1. Материальная точка. Система отсчета. Траектория, путь, перемещение. Скорость. Формулы пути и скорости.
Простейшей, предельно абстрактной идеализацией движущегося тела в механике является материальная точка – тело, размерами и формой которого в условиях соответствующей конкретной задачи можно пренебречь.
Относительный
характер механического движения
предполагает и требует введения систем
отсчёта при его описании. Под системой
отсчёта понимают систему
координат (обычно декартову), начало
которой связывается с некоторым телом
отсчёта.
Предполагается также наличие в системе
отсчета линеек и часов, то есть инструментов
для отсчета пространственных и временных
интервалов (длин и длительностей).
Исходная кинематическая определённость
точечного тела – его положение –
задаётся с помощью радиус-вектора r, проводимого
из начала системы координат в движущееся
тело (точку),
или скалярно с помощью координат точки
х, у, z. Векторный(Символы векторных
величин обозначаются в данном тексте
жирным шрифтом.
r = iх + kу + jz, где х, у, z – проекции точки (конца радиус – вектора r) на соответствующие оси координат, а i, k, j – орты (единичные векторы) осей Х, Y, Z. При движении тела конец его радиус – вектора описывает линию, называемую траекторией (линия, вдоль которой движется тело). Уравнение траектории движения точки представляет взаимосвязь ее координат и для плоского (двумерного) движения обычно выражается зависимостью у = (х). Изменение местоположения тела за время t задаётся или вектором перемещения r, проводимым из начального в конечное местоположение тела
r = r – rо,
т. е. вектор перемещения r,
представляет собой приращение радиус – вектора r тела (разность между конечным и
начальным значениями r).
Обычно модуль перемещения r меньше пройденного точкой пути S. Однако при t 0, r dr и модуль |dr| элементарного (физически бесконечно малого) перемещения dr стремится к длине дуги, то есть к пути dS (длина дуги dS траектории сравнивается с длиной dr секущей).
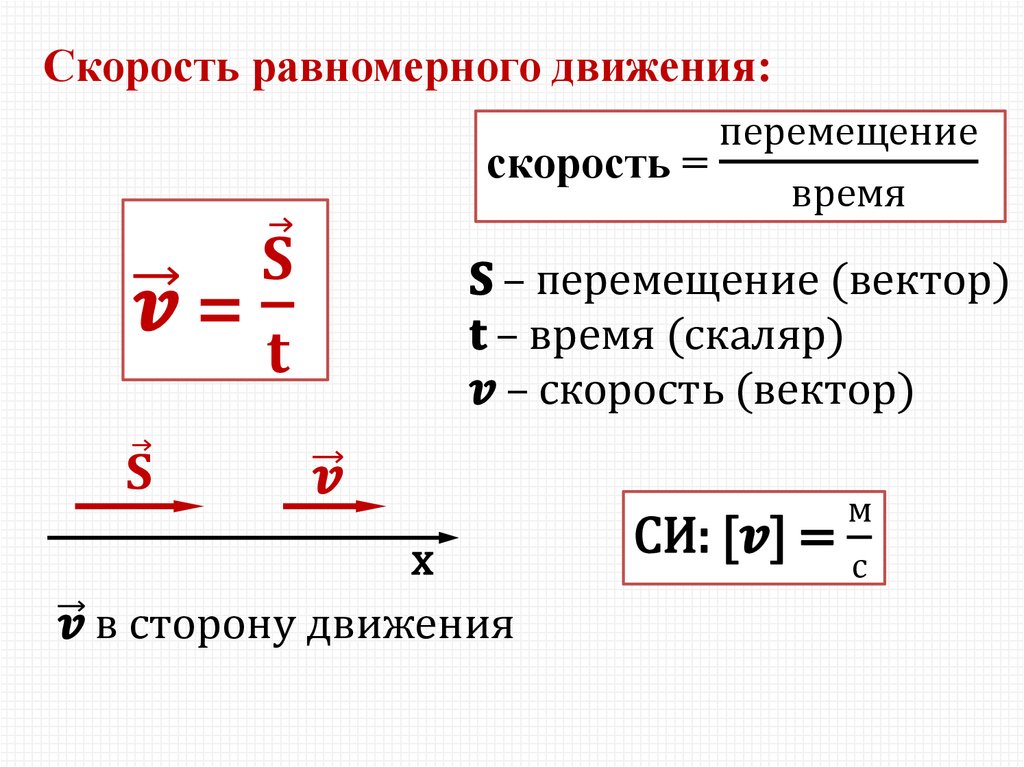
Быстрота движения, т. е. быстрота изменения местоположения тела, быстрота прохождения им пути или совершения перемещения характеризуется, величиной, называемой скоростью. Различают среднюю и мгновенную скорости, которые, в свою очередь, подразделяют на скалярные (выражаемые через путь) и векторные скорости, выражаемые через перемещение.
