
Аналитическая динамика
Аналитическая динамика
ОглавлениеИЗ ПРЕДИСЛОВИЯ АВТОРАГлава I. ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ § 1.1. Свободная материальная точка. § 1.2. Прямолинейное движение материальной точки в силовом поле. § 1.3. Либрационное движение. § 1.4. Заданная сила не может быть функцией от ускорения. § 1.5. Несвободная материальная точка (случай I). § 1.6. Несвободная материальная точка (случай II). § 1.7. Несвободная материальная точка (случай III). § 1.8. Голономные и неголономные системы. § 2.1. Система двух материальных точек. § 2.2. Система материальных точек. § 2.3. Катастатическая система. § 2.4. Реакции связей. § 2.5. К понятию о механической системе. Глава III. ПЕРВАЯ ФОРМА ОСНОВНОГО УРАВНЕНИЯ § 3.2. Сохранение импульса. § 3.3. Катастатическая система и первая форма уравнения энергии. § 3.4. Консервативные силы и вторая форма уравнения энергии.  § 3.5. Третья форма уравнения энергии. § 3.6. Сохранение энергии. § 3.7. Принцип Гамильтона. § 3.8. Варьированный путь. § 3.9. Распределенные системы. § 4.1. Вторая форма основного уравнения. § 4.2. Третья форма основного уравнения. § 4.3. Принцип Гаусса наименьшего принуждения. § 4.4. Приложения принципа Гаусса. § 4.5. Физический смысл принципа Гаусса. Глава V. ЛАГРАНЖЕВЫ КООРДИНАТЫ § 5.2. Некоторые классические задачи. § 5.3. Сферический маятник. § 5.4. Задача двух тел. § 5.5. Уравнение Кеплера. § 5.6. Столкновение. § 5.7. Лагранжевы координаты для голономной системы. § 5.8. Лагранжевы координаты для неголономной системы. § 5.9. Качение тела. § 5.10. Достижимость. § 5.11. Варьированный путь в принципе Гамильтона. Глава VI. УРАВНЕНИЯ ЛАГРАНЖА § 6.1. Четвертая форма основного уравнения. Лагранжевы координаты. 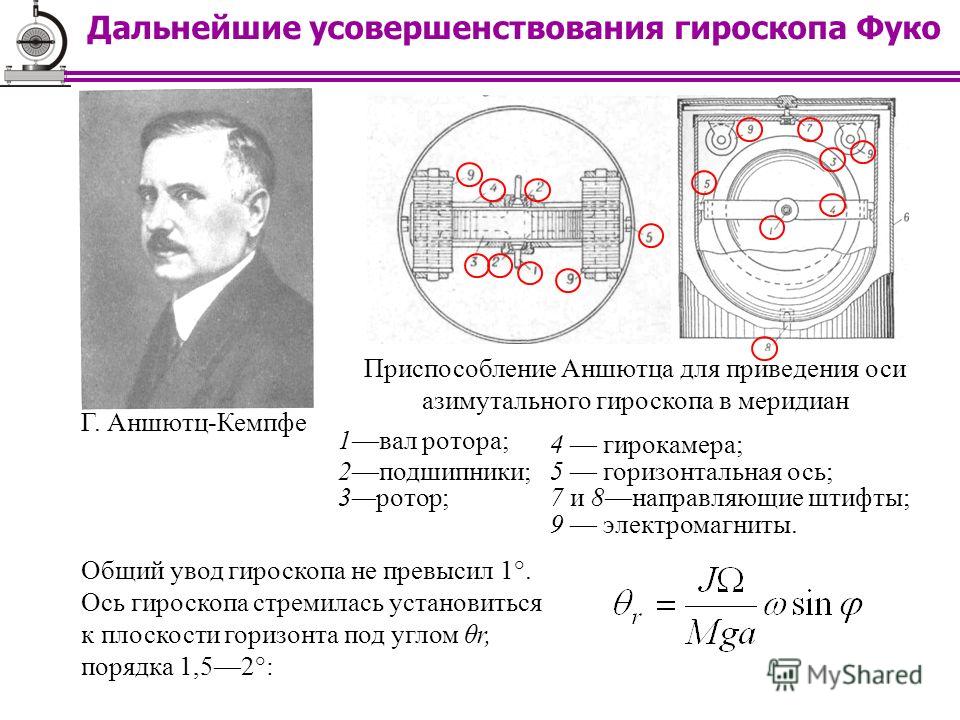 § 6.2. Уравнения Лагранжа. § 6.3. Вывод уравнений Лагранжа из принципа Гамильтона. § 6.4. Форма уравнений Лагранжа. § 6.5. Консервативные системы и другие системы, обладающие потенциальной функцией. § 6.6. Функция Лагранжа. § 6.7. Интеграл Якоби. § 6.8. Явная форма интеграла Якоби. § 6.9. Об одной ошибке. § 6.11. Циклические координаты. § 6.12. Инвариантность уравнений Лагранжа. Глава VII. ТЕОРИЯ ПОВОРОТОВ § 7.3. Матрица l и вектор Т. § 7.4. Обобщение теоремы Эйлера. § 7.5. Теорема Шаля. § 7.6. Формула поворота. § 7.7. Полуобороты и отражения. § 7.8. Кватернионная форма записи формулы поворота. § 7.9. Сложение вращений. § 7.10. Угловая скорость. § 7.11. Ориентация твердого тела в пространстве. Углы Эйлера. § 7.12. Ориентация твердого тела в пространстве. Углы … § 7.13. Повороты около движущихся осей. § 7.14. Повороты около неподвижных осей. § 7.15. Определение угловой скорости с помощью матриц § 7.  16. Составляющие вектора угловой скорости. 16. Составляющие вектора угловой скорости.Глава VIII. ПРИЛОЖЕНИЯ УРАВНЕНИЙ ЛАГРАНЖА § 8.2. Формулы ускорения в ортогональных координатах. § 8.3. Обезьяна и противовес. § 8.4. Кинетическая энергия твердого тела. § 8.5. Задача о движении в двух измерениях. § 8.6. Вращающийся волчок; основные уравнения. § 8.7. Вращающийся волчок; другое решение. § 8.8. Гироскопические силы. § 8.9. Вращающийся волчок; исследование движения. § 8.10. Численный пример. § 8.11. Стержень во вращающейся плоскости. § 8.12. Качение диска. Глава IX. ТЕОРИЯ КОЛЕБАНИЙ § 9.1. Колебания около положения равновесия. § 9.2. Теория преобразования к главным координатам. § 9.3. Приложение теории. § 9.4. Наложение связи. § 9.6. Устойчивость установившегося движения. § 9.7. Колебания в окрестности установившегося движения. § 9.8. Гироскоп Фуко. § 9.9. Спящий волчок. § 9.10. Вынужденные колебания. 