
Как это работает. Гироскоп
Механизм, изобретенный в начале XIX века, сегодня находит применение практически повсеместно. Гироскопы используются в системах навигации кораблей и самолетов, в мобильных устройствах, игровых приставках и квадрокоптерах. Рассказываем об удивительном гироскопе – его истории, устройстве и принципе действия.
От детского волчка до полетов в космос
В основе многих научных открытий лежит наблюдение за простыми повседневными вещами. Так и один из важных приборов, применяющихся в составе современных устройств, – гироскоп – родился из старинной детской игрушки, известной как волчок. Сильно раскрученный волчок, удерживающий вертикальное положение даже при воздействии на него внешних сил, привлек внимание ученых. Изучая его свойства, люди науки задумывались о практическом применении эффекта. Волчком интересовались англичанин Исаак Ньютон, российский академик Леонард Эйлер, опубликовавший в 1765 году труд «Теория движения твердых тел», и другие ученые.
Первые механические гироскопы появились в начале XIX века. Но только в 1852 году французский физик Леон Фуко предложил использовать устройство для контроля изменения направления и дал ему название «гироскоп». Первый промышленный гироскоп был создан в конце XIX века − австрийский инженер Людвиг Обри придумал использовать его для стабилизации курса торпеды.
Следующим шагом в истории гироскопии стало создание лазерного гироскопа. Подготовка к его «рождению» заняла практически весь XX век, ведь для этого нужно было подтянуть квантовую физику и создать новые методы обработки материалов. Разработка лазерных гироскопов началась в 1970-х годах, а массовое применение пришлось на 2000-е. Сегодня мы находимся на этапе развития нового поколения гироскопов – волновых твердотельных и микромеханических.
В наше время гироскопы применяются в самых разных областях: для стабилизации фото- и видеокамер, в мобильных устройствах и игровых контроллерах, в огнестрельном оружии и робототехнике, в гироскутерах и квадрокоптерах, в системах навигации и управления в авиации, на кораблях и в космосе. Современные гироскопы на МЭМС-технологиях могут достигать миллиметровых размеров.
Современные гироскопы на МЭМС-технологиях могут достигать миллиметровых размеров.
Устройство механического гироскопа
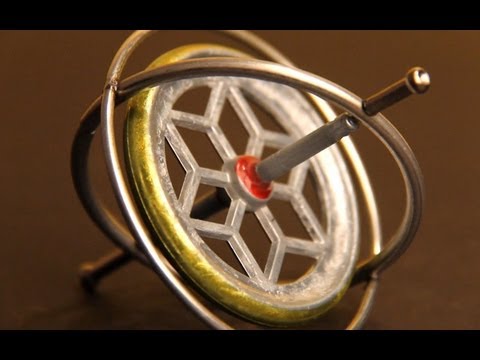
Как мы уже выяснили, гироскопы различаются в зависимости от принципа действия. Волчок, или юла – это простейший вариант механического гироскопа. Если массивный волчок раскрутить до достаточно высокой скорости, он сможет долго простоять в вертикальном положении, пока не затормозится, а также практически не отклоняться по вертикальной оси при применении к нему силы. Волчок не падает благодаря тому, что вращающееся тело стремится сохранить величину своей угловой скорости и направление оси вращения. Свободно вращающийся волчок под воздействием внешней силы отклоняется не в направлении этой силы, а перпендикулярно ей. Это явление называется прецессией.
Рассмотрим устройство на примере чуть более сложного роторного гироскопа с тремя степенями свободы. Подобный гироскоп, способный выполнять роль гирокомпаса, демонстрировал Леон Фуко. Три степени свободы гироскопа обеспечиваются с помощью карданового подвеса. Он состоит из двух колец: большого кольца, которое может вращаться вокруг вертикальной оси, и малого кольца, вращающегося вокруг горизонтальной оси. Внутри малого кольца закрепляется вращающееся тело – ротор. В результате благодаря кардановой системе подвеса ось ротора может иметь любое направление.
Три степени свободы гироскопа обеспечиваются с помощью карданового подвеса. Он состоит из двух колец: большого кольца, которое может вращаться вокруг вертикальной оси, и малого кольца, вращающегося вокруг горизонтальной оси. Внутри малого кольца закрепляется вращающееся тело – ротор. В результате благодаря кардановой системе подвеса ось ротора может иметь любое направление.
Механический гироскоп в движении
Для начала работы ротор раскручивается: чем быстрее раскручено колесо ротора, тем выше его сопротивление изменениям направления оси вращения. Как бы мы ни вращали все устройство, движущийся внутри него ротор сохраняет направление оси вращения в пространстве.
На этих свойствах вращающегося гироскопа основана работа гирокомпаса. Например, в авиации гирокомпас позволяет определять положение самолета в отсутствие ориентиров. Если самолет кренится в продольной или поперечной плоскости, с помощью гирокомпаса пилот увидит это отклонение по приборам.
При очевидной полезности у механического гироскопа есть ряд недостатков. Для его стабильной работы нужны уникальные подшипники и предельная балансировка. Кроме того, на точность показаний влияет неизбежное трение в осях устройства.
Лазерный гироскоп − до сих пор на высоте
Избавиться от перечисленных слабых мест механики удалось в гироскопах следующего поколения − лазерных. В основе работы лазерного гироскопа – эффект Саньяка, открытый еще в 1913 году. Его суть заключается в том, что время прохождения светового луча по замкнутому контуру зависит от того, покоится или вращается данный контур, а также от направления его вращения. Применить этот эффект в гироскопии удалось только с появлением лазеров.
