
Как сделать гриль-гироскоп своими руками
Существует огромное количество разновидностей грилей. У каждого есть своим плюсы и минусы. А есть такие, у которых практически отсутствуют какие-либо недостатки.
В данном обзоре автор рассказывает и показывает, как изготовить очень интересный и функциональный гриль-гироскоп своими руками.
Для его изготовления потребуются следующие материалы:
- профильные и квадратные трубы;
- металлические уголки;
- стальная полоса;
- круглая арматура различных диаметров;
- электродвигатель.
Помимо этого, нам понадобятся пара небольших шестерёнок, пара подшипников с держателями, просечной лист и старая металлическая бочка.
Из инструмента будут необходимы следующие:
- сверлильный и отрезной инструмент;
- станок для придания округлых форм металлической полосе;
- сварочный аппарат.
Для начала отрезаем от квадратной трубы четыре одинаковых отрезка под 45 градусов. Свариваем их вместе и формируем раму гриля. По углам рамы привариваем четыре ножки.
Свариваем их вместе и формируем раму гриля. По углам рамы привариваем четыре ножки.
Основные этапы работ
На следующем этапе формируем нижнюю сетку. Для этого свариваем четыре уголка необходимого размера и привариваем просечной лист. В нижней части рамы привариваем данную сетку.
Теперь установим боковые держатели для гироскопа. Свариваем по три отрезка профильной трубы и сверлим в стенках отверстия нужного диаметра. Затем на внешние стороны привариваем уголки с несколькими отверстиями.
Далее необходимо изготовить сам гироскоп. Для этого отрезаем три полосы необходимой длины. И на станке придаём им форму обручей. Каждый обруч должен быть чуть меньшего диаметра, чем предыдущее кольцо.
В самом большом кольце сверлим отверстия и привариваем по наружной части два отрезка арматуры. Продеваем подшипники и крепим их уголкам.
Далее на втором кольце сверлим четыре отверстия. На болтовое соединение соединяем первое и второе кольцо.
Третье кольцо необходимо сделать в виде сетки. Привариваем арматуру внутри кольца, формируя решетку. В четвертое кольцо также привариваем арматуру.
Привариваем арматуру внутри кольца, формируя решетку. В четвертое кольцо также привариваем арматуру.
Располагаем третье и четвертое кольцо так, чтобы получилась клетка из арматуры. На один край привариваем петлю, а со второй стороны некое подобие замка. Соединяем третье кольцо со вторым, по необходимым отверстиям.
Теперь можно сделать топку. Отрезаем от бочки одну часть и вырезаем дверку. Привариваем к дверке петлю и замок.
Далее сгибаем ещё одну полосу и привариваем полосы металла внутри, формируя колосник. Привариваем ножки из арматуры.
Механизм опускания и поднимания топки, можно изготовить из арматуры, закрепленной на раме и пары полос металла. Привариваем и соединяем всё согласно схеме.
Для удобства пользования собираем небольшой столик с одного края и крепим его отрезками цепи. С другой стороны привариваем площадку под двигатель. Вал с шестернёй закрепляем на арматуре, которая выходит из подшипника, вторую шестерню — на двигателе.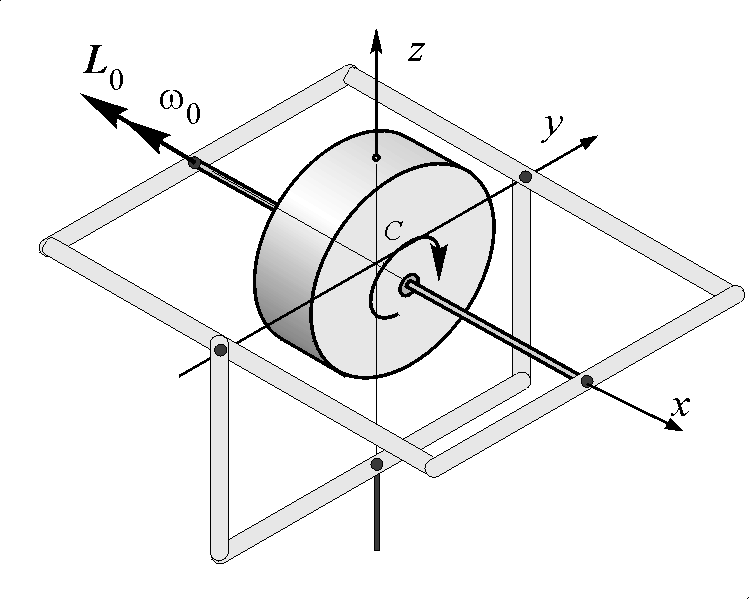
Соединяем всё цепью и проверяем. Далее красим всю металлоконструкцию в необходимый цвет, и можно пользоваться.
Подробное изготовление данного гриля, можно посмотреть на видео ниже. Материал подготовлен на основе авторского видеоролика с YouTube канала Rock & Fix.
Мне нравитсяНе нравитсяАндрей Васильев
Задать вопрос
Оригинальный Механический Гироскоп (2 в 1) в коробке Tedco
Гироскоп TEDCO
С начала 21го века компания Chandler, ныне – Гироскоп TEDCO, создала миллионы гироскопов, подобных этому. Гироскоп – это высокоточное устройство, с которым следует аккуратно обращаться, чтобы избежать повреждений корпуса или хрупкой балансировки ротора.
Обратите внимание на трещину в корпусе. Ее наличие не означает, что гироскоп сломан. Это сделано специально, чтобы сделать устройство более сбалансированным. Концы корпуса в месте трещины должны лишь касаться друг друга.
Концы корпуса в месте трещины должны лишь касаться друг друга.
Действие гироскопических сил, демонстрируемое гироскопом TEDCO абсолютно идентично тому, которое наблюдал Исаак Ньютон в 18 веке. В настоящее время они применяются в корабельных системах с гироуправлением, самолетах, космических аппаратах; картографии и исследовательских работах; при бурении нефтяных скважин; в кинематографе. Таким образом, вы можете понять и освоить действие гироскопических сил, которые уже применяются и будут применяться в будущем.
В чем секрет?
Ротор гироскопа должен крутиться быстро. Чтобы запустить гироскоп, для начала крепко удерживайте гироскоп в руке. Проденьте нить через небольшое отверстие вверху роторной оси. Поворачивая корпус, аккуратно намотайте нить на ось: от отверстия к центру, затем – в обратном направлении. Проверяйте плотность намотки; нить должна располагаться между отверстием и центром. Чтобы сильно раскрутить гироскоп, резко потяните за нить. Наблюдайте действие законов гироскопических сил.
Совет: Раскручивайте гироскоп только при помощи специальной нити из набора.
-
Установите крутящийся гироскоп на пластиковую подставку, на подушечку пальца, на грифель карандаша или любую другую маленькую горизонтальную поверхность. Вам покажется, что на гироскоп не действует гравитация; он будет сохранять относительное равновесие в пространстве, в независимости от того, как будет двигаться основание.
-
Установите гироскоп на провод или веревку, на край небьющегося стакана, на конец линейки или край любой другой твердой поверхности.
-
Установите крутящийся гироскоп на горизонтальную поверхность. На него установите еще один вращающийся гироскоп. Они будут сохранять равновесие одновременно.
Это лишь несколько способов, с помощью которых вы сможете управлять гироскопическими силами. Ваша изобретательность поможет вам найти и другие приемы.
Изредка смазывая маслом концы роторной оси устройства, вы сможете долгие годы поддерживать исправное состояние гироскопа TEDCO.
Код производителя: tc00066
Гироскопы на радиоуправляемых моделях
Авторы – Виталий Пузрин
Назначение гироскопов и устройство датчиков поворота
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж.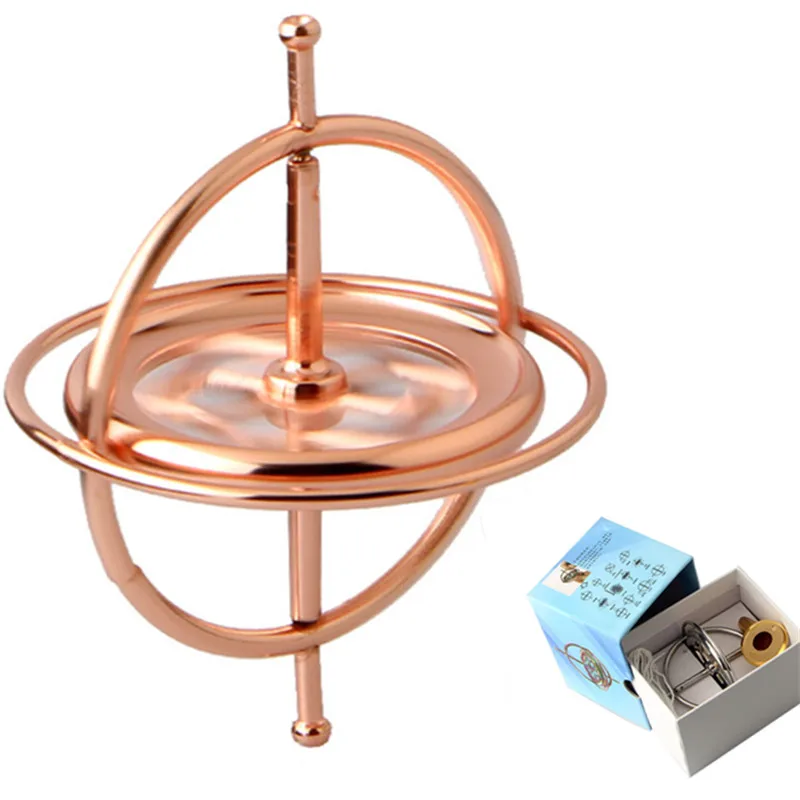
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также “крутых” современных гироскопах размешены в разных корпусах.
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.
Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Развитие современных технологий позволило разработать более совершенные датчики угловых скоростей. В результате появились пьезогироскопы, которые к настоящему времени полностью вытеснили механические. Конечно, они по-прежнему используют эффект кориолисова ускорения, но датчики являются твердотельными, то есть вращающиеся части отсутствуют. В наиболее распространенных датчиках используются вибрирующие пластины. Поворачиваясь вокруг оси, такая пластина начинает отклоняться в плоскости, поперечной плоскости вибрации. Это отклонение измеряется и поступает на выход датчика, откуда снимается уже внешней схемой для последующей обработки. Самыми известными производителями подобных датчиков являются фирмы Murata и Tokin.
Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.
У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т. е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка “нуля”, а в более дорогих – автоматическая установка “нуля” микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка “нуля”, а в более дорогих – автоматическая установка “нуля” микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой “AVCS”) уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур.
Типичные гироскопы и алгоритмы их работы
Наиболее известными производителями гироскопов на сегодняшний день являются фирмы Futaba, JR-Graupner, Ikarus, CSM, Robbe, Hobbico и т. д.
д.
Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
Гироскопы со стандартным режимом работы
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.
Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась. Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет – посмотрите характеристики устройства и руководство по эксплуатации).
Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет – посмотрите характеристики устройства и руководство по эксплуатации).
Регулировка чувствительности реализуется несколькими способами:
- Дистанционная регулировка отсутствует. Чувствительность задается на земле (регулятором на корпусе гироскопа) и не меняется во время полета.
- Дискретная регулировка (dual rates gyro). На земле задается два значения чувствительности гироскопа (двумя регуляторами). В воздухе можно выбирать нужное значение чувствительности по каналу регулирования.
- Плавная регулировка. Гироскоп выставляет чувствительность пропорционально сигналу в регулирующем канале.
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только “стандартный” режим работы, то можно отметить, что:
- Такие гироскопы имеют довольно низкую цену (вследствие простоты реализации)
- При установке на хвостовую балку вертолета, новичкам проще выполнять полеты по кругу, так как за балкой можно особенно не следить (балка сама разворачивается по ходу движения вертолета).
Недостатки:
- В недорогих гироскопах термокомпенсация сделана недостаточно хорошо. Необходимо вручную выставлять “ноль”, который может сместиться при изменении температуры воздуха.

- Приходится применять дополнительные меры по устранению эффекта подавления гироскопом управляющего сигнала (дополнительное микширование в канале управления чувствительности или увеличение расхода рулевой машинки).
Вот довольно известные примеры описанного типа гироскопов:
При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Гироскопы с режимом удержания направления
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки “3D”, “AVSC” (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
- на вертолете начинающий пилот в режиме висения может практически не управлять хвостовым винтом
- отпадает необходимость в микшировании шага хвостового винта с газом, что несколько упрощает предполетную подготовку
- триммирование хвостового винта можно производить без отрыва модели от земли
- становится возможным выполнение таких маневров, которые раньше были затруднены (например, полет хвостом вперед).
Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде “Torque Roll”.
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:
Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым “цифровым” машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Специализированные самолетные гироскопы
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.
