Векторы ускорения и скорости. Ускорение и сила. Направления тангенциального и нормального ускорений
Как известно, любая физическая величина относится к одному из двух типов, она является либо скалярной, либо векторной. В данной статье рассмотрим такие кинематические характеристики как скорость и ускорение, а также покажем, куда направлены векторы ускорения и скорости.
Что такое скорость и ускорение?
Обе величины, названные в этом пункте, являются важными характеристиками любого вида движения, будь то перемещение тела по прямой линии или по криволинейной траектории.
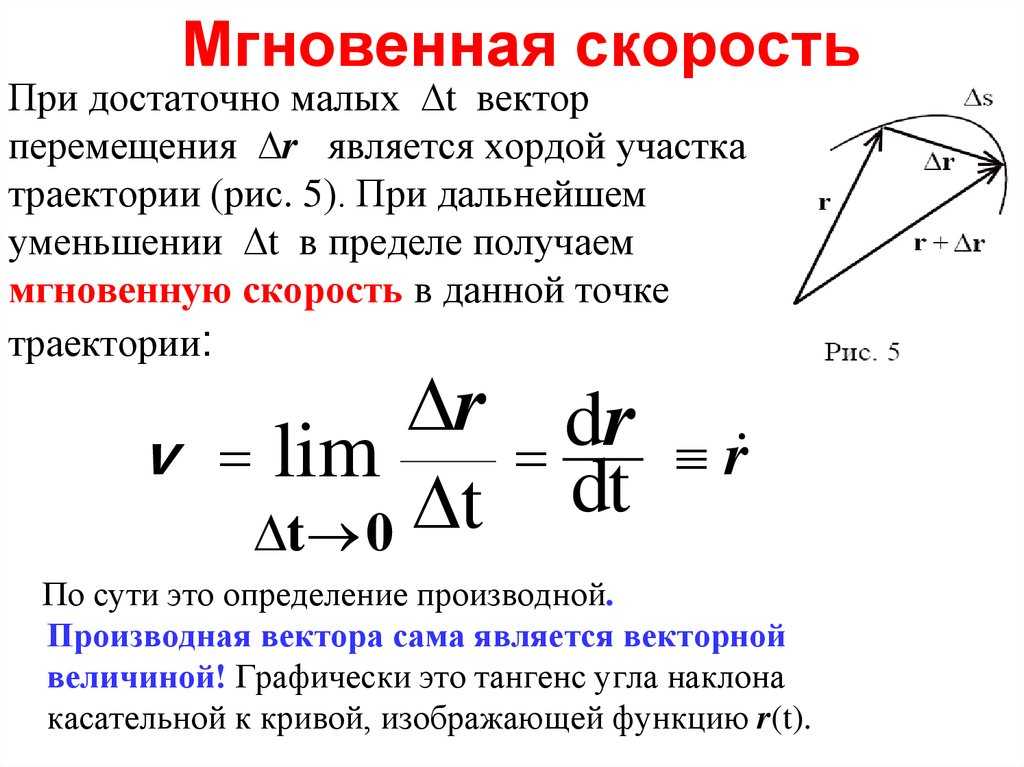
Скоростью называется быстрота изменения координат во времени. Математически эта величина равна производной по времени пройденного пути, то есть:
v¯ = dl¯/dt.
Здесь вектор l¯ направлен от начальной точки пути к конечной.
В свою очередь ускорение – это скорость, с которой изменяется во времени сама скорость. В виде формулы оно может быть записано так:
a¯ = dv¯/dt.

Очевидно, что взяв вторую производную от вектора перемещения l¯ по времени, мы также получим значение ускорения.
Поскольку скорость измеряется в метрах в секунду, то ускорение, согласно записанному выражению, измеряется в метрах в секунду в квадрате.
Куда направлены векторы ускорения и скорости?
В физике всякое механическое движение тела принято характеризовать определенной траекторией. Последняя представляет собой некоторую воображаемую кривую, вдоль которой тело перемещается в пространстве. Например, прямая линия или окружность – это яркие примеры распространенных траекторий движения.
Вектор скорости тела направлен в сторону движения всегда, независимо от того, замедляется или ускоряется тело, движется оно по прямой или по кривой. Если говорить геометрическими терминами, то вектор скорости направлен по касательной к точке траектории, в которой в данный момент находится тело.
