Работа в охране и сфере безопасности Каменец-Подольский на OLX.ua
| ||||
| ||||
 Полная занятость
Полная занятость Не нашел то, что искал?
aBi+OMZ/rDETrvY2SlLVLnI4aqzvsBi7HBb2Web4U9/OfDlPUXwX/T9QKi5tA0RI2S0gj4Sa65b2c7E7jqA2aryXLgNBfDdr+ASWTlCPca16q/EJ388Ivpd++4ub9nDkU8ZcGQcUvLyGOEZ+QLmAAkybctBK9U3Js/ITthKdXd911rtVROqH/jOVKCypDf8wk8E9zfTLfh49dOt2YwlqAoX/T41lMIA0aGR+szq9X3nfC2Ujv9xlUQw/mNmlrbEmeHOAyreK3ozVU0CjgOfl8SC5YIwiTwrJKWnjo/3y3tOYqkabfyoz8Hnfxy/hJp3eF0F55trwvFJNXr8YegQZJQ==
- Недавно просмотренные
- Избранные результаты поиска
автоматизация процесса кирпичной кладки – Основные средства
Несмотря на появление все новых и новых строительных материалов старый добрый кирпич, известный тысячи лет, не сходит со сцены — он по-прежнему широко используется. Но укладка кирпича до сих пор не поддавалась автоматизации и как и тысячи лет назад является трудоемкой ручной работой, которая в век электронных технологий выглядит анахронизмом. Поэтому не удивительно, что в ряде стран проводятся исследования по автоматизации процесса кирпичной кладки. Основная сложность состоит в большом разнообразии и неупорядоченности необходимых для этого действий.
Но укладка кирпича до сих пор не поддавалась автоматизации и как и тысячи лет назад является трудоемкой ручной работой, которая в век электронных технологий выглядит анахронизмом. Поэтому не удивительно, что в ряде стран проводятся исследования по автоматизации процесса кирпичной кладки. Основная сложность состоит в большом разнообразии и неупорядоченности необходимых для этого действий.
SAM100
Американская компания Construction Robotics разработала модель полуавтоматического робота-каменщика SAM100 (Semi-Automated Mason – «полуавтоматический каменщик»). Робот состоит из манипулятора-укладчика и системы нанесения цементного раствора. Работа SAM100 выглядит абсолютно фантастически — машина «рукой» берет кирпичи, наносит на них раствор и ловко укладывает на стену. Компании удалось создать машину, достаточно легкую для того, чтобы располагаться на стандартных строительных лесах и передвигаться по ним вдоль стены, либо на рабочей площадке подъемника – эксплуатационная масса робота 1500 кг.
В программном обеспечении системы управления роботом SAM использованы инновационные разработки, в частности программа «картографирования» кирпичной кладки, в которую можно в цифровом виде загрузить схему расположения стены и кирпичей в ней и привязать к координатам GPS/ГЛОНАСС. Программу можно корректировать в зависимости от изменения реальных условий на строительном объекте. Когда корректируется вся конструкция, соответственно, уточняется и положение каждого кирпича в кладке. Таким образом строительный проект точно соответствует всем реальным размерам и ограничениям, существующим на практике.
К тому же, такая предварительная проработка проекта в виде электронной программы позволяет представить его клиенту средствами компьютерной графики. Заказчик сможет наглядно увидеть, как будет выглядеть кирпичная кладка стен, оценить различные варианты расцветки или, например, увидеть, как будет выглядеть логотип компании, выложенный на стене кирпичами. Имеются программные средства, позволяющие загружать в программу управления кладкой в цифровом виде логотипы и другие изображения на стене. Также программа позволяет рассчитать, сколько кирпичей понадобится распилить и сколько времени потребуется для возведения данной стены. Вся эта информация может быть получена предварительно, при укладке же кирпичей по традиционной технологии вручную такие данные как правило получить невозможно.
Имеются программные средства, позволяющие загружать в программу управления кладкой в цифровом виде логотипы и другие изображения на стене. Также программа позволяет рассчитать, сколько кирпичей понадобится распилить и сколько времени потребуется для возведения данной стены. Вся эта информация может быть получена предварительно, при укладке же кирпичей по традиционной технологии вручную такие данные как правило получить невозможно.
Раньше возведение кирпичной стены с оконными и дверными проемами, которые усложняли работу, занимало немалое время. Требовались целые часы для проведения многочисленных замеров и расчетов, чтобы определить, как для этого следует распилить кирпичи. Теперь же в электронную программу управления робота закладывается схема расположения кирпичей в стене и на экране компьютера можно увидеть ее изображение. Программа в течение нескольких минут рассчитывает, как будет выкладываться кирпичная стена. Вместо замеров, которые каменщик производит вручную в процессе работы, все расчеты выполняет электроника, выложенная роботом кирпичная стена выглядит лучше и требуется пилить меньшее количество кирпичей.
Человек-каменщик в процессе работы не наткнется на других рабочих, находящихся на мостках рядом с ним и может скорректировать свое поведение, например, если внезапно поднимется сильный ветер. Создателям пришлось обеспечить роботу возможности решать все эти задачи. Два года ушло только на то, чтобы «научить» робота наносить раствор на кирпич! Датчики системы безопасности не позволят машине упасть с подмостьев и наткнуться на препятствия.
Однако, робот превосходит человека в точности укладки (SAM100 выравнивает кладку по лучу лазера), не устает и сохраняет уровень качества работы как угодно долго. Опытный каменщик может превзойти этого робота в скорости и качестве укладки, но только в течение короткого времени. Затем человек неизбежно устанет, а робот продолжит работу как ни в чем не бывало.
Для обеспечения работы SAM100 требуется три человека: оператор, помощник, подающий в машину кирпичи и раствор, а также каменщик, устанавливающий в стену закладные анкеры, зачищающий лишний раствор и исправляющий мелкие дефекты в кладке. По расчетам компании при применении робота производительность кладки кирпичной стены увеличивается в 3-5 раз, стоимость уменьшается до 50% плюс экономия на оплате труда рабочих. Укладка одного кирпича занимает 12-14 сек в зависимости от его размеров. Такой темп создатели признали оптимальным, т. к. если скорость кладки увеличить, роботу потребуется уже два помощника, подносящих кирпичи и раствор. Строители, познакомившиеся с работой робота-каменщика, дали ему высокие оценки. Заявленная рыночная стоимость SAM100 — US$650000. Компания оценивает период окупаемости робота в 1-2 года.
Construction Robotics продолжает работы по совершенствованию робота-каменщика. Как сказал один из разработчиков машины: «SAM100 создан не для того, чтобы полностью заменить каменщиков-людей. Как и при традиционном способе укладки, требуется каменщик и помощник для подноски кирпича и раствора. Сейчас в строительной отрасли не хватает квалифицированных каменщиков и SAM100 создан, чтобы помочь справиться с этим дефицитом». Следует отметить, что SAM100 – единственная известная коммерческая модель робота-каменщика в мире, все прочие разработки пока находятся на стадии опытных образцов и прототипов.
Как и при традиционном способе укладки, требуется каменщик и помощник для подноски кирпича и раствора. Сейчас в строительной отрасли не хватает квалифицированных каменщиков и SAM100 создан, чтобы помочь справиться с этим дефицитом». Следует отметить, что SAM100 – единственная известная коммерческая модель робота-каменщика в мире, все прочие разработки пока находятся на стадии опытных образцов и прототипов.
Робот-носильщик
А вот исследователи из Университета в г. Баффало (США) сконструировали робота-носильщика OSCR-3, который помогает поднимать и переносить кирпичи и строительные блоки по лестницам и этажам.
Hadrian X
В Австралии компания Fastbrick Robotics разработала робот Hadrian X, который способен уложить 1000 кирпичей за час, скрепляя раствором — это в 20 раз быстрее человека-каменщика. Hadrian X работает под управлением электронной системы, в которую загружен проект постройки в цифровом 3-мерном виде. Главной частью машины является смонтированная на автомобильном шасси телескопическая стрела высотой в 28 м, с помощью которой она и выполняет свою работу. Стрела может корректировать положение до 1000 раз в секунду, компенсируя влияние порывов ветра и прочих природных факторов. Для возведения стен необходимо загрузить лотки с кирпичом на платформу Hadrian.
Стрела может корректировать положение до 1000 раз в секунду, компенсируя влияние порывов ветра и прочих природных факторов. Для возведения стен необходимо загрузить лотки с кирпичом на платформу Hadrian.
Сейчас в Австралии средний возраст каменщиков — 50 лет и робот-каменщик поможет устранить дефицит работников этой профессии. Компания планирует выпустить своего робота на рынок к концу 2017 г. На его разработку было затрачено $7 млн., поэтому низкой его цена не будет, по крайней мере в первое время.
In-Situ Fabricator
Швейцарские исследователи также ведут работы по созданию робота, укладывающего кирпичи, который мог бы адаптироваться к изменениям обстановки на стройке и самостоятельно обучаться в процессе работы, основывая свои действия на бортовой системе «органов чувств» с электронным управлением, не нуждаясь во вмешательстве в управление человека.
In-Situ Fabricator (IF, «Строит здесь и сейчас») создан группой архитекторов и робототехников из Федерального технологического института в Цюрихе (ETH Zurich). Робот имеет сравнительно небольшую массу, мобилен и самое главное, обладает «интеллектом». Он оснащен двумя компьютерами, один из которых отвечает за движения механической «руки»-манипулятора, а другой — за ориентирование. Манипулятор оборудован лазерным дальномером. При перемещении манипулятора дальномер сканирует пространство вокруг робота и строит 3-мерную схему окружающего пространства. Также в бортовую систему управления загружена цифровая модель постройки. Благодаря этим данным робот постоянно определяет свое положение в изменяющейся обстановке и ориентируется при выполнении строительных операций, что создает возможности для его автономной работы, которую он выполняет с точностью до миллиметра. Еще одним преимуществом IF является способность самостоятельно перемещаться по строительной площадке без помощи человека. Робот оснащен датчиками и камерами, которые позволяют ему не натыкаться на препятствия и людей во время движения.
Робот имеет сравнительно небольшую массу, мобилен и самое главное, обладает «интеллектом». Он оснащен двумя компьютерами, один из которых отвечает за движения механической «руки»-манипулятора, а другой — за ориентирование. Манипулятор оборудован лазерным дальномером. При перемещении манипулятора дальномер сканирует пространство вокруг робота и строит 3-мерную схему окружающего пространства. Также в бортовую систему управления загружена цифровая модель постройки. Благодаря этим данным робот постоянно определяет свое положение в изменяющейся обстановке и ориентируется при выполнении строительных операций, что создает возможности для его автономной работы, которую он выполняет с точностью до миллиметра. Еще одним преимуществом IF является способность самостоятельно перемещаться по строительной площадке без помощи человека. Робот оснащен датчиками и камерами, которые позволяют ему не натыкаться на препятствия и людей во время движения.
Главным его достоинством, как считают разработчики, является способность адаптироваться и решать задачи при внезапных нестандартных изменениях обстановки на строительном объекте. Они считают, что это одна из первых машин, которая способна возводить нестандартные постройки, то есть проект которых может изменяться и адаптироваться к окружающим условиям непосредственно в процессе строительства. Исследователи продолжают работу по совершенствованию IF, т.к. по словам разработчиков действия робота пока «примитивны», он как бы «работает вслепую». Робот пока еще неуверенно и медленно ориентируется в обстановке после совершения каждого действия, чтобы полноценно выполнять работу с необходимой точностью, в будущем он должен ориентироваться с большой скоростью и прямо в процессе движения.
Они считают, что это одна из первых машин, которая способна возводить нестандартные постройки, то есть проект которых может изменяться и адаптироваться к окружающим условиям непосредственно в процессе строительства. Исследователи продолжают работу по совершенствованию IF, т.к. по словам разработчиков действия робота пока «примитивны», он как бы «работает вслепую». Робот пока еще неуверенно и медленно ориентируется в обстановке после совершения каждого действия, чтобы полноценно выполнять работу с необходимой точностью, в будущем он должен ориентироваться с большой скоростью и прямо в процессе движения.
Роботы-муравьи
Интересную работу с оригинальным подходом к решению проблемы автоматизации процесса строительства из кирпичей ведет группа ученых в Гарвардской школе техники и прикладных наук (SEAS). Вы никогда не задумывались как муравьям удается выстроить свой дом? Ведь у них нет ни центрального руководства, ни общего плана постройки, они даже не распределяют обязанности между собой и не общаются друг с другом, в процессе строительства не знают, в каком состоянии находится в данный момент строящийся объект. Насекомые действуют по принципу, который называется «стигмергия» (stigmergy, «стигмержи» или «муравьиный алгоритм»): особь наблюдает, какие изменения внесли в окружающую среду другие особи и действует, исходя из этого. Муравей просто несет кусок глины или песчинку к месту, куда его нужно уложить, и если это место оказывается уже занятым — несет к следующему. Тысячи маленьких тружеников рождаются и умирают, воды и ветры наносят ущерб постройке, но строительство успешно продолжается, и муравейник растет, не разрушаясь.
Исследователи из Гарварда построили программу TERMES («термиты») на принципах «муравьиного алгоритма», которая позволяет большой группе роботов действовать как колонии муравьев, и получили впечатляющие результаты: на демонстрации группа роботов слаженно возводила сложные трехмерные сооружения. Роботы строили ступени, взбираясь по ним, чтобы продолжать строительство, знали, куда нужно положить очередной кирпич и как его закрепить, следуя простому правилу, согласно которому каждый укладывает кирпич на первое же доступное место, чтобы сооружение росло, при этом не создавая препятствий для соседей и хода строительства, и даже восстанавливали постройку после внезапных изменений в обстановке и ее состоянии (часть постройки нарочно разрушали). Каждый робот участвовал в строительстве параллельно с другими, но не знал при этом, кто из «коллег» и что делает в этот момент. Если робот выходил из строя или должен был покинуть стройку по каким-либо причинам, это не оказывало никакого влияния на других. После постановки первоначальной задачи коллектив роботов больше не требует вмешательства человека в процесс строительства. Одну и ту же программу могут выполнять и пять, и пятьсот роботов.
Каждый робот участвовал в строительстве параллельно с другими, но не знал при этом, кто из «коллег» и что делает в этот момент. Если робот выходил из строя или должен был покинуть стройку по каким-либо причинам, это не оказывало никакого влияния на других. После постановки первоначальной задачи коллектив роботов больше не требует вмешательства человека в процесс строительства. Одну и ту же программу могут выполнять и пять, и пятьсот роботов.
Исследователи стремились создать систему максимально простую, дешевую и надежную. Бортовые электронные системы управления роботов получились достаточно простыми. У этих бюджетных «роботов-коллективистов» – т. н. «килоботов» имеется всего четыре типа простых датчиков и три привода-актюатора.
Технические возможности системы TERMES пока еще ограничены, но, как утверждают авторы, уже сейчас роботизированная система может выполнять задачи по укладке заграждений из мешков с песком при наводнениях или выполнять несложные строительные работы на Марсе.
Летающие роботы-строители
В отличие от системы TERMES работа других современных роботизированных систем управляется центральным блоком управления-контроллером либо все роботы должны иметь способность общаться друг с другом, согласовывая свои действия.
«Институт динамических систем и управления» (Institute for Dynamic Systems and Control) в Цюрихе (Швейцария) разработал концепцию «Летающих роботов» (Flying Machine Arena), которые можно использовать для возведения построек из кирпичей или блоков в автономном режиме — без вмешательства человека в процесс строительства. Система может управлять разными летательными аппаратами, но были выбраны квадрокоптеры за их маневренность, простоту механического устройства, надежность и прочность, а также способность неподвижно парить в воздухе. Квадрокоптеры оснащены бортовой электронной системой управления, гиродатчиком угловой скорости и акселерометром. Кирпичи удерживаются специальным захватом из трех штифтов с сервоприводом.
