
Свойства свободного гироскопа.
Гироскоп обладает следующими свойствами:
– сохраняет неизменной положение оси вращения в пространстве;
– устойчив к ударным воздействиям;
– обладает необычной реакцией на действие внешней силы. Если сила стремится повернуть гироскоп относительно одной оси, то он поворачивается вокруг другой, ей перпендикулярной;
– гироскоп безинерционен.
Применение гироскопов и гироскопические эффекты.
Применения гироскопов:
– в качестве компаса. Свободный гироскоп сохраняет свою ориентацию в пространстве (например, направление на полярную звезду) независимо от движения Земли и всевозможных толчков. Заметим, что пользоваться этим компасом можно только в течение ограниченного времени, пока силы трения в подшипниках не “уведут” ось гироскопа.
– в качестве автопилота в летательных аппаратах. В данном случае используется два гироскопа. Один задает горизонтальную плоскость, а второй – направление.
В- качестве успокоителя качки на кораблях.
Несвободный гироскоп используется в качестве гироскопического компаса (компас Фуко).
К отрицательным последствиям проявления гироскопических эффектов можно отнести силы, разрушающие механические конструкции. Эти силы возникают в подшипниках при попытке изменения положения оси вращения различных валов.
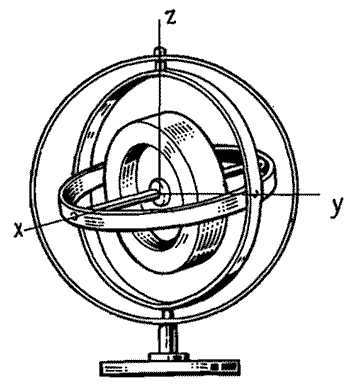
Рис.3 Гироскоп на карданном подвесе.
Возможность изменения положения оси вращения гироскопа в пространстве можно осуществить с помощью карданных колец (рис. 3). Подвешенный таким образом гироскоп получает возможность поворачиваться вокруг следующих трех взаимно перпендикулярных и пересекающихся в одной точке О осей: оси вращения X – X самого гироскопа, называемой главной осью или осью собственного вращения, оси вращения Y – Y внутреннего кольца, оси вращения Z – Z наружного кольца подвеса.
Гироскоп, у которого возможны вращения вокруг трех указанных осей, называется гироскопом с тремя степенями свободы. Точка пересечения этих осей называется точкой подвеса гироскопа.
Для демонстрации различных свойств гироскопа и проведения экспериментов удобно пользоваться несколько иной конструкцией (рис.4). Тяжелый диск С соединен с электродвигателем и жестко закреплен на оси А, которая может совершать движение как в вертикальной так и в горизонтальной плоскостях благодаря карданному подвесу. Для уравновешивания диска С и электродвигателя на другом конце оси А помещен груз Р, который может перемещаться вдоль оси А. Для определения скорости прецессии гироскопа предусмотрен лимб Д, по которому ведется отсчет углов.
Рис. 4
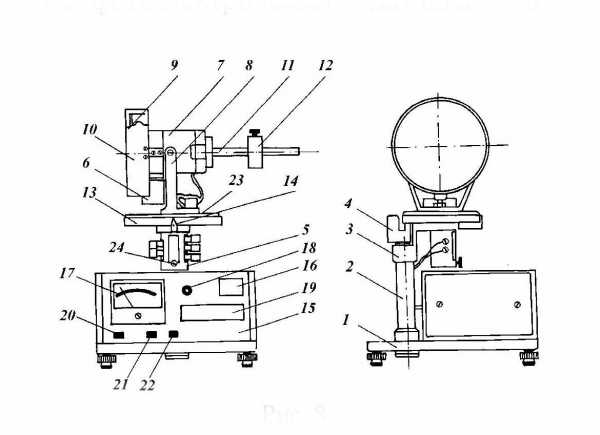
Экспериментальная установка.
На основании 1, (см. рис. 5) оснащенном ножками с регулируемой высотой закреплена колонна 2. С помощью ножек можно произвести выравнивание прибора по горизонтали. На колонне имеется кронштейн 3 с фотоэлектрическим
датчиком 4 и внешней втулкой вращательного соединителя 5. Соединитель 5 позволяет гироскопу вращаться вокруг вертикальной оси и обеспечивает электрическое питание фотоэлектрического датчика 6 и электродвигателя
Диск 9 имеет на окружности отверстия, которые подсчитываются с помощью фотоэлектрического датчика 6 и по индикатору 17 можно определить угловую скорость вращения диска. Ее можно регулировать с помощью ручки 18. Время прецессии фиксируется на индикаторе 19.