Вектор ускорения точки материальной или тела не имеет ничего общего со скоростью.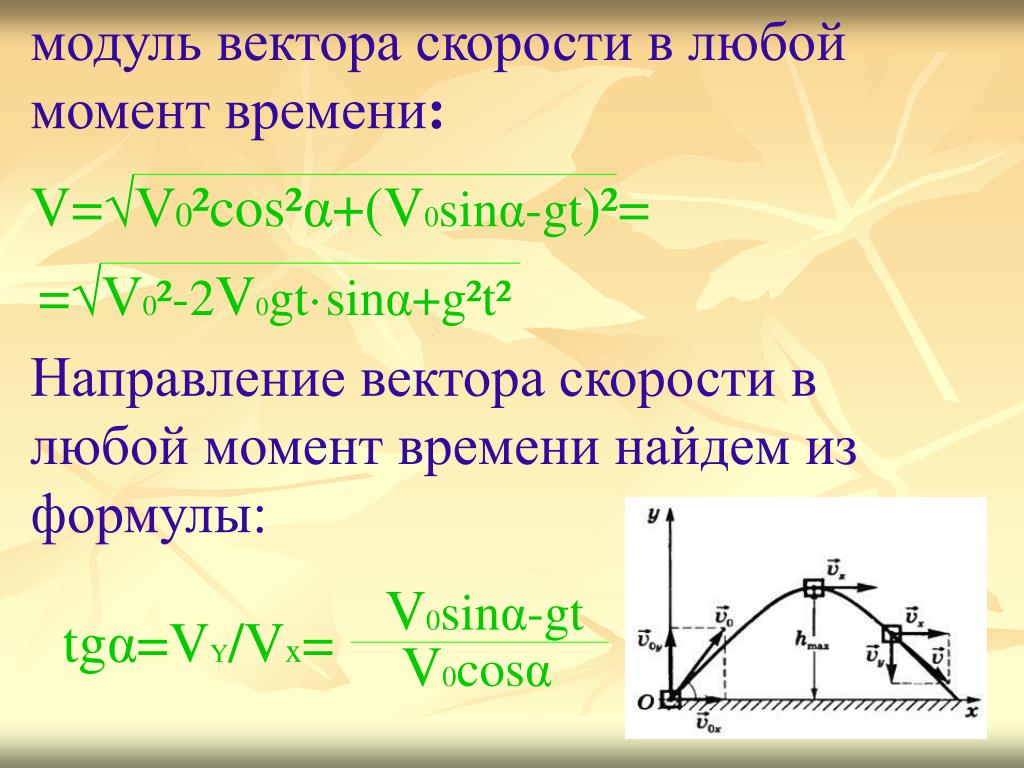 Этот вектор направлен в сторону изменения скорости. Например, для прямолинейного движения величина a¯ может как совпадать по направлению с v¯, так и быть противоположной v¯.
Этот вектор направлен в сторону изменения скорости. Например, для прямолинейного движения величина a¯ может как совпадать по направлению с v¯, так и быть противоположной v¯.
Действующая на тело сила и ускорение
Мы выяснили, что вектор ускорения тела направлен в сторону изменения вектора скорости. Тем не менее не всегда можно легко определить, как меняется скорость в данной точке траектории. Более того, для определения изменения скорости необходимо выполнить операцию разности векторов. Чтобы избежать этих трудностей в определении направления вектора a¯, существует еще один способ быстро его узнать.
Ниже записан знаменитый и хорошо известный каждому школьнику закон Ньютона:
F¯ = m*a¯.
Формула показывает, что причиной возникновения ускорения у тел является действующая на них сила. Поскольку масса m является скаляром, то вектор силы F¯ и вектор ускорения a¯ направлены одинаково. Этот факт следует запомнить и применять на практике всегда, когда возникает необходимость в определении направления величины a¯.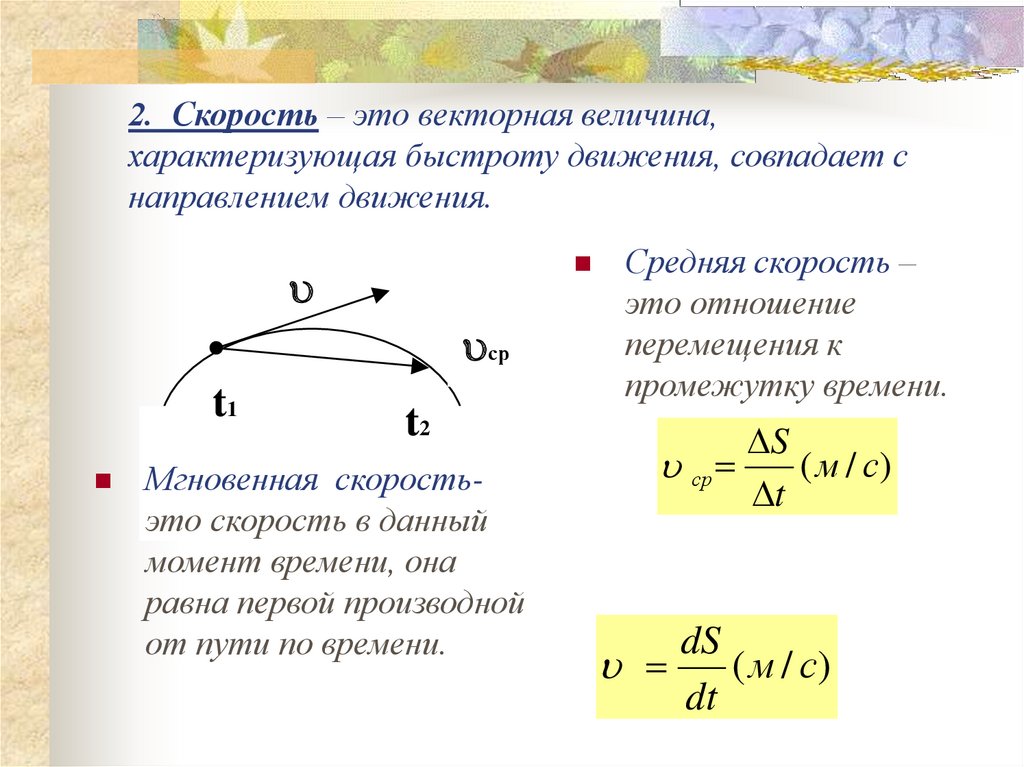
Если на тело действуют несколько разных сил, тогда направление вектора ускорения будет равно результирующему вектору всех сил.
