
Подборка по базе: Классикалы_ механика_а кіріспе. Н_кте кинематикасы.doc, Абай Мадина, механика практика 3 апта.pdf, Абай Мадина , 3 апта, механика (тест және суретке анықтама).pdf, Лаба 1. Изучение вращательного движения на маятнике Обербека.doc, 7 сын Бұйымды жасау. Материалдар мен бөлшектерді механикалық өң, Ответы – РОСДИСТАНТ – Механика грунтов.docx, Техническая механика.djvu, Физика. Механика.pdf, Строительная механика_СТРбдо_2003в_Иванова Н.А._ПР3.docx, Теоретическая механика ДЗ Демин Д.С..pdf 1 2 3 ИЗД Механика поступательного и вращательного движения Вариант 1. 1.1. На графике показано изменение с течением времени ускорения точки на прямолинейном отрезке пути. Начальная скорость равна нулю, t1 = 12 c, a1 = 2 м/с2. Найти скорость точки в момент времени t2. 1.2. Уравнение вращения твердого тела . 1.3. Диск начинает вращаться под действием момента сил М, график временной зависимости которого представлен на рисунке. У кажите график, правильно отражающий зависимость момента импульса диска от времени.
1.5. Столб высотой h = 3,0 м и массой m= 50,0 кг из вертикального положения падает на землю. Определите момент импульса ИЗД Механика поступательного и вращательного движения 2 .2. На графике представлена параболическая зависимость угла φ поворота вращающегося тела от времени 2 .3. Две материальные точки массами расположены симметрично относительно оси , расположенной в плоскости чертежа. Как изменится момент инерции этих точек при повороте оси в плоскости чертежа на угол из положения в положение 2.4. Д ля того, чтобы раскрутить стержень массы m1 и длины l1 вокруг вертикальной оси, расположенной перпендикулярно стержню через его середину, до угловой скорости ω, необходимо совершить работу А1. Во сколько раз большую работу, чем А1, надо совершить, для того, чтобы раскрутить до той же угловой скорости стержень массы 2. ИЗД Механика поступательного и вращательного движения 3.1. Импульс тела 3.2. Частица движется по окружности радиусом R = 1 м в соответствии с уравнением , где – в радианах, t – в секундах. Найдите время движения диска до остановки. Сколько оборотов N сделает диск за это время? 3 . 3.5. Вентилятор вращается с частотой n0 = 900 об/мин. После выключения, вентилятор, вращаясь равнозамедленно, сделал до остановки N=75 об. Работа сил торможения А =44,4 Дж. Найдите момент инерции J вентилятора и момент сил торможения М ИЗД Механика поступательного и вращательного движения 4.1. Материальная точка движется вдоль оси ОX, зависимость ее координаты от времени имеет вид 4 .2. На рисунке приведен график зависимости проекции угловой скорости вращающегося тела на ось вращения от времени. 4 .3. На рисунке приведена зависимость модуля моментов сил, приложенных к разным телам, от модуля углового ускорения тел. Наибольший момент инерции имеет тело под номером…… 4.5. Два шарика одинаковой массы и одинаковыми радиусами движутся с одинаковыми скоростями центров масс по горизонтальной поверхности. Первое катится, второе скользит. При ударе о стенку тела останавливаются. Определите, у какого тела и во сколько раз больше выделится тепла при ударе. ИЗД Механика поступательного и вращательного движения 5.1. На рисунке представлен график зависимости проекции скорости от времени для прямолинейного движения тела. Ниже приведены четыре различных графика зависимости проекции ускорения от времени. Какой из этих графиков соответствует приведенной зависимости проекции ускорения от времени?
5 .3. На рисунке представлен график зависимости проекции вращательного момента силы, действующей на тело, от угла поворота. Чему равна работа сил, действующих на тело, при повороте его на угол 4 5 .4. На рисунке показан график зависимости потенциальной энергии Wpот координаты х. График зависимости проекции силы Fx от координаты х имеет вид … 5.5. Тонкий прямой стержень длинойl = 1 м прикреплен к горизонтальной оси, проходящий через его верхний конец. Стержень отклонили на 60º от положения равновесия и отпустили. ИЗД Механика поступательного и вращательного движения Вариант 6 6.1. Координаты материальной точки изменяются со временем по закону . Чему равен модуль радиус–вектора точки (в метрах) в момент времени t = 1 с (с округлением до десятых долей)? В какой плоскости движется точка? 6 .2. Диск радиуса Rд = 25 см начинает вращаться из состояния покоя в горизонтальной плоскости вокруг оси Z, проходящей перпендикулярно его плоскости через его центр. Зависимость проекции угловой скорости от времени показана на графике. На каком интервале времени тангенциальное ускорение точки, расположенной на расстоянии R = 20 см от центра диска, равно aτ = 0,2 м/с2? 6 .3. Из жести вырезали три одинаковые детали в виде эллипса. Две детали разрезали на четыре одинаковые части. Затем все части отодвинули друг от друга на одинаковое расстояние и расставили симметрично относительно оси ОО. 1) I12 3 ; 2) I1 = I23 ; 3) I12 = I3 ;4) I1 > I2 > I3 . 6.4. На рисунке представлен график зависимости кинетической энергии вращающегося тела от угла поворота φ. Как изменяется вращающий момент 6.5. Груз массой m = 0,1 кг привязали к нити длиной l = 1 м. Нить отвели от вертикали на угол α0 = 900 и груз отпустили. Каково центростремительное ускорение груза в момент, когда нить образует с вертикалью угол α = 600? Сопротивлением воздуха пренебречь. ИЗД Механика поступательного и вращательного движения 7.1. На рисунке представлен график зависимости проекции ускорения ах от времени t для материальной точки, движущейся вдоль оси ОХ. Начальная скорость движения точки V0х = –2 м/с.
