
гироскопический датчик – это… Что такое гироскопический датчик?
- гироскопический датчик
- gyroscope transmitter
Большой англо-русский и русско-английский словарь. 2001.
- гироскопический
- гироскопический интегратор
Смотреть что такое “гироскопический датчик” в других словарях:
гироскопический датчик угловой скорости — гиротахометр демпфирующий гироскоп дифференцирующий гироскоп Гироскопический прибор, предназначенный для измерения проекции вектора угловой скорости основания на входную ось прибора. Примечание Датчик на основе роторного гироскопа образован… … Справочник технического переводчика
Гироскопический интегратор — гироскопическое устройство (См.
 Гироскопические устройства), содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают Г. и. угловой скорости и Г. и. линейных ускорений … Большая советская энциклопедия
Гироскопические устройства), содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают Г. и. угловой скорости и Г. и. линейных ускорений … Большая советская энциклопедияАГБ-3 — Авиагоризонт АГБ 3 Авиагоризонт АГБ 3 (авиагоризонт бомбардировщика) самый распространенный[источник … Википедия
гироазимутгоризонт — курсовертикаль Гироскопическая система, предназначенная для воспроизведения на движущемся основании требуемого направления в горизонтальной плоскости, направления местной вертикали и для измерения отклонений от этих направлений, составными… … Справочник технического переводчика
гирогоризонткомпас
ГИРОСКОП — навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться.
 Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками… … Энциклопедия Кольера
Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками… … Энциклопедия КольераГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения — Терминология ГОСТ 15528 86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа: 26. Акустический преобразователь расхода D. Akustischer Durch flußgeber E. Acoustic flow transducer F … Словарь-справочник терминов нормативно-технической документации
Гироскоп — Иллюстрация к основному свойству 3 степенного гироскопа (идеализированное функционирование). Гироскоп (от др. греч … Википедия
Гиростабилизатор — гироскопическое устройство (См. Гироскопические устройства), предназначенное для стабилизации отдельных объектов или приборов, а также для определения угловых отклонений объектов. По принципу действия Г.
Жёсткий диск — Запрос «HDD» перенаправляется сюда; см. также другие значения … Википедия
Точка (тактический ракетный комплекс) — У этого термина существуют и другие значения, см. Точка. Точка индекс ГРАУ 9K79 обозначение НАТО SS 21 Scarab A, по договору РСМД ОТР 21 … Википедия
Гироскоп LEGO Education Mindstorms EV3
Гироскоп LEGO Education Mindstorms EV3 | LEGO 45505 купить – EducubeГироскоп LEGO Education Mindstorms EV3
Education EV3 Gyro Sensor
Характеристики
| Артикул | 45505 |
| Страна | Дания |
| Возраст | 10+ |
| Количество элементов | 1 |
| Производитель | LEGO Education |
| Вес | 0. 5 кг 5 кг |
Описание
Гироскопический датчик измеряет вращательное движение робота и изменение его положения.
- Может использоваться для определения текущего направления вращения
- Точность: +/- 3 градуса на 90 градусов оборота (в режиме измерения наклона)
- Может определить максимум 440 градусов/c (в режиме гироскопа)
- Частота опроса датчика: 1 кГц
- Автоматически идентифицируется EV3
На видео показан робот-сигвей, который использует данный датчик для балансирования на 2 колесах.
Необходимые товары Рекомендуемые товары Видео
Гироскоп LEGO Education Mindstorms EV3 LEGO 45505- Может использоваться для определения текущего направления вращения
- Точность: +/- 3 градуса на 90 градусов оборота (в режиме измерения наклона)
- Может определить максимум 440 градусов/c (в режиме гироскопа)
- Частота опроса датчика: 1 кГц
- Автоматически идентифицируется EV3
На видео показан робот-сигвей, который использует данный датчик для балансирования на 2 колесах.
4150 EduCube.ru Новый
?> X
Сайт может собирать метаданные пользователя (cookie, данные об IP-адресе и местоположении).
Если, прочитав это сообщение, вы остаетесь на нашем сайте, это означает, что вы не возражаете против использования этих технологий.
LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2021 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.
Гироскопический датчик EV3 45505 Lego Education Mindstorms
Гироскопический датчик измеряет вращательное движение робота и изменение его положения. — Может использоваться для определения текущего направления вращения — Точность: +/- 3 градуса на 90 градусов оборота (в режиме измерения наклона) — Может определить максимум 440 градусов/c (в режиме гироскопа) — Частота опроса датчика: 1 кГц
Гироскопический датчик измеряет вращательное движение робота и изменение его положения.
- Может использоваться для определения текущего направления вращения
- Точность: +/- 3 градуса на 90 градусов оборота (в режиме измерения наклона)
- Может определить максимум 440 градусов/c (в режиме гироскопа)
- Частота опроса датчика: 1 кГц
- Автоматически идентифицируется EV3
Изучаем гироскопический датчик
Гироскопический датчик (Рис. 1) предназначен для измерения угла вращения робота или скорости вращения. Сверху на корпусе датчика нанесены две стрелки, обозначающие плоскость, в которой работает датчик. Поэтому важно правильно установить датчик на робота. Также для более точного измерения крепление гироскопического датчика должно исключать его подвижность относительно корпуса робота. Даже во время прямолинейного движения робота гироскопический датчик может накапливать погрешность измерения угла и скорости вращения, поэтому непосредственно перед измерением следует осуществить сброс в 0
 Вращение робота против часовой стрелки формирует отрицательные значения измерений, а вращение по часовой стрелке – положительные.
Вращение робота против часовой стрелки формирует отрицательные значения измерений, а вращение по часовой стрелке – положительные. Рис. 1
Рассмотрим программный блок «Гироскопический датчик» (Рис. 2) Желтой палитры. Этот программный блок имеет три режима работы: «Измерение», «Сравнение» и «Сброс». В режиме «Измерение» можно измерить «Угол», «Скорость» или одновременно «Угол и скорость».