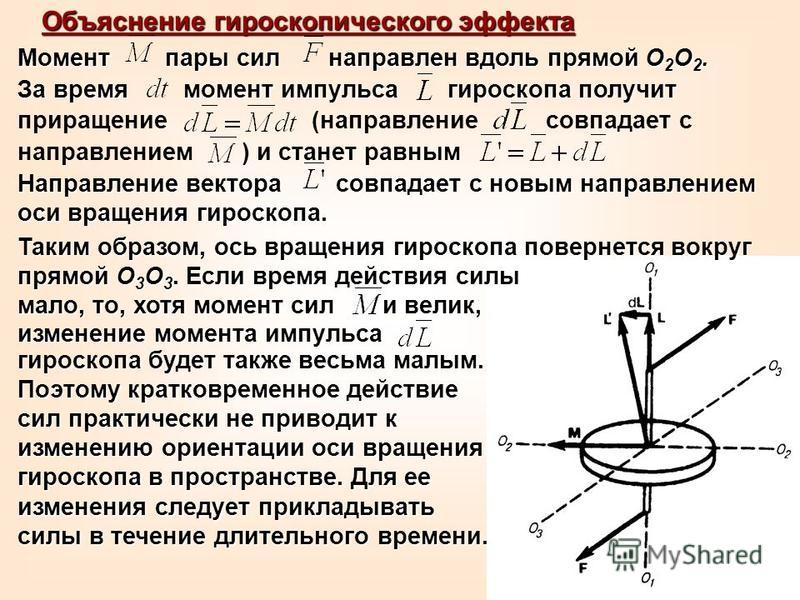 Глава X. ДАЛЬНЕЙШИЕ ПРИЛОЖЕНИЯ УРАВНЕНИЙ ЛАГРАНЖА § 10.2. Исключение одной координаты. § 10.3. Гироскопическая устойчивость. § 10.4. Явное выражение для R в общем случае. § 10.5. Вращающийся волчок. § 10.6. Линейные члены в функции L. § 10.7. Движение относительно подвижной системы отсчета. § 10.8. Движение частицы вблизи заданной точки на поверхности Земли. § 10.9. Маятник Фуко. § 10.11. Диссипативная функция Релея. § 10.12. Гироскопическая система с диссипацией. § 10.13. Уравнения Гамильтона. § 10.14. Уравнение энергии и явное выражение для Н. § 10.15. Главный триэдр. Глава XI. ПЕРЕМЕННАЯ МАССА § 11.1. Частица переменной массы. Функция Лагранжа. § 11.2. Кинетическая энергия. § 11.3. Функция Гамильтона. § 11.4. Движущийся электрон. § 11.2. Кинетическая энергия. § 11.5. Электрон в электромагнитном поле. Глава XII. УРАВНЕНИЯ ГИББСА-АППЕЛЯ § 12.3. Пятая форма основного уравнения. 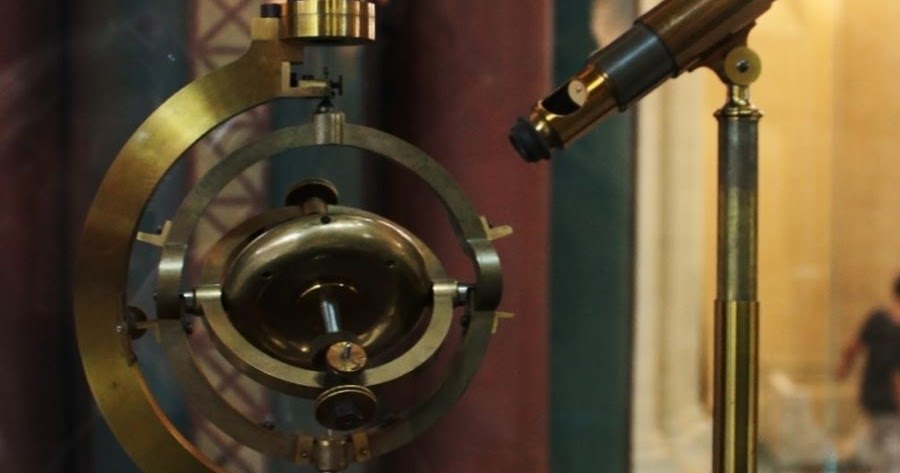 § 12.5. Уравнения Гиббса — Аппеля. Глава XIII. ПРИЛОЖЕНИЯ УРАВНЕНИЙ ГИББСА-АППЕЛЯ § 13.2. Аналог теоремы Кёнига. § 13.3. Плоское движение. § 13.4. Движение твердого тела. § 13.5. Шар на вращающейся плоскости. § 13.6. Шар на вращающейся наклонной плоскости. § 13.7. Качение шара по неподвижной поверхности. § 13.8. Вращающийся волчок. § 13.9. Качение монеты (тонкого диска). § 13.10. Уравнения Эйлера. § 13.11. Свободное тело; случай осевой симметрии. § 13.12. Свободное тело; общий случай. § 13.13. Ориентация свободного тела. § 13.14. Теоремы Пуансо и Сильвестра. § 13.16. Устойчивость вращающегося эллипсоида. Глава XIV. ТЕОРИЯ УДАРА § 14.1. Ударный импульс. § 14.2. Импульсные связи. § 14.3. Движение системы, на которую действуют ударные импульсы. Основное уравнение теории удара. § 14.4. Катастатическая система. § 14.5. Принцип наименьшего принуждения в теории удара.  § 14.6. Катастатическая система. Теорема о суперпозиции. § 14.7. Катастатическая система. Шесть теорем об энергии. § 14.8. Лагранжевы координаты и квазикоординаты. § 14.9. Лагранжева форма уравнений движения в теории удара. § 14.11. Приложения теории удара. § 14.12. Импульсивное движение непрерывных систем. Глава XV. ШЕСТАЯ ФОРМА ОСНОВНОГО УРАВНЕНИЯ § 15.1. Шестая форма основного уравнения. § 15.2. Непосредственные выводы. § 15.3. Функция Рауса. § 15.4. Теорема … § 15.5. Главная функция. § 15.6. Примеры использования главной функции. § 15.7. Доказательство равенства … § 15.8. Свойства главной функции. § 15.9. Примеры непосредственного вычисления главной функции. Глава XVI. ТЕОРЕМА ГАМИЛЬТОНА—ЯКОБИ § 16.1. Уравнение Гамильтона в частных производных. § 16.2. Теорема Гамильтона — Якоби (доказательство первое). § 16.4.  Теорема Гамильтона — Якоби (доказательство второе). Теорема Гамильтона — Якоби (доказательство второе).