7.5. Сплошной и полый шары, имеющие одинаковые массы и радиусы, скатываются без проскальзывания с горки высотой h. Какое из тел будет иметь большую скорость у основания горки и во сколько раз? ИЗД Механика поступательного и вращательного движения 8 .2. Диск радиуса R начинает вращаться из состояния покоя в горизонтальной плоскости вокруг оси Z, проходящей перпендикулярно его плоскости через его центр. Зависимость проекции угловой скорости от времени показана на графике. Чему равны тангенциальные ускорения точки на краю диска в моменты времени t1= 2 с и t2 = 7 с? r=1см r= 2 см r=3см r= 3 см 8 . 8.5. Если на верхний конец вертикально расположенной пружины положить груз, то пружина сожмется на ∆L1 = 3 мм. На сколько изменится длина пружины ∆L2, если тот же груз упадет на пружину с высоты h = 8 мм? ИЗД Механика поступательного и вращательного движения Определить силу нормальной реакции опоры действующей на тело ( в Н). 9 .2. Твердое тело вращается вокруг оси Z с угловым ускореньем, проекция которого изменяется во времени, как показано на графике. Определите, используя график, величину угловой скорости вращающегося тела в момент времени t = 1,5 c, если величина начальной скорости равна ω = -3 рад/с. 9 .3. На рисунке показаны начальная рад/с и конечная рад/с скорости вращения абсолютно твердого тела для интервала времени .Как направлен момент сил, вызывающий вращение данного тела? 9.4. Маховик в виде диска массой m = 80 кг и радиусом R =30 см находится в состоянии покоя. Какую работу А1 нужно совершить, чтобы сообщить маховику частоту n =10 c-1? Какую работу пришлось бы совершить, если бы при той же массе диск имел меньшую толщину, но вдвое больший радиус? 1 2 3 |

 1. Тело движется прямолинейно, причем скорость зависит от времени по закону: Vх = 3t3 – 10t + 2 (в м/с). Найти величину ускорения ах в момент времени t = 5 c.
1. Тело движется прямолинейно, причем скорость зависит от времени по закону: Vх = 3t3 – 10t + 2 (в м/с). Найти величину ускорения ах в момент времени t = 5 c. 5. Мальчик на санках спустился с ледяной горы. Коэффициент трения при его движении по горизонтальной поверхности равен μ = 0,2. Расстояние, которое мальчик проехал по горизонтали до остановки, равно l = 30 м. Чему равна высота горы? Считать, что по склону горы санки скользили без трения.
5. Мальчик на санках спустился с ледяной горы. Коэффициент трения при его движении по горизонтальной поверхности равен μ = 0,2. Расстояние, которое мальчик проехал по горизонтали до остановки, равно l = 30 м. Чему равна высота горы? Считать, что по склону горы санки скользили без трения.
 Как изменяется модуль вращающего момента сил, действующего на тело, на интервале времени от до ?
Как изменяется модуль вращающего момента сил, действующего на тело, на интервале времени от до ?
 Определите линейную скорость нижнего конца стержня в момент прохождения через положение равновесия
Определите линейную скорость нижнего конца стержня в момент прохождения через положение равновесия
 Проекция скорости Vх движущейся точки в момент времени 3 с равна …м/с.
Проекция скорости Vх движущейся точки в момент времени 3 с равна …м/с.
 4. На рисунке представлен график зависимости проекции вращательного момента силы, действующей на тело, от угла поворота. Чему равна работа сил, действующих на тело, при повороте его на угол 10 рад ?
4. На рисунке представлен график зависимости проекции вращательного момента силы, действующей на тело, от угла поворота. Чему равна работа сил, действующих на тело, при повороте его на угол 10 рад ?
Подборка по базе: _айырбаев _._. Классикалы_ механика негіздері.pdf, Классикалы_ механика_а кіріспе.  Н_кте кинематикасы.doc, Абай Мадина, механика практика 3 апта.pdf, Абай Мадина , 3 апта, механика (тест және суретке анықтама).pdf, Лаба 1. Изучение вращательного движения на маятнике Обербека.doc, 7 сын Бұйымды жасау. Материалдар мен бөлшектерді механикалық өң, Ответы – РОСДИСТАНТ – Механика грунтов.docx, Техническая механика.djvu, Физика. Механика.pdf, Строительная механика_СТРбдо_2003в_Иванова Н.А._ПР3.docx Н_кте кинематикасы.doc, Абай Мадина, механика практика 3 апта.pdf, Абай Мадина , 3 апта, механика (тест және суретке анықтама).pdf, Лаба 1. Изучение вращательного движения на маятнике Обербека.doc, 7 сын Бұйымды жасау. Материалдар мен бөлшектерді механикалық өң, Ответы – РОСДИСТАНТ – Механика грунтов.docx, Техническая механика.djvu, Физика. Механика.pdf, Строительная механика_СТРбдо_2003в_Иванова Н.А._ПР3.docxИЗД Механика поступательного и вращательного движения Вариант 18 1 8.1. На графике изображена зависимость координаты точки от времени. Какой график зависимости скорости от времени отвечает этому случаю? 1 8.2. Твердое тело начинает вращаться вокруг оси Z. Зависимость углового ускорения от времени представлени на графике ( рис.1). Соответствующая зависимость угловой скорости от времени представлена на рис.2 графиком под номером… 1 8.3. На рисунке изображено тело, имеющее ось вращения ОО1. На тело действуют две силы и , Вектора сил и ось расположены в плоскости рисунка. действуют две силы и , Вектора сил и ось расположены в плоскости рисунка. Про моменты и сил и относительно оси ОО1 можно утверждать следующее : 1) ; 2) ; 3) 4) ИЗД Механика поступательного и вращательного движения х = 2t2, м у =2t, м z = const, м. Запишите функцию Что представляет собой траектория, по которой движется точка? Чему равно ускорение точки в момент времени t = 3 с. 19.3. Маховик вращается вокруг по закону, выраженному уравнением φ = 2+16t–2t2, рад. Момент инерции маховика J = 50 кг∙м2. Найдите закон, по которому изменяется со временем вращающий момент М. Чему равна величина момента силы в момент времени t = 3с? 1 9.4. На рисунке приведен график зависимости угла поворота φ тела при вращательном движении от времени. 