Рис. 2
Давайте закрепим гироскопический датчик на нашем роботе
Рис. 3
Принцип работы гироскутера – полезная информация об электронике
В наши дни, такое средство передвижения как гироскутер, приобретает большую популярность. Но не смотря на то, что на улицах становится все больше людей на двухколесном транспорте будущего, далеко не все знают, как он работает. Также, многие попросту боятся вставать на гиросктуер, не понимая, как им управлять. В этой статье, мы расскажем вам от том, каким же образом устроен гироскутер, его основные принципы работы, а также дадим советы, как управлять этим чудо-транспортом.
Но не смотря на то, что на улицах становится все больше людей на двухколесном транспорте будущего, далеко не все знают, как он работает. Также, многие попросту боятся вставать на гиросктуер, не понимая, как им управлять. В этой статье, мы расскажем вам от том, каким же образом устроен гироскутер, его основные принципы работы, а также дадим советы, как управлять этим чудо-транспортом.
Как устроен гироскутер?
И так, давайте разберем гироскутер и заглянем, что находится внутри.
- Колеса-приводы со встроенным электронным мотором
- Центральный компьютер, отвечающий за обработку информации, а также за исправную работу гироскопических датчиков
- Гироскопический датчик
- Металлическое высокопрочное соединение
- Несущая рама
- Литий –ионный аккумулятор
Внимание! Не в коем случае не разбирайте гироскутер самостоятельно! В случае необходимости обращайтесь в специализированный сервисный центр.
Не смотря на то, что все гироскутры устроены примерно одинаково, некоторые производители встраивают дополнительные функции.
Как управлять гироскутером?
На первый взгляд, может показаться что управлять гироскутером достаточно сложно. На самом-же деле это не так.
- Включите гироскутер.
- Встаньте одной ногой на гироскутер и дождитесь сигнала о включении системы удержания равновесия, после поставьте на гироскутер вторую ногу.
- Для начала, стоит научиться удерживать равновесие стоя на одном месте. Попросите вам помочь и постойте неподвижно.
- Далее начните медленное движение, немного наклоняясь вперед и назад.
- Попробуйте повернуться, перенося вес на левую ногу, чтобы повернуть направо или правую ногу, чтобы повернуть налево.
К примеру, гиросутеры от компании «КАРКАМ Электроникс» оснащены дополнительной подсветкой, для удобной езды ночью. Также в корпус встроены колонки, которые позволяют воспроизводить музыку через Bluetooth соединение.
Также в корпус встроены колонки, которые позволяют воспроизводить музыку через Bluetooth соединение.
В большинстве случаев, достаточно 15-20 минут, чтобы овладеть базовыми навыками управления гироскутером, после чего, вы сможете передвигаться на нем самостоятельно, без чьей либо помощи.
Конструктор Lego Mindstorms 45505 Гироскопический датчик EV3
Основные характеристики
Рекомендуемый возраст ?от 10 лет
Количество деталей, шт. ?
?1
Материал ? Пластик Заметили ошибку или неточность в описании товара? Сообщите нам, пожалуйста.
Авторизация
Авторы: В.Я. Распопов, Д.М. Малютин, Р.В. Алалуев, С.В. Телухин, С.И. Шепилов
Эксплуатационные характеристики гироскопических датчиков углов (ГДУ) с шарикоподшипниковым подвесом (ШПП), такие как детерминированная наводка от тока датчика момента на выходные цепи датчиков углов и скорость управляемого движения ротора, оказывают значительное влияние на работу контура стабилизации и управления гироплатформы. Эксплуатационные характеристики ГДУ могут быть улучшены за счет модернизации конструкции. Идея модернизации заключается в реализации независимых друг от друга электромагнитных цепей датчиков углов и моментов.
Ключевые слова: трехстепенной гироскоп, шарикоподшипниковый подвес, гироскопический датчик угла
| ОБ АВТОРАХ |
Распопов Владимир Яковлевич. Малютин Дмитрий Михайлович. Кандидат технических наук, доцент, профессор кафедры «Приборы управления», ФГБОУ ВО «Тульский государственный университет». Алалуев Роман Владимирович. Кандидат технических наук, доцент кафедры «Приборы управления», ФГБОУ ВО «Тульский государственный университет». Член секции молодых ученых международной общественной организации «Академия навигации и управления движением». Телухин Сергей Владимирович. Кандидат технических наук, доцент кафедры «Приборы управления», ФГБОУ ВО «Тульский государственный университет».
Шепилов Сергей Игоревич. Главный конструктор, АО «Мичуринский завод «Прогресс». |
 Доктор технических наук, профессор, заведующий кафедрой «Приборы управления», ФГБОУ ВО «Тульский государственный университет». Действительный член международной общественной организации «Академия навигации и управления движением». Заслуженный деятель науки РФ.
Доктор технических наук, профессор, заведующий кафедрой «Приборы управления», ФГБОУ ВО «Тульский государственный университет». Действительный член международной общественной организации «Академия навигации и управления движением». Заслуженный деятель науки РФ.

Для цитирования
Распопов В.Я., Малютин Д.М., Алалуев Р.В., Телухин С.В., Шепилов С.И. Гироскопический датчик углов со сферическим шарикоподшипниковым подвесом с улучшенными эксплуатационными характеристиками // Гироскопия и навигация. 2018. №2 (101). С. 88-94. DOI 10.17285/0869-7035.2018.26.2.088-094
Журнал «Гироскопия и навигация» включен в «Перечень ведущих рецензируемых научных журналов и изданий, в которых должны быть опубликованы основные научные результаты диссертации на соискание ученой степени доктора и кандидата наук»
Гироскопические датчики| Базовые знания технологии MEMS
Motion имеет шесть степеней свободы: перемещение в трех ортогональных направлениях и вращение вокруг трех ортогональных осей. Последние три измеряются датчиком угловой скорости, также известным как гироскоп или просто гироскоп. Гироскоп основан на втором законе Ньютона, как и акселерометр. Когда к уравнениям Ньютона добавляется вращение, появляется математический термин, описывающий виртуальную силу, называемую силой Кориолиса. Преобразование вращения в силу Кориолиса является основой работы гироскопа.В гироскопе требуется первичное или начальное движение; сила Кориолиса является результатом двух ортогональных движений и ортогональна им обоим.
