
Тема 6: Рівноприскорений рух. Прискорення. Швидкість тіла і пройдений шлях під час рівноприскореного прямолінійного руху. Графіки руху
Тема. Рівноприскорений рух. Прискорення. Швидкість тіла і пройдений шлях під час рівноприскореного прямолінійного руху. Графіки руху
Мета: сформувати знання про рівноприскорений рух і прискорення, швидкість тіла і пройдений шлях під час рівноприскореного прямолінійного руху, графічне зображення модуля переміщення на графіку швидкості в рівноприскореному русі, умінь виводити формулу проекції переміщення; виробляти вміння обчислювати прискорення, знаходити проекцію миттєвої швидкості за проекціями початкової швидкості і прискоренням; формувати відповідні знання і вміння щодо розв’язання основної задачі механіки.
Тип уроку: урок вивчення нового навчального матеріалу.
Унаочнення: демонстрування рівноприскореного прямолінійного руху, ППЗ «Фізика-9» від «Квазар-Мікро».
ХІД УРОКУ
I.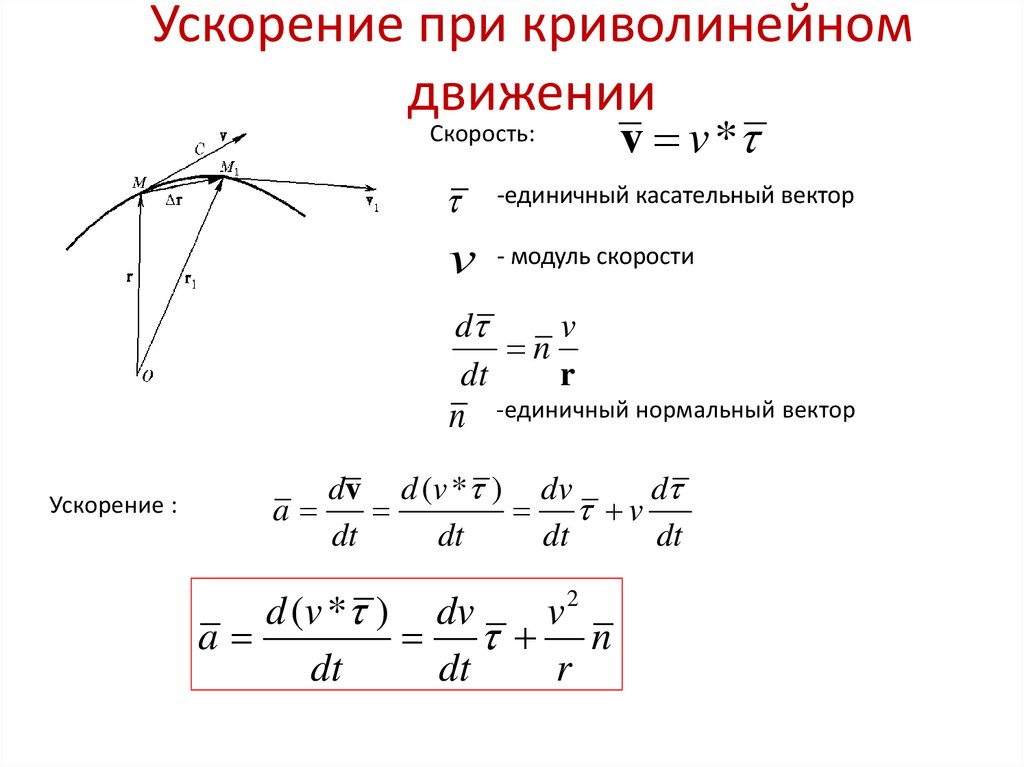 Аналіз результатів самостійної роботи
Аналіз результатів самостійної роботи
Показати кращі роботи учнів, спинитись на поясненні типових помилок.
II. Вивчення нового матеріалу
У ході лекції з використанням демонстрацій учні конспектують матеріал.
Рух матеріальної точки, під час якого її швидкість за будь-які однакові проміжки часу збільшується або зменшується на ту саму величину, називається рівнозмінним. Такий рух є найпростішим нерівномірним рухом. На практиці трапляються такі його наближення: гальмування всіх засобів транспорту, початок їх руху з поступовим збільшенням швидкості, вільне падіння тіл, коли вплив опору повітря незначний, тощо. До встановлених кінематичних величин для рівномірного прямолінійного руху (координати, переміщення, шляху, швидкості) в рівнозмінному прямолінійному русі додається прискорення, що характеризує швидкість зміни швидкості. Якщо в початковий момент часу t0 = 1 тіло має початкову швидкість 0, а через певний час t його швидкість дорівнює t, то вектор прискорення прямолінійного рівнозмінного руху можна визначити за формулою:
Прискорення — це векторна фізична величина, що дорівнює відношенню зміни швидкості до часу, протягом якого ця зміна відбулася.
Якщо швидкість за будь-які однакові проміжки часу збільшується на ту саму величину, то такий рух називається рівноприскореним. Якщо швидкість тіла зменшується часом на ту саму величину, то рух називають рівносповільненим. Якщо рівнозмінний рух прямолінійний, то за одну з осей координат (наприклад, Ox) зручно взяти пряму, по якій рухається матеріальна точка, а за її додатний напрям — напрям початкової швидкості 0. Тоді прискорення обчислюють як скалярну величину — проекцію вектора прискорення, тому формулу можна записати в скалярній формі:
Проекція вектора прискорення матиме знак «+», якщо напрям вектора прискорення збігається з напрямом вектора 0, і знак «-» у випадку протилежного напряму цих векторів. На підставі формули встановлюють одиниці вимірювання прискорення. Як одиницю прискорення в СІ взято прискорення 1 м/с2 – це прискорення такого рівнозмінного руху, під час якого швидкість за 1 с змінюється на 1 м/с.
Для побудови графіка прискорення прямолінійного рівнозмінного руху по осі ординат відкладають прискорення, а по осі абсцис — час. Оскільки під час рівнозмінного руху прискорення не змінюється, то графік прискорення є прямою, паралельною до осі часу. На рис. 1 показано графік прискорення прямолінійного рівноприскореного руху І (а = 2 м/с2) і рівносповільненого II (а = 4 м/с2).
Оскільки під час рівнозмінного руху прискорення не змінюється, то графік прискорення є прямою, паралельною до осі часу. На рис. 1 показано графік прискорення прямолінійного рівноприскореного руху І (а = 2 м/с2) і рівносповільненого II (а = 4 м/с2).
Рис. 1
Із формули прискорення легко визначити миттєву швидкість прямолінійного рівноприскореного руху:
Швидкість рівнозмінного руху є лінійною функцією часу, значення проекції вектора швидкості на вісь Ox:
Характерні графіки швидкості рівнозмінного руху матеріальної точки для різних випадків показано на рис. 2, на якому:
• а — графік швидкості рівноприскореного руху без початкової швидкості;
• б — графік швидкості рівноприскореного руху з початковою швидкістю;
• в — графік швидкості рівносповільненого руху.
Рис.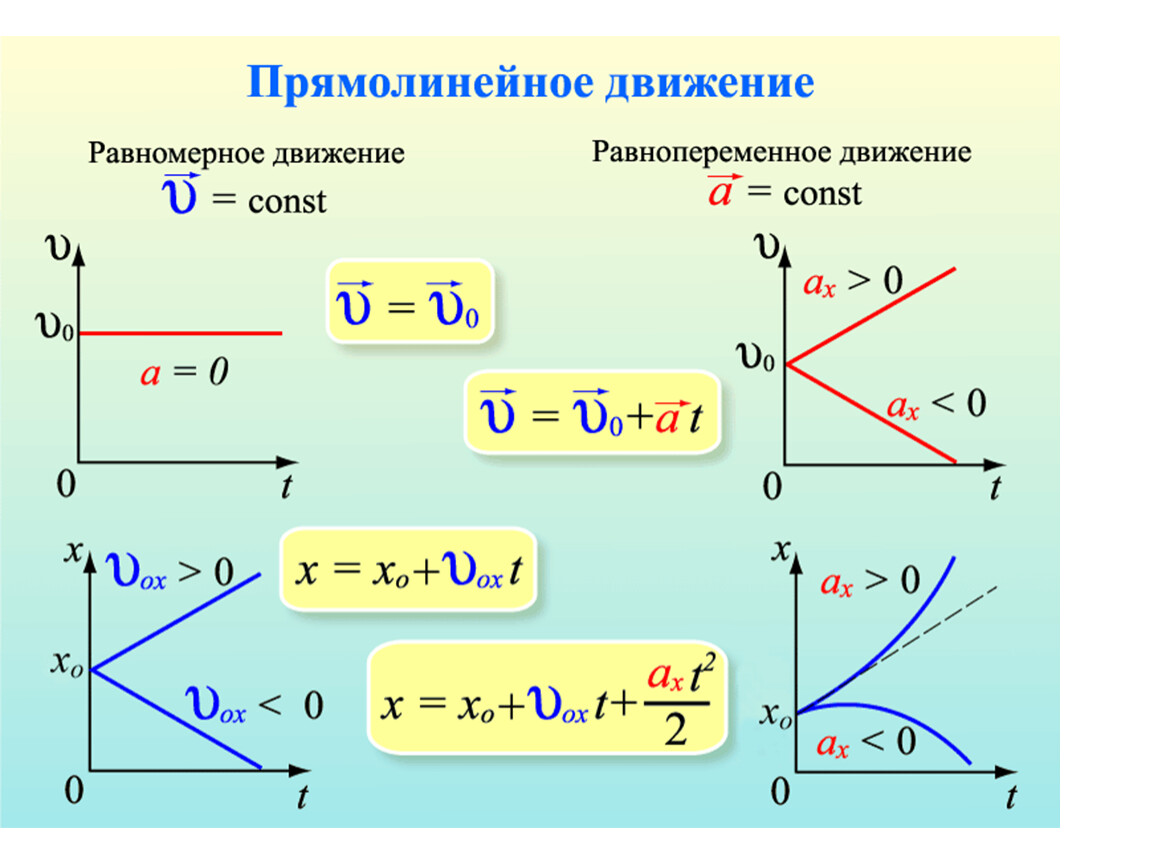 2
2
В усіх випадках графіки швидкості прямолінійного рівнозмінного руху мають вигляд прямих ліній, проведених під кутом до осі часу.
Слід мати на увазі, що напрям однієї з осей системи відліку збігається з напрямом вектора початкової швидкості . Якщо вектор прискорення спрямовано протилежно до вектора , тобто a < 0, значення швидкості t у деякий момент часу може виявитися від’ємним. Це означає, що швидкість t у цей момент часу також спрямовано протилежно до напряму 0.
Середню скалярну швидкість рівнозмінного руху можна знайти як середнє арифметичне початкової 0 і кінцевої t швидкостей у цьому інтервалі часу:
Якщо відомі час і середня скалярна швидкість, то шлях, пройдений матеріальною точкою під час рівнозмінного руху:
Після підстановки одержуємо:
Підставляючи замість t його значення із формули і перетворюючи праву частину рівності, знаходимо вираз шуканого шляху прямолінійного рівнозмінного (рівноприскореного) руху:
Це рівняння можна одержати в інший спосіб на підставі графіка швидкості рівноприскореного руху з початковою швидкістю (рис. 3). На цьому графіку пройдений шлях чисельно дорівнює площі трапеції, яку можна подати як суму площ прямокутника і трикутника, які. Таким чином, числове значення шляху рівноприскореного руху:
3). На цьому графіку пройдений шлях чисельно дорівнює площі трапеції, яку можна подати як суму площ прямокутника і трикутника, які. Таким чином, числове значення шляху рівноприскореного руху:
Рис. 3
Площа прямокутника дорівнює добутку основи t на висоту 0:
Sтр = 0t.
Площа трикутника дорівнює половині добутку основи t на висоту t – 0:
З огляду на те, що vt – v0 = at, маємо:
Додаючи площі S?@ і SB@, знаходять вираз для шляху рівнозмінного руху у вигляді рівняння
Якщо тіло рухається рівноприскорено без початкової швидкості (0 = 0), то пройдений шлях:
Таким чином, шлях, пройдений тілом у рівнозмінному русі, є квадратичною функцією часу і завжди додатною величиною.
Графіки шляху для різних видів прямолінійного рівнозмінного руху показано на рис. 4:
4:
• І — рівноприскореного руху з початковою швидкістю:
• ІІ — рівноприскореного руху без початкової швидкості:
• ІІІ — рівносповільненого руху:
Графіки шляху І і ІІ прямолінійного рівноприскореного руху є гілками парабол, вершини яких знаходяться в початку координат. У першому випадку крива є крутішою, тобто з двох тіл, що рухаються з однаковими прискореннями (а1 = а2) раніше пройде заданий шлях те тіло, початкова швидкість якого більша. За графіком шляху рівноприскореного руху можна визначити швидкість руху точки.
Рис. 4
Проекція переміщення під час рівноприскореного руху:
Для знаходження координати х точки в будь-який момент часу t потрібно до початкової координати х0 додати проекцію вектора переміщення на вісь Ox (рис. 5):
Цей вираз називають рівнянням рівнозмінного прямолінійного руху (кінематичний закон цього руху).
Рис. 5
Можливі залежності координати від часу у разі рівнозмінного руху зображено на рис. 6.
Рис. 6
Після деяких перетворень дістають рівняння прямолінійного рівнозмінного руху такого вигляду:
Якщо прямолінійний рівноприскорений рух тіла починається зі стану спокою (0 = 0), то рівняння набуває вигляду:
Ці формули часто використовують для розв’язування задач.
III. Розв’язування задач, складання конспекту
До конспекту учня
• Миттєвою швидкістю називається швидкість тіла в певний момент часу (або в певній точці траєкторії).
• Прискоренням тіла а називається відношення зміни швидкості тіла до інтервалу часу, за який ця зміна відбулася:
• Прямолінійним рівноприскореним рухом називається рух тіла вздовж прямої зі сталим прискоренням. Під час прямолінійного рівномірного руху швидкість тіла за будь-які рівні інтервали часу змінюється на ту саму величину.
Під час прямолінійного рівномірного руху швидкість тіла за будь-які рівні інтервали часу змінюється на ту саму величину.
• Швидкість: .
• Проекція швидкості: .
• Проекція переміщення для руху без початкової швидкості:
• Проекція переміщення для руху з початковою швидкістю:
• Залежність координати від часу для руху з початковою швидкістю:
• Середня швидкість:
• Співвідношення між переміщенням і швидкістю:
— без початкової швидкості:
— з початковою швидкістю:
Запитання для самоперевірки
1. Що таке прискорення і для чого його потрібно знати?
2. Що таке рівноприскорений рух?
3. Як напрямлений вектор прискорення у разі прямолінійного руху?
Коментоване розв’язування задачі на дошці
Під час прямолінійного рівноприскореного руху за 10 с швидкість тіла зменшилася з 20 м/с до 10 м/с. Яким є переміщення тіла за цей час? Якою була швидкість через 5 с після початку спостереження?