От того, насколько точно и надежно будут уложены кирпичи, зависит успех строительства. Исследования показали, что самый точный и надежный способ укладки кирпичей — доставка их по воздуху и укладка без использования силы тяготения. Квадрокоптер подносит кирпич к строению и рассчитывает траекторию, по которой кирпич будет уложен в кладку при заданной скорости. Исследования показали, что чем меньше скорость, с которой кирпич подлетает к кладке (и соответственно слабее удар при укладке), тем больше оказывает влияние на точность траектории турбуленции в воздухе и воздействие силы тяготения. Поэтому предпочтительно укладывать кирпичи с достаточно высокой скоростью, без лишней «осторожности».
Исследования показали, что самый точный и надежный способ укладки кирпичей — доставка их по воздуху и укладка без использования силы тяготения. Квадрокоптер подносит кирпич к строению и рассчитывает траекторию, по которой кирпич будет уложен в кладку при заданной скорости. Исследования показали, что чем меньше скорость, с которой кирпич подлетает к кладке (и соответственно слабее удар при укладке), тем больше оказывает влияние на точность траектории турбуленции в воздухе и воздействие силы тяготения. Поэтому предпочтительно укладывать кирпичи с достаточно высокой скоростью, без лишней «осторожности».
Способность группы летательных аппаратов-роботов строить сооружения была продемонстрирована на практике: построена модель в масштабе 1:100 инновационной жилой башни высотой в 600 м со 180-ю этажами и общей площадью в 1,3 млн м2 для проживания 30 000 человек – реальный архитектурный проект «автономного дома будущего» Строительная конструкция высотой 6 м состояла из 1500 блоков-кирпичей. Четыре квадрокоптера возводили ее в течение 4-х дней.
Четыре квадрокоптера возводили ее в течение 4-х дней.
Программа управления контролировала траектории полетов, исключая столкновения машин: перед тем, как квадрокоптер совершит маневр, система резервирует свободное пространство для этого, чтобы на его пути не оказалась другая машина, и система не допускает в зарезервированное пространство другие машины до окончания маневра. Система предотвращает столкновения квардрокоптеров с возводимым строением — т. е. всё пространство, которое занимает башня, считается «зарезервированным» и квадрокоптеры не могут проложить через него маршруты своих полетов.
Система по беспроводной связи управляла операциями захвата и укладки кирпичей и всей динамикой полетов — скоростями и маневрами, позволяла определять количество участвующих в строительстве летающих роботов в каждый конкретный момент и темп укладки кирпичей (кирпичей/час), обновляла информацию о пространственном расположении объектов со скоростью более 200 раз в сек. Это не выглядит слишком много, если учесть, что объекты в этом пространстве могут летать со скоростями быстрее 10 м/сек, т. е. между двумя «картинками» они уже могут переместиться на расстояние свыше 5 см. Система координировала, в какое время машины осуществляли подзарядку аккумуляторов.
е. между двумя «картинками» они уже могут переместиться на расстояние свыше 5 см. Система координировала, в какое время машины осуществляли подзарядку аккумуляторов.
Следует отметить, что подобные системы позволяют повысить производительность работы группы роботов и быстро преодолевать возникающие в процессе работы проблемы, но с увеличением количества роботов и территории их деятельности управлять централизованными системами становится все сложнее, а центральный контроллер представляет собой то единственное слабое звено, выход из строя которого нарушит работу сразу всей системы.
FlexBrick
Компания ROB Technologies AG, специализирующаяся на создании программного обеспечения и имеющая отделения в нескольких странах, разрабатывает FlexBrick — пакет компьютерных программ для управления роботизированной укладкой кирпичей в нестандартном порядке — для украшения фасадов зданий, интерьеров и т. п. Роботизированная укладка FlexBrick уже применялась при строительстве ряда зданий и сооружений в Швейцарии, Германии и Великобритании. ROB также разрабатывает промышленную систему по изготовлению деталей кирпичных фасадов для использования роботом, который будет укладывать кирпичи.
ROB также разрабатывает промышленную систему по изготовлению деталей кирпичных фасадов для использования роботом, который будет укладывать кирпичи.
Совершенствование системы продолжается.
Роботы-плиточники
Близкими «родственниками» роботов-каменщиков можно считать роботов, выкладывающих плиточные полы. Недавно прототип такого полуавтоматического робота продемонстрировала Future Cities Laboratory (FCL, «Лаборатория городов будущего») в Сингапуре, работавшая совместно с компанией ROB Technologies AG.
Разработчики считают, что промышленные образцы робота-плиточника можно будет выпускать на рынок, когда удастся увеличить производительность машины вчетверо по сравнению с нынешним уровнем.
Работа в Новосибирске, поиск персонала и публикация вакансий
Работа в Новосибирске — мечта многих, поэтому так важно не упустить свой шанс и найти вакансию, которая подходит именно вам. На hh.ru вы обнаружите большое количество вакансий в различных отраслях деятельности: от сотрудников сферы обслуживания до топ-менеджеров крупных компаний. Используйте нашу обширную информационную базу — и подходящая работа в Новосибирске найдется быстро, ведь HeadHunter сотрудничает со множеством предприятий-работодателей.
Используйте нашу обширную информационную базу — и подходящая работа в Новосибирске найдется быстро, ведь HeadHunter сотрудничает со множеством предприятий-работодателей.
Список требований работодателей к соискателю, как правило, стандартный. От новых сотрудников ждут высокого уровня коммуникабельности, целеустремленности, положительного опыта работы в предыдущих компаниях, стремления к достижению результатов.
Показать полностью
Несмотря на то что наличие трудового стажа — важная характеристика для большинства работодателей, успешное трудоустройство в Новосибирске не всегда предполагает наличие большого послужного списка. Для людей, только начинающих свой трудовой путь, на hh.ru есть довольно много предложений. Различные компании заинтересованы в привлечении персонала, только окончившего обучение. Многие руководители считают, что из вчерашних студентов легче вырастить хорошие кадры. Да, для их обучения придется потратить время, зато молодой человек, стремящийся начать свою карьеру, имеет повышенную мотивацию. И временные затраты можно компенсировать за счет заработной платы.
И временные затраты можно компенсировать за счет заработной платы.
Искать работу в Новосибирске с помощью HeadHunter легко. Заполните форму резюме и разместите его. Теперь можно откликаться на вакансии интересных компаний и получать приглашения от работодателей. Нет времени следить за появлением новых предложений для вас на сайте? Используйте сервис рассылки и уведомлений. Система будет сама присылать информацию о подходящих вакансиях и работе в Новосибирске на электронную почту.
На что стоит обратить внимание при поиске новой работы? Работодатели предпочитают не просто соискателей с высокими профессиональными качествами, но и сотрудников, обладающих сильной адаптивностью. Такие работники легче переносят перемены в жизни, более адекватно ориентируются в любой ситуации, эмоционально устойчивы и способны меняться вместе с обстоятельствами.
Усть-Каменогорск – Объявления – Вакансии от работодателей
Вакансии от работодателей ДОБАВИТЬ ОБЪЯВЛЕНИЕ
Вакансии от работодателей ДОБАВИТЬ ОБЪЯВЛЕНИЕ
Подработка для девушек/женщин.
Хочу предложить для тех кому нужна подработка на 2-4 часа, два/ три раза в неделю. Добавлю в Ватсапп группу по услугам клининга: услуги по уборке подъездов/ мытью окон/ уборке квартир. Туда будут скидываться заявки и стоимость работы. Кому интересно пишите ваш номер телефона на ватсап Договорная
87772862828
20 ЯНВАРЯ 2022 00:46:51
Требуется Крановщик на 25 тонник , ЗП 350 000 на руки . Все вопросы: 8-776-44-94-888 400000
87764494888
19 ЯНВАРЯ 2022 23:02:47
Требуется ЭЛЕКТРОМОНТЕРЫ на завод по адресу Абая 122, бывший винный завод Адиль !8-776-44-94-888
87764494888
19 ЯНВАРЯ 2022 23:01:22
Требуються кассиры – операторы на АЗС “ECO PETROL”. График посменый, обучение, соц. пакет. Резюме отправлять на 8 702 130 30 02.
8776 648 69 99
19 ЯНВАРЯ 2022 22:54:45
В новый Банный & SPA комплекс ARASAN требуются кассир, администратор и уборщицы.
 Оплата и график работы по договоренности.
Оплата и график работы по договоренности.+77051117471,
19 ЯНВАРЯ 2022 22:29:07
Требуется бармен-официант по проспекту Шакарима. Соц. пакет.+питание. Заработная плата сдельная. По всем вопросам 8-705-276-31-02. 3000 и выше
87052763102
19 ЯНВАРЯ 2022 22:17:42
Требуются сотрудники в цех рекламной компании. Для работы в цеху и на монтажах. Приветствуюется опыт, а так же наличие рабочей специальности сварщика и др.рабочих навыков. Обращаться по телефону указанному в объявлении. После собеседования
87472600347
19 ЯНВАРЯ 2022 20:59:09
Требуется продавец в продуктовый магазин,график работы 3/3,оплата всегда вовремя. Опыт работы не обязателен,мы всему обучим, главное желание.
87774669955
19 ЯНВАРЯ 2022 20:15:12
Требуется продавец в продуктовый магазин, график работы 3/3 , зарплата всегда вовремя,дружный коллектив. Можно без опыта ,мы всему научим обучим главное желание.

87774669955
19 ЯНВАРЯ 2022 20:14:45
ТОО требуется менеджер по продажам(реализация спецодежды) Опыт и знание 1С приветствуется. График работы 5/2 с 9.00 до 18.00. Оплачивается связь. При наличии авто, выдается бензин. Резюме отправлять в Whats App на номер 87055068222 от 150000
87055068222
19 ЯНВАРЯ 2022 20:13:51
Срочно требуется помощница по уходу за больной женщиной. Заработная плата – от 100 000 тг в месяц. Тел. 412584, сот. 8-777-749-78-02, 8-705-497-79-81.
Тел. 412584, сот. 8-777-749-78-02
19 ЯНВАРЯ 2022 19:20:57
- Крупной торговой дистрибьюторской компании для работы на склад требуется Кладовщик. Функциональные обязанности: Руководство командой комплектовщиков. Разгрузка, погрузка товара, участвует в работе по хранению, сохранности, обработке и комплектации товара на складе, осуществляет комплектацию и подготовку к отпуску продукции со склада, выполнение работ по складу. Официальное трудоустройство согласно ТК РК, пятидневная рабочая неделя, своевременная оплата труда.
 График работы с 07:30 до 16:30 либо с 13:00 до 22:00 часов. Справки по телефону/WhatsApp 87052056797. Обращаться по адресу пр. Абая 189, офис 301 ТОО “Шыгыс Алтай Сауда”, резюме отправлять на электронный адрес: [email protected]
от 160 000 на руки
График работы с 07:30 до 16:30 либо с 13:00 до 22:00 часов. Справки по телефону/WhatsApp 87052056797. Обращаться по адресу пр. Абая 189, офис 301 ТОО “Шыгыс Алтай Сауда”, резюме отправлять на электронный адрес: [email protected]
от 160 000 на руки87052056797
19 ЯНВАРЯ 2022 19:19:18
На склад продуктов питания требуются грузчики комплектовщики (МУЖЧИНЫ), необходимы ответственные сотрудники желающие заработать. График 5/2 , 08:00-18:00 (Оплата еженедельная) 100.000-120.000
87085887287
19 ЯНВАРЯ 2022 19:08:41
Срочно Требуется электрик на обслуживание зданий гостиницы полный соц пакет график работы 6/1 с 8 до 17:00 С 8 до 17:00 З/П 130000 130000
87055069207
19 ЯНВАРЯ 2022 18:53:50
В продуктовые магазины города (р-н Бурова, Прогресс) требуется ответственные, общительные продавцы. Работа 2х2 или 3х3. Оплата достойная и своевременная. Комфортные условия работы. Хорошие клиенты. Дополнительная информация по номеру +7 (777) 858 5427 собеседование
+7 (777) 858 5427
19 ЯНВАРЯ 2022 18:32:27
В продуктовый магазин (район автовокзала) требуется продавец.
 Требования – опыт работы, рекомендации, отсутствие вредных привычек обязательно! По всем вопросам обращайтесь по телефону +7.777.852.7635
Требования – опыт работы, рекомендации, отсутствие вредных привычек обязательно! По всем вопросам обращайтесь по телефону +7.777.852.763587778527635
19 ЯНВАРЯ 2022 18:31:45
- Крупной торговой дистрибьюторской компании требуется Завскладом. Функциональные обязанности: Руководство работой склада по приему, хранению и отпуску ТМЦ. Обеспечивает сохранность ТМЦ, соблюдение режимов хранения, организует погрузочно-разгрузочные работы. Официальное трудоустройство согласно ТК РК, пятидневная рабочая неделя, своевременная оплата труда. График работы с 08 до 17 часов. Справки по телефону/WhatsApp 87052056797. Обращаться по адресу пр. Абая 189, офис №301 ТОО “Шыгыс Алтай Сауда”, резюме отправлять на электронный адрес: [email protected]
от 190 000 тенге на руки
87052056797
19 ЯНВАРЯ 2022 18:21:15
Требуется охрана в ТЦ Глобус график работы 6/1 100000
87764222200
19 ЯНВАРЯ 2022 17:56:21
Требуется менеджер по продажам на Китайскую.
 спец.технику. Работа с клиентами. Сбор и обработка заказов! Работа с поставщиками! Уверенный пользователь ПК. Знание программ 1С 8 приветствуется. Умение работать в команде. Быстрая обучаемость, коммуникабельность, адаптивность. Испытательный срок 3 месяца. Заработная плата при собеседовании. Все вопросы по Ватсап 87072301946
180000-200000
спец.технику. Работа с клиентами. Сбор и обработка заказов! Работа с поставщиками! Уверенный пользователь ПК. Знание программ 1С 8 приветствуется. Умение работать в команде. Быстрая обучаемость, коммуникабельность, адаптивность. Испытательный срок 3 месяца. Заработная плата при собеседовании. Все вопросы по Ватсап 87072301946
180000-20000087072301946
19 ЯНВАРЯ 2022 17:42:41
В рекламное предприятие требуются сотрудники в цех по производству рекламы, имеющие рабочие специальности (токарь, сварщик, слесарь, электрик и т.д.). Обучение специфике работы производится нс испытательном сроке.
87714145679, 87477598184, 75-19-57
19 ЯНВАРЯ 2022 17:34:02
Почему у нас до сих пор нет роботов-каменщиков? / Хабр
Как только начинаешь исследовать вопрос строительства, оказывается, что любые новые идеи, которые могут прийти в голову, кто-то уже не раз и не два испытывал – часто несколько десятилетий назад. Одной из таких новых, но на самом деле старых, идей является механический каменщик – машина для автоматизации кирпичной кладки стен.
Привлекательность этой идеи легко видеть: кладка кирпичей, кажется, идеально подходит для механизации. Это многократно повторяющаяся операция – для постройки кирпичного здания нужно уложить десятки или даже сотни тысяч кирпичей или блоков, большинство из которых совершенно одинаковы, причём кладутся они тоже одинаково. Кажется, что такая машина не должна будет совершать физических сложных движений – на каждый кирпич наносится слой строительного раствора, после чего он кладётся рядом с предыдущим. Все кирпичи одного размера, поэтому каждый следующий кирпич кладётся на одном и том же расстоянии от предыдущего.
Кроме того, работа каменщика, особенно при работе с блоками, одна из самых физически тяжёлых – она требует многочасового и многократного перемещения тяжёлых объектов. В целом кладка кирпичей кажется идеальным кандидатом на механизацию – и люди пытаются сделать это уже более 100 лет.