Под средней путевой скоростью понимают величину, измеряемую отношением всего пройденного телом пути S ко времени t его прохождения:
= S/t, [] = м/с.
Под мгновенной скоростью
 ) t
в момент, в мгновение (при t = t
0), то есть
= lim
S/t
= dS/dt
= S.
) t
в момент, в мгновение (при t = t
0), то есть
= lim
S/t
= dS/dt
= S.С формальной стороны мгновенная путевая скорость = dS/dt представляет собой производную от пути по времени. В физике ее допускается трактовать как отношение элементарных (физически бесконечно малых) приращений пути dS и времени dt.
Мгновенная векторная скорость понимается как предел отношения совершённого телом перемещения r ко времени t его совершения, при условии, что t 0:
= lim r/t = dr/dt = r – производная от радиус – вектора по времени, которая может быть определена и как отношение элементарных (физически бесконечно малых) перемещения dr и времени dt.
Так же, как и радиус – вектор r, мгновенная векторная скорость может быть записана через проекции на оси координат:
= dr/dt = d/dt(iх + jу + kz) = idх/dt + jdу/dt + kdz/dt = iх + jу + kz
Численное значение (модуль) скорости равно:
=
(х2 + у2 + z2).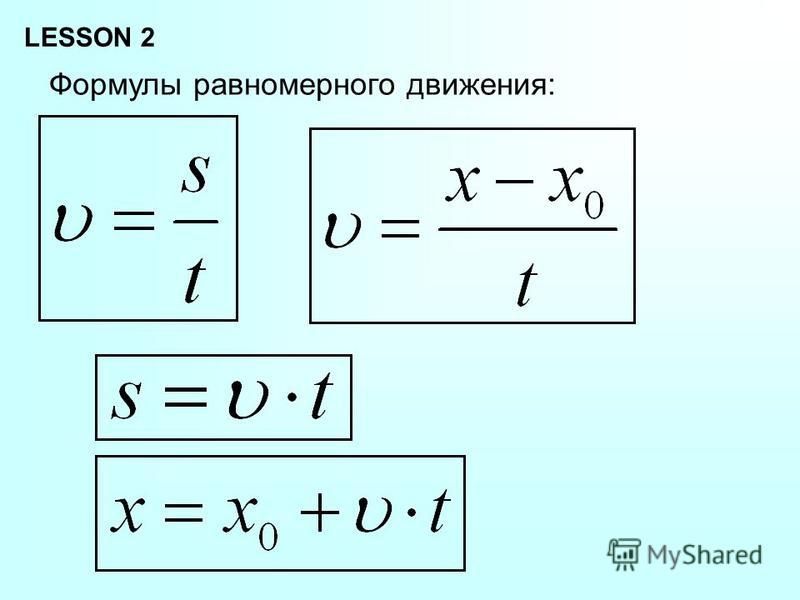 Направление
же вектора мгновенной скорости совпадает
с направлением вектора элементарного
перемещения dr,
направленного по вектору касательной траектории в сторону перемещения тела:
Направление
же вектора мгновенной скорости совпадает
с направлением вектора элементарного
перемещения dr,
направленного по вектору касательной траектории в сторону перемещения тела:
= dr
= , где – единичный вектор ( = 1) касательной к траектории (орт), направленный по направлению движения тела.