Нажатие клавиши «Сеть» 20 вызывает включение питающего напряжения.
При нажатии клавиши «Сброс» 21 осуществляется перевод блока измерений в исходное нулевое состояние. Нажатием клавиш «Стоп» можно остановить отсчет угла и времени прецессии.
Порядок выполнения работы:
ВНИМАНИЕ! Раскрученный гироскоп обладает большим запасом
кинетической энергии. ПРИ ПРОВЕДЕНИИ УПРАЖНЕНИЙ СТРОГО СЛЕДУЙТЕ ПРИВЕДЕННЫМ НИЖЕ УКАЗАНИЯМ.
1. Перед началом работы убедитесь, что рычаг 11 с гироскопом может свободно вращаться вокруг горизонтальной и вертикальной осей.
2. С помощью ножек с регулируемой высотой и уровня 23 установите прибор горизонтально.
3. Перемещением противовеса 12 добейтесь, чтобы рычаг 11 занял горизонтальное положение.
4. Ручку «Регулятор скорости» на панели прибора переведите в крайнее левое положение.
5. Включите прибор клавишей «Сеть». При этом загораются табло индикаторов и лампочки фотодатчиков.
6. Плавно (!) поворачивая «Регулятор скорости», включите электродвигатель и установите скорость вращения гироскопа около 5000 об/мин. В течение всего эксперимента скорость вращения гироскопа изменять не следует.
7. Легким постукиванием рукой по кончику рычага 11 убедитесь в том, что ось гироскопа не меняет своего направления в пространстве.
8. Закрепите вертикальную ось гироскопа винтом 24. Слегка покачивая ось гироскопа, убедитесь, что она легко меняет свое направление в вертикальной плоскости.
9. По метрической шкале рычага 11 определите положение l0 противовеса 12 при уравновешенном гироскопе.
10.Освободите вертикальную ось гироскопа винтом 24. При этом не должно наблюдаться прецессии.
11.Смещением противовеса по рычагу на расстояние Δl=l−l0 создайте вращающий момент M = P·Δl , где Р − вес противовеса (масса противовеса указана на нем).
12.С помощью секундомера и шкалы 16 определите угловую скорость прецессии Ω = φ/
13. Измерения времени и угла прецессии повторить четыре раз при разных положениях груза и одном и том же значении оборотов гироскопа. Результаты измерений занести в табл
14.Из формулы (6) следует, что M = IωΩ, т.е. график зависимости вращающего момента М от произведения ωΩ является прямой с тангенсом угла наклона равным моменту инерции гироскопа. Постройте этот график и определите момент инерции гироскопа.
15. Оценить погрешность определения момента импульса гироскопа и момент инерции ротора двигателя и маховика по данным таблицы 1
Таблица 1.
измерения
Положение про-тивовеса 12 в состоянии равновесия системы l0, м
Число оборотов гироскопа n
Положения перемещаемого противовеса li,м
Значения угла прецессии
φ, рад
Время прецес-сии t, с
Угловая скорость прецессии , рад/c
li-l0/Ω мс/рад
1
2
3
…
studfiles.net
Гироскопы и их применение – где используется, устройство
В 1852 году французский физик Леон Фуко демонстрирует созданный им прибор, позволяющий обнаружить вращение Земли. Гироскоп – так назвал он этот прибор. По гречески Гирос – вращение, Скопео – вижу, наблюдаю. В обзоре вы узнаете что такое гироскопы и их применение.
Гироскоп Фуко представляет собой вращающийся ротор, подвешенный так, что его ось может поворачиваться в любом направлении вокруг некоторой неподвижной точки. Современное исполнение прибора получило название – гироскоп в кардановом подвесе. Он выполнен из двух рамок: наружной, внутренней, и ротора.