Движение по окружности и ускорение
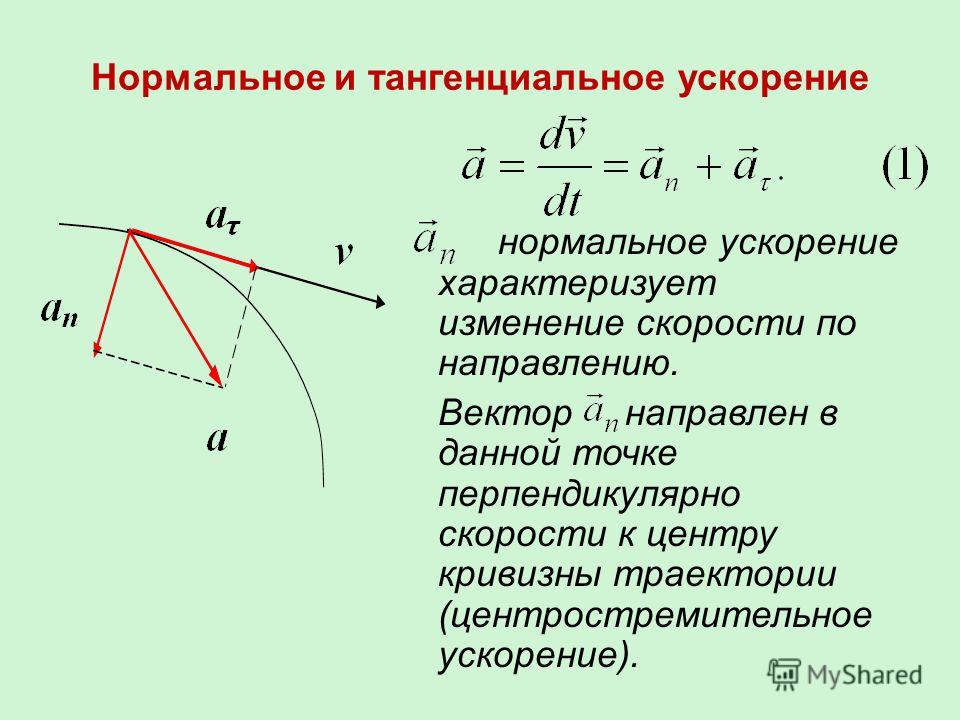
Когда тело перемещается по прямой линии, то ускорение направлено либо вперед, либо назад. В случае же движения по окружности ситуация усложняется тем, что вектор скорости постоянно меняет свое направление. В виду сказанного, полное ускорение определяется двумя его составляющими: тангенциальным и нормальным ускорениями.
Тангенциальное ускорение направлено точно так же, как вектор скорости, или против него. Иными словами, эта компонента ускорения направлена вдоль касательной к траектории. Ускорение тангенциальное описывает изменение модуля самой скорости.
Ускорение нормальное направлено вдоль нормали к данной точке траектории с учетом ее кривизны. В случае движения по окружности вектор этой компоненты указывает на центр, то есть нормальное ускорение направлено вдоль радиуса вращения. Эту компоненту часто называют центростремительной.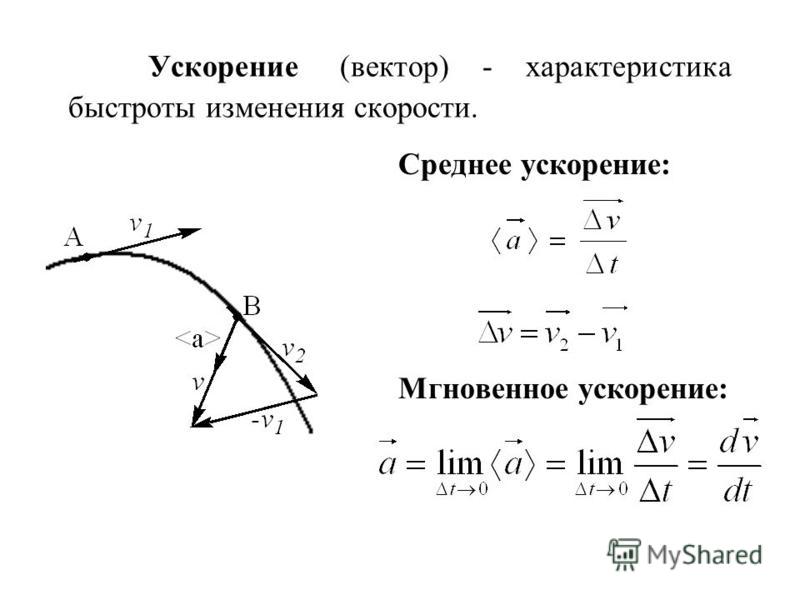
Полное ускорение представляет собой сумму названных компонент, поэтому его вектор может быть направлен произвольным образом по отношению к линии окружности.
Если тело совершает вращение без изменения линейной скорости, то существует отличная от нуля только нормальная компонента, поэтому вектор полного ускорения направлен к центру окружности. Заметим, что к этому центру также действует сила, удерживающая тело на его траектории. Например, сила гравитации Солнца удерживает нашу Землю и другие планеты на своих орбитах.