19.5 Кусок пластилина массой m = 200 г падает со скоростью V = 6 м/с, направленной под углом α = 600 к горизонту, на брусок массой m1 = 2m, двигающийся со скоростью V1 = V/2 по гладкой горизонтальной поверхности навстречу куску пластилина. Найти количество энергии, перешедшей в тепло Q при абсолютно неупругом ударе. ИЗД Механика поступательного и вращательного движения 20.2. Велосипедное колесо вращается с частотой n = 5 c-1. Под действием сил трения оно остановилось через интервал времени Δt = 1 мин. Определите угловое ускорение и число оборотов N, которое сделает колесо за это время. 20.4. На рисунке представлены графики зависимости мощности постоянного момента силы от времени . Тело вращается равнозамедленно. Какой график соответствует этому случаю? ИЗД Механика поступательного и вращательного движения 21.2.Колесо, угловое ускорение которого постоянно и равно ε = 2 рад/с2, поворачивается в течение t2 = 5 с на 75 радиан. Сколько времениt1 тело двигалось от начала вращения до начала этого пятиминутного интервала, если (в момент t = 0) перед началом движения оно покоилось. 2 1.4 Тело массы m, прикрепленное к пружине с жесткостью k, может без трения двигаться по горизонтальной поверхности (пружинный маятник). Какой из приведенных графиков соответствует зависимости кинетической энергии тела от величины его смещения из положения равновесия? Ответ обоснуйте. 2 1. ИЗД Механика поступательного и вращательного движения 2 2.2. На графике представлена зависимость угловой скорости ω тела, вращающегося вокруг неподвижной оси, от времени t. Напишите уравнение, верно отражающее зависимость угла поворота φ от времениt при условии, что угол поворота в момент времени был равен . 2 2.4. Два тела одинаковой массы соскальзывают без начальной скорости с вершин двух наклонных плоскостей, длины которых . Если , а коэффициенты трения тел о плоскости в обоих случаях одинаковы, то соотношение между работами силы трения и в обоих случаях следующее : 1) 2) 3) 4) среди ответов правильного нет Укажите номер правильного ответа и поясните его. ИЗД Механика поступательного и вращательного движения 23.4. Потенциальная энергия частицы задается функцией U = -6·x2yz. Найти величину компоненты Fx вектора силы (в Н), действующей на частицу в точке А (2, 3, 1). Функция U и координаты точки А заданы в единицах СИ 23.5. На рисунке показаны тела одинаковой м ассы и размеров, вращающиеся вокруг вертикальной оси с одинаковой частотой. 24.2. . Колесо радиусом R= 10 см вращается так, что зависимость угла поворота радиуса колеса от времени дается уравнением . Найдите, на сколько изменится тангенциальное ускорение за единицу времени для точек, лежащих на ободе колеса. 24.3. Модуль момента импульса вращающегося тела изменяется со временем по закону , где А = 1 кгм2с-1, В=2 кгм2с-3. 24.4. . Материальная точка массой m = 100 г начинает двигаться под действием силы . Чему равна мощность, развиваемая силой в момент времени 1с, если зависимость радиус-вектора материальной точки от времени имеет вид м? 24.5. О бруч массой m = 0.3кг и радиусом R = 0.5 м привели во вращение, сообщив ему энергию вращательного движения 1200 Дж, и отпустили на пол так, что его ось вращения оказалась параллельной плоскости пола., то Какую кинетическую энергию вращательного движения имел обруч, когда начал движение без проскальзывания, если сила трения совершила работу, равную 800Дж ? ИЗД Механика поступательного и вращательного движения х = 2t2, у = 2t, z = const. Траектория, по которой движется точка, представляет собой … 1) произвольную пространственную кривую 2) прямую линию в плоскости, параллельной плоскости ХОУ 3) эллипс, расположенный в плоскости, параллельной плоскости ХОУ 4) параболу в плоскости, параллельной плоскости ХОУ Укажите номер правильного ответа и поясните свой выбор. 2 5.4. На рисунке приведен график зависимости потенциальной энергии пружины от величины деформации х. Работа сил упругости при удлинении пружины от х1 = 0,1см до х2 = 0,2 см равна … 25. 1 2 3 |
 Про моменты и сил и относительно оси ОО1 можно утверждать следующее
Про моменты и сил и относительно оси ОО1 можно утверждать следующее 1 . Координаты материальной точки изменяются со временем по закону
1 . Координаты материальной точки изменяются со временем по закону Как изменяется кинетическая энергия тела в интервале времени от t1 до t2?
Как изменяется кинетическая энергия тела в интервале времени от t1 до t2?
 ..
.. 5.Обруч массой m = 0.3кг и радиусом R= 0.5 м привели во вращение, сообщив ему энергию вращательного движения 1200 Дж, и отпустили на пол так, что его ось вращения оказалась параллельной плоскости пола. Если обруч начал двигаться без проскальзывания, имея кинетическую энергию вращения 200 Дж, то сила трения совершила работу, равную …
5.Обруч массой m = 0.3кг и радиусом R= 0.5 м привели во вращение, сообщив ему энергию вращательного движения 1200 Дж, и отпустили на пол так, что его ось вращения оказалась параллельной плоскости пола. Если обруч начал двигаться без проскальзывания, имея кинетическую энергию вращения 200 Дж, то сила трения совершила работу, равную …
 За время Δt= 5 с полета модуль изменения импульса тела равен Δр = 200 . Сопротивление воздуха не учитывать. Масса этого тела равна … кг.
