
1 Ответ
- ПЧ
- Скалярное управление
- АД
14.12.2022
- Отвеченный вопрос
- 13.12.2022
Другое, Математика и статистика, Цифровая обработка сигналов
Здравствуйте. Подскажите пожалуйста как (и можно ли вообще) решить систему квадратных уравнений. eqn1=(x-y)/(A0-x-y)/(m0-x-2*y)==K1; eqn2=y/(x-y)/(m0-x-2*y)==K2; То есть выразить переменные x и y чер…
Здравствуйте. Подскажите пожалуйста как (и можно ли вообще) решить систему квадратных уравнений. eqn1=(x-y)/(A0-x-y)/(m0-x-2*y)==K1; eqn2=y/(x-y)/(m0-x-2*y)==K2; То есть выразить переменные x и y чер…
5 Ответов
- Публикация
- 07.12.2022
Электропривод и силовая электроника
Наша команда представила решение для электроэнергетической отрасли на базе КПМ РИТМ.
В очередной раз мы провели демонстрацию работы стенда с терминалами РЗиА (ВАЖНО! – мы не занимаемся рекламой сипротеков, на их месте может быть любой терминал, в том числе и В.
На прошлой неделе прошел международный форум «Электрические сети», который объединил десятки ведущих представителей профессионального сообщества электроэнергетики, а также задал вектор развития для внедрения новых прорывных технологий.
- Электропривод
- электроэнергетика
07.12.2022
- Публикация
- 07.12.2022
Робототехника и беспилотники
В докладе будет рассказано о применении алгоритмов обучения с подкреплением к различным задачам: от простых игровых задач до задачи навигации мобильного робота. Также будут представлены результаты сравнения различных алгоритмов в задачах избежания столкновения…
Приглашаем на вебинар «Обучение с подкреплением: от игр к реальным задачам», который пройдет 13 декабря в 10:00.
В настоящее время технологии обучения с подкреплением активно применяются во многих сферах: от ритейла до автономных транспортных средств. Может быть лучше: основной сложностью этого подхода является отсутствие размеченных данных, и, к сожалению, нет формализованного подхода как данные могут быть размечены для этой задачи.
- MATLAB
- Simulink
- САУ
- МОП
- Модельно ориентированное проектирование
- Искусственный интеллект
07.12.2022
- вопрос
- 07.12.2022
Системы связи, Цифровая обработка сигналов, ПЛИС и СнК, Другое
Здравствуйте! У меня вопрос по поводу дифференциальной квадратурной фазовой модуляции (DQPSK), которая применяется в стандарте связи TETRA. Мне необходимо построить сигнал с данной модуляцией и…
Здравствуйте! У меня вопрос по поводу дифференциальной квадратурной фазовой модуляции (DQPSK), которая применяется в стандарте связи TETRA. Мне необходимо построить сигнал с данной модуляцией и…
13 Ответов
- вопрос
- 07.
 12.2022
12.2022
 12.2022
12.2022Изображения и видео, Математика и статистика, Автоматизация испытаний, Другое
Добрый день, мне нужно выполнить в матлаб вычитание постоянного наклона для изображения, полученного атомно-силовым микроскопом. Изображение представляет собой квадратную матрицу. Для этого требуется…
Добрый день, мне нужно выполнить в матлаб вычитание постоянного наклона для изображения, полученного атомно-силовым микроскопом. Изображение представляет собой квадратную матрицу. Для этого требуется…
6 Ответов
- вопрос
- 06.12.2022
Математика и статистика, Системы управления, Изображения и видео, Робототехника и беспилотники, Глубокое и машинное обучение(ИИ)
Коллеги, добрый день. Как правильно орудоватьть fprintf, чтобы получить лог-файл следующего вида дата tab событие дата tab событие …. Я прорбую вот так: fid1=fopen(fullfile(app….
Коллеги, добрый день.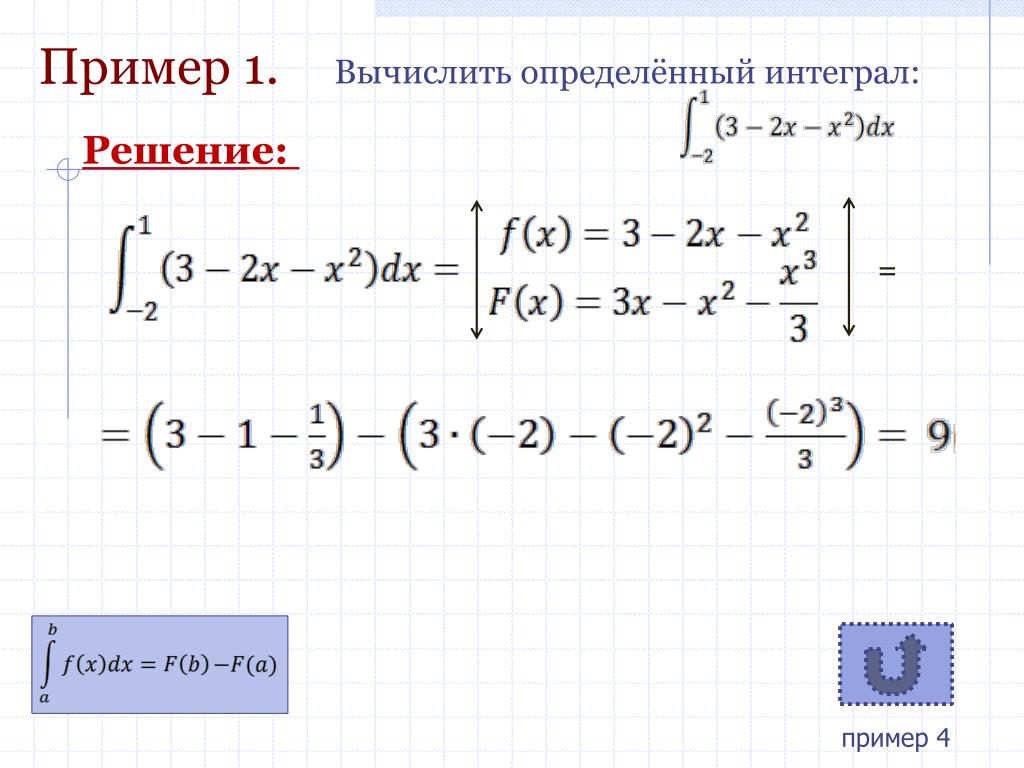 Как правильно орудоватьть fprintf, чтобы получить лог-файл следующего вида
дата tab событие
дата tab событие
….