Ранние попытки
Укладочная машина Джона Томпсона от 1904 года
Первые попытки создать машину для укладки кирпичей датируются началом прошлого века – можно найти патенты на подобные изобретения, зарегистрированные в 1899, 1904 и 1924 годах, и у каждого из них свой автор. Некоторые из авторов работали над идеей годами. Джон Томпсон, автор патента от 1904 года, затем получал патенты в 1918 и 1926 годах. Теоретически эти машины должны были работать на верхней части стены, класть слой раствора, и выкладывать на него по кирпичу за раз. Они не могли никак воспринимать своё окружение, или измерять, куда именно класть кирпич – они просто выдавливали слой смеси и механически размещали кирпичи на одинаковых расстояниях друг от друга. Неизвестно, сколько подобных машин было изготовлено, но однако одну из них (от изобретателя Джона Найта) использовали для постройки кирпичной стены, которая, как говорят, стоит до сих пор.
Некоторые из авторов работали над идеей годами. Джон Томпсон, автор патента от 1904 года, затем получал патенты в 1918 и 1926 годах. Теоретически эти машины должны были работать на верхней части стены, класть слой раствора, и выкладывать на него по кирпичу за раз. Они не могли никак воспринимать своё окружение, или измерять, куда именно класть кирпич – они просто выдавливали слой смеси и механически размещали кирпичи на одинаковых расстояниях друг от друга. Неизвестно, сколько подобных машин было изготовлено, но однако одну из них (от изобретателя Джона Найта) использовали для постройки кирпичной стены, которая, как говорят, стоит до сих пор.
Подобная концепция будет ещё не раз возникать на протяжении следующих десятилетий. Патенты на сходные машины можно найти в 60-х и 70-х годах. На видео 1967 года показан «моторизованный каменщик» – и он не так уж сильно отличается от конструкции 1900-х годов:
Попытки создать механического каменщика не ушли далеко от демонстрационных образцов и не имели коммерческого успеха.
1980-е: роботы-каменщики
В конце 1980-х и начале 90-х появляются попытки механизации труда каменщика на основе роботизированных манипуляторов. В отличие от чисто механических изобретений новые машины умели обрабатывать информацию. Вместо бездумного повторения одних и тех же движений их манипуляторы комбинировали роботизированную руку с большой степенью свободы с датчиками и управляющими системами. Они «видели» кирпич, куда его нужно класть, а потом брали его и помещали туда.
Принципиальная схема работы системы ROCCO
Какое-то время эту область активно разрабатывали в академических кругах – примеры можно найти у Slocum 1988, Lehiten 1989, Rihani 1996, Altobelli 1993, Pritschow 1996, у японской SMAS и ROCCO. Но несмотря на все подобные попытки успеха эти системы добились примерно такого же, что и их механические предшественники. Большинство не пошло дальше технических описаний («вот, как можно было бы создать робота-каменщика»), некоторые стали прототипами, но по сути никакого прогресса не случилось. Один из исследователей сдался, заявив, что роботы-строители общего назначения в обозримом будущем не будут иметь практического смысла. Я смог найти лишь один пример такой рабочей системы, использовавшейся в строительстве – это немецкая Multistone 8000, способная с помощью человека автоматически собирать стеновые панели на фабрике.
Один из исследователей сдался, заявив, что роботы-строители общего назначения в обозримом будущем не будут иметь практического смысла. Я смог найти лишь один пример такой рабочей системы, использовавшейся в строительстве – это немецкая Multistone 8000, способная с помощью человека автоматически собирать стеновые панели на фабрике.
Современные попытки
С годами важность кирпичной кладки как строительной технологии в развитых странах снизилась, в связи с чем пропал и интерес к её автоматизации. И в отличие от такой области, как 3D-печать, где существуют десятки попыток реализации, я смог найти совсем немного современных попыток автоматизации работы каменщика.
Hadrian X
Самой развитой из этих систем кажется Hadrian от компании Fastbrick Robotics. В ней используется грузовик, оборудованный полой стрелой, сквозь которую проходят специальные блоки (что-то вроде грузовика с системой подачи цемента). Когда блок доходит до конца стрелы, его поливают промышленным клеем (вместо обычной строительной смеси), затем его берёт манипулятор и ставит в нужное положение.
Длина стрелы и то, что она закреплена на грузовике, устраняет многие ограничения на укладку блоков, присутствовавшие у других механических систем. Она может класть блоки в узких коридорах и на сложных углах, а также возвести все стены небольшого здания, передвинув при этом грузовик всего несколько раз. Сейчас Hadrian способна класть по 200 блоков в час, а целью компании является скорость в 1000 блоков в час. Хотя их блоки отличаются от тех, что используют каменщики в США, однако для сравнения укажем, что американский каменщик может уложить порядка 400 кирпичей в день.
Hadrian разрабатывают с 2006 года, и лишь недавно начали использовать на коммерческих стройках – пока что компания построила блочные стены 3-4 зданий в Австралии. Судя по всему, компания переживает не лучшие времена (что не удивительно для системы, находившейся в разработке более 15 лет), и в 2020 году у них, похоже, прошла серьёзная череда увольнений. Однако в последние несколько месяцев она мало-помалу набирает проекты.
Но наиболее успешная из известных мне механических систем для укладки кирпича – это SAM, «полуавтоматический каменщик» [semi autonomous mason]. Это робот от компании Construction Robotics, который используется в коммерческом строительстве с 2015 годов. В отличие от кладущего блоки Hadrian, SAM кладёт обычные глиняные кирпичи. Она состоит из роботизированного манипулятора, системы подачи раствора и конвейрной ленты, закреплённых на снабжённом колёсами шасси. Манипулятор берёт кирпич, наносит на него раствор, и ставит на нужное место стены согласно внутренней «кирпичной карте», на которую нанесены все позиции для кирпичей. После этого процесс повторяется, и машина постепенно возводит стену (люди требуются только для укладки кирпичей на углах). У SAM есть несколько датчиков, компенсирующих движение платформы и гарантирующее горизонтальную кладку кирпичей, и она может работать с кирпичами разного размера (но не со шлакоблоками). Её ставят на мобильные леса, и поднимают по мере постройки стены.
SAM
Судя по всему у SAM, как и у Hadrian, тоже есть проблемы. На длинных участках стены он работает хорошо, но на коротких практически не опережает людей-каменщиков. Он не может заезжать за углы и класть стыки. В лучшем случае он кладёт кирпичи в 5 раз быстрее человека, однако за ним всё равно должны идти каменщики, очищающие стыки и иногда выравнивающие кирпичи, а также техник, решающий проблемы машины. В книге, описывающей разработку SAM, перечислены различные проблемы, с которыми пришлось столкнуться инженерам, а в конце упоминается, что на этого робота сложно найти покупателей. Судя по сайту, компания Construction Robotics уже сменила свои приоритеты, и вместо SAM сосредоточилась на другом продукте – подъёмнике MULE.
Кроме SAM и Hadrian есть и ещё несколько механических каменщиков на разных стадиях разработки. Индийская компания Craftsmac недавно объявила о выпуске робота-каменщика, используемого для возведения стен из шлакоблока. Она похожа на SAM, это шасси на колёсах с манипулятором, конвейером и бетономешалкой.
Одна британская система автоматической укладки кирпичей использует установленную на колёсах систему двухосевого движения, позволяющую заворачивать за углы и решающую проблему переноса робота с этажа на этаж (вместо этого требуется потратить время на первоначальную сборку системы).
Компания ROB использует коммерчески доступный манипулятор для укладки разнообразных панелей (хотя со смесью, судя по всему, не работает). Иногда встречаются различные научные работы на эту тему. В целом список проектов довольно короткий.
Одна из областей, где был достигнут определённый коммерческий успех – это кирпичные дороги. Различные компании предлагают машины для «печати» участков дорог из кирпича. Укладку дорог немного проще автоматизировать, чем строительство стен.
Roadprinter
Ассистенты каменщиков
Есть и немного другая категория машин, предназначенных для увеличения продуктивности работы каменщика – я называю их «ассистенты каменщиков». Эти машины помогают физически поднимать блоки (чаще встречаются машины, работающие именно с блоками, а не с кирпичами), уменьшая физическую нагрузку на каменщика, который занят тем, что размещает блоки на нужных местах.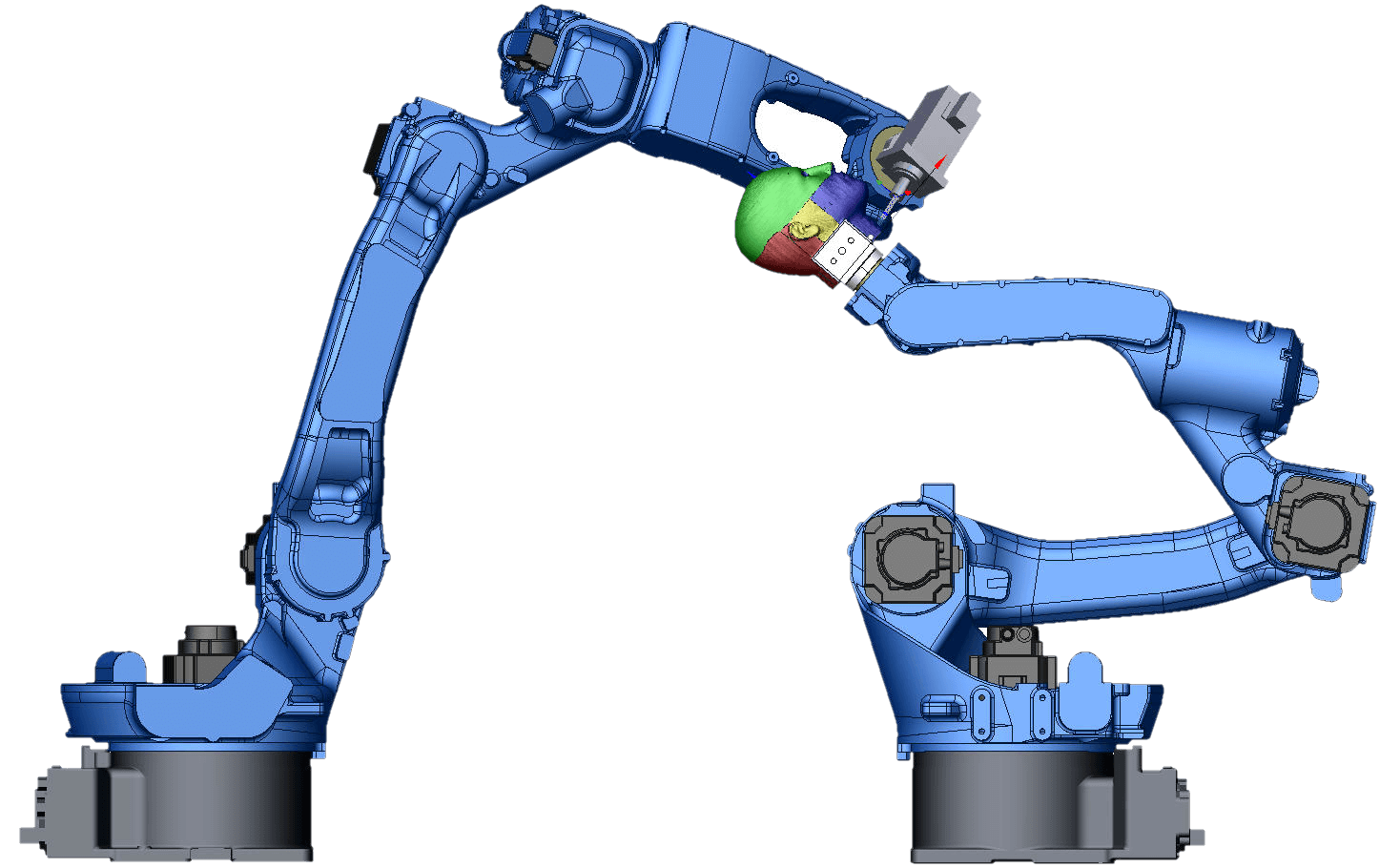
Такие ассистенты существуют, по меньшей мере, с 1994 года, с военных экспериментов с MAMA – «мехатронным ассистентом каменщика» [Mechatronically Assisted Mason’s Aid]. Это была машина с захватом, расположенным на стреле, стоящей на грузовике. Каменщик использовал захват для перемещения блока на нужное место без необходимости поднимать его руками. С тех пор варианты идеи со стрелой и захватом разрабатывали несколько компаний: мне удалось найти информацию о Layher Balance, Rimatem и Assistance System Steinherr. На сегодня мне известна только одна система, которую можно купить – это MULE от Construction Robotics (судя по всему, она пользуется гораздо большим успехом, чем их SAM).
Layher Balancer
Однако наиболее интересным ассистентом каменщика я считаю экзоскелет, разработанный компанией FRACO, и выпущенный в прошлом году. Это адаптация военной технологии, содержащая различные пассивные и активные механизмы, помогающие поднимать тяжести и уменьшающие нагрузки на мускулы каменщика.
Экзоскелет FRACO
Конечно, машину, помогающую поднимать тяжести, сложно назвать революционной технологией. Вероятно, самой важной технологией с точки зрения увеличения продуктивности работы каменщика, стал телескопический погрузчик, устранивший необходимость ручного перемещения поддонов с кирпичами на место кладки.
Так почему у нас до сих пор нет механических каменщиков?
Работа каменщика кажется идеальным кандидатом на механизацию, однако сто лет скромного прогресса намекают на наличие в этой области какого-то аспекта, препятствующего созданию такой машины. Получается интересная тема для исследования, помогающая определить, в каких именно случаях механизация работы становится слишком трудной. Чем кладка кирпичей, почти полностью ручная работа, отличается от, например, забивания гвоздей – процесса, который уже почти полностью механизирован?
Судя по всему, тут работают несколько факторов. Во-первых, кирпич не кладётся на что-то ровное и твёрдое – он располагается на тонком слое строительной смеси из воды, песка и цемента. У смеси довольно сложные физические свойства – это неньютоновская жидкость, вязкость которой увеличивается при движении. Из-за этого механический, детерминистский способ кладки не проходит (вероятно, поэтому каменщикам сложно объяснять тонкости своего дела – при укладке кирпича они проделывают множество небольших движений, а смесь ведёт себя и не как жидкость, и не как твёрдое тело). А поскольку смесь изготавливают на месте, в её свойствах периодически появляются некоторые различия.
У смеси довольно сложные физические свойства – это неньютоновская жидкость, вязкость которой увеличивается при движении. Из-за этого механический, детерминистский способ кладки не проходит (вероятно, поэтому каменщикам сложно объяснять тонкости своего дела – при укладке кирпича они проделывают множество небольших движений, а смесь ведёт себя и не как жидкость, и не как твёрдое тело). А поскольку смесь изготавливают на месте, в её свойствах периодически появляются некоторые различия.
Автоукладчики кирпича постоянно сталкивались с трудностями, связанными со строительной смесью – многие просто игнорировали эту проблему. Научные исследования конца 80-х и начала 90-х часто занимались вопросами создания стен без строительной смеси, например, блоков с зацеплением друг за друга, или же альтернатив смесям, ведущих себя более предсказуемо (на чём остановился Hadrian). В работе 1996 года Притшоу просто написал, что решить проблему смеси оказалось слишком сложно. У изобретателей, которым удалось решить задачу надёжного нанесения смеси, пока не получается выдавать надёжное соединение кирпичей – они просто нашлёпывают смесь на кирпич, после чего рабочим приходится убирать излишки. В каком-то смысле такие роботы, как SAM, недалеко ушли от моторизованного каменщика 50-х годов.
В каком-то смысле такие роботы, как SAM, недалеко ушли от моторизованного каменщика 50-х годов.
Соединение кирпичей смесью усложняет работу каменщика. Если пневматический молоток просто прилагает силу к гвоздю, получая примерно один и тот же результат раз за разом (а если получается немного криво, то это не страшно – гвоздь всё равно выполняет свою функцию), то укладка кирпича на полученную на месте неньютоновскую смесь ошибок не прощает. Не получая обратной связи (не измеряя, насколько ровно лёг кирпич), сложно быть уверенным, что стена получится ровной. Каменщики постоянно проверяют горизонтальность кирпичей нитками или уровнями, и при необходимости принимают меры. Механическому каменщику нужен способ делать то же самое. SAM почти решил эту проблему, но всё равно иногда требует вмешательства рабочих, которые ударами ставят кирпичи на место.