За время Δt= 5 с полета модуль изменения импульса тела равен Δр = 200 . Сопротивление воздуха не учитывать. Масса этого тела равна … кг. Кинетическая энергия первого тела Wк1вр= 0,5 Дж. Найдите момент импульса второго тела, если m = 1кг, R = 10 см.
Кинетическая энергия первого тела Wк1вр= 0,5 Дж. Найдите момент импульса второго тела, если m = 1кг, R = 10 см.  Определить величину момента силы, действующей на тело, в конце второй секунды от начала движения.
Определить величину момента силы, действующей на тело, в конце второй секунды от начала движения.
 5. Цилиндр массой m = 5,0 кг катится без скольжения с постоянной скоростью 14 м/с. Определите кинетическую энергию цилиндра. Через какое время цилиндр остановится, если будет действовать сила трения равная 50 Н?
5. Цилиндр массой m = 5,0 кг катится без скольжения с постоянной скоростью 14 м/с. Определите кинетическую энергию цилиндра. Через какое время цилиндр остановится, если будет действовать сила трения равная 50 Н?20.2: Ограниченное движение — перемещение и вращение
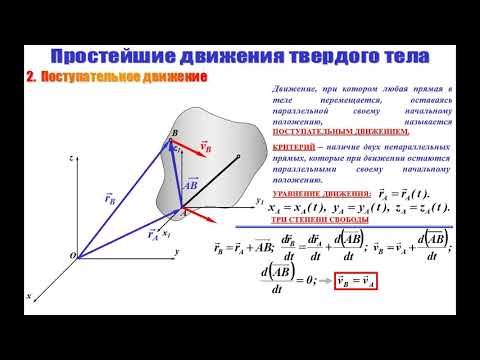
Мы столкнемся со многими примерами катящегося объекта, движение которого ограничено. Например, мы будем изучать движение объекта, катящегося по ровной или наклонной поверхности, и движение йо-йо, разматывающего и наматывающего струну. Мы рассмотрим условия связи между поступательными величинами, описывающими движение центра масс, перемещение, скорость и ускорение, и вращательными величинами, описывающими движение вокруг центра масс, угловое смещение, угловую скорость и угловое ускорение. Мы начнем с обсуждения вращения и перемещения катящегося колеса.
Рис. 20.2. Катящееся колесо. Предположим, что колесо радиуса R катится по прямой (рис. 20.2). Центр масс колеса движется прямолинейно с постоянной скоростью \(\overrightarrow{\mathbf{V}}_{c m}\). {\prime}\) обозначает скорость точки P на ободе относительно центра масс системы отсчета \(O_{c m}\) двигаясь со скоростью \(\overrightarrow{\mathbf{V}}_{c m}\) относительно точки O (рис. 20.3b). (Вам следует просмотреть определение системы отсчета центра масс в главе 15.2.1.) Мы можем использовать закон сложения скоростей (уравнение 15.2.4), чтобы связать эти три скорости, 9{\ простое число} + \ overrightarrow {\ mathbf {V}} _ {c m} \ nonumber \]
{\prime}\) обозначает скорость точки P на ободе относительно центра масс системы отсчета \(O_{c m}\) двигаясь со скоростью \(\overrightarrow{\mathbf{V}}_{c m}\) относительно точки O (рис. 20.3b). (Вам следует просмотреть определение системы отсчета центра масс в главе 15.2.1.) Мы можем использовать закон сложения скоростей (уравнение 15.2.4), чтобы связать эти три скорости, 9{\ простое число} + \ overrightarrow {\ mathbf {V}} _ {c m} \ nonumber \]
Выберем декартовы координаты для поступательного движения и полярные координаты для движения вокруг центра масс, как показано на рис. 20.3.
Рисунок 20.3 (a) система отсчета, закрепленная на земле, (b) система отсчета с центром массСкорость центра масс в системе отсчета, закрепленной на земле, определяется как
\[\overrightarrow{\mathbf{V}}_{c m}=V_{\mathrm{cm}} \hat{\mathbf{i}} \nonumber \]
, где \(V_{\mathrm{см}}\) — скорость центра масс. Положение центра масс в системе отсчета, закрепленной на земле, равно
.