Яким є переміщення тіла за цей час? Якою була швидкість через 5 с після початку спостереження?
IV. Домашнє завдання
1. Вивчити відповідний параграф підручника, конспект уроку, формули.
2. Розв’язати задачі.
• За першу секунду рівноприскореного руху без початкової швидкості тіло пройшло 5 м. Яку відстань воно пройшло за перші 3 с? за перші 10 с?
• Поїзд рухається рівномірно і прямолінійно зі швидкістю 50 км/год. Накреслити графік швидкості і показати на ньому модуль переміщення за 3 год. руху.
Тема:Рівноприскорений рух, прискорення, одиниці приско-рення. Шлях, переміщення при рівноприскорено-му русі. Графіки швид-кості та прискорення при рівноприскореному русі.
Тема:Рівноприскорений рух, прискорення, одиниці приско-рення. Шлях, переміщення при рівноприскорено-му русі. Графіки швид-кості та прискорення при рівноприскореному русі.
Мета: сформувати знання про рівноприскорений рух і прискорення, швидкість тіла і пройдений шлях під час рівноприскореного прямолінійного руху, графічне зображення модуля переміщення на графіку швидкості в рівноприскореному русі, умінь виводити формулу проекції переміщення; виробляти вміння обчислювати прискорення, знаходити проекцію миттєвої швидкості за проекціями початкової швидкості і прискоренням; формувати відповідні знання і вміння щодо розв’язання основної задачі механіки.
Тип уроку: урок вивчення нового навчального матеріалу.
ХІД УРОКУ
- Привіттання з класом,перевірка відсутніх.
- Вивчення нового матеріалу
У ході лекції з використанням демонстрацій учні конспектують матеріал.
Рух матеріальної точки, під час якого її швидкість за будь-які однакові проміжки часу збільшується або зменшується на ту саму величину, називається рівнозмінним. Такий рух є найпростішим нерівномірним рухом. На практиці трапляються такі його наближення: гальмування всіх засобів транспорту, початок їх руху з поступовим збільшенням швидкості, вільне падіння тіл, коли вплив опору повітря незначний, тощо. До встановлених кінематичних величин для рівномірного прямолінійного руху (координати, переміщення, шляху, швидкості) в рівнозмінному прямолінійному русі додається прискорення, що характеризує швидкість зміни швидкості. Якщо в початковий момент часу
Прискорення — це векторна фізична величина, що дорівнює відношенню зміни швидкості до часу, протягом якого ця зміна відбулася.
Якщо швидкість за будь-які однакові проміжки часу збільшується на ту саму величину, то такий рух називається рівноприскореним. Якщо швидкість тіла зменшується часом на ту саму величину, то рух називають рівносповільненим.
Проекція вектора прискорення матиме знак «+», якщо напрям вектора прискорення збігається з напрямом вектора
 Як одиницю прискорення в СІ взято прискорення 1 м/с2 – це прискорення такого рівнозмінного руху, під час якого швидкість за 1 с змінюється на 1 м/с.
Як одиницю прискорення в СІ взято прискорення 1 м/с2 – це прискорення такого рівнозмінного руху, під час якого швидкість за 1 с змінюється на 1 м/с.Для побудови графіка прискорення прямолінійного рівнозмінного руху по осі ординат відкладають прискорення, а по осі абсцис — час. Оскільки під час рівнозмінного руху прискорення не змінюється, то графік прискорення є прямою, паралельною до осі часу. На рис. 1 показано графік прискорення прямолінійного рівноприскореного руху І (а = 2 м/с2) і рівносповільненого II (а = 4 м/с2).
Рис. 1
Із формули прискорення легко визначити миттєву швидкість прямолінійного рівноприскореного руху:
Швидкість рівнозмінного руху є лінійною функцією часу, значення проекції вектора швидкості на вісь Ox:
В усіх випадках графіки швидкості прямолінійного рівнозмінного руху мають вигляд прямих ліній, проведених під кутом до осі часу.
Слід мати на увазі, що напрям однієї з осей системи відліку збігається з напрямом вектора початкової швидкості . Якщо вектор прискорення спрямовано протилежно до вектора , тобто a < 0, значення швидкості t у деякий момент часу може виявитися від’ємним. Це означає, що швидкість t у цей момент часу також спрямовано протилежно до напряму 0.
Середню скалярну швидкість рівнозмінного руху можна знайти як середнє арифметичне початкової 0 і кінцевої t швидкостей у цьому інтервалі часу:
Після підстановки одержуємо:
Підставляючи замість t його значення із формули і перетворюючи праву частину рівності, знаходимо вираз шуканого шляху прямолінійного рівнозмінного (рівноприскореного) руху:
Проекція переміщення під час рівноприскореного руху:
Для знаходження координати х точки в будь-який момент часу t  5):
5):
Цей вираз називають рівнянням рівнозмінного прямолінійного руху (кінематичний закон цього руху).
Рис. 5
Після деяких перетворень дістають рівняння прямолінійного рівнозмінного руху такого вигляду:
Якщо прямолінійний рівноприскорений рух тіла починається зі стану спокою
Ці формули часто використовують для розв’язування задач.
III. Розв’язування задач, складання конспекту
До конспекту учня
• Миттєвою швидкістю називається швидкість тіла в певний момент часу (або в певній точці траєкторії).
• Прискоренням тіла а називається відношення зміни швидкості тіла до інтервалу часу, за який ця зміна відбулася:
• Прямолінійним рівноприскореним рухом називається рух тіла вздовж прямої зі сталим прискоренням.
• Швидкість: .
• Проекція швидкості: .
• Проекція переміщення для руху без початкової швидкості:
• Проекція переміщення для руху з початковою швидкістю:
• Залежність координати від часу для руху з початковою швидкістю:
• Середня швидкість:
• Співвідношення між переміщенням і швидкістю:
— без початкової швидкості:
— з початковою швидкістю:
Коментоване розв’язування задачі на дошці
Під час прямолінійного рівноприскореного руху за 10 с швидкість тіла зменшилася з 20 м/с до 10 м/с. Яким є переміщення тіла за цей час? Якою була швидкість через 5 с після початку спостереження?
Яким є переміщення тіла за цей час? Якою була швидкість через 5 с після початку спостереження?
Графік швидкості рівноприскореного руху. Накреслимо графік залежності швидкості від часу v = f(t) для прямолінійного рівноприскореного руху.
Як ми бачимо з формули vx = v0x + axt, що описує цей рух, між швидкістю й часом існує лінійна залежність, отже, цей графік матиме вигляд прямої лінії (мал. 225). Тангенс кута а між графіком і перпендикуляром до осі швидкості, що проведений через точку v0x, визначає темп збільшення швидкості:
Що більшою є ця величина, то на більше
значення зростає швидкість за одиницю часу, а отже, більшим є прискорення. За положенням графіка швидкості відносно перпендикуляра до осі швидкості, що проведений через точку v
Переміщення в рівноприскорено-му русі. Щоб отримати формулу для обчислення переміщення тіла під час рівноприскореного руху, скористаємося графічним методом, який дозволяє обчислити переміщення тіла як площу фігури під графіком залежності проекції швидкості руху тіла від часу.
Для цього зобразимо графік залежності швидкості тіла від часу для випадку, коли його початкова швидкість v0 Ф 0 і прискорення a > 0 (мал. 226). У цьому разі модуль переміщення чисельно дорівнює площі трапеції, що утворилася під графіком швидкості.
З курсу геометрії відомо, що площа трапеції дорівнює добутку півсуми основ трапеції на висоту. Відповідно, значення переміщення тіла можна обчислити за формулою:
Таким чином, формула для обчислення переміщення має вигляд:
Зауважимо, що в рівноприскорено-му прямолінійному русі, коли тіло рухається, не змінюючи напрямок руху, модуль переміщення дорівнює шляху, який пройшло тіло (s = l), і всі міркування щодо визначення переміщення в однаковій мірі стосуються шляху.
Для розв’язування задач часто застосовується формула залежності переміщення тіла від величини початкової й миттєвої швидкостей (швидкості тіла в певний момент часу). Її можна отримати, розв’язавши систему рівнянь:
Напишемо друге рівняння відносно часу
і підставимо
в перше. Після алгебраїчних перетворень отримаємо:
Після алгебраїчних перетворень отримаємо:
Тепер пригадаємо, що проекція переміщення виражається різницею
з попереднім. Отримаємо
звідки
Цей вираз ще називають кінематичним рівнянням координати для рівноприскореного руху.
Графік переміщення рівноприскореного руху. З курсу алгебри вам відома квадратична функція y = ax2 + bx + c, де х — аргумент; а ф 0; b і с — сталі величини.
Рівняння переміщення для рівноприскореного руху
також є квадратичною функцією, де аргументом є час (t), функцією — проекція переміщення (sx), коефіцієнтом при квадраті аргументу — половинне значення прискорення
що може набувати значення
Коефіцієнт при аргументі b — це початкова швидкість
яка може набувати значення
Графіком квадратичної функції є парабола (мал. 227, а).
гілки параболи спрямовані вгору, за
униз. Що меншим є модуль прискорення (а), то далі відходять гілки графіка від осі переміщення.
Що меншим є модуль прискорення (а), то далі відходять гілки графіка від осі переміщення.
Вершина параболи міститься в точці з координатами
Графік координати рівноприскореного руху. Якщо відкладати в певному масштабі по горизонтальній осі (осі абсцис) час, що пройшов з початку рівноприскореного руху, а по вертикальній осі (осі ординат) — значення координати тіла, то одержаний графік виражатиме залежність координати тіла від часу (його також називають графіком руху):
Для рівноприскореного руху графіком руху, як і в разі переміщення, є парабола, положення вершини якої також залежить від напрямів початкової швидкості та прискорення (мал. 227, б). У рівнянні
на відміну від рівняння переміщення, коефіцієнт с ф 0.
За допомогою графіків рівноприскореного прямолінійного руху тіла можна розв’язати основну задачу механіки — визначити положення тіла в будь-який момент часу.
Знання кінематичних величин рівноприскореного руху й уміння їх визначати має надзвичайно важливе практичне значення, адже в житті ми всі є учасниками дорожнього руху (мал.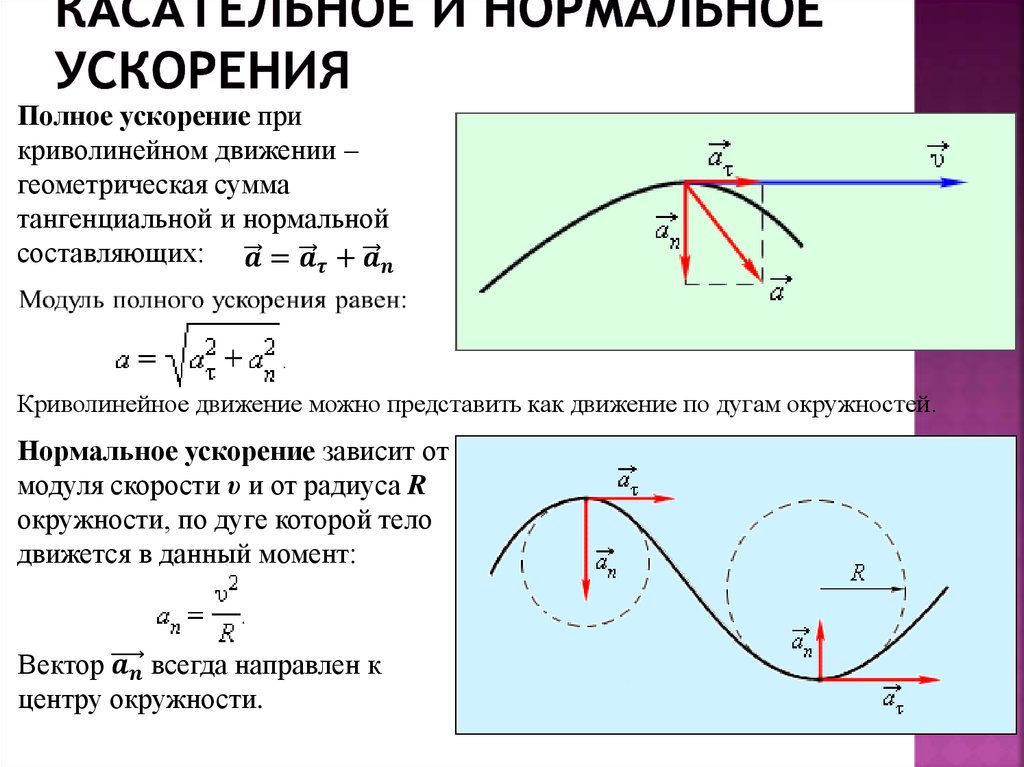 228).
228).
Формуємо КОМПЕТЕНТНІСТЬ
Я поміркую й зможу пояснити
1. Виведіть залежність переміщення тіла від часу при рівноприскореному русі у випадку ах < 0.
2. Яке з математичних рівнянь розв’язує основну задачу механіки для рівно-прискореного руху?
3. Схарактеризуйте рух тіл за графіками залежності швидкості від часу, що зображені на малюнку 229.
4. Схарактеризуйте рух тіл за графіками залежності переміщення від часу, що зображені на малюнку 230.
Вчимося розв’язувати задачі
Під час розв’язування задач слід виконувати певну послідовність дій.
1. Передусім слід вибрати систему відліку, яка складається з тіла відліку, пов’язаної з ним системи координат і приладу відліку часу. Визначити положення тіла в початковий момент часу.
2. Виконуючи схематичний малюнок до задачі, потрібно зобразити систему відліку, вказати напрямки векторних величин (переміщення, швидкості тощо).
3. Установити характер руху (рівномірний чи нерівномірний). Записати кінематичні рівняння (закони) руху для кожного тіла у векторній формі та в проекціях на вибрані осі координат. Урахувати знак проекції вектора на вибрану координатну вісь!
Установити характер руху (рівномірний чи нерівномірний). Записати кінематичні рівняння (закони) руху для кожного тіла у векторній формі та в проекціях на вибрані осі координат. Урахувати знак проекції вектора на вибрану координатну вісь!
4. За потреби, якщо кількість невідомих більша, ніж кількість рівнянь, — установити додаткові рівняння, які можуть виражати конкретні математичні зв’язки, що випливають з умови задачі.
5. Отриману систему рівнянь розв’язати відносно шуканих величин.
