планеты Земля. Начало координат будет находиться в точке выброса тела, а оси координат будут направлены так, как показано на рисунке ниже:
Источник: webmath.ru
В таком случае уравнение движения данного тела (1) в проекции на координатные оси в декартовой координатной системе будет состоять из двух уравнений:
Формула 1Для того чтобы получилось уравнение для траектории движения объекта y=y(x), необходимо исключить из нее время движения тела из уравнений (2) и (3).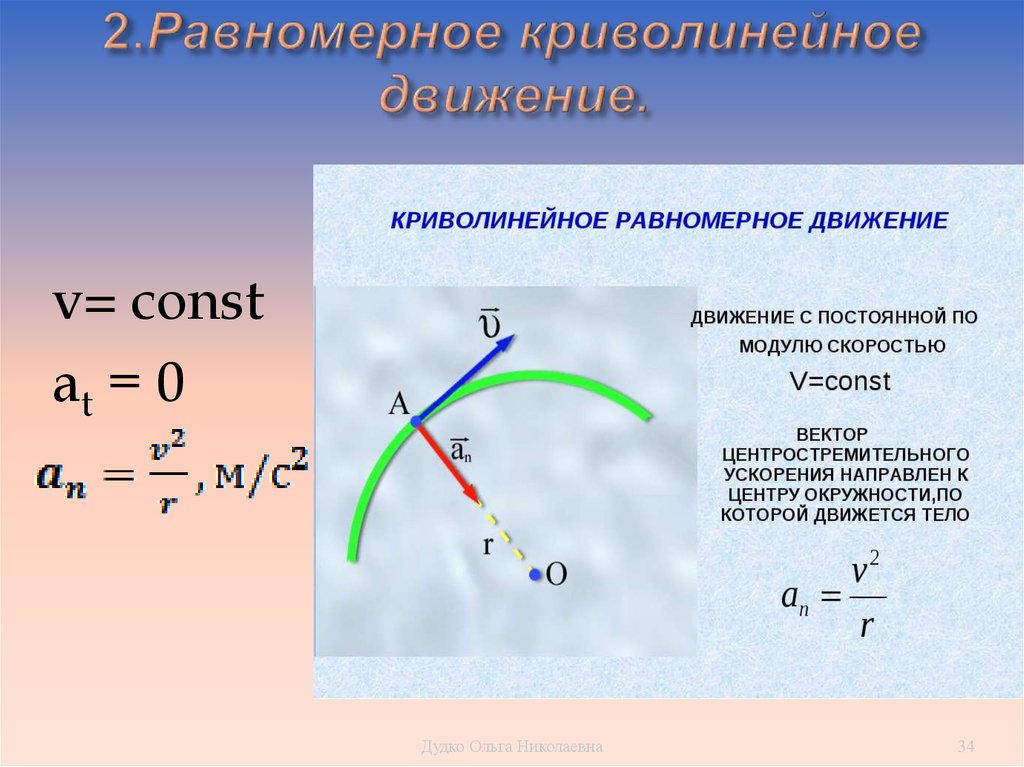 Попробуем выразить из уравнения (2) время и поставить его в уравнение (3), тогда получаем:
Попробуем выразить из уравнения (2) время и поставить его в уравнение (3), тогда получаем:
t=xv0cosα;y=v0xv0cosαsinα-g2(xv0cosα)2→y=xtanα-gx22v02cos2α(4)
Уравнение (4) является уравнением для параболы, проходящей через начало координат. Ветви данной параболы будут направлены вниз, потому что коэффициент x2 меньше нуля.
Вершина данной параболы будет находиться в точке с такими координатами:
Определить координаты вершины траектории возможно при помощи существующих правил исследования функции на экстремум. В таком случае максимум функции y(x) будет определяться, если приравнять к нулю производную dydx от функции по x.
Положение объектов в системе отсчета возможно определить разными способами. В соответствии с данными способами можно описать и движение объекта или точки.
1. Координатная форма описания движения.
Сначала делаем выбор координатной системы. В данной системе положение точки будет характеризоваться тремя координатами (при условии трехмерного пространства).
Этими координатами могут быть x1=x,x2=y,x3=z в условиях декартовой координатной системы.
Координаты x1=ρ,x2=ϕ,x3=z в условиях цилиндрической системы.
В процессе перемещения точки координаты служат функциями времени. То есть описать движение одной точки — значит, указать данные временные функции:
Формула 3x1=x1(t);;x2=x2(t);;x3=x3(t)(6).