Я прорбую вот так:
fid1=fopen(fullfile(app….
Как правильно орудоватьть fprintf, чтобы получить лог-файл следующего вида
дата tab событие
дата tab событие
….
Я прорбую вот так:
fid1=fopen(fullfile(app….
1 Ответ
- вопрос
- 05.12.2022
Системы управления, Изображения и видео, Робототехника и беспилотники, Глубокое и машинное обучение(ИИ), Другое
Дорогой, hub/exponenta/ подсткажите, пожалуйста, есть ли какая-нибудь разница при запуске в среде Апп дизайнера и откомпелировангого проекта? В среде Апп дизайнера файл создается с помощью функ…
Дорогой, hub/exponenta/ подсткажите, пожалуйста, есть ли какая-нибудь разница при запуске в среде Апп дизайнера и откомпелировангого проекта? В среде Апп дизайнера файл создается с помощью функ…
1 Ответ
- вопрос
- 05.12.2022
Системы управления, Робототехника и беспилотники, Математика и статистика, Верификация и валидация, Встраиваемые системы, Автоматизация испытаний, Изображения и видео, Цифровая обработка сигналов, Другое
Здравствуйте, никак не пойму как нужно соединить блоки, чтобы построить систему.
Здравствуйте, никак не пойму как нужно соединить блоки, чтобы построить систему. Пожалуйста помогите, спасибо. Задание. Моделирование работы магазина.Требуется промоделировать работу небольшого магази…
- вопрос
- 04.12.2022
Другое
У вас на сайте была переведенная на русский документация MATLAB? Не могу найти.
У вас на сайте была переведенная на русский документация MATLAB? Не могу найти.
4 Ответа
05. Абсолютная и условная сходимость несобственных интегралов по бесконечному промежутку
Если наряду с собственным интегралом по бесконечному промежутку Сходится и интеграл по этому же промежутку, то первый интеграл называется Абсолютно сходящимся.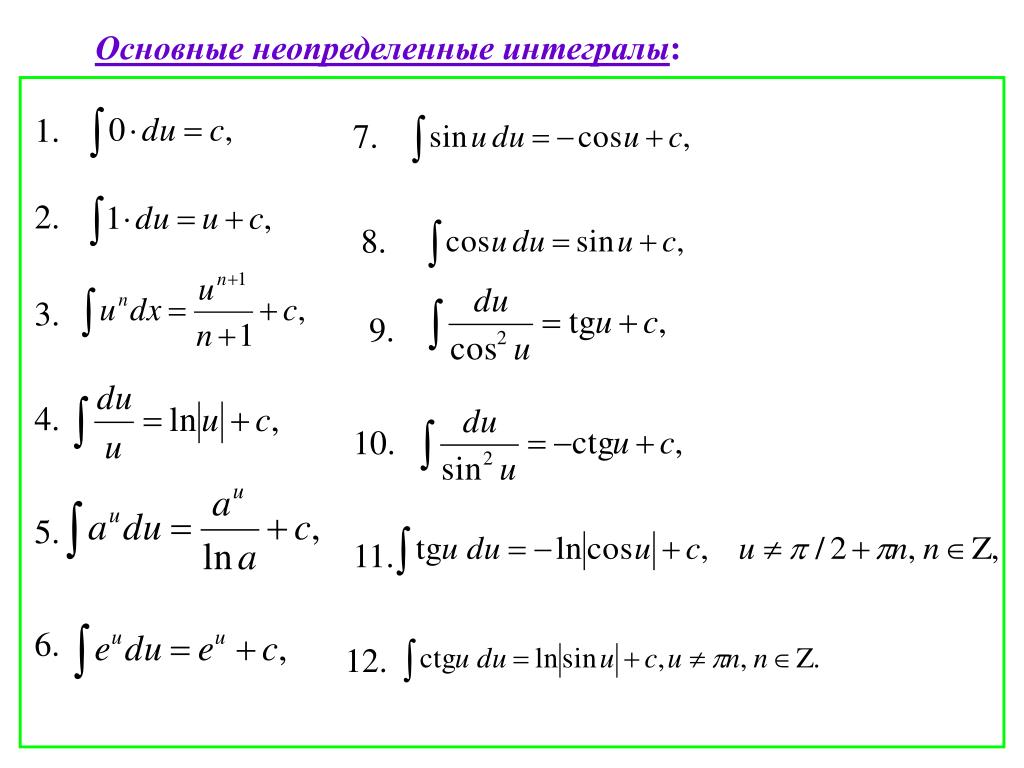
Если интеграл Сходится, а интеграл расходится, то первый интеграл называется Условно сходящимся.
