
Вертолет с гироскопом: достоинства и недостатки.
Где я сейчас:Главная/Статьи о радиомоделях/Вертолет с гироскопом: достоинства и недостатки
Радиоуправляемые модели вертолетов — одни из самых популярных, именно их чаще всего выбирают новички для первого знакомства с радиомоделям, они идеально подходят для подарка ребенку, а огромный выбор вертолетов на радиоуправлении позволяет подобрать оптимальный вариант для различных потребностей.
Но в описаниях часто встречается термин «гироскоп» и что он означает и зачем нужен знают далеко не все. На самом деле все несложно. Сейчас практически все радиоуправляемые модели вертолетов оснащаются гироскопом, но появились они совсем недавно — всего пару лет назад, гироскоп у вертолета на радиоуправлении был редкостью. Сейчас пометка Gyro присутствует практически на всех моделях радиоуправляемых вертолетов. На момент их внедрения было сложно понять, какое они дают преимущество, многие моделисты восприняли его, как обычный рекламный ход. Какие же преимущества дает наличие гироскопа у радиоуправляемого вертолета?
Какие же преимущества дает наличие гироскопа у радиоуправляемого вертолета?
Прообраз гироскопа был изобретен еще в XIX столетии Иоганном Бонебергом, хотя сложно считать физическое явление и примером этого может служить самая простая детская игрушка — юла, когда она раскручена, юла пребывает в вертикальном положении из-за действия центробежной силы, распределенной равномерно по всей плоскости игрушек.
На этом же принципе основан и гироскоп у вертолетов, он предназначен для обеспечения высокой степени устойчивости радиоуправляемого вертолета. Гироскоп помогает облегчить полет не только новичкам, но и профессиональным пилотам. Очень часто, загоревшись идеей моделизма и выбрав вертолет, начинающие сразу же бросали это занятие из-за сложностей управления и неустойчивостью модели в воздухе, заносами и, как следствие, частыми падениями и повреждениями вертолета. Вот в таких случаях наличие гироскопа у модели помогает избежать разочарования.
При сильном ветре, радиоуправляемый вертолет с гироскопом не раскручивается на месте, а передвигается по заданному направлению.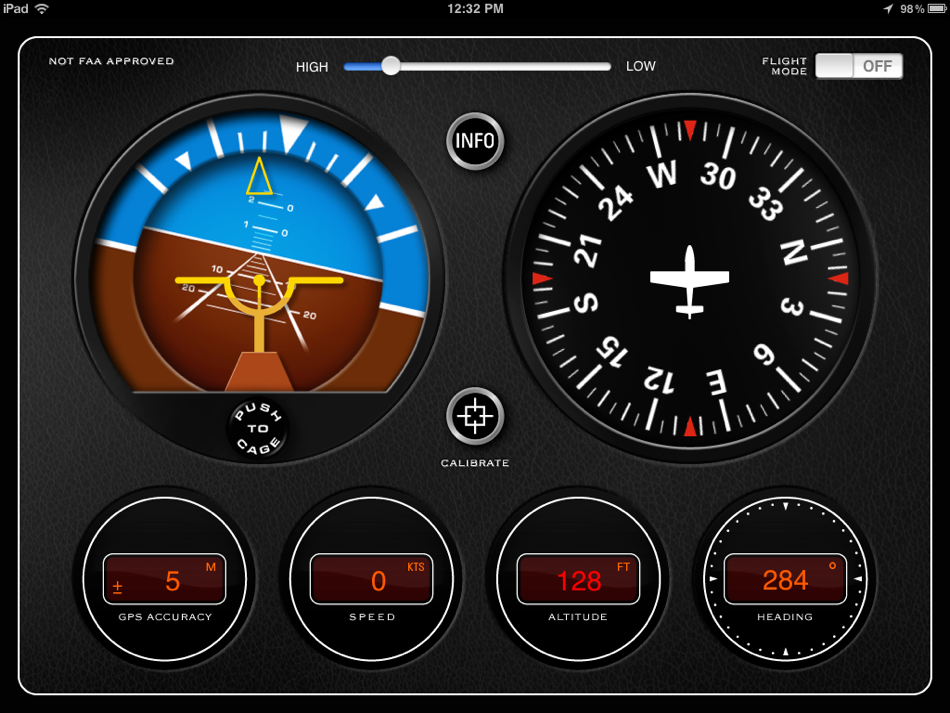 Полеты на таком вертолете превращаются в удовольствие без какого либо напряжения.
Полеты на таком вертолете превращаются в удовольствие без какого либо напряжения.
Конечно гироскопом оснащаются преимущественно вертолеты, ориентированные на новичков, но и многие профессиональные модели имеют этот ценный прибор, поскольку с гироскопом гораздо проще совершать трюки и принимать участия в соревнованиях.
Для новичков гироскоп — это практически необходимая вещь, тем более, что такие модели не существенно отличаются по стоимости.
Вертолеты на радиоуправлении, оснащенные гироскопом одинаково подходят начинающим моделистам, детям и опытным пилотам, они подходят для освоения различных трюков, вертолетных боев и совершенствования навыков 3D пилотирования.