Когда к уравнениям Ньютона добавляется вращение, появляется математический термин, описывающий виртуальную силу, называемую силой Кориолиса. Преобразование вращения в силу Кориолиса является основой работы гироскопа.В гироскопе требуется первичное или начальное движение; сила Кориолиса является результатом двух ортогональных движений и ортогональна им обоим.
В гироскопах MEMS первичное движение не может быть непрерывным вращением, как в обычных гироскопах, из-за отсутствия хороших подшипников в MEMS. Вместо этого в качестве основного движения используются механические колебания. Когда колебательный гироскоп подвергается воздействию угловой скорости, ортогональной направлению первичного движения, возникает волнообразная сила Кориолиса. Это создает вторичное колебание, ортогональное первичному, оси угловой скорости и частоте первичного колебания.Амплитуда этого связанного колебания является мерой угловой скорости, и в гироскопе Murata Electronis Oy она регистрируется емкостным способом.
Murata основаны на самых надежных и надежных принципах конструкции. Они устраняют большинство паразитных откликов и подверженность вибрации, которые мешают многим Гироскопам MEMS. Компания Murata запатентовала эти инновационные гироскопы как для горизонтальных, так и для вертикальных осей зондирования. Они используются в автомобильных и других высокоточных гироскопах.
Трехосевой гироскопMurata основан на одном сложном режиме колебаний в качестве основного движения для всех трех осей. Каждая ось воспринимается отдельно. Электроника интерфейса основана на новой концепции фазового детектирования, которая обеспечивает наименьший размер схемы среди гироскопов потребительского класса. Эти гироскопы используются для управления пользовательским интерфейсом и оптической стабилизации изображения.
Точность гироскопического датчика – ev3basic
Для моего пишущего робота (WriterBot) проекта я решил попробовать использовать гироскопический датчик для повышения точности письма робота. Отдельные буквы были нарисованы более точно, но когда робот рисовал строку из нескольких букв, линия текста начинала резко изгибаться вниз. Я решил провести несколько тестов, чтобы увидеть, насколько точен и надежен мой гироскопический датчик. Кроме того, я хотел знать, являются ли какие-либо неточности систематическими и предсказуемыми, чтобы их можно было компенсировать в коде.
Отдельные буквы были нарисованы более точно, но когда робот рисовал строку из нескольких букв, линия текста начинала резко изгибаться вниз. Я решил провести несколько тестов, чтобы увидеть, насколько точен и надежен мой гироскопический датчик. Кроме того, я хотел знать, являются ли какие-либо неточности систематическими и предсказуемыми, чтобы их можно было компенсировать в коде.Итак, я потратил час, крутя робот и гироскоп взад и вперед на платформе «ленивой Сьюзан», записывая реальные использованные углы (180 ° и 360 °) и углы, сообщаемые гироскопическим датчиком, как показано на виде порта на кирпич.Я внимательно следил за тем, чтобы датчик оставался неподвижным при запуске робота, чтобы показания не менялись – это подтверждалось стабильным показанием в поле зрения порта, когда робот был неподвижен. Всего я сделал около 40 измерений. Вот мои наблюдения в деталях:
При вращении датчика по часовой стрелке на 360 ° достаточно быстро (примерно за 5 с), я почти всегда получал измеренные изменения угла от 351 ° до 355 °, с в среднем около 353 °. Это означает, что датчик значительно недооценил вращение по часовой стрелке примерно на 2%. Датчик ВСЕГДА занижал угол поворота по часовой стрелке.
Это означает, что датчик значительно недооценил вращение по часовой стрелке примерно на 2%. Датчик ВСЕГДА занижал угол поворота по часовой стрелке.
При повороте датчика по часовой стрелке на 360 ° достаточно медленно (примерно за 10 с), я получил менее последовательные, более неточные показания, между 326 ° и 353 ° со средним показанием для изменения угла около 345 °: очень неточно.
При повороте датчика против часовой стрелки на 360 ° довольно быстро быстро , я почти всегда получал измеренные изменения угла от 359 ° до 363 °, в среднем около 361 °.Это означает, что датчик обычно довольно точно измерял вращение против часовой стрелки.
При повороте датчика против часовой стрелки на 360 ° достаточно медленно , я получил менее последовательные, более неточные показания, между 335 ° и 375 ° со средним показанием для изменения угла около 360 ° : очень изменчивый.
Я также пробовал сделать jerky вращение на 360 ° в обоих направлениях и получил свой худший результат: 405 ° для вращения на 360 ° против часовой стрелки!
Когда я повернул датчик на 180 ° вместо 360 ° , я получил те же результаты, что и выше, с датчиком заниженным примерно на 2 поворота по часовой стрелке.В среднем 5%, но дает лучшие результаты при вращении против часовой стрелки.
Я также пробовал варьировать близость датчика к кирпичу, проводя некоторые испытания с датчиком, прикрепленным непосредственно к стороне кирпича, а другие – с датчиком на расстоянии нескольких см от кирпича (прикрепленным к концу длинного конструктора Lego. балка, которая сама крепилась к кирпичу). Исходя из моих наблюдений, положение датчика не имело значения – датчик не испытывал никаких помех со стороны электроники кирпича, даже когда он был близко.
Последнее наблюдение: хотя я убедился, что показания датчика не блуждают перед испытаниями, я заметил, что показания иногда начинали блуждать во время моих экспериментов. В одном случае после медленного вращения на 360 ° датчик начал отклоняться на -0,5 градуса в секунду, что привело бы к большим неточностям в последующих показаниях, если бы я не повторно инициализировал датчик.
