Расчеты, формулы и основные параметры по механике
Механика вместе с математикой и физикой имеет большое образовательное значение: способствует развитию логического мышления и приводит к пониманию весьма широкого круга явлений, относящихся к простейшей форме движущейся материи – механическому движению.
Современное производство, определяющееся высокой механизацией и автоматизацией, предлагает использование большого количества разнообразных машин, механизмов, приборов и других устройств. Конструирование, изготовление, эксплуатация машин невозможна без знаний в области механики.
К основным задачам механики относится изучение:
- общих законов равновесия материальных тел;
- методов расчета элементов конструкций и машин на прочность, жесткость и устойчивость;
- законов движения материальных тел;
- устройства машин и механизмов, их деталей и области их применения.

Методы и приемы технической механики вырабатывает навыки для постановки и решения прикладных задач.
Механическим движением тела называется изменение его положения относительно другого тела, происходящее в пространстве с течением
времени.
Механическим взаимодействием называются такие взаимодействия материальных тел, которые изменяют или стараются изменить характер их
механического движения или формы (создать деформацию).
Техническая механика – дисциплина, вмещающая в себя основные механические дисциплины: теоретическую механику, сопротивление
материалов, теорию машин и механизмов, детали машин и основы конструирования.
Теоретическая механика – это наука, изучающая общие законы механического движения и механического взаимодействия материальных
тел.
Теоретическая механика принадлежит к фундаментальным дисциплинам и создает основу многих инженерных дисциплин. В основе теоретической механики лежат законы, которые называются законами классической механики или законами Ньютона, которые установлены путем обобщения результатов большого количества экспериментов и наблюдений. Их справедливость проверена многовековой практической деятельностью человека.
Их справедливость проверена многовековой практической деятельностью человека.
Таблица 1.
| Параметр | Обозначение |
| Ведущие звенья: (диаметр, окружная скорость, угловая скорость, мощность, вращающий момент на ведущем валу) | d1, v1, ω1, Р1, M1 |
| Ведомые звенья (те же) на ведомом валу | d2, u2, ω2, Р2, M2 |
| Коэффициент полезного действия (КПД) одного звена Общий КПД механизма с n звеньями | η = Р2/Р1 ηобщ = η1 η2 |
| Окружная скорость ведущего или ведомого звена (м/с) | v = ωd/2 |
| Угловая скорость (рад/с) | ω = πn30 = 2v/d |
| Окружная сила передачи (Н) | Ft = Р/v |
| Вращающий момент Т (Н·м) | Т = Р/ω = Ft d/2 = 9,55Р/n |
| Передаточное отношение механической передачи | u12 = ω1/ω2 = n2/n1 u12 = Т2/Т1 = Р2ω1/Р1ω2 = Т2/(ηТ1). |
| Передаточное число цепной передачи | u = ω1/ω2 = z2 /z1 |
| Передаточное отношение механизма с п передачами | uобщ = u1 u2 … un, |
| Передаточное число зубчатой передачи | u = z2/z1 |
| Диаметр делительный прямозубого колеса | d2= z2m |
| Диаметр делительный косозубого колеса | d2= z2m/соsβ |
| Диаметр делительный окружности звездочки | d2 = t/sin (180/z) |
| Мощность электродвигателя (Вт) | Рд ≥ Р = Тω/η = Fv/η |

Таблица 2. Параметры движения в механике
Прямолинейное | |
Обозначения: s — путь, м; t — время, с; vt — скорость, м/с; а — ускорение, м/с2; g — ускорение свободного падения, м/с2; v0 — начальная скорость, м/с | |
| Параметры | Формулы |
| равномерное | |
| равномерно-ускоренное (v0 = 0) | |
| равномерно-ускоренное (v0 ≠ 0) | |
| равномерно-замедленное | |
| Свободное падение — (равномерно-ускоренное) | |
Вращательное | |
Обозначения: аt — угловой путь, пройденный радиусом r за время t, рад; t — время, с; ωt — угловая скорость, 1/с; ε — угловое ускорение, 1/с2; n — частота вращения, мин-1; v — линейная скорость на радиусе r, м/с; ω0 — начальная угловая скорость, 1/с | |
| равномерное | |
| равномерно-ускоренное (v0 = 0) | |
| равномерно-ускоренное (v0 | |
| равномерно-замедленное | |
Таблица 3. Расчет сил простейших механизмов (без учета трения)
Расчет сил простейших механизмов (без учета трения)
Рычаги и блоки | |||
| Эскизы | Механизмы | Формулы | |
| Силы | Перемещения | ||
| 1 | Рычаг первого рода | ||
| 2, 3 | Рычаг второго рода | ||
| 4 | Ворот | ||
| 5 | Блоки | ||
| 6 | |||
| 7 | |||
Таблица 4. Расчет сил простейших механизмов (без учета трения)
| Винтовые и клиновые механизмы | |||
| Эскизы | Формулы | Эскизы | Формулы |
| 1 | 4 | ||
| 2 | 5 | ||
| 3 | 6 | ||
Таблица 5.
| Схема нагружения | Реакции опор Изгибающий момент | Допускаемая нагрузка | Максимальный прогиб | Опасное сечение |
| А | ||||
| А | ||||
| — | А | |||
| C | ||||
| C | ||||
| C | ||||
| А | ||||
| B | ||||
| А,B,C | ||||
| А,B,C | ||||
| Все сечения | ||||
| D |
Просмотров: 102
Основные формулы релятивистской 📙 механики
- Принцип относительности в релятивистской механике
- Релятивистский импульс
- Масса и энергия в релятивистской механике
Определение 1
Релятивистская механика является разделом физики, который рассматривает законы механики при скоростях, сопоставляемых максимально близко со скоростью света.
Рисунок 1. Релятивистская механика материальной точки.
На скоростях, которые максимально близки к скорости света, с материальными объектами осуществляются внезапные и чудесные явления. Это, к примеру, замедление временных промежутков и релятивистское уменьшение длины. В границах изучения релятивистской механики изменяются определения определённых сложившихся в физике классических материальных значений.
Это уравнение, которое фактически знают все, отражает, что масса считается в полной мере мерилом энергии объекта, в том числе, представляет основную возможность перехода внутренней энергии объекта в энергию излучения. Ключевой закон релятивистской механики по типу материальной точки описывается таким же образом, как и второй закон Ньютона:
\(F = {dp\over dT}\)
Рисунок 2. Положения теории относительности Эйнштейна.
Теория относительности Эйнштейна предполагает независимость всех имеющихся природных законов относительно постепенного перехода от одной инерциальной системы отсчёта к иной. Это значит, что все объясняющие законы природы уравнения обязаны в полной мере быть инвариантны по отношению к преобразованиям Лоренца.
Это значит, что все объясняющие законы природы уравнения обязаны в полной мере быть инвариантны по отношению к преобразованиям Лоренца.
На момент появления специальной теории относительности теоретические основы, которые удовлетворяли бы этому требованию, уже описывались традиционной электродинамикой шотландским физиком, математиком и механиком Джеймсом Клерком Максвеллом. Но все формулы классической механики Ньютона стали совершенно неинвариантными по отношению к иным научным положениям. И по данной причине, специальная теория относительности запросила модификацию и конкретизацию механических обоснованностей.
В основание данного важнейшего пересмотра Альберт Эйнштейн огласил потребность осуществимости закона сбережения импульса и внутренней энергии, находящихся в замкнутых структурах. С целью выполнения принципа специальной теории относительности во всех инерциальных системах отсчёта, стало очень необходимым и первоочередным изменение формулировки самого импульса материального объекта.
Если воспринять и применить данную формулировку, тогда закон сбережения конечного импульса активных элементов, которые взаимодействуют (к примеру, при неожиданных ударениях) начнёт исполняться во всех инерциальных структурах, напрямую взаимосвязанных преобразованиями Лоренца. При \(β→0\), релятивистский внутренний импульс невольно осуществляет переход в традиционный.
Масса m, которая входит в ключевое уравнение для импульса, считается основным свойством элементарных частиц, и не зависит от последующего выбора системы отсчёта. Следовательно, она не зависит от коэффициента её перемещения.
Рисунок 3. Релятивистский импульс.
Релятивистский импульс не является пропорциональным первоначальной скорости частицы. И преобразования данного импульса находятся вне зависимости от вероятного увеличения скорости элементов, которые осуществляют коммуникации в инерциальной структуре отсчёта. По данной причине, устойчивая по ориентиру и модулю сила не приводит к прямолинейному перемещению, которое совершается с равномерно возрастающим ускорением. 2}){3\over2}\)
2}){3\over2}\)
Когда скорость определённой традиционной элементарной частицы бесконечно возрастает под воздействием постоянной силы, тогда скорость релятивистского объекта не сможет в результате превзойти скорость света в вакууме. В релятивистской механике, в равной степени, как и в ньютоновских законах, осуществляется и действует закон сбережения энергии.
