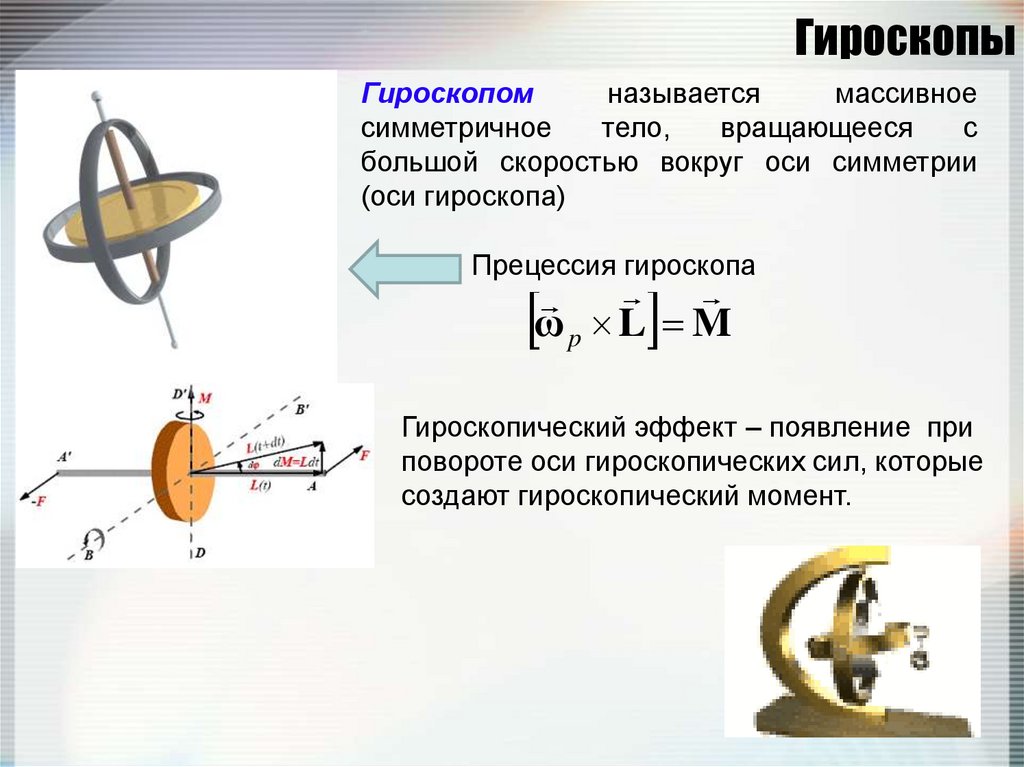
Гироскоп. Виды и устройство. Работа и применение. Особенности
Гироскоп – это устройство со свободной осью вращения, способное реагировать на изменение угла ориентирования тела, в котором оно закрепляется. Ключевая особенность прибора в сохранении неизменного положения, что позволяет его использовать как датчик для определения перемещения и поворота объекта, в котором он расположен.
В упрощенном варианте изложения принципа работы классического устройства его можно сравнить с обыкновенным детским волчком. Центральный элемент прибора вращается по своей вертикальной оси, при этом он фиксируется в рамке. Последняя способна поворачиваться только по горизонтальной оси. Она закрепляется в еще одной рамке, которая может оборачиваться вокруг третьей оси. Такая конструкция прибора позволяют его центральному элементу всегда находиться в вертикальном положении, вне зависимости от того как будет поворачиваться корпус гироскопа.
Разновидности гироскопов по принципу действияКонструкцию гироскопа принято разделять на две группы по принципу действия:
- Механические.

- Оптические.

Первыми появились механические приборы, от которых и пошло изучение гироскопического эффекта. Однако сфера использования таких устройств ограничена и не позволяет их интегрировать в современную технику, которая нуждается в ориентире для определения положения в пространстве. Вследствие этого появилась оптическая группа гироскопов.
МеханическиеДанные приборы представляют собой классическую конструкцию. Наиболее ярким представителем данной группы является роторный гироскоп. Он представляет собой быстро вращающееся твердое тело. Его ось вращения может свободно изменять свою ориентацию в пространстве. Во время работы устройства скорость вращения его центрального элемента значительно превышает обороты по другим осям. Благодаря этому роторный прибор способен сохранять направление оси вращения даже при воздействии на корпус устройства внешних сил. При попытке переместить прибор наблюдается эффект сопротивления.
Роторные устройства не используются как датчики, а являются стабилизирующим элементом для различных конструкций и механизмов. По данному принципу изготовляется спортивный кистевой гироскопический тренажер. Такой прибор представляет собой шар, внутри которого располагается гироскопический элемент со своей осью вращения.
По данному принципу изготовляется спортивный кистевой гироскопический тренажер. Такой прибор представляет собой шар, внутри которого располагается гироскопический элемент со своей осью вращения.
Для его запуска применяется небольшой шнурок, который наматывается на центральную часть тренажера. При его выдергивании центральное тело начинает вращаться по своей оси, при этом внешняя оболочка тренажер раскручивается кистью по часовой стрелке. Вращающееся центральное тело начинает противодействовать оборотам корпуса, создавая значительную нагрузку. При этом такое воздействие лишь ускоряет обороты главного элемента, повышая противодействие. После запуска тренажер сложно удержать в руке, поскольку он постоянно норовит вырваться в разные стороны. Создается впечатление удержания живого объекта.
ОптическиеДанная группа устройств представлена несколькими разновидностями. Все они работают на основании физического эффекта Саньяка. Согласно ему, скорость света является постоянной в инерциальной системе отсчетов. При этом если отправить луч в неинерциальной системе, то его скорость поменяется. Если траектория луча будет проходить через место вращения устройства, то произойдет задержка по времени достижения светом конечной точки. Получаемая оптическая разница напрямую зависит от величины углового поворота датчика.
При этом если отправить луч в неинерциальной системе, то его скорость поменяется. Если траектория луча будет проходить через место вращения устройства, то произойдет задержка по времени достижения светом конечной точки. Получаемая оптическая разница напрямую зависит от величины углового поворота датчика.
Гироскоп широко используется в:
- Авиации.
- Автомобилестроении.
- Мобильных устройствах и прочая подобная техника.
- Системах стабилизации видеокамер.
- Навигации.
Датчики, работающие по принципу гироскопа, являются неотъемлемым оборудованием в авиации. Два гироскопа устанавливаются на крыльях самолета, благодаря чему можно получать информацию о его повороте вокруг вертикальной оси. Распространенные сейчас беспилотники имеют три гироскопа, без которых управление летательным аппаратом и его точное балансирование было бы невозможным.
Наличие гироскопа обязательно для нормального функционирования навигационных систем. Такие датчики многократно увеличивают фактическую точность определения координат с погрешностью в несколько сантиметров. Дело в том, что навигация по спутниковому сигналу в определенных условиях работает хуже или полностью отказывает. В таком случае ориентация в пространстве возможна только с помощью гироскопа. Это в первую очередь наблюдается при нахождении под землей, под водой или в космосе. Комбинирование спутниковых и гироскопических систем дает возможность добиться максимальной точности определения местоположения движущихся объектов.
Такие датчики многократно увеличивают фактическую точность определения координат с погрешностью в несколько сантиметров. Дело в том, что навигация по спутниковому сигналу в определенных условиях работает хуже или полностью отказывает. В таком случае ориентация в пространстве возможна только с помощью гироскопа. Это в первую очередь наблюдается при нахождении под землей, под водой или в космосе. Комбинирование спутниковых и гироскопических систем дает возможность добиться максимальной точности определения местоположения движущихся объектов.
Гироскоп является не только полезным, но и интересным устройством, принцип работы которого был внедрен в производство нескольких видов детских игрушек. Примером этого является йо-йо, волчок, спиннер, кистевой гироскопический тренажер. В данном случае ценится качество устройства удерживаться в определенном положении благодаря вращению по главной оси. Что касается свойства гироскопа выступать в качестве датчика, то оно применяется при изготовлении вертолетов на радиоуправлении, квадрокоптеров.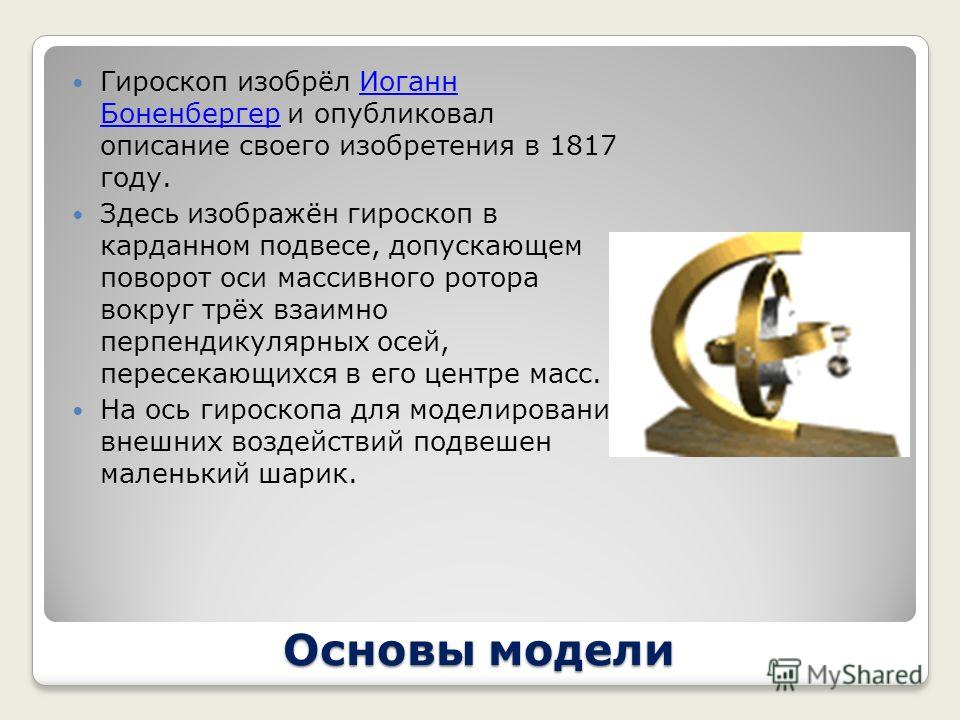
В мобильной технике гироскоп применяется благодаря его свойству реагировать на изменение углов ориентации тела. Прибор выступает в качестве датчика, позволяющего определить, что мобильный телефон или планшет был повернут в ту или иную сторону. Наличие устройства позволяет получить информацию об изменении положения тела в 3 плоскостях. Внедренные в гаджеты гироскопы внешне напоминают миниатюрную микросхему.
