
Назначение гироскопических датчиков и системы их использования в современных навигационных системах / Хабр
Эффективность и конкурентоспособность современных летательных аппаратов (ЛА) во многом определяется совершенством гироскопических датчиков первичной информации, на базе которых строятся навигационные системы и системы управления ЛА.
В настоящее время существует большое многообразие различных типов гироскопических датчиков, правильное применение которых обеспечивает необходимые эксплуатационные качества ЛА.
Каждому типу гироскопических датчиков можно найти оптимальную нишу применения. При выборе гироскопического датчика учитываются следующие его основные характеристики: точность, надежность работы, энергопотребление, габаритные размеры и стоимость. В зависимости от требований, предъявляемых к системам управления и навигационным системам, выбирается соответствующий тип гироскопического датчика.
Тем не менее, из всего многообразия датчиков можно выделить наиболее перспективные по указанным выше характеристикам.
Основным их преимуществом является повышенная надежность работы из-за отсутствия быстро вращающихся роторов и карданных подвесов, минимальное потребление электроэнергии за счет реализации основных функциональных узлов на базе сервисной микроэлектроники и возможность повышения точностных характеристик путем математической обработки первичных сигналов датчиков в микропроцессорах.
Гироскопические датчики являются источниками первичной информации при построении пилотажных и навигационных систем летательных аппаратов.
В пилотажных системах они используются в основном в качестве датчиков угловых скоростей в цепях обратной связи автоматических систем управления. В навигационных системах — в качестве датчиков углового положения самолета или индикатора нулевого положения гиростабилизированной платформы. В качестве датчиков линейных ускорений используются акселерометры.
Рассмотрим некоторые схемы построения инерциальных навигационных систем на базе гироскопических датчиков. Основными задачами любой навигационной системы является определение местоположения летательного аппарата в географических координатах – долготы (λ) и широты (φ) местонахождения, скорости (υ) и высоты (h) полета, углового положения относительно своего центра тяжести в инерциальном пространстве – курса (ψ), тангажа (ϑ), крена (γ). На рис.1.1 и рис.1.2 показаны эти параметры, принятые в авиации.
Рис. 1.1 Углы ориентации самолета
Рис.1.2 Системы координат, в которых определяется положение летательного аппарата
На рисунках 1.1, 1.2: – географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток. – базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности.
Инерциальные навигационные системы подразделяются на две большие группы – платформенные и бесплатформенные.
Независимо от типа навигационной системы информация о скорости полета летательного аппарата и пройденном пути находится из показаний акселерометров путем интегрирования их выходных сигналов – линейных ускорений . Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
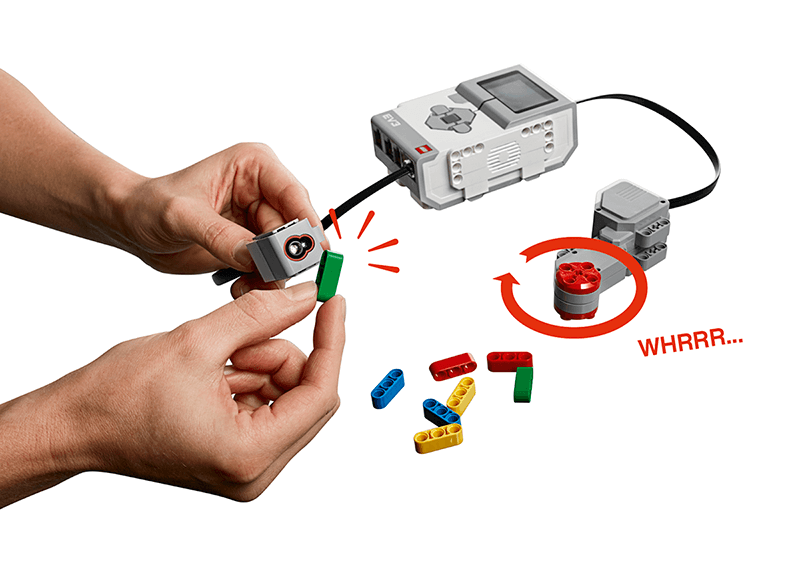
Рис.1.3 Схема построения платформенной навигационной системы
Гироскопы устанавливаются на той же платформе, что и акселерометры (рис.1.3). Чем выше точность гироскопов, тем с меньшей погрешностью осуществляется стабилизация положения платформы, тем точнее определяются скорость и местоположение летательного аппарата.
Информация об угловом положении центра тяжести летательного аппарата снимается с трех датчиков угла , установленных по осям рам карданова подвеса.