Мгновенная путевая скорость = dS/dt, равна численному значению (модулю) мгновенной вектор – скорости = dr/dt, так как при t 0 (при t = dt) длина дуги dS траектории стремится к длине dr секущей.
PhysBook:Электронный учебник физики — PhysBook
Содержание
- 1 Учебники
-
2 Механика
-
2.
 1 Кинематика
1 Кинематика
- 2.2 Динамика
- 2.3 Законы сохранения
- 2.4 Статика
- 2.5 Механические колебания и волны
-
2.
-
3 Термодинамика и МКТ
- 3.1 МКТ
- 3.2 Термодинамика
-
4 Электродинамика
-
4.
 1 Электростатика
1 Электростатика
- 4.2 Электрический ток
- 4.3 Магнетизм
- 4.4 Электромагнитные колебания и волны
-
4.
-
5 Оптика. СТО
- 5.1 Геометрическая оптика
- 5.2 Волновая оптика
- 5.3 Фотометрия
- 5.4 Квантовая оптика
-
5.
 5 Излучение и спектры
5 Излучение и спектры
- 5.6 СТО
-
6 Атомная и ядерная
- 6.1 Атомная физика. Квантовая теория
- 7 Общие темы
- 8 Новые страницы
Здесь размещена информация по школьной физике:
- материалы из учебников, лекций, рефератов, журналов;
- разработки уроков, тем;
- flash-анимации, фотографии, рисунки различных физических процессов;
- ссылки на другие сайты
и многое другое.
Каждый зарегистрированный пользователь сайта имеет возможность выкладывать свои материалы (см. справку), обсуждать уже созданные.
Учебники
Формулы по физике – 7 класс – 8 класс – 9 класс – 10 класс – 11 класс –
Механика
Кинематика
Основные понятия кинематики – Прямолинейное движение – Криволинейное движение – Движение в пространстве
Динамика
Законы Ньютона – Силы в механике – Движение под действием нескольких сил
Законы сохранения
Закон сохранения импульса – Закон сохранения энергии
Статика
Статика твердых тел – Динамика твердых тел – Гидростатика – Гидродинамика
Механические колебания и волны
Механические колебания – Механические волны
Термодинамика и МКТ
МКТ
Основы МКТ – Газовые законы – МКТ идеального газа
Термодинамика
Первый закон термодинамики – Второй закон термодинамики – Жидкость-газ – Поверхностное натяжение – Твердые тела – Тепловое расширение
Электродинамика
Электростатика
Электрическое поле и его параметры – Электроемкость
Электрический ток
Постоянный электрический ток – Электрический ток в металлах – Электрический ток в жидкостях – Электрический ток в газах – Электрический ток в вакууме – Электрический ток в полупроводниках
Магнетизм
Магнитное поле – Электромагнитная индукция
Электромагнитные колебания и волны
Электромагнитные колебания – Производство и передача электроэнергии – Электромагнитные волны
Оптика.
 СТО
СТОГеометрическая оптика
Прямолинейное распространение света. Отражение света – Преломление света – Линзы
Волновая оптика
Свет как электромагнитная волна – Интерференция света – Дифракция света
Фотометрия
Фотометрия
Квантовая оптика
Квантовая оптика
Излучение и спектры
Излучение и спектры
СТО
СТО
Атомная и ядерная
Атомная физика. Квантовая теория
Строение атома – Квантовая теория – Излучение атома
Ядерная физика
Атомное ядро – Радиоактивность – Ядерные реакции – Элементарные частицы
Общие темы
Измерения – Методы решения – Развитие науки- Статья- Как писать введение в реферате- Подготовка к ЕГЭ – Репетитор по физике
Новые страницы
Запрос не дал результатов.
