
13. Системы дифференциальных уравнений
Мы ограничимся здесь рассмотрением систем дифференциальных уравнений первого порядка с двумя и тремя неизвестными функциями. Переход к общему случаю не представляет каких-либо принципиальных затруднений.
Определение 1. Нормальная система двух дифференциальных уравнений называется линейной системой первого порядка, если она имеет вид
(1)
Определение 2. Линейная система дифференциальных уравнений (1) называется однородной, если
В дальнейшем обратимся лишь к частному случаю – однородной линейной системе с постоянными коэффициентами.
Решением системы (1) называется всякий набор из двух функций
, (2)
Обращающих оба уравнения системы (1) в тождество.
Задача Коши для системы (1) состоит в том, чтобы найти такое решение (2), которое при принимало бы заданные значения (начальные условия)
Общее решение системы содержит две произвольные постоянные и , фиксируя которые, находят любое частное решение.
Геометрически решение (2) определяет некоторую линию ( интегральную кривую системы) на плоскости . Если считать, что аргумент играет роль времени, то указанная кривая будет служить траекторией точки, движущейся на плоскости .
Тат как в этом случае определяет вектор скорости, то с механической точки зрения система (1) означает задание поля скоростей в каждый момент времени , а решение задачи Коши равносильно нахождению траектории точки, движущейся под воздействием этого поля и занимавшей в начальный момент времени положение . Плоскость , на которой рассматривается движение называется Фазовой.
Нормальная система трех уравнений первого порядка имеет вид:
(3)
Все основные понятия и определения, сказанные выше для системы двух уравнений, повторяются и для системы (3) с той лишь разницей, что добавляется везде третья функция , а вместо фазовой плоскости надо рассматривать фазовое пространство .
Для решения системы дифференциальных уравнений может быть использован обычный метод исключения неизвестных, сводящий систему (1) к одному дифференциальному уравнению от неизвестной функции второго порядка, а систему (3) – к дифференциальному уравнению третьего порядка.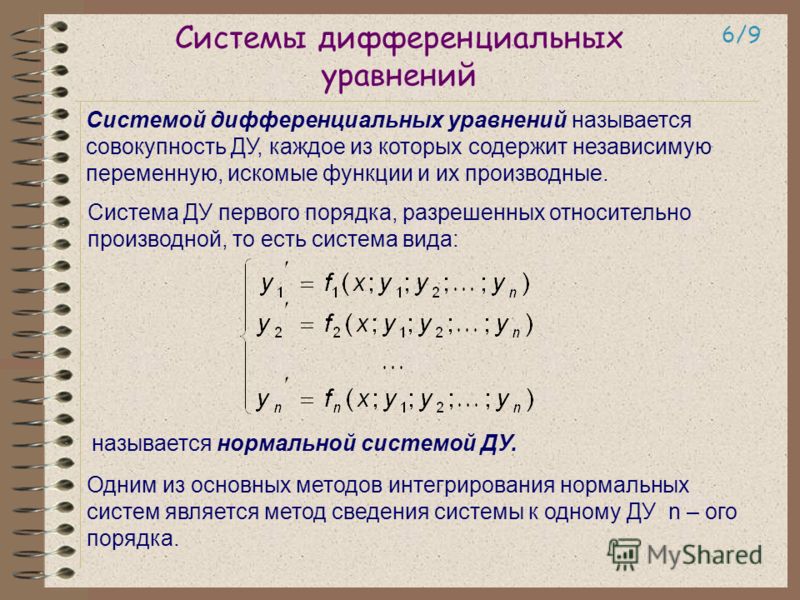 Если метод исключения применяется к линейной системе, то получается также линейное дифференциальное уравнение, к решению которого можно применять выше рассмотренные методы.
Если метод исключения применяется к линейной системе, то получается также линейное дифференциальное уравнение, к решению которого можно применять выше рассмотренные методы.