Это одно из главных отличий забивания гвоздей от кладки кирпича – необходимость внесения поправок в зависимости от окружения. Пневматические молотки, циркулярные пилы и другие электроинструменты больше похожи на ассистентов каменщика – они выполняют чисто физическую работу, оставляя обработку информации и расположение деталей на совести людей. Пневматический молоток не должен понимать, куда нужно забить гвоздь, и не должен сам перемещаться в нужное место – он просто выполняет физическую работу по забиванию гвоздя.
Пневматический молоток не должен понимать, куда нужно забить гвоздь, и не должен сам перемещаться в нужное место – он просто выполняет физическую работу по забиванию гвоздя.
Можно провести параллели с эволюцией фрезерных и сверлильных машин. Первые подобные механизмы придумали в конце XIX – начале XX веков, а возможность программного управления добавили в 40-50-х годах прошлого века. Однако только недавно у нас появилась возможность встроить в них обработку обратной связи в реальном времени, чтобы получить такие продукты, как Shaper Origin (ручной фрезер, поправляющий движения человека). Надёжная реализация реакций машины в ответ на окружение – задача, решать которую сложно и сегодня, даже если физических ограничений на это нет.
Shaper Origin от ShaperTools
Осложняют механизацию работы каменщика и ещё несколько дополнительных проблем:
- Кирпичи и блоки большие и тяжёлые, поэтому для работы с ними требуются крупные и дорогие машины (особенно, если вы хотите работать с ними быстро – ведь усилия возрастают с ускорением).

- В США стены возводятся с использованием арматуры, что сложно реализовать в простой машине, кладущей блоки. На проектах, где использовали Hadrian, арматуру ставили вручную.
- Сложно договориться с подрядчиками на использование подобных машин, поскольку те стараются избегать рисков. В удивительно откровенном видео от Construction Robotics подробно рассказывают о том, насколько сложно было убедить клиента использовать систему компании. В книге, описывающей развитие компании, встречается очень много примеров сложных продаж.
Будет ли расти популярность механических каменщиков?
Сложно сказать. В принципе, все зависит от прогресса в робототехнике, программах, компьютерном зрении и других технологиях (назовём всё это «автоматизацией»).
При всех сложностях, укладка кирпичей остаётся одной из наиболее успешно автоматизированных областей строительства. Это одна из немногих областей, в которой реально можно купить промышленного робота. Поэтому разумно предположить, что прогресс автоматизации окажется полезнее всего для процесса укладки кирпичей, поскольку он и так продвинулся дальше остальных.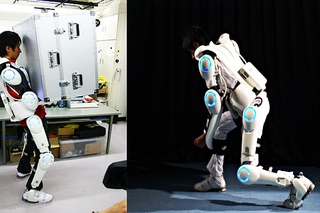 Если автоматизированные каменщики будут становиться меньше, быстрее, научатся работать с углами и доводить до ума соединения кирпичей, они станут весьма привлекательными.
Если автоматизированные каменщики будут становиться меньше, быстрее, научатся работать с углами и доводить до ума соединения кирпичей, они станут весьма привлекательными.
Однако вполне может оказаться, что развитие автоматизации положительно скажется на всех строительных технологиях.
Блоки весят много, и машины, работающие с ними, вероятно, всегда будут дороже машин, работающих с менее тяжёлыми строительными системами. При этом даже большие блоки остаются небольшой частью строительного процесса в целом. Поэтому возможно, что автоматические каменщики всегда будут отставать по скорости и стоимости от других типов машин. Возможно, будет промежуток времени, в который автоматические каменщики окажутся очень популярными, после чего их вытеснят другие строительные системы.
Как выбрать кобота ? Чем промышленные роботы манипуляторы отличаются от коботов? Разбираемся вместе с 3Dtool.
Содержание:
- Чем отличается кобот от промышленного робота?
- Что такое «кобот»? Разбираемся в терминах
- Так есть ли разница?
- Основные характеристики
- Как оценить безопасность кобота?
- Этапы внедрения робота в производственный процесс
Всем привет, друзья! С Вами компания 3DTool!
Кто бы что ни говорил, но в любом деле есть два главных ресурса: люди и время. Нехватка того или другого – это прямые предпосылки к роботизации производства. Тем более, что роботы давно уже перестали быть чем-то из области научной фантастики: теперь это неотъемлемая часть реальности. Но почему же до сих пор не все решаются на покупку «механического сотрудника» нового поколения? Дело в том, что для максимальной эффективности необходимо сделать так, чтобы люди занимались своей работой, а не обслуживанием машины. Недостаточные знания в робототехнике приводят к тому, что руководитель думает: «У нас нет времени!». Это – главная ошибка. На деле роботизация как раз и направлена на то, чтобы максимально эффективно использовать время. Нужно лишь правильно выбрать робота. А именно – кобота. Нужен ли кобот вашему предприятию? Если да – то как его выбрать? На эти и другие вопросы мы ответим в данной статье.
Нехватка того или другого – это прямые предпосылки к роботизации производства. Тем более, что роботы давно уже перестали быть чем-то из области научной фантастики: теперь это неотъемлемая часть реальности. Но почему же до сих пор не все решаются на покупку «механического сотрудника» нового поколения? Дело в том, что для максимальной эффективности необходимо сделать так, чтобы люди занимались своей работой, а не обслуживанием машины. Недостаточные знания в робототехнике приводят к тому, что руководитель думает: «У нас нет времени!». Это – главная ошибка. На деле роботизация как раз и направлена на то, чтобы максимально эффективно использовать время. Нужно лишь правильно выбрать робота. А именно – кобота. Нужен ли кобот вашему предприятию? Если да – то как его выбрать? На эти и другие вопросы мы ответим в данной статье.
Чем отличается кобот от промышленного робота?
Коботы (коллаборативные роботы) отличаются от своих громоздких и сложных в эксплуатации собратьев (промышленных роботов) тем, что могут просто и безопасно работать бок о бок с людьми. Никакого «восстания машин» – только максимум эффективности и рентабельности производства!
Никакого «восстания машин» – только максимум эффективности и рентабельности производства!
Каталог коботов
Что такое «кобот»? Разбираемся в терминах
Прежде всего давайте познакомимся с понятиями из робототехники. Иногда термины «коллаборативные роботы», «роботы с обратной связью» и «коботы» используют в качестве синонимов. Это может сбить с толку.
Нужно сказать, что все это относится к роботизированным устройствам, которые созданы для совместной работы с людьми. Они должны помогать человеку выполнять задачи, которые для него слишком трудны: например, поднимать тяжести и многократно повторять однообразные действия. Количество задач, которые можно поручить роботам-коллегам, практически не ограничено.
Так есть ли разница?
1. Коллаборативные роботы.
Коллаборативные роботы.
По факту, любой коллаборативный робот предназначен именно для работы вместе с людьми – но этот термин очень часто употребляют неправильно. В чем дело? Предполагается, что такой робот, установленный в рабочем пространстве, легко контролируется, безопасен для человека и полагается хотя бы на один из четырех режимов безопасной совместной работы.
Но все это не относится к большинству промышленных роботов, которые также можно использовать для коллаборативных задач. Их движения и сила ничем не ограничены (но надо отметить, что возможна установка специальных датчиков для контроля – как опция): на производстве они могут угрожать здоровью и жизни человека. Для безопасной работы такие механизмы нуждаются в дополнительных системах мониторинга, поэтому их часто окрашивают в яркие цвета и устанавливают в отдельных зонах, например, за ограждением. При любом физическом взаимодействии человека с промышленным роботом механизм необходимо предварительно отключить.
При любом физическом взаимодействии человека с промышленным роботом механизм необходимо предварительно отключить.
В угоду безопасности человека, коботы как правило имеют не большие габаритные размеры и грузоподъёмность как привило от 5 до 25кг (в зависимости от модели). Чего не скажешь о промышленных роботах грузоподьемность которых может достигать до 500 кг. Например промышленный робот Fanuc aka Godzila.
2. Роботы с обратной связью
Робот с обратной связью использует один из четырех типов кооперации, которые присущи коллаборативным роботам. У него есть встроенные датчики, которые обнаруживают удары по нему или аномально приложенную силу и останавливают механизм при малейшем внешнем воздействии, чтобы защитить человека, находящегося рядом. Например, если рука робота вдруг задела работника или какой-то посторонний предмет – она тут же останавливается.
Кроме того, они обычно имеют округлую форму, которая распределяет силу по большей площади, тем самым уменьшая давление удара на внешний объект. У некоторых даже есть мягкие оболочки! В случае столкновения такой механизм причинит гораздо меньше вреда.
У некоторых даже есть мягкие оболочки! В случае столкновения такой механизм причинит гораздо меньше вреда.
3. Коботы
Со словом «кобот» все просто – это краткое наименование коллаборативного робота, причем чаще всего оно относится именно к роботам с обратной связью. Таким образом, робот с обратной связью – это кобот.
Итак, с терминами разобрались. Нужно сказать, что кроме безопасности коллаборативные роботы обладают еще одним серьезным преимуществом: в основном они не требуют глубоких познаний в программировании. При работе с коботами используется динамическое обучение, что позволяет очень быстро установить и включить их в производственный цикл (запуск кобота занимает не более 1 часа). Им не только не нужна отдельная зона – их можно легко перемещать по цеху для выполнения разных работ. Будучи более ловкими и гибкими, чем обычные роботы, коботы могут выполнять множество задач – в том числе те, с которыми до недавнего времени мог справиться только человек.
Им не только не нужна отдельная зона – их можно легко перемещать по цеху для выполнения разных работ. Будучи более ловкими и гибкими, чем обычные роботы, коботы могут выполнять множество задач – в том числе те, с которыми до недавнего времени мог справиться только человек.
Короче говоря, такой робот – идеальный новый сотрудник. Но когда мы нанимаем на работу человека, все ясно: мы смотрим на его опыт, образование и навыки. Но на что же стоит обратить внимание при выборе кобота?
Каталог коботов
Основные характеристики
Давайте разберем характеристики, которые стоит изучить при выборе коллаборативного робота.
1. Полезная нагрузка (Грузоподьемность).
Полезная нагрузка (Грузоподьемность).
Вес, который может нести робот. Она рассчитывается без веса рабочего органа или робота и задана для каждого механизма. Реальная полезная нагрузка – это номинальная полезная нагрузка за вычетом веса конечного захвата.
Ориентируйтесь на вес, который меньше максимальной полезной нагрузки. Насколько? Это зависит от ряда факторов (ускорение, коэффициент трения и т.д.).
2. Досягаемость
Расстояние, на которое максимально может вытянуться сустав робота. Данная характеристика всегда связана с величиной его базы.
3. Максимальная скорость
То, насколько быстро может двигаться конечный захват. Зависит от технических характеристик и размера робота.
Зависит от технических характеристик и размера робота.
Примечание:
Коботы могут работать очень быстро, что бывает небезопасно в определенных ситуациях. Многие имеют «режим совместной работы», в котором скорость ограничена 250 мм/с, но их фактическая максимальная скорость часто может быть намного выше.
4. Степени свободы
Количество осей, вокруг которых робот может двигаться. Чем больше степеней свободы имеет робот, тем больше различных движений он сможет делать, тем больше у него возможностей. Чаще всего встречается шесть степеней свободы: по одной для каждой из трех основных осей (X, Y и Z) и вращение вокруг них. У робота более шести степеней свободы? Значит, он может достичь заданного положения в двух различных конфигурациях.
5. Повторяемость
В мире коботов этот показатель фактически бесполезен. Их обычно программируют обучением или вручную, и способность точно воссоздать движение гораздо ценнее высокоточного перехода в заданное положение.
Интересный факт: большинство производителей указывают в спецификациях худшую повторяемость. Вероятно, при тестировании робота вы получите показатель выше ожидаемого.
6. Цена робота
Часто при выборе робота люди в первую очередь обращают внимание на его стоимость. При этом более правильно оценивать пользу, а значит – и прибыль, которую он способен принести предприятию за счет того или иного набора функций.
7. Масса
Данная характеристика показывает вес робота без его контроллера.
8. Способ монтажа
Большинство роботов устанавливаются на каком-либо верстаке или на полу, но некоторые необходимо закрепить на стене или даже потолке. Данная характеристика подскажет, возможно ли это сделать.
9. Потребляемая мощность
Средняя мощность, которую кобот использует во время работы. Это позволит оценить стоимость его запуска и эксплуатации.
10. Температура эксплуатации
То, при какой максимальной температуре сможет работать коллаборативный робот.
11. Интерфейсы коммуникации
У роботов много способов передачи данных с другими компонентами роботизированного узла. У большинства есть, как минимум, протокол связи на основе Ethernet, такой как Ethernet TCP/ IP, Modbus TCP или Profinet. Некоторые оснащены системами последовательной. Один из самых популярных режимов связи – это Modbus RTU, который часто используется для получения команд и отправки данных роботу.
Некоторые оснащены системами последовательной. Один из самых популярных режимов связи – это Modbus RTU, который часто используется для получения команд и отправки данных роботу.
12. Классификация IP (степень защиты оболочки) International Protection Marking
Насколько хорошо робот противостоит пыли и жидкостям? Классификация IP состоит из двух чисел, которые соответственно указывают на защиту робота от твердых частиц и от проникновения жидкости. Минимальный IP может быть разным в зависимости от задачи.
13. Сертификаты соответствия
Различные сертификаты соответствия качества позволяют производителям демонстрировать уровень безопасности своих роботов более наглядно для потребителя. Многие стремятся получить сертификацию TUV (Technischer Überwachungsverein или объединение технического надзора), поскольку у них одни из самых строгих процессов утверждения.
Как оценить безопасность кобота?
Хотя большинство производителей коботов позиционируют их как «безопасные по своей природе», правда в том, что большинство имеют ограничение лишь по датчику силы. Другие системы безопасности при этом не используются.
Другие системы безопасности при этом не используются.
Безопасный по умолчанию
В роботах данного типа могут использоваться любые системы безопасности. Их главное отличие в том, что они не могут причинить вреда в принципе.
Как это возможно? Дело в том, что такие коботы слишком слабы, чтобы нанести травмы, даже если система даст сбой. Обычно для них подразумевается полезная нагрузка до 1 кг.
Роботы с суставными сенсорами
Это – самый распространенный тип роботов с обратной связью. Они имеют датчики, позволяющие контролировать приложенную силу. Некоторые роботы измеряют входную мощность своих двигателей, в других же используются датчики усилия, встроенные в суставы. Этот тип прост в работе: достаточно ввести пару настроек безопасности в контроллер – и робот готов к запуску.
Роботы с датчиком усилия
Такие роботы имеют большой датчик усилия в основании (базе), который отслеживает все, что с ними происходит. Если кобот запрограммирован на движение в заданном направлении, но что-то мешает ему двигаться, датчик усилия обнаружит аномальный вектор силы и переведет кобота в аварийный режим.
Если кобот запрограммирован на движение в заданном направлении, но что-то мешает ему двигаться, датчик усилия обнаружит аномальный вектор силы и переведет кобота в аварийный режим.
Это позволяет использовать больших роботов с высокой грузоподъемностью, обеспечив им достаточно чувствительную реакцию на внешнее воздействие. Именно так компании часто превращают своих промышленных роботов в коботов, чтобы с новыми преимуществами продолжить работу в привычной экосистеме.
Роботы с датчиками касания
Данный тип пока менее распространен в отрасли: необходимые для него датчики дороги и сложны в производстве. Но, пожалуй, это самый оптимальный и безопасный для людей вариант. В таких роботах используются различные датчики тактильного ощущения для определения столкновения с человеком, которые измеряют проводимость объекта, с которым робот столкнулся, и автоматически останавливают его, если величина достигает определенного порога.