Пример 8. Исследовать на абсолютную сходимость интеграл: .
Решение. В начале исследуется данный интеграл вообще на сходимость, для чего проведем интегрированние по частям: пусть тогда , далее . Так как последний интеграл сходится, то по признаку сравнения сходится и интеграл , причем абсолютно. Исходный интеграл при этом является сходящимся (кстати, сходимость этого можно определить быстрее с помощью признака сходимости Дирихле, который будет рассмотрен позже). Чтобы исследовать исходный интеграл на абсолютную сходимость, надо рассмотреть интеграл: . Так как при , то имеем: . Интеграл аналогично исходному интегралу сходится, а интеграл расходится; стало быть, и интеграл является расходящимся. При этом исходный интеграл является условно сходящимся.
Упражнение 8. Установить условную сходимость интеграла: .
Пример 9.

Решение:
; стало быть, интеграл сходится абсолютно.
Упражнение 9. Установить абсолютную сходимость интеграла: .
Установить условную сходимость при отсутствии абсолютной сходимости в ряде случаев позволяет так называемый Признак сходимости Дирихле, в котором исследуется структура подынтегральной функции, если ее можно представить в виде произведения двух функций, а именно: , где интегрируема и ограничена, то есть:
(7) ;
А функция при непрерывно дифференцируема и монотонна, причем:
(8) .
При выполнении условий, налагаемых на функции и интеграл
(9)
Сходится.
С помощью этого признака условную сходимость интеграла в примере 8 при отсутсвии абсолютной сходимости можно определить следующим образом:
Имеем интеграл , который не является абсолютно сходящимся.
Представим подынтегральную функцию этого интеграла в виде произведения двух функций, то есть: , где , а . Функция интегрируема и ограничена на бесконечном промежутке, так как: , а .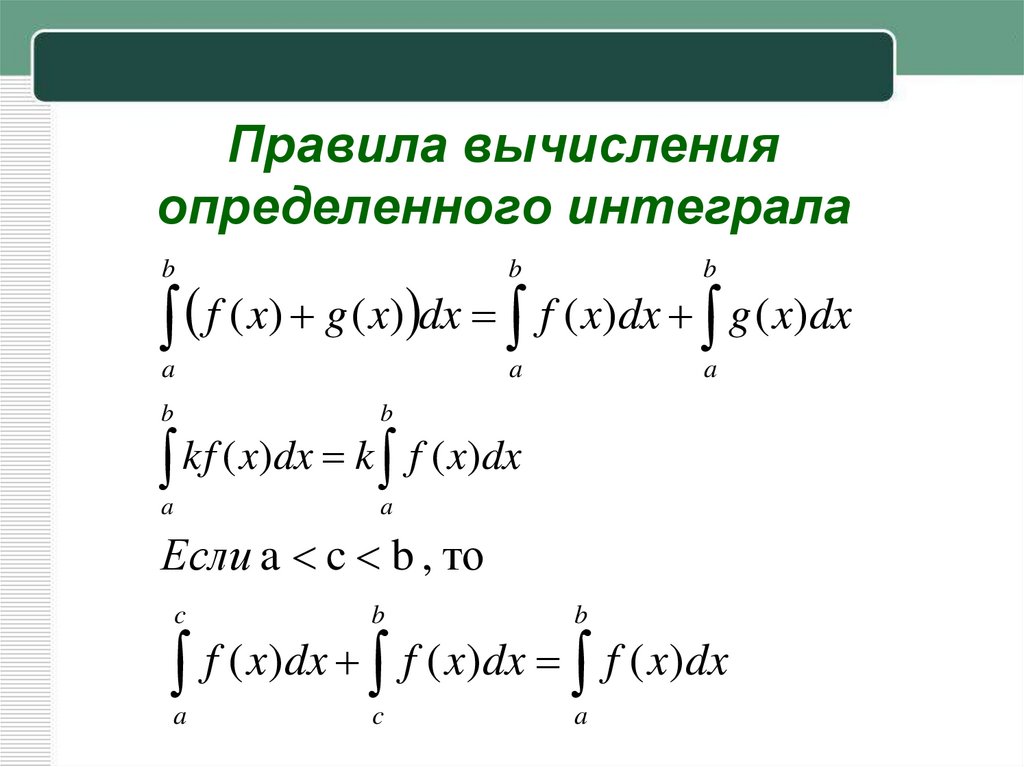 Поскольку все условия признака Дирихле (Формулы (7) И (8)) выполнены, то исследуемый интеграл сходится условно, ибо абсолютная сходимость этого интеграла места не имеет, что было показано в примере 8.