Пример. Решить задачу Коши для линейной системы
Решение. Запишем систему в виде
И, применяя метод исключения, выразим из первого уравнения через и :
После подстановки во второе уравнение будем иметь ( при ):
Получили неоднородное дифференциальное уравнение с постоянными коэффициентами второго порядка. Используя метод решения такого вида уравнений, рассмотренный выше, получим его общее решение
А так как было выражено через , то вычисляя производную и подставив выражение
Получим общее решение данной системы
.
Теперь обратимся к начальным условиям, используя которые, определим постоянные и .
Так как , то при имеем
И так как , , следовательно,
Получим систему
Таким образом, решением данной задачи Коши являются функции
Пример. Проинтегрировать систему уравнений
Проинтегрировать систему уравнений
Или
Решение. Из первого уравнения данной системы находим и подставим его производную во второе уравнение системы, тогда получим .
Уравнение второго порядка неоднородное с постоянными коэффициентами. Для решения этого уравнения воспользуемся методом решения для этого вида уравнения, рассмотренным выше.
Общее решение уравнения будет функция .
Так как , то, вычислив производную, подставим ее выражение в это равенство
.
Общее решение системы
.
Пример. Найти общее решение системы
,
Где – неизвестные функции.
Решение. Исключим из этих уравнений; для этого из третьего уравнения найдем .
Продифференцируем полученное равенство по : , подставив значения и в первое уравнение, найдем из него , следовательно, .
Подставив значения во второе уравнение системы, будем иметь
или .
Получили линейное однородное дифференциальное уравнение третьего порядка.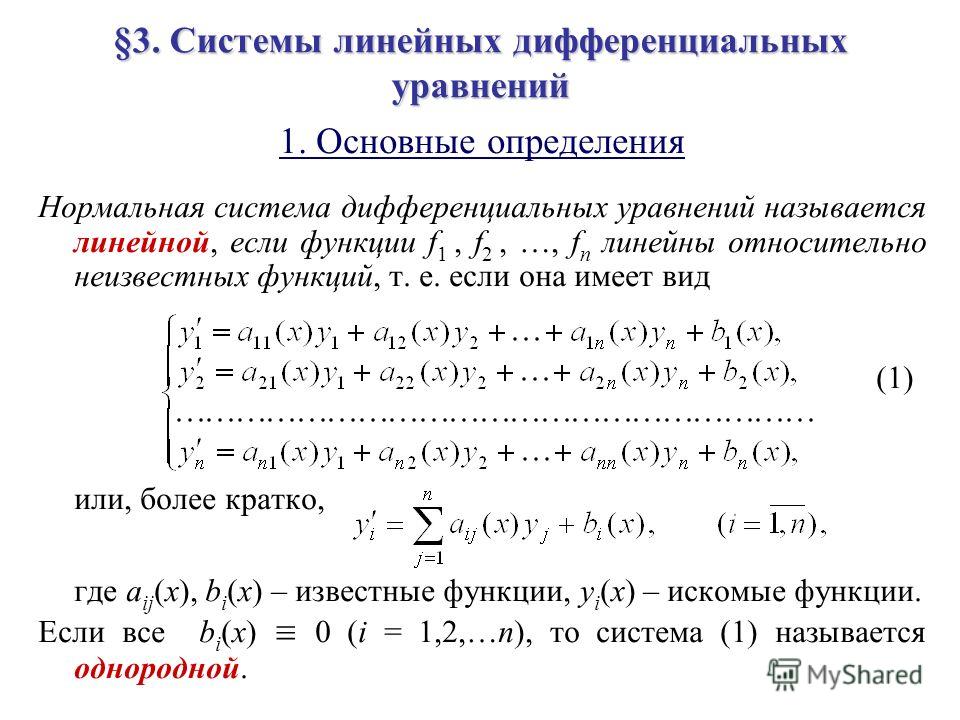
Следовательно, – общее решение уравнения будет
.
Чтобы определить неизвестные функции и , найдем и из последнего равенства:
,
Откуда
.
Общим решением данной системы будет система функций
.
