
Сообщество Экспонента
- Публикация
- 26.10.2022
Встраиваемые системы
Эта статья написана совместно с нашими партнерами — компанией «РИТМ». Компания занимается разработкой полунатурных стендов и комплексов полунатурного моделирования «РИТМ», которые используются нашими заказчиками. Клиенты в некотор…
Уже много лет мы занимаемся продвижением модельно-ориентированного проектирования в России. Поэтому наш опыт сконцентрирован вокруг инструментов модельно-ориентированного проектирования — то есть различных сред моделирования и симуляции — и применения их в инженерных разработках.
- MATLAB
- Simulink
- САУ
- ЦОС
- ПЛИС
- МОП
- fpga
- экспонента
- Модельно ориентированное проектирование
26.10.2022
- Публикация
- 26.10.2022
Электропривод и силовая электроника
Основа всех трех сценариев – цифровое моделирование в режиме жесткого реального времени. Наша команда инженеров показала, что КПМ РИТМ способен решать ряд сложных задач, которые стоят перед российской энергетикой.
Мы благодарны всем гостям и всегда рады…
Наша команда инженеров показала, что КПМ РИТМ способен решать ряд сложных задач, которые стоят перед российской энергетикой.
Мы благодарны всем гостям и всегда рады…
13 октября в нашем офисе прошел семинар. Всего за 5 часов мы обсудили, как использовать КПМ РИТМ для:
- Тестирования микропроцессорных реле;
- Построения систем мониторинга переходных режимов;
- Исследования кибер-инцидентов в электроэнергетике.
- экспонента
- микропроцессор
- электроэнергетика
- РИТМ
- энергетика
26.10.2022
- Публикация
- 26.10.2022
Электропривод и силовая электроника
Вас ждут: Заметки по созданию цифровых двойников; Полезные статьи и видео; Анонсы вебинаров и семинаров. Подписывайтесь: https://t.me/exponenta_energy
Наша команда инженеров электроэнергетики создала канал, где вы найдёте множество материалов про то, как используют машины реального времени в энергетике.
- MATLAB
- HIL
- РИТМ
- Hardware In the Loop
- Model In the Loop
26.10.2022
- Публикация
- 25.10.2022
Глубокое и машинное обучение(ИИ), Математика и статистика
В ходе вебинара будет рассказано о существующих подходах к организации предсказательного обслуживания. Также будет продемонстрирована экспериментальная установка, состоящая из электродвигателя, передаточного механизма, нагрузки и системы датчиков. Установка мо…
Приглашаем на вебинар «Предсказание отказов в промышленности: от теории к практике», который пройдет 8 ноября в 10:00.
Предсказание отказов промышленного оборудования достигается за счёт непрерывного мониторинга и контроля состояния оборудования.
Предсказательное обслуживание призвано существенно снизить затраты на техническое обслуживание оборудование, сократить количество поломок и время просто оборудования.
- MATLAB
- Simulink
- САУ
- ЦОС
- ПЛИС
- МОП
- ИИ
- Модельно ориентированное проектирование
25.10.2022
- вопрос
- 24.10.2022
Системы связи, ПЛИС и СнК, Радиолокация, Робототехника и беспилотники, Встраиваемые системы, Цифровая обработка сигналов
Есть модуль в Симулинк детектор приамбулы. Он считает количество бит от начала на котором находится приамбула. Выдает на выходе число. Хочу это значение использовать в модуле Си но симулинк выдает оши…
Есть модуль в Симулинк детектор приамбулы. Он считает количество бит от начала на котором находится приамбула. Выдает на выходе число. Хочу это значение использовать в модуле Си но симулинк выдает оши…
- вопрос
- 19.10.2022
Математика и статистика, Цифровая обработка сигналов, Финансы
u = (y³)/3 + 8xy – 9y – 4x² – 10 Справка
u = (y³)/3 + 8xy – 9y – 4x² – 10 Справка
- вопрос
- 19.
 10.2022
10.2022
Математика и статистика, Цифровая обработка сигналов, Финансы, Другое
u = (y³)/3 + 8xy – 9y – 4x² – 10
u = (y³)/3 + 8xy – 9y – 4x² – 10
5 Ответов
- Публикация
- 18.10.2022
Другое
Введение В настоящее время существует три основных подхода при построении криптографической системы: – алгоритмы с открытыми ключами; – симметричные алгоритмы с закрытыми ключами (блочные шифры)…
Аннотация статьи
Разработан алгоритм генерации ключей шифрования в симметричных криптографических системах с закрытыми ключами, без использования передачи ключей по сетям связи.