Поскольку все условия признака Дирихле (Формулы (7) И (8)) выполнены, то исследуемый интеграл сходится условно, ибо абсолютная сходимость этого интеграла места не имеет, что было показано в примере 8.
Пример 10. Исследовать на абсолютную и условную сходимость интеграл:
Решение. Сначала сделаем в исследуемом интеграле замену переменной:
Пусть , тогда ; если ; если ; итак, имеем: где является функцией интегрируемой и ограниченной на бесконечном промежутке (формула (7)), а (выполняется формула (8)). Поскольку все условия признака Дирихле (формулы (7) и (8)) выполнены, то исследуемый интеграл сходится. Исследуем интеграл на абсолютную сходимость, для чего рассмотрим интеграл . Т. к. при , то . Интеграл сходится по признаку Дирихле, а интеграл расходящийся; стало быть, интеграл тоже расходящийся, при этом исследуемый интеграл сходится условно.
Упражнение 10. Установить условную сходимость интегралов Фронеля:
; .
Интеграл типа (9) можно исследовать на условную сходимость ещё и с помощью так называемого Признака сходимости Абеля, в котором так же исследуется структура подынтегральной функции, если её можно представить в виде произведения двух функций и , на которые теперь наклкдываются следующие ограничения: интеграл от функции по бесконечному промежутку, то есть:
(10)
Сходится, а функция при непрерывно дифференциируема, монотонна и непрерывна, а потому имеет конечный предел, то есть:
(11) , .
При выполнении указанных условий ((10) и (11)) интеграл типа (9) сходится.
Пример 11. Установить сходимость интеграла: , используя признак Абеля.
Решение. Исследуемый интеграл представим следующим образом: , где , а . Так как интеграл от функции по бесконечному промежутку сходится (см. пример (8)), а , то все условия признака Абеля выполнены; стало быть, исследуемый интеграл сходящийся. Характер сходимости исходного итеграла (сходится условно или абсолютно) определится после исследования данного интеграла на абсолютную сходимость, для чего надо исследовать интеграл: . Так как , то .
Так как , то .
Интеграл сходится по признаку Дирихле, так как , а . Интеграл расходится, что можно установить по предельному признаку сравнения: при ; тогда в кочестве сопоставляемой функции имеем , а , что означает расходимость интеграла . Стало быть, интеграл тоже расходящийся. Теперь ясен и характер сходимости исходного интеграла : он сходится условно.
Упражнение 11. Исследовать характер сходимости интеграла: .
| < Предыдущая | Следующая > |
|---|
Исчисление III – Линейные интегралы
Показать мобильное уведомление Показать все примечания Скрыть все примечания
Мобильное уведомление
Похоже, вы находитесь на устройстве с «узкой» шириной экрана ( т. е. вы, вероятно, на мобильном телефоне). Из-за характера математики на этом сайте лучше всего просматривать в ландшафтном режиме. Если ваше устройство не находится в ландшафтном режиме, многие уравнения будут отображаться сбоку вашего устройства (должна быть возможность прокрутки, чтобы увидеть их), а некоторые пункты меню будут обрезаны из-за узкой ширины экрана.
е. вы, вероятно, на мобильном телефоне). Из-за характера математики на этом сайте лучше всего просматривать в ландшафтном режиме. Если ваше устройство не находится в ландшафтном режиме, многие уравнения будут отображаться сбоку вашего устройства (должна быть возможность прокрутки, чтобы увидеть их), а некоторые пункты меню будут обрезаны из-за узкой ширины экрана.
Раздел 16.2: Линейные интегралы – Часть I
В этом разделе мы собираемся представить новый вид интеграла. Однако, прежде чем мы это сделаем, важно отметить, что вам нужно будет помнить, как параметризовать уравнения, или, другими словами, вам нужно будет уметь записывать набор параметрических уравнений для данной кривой. Вы должны были видеть некоторые из них в своем курсе исчисления II. Если вам нужен обзор, вы должны вернуться и просмотреть некоторые основы параметрических уравнений и кривых.
Вот некоторые из наиболее простых кривых, которые нам нужно знать, как сделать, а также ограничения на параметры, если они потребуются.
В последнем мы дали как векторную форму уравнения, так и параметрическую форму, и если нам нужна двумерная версия, мы просто опускаем компоненты \(z\). На самом деле, в этом разделе мы будем использовать двумерную версию.
Для эллипса и окружности мы дали две параметризации, одна из которых описывает кривую по часовой стрелке, а другая против часовой стрелки. Как мы в конечном итоге увидим, направление, в котором прослеживается кривая, может иногда изменить ответ. Кроме того, оба они «начинаются» на положительной оси \(x\) в точке \(t = 0\).
Теперь перейдем к линейным интегралам. В исчислении I мы интегрировали \(f\left(x\right)\), функцию одной переменной, по интервалу \(\left[{a,b} \right]\). В этом случае мы думали, что \(x\) принимает все значения в этом интервале, начиная с \(a\) и заканчивая \(b\). С линейными интегралами мы начнем с интегрирования функции \(f\left({x,y} \right)\), функции двух переменных и значений \(x\) и \(y\), которые мы будем использовать точки \(\left( {x,y} \right)\), которые лежат на кривой \(C\). Обратите внимание, что это отличается от двойных интегралов, с которыми мы работали в предыдущей главе, где точки выходят из некоторой двумерной области.