Модели радиоуправляемых вертолетов с гироскопом представлены практически у всех производителей моделей этого типа. Можно купить недорогой RC вертолет просто для удовольствия, полетать дома или же профессиональную модель вертолета, которую можно смело запускать на улице. В любом случае, гироскоп будет существенным плюсом при выборе модели. А недостатки… гироскопы практически их лишены.
А недостатки… гироскопы практически их лишены.
Вернуться назад
Гироскопы на радиоуправляемых моделях
RC Design / Статьи / Аппаратура Радиоуправления
Авторы – Виталий Пузрин
- Назначение гироскопов и устройство датчиков поворота
- Типичные гироскопы и алгоритмы их работы
- Гироскопы со стандартным режимом работы
- Гироскопы с режимом удержания направления
- Специализированные самолетные гироскопы
- Заключение
Назначение гироскопов и устройство датчиков поворота
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, – там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, – там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также “крутых” современных гироскопах размешены в разных корпусах.
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо. Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.
Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Развитие современных технологий позволило разработать более совершенные датчики угловых скоростей. В результате появились пьезогироскопы, которые к настоящему времени полностью вытеснили механические. Конечно, они по-прежнему используют эффект кориолисова ускорения, но датчики являются твердотельными, то есть вращающиеся части отсутствуют. В наиболее распространенных датчиках используются вибрирующие пластины. Поворачиваясь вокруг оси, такая пластина начинает отклоняться в плоскости, поперечной плоскости вибрации. Это отклонение измеряется и поступает на выход датчика, откуда снимается уже внешней схемой для последующей обработки. Самыми известными производителями подобных датчиков являются фирмы Murata и Tokin.
Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.
У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т.
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой “AVCS”) уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур. Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.
Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.
Типичные гироскопы и алгоритмы их работы
 д.
д.Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
Гироскопы со стандартным режимом работы
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.
Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась.
Регулировка чувствительности реализуется несколькими способами:
- Дистанционная регулировка отсутствует. Чувствительность задается на земле (регулятором на корпусе гироскопа) и не меняется во время полета.
- Дискретная регулировка (dual rates gyro). На земле задается два значения чувствительности гироскопа (двумя регуляторами). В воздухе можно выбирать нужное значение чувствительности по каналу регулирования.
- Плавная регулировка. Гироскоп выставляет чувствительность пропорционально сигналу в регулирующем канале.
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только “стандартный” режим работы, то можно отметить, что:
- Такие гироскопы имеют довольно низкую цену (вследствие простоты реализации)
- При установке на хвостовую балку вертолета, новичкам проще выполнять полеты по кругу, так как за балкой можно особенно не следить (балка сама разворачивается по ходу движения вертолета).
Недостатки:
- В недорогих гироскопах термокомпенсация сделана недостаточно хорошо. Необходимо вручную выставлять “ноль”, который может сместиться при изменении температуры воздуха.

- Приходится применять дополнительные меры по устранению эффекта подавления гироскопом управляющего сигнала (дополнительное микширование в канале управления чувствительности или увеличение расхода рулевой машинки).

Вот довольно известные примеры описанного типа гироскопов:
При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Гироскопы с режимом удержания направления
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки “3D”, “AVSC” (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
- на вертолете начинающий пилот в режиме висения может практически не управлять хвостовым винтом
- отпадает необходимость в микшировании шага хвостового винта с газом, что несколько упрощает предполетную подготовку
- триммирование хвостового винта можно производить без отрыва модели от земли
- становится возможным выполнение таких маневров, которые раньше были затруднены (например, полет хвостом вперед).

Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде “Torque Roll”.
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:
Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым “цифровым” машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Специализированные самолетные гироскопы
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.
При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов. Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен – при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 “Беркут” С-37 показывал фигуру “харриер”. Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет “несваливаемым на крыло”. Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И. В.Остославского “Аэродинамика самолета”.
В.Остославского “Аэродинамика самолета”.
Заключение
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, – по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форумеГироскопическая прецессия, ротор вертолета как гироскоп
Гироскопическая прецессия и ротор как гироскоп
Вы когда-нибудь держали в руках гироскоп и играли с ним? Если нет, возможно, вам следует, это может помочь вашему пониманию этой темы. Гироскоп сопротивляется движению независимо от направления, в котором он применяется. Когда это явление применяется к вертолетам, единственное, что обычно преподается или упоминается, – это вопросы гироскопической прецессии и управляющей оснастки, когда она намного глубже. Принципы гироскопа гораздо важнее и значительнее, чем думает большинство пилотов. Лучшее понимание действия несущего винта как гироскопа и последующей реакции на управляющие воздействия поможет вам понять, через что вам предстоит пройти, обучаясь управлять вертолетом. (На фото слева я сделал этот гироскоп, чтобы продемонстрировать эффект сопротивления ротора управляющим воздействиям, моделируемый наклоном вала, на котором закреплен вращающийся диск.)