 При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла , установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла , установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.Из представленной схемы видны основные недостатки платформенных инерциальных систем – большое количество механических вращающихся элементов, наличие аналоговых систем регулирования и, как следствие, невысокая надежность работы системы.
Появление и развитие гироскопических датчиков на новых физических принципах — ЛГ, ВОГ, ВТГ, ММГ, в которых отсутствуют быстро вращающиеся механические ротора, позволило перейти к созданию инерциальных навигационных систем повышенной надежности – бесплатформенных инерциальных навигационных систем (БИНС).
 1.2), относительно которого определяется положение измерительных осей БИНС в процессе полета летательного аппарата.
1.2), относительно которого определяется положение измерительных осей БИНС в процессе полета летательного аппарата. В качестве гироскопических датчиков в БИНС используются три одноосных гироскопа и три акселерометра, которые жестко устанавливаются в блоке чувствительных элементов БИНС по трем ортогональным измерительным осям (рис.1.4). Блок чувствительных элементов, в свою очередь, жестко связан с корпусом летательного аппарата.
Рис.1.4 Измерительные оси блока чувствительных элементов БИНС
Гироскопы служат для определения углового положения измерительных осей блока чувствительных элементов относительно базового сопровождающего трехгранника, то есть углов крена, тангажа и курса летательного аппарата. Поскольку используемые в БИНС гироскопы работают, как правило, в режиме датчиков угловых скоростей, то для определения указанных углов их показания интегрируются . Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути.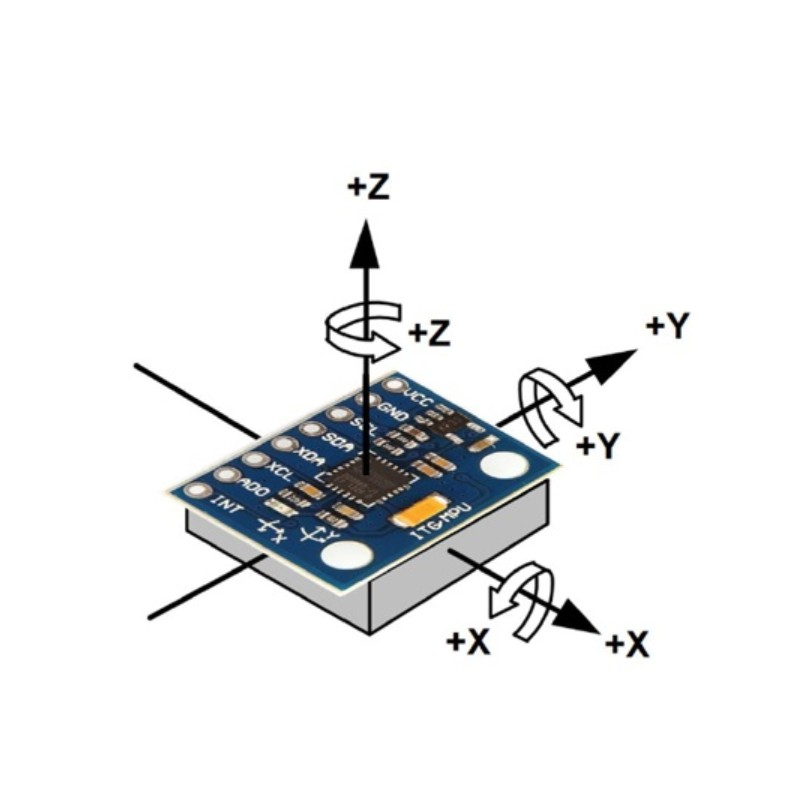
Рис.1.5 Начальные углы выставки БИНС
Перед началом полета осуществляется выставка БИНС, то есть определение начального углового положение измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
Полное отсутствие механических вращающихся частей делает БИНС чрезвычайно надежной системой в эксплуатации, а использование высокоскоростной бортовой вычислительной машины позволяет повысить точность такой системы за счет алгоритмической компенсации погрешностей гироскопических датчиков, обусловленных колебаниями температуры окружающей среды и механическими воздействиями.
В данном посте рассмотрена малая часть материала, представленная в книге к. т.н. Галкина В.И. «Перспективные гироскопы летательных аппаратов» ISNB 978-3-659-47948-9
т.н. Галкина В.И. «Перспективные гироскопы летательных аппаратов» ISNB 978-3-659-47948-9
В дальнейшем буду предоставлять еще немного информации из этой книги. Но тем кто заинтересовался и кому была полезна статья прошу выразить интерес в покупке книги.