Обратите внимание, что это отличается от двойных интегралов, с которыми мы работали в предыдущей главе, где точки выходят из некоторой двумерной области.
Начнем с кривой \(C\), от которой исходят точки. Будем считать, что кривая гладкая (определена кратко) и задана параметрическими уравнениями
\[x = h\left( t \right)\hspace{0.25in}y = g\left( t \right)\hspace{0.25in}\,\,\,\,a \le t \le b\ ]
Нам часто нужно записать параметризацию кривой в виде векторной функции. В этом случае кривая задается как
\[\vec r\left( t \right) = h\left( t \right)\,\vec i + g\left( t \right)\vec j\hspace{0.25in}\hspace{0.25in} а \ле т \ле б\]
Кривая называется гладкой , если \(\vec r’\left( t \right)\) непрерывна и \(\vec r’\left( t \right) \ne 0\) для всех \( т\).
линейный интеграл от \(f\left({x,y} \right)\) вдоль \(C\) обозначается как
\[\int\limits_{C}{{f\left( {x,y} \right)\,ds}}\]
Мы используем \(ds\) здесь, чтобы подтвердить тот факт, что мы движемся вдоль кривой \(C\), а не по оси \(x\) (обозначаемой как \(dx\)) или \(y\)-ось (обозначается \(dy\)). Из-за \(ds\) это иногда называют 92} = 16\), прочерченных против часовой стрелки.
Из-за \(ds\) это иногда называют 92} = 16\), прочерченных против часовой стрелки.
Показать решение
Сначала нам нужна параметризация круга. Это дано,
\[x = 4\cos t\hspace{0,25 дюйма}y = 4\sin t\]
Теперь нам нужен диапазон \(t\), который даст правую половину круга. Следующий диапазон \(t\) сделает это.
\[ – \frac{\pi }{2} \le t \le \frac{\pi }{2}\] 9{\ frac {\ pi} {2}} \\ & = \ frac {{8192}} {5} \ end {align *} \]
Далее нужно поговорить о линейных интегралах по кусочно-гладким кривым . Кусочно-гладкая кривая — это любая кривая, которую можно записать в виде объединения конечного числа гладких кривых, \({C_1}\),…,\({C_n}\), где конечная точка \({C_i}\ ) является отправной точкой \({C_{i + 1}}\). Ниже приведена иллюстрация кусочно-гладкой кривой.
Вычисление линейных интегралов по кусочно-гладким кривым относительно просто. Все, что мы делаем, это оцениваем линейный интеграл по каждой из частей, а затем складываем их. Линейный интеграл для некоторой функции по приведенной выше кусочной кривой будет равен 93}\,ds}}\\ & = – 16 + 2,268 + 8\\ & = – 5,732\end{align*}\]
Обратите внимание, что в приведенном выше примере мы поместили стрелки направления на кривую. Направление движения по кривой может изменить значение линейного интеграла, как мы увидим в следующем разделе. Также обратите внимание, что кривую можно рассматривать как кривую, которая ведет нас от точки \(\left( {- 2, – 1} \right)\) к точке \(\left( {1,2} \right) \). Давайте сначала посмотрим, что произойдет с линейным интегралом, если мы изменим путь между этими двумя точками. 93}\,ds}}\) где \(C\) — отрезок от \(\left( { – 2, – 1} \right)\) до \(\left( {1,2} \right )\).
Показать решение
Из формул параметризации в начале этого раздела мы знаем, что отрезок, начинающийся в \(\left( { – 2, – 1} \right)\) и заканчивающийся в \(\left( {1,2} \справа)\) определяется как,
\[\begin{align*}\vec r\left( t \right) & = \left( {1 – t} \right)\left\langle { – 2, – 1} \right\rangle + t\left \langle {1,2} \right\rangle \\ & = \left\langle { – 2 + 3t, - 1 + 3t} \right\rangle \end{align*}\]
91\\ & = 12\sqrt 2 \left( { – \frac{5}{4}} \right)\\ & = – 15\sqrt 2 = – 21. 213\end{align*}\]
213\end{align*}\]
При выполнении этих интегралов не забывайте о простых заменах Calc I, чтобы избежать таких действий, как вычисление члена в кубе. Выделить его не так сложно, но это больше работы, чем простая замена.
Таким образом, предыдущие два примера предполагают, что если мы изменим путь между двумя точками, то значение линейного интеграла (относительно длины дуги) изменится. Хотя это будет происходить довольно регулярно, мы не можем предполагать, что это будет происходить всегда. В следующем разделе мы рассмотрим эту идею более подробно. 93}\,ds}}\) где \(C\) — отрезок от \(\left( {1,2} \right)\) до \(\left( { – 2, – 1} \right )\).
