
почему не работает, как включить, установить и настроить
Смартфоны оснащаются большим количеством датчиков, которые делают взаимодействие с гаджетом более комфортным. В частности, на мобильные устройства устанавливается гироскоп. Он является неотъемлемой частью большинства моделей и нуждается в периодическом обслуживании. В процессе обслуживания выполняется калибровка гироскопа на операционной системе Android.
СОДЕРЖАНИЕ СТАТЬИ:
Что такое гироскоп и для чего он нужен
Чтобы понять, для чего требуется калибровка, достаточно сказать несколько слов о самом датчике. Гироскоп представляет собой устройство, которое определяет положение тела относительно земли. На Андроиде он используется в качестве средства реализации таких функций, как автоповорот экрана.
Gsensor понимает, что вы держите телефон горизонтально, а потому меняет ориентацию интерфейса в соответствии с вашим положением. Аналогичным образом интерфейс возвращается в вертикальное положение. Также гироскоп находит свое применение в играх, чье управление базируется на изменении угла наклона. Яркий пример – Real Racing 3 и другие гонки.
Также гироскоп находит свое применение в играх, чье управление базируется на изменении угла наклона. Яркий пример – Real Racing 3 и другие гонки.
Как устроен и принцип работы
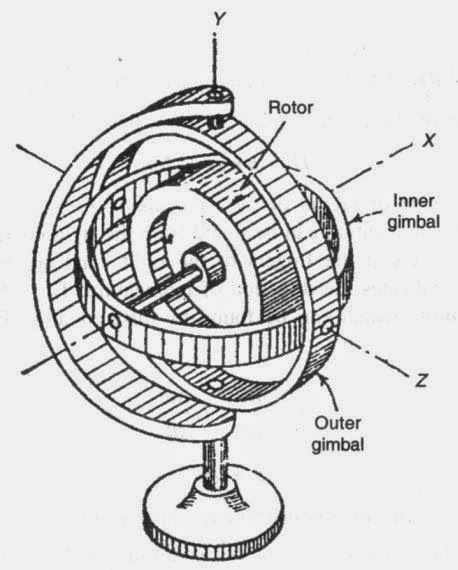
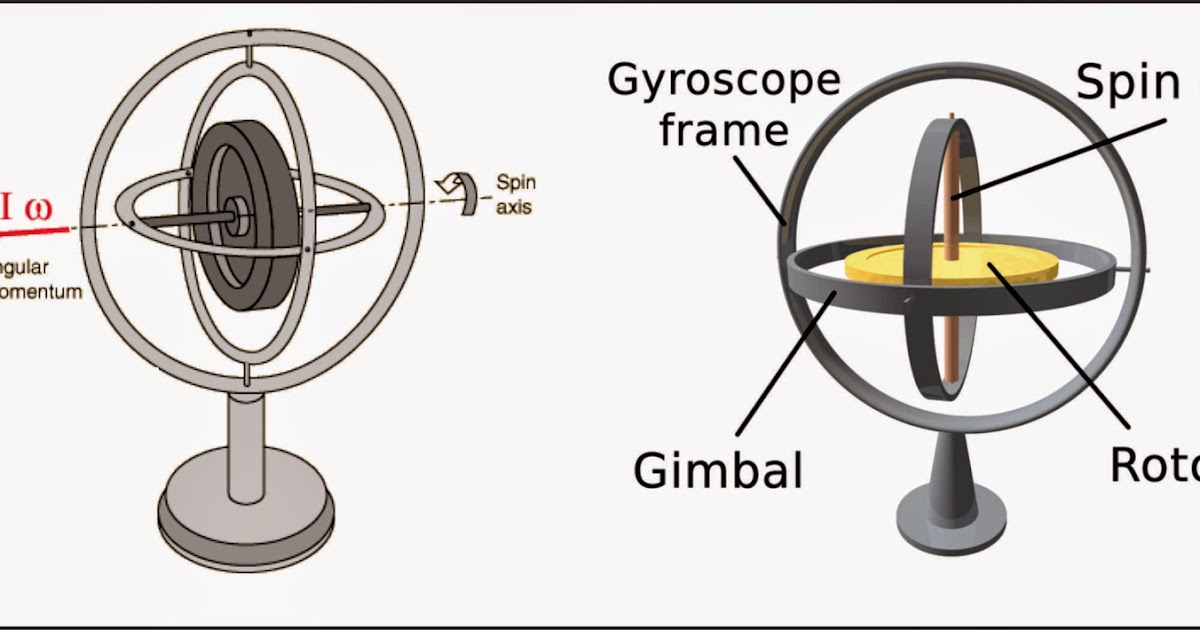
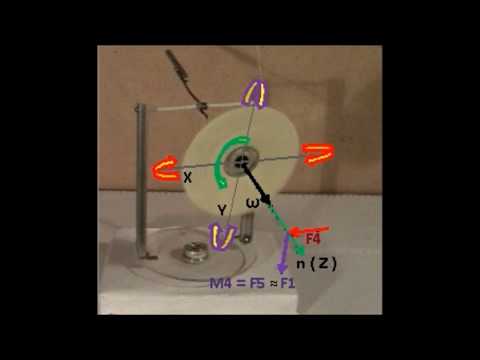
Гироскоп появился еще в 1817 году, когда мир даже не догадывался о том, что когда-то в руках каждого человека будет средство связи в лице смартфона. С тех пор принцип работы датчика сильно изменился. Gsensor представлял собой круг с установленным посередине волчком. Он всегда остается на месте, в отличие от опоясывающих его рам. Именно изменение их положения позволяет определить положение тела в пространстве.
Из-за своей компактности смартфоны попросту не могут обзавестись такой массивной конструкцией. Поэтому производители гаджетов пошли иным путем. Вместо рам и волчка Gsensor телефона использует подвижные массы вещества, которые по аналогии с классической конструкцией гироскопа изменяют свою ориентацию. Изменение положения регистрируется микропроцессором, благодаря чему смартфон понимает, как вы его держите.
Как проверить наличие гироскопа в телефоне
Несмотря на то, что Gsensor является одним из основных датчиков смартфона, на некоторых моделях он может отсутствовать. В таком случае нет необходимости проводить калибровку, а потому важно определить присутствие сенсора. Сделать это можно при помощи стороннего софта. Например, через бенчмарк AnTuTu. Он не только определяет производительность смартфона, но и показывает его характеристики. В разделе «Мое устройство» вы найдете пункт «Гироскоп». Если здесь стоит значение «Не поддерживается», то Gsensor отсутствует.
Похожим образом проверить наличие гироскопа можно через AIDA64. В отличие от AnTuTu, это приложение доступно для скачивания с помощью Play Маркет. Еще один пример – Sensor Sense, программа, демонстрирующая список всех поддерживаемых датчиков.
Наконец, определить наличие сенсора удается по косвенным признакам. Если на вашем смартфоне работает автоповорот экрана, в настройках камеры есть опция создания панорамы, а в игре Real Racing 3 управление автомобилем осуществляется через наклон устройства, то гироскоп на месте. В то же время датчик может выйти из строя или работать некорректно, а потому лучше всего проверять его наличие через специализированный софт.
В то же время датчик может выйти из строя или работать некорректно, а потому лучше всего проверять его наличие через специализированный софт.
Включение и отключение функции
По умолчанию гироскоп всегда активен, и вы не можете отключить датчик. Впрочем, у вас есть возможность активации и деактивации функций, которые используют Gsensor. Яркий пример – автоповорот экрана. Чтобы включить или выключить ее, потребуется:
- Открыть настройки телефона.
- Перейти в раздел «Экран», а затем – «При повороте устройства» (в зависимости от модели смартфона этот пункт может называться иначе).
- Установить значение «Выключить».
Также регулировка функции осуществляется через центр управления. Он вызывается свайпом от верхней части экрана вниз. Вы увидите перед собой около десятка иконок, каждая из которой отвечает за ту или иную опцию. Как правило, под значком с функцией, использующей гироскоп, присутствует надпись «Автоповорот». Если значок подсвечивается – опция работает. Если он серый, то функция отключена.
Если он серый, то функция отключена.
Помимо включения и отключения автоповорота экрана вы можете откалибровать гироскоп. Правда, для этого понадобится установить специализированный софт. Оптимальный вариант – приложение Accelerometer Calibration. Несмотря на то, что оно направлено для калибровки акселерометра, программа также используется для настройки G-сенсора:
- Используя Play Маркет, установите на телефон Accelerometer Calibration.
- Положите смартфон на ровную поверхность.
- Запустите программу.
- Убедитесь, что красная точка находится в центре квадрата.
- Нажмите кнопку «Откалибровать».
Эта простая операция позволяет увеличить точность работы датчика, что выражается не только в более отзывчивом управлении в играх, но и в правильном функционировании автоповорота экрана. Поэтому, если раньше вы испытывали дискомфорт от непроизвольного изменения положения интерфейса, то Accelerometer Calibration поможет решить проблему.
Почему может не работать
Если на вашем смартфоне не работает гироскоп, то сначала нужно проверить его наличие одним из способов, рассмотренных ранее в материале. Возможно, ваша модель просто не оснащается G-сенсором, а потому и не стоит рассчитывать на его работу.
Другое дело, когда в центре управления есть опция «Автоповорот», а в камере есть режим панорамной съемки. Это косвенные свидетельства присутствия Gsensor. В таком случае выход датчика из строя может быть вызван механическими повреждениями гаджета. К сожалению, решить подобную проблему можно только заменой сенсора. Но не торопитесь переходить к радикальным мерам. Попробуйте откалибровать гироскоп. Не исключено, что после этого датчик заработает.
Если речь идет о некорректной работе гироскопа, когда интерфейс поворачивается не в ту сторону, то единственным решением становится именно калибровка. Впрочем, когда на телефоне используется дешевый датчик, даже подобная операция не способна привести к улучшению результата.
Вам помогло? Поделитесь с друзьями – помогите и нам!
Твитнуть
Поделиться
Поделиться
Отправить
Класснуть
Линкануть
Вотсапнуть
Запинить
Читайте нас в Яндекс Дзен
Наш Youtube-канал
Канал Telegram
Adblock
detector
Как правильно откалибровать акселерометр на смартфоне
Любой современный смартфон или планшет имеет множество встроенных устройств и датчиков. О большинстве из них пользователь может даже не догадываться. Однако все они нужны для работы различных приложений.
Один из таких встроенных датчиков называется G-Sensor – он же акселерометр. Его наличие нигде не видно явно, однако используется он постоянно. Неправильная его работа может вызвать странную работу гаджета, а неопытные пользователи могут даже решить, что он сломался. Давайте разберёмся, для чего он нужен и что можно сделать в случае неполадок, связанных с этим устройством.
Давайте разберёмся, для чего он нужен и что можно сделать в случае неполадок, связанных с этим устройством.
Для чего нужен датчик
Без акселерометра смартфоны не были бы такими удобными и были бы похожи на сенсорные мобильники, которые появились более 10 лет назад. У них не было некоторых функций, к которым мы все уже привыкли, и они стали возможны именно благодаря G-сенсору.
Так как основное назначение этого датчика – определение положения гаджета в пространстве, то это позволило реализовать функцию поворота. Она срабатывает при повороте смартфона, и экран автоматически переворачивается. Это настолько удобная и естественная функция при фото- и видеосъёмке или при просмотре видео, что воспринимается, как естественная. Однако ей мы обязаны именно акселерометру.
На основе этого датчика работают популярные приложения – шагомеры, которыми пользуются многие. Также он используется в различных играх самых разных жанров – например, с его помощью реализуется управление в гоночных симуляторах путём поворота смартфона.
Как работает акселерометр
Это устройство контролирует положение гаджета в пространстве. Его действие основано на земной гравитации, а показания считываются благодаря изменению положения подвижных контактов при изменении положения датчика.
Устройство этого датчика несложное. Внутри корпуса имеется подвижная перегородка, перемещения которой ограничены упругими контактами. При смещении этой перегородки под действием гравитации в любом направлении происходит изменение напряжения между её контактами и подвижными. Анализируя данные этих контактов, можно узнать, в каком положении находится датчик в любой момент времени.
Конечно, датчик этот крохотный и изменения, которые в нём происходят, очень малы. Поэтому используются усилители, которые превращают малые колебания в достаточно большие. Это значительно повышает точность измерений и позволяет более точно узнать положение датчика.
Всё остальное – дело программистов, которые на основе показаний акселерометра внедряют разные полезные функции в операционную систему или в приложения.
Акселерометр можно в любой момент выключить. Для этого под верхней шторкой Android есть функция «Автоповорот», которая по умолчанию включена. Но иногда она может мешать, например, при чтении книги, и её можно легко отключить, а потом также легко включить.
Калибровка акселерометра G-Sensor
Иногда бывает, что поворот экрана или другие приложения, использующие акселерометр, начинают вести себя неправильно. Например, экран не переворачивается при наклоне, управление в играх не срабатывает…
Так бывает, если данные с датчика неправильно обрабатываются. Ломаться в нём практически нечему, так что это обычно чисто программная проблема.
Решается она также программно – просто системе нужно указать, какие данные даёт акселерометр в ровном, горизонтальном положении. Это будет использоваться, как точка отсчёта, нулевой уровень, и в дальнейшем расчёт положения происходит нормально.
Такая настройка называется калибровкой акселерометра. Сложно в этом ничего нет, и с процедурой может справиться любой пользователь:
- Из магазина Play Market нужно скачать и установить утилиту GPS Status&Toolbox.

- Запустить установленную программу.
- Положить смартфон на ровную поверхность – на окно, стол и т. п.
- Не перемещая устройство, открыть в программе раздел «Tools» — инструменты.
- Выбрать пункт «Калибровка акселерометра» и подтвердить это действие нажатием «Ок».
- Выбрать «Откалибровать». Будут предложены также пункты «Усреднить» и «Сбросить» — ими пользоваться не следует.
По окончании процедуры появится сообщение, что акселерометр откалиброван, и можно проверить его в действии.
В смартфонах Xiaomi есть встроенная возможность калибровки. Она находится в настройках дисплея. Никакое приложение при этом скачивать не нужно.
Вот таким нехитрым способом можно очень быстро настроить гироскоп – акселерометр на Android. Напишите в комментариях, встречались ли вам проблемы с этим датчиком, как они проявлялись и как вы решили эту проблему. Кому-нибудь из читателей наверняка пригодится ваш опыт.
Напишите в комментариях, встречались ли вам проблемы с этим датчиком, как они проявлялись и как вы решили эту проблему. Кому-нибудь из читателей наверняка пригодится ваш опыт.
Настройки чувствительности в PUBG MOBILE: гироскоп, прицел
Чтобы уничтожать врагов быстро и не беспокоиться за то, что у вас прицел уведет слишком далеко, надо настроить чувствительность и привыкнуть к ней. Мы собрали основные факторы настройки чувствительности, от которых можно отталкиваться при кастомизации.
У каждого оружия в игре свой разброс, и его тоже контролировать. С хорошей сенсой (чувствительностью) вам будет проще это сделать. Но, несмотря на то, что вы можете много проводить в игре, к каждому прицелу, пушке и чувствительности надо привыкать.
Мы рекомендуем выделить под настройку сенсы целый день. Потому что за сутки вы вполне сможете привыкнуть к новым настройкам, что-то поменять под себя, а после отправиться в матчмейкинг уничтожать соперников
И все-таки, лучшими настройками можно назвать только те, с которыми вам удобно играть. С которыми вы чувствуете себя комфортно и можете смело бросаться в трудные ситуации, зная, что у вас хватит реакции и правильных настроек для убийства врага.
С которыми вы чувствуете себя комфортно и можете смело бросаться в трудные ситуации, зная, что у вас хватит реакции и правильных настроек для убийства врага.
Максимально удобная чувствительность: настройка
Прежде, чем вы будете сбивать свой конфиг, сделайте скриншот экрана, чтобы в случае чего вернуть свои настройки назад.
Настройки камеры в PUBG MobileНастройки камеры, как и настройки чувствительности на разных прицелах, также невероятно важны. Разберем и их.
Детальная настройка камеры
Каждая из настроек включает в себя одни и те же пункты, которые надо настраивать индивидуально. Настройка камеры, если дословно, влияет на то, как быстро будет меняться изображение на экране (поворот) во время простого смахивания пальцем по экрану без стрельбы.
Этот параметр никак нельзя настраивать в таком же процентном показателе, как во время стрельбы, поскольку это абсолютно разные действия.
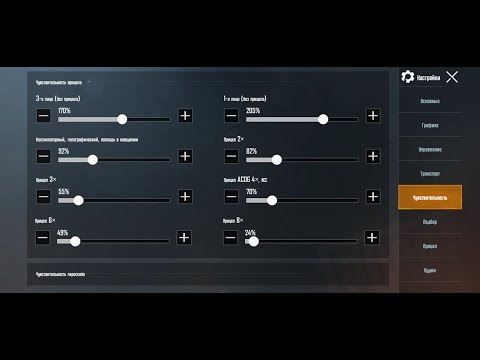
Мы предлагаем сделать такие настройки:
- От первого лица без границ — на 165%.

- От 3-го лица без границ — на 150%.
- Аим-помощь (красная точка), коллиматор — на 75-80%.
- Прицел 2х — 40%.
- Прицел 3х — 27%.
- Прицел 4х — 20%.
- Прицел 6х — 22%.
- Прицел 8х — 11%.
ADS настройки
Эти настройки используются в то время, когда вы стреляете. Вы можете спросить: «Зачем нужны разные настройки — для камеры и для ADS?». Ответ простой. Чтобы держать раздачу каждого конкретного оружия нужна разная чувствительность. Грубо говоря, если вы поставите и в ADS и в чувствительности камеры одинаковые показатели, что это покажется вам неудобным при первой же перестрелке.
ADS чувствительностьОднако настройки изменяются совсем немного.
- От первого лица без границ — 165-170%.
- От третьего лица без границ — 160-165%.

- Красная точка (коллиматорный) — 70-80%.
- Прицел 2х — 40%.
- Прицел 3х — 27-29%.
- Прицел 4х — 25-27%.
- Прицел 6% — 22%.
- Прицел 8х — 11-12%.
Чувствительность гироскопа
Этот тип чувствительности да и камеры в принципе работает только в том случае, если в настройках вы включили гироскоп. Он будет полезен игрокам, у которых есть возможность использовать телефон (наклон и поворот) для направления прицела.
Чувствительность гироскопаВ настройках чувствительности гироскопа многие параметры сильно завышены, однако они легко подстраиваются под ваш телефон и вас индивидуально. Поставьте эти настройки, и отталкивайтесь от них во время регулировки в тестовом матче.
- От первого лица без границ — 350-360%.
- От третьего лица без границ — 340-360%.

- Коллиматорный, помощь в прицеливании — 320-330%.
- Прицел 2х — 300-305%.
- Прицел 3х — 300-305%.
- Прицел 4х — 210%.
- Прицел 6х — 167-171%.
- Прицел 8х — 70-71%.
Настройки чувствительности для каждого прицела по отдельности
Все прицелы нуждаются в пояснении собственной чувствительности: почему такие цифры и чем они отличаются между собой.
Коллиматорный, помощь в наведении (красная точка) — 70-80%
Выше мы написали, что лучше выставить 70-80% чувствительности, а потом, в тренировочном матче, её отредактировать. Такая сенса устанавливается для контроля отдачи на штурмовых винтовках. Желательно попрактиковаться 10-20 минут с такой чувствительностью.
Коллиматорный прицелПрицел 2х — 40%
Если вблизи, с коллиматорным прицелом, вам нужна резкость поворота камеры, чтобы быстрее навестись на противника, который находится рядом с вами, то прицел 2х ставится на пушки с предпочтением боя на средней дистанции. Поэтому здесь мы сильно уменьшаем чувствительность.
Поэтому здесь мы сильно уменьшаем чувствительность.
Прицел на 3х и 4х — 27% и 25%
Эти прицелы хорошо сочетаются с винтовками и также применяются на дальней дистанции. Желательно выставить следующие настройки:
Прицел 3х — 27-29%.
Прицел 4х — 25-27%.
Прицел 3х и 4хПрицел 6х и 8х — 22 и 11.
Прицелы с кратностью 6х и 8х — это бой на дальней дистанции, причем опытными игроками он нередко используется для того, чтобы загнать противника в ловушку к другим игрокам или союзникам, расстреливающим врагов с обычного коллиматора.
Выставляем следующие настройки:
Прицел 6х — 22%.
Прицел 8х — 11%.
Прицелы 6х и 8хИспользование гироскопа
У гироскопа есть свои плюсы и минусы.
- Во-первых, если у вас старый, но мощный телефон, то гироскоп будет давать сбой. На это часто жалуются владельцы подобных устройств.
- Во-вторых, если вы много месяцев играете в PUBG Mobile без гироскопа, то его введение в игру будет для вас очень неудобным.