Кинетическая энергия физического объекта Ek вычисляется чрез внешнюю работу силы, которая необходима для передачи в последующем данной скорости. Для разгона элементарной частицы, которая обладает массой m, из состояния равновесия до скорости под воздействием стабильного показателя \(F\), данная сила должна осуществить работу.
Довольно значительный и необходимый итог открытий в релятивистской механике заключается в том, что располагающаяся в стабильном покое масса m обладает чрезвычайно большим резервом энергии. Данное высказывание обладает разными использованиями на практике, охватывая область ядерной энергетики. Когда масса какой-либо материальной структуры снизилась в некоторое количество раз, тогда в данное время обязана выделиться энергия, которая вычисляется по формуле: \(ΔE=Δm•c2. 2}\)
2}\)
Световая скорость постоянно считается пограничной величиной. Более быстро, нежели свет в принципе не обладает возможностью перемещения ни один материальный объект на Земле. Множество целей и проблемных вопросов получилось бы разрешить человеческому обществу, если бы у учёных получилось создать многофункциональное устройство, которое способно перемещаться со скоростью, приближенной к световой скорости. Пока что человечество имеет возможность исключительно мечтать о данной прелестной сказке. Однако в будущем полет в космическое пространство либо на иные планеты с релятивистской скоростью будет не чудом, а осуществимой действительностью.
Все формулы – Справочник – 2022
Все формулы с физики
Привет! В мире физики существует множество формул и вариантов их использования. Естественно, все в голове удержать невозможно — это и понятно, гораздо важнее понимать, что они означают. Справиться с первой проблемой мы поможем — для того и был создан наш сайт, где собраны все формулы по физике, а вторую каждый должен осилить сам.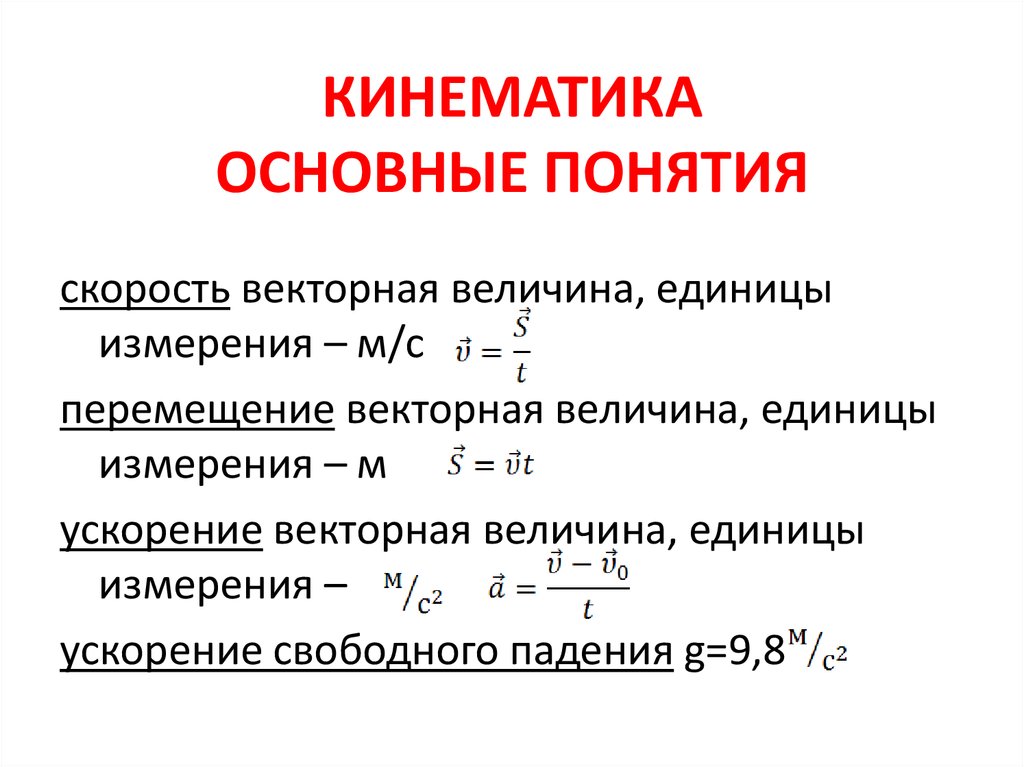
Итак, все формулы по физике собраны здесь. Над разделом с формулами по математике мы еще работаем.
В сущности, теоретическая физика слишком трудна для физиков. — Давид Гильберт
Мы собрали все формулы без описаний в краткую шпаргалку, ее ты увидишь ниже. Формулы с объяснениями ищи в соответствующих разделах сайта! Удачи!
В сущности, теоретическая физика слишком трудна для физиков. — Давид Гильберт
Справиться с первой проблемой мы поможем для того и был создан наш сайт, где собраны все формулы по физике, а вторую каждый должен осилить сам.
Xn—b1agsdjmeuf9e. xn--p1ai
11.10.2018 4:47:48
2018-10-11 04:47:48
Источники:
Http://xn--b1agsdjmeuf9e. xn--p1ai/
50 формул по физике за 7-11 класс с пояснением » /> » /> .keyword { color: red; }
Все формулы с физики
Мы собрали основные формулы по физике с пояснениями в картинках. Более пятидесяти формул, разделенные по категориям физики: кинетика, динамика, статика, молекулярка, термодинамика, электричество, магнетизм, оптика, кинетика. Это не статья, а огромная шпаргалка по физике!
Более пятидесяти формул, разделенные по категориям физики: кинетика, динамика, статика, молекулярка, термодинамика, электричество, магнетизм, оптика, кинетика. Это не статья, а огромная шпаргалка по физике!
Более 50 основных формул по физике с пояснением обновлено: 22 ноября, 2019 автором: Научные Статьи. Ру
Основные формулы по физике: кинематика, динамика, статика
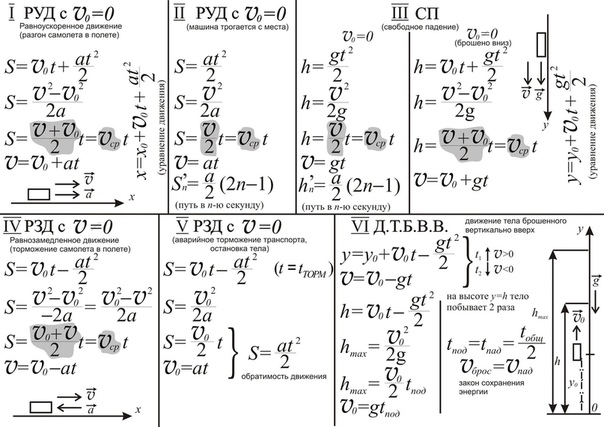
Итак, как говорится, от элементарного к сложному. Начнём с кинетических формул:
Также давайте вспомним движение по кругу:
Медленно, но уверенно мы перешли более сложной теме – к динамике:
Уже после динамики можно перейти к статике, то есть к условиям равновесия тел относительно оси вращения:
После статики можно рассмотреть и гидростатику:
Куда же без темы “Работа, энергия и мощность”. Именно по ней даются много интересных, но сложных задач. Поэтому без формул здесь не обойтись:
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов).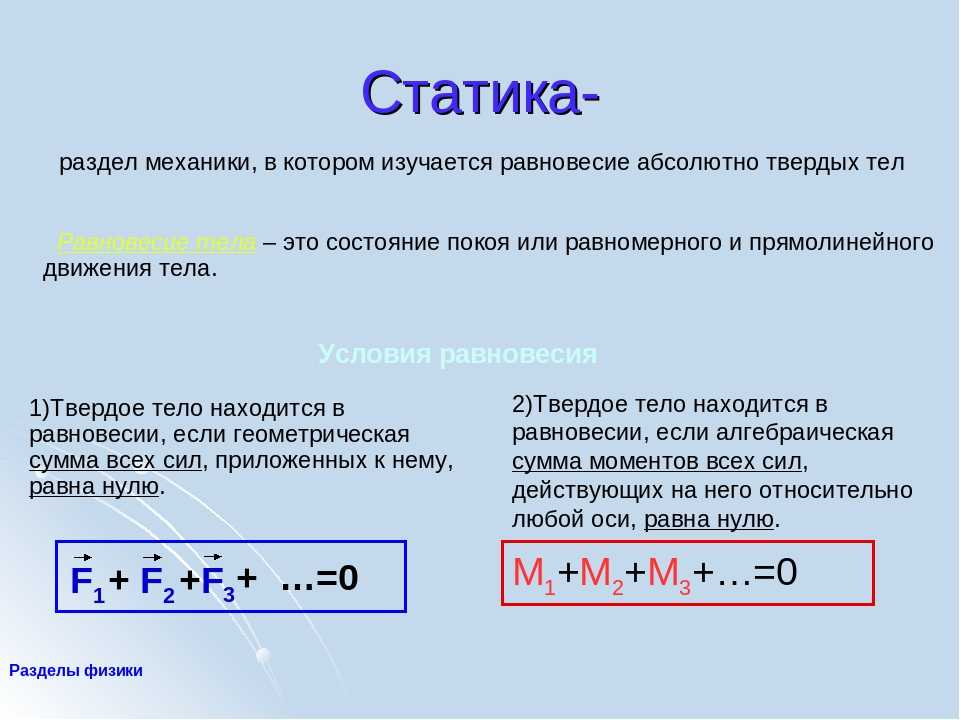 Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим Бесплатно.
Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим Бесплатно.
Основные формулы термодинамики и молекулярной физики
Последняя тема в механике – это “Колебания и волны”:
Теперь можно смело переходить к молекулярной физике:
Плавно переходим в категорию, которая изучает общие свойства макроскопических систем. Это термодинамика:
Основные формулы электричества
Для многих студентов тема про электричество сложнее, чем про термодинамика, но она не менее важна. Итак, начнём с электростатики:
Переходим к постоянному электрическому току:
Далее добавляем формулы по теме: “Магнитное поле электрического тока”
Электромагнитная индукция тоже важная тема для знания и понимания физики. Конечно, формулы по этой теме необходимы:
Ну и, конечно, куда же без электромагнитных колебаний:
Основные формулы оптической физики
Переходим к следующему разделу по физике – оптика.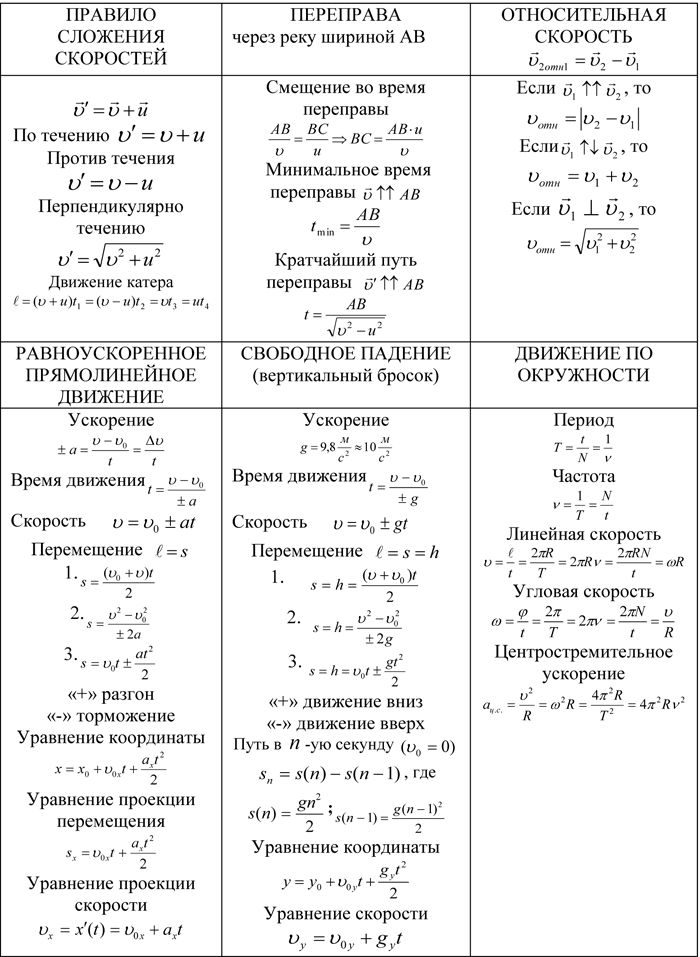 Здесь даны 8 основных формул, которые необходимо знать. Будьте уверены, задачи по оптике – частое явление:
Здесь даны 8 основных формул, которые необходимо знать. Будьте уверены, задачи по оптике – частое явление:
Основные формулы элементов теории относительности
И последнее, что нужно знать перед экзаменом. Задачи по этой теме попадаются реже, чем предыдущие, но бывают:
Основные формулы световых квантов
Этими формулами приходится часто пользоваться в силу того, что на тему “Световые кванты” попадается немало задач. Итак, рассмотрим их:
На этом можно заканчивать. Конечно, по физике есть ещё огромное количество формул, но они вам не столь не нужны.
Это были основные формулы физики
В статье мы подготовили 50 формул, которые понадобятся на экзамене в 99 случая из 100.
Совет: распечатайте все формулы и возьмите их с собой. Во время печати, вы так или иначе будете смотреть на формулы, запоминая их. К тому же, с основными формулами по физике в кармане, вы будете чувствовать себя на экзамене намного увереннее, чем без них.

Надеемся, что подборка формул вам понравилась!
P. S. Хватило ли вам 50 формул по физике, или статью нужно дополнить? Пишите в комментариях.
Более 50 основных формул по физике с пояснением обновлено: 22 ноября, 2019 автором: Научные Статьи. Ру
Совет: распечатайте все формулы и возьмите их с собой. Во время печати, вы так или иначе будете смотреть на формулы, запоминая их. К тому же, с основными формулами по физике в кармане, вы будете чувствовать себя на экзамене намного увереннее, чем без них.
Пишите в комментариях.
Nauchniestati. ru
18.12.2020 1:16:28
2020-12-18 01:16:28
Источники:
Https://nauchniestati. ru/spravka/bolee-50-osnovnyh-formul-po-fizike/
Все формулы по физике за 7 класс с пояснениями — таблица и шпаргалки » /> » /> .keyword { color: red; }
Все формулы с физики
Готовясь к экзаменам, удобно иметь под рукой шпаргалку, где будет кратко изложено самое важное. В этом материале мы объединили все основные формулы по физике за 7 класс с пояснениями и терминами. Их можно скачать на свой компьютер, чтобы всегда иметь под рукой.
В этом материале мы объединили все основные формулы по физике за 7 класс с пояснениями и терминами. Их можно скачать на свой компьютер, чтобы всегда иметь под рукой.
Шпаргалки по физике за 7 класс
В рамках одной статьи сложно охватить весь курс по физике, но мы осветили основные темы за 7 класс и этого достаточно, чтобы освежить знания в памяти. Скачайте и распечатайте обе шпаргалки — одна из них (подробная) пригодится для вдумчивой подготовки к ОГЭ и ЕГЭ, а вторая (краткая) послужит для решения задач.
Для тех, кто находится на домашнем обучении или вынужден самостоятельно изучать материал ввиду пропусков по болезни, рекомендуем также учебник по физике А. В. Перышкина с формулами за 7 класс и легкими, доступными пояснениями по всем темам. Он был написан несколько десятилетий назад, но до сих пор очень популярен и востребован.
Измерение физических величин
Измерением называют определение с помощью инструментов и технических средств числового значения физической величины.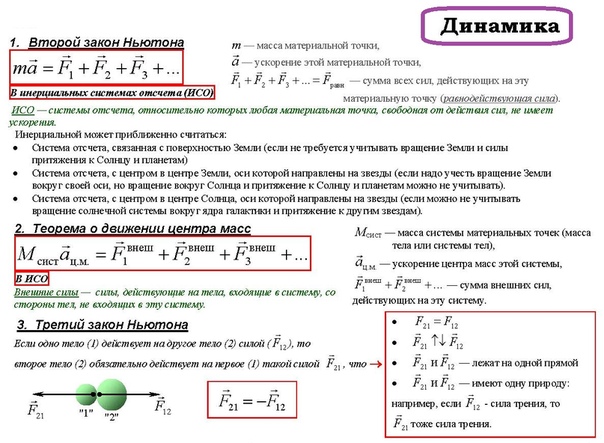
Результат измерения сравнивают с неким эталоном, принятым за единицу. В итоге Значением физической величины считается полученное число с указанием единиц измерения.
В курсе по физике за 7 класс изучают правила измерений с использованием приборов со шкалой. Если цена деления шкалы неизвестна, узнать ее можно с помощью следующей формулы:
ЦД = (max − min) / n, где ЦД — цена деления, max — максимальное значение шкалы, min — минимальное значение шкалы, n — количество делений между ними.
Вместо максимального и минимального можно взять любые другие значения шкалы, числовое выражение которых нам известно.
Выделяют прямое и косвенное измерение:
При прямом измерении результат можно увидеть непосредственно на шкале инструмента;
При косвенном измерении значение величины вычисляется через другую величину (например, среднюю скорость определяют на основе нескольких замеров скорости).