Гироскоп ФукоОси вращения рамок и ротора в гироскопе Фуко пересекаются в точке «О» — центре подвеса, совпадающей с центрами масс этих тел. Если трение в подшипниках достаточно мало, то прибор приобретает замечательные свойства. Как бы ни поворачивалось его основание, ось ротора сохраняет неизменное направление в инерциальном пространстве. На этом свойстве гироскопа и был основан опыт Фуко.
Ось вращения гироскопаНаблюдая за гироскопом, установленным на поверхности Земли, мы обнаружим, что ось ротора, сохраняя неизменным направление в инерциальном пространстве, изменяет свою ориентацию относительно предметов, расположенных на вращающейся Земле. На использовании этого и других специфических свойств вращающегося ротора основано действие многих приборов, нашедших широкое применение на самолетах, морских судах, в ракетах. Эти приборы получили название гироскопических. А сам ротор стали называть гироскопом.
Применяют не только карданов подвес, но и другие способы подвешивания ротора. Таковы, например, шаровой гироскоп на аэродинамическом подвесе. Здесь ротор плавает на воздушной подушке, и гироскоп, подвешенный в электромагнитном поле.
шаровой гироскопшаровой гироскопГироскопы можно встретить не только в приборах. Волчок – это простейший гироскоп. Он сложным образом вращается вокруг своей точки опоры. Гироскопические свойства мы обнаруживаем и в роторе многотонной турбины судна, и во вращающихся винтах самолета и вертолета.
Некоторые особенности вращения Земли, о которых мы расскажем далее, также объясняются гироскопическими свойствами.
Кинетический момент
Гироскопический момент Н относительно неподвижной точки О, возникающий при вращении его вокруг полярной оси (ее кратко называют осью гироскопа), направлен вдоль этой оси, называется собственным кинетическим моментом гироскопа. Он равен произведению полярного момента инерции гироскопа на угловую скорость.
Кинетический моментКинетический момент гироскопа Ке при вращении его вокруг любой экваториальной оси с угловой скоростью ωе направлен вдоль этой оси и равен произведению экваториального момента инерции Iе и угловой скорости ωе.
Формула кинетического моментаПри вращении гироскопа одновременно вокруг полярной и экваториальной осей кинетический момент его складывается из собственного момента Н и экваториальной составляющей Ке.
Формула кинетического моментаПолярная и экваториальная осьГироскопы и их применение в технике, скорость собственного вращения достигает десятков тысяч оборотов в минуту, и обычно больше экваториальной в сотни тысяч раз.
скорость собственного вращенияА моменты инерции относительно этих осей – величины одного порядка.
моменты инерцииВследствие этого длина вектора Н во много раз превышает длину вектора Ке, и суммарный момент мало отличается от вектора Н.
Итак, кинетический момент быстро вращающегося гироскопа можно с большой степенью точности принять равным его собственному моменту, и следовательно, направленным всегда вдоль его полярной оси.
кинетический момент быстро вращающегося гироскопаПриближенную теорию гироскопа, основанную на этом допущении, принято называть прецессионной. При рассмотрении гироскопа в кардановом подвесе в приближенной теории пренебрегают кинетическим моментом рамы. Вследствие того, что их угловые скорости, а следовательно и кинетические моменты, пренебрежимо малы по сравнению с собственным моментом.
Правило прецессии
Силы, приложенные к гироскопу, сообщают его оси движение, скорость и направление которого можно легко определить с помощью теоремы Резаля: скорость конца вектора Н всегда равна моменту внешних сил М, приложенных к гироскопу.
Правило прецессииПредположим теперь, что к гироскопу относительно какой-либо его экваториальной оси приложен момент Ме. Это вызывает вращение вектора Н, а следовательно, и полярной оси с угловой скоростью ω.
вращение вектораВращение оси прибора при действии момента внешних сил называют прецессией. Правило прецессии: направление прецессии всегда таково, что вектор Н по кратчайшему пути совмещается с вектором Ме. Угловая скорость прецессии равна отношению экваториальной составляющей момента внешних сил Ме к собственному моменту Н.
Угловая скорость прецессииКоротко правило прецессии можно выразить векторной формулой:
правила прецессииправила прецессииЧитайте: Серверы Edge Power R730 210-ACXU
Из правила прецессии следует очень важный вывод: если момент внешних сил относительно неподвижной точки равен нулю, то ось гироскопа остается неподвижной. Наблюдая за поведением гироскопа в кардановом подвесе, убедимся, что оно происходит в согласии с правилом прецессии. Момент, стремящийся повернуть гироскоп вокрух оси Х, вызывает прецессию вокруг перпендикулярной к ней оси Z. А момент вокруг оси Z сообщает прибору прецессию вокрух оси Х.