Затем я провел вторую серию экспериментов, запустив эту программу:
'GYRO SENSOR TEST
' Присоедините двигатели к портам B и C
'Присоедините гироскопический датчик к порту 2
Датчик.SetMode (2,0) 'угол измерения
Sensor.Wait (2) ' (Не обязательно)
startangle = Sensor.ReadRawValue (2, 0)
speed = 20 'должно быть положительным
Для n = от 1 до 10
Motor.StartSync ("BC", speed, -speed)
While Sensor.ReadRawValue (2, 0) -startangle < 360
EndWhile
Двигатель. StartSync ("BC", - скорость, скорость)
StartSync ("BC", - скорость, скорость)
Пока Sensor.ReadRawValue (2, 0) -startangle> 0
EndWhile
EndFor
Motor.Stop ("BC", "True")
Поскольку гироскопический датчик не может быть сброшен на ноль градусов с помощью кода, эта программа сначала записывает начальный угол как начальный угол, так что углы могут быть найдены относительно начального положения как новый угол - начальный угол. Эта программа заставляет робота вращаться по часовой стрелке до тех пор, пока датчик не обнаружит, что робот повернулся как минимум на 360 ° относительно начального угла, затем он снова поворачивает робота, пока угол не вернется в исходное положение (или не выйдет за его пределы).Этот цикл повторяется 10 раз. После 10 циклов робот вернулся бы в исходное положение, если бы гироскопический датчик работал безупречно. Я запускал эту программу около 20 раз, используя разные значения скорости (5, 10, 20, 30). Практически каждый раз конечная позиция была значительно по часовой стрелке относительно начальной. В первой серии прогонов результаты были довольно последовательными для каждой скорости:
Практически каждый раз конечная позиция была значительно по часовой стрелке относительно начальной. В первой серии прогонов результаты были довольно последовательными для каждой скорости:
- При скорости = 5 конечная позиция была 360 ° по часовой стрелке от начальной позиции, поэтому каждый цикл по часовой стрелке / против часовой стрелки вызывал робота чтобы закончить на 36 ° по часовой стрелке от того места, где он был в начале этого цикла - очень большая ошибка !
- При скорости = 10 конечное положение было 170 ° по часовой стрелке от исходного положения, поэтому каждый цикл по часовой / против часовой стрелки заставлял робота финишировать на 17 ° по часовой стрелке от того места, где он был в начале этого цикла - a большая ошибка!
- При скорости = 20 конечная позиция была 100 ° по часовой стрелке от начальной позиции, поэтому каждый цикл по часовой / против часовой стрелки заставлял робота финишировать на 10 ° по часовой стрелке от того места, где он был в начале этого цикла - a существенная ошибка.
- При скорости = 30 конечная позиция была 80 ° по часовой стрелке от начальной позиции, поэтому каждый цикл по часовой / против часовой стрелки заставлял робота финишировать на 8 ° по часовой стрелке от того места, где он был в начале этого цикла - a существенная ошибка.
 Если колесо вращается со скоростью 1,452 градуса в секунду, датчик округляет это значение до 1 градуса в секунду, что приводит к огромной (45%) ошибке округления. Итак, мы узнаем, что гироскоп, вероятно, может более точно измерять повороты, если они выполняются быстро.
Если колесо вращается со скоростью 1,452 градуса в секунду, датчик округляет это значение до 1 градуса в секунду, что приводит к огромной (45%) ошибке округления. Итак, мы узнаем, что гироскоп, вероятно, может более точно измерять повороты, если они выполняются быстро.Затем я попытался выключить и включить робота и снова запустить программу, и был разочарован, увидев, что поведение датчика изменилось. Например, используя скорость = 20, я теперь получал постоянную конечную ошибку 25 ° вместо 100 °. Таким образом, это означает, что если вы хотите попытаться компенсировать ошибки гироскопического датчика, вам придется запускать тест, подобный приведенному выше, каждый раз, когда датчик включается.Я думаю, что после того, как тест был выполнен и были внесены соответствующие настройки в основную программу, он должен действовать до следующего отключения питания датчика.
Я также заметил, что иногда (примерно 1 попытка из 10) первое (по часовой стрелке) вращение робота было очень далеко от 360 °, которые он должен был повернуть.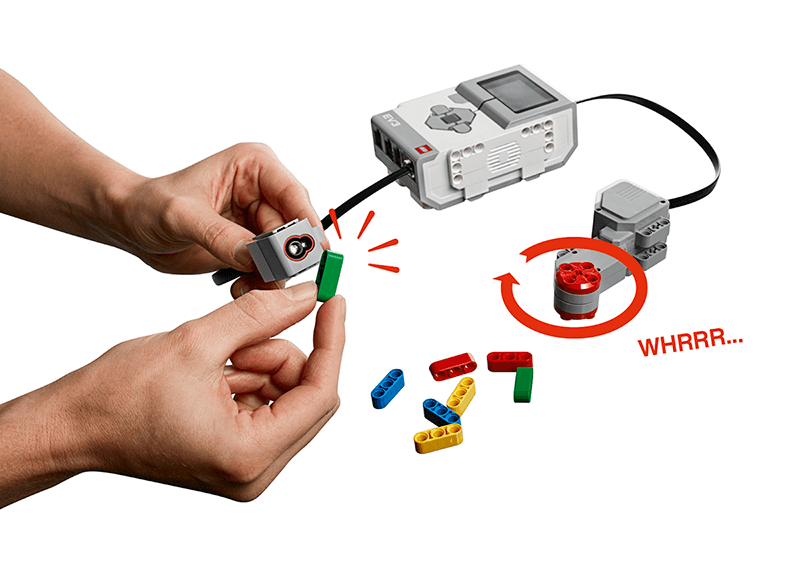 Например, иногда робот повернулся только на 270 ° вместо 360 ° при первом повороте по часовой стрелке. Так что в поведении датчика действительно много несоответствий.
Например, иногда робот повернулся только на 270 ° вместо 360 ° при первом повороте по часовой стрелке. Так что в поведении датчика действительно много несоответствий.
Заключение
Мой тщательно инициализированный гироскопический датчик обычно довольно точно измеряет вращение против часовой стрелки, но обычно значительно недооценивает вращение по часовой стрелке. Моя первая серия экспериментов показала, что датчик занижает скорость вращения по часовой стрелке примерно на 2,5% . Может показаться, что это не так много, но эти ошибки будут накапливаться, поэтому, например, если мой датчик повернут вперед и назад на 360 ° десять раз, ошибка будет около 2.5% x 360 ° x 10 = 45 ° , что действительно важно. Я также заметил, что ошибки были большими для медленных или резких вращений и меньшими для более быстрых и плавных вращений («быстрее» означает полный оборот примерно за 5 секунд). Мой второй набор тестов (с программой выше) показывает, что ошибки также различаются от одного сеанса к другому («сеанс» означает период, в течение которого датчик постоянно получает питание).