При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов.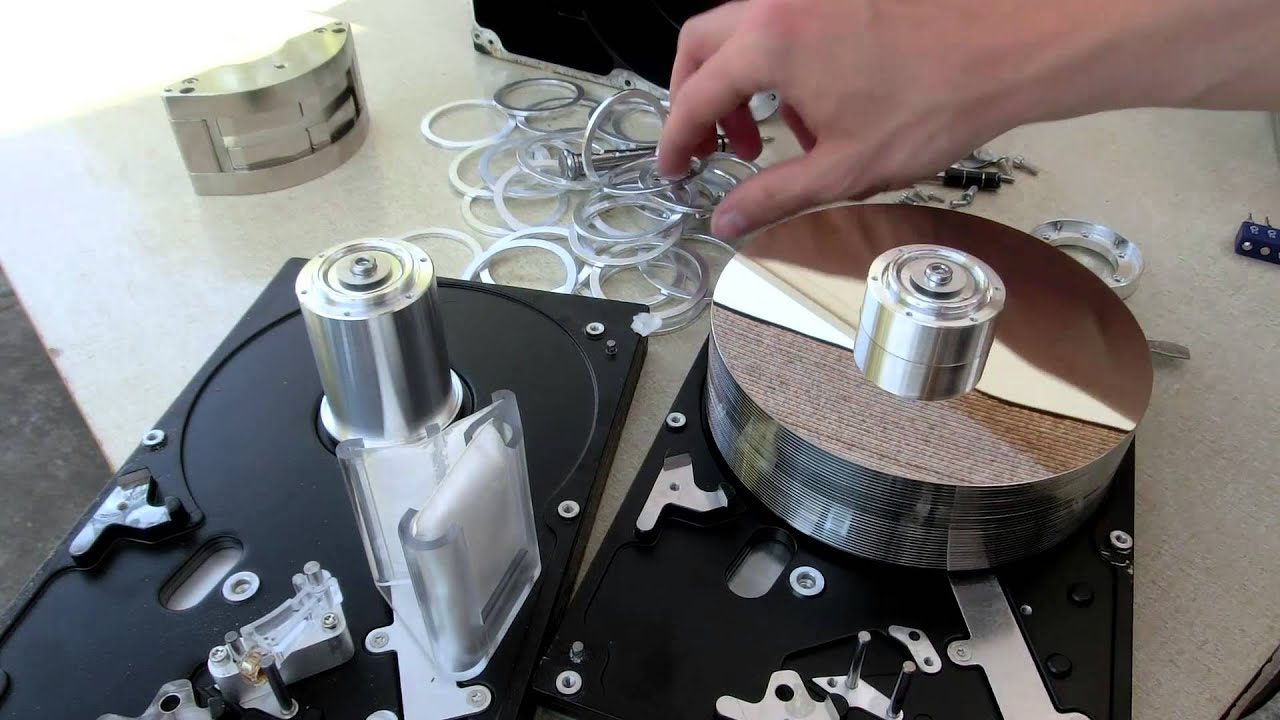 Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен – при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 “Беркут” С-37 показывал фигуру “харриер”. Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет “несваливаемым на крыло”. Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И. В.Остославского “Аэродинамика самолета”.
В.Остославского “Аэродинамика самолета”.
Заключение
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, – по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форумеГироскоп с удержанием направления
Гироскоп с удержанием направленияСамодельный гироскоп (Eng)
Если вы
не знаете, что такое RC гироскопы и
для чего они нужны, рекомендую
обзорную статью http://www. rcdesign.ru/articles/radio/gyro_stady
rcdesign.ru/articles/radio/gyro_stady
Идея сделать самодельный гироскоп с функцией удержания направления (Heading Hold, Smart Lock, AVCS) занимала меня довольно давно. В первую очередь это представлялось мне интересной инженерной задачей. Азарт также подстегивали многочисленные утверждения знатоков, что приблизиться к функциональности фирменных гироскопов типа Futaba или CSM невозможно. Реальных же проблем я видел всего три:
1.
датчик,
2. алгоритмы и
3. тестирование.
К примеру, решать вторую проблему путем третьей, причем в полевых условиях и на ДВС Рапторе мне представлялось не очень хорошей идеей, особенно при нерешенной первой проблеме. :о)
Решаем проблему номер один (датчик)
От использования недорогих датчиков типа Murata ENC-03M
я
отказался сразу после исследования
их температурных характеристик.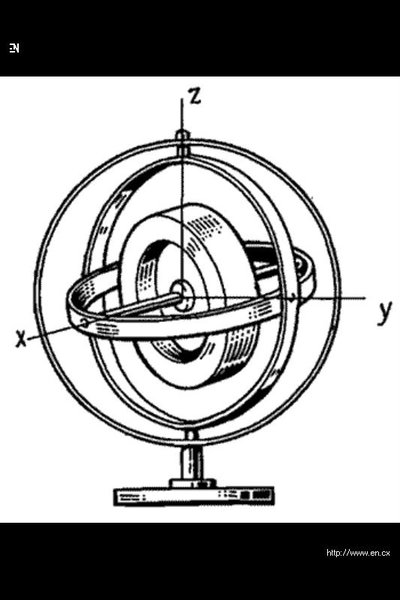 Вот примерно так выглядит
экспериментально снятая
зависимость выходного напряжения
датчика от температуры:
Вот примерно так выглядит
экспериментально снятая
зависимость выходного напряжения
датчика от температуры:
Линейная
аппроксимация дает коэффициент
около 3.4 мВ на градус температуры.
При этом чувствительность датчика -
около 0.7 мВ на градус в секунду
угловой скорости. Таким образом,
изменение температуры всего на 1
градус эквивалентно угловой
скорости почти 5 градусов в
секунду, т.е. интегральная ошибка
азимута за минуту составит почти 300
угл. градусов. Я же хотел получить
дрейф азимута не хуже 5-10 градусов в
минуту. Следовательно, ENC-03M не
подходил мне даже при условии
термокомпенсации или
термостатирования. От мечты
сделать гироскоп в 10 раз лучше
Футабы и при этом в 10 раз дешевле
поневоле пришлось отказаться. В
конце концов, первая проблема
решилась просто (хотя и не дешево) -
я купил датчик ADIS16100 производства
Analog Devices. На www.analog.com можно почитать про iMEMS
датчики, например, эту статью (кстати, технология
впечатляет!) и скачать
документацию.
На www.analog.com можно почитать про iMEMS
датчики, например, эту статью (кстати, технология
впечатляет!) и скачать
документацию.
Поскольку датчик имеет встроенный АЦП, схема получилась довольно простой. Схема гироскопа в формате PDF. Кроме очевидных вещей, я добавил в схему 4 Мбит EEPROM, чтобы облегчить себе решение проблем 2 и 3.
А вот как выглядит собранная плата:
Габаритные размеры 38х27х10 мм, масса – 6 граммов.
Сделать корпус я так и не удосужился, плата просто затянута в термоусадку. Так это выглядит на Trex-450:
Решаем проблему номер два (алгоритм работы и закон регулирования)
С
алгоритмом в первом приближении
все выглядело просто: чтобы
получить угол азимута, нужно
интегрировать угловую скорость и
соответственно управлять
хвостовой сервомашинкой, если
азимут меняется без команды руля
направления (РН). Неясными
оставались: закон и параметры
регулирования, а также кое-какие
нюансы типа того, что делать, если
вертолет на земле принудительно
развернули на несколько оборотов и
ошибка азимута составляет сотни
или тысячи градусов.
Неясными
оставались: закон и параметры
регулирования, а также кое-какие
нюансы типа того, что делать, если
вертолет на земле принудительно
развернули на несколько оборотов и
ошибка азимута составляет сотни
или тысячи градусов.
Для начала я проштудировал
инструкции на продвинутые
гироскопы Futaba и CSM, поскольку состав
их настроек дает некоторое
представление о возможном законе
регулирования. Очевидно
присутствие пропорционального и
интегрального контуров
регулирования, а также системы
демпфирования РН при выходе из
быстрых пируэтов. Затем я установил
свой гироскоп на вертолет вместе с
GY401, причем мой модуль измерял
угловую скорость, значение канала
РН и длительность сервоимпулься от
GY401 и сохранял их в реальном времени
в EEPROM. (Кстати, я внимательно изучил
инструкцию на GY401 и не нашел там
никаких запретов так поступать). В
таком режиме логгера я выполнил
несколько тестовых полетов и
просто различных поворотов с
разной амплитудой и скоростью, с
разными параметрами gain, delay, DS. Данные из EEPROM перекачивались в РС,
обрабатывались и анализировались.
Выяснилось, что если рассматривать
GY401 как систему стабилизации угла с
обратной связью (ОС), то там
работает
пропорционально-дифференциальное
(ПД) регулирование. Соответственно,
если рассматривать его как
стабилизатор угловой скорости, то
регулирование можно назвать
пропорционально-интегральным (ПИ).
Важно, что интегральный контур
имеет ограничитель в несколько
десятков градусов, и этот
ограничитель препятствует
накоплению слишком больших ошибок
азимута, когда контур ОС разомкнут
(помните нюансы?). После этого не
составило большого труда подобрать
коэффициенты контуров по образу и
подобию Футабы. Вот так, к примеру,
совпали графики реакции на
разворот гироскопа GY401 и моей
компьютерной ПИ модели:
Данные из EEPROM перекачивались в РС,
обрабатывались и анализировались.
Выяснилось, что если рассматривать
GY401 как систему стабилизации угла с
обратной связью (ОС), то там
работает
пропорционально-дифференциальное
(ПД) регулирование. Соответственно,
если рассматривать его как
стабилизатор угловой скорости, то
регулирование можно назвать
пропорционально-интегральным (ПИ).
Важно, что интегральный контур
имеет ограничитель в несколько
десятков градусов, и этот
ограничитель препятствует
накоплению слишком больших ошибок
азимута, когда контур ОС разомкнут
(помните нюансы?). После этого не
составило большого труда подобрать
коэффициенты контуров по образу и
подобию Футабы. Вот так, к примеру,
совпали графики реакции на
разворот гироскопа GY401 и моей
компьютерной ПИ модели:
Для
желающих повторить упражнение
выкладываю небольшой, но вполне
достаточный лог. Скачать
лог (Кстати,
этих логов у меня мегабайты, если
нужны – пишите, но, уверяю, ничего
более интересного там нет).
Скачать
лог (Кстати,
этих логов у меня мегабайты, если
нужны – пишите, но, уверяю, ничего
более интересного там нет).
Надо честно заметить, что на быстрых пируэтах с разомкнутой ОС дорожки GY401 и моей ПИ модели несколько расходились. Возможно, из-за разных алгоритмов ограничения И контура. Также возможно, что Футаба несколько уменьшает к-ты регулирования при высоких угловых скоростях. В любом случае, я не усмотрел тут особой проблемы для общей функциональности. Что касается дистанционной регулировки чувствительности GY401, она влияет одновременно на коэффициенты обоих контуров (П и И). В режиме DS (digital servo) период сервоимпульсов на выходе GY401 уменьшается с 14 мс до 3.7мс. Регулировка DELAY затягивает быстрые фронты при возвращении ручки РН в нейтраль. Вот, собственно, и все, что удалось вытянуть из GY401.
Далее
уже было делом программистской
техники претворить добытые
сакральные данные в программу для
микроконтроллера ATmega88. Объем кода
составил около 6 кБайт. На текущий
момент реализован нормальный режим
и режим удержания направления. Есть
поддержка цифровых сервомашинок.
Режим и чувствительность задаются
с дополнительного канала
приемника. Такие параметры как
реверс, DS и расходы сервомашинок
задаются через установочный режим
(quick setup) с передатчика. Ведутся
полетные логи в энергонезависимой
памяти. Есть канал связи с РС. На
текущий момент не реализовано:
программирование продвинутых
параметров через RS232. Руководство
пользователя (пока только меня)
Объем кода
составил около 6 кБайт. На текущий
момент реализован нормальный режим
и режим удержания направления. Есть
поддержка цифровых сервомашинок.
Режим и чувствительность задаются
с дополнительного канала
приемника. Такие параметры как
реверс, DS и расходы сервомашинок
задаются через установочный режим
(quick setup) с передатчика. Ведутся
полетные логи в энергонезависимой
памяти. Есть канал связи с РС. На
текущий момент не реализовано:
программирование продвинутых
параметров через RS232. Руководство
пользователя (пока только меня)
Решаем проблему номер три (тестирование)
Перспектива
делать первый взлет с самодельным
гироскопом на большом страшном
Рапторе мне как-то не очень
нравилась. К счастью, к этому
времени у меня появился
электрический TRex-450SA, а с ним
проводить испытания было удобно и
не страшно (его при необходимости
даже можно было держать в руке). В
первых испытаниях участвовала
сервомашинка Futaba S3154. Поведение
аппарата в полете сравнивалось с
GY240 и GY401 субъективно и по логам.
Нормальный режим сразу нормально
заработал и с пристрастием не
анализировался. В режиме удержания:
дрейф азимута от времени при
висении в нормале (~2400 об/мин) – около
5-10 градусов/мин против 15-20 градусов
GY240. Виляние хвостом при резком
добавлении-сбросе газа в режиме
обычной сервы – 20-25 градусов, как у
самоделки, так и в 240 и 401, но в
самоделке наблюдались некоторые
колебания при возвращении хвоста. В
режиме цифровой сервы (DS) самоделка
мне понравилась больше, чем 401
(меньше виляние и колебания при
резком бросании раддера), но,
возможно, это субъективно.