Момент, стремящийся повернуть гироскопvx-5.ru
Как работает гироскоп – Телеканал «Наука»
Для успокоения морской качки, передвижении на гироскутере и ориентации картинки в телефоне служат совершенно разные устройства с общим названием — гироскопы. Подборка видеороликов поможет вам разобраться в принципах работы современных систем стабилизации.
Механические гироскопы
Вращение придает объекту стабильность в пространстве, этот принцип используют детский волчок, тарелочка-фрисби и пуля нарезного оружия. Любой из этих предметов можно назвать гироскопом, противодействующим отклонению от оси вращения.
Если вращающийся объект будет закреплен на оси с несколькими степенями свободы, то получится роторный гироскоп. Как только ротор будет раскручен, его ось приобретает устойчивость в пространстве и старается сохранить ориентацию, заданную в начальный момент.
Чем больше масса ротора и скорость его вращения, тем выше способность такого гироскопа сохранять заданное положение главной оси. Так, установка успокоения качки для 10-метровой лодки в сборе весит около 350 кг и имеет ротор, вращающийся со скоростью от 6000 до 10 000 об/мин.
Такие стабилизаторы требуют очень высокой точности изготовления, потребляют значительное количество энергии и издают шум при работе. Все это сказывается на цене и ограничивает их применение в быту. Зато они незаменимы в случаях, когда стабилизируемый объект не имеет возможности опираться на какую-либо поверхность — в воде, воздухе и космическом пространстве.
Электромеханические гироскопы
Моноколеса, стабилизаторы для камер и даже смартфоны также оснащены гироскопами, но их системы работают по совершенно иному принципу. В их основе лежат микроэлектромеханические системы — это микросхемы со встроенным датчиком инерции, которые способны переводить его механические перемещения в электрические импульсы. Общий принцип действия можно понять из следующего ролика.
Управляющие системы по показаниям таких датчиков вычисляют текущее положение объекта и стабилизируют его при помощи электромоторов. Принцип работы хорошо виден на примере стабилизатора для видеосъемки. При просмотре ролика можно включить субтитры с переводом на русский.
naukatv.ru
Практическое применение гироскопов
Описанные выше свойства гироскопа нашли себе разнообразные практические применения. Одно из первых применений свойства гироскопов нашли в нарезном оружии. После вылета из ствола орудия на снаряд действует сила сопротивления воздуха, момент которой может опрокинуть снаряд и изменить его ориентацию относительно траектории беспорядочным образом, что отрицательно влияет на дальность полета и точность попадания в цель. Винтовые нарезы в стволе орудия сообщают вылетающему снаряду быстрое вращение вокруг его оси. Снаряд превращается в гироскоп и внешний момент силы сопротивления воздуха вызывает лишь прецессию его оси вокруг направления касательной к траектории снаряда. При этом сохраняется определенная ориентация снаряда в пространстве.
Другим важным применением гироскопов являются различные гироскопические приборы: гирогоризонт, гирокомпас и т.д. Уравновешенные гироскопы также применяются для поддержания заданного направления движения самолета (автопилот). Для этого крепление гироскопа осуществляют на карданной подвеске, которая уменьшает действие внешних моментов сил, возникающих при маневре самолета. Благодаря этому ось гироскопа сохраняет свое направление в пространстве независимо от движения самолета. При отклонении направления движения самолета от направления, заданного осью гироскопа, возникают автоматические команды, возвращающие к заданному направлению.
Описанное поведение гироскопа также положено в основу прибора, называемого гироскопическим компасом (гирокомпасом). Этот прибор представляет собой гироскоп, ось которого может свободно поворачиваться в горизонтальной плоскости. Под влиянием суточного вращения Земли ось гирокомпаса устанавливается в такое положение, при котором угол между его осью и осью вращения Земли оказывается минимальным. В этом положении ось гирокомпаса оказывается в меридиональной плоскости, т.е. указывает точно на географический север. Гироскопический компас выгодно отличается от компаса с магнитной стрелкой тем, что в его показания не надо вносить поправки на так называемое магнитное склонение (связанное с несовпадением географического и магнитного полюсов Земли), а также не надо принимать мер для компенсации воздействия магнитных наводок от корпуса и оборудования судна.