Для удобства и стандартизации измерений в 1963 году была принята Международная система единиц СИ. Она регламентирует, какие единицы измерения считать основными и использовать для формул. Обозначения этих единиц также учат в программе по физике за 7 класс.
Она регламентирует, какие единицы измерения считать основными и использовать для формул. Обозначения этих единиц также учат в программе по физике за 7 класс.
Механическое движение: формулы за 7 класс
Механическое движение — перемещение тела в пространстве, в результате которого оно меняет свое положение относительно других тел. Закономерности такого движения изучают в рамках механики и конкретно ее раздела — кинематики.
Для того, чтобы описать движение, требуется тело отсчета, система координат, а также инструмент для измерения времени. Это составляющие системы отсчета.
Изучение механического движения в курсе по физике за 7 класс включает следующие термины:
Перемещение тела — минимальное расстояние, которое соединяет две выбранные точки траектории движения.
Траектория движения — мысленная линия, вдоль которой перемещается тело.
Путь — длина траектории тела от начальной до конечной точки.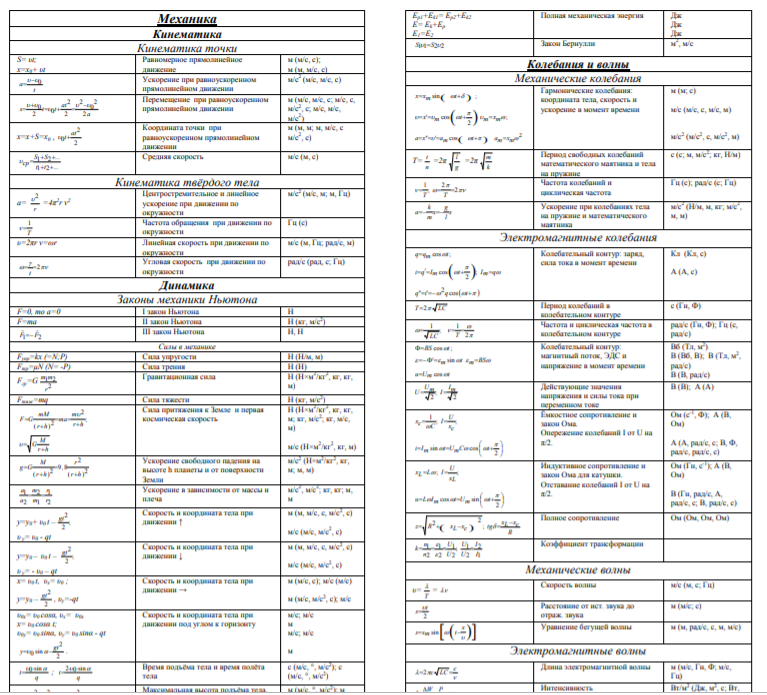
Скорость — быстрота перемещения тела или отношение пройденного им пути ко времени прохождения.
Ускорение — быстрота изменения скорости, с которой движется тело.
Равномерное движение — механическое движение, при котором тело за любые равные промежутки времени проходит одно и то же расстояние.
Формула скорости равномерного прямолинейного движения:
V = S / t, где S — путь тела, t — время, за которое этот путь пройден.
Формула скорости равномерного криволинейного движения:
Где S1 и S2 — отрезки пути, а t1 и t2 — время, за которое был пройден каждый из них.
Единица измерения скорости в СИ: метр в секунду (м/с).
Формула скорости равноускоренного движения:
V = V0 + at, где V0— начальная скорость, а — ускорение.
Единица измерения ускорения в СИ: м/с 2 .
Сила тяжести, вес, масса, плотность
Формулы, понятия и определения, описывающие эти физические характеристики, изучают в 7 классе в рамках такого раздела физики, как динамика.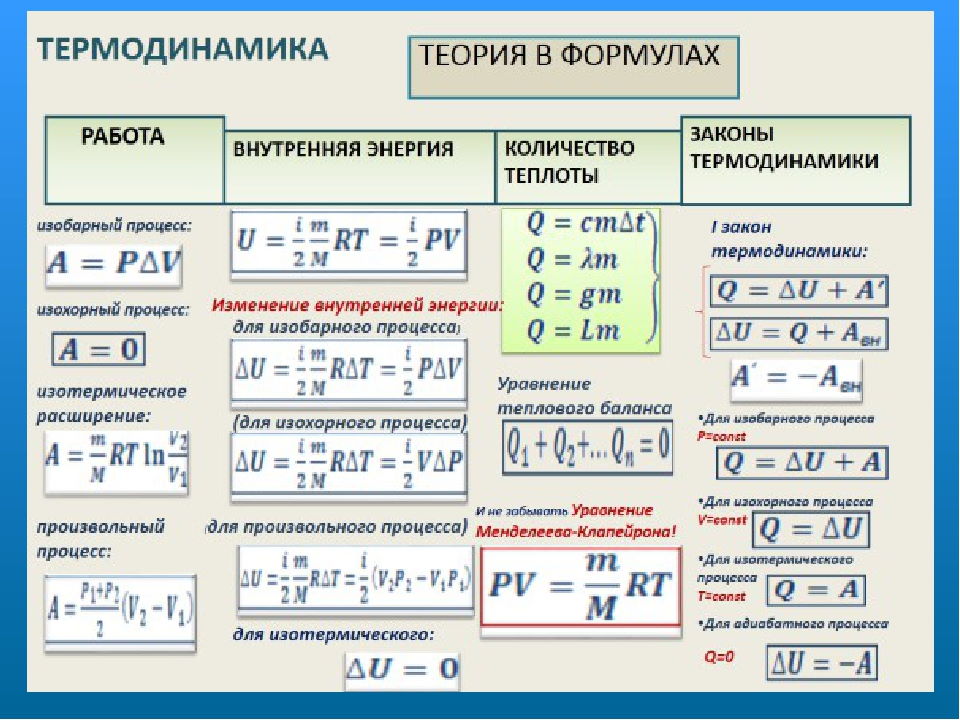
Вес тела или вещества — это физическая величина, которая характеризует, с какой силой оно действует на горизонтальную поверхность или вертикальный подвес.
Обратите внимание: вес тела измеряется в ньютонах, масса тела — в граммах и килограммах.
Формула веса:
P = mg, где m — масса тела, g — ускорение свободного падения.
Ускорение свободного падения возникает под действием силы тяжести, которой подвержены все находящиеся на нашей планете тела.
G = 9,806 65 м/с 2 или 9,8 Н/кг
Если тело находится в покое или в прямолинейном равномерном движении, его вес равен силе тяжести.
Но эти понятия нельзя отождествлять: сила тяжести действует на тело ввиду наличия гравитации, в то время как вес — это сила, с которой само тело действует на поверхность.
Плотность тела или вещества — величина, указывающая на то, какую массу имеет данное вещество, занимая единицу объема. Плотность прямо пропорциональна массе и обратно пропорциональна объему.
Формула плотности:
Ρ = m / V, где m — масса тела или вещества, V — занимаемый объем.
Единица измерения плотности в СИ: кг/м 3 .
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Механический рычаг, момент силы
О механическом рычаге говорил еще Архимед, когда обещал перевернуть Землю, если только найдется подходящая точка опоры. Это простой механизм, который помогает поднимать грузы, закрепленные на одном его конце, прилагая силу к другому концу. При этом вес груза намного превосходит прилагаемое усилие. В 7 классе физические формулы, описывающие этот процесс, изучаются в том же разделе динамики.
Рычаг — это некое твердое тело, способное вращаться вокруг неподвижной точки опоры, на один конец которого действует сила, а на другом находится груз.
Перпендикуляр, проведенный от точки опоры до линии действия силы, называется Плечом силы.
Рычаг находится в равновесии, если произведение силы на плечо с одной его стороны равно произведению силы на плечо с другой стороны.
Уравнение равновесия рычага:
Из этого следует, что рычаг уравновешен, когда модули приложенных к его концам сил обратно пропорциональны плечам этих сил.
Момент силы — это физическая величина, равная произведению модуля силы F на ее плечо l.
M = F × l, где F — модуль силы, l — длина плеча.
Единица измерения момента силы в СИ: ньютон-метр (Н·м).
Эта формула верна, если сила приложена перпендикулярно оси рычага. Если же она прилагается под углом, такой случай выходит за рамки курса физики за 7 класс и подробно изучается в 9 классе.
Правило моментов: рычаг уравновешен, если сумма всех моментов сил, которые поворачивают его по часовой стрелке, равна сумме всех моментов сил, которые поворачивают его в обратном направлении.