\[\overrightarrow{\mathbf{R}}_{\mathrm{cm}}(t)=\left(X_{\mathrm{cm}, 0}+V_{\mathrm{cm}} t\right) \ шляпа {\ mathbf {i}} \ не число \]
где \(X_{\mathrm{cm}, 0}\) – начальная x -компонента центра масс в точке \(t=0\) Задается угловая скорость колеса в системе отсчета центра масс по
\[\vec{\omega}_{\mathrm{cm}}=\omega_{\mathrm{cm}} \hat{\mathbf{k}} \nonumber \] 9{\prime}=R \omega_{\mathrm{cm}} \hat{\boldsymbol{\theta}}\) в декартовых координатах. Предположим, что при \(t=0, \theta(t=0)=0\) т.е. точка P находится в верхней части колеса при t = 0 . Тогда единичные векторы в полярных координатах удовлетворяют (рис. 20.4)
\[\begin{array}{l}
\hat{\mathbf{r}}=\sin \theta \hat{\mathbf{i}}-\cos \theta \hat{\mathbf{j}} \ \
\ шляпа {\ mathbf {\ theta}} = \ cos \ тета \ шляпа {\ mathbf {i}} + \ грех \ тета \ шляпа {\ mathbf {j}}
\ конец {массив} \ не число \]
Следовательно, скорость точки P на ободе в центре масс системы отсчета равна 9{\ prime} = R \ omega _ {\ mathrm {cm}} \ hat {\ boldsymbol {\ theta}} = R \ omega _ {\ mathrm {cm}} (\ cos \ theta \ hat {\ mathbf {i}} -\sin\theta\hat{\mathbf{j}}) \nonumber\]
Рисунок 20. 4. Единичные векторы
4. Единичные векторыТеперь подставьте уравнения (20.2.2) и (20.2.7) в уравнение (20.2.1) для скорости точки P на ободе в системе отсчета, закрепленной на земле
\[\begin{align}
\overrightarrow{\mathbf{v}}_{P} &=R \omega_{\mathrm{cm}}(\cos\theta\hat{\mathbf{i}}+\ sin \ тета \ шляпа {\ mathbf {j}}) + V _ {\ mathrm {см}} \ шляпа {\ mathbf {i}} \\
& = \ влево (V _ {\ mathrm {см}} + R \ omega _ {\ mathrm {см}} \ cos \ theta \ right) \ шляпа {\ mathbf {i}} + R \ omega _ {\ mathrm {см }} \sin \theta \hat{\mathbf{j}}
\end{aligned} \nonumber \]
Точка P касается земли, когда \(\theta=\pi\). В этот момент скорость точки Р на ободе в системе отсчета, закрепленной на земле, равна
\[\overrightarrow{\mathbf{v}}_{P}(\theta=\pi)=\left(V_{\mathrm{cm}}-R \omega_{\mathrm{cm}}\right) \ шляпа {\ mathbf {i}} \ не число \]
Какую скорость наблюдатель, находящийся в состоянии покоя на земле, измеряет для точки на ободе, когда эта точка соприкасается с землей? Чтобы понять связь между \(V_{\mathrm{cm}}\) и \(\omega_{c m}\), рассмотрим смещение центра масс за небольшой интервал времени \(\Delta t\ ) (рис. 20.5).
20.5).
Из уравнения (20.2.3) х-компонент смещения центра масс равен
\[\Delta X_{\mathrm{cm}}=V_{\mathrm{cm}} \Delta t \nonumber \]
Точка P на ободе в системе центра масс отсчета совершает круговое движение (рис. 20.6).
Рисунок 20.6: Небольшое смещение точки на ободе в системе отсчета центра масс.В системе отсчета центра масс величина тангенциального смещения определяется длиной дуги, образуемой угловым смещением \(\Delta \theta=\omega_{\mathrm{cm}} \Delta t\)
\[\Delta s=R \Delta \theta=R \omega_{\mathrm{cm}} \Delta t \nonumber \]
Случай 1: если x -компонента смещения центра масс равна длине дуги, стягиваемой \(\Delta \theta\), то колесо катится без проскальзывания или заноса, короче говоря, катится без проскальзывания, по поверхности с
\[\Delta X_{\mathrm{cm}}=\Delta s \nonumber \]
Подставить уравнение (20.2.10) и уравнение (20.2.11) в уравнение (20. 2.12) и разделить на \(\Delta t\). Тогда условие качения без проскальзывания становится равным
2.12) и разделить на \(\Delta t\). Тогда условие качения без проскальзывания становится равным
\[V_{\mathrm{см}}=R \omega_{\mathrm{см}}, \quad(\text {катится без проскальзывания}) \nonumber \]
Случай 2: если x -компонента смещения центра масс больше длины дуги, стягиваемой \(\Delta \theta\), то колесо скользит по поверхности с
\[\Delta X_{\mathrm{cm}}>\Delta s \nonumber \]
Подставить уравнения (20.2.10) и (20.2.11) в уравнение (20.2.14) и разделить на \(\Delta t\), затем
\[V_{\mathrm{cm}}>R \omega_{\mathrm{cm}}, \quad(\text {скольжение}) \nonumber \]
Случай 3: если x -компонента смещения центра масс меньше длины дуги, стягиваемой \(\Delta \theta\), то колесо скользит по поверхности с
\[\Delta X_{\mathrm{cm}}<\Delta s \nonumber \]
Рассуждая, как указано выше, условие проскальзывания становится
\[V_{\mathrm{см}} Когда колесо катится без проскальзывания, скорость точки P на ободе равна нулю, когда оно соприкасается с землей. \[\overrightarrow{\mathbf{v}}_{P}(\theta=\pi)=\left(V_{\mathrm{cm}}-R \ omega _ {\ mathrm {cm}} \ right) \ hat {\ mathbf {i}} = \ left (R \ omega _ {\ mathrm {cm}} -R \ omega _ {\ mathrm {cm}} \ right) \ hat{\mathbf{i}}=\overrightarrow{\mathbf{0}} \nonumber \] Это имеет смысл, потому что скорость точки P на ободе в центре системы отсчета, когда она находится в контакте с Земля указывает в направлении, противоположном поступательному движению центра масс колеса. Две скорости имеют одинаковую величину, поэтому сумма векторов равна нулю. Наблюдатель, покоящийся на земле, видит точку контакта на ободе, покоящемся относительно земли. Таким образом, любая сила трения, действующая между шиной и землей на колесе, является трением покоя, поскольку две поверхности мгновенно находятся в покое по отношению друг к другу. Напомним, что направление силы трения покоя зависит от других сил, действующих на колесо. Рассмотрим велосипедное колесо радиуса R, которое катится по прямой без проскальзывания. Скорость центра масс в системе отсчета, закрепленной на земле, определяется как скорость \(\overrightarrow{\mathbf{V}}_{\mathrm{cm}}\). На расстоянии b от центра колеса к спице крепится