Описание экспериментальной установки
Экспериментальная установка (рис. 6) состоит из следующих основных узлов:
Диск гироскопа.
Рычаг с метрической шкалой.
Груз, перемещением которого по рычагу 2 задается величина момента силы.
Диск с угловой шкалой для определения угла поворота оси гироскопа в горизонтальной плоскости при прецессии.
Блок измерений и управления.
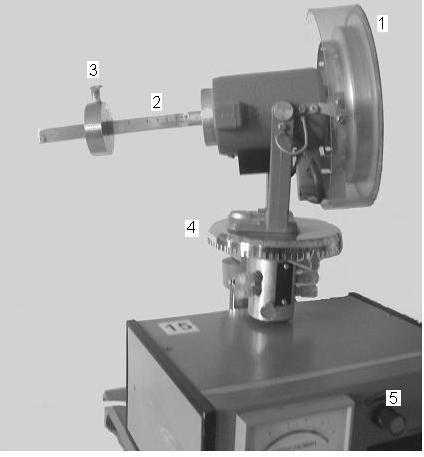
Рис.6.
Задание
Определить модуль момента силы тяжести для нескольких положений груза z на рычаге гироскопа:
,
где m – масса груза, zр – координата груза по метрической шкале рычага, когда гироскоп уравновешен.
Для каждого положения груза определить время поворота оси гироскопа Δt на заданный угол Δφ и вычислить угловую скорость прецессии:

 .
.
Вычислить величину момента импульса гироскопа для каждого из измерений:
 .
.
Вычислить среднее значение момента импульса гироскопа:
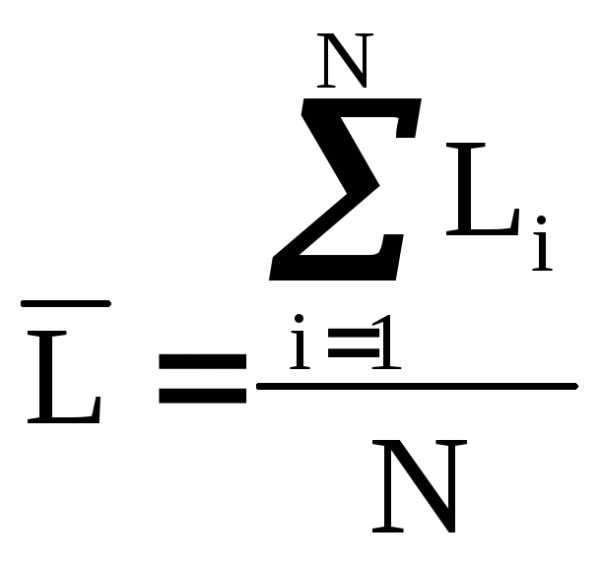 ,
где N
– число измерений.
,
где N
– число измерений.
Вычислить момент инерции гироскопа по формуле I = L/ ( -угловая скорость вращения гироскопа, = 2, – число оборотов двигателя в единицу времени) и определить абсолютную и относительную ошибки в определении момента инерции гироскопа.
studfiles.net
Гироскопы: принцип работы и прецессия
Физика > Гироскопы
Читайте, что такое гироскоп и принцип работы. Изучите вращательный момент, правило правой руки, универсальный шарнир, как выглядит прецессия гироскопа.
Гироскоп – вращающееся колесо или диск, где ось свободна для любой ориентации.
Задача обучения
- Сравните концепцию вращающегося колеса с гироскопом.
Основные пункты
- Вращательный момент расположен перпендикулярно плоскости, созданной r и F. Сожмите пальцы правой руки в направлении F и ваш большой укажет на нужное направление.
- Получается, что сторона вращательного момента сходится с угловым.
- Гироскоп прецессирует вокруг вертикальной оси, потому что вращательный момент к L установлен всегда горизонтально и перпендикулярно. Если гироскоп не вращается, то наделяется угловым моментом в направлении вращательного и совершает обороты вокруг горизонтальной оси.
Термины
- Вращательный момент – вращательный эффект силы, измеряемый в ньютонах на метр.
