
Основы кинематики – презентация онлайн
Похожие презентации:
Механическое движение
Кинематика. (Лекция 1)
Основы кинематики
Кинематика материальной точки. (Тема 1)
Физические основы механики. Элементы кинематики
Повторение: основные понятия и уравнения кинематики
Кинематика. Готовимся к ЕГЭ
Траектория, путь и перемещение. Скалярные и векторные величины
Физические основы механики. Элементы кинематики
Основные понятия и уравнения кинематики
1. ОСНОВЫ КИНЕМАТИКИ (10 час)
1.МЕХАНИКАТУРЗ 1 (1)
срок сдачи:
18 22 28 (РПД) – 3
61 64 69 72 73 74 77 78 79 80 83 85 (РУД) – 12
88 89 489 (ПД) – 3
157 166 (СП) – 2
«5» -20 – 18
«4» – 17 – 14
«3» – 13 – 10
3. МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ
Урок 1/1Введение,§1-6
ОК-1
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ
ОСНОВЫ КИНЕМАТИКИ
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ- процесс изменения положения тела в
пространстве относительно других тел с течением времени.

различно в различных СО
без выбора СО не имеет смысла
СИСТЕМА ОТСЧЕТА (СО) – совокупность системы координат (СК),
связанной с телом отсчета (О) и покоящихся относительно него часов.
ТЕЛО ОТСЧЕТА (О) – Т. тело, относительно которого
определяется положение других тел.
СИСТЕМА КООРДИНАТ (СК) –
одно- (х) – «трамвай» дву- (х, у) – «лодка» трех- (х, у, z) – «муха»
ЧАСЫ – прибор для измерения времени.
МАТЕРИАЛЬНАЯ ТОЧКА – модель, соответствующая телу, размерами
которого можно пренебречь в данных условиях;
размеры тела (d) << расстояние до тела (r)
ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ – движение, при котором все точки
тела движутся одинаково.
ОСНОВНАЯ ЗАДАЧА МЕХАНИКИ (ОЗМ) – определить положение тела в
любой момент времени.
ТРАЕКТОРИЯ – линия, вдоль которой движется тело в данной СО
(прямая, кривая).
ЗАКОН (УРАВНЕНИЕ) ДВИЖЕНИЯ – уравнение, выражающее зависимость
величин, характеризующих движение, от времени:: х = х (t)
ПЕРЕМЕЩЕНИЕ (S) – вектор,
соединяющий начальное и
конечное положение
материальной точки
[S] = 1м | S | > 0
ВСЕГДА!
S
l
ПРОЙДЕННЫЙ ПУТЬ (l) –СФВ,
длина участка траектории,
пройденного материальной
точкой за данный
промежуток времени.
[l] =1м
l = |S| = |X2 – X1| – только
для прямолинейного
движения
| S | = S – модуль вектора перемещения
Sx – проекция вектора перемещения на ось Ох.
ОЗМ для любого вида движения:
X = X0 + S X
SX = X-X0 ,
где х – координата в любой момент времени,
x0 – начальная координата.
•ПРОЕКЦИИ ВЕКТОРА НА ОСИ КООРДИНАТ
ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ – отрезок, соединяющий
проекцию начала вектора и проекцию его конца
Проекция вектора – скалярная величина
Sх- проекция вектора перемещения на ось Ох
проекция конца
проекция начала
проекция начала
а
ах
0
в
вх
проекция конца
Х
•ЗНАКИ ПРОЕКЦИЙ
• Проекция вектора положительна, если
от проекции начала вектора к проекции
его конца надо двигаться по
направлению оси
• Проекция вектора отрицательна, если
от проекции начала вектора к проекции
его конца надо двигаться в направлении,
противоположном направлению оси
• Проекция вектора равна нулю,
если вектор перпендикулярен
оси координат
с
в
а
a х> 0
с х= 0 в х< 0 х
ОЗМ для любого вида движения:
Связь проекции вектора перемещения и координаты тела
sx = х – х0 sy = y – y0
формулы для расчета
координат тела в любой
момент времени
х = х0 + sx
y = y0 + sy
у
у
Sу
S
у0
Sх
х0
S
=?
х
х
10.
 НАЙТИ ПРОЕКЦИИ ВЕКТОРА ПЕРЕМЕЩЕНИЙY4
НАЙТИ ПРОЕКЦИИ ВЕКТОРА ПЕРЕМЕЩЕНИЙY41
0
-4
1
2 3 4 5 6 7 8
Х
11. НАЙТИ ПРОЕКЦИИ ВЕКТОРОВ ПЕРЕМЕЩЕНИЯ
НАЙТИY
s1
5
4
3
2
S4
s2
1
0
ПРОЕКЦИИ ВЕКТОРОВ ПЕРЕМЕЩЕНИЯ
1
s3
2 3 4 5 6 7 8
Х
English Русский Правила
Конспект урока по физике по теме “Основы кинематики”
Цели: образовательная: повторение пройденного материала; проверка усвоения основных идей кинематики и полученных ребятами умений и навыков в решении задач, чтении графиков скорости; подготовка к ГИА.
развивающая: развитие умений применять имеющиеся знания; развитие способностей анализировать, делать выводы; логически рассуждать, а в конечном итоге – развитие интеллекта и творческих способностей; развитие внимания, памяти.
воспитательная: формирования познавательного
интереса к физике; убеждение учащихся в существовании закономерностей в
природных явлениях; формирование уважения к научному познанию и убеждения в
ценности научных знаний для разных областей человеческой деятельности, для
повседневной жизни человека; приучение к самостоятельной работе; умение слушать
своих товарищей.
Тип урока: повторительно-обобщающее учебное занятие.
I. Орг. момент
Приветствие учителя, проверка подготовленности учащихся к учебному занятию, раскрытие учителем общих целей учебного занятия
Учитель: Изучение механики и в наши дни имеет большое научное и практическое значение. На законах классической механики основано применение транспортных машин, различного рода механизмов, строительство зданий, мостов, плотин, запуск и движение космических кораблей и спутников. Во всех таких случаях важно уметь рассчитывать движение тел так, чтобы они достигали намеченной цели в заданный момент времени; уметь предсказывать их положение в пространстве в каждый момент времени. Поэтому одной из основных задач механики является определение положения тела в любой момент времени.
Изучение механики начинается с раздела “Кинематика” .
II. Повторение
Повторение основных понятий Кинематики
Вопросы:
· Что изучает кинематика?
Ответ:
Описание движения, устанавливает связь между величинами, характеризующими
движение, с помощью формул и графиков.
· Что такое механическое движение?
Ответ: С понятием механического движения мы встречались в 7 классе, где было подчеркнуто, что всякое изменение положения тела совершается в пространстве и определяется относительно других тел. В 9 классе мы добавляем то, что это изменение происходит с течением времени.
· Что такое материальная точка?
Ответ: Понятие материальной точки условное и применяется для упрощения задачи изучения движения тел или частиц. Акцентируем внимание на двух случаях: а) когда размеры тела малы по сравнению с проходимым телом расстоянием и б) когда размеры тела много меньше расстояния от данного тела до другого тела. Тело, размерами которого в данных условиях можно пренебречь, называют материальной точкой.
· Что такое система отсчета?
Ответ:
Тело отсчета, система координат, связанная с ним, и прибор для измерения
времени образуют систему отсчета. О состоянии движения тела мы можем говорить
определенно, только указав систему отсчета.
· Чем отличается перемещение от пройденного пути?