Гироскоп сопротивляется движению независимо от направления, в котором он применяется. Когда это явление применяется к вертолетам, единственное, что обычно преподается или упоминается, – это вопросы гироскопической прецессии и управляющей оснастки, когда она намного глубже. Принципы гироскопа гораздо важнее и значительнее, чем думает большинство пилотов. Лучшее понимание действия несущего винта как гироскопа и последующей реакции на управляющие воздействия поможет вам понять, через что вам предстоит пройти, обучаясь управлять вертолетом. (На фото слева я сделал этот гироскоп, чтобы продемонстрировать эффект сопротивления ротора управляющим воздействиям, моделируемый наклоном вала, на котором закреплен вращающийся диск.)
Гироскопическая прецессия сама по себе довольно проста; это простой факт, что когда внешняя сила приложена к вращающемуся телу, результат действия внешней силы произойдет примерно на 90 градусов позже в плоскости вращения. Это не точно на 90 градусов позже, но это достаточно близко для того, что нас интересует. Это можно продемонстрировать, изготовив простое устройство, такое как вращение фанерного диска на остроконечном гвозде или аналогичной опоре 9.0005 (пример на фото слева) . Когда диск вращается, слегка надавите пальцем на любую точку диска; диск наклонится вперед примерно на 90 градусов позже в направлении вращения.
Это можно продемонстрировать, изготовив простое устройство, такое как вращение фанерного диска на остроконечном гвозде или аналогичной опоре 9.0005 (пример на фото слева) . Когда диск вращается, слегка надавите пальцем на любую точку диска; диск наклонится вперед примерно на 90 градусов позже в направлении вращения.
В вертолетах органы управления настроены таким образом, что при циклическом движении вперед вертолет движется вперед, а также назад и т. д. Для этого рупор тангажа смещен на 90º к лопасти несущего винта. Элементы управления по-прежнему наклоняют шайбу автомата перекоса в том же направлении, что и управляющий сигнал, но из-за расположения рупорного рупорного руля происходит вход в лопасть 9на 0° раньше в плоскости вращения.
Чтобы увидеть рулевое управление, поверните несущий винт так, чтобы одна лопасть находилась слева от кабины, и циклически введите вперед. Обратите внимание, что автомат перекоса наклоняется вперед, но тяга управления находится над задней частью автомата перекоса, увеличивая угол атаки левой лопасти. Когда несущий винт находится в движении, реакция на это увеличение угла атаки с левой стороны приведет к подъему лопасти, которая достигнет максимального отклонения вверх, когда лопасть находится в кормовом положении, в то время как лопасть с правой стороны будет достичь минимального отклонения в переднем положении.
Когда несущий винт находится в движении, реакция на это увеличение угла атаки с левой стороны приведет к подъему лопасти, которая достигнет максимального отклонения вверх, когда лопасть находится в кормовом положении, в то время как лопасть с правой стороны будет достичь минимального отклонения в переднем положении.
Неужели это было достаточно просто понять, не так ли? Что касается гироскопической прецессии, то это все, что нас интересует; способ управления вертолетом, чтобы компенсировать это. А вот с несущим винтом все немного сложнее. Время от времени я получаю аргументы по этому поводу, но это не меняет того факта, что главный ротор при вращении функционирует как гироскоп. Суть гироскопа – это вращающееся колесо (несущий винт) на оси (мачте). У вас есть это, и да, это работает таким образом.
Ротор вертолета как гироскоп: Ух ты, интересная мысль, не правда ли? Ротор (основной или хвостовой) представляет собой вращающийся диск и, следовательно, представляет собой гироскоп. Хотя когда-то в движении у нас есть гироскопы, но лопасти остаются аэродинамически лопастями. Хвостовой винт как гироскоп довольно незначителен, поэтому я не буду обсуждать его дальше в этой статье, однако несущий винт — это отдельная история.
Хотя когда-то в движении у нас есть гироскопы, но лопасти остаются аэродинамически лопастями. Хвостовой винт как гироскоп довольно незначителен, поэтому я не буду обсуждать его дальше в этой статье, однако несущий винт — это отдельная история.
Во-первых, давайте вспомним, что гироскоп будет сопротивляться реакции на внешние силы. Гироскоп предпочитает оставаться в движении как бы , несмотря на то, что мы сделали контрольный ввод. В результате действие, намеченное пилотом вертолета посредством управляющих воздействий, не будет таким простым или абсолютным, как он думал. Это особенно расстраивает нового ученика, изучающего вертолет, поскольку реакция вертолета на управляющие воздействия не совсем такая, как ожидал ученик; это может расстраивать, но мы собираемся это исправить.
Имейте в виду, что любые изменить на любое положение управления повлияет на диск ротора с осложнениями гироскопического сопротивления. Это означает, что если пилот совершает либо коллективное, либо циклическое движение, вертолет будет реагировать эффектами и/или тенденциями гироскопического сопротивления. Одни лишь педали не оказывают никакого гироскопического воздействия на несущий винт; однако достаточно интересно, что не существует такой вещи, как педальные входы. Если вы нажимаете на педаль, это напрямую влияет на крутящий момент, и, следовательно, должны быть сделаны другие управляющие воздействия, которые до имеют осложнения гироскопического сопротивления. Обратите внимание, что увеличение шага рулевого винта требует увеличения мощности (коллективной), а уменьшение шага хвостового винта требует уменьшения мощности.