Показать решение
С точки зрения работы этот не сильно отличается от предыдущего примера. Вот параметризация кривой.
\[\begin{align*}\vec r\left( t \right) & = \left( {1 – t} \right)\left\langle {1,2} \right\rangle + t\left\langle { – 2, – 1} \right\rangle \\ & = \left\langle {1 – 3t,2 – 3t} \right\rangle \end{align*}\]
91\\ & = 12\sqrt 2 \left( { – \frac{5}{4}} \right)\\ & = – 15\sqrt 2 = – 21. 213\end{align*}\]
213\end{align*}\]
Получается, что при изменении направления кривой линейный интеграл (относительно длины дуги) не изменится. Это всегда будет верно для таких линейных интегралов. Однако есть и другие виды линейных интегралов, в которых это не так. Мы увидим больше примеров этого в следующих нескольких разделах, так что не вбивайте себе в голову, что изменение направления никогда не изменит значение линейного интеграла.
Прежде чем работать с другим примером, давайте несколько формализуем эту идею. Предположим, что кривая \(C\) имеет параметризацию \(x = h\left( t \right)\), \(y = g\left( t \right)\). Предположим также, что начальная точка кривой — \(A\), а конечная точка кривой — \(B\). Параметризация \(x = h\left( t \right)\), \(y = g\left( t \right)\) затем определит ориентацию для кривой, где положительное направление – это направление, которое прослеживается по мере увеличения \(t\). В заключение,
пусть \(-C\) будет кривой с теми же точками, что и \(C\), однако в этом случае кривая имеет \(B\) в качестве начальной точки и \(A\) в качестве конечной точки, снова \ (t\) увеличивается по мере того, как мы пересекаем эту кривую. Другими словами, если задана кривая \(C\), кривая \(-C\) является той же кривой, что и \(C\), за исключением того, что направление было изменено на противоположное.
Другими словами, если задана кривая \(C\), кривая \(-C\) является той же кривой, что и \(C\), за исключением того, что направление было изменено на противоположное.
Тогда мы имеем следующий факт о линейных интегралах по длине дуги.
Факт
\[\int\limits_{C}{{f\left( {x,y} \right)\,ds}} = \int\limits_{{ – C}}{{f\left( {x,y} \справа)\,дс}}\]
Итак, для линейного интеграла по длине дуги мы можем изменить направление кривой, но не менять значение интеграла. Это полезно помнить, так как некоторые линейные интегралы будут проще в одном направлении, чем в другом.
92},\,\,\, – 1 \le x \le 1\)Показать все решения Скрыть все решения
Показать обсуждение
Прежде чем работать с любым из этих линейных интегралов, заметим, что все эти кривые являются путями, соединяющими точки \(\left( { – 1,1} \right)\) и \(\left( {1,1} \ правильно)\). Также обратите внимание, что \({C_3} = – {C_2}\) и, следовательно, по факту выше эти два должны давать один и тот же ответ. 91 = 0\]
Также обратите внимание, что \({C_3} = – {C_2}\) и, следовательно, по факту выше эти два должны давать один и тот же ответ. 91 = 0\]
b \({C_2}\): сегмент линии от \(\left( { – 1,1} \right)\) до \(\left( {1,1} \right)\). Показать решение
Здесь для этой кривой можно использовать две параметризации. Первый — использовать формулу, которую мы использовали в предыдущих примерах. Эта параметризация
\[\begin{align*}{C_2}:\vec r\left( t \right) & = \left( {1 – t} \right)\left\langle { – 1,1} \right\rangle + t\left\langle {1,1} \right\rangle \\ & \hspace{0.25in}\,\,{\kern 1pt} = \left\langle {2t – 1,1} \right\rangle \end {выровнять*}\]
для \(0 \le t \le 1\).
Иногда у нас нет другого выбора, кроме как использовать эту параметризацию. Однако в этом случае есть вторая (вероятно) более легкая параметризация. Второй использует тот факт, что мы на самом деле просто рисуем часть линии \(y = 1\). Используя это параметрирование,
Используя это параметрирование,
\[{C_2}:x = t,\,\,y = 1,\,\,\, – 1 \le t \le 1\]
Это будет гораздо более простая параметризация, поэтому мы будем использовать ее. Вот линейный интеграл для этой кривой. 91 = 0\]
Обратите внимание, что на этот раз, в отличие от линейного интеграла, с которым мы работали в примерах 2, 3 и 4, мы получили одно и то же значение интеграла, несмотря на то, что пути разные. Это будет происходить при случае. Мы также не должны ожидать, что этот интеграл будет одинаковым для всех путей между этими двумя точками. На данный момент все, что мы знаем, это то, что для этих двух путей линейный интеграл будет иметь одинаковое значение. Вполне возможно, что между этими двумя точками есть другой путь, который даст другое значение линейного интеграла.
c \({C_3}\): сегмент линии от \(\left( {1,1} \right)\) до \(\left( { – 1,1} \right)\). Показать решение
Показать решение
Теперь, согласно нашему факту выше, нам действительно не нужно ничего здесь делать, так как мы знаем, что \({C_3} = – {C_2}\). Факт говорит нам, что этот линейный интеграл должен быть таким же, как и вторая часть (, т.е. нулей). Тем не менее, давайте проверим это, плюс здесь нужно сделать замечание о параметризации.
Вот параметризация этой кривой.
\[\begin{align*}{C_3}:\vec r\left( t \right) & = \left( {1 – t} \right)\left\langle {1,1} \right\rangle + t \left\langle { – 1,1} \right\rangle \\ & \hspace {0.25in}\,\,{\kern 1pt} = \left\langle {1 – 2t,1} \right\rangle \end {выровнять*}\]
для \(0 \le t \le 1\).