Ответ: Вводится новое понятие – перемещение. Направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением. Путь, пройденный точкой, равен длине траектории. Путь – скалярная величина, а перемещение – векторная. Траектория-линия движения.
· Какие системы координат вы знаете?
Ответ: Одномерные, двумерные, трехмерные.
· Может ли координата быть отрицательной величиной?
Ответ: Да. Проведем вдоль дороги ось координат ОХ с началом отсчета в точке О. Координаты, отсчитываемые вправо от О, будем считать положительными, а влево – отрицательными.
· В чем состоит относительность движения?
Ответ: Положение тела в пространстве всегда задается относительно какого – то другого тела – тела отсчета. С этим телом связывают систему координат, и положение тела задается его координатами.
· Какие виды движения по форме траектории вы знаете?
Ответ: Прямолинейное и криволинейное
· Какие виды движения по скорости вы знаете?
Ответ равномерное и равноускореное
· Как рассчитать величины при прямолинейном равноускоренном движении?
(Поднимается
экран и таблица слайда №2 проецируется на
доску – ребята по очереди мелом заполняют ее. )
)
Применим
вместе эти формул для случая равномерного прямолинейного движения.
– Что
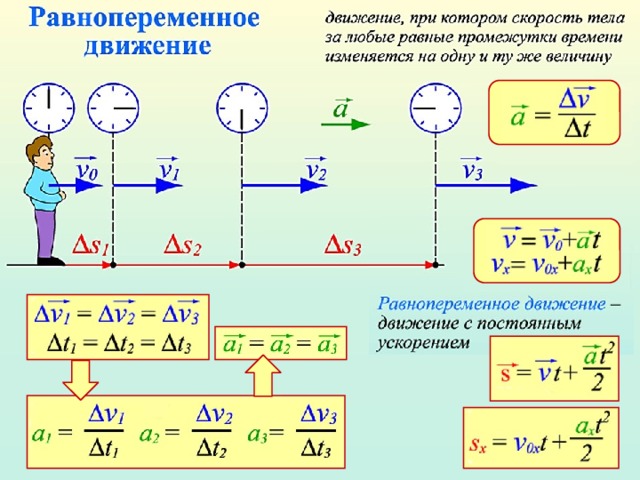
вы можете сказать о равномерном движении? (Это движение, при котором тела за
любые равные промежутки времени совершают одинаковые перемещения)
– Хорошо, что вы еще можете сказать? (V = const)
– А когда скорость постоянна? (а = 0) Запишите себе в тетрадь, как будут
выглядеть основные формулы кинематики для р.п.д., учтите, пожалуйста, все то,
что они сказали об этом движении.
– Запишите в тетради, как будут выглядеть основные формулы кинематики для равноускоренного движения с V0 = 0.
–
И у нас осталась последняя таблица. Скажите, пожалуйста, а как будет выглядеть
О.Ф.К. для равнозамедленного движения?
То же, только знак «минус» перед ускорением.
Мы получили три частных случая из основных формул кинематики, теперь нам под
силу любая задача.
· В каком случае положение движущегося тела можно задать с помощью одной координаты?
· Геометрический смысл перемещения (площадь, ограниченная графиком скорости тела)
Повторение основных формул
На экране слайд,
на котором выписаны формулы и выражения. Одному учащемуся предлагается идти к
доске, все остальные работают на месте. Задание: разделить формулы на три
группы прямолинейное равномерное движение и равноускоренное движение.
Одному учащемуся предлагается идти к
доске, все остальные работают на месте. Задание: разделить формулы на три
группы прямолинейное равномерное движение и равноускоренное движение.
Содержание карточек:
1) V = 5 + 6t
2) V = 8t
3) X = 4 + 10t
4) S = 1.5 t2
6) S = 2t + 0.5t2
Правильные ответы:
Прямолинейное равномерное движение | Равноускоренное движение V0 =0 | Равноускоренное движение V0 ≠ 0 |
3 | 2. 4 | 1. 5. 6 |
Работа с графическими заданиями.
разделить
графики на три группы прямолинейное равномерное движение и равноускоренное
движение.
Правильные ответы:
Прямолинейное равномерное движение | Равноускоренное движение V0 =0 | Равноускоренное движение V0 ≠ 0 |
3 | 4 | 1. 2. 5 |
По 1 графику изменения скорости заполните необходимые данные:
1. Какова начальная скорость? (60)_
2. Чему станет равна скорость тела через 3с? (0)
3. С каким ускорением движется тело? (20)
4. составьте уравнение
зависимости скорости от времени
составьте уравнение
зависимости скорости от времени
v=60-20t
5. Какой путь пройдет тело за 3с? (90)
Самопроверка
Самостоятельная работа
1. Какова начальная скорость?
2. Чему станет равна скорость тела через 4с?
3. С каким ускорением движется тело?
4. составьте уравнение зависимости скорости от времени
5. Какой путь пройдет тело за 4с?
1 ряд график № 5 (40, 80, 10, v=40+10t, 240)
2 ряд график № 4 (0, 60, 15, v=15t, 120)
Физкультминутка.
хочу убедиться в том, что ваши знания,
прочные. Для этого ответьте на вопросы: «да» -поднимаем руки вверх или «нет»-
приседаем.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Скорость – векторная величина.
2. Перемещение – длина траектории движения точки.
3. Движение, при котором тело движется так, что его траектория – прямая линия, называют равномерным.
4. Яблоко, лежащее на столике вагона движущегося поезда, перемещается относительно пассажира, идущего по вагону.
5. Ускорение показывает быстроту изменения скорости тела в единицу времени.
6. По графику скорости определить пройденный путь нельзя
7. Единицы измерения скорости – [м/с2 ].
Эстафета. Каждому ряду парт дается листок с заданиями (2 варианта по 5 заданий).
Каждый, выполнив свое задание, передает листок вместе с ответом второму. Тот в
свою очередь вместо пропущенного значения ставит этот ответ и решает свою
задачу и т.д. Решив свою задачу, каждый выходит к доске и записывает формулу,
по которой велось решение, и ответ. Чей ряд быстро и правильно справится с
заданием, тому – поощрение. (Поднимается экран и таблица слайда № 7
проецируется на доску – ребята мелом заполняют ее.) (Остальные в это время –
работа с тестом д/м ТС-2 Стр 28)
Чей ряд быстро и правильно справится с
заданием, тому – поощрение. (Поднимается экран и таблица слайда № 7
проецируется на доску – ребята мелом заполняют ее.) (Остальные в это время –
работа с тестом д/м ТС-2 Стр 28)
Задания к эстафете
Ряд 1.
1) Тело за 25с от начала движения прошло путь 2,5км. С каким ускорением двигалось тело? (8 м/с2)
2) Тело, двигаясь с ускорением…, увеличило свою скорость с 18 км/ч до 54 км/ч. Какой путь оно прошло за это время? (12,5 м)
3) Тело начало тормозить и, пройдя… метров, остановилось через 5с. С каким ускорением двигалось тело?(1 м/с2)
4) Тело, имея начальную скорость 20 м/с, тормозит с ускорением…. Через какой промежуток времени оно остановится? (20 с)
5) Тело, двигаясь с ускорением 0,5 м/с2, за…секунд прошло путь 180м. Какова была его начальная скорость? (4 м/с)
Ряд 2.