Возможно, что мои наблюдения применимы только к гироскопическому датчику мой , но также возможно, что они применимы ко всем гироскопическим датчикам EV3 - если вам нужна высокая точность от вашего датчика, вы должны провести свои собственные тесты...
На основе своих тестов я пришел к выводу, что в ошибках, сделанных датчиком, есть систематический компонент, который я попытался компенсировать в моем коде WriterBot, внося регулярные корректировки, чтобы учесть, что угол, измеренный датчиком будет постепенно отклоняться все больше и больше в отрицательном (против часовой стрелки) направлении по сравнению с истинным углом поворота. Этот обходной путь кода был полезен, но может быть действителен только в течение одного сеанса. Если датчик выключен, а затем перезапущен, необходимо будет найти новый коэффициент настройки (методом проб и ошибок или с использованием вышеуказанной программы), чтобы компенсировать смещение датчика.
Гироскопический датчик- Epson Europe Electronics GmbH
Гироскопический датчик
Стандартные гироскопические датчики
Гироскопические датчики для автомобилей
Датчики давления и температуры
Новинка: этот список включает специальные таблицы данных, документы RoHS и REACH по продуктам, а также инвентаризационную проверку.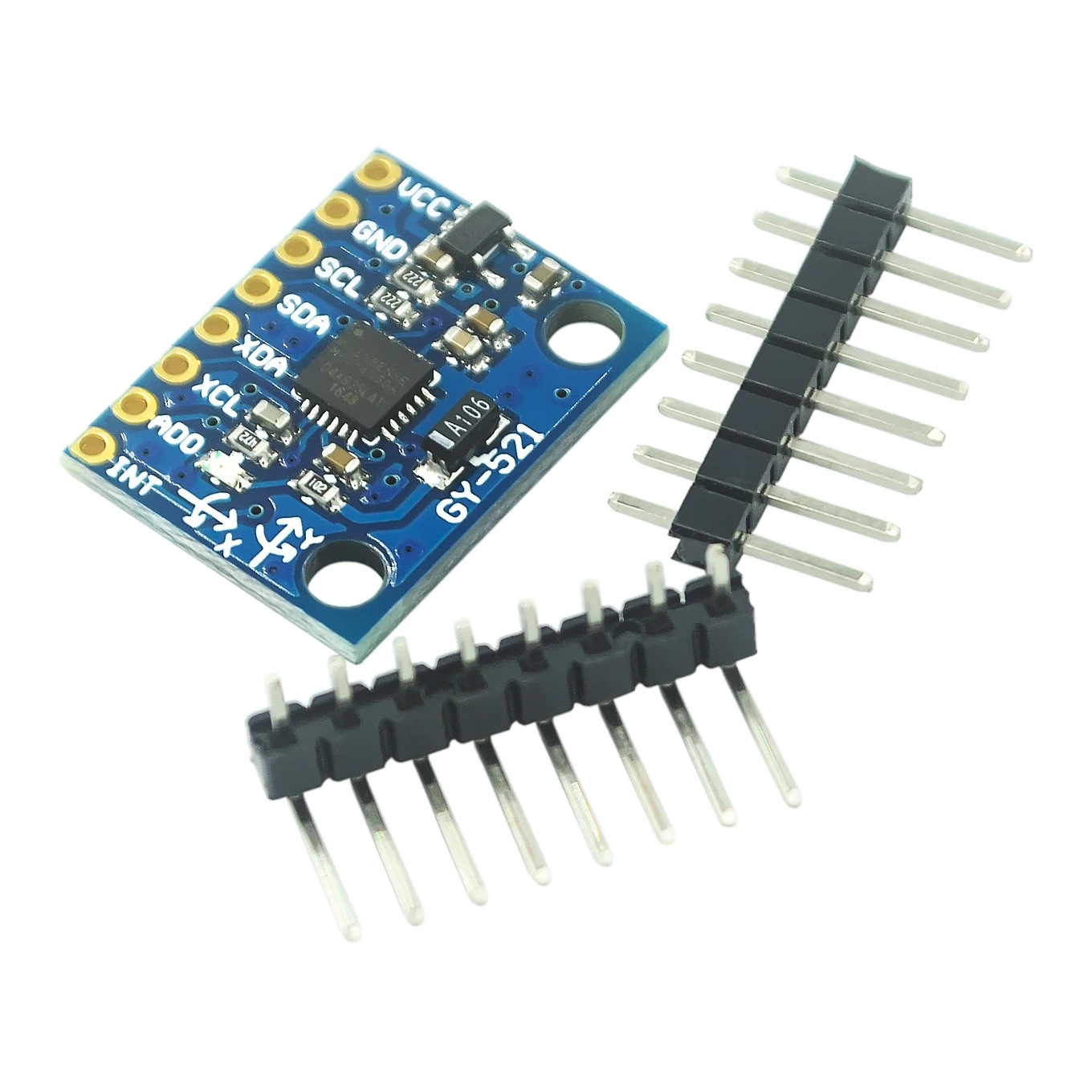
Параметрический поиск: датчики гироскопа Epson
Образец и КупитьXV-3500CB
Сверхмалый гироскопический датчик вибрации
Этот гироскопический датчик может похвастаться беспрецедентной стабильностью благодаря использованию монокристаллического кристалла кварца для недавно разработанного гироскопического элемента размером всего 5.0 мм x 3,2 мм x 1,3 мм.
XV-8000 серии
Гироскопические датчики для автомобильной навигации и персональных навигационных устройств
Для гироскопических датчиков серии XV-8000 компания Epson использовала уникальный кристалл гироэлемента, обеспечивающий исключительную стабильность. XV-8000series идеально подходит для точного счисления, метода, используемого в автомобильной навигации для определения местоположения.
XV-8000series идеально подходит для точного счисления, метода, используемого в автомобильной навигации для определения местоположения.
XV-9000 серии
Высоконадежный гироскопический датчик для систем безопасности автомобилей
Гиродатчики серии XV-9000 разработаны для обеспечения высокой надежности, включая функцию самопроверки, и поэтому лучше всего подходят для таких чувствительных приложений, как автомобильная безопасность.