Но плюсы перевешивают минусы:
- С гироскопом вы будете быстрее прицеливаться.
- Они удобен во время перестрелок на ближних дистанциях.
- Если вы попали в перестрелку и вам нужно двигаться, то вы поймете, что пальцами неудобно и стрелять, и наводиться, и бежать. А с гироскопом можно делать все и сразу.
- Отдачу контролировать легче.
Также, если у вас относительно новый телефон (выпуск после 2018-2019 года), то проблем с гироскопом быть не должно относительно технической части. Он будет работать исправно, и остается только привыкнуть к нему.
Как включить гироскоп и кому он подходит
Гироскоп включается в настройках по такому пути:
- Открываем настройки.
- Выбираем основные настройки.
- Прокручиваем почти в самый конец и видим гироскоп и подвижную кнопку атаки.
- Выбираем «Всегда включено» или «Always On».
Он точно пригодится игрокам:
- Которые хотят повысить свой скилл.
 Практически все профессиональные игроки рекомендуют использовать гироскоп.
Практически все профессиональные игроки рекомендуют использовать гироскоп. - У которых обновился телефон и теперь они могут играть в PUBG Mobile без лагов.
- Которые решили полностью поменять настройки игры, и теперь готовы попробовать гироскоп и множество других нововведений.
Помните, что к любым изменениям, будь то включение гироскопа или изменение чувствительности мыши, стоит быть готовым. Нельзя кардинально изменять настройки игры и сразу приступать к играм против реальных людей. Практикуйтесь, изменяйте чувствительность во время игры, старайтесь сделать конфиг (настройки) идеально под себя, чтобы больше никогда к ним не возвращаться
Подвижная кнопка огня
Подвижная кнопка огня становится для многих игроков проблемой, поскольку она создает вторую кнопку прицеливания и стрельбы на экране в тот момент, когда у вас от испуга или из-за резкого поворота появляется необходимость смотреть в другую сторону.
Рекомендуется отключить подвижную кнопку огня в том случае, если у вас небольшой экран, а также, если вы постоянно путаетесь в передвижении и стрельбе в сложных ситуациях
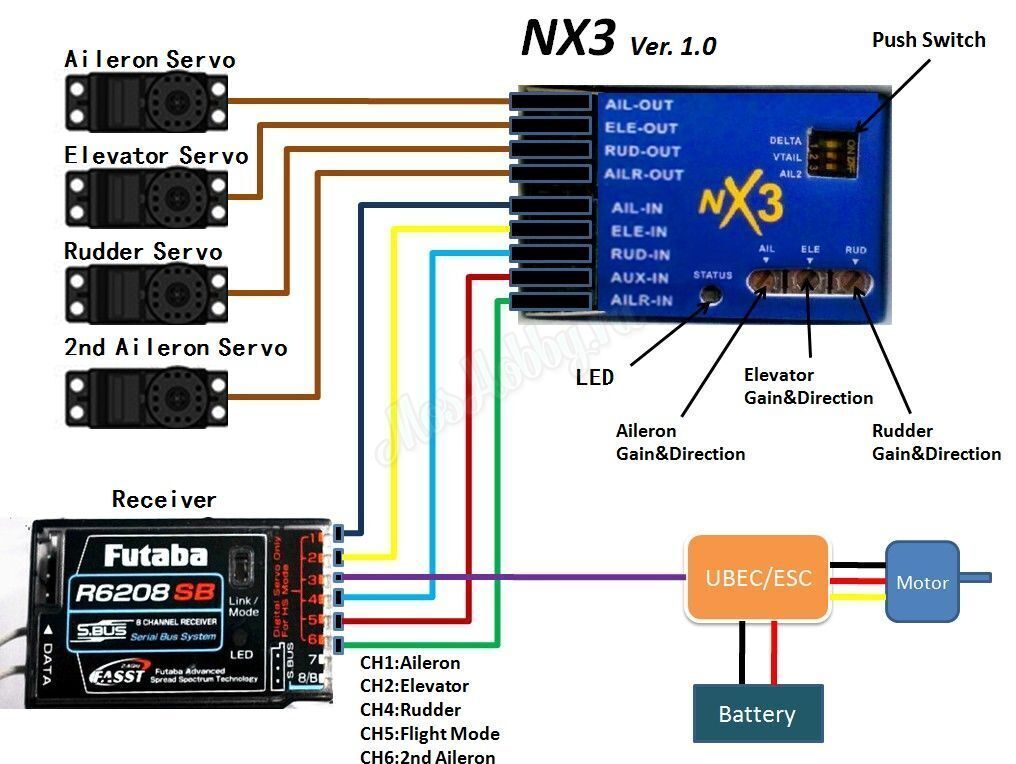
Настройка реверса гироскопа — Мегаобучалка
На этом этапе нам необходимо настроить правильную работу гироскопа.
Каких то конкретных указаний по поводу настройки гироскопа нет и быть не может. Это потому что конкретные значения зависят от множества факторов, как то: модель гироскопа, его расположение и ориентация на модели, реверс канала в аппаратуре, модель сервомашинки и конструкция хвостового ротора на модели. Поэтому применяем методику…
Для этого надеваем качалку на хвостовую серву и снимаем с нее тягу.
Включаем аппаратуру, включаем режим HOLD, подключаем питание модели. В момент подключения необходимо что бы модель была неподвижна в течение 4-5 секунд. Это нужно для того что бы гироскоп запомнил состояние покоя датчика. Это называют «инициализация». После инициализации необходимо проверить режим работы гироскопа. Для этого двигаем стик руддера вправо. Серва смещается в каком либо направлении. Возвращаем стик в центр и смотрим, возвратилась ли серва в первоначальное положение. Если да, то значит гироскоп работает в режиме NORMAL.
После инициализации необходимо проверить режим работы гироскопа. Для этого двигаем стик руддера вправо. Серва смещается в каком либо направлении. Возвращаем стик в центр и смотрим, возвратилась ли серва в первоначальное положение. Если да, то значит гироскоп работает в режиме NORMAL.
Если серва заняла положение НЕ первоначальное положение, значит гироскоп работает в режиме УДЕРЖАНИЯ (AVCS)
Для настройки нам необходим режим HORMAL. Если он не получился, то нужно реверсировать канал чувствительности гироскопа и добить того ,что бы серва возвращалась в первоначальное положение.
После того как мы добились работы гироскопа в режиме NORMAL, снимаем качалку хвостовой сервы и устанавливаем ее так, что бы шарик смотрел на балку.
Надеваем тягу на шар.
Ослабив винты крепления кронштейна к балке, двигаем серву по ней так ,что бы лопасти хвостового ротора заняли следующее положение.
Теперь нужно настроить направление работы хвоста. Двигаем стик руддера вправо, слайдер ХР должен сместиться влево, и наоборот.
Двигаем стик руддера вправо, слайдер ХР должен сместиться влево, и наоборот.
Положение стика Положение слайдера
Если слайдер движется синхронно стику, то реверсируйте 4-й канал в аппаратуре и тем самым добейтесь зеркального движения слайдера.
Реверс гироскопа проверяется следующим образом: берете левой рукой модель за хвостовой стабилизатор и резко двигаете вправо на 15-20 см. Слайдер при этом, при правильно настроенном реверсе гироскопа, должен сместиться влево.
Если это не так, то переключаете свич реверса на ГИРОСКОПЕ в противоположное положение и проверяете снова.
Настройка лимитов гироскопа делается следующим образом: сдвигаете стик руддера в крайнее положение, и при помощи регулятора лимитов на гироскопе ,добиваетесь того, что бы слайдер свободно ходил по валу и не упирался в крайних положениях. Если при этом у Вас с какой-либо стороны слайдер немного не доходит до крайнего положения – ничего страшного, это не принципиальная ошибка. Это особенность работы хвоста.
Это особенность работы хвоста.
На этом этапе надо вернуть гироскоп в режим AVCS (удержания)
Механическая настройка закончена.
Настройка чувствительности:
Если у вас провод чувствительности гироскопа подключен к 5-му каналу, то войдя в меню TRVL ADJ и уменьшите значение расхода 5-го канала до 50-ти процентов. Снимите с модели лопасти ОР. Возьмите вертолет следующим образом в правую руку и сняв в аппаратуре режим HOLD, плавно двигайте стик газа вверх.
После того как вертолет выйдет на рабочие обороты, небольшим усилием постарайтесь его повернуть вокруг своей оси. Гироскоп должен стараться его в первоначальное положение. Если при этом вы рукой ощущаете ритмичную вибрацию, то уменьшайте расход 5-гол канала до тех пор, пока вибрация не пропадет. Как только она пропадет – значит первоначальная настройка чувствительности закончена.
Экспоненты.
Для более плавного руления вертолетом необходимо настроить экспоненты элеватора, элеронов и хвоста. Значения экспонент весьма индивидуальны. Со временем Вы выберете наиболее удобные Вам значения, но для начала выставим следующие:
Значения экспонент весьма индивидуальны. Со временем Вы выберете наиболее удобные Вам значения, но для начала выставим следующие:
В меню D/R & EXP для элеронов и элеватора устанавливаем значения +30%, для руддера – +35%.
Первый полет.
Вот и пришло время первого полета. Вы готовы морально, а вертолет технически.
Включаем аппаратуру, включаем HOLD, подключаем питание модели, даем время на инициализацию гироскопа и ставим вертолет на ровную площадку на расстоянии 3-4 метров от себя. Плавно поднимаем стик газа до середины и раскручиваем основной ротор до рабочих оборотов. Пока не поднимаем модель. Аккуратными движениями стиком руддера проверяем работу хвоста. Если все нормально, то поднимаем модель на 20-30 см от земли и снова проверяем работу гироскопа. Если при висении модель начинает ритмично «вилять» хвостом, то уменьшаем чувствительность гироскопа. Если «плывет» то увеличиваем.
Проверяем обороты ОР.
На этом первоначальная настройка модели вертолета закончена.
Удачных посадок!
Как настроить гироскоп на телефоне?
Как настроить гироскоп на телефоне?
Шаги
- Откройте на телефоне меню настроек. Приложение «Настройки» находится в списке приложений.
- Коснитесь меню Движения. …
- Нажмите на Расширенные настройки.
- Нажмите на Калибровка гироскопа. …
- Положите устройство на плоскую поверхность.
- Нажмите Откалибровать.
- Дождитесь, пока завершится процесс калибровки.

Как включить акселерометр в телефоне?
Если это не происходит, не переживайте, есть ещё один способ включить гироскоп.
- Заходим в настройки.
- Ищем вкладку “специальные возможности” и заходим туда.
- Ищем «автоповорот экрана» и ставим галочку напротив этого пункта.
- Перезагружаем устройство.
Как настроить гироскоп на Xiaomi?
Калибровка гироскопа Чтобы откалибровать гироскоп нужно: Запустить инженерное меню и перейти в подраздел » Gyroscope». Коснуться надписи «Calibrate» и следовать инструкциям калибровщика. Перезагрузить телефон.
Как откалибровать гироскоп на айфоне?
Нажмите Услуги определения местоположения . Убедитесь, что переключатель служб определения местоположения включен / зеленый, а затем прокрутите вниз и коснитесь Системные службы . На следующем экране переключите калибровку компаса и калибровку движения и расстояние до включенных / зеленых позиций.
Как откалибровать сенсор на Xiaomi?
Войти в инженерное меню Xiaomi, введя в номеронабирателе комбинацию *#*#6484#*#* или *#*#4636#*#*. Выбрать пункт Touchpanel, перейдя к настройкам сенсора. Нажать на кнопку калибровки (Calibrate) и выполнять дальнейшие инструкции утилиты (сообщение TAP означает одно нажатие, 2TAP – двойное касание).
Выбрать пункт Touchpanel, перейдя к настройкам сенсора. Нажать на кнопку калибровки (Calibrate) и выполнять дальнейшие инструкции утилиты (сообщение TAP означает одно нажатие, 2TAP – двойное касание).
Как откалибровать компас на Сяоми?
Калибровка компаса в Xiaomi
- В папке «Инструменты» на одном из рабочих столов выбираем «Компас».
- Приложение сразу же предложит откалибровать датчик.
- Производим манипуляции, показанные на экране. …
- Как только услышите вибрацию – калибровка завершена.
Как сделать калибровку компаса?
Как откалибровать компас на Android
- Нажмите голубую точку на карте, которая указывает ваше местоположение.
- Выберите «Откалибровать компас».
- Следуйте инструкциям в соответствии с показанной анимацией.
- Готово! Теперь синяя точка должна указывать в правильном направлении.
Как пользоваться компасом в телефоне Xiaomi?
Как пользоваться компасом на Xiaomi
- в тандеме со штатной камерой смартфона.
 Для этого необходимо включить компас и держать телефон вертикально – камера включается автоматически;
Для этого необходимо включить компас и держать телефон вертикально – камера включается автоматически; - как классическим компасом. Включаем приложение и держим фаблет горизонтально. На экране будет изображение компаса со стрелками;
Как включить компас на телефоне?
Функция компаса доступна в предустановленных приложениях на многих Android-устройствах и работает через технологию GPS и геомагнитный датчик. Чтобы увидеть заветную стрелочку, всегда указывающую на север, просто откройте приложение Google Maps (Карты Google) или Яндекс. Навигатор.
Для чего нужен компас в телефоне?
Зачем нужен компас в телефоне Данное приложение создано, дабы помочь пользователю устройства: Ориентироваться на открытой местности. Узнать свои координаты и точное местонахождение в данный момент, даже если под рукой нет топографической карты.
Почему магнит указывает на север?
Здравствуйте. Стрелка компаса находится в вакууме, и подвержена магнитному полю Земли. … Так что северная стрелка компаса – это северный полюс маленького магнита компаса, он указывает на южный полюс Земли, находящийся вблизи от северного географического полюса. Поэтому она и показывает на север.
… Так что северная стрелка компаса – это северный полюс маленького магнита компаса, он указывает на южный полюс Земли, находящийся вблизи от северного географического полюса. Поэтому она и показывает на север.
Куда должен показывать компас?
Компас метрологический инструмент и его стрелки указывают на полюса, северный и южный. Какой из полюсов планеты главнее, вопрос обсолютно не корректен и является относительным. К примеру когда вы двигаетесь в южном направлении, главный конец стрелки для вас будет южный.
Почему утверждение компас указывает на север не соответствует истине?
Утверждение, что стрелка компаса указывает точное направление, неверно, так как вблизи северного географического полюса Земли находится её южный магнитный полюс, не совпадающий с географическим.
Почему стрелка компаса указывает направление на север лишь приблизительно?
Потому что на Северном полюсе Земли находится южный магнитный полюс
Какой магнитный полюс расположен на севере земли?
Полярность Традиционно конец магнита, указывающий направление на север, называется северным полюсом магнита, а противоположный конец — южным. Известно, однако, что одинаковые полюса отталкиваются, а не притягиваются. Из этого следует, что северный магнитный полюс на самом деле физически является южным.
Известно, однако, что одинаковые полюса отталкиваются, а не притягиваются. Из этого следует, что северный магнитный полюс на самом деле физически является южным.
больше возможностей при игре с геймпадом!
15.02.2022
Кто: разработчики Fortnite
В сотрудничестве со специалистом по устройствам ввода и создателем технологии Flick Stick Джулианом Смартом (Jibb) мы добавили в Fortnite управление с помощью гироскопа на платформах, которые его поддерживают. А также технологию Flick Stick!
Вы наверняка думаете: «Вроде бы в Fortnite уже есть управление с помощью гироскопа». Хотя в Fortnite на Nintendo Switch и устройствах на базе ОС Android уже было основанное на использовании гироскопа управление, в версии 19.30 мы добавили на Nintendo Switch, PlayStation 4, PlayStation 5, ПК и устройствах на Android более стабильное управление с его помощью. Читайте дальше, чтобы узнать об этом подробнее, но сначала посмотрите это поясняющее видео, созданное Jibb:
Обзор параметров гироскопа
Как включить гироскоп (и как он действует)
Вы можете включить и отключить управление гироскопом на вкладке «Сенсор и движение» в настройках. Для этого нужно поставить переключатель «Прицеливание с помощью гироскопа» в положение «Вкл.» или «Откл.». В положении «Вкл.» вы управляете камерой, вращая геймпад. Это может обеспечить большую точность, чем при стандартном прицеливании с помощью мини-джойстика, но не должно полностью заменять его. В основном игроки будут по-прежнему пользоваться правым мини-джойстиком для управления камерой, однако гироскоп будет помогать им, когда мини-джойстик использовать неудобно.
В разделе «Сенсор и движение» вы заметите больше параметров гироскопа. Расскажем о них подробнее!
Активный режим: выбирает, когда гироскоп активен
Есть две разные настройки активного режима: «Активный режим (бой)» — если вы хотите, чтобы гироскоп был активен во время боя; и «Активный режим (строительство)» — если вы хотите, чтобы гироскоп был активен во время строительства или редактирования.-450.jpg)
Активный режим (бой)
Только при использовании оптического прицела: гироскоп активен только во время прицеливания из оружия с оптическим прицелом.
При использовании оптического прицела и прицеливании: гироскоп активен во время прицеливания из любого оружия.
При использовании оптического прицела, прицеливании, сборе ресурсов: гироскоп активен во время прицеливания из любого оружия или использования инструмента.
Всегда: гироскоп активен, даже если вы не прицеливаетесь из оружия и не используете инструмент.
Активный режим (строительство)
Нет: гироскоп отключён во время строительства и редактирования.
Редактирование: гироскоп активен во время редактирования, но не строительства.
Всегда: гироскоп активен во время строительства и редактирования.
Если для активного режима выбрано значение «Всегда», рекомендуется найти другой способ отключения гироскопа, чтобы можно было сбрасывать положение геймпада. Для этого вы можете выбрать значение «Отключает» у параметра «Действие мини-джойстика для обзора» (объясняется дальше) или настроить управление так, чтобы на вкладке настроек геймпада находилась кнопка «Модификатор гироскопа».
На Android простой способ контролировать работу гироскопа — это использовать параметр «Действие касания». Это позволяет включить или выключить гироскоп касанием свободной области на экране.
Действие мини-джойстика для обзора: как использование правого мини-джойстика влияет на гироскоп
Выберите, как ваш правый мини-джойстик действует на гироскоп! Если вы выбрали значение «Нет» у параметра «Действие мини-джойстика для обзора», использование (или неиспользование) правого мини-джойстика никак не влияет на гироскоп. Если вы выбрали значение «Отключает», при использовании правого мини-джойстика гироскоп отключается. Это помогает изменять положение геймпада, не двигая камеру.
Если вы выбрали значение «Отключает», при использовании правого мини-джойстика гироскоп отключается. Это помогает изменять положение геймпада, не двигая камеру.
Если выбрать значение «Включает» у параметра «Действие мини-джойстика для обзора», гироскоп будет включён при использовании правого мини-джойстика, даже если в соответствии с настройками активного режима он обычно не активен. Если правый мини-джойстик не используется, гироскоп не отключается.
Ползунки чувствительности и варианты выбора
Разумеется, вы можете настроить чувствительность гироскопа. Также можно настроить соотношение чувствительности по вертикали и по горизонтали. Если установлено значение по умолчанию (1.0), камера будет двигаться в полном соответствии с движениями геймпада. «Ускорение» (значение по умолчанию равно 2X) повышает чувствительность при быстром повороте геймпада. Чтобы прицеливание было стабильным, при приближении камера будет поворачиваться медленнее. Это масштабирование можно отключить в разделе «Доп. параметры гироскопа».
параметры гироскопа».
Ускорение можно настроить или отключить. Включив ускорение, вы сможете быстрее поворачивать камеру при быстром повороте геймпада, даже если вы оставляете чувствительность на низком уровне. При отключении ускорения камера поворачивается в точности пропорционально повороту геймпада независимо от того, насколько быстро вы перемещаете геймпад. Если вы предпочитаете использовать модель ускорения, которая была в игре до версии 19.30, вы можете выбрать прежние настройки ускорения.
Другие параметры гироскопа
Также на вкладке «Сенсор и движение» игроки могут управлять стабильностью своего прицеливания при удержании геймпада почти неподвижно, а также включать или отключать технологию Flick Stick (объясняется ниже). Самые серьёзные игроки могут включить «Доп. параметры гироскопа», чтобы открыть множество других настроек, например независимые параметры осей вращения или даже добавление кнопки для инвертирования прицеливания с гироскопом на лету!
А вот и Flick Stick!
Мы добавили Flick Stick, чтобы дополнить впечатления от использования гироскопа! На вкладке «Сенсор и движение» также можно включить функцию Flick Stick, чтобы при наклоне правого мини-джойстика в определенном направлении камера быстро поворачивалась в ту же сторону. Использование технологии Flick Stick не позволяет поднимать или опускать камеру с помощью правого мини-джойстика, поэтому вам необходимо включить функцию «Прицеливание с помощью гироскопа».
Использование технологии Flick Stick не позволяет поднимать или опускать камеру с помощью правого мини-джойстика, поэтому вам необходимо включить функцию «Прицеливание с помощью гироскопа».
Технология Flick Stick обычно рекомендуется опытным игрокам с гироскопом, но некоторые новички осваиваются с ней довольно быстро.
Советы по использованию гироскопа в Fortnite
Хотите поиграть в Fortnite с гироскопом? Вот несколько советов от самого Jibb!
Новым пользователям гироскопа мы рекомендуем включить гироскоп и сначала не настраивать другие параметры гироскопа (кроме чувствительности, если вы ощущаете необходимость в её изменении). Мы также рекомендуем оставлять технологию Flick Stick отключённой. Когда гироскоп включён, а другие настройки выставлены по умолчанию, гироскоп активен только во время прицеливания. Таким образом, он просто добавляется к традиционному прицеливанию с помощью мини-джойстика, давая вам возможность привыкнуть к тому, что у гироскопа получается лучше всего, — тонкой корректировке прицеливания.
Опытным пользователям гироскопа мы рекомендуем выбрать значение «Всегда» для режима прицеливания и назначить отключение гироскопа на другую кнопку. Простой способ сделать это без потери функциональности геймпада — это объединить его с другой кнопкой. Например, вы можете назначить действия «Пригнуться/скользить» и «Модификатор гироскопа» (который отключает гироскоп) на одну и ту же кнопку, а затем активировать любое из них в зависимости от того, как долго вы нажимаете кнопку.
Игрокам, желающим попробовать Flick Stick, мы рекомендуем выбрать значение «Включает» у параметра «Действие мини-джойстика для обзора». Таким образом, даже в режиме прицеливания, в котором гироскоп не активен все время, вы все равно сможете, когда нужно, сделать вертикальную корректировку, задействовав Flick Stick.
Часто задаваемые вопросы о гироскопе в Fortnite
На каких платформах я могу использовать гироскоп в Fortnite?
Гироскоп в Fortnite доступен на платформах, которые оборудованы гироскопом и поддерживают управление с его помощью. Игроки могут использовать гироскоп в Fortnite на Nintendo Switch, PlayStation 4, PlayStation 5, ПК и устройствах на базе ОС Android.
Игроки могут использовать гироскоп в Fortnite на Nintendo Switch, PlayStation 4, PlayStation 5, ПК и устройствах на базе ОС Android.
Внимание! Гироскоп недоступен при игре в Fortnite через сервис GeForce NOW на ПК и мобильных устройствах.
С какими геймпадами я могу использовать гироскоп в Fortnite?
На Nintendo Switch игроки могут использовать гироскоп с контроллерами Joy-Con (в том числе в мобильном режиме) или контроллером Nintendo Switch Pro.
На PlayStation и ПК игроки могут использовать гироскоп с контроллером DualShock 4 (PlayStation 4) или контроллером DualSense (PlayStation 5).
На Android игроки могут использовать гироскоп вместе со стандартным управлением.
Могу ли я использовать помощь в прицеливании при использовании гироскопа?
Если включена функция «Прицеливание с помощью гироскопа», помощь в прицеливании отключается, когда гироскоп активен.
В каких игровых режимах есть поддержка гироскопа?
Поддержка гироскопа есть во всех трёх игровых режимах Fortnite: «Королевской битве», творческом режиме и «Сражении с Бурей».
Какова разница между «управлением гироскопом» и «управлением движением», которое управление гироскопом заменило на Nintendo Switch и Android?
Управление гироскопом — это улучшенная версия управления движением, которое было в Fortnite на Nintendo Switch и устройствах на базе ОС Android до версии игры 19.30. Хотя управление движением было основано на гироскопе, новое управление с помощью гироскопа имеет дополнительные преимущества. Оно включает в себя значительно больше настроек (что видно из перечня настроек выше), теперь нет принудительного ускорения прицеливания и есть возможность временно отключать в определенных ситуациях. Кроме того, на Nintendo Switch, его теперь не нужно часто калибровать.
Что касается чувствительности, теперь нет необходимости устанавливать разную чувствительность в зависимости от того, ведёте ли вы снайперскую стрельбу или просто прицеливаетесь, поскольку значение на главном ползунке чувствительности теперь автоматически масштабируется в зависимости от уровня приближения.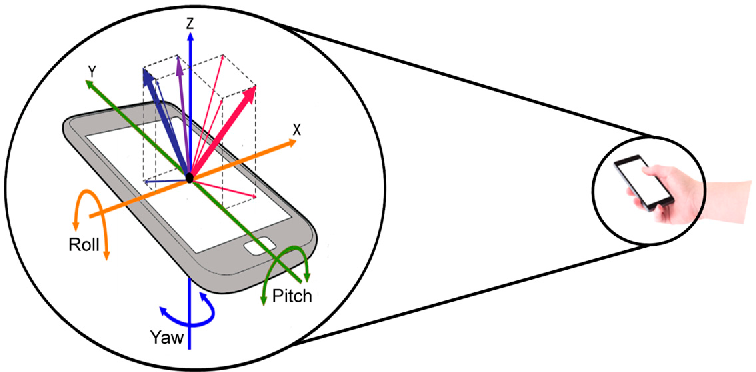 Однако игроки могут отключить зависимость от уровня приближения в разделе «Доп. параметры гироскопа» и установить определенную чувствительность отдельно для снайперской стрельбы, прицеливания, сбора ресурсов, строительства и редактирования.
Однако игроки могут отключить зависимость от уровня приближения в разделе «Доп. параметры гироскопа» и установить определенную чувствительность отдельно для снайперской стрельбы, прицеливания, сбора ресурсов, строительства и редактирования.
Fortnite даёт больше возможностей для игры, чем раньше!
Как включить и настроить гироскоп в Apex Legends Mobile
Apex Legends Mobile официально вышла и, как и другие популярные мобильные шутеры, поддерживает гироскоп. По умолчанию функция отключена, но для ее включения не требуется много времени. Apex Legends Mobile также имеет некоторые параметры конфигурации, чтобы настроить его по своему вкусу. Мы рассмотрим все это и многое другое.
Подробнее: Поддерживает ли Apex Legends Mobile геймпад?
БЫСТРЫЙ ОТВЕТ
Откройте Настройки . Перейдите к Чувствительность и коснитесь вкладки Гироскоп . Измените режим гироскопа на On, когда ADS , чтобы включить его только при прицеливании, или Always On , чтобы он был включен все время.
ПЕРЕХОД К КЛЮЧЕВЫМ РАЗДЕЛАМ
- Как работает гироскоп в Apex Legends Mobile?
- Как включить и отключить гироскоп в Apex Legends Mobile
- Как настроить гироскоп в Apex Legends Mobile
Как работает гироскоп в Apex Legends Mobile?
Joe Hindy / Android Authority
Функция гироскопа позволяет перемещать прицельную сетку по экрану, перемещая телефон, а не проводя пальцем. Это полезно по разным причинам. Это может сильно облегчить прицеливание. Например, вы можете увеличить свою чувствительность, используя палец, чтобы вы могли очень быстро поворачиваться, а затем использовать гироскоп для более точного прицеливания, потому что в противном случае ваша чувствительность была бы слишком высокой.
Не влияет на вашу способность двигать пальцами. Левый джойстик по-прежнему перемещает вас вперед, назад и из стороны в сторону. Пролистывание вправо по-прежнему поворачивает вашу камеру, как обычно. Это просто дает вам возможность поворачивать камеру, вращая или поворачивая телефон. Думайте об этом как о втором правом джойстике.
Это просто дает вам возможность поворачивать камеру, вращая или поворачивая телефон. Думайте об этом как о втором правом джойстике.
Во время тестирования мы обнаружили, что наилучший результат дает включение гироскопа только с ADS, поскольку он может мешать вам во время боя, когда вы к нему не привыкли.
Как включить и отключить гироскоп в Apex Legends Mobile
Joe Hindy / Android Authority
Включить и выключить его довольно просто.
Включить гироскоп
- На главном экране откройте Настройки .
- Оказавшись там, перейдите к Чувствительность . Наконец, коснитесь вкладки Gyroscope в верхнем левом углу.
- Первый вариант должен позволить вам включить эту функцию.
- У вас есть два варианта. Вы можете включить
Отключить гироскоп
- Повторите вышеописанные шаги, за исключением выбора опции Off в настройках гироскопа.
По нашему мнению, его чувствительность немного завышена, поэтому далее мы покажем вам, как его настроить.
Как настроить гироскоп в Apex Legends Mobile
Joe Hindy / Android Authority
Здесь можно попробовать несколько различных настроек. Перейдите к настройкам гироскопа, используя описанные выше шаги, и мы рассмотрим, что делает каждый параметр.
- Invert Horizontal control — Переворачивает движение по оси X. Наклон влево переместит вашу камеру вправо и наоборот.
- Инвертировать вертикальный элемент управления — То же, что и горизонтальный, но переворачивает ось Y вместо оси X.
- Шкала общей чувствительности гироскопа — это базовая настройка чувствительности. Чем выше число, тем большее движение камеры вы испытываете при меньшем наклоне.
- Шкала вертикальной чувствительности гироскопа — То же, что и общая чувствительность, но влияет только на ось Y (вверх и вниз).
- Связанная регулировка чувствительности — Каждая настройка чувствительности ниже этой имеет две отдельные настройки: одну для прицеливания и одну для стрельбы. Связанная регулировка чувствительности связывает их вместе, поэтому регулировка одного показателя одновременно настраивает и другой.
- FPP без ADS — Регулирует чувствительность в режиме от первого лица, когда не прицеливается.
- TPP без ADS — Регулирует чувствительность в режиме от третьего лица, когда не прицеливается.
- 1x-10x Optic ADS — Для экономии места здесь есть регулировки ADS для 1x, 2x, 3x, 4x, 6x, 8x и 10x увеличения, которые все отделены друг от друга. Каждый из них регулирует чувствительность гироскопа при прицеливании из оружия, характерного для этого зума.