§ 16.5. Замечания по теореме Гамильтона — Якоби. § 16.6. Однородное поле. § 16.7. Гармонический осциллятор. § 16.8 Частица в переменном поле At. § 16.9. Центральная орбита. § 16.10. Сферический маятник. § 16.11. Вращающийся волчок. § 16.12. Стержень на вращающейся плоскости. § 16.13. Электрон в центральном поле. § 16.14. Пфаффова форма Глава XVII. СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ, ДОПУСКАЮЩИЕ РАЗДЕЛЕНИЕ ПЕРЕМЕННЫХ § 17.2. Условия разделимости переменных в системах с двумя степенями свободы. § 17.4. Классификация траекторий. § 17.5. Устойчивость. § 17.6. Приложения теории. § 17.7. Притяжение к центру по закону … § 17.8. Притяжение к центру по закону … § 17.9. Ньютоновское притяжение и однородное поле. § 17.10. Два неподвижных притягивающих центра § 17.11. Ограниченные траектории. § 17.12. Уравнения орбит. § 17. 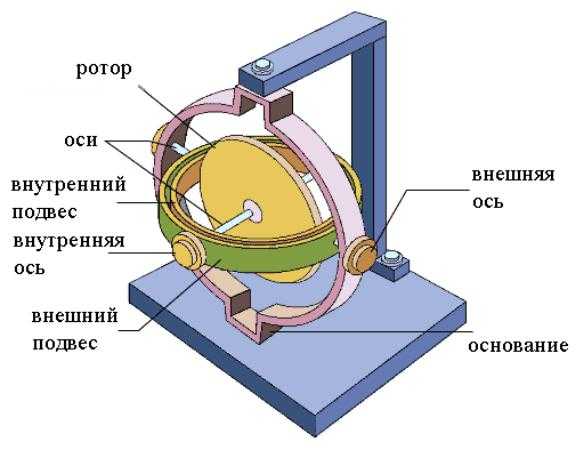 13. Неограниченные орбиты. 13. Неограниченные орбиты.§ 17.14. Системы, допускающие разделение переменных более чем одним способом. Глава XVIII. СИСТЕМЫ С n СТЕПЕНЯМИ СВОБОДЫ, ДОПУСКАЮЩИЕ РАЗДЕЛЕНИЕ ПЕРЕМЕННЫХ § 18.1. Система Лиувилля § 18.2. Теорема Штеккеля. § 18.3. Исследование интегралов. § 18.4. Дополнительные замечания к теореме Штеккеля. § 18.5. Квазипериодические движения. § 18.6. Угловые переменные. § 18.7. Стандартный куб. § 18.8. Постоянные … § 18.9. Соотношения между q и v. § 18.10. Малые колебания. § 18.11. Сферический маятник. § 18.12. Задача двух тел. § 18.13. Интерпретация параметров a и b. § 18.14. Выражение r как функции от t. § 18.15. Угловые переменные. § 18.16. Постоянные … § 18.17. Возмущения. § 18.18. Неортогональные и ненатуральные разделимые системы. Глава XIX. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ, ДВИЖЕНИЕ В ОКРЕСТНОСТИ ОСОБОЙ ТОЧКИ § 19.2. Движение частицы по прямой. § 19.3. Система с одной степенью свободы.  § 19.4. Движение в окрестности особой точки. Линейное приближение. § 19.5. Устойчивость равновесия. Асимптотическая устойчивость и неустойчивость. § 19.6. Движение в окрестности особой точки. Общая теория. § 19.7. Движение в окрестности узла. § 19.8. Движение в окрестности седловой точки. § 19.9. Движение в окрестности фокуса. § 19.10. Движение в окрестности центра. § 19.11. Связь линейного приближения с общей теорией. Глава XX. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ. ЦИКЛИЧЕСКИЕ ХАРАКТЕРИСТИКИ § 20.2. Положительное предельное множество. § 20.3. Отрезок без контакта. § 20.4. Отрезок без контакта, проходящий через точку множества A. § 20.5. Структура множества A. § 20.6. Теорема Пуанкаре — Бендиксона. § 20.7. Приложение к системе частного вида. § 20.8. Существование предельного цикла. § 20.9. Уравнение Ван-дер-Поля. Глава XXI. СИСТЕМЫ С n СТЕПЕНЯМИ СВОБОДЫ. СВОЙСТВА ХАРАКТЕРИСТИК § 21.2. Преобразование к новым координатам.  § 21.3. Оператор Tt § 21.4. Решение в форме степенных рядов. § 21.5. Формула для X(x)-X(a) § 21.6. Интегральные инварианты. § 21.7. Интегральные инварианты порядка m. § 21.8. Свойства множителей. § 21.9. Последний множитель Якоби. § 21.10. Линейная система. § 21.11. Устойчивость равновесия. § 21.12. Дискретная устойчивость. § 21.13. Устойчивость преобразований. § 21.14. Приложение к дифференциальным уравнениям. § 21.15. Теорема Пуанкаре — Ляпунова. § 21.16. Критический случай. Глава XXII. УРАВНЕНИЯ ГАМИЛЬТОНА § 22.1. Уравнения Гамильтона. § 22.2. Скобки Пуассона. § 22.3. Теорема Пуассона. § 22.4. Использование известного интеграла. § 22.5. Линейный интегральный инвариант Пуанкаре. § 22.6. Теорема Лиувилля. § 22.7. Теорема возвращения (теорема Пуанкаре). § 22.8. Примеры инвариантных областей. § 22.9. Эргодические теоремы. § 22.10. Конкретные примеры. § 22.11. Множество … § 22.12. Собственные отрезки.  § 22.13. Доказательство эргодической теоремы; первый этап. § 22.14. Доказательство эргодической теоремы; второй этап. § 22.15. Метрическая неразложимость. § 22.16. Интегралы уравнений движения. § 22.17. Следствие теоремы Лиувилля. § 22.18. Последний множитель. Глава XXIII. ДВИЖЕНИЕ В ОКРЕСТНОСТИ ЗАДАННОГО ДВИЖЕНИЯ. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ § 23.2. Решение уравнений в вариациях. § 23.3. Случай постоянных коэффициентов. § 23.4. Случай периодических коэффициентов. § 23.5. Нулевые показатели. § 23.6. Уравнения в вариациях для системы Гамильтона. § 23.7. Устойчивость траекторий (1). § 23.8. Устойчивость траекторий (2). § 23.9. Устойчивость периодических орбит. § 23.10. Вынужденные колебания. Глава XXIV. КОНТАКТНЫЕ ПРЕОБРАЗОВАНИЯ § 24.1. Контактные преобразования. § 24.2. Формулы контактного преобразования. § 24.3. Другие формулы. § 24.4. Обобщенное точечное преобразование и другие однородные контактные преобразования.  § 24.5. Специальная форма уравнений преобразований. Бесконечно малые контактные преобразования. § 24.6. Обобщение теоремы Лиувилля. § 24.7. Условия контактности преобразования, скобки Лагранжа. § 24.8. Соотношения между двумя системами производных. § 24.9. Условия контактности преобразования, выраженные с помощью скобок Пуассона. § 24.10. Соотношения между скобками Лагранжа и скобками Пуассона. § 24.11. Приложение к контактному преобразованию. § 24.12. Инвариантность скобки Пуассона. § 24.13. Другая форма условий контактности преобразования. § 24.14. Функции, находящиеся в инволюции. § 24.15. Некоторые примеры. Глава XXV. ТЕОРИЯ ПРЕОБРАЗОВАНИЙ § 25.1. Уравнения движения после контактных преобразований. § 25.2. Вариация элементов траектории. § 25.3. Вариация эллиптических элементов. § 25.4. Другие доказательства теоремы Якоби. § 25.5. Постоянство скобок Лагранжа. § 25.6. Бесконечно малые контактные преобразования. § 25. 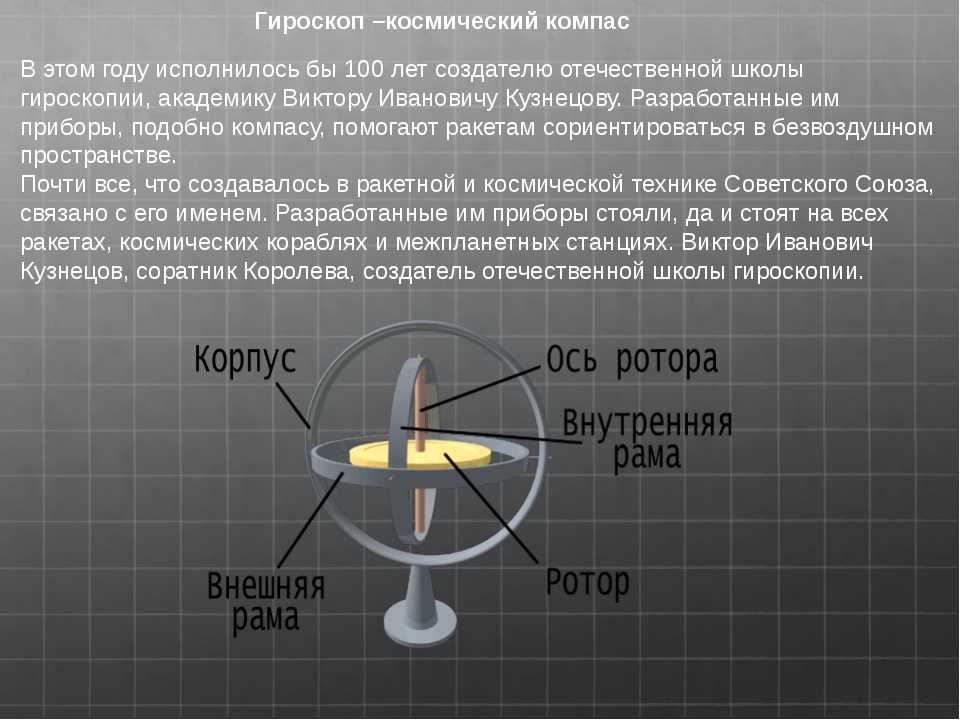 7. Интегралы в инволюции. 7. Интегралы в инволюции.§ 25.8. Теорема Ли о системах в инволюции. § 25.9. Интегралы, линейные относительно импульсов. § 25.10. Случай, когда функция Гамильтона является однородной квадратичной формой Глава XXVI. ВАРИАЦИОННЫЕ ПРИНЦИПЫ § 26.2. Теорема Ливенса. § 26.3. Точки минимума и седловые точки. § 26.4. Асинхронное варьирование. Принцип Гёльдера. § 26.5. Принцип Фосса. § 26.6. Обобщение принципа Гамильтона. § 26.7. Замена независимой переменной. § 26.8. Нормальная форма системы с двумя степенями свободы. § 26.9. Система Лиувилля. § 26.10. Конформные преобразования. Глава XXVII. ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ § 27.3. Принцип наименьшего действия в форме Якоби. § 27.4. Теорема Уиттекера. § 27.5. Исключение координат. § 27.6. Характеристическая функция. § 27.7. Пространство конфигураций. § 27.8. Система с двумя степенями свободы. § 27.9. Теорема Кельвина. § 27.10. Однородное поле. § 27.11. Задача Тэта.  Непосредственное решение. Непосредственное решение.