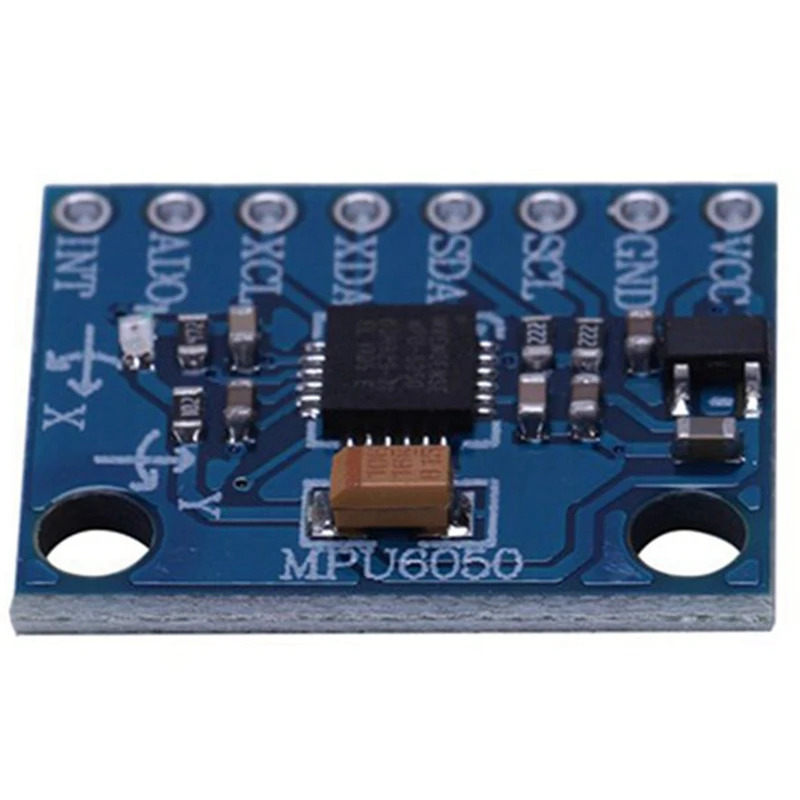
Купить MPU 6050 3-х осевой акселерометр гироскопа по лучшей цене
В модуле 3-осевого акселерометра и гироскопического датчика MPU-6050 используется MPU-6050, который представляет собой небольшую часть технологии обработки движения. Техническое описание MPU6050 доступно во вложении, чтобы получить этот визит.
Техническое описание MPU6050 доступно во вложении, чтобы получить этот визит.
Доступны различные типы магнитометров; основные различия между MPU6000, MPU6050 и MPU6500:
| MPU6000 | MPU 6050 | МПУ 6500 |
| 1.Частота дискретизации 8 кГц. | 1. Частота дискретизации 8 кГц. | 1. Частота дискретизации 32 кГц. |
| 2. Поддерживает интерфейс SPI и I 2 C. Но I 2 C слишком медленный, чтобы обрабатывать обновление гироскопа 8 кГц. | 2. Поддерживает протокол связи интерфейса I 2 C. | 2. Поддерживает интерфейс I 2 C и SPI. |
| 3. Чувствительность к вибрации лучше, чем у MPU6500. | 3. Чувствительность к вибрации лучше, чем у MPU6500, но скорость работы меньше, чем у MPU6000. | 3. Он более восприимчив к вибрациям, поэтому необходим некоторый метод виброизоляции. Он быстрее обоих MPU. |
Устройства MPU6050 объединяют 3-осевой гироскоп и 3-осевой акселерометр на одном кристалле вместе со встроенным цифровым процессором движения (DMP), способным обрабатывать сложные 9-осевые алгоритмы MotionFusion. Чтобы получить больше информации о технических характеристиках, посетите лист данных MPU6050.
Характеристики:
- Чип встроенный 16-битный аналого-цифровой преобразователь, 16-битный вывод данных.
- I2C Цифровой вывод 6- или 9-осевых данных MotionFusion в матрице вращения, кватернионе, угле Эйлера или в формате необработанных данных.
- Выбираемые паяные перемычки на CLK, FSYNC и AD0. Движок
- Digital Motion Processing ™ (DMP ™) снимает нагрузку со сложного MotionFusion, синхронизации датчиков и обнаружения жестов.
- Встроенные алгоритмы смещения времени выполнения и калибровки компаса. Никакого вмешательства пользователя не требуется.
- Датчик температуры с цифровым выходом.
В коплект входит:
1 x MPU-6050 гироскопический датчик 2 + акселерометр.
1 x 1 * 8 контактов разъема Burg (под прямым углом).
1x 1 * 8 контактов разъема Burg (прямые).
Гарантия 15 днейНа этот товар распространяется стандартная гарантия сроком 15 дней с момента доставки только в отношении производственных дефектов. Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Что аннулирует гарантию:
Если продукт подвергся неправильному использованию, вскрытию, статическому разряду, аварии, повреждению водой или огнем, использованию химикатов, пайке или каким-либо изменениям.
MPU6050 Датчик акселерометра / гироскопа - ESPHome
Сенсорная платформа mpu6050 позволяет использовать акселерометр / гироскоп MPU6050
(техническая спецификация,
SparkFun) сенсоры с
ESPHome. Автобус I²C
необходимо настроить в вашей конфигурации для работы этого датчика.
Автобус I²C
необходимо настроить в вашей конфигурации для работы этого датчика.
Этот компонент выполняет только базовую фильтрацию, но не калибровку. Из-за сложности этот датчик и количество возможных вариантов конфигурации, вам, вероятно, следует создать собственный компонент, скопировав и изменив существующий код, если вам нужен конкретный новая особенность.Было бы довольно сложно поддерживать все возможные варианты использования.
Датчик акселерометра / гироскопа MPU6050.
# Пример записи конфигурации
датчик:
- платформа: mpu6050
адрес: 0x68
Accel_x:
имя: "MPU6050 Accel X"
Accel_y:
имя: "MPU6050 Accel Y"
Accel_z:
имя: "MPU6050 Accel z"
gyro_x:
имя: "MPU6050 Gyro X"
gyro_y:
имя: "MPU6050 Gyro Y"
gyro_z:
название: "MPU6050 Gyro z"
температура:
имя: «Температура MPU6050»
Переменные конфигурации:
адрес ( Дополнительно , int): вручную укажите адрес I²C датчика.