Векторы ускорения и скорости. Ускорение и сила. Направления тангенциального и нормального ускорений
Как известно, любая физическая величина относится к одному из двух типов, она является либо скалярной, либо векторной. В данной статье рассмотрим такие кинематические характеристики как скорость и ускорение, а также покажем, куда направлены векторы ускорения и скорости.
Что такое скорость и ускорение?
Обе величины, названные в этом пункте, являются важными характеристиками любого вида движения, будь то перемещение тела по прямой линии или по криволинейной траектории.
Скоростью называется быстрота изменения координат во времени. Математически эта величина равна производной по времени пройденного пути, то есть:
v¯ = dl¯/dt.
Здесь вектор l¯ направлен от начальной точки пути к конечной.
В свою очередь ускорение – это скорость, с которой изменяется во времени сама скорость. В виде формулы оно может быть записано так:
a¯ = dv¯/dt.
Очевидно, что взяв вторую производную от вектора перемещения l¯ по времени, мы также получим значение ускорения.
Поскольку скорость измеряется в метрах в секунду, то ускорение, согласно записанному выражению, измеряется в метрах в секунду в квадрате.
Куда направлены векторы ускорения и скорости?
В физике всякое механическое движение тела принято характеризовать определенной траекторией. Последняя представляет собой некоторую воображаемую кривую, вдоль которой тело перемещается в пространстве. Например, прямая линия или окружность – это яркие примеры распространенных траекторий движения.
Вектор скорости тела направлен в сторону движения всегда, независимо от того, замедляется или ускоряется тело, движется оно по прямой или по кривой. Если говорить геометрическими терминами, то вектор скорости направлен по касательной к точке траектории, в которой в данный момент находится тело.
Вектор ускорения точки материальной или тела не имеет ничего общего со скоростью. Этот вектор направлен в сторону изменения скорости. Например, для прямолинейного движения величина a¯ может как совпадать по направлению с v¯, так и быть противоположной v¯.
Действующая на тело сила и ускорение
Мы выяснили, что вектор ускорения тела направлен в сторону изменения вектора скорости. Тем не менее не всегда можно легко определить, как меняется скорость в данной точке траектории. Более того, для определения изменения скорости необходимо выполнить операцию разности векторов. Чтобы избежать этих трудностей в определении направления вектора a¯, существует еще один способ быстро его узнать.
Ниже записан знаменитый и хорошо известный каждому школьнику закон Ньютона:
F¯ = m*a¯.
Формула показывает, что причиной возникновения ускорения у тел является действующая на них сила. Поскольку масса m является скаляром, то вектор силы F¯ и вектор ускорения a¯ направлены одинаково. Этот факт следует запомнить и применять на практике всегда, когда возникает необходимость в определении направления величины a¯.
Если на тело действуют несколько разных сил, тогда направление вектора ускорения будет равно результирующему вектору всех сил.
Движение по окружности и ускорение
Когда тело перемещается по прямой линии, то ускорение направлено либо вперед, либо назад. В случае же движения по окружности ситуация усложняется тем, что вектор скорости постоянно меняет свое направление. В виду сказанного, полное ускорение определяется двумя его составляющими: тангенциальным и нормальным ускорениями.
Тангенциальное ускорение направлено точно так же, как вектор скорости, или против него. Иными словами, эта компонента ускорения направлена вдоль касательной к траектории. Ускорение тангенциальное описывает изменение модуля самой скорости.
Иными словами, эта компонента ускорения направлена вдоль касательной к траектории. Ускорение тангенциальное описывает изменение модуля самой скорости.
Ускорение нормальное направлено вдоль нормали к данной точке траектории с учетом ее кривизны. В случае движения по окружности вектор этой компоненты указывает на центр, то есть нормальное ускорение направлено вдоль радиуса вращения. Эту компоненту часто называют центростремительной.
Полное ускорение представляет собой сумму названных компонент, поэтому его вектор может быть направлен произвольным образом по отношению к линии окружности.
Если тело совершает вращение без изменения линейной скорости, то существует отличная от нуля только нормальная компонента, поэтому вектор полного ускорения направлен к центру окружности. Заметим, что к этому центру также действует сила, удерживающая тело на его траектории. Например, сила гравитации Солнца удерживает нашу Землю и другие планеты на своих орбитах.
4.2: Векторы смещения и скорости
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 45972
- OpenStax
- OpenStax
ЦЕЛИ ОБУЧЕНИЯ
- Расчет векторов положения в многомерной задаче смещения.

- Решите для смещения в двух или трех измерениях.
- Вычислить вектор скорости по заданному вектору положения как функцию времени.
- Рассчитать среднюю скорость в нескольких измерениях.
Перемещение и скорость в двух или трех измерениях являются прямым расширением одномерных определений. Однако теперь они являются векторными величинами, поэтому вычисления с ними должны следовать правилам векторной алгебры, а не скалярной алгебры.
Вектор смещения
Чтобы описать движение в двух и трех измерениях, мы должны сначала установить систему координат и соглашение для осей. Обычно мы используем координаты \(x\), \(y\) и \(z\), чтобы определить местонахождение частицы в точке \(P(x, y, z)\) в трех измерениях. Если частица движется, переменные \(x\), \(y\) и \(z\) являются функциями времени (\(t\)):
\[x = x(t) \quad y = y(t) \quad z = z(t) \ldotp \label{4.1}\]
Вектор положения из начала системы координат в точку P равен \(\vec{r}(t)\ ). В обозначении единичного вектора, введенном в книге «Системы координат и компоненты вектора», \(\vec{r}\)(t) равно 9.0044
В обозначении единичного вектора, введенном в книге «Системы координат и компоненты вектора», \(\vec{r}\)(t) равно 9.0044
\[\vec{r} (t) = x(t)\; \шляпа{я} + у(т)\; \шляпа{j} + z(t)\; \hat{k} \ldotp \label{4.2}\]
На рисунке \(\PageIndex{1}\) показаны система координат и вектор в точку \(P\), где частица может находиться в определенной время \(t\). Обратите внимание на ориентацию осей x, y и z. Эта ориентация называется правой системой координат и используется на протяжении всей главы.