бусина (рис. 20.7). а) Найдите положение, скорость и ускорение шарика как функцию времени в системе отсчета центра масс. (b) Найдите положение, скорость и ускорение шарика в зависимости от времени, как видно из системы отсчета, закрепленной на земле. Решение: a) Выберите систему отсчета центра масс с началом в центре колеса и перемещаясь вместе с колесом. Выберите полярные координаты (рис. 20.8). z – составляющая угловой скорости \(\omega_{\mathrm{cm}}=d \theta / d t>0\). Тогда шарик движется равномерно по окружности радиуса r = b с положением, скоростью и ускорением, заданными как \[\overrightarrow{\mathbf{r}}_{b}^{\prime}=b \hat {\ mathbf {r}}, \ quad \ overrightarrow {\ mathbf {v}} _ {b} ^ {\ prime} = b \ omega _ {\ mathrm {cm}} \ hat {\ theta}, \ quad \ overrightarrow {\mathbf{a}}_{b}^{\prime}=-b \omega_{\mathrm{cm}}^{2} \hat{\mathbf{r}} \nonumber \] 9{\ простое число} = R \ omega _ {\ mathrm {см}} \). b) Определите вторую систему отсчета, закрепленную на земле, с выбором начала координат, декартовыми координатами и единичными векторами, как показано на рисунке 20.9. Тогда вектор положения центра масс в системе отсчета, закрепленной на земле, равен \[\overrightarrow{\mathbf{R}}_{c m} (t) = X_ {c m} \ hat {\ mathbf {i}} + R \ hat {\ mathbf {j}} = V_ {c m} t \ hat {\ mathbf {i}} + R \ hat {\ mathbf {j}} \nonumber \] Относительная скорость двух систем отсчета является производной \[\overrightarrow{\mathbf{V}}_{\mathrm{cm}}=\frac{d \overrightarrow{\mathbf{R}}_{\mathrm{cm}}}{d t}=\frac {d X_{\mathrm{cm}}}{d t} \hat{\mathbf{i}}=V_{\mathrm{cm}} \hat{\mathbf{i}} \nonumber \] Потому что центр колеса движется с постоянной скоростью, относительное ускорение двух кадров равно нулю, \[\overrightarrow{\mathbf{A}}_{\mathrm{cm}}=\frac{d \overrightarrow{\mathbf {V}}_{\mathrm{cm}}}{d t}=\overrightarrow{\mathbf{0}} \nonumber \] Определяет положение, скорость и ускорение в этом кадре (относительно земли) к 9{\ простое число} (t) = \ left (V _ {\ mathrm {cm}} t \ hat {\ mathbf {i}} + R \ hat {\ mathbf {j}} \ right) + (b \ sin \ theta (t) \hat{\mathbf{i}}+b \cos\theta(t) \hat{\mathbf{j}}) \\ Таким образом, компоненты положения шарика с относительно системы отсчета, закрепленной на земле, равны 9{-1}\), \(R=0,25 \mathrm{m}\) и \(b=0,125 \mathrm{m}\). \[\overrightarrow{\mathbf{v}}_{b}(t)=\frac{d \overrightarrow{\ mathbf{r}}_{b}}{d t}(t)=\frac{d}{d t}\left(V _{\mathrm{cm}} t+b \sin\left(\left(V_{\ mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{i}}+\frac{d}{d t}\left(R+b\cos\left(\left(V_ {\ mathrm {cm}} / R \ right) t \ right) \ right) \ hat {\ mathbf {j}} \ nonumber \] \[\overrightarrow{\mathbf{v}}_{b}(t)=\left(V_{\mathrm{cm}}+(b / R) V \cos \left(\left(V_{\ mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{i}}-\left((b / R) V_{\mathrm{cm}} \sin\left(\left (V_{\mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{j}} \nonumber \] Альтернативно, мы можем разложить скорость шарика в системе отсчета центра масс в декартовы координаты Качение без проскальзывания
 В уравнении (20.2.9) установить \(\theta=\pi\),
В уравнении (20.2.9) установить \(\theta=\pi\), Пример 20.
 1 Велосипедное колесо катится без проскальзывания
1 Велосипедное колесо катится без проскальзывания {2}} \ шляпа {\ mathbf {r}} \ не число \]
{2}} \ шляпа {\ mathbf {r}} \ не число \]
=\left(V_{\mathrm{cm}} t+b \ sin \left(\left(V_{\mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{i}}+\left(R+b\cos\left(\left (V_{\mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{j}}
\end{array} \nonumber \] Мы можем продифференцировать вектор положения в системе отсчета, закрепленной на земле, чтобы найти скорость шарика
Мы можем продифференцировать вектор положения в системе отсчета, закрепленной на земле, чтобы найти скорость шарика
\[\ overrightarrow {\ mathbf {v}} _ {b} (t) = V _ {\ mathrm {см}} \ шляпа {\ mathbf {i}} + (b / R) V _ {\ mathrm {см}} \ влево (\ cos \ влево (\ влево (V _ {\ mathrm {см}} / R \ вправо) т \ вправо) \ шляпа {\ mathbf {я}} -\sin\left(\left(V_{\mathrm{cm}} / R\right) t\right) \hat{\mathbf{j}}\right) \nonumber \]
\[\overrightarrow{\ mathbf {v}} _ {b} (t) = \ left (V _ {\ mathrm {cm}} + (b / R) V _ {\ mathrm {cm}} \ cos \ left (\ left (V _ {\ mathrm {см}} / R \ справа) t \ справа) \ справа) \ шляпа {\ mathbf {i}} – (b / R) \ грех \ влево (\ влево (V _ {\ mathrm {см}} / R \ справа) t\справа) \hat{\mathbf{j}} \nonumber \] 9{2}\left(\sin\left(\left(V_{\mathrm{cm}} / R\right) t\right) \hat{\mathbf{i}}+\cos\left(\left(V_ {\mathrm{cm}} / R\right) t\right) \hat{\mathbf{j}}\right) \nonumber \]
Когда борт находится на ободе колеса, b = R , тогда положение шарика в системе отсчета, закрепленной на земле, определяется как
\[\left. \overrightarrow{\mathbf{r}}_{b}(t)=\left(V_{\mathrm{cm} } t+R \sin\left(\left(V_{\mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{i}}+R\left(1+\cos \left(\left(V_{\mathrm{cm}} / R\right) t\right)\right)\right) \hat{\mathbf{j}} \nonumber \] 9{2}\) стартует с места и без скольжения катится по склону, наклоненному под углом β к горизонту. Центр масс цилиндра опустился на расстояние h по вертикали, когда он достиг нижней точки наклона. Пусть g обозначает гравитационную постоянную. Какова связь между составляющей ускорения центра масс в направлении вниз по наклонной плоскости и составляющей углового ускорения в сторону рисунка 20.11?