По большей части эти настройки являются персональными. Некоторым людям может быть лучше с более высокой чувствительностью, в то время как другим может потребоваться что-то менее чувствительное. Игра по умолчанию использует более высокую чувствительность при меньшем увеличении и более низкую чувствительность при большем увеличении. Это неплохой способ, так как вам понадобится больше возможностей точной настройки снайпера, чем пистолета-пулемета.
Мы также рекомендуем использовать режим стрельбища, чтобы проверить все внесенные вами изменения перед загрузкой в реальную игру. Мы большие поклонники режима стрельбища. Если вы хотите настроить остальные элементы управления, вы можете ознакомиться с нашим руководством здесь.
Читать дальше: Как использовать текстовый и голосовой чат в Apex Legends Mobile
Часто задаваемые вопросы
Каковы наилучшие настройки для гироскопа?
На этот вопрос сложно ответить, потому что все игроки разные. Вообще говоря, вам понадобится более высокая чувствительность для оружия с малым зумом, чтобы вы могли развернуться и поразить более крупных и быстро движущихся противников. Вам понадобится более низкая чувствительность на снайперской дистанции, так как ваша цель меньше и движется медленнее. Кажется, так поступает большинство людей.
Вообще говоря, вам понадобится более высокая чувствительность для оружия с малым зумом, чтобы вы могли развернуться и поразить более крупных и быстро движущихся противников. Вам понадобится более низкая чувствительность на снайперской дистанции, так как ваша цель меньше и движется медленнее. Кажется, так поступает большинство людей.
Вы можете потренироваться и проверить свои настройки в режиме стрельбища, чтобы отрегулировать настройки, не жертвуя своими личными характеристиками.
Почему мой гироскоп работает неправильно?
Это может происходить по разным причинам. Это может быть программная ошибка, которая должна быть исправлена в будущем обновлении. Кажется, это известная проблема с некоторыми устройствами, и здесь есть небольшая группа людей со списком устройств, с которыми у них возникают проблемы.
Однако это не должно мешать вам выполнять обычные действия по устранению неполадок. Попробуйте перезапустить игру, перезагрузить устройство или удалить и переустановить игру. Кроме того, убедитесь, что вы выполнили описанные выше действия и включили гироскоп.
Кроме того, убедитесь, что вы выполнили описанные выше действия и включили гироскоп.
Гироскоп – Thunkable Docs
Гироскоп – Thunkable DocsDrag and Drop
Добро пожаловать To Thunkable
Начало работы
Подписание в
Учебные пособия
Live Test Ваше приложение
Ваши драгоценные проекты Страница
Создание нового проекта
Настройки проекта
Просмотр
Активы
2
2
2
2
2
. Интеграция Figma
🛠️ Компоненты и функции
Компоненты пользовательского интерфейса
Кнопка
Текстовый вход
Список просмотр.
Web Viewer
Switch
Slider
Флажок
Анимация от Lottie
Значок загрузки
Date Вход
Вход
PDF Reader
RATION RATIN
Список просмотра данных
Сетка просмотра данных
Источники данных
Экраны и навигаторы
Навигатор верхней вкладки
Навигатор нижней вкладки
Drawer Navigator
Stack Navigator
Screen
Monetization
Ads by AdMob
Gaming
Canvas
Sprites
Sprite Gallery
Canvas Label
Gaming Blocks 🎮
Events
Motion
Direction
Датчики
Добавить и удалить
Этикетка холста
Основные блоки
Управление
Объекты
Устройство
переменные
Функции
Приложение Performs
Гироскоп
Магнитометр
Акселерометр
Датчик местоположения
Речь
Камера
Электронная почта. API
API
Покупка в приложении
Bluetooth Low Energy
Помощник от Dialogflow
Блоки «Любой компонент»
🖥️ Службы приложений и эмуляторы
Конфиденциальность данных приложения
Дублируйте свой проект
Загрузка
Публикация
Публикация в App Store (iOS)
Публикация в Play Store (Android) с помощью AAB
Устранение неполадок
Управление хранилищем
Примечания к выпуску
Ошибки и запросы функций
Powered By GitBook
Гироскоп
Гироскоп способен измерять скорость поворота телефона. Он измеряет скорость вращения телефона и возвращает значения в радианах в секунду относительно оси x, оси y и оси z. Эта скорость вращения также известна как Угловая скорость, , чтобы гироскоп мог сказать нам скорость вращения телефона. В более широком смысле, если скорость вращения больше 0, мы можем сделать вывод, что телефон поворачивается.
Оси x, y и z стандартного смартфона
Чтобы добавить гироскоп в ваше приложение:
1
.
Перейдите на вкладку Блоки вашего проекта
- 2
.
Найдите ящик блоков датчиков и щелкните символ ⊕, чтобы добавить датчик в свое приложение
3
.
Select Gyroscope из меню, которое появляется
Вы увидите панель настроек, где вы можете установить:
Название из гироскопа
.

Вы можете либо подтвердить свой выбор и создать гироскоп, либо удалить гироскоп.
Изменение настроек гироскопа
Вы увидите датчики, которые вы добавили в свое приложение, под разделом «Датчики» ваших блоков.
Если щелкнуть значок ⚙ рядом с гироскопом, вы сможете изменить его настройки, как показано на панелях выше. Вы можете нажать на имя вашего гироскопа, чтобы получить доступ к его ящику блоков.
Свойство
Описание
Тип данных
Включен
Toggle, работает ли компонент в вашем приложении
True/False
События
, когда это изменяется. вращается,
ИзмененияСобытие будет запущено.Функции
Call Alpha/Beta/Gamma, Call x/y/z
Свойство
Описание
Номер
Вращение около оси Y
Номер
Ротация о x-A-Axis
Номер
.
 Число
ЧислоВращение вокруг оси Z
Свойство
Описание
Число
Угловая скорость относительно оси X
Число
Угловая скорость относительно оси Y
Число
Угловая скорость относительно оси Z
Установить/получить свойства
По умолчанию датчик гироскопа включен, но свойство , включенное в
, может использоваться для чтения и записи новых значений в гироскоп, таким образом позволяя вам включить или выключить его.Назад
Функции приложения
Магнитометр
Последнее изменение 7 месяцев назад
Экспорт в формате PDF
Скопировать ссылку
На этой странице
Описание
Добавление гироскопа в ваше приложение
Изменение настроек гироскопа
Свойства
Блоки
События
Функции
Установить/получить свойства
Гироскоп · Справочное руководство по reWASD
Обратите внимание, что многие контроллеры с гироскопом автоматически перекалибруются каждый раз, когда вы подключаете их к ПК.
 Поэтому перед подключением контроллера убедитесь, что он не вращается и не движется, а просто лежит неподвижно в течение нескольких секунд после подключения к ПК.
Поэтому перед подключением контроллера убедитесь, что он не вращается и не движется, а просто лежит неподвижно в течение нескольких секунд после подключения к ПК.Начиная с версии reWASD 5.6.1, вы можете добавлять сопоставления виртуального гироскопа DS4 к любому контроллеру, который физически имеет гироскоп. Если вы используете волшебную палочку для назначения виртуального контроллера DS4, прямо сейчас к нему также будут добавлены сопоставления гироскопа. Если вы хотите добавить все сопоставления Virtual DS4, кроме гироскопа, вам нужно будет выбрать значок гироскопа и выбрать Mute . Обязательно сделайте это, если вы хотите добавить другие сопоставления к гироскопу
.Начиная с версии reWASD 5.8, вы можете использовать функцию Flick Stick вместе с прицеливанием по гироскопу.
Начиная с версии reWASD 6.0, вы можете выбрать исходное состояние Gyro в Настройках — Геймпады.
Важное примечание: если вы создали группу из нескольких контроллеров с гироскопом и применили конфигурацию с сопоставлениями виртуальных гироскопов, только первый контроллер в группе будет иметь назначенный ему виртуальный гироскоп, независимо от того, сколько подконфигураций вы имеют.

Гироскопические движения
Gyro — это не то, как вы перемещаете свой контроллер, а то, как вы его вращаете. Используя Gyro, вы можете вращать геймпад по трем осям. У них есть уникальные названия, унаследованные от осей самолетов: крен, рыскание и тангаж. Обратите внимание, что эти оси движутся вместе с контроллером, поэтому в зависимости от того, как вы держите его в руке, движения могут немного отличаться.
Ось крена
Если вы хотите осмотреться, по умолчанию вам понадобится рулон ось. Вот как нужно перемещать геймпад:
Обратите внимание, что если вы лежите и геймпад «носом» направлен вверх, то геймпад нужно двигать так же (выдвинув вперед правую руку и подтянув к себе левую руку, вы будете смотреть вправо):
Шаг оси
Если вы хотите посмотреть вверх или вниз, используйте шаг ось. Нужно поднять «носик» геймпада вверх или опустить вниз:
То же движение нужно сделать, если «нос» контроллера «смотрит» вверх.
 Но в этом случае нужно сдвинуть «нос» к себе или от себя:
Но в этом случае нужно сдвинуть «нос» к себе или от себя:Ось рыскания
Когда геймпад лежит на столе, движение по третьей оси — рыскание — похоже на вращение:
Если «нос» геймпада направлен вверх, движение аналогично рулевому управлению:
По умолчанию в reWASD, в режиме Gyro , рыскание означает отображение Lean, а вращение используется для осмотра. Однако вы можете поменять оси местами с помощью соответствующей команды — Переключить ось гироскопа или выбрать ось управления по умолчанию (будь то Yaw или Roll ) в Настройках — Общие. В режиме Tilt крен используется как ось управления, когда «нос» геймпада смотрит вперед, а рыскание используется как ось управления, когда «нос» геймпада смотрит вверх.
Как настроить отображение гироскопа
reWASD позволяет устанавливать сопоставления с гироскопом, начиная с версии 5.
 3.0. Функциональность доступна для DualShock 4, Nintendo Switch Pro, Joy-Cons и нескольких клонов Nintendo, которые физически имеют гироскоп. Чтобы настроить сопоставления, выполните следующие действия:
3.0. Функциональность доступна для DualShock 4, Nintendo Switch Pro, Joy-Cons и нескольких клонов Nintendo, которые физически имеют гироскоп. Чтобы настроить сопоставления, выполните следующие действия:- Щелкните символ гироскопа в любом направлении
- Установите предпочтительный режим: Гироскоп или Наклон . В режиме Gyro отображение прекращается, когда вы перестаете перемещать контроллер. Это лучше для движения камеры, однако это может зависеть от ваших личных предпочтений и типа игры. В В режиме Tilt весь контроллер превращается в большую «палку», поэтому для получения максимальной отдачи вам нужно переместить контроллер в правильный угол, а чтобы вернуться в мертвую зону, вам нужно вернуть его в устойчивое положение. государство. Этот режим идеально подходит для гоночных игр
- Выберите сопоставление reWASD для одного направления или используйте групповые сопоставления, чтобы упростить этот процесс
- В противном случае вы можете добавить комбинацию клавиш к выбранному направлению
- Перейдите в Дополнительные настройки, чтобы настроить дополнительные параметры
Расширенные настройки гироскопа зависят от режима.

В расширенных настройках режима
Gyro вы сможете:Установите Отклик гироскопа, используя список пресетов или кривую. Горизонтальная ось кривой показывает, насколько быстро вы перемещаете контроллер. Вертикальная ось обозначает отображения. Если стик привязан к гироскопу, минимальная точка — это мертвая зона стика, а максимальная точка — максимальное отклонение.
Инвертировать Y или ось X гироскопа. По умолчанию вам нужно переместить «нос» геймпада вверх, чтобы посмотреть вверх, и повернуть геймпад вправо, чтобы посмотреть вправо. Если вам это не удобно, вы можете инвертировать определенную ось. Обратите внимание, что вы инвертируете отображение, в то время как оси рыскания, тангажа и крена гироскопа остаются прежними.
Установить Наклон влево и Наклон вправо отображения. По умолчанию Lean представляет собой вращение вокруг вертикальной оси.
 Вы можете поменять местами оси с помощью соответствующей команды — Переключить ось гироскопа или выбрать ось управления по умолчанию (будь то Yaw или Roll ) в Preferences — General. Здесь можно сопоставить любую клавиатуру, мышь, геймпад, добавить комбо или команду.
Вы можете поменять местами оси с помощью соответствующей команды — Переключить ось гироскопа или выбрать ось управления по умолчанию (будь то Yaw или Roll ) в Preferences — General. Здесь можно сопоставить любую клавиатуру, мышь, геймпад, добавить комбо или команду.Изменить Форма зоны . В режиме Gyro зона зависит от того, как быстро вы вращаете геймпад. Серая зона — мертвая зона — обозначает самые медленные движения, которые не будут зарегистрированы reWASD. Обратите внимание, что лучше свести к минимуму мертвую зону для режима Gyro , в противном случае вам нужно будет сильно надавить на контроллер, чтобы получить результат.
Начиная с reWASD 5.3, мы добавили возможность видеть значение на ползунках зоны. Чтобы увидеть значение, поместите курсор на ползунок. Это поможет настроить параметры еще точнее. Начиная с версии reWASD 5.5, вы можете вводить значения вручную с помощью полей Точная настройка .

Также можно изменить форму Зеленой (низкой), Желтой (средней) и Красной (высокой) зон. Хорошей идеей будет использовать верхнюю зону для какого-нибудь редкого отображения, если вы ничего не сопоставляете с направлениями гироскопа на первом шаге. Таким образом, вы сможете эмулировать некоторые комбинации при быстром вращении контроллера вдоль любой оси.
Начиная с версии reWASD 5.5, мы добавили возможность добавлять сопоставления зон гироскопа для разных направлений. Выберите необходимое Направление (доступны варианты All, Left, Right, Up, Down, Lean left, Lean right), затем выберите Zone и добавьте сопоставление, комбо или вибрацию To .
По завершении нажмите Назад в верхней части левого списка настроек, чтобы вернуться к основному виду. Нажмите Настройки по умолчанию , чтобы сбросить гироскоп в состояние по умолчанию.