По-любому, эффективности ХР не
хватало, чтобы адекватно
компенсировать набросы шага/газа. В
Idle-up (~2900 об/мин) и DS хвост был “как
прибитый” как на самоделке, так и
на GY401.
В
первых испытаниях участвовала
сервомашинка Futaba S3154. Поведение
аппарата в полете сравнивалось с
GY240 и GY401 субъективно и по логам.
Нормальный режим сразу нормально
заработал и с пристрастием не
анализировался. В режиме удержания:
дрейф азимута от времени при
висении в нормале (~2400 об/мин) – около
5-10 градусов/мин против 15-20 градусов
GY240. Виляние хвостом при резком
добавлении-сбросе газа в режиме
обычной сервы – 20-25 градусов, как у
самоделки, так и в 240 и 401, но в
самоделке наблюдались некоторые
колебания при возвращении хвоста. В
режиме цифровой сервы (DS) самоделка
мне понравилась больше, чем 401
(меньше виляние и колебания при
резком бросании раддера), но,
возможно, это субъективно.
По-любому, эффективности ХР не
хватало, чтобы адекватно
компенсировать набросы шага/газа. В
Idle-up (~2900 об/мин) и DS хвост был “как
прибитый” как на самоделке, так и
на GY401. В общем, первые же полеты
показали, что проект можно было
признать успешным. Дальше были
некоторые доработки и улучшения. В
частности, мне удалось уменьшить
дрейф азимута до 1-2 градусов в
минуту.
В общем, первые же полеты
показали, что проект можно было
признать успешным. Дальше были
некоторые доработки и улучшения. В
частности, мне удалось уменьшить
дрейф азимута до 1-2 градусов в
минуту.
Резюме
Сделать хороший самодельный гироскоп можно.
И немного о грустном
Из всего
вышесказанного можно сделать
вывод, что у меня было все
совершенно безоблачно и
замечательно. На самом деле были и
проблемы. Во-первых, сервомашинка
S3154 довольно быстро сдохла, где-то в
пятом-шестом полете. (Причем прямо в
полете!) И я не могу сказать, кто
виноват в ее преждевременной
кончине – лично я или известный ее
производитель. Конечно, кругом
много жалоб на долговечность S3154, но
чувство вины и скорби все же не
покидает меня. (Теперь на хвосте
Трекса стоит обычная аналоговая HS-55
и, кстати, нам с ней летается очень
неплохо).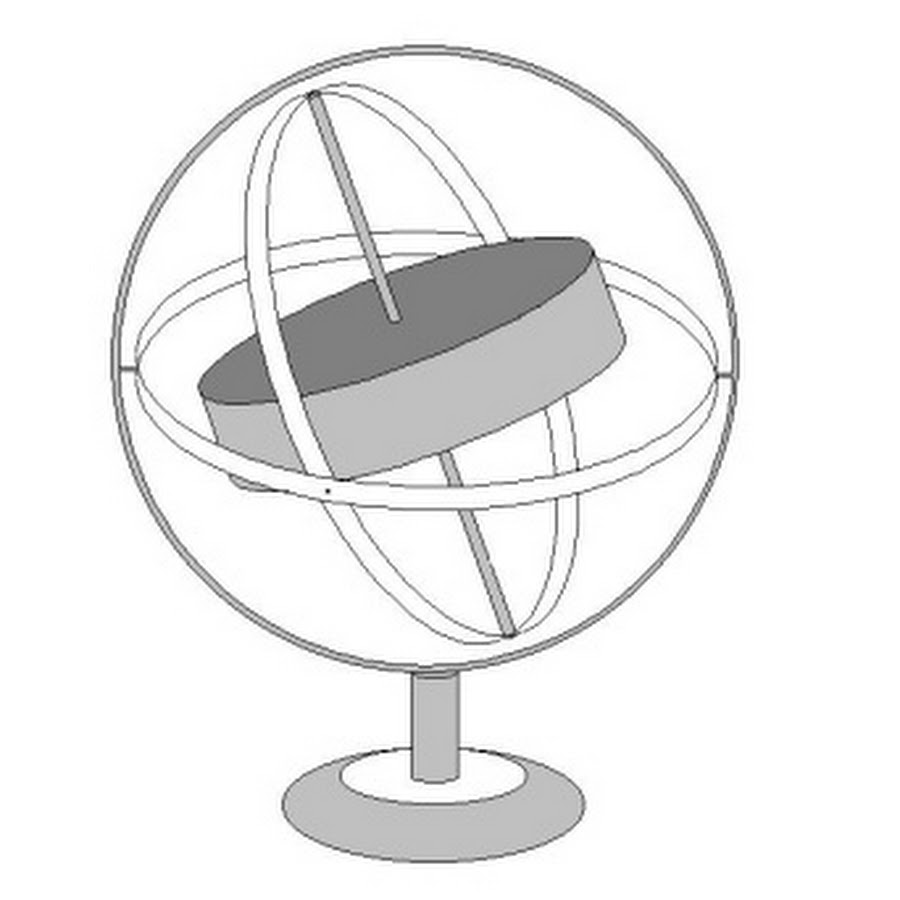
Обсуждение проекта на rcdesign.ru (впрочем, ничего конструктивного)
© Вадим Кушнир (aka Vad64)
На главную страницу
Гироскоп Hobby King 401B
Гироскоп Hobby King 401B является клоном гироскопа Futaba GY401.
Производителем позиционируется как вертолетный гироскоп с функцией dual rateи head lock. В HK401B применяется AVCS (Vector Control System), что делает его более устойчивым. AVCS система с легкостью компенсирует дрожание руля от ветра и различных погодных условий, что делает его идеальным для 3D полетов.
HK401B очень хорошо зарекомендовал себя и на самолетах. В основном устанавливается на элероны и РВ. При такой установке обеспечивается максимальная устойчивость и стабильность полета в очень сильный ветер.
В основном устанавливается на элероны и РВ. При такой установке обеспечивается максимальная устойчивость и стабильность полета в очень сильный ветер.
Установка на бикслере
При эксплуатации на самолете, чтобы не допустить включения режима удержания, необходима в настройках передатчика сделать ограничении по каналу чувствительности гироскопа.
Воодушевившись отзывами друзей, сделал заказ. Через месяц ожидания, я стал владельцем данного девайса. Но моя радость была не долгой. Каждый второй взлет с гироскопом заканчивался падением. Самолет самопроизвольно делал сложные маневры, и уходил в штопор.
Почитав отзыва и темы на форуме был сделан вывод, что у этого гироскопа слабые переключатели режимов реверса и типа сервы.
Снята крышка
При попытке выпаять, поддел кончиком канцелярского ножа, переключатель без паяльника отвалился от платы.
На реверс впаял перемычку.
Красным отмечено место, где был выключатель, и перемычка на реверс.
Ещё забыл добавить, при сборке очень не понравилось, что нет ни какого уплотнения внутри корпуса гиры, и плата всеми своими элементами трется об корпус. Как раз той стороной, где переключатели. Ни чего лучше не придумал, как вырезать тонкие прокладки из канцелярского ластика, и положить их между корпусом и платой (на фото синие прямоугольники).
Провел облет модернизированного гироскопа в ветер 2-4 м/с.Отлетал 30 минут никакого намека на сбои.
Скорее всего, был брак в переключателях.
Если у вас появляются похожие проблемы, проверяйте выключатели!
Посмотрите этот потрясающий настольный гироскоп, сборка
Гироскопы играют огромную роль в нашей повседневной жизни. В самолетах, судоходстве и даже в наших смартфонах и игровых контроллерах. Однако по большей части мы редко видим их в действии. Обычно они скрыты от глаз, глубоко внутри механизма.
Поэтому, когда мы видим их, мы обычно поражаемся их удивительному поведению, бросающему вызов гравитации.
Это может быть хорошо известный физический феномен, но гироскопический эффект настолько противоречит интуиции, что ничто не может подготовить вас к удивлению, когда вы изящно увидите фунт вращающихся металлических весов на кончике пальца.
В этом проекте я покажу вам, как создать собственный высокоточный гироскоп, который не только отлично работает, но и станет довольно впечатляющим украшением рабочего стола.
Я буду использовать широкий спектр методов обработки металла, используя как токарный станок, так и фрезерное сверло, а также покажу, где вы можете легко найти необходимые материалы.
Если вы только начинаете создавать свою собственную механическую мастерскую, у вас может не быть некоторых инструментов, которые обычно использовались бы для изготовления чего-то подобного. Итак, я покажу вам несколько полезных советов и уловок, чтобы все же получить детали, используя гораздо более простые методы.
Итак, я покажу вам несколько полезных советов и уловок, чтобы все же получить детали, используя гораздо более простые методы.
Большая часть резки на токарном станке выполняется с использованием интересного «универсального токарного инструмента», который может резать как слева, так и справа, и я также покажу вам уникальный способ использования цианоакрилата для удержания неудобных деталей, а также в качестве прохладного инструмента. bump ‘инструмент для грубой центровки круглой заготовки на патроне.
Гироскопы– действительно удивительные устройства, и как проект для домашней механической мастерской они действительно не намного лучше этого.
Если у вас есть подходящие инструменты и вы хотите заняться созданием собственного гироскопа, я предоставил файлы для проектирования как в британских, так и в метрических единицах измерения.
Использование Blender для создания виртуального гироскопа
Использование Blender для создания виртуального гироскопаУчебное пособие по гироскопу Blender
Blender – это программа с открытым исходным кодом, которая может создавать фотореалистичные изображения как на Mac, так и на ПК. Программа доступна на
www.blender.org
Помимо создания фотореалистичных изображений, Blender может использоваться для моделирования законов
физика в реальном времени для простых взаимодействий с объектами.В этом уроке мы узнаем, как использовать Blender 2.49b для создания виртуального гироскопа.
Программа доступна на
www.blender.org
Помимо создания фотореалистичных изображений, Blender может использоваться для моделирования законов
физика в реальном времени для простых взаимодействий с объектами.В этом уроке мы узнаем, как использовать Blender 2.49b для создания виртуального гироскопа.
Главное окно, к которому мы чаще всего будем обращаться в этом руководстве, – это окно 3D view . Это окно, которое показывает
предварительный просмотр объектов, моделируемых в Blender, в 3D. По умолчанию внизу этого окна есть строка меню с номером
заголовков, таких как «Просмотр», «Выбрать» и «Объект», а также ряд значков. Прямо под окном 3D View находится Окно кнопок , которое отображает несколько различных меню.Часто можно упростить расположение кнопок меню в окне
щелкнув одно из меню, а затем нажав кнопку & ltHOME & gt. В окне кнопок есть строка меню с рядом расположенных значков.
вверху строки меню. Мы будем использовать три таких значка: значок PacMan выбирает меню логики / игры. Это также может быть
доступ к нему осуществляется нажатием клавиши & ltF4 & gt. Серая сфера Значок выбирает меню затенения. Используется для добавления цветов и текстур.
к различным объектам сцены.В это меню также можно попасть, нажав клавишу & ltF5 & gt. В координатные стрелки Значок выбирает объект меню. Мы будем использовать это меню, чтобы ограничить движение объектов в сцене.
В это меню также можно попасть, нажав клавишу & ltF7 & gt. Когда вы выбираете определенные значки окна кнопок, различные другие
появятся значки.
Это также может быть
доступ к нему осуществляется нажатием клавиши & ltF4 & gt. Серая сфера Значок выбирает меню затенения. Используется для добавления цветов и текстур.
к различным объектам сцены.В это меню также можно попасть, нажав клавишу & ltF5 & gt. В координатные стрелки Значок выбирает объект меню. Мы будем использовать это меню, чтобы ограничить движение объектов в сцене.
В это меню также можно попасть, нажав клавишу & ltF7 & gt. Когда вы выбираете определенные значки окна кнопок, различные другие
появятся значки.
Давайте теперь воспользуемся Blender для построения нашего гироскопа шаг за шагом.
- Blender запускается с объектом по умолчанию (кубом) в центре трехмерного вида.Введите “s0.1 & ltENTER & gt” для масштабирования куба до одной десятой его исходного размера, где «& ltENTER & gt» – это кнопка ввода.
- Нажмите «n», чтобы открыть окно Transform Properties . Щелкните запись «OB» (объект) в свойствах преобразования.
 окно и переименуйте объект с «Куб» в «Сводная точка». Убедитесь, что координаты положения точки поворота ( x, y, z ) расположены на
(0,0,0).
окно и переименуйте объект с «Куб» в «Сводная точка». Убедитесь, что координаты положения точки поворота ( x, y, z ) расположены на
(0,0,0). - В верхней части экрана находится строка меню Preference .Щелкните Add >> Mesh >> Cube , чтобы добавить еще один куб в сцену.