\overrightarrow{\mathbf{r}}_{b}(t)=\left(V_{\mathrm{cm} } t+R \sin\left(\left(V_{\mathrm{cm}} / R\right) t\right)\right) \hat{\mathbf{i}}+R\left(1+\cos \left(\left(V_{\mathrm{cm}} / R\right) t\right)\right)\right) \hat{\mathbf{j}} \nonumber \] 9{2}\) стартует с места и без скольжения катится по склону, наклоненному под углом β к горизонту. Центр масс цилиндра опустился на расстояние h по вертикали, когда он достиг нижней точки наклона. Пусть g обозначает гравитационную постоянную. Какова связь между составляющей ускорения центра масс в направлении вниз по наклонной плоскости и составляющей углового ускорения в сторону рисунка 20.11?
Решение: Мы начинаем с выбора системы координат для поступательного и вращательного движения, как показано на рисунке 20.12.
Рис. 20.12 Система координат для катящегося цилиндра Для интервала времени \(\Delta t\) смещение центра масс определяется выражением \(\Delta \overrightarrow{\mathbf{R}}_{c m}(t) =\Delta X_{c m} \hat{\mathbf{i}}\) Длина дуги из-за углового смещения точки на ободе в течение интервала времени \(\Delta t\) определяется выражением \(\Delta s=R \Дельта\тета\). Условие качения без проскальзывания
Условие качения без проскальзывания
\[\Delta X_{c m}=R \Delta \theta \nonumber \]
Если мы разделим обе стороны на \(\Delta t\) и возьмем предел как \(\Delta t \rightarrow 0\), то условие качения без проскальзывания показывает, что x -составляющая скорости центра масс равна величине тангенциальной составляющей скорости точки на ободе
\[V _ {\ mathrm {см}} = \ lim _ {\ Delta t \ rightarrow 0} \ frac {\ Delta X _ {\ mathrm {см}}} {\ Delta t} = \ lim _ {\ Delta t \rightarrow 0} R \frac{\Delta \theta}{\Delta t}=R \omega_{\mathrm{cm}} \nonumber \]
Точно так же, если мы продифференцируем обе части приведенного выше уравнения, мы найдем отношение между x -составляющей ускорения центра масс равно величине тангенциальной составляющей ускорения точки на ободе
\[A_{\mathrm{cm}}=\frac{d V_{\ mathrm{cm}}}{d t}=R \frac{d \omega_{\mathrm{cm}}}{d t}=R \alpha_{\mathrm{cm}} \nonumber \] 9{2}\) (толщиной нити можно пренебречь). Йо-йо выходит из состояния покоя. Какова связь между угловым ускорением относительно центра масс и линейным ускорением центра масс?
Какова связь между угловым ускорением относительно центра масс и линейным ускорением центра масс?
Рассмотрим точку на ободе оси на расстоянии \(r=b\) от центра масс. Когда йо-йо падает, длина дуги \(\Delta s=b \Delta \theta\), образуемая вращением этой точки, равна длине распущенной нити, т.е. величине \(\Delta l\). В интервале времени \(\Delta t, b \Delta \theta=\Delta l\). Следовательно, \(b \Delta \theta / \Delta t=\Delta l / \Delta t\). Принимая ограничения, отмечая, что \(V _ {\mathrm{cm}, y}=d l / d t\) имеем что \(b \omega_{\mathrm{cm}}=V_{\mathrm{cm}, y}\) Дифференцирование во второй раз дает \(b \alpha_{\mathrm{cm}}=A _{\mathrm{cm }, у}\).
Пример 20.4 Разматывание барабана
Барабан A массой m и радиусом R подвешен к барабану B также массой m и радиусом R , который может свободно вращаться вокруг своей оси. Подвеска представляет собой безмассовую металлическую ленту, намотанную на внешнюю сторону каждого барабана и свободно разматывающуюся (рис. 20.14). Гравитация действует с ускорением g вниз. Оба барабана изначально покоятся. Найти начальное ускорение барабана А, считая, что он движется прямо вниз.
20.14). Гравитация действует с ускорением g вниз. Оба барабана изначально покоятся. Найти начальное ускорение барабана А, считая, что он движется прямо вниз.