2. Описание движения в форме вектора.
В данных условиях положение объекта будет задаваться радиусом-вектором r¯ по отношению к такой точке, которую воспринимают как начальную.
В данном случае вводят определенную точку отсчета. В процессе перемещения объекта вектор r¯ изменяется. Конец данного вектора описывает траекторию. Движение будет задаваться следующим уравнением:
Формула 4r¯=r¯(t)(7).
3. Третий способ описания изменения движения точки — описание при помощи параметров траектории.
Примечание 2Путь является скалярной величиной, равной длине траектории.
Если траектория уже задана, то обычно задачу по описанию движения сводят к определению закона движения вдоль нее. При этом выбирают начальную точку траектории. Любую иную точку будут характеризовать расстоянием s по траектории от начальной точки. Так движение будет описываться уравнением:
При этом выбирают начальную точку траектории. Любую иную точку будут характеризовать расстоянием s по траектории от начальной точки. Так движение будет описываться уравнением:
s=s(t).
Представим, что по окружности с радиусом R равномерно движется точка. Закон движения для данной точки по окружности будет описываться в данном методе как:
s=At, где
- s — путь точки по траектории;
- t — время движения;
- A — коэффициент пропорциональности.
Известными величинами будут окружность, а также точка начала движения. Отсчет положительных показателей s будет совпадать с направлениями перемещения точки по данной траектории.
Примечание 3Знание траектории движения объекта часто намного упрощает процесс описания движения объекта.
Траектория тела в разных системах отсчета
Определение 4Система отсчета — совокупность тела отсчета, связанного с координатной осью, и времени.
Если же координата тела не изменяется в течение некоторого времени в данной системе отсчета, то в таком случае тело покоится, то есть оно неподвижно в данной системе отсчета.
Если же координата объекта в выбранной системе отсчета увеличивается со временем, то такое тело совершает движение в положительном направлении координатной оси. И наоборот, если со временем координата тела в данной системе отсчета уменьшается, то такое тело совершает движение в отрицательном направлении оси координат.
Невозможно сказать, как именно движется тело, если не уточнить, в какой системе отсчета рассматривается данное тело. Другими словами, одно и то же тело в различных системах отсчета может совершать разные движения (в том числе и находиться в состоянии покоя).
Посмотрите на картинку:
Источник: uchitel.pro