Введите «s0.1 & ltENTER & gt», чтобы снова масштабировать куб с коэффициентом десятой. В окне свойств преобразования щелкните значок
“ScaleX” и измените его на 2. Вы можете изменить значение, щелкнув справа от “ScaleX”, и тогда все число должно
быть выделенным. Введите новое значение (2) и нажмите & ltENTER & gt. Теперь кубик должен быть растянут в стержень. Назовите
стержень “Axel” и переместите его в (2,0,0), установив LocX = 2, LocY = 0, LocZ = 0.Наконец, в меню 3D вида нажмите Объект >> Очистить / Применить >> Применить масштаб / поворот к данным об объекте . Это отрегулирует внутреннюю структуру данных акселя, чтобы разрешить
другие предметы должны быть правильно прикреплены.

- Перейдите в меню 3D и щелкните View >> Camera , чтобы просмотреть сцену с точки зрения виртуальной камеры. Нажмите на 3D-вид
окна и нажмите «& ltALT & gt z», чтобы включить отображение текстуры в 3D-окне. Нажмите кнопку «p», чтобы «сыграть» в игру, или
нажмите Игра >> Начать игру в меню настроек.Вы должны увидеть, как аксель и ось парят в воздухе в окружении
синий фон. Это потому, что оба эти элемента статичны: они не двигаются. Хотя ось должна оставаться неподвижной,
аксель должен быть подвижным. Нажмите кнопку «& ltESC & gt», чтобы остановить «игру».
Щелкните правой кнопкой мыши аксель, чтобы выбрать ее, затем щелкните значок логики (значок pacman). В левом верхнем углу
В окне логики есть поле с надписью «Статический». Щелкните «Статический» и измените его на «Жесткое тело».” Нажмите на
кнопку «Без сна», чтобы выделить его (он будет закрашен более темным цветом) и установите для «Damp» и «RotDamp» нулевое значение.
Щелкните окно 3D вида и нажмите «p» для воспроизведения.
 Теперь вы должны увидеть, как аксель падает под действием силы тяжести.
Нажмите кнопку «& ltESC & gt», чтобы остановить игру.
Теперь вы должны увидеть, как аксель падает под действием силы тяжести.
Нажмите кнопку «& ltESC & gt», чтобы остановить игру. - В меню кнопок щелкните значок «Объект» (стрелки осей координат), а затем нажмите кнопку «Добавить ограничение» в окно ограничений.Выберите «Соединение жесткого тела», и откроется окно «Соединение жесткого тела». Нам нужен шарнир твердого тела “Шар”. который представляет собой шарнирное соединение, которое позволяет оси как вращаться, так и вращаться. В окне ограничения введите “Pivot” в “toObject”. поле значения. Выделите как «Без столкновений», так и «Показать точку поворота». Теперь вы должны увидеть, что в центре оси появилась система координат поворота. Установите значение «Pivot X» на -2 и оставьте для «Pivot Y» и «Pivot Z» значение 0. Вернитесь в окно 3D вида и введите «p»: теперь ось должна быть качаться как маятник.Нажмите кнопку «& ltESC & gt», чтобы остановить игру.
- Перейдите в меню 3D и щелкните Вид >> Сверху .
 В меню предпочтений нажмите Добавить >> Сетка >> Цилиндр .
Выберите радиус 0,5, глубину 0,01 и нажмите «ОК». В окне должен появиться диск. Переименуйте цилиндр в «Маховик» и нажмите
значок затенения (серая сфера). В разделе «Ссылка на объект» нажмите кнопку «Добавить». В окне кнопок должно появиться большое количество панелей.
включая окно предварительного просмотра, показывающее сферу, украшенную текущей текстурой.Мы хотим использовать более интересную текстуру для маховика, например
этот образец “колеса Бенхама”
В меню предпочтений нажмите Добавить >> Сетка >> Цилиндр .
Выберите радиус 0,5, глубину 0,01 и нажмите «ОК». В окне должен появиться диск. Переименуйте цилиндр в «Маховик» и нажмите
значок затенения (серая сфера). В разделе «Ссылка на объект» нажмите кнопку «Добавить». В окне кнопок должно появиться большое количество панелей.
включая окно предварительного просмотра, показывающее сферу, украшенную текущей текстурой.Мы хотим использовать более интересную текстуру для маховика, например
этот образец “колеса Бенхама”Мы можем применить этот шаблон, выбрав «значок меню текстуры» (значок рисунка леопарда непосредственно справа от значка красной сферы) и затем нажмите кнопку «Добавить» в окне «Текстура». В окне «Текстура» измените «Тип текстуры» с «Нет» на «Изображение». Картинка появится меню. Нажмите кнопку «Загрузить», и появится меню файла.Перейдите в каталог, в котором вы сохранили изображение колеса Бенхама. Щелкните имя «benham.png», а затем нажмите кнопку «ВЫБРАТЬ ИЗОБРАЖЕНИЕ» в правом верхнем углу окна меню файла.
 Изображение загружено, но мы
нужно правильно отцентрировать его на колесе. Щелкните значок «Кнопка материалов» (красная сфера) и перейдите на вкладку «Ввод карты». Набор “ofsX”, “ofsY”,
и «ofsZ» все равно 0,5. «ofsX» – это смещение по оси X, которое указывает, где разместить угол изображения.По умолчанию угол
изображения в центре объекта. Мы хотим, чтобы угол изображения находился в углу объекта, поэтому смещение отличное от нуля. Кстати,
выделенная кнопка «Orco» означает, что изображение размещается в соответствии с КООРДИНАТАМИ ИСХОДНОГО объекта.
Изображение загружено, но мы
нужно правильно отцентрировать его на колесе. Щелкните значок «Кнопка материалов» (красная сфера) и перейдите на вкладку «Ввод карты». Набор “ofsX”, “ofsY”,
и «ofsZ» все равно 0,5. «ofsX» – это смещение по оси X, которое указывает, где разместить угол изображения.По умолчанию угол
изображения в центре объекта. Мы хотим, чтобы угол изображения находился в углу объекта, поэтому смещение отличное от нуля. Кстати,
выделенная кнопка «Orco» означает, что изображение размещается в соответствии с КООРДИНАТАМИ ИСХОДНОГО объекта.Щелкните окно 3D вида, нажмите «p», и теперь вы должны увидеть маховик с правильно отцентрованным рисунком колеса Бенхама.
- Увеличьте маховик, щелкнув его правой кнопкой мыши, чтобы выбрать его, и набрав «s8 & ltENTER & gt».Нажмите Вид >> Спереди и поверните маховик на 90 градусов, набрав «r90 & ltENTER & gt». Используйте окно “Свойства преобразования”, чтобы задать положение координат.
маховика на (4,0,0).
 Маховик теперь правильно ориентирован для крепления к оси.
Маховик теперь правильно ориентирован для крепления к оси. - Теперь нам нужно превратить маховик в физически мобильный объект. Щелкните значок логики и сделайте маховик твердым телом с массой 10. Как и в случае с акселем, установите Damp и RotDamp на ноль и выделите «Нет сна».Также нажмите кнопку «Границы» и измените «Границы столкновения» с «Коробка» к «Цилиндру». Нажмите на окно 3D вида и нажмите «p», чтобы играть. Вы должны увидеть, как ось качается, как маятник, а маховик падает, как камень.
- Теперь нам нужно подключить маховик. Щелкните правой кнопкой мыши маховик, чтобы выбрать его, затем удерживайте клавишу «& ltSHIFT & gt» и
щелкните правой кнопкой мыши по оси, чтобы выбрать ее. В окне 3D вида щелкните Object >> Parent >> Make Parent .
Появится окно подтверждения спрашивая, хотите ли вы сделать (аксель) родителем (маховика). Нажмите «Сделать родителем», чтобы подтвердить это решение. Если вы сейчас нажмете Кнопка «p», вы должны увидеть, как маховик качается с осью как часть составного маятника.

- Мы создали гироскоп, который действует как маятник. Но на самом деле нам нужен вращающийся гироскоп. Щелкните правой кнопкой мыши по оси, чтобы выбрать
его, а затем щелкните значок кнопки логики.В разделе «Датчики» нажмите кнопку «Добавить», чтобы создать датчик Axel. Убедитесь, что
Датчик является датчиком «Всегда», и нажмите «Нажать», чтобы выделить его. Затем в разделе «Контроллеры» нажмите кнопку «Добавить», чтобы создать контроллер Axel.
Убедитесь, что контроллер является контроллером «И». В разделе «Приводы» нажмите кнопку «Добавить», чтобы создать привод Axel. Выберите
Привод «Движение» и выберите «Простое движение». Установите компоненты AngV (угловой скорости) на (100, 0, 0) и нажмите кнопку «L», чтобы выбрать
местные координаты.Наконец, нарисуйте провод, соединяющий выход датчика Alex со входом контроллера Axel, а второй провод
с выхода контроллера Axel на вход исполнительного механизма Axel.
При таком расположении гироскоп запускается с “касания”, которое дает ему 100 единиц угловой скорости вокруг оси x, а затем позвольте гироскопу свободно двигаться без какой-либо другой силы (кроме силы тяжести) с этого момента.
 Вы можете проверить это, нажав Просмотр >> Камера , а затем нажмите клавишу «p».Теперь вы должны сначала увидеть прецессию гироскопа с небольшой степенью нутации.
Вы можете проверить это, нажав Просмотр >> Камера , а затем нажмите клавишу «p».Теперь вы должны сначала увидеть прецессию гироскопа с небольшой степенью нутации.
Поздравляем! Вы сделали виртуальный гироскоп! Теперь вы можете провести несколько простых экспериментов на своем гироскопе. Например, что произойдет, если вы измените скорость вращения со 100 радиан в секунду на 10 радиан в секунду? Что произойдет, если попадет другой объект гироскоп как крутится? Создайте еще один куб и бросьте его на гироскоп, чтобы узнать.
Вы можете скачать готовый файл .blend (с добавлением дополнительных ламп для лучшего освещения гироскопа) нажав на эту ссылку.
Синтез контроллеров и клинические исследования переносных гироскопических приводов для поддержания баланса человека
Скотт В., Пирс, М. и Пенджелли, К. Смертность в результате падений среди канадцев в возрасте 65 лет и старше. Public Heal. Агентство Канада, Тех. Реп (2005).
Реп (2005).
Хаусдорф, Дж. М., Риос, Д. А. и Эдельберг, Х. К. Изменчивость походки и риск падений у пожилых людей, проживающих в сообществе: годичное проспективное исследование. Arch. Phys. Медицинская реабилитация 82 , 1050–1056, https://doi.org/10.1053/apmr.2001.24893 (2001).
CAS Статья Google ученый
Симпсон, Л. А., Миллер, В. К. и Энг, Дж. Дж. Влияние инсульта на частоту падений, местонахождение и предикторы: перспективное сравнение пожилых людей с инсультом и без него. Plos One 6 , e19431, https://doi.org/10.1371/journal.pone.0019431 (2011).
ADS CAS Статья PubMed PubMed Central Google ученый
Weerdesteyn, V., Niet, M., Duijnhoven, H. & Geurts, A. Падения у лиц с инсультом , vol. 45 (2008).
Фуллер Г. Ф. Падает в пожилом возрасте. г. Семейный врач 61 , 2159 (2000).
Семейный врач 61 , 2159 (2000).
CAS Google ученый
Verheyden, G. S. et al. . Вмешательства для предотвращения падений людей после инсульта. В Кокрановская библиотека , https://doi.org/10.1002/14651858.CD008728.pub2 (John Wiley & Sons, Ltd, 2013).
Geurts, A.C., de Haart, M., van Nes, I.J. и Duysens, J. Обзор восстановления равновесия стоя после инсульта. Поза походки 22 , 267–281, https: // doi.org / 10.1016 / j.gaitpost.2004.10.002 (2005).
Артикул PubMed Google ученый
Миньярдо, Ж.-Б. и др. . Алгоритм разнонаправленной гравитационной помощи, улучшающий локомоторный контроль у пациентов с инсультом или травмой спинного мозга. Sci. Пер. Med. 9 , eaah4621, https://doi.org/10.1126/scitranslmed.aah4621 (2017).
Артикул PubMed Google ученый

Фрей, М. и др. . Новая мехатронная система поддержки веса тела. IEEE Trans. Neural Syst. РеабилитацияEng. 14 , 311–321, https://doi.org/10.1109/TNSRE.2006.881556 (2006).
Артикул Google ученый
Висс, Д., Бартенбах, В., Пенникотт, А., Ринер, Р. и Валлери, Х. Расширение системы поддержки веса тела для контроля боковых сил: реализация и проверка. В 2014 Международная конференция IEEE по робототехнике и автоматизации (ICRA) , 328–332, https: // doi.org / 10.1109 / ICRA.2014.6
0 (2014).
Wyss, D., Pennycott, A., Bartenbach, V., Riener, R. & Vallery, H. Многогранный совместимый разъединенный привод (MUCDA) для поддержки таза во время походки. IEEE / ASME Trans. Мехатрон. 24 , 164–174, https://doi.org/10.1109/TMECH.2018.2878289 (2019).
Артикул Google ученый
Hidler, J. et al. . ZeroG: наземная система тренировки ходьбы и равновесия. J. реабилитация Res. Dev. 48 , 287–298 (2011).