Алонсо, Даниэль | Формулы науки/физики
- ТЕОРЕМА ПИФАГОРА
- Результат в квадрате = квадрат стороны A + квадрат стороны B
- Ч 2 = А2 + В2
- ЗАКОН КОСИНУСА
- Результат в квадрате = квадрат стороны A + квадрат стороны B – сторона A x сторона B x смежный угол
- R2 = A2 + B2 – ABCos
- КОСИНУС
- A x = A cos ( Cos = смежная сторона/гипотенуза)
- СИНУС
- Ay = A sin (Sin = Противоположная сторона/гипотенуза)
- ТАНГЕНТ
- Тан = R y / Rx
- СКОРОСТЬ
- Скорость = Расстояние/Время
- v = д/т
- УСКОРЕНИЕ
- Ускорение = скорость/время
- а = v/t
- а = v2 – v1 / t
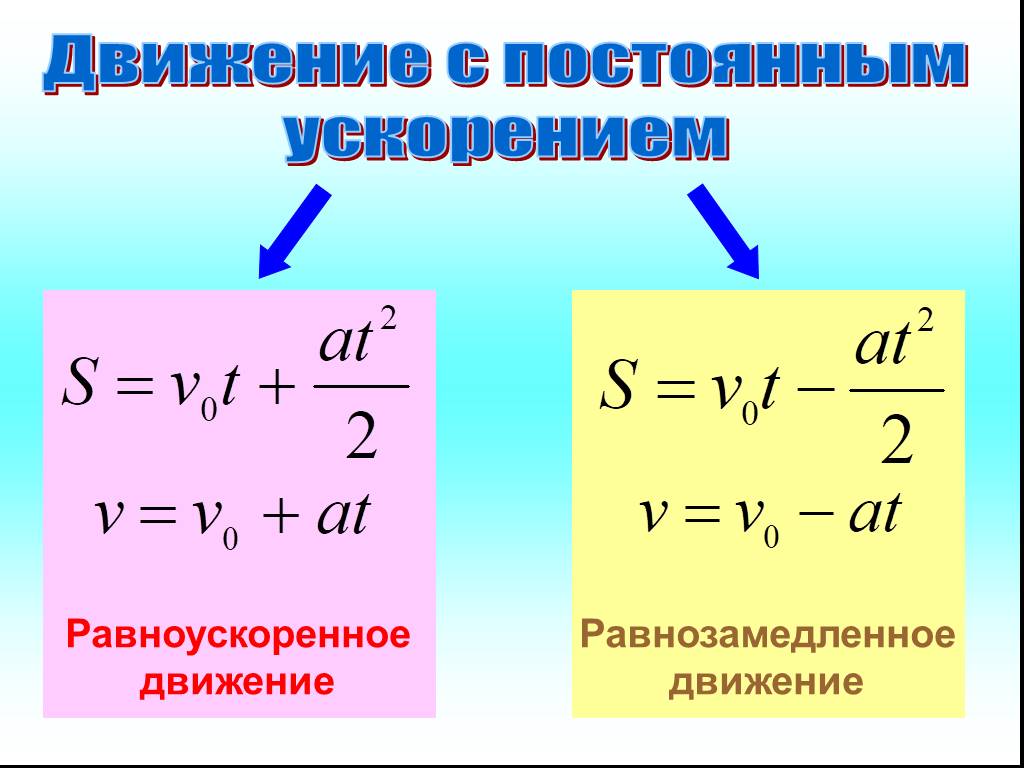
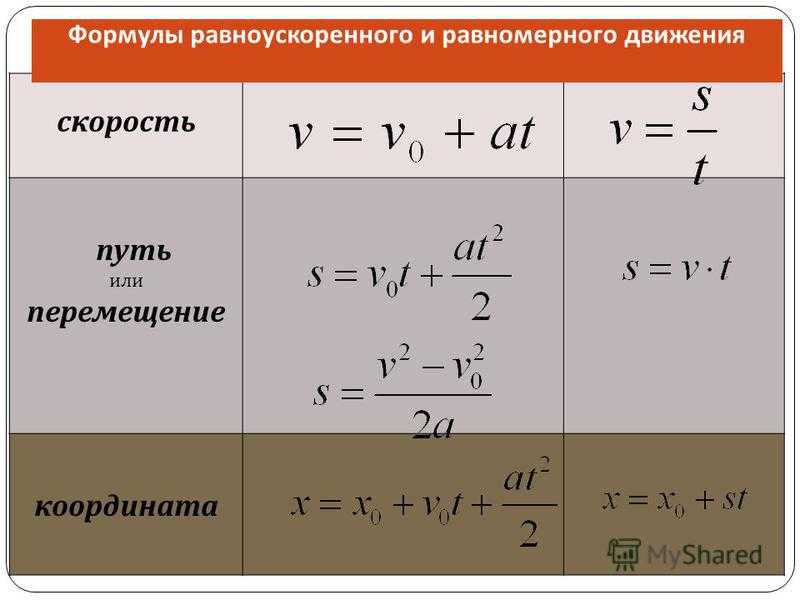
- СКОРОСТЬ С ПОСТОЯННЫМ УСКОРЕНИЕМ
- Конечная скорость = начальная скорость + ускорение x время
- V2 = v1 + at
- КОНЕЧНОЕ ПОЛОЖЕНИЕ (РАССТОЯНИЕ) С ПОСТОЯННЫМ УСКОРЕНИЕМ
- Конечное положение = начальное положение + половина конечной скорости + начальная скорость x время
- D2 = d1 + ½ (v2 + v1)t
- Конечное положение = исходное положение + начальная скорость x время + половина ускорения x время
- D2 = d1 + v1t + ½ на
- КОНЕЧНАЯ СКОРОСТЬ С ПОСТОЯННЫМ УСКОРЕНИЕМ
- Конечная скорость = квадрат начальной скорости + 2 x ускорение x конечное расстояние – начальное расстояние