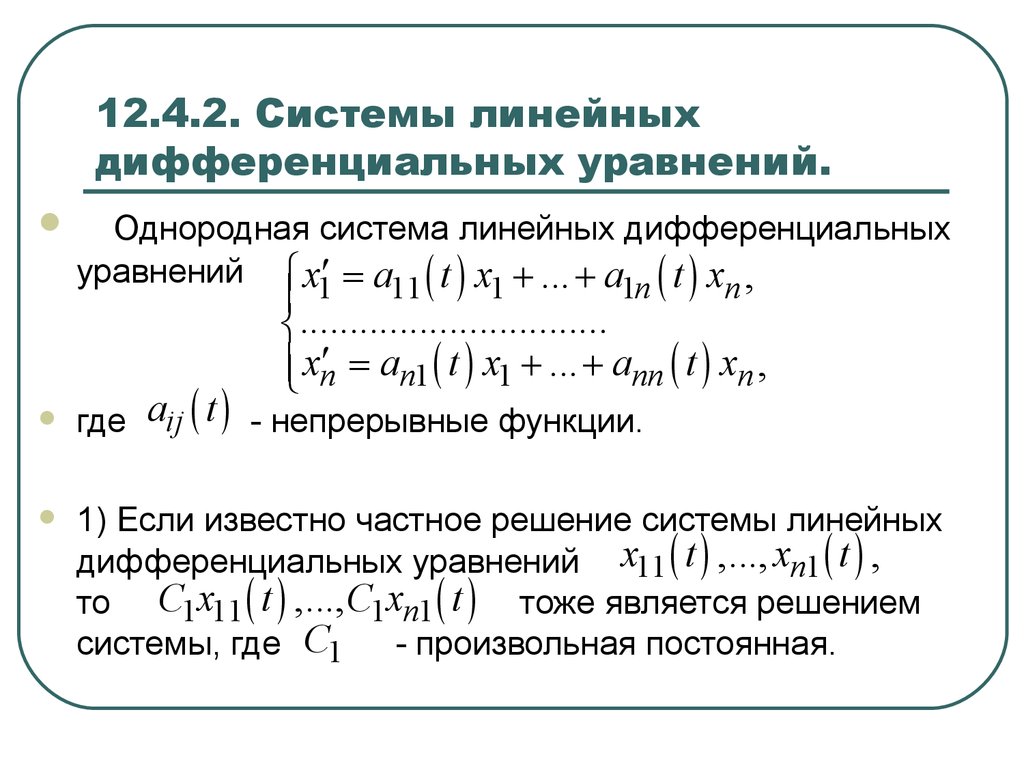
Для интегрирования однородных линейных систем с постоянными коэффициентами применяется также Метод Эйлера.
Пусть дана однородная линейная система дифференциальных уравнений
(4)
Где .
Определение. Линейной комбинацией вектор-функций и на интервале называется вектор-функция .
Теорема. Пусть вектор-функция
Решения на однородной системы (4). Тогда любая их комбинация также есть решение на этой системы.
Рассмотрим на конкретном примере метод Эйлера.
Пример. Решить систему
.
Решение. Искомыми функциями являются функции .
Составим характеристический многочлен для данной системы
.
Находим корни характеристического уравнения
Составим для вспомогательную алгебрагическую систему
:
Получили систему, имеющую бесчисленное множество решений. Выразим через : и пусть , тогда . Тогда вектор-функция – это первое фундаментальное решение.
Составим вспомогательную алгебрагическую систему для
:
Получили систему с бесчисленным множеством решений; выразим через :
и пусть , тогда .
Тогда вектор-функция – второе фундаментальное решение.
Итак, фундаментальная система решений состоит из двух вектор-функций
.
Следовательно, вся совокупность решений системы есть множество
| < Предыдущая |
|---|
Дифференциальные уравнения движения материальной точки
Составление систем дифференциальных уравнений движения материальной точки, на которую действует некоторая система сил для определения движения точки под действием этих сил.
Пусть на материальную точку действует некоторая система сил и требуется определить движение точки под действием этих сил.
Уравнение второго закона динамики для материальной точки массой m запишется в виде
m∙ a = ΣFi (1)
где a — ускорение точки;
Fi — силы, действующие на точку, включая реакции связей.