В дополнительных настройках режима
Tilt вы сможете:Установите Отклик гироскопа, используя список пресетов или кривую. Горизонтальная ось кривой соответствует физическому перемещению контроллера. Отправной точкой является поворот на нулевой угол. Максимальная точка — прямой угол — 90 градусов. Вертикальная ось обозначает отображения. Если у вас есть стик, сопоставленный с гироскопом, минимальная точка — это мертвая зона стика, а максимальная точка — это максимальное отклонение. Кривая по умолчанию позволяет получить максимальное отклонение при повороте геймпада примерно на 30 градусов.
Инвертировать Y или ось X гироскопа. По умолчанию вам нужно переместить «нос» геймпада вверх, чтобы посмотреть вверх, и повернуть геймпад вправо, чтобы посмотреть вправо. Если вам это не удобно, вы можете инвертировать определенные оси. Обратите внимание, что вы инвертируете отображение, в то время как оси рыскания, тангажа и крена гироскопа остаются прежними.

Изменить Форма зоны . В режиме Tilt зона зависит от того, как далеко вы поворачиваете геймпад. Серая зона — мертвая зона — обозначает движения, которые не будут зарегистрированы reWASD. Сведите к минимуму мертвую зону, если вам нужно получить выходной сигнал при небольшом вращении контроллера, и увеличьте ее, если вы чувствуете себя некомфортно, пытаясь установить гироскоп в устойчивое положение.
Начиная с reWASD 5.3, мы добавили возможность видеть значение на ползунках зоны. Чтобы увидеть значение, поместите курсор на ползунок. Это поможет настроить параметры еще точнее. Начиная с версии reWASD 5.5, вы можете вводить значения вручную с помощью полей Точная настройка .
Также можно изменить форму Зеленой (низкой), Желтой (средней) и Красной (высокой) зон.
Начиная с версии reWASD 5.5, мы добавили возможность добавлять сопоставления зон гироскопа для разных направлений.
 Выберите нужный Направление (доступны варианты Все, Влево, Вправо, Вверх, Вниз), затем выберите Зону и добавьте сопоставление, комбо или вибрацию К ей.
Выберите нужный Направление (доступны варианты Все, Влево, Вправо, Вверх, Вниз), затем выберите Зону и добавьте сопоставление, комбо или вибрацию К ей.
По завершении нажмите Назад в верхней части левого списка настроек, чтобы вернуться к основному виду. Нажмите Настройки по умолчанию , чтобы сбросить гироскоп в состояние по умолчанию.
Команды, связанные с гироскопом
С помощью трех встроенных команд вы можете управлять гироскопом в игре. Прежде чем начать, сопоставьте нужную команду с любой кнопкой контроллера, активатором или ярлыком.
Обратите внимание, что команды действуют только на то устройство, которое их активировало, поэтому, если сгруппировано несколько геймпадов, для каждого нужны отдельные команды.
Переключатель оси гироскопа рулевого управления
Эта команда используется для переключения рысканья и крена в режиме гироскопа.
 Обратите внимание, что для осмотра reWASD по умолчанию использует оси крена. Удобно, когда «нос» геймпада смотрит вперед, пока ты сидишь с геймпадом. Для тех, кто играет лежа, рыскание будет лучшим выбором. Вам нужно будет активировать Переключение оси гироскопа каждый раз, когда вы применяете свою конфигурацию. Также вам может понадобиться эта команда, если вы меняете позицию во время игры.
Обратите внимание, что для осмотра reWASD по умолчанию использует оси крена. Удобно, когда «нос» геймпада смотрит вперед, пока ты сидишь с геймпадом. Для тех, кто играет лежа, рыскание будет лучшим выбором. Вам нужно будет активировать Переключение оси гироскопа каждый раз, когда вы применяете свою конфигурацию. Также вам может понадобиться эта команда, если вы меняете позицию во время игры.Ось, которая «свободна» от рулевого управления, используется для отображения Lean. Вы можете установить их в дополнительных настройках режима гироскопа.
Что касается команды Переключить ось гироскопа, то команда используется нечасто, мы рекомендуем сопоставить ее с активатором Shortcut или Triple Press.
Сброс наклона
Эта команда переводит «джойстик» в устойчивое положение в режиме наклона. Мы советуем вам использовать его каждый раз, когда вы начинаете играть. Сядьте в удобное положение, держите контроллер как можно более естественно, затем активируйте Reset Tilt , чтобы reWASD знал, что это нулевая позиция.
 Когда вы закончите свою игру, положите контроллер на стол и снова нажмите активатор Reset Tilt , так мы перестанем эмулировать маппинги.
Когда вы закончите свою игру, положите контроллер на стол и снова нажмите активатор Reset Tilt , так мы перестанем эмулировать маппинги.Так же может понадобиться Reset Tilt если не получается вернуть гироскоп в мертвую зону. Однако в этом случае рассмотрите возможность увеличения мертвой зоны в дополнительных настройках режима Tilt .
Включение/выключение гироскопа
Эту команду можно использовать для обоих режимов. Пока вы нажимаете его активатор в первый раз, все отображения гироскопа останавливаются. Пока вы нажимаете ее во второй раз, сопоставления работают как обычно. В Режим наклона , гироскоп будет сбрасываться в нулевое положение каждый раз, когда вы включаете гироскоп с помощью этой команды.
Вы также можете нажать и удерживать кнопку, чтобы выключить гироскоп. В этом случае вам нужно дважды сопоставить эту команду с активаторами Start и Release.
Включение и выключение гироскопа
Эти команды могут использоваться для любых режимов и позволяют изменять состояние отображений гироскопа.

Калибровка гироскопа
Начиная с версии reWASD 5.6, вы можете калибровать гироскоп на вашем контроллере. Чтобы начать калибровку, подключите контроллер с гироскопом, выберите его в списке устройств reWASD (нижний левый угол), щелкните правой кнопкой мыши выделенный значок и выберите 9.0005 Калибровка :
reWASD автоматически калибрует гироскоп, но если вы чувствуете, что отображения гироскопа нестабильны, вы можете откалибровать гироскоп вручную. Для этого снимите Автокалибровка и нажмите Далее :
Держите геймпад устойчиво в любом положении, самое главное не поворачивайте и не перемещайте контроллер во время его калибровки reWASD. Нажмите Далее , когда будете готовы к калибровке:
Подождите несколько секунд, пока не завершится калибровка:
○ Форум reWASD ○ Запрос в службу поддержки ○ Страница Facebook ○ Текстовый чат Discord ○
Как работает кольцевой лазерный гироскоп?
Кольцевые лазерные гироскопы являются результатом более чем 100 лет исследований, разработок и экспериментов в области навигационных технологий.
 Они необходимы для обеспечения безопасности полетов, уменьшения человеческих ошибок, точности и многого другого как в пилотируемых, так и в беспилотных летательных аппаратах.
Они необходимы для обеспечения безопасности полетов, уменьшения человеческих ошибок, точности и многого другого как в пилотируемых, так и в беспилотных летательных аппаратах.Первый лазерный гироскоп был экспериментально продемонстрирован в 1963 г. В.М. Мацек и Д.Т.М. Дэвиса, самый первый пригодный для использования гирокомпас восходит к 1904 году и был изобретен немецким изобретателем Германом Аншютц-Кемпфе. С тех пор гироскопы прошли долгий путь развития от механических до оптических автономных лазерных технологий, таких как кольцевой лазерный гироскоп Honeywell или RLG.
Что такое кольцевой лазерный гироскоп?
Гироскопы — это устройства, используемые для измерения и поддержания ориентации объекта в инерциальном пространстве в любой момент времени. До технологии RLG механические гироскопы были нормой. Механический гироскоп основан на принципе сохранения углового момента, который гласит, что , если на систему не действует внешний вращающий момент, полный угловой момент системы остается постоянным.
 Это означает, что вращающийся объект будет продолжать вращаться вокруг оси, если не будет приложен внешний крутящий момент. Угловой момент является важной физической характеристикой, которую нельзя создать или уничтожить, а можно только передать.
Это означает, что вращающийся объект будет продолжать вращаться вокруг оси, если не будет приложен внешний крутящий момент. Угловой момент является важной физической характеристикой, которую нельзя создать или уничтожить, а можно только передать.Механические гироскопы состоят из диска или вращающегося колеса с осью, принимающей любую ориентацию. Ориентация быстро меняется при приложении внешнего крутящего момента, однако, когда гироскоп установлен на подвесе, крутящий момент минимизируется, и, таким образом, ось вращения, определяемая осью, стабилизируется.
Кольцевые лазерные гироскопы являются современным отраслевым стандартом и подчиняются эффекту Саньяка для чувственной ориентации, который проявляется в кольцевом интерферометре. В интерферометре изначально устанавливается кольцевой лазерный гироскоп. Интерферометры — это исследовательские инструменты, которые работают путем наложения двух или более источников света для создания интерференционной картины, которая затем отслеживается и анализируется.
 Интерферометры обычно используются для высокочувствительных измерений, которые не могут быть достигнуты другими способами, такими как идентификация вариаций микроскопических организмов или обнаружение гравитационных волн, и имеют широкое применение.
Интерферометры обычно используются для высокочувствительных измерений, которые не могут быть достигнуты другими способами, такими как идентификация вариаций микроскопических организмов или обнаружение гравитационных волн, и имеют широкое применение.Интерферометр, используемый для кольцевого лазерного гироскопа, состоит из узких туннелей, которые образуют замкнутый круг, окружающий блок стекла с нулевым коэффициентом расширения, изготовленного из оксидов лития, алюминия и кремния. Для создания интерференционной картины для эффекта Саньяка в каждой вершине размещают по три зеркала, а в активном резонаторе формируют два встречных лазерных луча.
Хотя лучи идут в разных, противоположных направлениях, они входят и выходят в одной и той же точке, что позволяет интерферометру измерять собранный сигнал в момент выхода.
Когда кольцевой лазерный гироскоп находится в движении, лучи света проходят разные расстояния. Разница в частоте пропорциональна скорости вращения. Разность частот измеряется с помощью картины интерференционных полос, фаза которой содержит информацию о направлении.

Кольцевые лазерные гироскопы для инерциальной навигации
Кольцевые лазерные гироскопы легкие, компактные и автономные, что исключает трение. Это большое преимущество, особенно для инерциальных навигационных систем (ИНС). Отсутствие движущихся частей и небольшой вес не позволяют им создавать дополнительное сопротивление системе, в которой они установлены.
Кроме того, современные лазерные кольцевые гироскопы значительно меньше, чем предыдущие модели, что делает их идеальным выбором для сложных и чувствительных технологий, таких как инерциальные навигационные системы, где ключевыми факторами являются точность, надежность и эффективное использование пространства.
INS — это системы наведения для кораблей, космических кораблей, самолетов и ракет, которые помогают поддерживать точное положение в ситуациях и условиях, когда невозможно использовать технологию GPS. Для аэронавигации используются два типа ИНС – стабилизированная платформа и бесплатформенная ИНС.

ИНС со стабилизированной платформой содержат три или более акселерометров, а также три или более гироскопов с вращающейся массой на карданном подвесе, которые поддерживают выравнивание и устойчивость платформы во время движения самолета.
Бескаркасные ИНС также содержат акселерометры и гироскопы, как и RLG, однако они крепятся ремнями к раме самолета. Это устраняет необходимость в подвесах, используемых в ИНС со стабилизированной платформой, которые обычно имеют проблемы с надежностью.
Кольцевые лазерные гироскопы для транспортных систем
Благодаря своим уникальным свойствам кольцевые лазерные гироскопы привлекают все больше внимания в отрасли транспортных систем. Кольцевые лазерные гироскопы небольшие, компактные, легкие и устойчивые к радиации. На сегодняшний день они в основном используются в воздушных и космических аппаратах, однако растет интерес к ИНС и в других транспортных системах, что позволяет рынку гироскопов развиваться быстрее, чем когда-либо прежде.

Благодаря превосходной точности и стабильности работы кольцевые лазерные гироскопы также широко используются в военных операциях, особенно в ракетной навигации, а также в военных самолетах и наземных транспортных средствах.
Сегодня цифровой RLG Honeywell GG1320 является отраслевым стандартом для точного измерения вращения. Это недорогой, высокопроизводительный инерциальный датчик с электроникой, блоком питания и чувствительным элементом, объединенными в простой в использовании компактный блок. Он обеспечивает вывод компенсированного измеренного вращения в виде потока цифровых данных.
Помимо кольцевых лазерных гироскопов (RLG), гироскопические технологии Honeywell включают волоконно-оптические гироскопы (FOGS) и гироскопы микроэлектромеханических систем (MEMS).
Гироскоп | Space Engineers Wiki
Добавление блоков Gyroscope в мобильную сетку позволяет игроку контролировать ориентацию кораблей. На ПК гироскопы добавляют возможность перемещать мышь для управления шагом и рысканием сетки, а также использовать клавиши Q и E для вращения.
 Вращение сосредоточено в центре масс.
Вращение сосредоточено в центре масс.Рыскание Шаг Рулон Гироскопам для работы требуется питание, и они очень тяжелые. При их размещении космическому инженеру необходимо найти эффективный баланс между массой и скоростью поворота для каждого корабля.
- Подробную информацию об эффектах этого блока см. в разделе «Механика гироскопа».
Содержимое
- 1 Применение
- 2 Баланс скорости и массы
- 3 Размещение и размер
- 4 Энергопотребление
- 5 Блокировка гироскопа
- 6 Рецепт
- 7 Галерея
Использование
Гироскопы управляют тангажем, рысканьем и креном с помощью мыши.
- При управлении марсоходом они позволяют поворачивать влево/вправо и корректировать крен/тангаж, когда вы ловите воздух, с помощью мыши.
- Блок дистанционного управления использует гироскопы для автопилота.
- В десантной капсуле или поврежденном корабле, которому не хватает тяги в некоторых направлениях, вращение гироскопа позволяет опытному пилоту вручную применить оставшуюся тягу в нужном направлении.
Типичные варианты использования переопределений гироскопа:
- стабилизирующие шагающие механизмы и вездеходы (тормозной момент)
- стабилизирующие вездеходы и гоночные автомобили (тормозной момент)
- остановка вращения космического корабля после столкновения с астероидом (тормозной момент)
- однократное вращение перевернутой машины (крутящий момент)
- непрерывное вращение космической станции (крутящий момент)
Баланс скорости и массы
Эффективность гироскопов пропорциональна количеству работающих гироскопов на борту и обратно пропорциональна массе корабля. Это означает, что установка дополнительных гироскопов на судно ускорит его рыскание, тангаж и крен.
 Однако, когда вы увеличиваете массу, которую должны будут перемещать гироскопы (путем добавления гироскопов, двигателей, механизмов, структурной брони и т. д.), скорость реакции корабля снова снизится.
Однако, когда вы увеличиваете массу, которую должны будут перемещать гироскопы (путем добавления гироскопов, двигателей, механизмов, структурной брони и т. д.), скорость реакции корабля снова снизится.Несмотря на то, что он является центральным элементом инерционных демпферов корабля, гироскоп сам по себе не может изменить скорость космического корабля. Чтобы инерционные гасители работали полностью, помните, что на корабле должно быть по крайней мере по одному подруливающему устройству, обращенному в каждом направлении (вперед, назад, влево, вправо, вверх и вниз).
На экране панели управления в разделе «Питание» вы можете настроить чувствительность гироскопа к вращению от 100% до 0% (выкл.). Хорошо настроенные настройки гироскопа позволяют очень маленьким кораблям реагировать на входные сигналы точным поворотом, а не резким рывковым вращением.
Размещение и размер
Гироскоп занимает блок размером 1x1x1 как на малых, так и на больших кораблях. Он прикрепляется к блокам только своей нижней лицевой стороной.
 Это означает, что гироскопы относительно уязвимы к поломке, когда разрушаются их единственные блоки крепления, что может внезапно лишить корабль его маневренности.
Это означает, что гироскопы относительно уязвимы к поломке, когда разрушаются их единственные блоки крепления, что может внезапно лишить корабль его маневренности.Гироскопы больших кораблей имеют панель управления на передней стороне, у гироскопов малых кораблей эта панель управления отсутствует, поэтому доступ к их настройкам можно получить только с экрана панели управления кабины или пульта дистанционного управления.
Передняя гироскопа (для крупной сетки, где панель управления) определяет, где какая ось вращения будет. Легче настроить, если гироскоп направлен в ту же сторону, что и кабина, иначе оси будут казаться неправильно помеченными, что доставляет небольшое неудобство при настройке переопределений.
Подобно двигателям, гироскопы воздействуют на центр масс, независимо от того, где на сетке вы их размещаете. С другой стороны, из-за их большой массы процесс их размещения неизбежно приведет к смещению центра масс, вокруг которого они вращаются.