- V22 = v12 + 2а(d2 – d1)
- ВТОРОЙ ЗАКОН НЬЮТОНА
- Ускорение = чистая сила / масса
- А = Fnet/м
- ВТОРОЙ ЗАКОН НЬЮТОНА КАК ВЕС
- Сила веса = масса x гравитация планеты
- Fw = мг
- ВЕС И УСКОРЕНИЕ
- Сила = масса x ускорение + гравитация планеты
- F = м(а + г)
- КИНЕТИЧЕСКАЯ СИЛА ТРЕНИЯ
- Сила трения = кинетический коэффициент трения x Чистая сила
- Ff = мккFNet
- Пример, толкающая сила = кинетический коэффициент трения x масса x сила тяжести
- Следовательно, Fp = µk x m x g
- ПЕРИОД МАЯТНИКА
- Время = 2 x квадратный корень из длины Пи / гравитация планеты
- Т = 2 л/г
- КРУГОВАЯ СКОРОСТЬ
- Скорость = 2 х пи х радиус / время
- В = 2р/т
- ЦЕНТРОСТРЕМЕННОЕ УСКОРЕНИЕ
- Ускорение = 4 х пи в квадрате х радиус / время в квадрате
- Ас = 42р/т2
- ЦЕНТРОСТРЕМАЛЬНОЕ УСКОРЕНИЕ С СКОРОСТЬЮ
- Ас = v2/r
- ЧАСТОТА
- Частота = 1/время
- Ф = 1/т
- Ускорение
- а = V2/r
- Третий закон Кеплера
- (период 1-й планеты / период 2-й планеты) в квадрате = (радиус 1-й планеты / радиус 2-й планеты) в кубе
(ТА / ТБ)2 = (rA / rB)3
- Закон всемирного тяготения
- Сила = (сила гравитационного притяжения х масса 1-й планеты х масса 2-й планеты) / расстояние в квадрате.