Спроецировав уравнение (1) на декартовы оси координат, получим систему из трех уравнений
m∙ ax = ΣFxi
m∙ ay = ΣFyi (2)
m∙ az = ΣFzi
где ax , ay , az — проекции ускорения точки на декартовы оси координат;
Fxi , Fyi , Fzi — проекция i<-той силы на соответствующую ось.
Учитывая, что
получаем систему дифференциальных уравнений первого порядка относительно проекций скорости точки
или второго порядка относительно координат точки
Спроецировав уравнение (1) на естественные оси координат, получим следующую систему уравнений
где aτ и an — касательное и нормальное ускорение точки;

Учитывая, что
aτ = dV/dt,
an = V2/ρ,
ab = 0
получим:
mdV/dt = ΣFτi
mV2/ρ = ΣFni (5)
0 = ΣFbi
В зависимости от того, что известно о движении точки, дифференциальные уравнения записывают или в декартовых или в естественных координатах.
- Пример решения задачи по теме
- Интегрирование дифференциальных уравнений движения
Сохранить или поделиться с друзьями
Вы находитесь тут:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Подробнее
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
На нашем сайте можно бесплатно скачать:
– Рамки A4 для учебных работ
– Миллиметровки разного цвета
– Шрифты чертежные ГОСТ
– Листы в клетку и в линейку
Сохранить или поделиться с друзьями
Помощь с решением
ВЫБЕРИТЕ РАЗДЕЛ МЕХАНИКИ
- Техническая механика (техмех)
- Теоретическая механика (теормех)
- Сопротивление материалов (сопромат)
- Строительная механика (строймех)
- Теория механизмов и машин (ТММ)
- Детали машин и ОК (ДМ)
Дифференциальные уравнения – Системы дифференциальных уравнений
Онлайн-заметки Пола
Главная
/
Дифференциальные уравнения
/
Системы ЦЭ
/ Системы дифференциальных уравнений
Показать мобильное уведомление Показать все примечания Скрыть все примечания
Мобильное уведомление
Похоже, вы используете устройство с «узкой» шириной экрана ( т. е. вы, вероятно, используете мобильный телефон). Из-за характера математики на этом сайте лучше всего просматривать в ландшафтном режиме. Если ваше устройство не находится в ландшафтном режиме, многие уравнения будут отображаться сбоку вашего устройства (должна быть возможность прокрутки, чтобы увидеть их), а некоторые пункты меню будут обрезаны из-за узкой ширины экрана.
е. вы, вероятно, используете мобильный телефон). Из-за характера математики на этом сайте лучше всего просматривать в ландшафтном режиме. Если ваше устройство не находится в ландшафтном режиме, многие уравнения будут отображаться сбоку вашего устройства (должна быть возможность прокрутки, чтобы увидеть их), а некоторые пункты меню будут обрезаны из-за узкой ширины экрана.