Обратите внимание, что на этот раз мы не можем использовать вторую параметризацию, которую мы использовали в части (b), поскольку нам нужно двигаться справа налево по мере увеличения параметра, а вторая параметризация, использованная в предыдущей части, будет двигаться в противоположном направлении. . 91 = 0\]
. 91 = 0\]
Конечно, мы получили тот же ответ, что и во второй части.
До сих пор в этом разделе мы рассматривали только линейные интегралы по двумерной кривой. Однако нет причин так себя ограничивать. Мы также можем выполнять линейные интегралы по трехмерным кривым.
Предположим, что трехмерная кривая \(C\) задана параметризацией,
\[x = x\left( t \right),\,\hspace{0.25in}y = y\left(t\right)\hspace{0.25in}z = z\left(t\right)\hspace{ 0,25 дюйма}a \le t \le b\] 92}} \,дт}}\]
Обратите внимание, что часто при работе с трехмерным пространством параметризация задается векторной функцией.
\[\vec r\left( t \right) = \left\langle {x\left( t \right),y\left( t \right),z\left( t \right)} \right\rangle \ ]
Обратите внимание, что мы немного изменили обозначение параметризации. Поскольку мы редко используем имена функций, мы просто сохранили \(x\), \(y\) и \(z\) и добавили к части \(\left( t \right)\), чтобы обозначить, что они могут быть функциями параметра. 9{{\,b}}{{f\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\,\,\left \| {\ vec r ‘\ влево ( т \ вправо)} \ вправо \ | \, dt}} \]
9{{\,b}}{{f\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\,\,\left \| {\ vec r ‘\ влево ( т \ вправо)} \ вправо \ | \, dt}} \]
Итак, за исключением добавления третьего параметрического уравнения, линейные интегралы в трехмерном пространстве работают так же, как и в двумерном пространстве. Давайте рассмотрим быстрый пример.
Пример 6. Вычислить \(\displaystyle \int\limits_{C}{{xyz\,ds}}\), где \(C\) — спираль, заданная выражением \(\vec r\left( t \right) = \ влево \ langle {\ cos \ влево ( t \ вправо), \ sin \ влево ( t \ вправо), 3t} \ вправо \ rangle \), \ (0 \ le t \ le 4 \ pi \). 9{4\pi }\\ & = – 3\sqrt {10} \,\pi \end{align*}\]
Вы смогли сделать это неотъемлемое право? Требовалось интегрирование по частям.
Итак, как мы видим, разницы между двухмерными и трехмерными линейными интегралами на самом деле не так уж и много.
Интегральное исчисление
Главная
Узнать
Исчисление
- Ограничения
- Непрерывность и разрыв
- Дифференциация или производные
- Теорема о цепном правиле
- Интеграция
- Применение интеграла
дифференциальное исчисление Ссылки
Интегрирование — это метод, используемый для нахождения функции, производная которой задана.
Прежде чем мы приступим к изучению интеграции, мы сначала обсудим различия переменных, которые будут полезны при разработке методов. методы, используемые для интеграции.
 Таким образом, это обратный процесс дифференциации.
Вот почему интеграцию также иногда называют анти-деривация .
Таким образом, это обратный процесс дифференциации.
Вот почему интеграцию также иногда называют анти-деривация .Пусть `f` будет дифференцируемой функцией в интервале `< x < b ,` и пусть она будет определена как
`у = е(х)`
затем
`δy = f(x+δx) – f(x)`
и
`lim δx → ` 0 ` δy/δx`=`lim δx → 0 (f(x + δx) – f(x))/δx`= ` f ‘(x) `
то есть
`dy/dx= f ‘(x)`
Мы знаем, что до достижения предела `δx → 0` выражение `δy/δx` отличается от `f'(x`) очень незначительно, назовем его `Ԑ`. Тогда мы можем написать
что
Тогда мы можем написать
что
`δy/δx=f ‘(x) + Ԑ`, где Ԑ очень мало
Или
`δy= f ‘(x) δx+ Ԑδx`
Здесь член `f ‘(x)δx` гораздо важнее члена `Ԑδx` и называется дифференциалом зависимой переменной `y` и обозначается `dy`.
Отсюда
`dy = f ‘(x) δx`
И
`dx = (x)’ δx= (1)δx = δx` 9-1 dx ` = `( 1 )/aln|ax + b | + c ` , `(ax + b) ≠ 0 `
11. `∫ tan (ax + b) dx` = ` ( 1 )/aln|sec (ax + b)| + c ` = ` –( 1 )/aln|cos(ax + b)| + c `
12. `∫ cot (ax + b) dx ` = ` ( 1 )/aln|sin(ax + b)| + c `
13. `∫ sec (ax + b) dx` = `( 1 )/aln|sec (ax + b) + tan (ax+b)| + c`
14. `∫ cosec (ax + b) dx ` = `( 1 )/aln| cosec (ax + b)– кроватка (ax+b)| + с`
Все эти формулы были представлены в наиболее обобщенном виде. Их конкретный случай, когда
`(ax + b) = x;` то есть `a = 1` и `b = 0`.