Благодаря присутствию гироскопа в мобильном телефоне, в том удалось реализовать функцию управления встряхиванием. Особенно полезным датчик является для реализации управления в играх, в частности гонках. При повороте экрана девайса осуществляется управление автотранспортом без необходимости нажатия на кнопки.
Отличие между гироскопом и акселерометромВесьма похожим устройством на гироскоп является акселерометр. Последний позволяет определять повороты тела относительно его оси. При этом функционал гороскопа гораздо обширнее.
При этом функционал гороскопа гораздо обширнее.
Он позволяет:
- Определить перемещение в пространстве.
- Указывать стороны света как компас.
- Дает информацию для расчета скорости движения.
Наличие гироскопа позволяет решать те задачи, которые мог бы выполнять акселерометр. При этом использование акселерометра никогда не позволит сделать все то, что возможно с помощью гироскопа. Несмотря на схожесть датчиков, они часто используются в паре, особенно в мобильной технике, смарт-часах, планшетах и т.д. Работая вместе, они позволяют значительно быстрее получать различную информацию по перемещению устройств, что увеличивает скорость ее обработки. Это важно для мобильных игр, квадрокоптеров, гироскутеров.
Похожие темы:
- Квантовый двигатель. Виды и устройство. Работа и применение
- Эффект Холла. Виды и применения. Работа и особенности
ГИРОСКОП • Большая российская энциклопедия
ГИРОСКО́П (от греч. γῦρος – круг, окружность и σϰοπέω – наблюдать), устройство, совершающее быстрые циклические (вращательные или колебательные) движения и чувствительное вследствие этого к повороту в инерциальном пространстве. Термин «Г.» предложен в 1852 Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «Г.» использовался для обозначения быстровращающегося симметричного твёрдого тела. В совр. технике Г. – осн. элемент всевозможных гироскопич. устройств или приборов, широко применяемых для автоматич. управления движением самолётов, судов, торпед, ракет, космич. аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Термин «Г.» предложен в 1852 Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «Г.» использовался для обозначения быстровращающегося симметричного твёрдого тела. В совр. технике Г. – осн. элемент всевозможных гироскопич. устройств или приборов, широко применяемых для автоматич. управления движением самолётов, судов, торпед, ракет, космич. аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Классический гироскоп
Согласно законам ньютоновской механики скорость поворота оси быстровращающегося симметричного твёрдого тела в пространстве обратно пропорциональна его собств. угловой скорости и, следовательно, ось Г. поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
угловой скорости и, следовательно, ось Г. поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
Рис. 1. Прецессия гироскопа. Угловая скорость прецессии 𝛚 направлена так, что вектор собственного кинетического момента H стремится к совмещению с вектором момента M пары сил {P, P’}, P’=–P, дей…
Рис. 2. Классический гироскоп в кардановом подвесе: 1 – внешнее кольцо; 2 – внутреннее кольцо; 3 – ротор.
Простейшим Г. является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения. Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией Г. Если к оси быстро вращающегося свободного Г. приложить пару сил $\{\boldsymbol P, \boldsymbol P′\}, \boldsymbol P′=– \boldsymbol P$, с моментом $M=Ph$, где $h$ – плечо пары сил (рис. 1), то (против ожидания) Г. начнёт дополнительно поворачиваться не вокруг оси $x$, перпендикулярной к плоскости пары сил, а вокруг оси $y$, лежащей в этой плоскости и перпендикулярной оси $z$ вращения Г. Если в к.-л. момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение Г. безынерционно. Чтобы ось Г. могла свободно поворачиваться в пространстве, Г. обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрич. шарнирами. Обычно при отсутствии технологич. погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса.
Если к оси быстро вращающегося свободного Г. приложить пару сил $\{\boldsymbol P, \boldsymbol P′\}, \boldsymbol P′=– \boldsymbol P$, с моментом $M=Ph$, где $h$ – плечо пары сил (рис. 1), то (против ожидания) Г. начнёт дополнительно поворачиваться не вокруг оси $x$, перпендикулярной к плоскости пары сил, а вокруг оси $y$, лежащей в этой плоскости и перпендикулярной оси $z$ вращения Г. Если в к.-л. момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение Г. безынерционно. Чтобы ось Г. могла свободно поворачиваться в пространстве, Г. обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрич. шарнирами. Обычно при отсутствии технологич. погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Г., у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классич. Г. – задача динамики твёрдого тела.
Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Г., у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классич. Г. – задача динамики твёрдого тела.
Осн. количественной характеристикой ротора механич. Г. является его вектор собств. кинетич. момента, называемого также моментом количества движения или моментом импульса, $$\boldsymbol H=I\boldsymbol{\Omega}, \,\,\,(1)$$где $I$ – момент инерции ротора Г. относительно оси собств. вращения, $\boldsymbol \Omega$ – угловая скорость собств. вращения Г. относительно оси симметрии.
Медленное движение вектора собств. кинетич. момента Г. под действием моментов внешних сил, называемое прецессией Г., описывается уравнением$$\boldsymbol {\omega} × \boldsymbol H=\boldsymbol M,\,\,\,(2)$$где $\boldsymbol \omega$ – вектор угловой скорости прецессии, $\boldsymbol H$ – вектор собств. кинетич. момента Г., $\boldsymbol M$ – ортогональная к $\boldsymbol H$ составляющая вектора момента внешних сил, приложенных к гироскопу.
кинетич. момента Г., $\boldsymbol M$ – ортогональная к $\boldsymbol H$ составляющая вектора момента внешних сил, приложенных к гироскопу.
Момент сил, приложенных со стороны ротора к подшипникам оси собств. вращения ротора, возникающий при изменении направления оси и определяемый уравнением$$\boldsymbol {M}_g=–\boldsymbol{M}=\boldsymbol H×\boldsymbol \omega,\,\,\,(3)$$называется гироскопич. моментом.