An algorithm has been developed for generating encryption keys in symmetric cryptographic systems with private keys, without using key transmission over communication networks.
Ключевые слова: шифрование, симметричные криптографические системы, одноразовые блокноты, алгоритм генерации ключей, интернет вещи, (IoT), приемно-контрольные приборы.
- шифрование
18.10.2022
- Отвеченный вопрос
- 17.10.2022
Изображения и видео, Цифровая обработка сигналов, Верификация и валидация, Математика и статистика, Системы управления, Другое, Автоматизация испытаний
Здравствуйте,Необходимо смоделировать теплопередачу в емкости с водой, через которую проложена труба. Имеется разница температур жидкости в трубе и в емкости. Подскажите инструменты, статиьи, видео и…
Здравствуйте,Необходимо смоделировать теплопередачу в емкости с водой, через которую проложена труба. Имеется разница температур жидкости в трубе и в емкости. Подскажите инструменты, статиьи, видео и…
2 Ответа
- MATLAB
- теплопередача
- теплообмен
17.10.2022
- вопрос
- 15.10.2022
Цифровая обработка сигналов, Автоматизация испытаний, Системы управления, Электропривод и силовая электроника
Всем привет! Мультиметр не выдает окна с графиками после моделирования, может кто сталкивался таким? Желаемые измеряемые величины естественно перенес в правый столбец и ничего(
Симулинк ве. ..
..
Всем привет! Мультиметр не выдает окна с графиками после моделирования, может кто сталкивался таким? Желаемые измеряемые величины естественно перенес в правый столбец и ничего( Симулинк ве…
1 Ответ
- моделирование
15.10.2022
Решение систем уравнений в MathCad 13, 14, 15 на примерах. Универсальные методы Given
Для решения уравнений в Mathcad можно воспользоваться двумя способами. Эти способы были частично рассмотрены в разделе “Решение уравнений”:
- Метод Given – Find
- Метод Solve
Использование метода
Given – Find:В рабочем поле mathcad записываем слово Given. Это служебное слово. Оно подключает определенные программные модули mathcad для обработки исходных данных, необходимых для решения системы уравнений численными методами.
Затем указывается  Если начальное приближение не задать, то mathcad по умолчанию примет его равным нулю для всех переменных, при этом, если окажется, что система имеет несколько решений, то есть риск не определить все корни. Поэтому лучше всегда задавать приближение
Если начальное приближение не задать, то mathcad по умолчанию примет его равным нулю для всех переменных, при этом, если окажется, что система имеет несколько решений, то есть риск не определить все корни. Поэтому лучше всегда задавать приближение
Далее вводятся уравнения. Их можно записать в явном или неявном виде. Само уравнение набирается с клавиатуры вручную с использованием панели Calculator. Из этой панели можно взять основные математические операции: дроби, тригонометрию, факториалы и прочее. Уравнение нужно записывать с использованием логического символа “ровно”. На панели
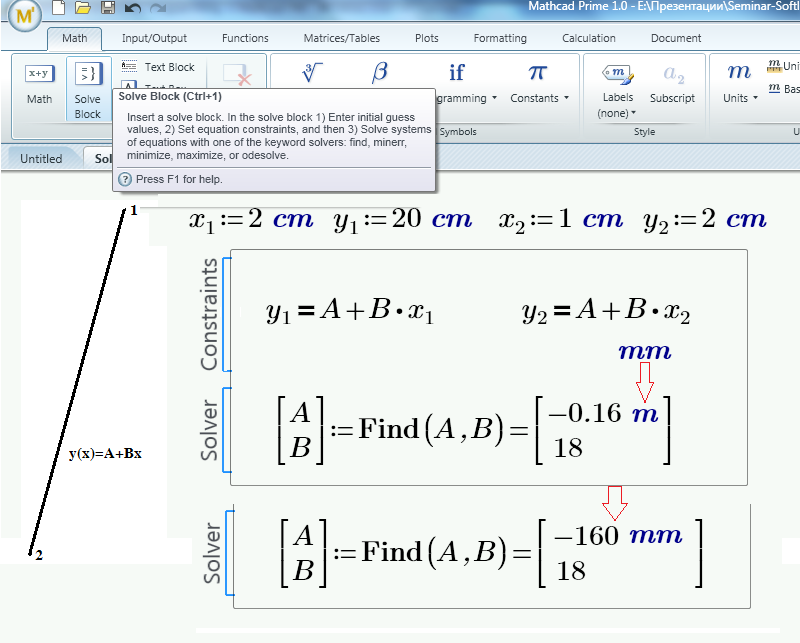
Когда уравнения записаны вводится функция Find(x, y, z,…) (где х, y, z,… – переменные). Это функция, которая возвращает результат решения системы. Значение функции Find() можно присвоить какой-либо переменной с помощью символа “:=” и использовать ее далее в расчетах (см. рис. 3). При решении систем уравнений в mathcad результатом всегда будет являтся матрица значений
Значение функции Find() можно присвоить какой-либо переменной с помощью символа “:=” и использовать ее далее в расчетах (см. рис. 3). При решении систем уравнений в mathcad результатом всегда будет являтся матрица значений
Для того чтобы увидеть результат решения системы уравнений, после Find(x, y, z,…) следует поставить символ “→” либо “=” из панели Evaluation (см. рис. 4).