Первые работы по созданию лазерного гироскопа были начаты практически одновременно в США и СССР. В 1962 году американские ученые В. Мацек и Д. Девис создали и запустили первый макетный образец лазерного гироскопа на базе кольцевого газового He-Ne-лазера. В середине 1963 года аналогичный результат был достигнут советскими учеными Л.Н. Курбатовым (НИИПФ) и В.Н. Курятовым (НИИ «Полюс» им. М.Ф. Стельмаха, сегодня входит в холдинг «Швабе» Ростеха).
В середине 1963 года аналогичный результат был достигнут советскими учеными Л.Н. Курбатовым (НИИПФ) и В.Н. Курятовым (НИИ «Полюс» им. М.Ф. Стельмаха, сегодня входит в холдинг «Швабе» Ростеха).
Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
Сегодня применяются лазерные гироскопы трех основных типов – вибрационный, фарадеевский и зеемановский. У первого частотная подставка основана на механическом реальном вращении гироскопа путем угловых вибраций, у второго и третьего – на искусственном, электрически управляемом расщеплении частот встречных волн в гироскопе. Лазерные гироскопы используются в составе инерциальных навигационных систем, позволяющих определять местоположение самолета без опоры на внешние источники информации.
Помимо НИИ «Полюс» им. М.Ф. Стельмаха на сегодняшний день масштабными производителями лазерных гироскопов являются Раменский приборостроительный завод и Тамбовский завод «Электроприбор», входящие в «Концерн Радиоэлектронные технологии». Их гироскопы применяются в навигационных устройствах, которые устанавливаются на десятки моделей российских самолетов и вертолетов. Несмотря на общую тенденцию к миниатюризации техники и на совершенствование гироскопов на основе микроэлектромеханических систем (МЭМС-технологии), лазерные гироскопы в силу своей высокой точности продолжают доминировать на рынке навигационных устройств.
Стабилизаторы качки Quick – polarstar-nautical.ru
Компания Quick SPA производит линейку гиростабилизаторов для лодок серии MC2. Они распространяются здесь — в США, дочерней компанией Quick ‘s USA со штаб-квартирой в Linthicum, MD. Компания Quick недавно добавила пять гироскопов на постоянном токе для небольших лодок, а также девять блоков переменного тока для судов среднего и яхтенного размера. Все они эффективны при стабилизации крена и гарантируют высокую производительность как на ходу, так и на якоре. Стабилизаторы MC2X отличаются компактностью и, по мнению компании, позволят снизить крен до 95%.
Все они эффективны при стабилизации крена и гарантируют высокую производительность как на ходу, так и на якоре. Стабилизаторы MC2X отличаются компактностью и, по мнению компании, позволят снизить крен до 95%.
Репортаж редактора — капитана Ника Мартинеса
Стабилизатор MC2 X5 Gyro
Внутри гиростабилизатора серии MC²X маховик вращается по вертикали, чтобы уменьшить износ подшипников.
Как это работает
Quick установил свой гироскоп на борту этой центральной консоли Buddy Davis и использует его для демонстрации продукта на лодках, показываемых на различных яхтенных выставках вверх и вниз по восточному побережью — например, на этой остановке в Аннаполисе.
Гиростабилизаторы Quick состоят из вращающегося маховика, установленного в карданной раме, что обеспечивает две из трех возможных степеней свободы вращения. Затем рама жестко крепится к определенному месту на судне. Чаще всего устройство располагается в машинном отделении судна, но может быть установлено в любом другом месте.
Процесс создания гиростабилизирующего момента состоит из трех взаимосвязанных частей. Обратите внимание, что каждая из этих вещей происходит в один и тот же момент времени, но полезно рассматривать каждую из них отдельно. Когда маховик вращается, следующий процесс приводит к развитию стабилизирующего момента, который противодействует качке:
- Волны заставляют судно крениться
- Движения, возникающие из-за качки, сочетаются с вращающимся маховиком для создания прецессионного движения
- Движение прецессии совмещается с вращающимся маховиком для создания стабилизирующего момента
Физика, которая вызывает эти переплетенные действия, называется гиродинамикой. Если маховик вращается в противоположном направлении, то вызываемое им прецессионное движение будет происходить в противоположном направлении, однако стабилизирующий момент будет одинаковым.
Немного о «Quick»
В нижней части активного пульта управления стабилизатора Quick используются гидравлические цилиндры для оптимизации крутящего момента.
Компания Quick-это итальянский производитель со штаб-квартирой в Равенне, Италия. Основанная в 1983 году, компания производит более 5000 морских продуктов-от лебедок и двигателей до осветительных приборов, водонагревателей и зарядных устройств. Компания Quick ведет бизнес в Северной и Южной Америке с 2006 года под руководством Quick USA и занимается бизнесом в Великобритании под руководством Quick Navial Equipment.
Ключевые характеристики:
- Компактный дизайн
- Высокая инсталляционная гибкость
- Функция блокировки прецессии с удаленной панели
- Оснащается электромоторами Quick
- Низкая шумовая эмиссия
- Мобильное приложение MC ² X (iOS и Android)
Отличительные признаки:
- Система воздушного охлаждения
Стабилизаторами MC2 можно управлять с помощью удаленного сенсорного экрана с графическим дисплеем. При желании судно может иметь несколько станций управления, а сенсорные экраны доступны в размерах 4” и 5″.
При желании судно может иметь несколько станций управления, а сенсорные экраны доступны в размерах 4” и 5″.
Мобильное приложение MC2 может записывать производительность стабилизатора. Мобильное приложение является всеобъемлющим и доступно для просмотра как на смартфонах, так и на планшетах (iOS и Android).
Параметры Калибровки
Существует формула точной калибровки единиц для любой лодки, которая выходит за пределы длины одной лодки. По этой причине необходима консультация с дистрибьютором Quick, чтобы сопоставить лодку с нужным гироскопом — услуга бесплатная. Компания Quick оценивает свои гироскопы переменного/постоянного тока на основании крутящего момента, генерируемого модулем для противодействия крену, измеряемого в нанометрах (N-m).