 По умолчанию
По умолчанию 0x68.excl_x ( Дополнительно ): используйте ось X акселерометра. Все варианты от Датчик.
excl_y ( Дополнительно ): используйте ось Y акселерометра. Все варианты от Датчик.
excl_z ( Дополнительно ): используйте ось Z акселерометра. Все варианты от Датчик.
gyro_x ( Дополнительно ): используйте ось X гироскопа.Все варианты от Датчик.
gyro_y ( Дополнительно ): используйте ось Y гироскопа. Все варианты от Датчик.
gyro_z ( Дополнительно ): используйте ось Z гироскопа. Все варианты от Датчик.
температура ( Дополнительно ): используйте внутреннюю температуру датчика. Все варианты от Датчик.
update_interval ( Необязательно , Время): интервал проверки датчика.
 По умолчанию
По умолчанию 60 с.id ( Необязательно , ID): вручную укажите идентификатор, используемый для генерации кода.
См. Также
Самый маленький гироскоп в мире
Корпорация Seiko Epson («Epson») объявила сегодня, что совместная разработка с NGK Insulators, Ltd. («NGK») позволила разработать самый маленький * 1 гироскопический датчик в своем роде в мире. XV-3500CB, как называется новый гироскопический датчик, планируется начать серийное производство в декабре 2004 года и представляет собой первый залп Epson в борьбе за расширение сферы своего бизнеса по производству кварцевых устройств.
Новый гироскопический датчик может похвастаться беспрецедентной стабильностью благодаря использованию монокристаллического кристалла кварца в недавно разработанном гироскопическом элементе. Используя оригинальную технологию микропроцессорной обработки кристаллов Epson, технологию аналоговых схем с низким энергопотреблением и технологию упаковки, совместная группа разработчиков смогла создать гироскоп, измеряющий всего 5 единиц.0 мм x 3,2 мм x 1,3 мм, что делает его самым маленьким гироскопическим датчиком в мире со встроенной схемой управления.
Используя оригинальную технологию микропроцессорной обработки кристаллов Epson, технологию аналоговых схем с низким энергопотреблением и технологию упаковки, совместная группа разработчиков смогла создать гироскоп, измеряющий всего 5 единиц.0 мм x 3,2 мм x 1,3 мм, что делает его самым маленьким гироскопическим датчиком в мире со встроенной схемой управления.
Этот сверхминиатюрный датчик угловой скорости идеально подходит для использования в системах, корректирующих вибрацию камеры. Сенсор позволит компактным цифровым камерам, камерам-телефонам и другим продуктам оснащаться функцией высокопроизводительной коррекции движения.
Epson выходит за рамки своей традиционной области на рынке устройств для измерения времени и активно участвует на рынке сенсоров, который является новым направлением деятельности.В дальнейшем усилия компании будут направлены на разработку новых продуктов, использующих датчики обнаружения движения. Усилия по разработке продуктов будут варьироваться от игровых автоматов, устройств безопасности с дистанционным управлением и т. Д. На низком уровне, вплоть до навигационных систем, приложений управления ориентацией (гироскоп) и аналогичных систем на высоком уровне.
