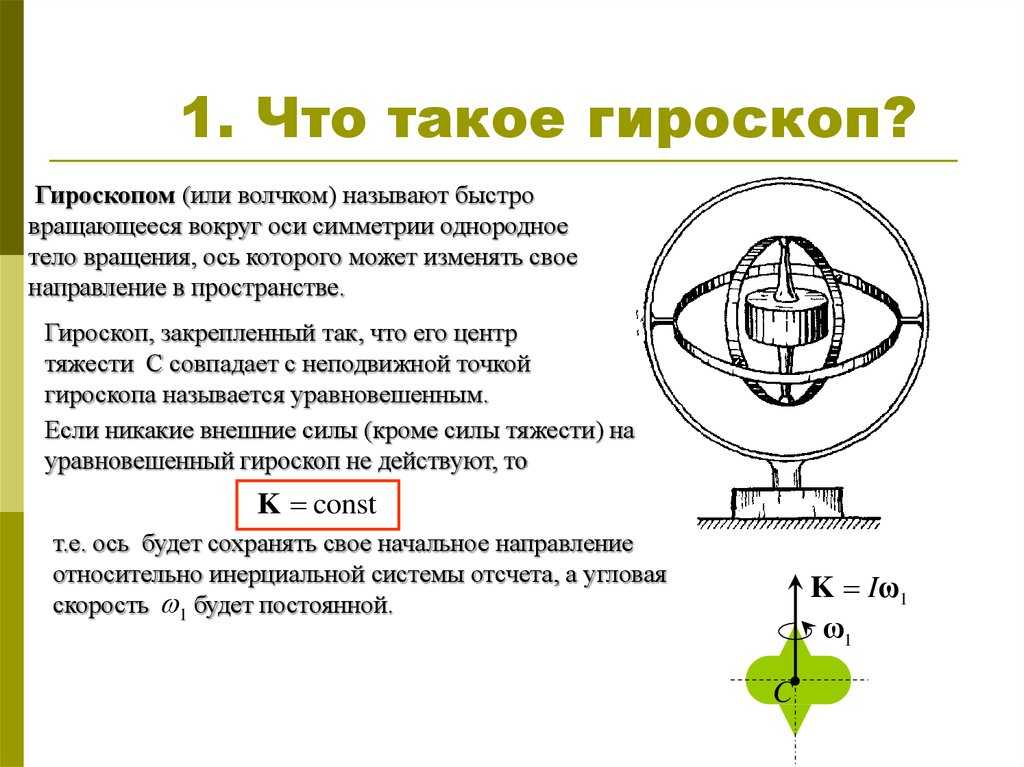
3.2 Структурные схемы оптических гироскопов
На рис. 3.3 приведены общие схемы систем, разработанных для повышения точности измерений. Кольцевой лазерный гироскоп (рис. 3.3, а) отличается высокой частотой световой волны — до нескольких сотен терагерц. Волоконно-оптический гироскоп на (рис. 3.3, б) имеет высокую чувствительность, благодаря использованию длинного одномодового оптического волокна с низкими потерями. В оптическом гироскопе пассивного типа с кольцевым резонатором (рис. 3.3, в) используется острая резонансная характеристика резонатора.
Рис. 3.3 – Структурные схемы гироскопов на эффекте Саньяка
r и l – частота генерации света с правым и левым вращением; – время, необходимое для однократного прохождения светом кольцевого оптического пути; FSR – полный спектральный диапазон
На
рис. 3.3 приведена оптическая схема
волоконно-оптического гироскопа. По
сути это интерферометр Саньяка (см. рис.
3.1), в котором круговой оптический контур
заменен на катушку из длинного одномодового
оптического волокна. Часть схемы,
обведенная штриховой линией, необходима
для повышения стабильности нулевой
точки.
3.3 приведена оптическая схема
волоконно-оптического гироскопа. По
сути это интерферометр Саньяка (см. рис.
3.1), в котором круговой оптический контур
заменен на катушку из длинного одномодового
оптического волокна. Часть схемы,
обведенная штриховой линией, необходима
для повышения стабильности нулевой
точки.
Рис. 3.4 – Принципиальная оптическая схема волоконно-оптического гироскопа
Таким образом, разность фаз между двумя световыми волнами, обусловленная эффектом Саньяка
(3.6)
где N — число витков в катушке из волокна; L — длина волокна; а — радиус катушки.
Следует обратить внимание на то, что в основные формулы не входит коэффициент преломления света в волокне.