- Правило правой руки – направление для угловой скорости ω и момента L, на который указывает большой палец правой руки, когда вы зажимаете пальцы в направлении вращения.
- Универсальный шарнир – устройство для приостановки чего-либо (например, корабельного компаса, чтобы он оставался на уровне).
Гироскоп – устройство для измерения или поддержания ориентации, основывающееся на принципах углового момента. Это вращающееся колесо или диск, чья ось выступает свободной для любой ориентации. Она практически фиксирована, потому что установка в универсальном шарнире сводит внешний вращательный момент к минимуму.
Как это работает?
Давайте рассмотрим принцип работы гироскопа. Вращательный момент: измеряет угловой момент по формуле τ = ΔL/Δt.
Мы видим, что направление ΔL сходится с направленностью создающего его вращательного момента. Направление можно вывести, воспользовавшись правилом правой руки: пальцы ладони зажимаются в сторону вращения или силы, а большой палец показывает на угловой момент или скорость.
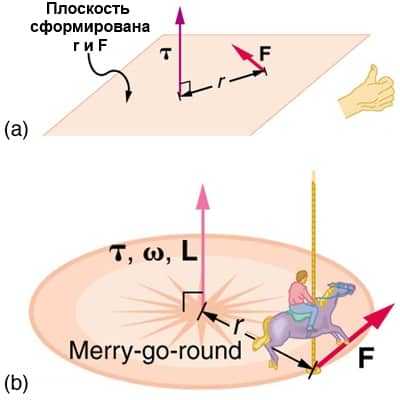
В (а) вращательный момент расположен перпендикулярно плоскости, созданной r и F (сюда указывает ваш большой палец, если вы скручиваете пальцы в направлении F). На (b) видно, что направление вращательного и углового моментов совпадает
Вращающееся колесо: изучите велосипедное колесо и спицы. При вращении угловой момент направлен к левой стороне девушки (на рисунке). Допустим, что мы повторяем движение. Она ожидает, что колесо будет вращаться в ту же сторону, на которую она влияет силой. Но все совсем наоборот. Силы создают вращательный момент, выступающий горизонтальным по отношению к человеку, и именно он формирует изменения в угловом моменте, перпендикулярном изначальному. Выходит, направление L изменилось, а величина нет.
Теперь направление углового момента больше склоняется к человеку, чем раньше. Так что ось колеса смещается перпендикулярно приложенной силе, а не в ожидаемом направлении.
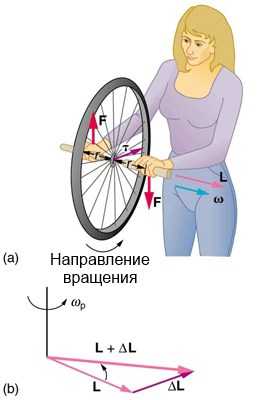
На рисунке (a) девушка поднимает колесо правой рукой и толкает левой. Это создает вращательный момент прямо к ней. Он приводит к изменению углового момента ΔL в том же направлении. На (b) видна векторная диаграмма, изображающая добавление ΔL и L, создающих новый момент движения, указывающий больше на девушку. Колесо движется к ней, и выступает перпендикулярным силам, которые она применила
Гироскоп: точно также можно объяснить поведение гироскопа. В момент вращения на нем активируются две силы. Вращательный момент выступает перпендикулярным угловому, поэтому второй меняет направление, но не величину. Устройство прецессирует (прецессия гироскопа) вокруг вертикальной оси, потому что вращательный момент всегда горизонтален и перпендикулярен L. Если на гироскопе не наблюдается вращения, то он получает угловой момент в направлении вращательного (L = ΔL) и начинает совершать обороты вокруг горизонтальной оси.