§ 27.12. Задача Тэта. Теория огибающих. Глава XXVIII. ОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ § 28.2. Ограниченная задача. Уравнения движения. § 28.3. Положения равновесия. § 28.4. Положения равновесия на прямой АВ. § 28.5. Положения равновесия, не лежащие на прямой АВ § 28.6. Поверхность z=U. § 28.7. Движение вблизи положения равновесия. § 28.8. Теория движения Луны. Глава XXIX. ЗАДАЧА ТРЕХ ТЕЛ § 29.2. Случай, когда вектор момента количеств движения равен нулю. § 29.3. Три точки Лагранжа. § 29.4. Решения, для которых треугольник Лагранжа сохраняет свою форму. § 29.5. Случай плоского движения. § 29.6. Координаты относительно частицы Az § 29.7. Движение в окрестности равновесного решения. § 29.8. Сведение к системе шести уравнений. § 29.9. Устойчивость трех точек Лагранжа. § 29.10. Преобразованная форма уравнений движения. § 29.11. Другой подход к задаче трех точек Лагранжа. § 29.12. Сведение к системе восьми уравнений. 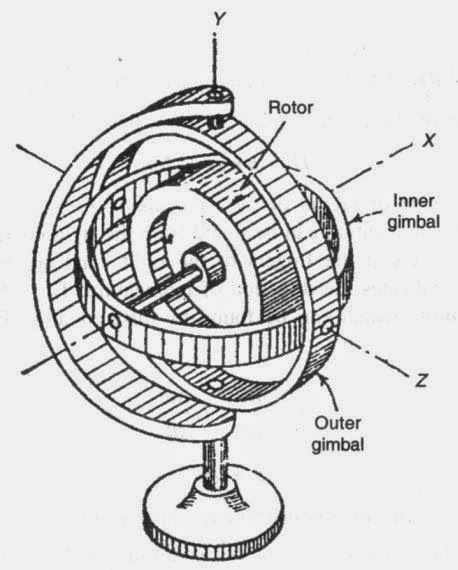 § 29.13. Невозможность тройных столкновений. § 29.14. Плоское движение. Другой способ приведения к системе шестого порядка. § 29.15. Равновесные решения. Глава XXX. ПЕРИОДИЧЕСКИЕ ОРБИТЫ § 30.1. Периодические орбиты. § 30.3. Условия вещественности. § 30.4. Уравнения Гамильтона. § 30.5. Сходимость. § 30.6. Три точки Лагранжа. § 30.7. Системы, содержащие параметр. § 30.8. Приложение к ограниченной задаче трех тел. § 30.9. Метод неподвижной точки. § 30.11. Периодические орбиты и теорема о кольце. § 30.12. Доказательство теоремы Пуанкаре о кольце. |

Гироскопы и их применение – где используется, устройство
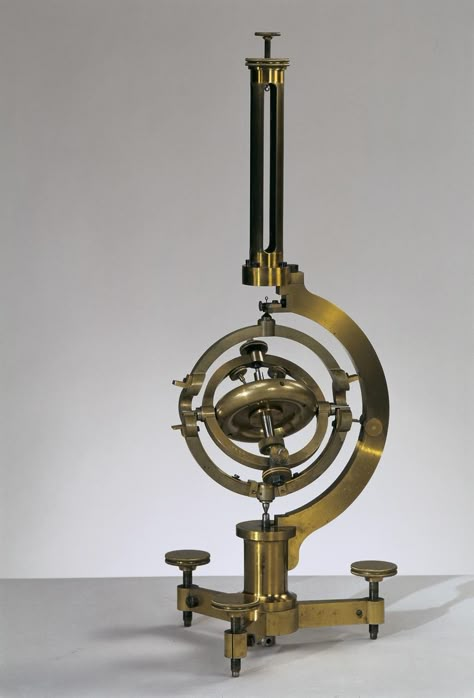
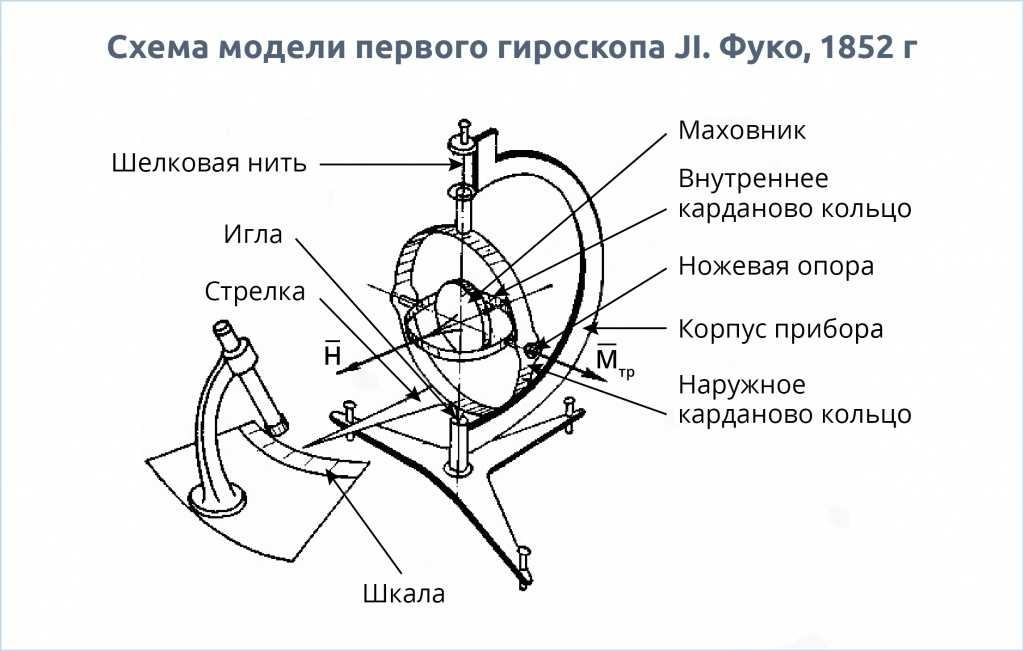
В 1852 году французский физик Леон Фуко демонстрирует созданный им прибор, позволяющий обнаружить вращение Земли. Гироскоп – так назвал он этот прибор. По гречески Гирос – вращение, Скопео – вижу, наблюдаю. В обзоре вы узнаете что такое гироскопы и их применение.
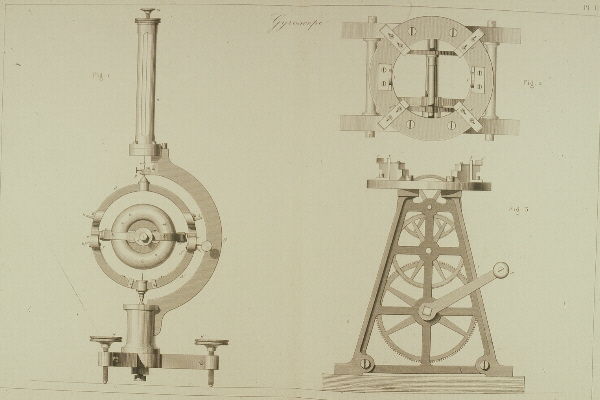
Гироскоп Фуко представляет собой вращающийся ротор, подвешенный так, что его ось может поворачиваться в любом направлении вокруг некоторой неподвижной точки. Современное исполнение прибора получило название – гироскоп в кардановом подвесе. Он выполнен из двух рамок: наружной, внутренней, и ротора.
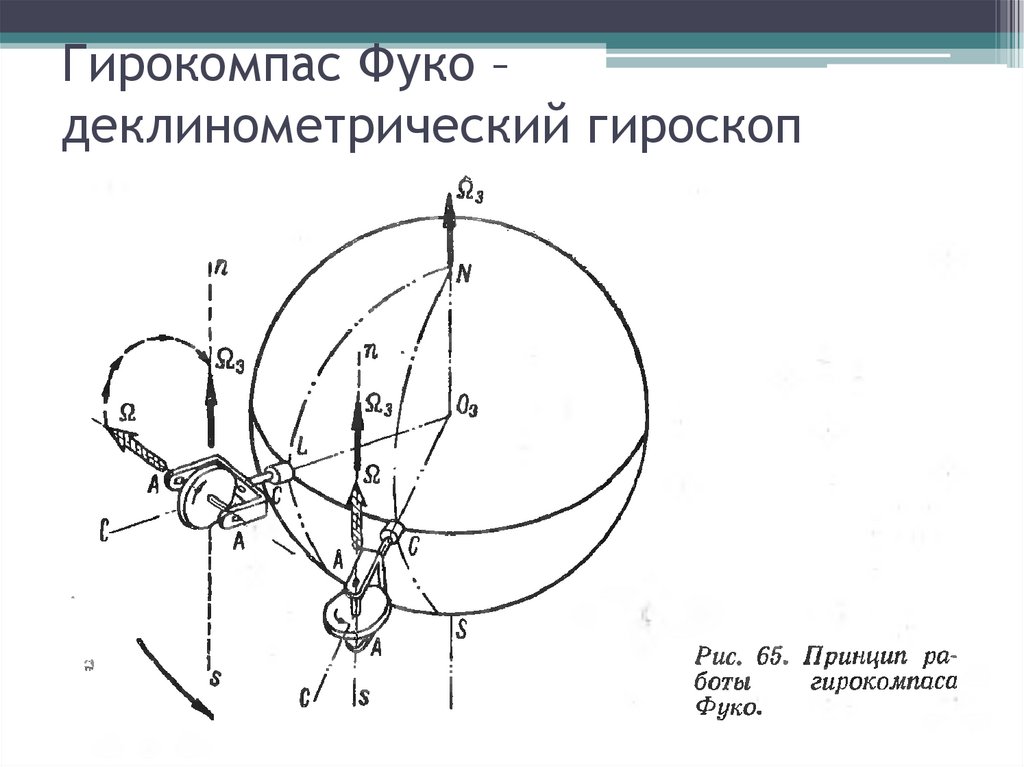
Гироскоп ФукоОси вращения рамок и ротора в гироскопе Фуко пересекаются в точке «О» — центре подвеса, совпадающей с центрами масс этих тел. Если трение в подшипниках достаточно мало, то прибор приобретает замечательные свойства. Как бы ни поворачивалось его основание, ось ротора сохраняет неизменное направление в инерциальном пространстве. На этом свойстве гироскопа и был основан опыт Фуко.
Ось вращения гироскопаНаблюдая за гироскопом, установленным на поверхности Земли, мы обнаружим, что ось ротора, сохраняя неизменным направление в инерциальном пространстве, изменяет свою ориентацию относительно предметов, расположенных на вращающейся Земле. На использовании этого и других специфических свойств вращающегося ротора основано действие многих приборов, нашедших широкое применение на самолетах, морских судах, в ракетах. Эти приборы получили название гироскопических. А сам ротор стали называть гироскопом.
На использовании этого и других специфических свойств вращающегося ротора основано действие многих приборов, нашедших широкое применение на самолетах, морских судах, в ракетах. Эти приборы получили название гироскопических. А сам ротор стали называть гироскопом.
Применяют не только карданов подвес, но и другие способы подвешивания ротора. Таковы, например, шаровой гироскоп на аэродинамическом подвесе. Здесь ротор плавает на воздушной подушке, и гироскоп, подвешенный в электромагнитном поле.