Для графічного розв’язування задачі використовують графіки залежності від часу координат або швидкості (переміщення чи шляху). Це дасть змогу визначати невідомі величини на основі графіків. Слід пам’ятати, що графічні залежності кінематичних величин можуть виявитися корисними як під час аналізу умови задачі, так і для перевірки результатів її розв’язання. На графіках в умовах задач (якщо немає відповідного пояснення) на вертикальній осі відкладено проекцію вектора на вісь ординат.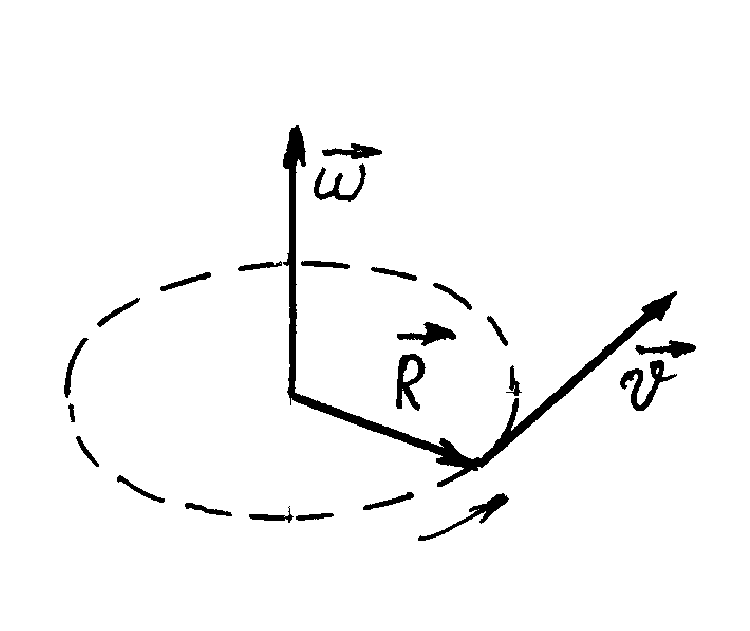
Графіки кінематичних величин прямолінійного руху
В умовах деяких задач не обумовлено, йдеться про вектор, його модуль чи про проекцію. Аналізуючи умову задачі (або відповідь), треба в кожному конкретному випадку уточнювати, що саме дано в задачі: вектор, його модуль чи проекцію. Зверніть увагу, що модуль векторної величини позначають просто буквою, не ставлячи значка вектора та модуля: замість
Вважається, що рух відбувається вздовж осі, додатний напрямок якої збігається з напрямком руху в початковий момент часу. У деяких задачах, де в умові чи відповіді значення якої-небудь векторної величини наведено зі знаком «мінус», йдеться про проекцію відповідного вектора на вісь координат.
Задача. Кульку штовхнули по похилому жолобу вгору зі швидкістю
Прискорення кульки
Визначте швидкість кульки через 8 с і 16 с
після початку руху.
Розв’язання:
Вісь Х направимо вздовж жолоба (мал. 231). Проекція вектора v0 збігається з напрямком осі Х, оскільки швидкість
231). Проекція вектора v0 збігається з напрямком осі Х, оскільки швидкість
зменшується, то вектор прискорення а напрямлений протилежно до осі Х.
Мал. 231. Рух кульки по похилому жолобу
Кінематичне рівняння швидкості
У проекціях на вісь Х з урахуванням знаків проекції векторів
Визначимо швидкість тіла в момент часу
У момент часу t2 = 16 c:
Знак «мінус» означає, що в момент часу t2 = 16 c швидкість кульки напрямлена протилежно осі Х, тобто кулька змінила напрямок руху і скочується вниз.
Я можу застосовувати знання й розв’язувати задачі
В права 23
1.
Залежність швидкості від часу в момент розгону автомобіля задано рівнянням v = 0,8t. Побудуйте графік швидкості й визначте швидкість наприкінці п’ятої секунди.
2.
Швидкість поїзда за 20 с зменшилася із 72 до 54 км/год. Напишіть формулу залежності швидкості від часу й побудуйте графік цієї залежності.
3.
Рівняння швидкості руху тіла v = 5 + 4t. Запишіть відповідне рівняння шляху.
4.
Автомобіль за 10 с збільшив швидкість із 18 до 27 км/год. Визначте прискорення і шлях, пройдений автомобілем за цей час.
5.
За який час автомобіль, рухаючись зі стану спокою з прискоренням 0,6 м/с2, проїде 30 м?
6.
Гальмовий шлях автомобіля, що рухається зі швидкістю v1 = 15 км/год, становить s1 = 1,5 м. Визначте гальмовий шлях s2 цього самого автомобіля, якщо він рухатиметься зі швидкістю v2 = 90 км/год. Прискорення в обох випадках однакове.
7.
Тіло рухається прямолінійно й рівноприскорено (а = 3 м/с2). Запишіть рівняння v = v(t) і побудуйте графік цієї функції, якщо початкова швидкість тіла v0 = 3 м/с.
8.
Рівняння руху тіла має вигляд: х = 0,4t2. Напишіть залежність vx(t) і побудуйте її графік. Заштрихуйте на графіку площу, що чисельно дорівнює шляху, пройденому тілом за 4 с, й обчисліть цей шлях.
9.
Рухаючись із прискоренням 0,3 м/с2, лижник з’їхав по схилу завдовжки 100 м за 20 с. Яку швидкість мав лижник на початку й у кінці схилу?
10.
Рухи матеріальних точок задано такими рівняннями: а) x1 = 10t + 0,4t2; б) x2 = 2t -12; в) x3 = -4t + 2t2; г) x4 = -t -6t2. Напишіть залежність v = v(t) для кожного випадку; побудуйте графіки цих залежностей; визначте вид руху в кожному випадку.
11.
Сноубордист з’їхав з гори, що має схил 40 м, за 10 с, а потім проїхав по горизонтальній ділянці ще 20 м і зупинився. Обчисліть швидкість у кінці схилу, прискорення на кожній ділянці, загальний час руху та середню швидкість на всьому шляху. Накресліть графік швидкості.
12.
Велосипедист перші 4 с рухався зі стану спокою з прискоренням 1 м/с2, а потім 0,1 хв їхав рівномірно й останні 20 м, доки не зупинився, — рівносповільнено. Обчисліть середню швидкість за весь час руху. Побудуйте графік v (t).
Обчисліть середню швидкість за весь час руху. Побудуйте графік v (t).
13.
Відстань між двома зупинками міжміський автобус проїхав із середньою швидкістю vG = 72 км/год за t = 20 хв. Розгін та гальмування разом тривали t1 = 4 хв, а решту часу автобус рухався рівномірно. Яку швидкість v мав автобус під час рівномірного руху?
IV. Домашнє завдання
1. Вивчити відповідний параграф підручника, конспект уроку, формули.
2. Розв’язати задачі.
• За першу секунду рівноприскореного руху без початкової швидкості тіло пройшло 5 м. Яку відстань воно пройшло за перші 3 с? за перші 10 с?
• Поїзд рухається рівномірно і прямолінійно зі швидкістю 50 км/год. Накреслити графік швидкості і показати на ньому модуль переміщення за 3 год. руху.
Прискорення. Рівноприскорений рух » mozok.click
Прискорення. У 7 класі ми розглядали механічний рух тіла, під час якого швидкість руху не змінюється (рівномірний рух). Під час рівномірного руху тіло (матеріальна точка) за будь-які однакові інтервали часу здійснює однакові переміщення. Рівномірно рухається кінець стрілки годинника, молекула газу між двома зіткненнями. У реальному житті найчастіше ми маємо справу з нерівномірним рухом, під час якого тіло за однакові інтервали часу здійснює різні переміщення. Тобто швидкість руху тіла постійно змінюється.
Під час рівномірного руху тіло (матеріальна точка) за будь-які однакові інтервали часу здійснює однакові переміщення. Рівномірно рухається кінець стрілки годинника, молекула газу між двома зіткненнями. У реальному житті найчастіше ми маємо справу з нерівномірним рухом, під час якого тіло за однакові інтервали часу здійснює різні переміщення. Тобто швидкість руху тіла постійно змінюється.
Під час руху швидкість може змінюватися й дуже стрімко (рух кулі в рушниці, старт ракети, розбіг літака) і порівняно повільно (початок руху потяга, гальмування автобуса). Очевидно, що для характеристики стрімкості зміни швидкості має існувати певна фізична величина. У фізиці цю величину називають прискоренням.
Ви дізнаєтесь
Про особливості рівноприскореного руху
Пригадайте
Означення рівномірного прямолінійного руху Скалярні та векторні величини
Прискорення a — це фізична векторна величина, що характеризує стрімкість зміни швидкості руху тіла (і за числовим значенням, і за напрямком) і визначається відношенням зміни швидкості тіла до інтервалу часу, протягом якого відбулася ця зміна:
Тут v0 — початкова швидкість руху тіла; v — його кінцева швидкість; Δt — інтервал часу, протягом якого відбулася зміна швидкості.
Одиниця прискорення — 1 м/с2 (метр за секунду у квадраті).
Зміна швидкості руху тіла, залежно від умов його руху, може бути довільною. Найчастіше трапляється такий випадок, за якого зміна швидкості характеризується однаковим темпом. Що мається на увазі? Нехай автомобіль починає рухатися (мал. 221) і за перші дві секунди розвиває м м
швидкість до 10 , за наступні дві секунди 20 , ще через дві секунди він уже рухається зі швидкістю 30 . Кожні дві секунди швидкість збільшується, і кожного разу на 10 . Як бачимо, під час руху автомобіля за однакові інтервали часу швидкість руху змінюється однаково, тобто прискорення під час руху залишається весь час сталим. У цьому разі говорять, що автомобіль рухається рівноприскорено.
Рівноприскорений прямолінійний рух. Дамо визначення рівноприско-реного руху.
Рух тіла, під час якого за будь-які однакові інтервали часу швидкість руху тіла змінюється однаково, тобто прискорення під час руху тіла залишається весь час сталим за напрямком і числовим значенням, а = const, називається рівноприскореним.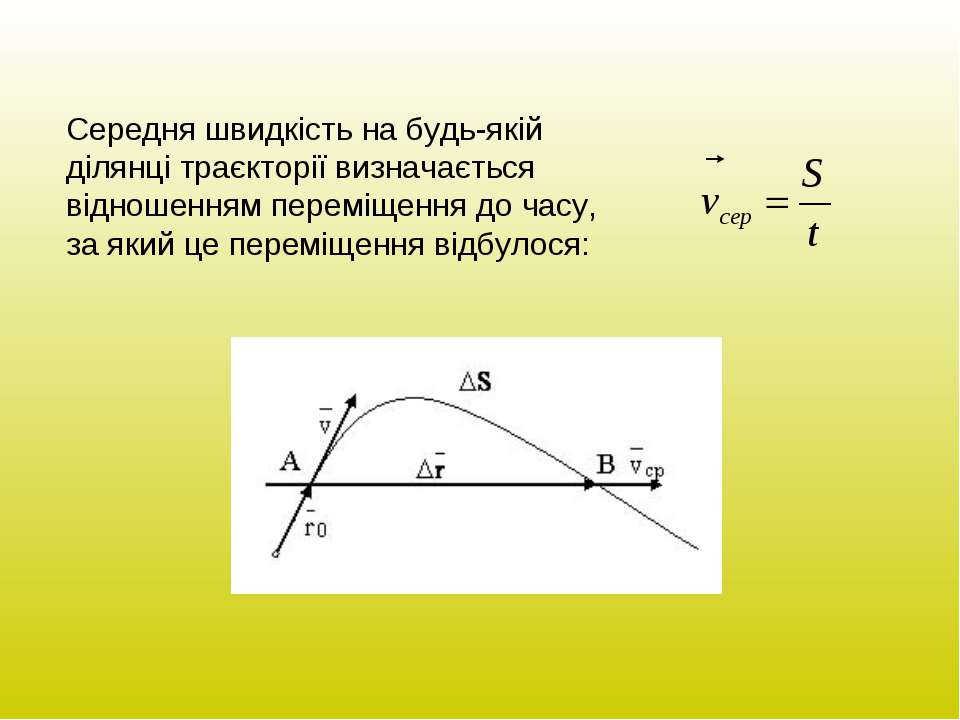
Рівноприскорений прямолінійний рух може бути власне прискореним, якщо швидкість тіла із часом зростає (мал. 222, а), тоді вектори v, v0, а напрямлені в один бік, і рівносповільненим, якщо швидкість зменшується (мал. 222, б), тоді вектор a напрямлений протилежно до векторів v, v0.
У посібниках з фізики і в задачах, щоб не акцентувати увагу на тому, прискорюється тіло чи сповільнюється, вживають термін рівнозмінний рух, або тільки термін рівноприскорений рух, зважаючи на те, що рівноспо-вільнений рух відрізняється лише знаком проекції вектора прискорення.
Прискорення руху визначають, враховуючи векторні властивості цієї фізичної величини. Зокрема, якщо напрямок руху та позитивний напрямок осі Х збігаються, то у проекціях на вісь Х матимемо такий
вираз для прискорення:
У випадку прискореного руху
оскільки швидкість руху збільшується й
отже вектор
прискорення збігається з напрямком руху. Якщо рух сповільнений і швидкість із часом зменшується,
Якщо рух сповільнений і швидкість із часом зменшується,
й вектор прискорення напрямлений протилежно до напрямку руху.
Слід пам’ятати, що знак проекції прискорення залежить ще й від вибору системи відліку.
У цьому легко переконатись, якщо розглянути випадок, коли обидва тіла рухаються, наприклад, рівноприскорено, але у протилежних напрямках (мал. 223).
З формули для прискорення легко отримати кінематичне рівняння швидкості для рівноприскореного руху:
або в проекціях на обрану вісь
Графік залежності прискорення від часу для рівноприскореного руху.
Оскільки прискорення із часом не змінюється, має постійне значення та напрямок, то графік a = f(t) є прямою лінією, паралельною осі часу (мал. 224). Як правило, на графіках по осі абсцис відкладають значення часу, по осі ординат — модуль або проекцію прискорення.
Мал. 224. Графік залежності прискорення від часу при рівноприскореному русі: а — для проекцій прискорення; б — для модуля прискорення
Як видно з графіка, у випадку власне прискореного руху графік розташований вище за вісь часу, оскільки значення проекції прискорення додатне. Якщо ж тіло гальмує, рух сповільнений, проекція прискорення від’ємна, то графік розташований під віссю абсцис. За графіком модуля прискорення визначити, прискорюється чи сповільнюється тіло, неможливо.
Якщо ж тіло гальмує, рух сповільнений, проекція прискорення від’ємна, то графік розташований під віссю абсцис. За графіком модуля прискорення визначити, прискорюється чи сповільнюється тіло, неможливо.
Формуємо КОМПЕТЕНТНІСТЬ
Я поміркую й зможу пояснити
1. За будь-якого нерівномірного руху змінюється швидкість. Як прискорення характеризує цю зміну?
2. Як спрямовано вектор прискорення у прямолінійному рівнозмінному русі? У яких випадках проекція прискорення має додатне, а в яких — від’ємне значення?
3. Чи може швидкість руху тіла дорівнювати нулю, а прискорення не дорівнювати нулю?
4. Чи можуть два тіла, які рухаються по одній прямій у протилежних напрямках, мати однакові вектори прискорень?
5. Тіло починає рухатися зі стану спокою прямолінійно, проходячи щосекунди шлях, на 1 м більший, ніж за попередню секунду. Чи стале прискорення тіла?