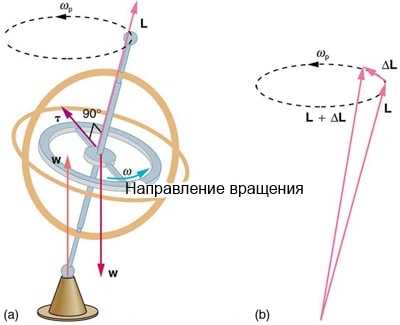
В (а) вы видите, что силами на вращающемся гироскопе выступают его вес и опорная сила от стойки. Они создают горизонтальный вращательный момент, который вносит изменения в угловой (ΔL). На (b) ΔL и L добавляют для формирования нового момента импульса с одной величиной, но в ином направлении. Поэтому гироскоп прецессирует в указанном направлении, избавляясь от падения
Применение
Гироскопы выступают в качестве датчиков вращения. Поэтому их используют в инерциальных системах навигации, где не срабатывают магнитные компасы (как в космическом телескопе Хаббл) или не отвечают точности. Также они необходимы для стабилизации летательных аппаратов, вроде радиоуправляемых вертолетов или беспилотных.
v-kosmose.com
Применение гироскопов – часть 2
Контрольные вопросы. 1. Какое допущение лежит в основе приближенной теории гироскопа? 2. Какая часть момента инерции осталась неучтенной при расчете момента инерции маховика? Как грубо учесть ее? 3. Какой качественный вывод можно сделать из наблюдения прецессии при выключенном двигателе? 4. Объясните возникновение прецессии детского волчка.
Применение гироскопов.
Гироскоп – основная часть таких приборов, как указатель курса, поворота, горизонта, сторон света, гирокомпас. Внутри этих приборов вращаются со скоростью в несколько десятков тысяч оборотов в минуту небольшие роторы-волчки, укрепленные в кардановом подвесе. Корпус прибора можно поворачивать как угодно, при этом ось вращающегося гироскопа будет сохранять неизменное положение в пространстве.
Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит <авторулевой>, а самолета – <автопилот>.
В приборе <авторулевой> применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
<Автопилот> снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно “знает” курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу.
В настоящее время автопилотами оборудованы все современные самолеты, предназначенные для длительных полетов. Гироскоп служит важной составной частью в системах управления космических аппаратов.
Гироскопы применяют так же в системах навигации. Инерциальная навигация относится к такому способу определения местоположения в пространстве, при котором не используются данные каких-либо внешних источников. Все чувствительные элементы находятся непосредственно на борту транспортного средства. Инерциальные измерители линейных ускорений – акселерометры установлены на так называемой гиростабилизированной платформе . Эта платформа, используя свойства гироскопа – сохранять неизменной ориентацию своей оси в пространстве, обеспечивает строго горизонтальное положение осей чувствительности акселерометров (с точностью до единиц угловых секунд). Измеренные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта. Объединенные общей задачей определения координат подвижного объекта, гироскопы и акселерометры образуют инерциальную навигационную систему (ИНС). Помимо этой задачи ИНС поставляет информацию об угловой ориентации объекта: углах крена, тангажа и рыскания (курса) и о скорости объекта.
Конструкция современной ИНС вобрала в себя последние достижения точной механики, теории автоматического управления, электроники и вычислительной техники.
Конструктивно ИНС можно разделить на два класса: платформенные и бескарданные. В первых гиростабилизированная платформа реализована физически в виде рамы трехстепенного карданного подвеса. В таких системах используются традиционные гироскопы с вращающимся ротором. Точность таких систем может достигать 1 морской мили (900 м) за час работы. Эти системы входят в состав бортового навигационного оборудования тяжелых самолетов.
Другой класс – бесплатформенные ИНС (БИНС) отличаются тем, что плоскость горизонта в них реализована математически, используя данные гироскопов и акселерометров. В этих системах могут быть использованы лазерные и волоконно-оптические гироскопы. Здесь нет вращающихся частей, а об угловой скорости судят по фазовой задержке лазерного луча пробегающего по замкнутому контуру. Точность этих систем 1 морская миля за час. Они существенно конструктивно проще и дешевле платформенных. По последним данным лучшие образцы БИНС способны показывать точность, сравнимую с точностью платформенных систем.
Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Основные области применения гироскопов – судоходство, авиация и космонавтика.
Рассмотрим инерциальную навигацию подробно – метод измерения ускорения судна или летательного аппарата и определения его скорости, положения и расстояния, пройденного им от исходной точки, при помощи автономной системы. Системы инерциальной навигации (наведения) вырабатывают навигационную информацию и данные для управления на борту самолетов, ракет, космических аппаратов, морских судов и подлодок.