Благодаря
совершенствованию технологии производства
выпускается волокно с очень низкими
потерями. Чтобы не повредить волокно,
намотка производится на катушку радиусом
несколько сантиметров. При этом не
наблюдается сколько-нибудь заметного
увеличения потерь. Можно создать
сравнительно малогабаритный и
высокочувствительный интерферометр
Саньяка с катушкой небольшого радиуса
(2…5 см), намотав на нее волокно большой
длины. Сформировав оптимальную оптическую
систему, можно измерять с высокой
точностью изменения фазы (в инерциальной
навигации — порядка 10
Чтобы не повредить волокно,
намотка производится на катушку радиусом
несколько сантиметров. При этом не
наблюдается сколько-нибудь заметного
увеличения потерь. Можно создать
сравнительно малогабаритный и
высокочувствительный интерферометр
Саньяка с катушкой небольшого радиуса
(2…5 см), намотав на нее волокно большой
длины. Сформировав оптимальную оптическую
систему, можно измерять с высокой
точностью изменения фазы (в инерциальной
навигации — порядка 10
Поскольку данный волоконно-оптический гироскоп — пассивного типа, в нем отсутствуют такие проблемы, как явление синхронизма.
Пределы
обнаружения угловой скорости. В основной оптической системе на (рис.
3.3) в состоянии оптические пути для света
в обоих направлениях обхода будут
одинаковы по длине, а поскольку сигнал
на выходе светоприемника изменяется
пропорционально
,
то гироскоп нечувствителен к очень
малым поворотам.
Рис.3.5, а. Чувствительность волоконно-оптического гироскопа при дробовом шуме светоприемника при оптимальной длине волокна | Рис.3.5, б. Чувствительность волоконно-оптического гироскопа при дробовом шуме светоприемника при разной длине световой волны |
Результаты
расчета при типичных значениях параметров
приведены на рис. 3.5, а. Для оптического
волокна с потерями 2 дБ/км пределы
обнаружения примерно 10-8 рад/с (0,001/ч).
В реальных волоконно-оптических гироскопах возможности ограничены шумовыми факторами.
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ЕМКОСТНЫХ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ Известия высших учебных заведений Приборостроение
Аннотация.
Рассмотрены схемы замещения емкостного микромеханического гироскопа и проведен анализ используемых схем измерительных преобразователей. С целью исключения влияния паразитных емкостей и сопротивлений схемы замещения параметрического преобразователя и неидеальности усилителей измерительного преобразователя предложено использовать временное разделение каналов преобразования искомых параметров.
Ключевые слова: емкостной микромеханический гироскоп, схема замещения, информативный параметр, измерительный преобразователь, коррекция погрешности, фазовое разделение каналов
Список литературы:
1. Пешехонов В. Г. Современное состояние и перспективы развития гироскопических систем // Гироскопия и навигация. 2011. № 1. С. 3—17.
2. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б. С. Алёшина, К. К., Веремеенко, А. И. Черноморского. М.: ФИЗМАТЛИТ, 2006. 424 с. ISBN 5-9221-0735-6.
3. Аверин И. А., Пауткин В. Е. Особенности формирования микроэлектромеханических элементов первичных преобразователей информации // Изв.
4. Бохов О. С., Спивак А. М., Орехов Ю. А. Миниатюрные навигационно-ориентационные интегрированные модули на основе микроэлектромеханических систем // Нано- и микросистемная техника. 2012. № 12(149). С. 55—60.
5. Arbuzov V. P. The use of time division of the channels in capacitive and inductive sensor measuring circuits // Measurement Techniques. 2007. Vol. 50, N 7. P. 752—757. DOI: 10.1007/s11018-007-0144-x.
6. Моисеев Н. В. Микромеханический гироскоп компенсационного типа с расширенным диапазоном измерения: Автореф. дис. канд. техн. наук. СПб, 2015.
7. Arbuzov V. P., Vodovskova P. N., Mishina M. A. The use of phase division of the channels of measuring circuits to measure the parameters of multidimensional objects // Measurement techniques. 2014. Vol. 57, N 6. P. 621—626. DOI: 10.1007/s11018-014-0508-y.
8. Распопов В. Я. Микромеханические приборы. М.: Машиностроение, 2007. 400 с.
400 с.
9. Белоус И. А., Емельянов В. А., Дрозд С. Е. и др. Схемотехническое конструирование БИС преобразователя емкость—напряжение для микромеханических датчиков // Нано- и микросистемная техника. 2008. № 8. С. 15—19.
10. Xie H. Gyroscope and micromirror design using vertical axis CMOS-MEMS actuation and sensing. Carnegie Mellon University, 2002. 246 p.
11. Некрасов Я. А, Беляева Т. А., Беляев Я. В., Багаева С. В. Электрические схемы емкостных датчиков микромеханического гироскопа RR-типа // Научное приборостроение. 2008. Т. 18, № 1. С. 91—97.