6. Швидкість прямолінійного руху тіла щосекунди збільшується на 2 %: а) від початкового значення; б) від значення швидкості на початку кожної секунди. Чи стале прискорення тіла в обох випадках?
Чи стале прискорення тіла в обох випадках?
Я можу застосовувати знання й розв’язувати задачі
В права 22
1.
Поїзд через 10 с після початку руху набув швидкості 0,6 м/с. Через скільки часу від початку руху швидкість поїзда становитиме 3 м/с?
2.
Велосипедист їде з гори з прискоренням 0,3 м/с2. Якої швидкості набуде велосипедист через 20 с, якщо його початкова швидкість становила 4 м/с?
3.
За який час автомобіль, рухаючись із прискоренням 0,4 м/с2, збільшить свою швидкість від 12 до 20 м/с?
4.
Наближаючись до станції, потяг рухався зі швидкістю 90 км/год й після початку гальмування зупинився через 50 с. Визначте прискорення потяга під час гальмування.
5.
Через скільки секунд після відходу від станції швидкість поїзда метрополітену досягне 72 км/год, якщо прискорення під час розгону становить 1 м/с2?
Це матеріал з підручника Фізика 9 клас Засєкіна (поглиблений рівень)
Як напрямлений вектор прискорення у разі прямолінійному руху?
1. Камінь масою 0,4 кг кинули вертикально вгору зі швидкістю 20 м/с.Чому дорівнює кінетична і потенціальна енергія каменя на висоті 10м?
Камінь масою 0,4 кг кинули вертикально вгору зі швидкістю 20 м/с.Чому дорівнює кінетична і потенціальна енергія каменя на висоті 10м?
1.Спирт при 20°С у скляній капілярній трубці піднімається на висоту 10 см. Знайти внутрішній діаметр капіляра.(поверхневий натяг спирту 22мН/м.Густина … спирту 800кг/м³) 2.Теплова машина за цикл отримує від нагрівника кількість теплоти 100 Дж й віддає холодильнику 55 Дж.Чому дорівнює ККД машини? 3.Насос,двигун якого розвиває потужність 25 кВт, піднімає обєм нафти на висоту 6м за 8 хв. Визначити обєм нафти , якщо ККД установки 39%(густина нафти 800кг/м³)
В системе так называемого динамического отопления холодильная машина работает в качестве теплового насоса по обращенному циклу Карно. Она отнимает нек
… оторое количество теплоты у наружного холодного воздуха при температуре t2 – -2 4 °С и передает тепло комнате при температуре воздуха t1 = 20 °С. Какое количество теплоты будет передано воздуху в комнате, если над машиной была произведена работа А = 300 Дж? [1] 300 Дж. [2] 345 Дж. [3] 690 Дж. [4] 2000 Дж.
[2] 345 Дж. [3] 690 Дж. [4] 2000 Дж.
Запишіть закон Ома для Ділянки кола та для повного кола
33. Имеется шар с диаметром1 m и массой 5 kg, ровнополовина которого находитсяв земле. Какую работу (J)нужно совершить, чтобыподнять шар на стол высот … ой3 m?
Помогите,физика сириус 2 задача1.) Определите эквивалентное сопротивление проволочной сетки, изображённой на рисунке, если (вне зависимости от длины) … сопротивление каждого проводника между соседними выделенными точками, к которым он подключён, r=240 Ом. Ответ выразите в омах, округлите до целого числа. (ответ 290)2.) В условиях предыдущей задачи найдите, какое будет напряжение между точками A и B, если к выводам участка цепи подсоединить идеальную батарейку с напряжением 9 В. Ответ выразите в вольтах, округлите до целого числа.
В каскаді на біполярному транзисторі p-n-p структури в якій області напруги на переході база-колектор повинна знаходитися робоча точка
Визначити вихідну потужність пристрою на опорі навантаження 16Ом якщо Uвх=10мВ К=400раз. Напруга вимірюється вольтметром(ефективне значення)
Напруга вимірюється вольтметром(ефективне значення)
Визначити вихідну напругу двокаскадного підсилювача якщо Uвх=5мВ К1=20 раз а К2=100 раз
. Два резистори з опорами 5 Ом і 15 Ом з’єднані послідовно. Струм першого з них рівний 0,5 А. Знайдіть струм другого резистора.
Криволінійний рух. Прискорення при криволінійному русі
Зміст:
Криволінійний рух – це рух, траєкторія якого представляє собою криву лінію (наприклад, окружність, еліпс, гіперболу, параболу). Прикладом криволінійного руху є рух планет, кінця стрілки годинника по циферблату і т. д. У загальному випадку швидкість при криволінійніному русі змінюється за величиною і по напрямку.
Криволінійний рух матеріальної точки вважається рівномірним рухом, якщо модуль швидкості постійний (наприклад, рівномірний рух по колу), і є рівноприскореним, якщо модуль і напрям швидкості змінюється (наприклад, рух тіла, кинутого під кутом до горизонту).
Рис. 1.19. Траєкторія і вектор переміщення при криволінійному русі.
При русі по криволінійній траєкторії вектор переміщення направлений по хорді (рис. 1.19), а l – довжина траєкторії. Миттєва швидкість руху тіла (тобто швидкість тіла в даній точці траєкторії) спрямована по дотичній у точці траєкторії, де в даний момент знаходиться рухоме тіло (рис. 1.20).
Рис. 1.20. Миттєва швидкість при криволінійному русі.
Прискорення при криволінійному русіКриволінійний рух – це завжди прискорений рух. Тобто прискорення при криволінійному русі є завжди, навіть якщо модуль швидкості не змінюється, а змінюється тільки напрям швидкості. Зміна величини швидкості за одиницю часу – це тангенціальне прискорення:
або
Де vτ, v0 – величини швидкостей
в момент часу t0 + Δt
t0 відповідно.
Тангенціальне прискорення в даній точці траєкторії за напрямом збігається з напрямком швидкості руху тіла або протилежне йому.
Нормальне прискорення – це зміна швидкості по напрямку за одиницю часу:
Нормальне прискорення спрямоване по радіусу кривизни траєкторії (до осі обертання). Нормальне прискорення перпендикулярно до напрямку швидкості.
Доцентрове прискорення – це нормальне прискорення при рівномірному русі по колу.
Повне прискорення при рівномірному криволінійному русі тіла дорівнює:
Рух тіла по криволінійній траєкторії можна наближено представити як рух по дугам деяких кіл (рис. 1.21).
Рис. 1.21. Рух тіла при криволінійному русі.
Швидкість. Прискорення
Основними кінематичними величинами, що характеризують рух точки, є швидкість і прискорення. Якщо матеріальна точка за певний проміжок часу здійснила переміщення, то фізичну величину, що визначається відношенням переміщеннядо проміжку часу, за який відбулося переміщення, називатимемосередньою швидкістю:
= | (1. |
 1.7)
1.7)Оскільки вектор переміщення не повністю відображує характер руху, введемо поняття миттєвої швидкості – фізична величина, що визначається границею, до якої наближається середня швидкість, за умови, коли проміжок часу :
Отже, миттєва швидкість – векторна величина, яка дорівнює першій похідній від вектора переміщення за часом і напрямлена по дотичній до траєкторії в бік руху. При прямолінійному русі вектор швидкості напрямлений вздовж траєкторії. Миттєва швидкість – це швидкість точки в даний момент часу або в даній точці траєкторії. Вона визначає зміну координат з часом. Вектор швидкості, як і будь-який вектор, можна виразити через його проекції на координатні осі:
Значення модуля вектора швидкості:
= | (1.1.11) |
Якщо
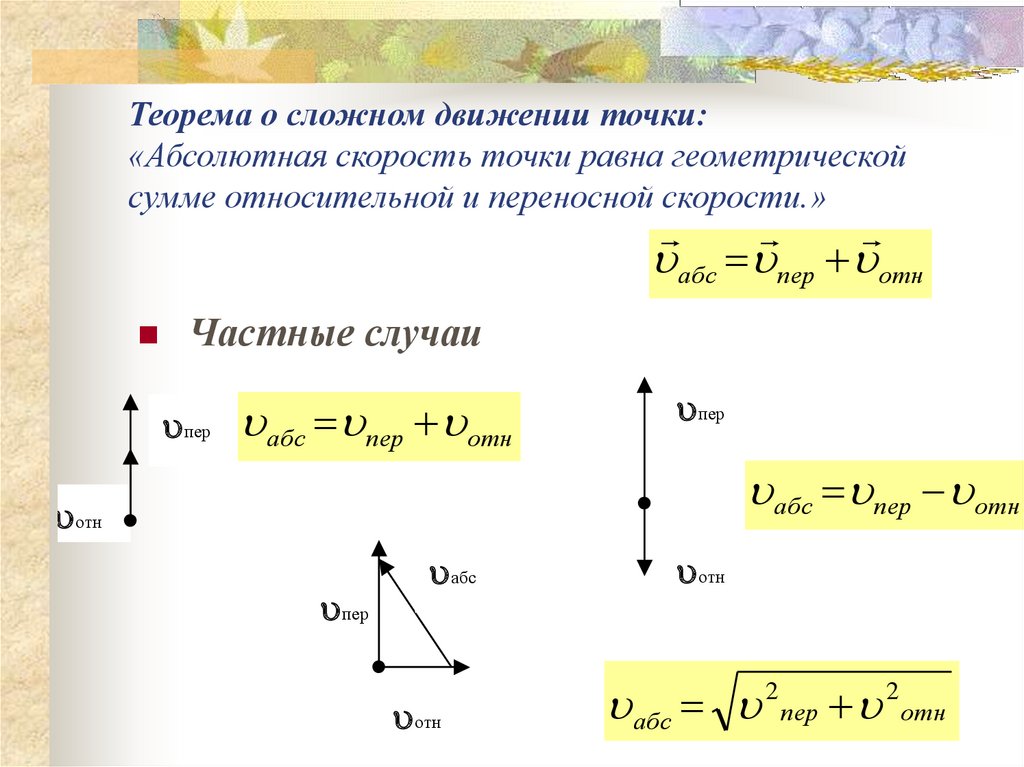
матеріальна точка приймає участь одразу
у декількох рухах із різними миттєвими
швидкостями, то повна швидкість точки
дорівнюватиме векторній сумі окремих
швидкостей. Це так зване правило
додавання швидкостей,
яке ввів ще Галілей, воно є наслідком принципу
незалежності рухів:
Це так зване правило
додавання швидкостей,
яке ввів ще Галілей, воно є наслідком принципу
незалежності рухів:
=. | (1.1.12) |
Якщо траєкторія руху матеріальної точки і рівняння її руху відомі, то значення миттєвої швидкості визначається першою похідною від шляху (скалярна величина) за часом:
= | (1.1.13) |
На практиці часто використовують скалярну середню величину швидкості, яка визначається відношенням пройденого шляху до часу проходження:
= | (1.1.13а) |
Рух,
при якому величина і напрям вектора
швидкості з часом не змінюється, називають рівномірним
і прямолінійним. Швидкість в СІ вимірюють такими одиницями:
Швидкість в СІ вимірюють такими одиницями:
=. | (1.1.14) |
Але на практиці користуються км/год, у морській справі – вузлами (1 вузол = 1 морській милі/год = 1,853 км/год), у реактивній авіації – махами (1 М = 1200 км/год). Існують спеціальні прилади, за допомогою яких безпосередньо вимірюють швидкість руху тіл. Наприклад, швидкість руху автомобіля вимірюють спідометром.
Зверніть увагу на те, що введене поняття середньої швидкості – це не середнє арифметичне, а середнє за часом. Якщо за проміжок часу швидкість руху була, а за інтервалвона дорівнювала, то середня за часом швидкість:
=. | (1.1.15) |
Якщо
б замість
іми користувалися відповідно величинамиі,
то дістали бшвидкість,
усереднену за відстанню. Таким поняттям користуються у
гідродинаміці. Отже, середня швидкість
– це, швидкість усереднена за часом.
Таким поняттям користуються у
гідродинаміці. Отже, середня швидкість
– це, швидкість усереднена за часом.
При русі матеріальної точки її швидкість у загальному випадку може змінюватися як за величиною, так і за напрямом. Зміну швидкості за часом характеризують фізичною величиною, яку називають прискоренням. Повна зміна швидкості за час:
= | (1.1.16) |
Величину відношення зміни швидкості до часу, за який ця зміна відбулася, називатимемосереднім прискоренням:
= | (1.1.17) |
Оскільки
середнє прискорення не повністю
відображує характер руху матеріальної
точки, то вводять ще поняття миттєвого
прискорення,
тобто прискорення в даний момент часу
або прискорення в даній точці траєкторії. Миттєве значення прискорення визначається
границею, до якої прямує величина
при:
Миттєве значення прискорення визначається
границею, до якої прямує величина
при:
Якщо матеріальна точка рухається із сталим прискоренням, то такий рух називаютьрівнозмінним. Прискорення – векторна величина. Вектор напрямлений у той бік, куди напрямлений вектор зміни швидкості . Прискорення вимірюють одиницями:
= | (1.1.19) |
Розглянемо випадок, коли траєкторія руху матеріальної точки – плоска крива лінія (Мал.1.1.3). Нехай у момент часуматеріальна точка в точцітраєкторії мала швидкість, а в момент часув точцітраєкторії – швидкість.
Зробимо паралельне перенесення векторів іна окремий рисунок (Мал.1.1.4), з якого видно, що при криволінійному русівектор прискорення завжди напрямлений у бік угнутості траєкторії, оскільки напрям визначається напрямом вектора . Векторможна розкласти на дві взаємно перпендикулярніскладові:
За означенням миттєве прискорення:
де
і- відповідно тангенціальна та нормальна
складові повного прискорення.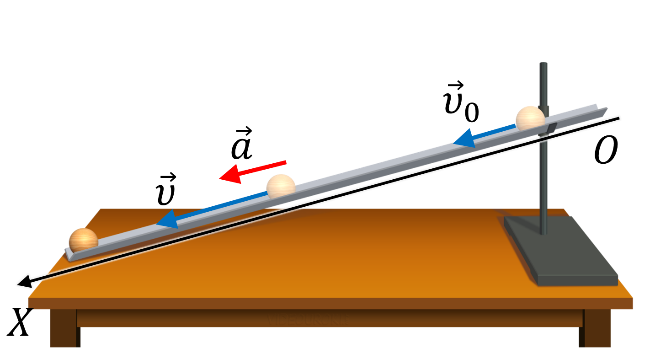
Тангенціальне прискорення характеризує зміну швидкості за величиною і напрямлене по дотичній в даній точці траєкторії.
Нормальне , абодоцентрове прискорення характеризує зміну швидкості за напрямом і напрямлене вздовж миттєвого радіуса кривизни до центра.
Модуль і напрям повного прискорення в даній точці траєкторії:
де – кут між вектором прискорення і дотичною до траєкторії руху матеріальної точки в даний момент часу (Мал.1.4). Тангенціальне і нормальне прискорення можуть бути ознаками різних рухів:
При
русі в один і той же бік по прямолінійній
траєкторії швидкість змінюється лише
за модулем. Відповідно прискорення
повинно визначатися значенням
– похідної модуля швидкості за часом.