1) Автомобиль
на пути 600м увеличил свою скорость с 18 км/ч до 90 км/ч. С каким ускорением он
двигался? (0,5 м/с2)
С каким ускорением он
двигался? (0,5 м/с2)
2) Автомобиль, имея начальную скорость 36 км/ч, двигался с ускорением … в течение 10с. Какой путь прошел он за это время? 125м
3) Автомобиль, трогаясь с места, за 25с прошел путь…. С каким ускорением двигался автомобиль? 0,4
4) Автомобиль, имея начальную скорость 72 км/ч, двигался с ускорением …. Через какой промежуток времени он достигнет скорости 24 м/с? 10 с
5) Автомобиль, имея начальную скорость 54 км/ч, начал тормозить и через … секунд остановился. С каким ускорением двигалось тело? 1,5м/с2
Домашнее задание. Повторить §1-10 д/м ТС-1
Учащимся предлагается заполнить итоговую обобщающую таблицу. Её форма появляется на доске и переносится в тетради учащихся. l
Вид движения | скорость | ускорение | перемещение | График скорости | График ускорения |
равномерное |
|
|
|
|
|
равноускоренное |
|
|
|
|
|
Итог
урока.
Рефлексия.
Итак, сегодня на уроке мы с вами классифицировали механическое движение по его скорости.
Вопросы учителя: | Предполагаемые ответы детей: |
О каких видах движения мы говорили? | О равномерном прямолинейном и равноускоренном. |
В чем их принципиальное отличие? | При равномерном движении скорость тела не меняется со временем. При равноускоренном движении скорость тела изменяется на постоянную величину – ускорение. |
Как вы думаете, какой вид движения из рассмотренных нами, встречается в жизни чаще? | Равноускоренное,
т.к. тела вынуждены часто менять скорость в результате торможения или
наоборот при увеличении скорости. |
Можно ли считать равномерное движение частным случаем равноускоренного? | Да, если а=0. |

Знаю | Узнал | Хочу узнать |
|
|
|
Кинематические основания/кинематическая опорная плита
- в наличии
- 2 недели
- 2-3 недели
- 6-12 недель
Включенные фильтры:
Удалить все фильтры
| Имя | Доставка | Цена | В корзину | |||
|---|---|---|---|---|---|---|
я Магнитная кинематическая база 40 мм дюймРЭП-40УУ | 6-12 недель | 48,45 $ |
| |||
я Магнитная кинематическая верхняя пластина 65 мм, дюймРЭП-65ПУУ | в наличии | 30,60 $ |
| |||
я Магнитная кинематическая верхняя пластина 25 мм, метрическая системаРЭП-25П | 2 недели | 22,95 $ |
| |||
я Магнитная кинематическая верхняя пластина 60 мм, метрическая системаРЭП-60П | 6-12 недель | 33,15 $ |
| |||
я Фиксированная кинематическая база 70 мм, метрическая системаРЭП-70 | 2 недели | 81,60 $ |
| |||
я Магнитная кинематическая база 25 мм, метрическаяРЭП-25 | 6-12 недель | 45,90 $ |
| |||