9x+ c` ` (a > 0, a ≠ 1)`
Их конкретный случай, когда
`(ax + b) = x;` то есть `a = 1` и `b = 0`.
9x+ c` ` (a > 0, a ≠ 1)`
10. ` ∫1/xdx=ln|x| + c ` , ` x ≠ 0`
11. ` ∫ tan ` x ` dx` = `ln|sec x| + c ` = ` – ln|cosx| + c`
12. ` ∫ cot ` x ` dx ` = `ln|sinx| + c`
13. ` ∫ sec ` x ` dx` = `ln|sec x + tan x| + c `
14. ` ∫ cosec ` x ` dx` = `ln| cosec `x` – раскладушка x| + с`
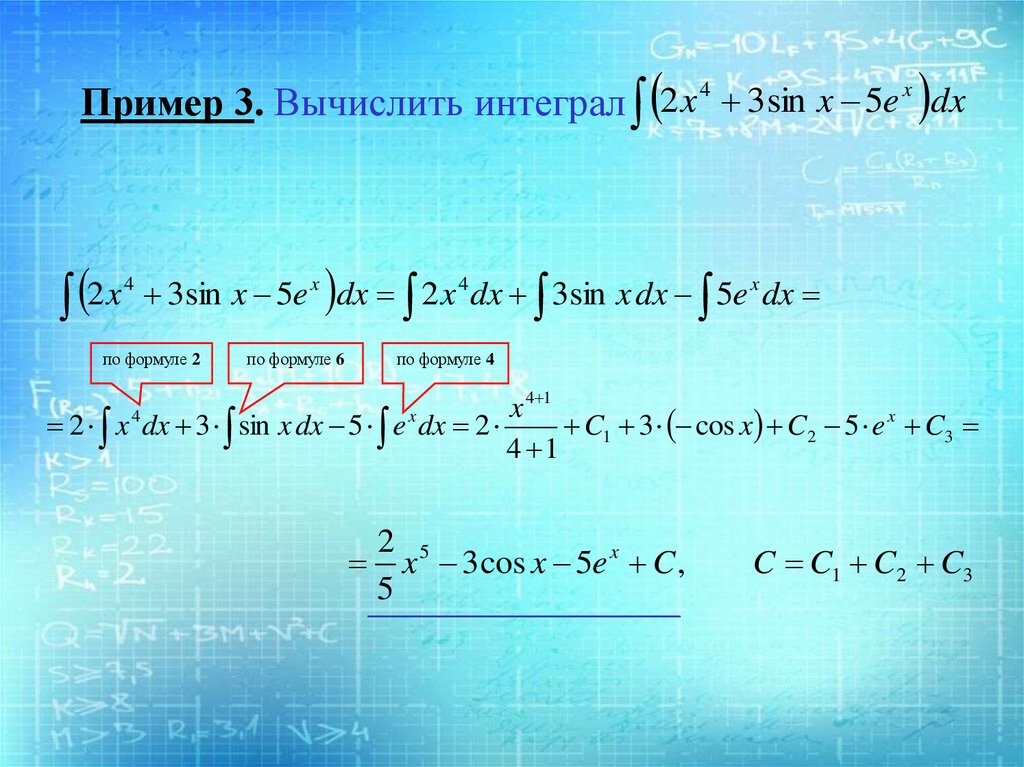
Теперь мы подошли к решению некоторых примеров интегралов, использующих эти формулы.
Пример 2:
Пример 3:
Во всех этих примерах и формулах `c` является константой интегрирования, и ее значение может быть оценено из начальных условий. Мы обсудим это позже в ближайшие темы.
Интеграл от произведения константы на функцию равен произведению константы на интеграл от функция. 9(-1)f ‘(x) dx ` = ` ln f(x) + c ` `( f(x) > 0 )`
Пример 4:
Пример 5:
Пример 6:
Мы используем технику подстановки всякий раз, когда возможно преобразовать интеграл в стандартную форму или в простой интеграл путем подходящей замены. переменной. Мы представляем несколько простых примеров, которые помогут вам лучше понять эту технику.
92 )`
переменной. Мы представляем несколько простых примеров, которые помогут вам лучше понять эту технику.
92 )`
`x = грех Θ`
`x = сек Θ`
`x = загар Θ`
`√(x+a) = t` `(или √(x-a) = t)`
`x – a = a sin Θ`
`х + а = сек Θ`
Пример:
Далее мы представляем простой метод интегрирования под названием “Интегрирование по частям”. Он включает в себя использование простой формулы, которая очень помогает при оценке комплексные интегралы.
Если и u, и v являются функциями некоторой общей переменной, скажем, x,
`∫u dv = uv -∫ v du`
Если
`u = f(x) и v = g(x)`
Тогда вышеуказанная формула может быть выражена как
`∫f(x) g'(x) dx ` = ` f(x) g(x)- ∫g(x) f ‘(x) dx + c `
Пример 1:
Пример 2:
Пример 3:
Если `P(x)` и `Q(x)` являются полиномиальными функциями и знаменатель `Q(x) ≠ 0` в рациональной функции `(P(x) )/(Q(x))` может быть разложить на линейные и квадратичные
факторов, то рациональная функция записывается в виде суммы более простых рациональных функций, каждая из которых может быть проинтегрирована уже известными нам способами.