При рівномірному русі по криволінійній
траєкторії=0,
отже, швидкість змінюється тільки за
напрямом. Отже, і напрям швидкості буде
змінюватися тим швидше, чим більша
кривизна траєкторії і чим швидше
рухається частинка (чим більше).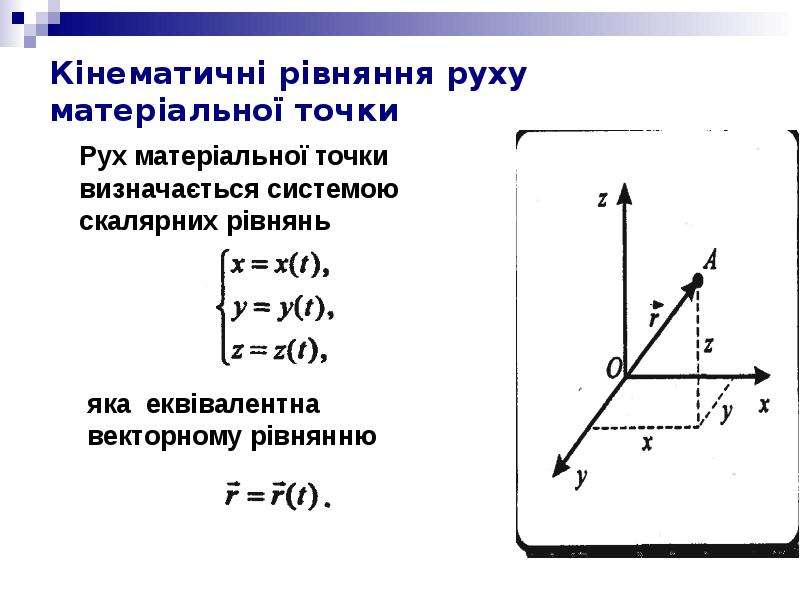
Рекомендована література:
Кудрявцев П.С. Курс истории физики. – М.: Просвещение, 1982.–448 С.
Храмов Ю.А. Физики: биографический справочник.–К.: Наукова думка, 1977.–511с.
Савельев И.В. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1987. – 432 с.
Бушок Г.Ф., Левандовський В.В., Півень Г.Ф. Курс фізики. 1 кн. Фізичні основи механіки. Електрика і магнетизм. – К.: Либідь, 2001. – 448 с.
Кучерук І.М., Горбачук І.Т. Загальна фізика. 1 кн. Фізичні основи механіки. Молекулярна фізика і термодинаміка. – К.: Вища шк., 1995. – 431 с.
Зисман Г.А., Тодес О.М. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1974.
Гершензон Е.М., Малов Н.Н. Курс общей физики. Механика. – М.: Просвещение, 1987.
 – 307 С.
– 307 С.Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. Т.1.– М.: Мир.
Киттель Ч., Найт У., Рудерман М. БКФ. Механика. – М.: Наука, 1975. – 480 С.
Детлаф А.А., Яворский Б.М. Курс физики. – М.: Высш. шк.., 1989. – 608 с.
Кузьмичев В.Е. Законы и формулы физики. Справочник. – Киев: Наук. думка, 1989. – 864 с.
Иродов И.Е. Основы классической механики. – М.: Высш. шк.
Голдстейн Г. Классическая механика.
Савельев И.В. Курс физики. В 3-х томах. Т.1. Механика. Молекулярная физика.– М.: Наука, 1989. – 352 с.
Факультет машинобудування | ||
Лектор Дон Н.Л. | стор. 9з9 |
Співвідношення між лінійними та кутовими величинами
Лекція №1 Кінематика
Елементи кінематики
Рух матеріальної точки. Переміщення
Швидкість. Прискорення
Рух по колу
Співвідношення між лінійними та кутовими величинами
ü ЕЛЕМЕНТИ КІНЕМАТИКИ
Завдання механіки полягає у вивченні різних рухів та встановленні їх законів, які дають можливість наперед передбачати потрібні рухи і конструювати механізми та машини.
Спочатку виникла та розвивалась так звана класична механіка, основні закони якої були сформульовані Ньютоном. Вона вивчає рухи макроскопічних тіл, швидкості яких малі порівняно із швидкістю світла. Макроскопічні тіла – це звичайні тіла, що оточують нас, тобто тіла, які складаються з великої кількості молекул та атомів. Рухи тіл, швидкості яких близькі до швидкості світла, вивчаються у релятивістській механіці, основою якої є теорія відносності. Рухи мікроскопічних тіл (елементарних частинок) вивчає квантова механіка.
Традиційно вивчення курсу фізики починається з класичної механіки. Це зумовлено тим, що основні її питання і методи при відповідних узагальненнях використовуються у всіх інших розділах фізики. Щодо підходу вивчення механічних рухів механіку поділяють на:
§ кінематику, яка вивчає змину положення тіл або їхніх частин у просторі або в часі без урахування взаємодії з іншими тілами;
§ динаміку – це основний розділ механіки, в якому встановлюються закони механічних рухів у зв’язку з тими механічними взаємодіями тіл, які ведуть до зміни їх механічних станів;
§ статику, яка вивчає умови рівноваги тіл. Її закони можна вивести із законів динаміки, тому статику розглядають як окремий випадок динаміки.
Оскільки поняття простору і часу – категорії філософські, то фізика тільки встановлює властивості, притаманні саме їм. На основі дослідних даних у фізиці вважається, що властивості простору і часу не залежать від наявності матеріальних тіл, що простір – тривимірний, однорідний, неперервний та ізотропний.
Однорідність простору означає, що в будь-якому його місці фізичні явища при однакових умовах відбуваються однаково. Ізотропність простору означає, що повертання системи взаємодіючих тіл на деякий кут не впливає на перебіг фізичних процесів. Класична фізика вважає, що час також однорідний, неперервний і не залежить від наявності матеріальних тіл.
Об’єктами вивчення механіки є не реальні тіла в усій їх багатогранності, а ідеалізовані об’єкти – моделі– це деякий уявний образ явища, що спирається на відомі поняття і дозволяє побудувати корисну аналогію:
§ матеріальна точка;
§ абсолютно тверде тіло;
§ ідеальна рідина, тощо.
Такі наукові абстракції дають можливість зосередити дослідження на з’ясуванні основних законів механічного руху, опускаючи другорядні деталі явищ, а також дають можливість використовувати математичний апарат при вивченні механічних рухів. За видом об’єктів дослідження механіку поділяють на:
§ механіку матеріальної точки;
§ механіку твердого тіла;
§ механіку суцільних середовищ (гідродинаміку, газодинаміку, теорію пружності).
Матеріальна точка – найпростіший об’єкт, рух якого вивчає механіка – макроскопічне тіло, розмірами якого в даному випадку можна нехтувати, маса якого зосереджена в одній геометричній точці. Поняття про те, коли реальне тіло можна вважати матеріальною точкою, залежить не стільки від самого тіла, скільки від характеру руху, а також від змісту тих запитань, на які необхідно отримати відповіді. Абсолютні розміри тіла не відіграють ні якої ролі. Важливими є відносні розміри, тобто відношення розмірів тіла до деяких відстаней, характерних для конкретної задачі. Одне і те саме тіло в одних умовах можна вважати матеріальною точкою, в інших – ні. Так, вивчаючи рух Землі навколо Сонця, Землю можна вважати матеріальною точкою, оскільки її діаметр становить 0,0001 радіуса земної орбіти. Тіло протяжних розмірів можна замінити матеріальною точкою в тих випадках, коли важливими є не розміри і форма тіла, і його маса.
Механіка однієї матеріальної точки в класичній фізиці є основою для вивчення механіки взагалі, оскільки макроскопічне тіло, або систему тіл, можна уявити як сукупність малих тіл, кожне з яких можна вважати матеріальною точкою.
ü РУХ МАТЕРІАЛЬНОЇ ТОЧКИ. ПЕРЕМІЩЕННЯ
Положення точок у просторі можна характеризувати різними способами, згідно з якими можна описувати і рух точки.
Координатний спосіб опису руху.При русі матеріальної точки відносно системи відліку кожному моменту часу відповідатимуть певні значення її координат. Рух матеріальної точки можна визначити, якщо відома функціональна залежність її координат від часу:
З допомогою функцій (1) можна обчислити значення координат матеріальної точки для будь-яких моментів часу. Отже, описати рух – значить задати функції (1).
Лінія, яку описує матеріальна точка в просторі, називається траєкторією руху. Рівняння траєкторії в явній формі можна дістати з системи рівнянь (1). Якщо траєкторія – пряма лінія, то рух називають прямолінійним; якщо ж це крива лінія, то, рух – криволінійний. Найпростішим прикладом криволінійного руху є рух матеріальної точки по колу. При цьому характер її траєкторії залежить від системи відліку. Так, точки обода колеса, що котиться по горизонтальній площині, матиме різні траєкторії відносно осі обертанні і відносно поверхні площини. У першому випадку це буде коло, у другому – циклоїда. Довжину траєкторії, яку проходить точка за проміжок часу, називатимемо шляхом.
Векторний спосіб опису руху.Положення матеріальної точки в просторі також можна задати за допомогою радіуса-вектора , який проводять з початку системи координат до матеріальної точки. Цей спосіб є більш раціональним. При русі матеріальної точки в загальному випадку величина і напрям з часом змінюються, тобто він є функцією часу:
| = | (2) |
У будь-який момент часу проекції радіуса-вектора на координатні осі дорівнюють координатам точки. Радіус-вектор через координати точки виражатиме так:
де , , – орти, тобто одиничні вектори. При векторному способі опису руху точки одне векторне рівняння (3) замінює три рівняння (1).
Опис руху за допомогою параметрів траєкторії.Він застосовується у випадках, коли траєкторія руху є наперед відомою. Якщо траєкторія задана, то завдання зводиться до зазначення закону руху вздовж неї. Деяка точка траєкторії приймається за початкову, а будь-яка інша характеризується відстанню вздовж неї від початкової точки, встановлюється на траєкторії додатній і від’ємний напрямок відліку (як на осі координат) (Рис.1). Цей шлях не є вектором, він є скаляром, і не має певного напряму в просторі. В цьому випадку рух описується формулою:
| = | (4) |
Вектор переміщення.Розглянемо матеріальну точку, яка в момент часу знаходиться в точці , радіус-вектор якої (Рис.2). В момент часу ( ) матеріальна точка буде знаходитись в точці , радіус-вектор якої .
Отже, положення точок та можна задавати радіус-векторами, проведеними з початку координат будь-яких систем відліку. Характерним при цьому є те, що відрізок не залежить від вибору систем відліку.
Відрізок, що характеризує зміну положення матеріальної точки і має напрям від початкового до наступного її положення, називатимемо вектором переміщення:
Через відповідні зміни координат рухомої точки вектор переміщення має вигляд:
Криву, яку описує кінець радіус-вектора під час руху матеріальної точки, називають годографом. Отже, траєкторія руху матеріальної точки є годографом радіус-вектора . Модуль вектора переміщення в загальному випадку не збігається з довжиною ділянки траєкторії між цими точками. Такій збіг може бути у випадку прямолінійного руху. При русі точки по колу за час, що дорівнює періоду обертання, вектор переміщення дорівнює нулю, а довжина траєкторії – довжині кола.
Всі тіла при певних умовах деформуються, тобто змінюють свою форму. Введемо таку модель: тіло, яке при будь-яких умовах не зазнає деформації називатимемо його абсолютно твердими. У таких тілах відстань між точками, точніше між двома його частинами, залишається сталою. Якщо під час руху форма тіла не змінюється або зазнає незначних змін, його рух можна розглядати як рух абсолютно твердого тіла.
Будь-який складний рух абсолютно твердого тіла можна розкласти на два простих механічних рухи – поступальний і обертальний. Поступальним рухом тіла називатимемо такий рух, при якому пряма лінія, яка з’єднує будь-які точки тіла, з часом залишається паралельною сама собі, тобто її орієнтація у просторі не змінюється. При поступальному русі (один з найпростіших) переміщення всіх його точок однакові. Тому, знаючи рух будь-якої точки тіла, ми можемо визначити рух всіх інших його точок.
Обертальним рухом називатимемо такий рух, при якому траєкторії всіх точок тіла – це концентричні кола з центром на одній прямій, яку називатимемо віссю обертання. При обертальному русі вісь обертання може знаходитись за межами тіла, що здійснює обертальний рух, а може проходити через нього. Обертання тіла навколо осі можна розкласти на поступальний рух і обертання його навколо іншої осі.
Рух твердого тіла називатимемо плоским, якщо будь-яка точка тіла залишається в одній із паралельних площин.
ü ШВИДКІСТЬ. ПРИСКОРЕННЯ
Основними кінематичними величинами, що характеризують рух точки, є швидкість і прискорення. Якщо матеріальна точка за певний проміжок часу здійснила переміщення , то фізичну величину, що визначається відношенням переміщення до проміжку часу, за який відбулося переміщення, називатимемо середньою швидкістю:
| = | (7) |
Оскільки вектор переміщення не повністю відображує характер руху, введемо поняття миттєвої швидкості – фізична величина, що визначається границею, до якої наближається середня швидкість, за умови, коли проміжок часу :
Отже, миттєва швидкість – векторна величина, яка дорівнює першій похідній від вектора переміщення за часом і напрямлена по дотичній до траєкторії в бік руху. При прямолінійному русі вектор швидкості напрямлений вздовж траєкторії. Миттєва швидкість – це швидкість точки в даний момент часу або в даній точці траєкторії. Вона визначає зміну координат з часом. Вектор швидкості, як і будь-який вектор, можна виразити через його проекції на координатні осі:
Значення модуля вектора швидкості:
| = | (11) |
Якщо матеріальна точка приймає участь одразу у декількох рухах із різними миттєвими швидкостями, то повна швидкість точки дорівнюватиме векторній сумі окремих швидкостей. Це так зване правило додавання швидкостей, яке ввів ще Галілей, воно є наслідком принципу незалежності рухів:
| = . | (12) |
Якщо траєкторія руху матеріальної точки і рівняння її руху відомі, то значення миттєвої швидкості визначається першою похідною від шляху (скалярна величина) за часом:
| = | (13) |
На практиці часто використовують скалярну середню величину швидкості, яка визначається відношенням пройденого шляху до часу проходження:
| = | (13а) |
Рух, при якому величина і напрям вектора швидкості з часом не змінюється, називають рівномірним і прямолінійним. Швидкість в СІ вимірюють такими одиницями:
| = . | (14) |
Але на практиці користуються км/год, у морській справі – вузлами (1 вузол = 1 морській милі/год = 1,853 км/год), у реактивній авіації – махами (1 М = 1200 км/год). Існують спеціальні прилади, за допомогою яких безпосередньо вимірюють швидкість руху тіл. Наприклад, швидкість руху автомобіля вимірюють спідометром.