Рисунок \(\PageIndex{1}\): Трехмерная система координат с частицей в положении \(P(x(t), y(t), z(t))\). С нашим определением положения частицы в трехмерном пространстве мы можем сформулировать трехмерное смещение. На рисунке \(\PageIndex{3}\) показана частица в момент времени t 1 , расположенная в точке P 1 с вектором положения \(\vec{r}\)(t 1 ). В более позднее время t 2 частица находится в точке P 2 с вектором положения \(\vec{r}\)(t 2 ). Вектор смещения \(\Delta \vec{r}\) находится путем вычитания \(\vec{r}(t_1)\) из \(\vec{r}(t_2)\):
Вектор смещения \(\Delta \vec{r}\) находится путем вычитания \(\vec{r}(t_1)\) из \(\vec{r}(t_2)\):
\[\Delta \vec{r} = \vec{r} (t_{2}) – \vec{r} (t_{1}) \ldotp \label{4.3}\]
Добавление вектора обсуждается в Векторах. Обратите внимание, что это та же самая операция, которую мы проделали в одном измерении, но теперь векторы находятся в трехмерном пространстве.
Рисунок \(\PageIndex{2}\): смещение \(\Delta \vec{r} = \vec{r}(t_2) − \vec{r}(t_1)\) является вектором из \(P_1 \) в \(P_2\).Следующие примеры иллюстрируют концепцию смещения в нескольких измерениях
Пример 4.1: полярно-орбитальный спутник
Спутник находится на круговой полярной орбите вокруг Земли на высоте 400 км, что означает, что он проходит прямо над Северным и Южным полюсами. Каковы величина и направление вектора смещения от момента, когда он находится прямо над Северным полюсом, до момента, когда он находится на широте -45 °?
Стратегия
Мы делаем картину проблемы, чтобы визуализировать решение графически. Это поможет нам понять смещение. Затем мы используем единичные векторы для решения смещения.
Это поможет нам понять смещение. Затем мы используем единичные векторы для решения смещения.
Решение
На рисунке \(\PageIndex{3}\) показана поверхность Земли и круг, представляющий орбиту спутника. Хотя спутники движутся в трехмерном пространстве, они следуют траекториям эллипсов, которые можно изобразить в двух измерениях. Векторы положения взяты из центра Земли, который мы принимаем за начало системы координат, с осью Y как север и осью X как восток. Вектор между ними есть смещение спутника. Мы принимаем радиус Земли равным 6370 км, поэтому длина каждого вектора положения составляет 6770 км.
Рисунок \(\PageIndex{3}\): Два вектора положения проведены из центра Земли, который является началом системы координат, с осью Y на севере и осью X на востоке. Вектор между ними есть смещение спутника.В представлении единичного вектора векторы положения равны
\[ \begin{align*} \vec{r}(t_{1}) &= 6770 \ldotp \; км\; \hat{j} \\[4pt] \vec{r}(t_{2}) &= 6770 \ldotp \; км (\cos (-45°))\; \шляпа{i} + 6770 \ldotp \; км (\sin(−45°))\; \шляпа{j} \ldotp \end{align*}\]
Вычисляя синус и косинус, мы имеем
\[ \begin{align*} \vec{r}(t_{1}) &= 6770 \ldotp \hat{j} \\[4pt] \vec{r }(t_{2}) &= 4787\; \ шляпа {я} – 4787 \; \hat{j} \ldotp \end{align*}\]
Теперь мы можем найти \(\Delta \vec{r}\), смещение спутника:
\[\Delta \vec{r} = \vec{r} (t_{2}) – \vec{r} (t_{1}) = 4787\; \шляпа{я} – 11 557\; \hat{j} \ldotp \nonumber\]
Величина смещения
\[|\Delta \vec{r}| = \sqrt{(4787)^{2} + (-11 557)^{2}} = 12 509{o} \nonumber. \]
\]
Значимость
Построение графика смещения дает информацию и значение для решения задачи в виде единичного вектора. При построении смещения нам необходимо включить его компоненты, а также его величину и угол, который оно образует с выбранной осью — в данном случае с осью x (рис. \(\PageIndex{4}\)).
Рисунок \(\PageIndex{4}\): Вектор смещения с компонентами, углом и величиной.Обратите внимание, что в этом примере спутник прошел криволинейный путь вдоль своей круговой орбиты, чтобы добраться из начального положения в конечное. Он также мог пройти 4787 км на восток, затем 11 557 км на юг, чтобы достичь того же места. Оба этих пути длиннее, чем длина вектора смещения. Фактически вектор смещения задает кратчайший путь между двумя точками в одном, двух или трех измерениях.