я Магнитная кинематическая база 60 мм, метрическаяРЭП-60 | 2 недели | 61,20 $ |
| |||
я Фиксированная кинематическая верхняя пластина 70 мм, метрическая системаРЭП-70П | 2 недели | 40,80 $ |
| |||
я Магнитная кинематическая верхняя пластина 40 мм, метрическая системаРЭП-40П | 2 недели | 25,50 $ |
| |||
я Магнитная кинематическая база 65 мм, метрическаяРЭП-65ЭЭ | в наличии | 66,30 $ |
| |||
я Фиксированная кинематическая база 100 мм, метрическая системаРЭП-100 | 2 недели | 86,70 $ |
| |||
я Магнитная кинематическая база 40 мм, метрическаяРЭП-40 | 2 недели | 48,45 $ |
| |||
я Магнитная кинематическая верхняя пластина 65 мм, метрическая системаРЭП-65ПЭЭ | в наличии | 30,60 $ |
| |||
я Фиксированная кинематическая верхняя пластина 100 мм, метрическая системаРЭП-100П | 2 недели | 45,90 $ |
| |||
я Магнитная кинематическая верхняя пластина 40 мм, дюймРЭП-40ПУУ | 6-12 недель | 25,50 $ |
| |||
я Магнитная кинематическая база 65 мм дюймРЭП-65УУ | в наличии | 66,30 $ |
|
 45″ data-id=”839″>
45″ data-id=”839″> 6″ data-id=”845″>
6″ data-id=”845″>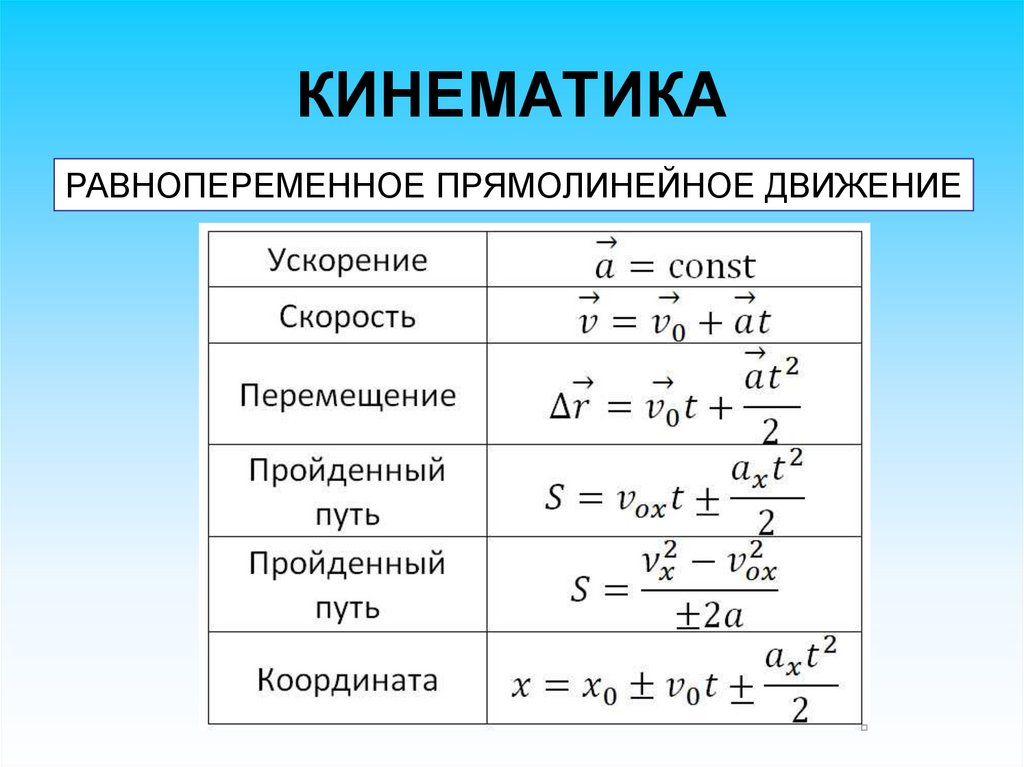 95″ data-id=”851″>
95″ data-id=”851″> 15″ data-id=”857″>
15″ data-id=”857″> 6″ data-id=”863″>
6″ data-id=”863″>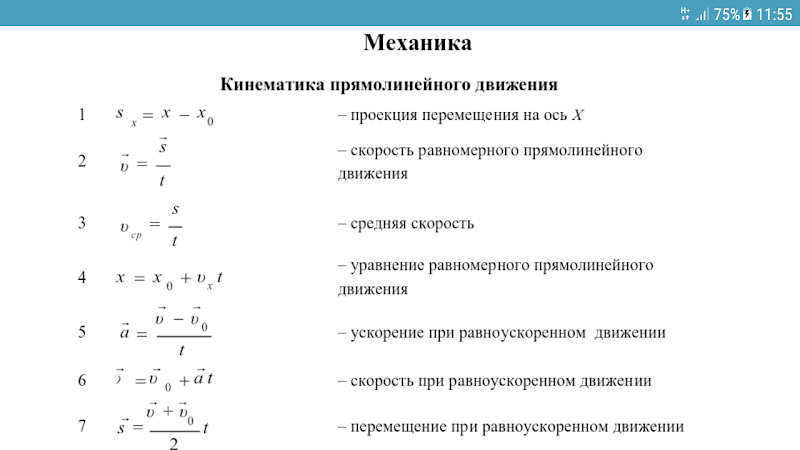 9″ data-id=”835″>
9″ data-id=”835″>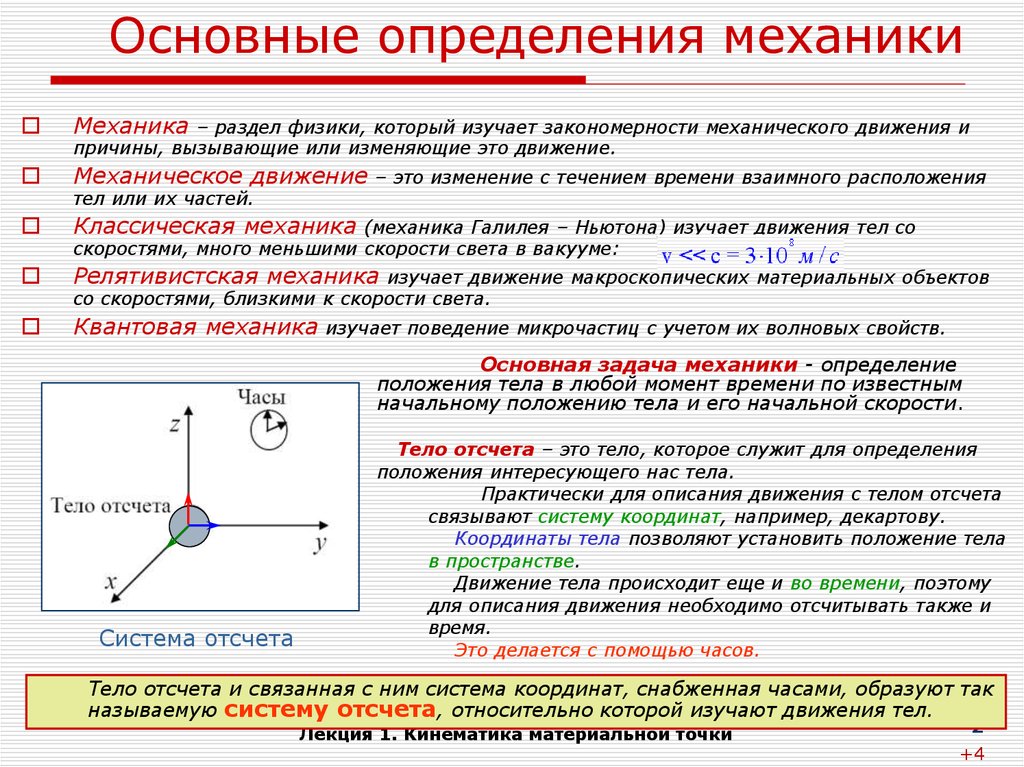 2″ data-id=”841″>
2″ data-id=”841″> 8″ data-id=”847″>
8″ data-id=”847″> 5″ data-id=”853″>
5″ data-id=”853″>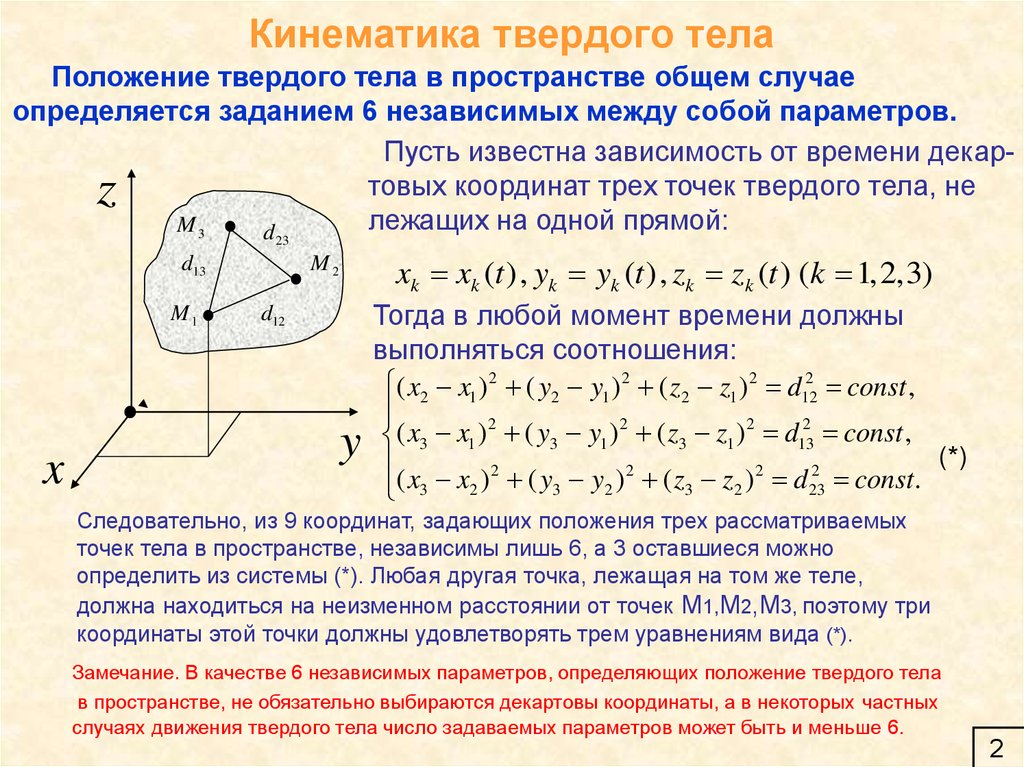 3″ data-id=”859″>
3″ data-id=”859″> 7″ data-id=”865″>
7″ data-id=”865″> 45″ data-id=”837″>
45″ data-id=”837″> 6″ data-id=”843″>
6″ data-id=”843″> 9″ data-id=”849″>
9″ data-id=”849″>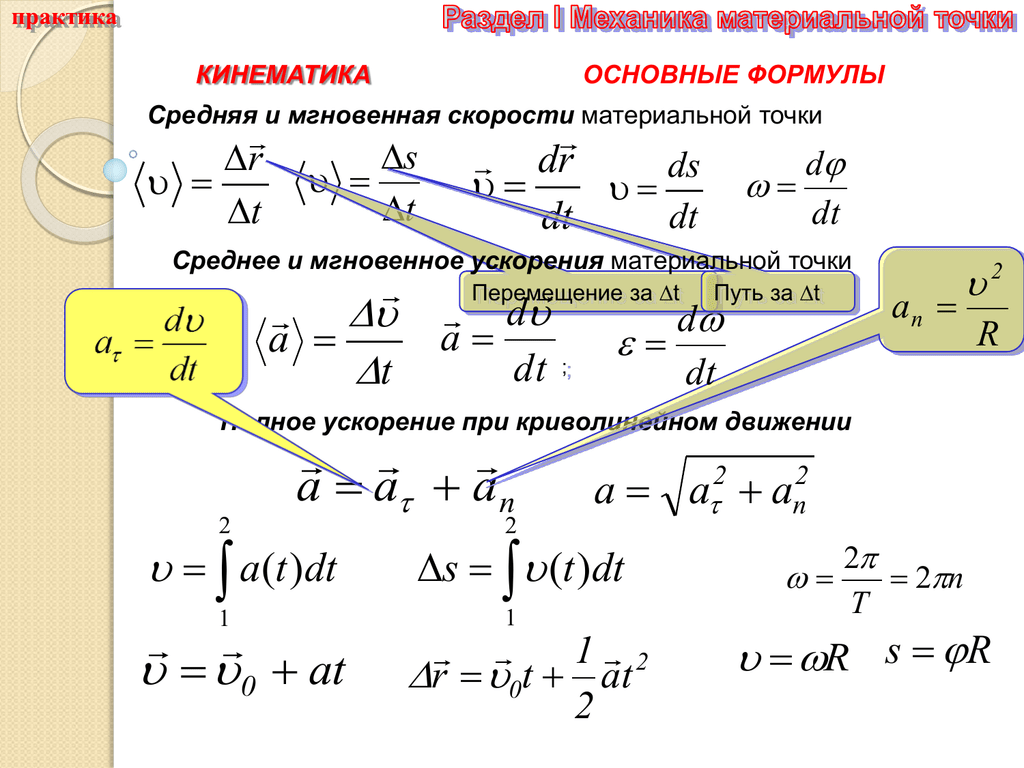 5″ data-id=”855″>
5″ data-id=”855″>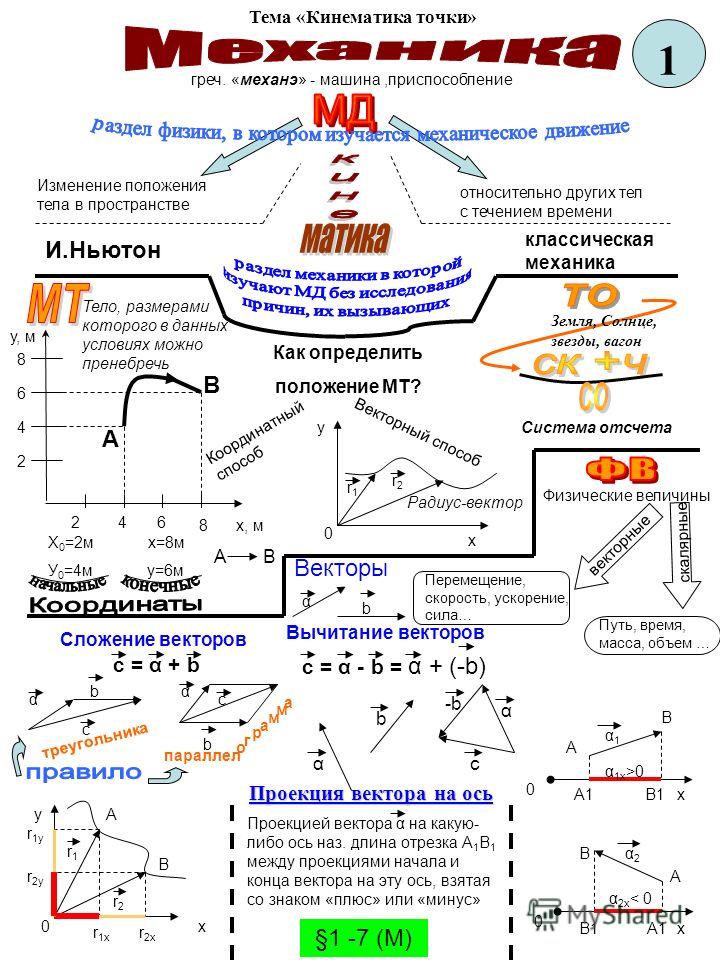 3″ data-id=”861″>
3″ data-id=”861″>Вы должны войти в систему, чтобы задать вопросы
◦Точная повторяемость положения достигается за счет совпадения отверстий на верхней пластине с тремя стальными шариками, встроенными в нижнюю пластину.
◦В зависимости от версии верхнюю пластину можно закрепить с помощью сильного магнита или установочного винта с накатанной головкой.
◦Верхнюю пластину серии РЭП магнитного типа (25×25 мм, 40×40 мм, 60×60 мм) можно быстро снять или заменить. Он имеет значение повторяемости менее 100 мкрад.
◦Всегда закрепляйте нижнюю пластину винтами.
Глава 4. Основы кинематики твердых тел со связями
с
Сьюзен Фингер
Стефанни Беренс
Содержание
4.1 Степени свободы твердого тела
4.1.1 Степени свободы твердого тела на плоскости
Определены степеней свободы (степень свободы) твердого тела