Урок №10 – Изучаем гироскопический датчик
- Информация о материале
- Категория: Первые шаги
- Просмотров: 87585
Рейтинг: 4 / 5
Пожалуйста, оцените Оценка 1Оценка 2Оценка 3Оценка 4Оценка 5Содержание урока Введение: 10.1. Изучаем гироскопический датчик “Первые шаги” – послесловие
Введение:
Завершающий урок цикла “Первые шаги” посвятим изучению гироскопического датчика. Данный датчик, как и ультразвуковой, присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
10.1. Изучаем гироскопический датчик
Гироскопический датчик (Рис. 1) предназначен для измерения угла вращения робота или скорости вращения. Сверху на корпусе датчика нанесены две стрелки, обозначающие плоскость, в которой работает датчик. Поэтому важно правильно установить датчик на робота. Также для более точного измерения крепление гироскопического датчика должно исключать его подвижность относительно корпуса робота. Даже во время прямолинейного движения робота гироскопический датчик может накапливать погрешность измерения угла и скорости вращения, поэтому непосредственно перед измерением следует осуществить сброс в 0 текущего показания датчика. Вращение робота против часовой стрелки формирует отрицательные значения измерений, а вращение по часовой стрелке – положительные.
Рис. 1
Рассмотрим программный блок “Гироскопический датчик” (Рис. 2) Желтой палитры. Этот программный блок имеет три режима работы: “Измерение”, “Сравнение” и “Сброс”. В режиме “Измерение” можно измерить “Угол”, “Скорость” или одновременно “Угол и скорость”.
Рис. 2
Давайте закрепим гироскопический датчик на нашем роботе (Рис. 3), подсоединим его кабелем к порту 4 модуля EV3 и рассмотрим примеры использования.
Рис. 3
Задача №22: написать программу движения робота по квадрату с длиной стороны квадрата, равной длине окружности колеса робота.
Решение:
- Перед началом движения сбросим датчик в 0, используя программный блок “Гироскопический датчик” Желтой палитры;
- Мы уже знаем: чтобы проехать прямолинейно требуемое расстояние – необходимо, воспользовавшись программным блоком “Независимое управление моторами”, включить оба мотора на 1 оборот.

- Для поворота робота на 90 градусов в этот раз воспользуемся гироскопическим датчиком:
- используя программный блок “Независимое управление моторами”, заставим робота вращаться вправо вокруг своей оси;
- используя программный блок “Ожидание” в режиме “Гироскопический датчик”, будем ждать, пока значение угла поворота не достигнет 90 градусов;
- Выключим моторы;
- Используя программный блок “Цикл” в режиме “Подсчет”, повторим шаги 1 – 3 четыре раза.

Попробуйте решить Задачу №22 самостоятельно, не подглядывая в решение.
Решение Задачи №22 Рис. 4
“Первые шаги” – послесловие
Десятый урок завершает курс “Первые шаги”. На протяжении всех уроков вы познакомились с конструктором Lego mindstorms EV3, со средой программирования, научились использовать моторы и датчики. Если вы успешно одолели курс “Первые шаги”, то впереди вас ждет знакомство с решением популярных задач робототехники в рамках курса “Практика”. Удачи!
Если вы успешно одолели курс “Первые шаги”, то впереди вас ждет знакомство с решением популярных задач робототехники в рамках курса “Практика”. Удачи!
- Назад
Добавить комментарий
Датчики гироскопа | Датчики Althen
Точное определение скорости поворота без фиксированной точки отсчета
Гироскопы и датчики угловой скорости
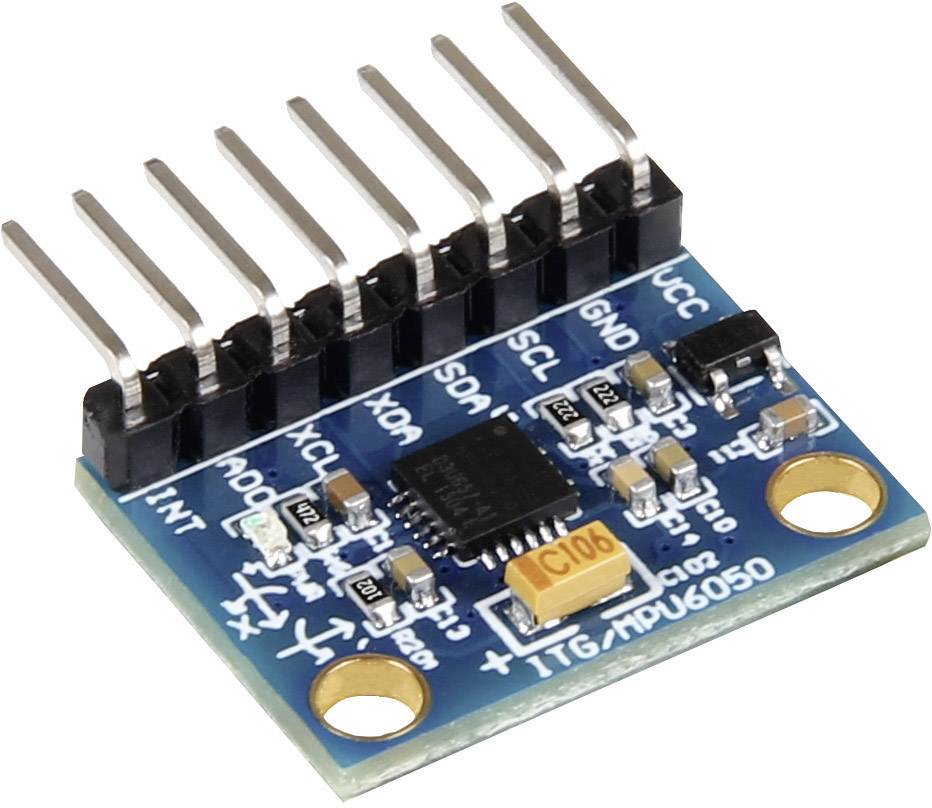