Этапы внедрения робота в производственный процесс
Перед тем, как кобот займет достойное место рядом с коллегами-людьми, вам необходимо пройти через три этапа внедрения его в производственный процесс. Следуя описанной в статье методологии, вы максимально точно подберете и настроите кобота под ваши задачи. На каждом из этим этапов есть ключевой критерий — обратите на него внимание в первую очередь.
Этап №1. Проектирование и проработка технического дизайна.
После того, как вы выбрали на своем производстве задачу, которую хотите автоматизировать, вам нужно проанализировать её по частям. Какой инструмент используется, сколько времени тратит сотрудник на её выполнение, какого качества результат получается на выходе, и т. д. Оценив данные критерии, можно вы сможете грамотно проработать будущую стратегию управления роботом.
д. Оценив данные критерии, можно вы сможете грамотно проработать будущую стратегию управления роботом.
Самое сложное в дальнейшем этапе проработки технического дизайна– выбрать инструмент, которым кобот будет пользоваться. Вам требуется сопоставить инструмент сотрудника с имеющимся перечнем подходящих инструментов для робота. Учитывая огромное количество вариантов, представленных на рынке, главные критерий по выбору робота на данном этапе — это совместимость с необходимым именно вам инструментом. Готовое решение сильно упрости процесс ввода робота в эксплуатацию.
Этап №2. Инсталляция
Итак, вы выбрали и купили робота. Теперь нужно выполнить его инсталляцию, запрограммировать и заставить работать. Вероятнее всего, этим займется человек, у которого есть множество других текущих задач – и нет ученой степени в области робототехники. Потому на данном этапе самым важным критерием в выбор робота будет простота программирования и быстрое обучение, ведь пока происходит интеграция робота в рабочую цепочку, простаивает весь производственный процесс. Как только необходимая для работы программа будет составлена, сотрудник сможет вернуться к своим обычным задачам. В случае с коботами Doosan – процесс программирования очень простой в виду, того что есть машинное обучение.
Вероятнее всего, этим займется человек, у которого есть множество других текущих задач – и нет ученой степени в области робототехники. Потому на данном этапе самым важным критерием в выбор робота будет простота программирования и быстрое обучение, ведь пока происходит интеграция робота в рабочую цепочку, простаивает весь производственный процесс. Как только необходимая для работы программа будет составлена, сотрудник сможет вернуться к своим обычным задачам. В случае с коботами Doosan – процесс программирования очень простой в виду, того что есть машинное обучение.
Этап №3. Эксплуатация
На данном этапе мы анализируем работу уже внедрённого в производственный процесс робота, и вносим в него правки. Например, для уменьшения количества брака на линии, или для наращивания скорости производства мы должны знать реальные показатели продуктивности кобота. В этом нам поможет критерий совместимости конкретной модели робота со сторонним программным обеспечением. Существует ПО, которое синхронизируется с коботом, рассчитает его производительность и способы ее повышения, а также оперативно сообщает, если робот экстренно остановится. Да, за него придется заплатить – но данные затраты с лихвой окупаются за год оптимизированного и беспрерывного производства.
Например, для уменьшения количества брака на линии, или для наращивания скорости производства мы должны знать реальные показатели продуктивности кобота. В этом нам поможет критерий совместимости конкретной модели робота со сторонним программным обеспечением. Существует ПО, которое синхронизируется с коботом, рассчитает его производительность и способы ее повышения, а также оперативно сообщает, если робот экстренно остановится. Да, за него придется заплатить – но данные затраты с лихвой окупаются за год оптимизированного и беспрерывного производства.
Каталог коботов
А на этом у нас все! Большое спасибо за чтение, надеемся обзор был для Вас полезен!
Приобрести Коботов, роботов манипуляторов или другую ЧПУ или 3Д технику и расходные материалы, задать свой вопрос, или сделать предложение, вы можете, связавшись с нами:
Не забывайте подписываться на наш YouTube канал :
Вступайте в наши группы в соц. сетях:
сетях:
ВКонтакте
Не дайте себя обмануть — Amazon Astro — это не домашний робот, это камера на колесах
Вчера Amazon анонсировала своего «домашнего робота» — колесное устройство под названием Astro с дисплеем, набором датчиков и камерой, которая высовывается из верхней части его тела, как мачта. В рекламе Astro Amazon представляет устройство как инженерный прорыв и реализацию давней научно-фантастической мечты: создать робота, который может помогать по дому.
Это ерунда, конечно.Что Astro — хорошо это или плохо — это камера на колесах.
Астро точно не сможет достать для вас пиво
Физические ограничения Astro очевидны. У него нет рук или манипуляторов; нет никакого способа взаимодействовать с миром, кроме как натыкаться на объекты на высоте голени. Он не может перемещаться по шагам, и, по словам сотрудников, которые работали над роботом и общались с Vice , он хрупок и склонен к самоуничтожению. «Astro ужасен и почти наверняка бросится с лестницы, если представится такая возможность», — сказал один из изданий.(О, и он абсолютно не может получить пиво для вас — повторяющийся мем, когда компании пытаются раскрутить домашних роботов).
«Astro ужасен и почти наверняка бросится с лестницы, если представится такая возможность», — сказал один из изданий.(О, и он абсолютно не может получить пиво для вас — повторяющийся мем, когда компании пытаются раскрутить домашних роботов).
Но Amazon по-прежнему предлагает клиентам довольно много Astro, и тем, кто беспокоится о последствиях этой технологии для конфиденциальности, необходимо учитывать базовую полезность устройства. Amazon говорит, что Astro будет использовать распознавание лиц, чтобы идентифицировать людей в вашем доме и распознавать злоумышленников. (Опять же, Vice сообщает, что эта функция плохо работает в реальном мире.) Бота можно настроить на «патрулирование» вашего дома ночью, его можно активировать и управлять им удаленно, позволяя вам заглянуть в его камеру перископа с телефона. В рекламе Amazon пара использует эту функцию, чтобы еще раз проверить, выключили ли плиту.
Это глупо, но тоже полезно. Это функции, которые многие люди захотят. Каждый заботится о безопасности своего дома, и если вы уже инвестируете в домашнее наблюдение, но не хотите ставить камеру в каждой комнате, то Astro может показаться привлекательным решением.(Будут ли люди платить 999 долларов за удовольствие и действительно ли Astro будет работать так, как было обещано, остается открытым вопросом.)
Это функции, которые многие люди захотят. Каждый заботится о безопасности своего дома, и если вы уже инвестируете в домашнее наблюдение, но не хотите ставить камеру в каждой комнате, то Astro может показаться привлекательным решением.(Будут ли люди платить 999 долларов за удовольствие и действительно ли Astro будет работать так, как было обещано, остается открытым вопросом.)
Также стоит помнить, что, хотя многие люди не доверяют Amazon или не любят его из-за его постоянно ужасающего жестокого обращения с рабочими, уничтожения профсоюзов и уклонения от уплаты налогов, компания на самом деле остается довольно любимой американской общественностью. В опросе The Verge , проведенном в 2020 году, Amazon произвела самое благоприятное впечатление в США среди всех технологических компаний и была признана второй по степени доверия после Microsoft.Так что тот факт, что Amazon продает эту передвижную камеру, не обязательно оттолкнет людей от продукта.
Astro также важен для большой стратегии Amazon. Видение компании в области технологий заключается в том, чтобы объединить компьютеры в сеть из датчиков, интеллектуальных динамиков, камер и цифровых помощников, интегрированных в дома пользователей. Компания хочет обеспечить удобство, организовав жизнь клиентов, в идеале за периодическую абонентскую плату, как и в случае с ее службой доставки Prime.А с тех пор, как в 2018 году компания Ring приобрела компанию по производству видеодомофонов, домашняя безопасность и наблюдение стали все более важной частью этого предложения. Так что, хотя многие будут жаловаться, что Astro — это, по сути, устройство для наблюдения, Amazon это вполне устраивает.
Видение компании в области технологий заключается в том, чтобы объединить компьютеры в сеть из датчиков, интеллектуальных динамиков, камер и цифровых помощников, интегрированных в дома пользователей. Компания хочет обеспечить удобство, организовав жизнь клиентов, в идеале за периодическую абонентскую плату, как и в случае с ее службой доставки Prime.А с тех пор, как в 2018 году компания Ring приобрела компанию по производству видеодомофонов, домашняя безопасность и наблюдение стали все более важной частью этого предложения. Так что, хотя многие будут жаловаться, что Astro — это, по сути, устройство для наблюдения, Amazon это вполне устраивает.
Amazon имеет чрезвычайно темную историю, когда дело доходит до слежки
Лично я считаю, что Астро — недоработанная концепция и часть опасной тенденции вездесущей и бездумной слежки. Хотя я принимаю тот факт, что многие люди хотят иметь дома такие технологии, Amazon, в частности, неоднократно демонстрировала отсутствие заботы и честности в разработке таких технологий. В прошлом компания продавала системы распознавания лиц с расовой предвзятостью и камеры видеонаблюдения, которые можно было взломать. она активно сотрудничает с правоохранительными органами и использует тактику запугивания, чтобы навязать свою продукцию потребителям. Глядя на эту историю, я не понимаю, почему кто-то из может доверить Amazon наблюдение за такого рода системами.
В прошлом компания продавала системы распознавания лиц с расовой предвзятостью и камеры видеонаблюдения, которые можно было взломать. она активно сотрудничает с правоохранительными органами и использует тактику запугивания, чтобы навязать свою продукцию потребителям. Глядя на эту историю, я не понимаю, почему кто-то из может доверить Amazon наблюдение за такого рода системами.
Но именно здесь обличие Астро как «домашнего робота» становится полезным. Для многих людей, которые смотрят на Astro, это может показаться просто новинкой — на самом деле, его уже сравнивают с роботами-«домашними животными», такими как Aibo.Но я думаю, что, как и в случае с очками Ray-Ban с камерой на Facebook, цель Astro не в том, чтобы решить какую-то конкретную проблему, а в том, чтобы нейтрализовать основную концепцию: приучить людей к камере, которая постоянно перемещается по дому. Astro — это не домашний робот, это камера на колесах, и это именно то, чего хочет Amazon.
Роботизированные механизмы – КУЛАЧКОВЫЕ МЕХАНИЗМЫ 51050
Что такое кулачок? – Что такое КУЛАЧКОВЫЕ МЕХАНИЗМЫ?
Кулачок представляет собой механический компонент , способный передавать движение толкателю посредством прямого контакта . В кулачковом механизме кулачок является ведущим, а ведомый элемент называется толкателем . Толкатель может оставаться неподвижным, перемещаться, колебаться или вращаться .
В кулачковом механизме кулачок является ведущим, а ведомый элемент называется толкателем . Толкатель может оставаться неподвижным, перемещаться, колебаться или вращаться .
Широко используемый открытый радиально-кулачковый механизм показан на рис. ниже. Роликовый толкатель является наиболее распространенным толкателем, используемым в этих механизмах, поскольку он может эффективно передавать мощность между кулачком и толкателем за счет уменьшения трения и сведения к минимуму износа между ними.Показанная здесь конструкция называется кулачком , ограничивающим силу тяжести ; он прост и эффективен, и его можно использовать с вращающимся диском или концевыми кулачками, если вес следящей системы достаточен, чтобы поддерживать ее в постоянном контакте с профилем кулачка. Однако в большинстве практических кулачковых механизмов кулачок и толкатель на всех рабочих скоростях ограничены предварительно нагруженными пружинами сжатия.
Кулачки могут быть выполнены тремя способами:
• Придание корпусу кулачка какой-либо известной кривой, такой как спираль, парабола или дуга окружности
• Математическое проектирование кулачка для определения движения толкателя, а затем построение табличных данных для формирования кулачка
• Рисование профиля кулачка от руки с использованием различных построение кривых
Третий метод приемлем только в том случае, если движение кулачка предназначено для низких скоростей, которые позволяют использовать плавную, «безударную» кривую.
В ситуациях, когда встречаются более высокие нагрузки, масса, скорость или эластичность элементов, необходимо провести подробное исследование как динамических аспектов кривой кулачка, так и точности изготовления кулачка. Многие виды машин включают кулачки, особенно те, которые работают автоматически, такие как печатные станки, текстильные ткацкие станки, зуборезные станки и винтовые станки.
Классификация кулачковых механизмов
Кулачковые механизмы можно классифицировать по их входным/выходным движениям, конфигурации и расположению толкателя и форме кулачка .Кулачки также можно классифицировать по типам движений, совершаемых толкателем, и характеристикам профиля кулачка.
Возможные виды входных/выходных движений кулачковых механизмов с наиболее распространенными дисковыми кулачками показаны на рис. а–е; это примеры вращающихся дисковых кулачков с перемещающимися толкателями. Напротив, на рис. f показан рычаг толкателя с роликом, который качается или колеблется по дуге окружности относительно шарнира толкателя при вращении кулачка.Конфигурации повторителя на рис. от a до d названы в соответствии с их характеристиками:
а–е; это примеры вращающихся дисковых кулачков с перемещающимися толкателями. Напротив, на рис. f показан рычаг толкателя с роликом, который качается или колеблется по дуге окружности относительно шарнира толкателя при вращении кулачка.Конфигурации повторителя на рис. от a до d названы в соответствии с их характеристиками:
-лезвие ножа;
– ролик b, e и f;
-c с плоской поверхностью;
-и д сферические.
Торец плоского толкателя также может быть наклонен по отношению к кулачку. Толкатель — это элемент, который перемещается вверх и вниз или из стороны в сторону, повторяя контур кулачка .
Существует два основных типа толкателя: встроенный и смещенный. Осевая линия роликового толкателя проходит через осевую линию распределительного вала. На рисунках от a до d (сверху) показаны пять толкателей, которые перемещаются в плоскости, перпендикулярной оси вращения распределительного вала.
На рисунках от a до d (сверху) показаны пять толкателей, которые перемещаются в плоскости, перпендикулярной оси вращения распределительного вала.
В отличие от этого, центральная линия толкателя смещения, как показано на Рис. e (выше), не проходит через центральную линию распределительного вала. Величина смещения – это расстояние по горизонтали между двумя осевыми линиями.Смещение толкателя уменьшает боковую нагрузку, создаваемую толкателем роликов.
На рис. f (вверху) показан перемещающийся или вращающийся толкатель маятника, который должен быть ограничен для сохранения контакта с профилем кулачка. Наиболее распространенные вращающиеся дисковые или пластинчатые кулачки могут иметь различные формы, включая смещенные круглые, яйцевидные, овальные, кардиоидные или сердцевидные.
Рифленый кулачок
Большинство кулачков установлены на вращающемся валу. Кулачок и толкатель должны быть ограничены на всех рабочих скоростях, чтобы они оставались в тесном контакте на протяжении всего цикла, если кулачковый механизм должен работать правильно. Толкатели обычно подпружинены, чтобы поддерживать постоянный контакт с фигурной поверхностью кулачка, но ограничение силы тяжести по-прежнему возможно.
Толкатели обычно подпружинены, чтобы поддерживать постоянный контакт с фигурной поверхностью кулачка, но ограничение силы тяжести по-прежнему возможно.
Если предполагается, что кулачковый механизм будет подвергаться сильным ударам и вибрации , можно использовать дисковый кулачок с канавками , как показано на Рис. Канавка A . Контур кулачка фрезерован на поверхности диска, так что ролик толкателя кулачка будет ограничен и непрерывно ограничен боковыми стенками канавки в течение цикла кулачка.Канавка ограничивает следящий ролик во время всего вращения кулачка. В качестве альтернативы канавка может быть фрезерована на внешней окружности цилиндра или цилиндра для формирования цилиндрического или бочкообразного кулачка, как показано на рис. Канавка B . Толкатель этого кулачка может перемещаться или колебаться. Аналогичная канавка также может быть фрезерована вокруг конической внешней поверхности конического кулачка с канавками.
Идеи дизайна с кулачковыми механизмами
Родственные термины:
базовая окружность: Окружность с наименьшим радиусом от центра кулачка до любой части профиля кулачка.