Зверніть увагу на те, що введене поняття середньої швидкості – це не середнє арифметичне, а середнє за часом. Якщо за проміжок часу швидкість руху була , а за інтервал вона дорівнювала , то середня за часом швидкість:
| = . | (15) |
Якщо б замість і ми користувалися відповідно величинами і , то дістали б швидкість, усереднену за відстанню. Таким поняттям користуються у гідродинаміці. Отже, середня швидкість – це, швидкість усереднена за часом.
При русі матеріальної точки її швидкість у загальному випадку може змінюватися як за величиною, так і за напрямом. Зміну швидкості за часом характеризують фізичною величиною, яку називають прискоренням. Повна зміна швидкості за час :
| = | (16) |
Величину відношення зміни швидкості до часу , за який ця зміна відбулася, називатимемо середнім прискоренням:
| = | (17) |
Оскільки середнє прискорення не повністю відображує характер руху матеріальної точки, то вводять ще поняття миттєвого прискорення, тобто прискорення в даний момент часу або прискорення в даній точці траєкторії. Миттєве значення прискорення визначається границею, до якої прямує величина при :
Якщо матеріальна точка рухається із сталим прискоренням, то такий рух називають рівнозмінним. Прискорення – векторна величина. Вектор напрямлений у той бік, куди напрямлений вектор зміни швидкості . Прискорення вимірюють одиницями:
| = | (19) |
Розглянемо випадок, коли траєкторія руху матеріальної точки – плоска крива лінія (Рис.3). Нехай у момент часу матеріальна точка в точці траєкторії мала швидкість , а в момент часу в точці траєкторії – швидкість .
Зробимо паралельне перенесення векторів і на окремий рисунок (Рис.4), з якого видно, що при криволінійному русі вектор прискорення завжди напрямлений у бік угнутості траєкторії, оскільки напрям визначається напрямом вектора . Вектор можна розкласти на дві взаємно перпендикулярні складові:
§ – вздовж вектора – називатимемо тангенціальною;
§ – вздовж нормалі до вектора – називатимемо нормальною.
За означенням миттєве прискорення:
де і – відповідно тангенціальна та нормальна складові повного прискорення.
Тангенціальне прискорення характеризує зміну швидкості за величиною і напрямлене по дотичній в даній точці траєкторії.
Нормальне , або доцентрове прискорення характеризує зміну швидкості за напрямом і напрямлене вздовж миттєвого радіуса кривизни до центра.
Модуль і напрям повного прискорення в даній точці траєкторії:
де – кут між вектором прискорення і дотичною до траєкторії руху матеріальної точки в даний момент часу (Мал.1.4). Тангенціальне і нормальне прискорення можуть бути ознаками різних рухів:
§ = – рівнозмінний рух;
§ , – рівномірний криволінійний рух;
§ , = – рівномірний рух по колу і т.д.
При русі в один і той же бік по прямолінійній траєкторії швидкість змінюється лише за модулем. Відповідно прискорення повинно визначатися значенням – похідної модуля швидкості за часом. При рівномірному русі по криволінійній траєкторії =0, отже, швидкість змінюється тільки за напрямом. Отже, і напрям швидкості буде змінюватися тим швидше, чим більша кривизна траєкторії і чим швидше рухається частинка (чим більше ).
ü РУХ ПО КОЛУ
Розглянемо, як окремий випадок криволінійного руху рівномірний рух матеріальної точки по колу радіуса з центром (Рис.5). При цьому швидкість руху точки залишається сталою за величиною, а змінюється за напрямом. Нехай за малий проміжок часу матеріальна точка перемістилась з точки траєкторії в точку . Зміна швидкості за напрямом при цьому характеризуватиметься вектором , який визначаємо паралельним перенесенням і відкладенням з точки вектора (Рис.5). Трикутник і трикутник зі сторонами , , – подібні. З їхньої подібності маємо:
Поділивши обидві частини на і перейшовши до границі, маємо:
Звідси маємо:
| = . | (25) |
Оскільки при кут , то і вектор буде перпендикулярним до вектора швидкості в точці траєкторії ( ), тобто напрямленим по радіусу до центра. Таке прискорення називатимемо доцентровим. Отже, при рівномірному русі матеріальної точки по колу тангенціального прискорення немає, а повне прискорення дорівнює доцентровому.
При обертальному русі твердого тіла навколо нерухомої осі всі його точки описують кола, центри яких лежать на осі обертання (Рис.6). Проведемо через вісь обертання дві площини1 і2. Одну з них (2) жорстко зв’яжемо з тілом, а другу (1) вважатимемо нерухомою. Обертання тіла навколо осі можна задати за допомогою кута між цими площинами. Якщо за проміжки часу тіло здійснило обертання на кут , то границю, до якої прямує відношення при , називаютьмиттєвою кутовою швидкістю, або простокутовою швидкістю.
Обертання тіла із сталою кутовою швидкістю називатимемо рівномірним. Нерівномірне обертання тіла характеризуватиме за допомогою кутового прискорення. Якщо за малий проміжок часу кутова швидкість змінилася на величину , то границя, до якої прямує відношення при , називатимемо миттєвим кутовим прискоренням, або просто прискоренням:
З урахуванням (26):
При обертальному русі всі точки твердого тіла мають однакові кутові швидкості і кутове прискорення. Кутову швидкість і кутове прискорення вимірюють:
ü СПІВВІДНОШЕННЯ МІЖ ЛІНІЙНИМИ ТА КУТОВИМИ ВЕЛИЧИНАМИ
Встановимо співвідношення між лінійною і кутовою швидкостями та лінійним і кутовим прискоренням. Довжина дуги , яку описує точка, що знаходиться на відстані від осі при обертанні на кут :
| = | (30) |
Поділимо на . При матимемо:
На основі формул (25) та (31) отримаємо, що нормальне прискорення:
Тангенціальне прискорення:
З рівнянь (32) та (33) видно, що як нормальне так і тангенціальне прискорення пропорційне відстані від осі обертання . Модуль повного прискорення точки тіла:
| = | (34) |
Отже, знаючи кутову швидкість і кутове прискорення тіла, що обертається, а також відстань від осі обертання, можна визначити величину і напрям прискорення будь-якої точки тіла. Оскільки відношення тангенціального прискорення до нормального:
| = | (35) |
є однаковим для всіх точок тіла, то вектор повного прискорення для всіх точок тіла утворює з радіусом, проведеним до цієї точки, один і той самий кут (Рис.7).
При обертальному русі кутова швидкість і кутове прискорення визначаються однозначно тоді, коли відоме розташування в просторі осі обертанні і вказано напрям обертання навколо неї.
Оскільки лінійна швидкість і лінійне прискорення – векторні величини, а крім того між величинами , , , і існує взаємозв’язок у вигляді формул (31)-(34), то кутову швидкість і кутове прискорення доцільно визначати як вектори.
Вектор кутової швидкості зображують відрізком прямої, яка збігається з віссю обертання. Довжина цієї прямої в певному масштабі виражає величину кутової швидкості. Цей зв’язок умовились встановлювати за правилом правого гвинта: вектор кутової швидкості напрямлений вздовж осі обертання в бік поступального руху гвинта, коли його обертати за напрямом обертання (Рис.8). Такий вектор називають осьовим або аксіальним. Оскільки кутова швидкість – вектор, зміна кутової швидкості є також вектором. Отже, кутове прискорення – також вектор, який збігається за напрямом з вектором .
В разі, коли орієнтація осі обертання з часом не змінюється, вектор кутового прискорення при збільшення кутової швидкості збігається з вектором кутової швидкості. При зменшенні кутової швидкості напрями векторів кутового прискорення і кутової швидкості протилежні. Запишемо співвідношення (31)-(34) у векторній формі. Для цього розглянемо радіус обертання точки як вектор, напрямленій від осі обертання. На основі означення векторного добутку (лекція 0.1):
На Рис.8 показано розташування векторів , , , , , . Знак мінус у формулі (38) вказує на те, що нормальне прискорення напрямлене по радіусу до центра. Введення векторів кутової швидкості і кутового прискорення є доцільним також тому, що у разі, коли тіло одночасно бере участь у двох обертаннях, його результуюче обертання характеризується саме цими векторами, які дістанемо завдяки додаванню за правилом паралелограма.
Обертання характеризується також періодом обертання і частотою обертання . Період обертання – час, протягом якого тіло робіть повний оберт навколо осі обертання, а частота (лінійна частота) – кількість обертів, які здійснює тіло за одиницю часу. Між періодом і частотою обертання існує простий зв’язок:
| = | (39) |
Оскільки за період тіло здійснює повний поворот на кут = :
Рекомендована література:
1. Савельев И.В. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1987. – 432 с.
2. Бушок Г.Ф., Левандовський В.В., Півень Г.Ф. Курс фізики. 1 кн. Фізичні основи механіки. Електрика і магнетизм. – К.: Либідь, 2001. – 448 с.
3. Кучерук І.М., Горбачук І.Т. Загальна фізика. 1 кн. Фізичні основи механіки. Молекулярна фізика і термодинаміка. – К.: Вища шк., 1995. – 431 с.
4. Зисман Г.А., Тодес О.М. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1974.
5. Гершензон Е.М., Малов Н.Н. Курс общей физики. Механика. – М.: Просвещение, 1987. – 307 С.
6. Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. Т.1.– М.: Мир.
7. Киттель Ч., Найт У., Рудерман М. БКФ. Механика. – М.: Наука, 1975. – 480 С.
8. Детлаф А.А., Яворский Б.М. Курс физики. – М.: Высш. шк.., 1989. – 608 с.
9. Кузьмичев В.Е. Законы и формулы физики. Справочник. – Киев: Наук. думка, 1989. – 864 с.
10. Иродов И.Е. Основы классической механики. – М.: Высш. шк.
11. Голдстейн Г. Классическая механика.
12. Савельев И.В. Курс физики. В 3-х томах. Т.1. Механика. Молекулярная физика.– М.: Наука, 1989. – 352 с.
Поиск по сайту:
(PDF) Сейсмическое районирование южного склона Большого Кавказа по фрактальным параметрам землетрясений, напряженному состоянию и скоростям GPS
ISSN 10693513, Известия, Физика твердой Земли, 2013, Том. 49, No. 4, pp. 554–562. © Pleiades Publishing, Ltd., 2013.
Оригинальный русский текст © Кадыров Ф.А., Гадиров А.Г., Гадиров Г.Р. Бабаев, С. Агаева, С. Мамедов, Н. Гаражёзова, Р. Сафаров, 2013, опубликовано в «Физике земли», 2013, № 4,
с. 111–119.
554
ВВЕДЕНИЕ
Территория Азербайджана находится в зоне
активного столкновения двух континентов – Африканского и
Евразийского (Маккензи, 1972; Зоненшайн, Савош
олов, 1979; Зоненшайн, Кузоненшайн, , и Натапов, 1990;
Сенгор, Горур, Сароглу, 1985; Филип и др., 1989;
1990). Тектонические реконструкции плит показывают, что
первичное столкновение Аравийской плиты с Евразийской плитой
продолжалось в интервале с 10–
,30 млн лет назад и до наших дней (Robertson, 2000; Allen,
Jackson, and Walker, 2004), а скорость северного движения Аравийской плиты относительно Евразии
оставалась почти постоянной на уровне около 20 мм
в год с момента начала столкновения (McQuarrie
и другие., 2003; Reilinger et al., 2006). Согласно этим реконструкциям
, Аравия переместилась от своего первоначального положения
на 200–600 км к месту, которое ранее занимала евразийская континентальная лито – сфера
. Это продолжающееся вторжение Аравии в Евразию
вызывает сжатие поверхности земной коры вдоль надвига
, который ударяет в восточно-западном направлении. Горизонт
смещения литосферы от зоны коллизии
происходит на правом боковом сдвиге
(McKenzie, 1972; Sengor et al., 1985; Джексон, 1992;
Reilinger et al., 2006; Кадыров, Мамедов, и
Рейлингер, 2008 г.). Эти региональные тектонические процессы
приводят к землетрясениям, которые исторически зарегистрированы на всей территории Кавказа.
Южный склон Большого Кавказа –
наиболее подвижный и сейсмически активный регион, где
скорости смещений достигают 5 мм в год. Большинство сильных землетрясений
, как правило, относительно мелкие,
слабые (10–15 км), что имеет на своей поверхности
проявлений.Сильнейшие землетрясения в пределах
южного склона Большого Кавказа произошли
до 1903 года в районе Шамаха-Исмаиллы
(1192, 1667, 1669, 1828, 1859, 1868, 1872 и 1902)
(Абич, 1862;
Землетрясения…
, 1962–1991; Мушё
Кетов и Орлов, 1893; Кулиев и др., 1968; Кондор
ская, Шебалин, Хроменецкая, 1977;
1989 Никонов, 1982; ; Султанова, 1986; Агамирзоев,
1987; Гасанов, 2003).
На сегодняшний день идентификация сейсмотектонических зон
опиралась только на анализ пространственного распределения плотности
эпицентров землетрясений
(Кулиев и др., 1968) без комплексного изучения
сейсмогеодинамических параметров. . Более тщательное исследование
по сейсмотектоническому районированию южного склона
Большого Кавказа было проведено Р.А. Агами №
зоев (1987). В этой работе сейсмотектоническое районирование
данной территории проводилось путем анализа ментальных и макросейсмических измерений прибором
, которые выявили многочисленные слабые и мелкофокусные сейсмические события
, пространственное положение стыков mac
.розейсмических полей и количественная оценка сейсмической активности
.В цитируемой работе Агамирзоев
выделил четыре сейсмически активных зоны: Закатала,
Огуз (Варташен), Шамаха (включая подзону Исмаиллы
) и Абшерон.
В данной работе мы анализируем скорости GPS, сейс
, фрактальные размерности землетрясений и
напряженное состояние земной коры для сейсмотектонической зоны
Сейсмическое районирование Южного склона Большого Кавказа
из фрактальных параметров землетрясений, напряженного состояния
и скоростей GPS
F.А. Кадыров, А. Г. Гадиров, Г. Р. Бабаев, С. Т. Агаева, С. К. Мамедов,
Н. Р. Гаражезова, Р. Т. Сафаров
Институт геологии Национальной Академии Наук Азербайджана, проспект Г. Джавида. 29а, Баку, Азербайджан
Поступила 10 мая 2012 г .; принята в печать 20 ноября 2012 г.
Реферат
– Путем комплексного анализа скоростей GPS, сейсмичности, фрактальных размерностей пространственного распределения
сейсмических эпицентров, механизмов очагов землетрясений и напряженного состояния земной коры четыре В пределах южного
склона Большого Кавказа выявлены сейсмические зоны
(Балакен-Загатала, Шеки-Габала, Шамаха-Исмаиллы, Апшерон).Предлагаемый метод может быть использован в качестве критерия при сейсмотектоническом районировании;
он также может быть полезен при оценке сейсмической опасности в зонах столкновения.