Раздел 5.4: Системы дифференциальных уравнений
Во введении к этому разделу мы кратко обсудили, как система дифференциальных уравнений может возникнуть из проблемы популяции, в которой мы отслеживаем популяцию как жертвы, так и хищника. Имеет смысл, что количество присутствующей добычи повлияет на количество присутствующего хищника. Точно так же количество присутствующих хищников повлияет на количество присутствующих жертв. Следовательно, дифференциальное уравнение, определяющее популяцию либо жертвы, либо хищника, должно каким-то образом зависеть от популяции другого. Это приведет к двум дифференциальным уравнениям, которые необходимо решить одновременно, чтобы определить популяции жертвы и хищника.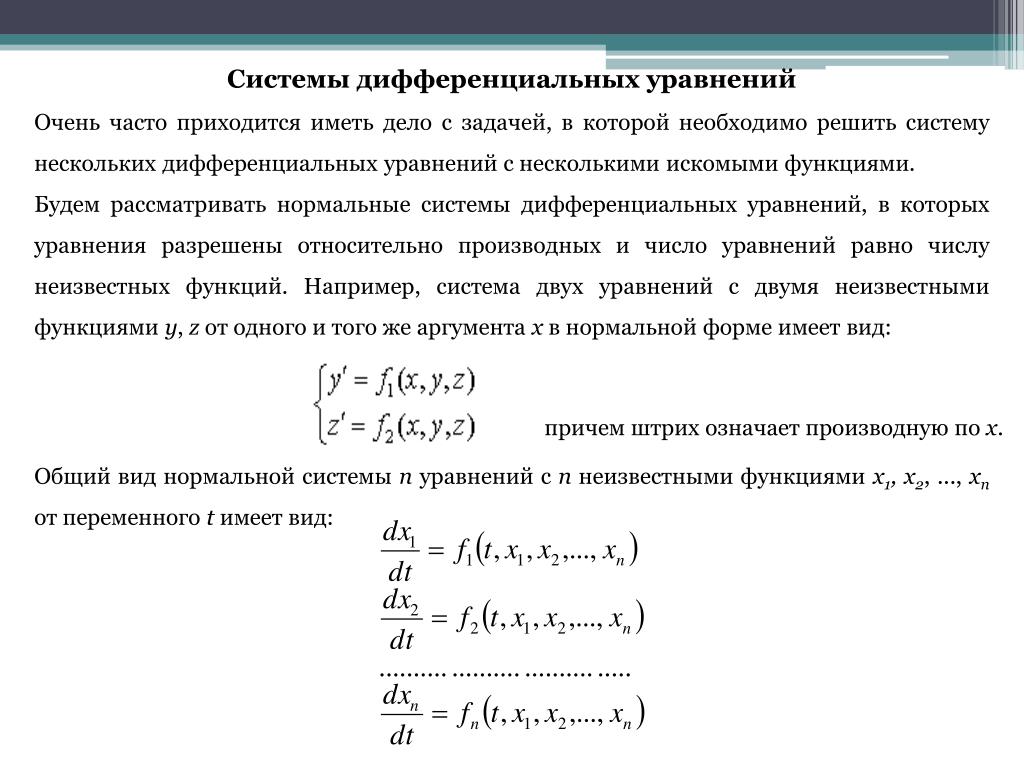 9{\ text {th}} \) также линейные дифференциальные уравнения порядка. Однако, прежде чем мы углубимся в это, давайте запишем систему и избавимся от некоторой терминологии.
9{\ text {th}} \) также линейные дифференциальные уравнения порядка. Однако, прежде чем мы углубимся в это, давайте запишем систему и избавимся от некоторой терминологии.
Мы будем рассматривать линейные системы дифференциальных уравнений первого порядка. Эти термины означают то же самое, что они означали до сих пор. Наибольшая производная в любом месте системы будет первой производной, а все неизвестные функции и их производные будут встречаться только в первой степени и не будут умножаться на другие неизвестные функции. Вот пример системы линейных дифференциальных уравнений первого порядка.
\[\begin{align*}{{x’}_1} & = {x_1} + 2{x_2}\\ {{x’}_2} & = 3{x_1} + 2{x_2}\end{align* }\]
Мы называем такую систему -сопряженной системой , поскольку для нахождения \(x_{1}\) требуется знание \(x_{2}\), а также знание \(x_{1}\) требуется, чтобы найти \(x_{2}\). Мы будем беспокоиться о том, как решить их позже. На данный момент нас интересует только знакомство с некоторыми основами систем. 9{\text{th}}\) линейное дифференциальное уравнение порядка как система. Давайте посмотрим, как это можно сделать.
На данный момент нас интересует только знакомство с некоторыми основами систем. 9{\text{th}}\) линейное дифференциальное уравнение порядка как система. Давайте посмотрим, как это можно сделать.