Можно сказать иначе: рычаг в равновесии, если сумма моментов всех приложенных к нему сил относительно любой оси равна нулю.
Давление, сила давления
Прилагая одну и ту же силу к предмету, можно получить разный результат в зависимости от того, на какую площадь эта сила распределена. Объясняют этот феномен в программе 7 класса физические термины «давление» и «сила давления».
Объясняют этот феномен в программе 7 класса физические термины «давление» и «сила давления».
Давление — это величина, равная отношению силы, действующей на поверхность, к площади этой поверхности.
Сила давления направлена перпендикулярно поверхности.
Формула давления:
P = F / S, где F — модуль силы, S — площадь поверхности.
Единица измерения давления в СИ: паскаль (Па).
Понятно, что при одной и той же силе воздействия более высокое давление испытает та поверхность, площадь которой меньше.
Формулу для расчета силы давления вывести несложно:
В задачах по физике за 7 класс сила давления, как правило, равна весу тела.
Давление газов и жидкостей
Жидкости и газы, заполняющие сосуд, давят во всех направлениях: на стенки и дно сосуда. Это давление зависит от высоты столба данного вещества и от его плотности.
Формула гидростатического давления:
Р = ρ × g × h, где ρ — плотность вещества, g — ускорение свободного падения, h — высота столба.
Единица измерения давления жидкости или газа в СИ: паскаль (Па).
Однородная жидкость или газ давит на стенки сосуда равномерно, поскольку это давление создают хаотично движущиеся молекулы. И внешнее давление, оказываемое на вещество, тоже равномерно распределяется по всему его объему.
Закон Паскаля: давление, производимое на поверхность жидкого или газообразного вещества, одинаково передается в любую его точку независимо от направления.
Внешнее давление, оказываемое на жидкость или газ, рассчитывается по формуле:
P = F / S, где F — модуль силы, S — площадь поверхности.
Сообщающиеся сосуды
Сообщающимися называются Сосуды, которые имеют общее дно либо соединены трубкой. Уровень однородной жидкости в таких сосудах всегда одинаков, независимо от их формы и сечения.
P — плотность жидкости,
H — высота столба жидкости,
Если жидкость в сообщающихся сосудах неоднородна, т. е. имеет разную плотность, высота столба в сосуде с более плотной жидкостью будет пропорционально меньше.
Высоты столбов жидкостей с разной плотностью обратно пропорциональны плотностям.
Гидравлический пресс — это механизм, созданный на основе сообщающихся сосудов разных сечений, заполненных однородной жидкостью. Такое устройство позволяет получить выигрыш в силе для оказания статического давления на детали (сжатия, зажимания и т. д.).
Если под поршнем 1 образуется давление p1 = f1/s1, а под поршнем 2 будет давление p2 = f2/s2, то, согласно закону Паскаля, p1 = p2
Силы, действующие на поршни гидравлического пресса F1 и F2, прямо пропорциональны площадям этих поршней S1 и S2.
Другими словами, сила поршня 1 больше силы поршня 2 во столько раз, во сколько его площадь больше площади поршня 2. Это позволяет уравновесить в гидравлической машине с помощью малой силы многократно бóльшую силу.
Закон Архимеда
На тело, погруженное в жидкость или газ, действует выталкивающая сила, равная весу объема жидкости или газа, вытесненного частью тела, погруженной в жидкость или газ.
Формула архимедовой силы:
Fa = ρ × g × V, где ρ — плотность жидкости, V — объем погруженной части тела, g — ускорение 9,8 м/с 2 .
Закон Архимеда помогает рассчитать, как поведет себя тело при погружении в среды разной плотности. Верны следующие утверждения:
Если плотность тела выше плотности среды, оно уйдет на дно;
Если плотность тела ниже, оно всплывет на поверхность.
Другими словами, тело поднимется на поверхность, если архимедова сила больше силы тяжести.
Работа, энергия, мощность
Механическая работа — это физическая величина, которая равна произведению перемещения тела на модуль силы, под действием которой было выполнено перемещение.
Формула работы в курсе физики за 7 класс:
A = F × S, где F — действующая сила, S — пройденный телом путь.
Единица измерения работы в СИ: джоуль (Дж).
Такое понятие, как мощность, описывает скорость выполнения механической работы. Оно говорит о том, какая работа была совершена в единицу времени.
Оно говорит о том, какая работа была совершена в единицу времени.
Мощность — это физическая величина, равная отношению работы к временному промежутку, потребовавшемуся для ее выполнения.
Формула мощности:
N = A / t, где A — работа, t — время ее совершения.
Также мощность можно вычислить, зная силу, воздействующую на тело, и среднюю скорость перемещения этого тела.
N = F × v, где F — сила, v — средняя скорость тела.
Единица измерения мощности в СИ: ватт (Вт).
Тело может совершить какую-либо работу, если оно обладает энергией — кинетической и/или потенциальной.
Кинетической называют энергию движения тела. Она говорит о том, какую работу нужно совершить, чтобы придать телу определенную скорость.
Потенциальной называется энергия взаимодействия тела с другими телами или взаимодействия между частями одного целого. Потенциальная энергия тела, поднятого над Землей, характеризует, какую работу должна совершить сила тяжести, чтобы опустить это тело снова на нулевой уровень.
Таблица с формулами по физике за 7 класс для вычисления кинетической и потенциальной энергии:
Кинетическая энергия
Пропорциональна массе тела и квадрату его скорости.
Потенциальная энергия
Равна произведению массы тела, поднятого над Землей, на ускорение свободного падения и высоту поднимания.
Полная механическая энергия
Складывается из кинетической и потенциальной энергии.
Сохранение и превращение энергии
Если механическая энергия не переходит в другие формы, то сумма потенциальной энергии и кинетической представляет собой константу.
Для того, чтобы понять, какая часть совершенной работы была полезной, вычисляют коэффициент полезного действия или КПД. С его помощью определяется эффективность различных механизмов, инструментов и т. д.
Коэффициент полезного действия (КПД) отражает полезную часть выполненной работы. Также его можно выразить через отношение полезно использованной энергии к общему количеству полученной энергии.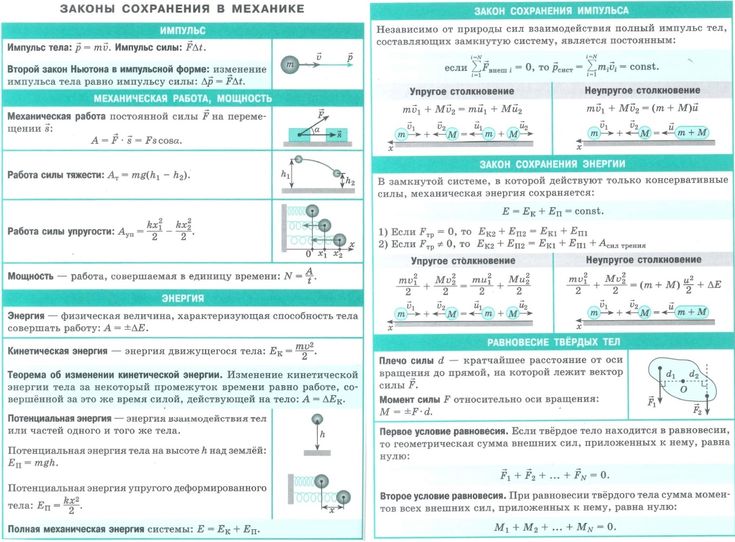
Формула для расчета КПД:
Где Ап— полезная работа, Аз— затраченная работа.
КПД выражается в процентах и составляет всегда меньше 100%, поскольку часть энергии затрачивается на трение, повышение температуры воздуха и окружающих тел, преодоление силы тяжести и т. д.
Уровень однородной жидкости в таких сосудах всегда одинаков, независимо от их формы и сечения.