Кроме медленных прецессионных движений ось Г. может совершать быстрые колебания с малой амплитудой и высокой частотой – т. н. нутации. Для свободного Г. с динамически симметричным ротором в безынерционном подвесе частота нутационных колебаний определяется формулой $$ν=H/A,$$где $A$ – момент инерции ротора относительно оси, ортогональной оси собств. вращения и проходящей через центр масс ротора. При наличии сил трения нутационные колебания обычно достаточно быстро затухают.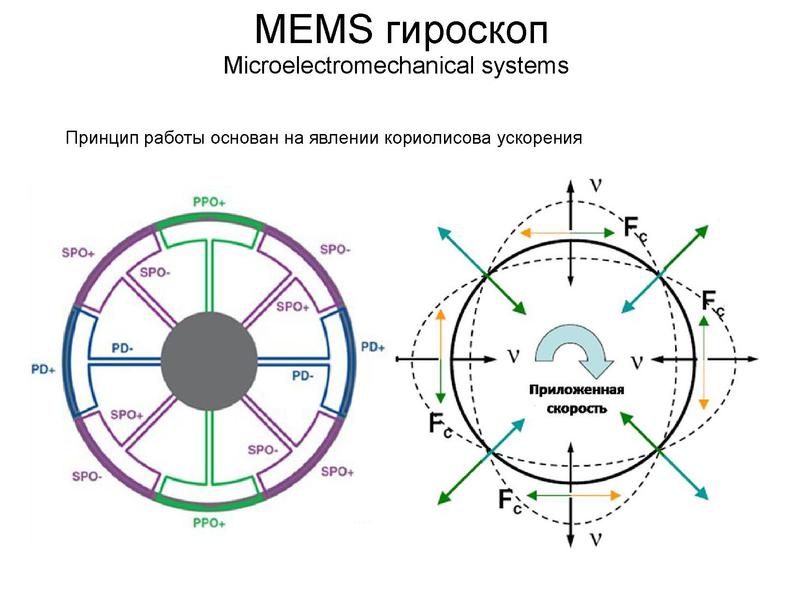
Погрешность Г. измеряется скоростью ухода его оси от первоначального положения. Согласно уравнению (2) величина ухода, называемого также дрейфом, пропорциональна моменту сил $M$ относительно центра подвеса Г.:$$ω_{yx}=M/H.\,\,\,(4)$$Уход $ω_{yx}$ обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный Г. функционирует идеально лишь в том случае, если внешний момент $M$ равен 0. При этом угловая скорость прецессии обращается в нуль и ось собств. вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Однако на практике любые средства, используемые для подвеса ротора Г., являются причиной возникновения нежелательных внешних моментов неизвестных величины и направления. Формула (4) определяет пути повышения точности механич. Г.: надо уменьшить «вредный» момент сил $M$ и увеличить кинетический момент $H$.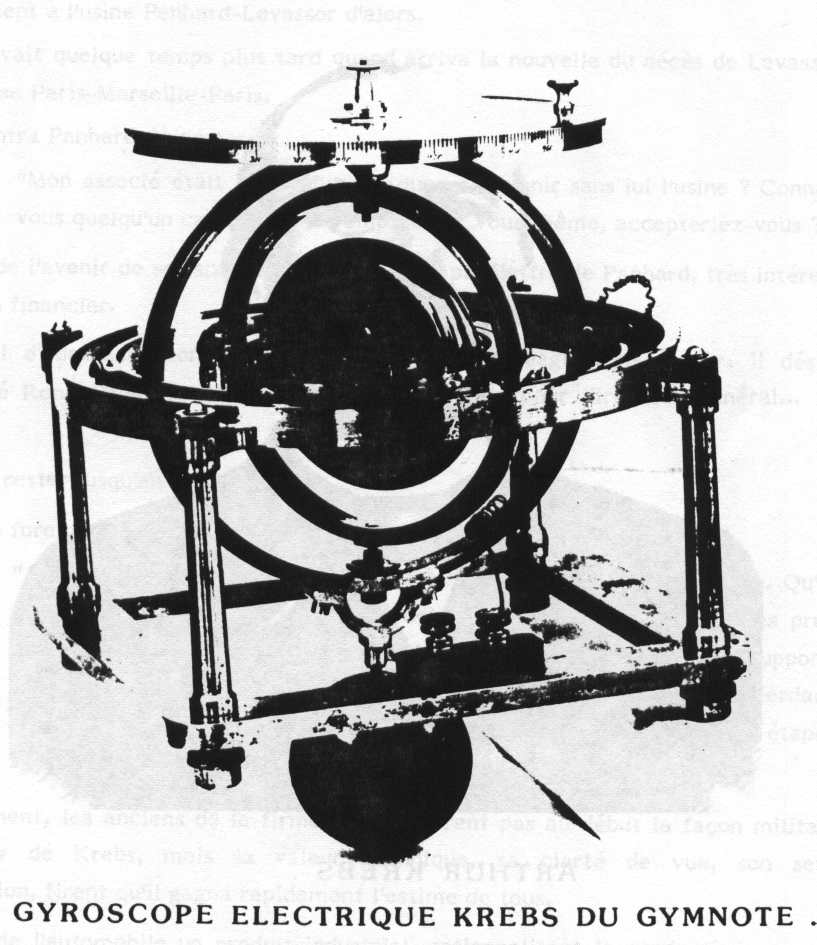 При выборе угловой скорости Г. необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше т. н. допускаемой угловой скорости начинается процесс его разрушения.
При выборе угловой скорости Г. необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше т. н. допускаемой угловой скорости начинается процесс его разрушения.
Лучшие совр. Г. имеют случайный уход порядка 10–4–10–5 °/ч. Ось Г. с погрешностью 10–5 °/ч совершает полный оборот на 360° за 4 тыс. лет! Точность балансировки Г. с погрешностью 10–5 °/ч должна быть выше одной десятитысячной доли микрометра (10–10 м), т. е. смещение центра масс ротора из центра подвеса не должно превышать величину порядка диаметра атома водорода.
Гироскопические устройства
можно разделить на силовые и измерительные. Силовые устройства служат для создания моментов сил, приложенных к основанию, на котором установлен гироскопич. прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и т. п.).
прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и т. п.).
Рис. 3. Авиационный гироуказатель курса с воздушным приводом: 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 &nd…
Впервые уравновешенный Г. нашёл практич. применение в 1898 в приборе для стабилизации курса торпеды, изобретённом австр. инженером Л. Обри. Аналогичные приборы в разл. вариантах исполнения начали использовать в 1920-х гг. на самолётах для указания курса (Г. направления, гирополукомпасы), а позднее для управления движением ракет. На рис. 3 показан пример применения гироскопа с тремя степенями свободы в авиац. указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создаётся и поддерживается струёй сжатого воздуха, направленной на рифлёную поверхность обода. По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собств. вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собств. вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
Гирогоризонт, или искусств. горизонт, позволяющий пилоту поддерживать свой самолёт в горизонтальном положении, когда естеств. горизонт не виден, основан на использовании Г. с вертикальной осью вращения, сохраняющей своё направление при наклонах самолёта. В автопилотах применяются два Г. с горизонтальной и вертикальной осями вращения; первый служит для сохранения курса самолёта и управляет вертикальными рулями, второй – для сохранения горизонтального положения самолёта и управляет горизонтальными рулями.
С помощью Г. созданы автономные инерциальные навигационные системы (ИНС), предназначенные для определения координат, скорости и ориентации подвижного объекта (корабля, самолёта, космич. аппарата и т. п.) без использования к.-л. внешней информации. В состав ИНС кроме Г. входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания Г. К нач. 21 в. созданы настолько точные ИНС, что дальнейшего повышения точностей для решения мн. задач уже не требуется.
Развитие гироскопич. техники последних десятилетий сосредоточилось на поиске нетрадиц. областей применения гироскопич. приборов – разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение координат ж.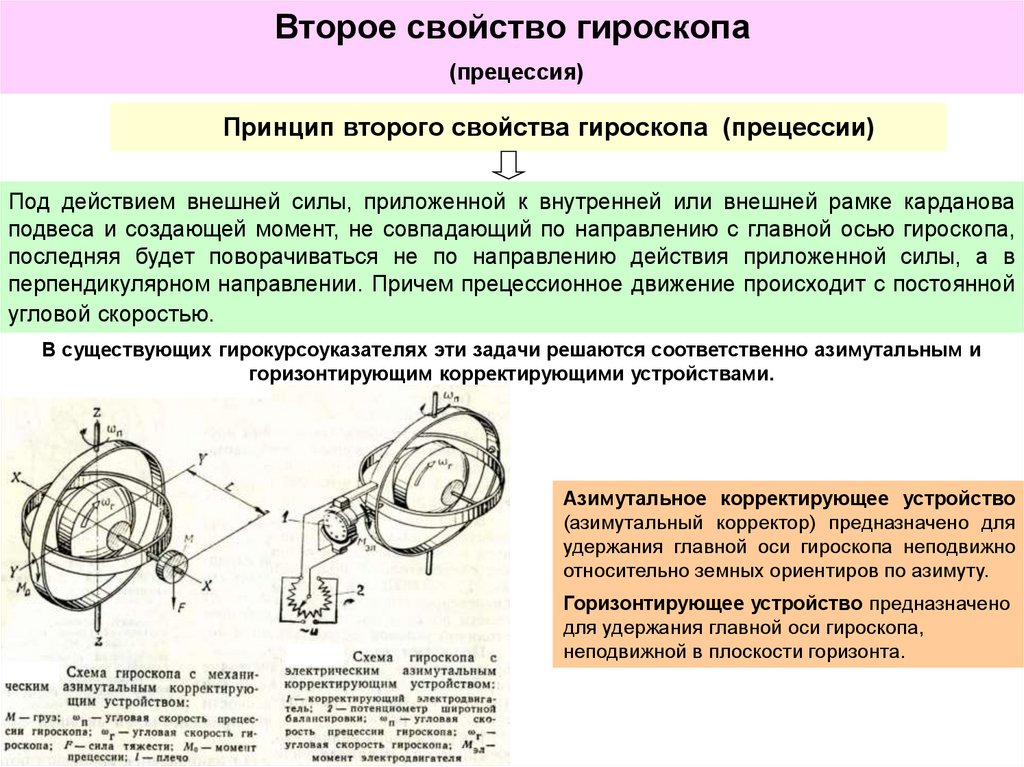 -д. путей и нефтепроводов, мед. техника и мн. другое.
-д. путей и нефтепроводов, мед. техника и мн. другое.
Неклассические виды гироскопов
Высокие требования к точности и эксплутационным характеристикам гироскопич. приборов привели не только к дальнейшим усовершенствованиям классич. Г. с вращающимся ротором, но и к поискам принципиально новых идей, позволяющих решить проблему создания чувствит. датчиков для индикации и измерения угловых движений объекта в пространстве. Этому способствовали успехи квантовой электроники, ядерной физики и др. областей точных наук.
В гироскопе с воздушной опорой шариковые подшипники, используемые в традиц. кардановом подвесе, заменены «газовой подушкой» (газодинамич. опорой). Это полностью устранило износ материала опор во время работы и позволило почти неограниченно увеличить время службы прибора. К недостаткам газовых опор относятся довольно большие потери энергии и возможность внезапного отказа при случайном контакте ротора с поверхностью опоры.
Поплавковый гироскоп представляет собой роторный Г., в котором для разгрузки подшипников подвеса все подвижные элементы взвешиваются в жидкости с большой плотностью так, чтобы вес ротора вместе с кожухом уравновешивался гидростатич. силами. Благодаря этому на много порядков снижается сухое трение в осях подвеса и увеличивается ударная и вибрац. стойкость прибора. Герметичный кожух, выполняющий роль внутр. рамки карданового подвеса, называется поплавком. Ротор Г. внутри поплавка вращается на возд. подушке в аэродинамич. подшипниках со скоростью порядка 30–60 тыс. оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый Г. с большим вязким трением жидкости называется также интегрирующим гироскопом.
Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 – ротор; 2 – внутреннее кольцо; 3 и 4 – торсионы; 5 – электродвигатель.
Динамически настраиваемый гироскоп (ДНГ) принадлежит к классу Г. с упругим подвесом ротора, в которых свобода угловых движений оси собств. вращения обеспечивается за счёт упругой податливости конструктивных элементов (напр., торсионов). В ДНГ, в отличие от классич. Г., используется т. н. внутр. карданов подвес (рис. 4), образованный внутр. кольцом 2, которое изнутри крепится торсионами 4 к валу электродвигателя 5, а снаружи – торсионами 3 к ротору 1. Момент трения в подвесе проявляется только в результате внутр. трения в материале упругих торсионов. В ДНГ за счёт подбора моментов инерции рамок подвеса и угловой скорости вращения ротора осуществляется компенсация упругих моментов подвеса, приложенных к ротору. К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфич. моментами трения, присутствующими в классич. кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
Кольцевой лазерный гироскоп (КЛГ), называемый также квантовым гироскопом, создан на основе лазера с кольцевым резонатором, в котором по замкнутому оптич. контуру одновременно распространяются встречные электромагнитные волны. К достоинствам КЛГ относятся отсутствие вращающегося ротора, подшипников, подверженных действию сил трения, высокая точность.
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, в котором распространяются встречные электромагнитные волны. ВОГ является аналоговым преобразователем угловой скорости вращения основания, на котором он установлен, в выходной электрич. сигнал.
Волновой твердотельный гироскоп (ВТГ) основан на использовании инертных свойств упругих волн в твёрдом теле. Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от темп-ры окружающей среды.
Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от темп-ры окружающей среды.
Вибрационный гироскоп (ВГ) основан на свойстве камертона сохранять плоскость колебаний своих ножек. В ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодич.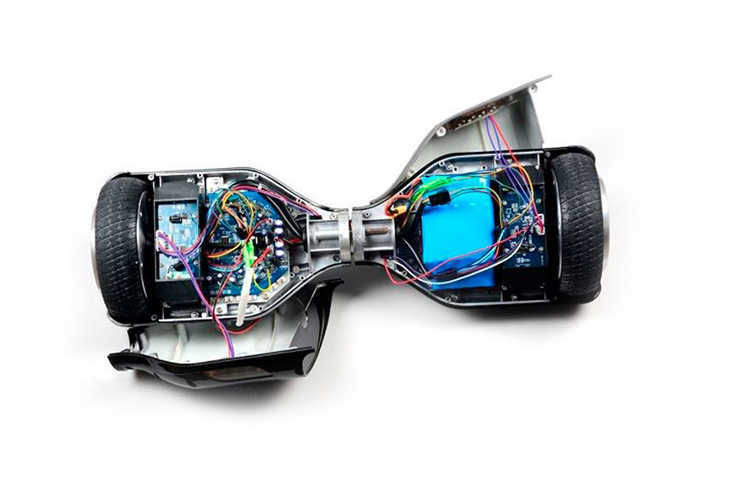 момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного Г. стимулировала целое направление поисков новых типов Г., использующих пьезоэлектрич. эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и т. п.
момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного Г. стимулировала целое направление поисков новых типов Г., использующих пьезоэлектрич. эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и т. п.
Микромеханический гироскоп (ММГ) относится к Г. низких точностей (ниже 10–1 °/ч). Эта область традиционно считалась малоперспективной для задач управления движущимися объектами и навигации.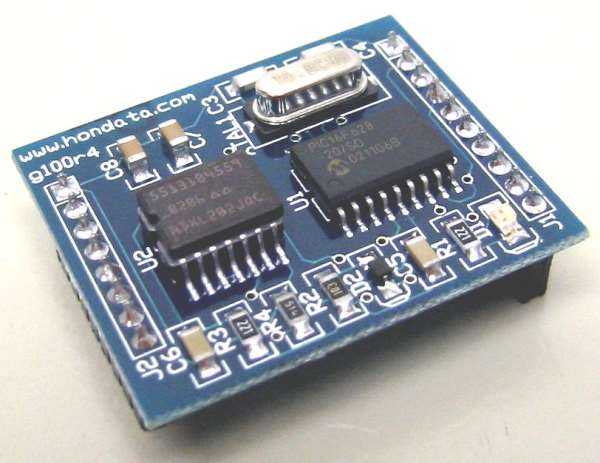 Но в кон. 20 в. разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопич. техники, тесно связанным с совр. кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в неск. квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность совр. ММГ невелика и достигает 101–102 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханич. чувствит. элементов. Благодаря использованию хорошо отработанных совр. технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнич. устройства и даже детские игрушки.
Но в кон. 20 в. разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопич. техники, тесно связанным с совр. кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в неск. квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность совр. ММГ невелика и достигает 101–102 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханич. чувствит. элементов. Благодаря использованию хорошо отработанных совр. технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнич. устройства и даже детские игрушки.
Неконтактный гироскоп относится к гироскопич. устройствам сверхвысоких точностей (10–6–5· 10–4 H /ч). Разработка Г. с неконтактными подвесами началась в сер. 20 в. В неконтактных подвесах реализуется состояние левитации, т. е. состояние, при котором ротор Г. «парит» в силовом поле подвеса без к.-л. механич. контакта с окружающими телами. Среди неконтактных Г. выделяют Г. с электростатич., магнитным и криогенным подвесами ротора. В электростатич. Г. проводящий бериллиевый сферич. ротор подвешен в вакуумированной полости в регулируемом электрич. поле, создаваемом системой электродов. В криогенном Г. сверхпроводящий ниобиевый сферич. ротор подвешен в магнитном поле; рабочий объём Г. охлаждается до сверхнизких темп-р, так, чтобы ротор перешёл в сверхпроводящее состояние. Г. с магниторезонансным подвесом ротора является аналогом Г. с электростатич. подвесом ротора, в котором электрич. поле заменено магнитным, а бериллиевый ротор – ферритовым. Совр. Г. с неконтактными подвесами – это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
с электростатич. подвесом ротора, в котором электрич. поле заменено магнитным, а бериллиевый ротор – ферритовым. Совр. Г. с неконтактными подвесами – это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
Кроме перечисленных выше типов Г. проводились и проводятся работы над экзотич. типами Г., такими, как ионный Г., ядерный гироскоп и др.
Математические задачи в теории гироскопа
Математич. основы теории Г. заложены Л. Эйлером в 1765 в его работе «Theoria motus corporum solidorum sue rigidorum». Движение классического Г. описывается системой дифференциальных уравнений 6-го порядка, решение которой стало одной из самых знаменитых математич. задач. Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классич. анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18–20 вв. Совр. гироскопич. приборы потребовали решения новых математич. задач. Движение неконтактных Г. с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения Г. с помощью компьютера, можно точно предсказывать положение оси Г. в пространстве. Благодаря этому разработчикам неконтактных Г. не приходится балансировать ротор с точностью 10–10 м, которую невозможно достичь при совр. уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного Г. и вводить соответствующие поправки в программы обработки сигналов Г. Получающиеся с учётом этих поправок уравнения движения Г. оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики.
Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18–20 вв. Совр. гироскопич. приборы потребовали решения новых математич. задач. Движение неконтактных Г. с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения Г. с помощью компьютера, можно точно предсказывать положение оси Г. в пространстве. Благодаря этому разработчикам неконтактных Г. не приходится балансировать ротор с точностью 10–10 м, которую невозможно достичь при совр. уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного Г. и вводить соответствующие поправки в программы обработки сигналов Г. Получающиеся с учётом этих поправок уравнения движения Г. оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики.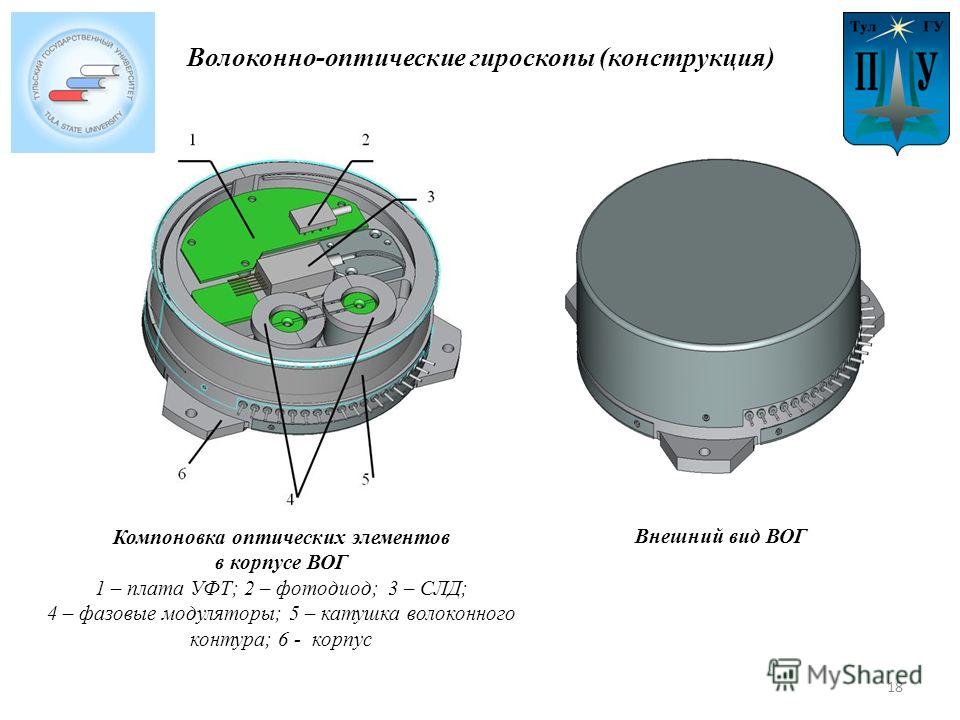 Разработка программ расчёта движения Г. с неконтактными подвесами позволяет существенно повысить точность Г., а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
Разработка программ расчёта движения Г. с неконтактными подвесами позволяет существенно повысить точность Г., а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
2.1 Применение гироскопов в технике. Механические гироскопы
Механические гироскопы
курсовая работа
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы. Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами. Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы. Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента. Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас), так и в системах ориентации и стабилизации космических аппаратов.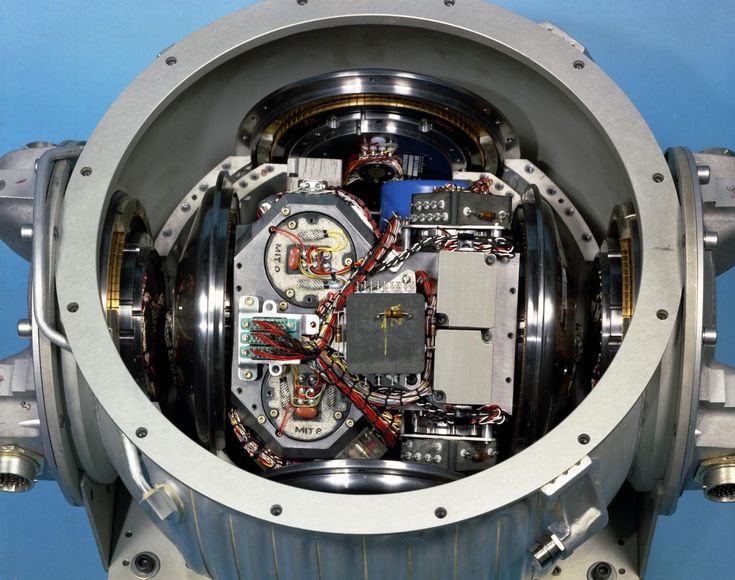 При использовании в гировертикали показания гироскопа должны корректироваться маятником, так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп.
При использовании в гировертикали показания гироскопа должны корректироваться маятником, так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп.
Рисунок 2.1. – Схема простейшего механического гироскопа в карданном подвесе
Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит «авторулевой», а самолета – «автопилот». .В приборе «авторулевой» применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
«Автопилот» снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно “знает” курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу.В настоящее время автопилотами оборудованы все современные самолеты, предназначенные для длительных полетов. Гироскоп служит важной составной частью в системах управления космических аппаратов.
Гироскопы применяют так же в системах навигации. Инерциальная навигация относится к такому способу определения местоположения в пространстве, при котором не используются данные каких-либо внешних источников.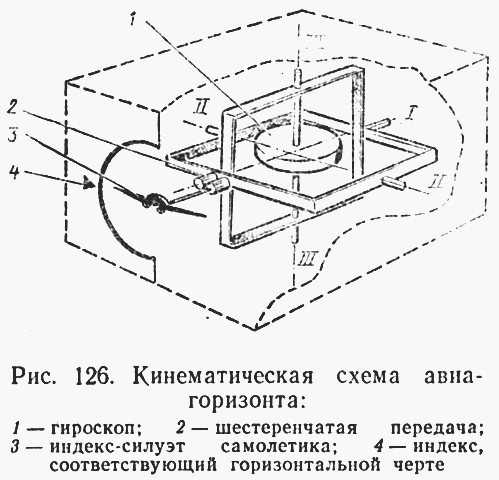 Все чувствительные элементы находятся непосредственно на борту транспортного средства. Инерциальные измерители линейных ускорений – акселерометры установлены на так называемой гиростабилизированной платформе. Эта платформа, используя свойства гироскопа – сохранять неизменной ориентацию своей оси в пространстве, обеспечивает строго горизонтальное положение осей чувствительности акселерометров. Измеренные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта. Объединенные общей задачей определения координат подвижного объекта, гироскопы и акселерометры образуют инерциальную навигационную систему . Помимо этой задачи она поставляет информацию об угловой ориентации объекта: углах крена, тангажа и рыскания и о скорости объекта.
Все чувствительные элементы находятся непосредственно на борту транспортного средства. Инерциальные измерители линейных ускорений – акселерометры установлены на так называемой гиростабилизированной платформе. Эта платформа, используя свойства гироскопа – сохранять неизменной ориентацию своей оси в пространстве, обеспечивает строго горизонтальное положение осей чувствительности акселерометров. Измеренные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта. Объединенные общей задачей определения координат подвижного объекта, гироскопы и акселерометры образуют инерциальную навигационную систему . Помимо этой задачи она поставляет информацию об угловой ориентации объекта: углах крена, тангажа и рыскания и о скорости объекта.
Конструкция современной инерциальной навигационной системе вобрала в себя последние достижения точной механики, теории автоматического управления, электроники и вычислительной техники. Конструктивно инерциальную навигационную систему можно разделить на два класса: платформенные и бескарданные. В первых гиростабилизированная платформа реализована физически в виде рамы трехстепенного карданного подвеса. В таких системах используются традиционные гироскопы с вращающимся ротором. Эти системы входят в состав бортового навигационного оборудования тяжелых самолетов.
В первых гиростабилизированная платформа реализована физически в виде рамы трехстепенного карданного подвеса. В таких системах используются традиционные гироскопы с вращающимся ротором. Эти системы входят в состав бортового навигационного оборудования тяжелых самолетов.
Другой класс – бесплатформенные отличаются тем, что плоскость горизонта в них реализована математически, используя данные гироскопов и акселерометров. В этих системах могут быть использованы лазерные и волоконно-оптические гироскопы. Здесь нет вращающихся частей, а об угловой скорости судят по фазовой задержке лазерного луча пробегающего по замкнутому контуру. Они существенно конструктивно проще и дешевле платформенных.Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.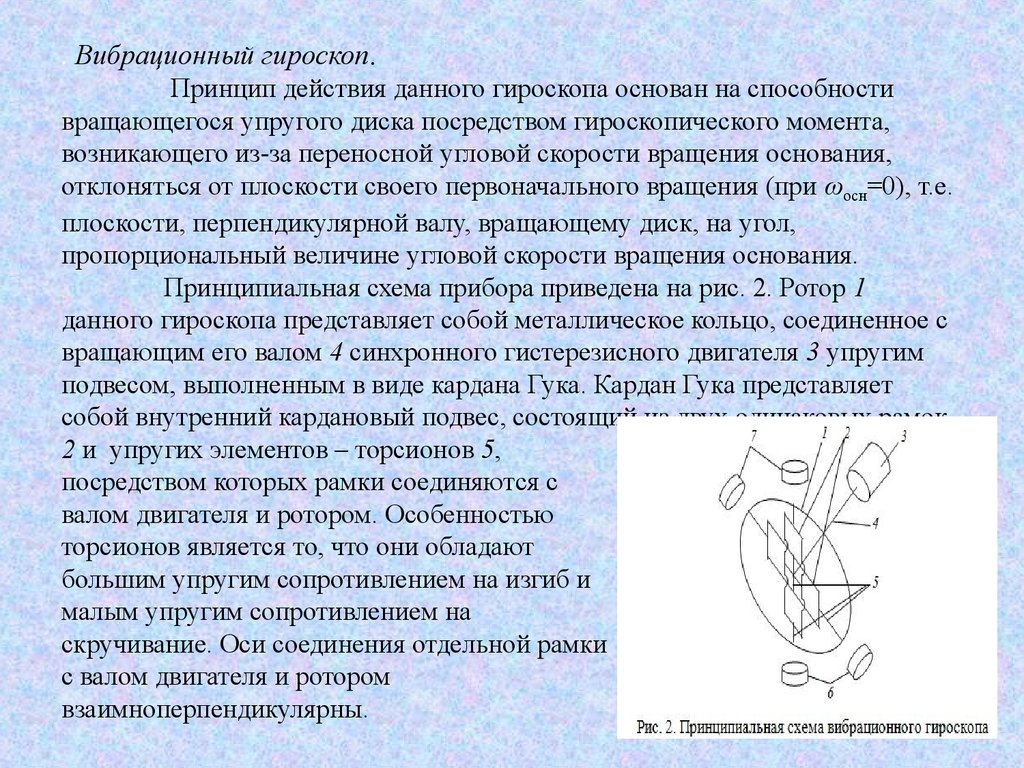
Делись добром 😉
Исследование текстильных материалов к действию светопогоды
2.2. ИНСТРУКЦИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ И ПРОТИВОПОЖАРНОЙ ТЕХНИКЕ В ЛАБОРАТОРИИ
1. Во избежание несчастных случаев в лаборатории студент должен знать следующее: а) вращающиеся детали испытательных машин могут нанести ушибы, переломы и другие травмы; б) действие электрического тока может вызвать ожог…
Механические гироскопы
2.4 Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором…
Проект отделения РМЗ по ремонту автомобильных рам. Годовая программа РМЗ 2000 капитальных ремонтов автомобилей ЗИЛ-131
4.1 Мероприятия по технике безопасности
Организация работ, устройство, размещение и эксплуатация оборудования должны соответствовать правилам техники безопасности и производственной санитарии в отделении по ремонту рам. ..