Совет: Чтобы увидеть, где находится ваш центр масс, откройте информационный экран и включите параметр «Показать центр масс» во время строительства.
Вращение кажется более интуитивным, когда центр масс находится там, где пилот воспринимает центр корабля или где находится кабина. Так что следите за центром масс, пока вы размещаете свои гироскопы, и убедитесь, что он заканчивается там, где вы ожидаете, а не смещается в одну сторону.
Энергопотребление
Гироскопы потребляют лишь незначительное количество энергии, независимо от того, находится ли корабль в состоянии покоя или его заставляют вращаться. Версия для больших кораблей потребляет примерно 30 Вт при полной мощности, тогда как версия для малых судов потребляет всего 0,6 Вт, т. е. 1/50 мощности. Трудно оценить точные цифры из-за зависимости от выходной мощности при пилотировании корабля.
Переопределение гироскопа
На экране панели управления в разделе Элементы управления переопределением можно создать вращающий или тормозной момент вдоль оси (тангаж, рыскание или крен).
 Переопределенный гироскоп заставит (или предотвратит) вращение транспортного средства вокруг выбранной оси с центром в центре масс. Вы можете сказать, какие гироскопы переопределены, потому что они светятся синим цветом. Переопределенные гироскопы больше не доступны для управления мышью.
Переопределенный гироскоп заставит (или предотвратит) вращение транспортного средства вокруг выбранной оси с центром в центре масс. Вы можете сказать, какие гироскопы переопределены, потому что они светятся синим цветом. Переопределенные гироскопы больше не доступны для управления мышью.Можно даже включить вращение вокруг двух или трех осей или удвоить усилие вокруг одной оси. Чтобы это было удобно для пользователя на экране панели управления, рекомендуется, чтобы все гироскопы были обращены одинаково, чтобы их оси были помечены одинаково. Если это не так, вам нужны пробы и ошибки, чтобы найти правильную комбинацию осей.
Значение RPM (оборотов в минуту) определяет, будет ли гироскоп вращаться сильно или медленно. Медленно увеличивайте значение переопределения, поскольку внезапные мощные переопределения могут повредить автомобиль.
- По умолчанию Управление блокировкой отключено. Игрок управляет вращением этого гироскопа с помощью мыши и клавиатуры.
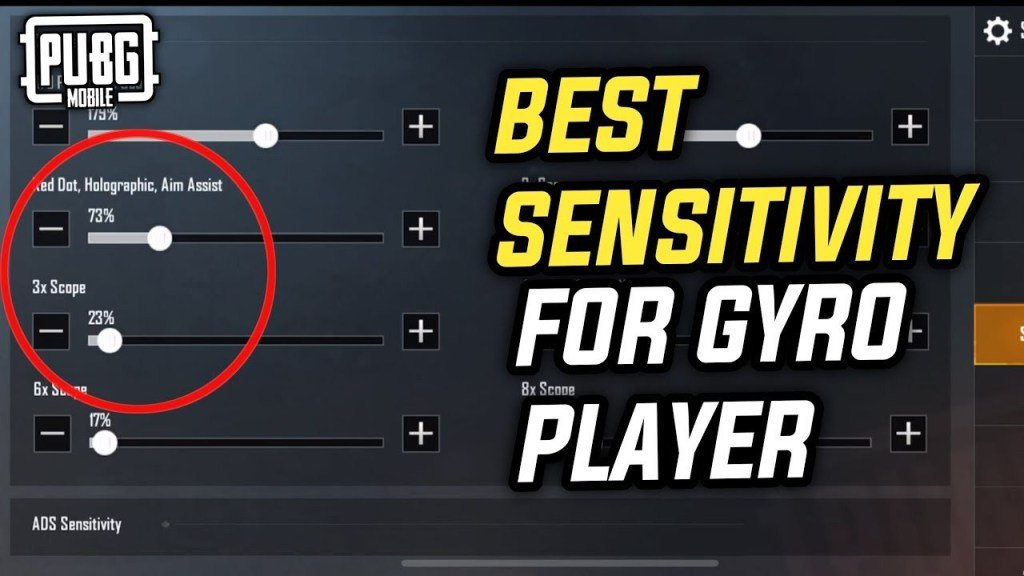
- Если Override Controls включен, а число оборотов равно 0, гироскоп применяет постоянный стабилизирующий тормозной момент на этой оси.
- Если Override Controls включен, а RPM установлено на ненулевое значение между +30 и -30, гироскоп применяет крутящий момент.
Если на транспортном средстве установлено два или более гироскопов, вы можете настроить их по-разному. Некоторые примеры:
- На одном или нескольких отключите блокировку и используйте их для ручного управления транспортным средством.
- В другом случае включите переопределение и оставьте все ползунки RPM на 0, и используйте его для автоматической стабилизации.
- Примечание. Если вы установите для двух гироскопов корректировки вдоль одной и той же оси на противоположные значения (например, один гироскоп на рыскание +10 об/мин, а другой -10 об/мин), они компенсируют друг друга, и ничего не произойдет.
Recipe
Gyroscope Component Large Ship/Station
RequiredLarge Ship/Station
OptionalSmall Ship
RequiredSmall Ship
OptionalMetal Grid 50 — — — Computer 5 — 3 — Motor 4 — 2 - Большая стальная труба 4 - 1 - Файл: ICON Component.  png Construction.png.0874
png Construction.png.0874— 5 — Steel Plate 500 100 15 10 Gallery
Gyroscope for large ships.
Гироскоп для малых судов.
Блоки Структурные блоки
Armor
Blast Door, Blast Door Corn Угол брони, наклон легкой брониКолеса
Колесо 1x1, Колесо 3x3, Колесо 5x5Windows
Диагональное окно, Вертикальное окно, Окно 1x1, грань, Window 1x1 Flat, Window 1x1 Flat Inv, Window 1x1 Inv, Window 1x1 Side, Window 1x1, наклон, Window 1x2 Face, Window 1x2 Flat, Window 1x2 Flat Inv, Window 1x2 Flat Inv, Window 1x2 Flat Inv, Window 1x1 Flat Inv Inv, Window 1x2, левая сторона, Window 1x2, правая сторона, Window 1x2, наклон, Window 2x3, плоская, Window 2x3, плоская Inv, Window, 3x3, плоская, Window 3x3, плоская, InvЭстетика
Стена с полным покрытием, Стена с половинным покрытием, Внутренняя колонна, Внутренняя стена, Проход, Пандус, Лестница, Стальной подиумФункциональные блоки
Кабины и управление
Кабина, кабина истребителя, пост управления, летное кресло, пассажирское сиденье, панель управления, кнопочная панель, дистанционное управление, настраиваемый контроллер турелиАвтоматизация и связь
Антенна, Маяк, Камера, Лазерная антенна, Детектор руды, Программируемый блок, Датчик, Блок таймераЗащита
Приманка, Пушка Гатлинга, Турель Гатлинга, Внутренняя турель, Ракетная турель, Перезаряжаемая ракетная установка, Ракетная установка, Боеголовка, Артиллерия, Автопушка, Артиллерийская турель, Турель с автопушкой, Рейлган, Штурмовая пушка, Турель ШтурмоваяЭнергия
Батарея, Малая батарея, Большой реактор, Малый реактор, Панель солнечных батарей, Водородный двигатель, Ветряная турбинаМаневрирование
Гироскоп , Атмосферный двигатель, Ионный двигатель, Водородный двигатель, Подвеска колеса 1x1, Подвеска колеса 3x3, Подвеска колеса 5x5Горнодобывающая и обрабатывающая промышленность
Базовый нефтеперерабатывающий завод, Сборщик, Базовый сборщик, Дрель, Блок измельчения, Нефтеперерабатывающий завод, Блок сварщика, Проектор, Генератор O2/h3, Кислородная фермаХранение
Большой грузовой контейнер, Средний грузовой контейнер, Малый грузовой контейнер, Кислородный бак, Водородный бакУправление запасами
Соединитель, Коллектор, Выталкиватель, Сортировщик конвейера, Соединение конвейера, Рама конвейера, Трубка конвейера, Изогнутая труба конвейера, Малый конвейер, Малая трубка конвейера, Малая изогнутая трубаМеханические блоки и управление гравитацией
Усовершенствованный ротор, Ротор, Поршень, Шарнир, Шасси, Магнитная пластина, Искусственная масса, Генератор гравитации, Генератор сферической гравитации, Безопасная зонаРазное
Блок слияния, Медицинский кабинет, Набор для выживания, Внутреннее освещение, Прожектор, Дверь, Лестница, Магазин, Блок контрактовУдаленные блоки
Взрывной куб
Quanser Produkte & Lösungen / made|for|science GmbH
Für mehr Effizienz im Hörsaal: Bei uns erhalten Sie die steuer- und regeltechnischen Versuchsaufbauten von Quanser – совершенный zugeschnitten auf die ingenieurwissenschaftliche Ausbildung und Forschung.
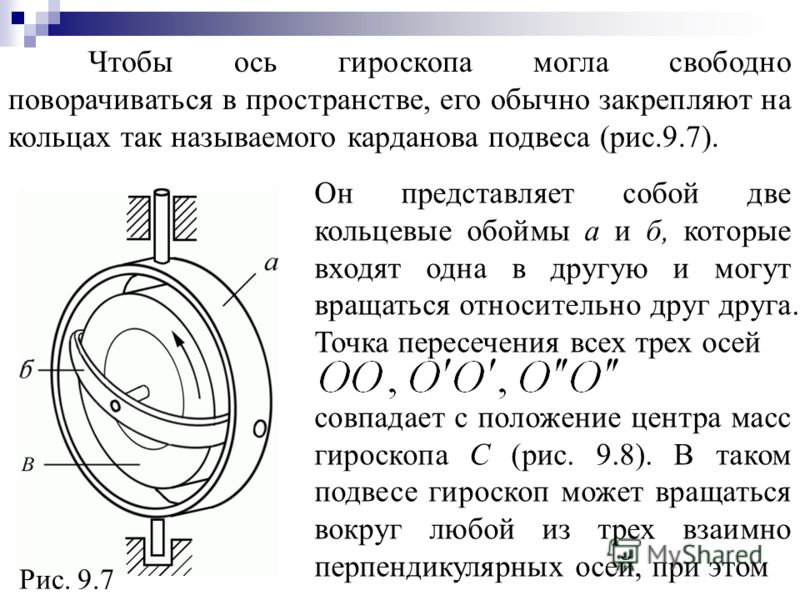
Die Laborversuche von Quanser überzeugen durch ihre schnelle, einfache Inbetriebnahme. Aufbauen und loslegen – Sie sparen Zeit, Kraft und Nerven. Dank der Offenen Architektur und Dokumentation ist eine schnelle Anpassung and individuelle Kursinhalte kein Problem.
Sämtliche Versuchsaufbauten lassen sich umstandslos mit den Peripheriegeräten verbinden. Auch die Steuerung wird Ihnen leicht der Hand gehen: In Ihrer gewohnten Matlab/Simulink-Umgebung steuern und regeln Sie die Aufbauten ganz uncompliziert über Ihren PC. Ermöglicht wird умирает во время Quanser-eigene Echtzeiterweiterungssoftware QuaRC.
Die meisten Laborversuche sind module konzipiert und können daher immer wieder erweitert werden. Umfangreiche Lehrmaterialien helfen Ihnen, die Versuche оптимально в den Lehrplan einzubinden.
Für eine praxisnahe, zukunftsfähige Lehre.Versuchsaufbauten [PDF]
Peripheriegeräte [PDF]
Программное обеспечение QuaRC [PDF]
Persönliche Beratung
Продукт
2 DOF Ball Balancer
Эксперимент на основе зрения для обучения
Балансир для шариков с двумя степенями свободы состоит из пластины, на которую можно поместить шарик и который может свободно двигаться.
 При установке пластины на кардан с двумя степенями свободы пластина может поворачиваться в любом направлении. Верхняя камера используется с системой технического зрения для измерения положения мяча. Эксперимент представляет собой эксперимент по управлению на основе зрения, предназначенный для обучения концепциям управления от среднего до продвинутого уровня. Вы можете использовать его, чтобы продемонстрировать реальные проблемы управления, возникающие в платформах движения на основе машинного зрения, таких как поворотно-наклонные камеры.
При установке пластины на кардан с двумя степенями свободы пластина может поворачиваться в любом направлении. Верхняя камера используется с системой технического зрения для измерения положения мяча. Эксперимент представляет собой эксперимент по управлению на основе зрения, предназначенный для обучения концепциям управления от среднего до продвинутого уровня. Вы можете использовать его, чтобы продемонстрировать реальные проблемы управления, возникающие в платформах движения на основе машинного зрения, таких как поворотно-наклонные камеры.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- Simulink Courseware [PDF]
2 DOF Inverted Pendulum/Gantry
Introduce advanced principles of robotics
The 2 DOF Перевернутый маятник/портал идеально подходит для ознакомления учащихся с более продвинутыми концепциями робототехники. Установка, установленная на роботе с двумя степенями свободы, может быть переконфигурирована для двух экспериментов: перевернутого маятника с двумя степенями свободы и гентри с двумя степенями свободы.
 Студенты изучат концепции аэрокосмической техники, такие как стабилизация ракеты, при разработке контроллера, который поддерживает вертикальное положение маятника с помощью двух серводвигателей. Несколько реальных приложений портальной задачи включают, например, кран, поднимающий и перемещающий тяжелую полезную нагрузку, или портальный робот сборочной линии.
Студенты изучат концепции аэрокосмической техники, такие как стабилизация ракеты, при разработке контроллера, который поддерживает вертикальное положение маятника с помощью двух серводвигателей. Несколько реальных приложений портальной задачи включают, например, кран, поднимающий и перемещающий тяжелую полезную нагрузку, или портальный робот сборочной линии.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
2 DOF Robot
Introduce fundamental principles of robotics
Робот с двумя степенями свободы — это робот типа «пантограф» с двумя степенями свободы. Цель, как правило, состоит в том, чтобы манипулировать положением X-Y концевого зажима с 4 звеньями. Система плоская и имеет 2 приводимых в действие и 3 не приводимых в действие вращательных шарнира. Два серводвигателя, установленные на фиксированном расстоянии, управляют двумя рычагами, соединенными через два двухрычажных рычага без привода.
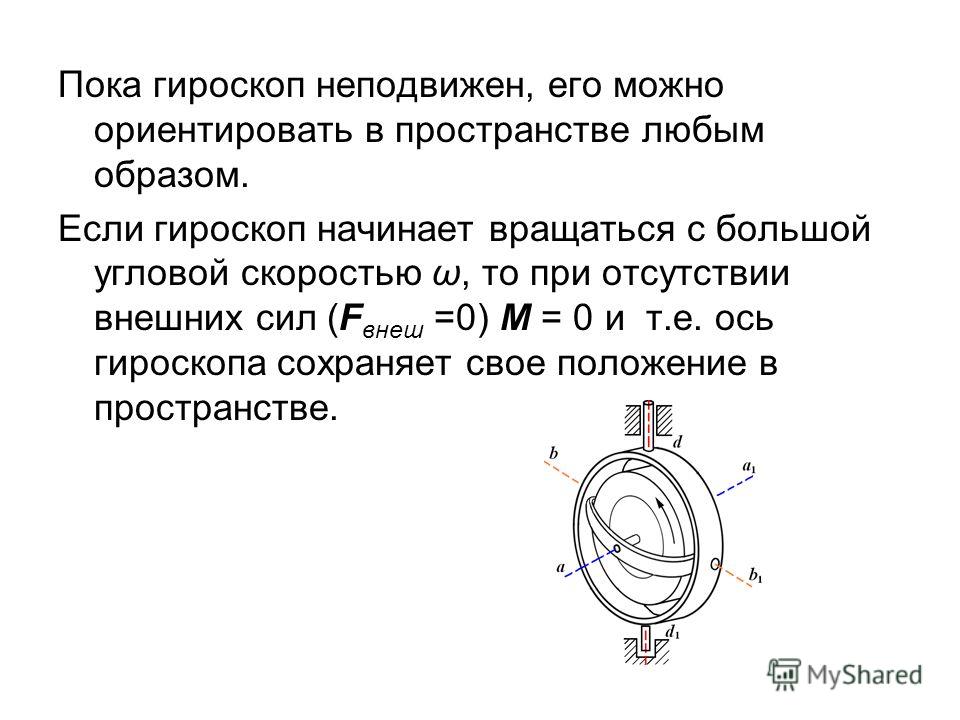 Такая система аналогична кинематическим проблемам, возникающим при управлении более крупными роботами с 6 степенями свободы, включая сингулярности. Эксперимент идеально подходит для ознакомления учащихся с фундаментальными и промежуточными принципами робототехники. Вы можете использовать его для демонстрации реальных задач управления, таких как роботы для захвата и размещения, используемые на производственных линиях.
Такая система аналогична кинематическим проблемам, возникающим при управлении более крупными роботами с 6 степенями свободы, включая сингулярности. Эксперимент идеально подходит для ознакомления учащихся с фундаментальными и промежуточными принципами робототехники. Вы можете использовать его для демонстрации реальных задач управления, таких как роботы для захвата и размещения, используемые на производственных линиях.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
- Customer Story [PDF]
3 DOF Гироскоп
Гироскоп с 3 степенями свободы состоит из диска/ротора, установленного внутри внутреннего синего карданного шарнира, который, в свою очередь, установлен внутри внешнего красного карданного шарнира. Вся эта конструкция поддерживается прямоугольной серебряной рамой. Все эти рамы могут свободно вращаться вокруг своих осей вращения, где размещены токосъемные кольца, обеспечивающие бесконечное непрерывное движение в каждом направлении.
 Эта установка приводит к трем степеням свободы для ротора. Каждая рама может приводиться в движение вокруг своей оси вращения с помощью установленных двигателей. Сам диск также может вращаться вокруг своей оси вращения с помощью отдельного двигателя. Цифровое измерение положения на каждом из этих двигателей составляет
Эта установка приводит к трем степеням свободы для ротора. Каждая рама может приводиться в движение вокруг своей оси вращения с помощью установленных двигателей. Сам диск также может вращаться вокруг своей оси вращения с помощью отдельного двигателя. Цифровое измерение положения на каждом из этих двигателей составляет
выполняется с использованием оптических энкодеров высокого разрешения, в результате чего в этой системе всего 4 мотора и 4 энкодера. Принципы, продемонстрированные гироскопом с тремя степенями свободы, применимы в технологиях, используемых для управления ориентацией в морских, воздушных и космических транспортных средствах. Обширные области применения гироскопа с 3 степенями свободы включают в себя контроль высоты, управление инерционным колесом, навигацию, спутниковую ориентацию и системы автопилота. Кроме того, гироскопические датчики теперь используются в широком спектре технических устройств, таких как смартфоны, планшеты, контроллеры видеоигр и так далее. Ваши ученики могут развивать глубокое понимание теорий управления с помощью реальных приложений.
ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
3 DOF Helicopter
Advanced flight dynamics concepts by расширение управления до трех осей (ход, рыскание и тангаж)
Вертолет с тремя степенями свободы состоит из корпуса модели вертолета, металлического основания и алюминиевой рамы. Вертолет имеет два пропеллера, установленных параллельно каждому и приводимых в действие двигателями постоянного тока - аналогично двухвинтовым вертолетам Tandem. Его можно использовать для понимания и разработки законов управления для транспортного средства, динамика которого характерна для вертолета с жестким корпусом с двумя роторами, или любого устройства с аналогичной динамикой.
ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
- Customer Story [PDF]
3 DOF Hover
Динамика полета и управление аппаратами с вертикальным взлетом
Эксперимент Hover с тремя степенями свободы состоит из плоской круглой рамы с четырьмя пропеллерами.
 Рама установлена на шарнирном соединении с тремя степенями свободы, что позволяет корпусу вращаться вокруг осей крена, тангажа и рыскания. Винты приводятся в движение четырьмя двигателями постоянного тока, установленными в вершинах рамы. Пропеллеры создают подъемную силу, которую можно использовать для непосредственного управления углами тангажа и крена. Общий крутящий момент, создаваемый гребными двигателями, заставляет корпус двигаться вокруг оси рыскания. Два гребных винта вращаются в противоположных направлениях, так что общий крутящий момент в системе уравновешивается, когда тяга четырех
Рама установлена на шарнирном соединении с тремя степенями свободы, что позволяет корпусу вращаться вокруг осей крена, тангажа и рыскания. Винты приводятся в движение четырьмя двигателями постоянного тока, установленными в вершинах рамы. Пропеллеры создают подъемную силу, которую можно использовать для непосредственного управления углами тангажа и крена. Общий крутящий момент, создаваемый гребными двигателями, заставляет корпус двигаться вокруг оси рыскания. Два гребных винта вращаются в противоположных направлениях, так что общий крутящий момент в системе уравновешивается, когда тяга четырех
пропеллеров примерно равны.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Active Mass Damper
Control vibrations in tall structures
Активный массовый демпфер представляет собой настольную модель, имитирующую строение, управляемое активным массовым демпфером.
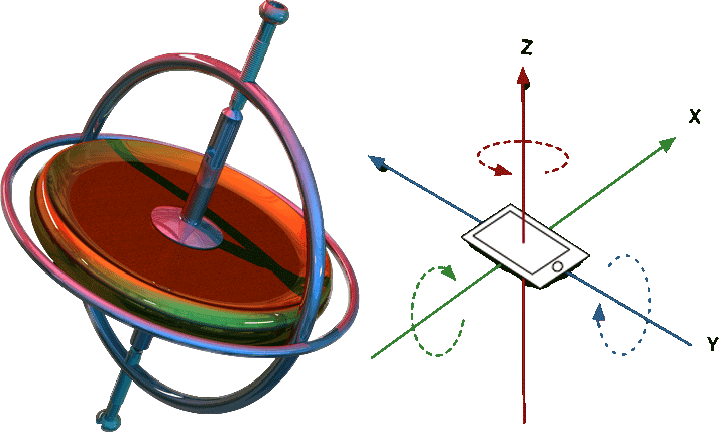 Эксперимент состоит из одно- или двухэтажной конструкции, похожей на здание, поверх которой линейная тележка приводится в движение реечным механизмом. Верхний этаж оснащен акселерометром для измерения ускорения «крыши» относительно земли. Эксперимент может быть использован в исследованиях по смягчению последствий землетрясений и для исследования взаимодействия управления и конструкции. Концептуально он аналогичен активным массовым демпферам, используемым для подавления вибраций в высоких конструкциях (например, высотных зданиях) и для защиты не только от землетрясений, но и, например, от сильных ветров (например, ураганов).
Эксперимент состоит из одно- или двухэтажной конструкции, похожей на здание, поверх которой линейная тележка приводится в движение реечным механизмом. Верхний этаж оснащен акселерометром для измерения ускорения «крыши» относительно земли. Эксперимент может быть использован в исследованиях по смягчению последствий землетрясений и для исследования взаимодействия управления и конструкции. Концептуально он аналогичен активным массовым демпферам, используемым для подавления вибраций в высоких конструкциях (например, высотных зданиях) и для защиты не только от землетрясений, но и, например, от сильных ветров (например, ураганов).Produktinformationpersönliche Beratung
Скачать
Ресурсы- Руководство пользователя. -модель автомобиля, управляемая механизмом Actice Susoension. Эксперимент состоит из трех пластин, установленных друг на друга. Верхний пол напоминает кузов автомобиля и подвешен над средней пластиной двумя пружинами. Высококачественный двигатель постоянного тока с приводом от шпинделя также находится между верхней и средней пластинами, чтобы имитировать активный механизм подвески.
 Верхний этаж оборудован акселерометром для измерения ускорения кузова автомобиля относительно земли завода. Промежуточная пластина контактирует с нижней пластиной, то есть с дорогой, через пружину и представляет собой шину в модели четверти автомобиля. Технология активной подвески используется в автомобильной промышленности для непрерывного управления вертикальным движением колеса транспортного средства с помощью активного -управляемый привод размещен на оси подвеса. Подобные технологии также использовались в тележках поездов для улучшения поведения поезда на поворотах и снижения ускорения, воспринимаемого пассажиром.
Верхний этаж оборудован акселерометром для измерения ускорения кузова автомобиля относительно земли завода. Промежуточная пластина контактирует с нижней пластиной, то есть с дорогой, через пружину и представляет собой шину в модели четверти автомобиля. Технология активной подвески используется в автомобильной промышленности для непрерывного управления вертикальным движением колеса транспортного средства с помощью активного -управляемый привод размещен на оси подвеса. Подобные технологии также использовались в тележках поездов для улучшения поведения поезда на поворотах и снижения ускорения, воспринимаемого пассажиром.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Analog Electronics Labs
Bring Excitement and Relevance to Analog Circuit Design
AELabs выводит учащихся за рамки макетной платы.
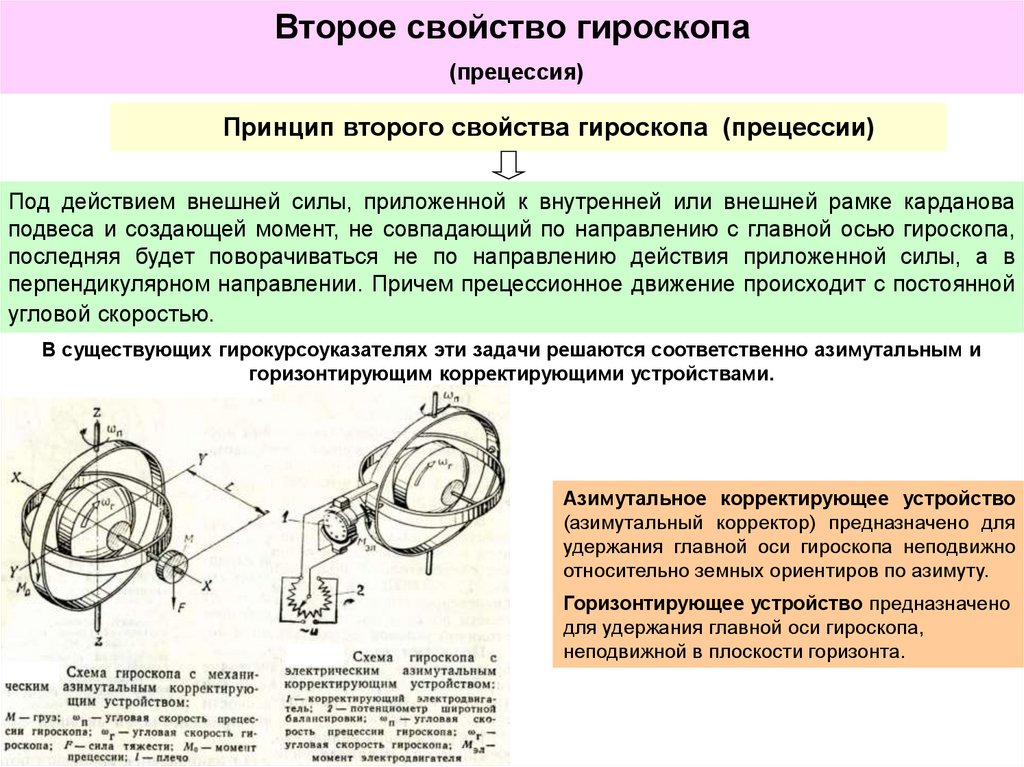 Это дает им практический опыт работы со сложными аналоговыми схемами, которые практически невозможно построить с нуля в лабораторных условиях. Более того, он помещает управление этими цепями в настройки графического интерфейса, позволяя учащимся напрямую взаимодействовать со схемами цепей. Аналоговые схемы, включая полупроводники, усилители и фильтры, остаются центральными элементами работы всех электронных систем. Даже в нашем нынешнем инженерном климате, состоящем преимущественно из цифровых решений, аналоговые схемы по-прежнему актуальны. Компания Quanser совместно с Illustre Technologies создали комплексную лабораторию, в которой обучают основам и важности аналоговой электроники. С помощью AELabs учащиеся могут настраивать, наблюдать и экспериментировать со сложными аналоговыми схемами, такими как усилители на МОП-транзисторах.
Это дает им практический опыт работы со сложными аналоговыми схемами, которые практически невозможно построить с нуля в лабораторных условиях. Более того, он помещает управление этими цепями в настройки графического интерфейса, позволяя учащимся напрямую взаимодействовать со схемами цепей. Аналоговые схемы, включая полупроводники, усилители и фильтры, остаются центральными элементами работы всех электронных систем. Даже в нашем нынешнем инженерном климате, состоящем преимущественно из цифровых решений, аналоговые схемы по-прежнему актуальны. Компания Quanser совместно с Illustre Technologies создали комплексную лабораторию, в которой обучают основам и важности аналоговой электроники. С помощью AELabs учащиеся могут настраивать, наблюдать и экспериментировать со сложными аналоговыми схемами, такими как усилители на МОП-транзисторах.ProduktinformationPersönliche Beratung
- История клиента [PDF]
AMPAQ-L2 Amplifier
Линейный ток. Усилитель идеально подходит для мехатронных систем, требующих оперативного управления током, таких как тактильные или роботизированные платформы, или других сложных конфигураций управления, часто используемых для обучения и исследований.