Skysmart. ru
19.03.2018 5:11:01
2018-03-19 05:11:01
Источники:
Https://skysmart. ru/articles/physics/vse-formuly-za-7-klass-po-fizike
механика | Определение, примеры, законы и факты
векторная математика
Просмотреть все медиа
- Ключевые люди:
- Леонардо да Винчи Галилео Архимед Жан Ле Рон д’Аламбер Анри Пуанкаре
- Похожие темы:
- гидромеханика механика твердого тела квантовая механика небесная механика релятивистская механика
Просмотреть весь соответствующий контент →
Резюме
Прочтите краткий обзор этой темы
механика , наука о движении тел под действием сил, включая частный случай, когда тело остается в покое.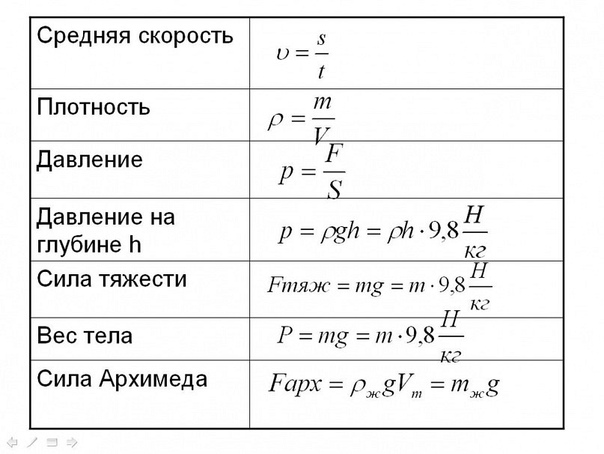 В первую очередь в проблеме движения речь идет о силах, с которыми тела действуют друг на друга. Это приводит к изучению таких тем, как гравитация, электричество и магнетизм, в зависимости от природы задействованных сил. Зная силы, можно искать способ движения тел под действием сил; это предмет собственно механики.
В первую очередь в проблеме движения речь идет о силах, с которыми тела действуют друг на друга. Это приводит к изучению таких тем, как гравитация, электричество и магнетизм, в зависимости от природы задействованных сил. Зная силы, можно искать способ движения тел под действием сил; это предмет собственно механики.
Исторически механика была одной из первых точных наук, получивших развитие. Ее внутренняя красота как математической дисциплины и ее первые замечательные успехи в количественном учете движения Луны, Земли и других планетных тел оказали огромное влияние на философскую мысль и дали толчок систематическому развитию науки.
Механика может быть разделена на три раздела: статика, изучающая силы, действующие на покоящееся тело и в нем; кинематика, описывающая возможные движения тела или системы тел; и кинетика, которая пытается объяснить или предсказать движение, которое произойдет в данной ситуации. В качестве альтернативы механику можно разделить в зависимости от типа изучаемой системы. Простейшей механической системой является частица, определяемая как тело настолько малое, что его форма и внутреннее строение не имеют значения в данной задаче. Более сложным является движение системы из двух или более частиц, которые взаимодействуют друг с другом и, возможно, испытывают силы тел вне системы.
Простейшей механической системой является частица, определяемая как тело настолько малое, что его форма и внутреннее строение не имеют значения в данной задаче. Более сложным является движение системы из двух или более частиц, которые взаимодействуют друг с другом и, возможно, испытывают силы тел вне системы.
Принципы механики были применены к трем основным сферам явлений. Движения таких небесных тел, как звезды, планеты и спутники, можно предсказать с большой точностью за тысячи лет до того, как они произойдут. (Теория относительности предсказывает некоторые отклонения от движения в соответствии с классической или ньютоновской механикой; однако они настолько малы, что их можно наблюдать только с помощью очень точных методов, за исключением задач, затрагивающих всю или большую часть обнаруживаемой Вселенной. ) Что касается второго царства, то обычные объекты на Земле вплоть до микроскопических размеров (движущиеся со скоростями намного ниже скорости света) должным образом описываются классической механикой без существенных поправок. Инженер, который проектирует мосты или самолеты, может с уверенностью использовать ньютоновские законы классической механики, даже если силы могут быть очень сложными, а расчетам не хватает прекрасной простоты небесной механики. Третья область явлений включает поведение материи и электромагнитного излучения в атомном и субатомном масштабе. Хотя были некоторые ограниченные первые успехи в описании поведения атомов с точки зрения классической механики, эти явления должным образом рассматриваются в квантовой механике.
Инженер, который проектирует мосты или самолеты, может с уверенностью использовать ньютоновские законы классической механики, даже если силы могут быть очень сложными, а расчетам не хватает прекрасной простоты небесной механики. Третья область явлений включает поведение материи и электромагнитного излучения в атомном и субатомном масштабе. Хотя были некоторые ограниченные первые успехи в описании поведения атомов с точки зрения классической механики, эти явления должным образом рассматриваются в квантовой механике.
Тест “Британника”
Физика и законы природы
Какая сила замедляет движение? Каждому действию есть равное и противоположное что? В этом викторине по физике нет ничего, что E = mc было бы квадратным.
Классическая механика имеет дело с движением тел под действием сил или с равновесием тел при уравновешивании всех сил. Субъект можно рассматривать как разработку и применение основных постулатов, впервые сформулированных Исааком Ньютоном в его Philosophiae Naturalis Principia Mathematica (1687), широко известный как Principia .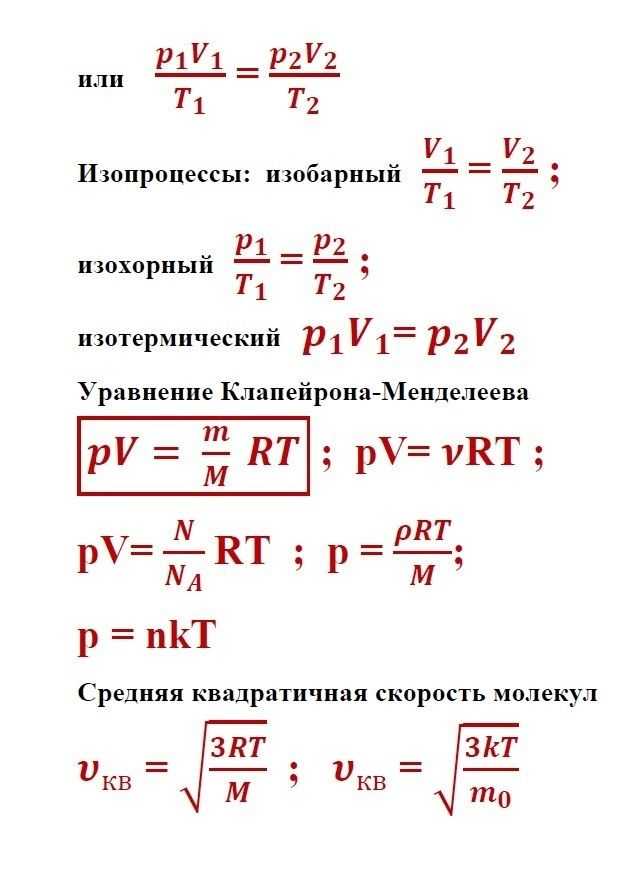 Эти постулаты, называемые законами движения Ньютона, изложены ниже. Их можно использовать для предсказания с большой точностью самых разных явлений, начиная от движения отдельных частиц и заканчивая взаимодействием очень сложных систем. Разнообразие этих приложений обсуждается в этой статье.
Эти постулаты, называемые законами движения Ньютона, изложены ниже. Их можно использовать для предсказания с большой точностью самых разных явлений, начиная от движения отдельных частиц и заканчивая взаимодействием очень сложных систем. Разнообразие этих приложений обсуждается в этой статье.
В рамках современной физики классическую механику можно понимать как приближение, вытекающее из более глубоких законов квантовой механики и теории относительности. Однако такой взгляд на место субъекта сильно недооценивает его важность в формировании контекста, языка и интуиции современной науки и ученых. Наше современное представление о мире и месте человека в нем прочно укоренено в классической механике. Более того, многие идеи и результаты классической механики сохранились и играют важную роль в новой физике.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Центральными понятиями классической механики являются сила, масса и движение. Ни сила, ни масса не определены Ньютоном очень четко, и со времен Ньютона они оба были предметом многочисленных философских рассуждений. Оба они наиболее известны своими эффектами. Масса является мерой тенденции тела сопротивляться изменениям в состоянии его движения. Силы, с другой стороны, ускоряют тела, то есть изменяют состояние движения тел, к которым они приложены. Взаимодействие этих эффектов составляет основную тему классической механики.
Ни сила, ни масса не определены Ньютоном очень четко, и со времен Ньютона они оба были предметом многочисленных философских рассуждений. Оба они наиболее известны своими эффектами. Масса является мерой тенденции тела сопротивляться изменениям в состоянии его движения. Силы, с другой стороны, ускоряют тела, то есть изменяют состояние движения тел, к которым они приложены. Взаимодействие этих эффектов составляет основную тему классической механики.