MC2 X2 DC
- Выходной крутящий момент: 2000 Н-м
- Максимальная потребляемая мощность 500 Вт
MC2 X3 DC
- Выходной крутящий момент 3900 Н-м
- Максимальная потребляемая мощность 750 Вт
MC2 X5 DC
- Выходной крутящий момент 5560 Н-м
- Максимальная потребляемая мощность 1250 Вт
MC2 X7 DC
- Выходной крутящий момент 6678 Н-м
- Максимальная потребляемая мощность 1300 Вт
MC2 X13 DC
- Выходной крутящий момент 12850 Н-м
- Максимальная потребляемая мощность 2500 Вт
MC2 X5 AC
- Выходной крутящий момент 5560 Н-м
- Максимальная потребляемая мощность 1400 Вт
MC2 X7 AC
- Выходной крутящий момент 6678 Н-м
- Максимальная потребляемая мощность 1500 Вт
MC2 X13 AC
- Выходной крутящий момент 12850 Н-м
- Максимальная потребляемая мощность 3000 Вт
MC2 X16 AC
- Выходной крутящий момент 16350 Н-м
- Максимальная потребляемая мощность 3200 Вт
MC2 X19
- Выходной крутящий момент 18700 Н-м
- Максимальная потребляемая мощность 3500 Вт
MC2 X25
- Выходной крутящий момент 25464 Н-м
- Максимальная потребляемая мощность 4500 Вт
MC2 X30
- Выходной крутящий момент 30333 Н-м
- Максимальная потребляемая мощность 6000 Вт
MC2 X40
- Выходной крутящий момент 40324 Н-м
- Максимальная потребляемая мощность 7000 Вт
MC2 X56
- Выходной крутящий момент 55882 Н-м
- Максимальная потребляемая мощность 7000 Вт
Демо-лодки Quick включают в себя Axopar 28 и Pardo 43, как было показано на недавней лодочной выставке в Генуа.
Новые стабилизаторы MC² Quick Gyro X2 и X3 предназначены для установки на небольшие лодки. Более конкретно, X2 идеально подходит для дневных крейсеров и малых центральных консольных катеров, в то время как X3 подходит для спортивных и малых каютных крейсеров. Для малых лодок, работающих на подвесных двигателях, идеальным вариантом станет компактный стабилизатор на батарейках 12V.
Потребляемая мощность для небольших блоков X2 и X3 составляет от 40 до 60 ампер. Они могут работать от домашних батарей правильного размера. В агрегатах используется очень специфическая смазка для подшипников, и количество смазки является критически важным, поэтому ежегодный осмотр и техническое обслуживание должны проводиться каждые 2000 часов сертифицированным специалистом, который также проверяет гидравлическое давление.
Стабилизаторы MC² Quick Gyro X5, X7 и X13 предназначены для установки на большие лодки. Выбор между блоками постоянного тока и традиционной серией переменного тока будет зависеть от возможного наличия источника питания переменного тока на борту.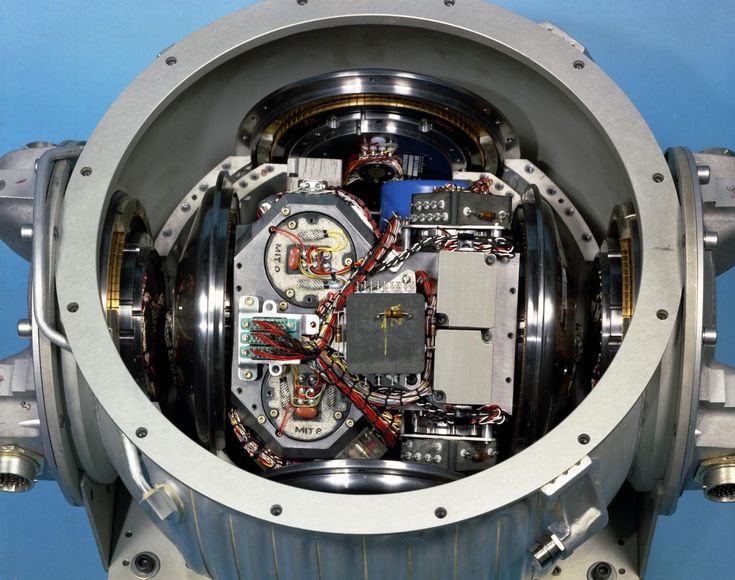 Быстрые гироскопы могут быть подобраны к любой лодке до 250 тонн или около 120′ (36,58 м) в длину.
Быстрые гироскопы могут быть подобраны к любой лодке до 250 тонн или около 120′ (36,58 м) в длину.
Обозрение
Эта фотография служит наглядным примером, никакой качки – идеально!
Стабилизаторы качки Quick заметно улучшат комфорт на борту, сократив крен до 95 процентов, и дадут возможность наслаждаться катанием на лодке независимо от морских условий. Мы отмечаем, что блоки накручиваются относительно быстро, за 14 минут, и тихо работают на уровне 70 дБ. BoatTEST с нетерпением ждет возможности испытать гироскопы Quick.
Источник: https://www.boattest.com/quick-gyro-stabilizers
Krylov A.N. — Sobranie sochinenie
Krylov A.N. — Sobranie sochinenieТом 8. — Механика — 1950 — 350 с.
СОДЕРЖАНИЕ
От Комиссии по изданию Собрания трудов академика А. Н. Крылова
Общая теория гироскопов и некоторых технических их применений
- Предисловие
- Введение.