Ключевые слова
: сейсмичность, скорости GPS, напряженное состояние, Азербайджан, Большой Кавказ, фрактальные характеристики, сейс
мотектоническое районирование
DOI:
10.1134 / S1069351313040046
Robohub
Среди спикеров сегодняшнего вечера Society, Robots and Us в 18:00 по тихоокеанскому стандартному времени во вторник, 23 февраля, Генри Эванс, немой парализованный, основатель Robots4Humanity, и Аарон Эдсингер, основатель Hello Robot.Мы также поговорим о роботах для людей с ограниченными возможностями с адвокатом по вопросам инвалидности Адриана Маллози, основательница Puffin Innovations, и Дэниел Сейта, глухой робототехник. Событие бесплатно и открыто для всех.
В результате внезапного инсульта Генри Эванс превратился из технологического строителя Кремниевой долины в поиск технологий и роботов, которые улучшили бы его жизнь, жизнь его семьи и опекунов, как основатель Robots4Humanity . С тех пор Генри побрился с помощью робота PR2 и разговаривал на сцене TED с Чадом Дженкинсом в программе «Подходящий технический луч».Теперь он работает с Аароном Эдсингером и Stretch Robot, который является очень доступным домашним роботом и платформой для дистанционного управления.
Мы также будем слышать от Адрианы Маллози, адвоката по вопросам инвалидности и основателя Puffin Innovations , стартапа вспомогательных технологий, принадлежащего женщинам, с разнообразной командой, ориентированной на разработку решений для людей с ограниченными возможностями, позволяющих вести более инклюзивную и независимую жизнь. Команда Puffin Innovations стремится уравнять правила игры для людей с ограниченными возможностями с помощью интеллектуальной вспомогательной технологии (SAT).SAT включает в себя подключение к Интернету вещей, машинное обучение и искусственный интеллект, чтобы обеспечить максимальный доступ с максимальной легкостью. Настраивая все, что они делают, от пользовательских интерфейсов до наших портативных, надежных и доступных продуктов, Puffin Innovations будет использовать свою интеллектуальную вспомогательную технологию для предоставления столь необходимых решений, к которым так стремилось сообщество инвалидов.
Это продолжение нашего ежемесячного исследования инклюзивной робототехники от CITRIS People and Robots Lab при университетах Калифорнии в партнерстве с Silicon Valley Robotics.19 января мы обсудили разнообразие с приглашенными докладчиками доктором Мишель Джонсон из лаборатории GRASP в UPenn, доктором Ариэль Андерс из женщины в робототехнике и первым техническим специалистом в Robust.ai, Алкой Роем из The Responsible Innovation Project и Кенечукву К. Мбанези и Кения Эндрюс из Black in Robotics, дискуссию модерировали доктор Кен Голдберг, художник, робототехник и директор CITRIS People and Robots Lab, и Андра Кей из Silicon Valley Robotics.
Вы можете увидеть полный плейлист всех разговоров Society, Robots and Us на YouTube-канале Silicon Valley Robotics .
РАСШИФРОВКА ПЕРВОГО ОБСУЖДЕНИЯ ИНКЛЮЗИВНОЙ РОБОТОТЕХНИКИ (из видео прямо выше)
Андра Кей 0:05
Итак, добро пожаловать всем. Добро пожаловать в наше первое общество роботов и нас в 2021 году. И я с нетерпением жду обсуждения, которое поможет нам определить повестку дня для робототехники на 2021 год и далее. И я думаю, что очень важно, чтобы по мере появления наших технологий мы решали вопросы, касающиеся того, как они влияют на общество и как они могут иметь как положительное, так и отрицательное влияние на общество.Так что у нас прекрасные беседы. И мы начали проводить это мероприятие в первые дни эры COVID, и мы сосредоточились на том, что на самом деле это означает? Как робототехника и робототехники могут помочь в это время пандемий, и это был фантастический разговор, и мы решили, что пора расширить тему и начать говорить о таких вещах, как расизм в робототехнике, глобальные проблемы и способы их решения . Так что это одно из моих любимых мероприятий. И я рад видеть так много людей. Теперь, когда я присоединяюсь к нам, моя роль состоит в том, чтобы разогреть докладчиков и остальную часть обсуждения, я просто дам всем немного по хозяйству относительно того, как это будет развиваться.Я представлю каждого из выступающих, и каждый из них поделится с нами своими мыслями. Мы будем переходить от докладчика к докладчику, если у вас есть вопросы конкретно к одному из выступающих, задавайте их в чате, и я могу переадресовать вопрос, а затем мы начнем общую дискуссию, когда у каждого выступающего будет время выступить. А в общем обсуждении? Что ж, я с нетерпением жду возможности узнать, что такое инклюзивная робототехника? Зачем нам это нужно? Как нам это получить? И даже помимо этого? Какова повестка дня робототехники? На 2021 год? А дальше? Какие вопросы мы не думали задать, возможно, и, возможно, пришло время начать эти обсуждения.И в этом духе я хотел бы признать, что я и многие из нас находимся здесь, на землях людей алони, которые являются непризнанным племенем первых народов Калифорнии. И мне очень приятно видеть, как больше событий начинают признавать первых людей как часть того, как все происходит. Итак, я представил нас и рассказал о ведении домашнего хозяйства. Хочу немного сказать о наших спикерах. И мы начнем остальную часть обсуждения. И я все это вижу, потому что указал на событие, которое будет обсуждаться в чате, – весенний кружок учредителей ответственных инновационных лабораторий.Я также хотел бы сказать, что робототехника Кремниевой долины и женщины в робототехнике регулярно проводят мероприятия. Например, среди женщин-робототехников у нас есть еженедельный книжный клуб. И у нас есть слабое сообщество, где мы можем встречаться онлайн, а также есть местные отделения. Если вы хотите присоединиться к этому, я размещу ссылку в чате. Пожалуйста, перейдите к женщинам на robotics.org. И это не сайт ht, TP, это все еще сайт HTTP. Так что если вы не можете его найти, то причина в этом. Но если вы заинтересованы в регистрации, перейдите сюда.Робототехника из Кремниевой долины – организация, которую я не называю своей повседневной работой, хотя это также увлеченный проект, который может помочь вам, если вы занимаетесь робототехникой на любом этапе. И у нас есть сети наставников, у нас есть мероприятия, связанные с темами или с тем, чтобы помочь вам с вашим стартапом. И мне просто интересно, Кен, не могли бы вы сказать несколько слов о CITRIS, где Кен является директором лаборатории роботов, а также об исследованиях, проводимых там. Кажется, есть еще CITRIS Foundry.
Кен Голдберг 4:37
Благодарю вас, поэтому я хочу сказать, что нам действительно повезло, что мы сотрудничаем с вами в этом вопросе, и поэтому мне очень приятно работать с вами, и Citrus – это Калифорнийский университет, фактически организация государственного уровня который соединяется с кампусами. Они говорят, что Дэвис, Санта-Крус и Беркли, а миссия CITRIS означает, что центр является центром исследований информационных технологий в интересах общества. Таким образом, миссия этой серии, которую организует Андхра, очень согласуется с миссией центра.И моя инициатива в нем – это люди и роботы. Так что они действительно очень сильно связаны. И эта идея инклюзивной робототехники – это то, что мы очень рады развивать и расширять в грядущем году и в грядущие годы. Так что я очень ценю обсуждение, которое мы собираемся провести сегодня вечером, я действительно с нетерпением жду ваших мнений.
Андра Кей 5:35
Еще раз большое спасибо. И вы, наверное, заметили, что сегодня у нас фантастический состав выступающих, у нас есть Dr.Мишель Джонсон, которая находится в лаборатории захвата в новой ручке, на самом деле является директором лаборатории реабилитационной робототехники в лаборатории захвата и адъюнкт-профессором физической медицины и реабилитации. У нас есть доктор Ариэль Андерс, она первый технический специалист, нанятый в надежном искусственном интеллекте, а также член совета директоров женщин в робототехнике. У нас есть Алка Рой, основатель ответственного инновационного проекта, который работает над созданием восторга, доверия и интеграции в технологии и искусственный интеллект. Будем рады услышать об этом больше.Значит, у нас здесь нет порядка моих заметок. Затем у нас есть Кенни Чику Нова Ниси, робототехник. И мои записи сейчас полностью вышли из строя. и является членом организации Blacking robotics, и он сможет немного поговорить с нами, как и в робототехнике, о Кенни Эндрюсе, студенте магистра компьютерной инженерии в Университете Иллинойса, и о членском комитете бакалавриата черный в робототехнике. И, конечно же, Кен Голдберг, директор лаборатории роботов в Citrus, и выдающийся Уильям С.Флойд-младший, заведующий кафедрой инженерии в Калифорнийском университете в Беркли, и он не только робототехник, но и художник, и мне нравится междисциплинарный подход, который привносит в дискуссию. И теперь, когда от меня больше ничего не было, я думаю, что мы дали всем нападающим время присоединиться к разговору, я хотел бы представить доктора Мишель Джонсон.
Доктор Мишель Джонсон 7:46
Спасибо, Андра. Спасибо всем за участие. Меня очень заинтриговало название, включающее робототехнику. Что это такое? Почему мы этого хотим? И что нам нужно сделать для этого, и, пока я размышлял, в первую очередь пришло на ум название «Чистые мысли», я подумал, что инклюзивная робототехника означает разработку роботов, отражающих разнообразие общества с точки зрения культуры и расы, как первое. мысль.Вторая мысль заключалась в том, что инклюзивная робототехника для меня означает создание роботов, которые можно использовать во всех типах сред с ограниченными ресурсами в условиях высоких ресурсов, в странах с высоким уровнем доходов и странах с низким и средним уровнем доходов, которые приносят пользу всем типам людей в различных социально-экономических условиях. статус. И не только в США, Великобритании или Европе, но и во всем мире. Так что это две, две мысли, которые действительно присутствовали. Со мной, когда я думал об этом, я хотел просто немного расширить эти две мысли и немного объяснить, что я имею в виду под этим.Итак, вернемся к первой идее, что мы должны думать о разработке роботов, отражающих разнообразие общества с точки зрения культуры и расы. Я, вы знаете, когда я работаю в сфере здравоохранения, и моя докторская степень находится во мне, и я давно думал о разработке роботов для людей с ограниченными возможностями, и, как мы предполагаем, роботы позаботятся о нас и воспринимают как некую помощь нашим клиницистам, старшим и людям в целом. Я думаю, что именно здесь нам действительно нужно начать думать о том, как мы их проектируем, как мы обучаем их использованию ИИ и их функциональным целям? Пара примеров того, почему это важно.Недавно я разговаривал с коллегой о его программе для распознавания лиц. И кое-что, что он сказал мне, поразило меня, он сказал: «О да, вы знаете, нашему программному обеспечению для распознавания лиц действительно трудно обнаруживать людей с более темной кожей?» И я подумал: «Хорошо, значит, мы – ИИ, вот как ИИ обучается». Итак, вы знаете, эта идея, что когда мы обучаем некоторые из наших систем, они есть, они, они обучаются, может быть, недостаточно на разных людях. Но тогда они не могут нормально функционировать при встрече с разнообразием людей, с которыми мы сталкиваемся.Это пример того, что я имею в виду, говоря о том, что они действительно думают о разнообразии общества с точки зрения культуры и расы. Еще одна мысль: недавно в моей лаборатории мы говорили о дизайне социальных роботов, думали о роботах для детей с ограниченными возможностями и занимались удаленным телездравоохранением. И одно из наших обсуждений было: как сделать так, чтобы этот робот, когда кто-то смотрит на него, может видеть себя в партнерстве с ним, и они автоматически не предполагают, что этот робот белый или этот робот? – это любая конкретная раса или цвет кожи, но они могут фактически сотрудничать с системой.Итак, мы говорили о разработке робота, который можно рассматривать как мультикультурный. Фактически, мы выполнили с моим классом упражнение, которое я преподавал прошлой осенью, о том, чтобы просить их взаимодействовать с роботом и спрашивать их о проблемах разнообразия, пола и расы, а также о том, порождает ли взаимодействие робота с роботом какие-либо из них. эти мысли. Так вот, я думаю, что нам нужно лучше поработать над включением разных людей в наш процесс разработки в обсуждение того, что является идеальным.Еще один анекдот. В вышедшей статье говорилось, что у роботов-социальных роботов должны быть глаза с учеником. И когда вы смотрели на раздел сообщений, большинство людей, которых они опрашивали, были белыми, и у них были голубые глаза или глаза, у которых вы видели отчетливый зрачок. И поэтому я подумал: “ Хорошо, ну конечно, тогда это имеет смысл, что теперь ты собираешься сказать, что этот робот должен иметь тебя, ученик, потому что множество людей, которым ты служишь, вот что они привыкли видеть, а если вы служите папе, знаете, людей с более темными глазами или карими, но вы не увидите четкого зрачка.Так что это не будет иметь большого значения. Это еще один анекдот о том, что нам, как ученым и разработчикам, нужно быть осторожными, чтобы действительно учитывать, с кем мы разговариваем, чтобы мы не были, и это была своего рода хорошо воспитанная статья. И я думаю: а почему никто не задал этот вопрос? Может быть, потому что, вы знаете, я думаю, что ответственность лежит на дизайнере и на человеке, разрабатывающем его, чтобы убедиться, что их, их население, которое они опрашивают, отражает этот кросс-культурный и гендерный аспект.И я думаю, если мы это сделаем, мы увидим более инклюзивных роботов, а их у нас не будет. По крайней мере, у нас будет меньше анекдотических историй, на которые я указываю. Второй момент, касающийся низких роботов, которые должны быстро использоваться всеми, – это результат некоторой работы, которую я действительно увлечен доступными роботами в глобальном здравоохранении. Потому что, оглядываясь назад на роботизированную терапию, терапию Сары и системы, которые мы разрабатываем, я искренне нахожу это. Они довольно дорогие и пока еще не проникли в страны с низким и средним уровнем дохода, с точки зрения инсульта, 80% инсультов и функциональных нарушений, которые возникают в результате, происходят за пределами стран с высоким уровнем дохода.Таким образом, существует это несоответствие с точки зрения вот этой технологии, которую мы доказываем, чтобы, возможно, поддержать в областях с ограниченными ресурсами, недостаточным количеством врачей, где вы могли бы использовать технологии для поддержки восстановления после инсульта или поражения верхних конечностей. Но все же мы не смогли проникнуть в эти области, потому что системы слишком дороги. Я имею в виду, что моя лаборатория была увлечена тем, как мы разрабатываем системы, которые не только эффективны, но и доступны по цене и могут использоваться в условиях ограниченных ресурсов.Так что это как бы мои две вещи. И я думаю, что больше из нас должны думать об этих вещах. И я вижу, что иногда мы думаем о том, что все лучше, лучше, лучше, круче и круче, но трансляция этой технологии в сообщества во всем мире, я думаю, отсутствует. Это мой второй пункт о робототехнике. Я остановлюсь на этом, Андра, я думаю, что я высказал свои основные мысли.