Пример 1 Напишите следующее дифференциальное уравнение 2 nd порядка в виде системы линейных дифференциальных уравнений первого порядка. \[2y” – 5y’ + y = 0\hspace{0.25in}y\left( 3 \right) = 6\,\,\,\,\,\,\,\,\,y’\left ( 3 \справа) = – 1\]
Показать решение
Мы можем написать дифференциальные уравнения высшего порядка в виде системы с очень простой заменой переменной. Мы начнем с определения следующих двух новых функций.
\[\begin{align*}{x_1}\left( t \right) & = y\left( t \right)\\ {x_2}\left( t \right) & = y’\left( t \right )\конец{выравнивание*}\]
Теперь заметьте, что если мы продифференцируем обе части этих чисел, мы получим
\[\begin{align*}{{x’}_1} & = y’ = {x_2}\\ {{x’}_2} & = y” = – \frac{1}{2}y + \ frac{5}{2}y’ = – \frac{1}{2}{x_1} + \frac{5}{2}{x_2}\end{align*}\]
Обратите внимание на использование дифференциального уравнения во втором уравнении. Мы также можем преобразовать начальные условия в новые функции.
Мы также можем преобразовать начальные условия в новые функции.
\[\begin{align*}{x_1}\left( 3 \right) & = y\left( 3 \right) = 6\\ {x_2}\left( 3 \right) & = y’\left( 3 \справа) = – 1\конец{выравнивание*}\]
Если сложить все вместе, получится следующая система дифференциальных уравнений.
\[\begin{align*}{{x’}_1} & = {x_2} & \hspace{0,25in}{x_1}\left( 3 \right) & = 6\\ {{x’}_2} & = – \frac{1}{2}{x_1} + \frac{5}{2}{x_2} & \hspace{0.25in}{x_2}\left( 3 \right) & = – 1\end{align *}\] 92}\hspace{0.25in}y\left( 0 \right) = 1\,\,\,\,y’\left( 0 \right) = 2\,\,\,\,y”\left ( 0 \справа) = 3\,\,\,\,y”’\слева( 0 \справа) = 4\]
Показать решение
Как и в предыдущем примере, нам нужно определить несколько новых функций. На этот раз нам понадобятся 4 новые функции.
\[\begin{align*}{x_1} & = y & \Rightarrow \hspace{0. 2}\конец{выравнивание*}\]
92} & \hspace{0.25in}{x_4}\left( 0 \right) & = 4\end{align*}\]
2}\конец{выравнивание*}\]
92} & \hspace{0.25in}{x_4}\left( 0 \right) & = 4\end{align*}\]
Теперь, когда мы, наконец, приступим к их решению, мы увидим, что обычно мы не решаем системы в том виде, в каком мы их дали в этом разделе. Системы дифференциальных уравнений можно преобразовать в матричную форму , и именно эту форму мы обычно используем при решении систем.
Пример 3 Преобразуйте следующую систему в матричную форму. \[\begin{align*}{{x’}_1} & = 4{x_1} + 7{x_2}\\ {{x’}_2} & = – 2{x_1} – 5{x_2}\end{ выровнять*}\]
Показать решение
Сначала напишите систему так, чтобы каждая сторона была вектором.
\[\left( {\begin{array}{*{20}{c}}{{{x’}_1}}\\{{{x’}_2}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}{4{x_1} + 7{x_2}}\\{ – 2{x_1} – 5{x_2}}\end{массив}} \ правильно)\]
Теперь правую часть можно записать как умножение матриц,
\[\left( {\begin{array}{*{20}{c}}{{{x’}_1}}\\{{{x’}_2}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}4&7\\{ – 2}&{ – 5}\end{array}} \right)\left( {\begin{array}{* {20}{c}}{{x_1}}\\{{x_2}}\end{массив}} \right)\]
Теперь, если мы определим,
\[\vec x = \left( {\begin{array}{*{20}{c}}{{x_1}}\\{{x_2}}\end{array}} \right)\]
затем
\[\vec x’ = \left( {\begin{array}{*{20}{c}}{{{x’}_1}}\\{{{x’}_2}}\end{массив} } \правильно)\]
Тогда система может быть записана в матричной форме,
\[\vec x’ = \left( {\begin{array}{*{20}{c}}4&7\\{ – 2}&{- 5}\end{array}} \right)\vec x\ ]
Пример 4 Преобразуйте системы из примеров 1 и 2 в матричный вид.