 Основные сведения из кинематики и динамики твердого тела
Основные сведения из кинематики и динамики твердого тела
- § 1, 2. Преобразование координат в пространстве. Соотношения между косинусами углов между осями двух прямолинейных прямоугольных систем координат
- § 3. Эйлеровы углы. Выражение косинусов углов между осями через Эйлеровы углы
- § 4, 5. Движение твердого тела поступательное и вращательное. Угловая скорость. Сложение и разложение угловых скоростей
- § 6. Линейная скорость точки твердого тела. Выражение ее проекций на оси координат
- § 7. Выражение проекций угловой скорости через Эйлеровы углы и их производные
- § 8. Начало возможных перемещений. Определение положения равновесия материальной системы
- § 9.
 Методы Лагранжа: 1) способ множителей, 2) способ обобщенных координат
Методы Лагранжа: 1) способ множителей, 2) способ обобщенных координат
- § 10. Составление уравнений движения материальной системы. Начало д’Аламберта. Первая Лагранжева форма
- § 11, 12. Вторая Лагранжева форма уравнений движения материальной системы
- § 13. Живая сила твердого тела. Моменты инерции. Главные оси
- § 14. Закон количеств движения
- § 15. Закон моментов количеств движения
- § 16. Уравнения движения твердого тела
- § 17. Количество движения и момент количеств движения для твердого тела
- § 18. Составление уравнений движения твердого тела на основании законов количеств движения и момента количеств движения
- § 19.
 20. Интегрирование линейных дифференциальных уравнений второго порядка с постоянными коэффициентами
20. Интегрирование линейных дифференциальных уравнений второго порядка с постоянными коэффициентами
- § 21. Определение постоянных произвольных по начальным условиям. Свободные колебания, погашение их
- § 22, 23. Вынужденные колебания. Явления резонанса. Примеры из теории качаний корабля на волнении
- § 24, 25. Интегрирование системы двух совокупных линейных уравнений второго порядка с постоянными коэффициентами
- § 26. Определение постоянных произвольных по начальным условиям
- § 27. Нахождение частного интеграла
- § 28. Случай мнимых корней характеристического уравнения
- § 29. Численное вычисление корней алгебраических уравнений третьей и четвертой степени
- Часть первая.
 Аналитическое изложение общей теории гироскопов
Аналитическое изложение общей теории гироскопов
- Глава I. Простейшие случаи движения тела вращения
- § 30. Движение твердого тела вращения по инерции. Применение уравнений Эйлера
- § 31. Применение второй Лагранжевой формы. Прецессия и нутация земной оси
- § 32. Движение с постоянной прецессией без нутации. Прецессия быстрая и медленная
- § 33. Определение реакций вращающихся тел на оси. Примеры: турбина на корабле. Гребные колеса
- § 34. 35. Движение волчка под действием силы тяжести. Влияние трения
- § 36. Влияние периодических возмущающих сил
- Глава II. Гироскоп Фуко и его видоизменения
- § 37.
 Устройство гироскопа Фуко
Устройство гироскопа Фуко
- § 38. Гироскоп Фуко с тремя степенями свободы, когда ось наружного кольца направлена по оси мира
- § 39, 40. Движение материальной точки при трении. Влияние трения в осях колец на гироскоп Фуко, необходимость большой угловой скорости вращения маховика
- § 41. Гироскоп Фуко с тремя степенями свободы, когда ось наружного кольца вертикальна
- § 42. Гироскоп Фуко с двумя степенями свободы — внутреннее кольцо скреплено неподвижно с наружным
- § 43. Гироскоп Фуко с двумя степенями свободы — наружное кольцо закреплено в плоскости меридиана места
- § 44. Влияние массы колец на гироскоп Фуко
- § 37.
- Глава III. Гироскоп на подвижном фундаменте
- § 45.
 Общая метода исследования движения гироскопа, находящегося на подвижном по отношению к Земле фундаменте
Общая метода исследования движения гироскопа, находящегося на подвижном по отношению к Земле фундаменте
- § 46. 47. Маятниковый кренометр на корабле. Кренометр малого и кренометр большого периода
- § 48. Влияние трения в осях подвеса
- § 49, 50. Гидравлический успокоитель в применении к маятниковому кренометру
- § 51–53. Гироскопический маятник. Применение к нему гидравлического успокоителя. Влияние вращения Земли
- § 54–57. Гироскопический компас, курсовая погрешность гирокомпоса, баллистическая погрешность гирокомпаса
- § 45.
- Глава IV. Применение гироскопа для стабилизации
- § 58–61. Успокоитель качки корабля. Система Шлика. Система Сперри.
 Случай свободного гироскопа
Случай свободного гироскопа
- § 62. Применение электромагнитного тормоза к успокоителю качки
- § 63. Активный успокоитель Сперри
- § 64. Стабилизация платформы на корабле помощью гироскопов
- § 58–61. Успокоитель качки корабля. Система Шлика. Система Сперри.
- Глава I. Простейшие случаи движения тела вращения
- Часть вторая. Описание некоторых гироскопических приборов
- § 65. Прибор адмирала Париса. Гироскопический коллиматор адмирала Флерие
- § 66. Прибор Обри
- § 67. Гирокомпас Аншютца
- § 68. Гирокомпас Сперри
- § 69. Гирокомпас Брауна
- § 70. Гироскопический замыкатель Круппа для стрельбы на качающемся корабле
- § 71.
 Указатель горизонта для аэропланов
Указатель горизонта для аэропланов
- § 72. Стабилизатор Сперри. Стабилизатор Фиэ. Прибор Петровача для записи качки
- О вибрации фундаментов не вполне уравновешенных машин и способах ее уменьшения
- Движение сферического маятника
- О движении материальной точки относительно поверхности Земли
- О перемещениях твердого тела
Гирокомпас – Основной принцип, работа и использование на кораблях
Гирокомпас – это навигационный компас, содержащий гироскопический двигатель, который регистрирует направление истинного севера вдоль поверхности земли и не зависит от магнетизма.
или
Компас с моторизованным гироскопом, угловой момент которого взаимодействует с силой, создаваемой вращением Земли, чтобы поддерживать ориентацию оси вращения гироскопа с севера на юг, тем самым обеспечивая стабильную привязку направления.