шаровой гироскопшаровой гироскопГироскопы можно встретить не только в приборах. Волчок – это простейший гироскоп. Он сложным образом вращается вокруг своей точки опоры. Гироскопические свойства мы обнаруживаем и в роторе многотонной турбины судна, и во вращающихся винтах самолета и вертолета.
Некоторые особенности вращения Земли, о которых мы расскажем далее, также объясняются гироскопическими свойствами.
Кинетический моментГироскопический момент Н относительно неподвижной точки О, возникающий при вращении его вокруг полярной оси (ее кратко называют осью гироскопа), направлен вдоль этой оси, называется собственным кинетическим моментом гироскопа. Он равен произведению полярного момента инерции гироскопа на угловую скорость.
Он равен произведению полярного момента инерции гироскопа на угловую скорость.
Кинетический момент гироскопа Ке при вращении его вокруг любой экваториальной оси с угловой скоростью ωе направлен вдоль этой оси и равен произведению экваториального момента инерции Iе и угловой скорости ωе.
Формула кинетического моментаПри вращении гироскопа одновременно вокруг полярной и экваториальной осей кинетический момент его складывается из собственного момента Н и экваториальной составляющей Ке.
Формула кинетического моментаПолярная и экваториальная осьГироскопы и их применение в технике, скорость собственного вращения достигает десятков тысяч оборотов в минуту, и обычно больше экваториальной в сотни тысяч раз.
скорость собственного вращенияА моменты инерции относительно этих осей – величины одного порядка.
моменты инерцииВследствие этого длина вектора Н во много раз превышает длину вектора Ке, и суммарный момент мало отличается от вектора Н.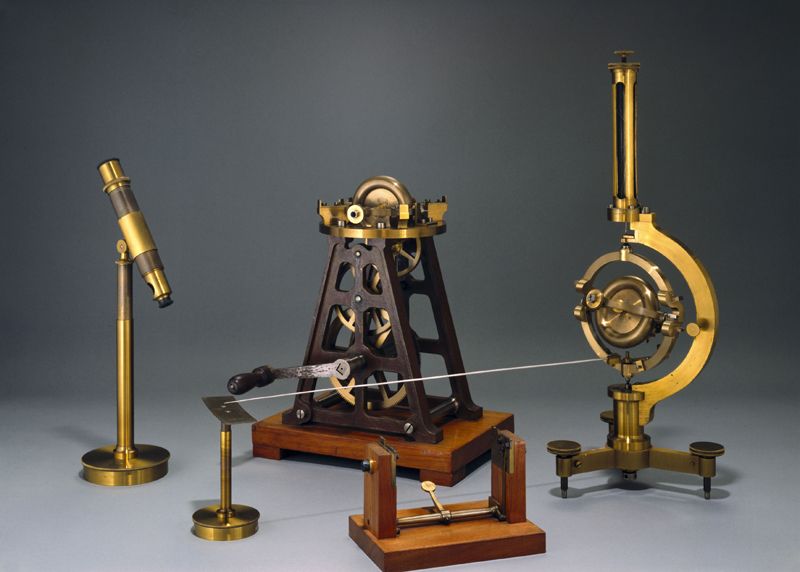
Итак, кинетический момент быстро вращающегося гироскопа можно с большой степенью точности принять равным его собственному моменту, и следовательно, направленным всегда вдоль его полярной оси.
кинетический момент быстро вращающегося гироскопаПриближенную теорию гироскопа, основанную на этом допущении, принято называть прецессионной. При рассмотрении гироскопа в кардановом подвесе в приближенной теории пренебрегают кинетическим моментом рамы. Вследствие того, что их угловые скорости, а следовательно и кинетические моменты, пренебрежимо малы по сравнению с собственным моментом.
Правило прецессииСилы, приложенные к гироскопу, сообщают его оси движение, скорость и направление которого можно легко определить с помощью теоремы Резаля: скорость конца вектора Н всегда равна моменту внешних сил М, приложенных к гироскопу.
Правило прецессииПредположим теперь, что к гироскопу относительно какой-либо его экваториальной оси приложен момент Ме. Это вызывает вращение вектора Н, а следовательно, и полярной оси с угловой скоростью ω.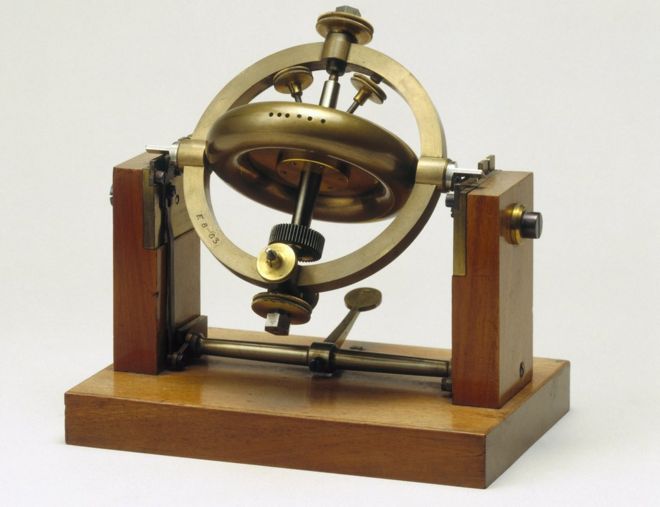
Вращение оси прибора при действии момента внешних сил называют прецессией. Правило прецессии: направление прецессии всегда таково, что вектор Н по кратчайшему пути совмещается с вектором Ме. Угловая скорость прецессии равна отношению экваториальной составляющей момента внешних сил Ме к собственному моменту Н.
Угловая скорость прецессииКоротко правило прецессии можно выразить векторной формулой:
правила прецессииправила прецессииЧитайте: Серверы Edge Power R730 210-ACXU
Из правила прецессии следует очень важный вывод: если момент внешних сил относительно неподвижной точки равен нулю, то ось гироскопа остается неподвижной. Наблюдая за поведением гироскопа в кардановом подвесе, убедимся, что оно происходит в согласии с правилом прецессии.
Момент, стремящийся повернуть гироскопМомент, стремящийся повернуть гироскоп вокруг оси Х, вызывает прецессию вокруг перпендикулярной к ней оси Z. А момент вокруг оси Z сообщает прибору прецессию вокруг оси Х.