..
Проектирование и расчет лесопильного цеха
6. МЕРОПРИЯТИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ И ПРОТИВОПОЖАРНОЙ ТЕХНИКЕ
Под техникой безопасности подразумевается комплекс мероприятий технического и организационного характера, направленных на создание безопасных условий труда и предотвращение несчастных случаев на производстве…
Проектирование одноступенчатого редуктора
7. Требования по технике безопасности
Для предотвращения преждевременного выхода из строя и безопасности рабочих необходимо: 1.заземлить электродвигатель. 2.использовать защитный кожух для муфты…
Разработка технологии и режимов сварки
8. Мероприятия по технике безопасности
Сварщики могут быть допущены только к тем работам, которые указаны в удостоверении. К выполнению сварочных работ допускаются сварщики…
Разработка технологии и режимов сварки изделия “Грязевик вертикальный”
8. Мероприятия по технике безопасности
Сварщики могут быть допущены только к тем работам, которые указаны в удостоверении. К выполнению сварочных работ допускаются сварщики…
К выполнению сварочных работ допускаются сварщики…
Разработка технологического процесса изготовления отливки “Опора” 8ТС 043051 из стали 25Л ГОСТ 977-88
8. Основные мероприятия по технике безопасности, противопожарной технике и охране окружающей среды
Основными вредными производственными факторами в литейных цехах являются пыль, выделяющиеся пары и газы, электромагнитное излучение, избыточная теплота, повышенный уровень шума и вибрации, движущиеся машины и механизмы…
Разработка технологического процесса механической обработки деталей узла “Парораспределения 112-Б-0474”
3.2 Мероприятия по технике безопасности, противопожарной технике на участке, охране окружающей среды, природоохранительные меры
Основные значения техники безопасности – обеспечение безопасности и безвредности труда без снижения его производительности. Осуществление этих требований сводится к проведению комплекса мероприятий…
Расчет устойчивости башенного крана
6.
 Мероприятия по технике безопасности
Мероприятия по технике безопасностиПеред началом работы на башенном кране машинист обязан ознакомиться с записями о состоянии крана, сделанными его сменщиком в журнале приема и сдачи смены, а затем и лично убедиться в полной исправности крана…
Сегнетоэлектрики – структура свойства и применение
6.4 Применение в вычислительной технике
В адресных регистрах вычислительных машин многократно используются переключатели, с помощью которых производится выбор требуемой ячейки памяти…
Структура и особенности деятельности государственного унитарного дорожного предприятия “Асфальт-2”
1. Инструктаж по технике безопасности
…
Фасовочно-упаковочный автомат, аналогичный модели АРМ-18,5
6. Мероприятия по технике безопасности
К работе на автомате допускаются лица, прошедшие обучение по его эксплуатации.
Необходимо соблюдать следующие правила:
– содержать в чистоте рабочее место, наружную поверхность автомата и его рабочие органы…
Череповецкий металлургический комбинат в России
3.1 Описание основных мероприятий по технике безопасности и противопожарной технике на участке при эксплуатации реконструируемого механизма и ремонте оборудования
Порядок обеспечения требований охраны труда, пожарной и промышленной безопасности, установленных законодательством России…
Электронно-лучевая сварка деталей гироскопа
2.2 Классификация гироскопов
Основные типы гироскопов по количеству степеней свободы: 2-степенные, 3-степенные на рис. 2.2 . Основные два типа гироскопов по принципу действия: механические гироскопы, оптические гироскопы…
Для чего используются гироскопы?
Гироскоп, который часто называют просто гироскопом (не путать с греческой пищевой пленкой), не получает широкого распространения в прессе. Но без этого чуда инженерной мысли мир — и особенно исследование человечеством других миров — был бы принципиально другим. Гироскопы незаменимы в ракетостроении и воздухоплавании, а в качестве бонуса простой гироскоп может стать отличной детской игрушкой.-450.jpg)
Гироскоп, хотя и машина с большим количеством движущихся частей, на самом деле является датчиком. Его цель состоит в том, чтобы поддерживать устойчивое движение вращающейся части в центре гироскопа перед лицом изменений сил, накладываемых внешней средой гироскопа. Они устроены так, что эти внешние смещения уравновешиваются движениями частей гироскопа, которые всегда противодействуют наложенному сдвигу. Это мало чем отличается от того, как подпружиненная дверь или мышеловка будут сопротивляться вашим попыткам открыть ее, тем сильнее, чем больше будут ваши собственные усилия. Однако гироскоп гораздо сложнее пружины.
Почему вы наклоняетесь влево, когда машина поворачивает направо?
Что значит испытать «внешнюю силу», то есть подвергнуться действию новой силы, когда на самом деле тебя не касается ничего нового? Подумайте, что происходит, когда вы находитесь на пассажирском сиденье автомобиля, который движется по прямой с постоянной скоростью. Поскольку автомобиль не ускоряется и не замедляется, ваше тело не испытывает линейного ускорения, а поскольку автомобиль не поворачивает, вы не испытываете углового ускорения. Поскольку сила является произведением массы и ускорения, в этих условиях вы не испытываете результирующей силы, даже если движетесь со скоростью 200 миль в час. Это соответствует первому закону движения Ньютона, который гласит, что объект, находящийся в состоянии покоя, останется в покое, если на него не подействуют внешние силы, а также что объект, движущийся с постоянной скоростью в том же направлении, будет продолжать двигаться точно по своей траектории, если только подвергается внешней силе.
Поскольку автомобиль не ускоряется и не замедляется, ваше тело не испытывает линейного ускорения, а поскольку автомобиль не поворачивает, вы не испытываете углового ускорения. Поскольку сила является произведением массы и ускорения, в этих условиях вы не испытываете результирующей силы, даже если движетесь со скоростью 200 миль в час. Это соответствует первому закону движения Ньютона, который гласит, что объект, находящийся в состоянии покоя, останется в покое, если на него не подействуют внешние силы, а также что объект, движущийся с постоянной скоростью в том же направлении, будет продолжать двигаться точно по своей траектории, если только подвергается внешней силе.
Однако, когда автомобиль поворачивает направо, если вы не приложите физических усилий, чтобы противодействовать внезапному введению углового ускорения в вашу поездку, вы опрокинетесь на водителя слева от вас. Вы перешли от отсутствия результирующей силы к испытанию силы, направленной прямо из центра круга, который машина только начала очерчивать. Поскольку более короткие повороты приводят к большему угловому ускорению при заданной линейной скорости, ваша склонность к наклону влево более выражена, когда ваш водитель делает крутой поворот.
Поскольку более короткие повороты приводят к большему угловому ускорению при заданной линейной скорости, ваша склонность к наклону влево более выражена, когда ваш водитель делает крутой поворот.
Ваша собственная, социально укоренившаяся практика применения достаточного усилия против наклона, чтобы оставаться в том же положении на своем месте, аналогична тому, что делают гироскопы, хотя и гораздо более сложным и эффективным способом.
Происхождение гироскопа
Формально гироскоп восходит к середине 19 века и французскому физику Леону Фуко. Фуко, возможно, более известен благодаря маятнику, названному его именем и проделавшему большую часть его работы в области оптики, но он придумал устройство, которое он использовал для демонстрации вращения Земли, найдя способ фактически компенсировать или изолировать воздействие гравитации на самые внутренние части устройства. Это означало, что любое изменение оси вращения колеса гироскопа во время его вращения должно было быть вызвано вращением Земли. Так развернулось первое формальное использование гироскопа.
Так развернулось первое формальное использование гироскопа.
Что такое гироскопы?
Основной принцип работы гироскопа можно проиллюстрировать на отдельном вращающемся велосипедном колесе. Если бы вы удерживали колесо с каждой стороны за короткую ось, проходящую через середину колеса (например, ручку), и кто-то вращал колесо, пока вы его держали, вы бы заметили, что если вы попытаетесь наклонить колесо в одну сторону , он не двигался бы в этом направлении так легко, как если бы не вращался. Это верно для любого направления по вашему выбору и независимо от того, насколько внезапно вводится движение.
Пожалуй, проще всего описать части гироскопа от самых внутренних до самых внешних. Во-первых, в центре находится вращающийся вал или диск (а если подумать, с геометрической точки зрения диск — это не что иное, как очень короткий и очень широкий вал). Это самая тяжелая часть аранжировки. Ось, проходящая через центр диска, прикреплена шарикоподшипниками почти без трения к круглому обручу, называемому карданом. Здесь история становится странной и очень интересной. Сам этот карданный вал прикреплен аналогичными шарикоподшипниками к другому карданный вал, который чуть шире, так что внутренний карданный вал может просто свободно вращаться в пределах внешнего. Точки крепления карданов друг к другу расположены по линии, перпендикулярной оси вращения центрального диска. Наконец, внешний карданный вал прикреплен еще более плавно скользящими шарикоподшипниками к третьему кольцу, которое служит рамой гироскопа.
Здесь история становится странной и очень интересной. Сам этот карданный вал прикреплен аналогичными шарикоподшипниками к другому карданный вал, который чуть шире, так что внутренний карданный вал может просто свободно вращаться в пределах внешнего. Точки крепления карданов друг к другу расположены по линии, перпендикулярной оси вращения центрального диска. Наконец, внешний карданный вал прикреплен еще более плавно скользящими шарикоподшипниками к третьему кольцу, которое служит рамой гироскопа.