Показать решение
Начнем с системы из примера 1.
\[\begin{align*}{{x’}_1} & = {x_2}\hspace{0,25in}{x_1}\left( 3 \right) = 6\\ {{x’}_2} & = – \frac{1}{2}{x_1} + \frac{5}{2}{x_2}\hspace{0.25in}{x_2}\left( 3 \right) = – 1\end{align*}\]
Первое определение,
\[\vec x = \left( {\begin{array}{*{20}{c}}{{x_1}}\\{{x_2}}\end{array}} \right)\]
Система тогда,
\[\vec x’ = \left( {\begin{array}{*{20}{c}}0&1\\{ – \frac{1}{2}}&{\frac{5}{2}} \end{массив}} \right)\vec x\hspace{0.25in}\vec x\left( 3 \right) = \left( {\begin{array}{*{20}{c}}{{x_1 }\left( 3 \right)}\\{{x_2}\left( 3 \right)}\end{array}} \right) = \left( {\begin{array}{*{20}{c} }6\\{ – 1}\end{массив}} \right)\]
92}\hspace{0.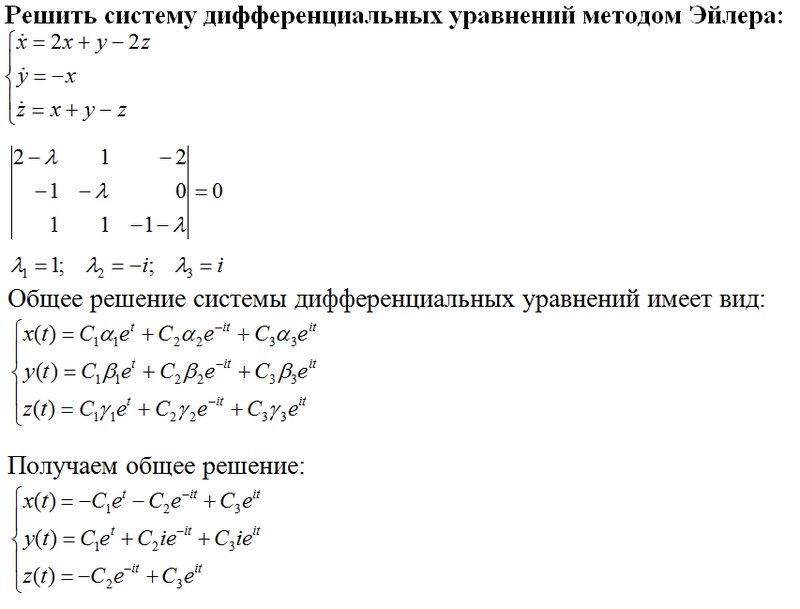 2}}\end{массив}} \right)\]
92}}\end{массив}} \right)\hspace{0.25in}\vec x\left( 0 \right) = \left( {\begin{array}{*{20}{c}}1\\ 2\\3\\4\конец{массив}} \справа)\]
2}}\end{массив}} \right)\]
92}}\end{массив}} \right)\hspace{0.25in}\vec x\left( 0 \right) = \left( {\begin{array}{*{20}{c}}1\\ 2\\3\\4\конец{массив}} \справа)\]
где,
\[\vec x\left( t \right) = \left( {\begin{array}{*{20}{c}}{{x_1}\left( t \right)}\\{{x_2}\ влево( т \вправо)}\\{{x_3}\влево( т \вправо)}\\{{x_4}\влево( т \вправо)}\конец{массив}} \вправо)\]
Обратите внимание, что иногда для таких «больших» систем, как эта, мы делаем еще один шаг вперед и записываем систему как
\[\vec x’ = A\vec x + \vec g\left( t \right)\]
Последнее, что нам нужно сделать в этом разделе, это немного разобраться с терминологией. Начиная с
\[\vec x’ = A\vec x + \vec g\left( t \right)\]
мы говорим, что система является однородной , если \(\vec g\left( t \right) = \vec 0\), и мы говорим, что система неоднородна , если \(\vec g\left( t \ справа) \ne \vec 0\).