| Жан-Бернар-Леон Фуко(1819-1868) Жан-Бернар-Леон Фуко был французским физиком, которого считают одним из самых разносторонних экспериментаторов девятнадцатого века. 18 сентября 1819 года Фуко родился в Париже, Франция, в семье издателя. Его раннее образование было получено дома, и он подавал юношеские надежды в механике. Получив степень бакалавра гуманитарных наук, Фуко поступил в медицинскую школу, но вскоре отказался от этой программы. Вместо этого он начал работать на Альфреда Донна, готовясь к университетскому курсу медицинской микроскопии. Поскольку его элементарная математическая и научная подготовка не соответствовала его интересам, Фуко дополнил ее, когда стал заниматься изобретениями и экспериментами. Фуко познакомился с французским физиком Арманом Физо в 1839 году, и они тесно сотрудничали почти десять лет. Вместе они сделали первые подробные снимки поверхности Солнца и разработали более точный способ измерения скорости света в 1849 году. Сменив Донна на посту научного редактора французского издания Journal des Dbats в 1845 году, наиболее широко признанный подвиг Фуко был завершен лишь несколько лет спустя. Используя маятник для создания часов, используемых для управления телескопами, он наткнулся на идею применения этой техники для доказательства того, что Земля вращается вокруг своей оси. Фуко основывал свое доказательство на законе Ньютона, который гласит, что когда тело приведено в движение, оно будет двигаться по прямой линии от своего начала до тех пор, пока на него не воздействуют внешние силы. Фуко впервые продемонстрировал свое доказательство на Всемирной выставке 1851 года в Пантеоне в Париже. Гироскоп был еще одним устройством, изобретенным Фуко для демонстрации движения Земли вокруг своей оси. Разработанный им аппарат принес ему Крест Почетного легиона и является основой современного гирокомпаса. Фуко получил должность физика Парижской обсерватории с 1855 года и был одним из первых, кто продемонстрировал существование вихревых токов, генерируемых магнитными полями, которые иногда называют токами Фуко .. Среди других наград, оказанных ему, – медаль Копли Лондонского королевского общества, а также избрание в Бюро долгот и Французскую академию наук. Однако его успешная карьера закончилась преждевременно, когда он перенес внезапный паралич и умер в возрасте 48 лет. Измерение скорости света . Начиная с 1676 открытий Оле Ремера, скорость света измерялась по крайней мере 163 раза более чем 100 исследователями с использованием самых разных методов. НАЗАД К ПИОНЕРАМ ОПТИКИ Вопросы или комментарии? Отправить нам письмо.© 1995-2022 автор Майкл В. Дэвидсон и Университет штата Флорида. Все права защищены. Никакие изображения, графика, программное обеспечение, сценарии или апплеты не могут быть воспроизведены или использованы каким-либо образом без разрешения владельцев авторских прав. Использование этого веб-сайта означает, что вы соглашаетесь со всеми правовыми положениями и условиями, изложенными владельцами.Этот веб-сайт поддерживается нашимГруппа графического и веб-программирования в сотрудничестве с Optical Microscopy в Национальной лаборатории сильного магнитного поля.  Последнее изменение пятница, 13 ноября 2015 г., 14:19Количество обращений с 24 декабря 1999 г.: 99882Посетите сайты наших партнеров в сфере образования: | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Он хорошо известен своими экспериментами в области оптики и механики и участвовал в разработке метода измерения скорости света с предельной точностью. Фуко чаще всего помнят за то, что он доказал с помощью маятника, что Земля вращается вокруг своей оси.
Он хорошо известен своими экспериментами в области оптики и механики и участвовал в разработке метода измерения скорости света с предельной точностью. Фуко чаще всего помнят за то, что он доказал с помощью маятника, что Земля вращается вокруг своей оси.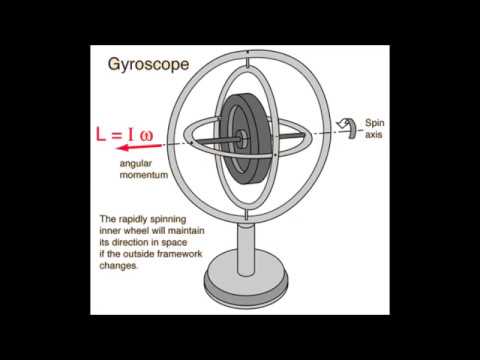 Фуко независимо доказал, что скорость света в воздухе больше, чем в воде. Его другие вклады в область оптики включали метод измерения кривизны зеркал телескопа, усовершенствованную технику серебряных астрономических зеркал, метод проверки зеркал телескопа на наличие поверхностных дефектов и изобретение поляризационной призмы для ориентации и управления поляризованным светом. .
Фуко независимо доказал, что скорость света в воздухе больше, чем в воде. Его другие вклады в область оптики включали метод измерения кривизны зеркал телескопа, усовершенствованную технику серебряных астрономических зеркал, метод проверки зеркал телескопа на наличие поверхностных дефектов и изобретение поляризационной призмы для ориентации и управления поляризованным светом. . Он показал, что хотя маятник, казалось, менял свою траекторию в течение дня, на самом деле под маятником вращался пол. Поскольку пол прикреплен к Земле, должна вращаться Земля.
Он показал, что хотя маятник, казалось, менял свою траекторию в течение дня, на самом деле под маятником вращался пол. Поскольку пол прикреплен к Земле, должна вращаться Земля. Наконец в 1983, более чем через 300 лет после первой серьезной попытки измерения, скорость света была определена Семнадцатым Всеобщим конгрессом по мерам и весам как 299 792,458 километра в секунду. Таким образом, метр определяется как расстояние, которое свет проходит через вакуум за интервал времени 1/299 792 458 секунды. Однако в целом (даже во многих научных расчетах) скорость света округляется до 300 000 километров (или 186 000 миль) в секунду.
Наконец в 1983, более чем через 300 лет после первой серьезной попытки измерения, скорость света была определена Семнадцатым Всеобщим конгрессом по мерам и весам как 299 792,458 километра в секунду. Таким образом, метр определяется как расстояние, которое свет проходит через вакуум за интервал времени 1/299 792 458 секунды. Однако в целом (даже во многих научных расчетах) скорость света округляется до 300 000 километров (или 186 000 миль) в секунду.[PDF] Двойной маятниковый гироскоп Фуко
- статья{Senkal2015DualFP,
title={Двойной маятниковый гироскоп Фуко},
автор={Дорук Сенкал и Александра Ефимовская и Андрей М. Шкель},
Journal={2015 Преобразователи – 18-я Международная конференция по твердотельным датчикам, исполнительным механизмам и микросистемам (ПРЕОБРАЗОВАТЕЛИ) 2015 г.},
год = {2015},
страницы={1219-1222}
}
- Сенкал Д., Ефимовская А., Шкель А.
- Опубликовано 21 июня 2015 г.
- Физика, техника
- 2015 Преобразователи – 2015 18-я Международная конференция по твердотельным датчикам, исполнительным механизмам и микросистемам (ПРЕОБРАЗОВАТЕЛИ)
Мы сообщаем о новом типе вырожденного режима МЭМС архитектура гироскопа с сосредоточенными массами.
 Гироскоп с двойным маятником Фуко (DFP) состоит из двух динамически эквивалентных механически связанных контрольных масс, колеблющихся в противофазе. Такое поведение камертона с двумя осями создает динамически сбалансированный резонатор с xy-симметрией по частоте и демпфированию. Фазовая синхронизация устанавливается за счет механического соединения двух контрольных масс, тогда как квадратурное гашение достигается за счет четырех…
Гироскоп с двойным маятником Фуко (DFP) состоит из двух динамически эквивалентных механически связанных контрольных масс, колеблющихся в противофазе. Такое поведение камертона с двумя осями создает динамически сбалансированный резонатор с xy-симметрией по частоте и демпфированию. Фазовая синхронизация устанавливается за счет механического соединения двух контрольных масс, тогда как квадратурное гашение достигается за счет четырех… Посмотреть на IEEE
mems.eng.uci.eduРежим высокого качества Заказной двойной маятниковый гироскоп Фуко
- М. Асадян, С. Аскари, А. Шкель
Физика, инженерия
2018 ДАТЧИКИ IEEE
- 2018
В этой статье представлена реализация механизма связи на динамически сбалансированных гироскопах с двойным маятником Фуко (DFP), упорядочивающих противофазные и синфазные режимы вибрации. Широкий…
Электростатическая компенсация конструктивных несовершенств в двухмассовом гироскопе с динамическим усилением
Кориолисовы вибрационные гироскопы MEMS с согласованием мод: миф или реальность?