. ZeroG: наземная система тренировки ходьбы и равновесия. J. реабилитация Res. Dev. 48 , 287–298 (2011).
Артикул Google ученый
Plooij, M. et al. . Конструкция RYSEN: искробезопасная и маломощная трехмерная наземная опора веса тела. IEEE Robot. Автомат. Lett. 3 , 2253–2260, https://doi.org/10.1109/LRA.2018.2812913 (2018).
Артикул Google ученый
Валлери, Х. и др. . Разнонаправленная прозрачная поддержка для тренировки походки на земле. В 2013 13-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) , 1–7, https://doi.org/10.1109/ICORR.2013.6650512 (2013).
Паттон, Дж. и др. . KineAssist: Проектирование и разработка наземного роботизированного устройства для терапии походки и равновесия. Верх. Реабилитация после инсульта 15 , 131–139, https://doi. org/10.1310/tsr1502-131 (2008).
org/10.1310/tsr1502-131 (2008).
Артикул Google ученый
Асбек, А. Т., Де Росси, С. М., Холт, К. Г. и Уолш, К. Дж. Мягкий экзокостюм с биологическими мотивами для помощи при ходьбе. Внутр. J. Робот. Res. 34 , 744–762, https://doi.org/10.1177/02783642476 (2015).
Артикул Google ученый
Ли, Д. и Валлери, Х. Гироскопическая помощь для поддержания равновесия человека.В 2012 12-й Международный семинар IEEE по Advanced Motion Control (AMC) , 1–6, https://doi.org/10.1109/AMC.2012.6197144 (2012).
Шумахер К. и др. . Двусуставные мышцы наиболее чувствительны к возмущениям высоты звука верхней части тела при стоянии человека. Sci. Реп. 9 , 1–14, https://doi.org/10.1038/s41598-019-50995-3 (2019).
ADS CAS Статья Google ученый
Мацузаки Р. и Фудзимото Ю. Вспомогательное устройство при ходьбе с использованием гироскопов контрольного момента. В IECON 2013 – 39-я ежегодная конференция Общества промышленной электроники IEEE , 6581–6586, https://doi.org/10.1109/IECON.2013.6700220 (2013).
Romtrairat, P., Virulsri, C. & Tangpornprasert, P. Применение гироскопов управления моментом с ножницами в конструкции носимого устройства помощи равновесию для пожилых людей. J. Biomech. 87 , 183–188, https: // doi.org / 10.1016 / j.jbiomech.2019.03.015 (2019).
Артикул PubMed Google ученый
Джабин, С., Берри, А., Гейтенбек, Т., Харлаар, Дж. И Валлери, Х. Вспомогательная походка со свободными или суставными моментами на маховой ноге. В 2019 16-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) , 1079–1084, https://doi.org/10.1109/ICORR.2019.8779389 (IEEE, Торонто, Онтарио, Канада, 2019).
Лемус, Д., ван Франкенхайзен, Дж. И Валлери, Х. Разработка и оценка гироскопа для управления моментом баланса. J. Механизмы Робот. 9 , 051007–051007–9, https://doi.org/10.1115/1.4037255 (2017).
Артикул Google ученый
Чиу, Дж. И Госвами, А. Разработка переносного гироскопа с парным ножничным управлением для управления моментом (SP-CMG) для помощи в поддержании равновесия человека. В том 5A: 38-я конференция по механизмам и робототехнике , V05AT08A023, https: // doi.org / 10.1115 / DETC2014-35539 (Американское общество инженеров-механиков, Буффало, Нью-Йорк, США, 2014 г.).
Оя, Х. и Фудзимото, Ю. Предварительные эксперименты по контролю осанки с использованием носимых CMG. В IECON 2017 – 43-я ежегодная конференция Общества промышленной электроники IEEE , 7602–7607, https://doi.org/10.1109/IECON.2017.8217332 (2017).
Широта К. и др. . Роботизированная оценка равновесия при стоянии и ходьбе. J. Neuroeng. Реабилитация 14 , 80, https://doi.org/10.1186/s12984-017-0273-7 (2017).
и др. . Роботизированная оценка равновесия при стоянии и ходьбе. J. Neuroeng. Реабилитация 14 , 80, https://doi.org/10.1186/s12984-017-0273-7 (2017).
Артикул Google ученый
Брюйн, С. М., Мейер, О. Г., Бик, П. Дж. И ван Дин, Дж. Х. Оценка стабильности передвижения человека: обзор текущих мер. J. R. Soc. Интерфейс 10 , 20120999, https://doi.org/10.1098/rsif.2012.0999 (2013).
CAS Статья PubMed PubMed Central Google ученый
Прието, Т. Е., Майклбуст, Дж. Б., Хоффманн, Р. Г., Ловетт, Э. Г. и Майклбуст, Б. М. Меры устойчивости позы: различия между здоровыми молодыми и пожилыми людьми. IEEE Trans. Биомед. Англ. 43 , 956–966, https://doi.org/10.1109/10.532130 (1996).
CAS Статья PubMed Google ученый
Mombaur, K. et al. . Глава 4 – Контроль за движением и соблюдением требований. В Шарбафи М.А. и Сейфарт, А. (ред.) Bioinspired Legged Legged Locomotion , 135–346, https://doi.org/10.1016/B978-0-12-803766-9.00006-3 (Butterworth-Heinemann, 2017).
et al. . Глава 4 – Контроль за движением и соблюдением требований. В Шарбафи М.А. и Сейфарт, А. (ред.) Bioinspired Legged Legged Locomotion , 135–346, https://doi.org/10.1016/B978-0-12-803766-9.00006-3 (Butterworth-Heinemann, 2017).
Ньюэлл К., ван Эммерик Р., Ли Д. и Спраг Р. О стабильности и изменчивости позы. Походка 1 , 225–230, https://doi.org/10.1016/0966-6362(93)-B (1993).
Артикул Google ученый
Visser, J.Э., Карпентер, М. Г., ван дер Кой, Х. и Блум, Б. Р. Клиническая полезность постурографии. Clin. Neurophysiol. 119 , 2424–2436, https://doi.org/10.1016/j.clinph.2008.07.220 (2008).
Артикул PubMed Google ученый
Pasma, J. et al. . Нарушение равновесия стоя: клиническая необходимость замкнуть петлю. Neuroscience 267 , 157–165, https: // doi. org / 10.1016 / j.neuroscience.2014.02.030 (2014).
org / 10.1016 / j.neuroscience.2014.02.030 (2014).
CAS Статья PubMed Google ученый
Шауб, Х., Вадали, С. Р. и Джанкинс, Дж. Л. Закон управления с обратной связью для гироскопов с регулируемым моментом. Журнал астронавтических наук 46 , 307–328 (июль-Спет 1998).
Мерфельд, Д. М., Зупан, Л. и Петерка, Р. Дж. Люди используют внутренние модели для оценки силы тяжести и линейного ускорения. Nature 398 , 615–618, https://doi.org/10.1038/19303 (1999).
ADS CAS Статья PubMed Google ученый
Хорак, Ф. Б. и Нашнер, Л. М. Центральное программирование постуральных движений: адаптация к измененным конфигурациям опорной поверхности. J. Neurophysiol. 55 , 1369–1381, https://doi.org/10.1152/jn.1986.55.6.1369 (1986).
CAS Статья PubMed Google ученый

Ву М., Браун Г. и Гордон К. Э. Контроль стабильности опорно-двигательного аппарата в стабилизирующей и дестабилизирующей среде. Поза походки 55 , 191–198, https://doi.org/10.1016/j.gaitpost.2017.04.021 (2017).
Артикул PubMed Google ученый
Йоханссон, Р., Магнуссон, М. и Акессон, М. Идентификация динамики осанки человека. IEEE Trans. Биомед. Англ. 35 , 858–869, https: // doi.org / 10.1109 / 10.7293 (1988).
CAS Статья PubMed Google ученый
Винтер, Д. А., Патла, А. Е., Принс, Ф., Ишак, М., Джело-Перчак, К. Контроль скованности равновесия при спокойном стоянии. J. Neurophysiol. 80 , 1211–1221, https://doi.org/10.1152/jn.1998.80.3.1211 (1998).
CAS Статья PubMed Google ученый
Петерка, Р. Дж. Сенсомоторная интеграция в постуральном контроле человека. J. Neurophysiol. 88 , 1097–1118, https://doi.org/10.1152/jn.2002.88.3.1097 (2002).
J. Neurophysiol. 88 , 1097–1118, https://doi.org/10.1152/jn.2002.88.3.1097 (2002).
CAS Статья PubMed Google ученый
Мергнер Т. Неврологический взгляд на реактивное управление позой человека. Annu. Rev. Control. 34 , 177–198, https://doi.org/10.1016/j.arcontrol.2010.08.001 (2010).
Артикул Google ученый
Пайман К., Лемус Д., Шорт Д. и Валлери Х. Наблюдение за состоянием равновесия с помощью одного датчика верхней части тела. Frontiers in Robotics and AI 3 , https://doi.org/10.3389/frobt.2016.00011 (2016).
Нёкланд, Х. Дизайн нелинейного наблюдателя для интеграции GNSS и IMU . Диссертация на степень магистра, Норвежский университет науки и технологий, Тронхейм, Норвегия (2011 г.).
Romberg, M. H. Руководство по нервным болезням человека , vol. 2 (Общество Сиденхэма, 1853 г.).
2 (Общество Сиденхэма, 1853 г.).
Берг, К., Вуд-Дофин, С., Уильямс, Дж. И. и Гэйтон, Д. Измерение баланса у пожилых людей: предварительная разработка инструмента. Physiotherapy Canada , https://doi.org/10.3138/ptc.41.6.304 (2009).
Коэн, Х., Блатчли, К. А. и Гомбаш, Л. Л. Исследование клинического теста сенсорного взаимодействия и равновесия. Phys. Ther. 73 , 346–351, https://doi.org/10.1093/ptj/73.6.346 (1993).
CAS Статья PubMed Google ученый
Curtze, C., Hof, A. L., Postema, K. & Otten, B. Сохранение динамического равновесия на протезе: нога, на которой можно стоять? Med. Англ. Phys. 38 , 576–580, https://doi.org/10.1016/j.medengphy.2016.02.013 (2016).
Артикул PubMed Google ученый
Wrisley, D.М., Маркетти, Г. Ф., Кухарский, Д. К., Уитни, С. Л.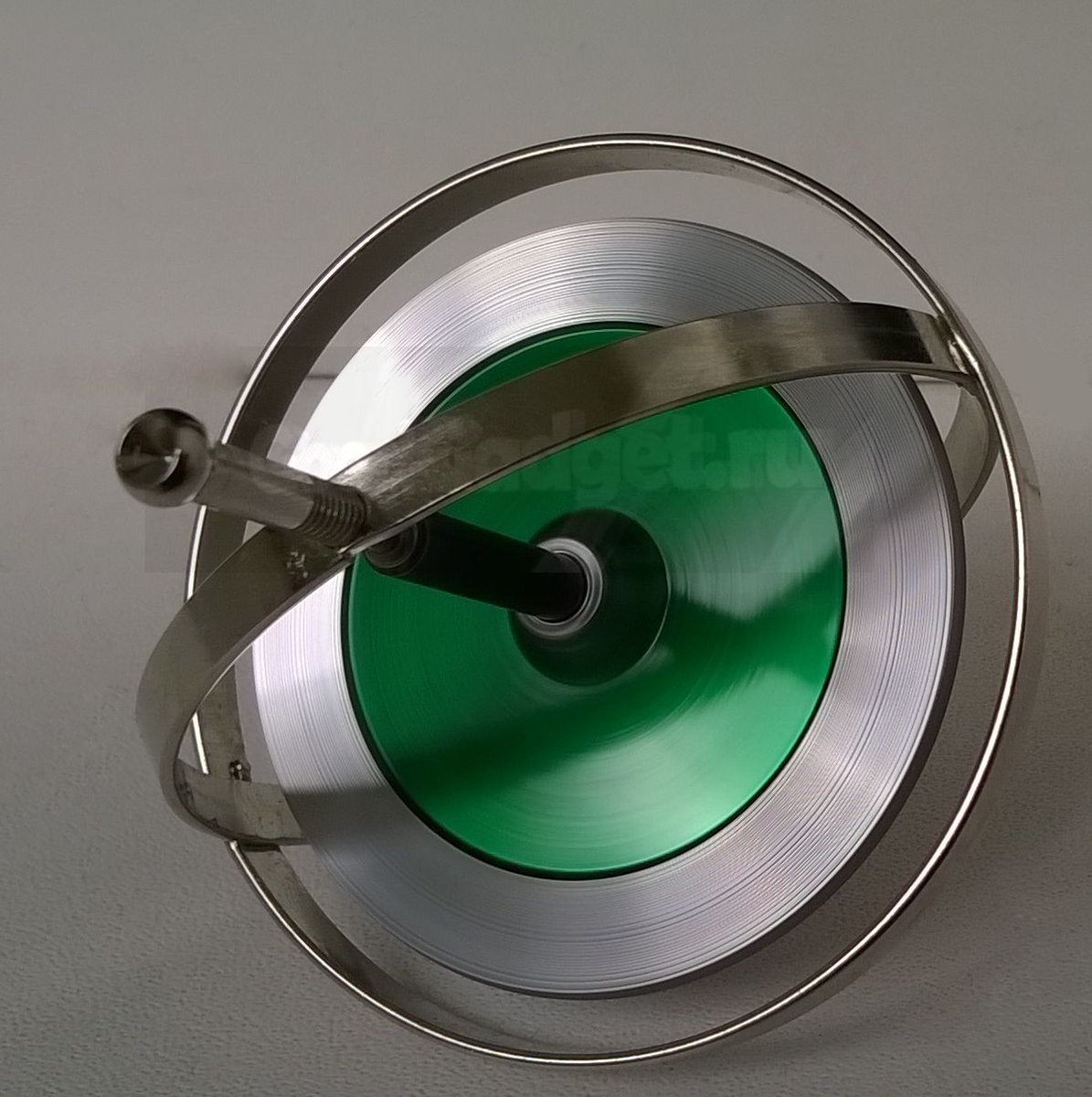 Надежность, внутренняя согласованность и достоверность данных, полученных с помощью оценки функциональной походки. Phys. Ther. 84 , 906–918, https://doi.org/10.1093/ptj/84.10.906 (2004).