как количество независимых движений, которые он имеет. Рисунок 4-1
изображено твердое тело на плоскости. Определить степень свободы этого тела
мы должны рассмотреть, сколькими различными способами можно перемещать планку. В
двумерная плоскость, такая как этот экран компьютера, есть 3 степени свободы. Бар может быть переведен на по оси x , в переводе
вдоль оси 90 490 и 90 491, а 90 490 повернулся на 90 491 вокруг своего центра тяжести.
Бар может быть переведен на по оси x , в переводе
вдоль оси 90 490 и 90 491, а 90 490 повернулся на 90 491 вокруг своего центра тяжести.
Рисунок 4-1 Степени свободы твердого тела на плоскости
4.1.2 Степени свободы твердого тела в пространстве
Незакрепленное твердое тело в космосе имеет шесть степеней свободы: три поступательных движения вдоль x , y и z осей и три вращательных движения вокруг x , и и оси и соответственно.
Рисунок 4-2 Степени свободы твердого тела в пространстве
4.2 Кинематические ограничения
Два или более твердых тела в космосе вместе называются твердыми телами .
система кузова . Мы можем воспрепятствовать движению этих независимых жестких
тела с кинематическими связями . Кинематическая
ограничения — это ограничения между твердыми телами, которые приводят к
уменьшение степеней свободы системы твердых тел.
Термин «кинематическая пара» на самом деле относится к кинематические связи между твердыми телами. Кинематические пары делятся на младшие пары и высшие пары, в зависимости от того, как тела соприкасаются.
4.2.1 Нижние пары в планарных механизмах
В планарных механизмах есть два типа нижних пар: вращательные пары и призматические пары.
Твердое тело на плоскости совершает только три независимых движения — два поступательный и один вращательный – поэтому введение либо вращательной пары или призматическая пара между двумя твердыми телами удаляет две степени свобода.
Рисунок 4-3 Плоская вращающаяся пара (R-пара)
Рисунок 4-4 Плоская призматическая пара (P-пара)
4.2.2 Нижние пары в пространственных механизмах
Есть шесть видов нижних пар в категории пространственных механизмов. Типы: сферическая пара, плоская пара,
цилиндрическая пара, вращающаяся
пара, призматическая пара и винтовая пара.
Рисунок 4-5 Сферическая пара (S-пара)
Сферическая пара удерживает вместе два сферических центра. Два твердые тела, связанные этой связью, смогут повернуть относительно осей x , y и z , но не будет относительного перевода по любому из этих оси. Следовательно, сферическая пара лишает три степени свободы в пространственный механизм. степеней свободы = 3 .