Принцип работы гироскопа
Гироскоп состоит из вращающегося колеса или ротора, содержащегося в карданном подвесе, который обеспечивает движение вокруг трех взаимно перпендикулярных осей, известных как горизонтальная ось , вертикальная ось и ось вращения . При быстром вращении, если не учитывать трение, гироскоп развивает гироскопическую инерцию , стремясь бесконечно вращаться в одной и той же плоскости. Величина гироскопической инерции зависит от угловой скорости, массы и радиуса колеса или ротора.
PC: ed-thelen.org
Основная ось гирокомпаса
Если гироскоп расположить на экваторе так, чтобы его ось вращения была направлена с востока на запад, когда Земля вращается вокруг своей оси, гироскопическая инерция будет стремиться сохранить плоскость постоянная вращения. Наблюдатель видит, что вращается гироскоп, а не Земля. Этот эффект называется горизонтальной земной скоростью и максимален на экваторе и равен нулю на полюсах. В точках между ними он равен косинусу широты.
В точках между ними он равен косинусу широты.
Если гироскоп поместить на географический полюс с горизонтальной осью вращения, будет казаться, что он вращается вокруг своей вертикальной оси. Это вертикальная земная скорость . Во всех точках между экватором и полюсами гироскоп, кажется, вращается частично вокруг своей горизонтальной и частично вокруг своей вертикальной оси под влиянием как горизонтальной, так и вертикальной земной скорости. Чтобы визуализировать эти эффекты, помните, что гироскоп, на какой бы широте он ни был расположен, остается выровненным в пространстве, в то время как Земля движется под ним.
Вырезанная часть гирокомпаса
Работа гирокомпаса
Работа гирокомпаса зависит от четырех природных явлений:
ПК: ed-thelen.org
Чтобы превратить гироскоп в гирокомпас, колесо или ротор монтируют в сфере, называемой гиросферой, а затем сфера поддерживается в вертикальном кольце. Вся сборка смонтирована на базе под названием 9.0011 фантом . Гироскоп в гирокомпасе может быть маятниковым или некачающимся, в зависимости от конструкции. Ротор может весить от 0,5 до 25 кг.
Вся сборка смонтирована на базе под названием 9.0011 фантом . Гироскоп в гирокомпасе может быть маятниковым или некачающимся, в зависимости от конструкции. Ротор может весить от 0,5 до 25 кг.
Чтобы заставить его искать и поддерживать истинный север, необходимы три вещи.
- Во-первых, гироскоп должен оставаться в плоскости меридиана.
- Во-вторых, он должен оставаться в горизонтальном положении.
- В-третьих, он должен оставаться в этом положении, как только достигнет его, независимо от того, что делает судно, на котором он установлен, или куда он идет по земле.
Чтобы заставить его искать меридиан , к нижней части вертикального кольца добавляется груз, заставляющий его качаться вокруг своей вертикальной оси и, таким образом, стремиться выровняться по горизонтали. Он будет колебаться, поэтому к стороне сферы, в которой находится ротор, добавляется второй груз, который гасит колебания до тех пор, пока гироскоп не остановится на меридиане. С этими двумя весами единственно возможное положение равновесия находится на меридиане с горизонтальной осью вращения.
С этими двумя весами единственно возможное положение равновесия находится на меридиане с горизонтальной осью вращения.
Чтобы заставить гироскоп искать север , система резервуаров, заполненных ртутью, известная как ртутная баллистика, используется для приложения силы против оси вращения. Баллистики, обычно четыре, размещены так, что их центры тяжести точно совпадают с центром тяжести гироскопа. Затем прецессия заставляет ось вращения следовать по эллипсу, на завершение одного эллипса уходит около 84 минут. (Это период колебаний маятника с плечом, равным радиусу Земли.) Чтобы заглушить это колебание, сила приложена не в вертикальной плоскости, а немного восточнее вертикальной плоскости. Это приводит к тому, что ось вращения движется по спирали, а не по эллипсу, и в конечном итоге останавливается на меридиане, указывающем на север.
Использование гирокомпаса
Так как гирокомпас не подвержен влиянию магнетизма, он не подвержен изменениям или отклонениям.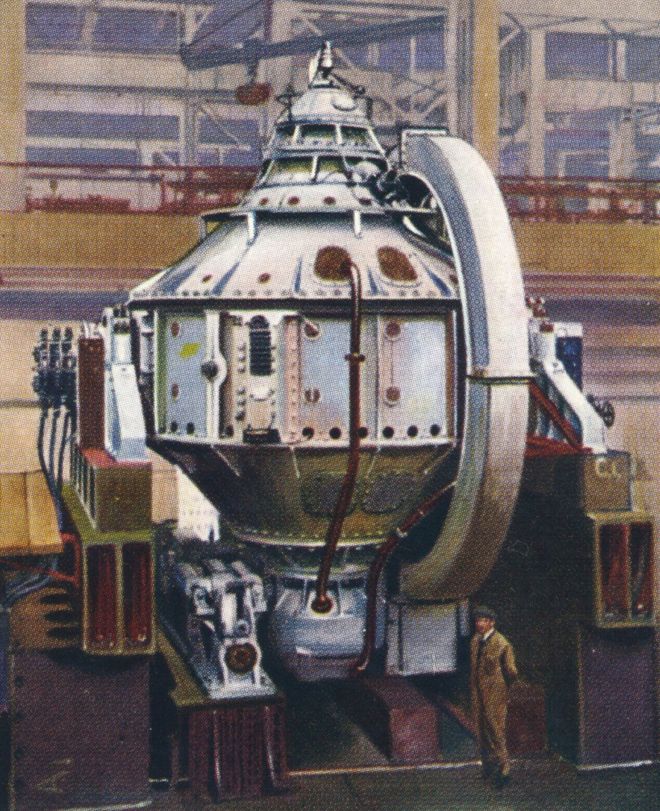 Любая ошибка постоянна и одинакова по всему горизонту и часто может быть уменьшена менее чем до одного градуса, что эффективно устраняет ее полностью. В отличие от магнитного компаса, он может выводить сигнал на ретрансляторы, расположенные вокруг судна в критических точках.