(Вам следует обратиться к схеме гироскопа или просмотреть короткие видеоролики в Ресурсах, если вы еще этого не сделали; иначе все это почти невозможно визуализировать!)
Ключ к функции гироскопа заключается в том, что три взаимосвязанных, но независимо вращающихся шарнира позволяют двигаться в трех плоскостях или измерениях. Если бы что-то потенциально могло нарушить ось вращения внутреннего вала, этому возмущению можно было бы противостоять одновременно во всех трех измерениях, потому что кардан «поглощает» силу скоординированным образом. По сути, происходит то, что когда два внутренних кольца вращаются в ответ на любое возмущение, которое испытал гироскоп, их соответствующие оси вращения лежат в плоскости, которая остается перпендикулярной оси вращения вала. Если эта плоскость не меняется, то и направление вала не меняется.
По сути, происходит то, что когда два внутренних кольца вращаются в ответ на любое возмущение, которое испытал гироскоп, их соответствующие оси вращения лежат в плоскости, которая остается перпендикулярной оси вращения вала. Если эта плоскость не меняется, то и направление вала не меняется.
Физика гироскопа
Крутящий момент — это сила, приложенная вокруг оси вращения, а не прямо. Таким образом, он влияет на вращательное движение, а не на линейное движение. В стандартных единицах это сила, умноженная на «плечо рычага» (расстояние от реального или гипотетического центра вращения; подумайте о «радиусе»). Поэтому он имеет единицы Н⋅м.
Гироскоп в действии перераспределяет любые приложенные крутящие моменты таким образом, чтобы они не влияли на движение центрального вала. Здесь важно отметить, что гироскоп не предназначен для того, чтобы что-то двигалось по прямой; это предназначено для того, чтобы что-то двигалось с постоянной скоростью вращения . Если подумать, вы, вероятно, можете себе представить, что космические корабли, летящие на Луну или в более отдаленные места назначения, не идут из точки в точку; скорее, они используют гравитацию, создаваемую различными телами, и движутся по траекториям или кривым. Хитрость заключается в том, чтобы параметры этой кривой оставались постоянными.
Если подумать, вы, вероятно, можете себе представить, что космические корабли, летящие на Луну или в более отдаленные места назначения, не идут из точки в точку; скорее, они используют гравитацию, создаваемую различными телами, и движутся по траекториям или кривым. Хитрость заключается в том, чтобы параметры этой кривой оставались постоянными.
Выше было отмечено, что вал или диск, образующие центр гироскопа, имеют тенденцию быть тяжелыми. Он также имеет тенденцию вращаться с необычайной скоростью — гироскопы на телескопе Хаббл, например, вращаются со скоростью 19200 оборотов в минуту или 320 в секунду. На первый взгляд кажется абсурдным, что ученые оснастили такой чувствительный инструмент безрассудно вращающимся (буквально) компонентом посередине. Вместо этого, конечно, это стратегическое. Импульс в физике — это просто произведение массы на скорость. Соответственно, угловой момент равен инерции (величина, включающая массу, как вы увидите ниже) умноженной на угловую скорость. В результате, чем быстрее вращается колесо и чем больше его инерция за счет большей массы, тем большим угловым моментом обладает вал. В результате кардан и внешние компоненты гироскопа обладают высокой способностью подавлять воздействие внешнего крутящего момента до того, как этот крутящий момент достигнет уровней, достаточных для нарушения ориентации вала в пространстве.
В результате, чем быстрее вращается колесо и чем больше его инерция за счет большей массы, тем большим угловым моментом обладает вал. В результате кардан и внешние компоненты гироскопа обладают высокой способностью подавлять воздействие внешнего крутящего момента до того, как этот крутящий момент достигнет уровней, достаточных для нарушения ориентации вала в пространстве.
Пример элитных гироскопов: телескоп «Хаббл»
Знаменитый телескоп «Хаббл» содержит шесть различных гироскопов для навигации, которые периодически необходимо заменять. Ошеломляющая скорость вращения его ротора означает, что шариковые подшипники непрактичны или невозможны для гироскопа такого калибра. Вместо этого Хаббл использует гироскопы, содержащие газовые подшипники, которые обеспечивают настолько близкое к настоящему вращению без трения, что может похвастаться что-либо, созданное людьми.
Почему первый закон Ньютона иногда называют «законом инерции»
Инерция — это сопротивление изменениям скорости и направления, какими бы они ни были. Это непрофессиональная версия официальной декларации, изложенной Исааком Ньютоном столетия назад.
Это непрофессиональная версия официальной декларации, изложенной Исааком Ньютоном столетия назад.
В повседневном языке «инерция» обычно означает нежелание двигаться, например: «Я собирался косить газон, но инерция прижала меня к дивану». Однако было бы странно видеть, как кто-то, только что достигший конца 26,2-мильного марафона, отказывается остановиться из-за эффектов инерции, хотя с точки зрения физики использование термина здесь было бы в равной степени допустимо — если бы бегун продолжал бежать в том же направлении и с той же скоростью, технически это было бы действием инерции. И вы можете представить ситуации, в которых люди действительно говорят, что не смогли прекратить что-то делать из-за инерции, например: «Я собирался уйти из казино, но по инерции я ходил от стола к столу». (В этом случае «импульс» может быть лучше, но только если игрок выигрывает!)
Является ли инерция силой?
Уравнение для углового момента:
L = Iω
Где L измеряется в кг ⋅ м 2 /с. Поскольку единицами измерения угловой скорости ω являются обратные секунды, или с-1, I, инерция, измеряется в кг ⋅ м 2 . Стандартная единица силы, ньютон, делится на кг ⋅ м/с 2 . Таким образом, инерция не является силой. Это не помешало фразе «сила инерции» войти в обиход, как это происходит с другими вещами, которые «ощущаются» как силы (хорошим примером является давление).
Поскольку единицами измерения угловой скорости ω являются обратные секунды, или с-1, I, инерция, измеряется в кг ⋅ м 2 . Стандартная единица силы, ньютон, делится на кг ⋅ м/с 2 . Таким образом, инерция не является силой. Это не помешало фразе «сила инерции» войти в обиход, как это происходит с другими вещами, которые «ощущаются» как силы (хорошим примером является давление).
Примечание: Хотя масса не является силой, вес является силой, несмотря на то, что эти два термина взаимозаменяемы в повседневной жизни. Это связано с тем, что вес является функцией гравитации, и поскольку мало кто покидает Землю надолго, вес объектов на Земле фактически постоянен, так же как их массы буквально постоянны.
Что измеряет акселерометр?
Акселерометр, как следует из названия, измеряет ускорение, но только линейное ускорение. Это означает, что эти устройства не особенно полезны во многих приложениях трехмерных гироскопов, хотя они удобны в ситуациях, когда направление движения может быть принято только в одном измерении (например, типичный лифт).
Акселерометр — это один из типов инерциальных датчиков. Гироскоп — это другое, за исключением того, что гироскоп измеряет угловое ускорение. И хотя это выходит за рамки этой темы, магнитометр — это третий тип инерциального датчика, который используется для магнитных полей. Продукты виртуальной реальности (VR) включают в себя эти инерциальные датчики в сочетании, чтобы создавать более надежные и реалистичные впечатления для пользователей.
|
| ||||||||||||||||||||||||||||||||||||
 Таким образом, вращающийся гироскоп может свободно перемещаться в пространстве с помощью несущей рамы, не нарушая плоскости вращения ротора.
Таким образом, вращающийся гироскоп может свободно перемещаться в пространстве с помощью несущей рамы, не нарушая плоскости вращения ротора.


Какие бывают датчики гироскопа и как работают гироскопы?
Различные типы гироскопических датчиков (MEMS, кольцевой лазерный гироскоп, оптический и механический гироскоп) имеют разные сценарии применения. В этой статье рассматриваются различные типы гироскопических датчиков, их работа и применение.
В этой статье рассматриваются различные типы гироскопических датчиков, их работа и применение.
Содержание
- Что такое гироскоп?
- Типы гироскопов
- Применение гироскопов
Что такое гироскоп?
A Гироскоп — это устройство, которое измеряет или поддерживает ориентацию и угловую скорость вращающегося тела за счет использования сил гравитации Земли.
У них есть приложения в навигационных устройствах. В этой статье мы обсудим различные типы гироскопов, как работают гироскопы? и их применения. Мы предлагаем вам также прочитать эту статью о различных типах датчиков и их применении.
Типы гироскопов
Следующие типы гироскопов используются в различных изделиях для измерения или управления вращательным движением тела:
- Механические гироскопы
- МЭМС-гироскопы
- Кольцевые лазерные гироскопы
- Оптические гироскопы
Мы подробно обсудим работу и применение рассмотренных выше гироскопов.
1. Механический гироскоп
Механические гироскопы являются старейшим типом гироскопов. Они используют гравитационное притяжение, чтобы получить необходимую стабильность и движение в теле. Нажмите здесь, чтобы купить механический гироскоп на Amazon.
Что такое механический гироскоп?
Конструкция гироскопаКак показано на изображении выше, Механический гироскоп состоит из свободно вращающегося диска, установленного на карданном подвесе.
Этот вращающийся диск создает гироскопические силы, препятствующие любому изменению оси вращающегося диска. Эти гироскопические силы в механическом гироскопе обеспечивают стабильность и сохраняют направление движущихся объектов.
Как работает механический гироскоп?
Вращающийся диск в гироскопе создает гироскопические силы в направлении оси вращения. Эти силы сопротивляются любому изменению оси.