Рисунок 4-6 Плоская пара (E-пара)
Пара плоскостей удерживает вместе поверхности двух твердых тел.
Чтобы визуализировать это, представьте книгу, лежащую на столе, где она может двигаться.
в любом направлении, кроме как от стола. Два твердых тела, соединенных
такая пара будет иметь два независимых поступательных движения в
плоскость и вращательное движение вокруг оси, перпендикулярной
к самолету. Следовательно, плоская пара удаляет три степени
свобода пространственного механизма. В нашем примере книги не будет. в состоянии подняться со стола или повернуться в стол. ГРИП =
3.
в состоянии подняться со стола или повернуться в стол. ГРИП =
3.
Рисунок 4-7 Цилиндрическая пара (C-пара)
Цилиндрическая пара удерживает две оси двух твердых тел. выровнены. Два твердых тела, являющиеся частью такой системы, будут имеют независимое поступательное движение вдоль оси и относительное вращательное движение вокруг оси. Следовательно, цилиндрическая пара удаляет четыре степени свободы от пространственного механизма. ГРИП = 2.
Рисунок 4-8 Вращающаяся пара (R-пара)
Вращающаяся пара удерживает оси двух твердых тел. вместе. Два твердых тела, скрепленные вращательной парой, имеют независимое вращательное движение вокруг общей оси. Следовательно, вращающаяся пара убирает пять степеней свободы в пространственном механизм. ГРИП = 1.
Рисунок 4-9 Призматическая пара (P-пара)
Призматическая пара удерживает две оси двух твердых тел на одной линии и
не допускать относительного вращения. Два твердых тела, ограниченные этим видом
связи сможет иметь независимое поступательное движение
вдоль оси. Следовательно, призматическая пара удаляет пять степеней
свобода пространственного механизма. ГРИП = 1.
Два твердых тела, ограниченные этим видом
связи сможет иметь независимое поступательное движение
вдоль оси. Следовательно, призматическая пара удаляет пять степеней
свобода пространственного механизма. ГРИП = 1.
Рисунок 4-10 Винтовая пара (H-пара)
Пара винтов удерживает две оси двух твердых тел на одной линии и допускает относительное винтовое движение. Два твердых тела, ограниченные винтовая пара движение, составляющее поступательное движение вдоль оси и соответствующее вращательное движение вокруг оси. Следовательно, винтовая пара убирает пять степеней свободы в пространстве. механизм.
4.3 Закрепленные твердые тела
Твердые тела и кинематические связи являются основными компонентами
механизмы. Ограниченная система твердых тел может быть кинематической цепью, механизмом, конструкцией или ничем из этого.
Влияние кинематических связей на движение твердых тел
имеет два внутренних аспекта: геометрический и физический. аспекты. Другими словами, мы можем анализировать движение ограниченного
твердые тела из их геометрических взаимосвязей или с помощью второго закона Ньютона.
аспекты. Другими словами, мы можем анализировать движение ограниченного
твердые тела из их геометрических взаимосвязей или с помощью второго закона Ньютона.
Механизм – это система твердых тел со связями, в которой один из тела является каркасом. Степени свободы важны при рассмотрении системы жесткого тела с ограничениями это механизм. Это менее важно, когда система представляет собой структуры или когда она не имеет определенного движения.
Вычисление степеней свободы системы твердых тел происходит прямо вперед. Любое неограниченное твердое тело имеет шесть степеней свободы. пространство и три степени свободы на плоскости. Добавление кинематики связи между твердыми телами соответственно уменьшат Степени свободы системы твердых тел. Мы обсудим больше на эта тема для планарных механизмов в следующем разделе.
4.4 Степени свободы планарных механизмов
4.4.1 Уравнение Грюблера
Определение степеней свободы механизма
– количество независимых относительных движений между твердыми телами. Например, на рис. 4-11 показаны несколько случаев
твердое тело, ограниченное разного рода парами.
Например, на рис. 4-11 показаны несколько случаев
твердое тело, ограниченное разного рода парами.
Рисунок 4-11 Твердые тела, ограниченные различными типами плоских пар
На рис. 4-11а твердое тело ограничено вращательной парой, которая допускает только вращательное движение. движение вокруг оси. Имеет одну степень свободы, поворачивается точка А. Две потерянные степени свободы — это поступательные движения вдоль 9Оси 0490 x и y . Единственный способ, которым твердое тело может перемещение — это вращение вокруг фиксированной точки A.
На рис. 4-11b твердое тело ограничено призматической парой, которая позволяет только поступательное движение. В двух измерениях он имеет одну степень свобода, перемещаясь по оси x . В этом примере тело утратило способность вращаться вокруг какой-либо оси, и оно не может двигаться вдоль оси y .
На рис. 4-11c твердое тело ограничено высшей парой. Имеет две степени
свобода: перемещение по криволинейной поверхности и поворот вокруг
мгновенная точка контакта.
В общем случае твердое тело на плоскости имеет три степени свободы. Кинематические пары — это ограничения на твердые тела, которые уменьшают степени свободы механизма. На рис. 4-11 показаны три вида пар в планарных механизмах. Эти пары уменьшают количество степеней свободы. Если мы создадим нижнюю пару (рис. 4-11а,б), количество степеней свободы уменьшается до 2. Аналогично, если мы создадим высшую пару (рис. 4-11в), количество степеней свободы уменьшено до 1.
Рисунок 4-12 Кинематические пары в планарных механизмах
Следовательно, мы можем написать следующее уравнение:
Где
- F = общее количество степеней свободы в механизме
- n = количество ссылок (включая рама)
- l = количество нижних пар (одна степень свободы)
- ч = количество старших пар (две степени свободы)
- n = количество ссылок (включая рама)
Это уравнение также известно как уравнение Грюблера 9.0492 .
Пример 1
Посмотрите на фрамугу над дверью на рис. 4-13а. Открытие и
закрывающий механизм показан на рис. 4-13b. Давайте посчитаем его
степень свободы.
4-13а. Открытие и
закрывающий механизм показан на рис. 4-13b. Давайте посчитаем его
степень свободы.
Рисунок 4-13 Механизм транца
n = 4 (звено 1,3,3 и кадр 4), l = 4 (в точках A, B, C, D), h = 0
Примечание: D и E функционируют как одна призматическая пара, поэтому они только считаются одной нижней парой.
Пример 2
Рассчитайте степени свободы механизмов, показанных на рис. 4-14b. Рисунок 4-14a представляет собой приложение механизма.
Рисунок 4-14 Самосвал
n = 4, l = 4 (в точках A, B, C, D), h = 0
Пример 3
Рассчитайте степени свободы механизмов, показанных на рис. 4-15.
Рисунок 4-15 Расчет степеней свободы
Для механизма на рис. 4-15а
п = 6, л = 7, ч = 0
Для механизма на рис. 4-15b
п = 4, л = 3, ч = 2
Примечание: Вращение ролика не влияет на
взаимосвязь входного и выходного движения механизма. Следовательно,
свобода валика учитываться не будет; Это называется пассивный или резервный степень свободы.
Представьте, что ролик приварен к звену 2 при подсчете градусов
свободы механизма.
Следовательно,
свобода валика учитываться не будет; Это называется пассивный или резервный степень свободы.
Представьте, что ролик приварен к звену 2 при подсчете градусов
свободы механизма.