Одни лишь педали не оказывают никакого гироскопического воздействия на несущий винт; однако достаточно интересно, что не существует такой вещи, как педальные входы. Если вы нажимаете на педаль, это напрямую влияет на крутящий момент, и, следовательно, должны быть сделаны другие управляющие воздействия, которые до имеют осложнения гироскопического сопротивления. Обратите внимание, что увеличение шага рулевого винта требует увеличения мощности (коллективной), а уменьшение шага хвостового винта требует уменьшения мощности.
Когда циклический плавно перемещается вперед, чтобы начать отход от зависания, эффект гироскопического сопротивления малозаметен, но поскольку циклический двигатель вводится дальше вперед, чтобы противодействовать тенденциям набора высоты эффективной поступательной подъемной силы, вертолет слегка кренится влево, и пилот должен ввести небольшой циклический правый ход, чтобы преодолеть этот левый крен. Большинство заметят это, так как вертолет летит слева от взлетно-посадочной полосы, а не по центральной линии. Пилоты-студенты просто позволяют этому происходить, поскольку они позволяют вертолету летать над ними, а не вносят поправку для отслеживания центральной линии.
Пилоты-студенты просто позволяют этому происходить, поскольку они позволяют вертолету летать над ними, а не вносят поправку для отслеживания центральной линии.
Что еще более важно, во время окончательного захода на посадку, когда выполняется циклический вход для замедления назад, вертолет будет дрейфовать вправо, если для противодействия сносу не будет сделан значительный циклический вход влево. Этот правый дрейф усложняется еще больше, так как коллектив более агрессивно увеличивается внизу, чтобы прекратить приближение к парению, и, кроме того, необходимо сделать большой вход в левую педаль, чтобы противодействовать увеличению крутящего момента и, как результат, перевод тенденция тоже очень мощный. Помните, что при заходе на посадку давление на правую педаль было увеличено, чтобы компенсировать уменьшение крутящего момента, поскольку коллективное движение снижалось при спуске.
Склонность к дрейфу, описанная в предыдущих параграфах, является прямым результатом гироскопического сопротивления. Это легко понять, так как циклические силы напрямую воздействуют на ротор (гироскоп). Подумайте об этом, когда вы перемещаете циклический вперед, такелаж заставляет ротор наклоняться вперед, но эффект следования, вызванный гироскопическим сопротивлением, вызывает тенденцию к левому крену. И так же вправо при выполнении циклических входов сзади.
Это легко понять, так как циклические силы напрямую воздействуют на ротор (гироскоп). Подумайте об этом, когда вы перемещаете циклический вперед, такелаж заставляет ротор наклоняться вперед, но эффект следования, вызванный гироскопическим сопротивлением, вызывает тенденцию к левому крену. И так же вправо при выполнении циклических входов сзади.
Гироскопическое воздействие также действует на вертолет при входе в поворот из горизонтального полета в любом направлении (влево или вправо). Когда вертолет поворачивается вправо, диск наклоняется вправо из-за циклического такелажа, но диск будет иметь дальнейшую тенденцию к наклону вперед, и носовая часть вертолета будет опускаться, и, если пилот не исправит это немедленно, увеличение по воздушной скорости также будет иметь место. При повороте налево диск будет иметь дальнейшую тенденцию к наклону назад, нос будет подниматься вверх, а скорость полета будет снижаться. Вот почему все учащиеся замечают увеличение скорости полета при крене вправо и уменьшение скорости при крене влево.
Интересно, что коллективные входы также реагируют на гироскопическое воздействие. Эффекты гироскопического сопротивления от коллективных воздействий можно продемонстрировать на горизонтальном полете; по мере снижения коллектива угол атаки уменьшается на всех лопастях вместе (одновременно), и вертолет будет крениться влево. Помните, что диск уже наклонен вперед из-за циклического входа для полета вперед, и это имеет тенденцию следовать в направлении вращения ротора, когда коллектив уменьшается, что приводит к тенденции левого поворота.
Влияние коллективных воздействий на несущий винт также очень заметно при прекращении захода на висение при агрессивном крене вертолета вправо. Правый крен вызван тем, что диск ротора наклонен назад, но в большей степени агрессивным подъемом коллектива, заканчивающимся зависанием, и эффектом гироскопа. Существует вторичный аффект, который также является результатом Транслирующей Тенденции на этой фазе подхода. Это связано с тем, что по мере того, как коллектив более агрессивно увеличивается для окончания, левая педаль также применяется довольно агрессивно.