В зависимости от сложности системы через определенное время MathCad выведет результат. На рис. 5 можно рассмотреть синтаксис и результат решения системы уравнений. Обратите внимание, что можно присваивать результат решения системы матричной переменной и можно работать с отдельными ее элементами
Mathcad позволяет решать системы уравний в символьном виде. Обычно это полезно, когда требуется получить не точное значение переменных, а их выражения через константы. Например, если мы заменим все числовые константы на неизвестные параметры и решим уравнение относительно x, y и z, то результат выведется в символьном виде (см. рис. 6). Причем, обратите внимание, что в данном случае нам не нужно вводить начальное приближение и мы должны использовать символ “→” для вывода результата. Как правило, символьное решение получается громоздким, поэтому не всегда рекомендуется использовать этот метод
Обычно это полезно, когда требуется получить не точное значение переменных, а их выражения через константы. Например, если мы заменим все числовые константы на неизвестные параметры и решим уравнение относительно x, y и z, то результат выведется в символьном виде (см. рис. 6). Причем, обратите внимание, что в данном случае нам не нужно вводить начальное приближение и мы должны использовать символ “→” для вывода результата. Как правило, символьное решение получается громоздким, поэтому не всегда рекомендуется использовать этот метод
Использование метода
Solve:Как показывает практика, методом solve иногда удается решить системы уравнений, которые не поддаются решению с помощью функции Find()
Синтаксис следующий: на панели matrix нажимаем иконку Matrix or Vector и в появившемся окне указываем количество уравнений входящих в систему. В нашем примере их будет три (см. рис. 7)
В нашем примере их будет три (см. рис. 7)
Заполняем систему, вводя последовательно все уравнения используя логический символ “ровно” из панели Boolean. Каждый элемент матрицы-столбца содержит одно уравнение (см. рис. 8)
Когда все уравнения введены, убедитесь, что курсор ввода находится в вашей матрице и затем нажмите кнопку “solve” из панели Symbolic. Появится служебное слово (функция) solve. Далее поставте запятую и введите последовательно все переменные, относительно которых необходимо решить систему уравнений (см. рис. 9)
Уведите курсор в свободное поле mathcad и дождитесь окончания решения системы. Обратите внимание, что мы не вводили начальные приближения. Даный метод их назначает автоматически. Обратите так же внимание, что для решения системы в символьном виде синтаксис аналогичен (см. рис. 10)
рис. 10)
Как показывает моя инженерная практика, решение систем в символьном виде сопряжено с большими вычислительными трудностями. То есть иногда решение системы занимает массу времени, и в итоге mathcad выдает выражение для одной переменной непомерной длины, которое нельзя использовать. Поэтому рекомендуется прменять эту возможность лишь в крайних случаях и по возможности “помогать” mathcad, заменяя константы известными числовыми значениями
Определить основные системные объекты – MATLAB и Simulink
Определить основные системные объекты
В этом примере показано, как создать базовый Системный объект™, который увеличивает число на единицу. Файл определения класса, использованный в примере содержит минимум элементов, необходимых для определения объекта System.