Примеры решения задач
ЗадачаЗадана физическая точка, движение которой в плоскости описывается системой выражений:
.
В данном уравнении показатели A и B являются положительными постоянными. Нужно записать уравнение для траектории точки.
Решение задачи:
Рассмотрим систему выражений, которая задается в условиях задачи:
.
Нужно исключить временной показатель из уравнения данной системы.
Выразим время из первого выражения:
t=xA
Подставим правую часть во второе выражение системы (вместо показателя времени).
Получим: y=At(1+Bt)=At+ABt2=AxA+AB(xA)2=x+BAx2
Ответ: y=x+BAx2
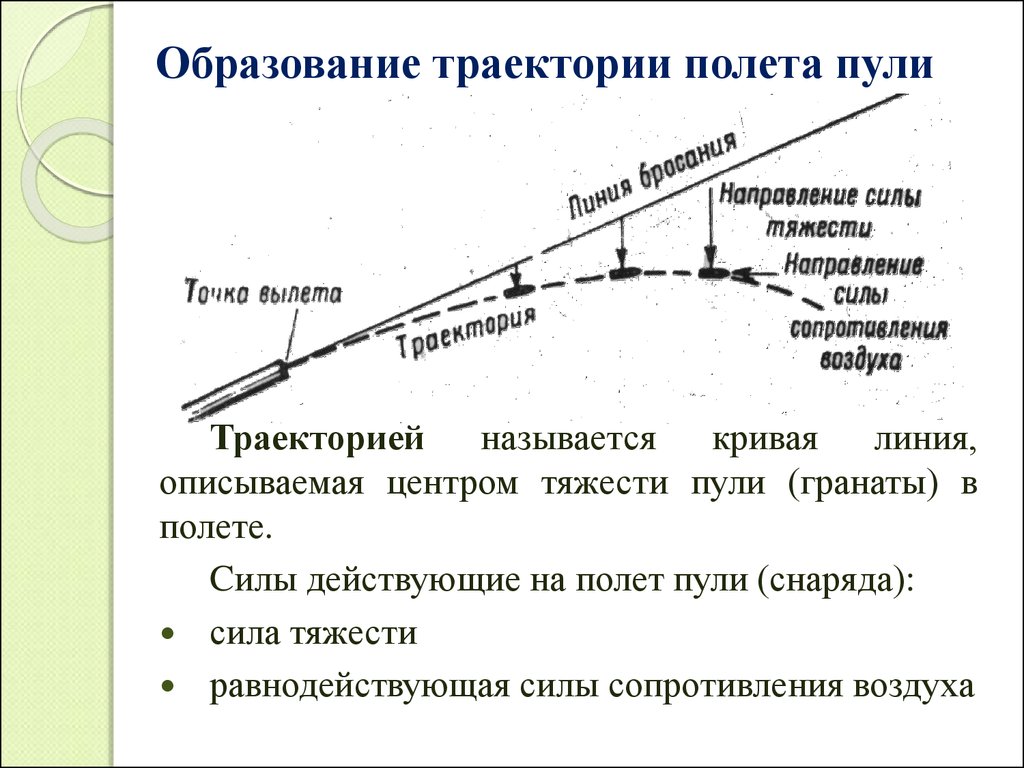
Как рассчитать траекторию пули
Расчет траектории пули служит полезным введением в некоторые ключевые понятия классической физики, но он также может включать более сложные факторы. На самом базовом уровне траектория пули работает точно так же, как и траектория любого другого снаряда. Ключевым моментом является разделение компонентов скорости по осям (x) и (y) и использование постоянного ускорения силы тяжести, чтобы определить, как далеко пуля может пролететь, прежде чем ударится о землю. Однако вы также можете включить сопротивление и другие факторы, если хотите получить более точный ответ. 92}{2m}
Здесь (C) – коэффициент аэродинамического сопротивления пули, (ρ) – плотность воздуха, (A) – площадь пули, (t) – время полета, (m) это масса пули.
Фон: (x) и (y) Компоненты скорости
Главное, что вам нужно понять при расчете траекторий, это то, что скорости, силы или любой другой «вектор» (у которого есть направление, а также сила ) можно разделить на «компоненты». Если что-то движется под углом 45 градусов к горизонтали, подумайте об этом как о движении по горизонтали с определенной скоростью и по вертикали с определенной скоростью. Комбинируя эти две скорости и принимая во внимание их различные направления, вы получаете скорость объекта, включая как скорость, так и их результирующее направление.
Используйте функции cos и sin для разделения сил или скоростей на их компоненты. Если что-то движется со скоростью 10 метров в секунду под углом 30 градусов к горизонтали, x-компонент скорости равен:
v_x=v\cos{\theta}=(10\text{ m/ s})\cos{30}=8,66\text{ м/с}
Где (v) — скорость (т. е. 10 метров в секунду), и вместо (θ) можно поставить любой угол подходит для вашей проблемы.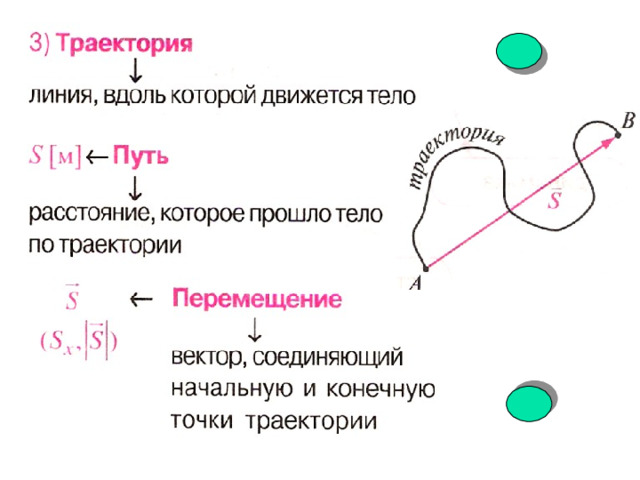 Компонент (y) задается аналогичным выражением:
Компонент (y) задается аналогичным выражением:
v_y=v\sin{\theta}=(10\text{ м/с})\sin{30}=5\text{ м/с}
Эти две составляющие составляют исходную скорость.