Составные управляющие входы: В конце концов, те студенты, которым не рассказывали о гироскопическом воздействии на ротор и последующей реакции вертолета на управляющие воздействия, просто научатся преодолевать эти тенденции на собственном опыте, даже не зная, что происходит. Если учащегося с самого начала учат, что поворот влево или вправо требует сложного ввода (влево с легким движением вперед или вправо с небольшим движением назад), возможно, им не придется так усердно работать, чтобы попытаться понять, почему вертолет реагирует на поворот. так оно и есть. Что мало понятно, так это тот факт, что, хотя несущий винт вертолета настроен таким образом, что органы управления работают должным образом, все же существуют гироскопические эффекты, которые пилота нужно либо научить преодолевать, либо ему / ей придется просто научиться без знаний и, следовательно, не смогут передать эти знания ученикам, которых они могут обучать в будущем.
Когда учащийся начинает управлять вертолетом, конечной целью является то, чтобы учащийся научился очень рано определять, что вертолет собирается делать дальше, и исправлять это до того, как это произойдет. Это само по себе является серьезной проблемой. Учащийся также должен изучить все требования, предъявляемые к составным элементам управления. При полете на вертолете очень редко бывает, что требуется только ввод одного элемента управления, поскольку ввод любого отдельного элемента управления, безусловно, окажет некоторое влияние на все остальные.
Это само по себе является серьезной проблемой. Учащийся также должен изучить все требования, предъявляемые к составным элементам управления. При полете на вертолете очень редко бывает, что требуется только ввод одного элемента управления, поскольку ввод любого отдельного элемента управления, безусловно, окажет некоторое влияние на все остальные.
Полет на диске
Пилоты вертолетов должны понимать, что ротор вертолета представляет собой диск, когда он вращается; хотя аэродинамически это лопасти. Должно быть очевидно, что воздействие ветра на эти диски будет подобно тому, как если бы вы несли большой плоский предмет по ветру. Если бы вы несли этот предмет над головой и позволили ветру проникнуть под него, ветер наклонил бы его в этом направлении, поэтому вы должны наклонить этот предмет по ветру, чтобы он не уносил вас; циклические воздействия на несущий винт на вертолете такие же. Вы должны держать цикл по ветру, чтобы вертолет не дрейфовал по ветру. Если бы вы несли этот предмет (например, большой кусок фанеры) вертикально, ветер сдул бы вас вбок. Как пилот, вы действительно мало что можете сделать с влиянием ветра на хвостовой винт, кроме как понимать, что это одна из наиболее важных причин склонности вертолета к «флюгеру», и что ваша нагрузка на педали будет значительно увеличена. в результате увеличилось.
Если бы вы несли этот предмет (например, большой кусок фанеры) вертикально, ветер сдул бы вас вбок. Как пилот, вы действительно мало что можете сделать с влиянием ветра на хвостовой винт, кроме как понимать, что это одна из наиболее важных причин склонности вертолета к «флюгеру», и что ваша нагрузка на педали будет значительно увеличена. в результате увеличилось.
Органы управления
Коллектив увеличивает шаг или угол атаки всех лопастей несущего винта одинаково и одновременно независимо от положения лопастей в плоскости вращения (совокупно). Это воздействие на лопасти несущего винта обеспечивает тягу. Изменение этой тяги можно использовать для потери или увеличения воздушной скорости, для потери или набора высоты или для любой комбинации воздушной скорости и высоты.
Циклический изменяет шаг данной лопасти несущего винта в его цикле вращения. Если циклично перемещать вперед, шаг лопасти слева от фюзеляжа увеличивается, а шаг лопасти справа от фюзеляжа уменьшается. Из-за гироскопической прецессии это действие вступает в силу 90 градусов позже, и диск наклоняется вперед. Этот наклон несущего винта управляет направлением тяги несущего винта.
Из-за гироскопической прецессии это действие вступает в силу 90 градусов позже, и диск наклоняется вперед. Этот наклон несущего винта управляет направлением тяги несущего винта.
Педали управляют лопастями хвостового винта так же, как коллектив управляет лопастями несущего винта, но вместо вертикального вектора подъемной силы хвостовой винт обеспечивает горизонтальную тягу, но только вправо (нос влево). Хвостовой винт противодействует крутящему моменту фюзеляжа, создаваемому двигателем, приводящим в движение несущий винт. Обратите внимание, что у хвостового винта может быть некоторая правильная тяга, но это только для управления направлением на авторотации и не будет использоваться в полете с двигателем. По сути, хвостовой винт толкает нос влево, но мы только ослабляем давление на левую педаль и позволяем вертолету вращаться (носом) вправо. Фактически, если пилот привязывал свою (левую) ногу к левой педали, он мог летать, только нажимая и поднимая левую ногу.
При выполнении циклического ввода будет задержка, прежде чем вертолет отреагирует на этот ввод. Временная задержка – это факт жизни, с которым должны научиться справляться все пилоты, но она связана с маятниковым движением фюзеляжа, висящего на диске. Научиться предвидеть то, что должно произойти, и заблаговременно отреагировать с помощью надлежащих управляющих входных данных — непростая задача. Это одна из причин дальнего фокуса; вы можете ощутить движение вертолета гораздо быстрее, если сосредоточитесь на отдаленном горизонте, используя свое периферийное зрение вокруг вертолета. Вы можете видеть, как дверная рама поднимается или опускается сбоку, а движения вперед и назад можно определить по движениям приборной панели относительно горизонта или, возможно, по компасу, это положение самолета относительно горизонта, т. е. отношение полета.