Create System Object Class
Вы можете создать и отредактировать MAT-файл или использовать редактор MATLAB ® Editor для создания вашего системного объекта.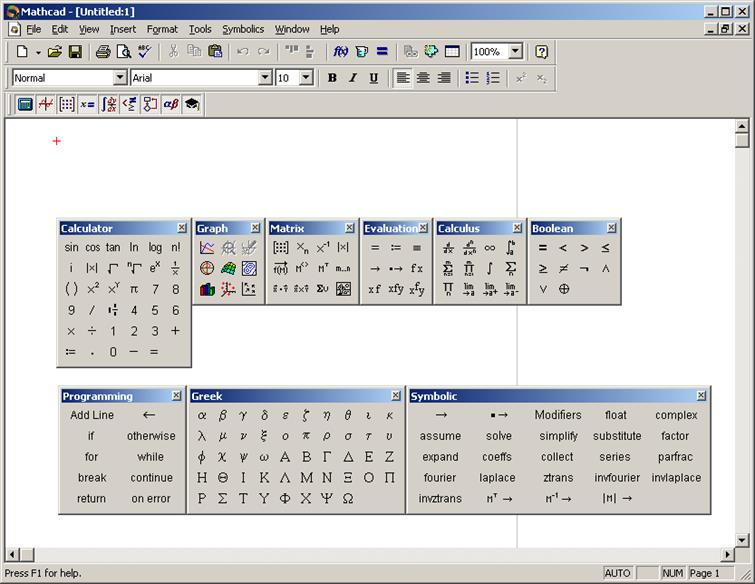 В этом примере показано, как использовать меню в
Редактор MATLAB.
В этом примере показано, как использовать меню в
Редактор MATLAB.
В MATLAB на вкладке Editor выберите > > . Откроется простой шаблон системного объекта.
Подкласс вашего объекта от
matlab.System. ЗаменятьUntitledсAddOneв первой строке вашего файл.classdef AddOne < matlab.System
Системные объекты состоят из базового класса
matlab.Systemи могут включать один или несколько классов миксинов. Вы указываете базовый класс и классы примесей на первая строка вашего файла определения класса.Сохраните файл и назовите его
AddOne.m.
Алгоритм определения
Метод stepImpl содержит алгоритм, который будет выполняться при запуске вашего
объект. Определите этот метод так, чтобы он содержал действия, которые вы хотите, чтобы объект System выполнял.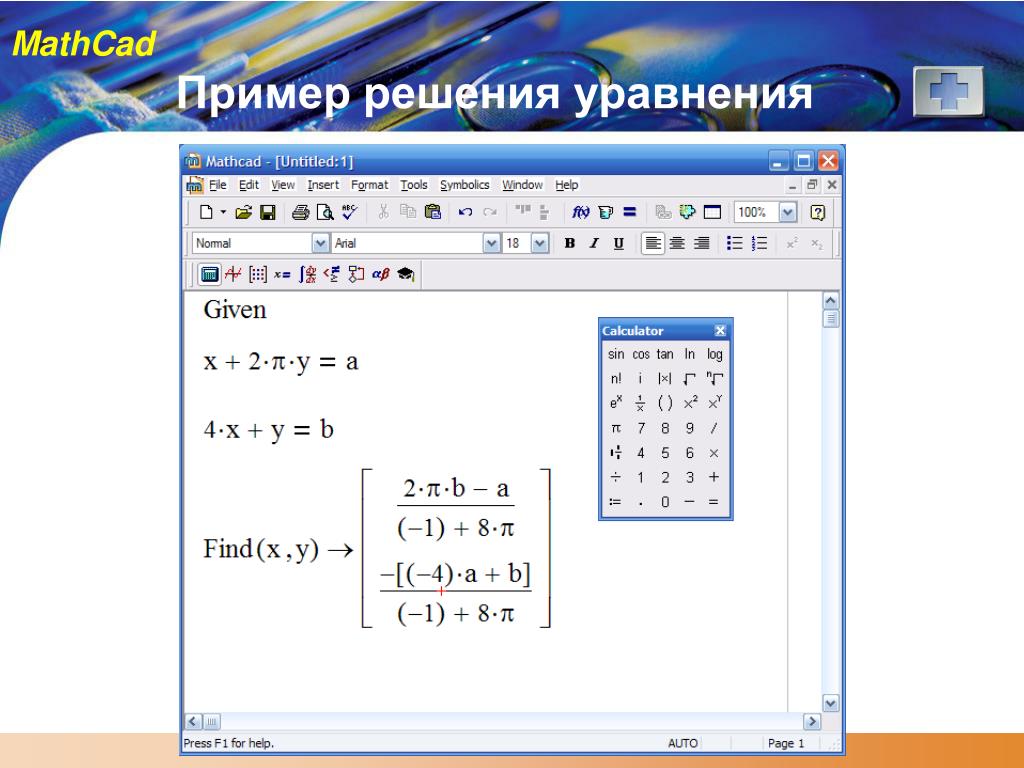
В созданном вами базовом системном объекте проверьте шаблон метода
stepImpl.методов (доступ = защищенный) функция y = stepImpl(obj,u) % Реализовать алгоритм. Вычислите y как функцию входа u и % дискретных состояний. у = у; конец конецДоступ к методу
stepImplвсегда установлен назащищен, потому что это внутренний метод, который пользователи не используют. напрямую звоните или бегите.Для всех методов, кроме статических, в качестве первого входного аргумента требуется дескриптор объекта System. Значение по умолчанию, вставленное Редактор MATLAB, это
obj. Вы можете использовать любое имя для вашего Дескриптор системного объекта.По умолчанию количество входов и выходов равно одному. Входы и выходы могут быть добавлено с помощью . Вы также можете использовать переменную количество входов или выходов, см.