Любая ошибка постоянна и одинакова по всему горизонту и часто может быть уменьшена менее чем до одного градуса, что эффективно устраняет ее полностью. В отличие от магнитного компаса, он может выводить сигнал на ретрансляторы, расположенные вокруг судна в критических точках.
Но для этого также требуется постоянный источник стабильной электроэнергии, и в случае потери электроэнергии требуется несколько часов, чтобы снова установиться на меридиане, прежде чем его можно будет использовать. Этот период можно сократить, выровняв компас по меридиану перед включением питания.
Направляющая сила гирокомпаса зависит от величины прецессии, которой он подвергается, которая, в свою очередь, зависит от широты. Таким образом, направляющая сила максимальна на экваторе и уменьшается до нуля на полюсах. Суда, работающие в высоких широтах, должны строить кривые ошибок на основе широт, потому что ошибки в высоких широтах в конечном итоге превышают способность компаса их исправлять.
Гирокомпас обычно располагается на рулевой рубке как можно ближе к центру крена, тангажа и рыскания судна, что сводит к минимуму ошибки, вызванные движением судна.
Ретрансляторы расположены в удобных местах по всему кораблю, например, у штурвала для управления, на крыльях мостика для определения пеленга, в корме для аварийного управления и в других местах. Выход также можно использовать для управления самописцами курса, системами автопилота, плоттерами, системами управления огнем и стабилизированными радарами. Повторители следует регулярно проверять относительно главного устройства, чтобы убедиться, что все они выровнены. Ретрансляторы на крыле мостика, используемые для пеленгования, скорее всего, будут оснащены съемными пеленгаторными кругами и азимутальными кругами.
Гироскопическая стабилизация для лодок | Marlin Magazine
Гироскопическая стабилизация становится все более распространенной при строительстве и ремонте лодок.
Судостроители, такие как Viking, теперь включают гироскопы как неотъемлемую часть процесса проектирования с обозначенным местом, если владелец захочет добавить его. Предоставлено Viking Yachts, Форест Джонсон Возможно, три из самых больших особенностей в истории лодок для спортивной рыбалки — помимо дизайна корпуса — это подвесной мостик, башня для тунца и мезонин. Но теперь четвертый меняет правила игры: гироскопическая стабилизация. Если строители хотят продать новую лодку в наши дни, им лучше планировать установку гироскопа. Лодки разного размера могут работать с гироскопами, в том числе со стабилизаторами для небольших лодок.
Но теперь четвертый меняет правила игры: гироскопическая стабилизация. Если строители хотят продать новую лодку в наши дни, им лучше планировать установку гироскопа. Лодки разного размера могут работать с гироскопами, в том числе со стабилизаторами для небольших лодок.
История гироскопов-стабилизаторов
Первые экспериментальные гироскопы были разработаны в конце 1860-х и начале 1900-х годов, но с далеко не желаемыми результатами. Эту технологию использовали несколько крупных кораблей, в том числе военно-транспортный корабль USS Henderson в 1917 году, имевший две 25-тонные единицы, и итальянский круизный лайнер, использовавший три больших единицы в 1930 году. Стоимость и вес систем были непомерно высокими, и другие формы стабилизации стали более доступными. Стабилизация внешним плавником, которая использовала скорость судна для создания стабилизации против крена, стала более популярной, но ни в коем случае не более практичной, особенно среди рыболовов-спортсменов.
Как работает гироскопический стабилизатор?
Гироскоп стабилизирует лодку за счет энергии, которую он создает, вращая маховик с высокими оборотами в минуту. Последующий угловой момент или стабилизирующая сила определяется весом, диаметром и числом оборотов маховика и измеряется в ньютон-метрах — единице крутящего момента. Выходная мощность в ньютон-метрах — это количество энергии, которое устройство способно генерировать для стабилизации лодки. Чем больше мощность, тем больше крутящий момент, создаваемый гироскопом для стабилизации лодки.
Последующий угловой момент или стабилизирующая сила определяется весом, диаметром и числом оборотов маховика и измеряется в ньютон-метрах — единице крутящего момента. Выходная мощность в ньютон-метрах — это количество энергии, которое устройство способно генерировать для стабилизации лодки. Чем больше мощность, тем больше крутящий момент, создаваемый гироскопом для стабилизации лодки.
Реклама
Seakeeper продолжает расширять линейку продуктов
Несколько компаний производят гироскопы для лодок для спортивной рыбалки, и у них есть устройства, подходящие практически для любого применения в индустрии спортивной рыбалки. Seakeeper, самый быстрорастущий бренд, предлагает устройства практически для всех современных рыболовных лодок. За 10 лет компания не только создала спрос на рынке новых лодок, но и модернизировала все виды лодок.
Гироскопы Mitsubishi автономны, не имеют внешних частей и не нуждаются в охлаждении сырой водой. Доступны четыре модели, подходящие для сосудов различных размеров. Производитель
ПроизводительАгрессивный новый период разработки продукта улучшил технологические качества, а также уменьшил общий размер каждой единицы и снизил затраты. Последние предложения компании включают Seakeeper 2 для лодок от 27 до 32 футов, Seakeeper 3 для лодок от 30 до 39 футов, Seakeeper 5 для лодок от 40 до 45 футов и до 20 тонн, Seakeeper 6 для лодок от 46 до 52 футов и до 20 тонн. 24 тонны, Seakeeper 9 для лодок от 50 до 59 футов до 30 тонн, Seakeeper 16 для лодок от 65 до 69 футов до 50 тонн, Seakeeper 18 для лодок от 65 до 75 футов и до 56 тонн, Seakeeper 26 для лодок от 70 до 84 футов и водоизмещением до 75 тонн и Seakeeper 35 для судов длиной более 85 футов и 100 тонн. Дополнительные компактные конструкции позволяют устанавливать несколько блоков, чтобы соответствовать требованиям по тоннажу и ограниченному пространству большинства лодок, а также они могут быть установлены вне центральной линии для различных применений.