Многие приложения в физике могут иметь серию перемещений, как обсуждалось в предыдущей главе. Общее смещение — это сумма индивидуальных смещений, только на этот раз нам нужно быть осторожными, потому что мы добавляем векторы. Проиллюстрируем это понятие на примере броуновского движения.
Проиллюстрируем это понятие на примере броуновского движения.
Пример 4.2: Броуновское движение
Броуновское движение – это хаотическое беспорядочное движение взвешенных в жидкости частиц, возникающее в результате столкновений с молекулами жидкости. Это движение трехмерно. Смещения в числовом порядке частицы, совершающей броуновское движение, могут выглядеть следующим образом в микрометрах (рис. \(\PageIndex{5}\)):
\[\Delta \vec{r}_{1} = 2,0\; \шляпа{i} + \шляпа{j} + 3.0 \шляпа{k}\]
\[\Delta \vec{r}_{2} = – \шляпа{i} + 3.0\; \шляпа{к}\]
\[\Delta \vec{r}_{3} = 4.0\; \шляпа{я} -2.0\; \шляпа{j} + \шляпа{к}\]
\[\Delta \vec{r}_{4} = -3.0\; \шляпа{я} + \шляпа{j} + 3.0\; \hat{k} \ldotp\]
Каково полное смещение частицы от начала координат?
Рисунок \(\PageIndex{5}\): Траектория частицы, совершающей случайные смещения броуновского движения. Общее смещение показано красным.Решение
Формируем сумму перемещений и складываем их в виде векторов:
\[\begin{split} \Delta \vec{r}_{Total} & = \sum \Delta \vec{r}_{ i} = \Delta \vec{r}_{1} + \Delta \vec{r}_{2} + \Delta \vec{r}_{3} + \Delta \vec{r}_{4} \\ & = (2,0 – 1,0 + 4,0 – 3,0)\; \шляпа{i} + (1,0 + 0 – 2,0 + 1,0)\; \ шляпа {j} + (3,0 + 3,0 + 1,0 + 2,0) \; \шляпа{к} \\ & = 2. 0\; \шляпа{я} + 0\; \шляпа{j} + 9.0\; \шляпа{к}\; \mu m \ldotp \end{split}\]
0\; \шляпа{я} + 0\; \шляпа{j} + 9.0\; \шляпа{к}\; \mu m \ldotp \end{split}\]
Чтобы завершить решение, мы выражаем смещение как величину и направление, 9{o},\]
относительно оси x в плоскости xz.
Значимость
Из рисунка видно, что величина полного смещения меньше суммы величин отдельных перемещений.
Вектор скорости
В предыдущей главе мы нашли мгновенную скорость, вычислив производную функции положения по времени. Мы можем сделать ту же операцию в двух и трех измерениях, но мы используем векторы. Мгновенное вектор скорости теперь равен
\[\vec{v} (t) = \lim_{\Delta t \rightarrow 0} \frac{\vec{r} (t + \Delta t) – \vec{r} (t)}{\Delta t} = \frac{d \vec{r}}{dt} \ldotp \label{4.4}\]
Давайте посмотрим на относительную ориентацию вектора положения и вектора скорости графически. На рисунке \(\PageIndex{6}\) показаны векторы \(\vec{r}\)(t) и \(\vec{r}\)(t + \(\Delta\)t), которые укажите положение частицы, движущейся по пути, представленному серой линией.
Уравнение \ref{4.4} можно также записать в терминах компонентов \(\vec{v}\)(t). Так как
\[\vec{r} (t) = x(t)\; \шляпа{я} + у(т)\; \шляпа{j} + z(t)\; \hat{k},\]
мы можем написать
\[\vec{v} (t) = v_{x} (t)\; \шляпа{я} + v_{у} (т)\; \шляпа{j} + v_{z} (t)\; \шляпа{к} \метка{4.5}\]
, где
\[v_{x} (t) = \frac{dx(t)}{dt}, \quad v_{y} (t) = \frac{dy(t)}{dt}, \ quad v_{z} (t) = \frac{dz(t)}{dt} \ldotp \label{4.6}\]
Если речь идет только о средней скорости, мы имеем векторный эквивалент одномерной средняя скорость для двух и трех измерений:
\[\vec{v}_{avg} = \frac{\vec{r} (t_{2}) – \vec{r} (t_{1})}{ t_{2} – t_{1}} \ldotp \label{4. {2}} = 9.9\; м/с \ldotp$$
{2}} = 9.9\; м/с \ldotp$$
Значение
Мы видим, что средняя скорость такая же, как и мгновенная скорость в момент времени t = 2,0 с, поскольку функция скорости является линейной. Этого не должно быть в общем случае. Фактически, в большинстве случаев мгновенная и средняя скорости не совпадают.
Упражнение 4.1
Функция положения частицы: ). а) Чему равна мгновенная скорость в момент времени t = 3 с? (b) Равна ли средняя скорость между 2 и 4 с мгновенной скорости в момент времени t = 3 с?
Независимость перпендикулярных движений
Когда мы смотрим на трехмерные уравнения для положения и скорости, записанные в виде единичного вектора, уравнение \ref{4. 2} и уравнение \ref{4.5}, мы видим, что компоненты этих уравнений равны отдельные и уникальные функции времени, не зависящие друг от друга. Движение по оси x не имеет части от движения по направлениям y и z, и аналогично для двух других осей координат. Таким образом, движение объекта в двух или трех измерениях можно разделить на отдельные независимые движения вдоль перпендикулярных осей той системы координат, в которой происходит движение.