 Изменение количества входов.
Изменение количества входов.В качестве альтернативы, если вы создаете свой Системный объект, редактируя MAT-файл, вы можете добавить метод
stepImplиспользуя > .Измените вычисление в методе
stepImpl, чтобы добавить1на значениеu.методов (доступ = защищенный) функция y = stepImpl(~,u) у = у + 1; конецУдалить неиспользуемые методы, включенные по умолчанию в базовый шаблон.
Вы можете изменить эти методы, чтобы добавить больше действий и свойств системных объектов. Вы также можете не вносить никаких изменений, и Системный объект по-прежнему будет работать так, как задумано.
Файл определения класса теперь содержит весь код, необходимый для этого системного объекта.
classdef AddOne < matlab.System % ADDONE Вычислить выходное значение на единицу больше, чем входное значение % Все методы находятся внутри объявления методов.% Метод stepImpl имеет защищенный доступ методы (доступ = защищенный) функция y = stepImpl(~,u) у = у + 1; конец конец конец
См. также
stepImpl | getNumInputsImpl | getNumOutputsImpl | матлаб.Система
См. также
- Изменение количества входов
- Проектирование и моделирование системы в MATLAB
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB. Веб-браузеры не поддерживают команды MATLAB.
Разработайте систему в Simulink - MATLAB & Simulink
Проектирование системы в Simulink
Шаг 3 из 3 в проектировании на основе моделей с Simulink
Парадигма проектирования на основе моделей сосредоточена на моделях физических компонентов и систем как
основу для проектирования, тестирования и реализации. Этот учебник добавляет разработанную
компонент существующей модели системы.
Этот учебник добавляет разработанную
компонент существующей модели системы.
Модель открытой системы
Модель открытой системы
Модель представляет собой плоского робота, который может двигаться или вращаться с помощью двух колес, подобно домашнему роботу-пылесосу. Откройте модель, введя в командной строке MATLAB®:
open_system('system_model.slx')
В этом учебном пособии анализируется эта система и добавляются к ней функциональные возможности.
Определение спроектированных компонентов и целей проектирования
Спецификация цели проектирования является важным первым шагом к задаче проектирования. Даже с простой системой может быть несколько и даже конкурирующих целей проектирования. Рассмотрим эти цели для примера модели:
Разработайте контроллер, который изменяет входную силу так, чтобы колеса вращались с определенной скоростью. желаемая скорость.
Входные данные проекта, которые заставляют устройство двигаться по заданной траектории.
Разработайте датчик и контроллер так, чтобы устройство следовало по прямой.
Разработайте алгоритм планирования таким образом, чтобы устройство достигало определенной точки с помощью кратчайший путь, избегая препятствий.
Разработайте датчик и алгоритм, чтобы устройство перемещалось по определенной области при этом избегая препятствий.
В этом руководстве разрабатывается система оповещения. Вы определяете параметры датчика, который измеряет расстояние до препятствия. Идеальный датчик измеряет расстояние от препятствие точно. Система оповещения производит выборку этих измерений с фиксированными интервалами, поэтому что выход всегда находится в пределах 0,05 м от измерения. Система генерирует предупреждать вовремя, чтобы робот остановился перед столкновением с препятствием.