12. Люкшонков Р. Г., Моисеев Н. В. Дифференциальный емкостной датчик перемещений с дополнительной информацией о зазоре // Науч.-техн. вестн. СПбГУ ИТМО. 2011. № 4 (74). С. 67—72.
13. Arbuzov V. P. Time division of the channels of the measuring circuits of capacitive and inductive sensors // Measurement techniques. 2009. Vol. 52, N 5. P. 528—535. DOI: 10.1007/s11018-009-9294-3.
14. Arbuzov V. P., Mishina M. A. System of basis function of the functions for the measurement circuit of a sensor with temporally separated channels // Measurement techniques. 2012. Vol. 55, N 9. P. 978—983. DOI: 10.1007/s11018-012-0085-x.
Arbuzov V. P., Mishina M. A. System of basis function of the functions for the measurement circuit of a sensor with temporally separated channels // Measurement techniques. 2012. Vol. 55, N 9. P. 978—983. DOI: 10.1007/s11018-012-0085-x.
15. Arbuzov V. P., Larkin S. E., Mishina M. A. Phase separation of sensor measuring circuit channels // Measurement techniques. 2013. Vol. 55, N 11. P. 1247—1251. DOI: 10.1007/s11018-013-0115-3.
16. Arbuzov V. P., Mishina M. A. Phase division of the channels in capacitive sensor measuring circuits // Measurement Techniques. 2009. Vol. 52, N 9. P. 965—970. DOI: 10.1007/s11018-009-9377-1.
17. Люкшонков Р. Г. Термокомпенсация в микромеханических гироскопах с контуром стабилизации амплитуды первичных колебаний: Автореф. дис. канд. техн. наук. СПб, 2016.
ОШИБКА – 404 – НЕ НАЙДЕНА
- Главная
- Проблема?
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
SparkFun ESP32 Thing Motion Shield
Осталось всего 2! DEV-14430
$22,50 $12,38
1
Избранное Любимый 7
Список желаний
МИКРОЭ ЛР 5 Щелчок
Нет в наличии WRL-19246
52,95 $
Избранное Любимый 0
Список желаний
MIKROE Текущий лимит Нажмите
Нет в наличии ПРТ-19402
14,95 $
Избранное Любимый 0
Список желаний
Зарядное устройство MIKROE 2 Click
Нет в наличии ТОЛ-19977
16,95 $
Избранное Любимый 0
Список желаний
Хорошие вибрации (и конкурс)
6 мая 2021 г.
На прошлой неделе мы выпустили небольшой тактильный драйвер от Dialog Semiconductors. На этой неделе я покажу вам, как быстро и просто можно создать проект, который может сэкономить рабочие места.
Избранное Любимый 4
Поиск пропавших предметов с помощью GPS
24 августа 2021 г.
Первая часть серии о различных технологиях, которые можно использовать для поиска пропавших предметов – в данном случае потерянной фрисби.
Избранное Любимый 0
SparkFun gator:Руководство по подключению RTC
5 сентября 2019 г.
Gator:RTC — это часы реального времени (RTC) на основе I2C, которые отсчитывают время, пока ваш micro:bit не запитан. Это руководство поможет вам начать использовать gator:RTC с платформой micro:bit.
Избранное Любимый 1
ОШИБКА – 404 – НЕ НАЙДЕНА
- Главная
- ФНОРД
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
Микродатчик давления SparkFun — BMP581 (Qwiic)
В наличии СЕН-20171
20,95 $
Избранное Любимый 1
Список желаний
МИКРОЭ 8×8 Y Click
Нет в наличии COM-20460
14,95 $
Избранное Любимый 0
Список желаний
МИКРО BATT-MAN 3 Click
Нет в наличии ПРТ-20480
34,95 $
Избранное Любимый 0
Список желаний
МИКРОЭ Барометр 6 Click
Нет в наличии SEN-20494
11,95 $
Избранное Любимый 0
Список желаний
Тинси присоединяется к MicroMod!
2 июля 2021 г.
Процессор Teensy MicroMod теперь доступен вместе с новой версией нашей RedBoard и новым комплектом OpenLog Artemis!
Избранное Любимый 1
Простое кодирование для тех, кто не умеет кодировать
1 сентября 2021 г.
Сэкономьте время на своем следующем проекте, используя Flowcode для облегчения написания кода.
Избранное Любимый 0
Основы GPS
14 декабря 2012 г.
Глобальная система позиционирования (GPS) — это чудо инженерной мысли, к которому мы все имеем доступ по относительно низкой цене и без абонентской платы. С правильным оборудованием и минимальными усилиями вы можете определить свое местоположение и время практически в любой точке земного шара.
Избранное Любимый 31
Руководство по подключению кнопки SparkFun Qwiic
23 января 2020 г.