2} и уравнение \ref{4.5}, мы видим, что компоненты этих уравнений равны отдельные и уникальные функции времени, не зависящие друг от друга. Движение по оси x не имеет части от движения по направлениям y и z, и аналогично для двух других осей координат. Таким образом, движение объекта в двух или трех измерениях можно разделить на отдельные независимые движения вдоль перпендикулярных осей той системы координат, в которой происходит движение.
Чтобы проиллюстрировать эту концепцию в отношении смещения, рассмотрим женщину, идущую из точки А в точку Б в городе с квадратными кварталами. Женщина, идущая по пути из А в В, может пройти столько-то блоков на восток, а затем на север (два перпендикулярных направления) за еще один набор блоков, чтобы добраться до В. То, насколько далеко она пойдет на восток, зависит только от ее движения на восток. Точно так же на то, как далеко она пойдет на север, влияет только ее движение на север.
Независимость движения
В кинематическом описании движения мы можем рассматривать горизонтальную и вертикальную составляющие движения отдельно. Во многих случаях движение в горизонтальном направлении не влияет на движение в вертикальном направлении, и наоборот.
Во многих случаях движение в горизонтальном направлении не влияет на движение в вертикальном направлении, и наоборот.
Примером, иллюстрирующим независимость вертикального и горизонтального движений, являются два бейсбольных мяча. Один бейсбольный мяч выпадает из состояния покоя. В тот же момент с той же высоты горизонтально брошен другой снаряд, летящий по криволинейной траектории. Стробоскоп фиксирует положение шаров через фиксированные промежутки времени по мере их падения (рис. \(\PageIndex{7}\)).
Примечательно, что при каждой вспышке стробоскопа вертикальное положение двух шаров одинаково. Это сходство подразумевает, что вертикальное движение не зависит от того, движется ли мяч горизонтально. (Если предположить отсутствие сопротивления воздуха, вертикальное движение падающего объекта зависит только от силы тяжести, а не от каких-либо горизонтальных сил.) Тщательное изучение мяча, брошенного горизонтально, показывает, что он проходит такое же расстояние по горизонтали между вспышками. Это связано с тем, что после броска на мяч в горизонтальном направлении не действуют дополнительные силы. Этот результат означает, что горизонтальная скорость постоянна и не зависит ни от вертикального движения, ни от гравитации (которая является вертикальной). Обратите внимание, что этот случай верен только для идеальных условий. В реальном мире сопротивление воздуха влияет на скорость мячей в обоих направлениях.
Двумерная кривая траектория горизонтально брошенного мяча состоит из двух независимых одномерных движений (горизонтального и вертикального).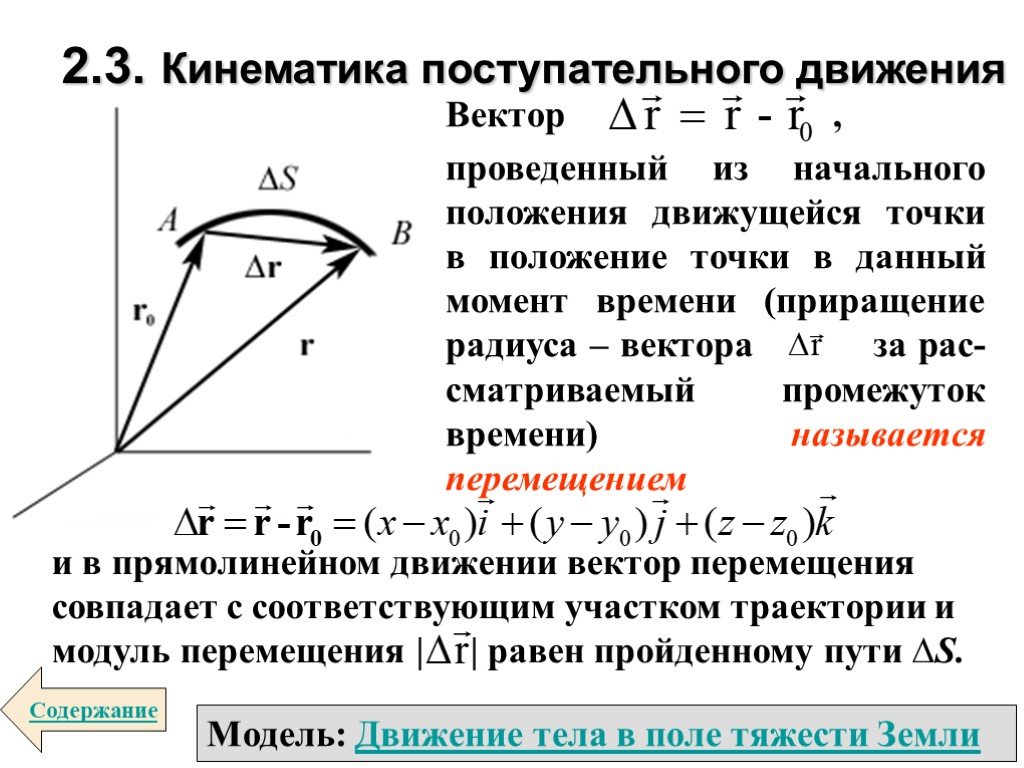 Ключ к анализу такого движения, называемого движением снаряда , состоит в том, чтобы разложить его на движения в перпендикулярных направлениях. Разложение двумерного движения на перпендикулярные компоненты возможно, поскольку компоненты независимы.