Базовые траектории с уравнениями постоянного ускорения
Ключом к решению большинства задач, связанных с траекториями, является то, что снаряд перестает двигаться вперед, когда ударяется об пол. Если пуля выпущена с высоты 1 метр в воздухе, то когда ускорение силы тяжести унесет ее вниз на 1 метр, она не сможет лететь дальше. Это означает, что y-компонента является самой важной вещью, которую следует учитывать. 92
Которые вы преобразуете в:
t=\sqrt{\frac{2h}{g}}
Это время полета пули. Его поступательная скорость определяет пройденное расстояние и определяется как:
x=v_{0x}t
Где скорость – это скорость, с которой он покидает пушку. Это игнорирует эффекты перетаскивания, чтобы упростить математику. Используя уравнение для (t), найденное минуту назад, пройденное расстояние равно:
Используя уравнение для (t), найденное минуту назад, пройденное расстояние равно:
x=v_{0x}\sqrt{\frac{2h}{g}}
стреляет с высоты 1 метр, это дает: 92}{2}
Здесь (С) — коэффициент аэродинамического сопротивления пули (можно узнать для конкретной пули, либо использовать как общую цифру С = 0,295), ρ — плотность воздуха (около 1,2 кг/куб. метр при нормальном давлении и температуре), (A) — площадь поперечного сечения пули (вы можете вычислить это для конкретной пули или просто использовать A = 4,8 × 10 −5 м 2 , значение для a .308 калибра) и (v) — скорость пули. Наконец, вы используете массу пули, чтобы преобразовать эту силу в ускорение для использования в уравнении, которое можно принять равным m = 0,016 кг, если вы не имеете в виду конкретную пулю. 92}{2(0,016\текст{кг})}\\=180,8\текст{м}-\фракция{0,555\текст{кгм}}{0,032\текст{кг}}\\=180,8\текст{м} -17,3\text{ м}\\=163,5\text{ м}
Таким образом, добавление сопротивления меняет оценку примерно на 17 метров.
Калькулятор траектории
Калькулятор траектории для определения дальности, максимальной высоты и времени полета горизонтального снаряда в физике. См. Калькулятор движения снаряда для более детального расчета траектории.
| ВХОДНЫЕ ПАРАМЕТРЫ | ||
| Начальная скорость (V0) | см/см/см/чкм/дюйм/фут/см/ч | |
| Угол запуска (α) | деградировать | |
| Начальная высота (ч 0 ) | сммкминфт | |
| Гравитация* 92 | ||
Примечание. Используйте точку “.” как десятичный разделитель.
Используйте точку “.” как десятичный разделитель.
Примечание: Конечная высота снаряда равна 0.
Примечание*: Вектор силы тяжести отрицателен в направлении вниз.
| РЕЗУЛЬТАТЫ | |||
| Параметр | Символ | Значение | Блок |
| Максимальная высота | 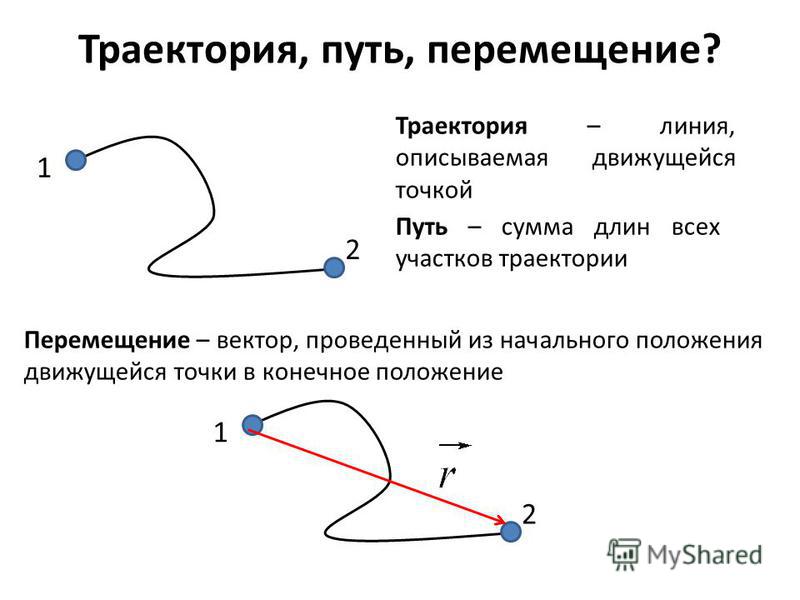 | сммкминфт | |
| Горизонтальное расстояние | л | ||
| Продолжительность полета | т | [с] | |
Движение снаряда: Движение снаряда — это форма движения, происходящая в двух измерениях.