Возможно, самым интересным из них является модель Seakeeper Heavy Duty Line, рассчитанная на интенсивное использование более 1000 часов в год. В линейку Heavy Duty входят модели Seakeeper 7HD для лодок от 45 до 54 футов, Seakeeper 12HD для лодок от 55 до 64 футов, Seakeeper 20HD для лодок от 65 до 74 футов и Seakeeper 30 HD для лодок длиной более 75 футов.
В линейку Heavy Duty входят модели Seakeeper 7HD для лодок от 45 до 54 футов, Seakeeper 12HD для лодок от 55 до 64 футов, Seakeeper 20HD для лодок от 65 до 74 футов и Seakeeper 30 HD для лодок длиной более 75 футов.
Advertisement
Seakeeper требует систему охлаждения сырой водой для своих устройств, а также питание постоянным и переменным током через инвертор для питания элементов управления.
Стабилизатор гироскопа Mitsubishi
Компания Mitsubishi также разработала гироскопы стабилизатора поперечной устойчивости для рынка спортивной рыбалки. Стабилизатор Tohmei Anti Rolling Gyro, производимый Mohmei, теперь называется стабилизатором Tohmei. Для его установки требуется только крепление болтами к лодке и подключение к сети. Его устройство полностью автономно, без внешних движущихся частей и без необходимости охлаждения сырой водой. Tohmei Anti Rolling Gyros выпускается в четырех моделях: ARG50T/65T, ARG175T, ARG250T/250T-1 и ARG375T.
Для правильной работы устройств необходимо соблюдать рекомендуемую каждой компанией процедуру установки. Крутящий момент, создаваемый маховиком, требует, чтобы узлы стали неотъемлемой частью лодки и были привязаны к основным стрингерам и усиленным частям лодки. Это затрудняет модернизацию. Только первоначальный строитель или опытная верфь должны выполнять такую работу, потому что у них есть возможность интегрировать систему крепления в конструкцию лодки. Тем не менее, большая часть бизнеса Seakeeper связана с модернизацией, поэтому возможность легко доступна.
Крутящий момент, создаваемый маховиком, требует, чтобы узлы стали неотъемлемой частью лодки и были привязаны к основным стрингерам и усиленным частям лодки. Это затрудняет модернизацию. Только первоначальный строитель или опытная верфь должны выполнять такую работу, потому что у них есть возможность интегрировать систему крепления в конструкцию лодки. Тем не менее, большая часть бизнеса Seakeeper связана с модернизацией, поэтому возможность легко доступна.
Реклама
Гироскопические стабилизаторы оказывают большое положительное влияние на рыбалку в течение дня
Я ездил на нескольких лодках с гироскопами, а совсем недавно провел время на 66-футовом Viking. Лодка реагировала, как и ожидалось, в волнистом море, с небольшим креном и треском, когда устройство находилось в режиме ожидания. Как только переключатель блока Seakeeper был щелкнут, он напрягся и подпрыгнул, как пробка, с небольшим креном или рысканьем. Как я уже говорил, с этого момента будет трудно продать лодку без стабилизатора поперечной устойчивости. Если вы заказываете новую лодку, стисните зубы и установите устройство. Это сделает дни на воде более приятными и поможет вашей перепродаже.
Если вы заказываете новую лодку, стисните зубы и установите устройство. Это сделает дни на воде более приятными и поможет вашей перепродаже.
Гирокомпас – Знание Моря
Главный гирокомпас корабля показывает курс судна относительно истинного севера.
Гирокомпас представляет собой форму гироскопа, широко используемого на кораблях, в котором используется быстро вращающееся гироскопическое колесо с электрическим приводом и силы трения, а также другие факторы, использующие основные физические законы, влияние гравитации и вращения Земли для определения истинного севера.
Гирокомпас представляет собой электромеханический прибор, работающий за счет гироскопической инерции колеса, вращающегося с очень высокой скоростью. На него не действует магнитное воздействие.
При правильном рабочем порядке гирокомпас постоянно указывает на истинный север.
Поскольку он питается от электричества, он будет бесполезен при отключении электричества.
Основное устройство называется главным гироскопом, а другие устройства, получающие от него входные данные, называются повторителями.
Главный гирокомпас отправляет курс судна на ретрансляторы, расположенные в разных местах корабля, для удобства навигации. Это показано на блок-схеме ниже.
Бесплатный гироскоп
Гироскоп представляет собой вращающееся колесо или ротор, в котором ось может принимать любую ориентацию.
Показан гироскоп с вращающимся ротором
Его подшипники установлены в металлической раме, называемой карданом, этот кардан установлен внутри другого карданного подвеса, подшипник которого находится под углом 90° к внутреннему кардану. Может быть три или четыре подвеса.
Последний, внешний карданный вал крепится к судну таким образом, что когда судно поворачивается на левый или правый борт, вращающийся ротор с помощью кардана может продолжать указывать на фиксированную точку в пространстве.
Чтобы заставить вращающийся ротор указывать на истинный север, а не на фиксированную точку в пространстве, мы полагаемся на свойство вращающихся дисков, называемое прецессией.
Прецессия заставляет вращающийся ротор поворачиваться влево или вправо, если мы оказываем вертикальное давление на конец оси вращающегося гироскопа.