Профиль кулачка: Внешняя поверхность дискового кулачка после механической обработки.
ход толкателя: Для роликового толкателя дискового кулачка это вертикальное расстояние хода толкателя, измеренное в центральной точке ролика, когда он перемещается от базовой окружности к профилю кулачка.
события движения: Когда кулачок совершает один цикл, толкатель проходит подъемы, остановки и возвраты. Подъем – это движение толкателя от центра кулачка; задержка происходит, когда последователь отдыхает; а возврат – это движение толкателя к центру кулачка.
кривая шага: Для роликового толкателя дискового кулачка это траектория, создаваемая центральной точкой ролика при вращении толкателя вокруг неподвижного пластинчатого кулачка.
угол давления: Для роликового толкателя дискового кулачка это угол в любой точке между нормалью к кривой шага и мгновенным направлением движения толкателя. Этот угол важен для конструкции кулачка, поскольку он указывает на крутизну профиля кулачка.
основная окружность (опорная окружность): Для роликового толкателя дискового кулачка это окружность с кратчайшим радиусом от центра кулачка до делительной кривой.
ход или бросок: Наибольшее расстояние или самый широкий угол , под которым перемещается или вращается толкатель.
рабочая кривая: Рабочая поверхность кулачка, контактирующего с толкателем. Для роликового толкателя пластинчатого кулачка это путь, прочерченный центром ролика вокруг профиля кулачка.
Механические кулачки по-прежнему доступны для роботизированных задач
Недавно на LinkedIn я разместил комментарий Скотта Эванса из Коллморгена, в котором подробно описываются преимущества современных конструкций с сервоприводом.
В ответ один читатель — инженер-конструктор машин и независимый подрядчик машин Джон Холлер — написал вдумчивое напоминание о том, что механические кулачки по-прежнему являются приемлемым вариантом для многих конструкций. Фактически, новые программные средства сделали конструкции механических кулачков более сложными и конкурентоспособными, чем когда-либо.
Вот что сказал Джон.
Я прочитал статью Скотта Эванса, которую вы опубликовали. Это хорошая статья об управлении машиностроением… и, конечно же, производитель, на которого он работает, продает серводвигатели.
Но я мало что видел на сравнениях механических кулачков и серводвигателей…
… и с новым программным обеспечением CAE проектирование механических кулачков стало быстрее и совершеннее, чем когда-либо.
Это означает, что игровое поле теперь немного выровнено.
Множество преимуществ механических кулачковСинхронизация присуща профилю кулачка, что полезно, когда несколько кулачков работают синхронно (в многоосевых конструкциях). Нет ошибок, вызывающих помехи и последующий ущерб; также нет времени простоя для процедур возврата в исходное положение.
Механический кулачковый механизм является высокотехнологичным с инженерной точки зрения (благодаря новым программным инструментам, которые делают их конструкцию более совершенной, чем когда-либо), но их работа является низкотехнологичной. Кроме того, механические кулачки не требуют особого обслуживания, отличаются длительным сроком службы и минимальным износом компонентов.
Применение механических кулачков в робототехнике В робототехнике концевой эффектор — это устройство на конце манипулятора, которое каким-либо образом взаимодействует с заготовками или окружающей средой. Точная геометрия этого устройства, также называемого инструментом на конце руки или EOAT, зависит от области применения робота. Рычаги также имеют концевые эффекторы – и здесь кулачки могут стимулировать движение, которое может исходить от кулачков.
Точная геометрия этого устройства, также называемого инструментом на конце руки или EOAT, зависит от области применения робота. Рычаги также имеют концевые эффекторы – и здесь кулачки могут стимулировать движение, которое может исходить от кулачков.
В некоторых конфигурациях несколько концевых эффекторов собираются вместе в непосредственной близости, в то время как кулачки, управляющие их сложными ходами, работают удаленно. Это особенно полезно, когда требуемый размер двигателя — достаточный для перемещения прикладных нагрузок — и механизмы для преобразования вращательного движения в поступательное не вписываются в проектное пространство.
На самом деле, механические кулачки обеспечивают воспроизводимую высокоскоростную синхронизацию в непосредственной близости от места, где станки соприкасаются с заготовками… чего не всегда можно сказать о серводвигательных системах.
Другие преимущества механических кулачков включают в себя то, что они потребляют мало энергии в некоторых приложениях.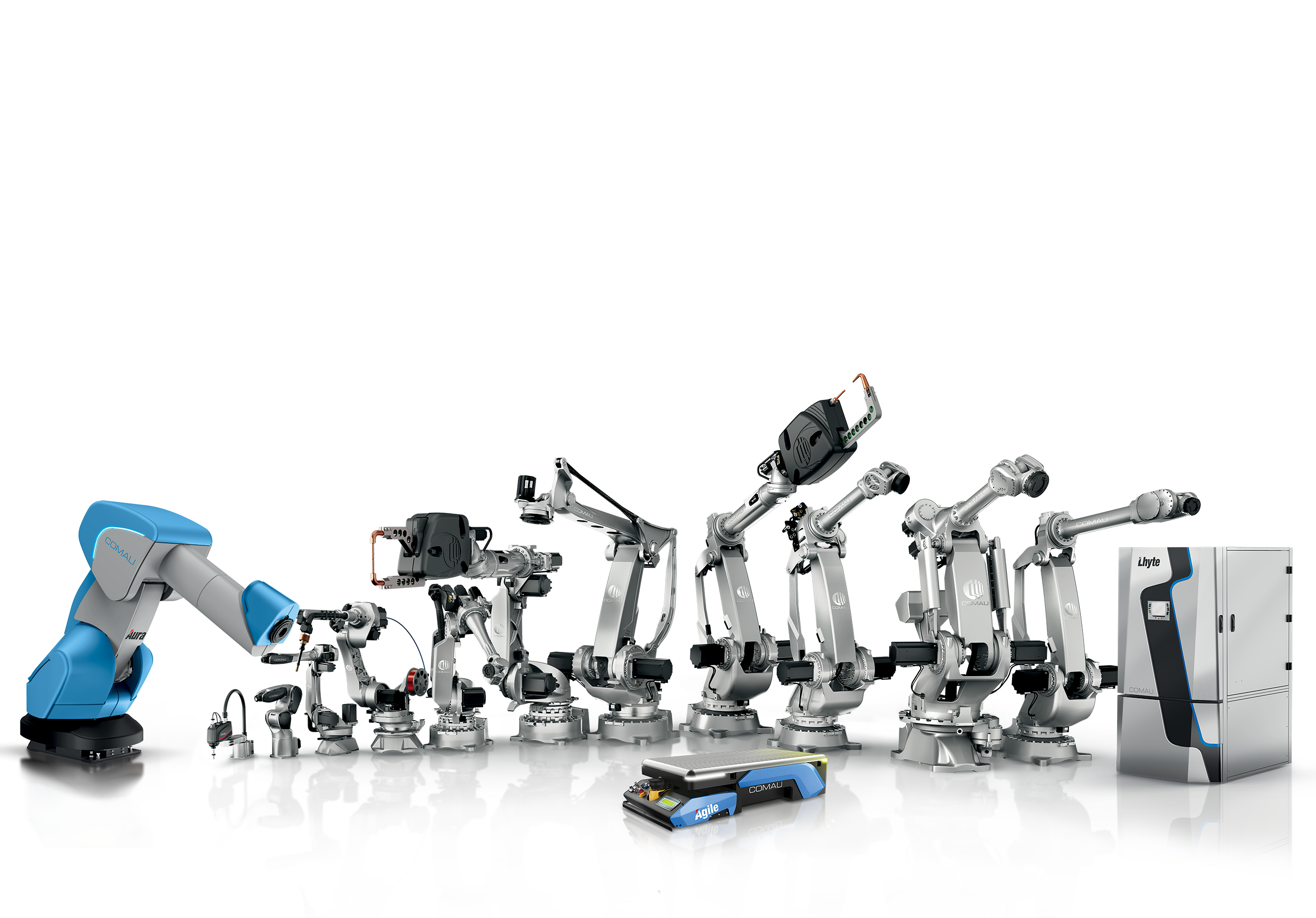 Кроме того, программное обеспечение CAD/CAM значительно упрощает программирование станков с ЧПУ, включающих механические кулачки. Кроме того, последнее поколение режущих инструментов с покрытием ускоряет изготовление кулачков… а закаленная инструментальная сталь теперь может быть обработана фрезерованием для чистовой обработки.
Кроме того, программное обеспечение CAD/CAM значительно упрощает программирование станков с ЧПУ, включающих механические кулачки. Кроме того, последнее поколение режущих инструментов с покрытием ускоряет изготовление кулачков… а закаленная инструментальная сталь теперь может быть обработана фрезерованием для чистовой обработки.
Все конструкции имеют недостатки, и механические кулачки не исключение. Самым большим недостатком является отсутствие гибкости, если ожидаются изменения продукта. Механические кулачки также не могут выполнять бесконечные положения и выполнять несколько перемещений с помощью одного EOAT — как это делают столы XYZ при интеграции в фрезерные станки и другие сборочные процессы.
Для получения дополнительной информации о том, подходят ли механические кулачки для вашей конструкции, свяжитесь с Holler Machine Design and Automation по адресу hollerdesigns.ком.
Робот на StereoPi, часть 1: камеры «рыбий глаз» | Евгений Помазов | StereoPi
Целью этой серии статей является создание компактного внутреннего робота, способного перемещаться с помощью стереозрения. В качестве платформы для него мы будем использовать небольшую платформу Dagu RP5 на имеющихся у нас гусеницах. Вот как это выглядит рядом со StereoPi.
В качестве платформы для него мы будем использовать небольшую платформу Dagu RP5 на имеющихся у нас гусеницах. Вот как это выглядит рядом со StereoPi.
В отличие от самолетов и коптеров, он не сможет улететь. При этом он не повредит мебель и не наделает беспорядка во время испытаний, как это могут сделать его более тяжелые аналоги.
Так как мы хотим, чтобы StereoPi выполнял все функции управления роботом сразу, нам нужно учесть все «деликатные места» производительности Raspberry Pi в данном случае. Этим «твикам» и «хакам» мы посвятим специальные разделы статей и даже целые статьи в этой серии. Например, мы будем использовать стереокамеры в режиме сканирующего лидара, а также ловко обойдем некоторые аппаратные ограничения, чтобы увеличить FPS нашего решения. Но каждой вещи в свое время!
Я очень хорошо помню один из самых первых экспериментов нашей команды с дистанционным управлением моделью автомобиля, оснащенной камерой.Мы проводили тесты в нашем офисе, машина стояла в одной комнате, а я в другой, соседней. Подключил и увидел картинку с камеры. Я нажал на газ, но машина странно дернулась и медленно «понеслась» в сторону. Не понимая, что происходит, я решил немного отступить. И тогда все встало на свои места. В левой части изображения камеры я увидел ножку офисного стула! Наш краулер упирался в него левой стороной корпуса. Но я не смог увидеть это через камеру.Почему? Потому что камера имела штатный угол обзора (около 50 градусов). С тех пор прошло почти 10 лет, мы сделали много проектов для радиомоделей и хорошо усвоили: чем больше угол камеры, тем лучше. Мы предпочитаем использовать оптику с углом обзора от 160 до 220 градусов.
Подключил и увидел картинку с камеры. Я нажал на газ, но машина странно дернулась и медленно «понеслась» в сторону. Не понимая, что происходит, я решил немного отступить. И тогда все встало на свои места. В левой части изображения камеры я увидел ножку офисного стула! Наш краулер упирался в него левой стороной корпуса. Но я не смог увидеть это через камеру.Почему? Потому что камера имела штатный угол обзора (около 50 градусов). С тех пор прошло почти 10 лет, мы сделали много проектов для радиомоделей и хорошо усвоили: чем больше угол камеры, тем лучше. Мы предпочитаем использовать оптику с углом обзора от 160 до 220 градусов.
Давайте рассмотрим простой пример — мы будем снимать одну и ту же сцену с двух камер Raspberry, расположенных рядом. Одна из них — обычная камера V2 с углом обзора 62,2 градуса (согласно ее документации), а другая — широкоугольная камера Waveshare G с углом обзора 160 градусов.
Мы быстро соорудили эту простенькую штуковину для фотосессии:
Посмотрим на разницу между картинками с двух камер:
Очевидно, что широкоугольная камера видит ЗНАЧИТЕЛЬНО больше, чем обычная. Но можно использовать камеры с 200-градусной оптикой, тогда поле зрения будет еще шире! Например, Waveshare M, которые мы использовали в наших экспериментах с 360-градусными фотографиями.
Но можно использовать камеры с 200-градусной оптикой, тогда поле зрения будет еще шире! Например, Waveshare M, которые мы использовали в наших экспериментах с 360-градусными фотографиями.
Отсюда вывод первый — нашему роботу нужна широкоугольная оптика.Поэтому будем использовать камеры Waveshare G (которые, кстати, шли в комплекте Deluxe StereoPi).
Для этой серии статей мы взяли кодовую базу наших стереопи-туториальных примеров, но внесли в них существенные изменения. Если вы еще не видели предыдущую статью, рекомендую посмотреть, так как кодовая база и подходы взяты оттуда.
Цель состоит в том, чтобы получить пространственную карту окружающей среды, чтобы робот мог ориентироваться. Для этого нужно построить карту глубины.Но для этого важно откалибровать камеры (поскольку установить их абсолютно параллельно невозможно). Для калибровки нужно сделать серию снимков и по ним сделать эту самую калибровку. Для выполнения каждого из этих шагов мы разработали отдельный скрипт, о котором я расскажу далее.
Вот наш репозиторий на Github Stereopi-fisheye-robot.
1. Тестовый сценарий —
1_test.pyЭтот сценарий используется для проверки работоспособности и производительности системы.Он не сильно изменился по сравнению с предыдущим уроком. Чтобы выйти из скрипта, нажмите кнопку Q на клавиатуре. При выходе скрипт сохраняет последний кадр как изображение. Это может пригодиться вам позже для точной настройки вашей карты глубины. Поэтому, прежде чем нажимать Q, отверните стереокамеру от лица (куда она обычно направлена при первых тестах) и наведите ее на сцену с предметами на разном расстоянии.
2. Скрипт для съемки серии кадров для калибровки — 2_chess_cycle.py
Этот скрипт тоже похож на тот, что был из первой серии.Съемка калибровочной серии имеет свои нюансы, но вы все равно это не прочитаете, пока не возникнут проблемы с калибровкой, поэтому мы их опишем позже. ☺
Скрипт выведет и сохранит 30 изображений с наложением калибровочной шахматной доски, которые система будет использовать для калибровки.
3. Разрезание изображений на пары — 3_pairs_cut.py
Скрипт разрезает кадры из последнего этапа на левую и правую фотографии. Это упрощает работу и дальнейшую отладку. Логика скрипта также не изменилась по сравнению с предыдущим мануалом.
4. Проведем калибровку! — 4_dication_fisheye.py
‘В чем проблема? Просто начните калибровку с предыдущего примера — и Боб станет вашим дядей!», — подумаете вы. Не так быстро. Мы закончили с краткими описаниями сценариев и переходим к части TL;DR.
Фото Натаниэля Уайлдера, ссылкаПопробуем нырнуть чуть глубже в холодную воду. Скрипт калибровки из нашего предыдущего стереопи-туториала предназначен для работы с обычными камерами. Если пропустить через него изображения с широкоугольных камер, то в лучшем случае вы получите нормальное изображение в центре и искаженное по краям, а в худшем – непонятные авангардистские рисунки.
Причина проста: в библиотеках OpenCV есть две отдельные модели камер — обычная («пинхол») и широкоугольная («рыбий глаз»). Последний отличается наличием в своей математической модели двух дополнительных параметров, а именно матриц K и D. Вы еще не испугались? Не волнуйтесь, мы уже добавили эти параметры в текущую версию скрипта. Они будут рассчитаны автоматически.