Как показано на анимации выше, независимо от движения внешней рамки гироскопа, вращающиеся диски продолжают вращаться вокруг одной и той же оси. Это гироскопическое явление находит применение в стабилизации больших движущихся объектов.
Это гироскопическое явление находит применение в стабилизации больших движущихся объектов.
Для стабилизации внешнего каркаса гироскопа крепится к движущемуся объекту. И диск вращается в соответствии с необходимыми стабилизирующими силами.
Мы можем больше узнать о работе механических гироскопов , связав их с явлением, известным как Прецессия . И чтобы понять Прецессия, , давайте сначала поймем Что такое правило большого пальца правой руки?
Правило большого пальца правой руки
Правило большого пальца правой руки определяет направление угловой скорости и углового момента вращающегося диска вокруг своей оси. Согласно правилу правой руки, когда мы сгибаем пальцы в направлении вращения диска, направление большого пальца определяет направление угловой скорости и углового момента.
Например, угловая скорость действует в направлении вверх, когда диск вращается против часовой стрелки. Давайте воспользуемся этим правилом большого пальца правой руки, чтобы понять, что такое прецессия?
Давайте воспользуемся этим правилом большого пальца правой руки, чтобы понять, что такое прецессия?
Что такое прецессия?
Прецессия — изменение ориентации свободно вращающегося колеса под действием гироскопических сил, действующих на вращающееся колесо при приложении внешней силы.
Попробуем разобраться в явлении прецессии и как оно связано с гироскопическими силами на примере прялки?
Крутящий момент, действующий на вращающийся диск из-за прецессииВращающееся колесо создает крутящий момент, перпендикулярный приложенной силе и оси вращения, когда внешняя сила прикладывается к валу вращающегося колеса перпендикулярно оси вращения колеса.
Из-за этого крутящего момента начинает меняться ориентация вращающегося колеса. Это явление изменения ориентации вращающегося колеса известно как прецессия. Поэтому прецессия происходит за счет гироскопической силы, противодействующей любому изменению оси прялки.
Мы можем использовать правило правой руки, чтобы определить направление и ось изменения ориентации вращающегося колеса или прецессии. Это свойство гироскопа находит применение в стабилизации летательных аппаратов.
2. Гироскоп MEMS
Гироскопы MEMS (Micro-Electro-Mechanical-Systems) — это гироскопические датчики очень миниатюрного размера, широко используемые в электронных устройствах. Они используют вибрирующий элемент для определения угловой скорости вращающегося тела.
По сравнению с механическими гироскопами , МЭМС-гироскопы не стабилизируют движущиеся тела. Эти датчики гироскопа MEMS рассчитывают угловую скорость в любом из трех направлений.
Гироскопические датчики МЭМС-типа применяются только для расчета небольшого числа оборотов, таких как рысканье и тангаж свободно движущегося тела. Вы не можете использовать их для определения угловой скорости вращающихся валов
Как работает МЭМС-гироскоп?
Конструкция МЭМС-гироскопов МЭМС-гироскопы состоят из резонирующей структуры или системы пружины и массы небольшого размера ((100 микрон). Она состоит из пружины, демпфера и резонирующей массы.
Она состоит из пружины, демпфера и резонирующей массы.
При вращении гироскопа резонирует
После этого микроконтроллер или процессор обрабатывает этот ток для измерения движения, поэтому чувствительность МЭМС-гироскопа прямо пропорциональна движению резонирующей массы. к колеблющейся массе
3. Кольцевой лазерный гироскоп
Аналогично оптическому гироскопу, кольцевой лазерный гироскоп вычисляет вращательное движение с использованием Кольцевые лазерные гироскопы работают, перемещая световые импульсы по часовой стрелке и против часовой стрелки внутри катушек оптического волокна.
Разница в частоте света в двух направлениях измеряется с помощью подсчета интерференционных полос для расчета вращения.
4. Оптические гироскопы
Гироскопы MEMS (микроэлектромеханические системы) — это очень миниатюрные гироскопические датчики, широко используемые в электронных устройствах. Они используют вибрирующий элемент для определения угловой скорости вращающегося тела.
Они используют вибрирующий элемент для определения угловой скорости вращающегося тела.
По сравнению с механическими гироскопами , МЭМС-гироскопы не стабилизируют движущиеся тела. Эти датчики гироскопа MEMS рассчитывают угловую скорость в любом из трех направлений.
Гироскопические датчики МЭМС-типа применяются только для расчета небольшого числа оборотов, таких как рысканье и тангаж свободно движущегося тела. Их нельзя использовать для определения угловой скорости вращающихся валов.
Гироскопы применяются для расчета и контроля положения тела относительно тела. опорная плоскость в трехмерном пространстве. Ниже приведены применения гироскопа в различных отраслях промышленности:
1. Навигационные компасы
Механические гироскопические компасы широко используются на больших кораблях для определения фактического северного положения. Гирокомпас определяет направление на север, учитывая ось вращения Земли.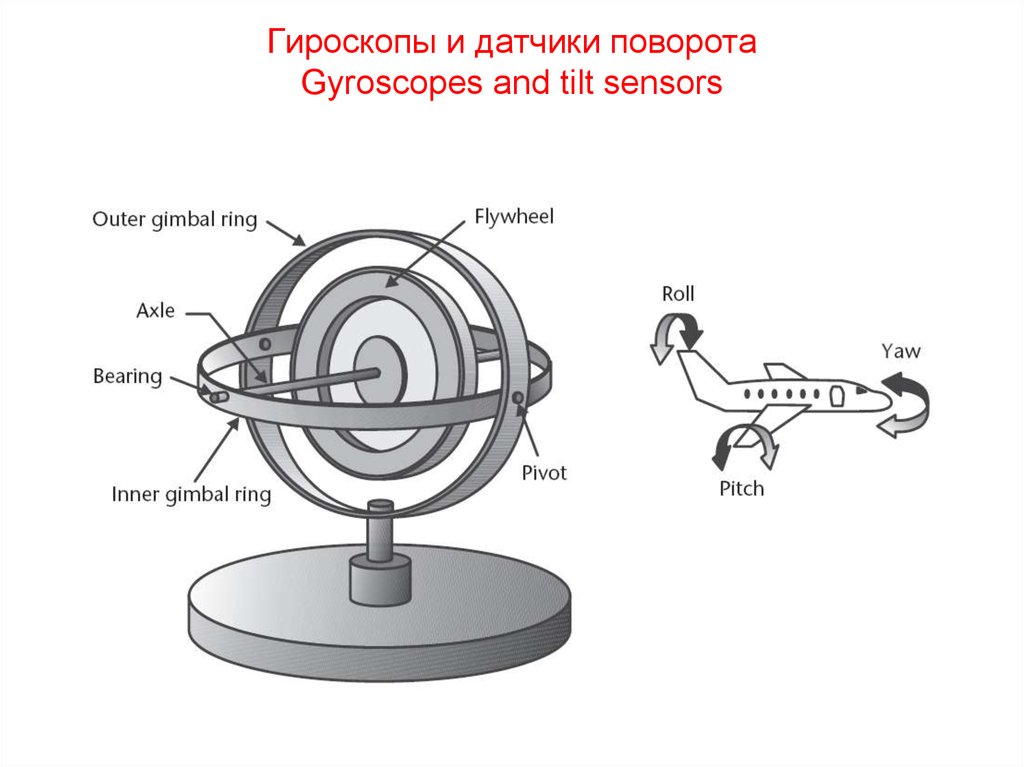 А ферромагнитные материалы не влияют на их функцию. Поэтому гирокомпасы более точны и надежны, чем магнитные компасы.
А ферромагнитные материалы не влияют на их функцию. Поэтому гирокомпасы более точны и надежны, чем магнитные компасы.
2. Помощь в стабилизации
Механические гироскопы могут стабилизировать большие свободно движущиеся тела с помощью гироскопических сил. Например, гироскопы помогают стабилизировать
- Самолеты во время турбулентности
- Беспилотные велосипеды.
- Большие здания
- Ховерборд (самобалансирующийся скутер)
- Сохраняйте равновесие большого корабля во время грозы.
3. В Локализации
МЭМС-гироскопы с другими датчиками (GPS, датчик давления и акселерометр) имеют приложение для определения фактического положения и ориентации твердого тела в свободном пространстве.
4. Определение ориентации продукта
МЭМС-гироскопы используются для определения ориентации тела в свободном пространстве. Например, гироскопические датчики применяются в следующих продуктах:
- Квадрокоптер, самолеты и фактическое положение робота.

- Используется в смартфонах для определения ориентации и поворота смартфона.
- Виртуальная реальность, очки дополненной реальности и другие товары.
5. В смартфонах
МЭМС-гироскоп имеет следующие приложения в смартфонах.
- Когда мы поворачиваем смартфон, видео на YouTube также поворачивается само, если включен автоповорот. Мы реализуем эту функцию, потому что гироскопический датчик смартфона передает информацию о вращении смартфона процессору смартфона. Мы не можем получить эту функцию поворота экрана без датчика гироскопа.
- GPS вместе с гироскопом и акселерометром используется в смартфонах для определения точного местоположения.
- В некоторых играх для смартфонов в качестве управляющего датчика используется гироскоп.
- Google Fit использует акселерометр вместе с гироскопом для отслеживания действий пользователя.
Список продуктов, в которых используются гироскопы
Ниже приведены примеры продуктов, в которых используются гироскопы для определения углового положения или стабилизации.