ProductinformationPersonliche Beratung
- Руководство пользователя [PDF]
Усилитель AMPAQ-L4
Линейный усилитель тока
Усилитель идеально подходит для мехатронных систем, требующих оперативного управления током, таких как тактильные или роботизированные платформы, или других сложных конфигураций управления, часто используемых для обучения и исследований.
ProdukinformationPersonliche Beratung
- Руководство пользователя [PDF]
Усилитель AMPAQ-PWM
Quanser AMPAQ-PWM представляет собой усилитель тока с широтно-импульсной модуляцией (ШИМ), предназначенный для управления мощными системами. Это одноканальный усилитель, то есть он может питать одну нагрузку
. 100523Шар и балка состоят из дорожки, по которой может свободно катиться металлический шар. Трек оснащен линейным датчиком для измерения положения мяча, т. е. выдает сигнал напряжения, пропорциональный положению мяча.
 Одна сторона балки прикреплена к плечу рычага, который может быть соединен с нагрузочным механизмом базового блока поворотного сервопривода. Управляя положением сервопривода, можно отрегулировать угол луча, чтобы сбалансировать мяч в нужном положении. Эксперимент эффективно демонстрирует реальное применение PD-контроля и его связь со стабилизацией мяча на дорожке. Это полезно при обучении основным принципам управления, связанным с реальными задачами, такими как управление креном самолета.
Одна сторона балки прикреплена к плечу рычага, который может быть соединен с нагрузочным механизмом базового блока поворотного сервопривода. Управляя положением сервопривода, можно отрегулировать угол луча, чтобы сбалансировать мяч в нужном положении. Эксперимент эффективно демонстрирует реальное применение PD-контроля и его связь со стабилизацией мяча на дорожке. Это полезно при обучении основным принципам управления, связанным с реальными задачами, такими как управление креном самолета.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Coupled Tanks
Re-configurable process control experiment который позволяет учащимся выполнять широкий спектр лабораторных работ, связанных с моделированием и управлением.
Завод «Соединенные резервуары» представляет собой модуль «Двух резервуаров», состоящий из насоса с резервуаром для воды и двух резервуаров.
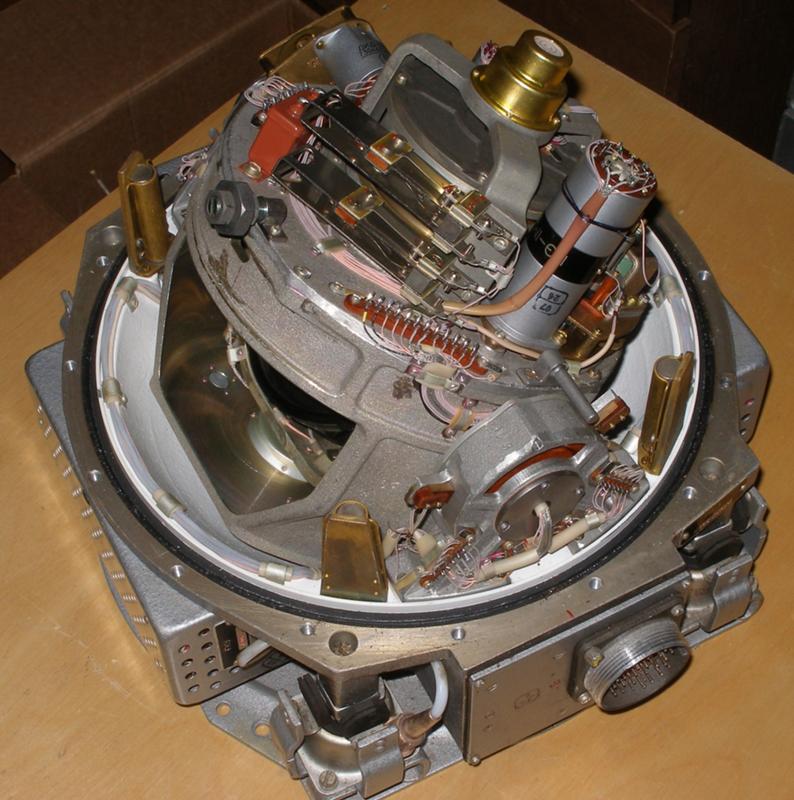 Два бака установлены на передней пластине таким образом, что поток из первого (т.е. верхнего) бака может течь через выходное отверстие, расположенное в нижней части бака, во второй (т.е. нижний) бак. Поток из второго резервуара поступает в основной резервуар для воды. Насос подает воду вертикально к двум быстроразъемным отверстиям «Out1» и «Out2». Две системные переменные напрямую измеряются на буровой установке с сопряженными резервуарами с помощью датчиков давления и доступны для обратной связи. А именно уровни воды в резервуарах 1 и 2. Эксперимент представляет собой реконфигурируемый эксперимент по управлению технологическим процессом, который позволяет учащимся выполнять широкий спектр лабораторных работ, связанных с моделированием и контролем. Контроль уровня жидкости распространен во многих отраслях промышленности, таких как целлюлозно-бумажные комбинаты, нефтехимические заводы и водоочистные сооружения.
Два бака установлены на передней пластине таким образом, что поток из первого (т.е. верхнего) бака может течь через выходное отверстие, расположенное в нижней части бака, во второй (т.е. нижний) бак. Поток из второго резервуара поступает в основной резервуар для воды. Насос подает воду вертикально к двум быстроразъемным отверстиям «Out1» и «Out2». Две системные переменные напрямую измеряются на буровой установке с сопряженными резервуарами с помощью датчиков давления и доступны для обратной связи. А именно уровни воды в резервуарах 1 и 2. Эксперимент представляет собой реконфигурируемый эксперимент по управлению технологическим процессом, который позволяет учащимся выполнять широкий спектр лабораторных работ, связанных с моделированием и контролем. Контроль уровня жидкости распространен во многих отраслях промышленности, таких как целлюлозно-бумажные комбинаты, нефтехимические заводы и водоочистные сооружения.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
- Customer Story [PDF]
Gyro/ Стабильная платформа
Познакомить с концепциями динамики вращения
Гироскопическая/стабильная платформа состоит из вращающегося диска, установленного внутри рамы.
 Он приводится в действие вокруг своего центра с помощью двигателя постоянного тока. Внутренняя рама удерживает вращающийся диск и прикреплена к внешней раме двумя валами на обоих концах. Зубчатый механизм соединен между одним из этих концевых валов, и энкодер измеряет угол синей рамки, когда она вращается вокруг валов. Эксперимент идеально подходит для введения принципов вращательной динамики. Вы можете использовать его для демонстрации реальных задач управления, таких как управление морскими судами, самолетами и подводными лодками или спутниковая навигация.
Он приводится в действие вокруг своего центра с помощью двигателя постоянного тока. Внутренняя рама удерживает вращающийся диск и прикреплена к внешней раме двумя валами на обоих концах. Зубчатый механизм соединен между одним из этих концевых валов, и энкодер измеряет угол синей рамки, когда она вращается вокруг валов. Эксперимент идеально подходит для введения принципов вращательной динамики. Вы можете использовать его для демонстрации реальных задач управления, таких как управление морскими судами, самолетами и подводными лодками или спутниковая навигация.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
HD² High Definition Haptic Device
The HD2 позволяет исследователям взаимодействовать с виртуальной или удаленной средой, используя программируемую силовую обратную связь. По сравнению с другими коммерчески доступными тактильными устройствами HD2 имеет большое рабочее пространство и очень низкую промежуточную динамику.
 Этот параллельный механизм имеет сильное обратное движение с незначительным трением. Мощный привод шпиля и высокопроизводительные двигатели внутри устройства уменьшают воспринимаемую инерцию, сохраняя при этом жесткость конструкции устройства. Потенциал его применения простирается от космических и подводных экспедиций до передовых платформ телеуправления, где важны ловкость и точность. Роботизированная хирургия, тренажеры виртуальной реальности, системы реабилитации человека и игровые системы — вот некоторые другие современные области применения тактильных устройств высокой четкости HD2.
Этот параллельный механизм имеет сильное обратное движение с незначительным трением. Мощный привод шпиля и высокопроизводительные двигатели внутри устройства уменьшают воспринимаемую инерцию, сохраняя при этом жесткость конструкции устройства. Потенциал его применения простирается от космических и подводных экспедиций до передовых платформ телеуправления, где важны ловкость и точность. Роботизированная хирургия, тренажеры виртуальной реальности, системы реабилитации человека и игровые системы — вот некоторые другие современные области применения тактильных устройств высокой четкости HD2.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- Customer Story [PDF]
Hexapod
Six degrees of freedom motion platform for advanced research
The Hexapod is parallel роботизированное устройство, способное перемещать тяжелые грузы (до 100 кг) с большими ускорениями в пределах небольшого рабочего пространства.
 Продуманная механическая конструкция, а также точные и жесткие механически обработанные компоненты делают этого робота отличным инструментом для передовых исследований в таких областях, как виброизоляция, иммерсивное моделирование структурной динамики и реабилитация. В отличие от большинства имеющихся в продаже платформ стюардов, Hexapod приводится в движение превосходными электродвигателями, которые делают эту подвижную платформу с шестью степенями свободы точной, отзывчивой и не требующей особого обслуживания. Используя новую технологию сбора данных Quanser, пользователи могут подключаться к Hexapod через USB-соединение, сохраняя при этом высокую производительность в реальном времени. Многие функции, такие как мощные двигатели постоянного тока со встроенным тормозом, точный шарико-винтовой механизм, оптические энкодеры с высоким разрешением и соединения с низким коэффициентом трения, помогают исследователям выполнять точные манипуляции.
Продуманная механическая конструкция, а также точные и жесткие механически обработанные компоненты делают этого робота отличным инструментом для передовых исследований в таких областях, как виброизоляция, иммерсивное моделирование структурной динамики и реабилитация. В отличие от большинства имеющихся в продаже платформ стюардов, Hexapod приводится в движение превосходными электродвигателями, которые делают эту подвижную платформу с шестью степенями свободы точной, отзывчивой и не требующей особого обслуживания. Используя новую технологию сбора данных Quanser, пользователи могут подключаться к Hexapod через USB-соединение, сохраняя при этом высокую производительность в реальном времени. Многие функции, такие как мощные двигатели постоянного тока со встроенным тормозом, точный шарико-винтовой механизм, оптические энкодеры с высоким разрешением и соединения с низким коэффициентом трения, помогают исследователям выполнять точные манипуляции.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- Simulink Courseware [PDF]
- Customer Story [PDF]
Linear Double Inverted Pendulum
The Double Inverted Маятниковый модуль состоит из двух алюминиевых синих стержней прецизионной обработки; один 7 дюймов в длину, а другой 12 дюймов в длину.
 Модуль легко прикрепляется к переднему маятниковому валу на тележке базового блока линейного сервопривода и может свободно вращаться на 360 градусов. Угол короткого звена определяется с помощью энкодера маятникового вала линейного сервопривода, в то время как звено средней длины измеряется с помощью среднего энкодера, установленного на самом линейном двойном перевернутом маятнике. Разработка контроллера, уравновешивающего два звена, усложняет задачу по сравнению с системой с одним перевернутым маятником. Связанные приложения этого эксперимента включают стабилизацию взлета многоступенчатой ракеты и моделирование системы осанки человека.
Модуль легко прикрепляется к переднему маятниковому валу на тележке базового блока линейного сервопривода и может свободно вращаться на 360 градусов. Угол короткого звена определяется с помощью энкодера маятникового вала линейного сервопривода, в то время как звено средней длины измеряется с помощью среднего энкодера, установленного на самом линейном двойном перевернутом маятнике. Разработка контроллера, уравновешивающего два звена, усложняет задачу по сравнению с системой с одним перевернутым маятником. Связанные приложения этого эксперимента включают стабилизацию взлета многоступенчатой ракеты и моделирование системы осанки человека.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Linear Flexible Inverted Pendulum
The Linear Flexible Модуль перевернутого маятника состоит из жесткого 24-дюймового синего алюминиевого стержня и гибкого звена с концевым грузом, установленным на конце.
 Модуль легко прикрепляется к переднему маятниковому валу на тележке базового блока линейного сервопривода и может свободно вращаться на 360 градусов. Углы маятников считываются с помощью энкодера вала маятника линейного сервопривода. Угол отклонения гибкого звена измеряется аналоговым тензометрическим датчиком. Надежность системы может быть проверена, когда измерение с помощью тензодатчика не используется. Большие легкие конструкции в космосе обладают гибкостью. В результате у них возникают проблемы со стабилизацией, которые связаны с некоторыми проблемами динамического моделирования и управления в эксперименте с линейным перевернутым гибким маятником.
Модуль легко прикрепляется к переднему маятниковому валу на тележке базового блока линейного сервопривода и может свободно вращаться на 360 градусов. Углы маятников считываются с помощью энкодера вала маятника линейного сервопривода. Угол отклонения гибкого звена измеряется аналоговым тензометрическим датчиком. Надежность системы может быть проверена, когда измерение с помощью тензодатчика не используется. Большие легкие конструкции в космосе обладают гибкостью. В результате у них возникают проблемы со стабилизацией, которые связаны с некоторыми проблемами динамического моделирования и управления в эксперименте с линейным перевернутым гибким маятником.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Linear Flexible Joint
Teach the fundamentals of dynamics и управление
Линейная тележка с гибким шарниром состоит из системы двух тележек, скользящих по направляющей.
 Тележка приводит в движение систему, а вторая пассивная тележка соединена с первой посредством линейной пружины. Валы этих элементов крепятся к реечному механизму для передачи движущей силы в систему и для измерения двух положений тележки. Когда двигатель вращается, крутящий момент, создаваемый на выходном валу, преобразуется в линейную силу, которая приводит в движение тележку. Когда тележки движутся, валы энкодера поворачиваются, а результирующие сигналы калибруются для получения положения активированной и загруженной тележки. Эксперимент полезен при изучении анализа вибрации и резонанса. Эта система по своему характеру аналогична проблемам управления, возникающим в эластичных связях и механических трансмиссиях, таких как коробки передач.
Тележка приводит в движение систему, а вторая пассивная тележка соединена с первой посредством линейной пружины. Валы этих элементов крепятся к реечному механизму для передачи движущей силы в систему и для измерения двух положений тележки. Когда двигатель вращается, крутящий момент, создаваемый на выходном валу, преобразуется в линейную силу, которая приводит в движение тележку. Когда тележки движутся, валы энкодера поворачиваются, а результирующие сигналы калибруются для получения положения активированной и загруженной тележки. Эксперимент полезен при изучении анализа вибрации и резонанса. Эта система по своему характеру аналогична проблемам управления, возникающим в эластичных связях и механических трансмиссиях, таких как коробки передач.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Linear Flexible Joint with Inverted Pendulum
A modular лабораторная платформа для обучения робототехнике, мехатронике и элементам управления
Линейный гибкий шарнир с перевернутым маятником состоит из модуля линейного гибкого шарнира с пассивной линейной тележкой, соединенной с базовым блоком линейного сервопривода с помощью линейной пружины и маятника, установленного на выходной тележке.
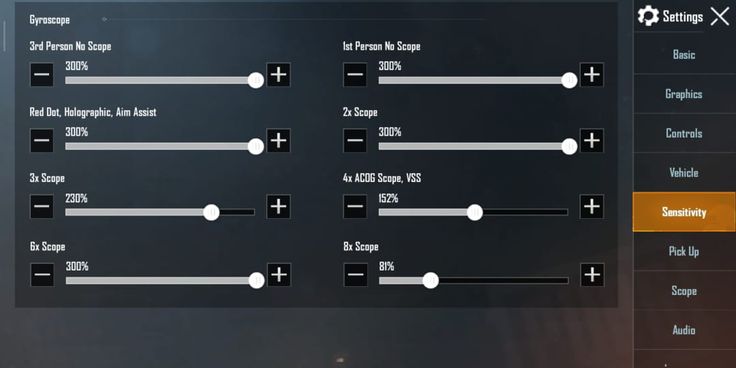 . Линейное гибкое соединение изготовлено из твердого алюминия и использует линейные подшипники для скольжения по шлифованному валу из нержавеющей стали базового блока линейного сервопривода. Положение тележки измеряется с помощью поворотного оптического энкодера, вал которого входит в зацепление с гусеницей через шестерню. Пассивная тележка снабжена поворотным шарниром, ось вращения шарнира перпендикулярна направлению движения тележки. К шарниру можно прикрепить свободно качающуюся штангу, подвешенную перед тележкой. Этот стержень может функционировать как перевернутый маятник, а также как обычный маятник. Угол стержня измеряется с помощью поворотного оптического энкодера. Этот эксперимент является идеальным способом введения промежуточных концепций управления, связанных с анализом вибрации и резонанса, встречающихся, например, в рычажных механизмах и механических трансмиссиях. Эксперимент предлагает учащимся разработать систему управления с обратной связью по состоянию, которая может уравновешивать перевернутый маятник, установленный на тележке с линейным гибким шарниром, при этом сводя к минимуму отклонение пружины.
. Линейное гибкое соединение изготовлено из твердого алюминия и использует линейные подшипники для скольжения по шлифованному валу из нержавеющей стали базового блока линейного сервопривода. Положение тележки измеряется с помощью поворотного оптического энкодера, вал которого входит в зацепление с гусеницей через шестерню. Пассивная тележка снабжена поворотным шарниром, ось вращения шарнира перпендикулярна направлению движения тележки. К шарниру можно прикрепить свободно качающуюся штангу, подвешенную перед тележкой. Этот стержень может функционировать как перевернутый маятник, а также как обычный маятник. Угол стержня измеряется с помощью поворотного оптического энкодера. Этот эксперимент является идеальным способом введения промежуточных концепций управления, связанных с анализом вибрации и резонанса, встречающихся, например, в рычажных механизмах и механических трансмиссиях. Эксперимент предлагает учащимся разработать систему управления с обратной связью по состоянию, которая может уравновешивать перевернутый маятник, установленный на тележке с линейным гибким шарниром, при этом сводя к минимуму отклонение пружины.
ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Linear Servo Base Unit with Inverted Pendulum
A модульная лабораторная платформа для обучения робототехнике, мехатронике и элементам управления
Базовый блок линейного сервопривода поставляется с маятниками, которые можно использовать для проведения различных экспериментов. В комплекте с маятниковой установкой поставляются три эксперимента: козловой кран, перевернутый маятник и самоустанавливающийся перевернутый маятник.
Козловой кран имитирует кран на подвижной платформе, который обычно используется для перевозки предметов на складе или на отгрузочной площадке. В этом случае тележка представляет собой козловую платформу, а маятник выступает в роли крана. Студенты могут узнать, как смягчить движения нисходящего маятника, когда тележка перемещается в разные положения.
Эксперимент «Самоустанавливающийся перевернутый маятник» позволяет учащимся сконструировать контроллер, который раскачивает маятник вверх и удерживает его в вертикальном положении.
Учащиеся могут использовать эксперимент «Линейный перевернутый маятник», чтобы освоить практические навыки решения задач в области машиностроения и аэрокосмической техники. Одно из применений эксперимента с перевернутым маятником можно найти в двухколесном самобалансирующемся автомобиле Segway. [ProductinformationPersönliche Beratung
Загрузить
Ресурсы- Руководство пользователя [PDF]
- Учебное ПО LabVIEW [PDF]
- Sim 033
Магнитная левитация
Классический электромеханический эксперимент для задач нелинейной динамики и управления
Магнитная левитация — это система на основе электромагнита с одной степенью свободы, которая позволяет пользователям левитировать мяч вертикально вверх и вниз. Верхний электромагнит создает силу притяжения к металлическому шарику, который изначально сидит на стойке.
 Положение мяча измеряется с помощью фоточувствительного датчика, встроенного в стойку. Система также включает в себя датчик тока для измерения тока внутри катушки электромагнита. Сложная динамика системы делает ее идеальной для обучения моделированию, линеаризации, текущему управлению, управлению положением и использованию нескольких контуров (т. е. каскадного управления). Технология магнитной левитации используется в таких системах, как поезда на магнитной левитации и электромагнитные краны. Также проводятся исследования по использованию технологии магнитного управления для бесконтактного высокоточного позиционирования пластин в фотолитографии.
Положение мяча измеряется с помощью фоточувствительного датчика, встроенного в стойку. Система также включает в себя датчик тока для измерения тока внутри катушки электромагнита. Сложная динамика системы делает ее идеальной для обучения моделированию, линеаризации, текущему управлению, управлению положением и использованию нескольких контуров (т. е. каскадного управления). Технология магнитной левитации используется в таких системах, как поезда на магнитной левитации и электромагнитные краны. Также проводятся исследования по использованию технологии магнитного управления для бесконтактного высокоточного позиционирования пластин в фотолитографии.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Multi-DOF Torsion
Multi-dimensional system для торсионной динамики
Торсионный модуль представляет собой поворотную торсионную систему, состоящую из блока подшипников с измерительными приборами, установленного в кубической алюминиевой раме.
 Вал может свободно вращаться внутри подшипникового узла, и его угол измеряется с помощью энкодера. Вал может быть оснащен либо скручивающей нагрузкой, либо гибкой муфтой. Добавление одного или нескольких (до семи) модулей кручения последовательно позволяет расширить сложность экспериментов по изучению динамики кручения с двумя или несколькими степенями свободы. Приложения, которые включают в себя гармонические приводы с высоким передаточным числом и легкие трансмиссионные валы, могут иметь гибкость соединения и податливость к скручиванию, и все это можно эмулировать с помощью этой системы. Эксперимент идеально подходит для изучения принципов робототехники и торсионной динамики. Студенты узнают о моделировании торсионной системы и о том, как управлять ею, минимизируя количество вибрации.
Вал может свободно вращаться внутри подшипникового узла, и его угол измеряется с помощью энкодера. Вал может быть оснащен либо скручивающей нагрузкой, либо гибкой муфтой. Добавление одного или нескольких (до семи) модулей кручения последовательно позволяет расширить сложность экспериментов по изучению динамики кручения с двумя или несколькими степенями свободы. Приложения, которые включают в себя гармонические приводы с высоким передаточным числом и легкие трансмиссионные валы, могут иметь гибкость соединения и податливость к скручиванию, и все это можно эмулировать с помощью этой системы. Эксперимент идеально подходит для изучения принципов робототехники и торсионной динамики. Студенты узнают о моделировании торсионной системы и о том, как управлять ею, минимизируя количество вибрации.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Omni Bundle
Cost-effective way to introduce робототехника и тактильные ощущения
Omni Bundle — это робот с шестью вращающимися суставами, три из которых приводятся в действие.
 Три неактивных сустава — это лучезапястные суставы. Три двигателя могут приводить в действие рабочий орган — кончик стилуса — для охвата всей области X, Y, Z в рабочей области. Измерение положения по осям X, Y и Z выполняется с помощью цифровых энкодеров, а измерение вращения вокруг этих осей (крена, тангажа и рыскания) — с помощью потенциометров. Программное обеспечение Phantom Blockset для управления в реальном времени QUARC предоставляет интерфейс для взаимодействия с устройством. Учебный материал, поставляемый с пакетом, знакомит студентов с фундаментальными концепциями робототехники, такими как прямое и обратное кинематическое моделирование, якобиан, ПИД-управление и планирование траектории. Курс также охватывает более продвинутые концепции тактильных ощущений, такие как расчет силы, обнаружение столкновений и динамика виртуальных объектов. Используя тактильные упражнения, представленные в учебном пособии, учащиеся могут быстро создавать базовые виртуальные среды и использовать их в качестве основы для проектирования более сложных многообъектных сред, многоконтактного тактильного взаимодействия, силовой обратной связи, телеопераций и совместных тактильных действий.
Три неактивных сустава — это лучезапястные суставы. Три двигателя могут приводить в действие рабочий орган — кончик стилуса — для охвата всей области X, Y, Z в рабочей области. Измерение положения по осям X, Y и Z выполняется с помощью цифровых энкодеров, а измерение вращения вокруг этих осей (крена, тангажа и рыскания) — с помощью потенциометров. Программное обеспечение Phantom Blockset для управления в реальном времени QUARC предоставляет интерфейс для взаимодействия с устройством. Учебный материал, поставляемый с пакетом, знакомит студентов с фундаментальными концепциями робототехники, такими как прямое и обратное кинематическое моделирование, якобиан, ПИД-управление и планирование траектории. Курс также охватывает более продвинутые концепции тактильных ощущений, такие как расчет силы, обнаружение столкновений и динамика виртуальных объектов. Используя тактильные упражнения, представленные в учебном пособии, учащиеся могут быстро создавать базовые виртуальные среды и использовать их в качестве основы для проектирования более сложных многообъектных сред, многоконтактного тактильного взаимодействия, силовой обратной связи, телеопераций и совместных тактильных действий.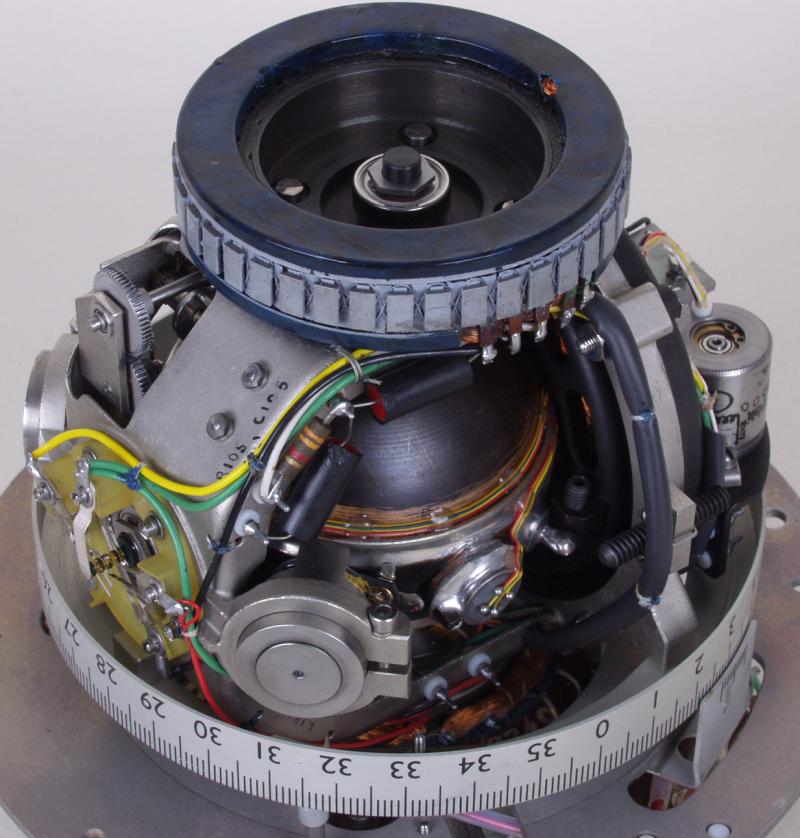
ProdukinformationPersönliche Beratung
- Учебное ПО Simulink [PDF]
Q2-USB Data Acquisition Device
Портативное и надежное устройство для сбора данных в реальном времени Qs-USB обеспечивает измерение и контроль
3
производительность времени через интерфейс USB. Малое время преобразования ввода-вывода, простота подключения и максимальная скорость управления с обратной связью 2 кГц делают Q2-USB идеальным DAQ для быстрого прототипирования и разработки аппаратного обеспечения в цикле (HIL). Благодаря широкому набору входов и выходов вы можете легко подключать и управлять различными устройствами, оснащенными аналоговыми и цифровыми датчиками, включая энкодеры — и все это с одной платы.
ProductinformationPersönliche Beratung
- Руководство пользователя [PDF]
Q8-USB Data Acquisition Device
Портативный и доступный вариант для надежного измерения и контроля данных в реальном времени Q-USB
9 производительность времени через интерфейс USB. Малое время преобразования ввода-вывода, простота подключения и максимальная скорость управления с обратной связью 2 кГц делают Q8-USB идеальным DAQ для быстрого прототипирования и разработки аппаратного обеспечения в цикле (HIL). Благодаря широкому набору входов и выходов вы можете легко подключать и управлять различными устройствами, оснащенными аналоговыми и цифровыми датчиками, включая энкодеры — и все это с одной платы.
Малое время преобразования ввода-вывода, простота подключения и максимальная скорость управления с обратной связью 2 кГц делают Q8-USB идеальным DAQ для быстрого прототипирования и разработки аппаратного обеспечения в цикле (HIL). Благодаря широкому набору входов и выходов вы можете легко подключать и управлять различными устройствами, оснащенными аналоговыми и цифровыми датчиками, включая энкодеры — и все это с одной платы.ProduktinformationPersönliche Beratung
- Руководство пользователя [PDF]
QBOT 2 для QUARC
Высокоэффективные новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские новаторские. Microsoft Kinect и встроенная цель Quanserr. QBot 2 состоит из платформы Yujin Robot Kobuki, RGB-камеры Microsoft Kinect и датчика глубины, а также системы сбора данных Quanserr со встроенным беспроводным компьютером.
 Встроенная компьютерная система, установленная на транспортном средстве, использует компьютер Gumstix DuoVero для запуска QUARC, управляющего программного обеспечения Quanser в реальном времени, и взаимодействует с картой сбора данных QBot 2. Интерфейсом к целевому компьютеру является MATLAB/Simulink с QUARC. QBot 2 доступен через три различных набора блоков: блок Quanser Hardware-In-the-Loop (HIL), предназначенный для чтения с датчиков и/или записи на выходы, набор блоков Quanser Stream API для осуществления связи по проводным и беспроводным каналам связи. , набор блоков Quanser Multimedia для считывания данных изображения RGB и глубины с сенсора Kinect и набор инструментов MathWorks Computer Vision System для обработки изображений. Контроллеры разрабатываются в Simulink с помощью QUARC на главном компьютере, и эти модели кросс-компилируются и беспрепятственно загружаются в цель.
Встроенная компьютерная система, установленная на транспортном средстве, использует компьютер Gumstix DuoVero для запуска QUARC, управляющего программного обеспечения Quanser в реальном времени, и взаимодействует с картой сбора данных QBot 2. Интерфейсом к целевому компьютеру является MATLAB/Simulink с QUARC. QBot 2 доступен через три различных набора блоков: блок Quanser Hardware-In-the-Loop (HIL), предназначенный для чтения с датчиков и/или записи на выходы, набор блоков Quanser Stream API для осуществления связи по проводным и беспроводным каналам связи. , набор блоков Quanser Multimedia для считывания данных изображения RGB и глубины с сенсора Kinect и набор инструментов MathWorks Computer Vision System для обработки изображений. Контроллеры разрабатываются в Simulink с помощью QUARC на главном компьютере, и эти модели кросс-компилируются и беспрепятственно загружаются в цель.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- Simulink Courseware [PDF]
QPIDe Data Acquisition Device
Precise, reliable data acquisition for complex controls configurations
QPIDe основан на технологии PCI Express для приложений сбора данных, которым требуется полоса пропускания для обеспечения достаточно быстрой передачи данных в память.
 Благодаря сверхмалому времени преобразования ввода-вывода и одновременной выборке каждого типа ввода-вывода QPIDe подходит для сложных конфигураций управления для исследовательских и обучающих концепций управления. Например, для обучения управлению или проведения исследований в таких областях, как аэрокосмическая промышленность или тактильные ощущения.
Благодаря сверхмалому времени преобразования ввода-вывода и одновременной выборке каждого типа ввода-вывода QPIDe подходит для сложных конфигураций управления для исследовательских и обучающих концепций управления. Например, для обучения управлению или проведения исследований в таких областях, как аэрокосмическая промышленность или тактильные ощущения.ProductinformationPersönliche Beratung
- Руководство пользователя [PDF]
Quanser AERO
Гибкая платформа для мехатроники и управления
В сочетании с легким дизайном эксперимента это делает систему способной к очень чувствительным движениям. Компактная база AERO включает в себя встроенный усилитель со встроенным датчиком тока, встроенное устройство сбора данных и сменную интерфейсную панель QFLEX 2. Эксперимент реконфигурируется для различных аэрокосмических систем, от управления ориентацией с 1 степенями свободы и вертолета с двумя степенями свободы до полуквадротора. Интегрируя разработанную Quanser технологию вычислительного интерфейса QFLEX 2, Quanser AERO также обеспечивает гибкость лабораторных конфигураций с использованием ПК или микроконтроллеров, таких как NI myRIO, Arduino и Raspberry Pi.

ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- Simulink Courseware [PDF]
Quanser Rapid Control Prototyping Toolbox for LabVIEW
Faster control design and simpler connectivity for LabVIEW
Надстройка Quanser RCP для графической среды разработки NI LabVIEW — это мощный инструмент проектирования систем управления, который охватывает весь спектр проектирования, от моделирования до реализации системы управления. Это значительно упрощает доступ к экспериментам по управлению Quanser, заботясь обо всех стандартных низкоуровневых конфигурациях программного и аппаратного обеспечения. Полученные в результате ВП понятны и соответствуют стандартным системным блок-схемам, помогая преодолеть разрыв между теорией и практическими реализациями.
ProductinformationPersönliche Beratung
Программное обеспечение для управления в реальном времени QUARC®
Ускорение проектирования систем управления
Программное обеспечение Quanser QUARC добавляет в Simulink мощные инструменты и возможности развертывания, упрощающие разработку сложных мехатроники и приложений управления в реальном времени.
 QUARC генерирует код в реальном времени непосредственно из контроллеров, разработанных Simulink, и запускает его в реальном времени на целевой платформе Windows — и все это без цифровой обработки сигналов или написания единой строки кода.
QUARC генерирует код в реальном времени непосредственно из контроллеров, разработанных Simulink, и запускает его в реальном времени на целевой платформе Windows — и все это без цифровой обработки сигналов или написания единой строки кода.ProdukinformationPersönliche Beratung
QUBE Servo 2
Недорогая обучающая платформа для мехатроники и управления
QUBE-Servo 2 представляет собой компактную поворотную сервосистему, которую можно использовать для выполнения различных классических маятниковых и инвертированных сервоуправлений. эксперименты. QUBE-Servo 2 можно настроить с интерфейсными модулями QFLEX 2 USB или QFLEX 2 Embedded. QFLEX 2 USB позволяет управлять компьютером через USB-соединение. QFLEX 2 Embedded позволяет управлять устройством с микроконтроллером, таким как Arduino, через 4-проводной интерфейс SPI. Система приводится в действие с помощью коллекторного двигателя постоянного тока на 18 В с прямым приводом. Двигатель питается от встроенного ШИМ-усилителя со встроенным датчиком тока.
 В комплекте с системой поставляются два дополнительных модуля: инерционный диск и вращающийся маятник. Модули можно легко присоединить или заменить с помощью магнитов, установленных на разъеме модуля QUBEServo 2. Односторонние поворотные энкодеры используются для измерения углового положения двигателя постоянного тока и маятника, а угловая скорость двигателя также может быть измерена с помощью встроенного программного обеспечения 9.1016 тахометр.
В комплекте с системой поставляются два дополнительных модуля: инерционный диск и вращающийся маятник. Модули можно легко присоединить или заменить с помощью магнитов, установленных на разъеме модуля QUBEServo 2. Односторонние поворотные энкодеры используются для измерения углового положения двигателя постоянного тока и маятника, а угловая скорость двигателя также может быть измерена с помощью встроенного программного обеспечения 9.1016 тахометр.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Rotary Double Inverted Pendulum
Take the cassic inverted вызов маятника на новый уровень
Вращающийся двойной перевернутый маятник состоит из поворотного рычага, который крепится к базовому блоку поворотного сервопривода, короткого 7-дюймового нижнего синего стержня, шарнира энкодера и верхнего 12-дюймового синего стержня.
 Регулятор баланса вычисляет напряжение на основе угловых измерений энкодеров. Этот сигнал управляющего напряжения усиливается и подается на серводвигатель. Вращающийся рычаг перемещается соответственно, чтобы сбалансировать два звена, и процесс повторяется. Эксперимент идеально подходит для ознакомления с промежуточными и продвинутыми концепциями управления, поднимая классическую задачу с одним перевернутым маятником на новый уровень сложности. Вы можете использовать его для демонстрации реальных задач управления, связанных, например, со стабилизацией взлета многоступенчатой ракеты.
Регулятор баланса вычисляет напряжение на основе угловых измерений энкодеров. Этот сигнал управляющего напряжения усиливается и подается на серводвигатель. Вращающийся рычаг перемещается соответственно, чтобы сбалансировать два звена, и процесс повторяется. Эксперимент идеально подходит для ознакомления с промежуточными и продвинутыми концепциями управления, поднимая классическую задачу с одним перевернутым маятником на новый уровень сложности. Вы можете использовать его для демонстрации реальных задач управления, связанных, например, со стабилизацией взлета многоступенчатой ракеты.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Rotary Flexible Joint
Modeling flexible joints in a роботизированные руки
Поворотный гибкий шарнир состоит из свободной руки, прикрепленной к двум одинаковым пружинам.
 Пружины смонтированы на алюминиевом шасси, которое крепится к нагрузочному механизму базового блока поворотного сервопривода. Модуль присоединяется к двигателю постоянного тока на базовом блоке сервопривода, который вращает балку, закрепленную на гибком шарнире. Эксперимент идеально подходит для моделирования гибкого соединения робота. Он также полезен при изучении анализа вибрации и резонанса. Ротационное гибкое соединение использует датчик для измерения отклонения соединения, чтобы решить проблемы управления, возникающие в больших зубчатых соединениях роботов, где гибкость проявляется в коробке передач. Студенты узнают, как моделировать систему, используя пространство состояний, и проектировать контроллер обратной связи с размещением полюсов.
Пружины смонтированы на алюминиевом шасси, которое крепится к нагрузочному механизму базового блока поворотного сервопривода. Модуль присоединяется к двигателю постоянного тока на базовом блоке сервопривода, который вращает балку, закрепленную на гибком шарнире. Эксперимент идеально подходит для моделирования гибкого соединения робота. Он также полезен при изучении анализа вибрации и резонанса. Ротационное гибкое соединение использует датчик для измерения отклонения соединения, чтобы решить проблемы управления, возникающие в больших зубчатых соединениях роботов, где гибкость проявляется в коробке передач. Студенты узнают, как моделировать систему, используя пространство состояний, и проектировать контроллер обратной связи с размещением полюсов.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Rotary Flexible Link
Control and vibration analysis of гибкие звенья
Поворотное гибкое звено состоит из тензорезистора, который удерживается на зажатом конце тонкого гибкого звена из нержавеющей стали.
 Двигатель постоянного тока на поворотном базовом блоке сервопривода используется для вращения гибкого звена с одного конца в горизонтальной плоскости. Моторный конец звена оснащен тензодатчиком, который может определять отклонение наконечника. Тензодатчик выдает аналоговый сигнал, пропорциональный прогибу звена. В этом эксперименте студенты учатся находить жесткость экспериментально и использовать Лагранжа для разработки модели системы. Затем это используется для разработки управления с обратной связью с использованием линейно-квадратичного регулятора, где кончик луча отслеживает желаемую команду, сводя к минимуму отклонение звена. Этот эксперимент идеально подходит для изучения анализа вибрации и резонанса и позволяет имитировать реальные проблемы управления, возникающие в больших и легких конструкциях, обладающих гибкостью и требующих управления с обратной связью для повышения производительности. Эксперимент также полезен при моделировании гибкой связи на роботе или космическом корабле.
Двигатель постоянного тока на поворотном базовом блоке сервопривода используется для вращения гибкого звена с одного конца в горизонтальной плоскости. Моторный конец звена оснащен тензодатчиком, который может определять отклонение наконечника. Тензодатчик выдает аналоговый сигнал, пропорциональный прогибу звена. В этом эксперименте студенты учатся находить жесткость экспериментально и использовать Лагранжа для разработки модели системы. Затем это используется для разработки управления с обратной связью с использованием линейно-квадратичного регулятора, где кончик луча отслеживает желаемую команду, сводя к минимуму отклонение звена. Этот эксперимент идеально подходит для изучения анализа вибрации и резонанса и позволяет имитировать реальные проблемы управления, возникающие в больших и легких конструкциях, обладающих гибкостью и требующих управления с обратной связью для повышения производительности. Эксперимент также полезен при моделировании гибкой связи на роботе или космическом корабле.
ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Rotary Inverted Pendulum
Introduce intermediate control concepts and теории, имеющие отношение к проблемам, с которыми инженеры сталкиваются в реальной жизни.
Вращающийся перевернутый маятник состоит из плоского рычага с шарниром на одном конце и металлическим стержнем на другом конце. Шарнирный конец установлен на верхней части вала нагрузочной шестерни базового блока поворотного сервопривода. Звено маятника крепится к металлическому валу, а вал оснащен энкодером с высоким разрешением для измерения его угла. В результате получается горизонтально вращающийся рычаг с маятником на конце. Этот эксперимент идеально подходит для изучения практических навыков решения задач в области машиностроения и аэрокосмической техники при разработке контроллеров, которые уравновешивают вертикальный стержень в вертикальном положении за счет вращения или изменения угла в основании, а также качают маятник вверх и удерживают его в вертикальном положении.
 . Классическим применением является двухколесный самобалансирующийся электромобиль Segway.
. Классическим применением является двухколесный самобалансирующийся электромобиль Segway.ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Rotary Servo Base Unit
Convenient turn-key модульная лаборатория управления поворотным устройством
Основание поворотного сервопривода состоит из двигателя постоянного тока, заключенного в прочную алюминиевую раму и оснащенного планетарным редуктором. Двигатель имеет собственный внутренний редуктор, который приводит в движение внешние шестерни. Он оснащен тремя датчиками: потенциометром, энкодером и тахометром. Датчики потенциометра и энкодера измеряют угловое положение нагрузочного механизма, а тахометр можно использовать для измерения его скорости. Реальные применения поворотного серводвигателя включают функцию автофокусировки в современных камерах, круиз-контроль в автомобилях и контроль скорости в проигрывателях компакт-дисков.

ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Seesaw
The Seesaw module consists of two длинные руки шарнирно закреплены на опорной точке опоры. Система состоит из точно обработанного поликарбоната с прочным матовым покрытием. Качели могут свободно вращаться вокруг оси в центре, и цель состоит в том, чтобы расположить тележку так, чтобы сбалансировать систему. Два модуля Seesaw можно соединить вместе с помощью прилагаемой насадки Seesaw с маятником для реализации эксперимента с несколькими входами и несколькими выходами. Эксперимент включает динамику и управление, аналогичные эксперименту с перевернутым маятником. Одним из реальных применений этой системы является управление самолетом по крену.
ProduktinformationPersönliche Beratung
Download
Resources- User Manual [PDF]
- LabVIEW Courseware [PDF]
- Simulink Courseware [PDF]
Shake Table I-40
Linear shaker
Система Shake Table I-40 представляет собой одноосное сейсмическое устройство, которое можно использовать для обучения динамике и управлению конструкциями, инженерии землетрясений и другим темам, связанным с гражданским строительством.
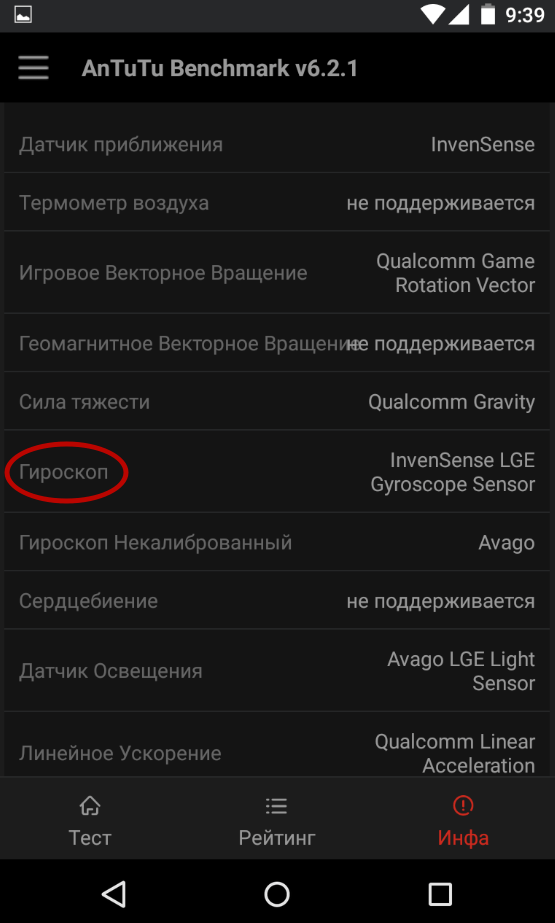 Встряхивающий стол I-40 — это портативный, но мощный встряхивающий стол, которым можно легко управлять через среду графического интерфейса пользователя. Предоставленное программное обеспечение устраняет необходимость ручного кодирования и позволяет отслеживать и анализировать ответ. Эта недорогая платформа упрощает настройку для быстрого и легкого взаимодействия с компьютером. Эту систему можно использовать для имитации землетрясений и оценки эффективности демпферов активной массы, например, с помощью демпфера активной массы Quanser One-Floor Active Mass Damper. Как типичное приложение, Shake Table I может возбуждать гибкие режимы высокой конструкции, чтобы спроектировать, внедрить и оценить систему управления для управления и демпфирования структурных вибраций. С предварительно загруженными профилями ускорения реальных землетрясений, таких как Нортридж и Эль-Сентро, учащиеся могут изучать их воздействие на здания, мосты и различные материалы.
Встряхивающий стол I-40 — это портативный, но мощный встряхивающий стол, которым можно легко управлять через среду графического интерфейса пользователя. Предоставленное программное обеспечение устраняет необходимость ручного кодирования и позволяет отслеживать и анализировать ответ. Эта недорогая платформа упрощает настройку для быстрого и легкого взаимодействия с компьютером. Эту систему можно использовать для имитации землетрясений и оценки эффективности демпферов активной массы, например, с помощью демпфера активной массы Quanser One-Floor Active Mass Damper. Как типичное приложение, Shake Table I может возбуждать гибкие режимы высокой конструкции, чтобы спроектировать, внедрить и оценить систему управления для управления и демпфирования структурных вибраций. С предварительно загруженными профилями ускорения реальных землетрясений, таких как Нортридж и Эль-Сентро, учащиеся могут изучать их воздействие на здания, мосты и различные материалы.ProductinformationPersönliche Beratung
- Руководство пользователя [PDF]
Таблица встряхивания II обучение динамике конструкций, виброизоляции, управлению с обратной связью и другим контрольным темам, связанным с землетрясением, аэрокосмической техникой и машиностроением.
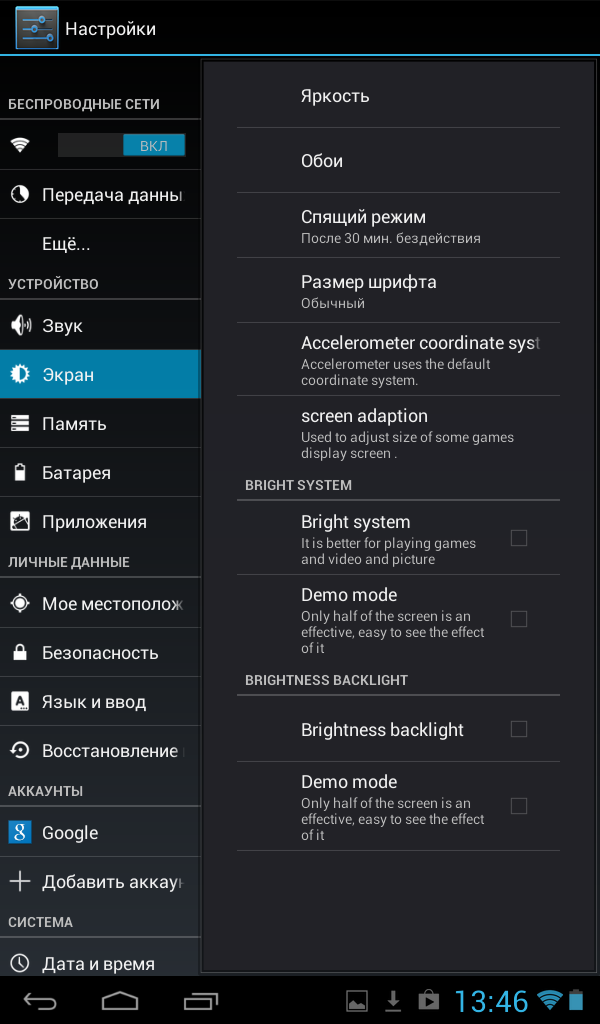 Вибростол рассчитан на нагрузку 7,5 кг при 2,5 г. Сцена движется на двух закаленных металлических валах с линейными подшипниками, что обеспечивает плавное линейное движение с малым отклонением траектории. Пользователи могут создавать синусоидальные, чиповые, а также предварительно загруженные профили ускорения реальных землетрясений, таких как Нортридж, Кобе и Эль-Сентро, для изучения их воздействия на здания, мосты и различные материалы. Кроме того, профили землетрясений можно загрузить из базы данных PEER Ground Motion, масштабировать с помощью прилагаемого программного обеспечения и воспроизвести в таблице сотрясений II.
Вибростол рассчитан на нагрузку 7,5 кг при 2,5 г. Сцена движется на двух закаленных металлических валах с линейными подшипниками, что обеспечивает плавное линейное движение с малым отклонением траектории. Пользователи могут создавать синусоидальные, чиповые, а также предварительно загруженные профили ускорения реальных землетрясений, таких как Нортридж, Кобе и Эль-Сентро, для изучения их воздействия на здания, мосты и различные материалы. Кроме того, профили землетрясений можно загрузить из базы данных PEER Ground Motion, масштабировать с помощью прилагаемого программного обеспечения и воспроизвести в таблице сотрясений II.Produktinformationpersönliche Beratung
Скачать
Ресурсы- Руководство пользователя
292929292929292
SHALE SHALE 9002 9003 9003
60 SHAKE SHAKE III III 9002. 9003
606060. представляет собой двухосный мощный планарный симулятор землетрясений, идеально подходящий для расширенного динамического анализа и исследований, связанных с уменьшением потерь от землетрясений.
 Он способен перемещать большие грузы до 100 кг с большими ускорениями и скоростями. Он приводится в действие с помощью технологии линейного двигателя, что устраняет необходимость в гидравлике. Он имеет три линейных двигателя, два из которых работают параллельно для приведения в действие оси x, а один двигатель используется для приведения в действие оси y.
Он способен перемещать большие грузы до 100 кг с большими ускорениями и скоростями. Он приводится в действие с помощью технологии линейного двигателя, что устраняет необходимость в гидравлике. Он имеет три линейных двигателя, два из которых работают параллельно для приведения в действие оси x, а один двигатель используется для приведения в действие оси y.ProduktinformationPersönliche Beratung
- Руководство пользователя [PDF]
Voltpaq-X1 Amplifier
Voltpaq Amplifier одноканальный линейный усилитель мощности на основе напряжения. Линейка VoltPAQ предназначена для ускорения ваших экспериментов. Меньший, более легкий и портативный VoltPAQ идеально подходит для всех сложных конфигураций управления, связанных с образовательными или исследовательскими потребностями. Эти линейные усилители мощности, управляемые напряжением, предназначены для достижения высокой производительности при использовании аппаратных средств в контуре.
ProductinformationPersönliche Beratung
- Руководство пользователя [PDF]
Усилитель VoltPAQ-X2
VoltPAQ-X2 представляет собой двухканальный линейный усилитель мощности на основе напряжения.
 Линейка VoltPAQ предназначена для ускорения ваших экспериментов. Меньший, более легкий и портативный VoltPAQ идеально подходит для всех сложных конфигураций управления, связанных с образовательными или исследовательскими потребностями. Эти линейные усилители мощности, управляемые напряжением, предназначены для достижения высокой производительности при использовании аппаратных средств в контуре.
Линейка VoltPAQ предназначена для ускорения ваших экспериментов. Меньший, более легкий и портативный VoltPAQ идеально подходит для всех сложных конфигураций управления, связанных с образовательными или исследовательскими потребностями. Эти линейные усилители мощности, управляемые напряжением, предназначены для достижения высокой производительности при использовании аппаратных средств в контуре.ProductinformationPersönliche Beratung
- Руководство пользователя [PDF]
Усилитель VoltPAQ-X4
VoltPAQ-X4 представляет собой линейный усилитель мощности с четырьмя каналами. Линейка VoltPAQ предназначена для ускорения ваших экспериментов. Меньший, более легкий и портативный VoltPAQ идеально подходит для всех сложных конфигураций управления, связанных с образовательными или исследовательскими потребностями. Эти линейные усилители мощности, управляемые напряжением, предназначены для достижения высокой производительности при использовании аппаратных средств в контуре.

ProduktinformationPersönliche Beratung
- User Manual [PDF]
Autonomous Vehicles Research Studio
Jump-start Your Autonomous Vehicles Research
Quanser's new Autonomous Vehicles Research Studio is the ideal solution for academics looking to build a multi -Программа исследования транспортных средств в короткие сроки. Студия исследования автономных транспортных средств, состоящая из квадрокоптеров QDrone и наземных транспортных средств QBot 2, наземной станции управления, оборудования для наблюдения и обеспечения безопасности, является единственным вариантом для исследовательских групп, стремящихся запустить исследовательские программы в области автономной робототехники и добиться высокой производительности за очень короткий промежуток времени.
ProductinformationPersönliche Beratung
QCar
Беспилотный автомобиль с множеством датчиков
QCar, экспериментальный автомобиль Исследовательской студии беспилотных автомобилей, представляет собой масштабную модель автомобиля с открытой архитектурой, предназначенную для научных исследований.
 Работая индивидуально или в парке, QCar является идеальным средством для проверки создания наборов данных, картографирования, навигации, машинного обучения, искусственного интеллекта и других передовых концепций автономного вождения.
Работая индивидуально или в парке, QCar является идеальным средством для проверки создания наборов данных, картографирования, навигации, машинного обучения, искусственного интеллекта и других передовых концепций автономного вождения.
QCar оснащен суперкомпьютером NVIDIA® Jetson™ TX2 и оснащен широким спектром датчиков, включая LIDAR, 360-градусный обзор, датчик глубины, IMU, энкодеры, а также расширяемый пользователем ввод-вывод. Используйте его, чтобы начать исследования и масштабировать существующий парк транспортных средств, одновременно используя несколько программных сред, включая Simulink®, Python™, C/C++, TensorFlow и ROS.ProdukinformationPersönliche Beratung
QLabs Virtual Ball and Beam
Виртуальная платформа для дистанционных и смешанных курсов по системам управления для студентов
QLabs Virtual Ball and Beam — это полностью оснащенный инструментами динамически точный цифровой двойник системы Quanser Ball and Beam. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки.
 С QLabs Virtual Ball and Beam вы можете обогатить свои лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в свой дистанционный и онлайн-курс по системам управления.
С QLabs Virtual Ball and Beam вы можете обогатить свои лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в свой дистанционный и онлайн-курс по системам управления.QLabs Virtual Ball and Beam доступен по подписке на несколько рабочих мест сроком на 12 месяцев. Платформа совместима с физической программой Ball and Beam, которая охватывает различные темы моделирования и управления.
ProdukinformationPersönliche Beratung
QLabs Virtual QUBE-Servo 2
Виртуальная платформа для дистанционных и смешанных курсов по системам управления бакалавриата
QLabs Virtual QUBE-Servo 2 — это полностью оснащенный, динамически точный виртуальный двойник классического QUBE-Servo 2 система. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. QLabs Virtual QUBE-Servo 2 может обогатить ваши лекции и занятия в традиционных лабораториях или привнести достоверный, аутентичный лабораторный опыт на основе моделей в ваш дистанционный и онлайн-курс по системам управления.

QLabs Virtual QUBE-Servo 2 доступен по подписке на несколько рабочих мест. Платформа совместима с физической учебной программой QUBE-Servo 2, которая охватывает более 30 концепций, включая моделирование, идентификацию параметров, управление положением и скоростью, управление упреждением, анализ устойчивости, установившуюся ошибку, момент инерции, моделирование маятника, управление краном, и контроль баланса маятника.
ProductinformationPersonliche Beratung
QLabs Virtual Rotary Flexible Link
Виртуальная платформа для дистанционных и смешанных курсов по системам управления бакалавриата
QLabs Virtual Rotary Flexible Link — это полностью оснащенный инструментами динамически точный цифровой двойник системы Quanser Rotary Flexible Link. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. С помощью QLabs Virtual Rotary Flexible Link вы можете обогатить свои лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в свой дистанционный и онлайн-курс по системам управления.

Гибкая ссылка QLabs Virtual Rotary доступна по подписке на несколько рабочих мест. Платформа совместима с физической учебной программой Rotary Flexible Link, которая охватывает различные темы моделирования и управления.
ProdukinformationPersönliche Beratung
Виртуальные сопряженные резервуары QLabs
Виртуальная платформа для дистанционных и смешанных курсов управления технологическими процессами для студентов
Виртуальные сопряженные резервуары QLabs — это полностью оснащенный инструментами динамически точный цифровой двойник системы сопряженных резервуаров Quanser. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. С помощью сопряженных резервуаров QLabs вы можете обогатить свои лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в свой дистанционный и онлайн-курс по управлению технологическими процессами.
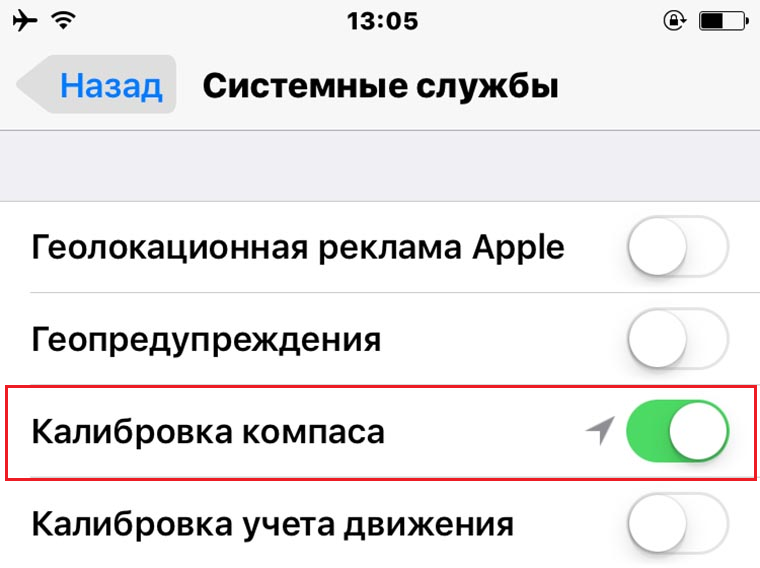
Виртуальные сопряженные резервуары QLabs доступны по подписке на несколько рабочих мест. Платформа совместима с учебным планом «Физические сопряженные резервуары», который охватывает различные темы моделирования и управления.
ProductinformationPersönliche Beratung
QLabs Virtual Rotary Servo
Виртуальная платформа для дистанционных и смешанных курсов по системам управления бакалавриата
QLabs Virtual Rotary Servo — это полностью оснащенный инструментами, динамически точный цифровой двойник классической системы Rotary Servo Base Unit. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. С помощью QLabs Virtual Rotary Servo вы можете обогатить свои лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в свой дистанционный и онлайн-курс по системам управления.
QLabs Virtual Rotary Servo доступен по подписке на несколько рабочих мест.
 Платформа совместима с учебным планом физического базового блока поворотного сервопривода, который охватывает темы моделирования, управления положением и скоростью.
Платформа совместима с учебным планом физического базового блока поворотного сервопривода, который охватывает темы моделирования, управления положением и скоростью.ProdukinformationPersönliche Beratung
QLabs Virtual Quanser AERO
Виртуальная платформа для дистанционных и смешанных курсов бакалавриата по аэрокосмической технике и управлению
QLabs Virtual Quanser AERO — это полностью оснащенный инструментами, динамически точный виртуальный близнец системы Quanser AERO. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. QLabs Virtual Quanser AERO может обогатить ваши лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в дистанционный и смешанный курс по аэрокосмическим системам и системам управления.
QLabs Virtual Quanser AERO доступен по подписке на несколько рабочих мест. Платформа совместима с физической учебной программой Quanser AERO, которая охватывает такие понятия, как моделирование, идентификация системы, управление ориентацией и скоростью, ПИД-управление, планирование усиления, управление с обратной связью по состоянию, связанная динамика и фильтр Калмана.
ProdukinformationPersönliche Beratung
QLabs Virtual QBot 2e
Виртуальная платформа для дистанционных и смешанных курсов по робототехнике для студентов и продвинутых курсов
QLabs Virtual QBot 2e — это полностью оборудованный, динамически точный виртуальный близнец классической системы Quanser QBot 2e. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. QLabs Virtual QBot 2e может обогатить ваши лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в ваш дистанционный и онлайн-курс по робототехнике.
QLabs Virtual QBot 2e доступен по подписке на несколько рабочих мест. Платформа совместима с физическим учебным планом QBot 2e, который охватывает такие понятия, как дифференциальный привод, прямая и обратная кинематика, счисление пути, одометрическая локализация, планирование пути, предотвращение препятствий, получение изображений, обработка и рассуждение, локализация и картографирование, а также зрение.
управляемое управление транспортным средством.ProdukinformationPersönliche Beratung
QLabs Virtual QArm
Виртуальная платформа для дистанционных и смешанных курсов робототехники для студентов
QLabs Virtual QArm — это полностью оснащенный инструментами, динамически точный виртуальный двойник системы Quanser QArm. Он ведет себя так же, как физическое оборудование, и его можно измерять и контролировать с помощью MATLAB®/Simulink® и других сред разработки. QLabs Virtual QArm может обогатить ваши лекции и занятия в традиционных лабораториях или привнести достоверные, аутентичные лабораторные опыты на основе моделей в ваш дистанционный и онлайн-курс по робототехнике.
QLabs Virtual QArm доступен по подписке на несколько рабочих мест. Платформа совместима с физической учебной программой QArm, которая охватывает такие понятия, как совместное управление, кинематика, планирование пути, статика и динамика.
ProdukinformationPersönliche Beratung
QArm
Современный манипулятор для курсов и исследований в области робототехники
QArm от Quanser — это серийный робот-манипулятор с 4 степенями свободы, современным двухступенчатым захватом на основе сухожилий и камерой RGBD для обучения инженеров.