Надежность, внутренняя согласованность и достоверность данных, полученных с помощью оценки функциональной походки. Phys. Ther. 84 , 906–918, https://doi.org/10.1093/ptj/84.10.906 (2004).
Артикул PubMed Google ученый
Брюнинкс, Р. Тест Брюнинкса-Осерецкого моторного мастерства: Руководство для экзаменатора (American Guidance Service, 1978).
Villamonte, R. et al. . Надежность 16 тестов на равновесие у людей с синдромом Дауна. Восприятие. Mot. Навыки 111 , 530–542, https://doi.org/10.2466/03.10.15.25.PMS.111.5.530-542 (2010).
Артикул PubMed Google ученый
Спирс, Р. А., Эштон-Миллер, Дж. А., Шульц, А. Б. и Александер, Н. Б. Возрастные различия в способностях выполнять задачи стойки и ходьбы в тандеме различной сложности. Поза походки 7 , 207–213, https://doi. org/10.1016/S0966-6362(98)00006-X (1998).
org/10.1016/S0966-6362(98)00006-X (1998).
CAS Статья PubMed Google ученый
Доминго, А. и Феррис, Д. П. Влияние увеличения погрешности на обучение ходьбе на узкой бревне. Exp. Brain Res. 206 , 359–370, https://doi.org/10.1007/s00221-010-2409-x (2010).
Артикул PubMed Google ученый
Sawers, A. & Hafner, B.J. Сужение луча – это клинически осуществимый подход для оценки способности балансировать у пользователей протезами нижних конечностей. Журнал восстановительной медицины , https://doi.org/10.2340/16501977-2329 (2018).
Csató, L. Ранжирование путем попарного сравнения турниров по швейцарской системе. Cent. Евро. J. Oper. Res. 21 , 783–803, https://doi.org/10.1007/s10100-012-0261-8 (2013).
ADS MathSciNet Статья МАТЕМАТИКА Google ученый
Саати, Т. Л. Как принять решение: процесс аналитической иерархии. евро. J. Operational Res. 48 , 9–26, https://doi.org/10.1016/0377-2217(90)-I (1990).
Артикул МАТЕМАТИКА Google ученый
Армстронг, Р. А. Когда использовать поправку Бонферрони. Офтальмологические физиологические опт. 34 , 502–508, https://doi.org/10.1111/opo.12131 (2014).
Артикул Google ученый
Альтхаус, А. Д. Корректировать для множественных сравнений? Это не так просто. Ann. Грудной. Surg. 101 , 1644–1645, https://doi.org/10.1016/j.athoracsur.2015.11.024 (2016).
Артикул PubMed Google ученый
Streiner, D. L. Лучшие (но часто забываемые) практики: множественные проблемы множественности – можно ли и как исправить многие статистические тесты. г. J. Clin. Nutr. 102 , 721–728, https: // doi.org / 10.3945 / ajcn.115.113548 (2015).
г. J. Clin. Nutr. 102 , 721–728, https: // doi.org / 10.3945 / ajcn.115.113548 (2015).
CAS Статья PubMed Google ученый
Шульц, К. Ф. и Граймс, Д. А. Множественность в рандомизированных испытаниях I: Конечные точки и методы лечения. Lancet 365 , 1591–1595, https://doi.org/10.1016/S0140-6736(05)66461-6 (2005).
Артикул PubMed Google ученый
Ротман, К.J. Никаких корректировок для множественных сравнений не требуется. Эпидемиология 1 , 43–46 (1990).
CAS Статья Google ученый
Ротман, К. Дж. Шесть устойчивых исследовательских заблуждений. J. Gen. Intern. Med. 29 , 1060–1064, https://doi.org/10.1007/s11606-013-2755-z (2014).
Артикул PubMed PubMed Central Google ученый
Perneger, T. V. Что не так с поправками Бонферрони. BMJ 316 , 1236–1238, https://doi.org/10.1136/bmj.316.7139.1236 (1998).
CAS Статья PubMed PubMed Central Google ученый
Маккиннон, К. Д. и Винтер, Д. А. Контроль баланса всего тела во фронтальной плоскости во время ходьбы человека. J. Biomech. 26 , 633–644, https://doi.org/10.1016/0021-9290(93)-C (1993).
CAS Статья PubMed Google ученый
Винтер Д. А. Баланс человека и контроль осанки во время стояния и ходьбы. Поза походки 3 , 193–214, https://doi.org/10.1016/0966-6362(96)82849-9 (1995).
Артикул Google ученый
Винтер, Д. А., Принс, Ф., Франк, Дж. С., Пауэлл, К. и Забжек, К. Ф. Единая теория относительно баланса A / P и M / L в спокойной позе. J. Neurophysiol. 75 , 2334–2343, https://doi.org/10.1152/jn.1996.75.6.2334 (1996).
CAS Статья PubMed Google ученый
Herr, H. & Popovic, M. Угловой момент при ходьбе человека. J. Exp. Биол. 211 , 467–481, https://doi.org/10.1242/jeb.008573 (2008).
Артикул PubMed Google ученый
Hof, A. L. Уравнения движения стоящего человека раскрывают три механизма равновесия. J. Biomech. 40 , 451–457, https://doi.org/10.1016/j.jbiomech.2005.12.016 (2007).
Артикул PubMed Google ученый
Оттен, Э. Балансировка на узком гребне: биомеханика и контроль. Philos. Пер. R. Soc. Лондон. Сер. В: Биол. Sci. 354 , 869–875, https://doi.org/10.1098 / rstb.1999.0439 (1999).
CAS Статья Google ученый
Нашнер, Л. М. и Макколлум, Г. Организация движений позы человека: формальная основа и экспериментальный синтез. Behav. Brain Sci. 8 , 135, https://doi.org/10.1017/S0140525X00020008 (1985).
Артикул Google ученый
Хорак, Ф. Б. Клинические измерения постурального контроля у взрослых. Phys. Ther. 67 , 1881–1885, https://doi.org/10.1093/ptj/67.12.1881 (1987).
CAS Статья PubMed Google ученый
Де Оливейра, К., Де Медейрос, И., Фрота, Н. А., Гретерс, М. Э. и Конфорто, А. Б. Контроль баланса у пациентов с гемипаретическим инсультом: основные инструменты для оценки. J. реабилитация Res. Dev. 45 , 1215–1226 (2008).
Артикул Google ученый
Карпентер М.Г., Франк Дж. С., Адкин А. Л., Патон А. и Аллум Дж. Влияние постуральной тревожности на постуральные реакции на разнонаправленные повороты поверхности. J. Neurophysiol. 92 , 3255–3265, https://doi.org/10.1152/jn.01139.2003 (2004).
CAS Статья PubMed Google ученый
Маки, Б. Э., Холлидей, П. Дж. И Ферни, Г. Р. Модель контроля осанки и тест равновесия для прогнозирования относительной устойчивости позы. IEEE Trans. Биомед. Англ. BME-34 , 797–810, https://doi.org/10.1109/TBME.1987.325922 (1987).
Артикул Google ученый
Карпентер, М. Г., Франк, Дж. С. и Силчер, К. П. Влияние высоты поверхности на контроль осанки: гипотеза стратегии жесткости при стойке. J. Вестиб. Res. 9 , 277–286 (1999).
CAS PubMed Google ученый
Адкин, А. Л., Франк, Дж. С., Карпентер, М. Г. и Пейсар, Г. В. Контроль осанки масштабируется до уровня угрозы осанки. Поза походки 12 , 87–93, https://doi.org/10.1016/S0966-6362(00)00057-6 (2000).
CAS Статья PubMed Google ученый
Адкин А. Л., Франк Дж. С. и Джог М. С. Страх падения и контроль осанки при болезни Паркинсона. Мов. Disord. 18 , 496–502, https: // doi.org / 10.1002 / mds.10396 (2003).
Артикул PubMed Google ученый
Фитцпатрик, Р., Берк, Д. и Гандевия, С. С. Заданные рефлекторные реакции и иллюзии движений, вызванные гальванической вестибулярной стимуляцией у стоящих людей. J. Physiol. 478 , 363–372, https://doi.org/10.1113/jphysiol.1994.sp020257 (1994).
Артикул PubMed PubMed Central Google ученый
Редферн М.С., Ярдли Л. и Бронштейн А.М. Визуальные влияния на равновесие. J. Беспокойство. 15 , 81–94, https://doi.org/10.1016/S0887-6185(00)00043-8 (2001).
CAS Статья PubMed Google ученый
Джека, Дж. Дж. И Лакнер, Дж. Р. Контакт кончика пальца влияет на контроль осанки человека. Exp. Brain Res. 79 , 495–502, https://doi.org/10.1007/BF00229188 (1994).
Артикул Google ученый
Priplata, A. et al. . Улучшенный шумовой контроль баланса человека. Physical Review Letters 89 , https://doi.org/10.1103/PhysRevLett.89.238101 (2002).
Wall, C. & Kentala, E. Контроль раскачивания с помощью вибротактильной обратной связи наклона тела у пациентов с умеренными и тяжелыми нарушениями контроля позы. J. Вестиб. Res. 15 , 313–325 (2005).
PubMed Google ученый
де Соуза, К. Р. и др. . Оценка устойчивости восстановления равновесия от непредсказуемых возмущений по шкале компенсаторных движений рук и ног (CALM). PLOS ONE 14 , e0221398, https://doi.org/10.1371/journal.pone.0221398 (2019).
CAS Статья Google ученый
Афшрифт, М., Йонкерс, И., Де Шуттер, Дж. И Де Гроот, Ф. Механическое усилие предсказывает выбор стратегии голеностопного сустава над бедром при ответных реакциях позы без шага. J. Neurophysiol. 116 , 1937–1945, https://doi.org/10.1152/jn.00127.2016 (2016).
Артикул PubMed PubMed Central Google ученый
Wojtara, T. et al. . Искусственный балансир – поддерживающее устройство для постурального рефлекса. Поза походки 35 , 316–321, https: // doi.org / 10.1016 / j.gaitpost.2011.10.002 (2012).
Артикул PubMed Google ученый
Розенберг, Л. Б. Виртуальные тактильные наложения повышают производительность в задачах телеприсутствия. В Telemanipulator and Telepresence Technologies , vol. 2351, 99–109, https://doi.org/10.1117/12.197302 (Международное общество оптики и фотоники, 1995).
Тайсон, С. Ф., Хэнли, М., Чиллала, Дж., Селли, А.И Таллис, Р. С. Нарушение равновесия после инсульта. Phys. Ther. 86 , 30–38, https://doi.org/10.1093/ptj/86.1.30 (2006).
Артикул PubMed Google ученый
Берри А., Лемус Д., Бабушка Р. и Валлери Х. Направленная сингулярность – надежное управление крутящим моментом для гироскопических приводов. IEEE / ASME Trans. Мехатрон. 21 , 2755–2763, https://doi.org/10.1109/TMECH.2016.2603601 (2016).
Артикул Google ученый
Страмел, Д. М., Каррера, Р. М., Рахок, С. А., Стейн, Дж. И Агравал, С. К. Эффекты светового сенсорного устройства, следующего за человеком, во время прогулки по земле с визуальными возмущениями в среде виртуальной реальности. IEEE Robot. Автомат. Lett. 4 , 4139–4146, https://doi.org/10.1109/LRA.2019.2931267 (2019).
Артикул Google ученый
Чжан, Дж. и др. . Оптимизация помощи экзоскелета при ходьбе без участия человека. Наука 356 , 1280–1284, https://doi.org/10.1126/science.aal5054 (2017).