Гироскопические датчики используются всякий раз, когда требуется измерение скорости поворота без фиксированной точки отсчета . Наши гироскопические датчики оснащены новейшей кремниевой сенсорной технологией MEMS и имеют аналоговый или цифровой выход. Их диапазоны измерений лежат между 25°/с и 24 000°/с.
Наши датчики угловой скорости подходят для высокопроизводительных приложений, требующих точных измерений. Они обеспечивают надежные данные измерений — даже при сильных ударах и вибрациях. Это позволяет использовать наши гироскопические датчики в стабилизационных платформах и автономных транспортных средствах, а также в авиации, мореходстве и промышленности.
Мы будем рады помочь вам выбрать наиболее подходящий датчик гироскопа или измерительное решение. Заполните нашу контактную форму или свяжитесь с нами напрямую: вы можете найти номера телефонов и адреса электронной почты вашего ближайшее место на странице наших местоположений .
Обзор продукта Датчики гироскопа
Найдите идеальный датчик гироскопа для вашего приложения. Будем рады помочь вам выбрать.
Измерение угловой скорости без фиксированной точки отсчета
Гироскопы являются важным компонентом систем стабилизации для платформ и летательных аппаратов, таких как дроны, роботы и т. д. Наши датчики скорости поворота (гироскопы MEMS) используются всякий раз, когда вы хотите измерить угловая скорость (°/с) без фиксированной точки отсчета. Это отличает гироскопы от инструментов для тактильных измерений вращения, таких как тахометры или потенциометры. Благодаря современной кремниевой сенсорной технологии MEMS гироскопы Althen могут измерять угловую скорость даже в суровых условиях и при высоких температурах.
Ассортимент продукции Althen включает:
- Стандартные датчики угловой скорости: для промышленных и OEM-применений, экономичные и компактные
- Прецизионные датчики скорости поворота: для авиации и гонок, с отличной стабильностью и низким уровнем шума
- Датчики скорости поворота без корпуса: для прямой интеграции в систему, компактные, прочные и экономичные
- Инерциальные датчики: измерительные платформы (IMU) с тремя датчиками ускорения и тремя датчиками скорости поворота для навигации и других приложений с высокими требованиями
Свойства и преимущества гироскопических датчиков
- Высочайшая точность результатов измерений
- Высокая надежность
- Устойчивость к вибрации и ударам
- Подходит для суровых условий
- Широкий диапазон температур
- Небольшой компактный форм-фактор
- Низкое энергопотребление
- Экономичный
Возможные области применения гироскопических датчиков
- Автомобильная промышленность (навигация, обнаружение аварий, подушки безопасности и т. д.)
- Аэрокосмическая отрасль
- Судостроение
- Обрабатывающая промышленность и автоматизация
- Робототехника и AGV
- Военное применение
 д.)
д.)Наши датчики гироскопа в работе
Хотите познакомиться с нашей продукцией на практике? Взгляните на эти интересные проекты от наших клиентов:
Как работают наши датчики угловой скорости
Эти датчики (также называемые гироскопами) основаны на эффекте Кориолиса. Они регистрируют вращение, используя явление, называемое силой Кориолиса. Наши датчики скорости вращения содержат вибрационное или резонансное кольцо, изготовленное методом DRIE (глубокое реактивное ионное травление) в объемном кремнии. Кольцо подвешено на восьми парах симметричных спиц в форме собачьих лап. Процесс объемного травления кремния и наша уникальная запатентованная конструкция кольца позволяют получить определенные геометрические свойства с жесткими допусками, что обеспечивает точный баланс и термическую стабильность.