Ключ к анализу такого движения, называемого движением снаряда , состоит в том, чтобы разложить его на движения в перпендикулярных направлениях. Разложение двумерного движения на перпендикулярные компоненты возможно, поскольку компоненты независимы.
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- ОпенСтакс
- Лицензия
- СС BY
- Программа OER или Publisher
- ОпенСтакс
- Показать оглавление
- нет
- Включено
- да
- Теги
- https://phys.
 libretexts.org/TextMaps/General_Physics_TextMaps/Map%3A_University_Physics_(OpenStax)/Map%3A_University_Physics_I_(OpenStax)/4%3A_Motion_in_Two_and_Three_Dimensions/4.2%3A_Acceleration_Vector
libretexts.org/TextMaps/General_Physics_TextMaps/Map%3A_University_Physics_(OpenStax)/Map%3A_University_Physics_I_(OpenStax)/4%3A_Motion_in_Two_and_Three_Dimensions/4.2%3A_Acceleration_Vector - источник[1]-физ-3985
- вектор скорости
- https://phys.
Как найти векторы скорости и ускорения — Криста Кинг Математика
Векторы положения, скорости и ускорения
Дана функция положения ???r(t)??? который моделирует положение объекта во времени, скорость ???v(t)??? является производной положения и ускорения ???a(t)??? является производной скорости, что означает, что ускорение также является второй производной положения.
Привет! Я Криста.
Я создаю онлайн-курсы, чтобы помочь вам в учебе по математике. Читать далее.
Поскольку мы знаем, что производная от положения есть скорость, а производная от скорости есть ускорение, значит, мы можем пойти и другим путем и сказать, что интеграл от ускорения есть скорость, а интеграл от скорости есть положение.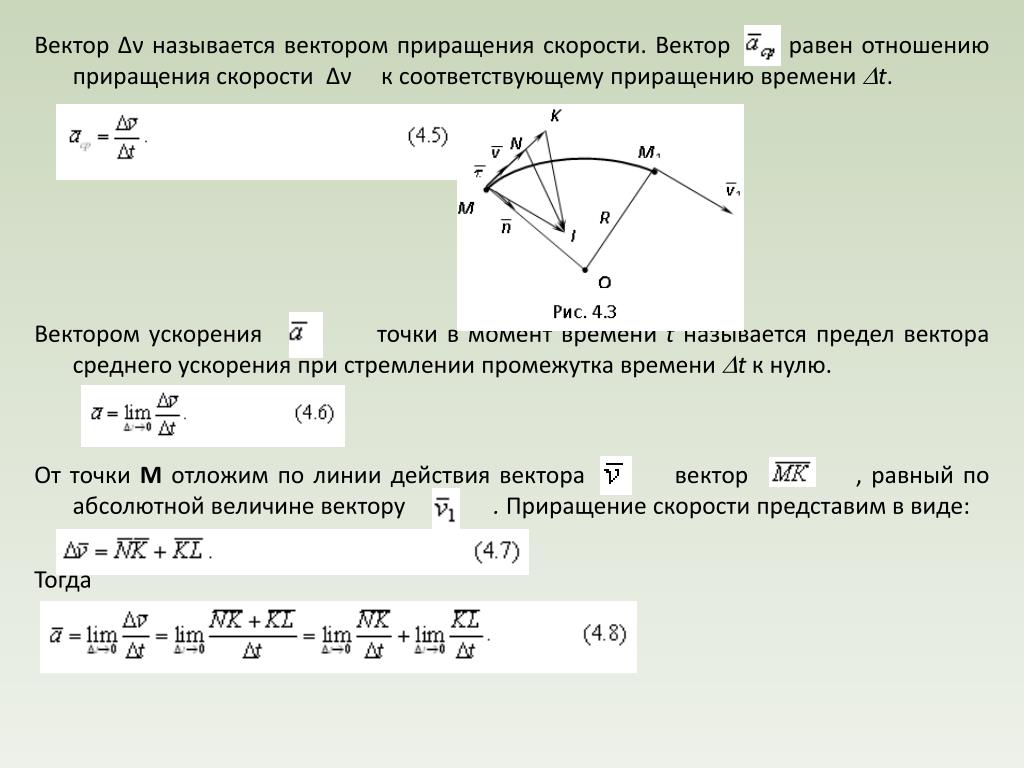
Нахождение векторов скорости и ускорения по вектору положения
Пройти курс
Хотите узнать больше об исчислении 3? У меня есть пошаговый курс для этого. 🙂
Учить больше
Нахождение положения с учетом ускорения и начальных условий
Пример
Нахождение функции положения, если ускорение определяется как ???a(t)=2\bold i+\bold j+3\bold k???, и если ???v(0)=\жирный j-\жирный k??? и ???r(0)=\жирный i+2\жирный j-\жирный k???.
Нам дали ускорение, и нам нужно найти позицию, а значит, нам нужно выполнить некоторую интеграцию. Мы начнем с интегрирования ускорения, чтобы получить скорость.
???v(t)=\int a(t)\ dt=\жирный i\int 2\ dt+\жирный j\int 1\ dt+\жирный k\int 3\ dt???
???v(t)=2t\жирный i+t\жирный j+3t\жирный k+C???
Без какой-либо другой информации мы не смогли бы вычислить значение ???C???.