ADS CAS Статья PubMed Google ученый
Брауэр, С. Г., Вуллакотт, М. и Шамуэй-Кук, А. Взаимодействующие эффекты когнитивного спроса и восстановления постуральной стабильности у пожилых людей с нарушением равновесия. J. Геронтология сер. А: Биол. Sci. Med. Sci. 56 , M489 – M496, https://doi.org/10.1093/gerona/56.8.M489 (2001).
CAS Статья Google ученый
Бонан И. В. и др. . Опора на визуальную информацию после инсульта. Часть I: Баланс динамической постурографии 1 1 Ни одна коммерческая сторона, имеющая прямую финансовую заинтересованность в результатах исследования, поддерживающего эту статью, не имеет или не предоставит выгоду автору (ам) или любой организации, с которой автор (ы) состоит / связаны. Arch. Phys. Med. Реабилитация 85 , 268–273, https://doi.org/10.1016/j.apmr.2003.06.017 (2004).
Артикул Google ученый
Маки, Б. Э., Холлидей, П. Дж. И Топпер, А. К. Страх падения и осанка у пожилых людей. J. Геронтология 46 , M123 – M131, https://doi.org/10.1093/geronj/46.4.M123 (1991).
CAS Статья Google ученый
Laughton, C.A. и др. . Старение, мышечная активность и контроль равновесия: физиологические изменения, связанные с нарушением равновесия. Поза походки 18 , 101–108, https://doi.org/10.1016/S0966-6362(02)00200-X (2003).
Артикул PubMed Google ученый
Бенхуйя, Н., Мельцер, И. и Каплански, Дж. Вызванные старением сдвиги от опоры на сенсорные сигналы к сократению мышц во время равновесия в положении стоя. J. Геронтология сер. А: Биол. Sci. Med. Sci. 59 , M166 – M171, https://doi.org/10.1093/gerona/59.2.M166 (2004).
Артикул Google ученый
Laufer, Y., Sivan, D., Schwarzmann, R. & Sprecher, E. Баланс стоя и функциональное восстановление пациентов с правым и левым гемипарезом на ранних этапах реабилитации. Нейрореабилитация Нейроремонт. 17 , 207–213, https: // doi.org / 10.1177 / 08884359169 (2003).
Артикул PubMed Google ученый
де Хаарт, М., Гертс, А. К., Хайдекопер, С. К., Фасотти, Л. и ван Лимбек, Дж. Восстановление равновесия в положении стоя у пациентов с послеострым инсультом: когортное исследование реабилитации. Arch. Phys. Med. Реабилитация 85 , 886–895, https://doi.org/10.1016/j.apmr.2003.05.012 (2004).
Артикул Google ученый
Хорак Ф., Нашнер Л. и Динер Х. Постуральные стратегии, связанные с соматосенсорной и вестибулярной потерей. Experimental Brain Research 82 , https://doi.org/10.1007/BF00230848 (1990).
Хорак, Ф. Б., Франк, Дж. И Натт, Дж. Влияние дофамина на контроль осанки у паркинсонических субъектов: масштабирование, установка и тонус. J. Neurophysiol. 75 , 2380–2396, https://doi.org/10.1152/jn.1996.75.6.2380 (1996).
CAS Статья PubMed Google ученый
Карпентер, М. Г. Постуральные отклонения от разнонаправленных нарушений осанки при болезни Паркинсона. J. Неврология, Нейрохирургия. Психиатрия 75 , 1245–1254, https://doi.org/10.1136/jnnp.2003.021147 (2004).
CAS Статья Google ученый
Krafczyk, S., Schlamp, V., Dieterich, M., Haberhauer, P. & Brandt, T. Повышенное раскачивание тела с частотой 3,5–8 Гц у пациентов с фобическим постуральным головокружением. Neurosci. Lett. 259 , 149–152, https://doi.org/10.1016/S0304-3940(98)00917-3 (1999).
CAS Статья PubMed Google ученый
Тиссеран, Р., Роберт, Т., Шабо, П., Боннефой, М. и Чез, Л. Пожилые падалицы повышают динамическую устойчивость за счет упреждающих корректировок позы во время реакции выбора шага. Frontiers in Human Neuroscience 10 , https: // doi.org / 10.3389 / fnhum.2016.00613 (2016).
Исида, А., Масуда, Т., Инаока, Х., Фукуока, Ю. Устойчивость вертикального положения человека в зависимости от частоты внешних воздействий. Med. Биол. Англ. Comput. 46 , 213–221, https://doi.org/10.1007/s11517-007-0269-8 (2008).
Артикул PubMed Google ученый
Ченчиарини, М., Лафлин, П. Дж., Спарто, П. Дж. И Редферн, М.С. Повышение жесткости и демпфирования в постуральном контроле с возрастом. IEEE Trans. Биомед. Англ. 57 , 267–275, https://doi.org/10.1109/TBME.2009.2031874 (2010).
Артикул PubMed Google ученый
Morasso, P. G. & Schieppati, M. Может ли жесткость мышц самостоятельно стабилизировать вертикальное положение? J. Neurophysiol. 82 , 1622–1626, https://doi.org/10.1152/jn.1999.82.3.1622 (1999).
CAS Статья PubMed Google ученый
van de Ruit, M., Lataire, J., van der Helm, F. C. T., Mugge, W. & Schouten, A. C. Скорость адаптации в совместной динамике зависит от изменяющихся во времени свойств окружающей среды. 2018 7-я Международная конференция IEEE по биомедицинской робототехнике и биомехатронике (BioRob) 273–278 (2018).
Emken, J. L., Benitez, R. & Reinkensmeyer, D.J. Тренировка кооперативного движения человека и робота: изучение новой сенсомоторной трансформации во время ходьбы с помощью роботов по мере необходимости. J. Neuroeng. Реабилитация 4 , 8, https://doi.org/10.1186/1743-0003-4-8 (2007).
Артикул Google ученый
Валлери, Х., Бегель, А., О’Брайен, К. и Ринер, Р. Дизайн совместного управления для равновесия с помощью роботов во время походки. at – Automatisierungstechnik Methoden und Anwendungen der Steuerungs- . Regelungs- und Informationstechnik 60 , 715–720, https://doi.org/10.1524/auto.2012.1041 (2012).
Артикул Google ученый
Паттон, Дж. Л., Стойков, М. Э., Кович, М. и Мусса-Ивальди, Ф. А. Оценка тренировочных сил роботов, которые либо увеличивают, либо уменьшают ошибки у выживших с хроническим гемипаретическим инсультом. Exp. Brain Res. 168 , 368–383, https://doi.org/10.1007/s00221-005-0097-8 (2006).
Артикул PubMed Google ученый
Mansfield, A. et al. . Предотвращает ли тренировка равновесия на основе нарушений равновесия падения среди людей с хроническим инсультом? Рандомизированное контролируемое исследование. BMJ Open 8 , https://doi.org/10.1136/bmjopen-2018-021510 (2018).
Шинкель-Айви, А., Хантли, А. Х., Акви, А. и Мэнсфилд, А. Улучшает ли тренировка равновесия, основанная на нарушениях, контроль реактивного шага у людей с хроническим инсультом? Дж.Инсульт Цереброваск. Дис. 28 , 935–943, https://doi.org/10.1016/j.jstrokecerebrovasdis.2018.12.011 (2019).
Артикул PubMed Google ученый
Мэнсфилд, А., Вонг, Дж. С., Брайс, Дж., Кнорр, С. и Паттерсон, К. К. Предотвращает ли падение при тренировке равновесия на основе возмущений? Систематический обзор и метаанализ предварительных рандомизированных контролируемых исследований. Phys. Ther. 95 , 700–709, https: // doi.org / 10.2522 / ptj.20140090 (2015).
Артикул PubMed Google ученый
Хорак, Ф. Б., Генри, С. М. и Шамуэй-Кук, А. Постуральные нарушения: новые идеи для лечения нарушений равновесия. Phys. Ther. 77 , 517–533, https://doi.org/10.1093/ptj/77.5.517 (1997).
CAS Статья PubMed Google ученый
Мескерс, К. Г. М., де Гроот, Дж. Х., де Влугт, Э. и Схаутен, А. С. Нейроконтроль движения: подход к идентификации системы для клинической пользы. Frontiers in Integrative Neuroscience 9 , https://doi.org/10.3389/fnint.2015.00048 (2015).
Holewijn, M. Физиологическое напряжение из-за несения нагрузки. евро. J. Appl. Physiol. Ок. Physiol. 61 , 237–245, https://doi.org/10.1007/BF00357606 (1990).
CAS Статья PubMed Google ученый
Шиффман, Дж. М., Бенсель, К. К., Хасселквист, Л., Грегорчик, К. Н. и Писителле, Л. Влияние переносимого веса на произвольное движение и традиционные измерения постурального колебания. Прил. Эргономика 37 , 607–614, https://doi.org/10.1016/j.apergo.2005.10.002 (2006).
Артикул Google ученый
Хеллер, М. Ф., Чаллис, Дж. Х. и Шарки, Н. А. Изменения в осанке как следствие ношения военного рюкзака. Походка и осанка 30 , 115–117, https://doi.org/10.1016/j.gaitpost.2009.02.015 (2009).
Артикул Google ученый
Хоф А. Л., Газендам М. Г. Дж. И Синке В. Э. Условие динамической устойчивости. J. Biomech. 38 , 1–8, https://doi.org/10.1016/j.jbiomech.2004.03.025 (2005).
CAS Статья PubMed Google ученый
Борг, Г.А. Психофизические основы физических нагрузок. Медицина. Спортивные упражнения. 14 , 377–381 (1982).
CAS Google ученый
GLE Гироскоп и направляющие
Наши булавки уравновешивают будущееЧто такое гироскоп, спросите вы? Гироскоп или гироскоп – это устройство, которое вращается вокруг оси. При вращении ориентация тела не влияет на ориентацию оси вращения.Гироскопы очень полезны в современных навигационных системах, потому что наклон или перемещение гироскопа не влияет на показания направления. Большинство гироскопов состоит из рамы, кардана, ротора и оси вращения (см. Рисунок 1 ниже). Ротор представляет собой свободно вращающийся диск, который устанавливается на вращающейся оси в середине более крупного и стабильного колеса. Предпочтительным материалом гироскопов является алюминий из-за его характеристик расширения и прочности. Однако более сложные (и дорогие) гироскопы – титановые.Типичные металлы для машин, такие как сталь, карбид или керамика, слишком тяжелы для большинства применений гироскопов.
История развития гироскопаВ середине-конце 1800-х годов люди во всем мире использовали гироскопы. У каждого был разный дизайн, но все они были очень похожи на изображение ниже. В 1852 году французский физик-экспериментатор Леон Фуко создал первый гироскоп. Он сделал это как часть исследования вращения Земли, состоящего из двух частей.Когда Земля вращалась под гироскопом, гироскоп сохранял свою ориентацию в пространстве. Между 1905 и 1907 годами немецкий изобретатель Герман Аншутц-Кемпфе использовал гироскоп для морской навигации.
Рисунок 1: Гироскоп Материалы в GLE Гироскопические и направленные штифтыСегодня производители гироскопов изготавливают свои собственные подвесы и оси из алюминия из-за его расширения и других прочностных характеристик. Некоторые гироскопы премиум-класса изготавливаются из титана из-за его улучшенных характеристик по сравнению с алюминием.Направляющие штифты гироскопов для прочности часто изготавливаются из карбида или закаленной стали. Точность изготовления этих прецизионных штифтов находится на уровне, которого может достичь только опытный машинист со специализированным оборудованием. В большинстве случаев требуется точная шлифовка и притирка этих штифтов из-за требуемых допусков.
Вращательное движениеГироскоп – это вращающееся тело, обладающее двумя основными свойствами. Эти два фундаментальных свойства включают гироскопическую инерцию и прецессию.Вы обнаружите эти два основных свойства во всех вращающихся телах, включая Землю. Инерция – это свойство ничего не делать или оставаться неизменным. По отношению к гироскопу вращающийся объект будет продолжать вращаться в своей исходной ориентации. Под действием внешнего крутящего момента ось вращения принимает форму конуса. Это явление называется гироскопической прецессией.
Знакомый большинству людей предмет, тесно связанный с гироскопом, – это игрушечный волчок. Если бы игрушечный верх был помещен на плоскую поверхность около поверхности земли под углом к вертикали и не вращался, он, очевидно, упал бы из-за силы тяжести, создающей крутящий момент в центре масс.Если волчок вращается вокруг своей оси, он не упадет, а вместо этого из-за прецессии будет вращаться вокруг своей вертикали, потому что крутящий момент находится в центре масс, обеспечивая изменение углового момента. На рисунке 2 ниже показано чудо гироскопической прецессии. [1]
Рисунок 2: Гироскопическая прецессия Самолетные приборы Гироскопыобычно используются в авиационных приборах в высотомерах, компасах и координаторах поворота. Эти инструменты содержат колесо или ротор, который вращается с высокой частотой вращения (оборотов в минуту), что придает системе свойства жесткости и прецессии.Гироскопы в инструментах обычно имеют вакуумный привод или электрические и используют основные принципы гироскопа для отображения положения самолета. В последнее время лазерные гироскопы заменили механические гироскопы из-за достижений в лазерной технологии.