Д. На низком уровне, вплоть до навигационных систем, приложений управления ориентацией (гироскоп) и аналогичных систем на высоком уровне.
Технические характеристики продукта здесь.
Ученые анализируют, как пандемия повлияла на качество воздуха
Ссылка : Самый маленький гироскоп в мире (3 августа 2004 г.) получено 15 октября 2021 г. с https: // физ.org / news / 2004-08-world-smallest-gyro-sensor.html
Этот документ защищен авторским правом.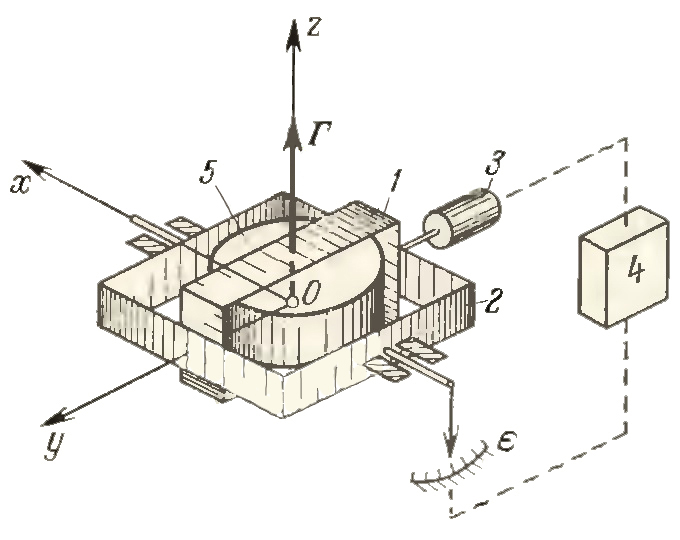 За исключением честных сделок с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
За исключением честных сделок с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
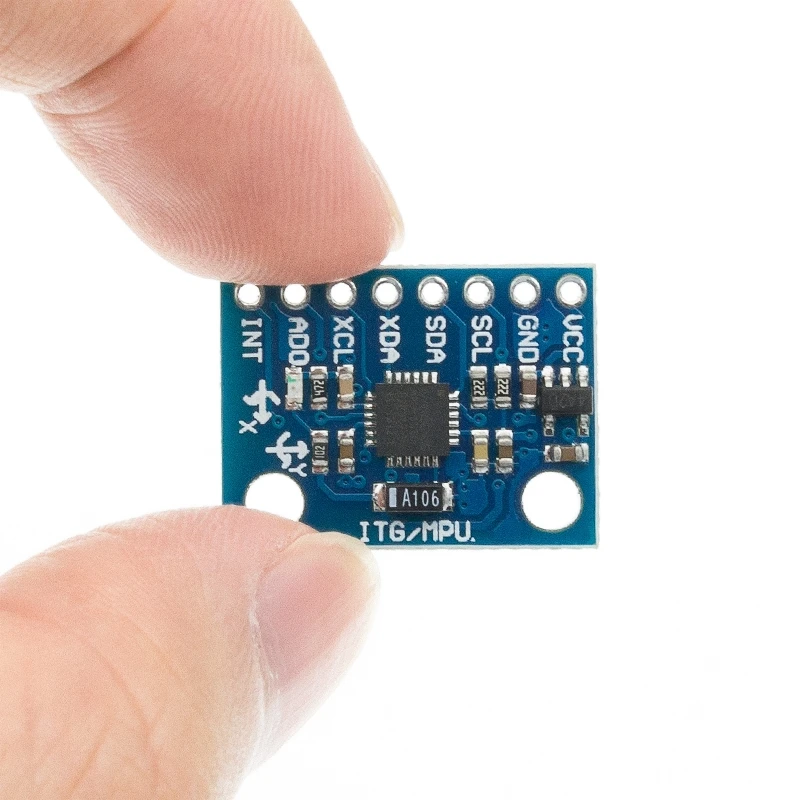
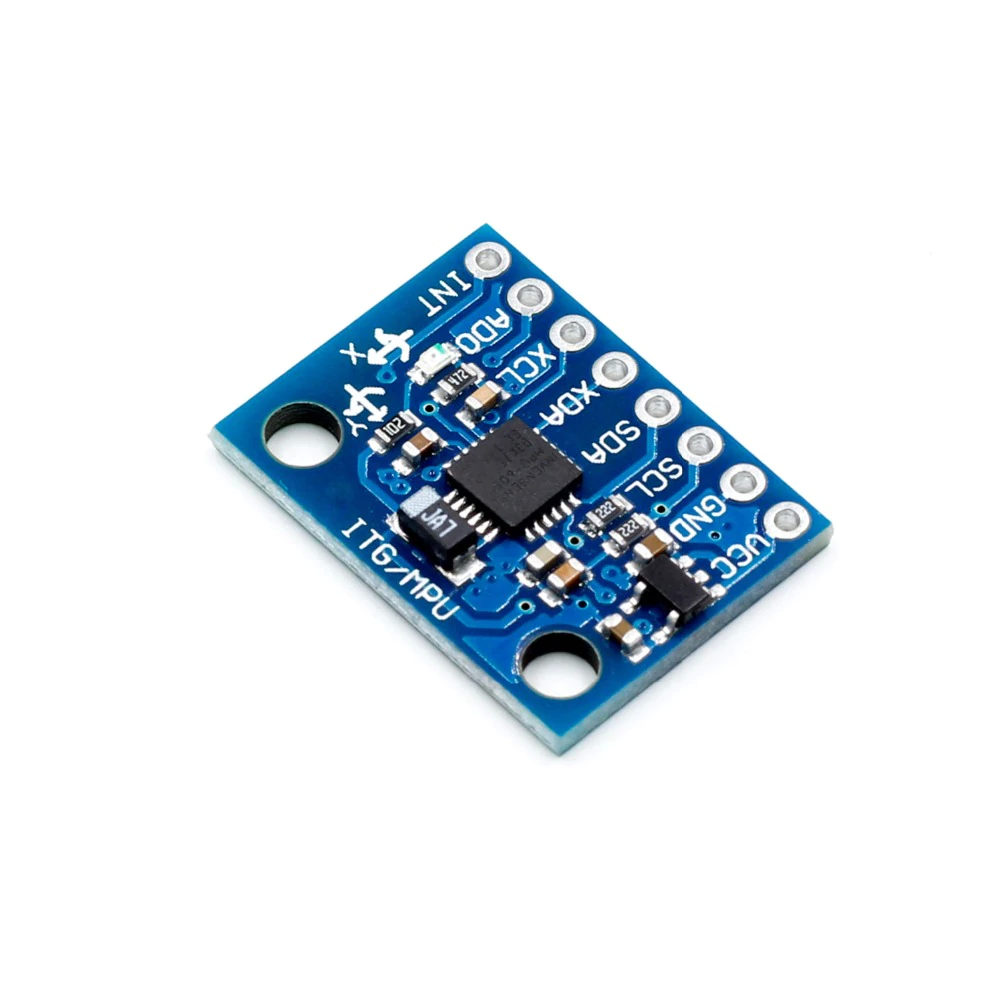
Купить MPU6050 MPU-6050 GY-521 3-х осевой аналоговый гироскопический датчик + 3...
The Three Axis Acceleration + Gyro Breakout (MPU-6050) - отличный модуль обработки движения. Благодаря сочетанию 3-осевого гироскопа MEMS и 3-осевого акселерометра на одном кремниевом кристалле вместе со встроенным процессором Digital Motion Processor ™ (DMP ™), способным обрабатывать сложные 9-осевые алгоритмы MotionFusion, MPU-6050 устраняет перекрестную -проблемы соосности осей, которые могут выползать на отдельные детали.
Он очень точный, так как содержит 16-битное оборудование для аналого-цифрового преобразования для каждого канала. Поэтому он одновременно захватывает каналы x, y и z. Датчик использует шину I2C для взаимодействия с Arduino.
Поэтому он одновременно захватывает каналы x, y и z. Датчик использует шину I2C для взаимодействия с Arduino.
Коммутационная плата для MPU-6050 позволяет легко использовать этот крошечный пакет QFN в вашем проекте. Выведены все контакты, которые вам нужно запустить, включая вспомогательную главную шину I2C, которая позволяет MPU-6050 получать доступ к внешним магнитометрам и другим датчикам. Встроенный чип LDO позволяет подключать к плате микроконтроллеры 5V и 3V3 без использования переключателей уровня.
Характеристики:
- Встроенный микропроцессор - 6050 интегрированный 6-осевой чип обработки движения
- Встроенный чип LDO, поддержка входного напряжения 5 В / 3,3 В
- Обычно используемый контакт был сломан со стандартным 2,54 расстояние в мм
- Поддержка модуля стандартным протоколом связи IIC
- Пользователи могут управлять программой датчика полной сетки ускорителя в диапазоне ± 2g, ± 4g, ± 8g и ± 16g
- Полный диапазон измерения угловой скорости для ± 250, ± 500, ± 1000 и ± 2000 dps
- Digital Motion Processing ™ (DMP ™) разгружает сложную MotionFusion, синхронизацию времени датчика и обнаружение жестов.