Временная задержка – это факт жизни, с которым должны научиться справляться все пилоты, но она связана с маятниковым движением фюзеляжа, висящего на диске. Научиться предвидеть то, что должно произойти, и заблаговременно отреагировать с помощью надлежащих управляющих входных данных — непростая задача. Это одна из причин дальнего фокуса; вы можете ощутить движение вертолета гораздо быстрее, если сосредоточитесь на отдаленном горизонте, используя свое периферийное зрение вокруг вертолета. Вы можете видеть, как дверная рама поднимается или опускается сбоку, а движения вперед и назад можно определить по движениям приборной панели относительно горизонта или, возможно, по компасу, это положение самолета относительно горизонта, т. е. отношение полета.
Когда вы берёте свои первые уроки полёта на вертолёте, может помочь сделать пару отметок на лобовом стекле кусочком скотча, не используйте сухостираемый маркер, так как они могут испачкать лобовое стекло. Хотя в большинстве случаев я не одобряю этого, у меня были студенты, которым это помогло. Не должно быть необходимости в более чем 2-х отметках, возможно, одна для положения в режиме зависания и одна для положения с ускорением при взлете. К этим отметкам можно сделать и другие ссылки на отношения. Например, крейсерское положение может быть на 1 или 2 дюйма выше или ниже одной из меток. Вы не должны смотреть на эти знаки, а смотреть сквозь них на далекий горизонт. По прошествии некоторого времени эти отметки должны быть удалены, чтобы ученик научился летать без этого недостатка.
Не должно быть необходимости в более чем 2-х отметках, возможно, одна для положения в режиме зависания и одна для положения с ускорением при взлете. К этим отметкам можно сделать и другие ссылки на отношения. Например, крейсерское положение может быть на 1 или 2 дюйма выше или ниже одной из меток. Вы не должны смотреть на эти знаки, а смотреть сквозь них на далекий горизонт. По прошествии некоторого времени эти отметки должны быть удалены, чтобы ученик научился летать без этого недостатка.
Когда вы летаете на диске , вы делаете управляющий ввод и затем ждете реакции (но только доли секунды), если она была слишком большой, то подстраивайте соответственно; если было мало, то сделай еще немного. Эти входы должны быть небольшими, и как только ввод сделан, вы должны удерживать его и ждать, пока вертолет отреагирует. На самом деле после того, как ввод сделан, проходит лишь доля секунды, но этого времени достаточно, чтобы учащиеся подумали, что их ввод был неэффективным, а затем добавили еще. Как раз в тот момент, когда они добавляют больше, вертолет реагирует на первый ввод, который к настоящему времени является чрезмерным, и необходимо сделать встречный ввод. Теперь началась циклическая погоня, и она разгоняется до тех пор, пока вертолет не начнет бешено раскачиваться, как мячик на веревке, и инструктор должен взять на себя управление и вернуть вертолет в устойчивое зависание, а затем снова отдать его ученику для еще одной попытки.
Как раз в тот момент, когда они добавляют больше, вертолет реагирует на первый ввод, который к настоящему времени является чрезмерным, и необходимо сделать встречный ввод. Теперь началась циклическая погоня, и она разгоняется до тех пор, пока вертолет не начнет бешено раскачиваться, как мячик на веревке, и инструктор должен взять на себя управление и вернуть вертолет в устойчивое зависание, а затем снова отдать его ученику для еще одной попытки.
Пока вы учитесь летать и на протяжении всей своей карьеры, просто помните, что роторы становятся дисками, когда они вращаются. Предугадывайте действие ветра на эти диски и научитесь опережать самолет. Вертолет будет делать только то, что вы ему позволите, или то, что вы скажете ему через управляющие входы, но он всегда будет следовать за диском.
Эффект маховика
Некоторое время назад я вместе с друзьями работал в сельском хозяйстве. Всего мы летели 9вертолеты утром в день моего приезда, а к вечеру только 8. К сожалению, один мой очень хороший друг днем перевернулся в ирригационную канаву; вертолет был полной потерей, но от этого испытания он только ободрал костяшки пальцев. Он сделал очень простой
ошибка, повлекшая за собой аварию. На самом деле, как и во всех несчастных случаях, он совершил ряд ошибок, кульминацией которых стала авария. Но это была его первая работа в сельском хозяйстве, и в лучшем случае у него была минимальная подготовка.
К сожалению, один мой очень хороший друг днем перевернулся в ирригационную канаву; вертолет был полной потерей, но от этого испытания он только ободрал костяшки пальцев. Он сделал очень простой
ошибка, повлекшая за собой аварию. На самом деле, как и во всех несчастных случаях, он совершил ряд ошибок, кульминацией которых стала авария. Но это была его первая работа в сельском хозяйстве, и в лучшем случае у него была минимальная подготовка.