Решение: Ключом к решению этой задачи является определение соотношения между тремя кинематическими величинами \(\alpha_{A}, \alpha_{B}, \text { и } a_{A}\) угловые ускорения двух барабанов и линейное ускорение барабана A . Выберите положительную ось Y, указывающую вниз, с исходной точкой в центре барабана B. Через промежуток времени \(\Delta t\) центр барабана A претерпел смещение \(\Delta y\). Количество ленты \(\Delta l_{A}=R \Delta \theta_{A}\) размоталось с барабана A , и количество ленты \(\Delta l_{B}=R \Delta \theta_{B }\) распутался с барабана B . Следовательно, смещение центра барабана А равно общему количеству ленты, размотанной с двух барабанов, \(\Delta y=\Delta l_{A}+\Delta l_{B}=R \Delta \theta_ {A}+R \Delta\theta_{B}\). Деление на \(\Delta t\) и принятие предела как \(\Delta t \rightarrow 0\) дает 9{2}} \\
a_{A, y}=R \alpha_{A}+R \alpha_{B}
\end{массив} \nonumber \]
Эта страница под названием 20. 2: Ограниченное движение — перевод и вращение распространяется по лицензии CC BY-NC-SA 4.0, автором, ремиксом и/или куратором был Петр Доурмашкин (MIT OpenCourseWare) с использованием исходного контента, который был отредактирован для стиль и стандарты платформы LibreTexts; подробная история редактирования доступна по запросу.
2: Ограниченное движение — перевод и вращение распространяется по лицензии CC BY-NC-SA 4.0, автором, ремиксом и/или куратором был Петр Доурмашкин (MIT OpenCourseWare) с использованием исходного контента, который был отредактирован для стиль и стандарты платформы LibreTexts; подробная история редактирования доступна по запросу.
Поступательное и вращательное движение — SUNSPIRE®
Общее описание программного продукта
Программный комплекс «Поступательно-вращательное движение» включает 10 виртуальных лабораторных работ из курса общей физики для студентов высших и средних учебных заведений.
Список виртуальных лабораторий:
1. Равноускоренное движение
2. Равноускоренное движение
3. Законы столкновений
4. Свободное падение
5. Наклонный старт
6. Прецессия и нутация гироскопа
7. Вращательное движение с равноускорением
8. Момент инерции горизонтального стержня
9. Момент инерции различных тел
10. Колесо Максвелла
Колесо Максвелла
Тип целевого вычислительного устройства и поддерживаемая платформа: IBM-совместимый персональный компьютер под управлением Microsoft Windows.
Дополнительно в комплект входит веб-версия виртуальной лаборатории (платформа HTML-5), предназначенная для загрузки на сервер образовательной организации с целью проведения дистанционных занятий со студентами.
Графический компонент программы использует компонентную базу OpenGL 2.0. Графический пользовательский интерфейс программы реализован на английском языке.
Минимальные системные требования
- Тактовая частота процессора: не менее 2 ГГц
- Оперативная память: не менее 4 ГБ
- Видеопамять: не менее 512 МБ
- Разрешение экрана: не менее 1024x768x32
- Поддержка OpenGL версии 2.0
- Поддержка DirectX версии 9.
 0.c (для Windows)
0.c (для Windows) - Стандартная клавиатура и компьютерная мышь с колесиком прокрутки (для ПК)
- Устройства воспроизведения звука (динамики или наушники)
Для работы с веб-версией виртуальной лаборатории необходимо использовать веб-браузер, поддерживающий 3D-графику WebGL, например, Google Chrome, Microsoft Edge, Opera, Mozilla Firefox. Компоненты HTML веб-версии должны быть загружены на физический сервер. Если вам нужно использовать локальный сервер, рекомендуется использовать сборку XAMPP (Apache).
Типы лицензирования
Виртуальная лаборатория поставляется только для образовательных организаций с установкой на неограниченное количество мест (корпоративная лицензия).
1. Равноускоренное движение
Цели: изучение равноускоренного движения тела в зависимости от ускоряющей и ускоряемой масс.
2. Движение с равноускорением
Цели: измерение расстояния в зависимости от времени; определение скорости в любой заданный момент времени; определение ускорения в любой заданной точке в зависимости от времени; определение среднего ускорения по данным.
3. Законы столкновений
Цели: исследование упругих и неупругих соударений двух скользящих тел на воздушной трассе; демонстрация сохранения импульса при упругих и неупругих столкновениях и наблюдение отдельных импульсов при упругих столкновениях; изучение распределения энергии при упругих и неупругих столкновениях.
4. Свободное падение
Цели: измерение времени падения мяча на расстояние между спусковым механизмом и целью внизу; построение диаграммы расстояние/время для равноускоренного движения; демонстрация того, что пройденное расстояние пропорционально квадрату времени; определение ускорения свободного падения.
5. Наклонный пуск
Цели: измерение ширины траектории в зависимости от угла броска и начальной скорости; расчет начальной скорости по максимальной ширине траектории; построение по точкам параболического пути в зависимости от угла броска.
6. Прецессия и нутация гироскопа
Цели: демонстрация того, что период вращения диска обратно пропорционален периоду прецессии гироскопа; определение момента инерции диска; демонстрация того, что период вращения диска пропорционален периоду нутации.
7. Вращательное движение с равноускорением
Цели: построение зависимости угла поворота от времени при равноускоренном вращательном движении; подтверждение пропорциональности между углом поворота и квадратом времени; определение углового ускорения как функции крутящего момента; определение углового ускорения в зависимости от момента инерции; подтверждение уравнения движения Ньютона.
8. Момент инерции горизонтального стержня
Цели: определение коэффициента кручения пружины; определение момента инерции в зависимости от расстояния от дополнительных грузов до оси; определение момента инерции в зависимости от массы дополнительного груза.
9. Момент инерции различных испытательных тел
Цели: определение коэффициента кручения пружины; определение момента инерции стержня без дополнительных грузов; определение момента инерции в зависимости от расстояния от груза до оси; определение момента инерции круглого деревянного диска, деревянного шара, сплошного и полого цилиндра.