линейная алгебра. Выражение дифференциальных уравнений в виде системы уравнений первого порядка
спросил
Изменено 9 лет, 7 месяцев назад
Просмотрено 3к раз
$\begingroup$
Выразите дифференциальное уравнение $$y”’-6y”-y’+6y=0$$
в виде системы уравнений первого порядка, т.е. матричного уравнения вида
$$A(\vec x)’=0$$
где $$\vec x\text{ — вектор }\left[ \ начать {массив} {ррр} х_1 \\\ х_2\\\ х_3 \end{array} \right].$$
- линейная алгебра
- матрицы
- обыкновенные дифференциальные уравнения
$\endgroup$
1
$\begingroup$
Вот как продвинетесь, пусть $y’=z$, тогда будем иметь систему
$$ z”-6z’-z+6y=0 \\ y’ = z $$
Снова ставим $ z’=w $ что приводит к системе
$$ w’-6w-z+6y=0 \\ z’= w \\ y’ = z $$
Составление приведенного выше уравнения дает
$$ y ‘= z\z’=w\w’= 6w + z – 6y.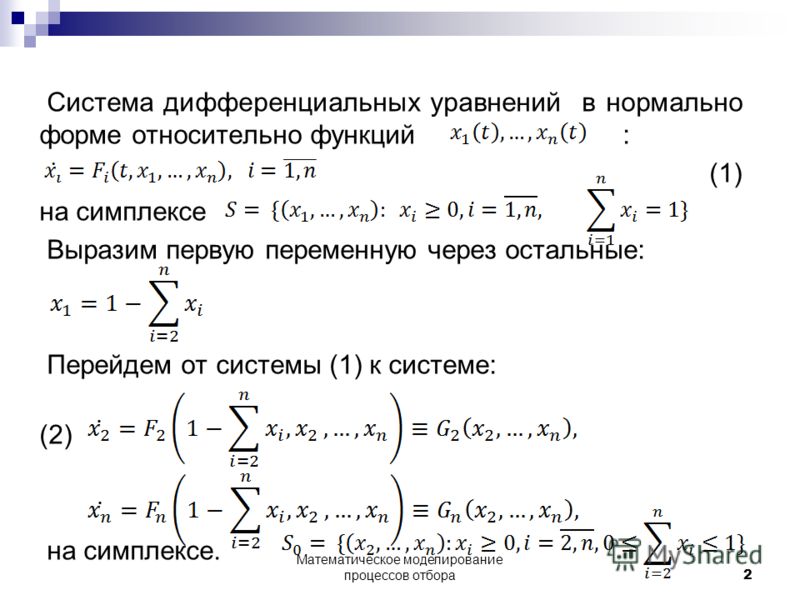 {(n-2)}+…+a_n y=0$$ 9{(n-1)}$$
{(n-2)}+…+a_n y=0$$ 9{(n-1)}$$
теперь запишем уравнения системы в терминах введенных переменных:
первые $n-1$ уравнения очевидны: $$X_1’=X_2$$ $$X_2’=X_3$$ $$.$$ $$.$$ $$.$$ $$X_{n-1}’=X_n$$ для $n$th используйте данный DE: $$ X_n’=-a_1 X_n – a_2 X_{n-1} -…- a_n X_1$$
Таким образом, матрица $\mathbf A$ будет: $$ \begin{pmatrix} 0 & 1 & 0 & .& . & . & 0 \\ 0 & 0 & 1 & 0 & . & . & 0\\. \\.\\0&.&.&.&.&0&1\\-a_n & -a_{n-1} & -a_{n-2} & . & . & . & -a_1\\ \\ \end{pmatrix}$$
В контексте теории управления эта форма представления называется Каноническая форма фазовой переменной . Следует помнить, что это представление не уникально и существуют другие формы, каждая из которых идентифицируется матрицей $\mathbf A$, что может быть более полезным для некоторых специальных целей. (.Чтобы назвать некоторые другие (широко) используемые модели:
- Входная каноническая форма прямой связи :
$$\begin{pmatrix} -a_1 & 1 & 0 & 0 &.