Последний отличается наличием в своей математической модели двух дополнительных параметров, а именно матриц K и D. Вы еще не испугались? Не волнуйтесь, мы уже добавили эти параметры в текущую версию скрипта. Они будут рассчитаны автоматически.
Давайте нырнем немного глубже, ради самых любознательных людей.В предыдущей версии наших скриптов мы активно использовали внешние библиотеки калибровки стереозрения, которые сделали за нас очень много работы «изнутри». В этом выпуске скриптов мы вложили все волшебство прямо в наш код скрипта. Да, они стали немного тяжелее и несколько сложнее в анализе, но теперь все перед вами, а скрипты не имеют зависимостей от сторонних библиотек. Если вы дочитали до этого места в этом абзаце, то вы один из тех, кто почувствует себя обязанным поиграть со всеми доступными параметрами.В завершение этого абзаца я поделюсь с вами одним из самых успешных анализов практического использования модели широкоугольной камеры в Python:
Калибровка объектива «рыбий глаз» с помощью OpenCV — часть 1 2
Теперь вернемся к нашим баранам. Если вы посмотрите на код скрипта, то обнаружите следующую логику (упрощенную):
Если вы посмотрите на код скрипта, то обнаружите следующую логику (упрощенную):
— Сначала мы калибруем каждую камеру отдельно, чтобы убрать бочкообразную дисторсию. На этом этапе картинка с левой и правой камеры «выпрямляется».
— Второй шаг — откалибровать и выпрямить стереопару, передав ей обнаруженные параметры каждой камеры.
Если установить все переменные в True в разделе #Параметры визуализации, то скрипт покажет вам все шаги, начиная с поиска шахматной доски, показа “исправленных” картинок с каждой камеры отдельно, и заканчивая выпрямленная стереопара.
Ну, кажется, ты уже знаешь кунг-фу, не так ли? Где эта карта глубины?
Еще раз, не так быстро.Здесь мы решаем прикладную задачу, поэтому я просто обязан рассказать вам об обходе еще двух ловушек.
Ловушка 1 — захват стереовидео в низких разрешениях
Как вы помните, для простоты расчета мы работаем с разрешением 320х240 (вопрос его увеличения мы рассмотрим в следующих статьях). Но если снимать стереопару сразу в нужном разрешении 640х240, то на картинке будут глюки (смещения и зеленые полосы). Это баг в реализации PiCamera, и его можно обойти, снимая картинку с удвоенным разрешением (1280×480), а затем уменьшая вдвое с помощью GPU (без нагрузки на основной процессор).Это решение уже было реализовано в прошлых скриптах, но выделю его для тех, кто только знакомится с темой.
Но если снимать стереопару сразу в нужном разрешении 640х240, то на картинке будут глюки (смещения и зеленые полосы). Это баг в реализации PiCamera, и его можно обойти, снимая картинку с удвоенным разрешением (1280×480), а затем уменьшая вдвое с помощью GPU (без нагрузки на основной процессор).Это решение уже было реализовано в прошлых скриптах, но выделю его для тех, кто только знакомится с темой.
Ловушка 2. Подвеска…
Вторая ловушка интереснее, и пользователи наших стереопи-туторских скриптов часто попадают в нее, даже с обычными узкоугольными камерами. Суть в том, что вы можете получить плохие или очень плохие результаты калибровки с, казалось бы, хорошими входными изображениями. При использовании старой логики можно получить такие результаты, например:
Как вам красивые «кривые» искажения на верхнем левом рисунке? Это лишь маленькое проявление проблемы.
Причина довольно проста. Так как у нас рабочее разрешение при построении карты глубины 320х240, мы использовали его во всех скриптах, включая калибровочные. Но при таких малых разрешениях алгоритм нахождения углов шахматной доски часто ошибается — либо не находит углы вовсе, либо находит их не в тех местах и не соответствует их последовательности. Проблема усугубляется при использовании широкоугольных камер. Поэтому мы решили использовать в этих скриптах лайфхак: использовать для калибровки изображения большего разрешения, а затем использовать результаты калибровки на изображениях меньшего размера!
Но при таких малых разрешениях алгоритм нахождения углов шахматной доски часто ошибается — либо не находит углы вовсе, либо находит их не в тех местах и не соответствует их последовательности. Проблема усугубляется при использовании широкоугольных камер. Поэтому мы решили использовать в этих скриптах лайфхак: использовать для калибровки изображения большего разрешения, а затем использовать результаты калибровки на изображениях меньшего размера!
Несмотря на простоту идеи, ее реализация потребовала серьезного копания в коде.Да, матрицы K и D широкоугольных камер не зависят от разрешения. Но почти во всех функциях калибровки и ректификации приходится передавать разрешение изображения, и простая замена его на нужное напрочь ломает результаты.
Наконец, мы выбрали не самый красивый, а понятный и управляемый способ обойти это. В процессе калибровки скрипты считают, что работают с разрешением 320х240. Но при поиске углов шахматной доски мы обманываем, а именно:
— для поиска координат углов мы подаем изображения с удвоенным разрешением.
— после нахождения координат углов уменьшаем все координаты X и Y вдвое.
— уменьшенные в 2 раза координаты передаются в обработку, и подмена проходит незамеченной.
На практике это позволяло не только без ошибок получать правильные угловые координаты, но и корректно находить углы на тех изображениях, где при меньшем разрешении углы вообще не находили.
После применения этой магии результаты нашей калибровки стали выглядеть так:
Что это значит? Это означает, что если вам нужна предельно точная калибровка, вы можете сделать снимки с разрешением, например, 4 Мпикс, откалибровать по ним, а затем использовать эти данные в более низких разрешениях.Конечно, эти высокие разрешения должны быть кратны вашему рабочему разрешению. Таким образом, для рабочего разрешения стереопары 640х240 можно откалибровать ее по картинкам в 1280х480 и 1920х720. Если у вас сенсор V1 (ov5647) с родным разрешением 2592х1944, то максимальное реальное разрешение для калибровки будет 2560х1920, что составляет 4,9 Мпикс.
Еще не время расслабляться, мы еще не закончили. Помните описание скрипта №2 и мой комментарий про нюансы, о которых никто не читает? Ну а если вы о них не читаете и не учитываете, то даже очень внимательное выполнение всех шагов в наших скриптах даст вам лишь посредственные результаты.Всякие приколы типа «приклейте шахматную доску на ровную поверхность», «пощедритесь на подсветку» и прочая ерунда, которая оказывается (вдруг!) неожиданным спасением после трех дней неудачных калибровок. Не буду повторять то, что уже отлично описано многими людьми, но приведу ссылку на одно из самых лаконичных и грамотных описаний этих нюансов на stackoverflow. Ознакомьтесь с первыми двумя ответами на этот вопрос на Stackoverflow. Полистайте, добавьте в закладки, а потом читайте, если больше ничего не помогает ☺
5.Установка параметров карты глубины: 5_dm_tune.py
Да, наконец-то мы закончили с длинным описанием скрипта №4. Вы, наверное, уже начали думать, что я решил вас потроллить. Но нет, там действительно было много важных моментов.
Но нет, там действительно было много важных моментов.
Пятый скрипт претерпел лишь минимальные изменения, в основном в том, как он исправляет изображение в соответствии с новым кодом для камер типа «рыбий глаз». Чтобы этот раздел был менее скучным, я выложу здесь короткое видео из нашей первой статьи, описывающее, как это работает:
6.Карта глубины с видео: 6_dm_video.py
Честно говоря, мы не планировали выкладывать этот скрипт в самую первую статью этой серии. Но потом мы подумали, что в преддверии следующих статей кому-то захочется поиграться с результатами, уже имеющимися для широкоугольных камер. В итоге мы просто адаптировали скрипт к обновленной логике, и теперь вы можете его использовать.
Если вы решите повторить все вышеперечисленные скрипты на своем StereoPi и дойдете до шестого, то результат вас немного озадачит.Код можно легко настроить так, чтобы результат был похож на наш стереопи-тутуриал. А те, кто решит не корректировать код, получат подсказку о том, в каком направлении мы будем двигаться дальше в продолжении нашей серии статей.
До встречи в наших следующих публикациях!
Репозиторий Github: стереопи-рыбий-робот
Наша вики живет здесь: wiki.stereopi.com
А форум здесь: forum.stereopi.com
P.S.
Да, а если запустить шестой скрипт, посмотреть на отображаемое время расчета карты глубины для каждого кадра, и перевести его в FPS.Мы оставляем выводы вам, дорогой читатель!
(PDF) Компактный робот-ассистент для малоинвазивной хирургии: KaLAR
несколько степеней. Повторяемость движения плохая
, так как мы управляем несколькими соединениями с помощью двух приводов.
Таким образом, управление этим многостепенным
гибочным участком с 2 парами проводов нецелесообразно. Однако этот результат
в некоторой степени предсказуем, так как этот тип недостаточно активированной системы
обычно дает нелинейность высокой величины.Чтобы
справиться с этой проблемой, мы добавили компенсационное значение к вводу желаемой позиции
.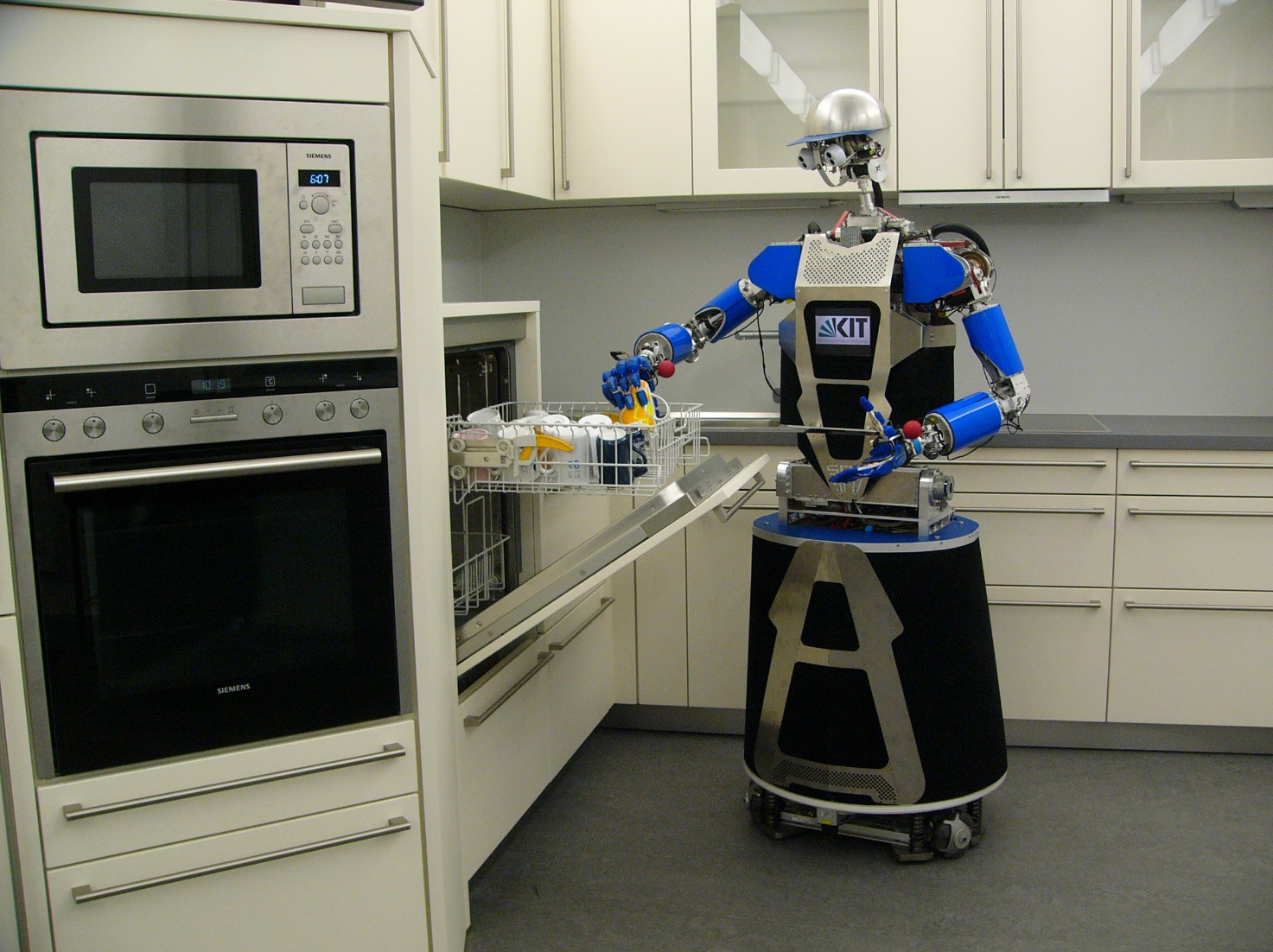 На рисунке 16 показана хорошая повторяемость
На рисунке 16 показана хорошая повторяемость
в одном направлении после применения компенсационного значения к каждой позиции
.
Просмотреть позицию
# Голос
Команда
Просмотреть позицию
# Голос
Команда
Рисунок 16. Повторяемость движения изгиба после компенсации
VI. D
ISCUSSION
Мы разработали компактный робот-ассистент для лапароскопии
с учетом безопасности и адаптивности.Чтобы
уменьшить вмешательство хирургов, KaLAR
разработан как компактная система с внутренними движениями.
На основании консультаций с хирургами и наблюдения за
несколькими лапароскопическими операциями определены необходимые параметры для
рабочего пространства. KaLAR имеет движения с 3 степенями свободы,
, которые включают 2 степени свободы для изгиба и 1 степень свободы для движения внутрь/наружу
. Для облегчения стерилизации и очистки KaLAR
оснащен функцией легкой сборки/разборки.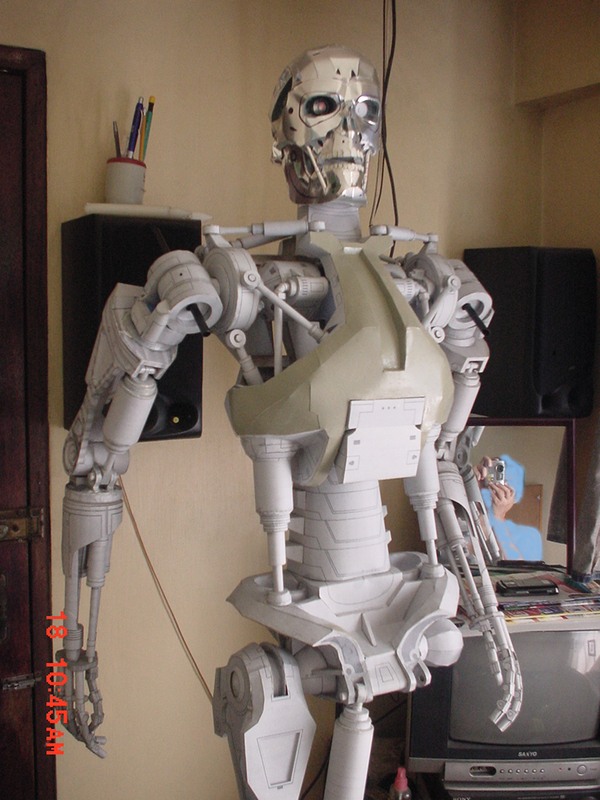
Эта роботизированная система уменьшила помехи для хирурга
, перемещаясь внутри брюшной полости. Для управления реализованы как
визуальное сервоуправление, так и голосовое управление
. Предварительные испытания показывают, что разработанная система
имеет потенциал для клинического использования после дальнейшего усовершенствования
.
VII. C
ONCLUSION
Мы разработали компактного робота-помощника камеры
с учетом безопасности и адаптивности.