4.4.2 Критерий Куцбаха
Количество степеней свободы механизма также называется Мобильность устройства. мобильность количество входных параметров (обычно пара переменные), которые должны контролироваться независимо, чтобы устройство в определенную позицию. Критерий Куцбаха , которое аналогично уравнению Грюблера, вычисляет мобильность .
Для управления механизмом количество независимых входов движения должны равняться числу степеней свободы механизма. Например, транец на рис. 4-13а имеет одну степень свободы, поэтому ему нужен один независимый вход движения, чтобы открыть или закрыть окно. То есть вы просто толкаете или тянете стержень 3 для управления окном.
Чтобы увидеть еще один пример, механизм на рис. 4-15а также имеет 1 степень свободы. Если независимый вход
применяется к звену 1 ( например, , двигатель установлен на шарнире A для привода
звено 1), механизм будет иметь заданное движение.
4-15а также имеет 1 степень свободы. Если независимый вход
применяется к звену 1 ( например, , двигатель установлен на шарнире A для привода
звено 1), механизм будет иметь заданное движение.
4.5 Конечное преобразование
Конечное преобразование используется для описания движения точки на твердое тело и движение самого твердого тела.
4.5.1 Конечное плоское вращательное преобразование
Рисунок 4-16 Точка на плоском твердом теле, повернутом на угол
Предположим, что точка P на твердом теле совершает поворот описывающий круговой путь от P 1 до P 2 вокруг начала системы координат. Мы можем описать это движение оператором вращения Р 12 :
куда
4.5.2 Конечный планарный поступательный Трансформация
Рисунок 4-17 Точка на плоском твердом теле, смещенная на расстояние
Предположим, что точка P на твердом теле проходит через
перевод, описывающий прямой путь от P 1 до P 2 с заменой координат (x, y). Мы можем описать это
движение с оператором перевода T 12 :
Мы можем описать это
движение с оператором перевода T 12 :
куда
4.5.3 Конкатенация конечных плоских перемещений
Рисунок 4-18 Конкатенация конечных плоских перемещений в пространстве
Предположим, что точка P на твердом теле совершает поворот описывающий круговой путь от P 1 до P 2 ‘ вокруг начала системы координат, затем перевод, описывающий прямой путь от P 2 ‘ по Р 2 . Мы можем представить эти два шага как
а также
Мы можем объединить эти движения, чтобы получить
где D 12 — оператор плоского общего перемещения . :
4.5.4 Планарное преобразование твердого тела
Мы обсудили различные преобразования для описания
перемещения точки твердого тела. Могут ли эти операторы быть
применительно к перемещениям системы точек, такой как твердая
тело?
Могут ли эти операторы быть
применительно к перемещениям системы точек, такой как твердая
тело?
Мы использовали однородную матрицу-столбец 3 x 1 для описания вектора представляющий одну точку. Выгодная особенность планара 3 х 3 поступательные, вращательные и общие матричные операторы смещения заключается в том, что их можно легко запрограммировать на компьютере для управления 3 x n матрица из n векторов-столбцов, представляющих n точек твердого тела. Поскольку расстояние каждой частицы твердого тела от любой другой точка твердого тела постоянна, векторы, определяющие положение каждой точки твердого тела должно претерпевать такое же преобразование, когда твердое тело тело движется и задана правильная ось, угол и/или перемещение представлять его движение. (Сандор и Эрдман 84). Например, общее плоское преобразование за три очка A, B, C на жестком кузове можно изобразить по
4.5.5 Преобразование пространственного вращения
Мы можем описать оператор пространственного вращения для вращательного
преобразование точки относительно единичной оси u , проходящей через
начало системы координат. Предположим, угол поворота точки
о и есть ,
оператор вращения будет выражен как
Предположим, угол поворота точки
о и есть ,
оператор вращения будет выражен как
куда
- u x , u y , u z являются ортографическими
проекция единичной оси u на x , y , и
оси и соответственно.
- с = грех
- с = потому что
- v = 1 – потому что
- с = грех
4.5.6 Пространственное поступательное преобразование
Предположим, что точка P на твердом теле проходит через перевод, описывающий прямой путь от P 1 по P 2 с заменой координат (x, y, z) мы можем описать это движение с оператором перевода T :
4.5.7 Матрица пространственного перемещения и вращения для оси Через происхождение
Предположим, что точка P на твердом теле вращается под углом
перемещение относительно единичной оси u , проходящей через начало координат
сначала систему координат, а затем перевод D и по и . Этот состав этого вращательного
преобразование, и это трансляционное преобразование является винтом
движение. Соответствующий ему матричный оператор, винт оператор , является конкатенацией оператора перевода в уравнении 4-7 и оператора поворота в уравнении 4-9.
Этот состав этого вращательного
преобразование, и это трансляционное преобразование является винтом
движение. Соответствующий ему матричный оператор, винт оператор , является конкатенацией оператора перевода в уравнении 4-7 и оператора поворота в уравнении 4-9.
4.6 Матрица преобразования между твердыми телами
4.6.1 Матрица преобразования между двумя Arbitray Твердые тела
Для системы твердых тел можно установить локальную декартову система координат для каждого твердого тела. Матрицы преобразования используется для описания относительного движения между твердыми телами.
Например, два твердых тела в пространстве имеют локальные координаты
системы x 1 y 1 z 1 и
х 2 у 2 z 2 . Пусть точка P будет
прикреплен к корпусу 2 в месте (x 2 , y 2 ,
я 2 ) в локальной системе координат тела 2.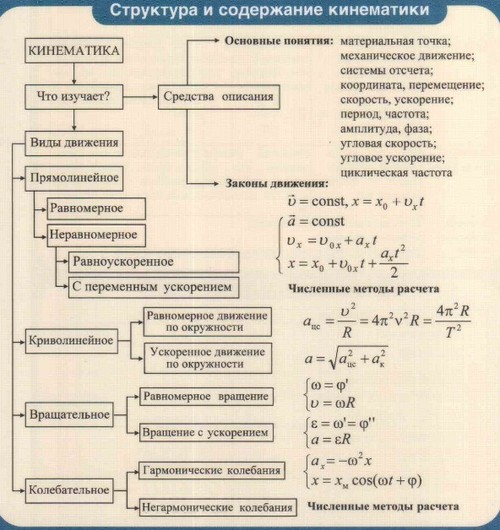 Чтобы найти
расположение P относительно локальной системы координат тела 1,
мы знаем, что точка x 2 y 2 z 2 можно получить из x 1 y 1 z 1 с помощью
комбинируя перемещение L x1 по оси x и
вращение z вокруг z
ось. Мы можем вывести матрицу преобразования следующим образом:
Чтобы найти
расположение P относительно локальной системы координат тела 1,
мы знаем, что точка x 2 y 2 z 2 можно получить из x 1 y 1 z 1 с помощью
комбинируя перемещение L x1 по оси x и
вращение z вокруг z
ось. Мы можем вывести матрицу преобразования следующим образом:
Если твердое тело 1 закрепить в виде рамы, На этом теле может быть создана глобальная система координат. Следовательно приведенное выше преобразование можно использовать для отображения локальных координат указать в глобальных координатах.