- И.
 Приходько, Дж. А. Грегори, Т. Кенни
Приходько, Дж. А. Грегори, Т. Кенни Инженерное дело
Симпозиум IEEE/ION по положению, местоположению и навигации (ПЛАНЫ) 2016 г.
- 2016 9 0308
- J.
 Giner, Y. Zhang, T. Sekiguchi
Giner, Y. Zhang, T. Sekiguchi Инженерное дело
2016 ДАТЧИКИ IEEE
- 2016
- А. Ефимовская, Данменг Ван, А. Шкель
Инжиниринг
- 2020
- Tian Zhang, Bin Zhou, Peng Yin, Zhiyong Chen, Rong Zhang
- 90 252 Инженерия, физика
Датчики
- 2016
- Shihe Wang, Jianlin Chen, T. Tsukamoto, Shuji Tanaka
Физика
Сенсоры
- 2023
- Аскари С.
 , Асадян М., Шкель А.
, Асадян М., Шкель А. Машиностроение
Микромашины
- 2021
- Сенкал Д., Ефимовская А., Шкель А.
Физика, инженерия
2015 Международный симпозиум IEEE по инерциальным датчикам s and Systems (ISISS) Материалы
- 2015
- A.
Challoner, Howard H. Ge, John Y. Liu
Engineering
2014 Симпозиум IEEE/ION по положению, местоположению и навигации — ПЛАНЫ 2014
90 305- 2014
- Трусов А., Атикян Г., Шкель А.
Инженерное дело
2014 IEEE/ION Симпозиум по положению, местоположению и навигации – ПЛАНЫ 2014
- 2014 9 0308
- F. Ayazi, K. Najafi
Engineering
- 2001 9 0308
- А. Шкель
Инженерия, физика
2006 IEEE/ION Position, Location, And Navigation Symposium
90 305- 2006
- Дж.
Контур согласования режима, основанный на контроле Кориолиса Выход канала в ответ на квадратурный электродный дизеринг предлагается, демонстрируя путь к гироскопу MEMS с согласованием мод с низким уровнем шума, широкой полосой измерения и стабильностью смещения в зависимости от окружающей среды.
МЭМС-гироскоп с концентрированными пружинными подвесками, демонстрирующий одноразрядное разделение частот и температурную устойчивость
Мы сообщаем о новом подходе к проектированию симметричного X-Y резонатора, подчеркивая повышение симметрии за счет локализации анкеров устройства. Резонатор механизирован как гироскоп скорости с осью Z…
Концентрированная пружинная архитектура для одноразрядной частотной симметрии в Si MEMS-гироскопе
Мы сообщаем о новом подходе к проектированию XY-симметричного резонатора, который может быть механизирован как частотный (RG) или частотно-интегрирующий гироскоп (RI). G), с одной цифрой
Оптимальная конструкция четырехмассового гироскопа с центральной опорой (CSQMG) †
Более полное описание процесса проектирования четырехмассового гироскопа с центральной опорой (CSQMG), гироскопа, который, как ожидается, обеспечит прорывную производительность для плоских конструкций, показывает, что CSQMG обладает большим потенциалом для достижения характеристик навигационного уровня.

Пьезоэлектрический дисковый гироскоп, изготовленный из монокристалла ниобата лития
Пьезоэлектрический дисковый гироскоп, изготовленный из монокристаллической пластины ниобата лития (LN), был разработан для инерциальных навигационных систем для определения местоположения во время автоматизированного вождения. LN обладает высоким…
Многокольцевой дисковый резонатор с эллиптическими спицами для частотно-модулированного гироскопа
В этой статье мы сообщаем о многокольцевом дисковом резонаторе с эллиптическими спицами для компенсации анизоупругости (100) монокристаллического кремния. Структурная связь между каждым сегментом кольца может…
Работа четырехмассового гироскопа в режиме угловой скорости
Это делается вывод, что в реалистичном гироскопе MEMS с несовершенствами более высокий коэффициент добротности повысит стабильность частоты оси привода, что приведет к улучшению шумовых характеристик, но имеет проблемы с реализацией цифровых контуров управления.
Минимальная реализация динамически уравновешенного гироскопа WA с сосредоточенными массами: двойной маятник Фуко
Мы сообщаем о новом типе МЭМС-интегрирующего гироскопа. Двойной маятник Фуко (DFP) состоит из двух динамически эквивалентных, механически связанных контрольных масс, колеблющихся в…
Дисковый резонаторный гироскоп Boeing
Как микроэлектромеханический Система гироскопов (MEMS) разрабатывалась для автомобильной безопасности и военно-тактических приложений, в 1994 году компания Boeing выбрала полусферический резонатор с традиционной механической обработкой…
Flat еще не умер: текущие и будущие характеристики системы Si-MEMS Quad Mass Gyro (QMG)
В этом документе представлены подробные сведения о состоянии производительности, моделировании и проекции для кремниевого MEMS Quadruple Mass Gyroscope (QMG) — уникального высокодобротного, сосредоточенного и симметричного по модам кориолисова класса II…
Микромеханический гребенчатый камертонный гироскоп
Разработка монокристаллического и поликремниевого камертонов Сообщается о гироскопах очень малого размера и низкой стоимости с использованием технологии микропроизводства.
 Эти камертонные гироскопы чрезвычайно…
Эти камертонные гироскопы чрезвычайно…Тороидальный кольцевой гироскоп с добротностью 100K, реализованный в процессе эпитаксиальной кремниевой герметизации на уровне пластины
В этой статье сообщается о новом типе гироскопа с вырожденной модой с измеренной добротностью > 100 000 в обеих модах при компактном размере диаметром 1760 мкм. Тороидальный кольцевой гироскоп состоит из внешнего…
A Поликремниевого вибрирующего кольцевого гироскопа HARPSS
В этой статье представлены проектирование, изготовление и испытания поликремниевого кольцевого гироскопа (PRG) толщиной 80 spl mu/m и диаметром 1,1 мм с большим соотношением сторон (20:1). Вибрационный кольцевой гироскоп был…
Микромеханические вибрационные гироскопы типа I и типа II
Все с микрообработкой Вибрационные гироскопы (МВГ) основаны на том принципе, что силы Кориолиса, возникающие при вращении гироскопа, вызывают передачу энергии между двумя режимами гироскопа…
МИКРО ОБОЛОЧНЫЕ РЕЗОНАТОРЫ ИЗ ПЛАВЛЕННОГО КРЕМНИЯ С 1,2 МИЛЛИОНА Q И ПОСТОЯННОЙ ВРЕМЕНИ ЗАПАДА 43 СЕК