Серия его ошибок началась с правого поворота по ветру с недостаточной высотой для восстановления. Что ж, многие скажут, что правый поворот требует меньше энергии, так что это должно было сработать. Однако дело в том, что для остановки поворота требуется гораздо более агрессивное нажатие педали, чем для его выполнения, поэтому, как и в случае с моим другом, когда он вошел с этой сильной левой педалью, главная Скорость вращения ротора упала, и он, конечно же, потерял подъемную силу без необходимой ему высотной подушки.
Как начал тонуть, так и коллектив начал доить. Он довольно сильно ударился о землю при движении вперед и соскользнул с
грунтовая дорога в арык. Я всегда утверждал, что подоить коллектив не получится. Я столкнулся с некоторым аргументом в этом отношении, но я говорю неоправданным. Просто посчитайте, это не может работать лучше или быстрее, чем простое сокращение коллектива. Помните, “если не дает молока, не доите его”, и “доить коллектив равносильно протоколу о несчастном случае”.
Он довольно сильно ударился о землю при движении вперед и соскользнул с
грунтовая дорога в арык. Я всегда утверждал, что подоить коллектив не получится. Я столкнулся с некоторым аргументом в этом отношении, но я говорю неоправданным. Просто посчитайте, это не может работать лучше или быстрее, чем простое сокращение коллектива. Помните, “если не дает молока, не доите его”, и “доить коллектив равносильно протоколу о несчастном случае”.
Было несколько вещей, которые он мог бы сделать, если бы знал, что это произойдет. Он был в поршневом самолете, поэтому он
можно было бы включить дроссельную заслонку непосредственно перед нажатием на левую педаль, что устранило бы падение оборотов (это даже очень эффективно для Робинзонов, у которых есть отличный регулятор, но которые не могут справиться с агрессивным нажатием педали в ситуации с высокой мощностью ). Он мог бы подняться немного выше в повороте, что дало бы ему большую высоту, чтобы совершить прыжок на малой мощности обратно в поле. Он мог бы сдерживать коллектив, сохраняя горизонтальный полет, и просто позволить самолету медленно оседать в поле, пока он набирает обороты несущего винта.
Он мог бы сдерживать коллектив, сохраняя горизонтальный полет, и просто позволить самолету медленно оседать в поле, пока он набирает обороты несущего винта.
Почему это происходит? Никогда не забывайте об эффекте маховика! Верно для всех вертолетов, но особенно если вы летите на поршне.
вертолет с двигателем. Резкое нажатие левой педали будет получать мощность от несущего винта, в котором хранится огромное количество энергии. Вы можете безопасно поэкспериментировать с этим в зависании, но не будьте слишком агрессивны. Обратите внимание, что при фиксированной общей настройке против ветра и в условиях штиля, когда вы нажимаете левую педаль, вертолет оседает. При нажатии правой педали
вертолет поднимется. В Робинсоне с включенным регулятором вы заметите задержку в применении регулятора и соответствующее падение или увеличение оборотов несущего винта. Не проявляйте агрессии в этой практике, но немного поиграйте с ней. Вы можете легко понять, почему вам может понадобиться опережать дроссельную заслонку, даже несмотря на то, что у Робинсона есть очень хороший регулятор. Проблемы с дроссельной заслонкой не являются относительными в турбинах, поскольку дроссельная заслонка всегда полностью открыта. У вас все еще может быть падение оборотов несущего винта, вы просто должны знать об этом и летать соответственно, в турбинных вертолетах необходимо снизить коллектив, чтобы исправить эту ситуацию.
Проблемы с дроссельной заслонкой не являются относительными в турбинах, поскольку дроссельная заслонка всегда полностью открыта. У вас все еще может быть падение оборотов несущего винта, вы просто должны знать об этом и летать соответственно, в турбинных вертолетах необходимо снизить коллектив, чтобы исправить эту ситуацию.
Низкие обороты ротора
Низкие обороты ротора — опасная ситуация, которая может быстро превратиться в аварийную, если ее вовремя не обнаружить и не исправить. Вы должны знать и помнить, что на каждый процент потерянных оборотов ротора вы также теряете такое же количество энергии, доступное для восстановления этих потерянных оборотов. Это означает, что если вы потеряете 3% оборотов ротора, вы также потеряете 3% мощности, доступной для восстановления. Вы также должны знать и помнить, что на каждый 1% потерянных оборотов несущего винта вы также теряете 5-7% доступной тяги хвостового винта, что может легко привести к событию LTE.
Число оборотов ротора напрямую регулируется дроссельной заслонкой при наличии мощности двигателя. Когда мощность двигателя недоступна, число оборотов может регулироваться коллективно через дисковую загрузку и/или циклически через дисковую G-нагрузку.
В случае отказа двигателя обороты ротора могут регулироваться только коллективным и/или циклическим. Коллектив должен быть сокращен до точки, необходимой для достижения частоты вращения несущего винта в допустимом диапазоне, указанном в руководстве по летной эксплуатации конкретного самолета. Если существует условие, при котором полное опускание все еще не обеспечивает удовлетворительных оборотов ротора, можно увеличить число оборотов за счет увеличения перегрузки на диске ротора путем выполнения S-образных поворотов или спуска по спирали.