4.6.2 Кинематические ограничения между двумя жесткими Кузова
Приведенная выше матрица преобразования является конкретным примером для двух
несвязанные твердые тела. Матрица преобразования зависит от
относительное положение двух твердых тел. Если соединить два жестких
тела с кинематической связью, их
степени свободы уменьшатся.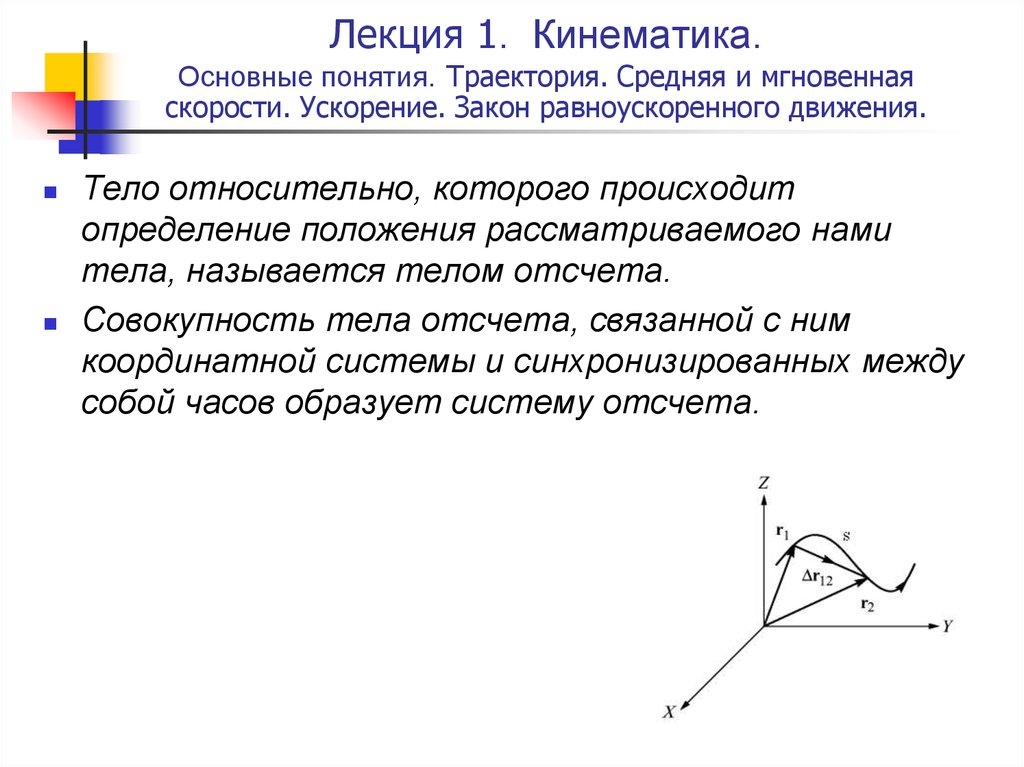 Другими словами, их родственник
движение будет задано в некоторой степени.
Другими словами, их родственник
движение будет задано в некоторой степени.
Предположим, мы ограничиваем два твердых тела с помощью вращающейся пары, как показано на рис. 4-19.. Мы можем по-прежнему запишите матрицу преобразования в той же форме, что и уравнение 4-18.
Рисунок 4-19 Относительное положение точек на зависимых телах
Отличие в том, что L x1 является константой теперь, потому что вращающаяся пара фиксирует начало системы координат x 2 y 2 z 2 относительно системы координат х 1 у 1 z 1 . Тем не менее, ротация г все еще является переменной. Таким образом, кинематические ограничения задают матрица преобразования в некоторой степени.
4.6.3 Обозначение Денавита-Хартенберга
Обозначение Денавита-Хартенберга (Denavit & Hartenberg 55)
широко используется при преобразовании систем координат рычажных механизмов и механизмов роботов. Может быть
используется для представления матрицы преобразования между ссылками, как показано на
Рисунок 4-20.
Может быть
используется для представления матрицы преобразования между ссылками, как показано на
Рисунок 4-20.
Рисунок 4-20 Обозначение Денавита-Хартенберга
На этом рисунке
- z i-1 и z i – оси двух вращательных пар;
- и угол между осями x i-1 и x i ;
- d i — расстояние между началом системы координат x i-1 y i-1 z i-1 и подножие обыкновенного перпендикуляр;
- a i — расстояние между двумя футами общего перпендикуляра;
- и угол между осями z i-1 и z i ;
Матрица преобразования будет T (и-1)и
Приведенную выше матрицу преобразования можно обозначить как T(a i , и , и , д и ) для удобства.
4.6.4 Применение матриц преобразования к связям
Рычажный механизм состоит из нескольких связанных твердых тел.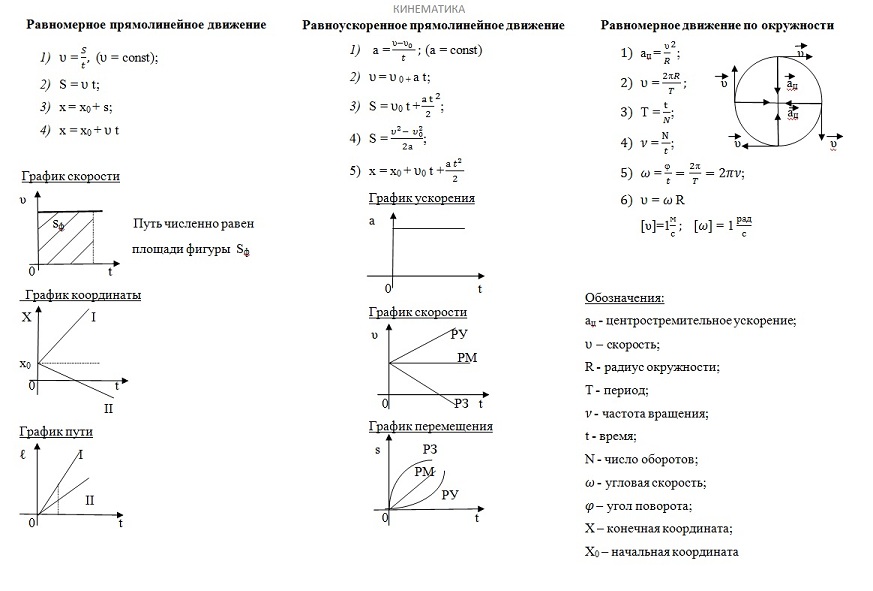 Как
механизм, рычажный механизм должен иметь раму. Матричный метод может быть
используется для вывода кинематических уравнений рычажного механизма. Если все
ссылки образуют замкнутый цикл, конкатенация всех
матрицы преобразования будут единичной матрицей. Если механизм
имеет н ссылки, мы будем иметь:
Как
механизм, рычажный механизм должен иметь раму. Матричный метод может быть
используется для вывода кинематических уравнений рычажного механизма. Если все
ссылки образуют замкнутый цикл, конкатенация всех
матрицы преобразования будут единичной матрицей. Если механизм
имеет н ссылки, мы будем иметь:
Т 12 Т 23 …Т (n-1)n = I
(4-20)
Содержание
Полное оглавление- 1 Введение в механизмы
- 2 Механизмы и простые механизмы
- 3 Подробнее о машинах и механизмах
- 4 Базовая кинематика жестких тел со связями
- 4.1 Степени свободы твердого тела
- 4.1.1 Степени свободы твердого тела на плоскости
- 4.1.2 Степени свободы твердого тела в пространстве
- 4.2 Кинематические ограничения
- 4.2.1 Нижние пары в планарных механизмах
- 4.2.2 Нижние пары в пространственных механизмах
- 4.

- 4.1.1 Степени свободы твердого тела на плоскости
- 2 Механизмы и простые механизмы