Анализ поведения системы с помощью моделирования
Дизайн нового компонента требует анализа линейного движения робота для определить:
Запустить модель с вводом силы, которая начинает движение, ждет, пока робот не достигнет постоянная скорость, а затем устанавливает входную силу на ноль:
В модели дважды щелкните подсистему Inputs.

Удалить существующий пошаговый ввод и добавить генератор импульсов блокировать.
Установить параметры для блока генератора импульсов:
Амплитуда:
1Период:
20Длительность импульса:
15- 0
Эти параметры предназначены для обеспечения максимальной скорости. достиг. Вы можете изменить параметры, чтобы увидеть их эффект.
Запустить модель на 20 сек.
Первый прицел показывает, что скорость быстро начинает снижаться при отключении питания
в 9 часов0019 3 . Тогда скорость асимптотически приближается к нулю, но не
вполне дойти. Это ограничение моделирования; динамика на малых скоростях без
внешняя сила требует более сложного представления. Однако для цели здесь
можно сделать приближение. Увеличьте сигнал положения.
В момент времени 3 положение робота составляет примерно 0,55 м. Когда
симуляция заканчивается, позиция меньше 0,71 м. Можно с уверенностью сказать, что робот
перемещается менее чем на 0,16 м после отключения питания.
Чтобы найти максимальную скорость:
Масштабировать стабильную область выхода скорости во времени, от 1 с до 3 с.
Выйдите из режима масштабирования, снова нажав кнопку масштабирования. Нажмите на курсор Кнопка Измерения .
Установите второй курсор в область, где кривая скорости плоская.
Столбец Value в Cursor Measurements панель показывает, что максимальная скорость робота составляет 0,183 м/с. Чтобы вычислить время, это Чтобы робот прошел 0,05 м, разделите 0,05 м на 0,183 м/с. Вы получаете 0,27 сек.
Компоненты конструкции и проверка конструкции
Конструкция датчика состоит из следующих компонентов:
Измерение расстояния между роботом и препятствием — этот пример предполагает, что измерение является совершенным.
Интервал времени, с которым система оповещения измеряет расстояние — Сохранить ошибка измерения ниже 0,05 м, этот интервал выборки должен быть меньше, чем 0,27 сек. Используйте 0,25 сек.
Расстояние, на котором датчик выдает предупреждение — Анализ показывает, что медленно спуск должен начинаться на расстоянии 0,16 м от препятствия. Фактическое расстояние предупреждения также должно принять во внимание погрешность дискретных измерений 0,05 м. 92 , Сумма и Блоки Sqrt, как показано. Обратите внимание на изменение порядка ввода порты.
Выборка модели. Добавьте блок Zero-Order Hold из Дискретную библиотеку для подсистемы и установите образец . параметр времени на
0,25.Смоделируйте логику предупреждения.
 Добавьте блок сравнения с константой из
библиотеку Logic and Bit Operations и задайте параметры:
Добавьте блок сравнения с константой из
библиотеку Logic and Bit Operations и задайте параметры:Этот логический блок устанавливает свой выход равным
1. когда его вход меньше или равен0,21.Завершите соединение блоков.
Установить местоположение препятствия. Добавьте два блока Constant из Библиотека источников устанавливает постоянные значения
0,65и0. Подключите выходы положения робота к
входы датчика.
Подключите выходы положения робота к
входы датчика.Добавьте область действия в вывод предупреждений.
Запустите модель.
Проверка конструкции
Проверка конструкции с расположением препятствия X = 0,65, Y = 0 использование блоков Constant в качестве входных параметров для подсистемы модели Sensor. Этот test проверяет функциональность конструкции в направлении X. Вы можете создавать подобные тесты для разных путей. Эта модель генерирует только предупреждение. Он не контролирует робот.
Обратите внимание, что статус оповещения становится 1 , как только положение
в пределах 0,21 м от места препятствия и требования к конструкции этого компонента
удовлетворен.
Для реальных систем со сложными компонентами и формальными требованиями
Семейство продуктов Simulink ® включает дополнительные инструменты для улучшения и автоматизации
процесс проектирования. Набор инструментов для требований™ предоставляет инструменты для формального определения требований и связывания их с моделью.
составные части. Симулинк
Control Design™ может упростить проектирование, если вы хотите построить контроллер для этого.
робот. Симулинк
Продукты Verification and Validation™ создают формальную основу для тестирования компонентов и
системы.