Основные свойства гироскопа
Гироскопы обладают двумя основными свойствами:
- Жесткость в пространстве
Ось вращения гироскопа имеет тенденцию оставаться в пространстве в том же направлении, в котором он запущен.
Свободно вращающийся гироскоп сохраняет свою ось вращения в одном и том же направлении в пространстве независимо от того, как повернута его опорная база.
Он сопротивляется любой силе, пытающейся повернуть его ось вращения в новом направлении.
Это свойство называется «жесткостью в пространстве»
- Прецессия
Прецессия заставляет вращающийся ротор скручивать ось вращения против часовой стрелки, когда к концу оси гироскопа прикладывается восходящая вертикальная опрокидывающая сила , как показано на рисунке
Ось вращения гироскопа будет прецессировать в другом направлении (по часовой стрелке), если приложенная опрокидывающая сила направлена вниз.
ГИРОК ВСЕГДА БУДЕТ ПРЕЦЕСТИРОВАТЬ ПОД ПРЯМЫМ УГЛОМ К НАПРАВЛЕНИЮ ПРИЛОЖЕННОЙ СИЛЫ.
Это свойство называется прецессией.
Прецессия заставляет гироскоп указывать в разных направлениях в зависимости от силы, приложенной к любому концу оси вращения.
Благодаря прецессии мы можем управлять направлением оси вращения.
Это позволяет нам направить ось вращения туда, куда мы хотим. Без прецессии жесткость гироскопа была бы бесполезна.
Механически или электрически применяя силы для прецессии гироскопа, этот гироскоп начинает ориентироваться на север, чтобы его можно было использовать в качестве компаса.
Принцип действия гироскопа на север
Принцип действия гирокомпаса основан на использовании свойств
- Гироскопа
- суточного вращения Земли
В однороторном гирокомпасе используется свободный гироскоп, центр тяжести которого смещается в экваториальной плоскости ниже точки подвеса, то есть позиционный гироскоп.
Конструкция
В маятниковом гирокомпасе ротор заключен в камеру, к нижней части которой прикреплен груз.
Камера установлена во внешнем кольце карданного подвеса, ось вращения которого расположена вертикально.
Принцип работы
Когда ось АВ ротора не находится в плоскости меридиана (при отклонении его на восток или запад), он будет отклоняться от плоскости горизонта из-за вращения Земли, т.к. ротор, в соответствии со свойствами свободного гироскопа, стремится сохранить свою ориентацию относительно звезд.
Например, если его конец В отклонится к востоку, он поднимется, как бы следуя за восходом звезд. Вместе с осью АВ патронник и груз будут отклоняться относительно плоскости горизонта.
В результате будет создан момент силы тяжести относительно точки подвеса, который вызовет прецессию оси АВ к плоскости меридиана.
Колебание оси вращения
При своем движении ось AB проходит через плоскость меридиана, после чего начинает прецессировать в обратном направлении под действием момента силы тяжести.
Эта ось AB качается (колеблется) на восток и запад от плоскости меридиана.
Механизм демпфирования колебаний
Для того чтобы гирокомпас указывал на север, необходимо, чтобы колебания были гашены, чтобы прибор мог установиться на меридиане, а не проходить через него. Демпфирование колеблющейся оси AB связано с изменением ее энергетического состояния путем противодействия скорости тела.
Использовались два основных метода демпфирования.
- Применение антимаятникового крутящего момента, вызванного ограничением потока вязкой жидкости в ответ на наклон гироскопического элемента.
- С системой слежения с силовым приводом, известной как фантомное кольцо, которая представляет собой тип сервомеханизма, который служит для демпфирования оси вращения AB по направлению к меридиану.
Поиск на север
После затухания этих колебаний ось АВ становится фиксированной в плоскости меридиана в направлении север-юг.
Краткое описание гирокомпаса
Гирокомпас работает по принципу гироскопа. Гироскоп — это устройство, в котором тяжелое колесо вращается с высокой скоростью.
Гироскоп — это устройство, в котором тяжелое колесо вращается с высокой скоростью.
Это заставляет колесо оси искать направление в пространстве и оставаться в этом направлении, пока его не потревожат.
Ось вращения гироскопа имеет тенденцию оставаться фиксированной в пространстве в том направлении, в котором он запущен.
Механически или электрически применяя силы для прецессии гироскопа, этот гироскоп становится ориентированным на север, так что его можно использовать в качестве компаса.
Гирокомпас используется для определения курса судна и пеленга судов или других судов, которые приближаются к нашему судну или находятся в непосредственной близости от него.
Гирокомпас также используется для визуального пеленгования объектов, находящихся в непосредственной близости от судна, для определения местоположения судна.
Поскольку гирокомпас является электрическим оборудованием, его можно использовать для передачи данных о курсе другому оборудованию, такому как РАДАР, ЭКНИС, самописец курса и оборудованию по мере необходимости.
Использование и ошибки
Гирокомпасы преимущественно используются на большинстве кораблей для определения истинного севера, управления и определения местоположения и записи курса.
Но из-за кораблей (i) курса (ii) скорости и (iii) широты могут возникнуть некоторые ошибки в показаниях гирокомпаса.
Установлено, что:
- На северных курсах гирокомпас немного отклоняется к западу от истинного меридиана.
- На южных курсах отклоняется на восток.
Современные суда используют систему GPS или другие навигационные средства, передающие данные в гирокомпас для исправления ошибки.
Конструктивные особенности гирокомпасной системы
Гирокомпас стал одним из незаменимых приборов почти на всех торговых или военно-морских судах благодаря своей способности определять направление на истинный север, а не на магнитный север. Состоит из следующих блоков:
Главный компас
Обнаруживает и поддерживает показания истинного севера с помощью гироскопа
Повторяющие компасы
Получают и показывают истинное направление, передаваемое электрически от главного компаса.