Если происходит потеря числа оборотов ротора при наличии мощности двигателя, корректирующее действие будет заключаться в снижении общего числа оборотов при одновременном
применение дроссельной заслонки по мере необходимости для восстановления оборотов. В случае достижения полного газа единственным средством увеличения оборотов ротора будет уменьшение общего шага. В тех случаях, когда мощность двигателя достигла своего максимума, может возникнуть необходимость управления оборотами с помощью коллектива даже в полете с двигателем. Этот метод распространен на большой высоте, когда двигатель достигает максимальной выходной мощности (полный газ).
В случае достижения полного газа единственным средством увеличения оборотов ротора будет уменьшение общего шага. В тех случаях, когда мощность двигателя достигла своего максимума, может возникнуть необходимость управления оборотами с помощью коллектива даже в полете с двигателем. Этот метод распространен на большой высоте, когда двигатель достигает максимальной выходной мощности (полный газ).
Если во время висения происходит потеря оборотов несущего винта, правильным корректирующим действием будет простая посадка вертолета; позволяет местность. Никогда не поднимайте коллектив, чтобы поддерживать высоту висения, пытаясь восстановить обороты ротора в висении (если только вы не над минным полем, тогда вы можете попробовать творческий подход). При движении по пересеченной местности можно восстановить обороты, коснувшись любой части шасси вертолета, что приведет к некоторой разгрузке. В таком случае необходимо раннее распознавание, чтобы предотвратить катастрофу, дождавшись, пока состояние станет экстремальным и будет невозможно сбалансировать вертолет на одном заносе, пока обороты восстанавливаются.
Лучше всего распознать состояние низких оборотов, заметив изменение тона ротора и/или шума двигателя; и во вторую очередь любым соответствующие сигнальные лампы или звуковые сигналы.
Избегание требует тщательного контроля за частотой вращения, чтобы она постоянно поддерживалась в допустимом диапазоне, а также осознания того, что вы летите в условиях, способствующих ограниченной мощности двигателя. КОНЕЦ Перейти к началу
Вертолет– Как вертолеты меняют положение (гироскопическая прецессия или наклон вектора тяги)
Эта анимация показывает это лучше, чем большинство других. Автомат перекоса изменяет плоскость диска несущего винта, чтобы изменить плоскость вектора подъемной силы. Это то же самое, что и самолет, поворачивающий по крену. Когда самолет кренится, он передает составляющую поперечной тяги компоненту вертикальной подъемной силы, и он движется вбок, а поскольку при этом он движется вперед, он движется по горизонтальной дуге или развороту. Несущий винт вертолета просто способен «кренить» во всех направлениях на любой скорости.
Несущий винт вертолета просто способен «кренить» во всех направлениях на любой скорости.
Автомат перекоса направляет лопасти непосредственно на траекторию, которая помещает весь диск в желаемую плоскость вращения. Лопасти должны лететь на свое место с помощью воздуха; если бы машина работала в вакууме, цикл не имел бы никакого эффекта. Однако прецессия гироскопа является фактором, поскольку вход/результат воздействия автомата перекоса на физический путь лопасти смещен 90 градусов.
То есть, чтобы острие лопасти достигло наивысшей точки в окружности, максимальный угол лопасти или наибольшая подъемная сила в цикле вращения передается за 90 градусов до этой точки. Чтобы наклонить диск несущего винта вперед, скажем, лопасть, которая находится на пути к своей высокой точке над хвостовой балкой, достигнет максимального угла лопасти, проходя под углом 90 градусов влево.
На роторе Bell в анимации это хорошо видно. Угол диска несущего винта следует за углом наклонной шайбы – наклоняемая шайба наклоняется вперед, несущий винт наклоняется вперед. Однако рычажный механизм, приводимый в движение наклонной шайбой, действует на угол лопасти с углом 9Смещение на 0 градусов (тяги управления поднимаются с каждой стороны ступицы) для учета прецессии.
Однако рычажный механизм, приводимый в движение наклонной шайбой, действует на угол лопасти с углом 9Смещение на 0 градусов (тяги управления поднимаются с каждой стороны ступицы) для учета прецессии.
Система качания Bell интересна тем, что она не создает никаких изгибающих усилий на мачту ротора. Корпус машины подвешен под втулкой ротора, как если бы это был теннисный мяч на веревке. Когда вы двигаете палкой, вы заставляете диск ротора летать сам по себе, наклоняясь туда-сюда, и машина, подвешенная под ним, следует за ним. На самом деле, если к мачте БЫЛ приложен изгибающий момент из-за того, что качающиеся ограничители касаются мачты во время ее вращения, она разваливается, и вы становитесь падающим объектом (это «удар мачты», который приводит к гибели нескольких пилотов Хьюи). в 60-х и пилотов Робинзонов в 9-х0с).
Жесткие и шарнирно-сочлененные несущие системы передают некоторые моменты качения и тангажа воздушной раме, а головка несущего винта, мачта и система подвески трансмиссии предназначены для передачи этих нагрузок.