Теоретические основы. Ускорение есть быстрота изменения скорости, а скорость – быстрота изменения положения. Измеряя ускорение движения, можно путем его интегрирования вычислять скорость. Интегрированием же скорости можно определять текущее местоположение (координаты) летательного аппарата или судна. Таким образом, система инерциальной навигации есть система счисления пути.
Ускорение является векторной величиной, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Акселерометр измеряет величину. Информацию о направлении дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Акселерометры, измеряя фактическое ускорение, скажем, летательного аппарата, в то же время реагируют на гравитационное поле. Для компенсации этого ускорения система инерциальной навигации вычитает из выходных данных акселерометров вычисленное значение g . Величина g вычисляется как функция местоположения (координат), в частности долготы и широты.
Итак, система инерциальной навигации измеряет кажущееся ускорение, в которое входитускорение свободного падения. Затем она, дважды интегрируя эту величину, находит местоположение. И наконец, исходя из этого вычисленного местоположения, вычисляет величину g, которая вычитается из кажущегося ускорения. Такая система с обратной связью второго порядка (рис. 1) ведет себя, как генератор колебаний очень низкой частоты в двух ортогональных горизонтальных направлениях. Период колебаний на уровне моря равен 84 мин; они называются колебаниями Шулера по имени немецкого изобретателя М.Шулера, запатентовавшего в 1908 первый практически пригодный гирокомпас.
Рис. 1. ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА с обратной связью. Система измеряет кажущееся ускорение (в которое входит ускорение свободного падения g ) и, дважды интегрируя его, находит местоположение, затем с учетом последнего определяет ускорение g и, вычитая его из кажущегося ускорения, находит истинное ускорение движения летательного аппарата или судна.
Варианты системы. В прежних системах инерциальной навигации опорная система координат обеспечивалась установкой акселерометров и гироскопов на стабилизированной платформе в кардановом подвесе. Такой подвес изолировал платформу от поворотов летательного аппарата или судна. Это позволяло удерживать акселерометры в неизменной ориентации относительно Земли при движении объекта.
В современных системах инерциальной навигации применяются компьютеры, следящие за ориентацией акселерометров. Такие системы называются бесплатформенными. Выходные данные гироскопов поступают непосредственно на компьютер, который вычисляет мгновенное направление акселерометров в опорной системе координат и соответствующие корректирующие сигналы.
Инерциальные приборы. Основными приборами системы инерциальной навигации являются акселерометры и гироскопы. Акселерометр наиболее распространенного вида представляет собой чувствительную массу, связанную с корпусом пружиной того или иного рода. Пружина может быть механической, но чаще всего это электрическое (электромагнитное, электростатическое или пьезоэлектрическое) устройство, которое создает противодействующую силу. При отклонении корпуса (относительно массы), вызванном приложенным ускорением, появляется сигнал. Электронный усилитель, усилив этот сигнал, создает соответствующую ускорению противодействующую силу пружины (приложенную к массе), которая в системе обратной связи сводит сигнал рассогласования к нулю (рис. 2).
Рис. 2. АКСЕЛЕРОМЕТР . Ускорение движения вызывает отклонение чувствительной массы, закрепленной на упругом шарнире. Сигнал датчика отклонения усиливается и создает пропорциональную ускорению противодействующую силу пружины, приложенную к чувствительной массе, тем самым возвращая сигнал датчика к нулевому значению.
В системах наведения баллистических ракет и космических летательных аппаратов, где точность определения скорости является критически важной, в качестве противодействующей силы ранее использовалась реакция гироскопа, а ускорение автоматически интегрировалось для нахождения скорости. В обычном механическом гироскопе посредством вращающегося ротора, подобного юле, поддерживается фиксированное направление в пространстве. Чтобы прибор был достаточно стабилен для целей инерциальной навигации, должны быть исключены трение и другие возмущающие воздействия. Поэтому огромное значение имеют точные
Рис. 2. АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом. Пример применения трехстепенного гироскопа. Арретир служит для удержания оси собственного вращения ротора в горизонтальном положении при вводе азимута по шкале. 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 – воздушное сопло; 7 – наружная рамка; 8 – ротор; 9 – корпус; 10 – полуось наружной рамки с фиксаторной гайкой; 11 – внутренняя рамка .
mirznanii.com
Гироскоп | Применение в технике
Применение в технике
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали
www.wikiplanet.click