Чем они отличаются от других МЭМС-гироскопов?
В отличие от других МЭМС-гироскопов, наши датчики угловой скорости не имеют узких зазоров, которые могут привести к помехам и заеданию. Благодаря этому они работают лучше: их коэффициенты смещения и масштабирования более стабильны даже в широком диапазоне температур. Они также более устойчивы к вибрации и ударам. Еще одним преимуществом этой конструкции является то, что датчики по своей природе устойчивы к ошибкам скорости, вызванным ускорением или «чувствительностью к ускорению».
Гироскопические датчики | Технология | Epson
Связанные категории :
Устройства Электрические и электронные
Гироскопические датчики
, разработанные с использованием оригинального кварцевого кристалла, обеспечивают высокую чувствительность, стабильность и защиту от вибрации и Ударопрочность
Датчики движения, обнаруживающие движение людей и объектов, входят в число датчиков Epson. технологии решения. Гироскопические датчики («гироскопические датчики») представляют собой один из типов устройств обнаружения движения. Они есть
способны воспринимать движения, которые человеку трудно обнаружить, такие как вращение и изменения в
ориентация. Кристаллические элементы в гироскопических датчиках Epson изготовлены из высококачественного кристалла кварца, выращенного
Epson и имеют двойную Т-образную структуру. Они малошумные и обладают исключительной чувствительностью,
характеристики, вибростойкость и ударопрочность.
технологии решения. Гироскопические датчики («гироскопические датчики») представляют собой один из типов устройств обнаружения движения. Они есть
способны воспринимать движения, которые человеку трудно обнаружить, такие как вращение и изменения в
ориентация. Кристаллические элементы в гироскопических датчиках Epson изготовлены из высококачественного кристалла кварца, выращенного
Epson и имеют двойную Т-образную структуру. Они малошумные и обладают исключительной чувствительностью,
характеристики, вибростойкость и ударопрочность.
Датчики, определяющие направление вращения, угол поворота и вибрацию
Гироскопические датчики, также известные как датчики угловой скорости, могут обнаруживать изменения угла поворота на единицу
время. Это позволяет определять такие параметры, как направление вращения, угол поворота и
вибрация. Гироскопические датчики можно найти в смартфонах, цифровых камерах, игровых консолях, автомобильных навигационных системах,
роботы, промышленное оборудование и другие функции, такие как обнаружение вибрации, дрожание камеры
необходима коррекция и контроль отношения.
Гироскопические датчики классифицируются в зависимости от того, как они обнаруживают вращение. Есть вибрационный гироскоп датчики, механические гироскопические датчики и оптические гироскопические датчики, и это лишь некоторые из них. Материал элемента и конструкция различия могут привести к значительному различию точности измерения угловой скорости. Элемент гироскопа может быть изготовлен из таких материалов, как кварц, керамика или кремний. Путем изменения и разрабатывая материал элемента и структуру элемента, производители стремятся создать датчики очень маленького размера. и точными, а также с хорошей чувствительностью устройства, температурными характеристиками, ударопрочностью, стабильность и шумовые характеристики.
Высококачественный кристалл кварца Epson и уникальная двойная Т-образная структура
Epson производит крошечные легкие гироскопические датчики вибрации, которые имеют тонкий профиль и
кристаллическая единица с двойной Т-структурой. Они производятся с использованием комбинации передовых технологий Epson.
технология производства высококачественного кварцевого материала и уникальная микроэлектромеханическая технология Epson.
системная (MEMS) технология обработки.
Они производятся с использованием комбинации передовых технологий Epson.
технология производства высококачественного кварцевого материала и уникальная микроэлектромеханическая технология Epson.
системная (MEMS) технология обработки.
Вибрационные гироскопические датчики Epson измеряют угловую скорость по силе Кориолиса, приложенной к
вибрирующий кристалл кварца. Конструктивно наши гироскопические датчики состоят из статора, вибрирующих приводных рычагов на
по обе стороны от статора и пара чувствительных рычагов, которые проходят вертикально. Обычно приводные рычаги вибрируют в
определенное фиксированное направление. Когда гироскопический датчик вращается, и это вращательное движение применяется к кристаллу
элемент, сила Кориолиса действует на приводные рычаги, вибрация создается в вертикальном направлении,
статор изгибается, и чувствительные рычаги двигаются. Движение двух чувствительных рычагов создает разность потенциалов
от которого измеряется угловая скорость.