Хотя законы Ньютона фокусируют внимание на силе и массе, три другие величины приобретают особое значение, поскольку их общая сумма никогда не меняется. Этими тремя величинами являются энергия, (линейный) импульс и угловой момент. Любое из них может быть перенесено из одного тела или системы тел в другое. Кроме того, энергия может изменять форму, будучи связанной с одной системой, выступая в виде кинетической энергии, энергии движения; потенциальная энергия, энергия положения; теплота или внутренняя энергия, связанная со случайным движением атомов или молекул, составляющих любое реальное тело; или любая комбинация из трех.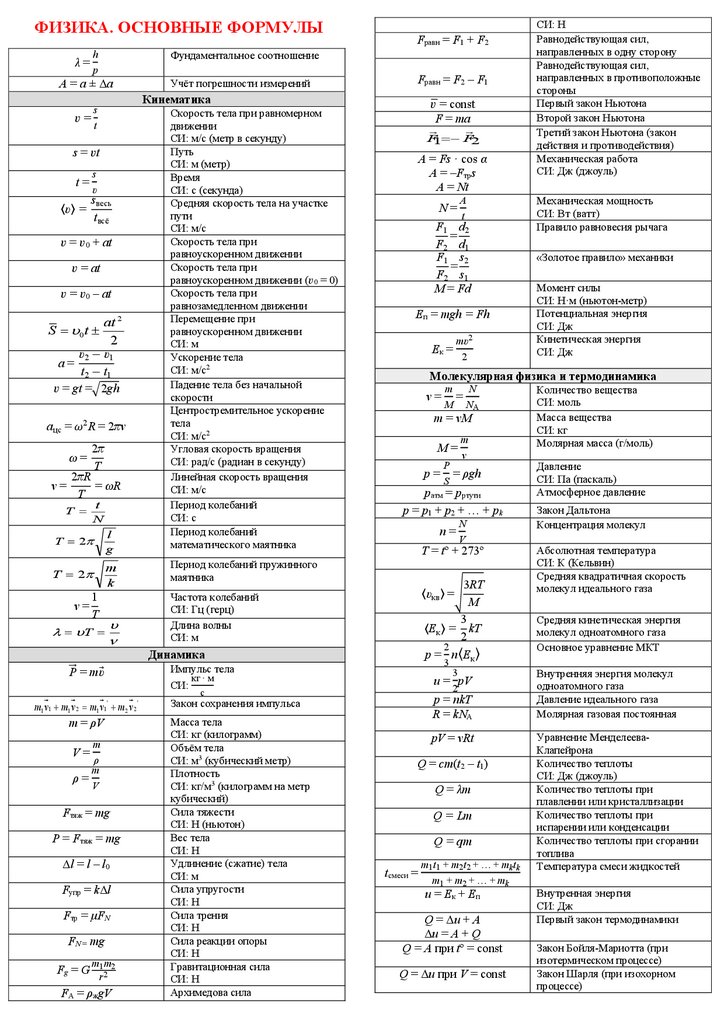 Тем не менее полная энергия, импульс и угловой момент во Вселенной никогда не меняются. Этот факт выражается в физике, говоря, что энергия, импульс и угловой момент сохраняются. Эти три закона сохранения вытекают из законов Ньютона, но сам Ньютон их не формулировал. Их пришлось обнаружить позже.
Тем не менее полная энергия, импульс и угловой момент во Вселенной никогда не меняются. Этот факт выражается в физике, говоря, что энергия, импульс и угловой момент сохраняются. Эти три закона сохранения вытекают из законов Ньютона, но сам Ньютон их не формулировал. Их пришлось обнаружить позже.
Примечателен тот факт, что, хотя законы Ньютона больше не считаются ни фундаментальными, ни даже абсолютно правильными, три закона сохранения, вытекающие из законов Ньютона, — сохранение энергии, импульса и углового момента — остаются в точности верными даже в квантовая механика и теория относительности. Фактически в современной физике сила перестала быть центральным понятием, а масса — лишь одним из ряда атрибутов материи. Однако энергия, импульс и угловой момент по-прежнему прочно занимают центральное место. Сохраняющееся значение этих идей, унаследованных от классической механики, может помочь объяснить, почему этот предмет сохраняет такое большое значение в науке сегодня.
Редакция Британской энциклопедии
Категория: Формулы и игровая механика | WoWWiki
в: Страницы, использующие повторяющиеся аргументы в вызовах шаблонов, Руководства, Боевые действия
Страница категории
Изменить эту страницу Пожалуйста, убедитесь, что формулы/информация, которую вы предоставляете, являются максимально правильными. Пожалуйста, не вносите чисто теоретические формулы/информацию. Если вы не уверены в данных, которые хотите предоставить, воспользуйтесь ссылкой на обсуждение, чтобы получить подтверждение перед публикацией на главной странице.
Пожалуйста, не вносите чисто теоретические формулы/информацию. Если вы не уверены в данных, которые хотите предоставить, воспользуйтесь ссылкой на обсуждение, чтобы получить подтверждение перед публикацией на главной странице.
Все виды сравнений (например, сколько +лечения эквивалентно 1 мане/5) должны идти в статью сравнения характеристик.
Популярные страницы
- Формулы: XP для уровня
- Хит
- Пункт арены
- Система боевого рейтинга
Все позиции (88)
- №
- А
- Б
- С
- Д
- Е
- Ф
- Г
- Н
- я
- Дж
- К
- Л
- М
- N
- О
- Р
- Вопрос
- Р
- S
- Т
- У
- В
- В
- Х
- Y
- Z
- Другое
А
- Агро
- Агро радиус
- Очки эквивалентности ловкости
- Категория:Союзные расы
- Ограничение урона по области
- Ограбление области действия
- Арена точка
- Бронепробиваемость
- Сила атаки
- Коэффициент силы атаки
- Скорость атаки
- Таблица атаки
- Атрибут
- Категория:Атрибуты
Б
- Блок
- Бонусная цель
- Лимит баффов
С
- Скорость литья
- Категория:Механика догона
- Шанс получить желанный дроп
- Буксировка персонажа
- Буксировка персонажа/Таблица опыта
- Бой
- Система боевого рейтинга
- Критический удар
Д
- Урон в секунду
- Снижение урона
- Рассеять
- Додж
- Двойное оружие
- Прочность
- Динамические награды за квест
Е
- Очки опыта
- Изучение
Ф
- Притвориться мертвым
- Дикая сила атаки
- Формулы:Аукционный дом
- Формулы: Соберите XP
- Формулы: как статистика влияет на Bear AC
- Формулы: Мгновенные атаки ближнего боя
- Формулы:Сопротивление магии
- Формулы: Моб ХР
- Формулы: XP до уровня
Н
- Сравнение исцеления
- Восстановление здоровья
- Нажмите
- Очки ловкости охотника
я
- Ледяные осколки (удален магический талант)
- Расширение блокировки экземпляра
- Уровень предмета
- Повышение уровня предмета
К
- Исследование Kenco по угрозе
л
- Масштабирование уровня
М
- Регенерация маны
- Мастерство
- Рейтинг матчмейкинга
- Убывающая отдача в ближнем бою
- Минимальный диапазон
- Цвета сложности мобов
- Эффекты скорости передвижения
Н
- Нормализация
Р
- Паладины как целители
- Репутация Идеала
- Парри
- Фазировка
- Яд в секунду
- Прок в минуту
Р
- Ярость
- Устойчивость
- Руины
С
- Событие по сценарию
- Стрела Тьмы против Испепеления
- Формулы Sinister Strike
- Заклинание критического удара
- Заклинание хит
- Приоритет результата заклинания
- Проникновение заклинаний
- Сила заклинаний
- Коэффициент силы заклинания
Т
- Точки заправки
- Теорикрафт
- Угроза
- Отслеживаемый
У
- Недробимость
- Блок (РТС)
В
- Транспортные средства (механик)
Вт
- Навык владения оружием
- Категория: Теория World of Warcraft
Контент сообщества доступен по лицензии CC-BY-SA, если не указано иное.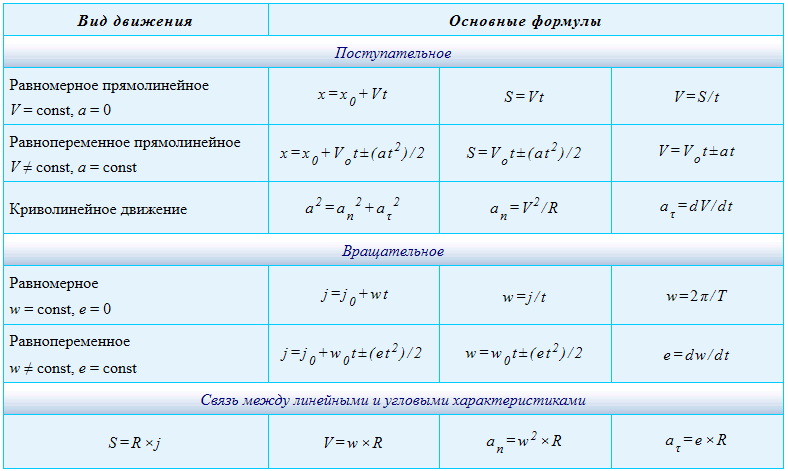
404 – СТРАНИЦА НЕ НАЙДЕНА
Почему я вижу эту страницу?