Когда автопилот управляет самолетом, они постоянно используют гироскоп. Эти устройства оказались очень важными для эксплуатации самолетов – ежегодно в Соединенных Штатах в авиации общего назначения происходит несколько аварий со смертельным исходом из-за потери управления, вызванной отказом гироскопического горизонта или вакуумного насоса, что дезориентирует пилота.Американские военные доверяют жизни своих пилотов и многих других сверхточным центральным направляющим штифтам, созданным GLE Precision.
Рисунок 3: Применение в авиации Ракеты и оборона Сегодня гироскопынаходят широкое применение в оборонной сфере. Например, гироскопы можно найти в современных межконтинентальных баллистических ракетах / ядерных ракетах, танках «Абрам» и военных самолетах. Эти устройства оказались очень эффективными в таких системах, которые могут потребовать изменения направления в полете с точным местоположением и показаниями цели.По мере того, как все больше танков, самолетов, ракет и личного состава будут оснащаться передовыми системами наведения, потребность в гироскопических навигационных системах, которые будут взаимодействовать с системами наведения, будет расти.
Космические путешествияКосмический телескоп Хаббла находит применение для шести гироскопов, три из которых должны всегда работать для максимальной эффективности. Благодаря стабильности, обеспечиваемой гироскопами и его реактивными колесами, Хаббл может поворачиваться, фокусироваться и быть достаточно устойчивым, чтобы с исключительной точностью захватывать изображения целей, находящихся на расстоянии в миллиарды световых лет. [2] Это может быть сложной задачей для телескопа, который вращается вокруг Земли со скоростью 17 000 миль в час. По данным НАСА, «Хаббл имеет точность наведения в 0,007 угловых секунд, что похоже на возможность направить лазерный луч на голову президента Рузвельта на расстоянии около 200 миль». [3]
МорскойОткрытые воды и бурное море не всегда способствуют комфортному путешествию пассажиров на океанских лайнерах или даже на больших яхтах. Появление в 1917 году транспортного корабля USS Henderson времен Первой мировой войны означало рождение гироскопов, используемых в морских приложениях.С тех пор стабилизация корабля достигается с помощью систем маховика в сочетании с гироскопами даже в самых суровых условиях. Стабилизирующие плавники – это еще одна технология для противодействия движению корабля, но они требуют движения вперед. Гироскоп может обеспечивать устойчивость судов, стоящих на якоре или тихоходных судов, хотя они традиционно дороже и намного тяжелее стабилизирующих плавников. [4]
МеханикаВсе гироскопы работают с единственной центральной критической точкой или штифтом.Эти штифты могут быть изготовлены из чего угодно, от нержавеющей стали до карбида. Для большинства гироскопов штифты должны иметь высокую точность и очень хорошую микрошлифровку. Это сделано для того, чтобы работать на уровне, требуемом сегодняшними стандартами технологий и безопасности. Обычно к центральным штифтам предъявляются требования к точности в диапазоне от 0,000006 дюймов до 0,000006 дюймов с допуском микроволокон 1Ra или меньше. Эти характеристики позволяют этим прецизионным штифтам вращаться свободно и точно, что позволяет использовать технологии, которые сегодня используются в оборонной и аэрокосмической промышленности.GLE Precision зарекомендовала себя как важнейший поставщик этой технологии в различных отраслях промышленности США.
Список литературы
[1] https://en.wikipedia.org/wiki/Gyroscope
[2] https://www.spacetelescope.org/about/general/gyroscopes/
[3] https://www.nasa.gov/mission_pages/hubble/story/index.html
[4] https://en.wikipedia.org/wiki/Anti-rolling_gyro
Использование микробита для понимания гироскопа
Привет, дорогие друзья, сегодня мы используем микробит для понимания гироскопов.
Гироскоп – это устройство, основанное на теории сохранения углового момента для определения и поддержания направления. Гироскоп в основном состоит из вращающегося ротора, расположенного на оси. Из-за углового момента ротора, как только гироскоп начинает вращаться, появляется тенденция сопротивляться изменениям направления. Гироскопы в основном используются в системах навигации и позиционирования.
Основным корпусом гироскопа, который мы построили, является механическое колесо с шаровым пальцем снизу и подвижным цилиндром сверху.Вращающееся основание не состоит из множества деталей и требует стабильной конструкции.
Включите питание, двигатель приводит в движение сорокзубую шестерню, чтобы привести в движение восьмизубую шестерню, и скорость увеличивается в пять раз. Здесь мы используем двухступенчатую трансмиссию, поэтому скорость увеличена в 25 раз. Удерживая подвижную втулку, наденьте ее на вал, чтобы она разогналась, и дождитесь увеличения скорости. Когда он быстрый, он может оставаться стабильным, даже если мы отпускаем его, и он остается стабильным, даже если мы берем его и встряхиваем.Вы знаете, как это работает? (Ссылка на видео: https://youtu.be/Grca1X1z35k)
На видео мы можем увидеть две основные характеристики гироскопа: фиксированная ось и прецессия, обе из которых являются воплощением сохранения углового момента.
Принцип гироскопа заключается в том, что направление оси вращения вращающегося объекта не изменится, если на него не действуют внешние силы. Согласно этому принципу, люди используют его, чтобы сохранять направление, а то, что они делают, называют гироскопами.Когда гироскоп работает, ему нужно придать силу, чтобы он быстро раскрутился. Как правило, он может достигать сотен тысяч оборотов в минуту и может работать долгое время. Затем используйте различные методы для считывания направления, указанного осью, и автоматической передачи сигнала данных в систему управления.
В реальной жизни движение подачи гироскопа происходит под действием гравитационного момента.
Гироскоп – древний и очень важный инструмент.Прошло более полувека с тех пор, как появился первый по-настоящему практичный гироскоп, но до сих пор гироскоп все еще привлекает людей для его изучения. Это из-за его собственных особенностей. Наиболее важными основными характеристиками гироскопа являются его устойчивость и прецессия. Люди давно обнаружили, что волчок, вращающийся на высокой скорости, может оставаться вертикально к земле, не падая с волчков, на которых играют дети, что отражает устойчивость волчков. Теория изучения характеристик движения гироскопов – это раздел динамики твердого тела, движущегося вокруг неподвижной точки.Он изучает динамические характеристики вращающихся объектов на основе инерции объектов.
Что ж, сегодняшний обмен знаниями окончен, и заинтересованные друзья могут сами сделать гироскоп, чтобы понять его тайну.
Advanced Gyro – Высококачественный гироскоп – PhysicsHack
Описание
Этот продукт изготавливается на заказ и отправляется в течение 3-5 недель
В гироскопах есть что-то завораживающее, что увлекает почти любого, кто их наблюдает.Противоинтуитивное движение с неожиданной реакцией на поворот производит почти магический эффект.
Я всегда хотел создать высококачественный гироскоп и потратил так много времени на поиск усовершенствований конструкции, которые позволили бы создать что-то уникальное.
После обширных разработок и моей первой заявки на патент я рад, что могу представить Advanced-Gyro!
Этот высокоточный гироскоп не использует струну или двигатель для запуска вращения, просто позволяет контактному шару соприкасаться с рабочей поверхностью, катя его либо по прямой, либо по кругу.Скорость вращения более 3500 об / мин легко достижима, а с практикой ротор может достичь почти 10 000 об / мин. Самое приятное то, что гироскоп можно ускорить в любое время без необходимости останавливать ротор и присоединять двигатель или шнур, что означает, что в игре не должно быть никаких перерывов!
Изготовлен из прочной нержавеющей стали, этот гироскоп невероятно высокого качества и очень тяжелый. Эта масса обеспечивает солидный ротор, специально разработанный для максимального увеличения производительности гироскопа.Форма диска этого инструмента позволяет наблюдать многие эффекты, просто положив гироскоп на бок, для чего обычно требуются подвесы.
В элегантной подставке, также изготовленной из прочной нержавеющей стали, используются три шарикоподшипника для минимизации трения с прецессирующим гироскопом. Это приводит к наблюдению захватывающих и уникальных движений, при которых прецессирующий гироскоп со временем фактически поднимается, пока не станет полностью вертикальным, когда большинство других гироскопов просто медленно опускаются. В вертикальном положении гироскоп может свободно вращаться на уникальном подшипниковом узле.Это поразительная реакция.
Этот гироскоп также представляет собой прекрасно сделанный волчок. Вы можете рассчитывать на длительное время вращения, сидя на месте, или устройство можно слегка наклонить, что приведет к его круговому пути через любой стол или рабочую поверхность.
Нет другого такого гироскопа, и я рад представить вам Advanced Gyro!
Здесь есть еще несколько изображений и клипов:
www.instagram.com / Physicshack
Гироскопы с виниловыми пластинками
Ради интереса я сделал большой набор моторизованных гироскопов, которые продемонстрировать гироскопическую прецессию. Диски изготовлены из винила. записи. Сложно сказать, но на первом фото ниже не только два диска вращаются, но вращается вся Т-образная секция. Там весело видео ниже о них в действии.
Другая причина для этого заключалась в том, чтобы продемонстрировать, что нет потери веса, когда диски поднимаются во время вращения. Это так, даже когда гироскопы не могут подняться закрепив их по горизонтали.Ты можешь видеть гироскопы, сидящие на цифровой шкале на фотографии выше (я также использовал фототахометр для измерения скорости вращения двух вместе). Конечно, при этом у меня не было никакого изменения веса, даже хотя размещение одной игральной карты на деревянном каркасе может вызвать изменение веса.
Как делают гироскопы
Каждый гироскоп состоит из небольшого двигателя постоянного тока с подключенной виниловой пластинкой. к его валу (см. фото ниже).
Каждый виниловый диск прикреплен к валу двигателя с помощью чего-то сделанного. связки латунных трубок внутри друг друга, чтобы перейти от небольшого диаметр вала двигателя до большого диаметра, который может обрабатывать в результате крутящий момент лучше. Затем просверливается отверстие на всем протяжении трубки, вал двигателя и жесткий провод (белая вешалка для одежды провод на фото ниже) продеваем через отверстие, чтобы все было на месте. Затем проволоку сгибают в форме буквы «С», чтобы она не выпала.Часть самой внешней латунной трубки изогнута. наружу на 90 градусов, где он прикручен к виниловому диску. Как вы подключите на виниловый диск будет зависеть от того, что вам доступно – это только один подход из многих.
Чтобы получить гироскопическую прецессию бывает, мне также нужно вращать каждый мотор и гироскоп. Для этого они оба прикреплены к вертикальному валу, как если бы они образовывали верхнюю часть буква «Т». Вертикальный вал вращается с помощью дрели.
Чтобы каждый гироскоп мог наклоняться вверх, когда все вращается, два гироскопа соединены с вертикальным валом с помощью шарниров.
Вертикальный вал для большей части состоит из деревянного дюбеля. это затем крепится самодельной муфтой из латунных трубок к более короткому металлическому валу, за который держится сверло.Деревянный дюбель полностью покрыто другими частями на фото ниже. Это могло все был бы целым, если бы у меня было достаточно длинный металлический стержень или деревянный дюбель меньшего диаметра, который поместится в дрель.
Вертикальный вал удерживается в вертикальном положении двумя подшипниками.Подшипники размещены в самодельных деревянных блоках.
Если бы у меня были батареи, достаточно мощные для питания гироскопа двигатели, которые тоже были маленькими, я бы установил их в та же площадь, что и у каждого гиромотора.Но я этого не сделал, и вместо этого я питал их либо от батареек большего размера, либо от источника постоянного тока на столе (см. фото гироскопов на цифровой шкале выше). Для передачи мощности от столешницы к прядильным двигателям. Я сделал несколько самодельных контактных колец или коммутаторов (фото ниже).
Я проложил провода до медных полос, которые удерживаются в опорной конструкции. что делает их положение регулируемым. Как сказано выше, вертикальный вал в этом месте представляет собой деревянный дюбель, но я отрезал короткие отрезки из медной трубы для изготовления медных колец.На внутренней стороне каждого медного кольца Припаял один провод. Затем я разнес эти медные кольца на вал со всеми проводами внутри и идущий к моторам.
Затем вал устанавливается так, чтобы каждая медная полоска совпадала с одно медное кольцо. Проблема в том, что каждый провод идет к медной полосе. всегда электрически подключен к проводу, который подключен к какого бы медного кольца ни касалась полоса, даже когда вал крутится.Это называется контактным кольцом или коммутатор. И вот как провода идут от вещей на столе подключиться к моторам.
Обратите внимание, что мне действительно нужно было всего четыре контактных кольца для питания двигателей, по два на каждый двигатель (положительный и отрицательный). Я сделал восемь, потому что Я пробовал метод измерения скорости вращения гироскопов это не сработало. Так что нужно всего четыре.
Весь сложный механизм, который вы видите выше для удержания меди полосы на месте просто для облегчения регулировки их положения. Это, вероятно, излишество и, вероятно, можно было бы сделать проще.
Видео – Демонстрация прецессии гироскопа и развлечения на летающей тарелке
В следующем видео я немного прохожу через все это и Продемонстрируйте это в действии.