Чтобы уменьшить помехи для хирургов, KaLAR разработан как компактная система
с внутренними движениями. На основании
консультаций с хирургами и наблюдения за несколькими
лапароскопическими процедурами определяются необходимые параметры для рабочего пространства
. KaLAR имеет движения с 3 степенями свободы, включая
2 степени свободы для изгиба и 1 степень свободы для движения внутрь/наружу. Чтобы облегчить стерилизацию и очистку (
), KaLAR оснащен
функцией легкой сборки/разборки. Эта роботизированная система
Эта роботизированная система
уменьшает вмешательство хирурга, перемещая
внутри брюшной полости. Для управления реализовано как визуально-следящее
, так и голосовое командное управление. Чтобы
определить общую производительность KaLAR, в том числе
эффективность слияния голосовых команд и визуального управления,
в настоящее время проводятся дополнительные эксперименты.
A
ПОДТВЕРЖДЕНИЕ
Авторы благодарят за помощь
Чон-Йан Янг и Кёбин Ли.
R
EFERENCES
[1] World Medical Device and Diagnostic News, 5 августа 1992 г.
[2] HA Zaren, «Взгляд хирургического онолога на минимально инвазивную хирургию», в Минимально неинвазивная хирургия желудочно-кишечного тракта
рак, (MA Cuest и AG Nagy, Editors), pp.1-6, Churchill
Liingstone, 1993.
роботизированная лапароскопия с активным зрением
», Proc.3-й семинар IEEE по применению компьютера
Vision, стр. 187-192, 1996.
187-192, 1996.
[4] PA Finlay, «Клинический опыт с гониометрической головкой —
, управляемый лапароскопический манипулятор», Труды семинара IARP
по медицинская робототехника, Вена, октябрь 1996 г.
[5] P. Berkelman, P. Cinquin, J. Troccaz, JM Ayoubi, C. Letoublon,
и F. Bouchard, «Компактный, совместимый лапароскопический эндоскоп
Манипулятор, Проц. конф.по робототехнике и автоматизации, стр.
1870-1875, 2002.
[6] Э. Кобаяши, К. Масамунэ, И. Сакамура, Т. Дохи и Д.
Хашимото, «Новая безопасная система лапароскопических манипуляторов». с пятизвенным рычажным механизмом
и оптическим увеличением», Computer
Aided Surgery, Vol. 4, № 4, с.Вильянуэва, Ф. Тендик, «Анализ рабочего пространства
роботизированных манипуляторов для дистанционной задачи наложения швов», Proc.
Конф. on Intelligent Robots and Systems, 2001.
[9] GQ Wei, L. Arbter, G. Hirzinger, «Визуальное обслуживание в реальном времени для
лапароскопической хирургии: управление движением робота с помощью сегментации цветного изображения
», IEEE Engineering in Медицина и биология, 1997,
том. 16, нет. 1, стр. 40~45.
16, нет. 1, стр. 40~45.
[10] М.И. Роб, П. Корбен, Р.Л. Рашворт, «Влияние новой технологии
на показатели холецистэктомии в Новом Южном Уэльсе», Журнал качества
в клинической практике, декабрь 1998 г., том.18, нет. 4, стр. 263-274.
[11] JG Maxwell, BA Tyler, R Rutledge, CC Brinker, BG Maxwell, DL
Covington, «Холецистэктомия у пациентов в возрасте 80 лет и старше»,
American Journal of Surgery, Dec 1998, vol. 176, нет. 6, стр. 627-
631.
Новый домашний робот Amazon Astro использует искусственный интеллект для автономной навигации с дисплеем и перископической камерой
Домашний робот Amazon Astro. (Фото Amazon)Компания Amazon представила домашнего робота Astro, который разрабатывался в течение последних нескольких лет и использует искусственный интеллект и другие передовые технологии для автономной работы дома.
С круглыми глазами на плоском дисплее Astro может кататься по дому, чтобы найти кого-нибудь, кто ответит на входящий вызов; используйте камеру перископа, чтобы убедиться, что плита выключена; обнаружить звук тревоги дыма или угарного газа; или найти кого-то, чтобы доставить напоминание.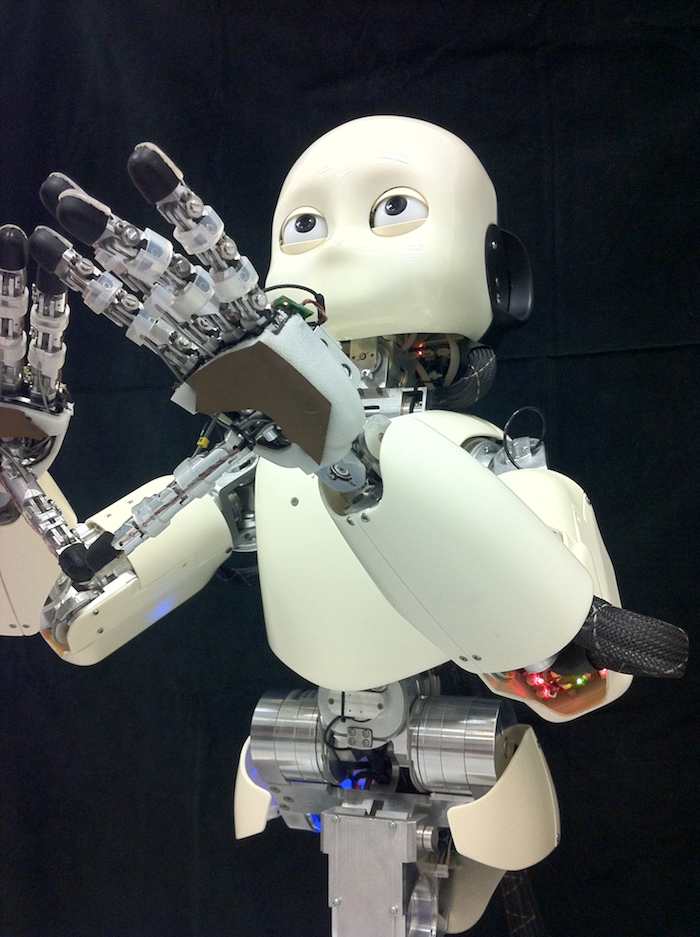
Вот некоторые из сценариев для Astro, которые Amazon описала, когда представила нового робота во вторник утром в рамках своего более крупного виртуального мероприятия Alexa и Echo.
Astro также может автономно патрулировать дом, когда людей нет, и «проактивно проводить расследование при обнаружении события», говорится в сообщении компании.
[Обновление : Vice Motherboard опубликовала подробности внутренних документов Amazon, описывающих, как эта функция работает в качестве устройства наблюдения, а также комментарии анонимных людей, которые работали над Astro, в которых говорилось, что технология в версиях, над которыми они работали, имеет недостатки.]
Эта функция работает со службой подписки Ring Protect Pro.По тематике он похож на автономный летающий беспилотник Ring Always Home Cam, который Amazon анонсировала год назад, но еще не выпустил.
«Оказывается, научиться летать — это довольно сложно», — сказал сегодня утром основатель Ring Джейми Симинофф на мероприятии Amazon. Сегодня Amazon открывает список приглашенных для Always Home Cam, но не назвал дату выхода.
Сегодня Amazon открывает список приглашенных для Always Home Cam, но не назвал дату выхода.
Робот Astro, который, как ожидается, будет продаваться по цене 1449,99 долларов США, будет доступен по начальной цене 999,99 долларов США в рамках программы Amazon Day 1 Editions, которая будет распространяться по приглашению, начиная с конца этого года, сообщает Amazon.Он будет поставляться с шестимесячной бесплатной подпиской Ring Protect Pro.
Amazon объявила о ряде мер защиты конфиденциальности, встроенных в робота Astro, включая возможность выключения микрофонов и камер нажатием кнопки, акцент на обработке на устройстве, когда это возможно, и четкие индикаторы того, что робот делает в любой момент.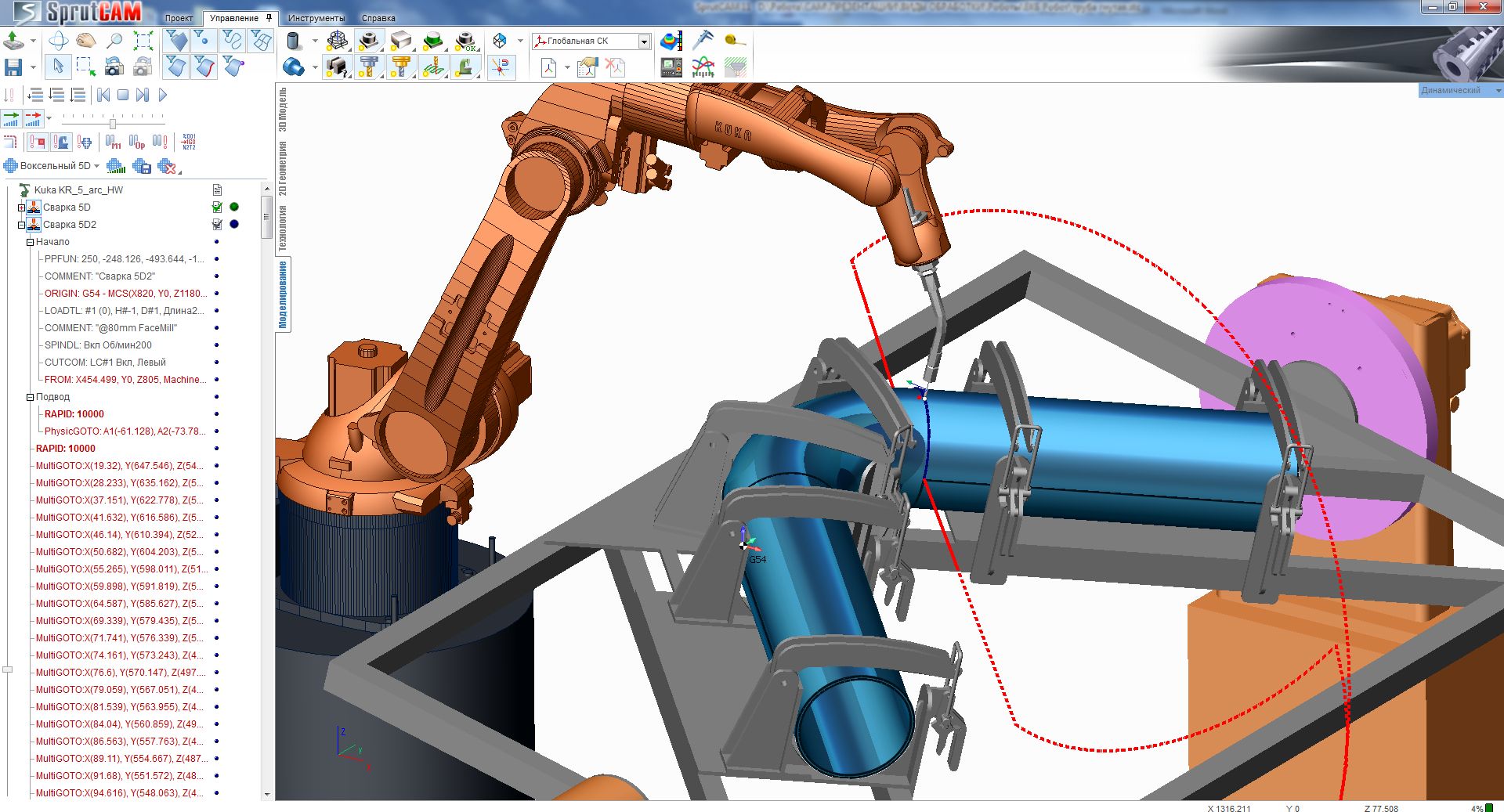 момент, включая светодиодный индикатор на перископе, который сигнализирует, когда он отправляет аудио или видео в облако.
момент, включая светодиодный индикатор на перископе, который сигнализирует, когда он отправляет аудио или видео в облако.
Вопросы конфиденциальности и безопасности были проблемой для Ring и Amazon, поскольку они выпускали новые продукты, включая вопросы об обработке Amazon голосовых записей Alexa и серию взломов камер Ring два года назад.
«В процессе разработки Astro провела сотни тысяч часов внутреннего тестирования с участием сотрудников Amazon — как в офисах, так и дома по всей стране», — пишет Чарли Тритчлер, вице-президент Amazon по продуктам. «За время работы с Astro я придумал много новых вещей, которые можно сделать, и я уверен, что у клиентов будет еще больше идей, о которых мы (пока) не думали».
Тепловизионная камера Обнаружение человека I Двухспектральная PTZ-камера слежения I Защита периметра AI
Охранный роботArgus — это профессиональное решение для обеспечения безопасности коммерческих и промышленных объектов.
Робот оснащен двухспектральной PTZ-камерой, расположенной на вершине мачты. Такое расположение поворотной камеры позволяет осуществлять круговое сканирование окружающей местности в тепловом и видимом спектрах. Тепловизионное видеонаблюдение обеспечивает надежное обнаружение людей и автомобилей в темное время суток при слабом искусственном освещении или его полном отсутствии.
Такое расположение поворотной камеры позволяет осуществлять круговое сканирование окружающей местности в тепловом и видимом спектрах. Тепловизионное видеонаблюдение обеспечивает надежное обнаружение людей и автомобилей в темное время суток при слабом искусственном освещении или его полном отсутствии.
Камера видимого спектра формирует изображение высокого разрешения, в ней используется новый датчик высокой светочувствительности. Видеоизображение как с тепловизионной камеры, так и с камеры видимого диапазона обрабатывается бортовым компьютером.Он обеспечивает управление PTZ-камерой, обнаружение человека и отслеживание.
360-градусное тепловизионное видеонаблюдение
Типовой режим работы интеллектуальной системы видеоанализа предполагает круговое вращение камеры до обнаружения человека. Далее включается режим слежения, и камера отслеживает человека до тех пор, пока не будет обнаружено его лицо во фронтальном положении.
Фотография человека спереди подходит для последующего распознавания. Если в течение 10 секунд изображение лица получить не удалось, камера продолжает круговое сканирование.
Если в течение 10 секунд изображение лица получить не удалось, камера продолжает круговое сканирование.
Надежность и высокая эффективность системы наблюдения достигаются тем, что человек определяется по изображению с камеры теплового спектра, а его изображение в виде, пригодном для распознавания оператором или системой распознавания лиц, поступает с зума модуль камеры высокого разрешения видимого спектра.
Для обеспечения безопасной работы робот оснащен шестью камерами для непрерывного кругового наблюдения на 360°. Камеры имеют высокую чувствительность и работают в режиме высокого разрешения.Изображение с этих камер анализируется отдельным бортовым компьютером панорамной системы видеонаблюдения для обнаружения людей. Это решение позволяет обнаружить приближающегося человека в момент, когда сканирующая поворотная камера не смотрит в его сторону.
Ночное патрулирование без наружного освещения
Как и все модели охранных роботов производства SMP Robotics. Новая модель Argus автоматически движется по заранее запрограммированному маршруту патрулирования, обходит препятствия и возвращается к зарядке при разрядке аккумуляторов.Робот-охранник заряжается автоматически с помощью автономной зарядной станции, входящей в комплект поставки. Конструкция охранного робота обеспечивает его надежное передвижение по неровной поверхности, покрытой щебнем или мелкими камнями.
Новая модель Argus автоматически движется по заранее запрограммированному маршруту патрулирования, обходит препятствия и возвращается к зарядке при разрядке аккумуляторов.Робот-охранник заряжается автоматически с помощью автономной зарядной станции, входящей в комплект поставки. Конструкция охранного робота обеспечивает его надежное передвижение по неровной поверхности, покрытой щебнем или мелкими камнями.
Что делает его идеальным для патрулирования периметра на территориях промышленных предприятий. Передача видео с робота, информации о его местоположении и работе систем осуществляется по беспроводным каналам связи 4G или WiFi.Видео с камер видеонаблюдения и тревожная информация доступны для отображения в любой стационарной VMS, поддерживающей протокол ONVIF. Статус и местонахождение роботов на маршрутах патрулирования отображаются в веб-сервисе группового мониторинга работы роботов.
.