404 означает, что файл не найден. Если вы уже загрузили файл, имя может быть написано с ошибкой или файл находится в другой папке.
Другие возможные причиныВы можете получить ошибку 404 для изображений, поскольку у вас включена защита от горячих ссылок, а домен отсутствует в списке авторизованных доменов.
Если вы перейдете по временному URL-адресу (http://ip/~username/) и получите эту ошибку, возможно, проблема связана с набором правил, хранящимся в файле .htaccess. Вы можете попробовать переименовать этот файл в .htaccess-backup и обновить сайт, чтобы посмотреть, решит ли это проблему.
Также возможно, что вы непреднамеренно удалили корневую папку документа или вам может потребоваться повторное создание вашей учетной записи. В любом случае, пожалуйста, немедленно свяжитесь с вашим веб-хостингом.
Вы используете WordPress? См. Раздел об ошибках 404 после перехода по ссылке в WordPress.
Как найти правильное написание и папку
Отсутствующие или поврежденные файлыКогда вы получаете ошибку 404, обязательно проверьте URL-адрес, который вы пытаетесь использовать в своем браузере. Это сообщает серверу, какой ресурс он должен использовать попытка запроса.
http://example.com/example/Example/help.html
В этом примере файл должен находиться в папке public_html/example/Example/
Обратите внимание, что в этом примере важен CaSe . На платформах с учетом регистра e xample и E xample не совпадают.
Для дополнительных доменов файл должен находиться в папке public_html/addondomain.com/example/Example/, а имена чувствительны к регистру.
Неработающее изображение Если на вашем сайте отсутствует изображение, вы можете увидеть на своей странице поле с красным размером X , где отсутствует изображение. Щелкните правой кнопкой мыши на X и выберите «Свойства». Свойства сообщат вам путь и имя файла, который не может быть найден.
Щелкните правой кнопкой мыши на X и выберите «Свойства». Свойства сообщат вам путь и имя файла, который не может быть найден.
Это зависит от браузера. Если вы не видите на своей странице поле с красным X , попробуйте щелкнуть правой кнопкой мыши страницу, затем выберите «Просмотр информации о странице» и перейдите на вкладку «Мультимедиа».
http://example.com/cgi-sys/images/banner.PNG
В этом примере файл изображения должен находиться в папке public_html/cgi-sys/images/ пример. На платформах, которые обеспечивают чувствительность к регистру PNG и png — это разные местоположения.
404 Ошибки после перехода по ссылкам WordPress
При работе с WordPress ошибки 404 Page Not Found часто могут возникать, когда была активирована новая тема или когда были изменены правила перезаписи в файле .htaccess.
Когда вы сталкиваетесь с ошибкой 404 в WordPress, у вас есть два варианта ее исправления.
- Войдите в WordPress.
- В меню навигации слева в WordPress нажмите Настройки > Постоянные ссылки (Обратите внимание на текущую настройку. Если вы используете пользовательскую структуру, скопируйте или сохраните ее где-нибудь.)
- Выберите По умолчанию .
- Нажмите Сохранить настройки .
- Верните настройки к предыдущей конфигурации (до того, как вы выбрали «По умолчанию»). Верните пользовательскую структуру, если она у вас была.
- Нажмите Сохранить настройки .
Во многих случаях это приведет к сбросу постоянных ссылок и устранению проблемы. Если это не сработает, вам может потребоваться отредактировать файл .htaccess напрямую.
Вариант 2. Измените файл .htaccessДобавьте следующий фрагмент кода в начало файла .htaccess:
# НАЧАЛО WordPress
 c>
c>
RewriteEngine On
RewriteBase / 9index.php$ – [L]
RewriteCond %{REQUEST_FILENAME} !-f
RewriteCond %{REQUEST_FILENAME} !-d
RewriteRule . /index.php [L]
# Конец WordPress
Если ваш блог показывает неправильное доменное имя в ссылках, перенаправляет на другой сайт или отсутствуют изображения и стиль, все это обычно связано с одной и той же проблемой: в вашем блоге WordPress настроено неправильное доменное имя.
Как изменить файл .htaccess
Файл .htaccess содержит директивы (инструкции), которые сообщают серверу, как вести себя в определенных сценариях, и напрямую влияют на работу вашего веб-сайта.
Перенаправление и перезапись URL-адресов — это две очень распространенные директивы, которые можно найти в файле .htaccess, и многие скрипты, такие как WordPress, Drupal, Joomla и Magento, добавляют директивы в .htaccess, чтобы эти скрипты могли работать.
Возможно, вам потребуется отредактировать файл .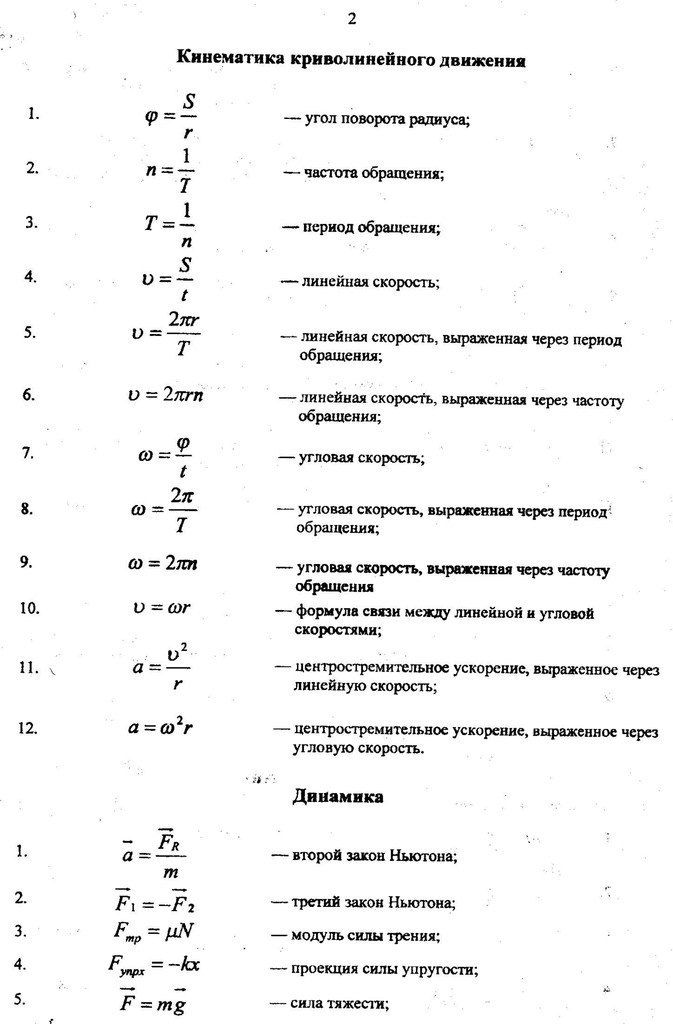 htaccess в какой-то момент по разным причинам. В этом разделе рассказывается, как редактировать файл в cPanel, но не о том, что нужно изменить. статьи и ресурсы для этой информации.)
htaccess в какой-то момент по разным причинам. В этом разделе рассказывается, как редактировать файл в cPanel, но не о том, что нужно изменить. статьи и ресурсы для этой информации.)
- Отредактируйте файл на своем компьютере и загрузите его на сервер через FTP
- Использовать режим редактирования программы FTP
- Используйте SSH и текстовый редактор
- Используйте файловый менеджер в cPanel
Самый простой способ отредактировать файл .htaccess для большинства людей — через диспетчер файлов в cPanel.
Как редактировать файлы .htaccess в файловом менеджере cPanelПрежде чем что-либо делать, рекомендуется сделать резервную копию вашего веб-сайта, чтобы вы могли вернуться к предыдущей версии, если что-то пойдет не так.
Откройте файловый менеджер- Войдите в cPanel.
- В разделе «Файлы» щелкните значок «Диспетчер файлов ».
- Установите флажок для Корень документа для и выберите доменное имя, к которому вы хотите получить доступ, из раскрывающегося меню.
- Убедитесь, что установлен флажок Показать скрытые файлы (точечные файлы) “.
- Нажмите Перейти . Файловый менеджер откроется в новой вкладке или окне.
- Найдите файл .htaccess в списке файлов. Возможно, вам придется прокрутить, чтобы найти его.
- Щелкните правой кнопкой мыши файл .htaccess и выберите Редактировать код в меню. Кроме того, вы можете щелкнуть значок файла .htaccess, а затем Редактор кода Значок вверху страницы.
- Может появиться диалоговое окно с вопросом о кодировании. Просто нажмите Изменить , чтобы продолжить. Редактор откроется в новом окне.
- При необходимости отредактируйте файл.