Андра Кей 15:12
Нет, это было отлично. И я думаю, что это были очень четкие моменты.Я сам написал несколько вопросов. Если у кого-то еще есть вопросы, касающиеся конкретно Мишель, или вопросы по темам, которые она подняла, вы можете оставить их в чате, и мы обязательно к ним ответим. Я с нетерпением жду возможности услышать, под каким другим углом обсуждают, что такое инклюзивная робототехника? И как мы получим то, что собираемся раскрыть сегодня вечером. Итак, без лишних слов, я хотел бы представить доктора Ариэль Андерс, которая является первым техническим специалистом, нанятым в надежном искусственном интеллекте и членом совета женщин в робототехнике.
Д-р Ариэль Андерс 15:58
Итак, это был действительно отличный доклад, я рад попытаться продолжить, думаю, у меня есть некоторые похожие идеи. И я очень признателен Мишель за ваши комментарии, откуда мы знаем, что мы продолжаем раздвигать границы того, что могут делать роботы, но они не обязательно обращаются ко всем. Итак, для начала я просто хочу поблагодарить вас за то, что вы пригласили меня поговорить и поделиться некоторыми своими идеями об инклюзивной робототехнике. Если вы видели некоторые из моих недавних презентаций, я пытался выработать привычку представляться и рассказывать немного о себе и контексте.И я думаю, что для этого выступления самым важным, важным здесь является то, что я человек. И я думаю, что когда мы думаем об инклюзивной робототехнике и вопросах, которые ондра просил у выступающих поделиться своими мыслями, это должно исходить от этой части нашего человечества. И это три вопроса, знаете, что такое инклюзивная робототехника? Зачем нам это нужно? И что нам для этого нужно сделать? Я думаю, что мои ответы сегодня, вы знаете, я немного взволнован, что мы увеличили масштаб, и похоже, что это записано, потому что мне любопытно посмотреть, знаете ли, что я думаю через десять или около того на некоторые из моих мыслей здесь.И я думаю, что мы продолжим расти и учиться. И просто повторюсь об этом процессе. И, вы знаете, нам действительно следует начинать эти дискуссии все чаще и чаще, особенно от таких людей, как я, которые действительно, как правило, не так много работали над идеей взаимодействия человека с роботом, большая часть моей предыдущей работы была в программировании роботов. делать новые возможности. Так что я очень рад поделиться своими идеями и своими мыслями о первом впечатлении. И для начала, когда я думаю о том, что такое инклюзивная робототехника? Я думаю, что значит быть инклюзивным? И мое определение инклюзивного – это принадлежность.Таким образом, инклюзивная робототехника создает роботов, которые принадлежат нашему миру. Я думаю, что принадлежность этого слова ко мне имеет большое значение для того, какой тип роботов будет иметь. Извините, я думаю, что моим собакам тоже очень понравилась эта идея. Надеюсь, вы, ребята, все еще понимаете, что мы попытаемся поговорить с ней о том, что значит принадлежность робота? Он должен быть безопасным, это должен быть робот, которому комфортно рядом с нами, понимаете, нам должно быть комфортно иметь его или рядом. Мы хотим быть уверены, что роботы принадлежат, вы знаете, они принадлежат, они, вероятно, не причиняют вреда людям, потому что исключают других.Я думаю, что возникает вопрос о правильном использовании робототехники, как и в соответствии с тем, что сказала Мишель, вы знаете, это не должно быть чем-то, что отталкивает больше людей, это должно быть что-то, что не использует все наши ресурсы, это должно быть что-то, что доступный. И для меня это тоже должно быть то, чего хочет общество. Нам нужны надежные роботы, которые работают, и мы хотим, чтобы они были рядом. И самое главное, именно в таком круговом определении. Когда я говорю о людях, я действительно имею в виду всех людей.И когда я думаю об этом, знаете, роботы, которые заслуживают доверия и безопасны, и они работают, мы хотим, чтобы они были рядом. Мне. Логично, что нам нужны такие роботы. Я думаю, что вопрос действительно в том, зачем нам это определение? Включить всех. И я, честно говоря, не могу вам на это ответить. Но я могу обратиться к эксперту, у Майи Анжелу есть замечательная цитата о разнообразии, и что это делает богатый гобелен. И мы должны понимать, что все нити гобелена одинаковы по стоимости, независимо от их цвета.Я думаю, что когда мы думаем о робототехнике, невероятно важно думать о создании роботов для маргинальных групп. Это не только для людей, которые могут за них платить. При этом говорится: «Как мы этого добьемся», и я, честно говоря, не знаю, как, но я думаю, что мы должны следовать принципу «ничего о нас» без нас. А это означает, что мы должны постараться, чтобы у нас была разнообразная демографическая группа, создающая роботов, нам нужны люди из всех слоев общества, иначе мы ни за что не добьемся этого. Итак, еще одна идея, которую нужно иметь в виду, продолжая развивать нашу робототехнику, – это помнить, что все мы люди.И я хочу поделиться здесь небольшой личной историей. Когда я был студентом, у меня была возможность представить свои исследования на africamp. И нашим основным докладчиком была Майя Анжелу, и это невероятно, что я увидел ее. И я не могу перефразировать, я даже не могу точно резюмировать то, что она сказала. Но она действительно подтвердила, что все мы люди. И я думаю, что это то послание, которым я хочу поделиться с вами, когда мы собираемся сделать нашу робототехнику более инклюзивной. Это своего рода моя короткая короткая презентация о том, что я считаю инклюзивной робототехникой.
Андра Кей 21:58
Спасибо. Хорошо, это были отличные и красивые цитаты моей Майи Анджелоу. И я получаю так много богатого материала из дискуссии в чате о том, что такое мультикультурный робот, которого вырастила Мишель? И вы знаете, вы очень ясны, ничего о нас без нас. И, знаете, я думаю, у нас есть много вопросов, связанных с упоминанием ответственности за производство роботов. И я думаю, что все хотят, чтобы за это отвечал кто-то другой.И довольно часто мы достигаем производства роботов с очень большими проблемами на каком-то этапе производственного процесса. Ничего не происходит, совместно работая над соответствующей робототехникой. Так что я сам начинаю думать об этом процессе. И вы уже знаете, так что спасибо вам обоим за то, что вдохновили нас там. Что мне нужно сделать, так это представить нашего следующего спикера. Алка Рой – основатель проекта ответственных инноваций. И я думаю, что в настоящее время вы также посещаете факультет в Беркли.Хорошо.
Алка Рой 23:29
Да, привет. Я просто пытался понять, как поделиться своим экраном на моем новом компьютере. Иногда чем проще, тем лучше. Так что я, дайте мне знать, если это сработает. Нет, не работает. Так. Отлично. Так что я. Прежде всего, спасибо, что пригласили меня на это. На самом деле я был более взволнован, услышав то, что все собирались сказать, чем то, что собирался сказать я. Я определенно не делаю роботов, и я думаю, что поздравляю вас с приглашением постороннего человека, чтобы он прокомментировал это.Но у меня на этот счет много мнений. Почему бы нет? И я думаю, что все больше и больше людей должны иметь свое мнение по этому поводу. Так что я действительно пытаюсь понять, смогу ли я по-прежнему поделиться своим экраном, потому что я хотел поделиться с вами структурой, которая, я надеюсь, мы подумаем о моей провокации сегодня вечером, совсем другой. Потому что, когда меня впервые пригласили и я услышал про инклюзивных роботов, я сказал, что не хочу посещать это мероприятие, потому что я не уверен, что робот должен быть инклюзивным, и что это на самом деле означает.И поэтому я просто думал, думал и думал об этом. И я, потому что я действительно считаю, что некоторые вещи следует исключить. Итак, позвольте мне объяснить, что я имею в виду под этим. Я работаю или у меня есть система ответственных инноваций. И это снова, я говорю, что в 1% случаев я могу просто поделиться своим экраном, или вы должны иметь возможность сделать это на зеленом экране общего доступа в нижней части экрана? Правильно. Так что мои настройки безопасности не позволяют этого. Итак, что я вижу. Дай мне еще секунду, если можно, я просто поговорю с ней.Хорошо, я помещу свою ссылку на сайт. И у нас будет другой раз, чтобы поделиться этим. Но так что я основатель системы ответственных инноваций. А до этого я был в инновационном центре в Пало-Альто, где мы делали много того, о чем я собираюсь рассказать. И то, что произошло со мной, было то, что я стал концом 5g, AI и всего остального. Итак, мы обеспечивали все, что вы знаете, мобильность, возможность погружения, робототехнику. И посреди всех этих дискуссий я обнаружил, что многие голоса пропали, и это были голоса сообщества или людей, или даже когда были задействованы города, обычно приходил их технический директор, а не люди думали о влиянии. общества.И я продолжал поднимать вопрос, поднимая вопрос, пока я не стал настолько громким для себя, что мне пришлось почувствовать, что мне нужно сделать перерыв или две стороны. Итак, я вышел с арены и сделал перерыв. И весь этот мир произошел с COVID, который был действительно интересным местом для размышлений для всех нас. Одна из вещей, над которой я работал в прошлом году, – это структура ответственных инноваций, которая похожа на вложенную три на три на три, поэтому я надеялся, что смогу показать вам визуализацию, но просто идите со мной.И я постараюсь создать его для вас. Итак, первое, что есть, это провокация для износа робототехники, и я действительно очень рад узнать, что вы собираетесь об этом подумать, и как вы собираетесь не соглашаться со мной, и как вы собираетесь Чтобы сказать мне, что я ошибаюсь, я считаю, что нам нужно по-другому думать об заинтересованных сторонах. Итак, у нас есть люди, о которых все говорят, и действительно люди, а не клиенты, не клиенты, не знаете, люди, тогда у нас есть планета в окружающей среде, физика, наши законы, вы знаете, все эти вещи.Третий участник – технологии, вещи. Я называю это людьми планетами. И причина, по которой я выделил это как отдельную заинтересованную сторону, заключается в том, что я думаю или моя провокация заключается в том, что мы разрабатываем технологии, которые так проблематично включают роботов и чат-ботов. А цифровые двойники – это потому, что мы не разделяем людей и вещи. Потому что мы пытаемся строить вещи по нашему собственному образу или образу чего-то живого. Итак, мы берем неодушевленную вещь и создаем ее в этом изображении, мир анимации полон этого.И это вызывает у нас большое недоумение. Поскольку мы передаем наши чувства, мы переносим наши предубеждения, мы переносим наше замешательство на эти неодушевленные предметы. А теперь так много исследований, и люди, понимаете, что-то чувствуют в отношении робота, который они создали роботом, чтобы вроде как расчистить минное поле. Но когда они видят, что этого робота взрывают, они останавливаются и убирают робота, потому что чувствуют, что этот робот делает больше, чем он был разработан. Есть причина создавать социальных и чутких роботов.Я понял. Но я думаю, что в этом процессе мы создаем девочек-подростков, мы создаем женщин в качестве наших служителей, и мы просто увековечиваем остроту, которую мы можем отделить. Поэтому моя провокация заключается в том, почему бы не создавать роботов – это вещи, полезные вещи, но не в нашем имидже, не в нашем голосе. А то, что мы не передаем, вы знаете, просто выглядит как вещь. И мы относимся к этому как к очень полезной вещи, которая общается и помогает нам, и это технологии. Так что это, знаете ли, основная провокация для меня, заинтересованных сторон.Другие аспекты этой системы ответственных инноваций включают ценности открытости и безопасности, которые являются конфликтующими ценностями, но, но оба необходимы, восхитительны и заслуживают доверия, а также инклюзивны и надежны. И их включение касается людей, идей и типов людей. И причина, по которой я говорю приятный и заслуживающий доверия, заключается в том, что всякий раз, когда мы говорим об ответственности, вы поступаете правильно. Мы можем голосовать как обычно, мы чувствуем, что должны быть очень серьезными и скучными. В то время как я думаю, что это очень полезная часть дизайна робототехники.светлый для нас, и мне нравится то, что сказала Мишель. И я думаю, что Ариэль сказал о том, что мы всегда смотрим в будущее и чувствуем, что должны гоняться за последними и лучшими. Но нам есть чему поучиться на наших старых технологиях выветривания и сделать их доступными во всем мире. Так что я надеюсь, что в какой-то момент мне удастся поделиться с вами этим фреймворком. Но это мои провокации для этого разговора. Я хотел бы услышать, что другие люди говорят об этом.Так что спасибо тебе.
Андра Кей 30:33
Спасибо, Алка. И я заметил, что некоторые люди очень положительно относятся к тому, что вы там говорите. Я должен согласиться с тем, что хорошая структура дизайна состоит в том, чтобы не создавать чего-то, что увековечивает стереотипы, потому что мы действительно антропоморфизируемся, и это вызывает наши бессознательные предубеждения и стереотипы, и я предвижу еще несколько разговоров. Но я думаю, что пора представить Кенечукву Мбанези из студенческого комитета Black In Robotics.И вы в настоящее время, он в настоящее время защищает докторскую диссертацию по робототехнике в Вустерском политехническом институте в Массачусетсе. И я с нетерпением жду возможности узнать об этом больше от вас.
Kenechukwu C. Mbanesi 31:29
Хорошо, привет, извините, я просто пыталась провести здесь свой обмен. Дай мне одну секунду. Вы видите мой экран?
Андра Кей 31:47
Да. Выглядит хорошо.
Кенечукву К. Мбанези 31:49
Отлично.Да, большое спасибо за привилегию быть здесь и присоединиться к сегодняшнему разговору. Я, я получил много пользы, просто слушая то, о чем говорили предыдущие ораторы. Я хочу взять это обсуждение, несколько совмещая то, чем закончился Ариэль, о том, как один из способов достижения инклюзивной робототехники – это вовлечь в робототехнику людей из всех слоев общества. В течение долгого времени я был очень увлечен той мощью, которой обладают робототехника и технологии, чтобы обеспечить повышение качества жизни и социально-экономические выгоды для людей из малообеспеченных и недостаточно представленных сообществ, особенно на африканском континенте.И в этом-то и заключается моя страсть. И вы это видите, я вижу. Я вижу, что эксклюзивность, противоположная инклюзивности, вызвана двумя вещами. И могло быть и больше, но в моем понимании это две вещи. Один из них – дискриминация. Другими словами, о равных возможностях. Во-вторых, ограничение. Более-менее при равном доступе, верно. И моя страсть действительно заключается в решении проблемы равного доступа. И как я себе это представляю, используя образование. Правильно? Итак, как мы можем привлечь больше людей, которые в противном случае не сидели бы за столом обсуждения и разработки робототехнических технологий, чтобы иметь возможность делать это, предоставляя им средства через образование.И мне выпала большая честь участвовать в интересных проектах с этой целью, и я хотел бы поделиться с вами некоторыми из них. Первый проект – математика и естественные науки для стран Африки к югу от Сахары. Этот проект был поддержан Всемирным банком, и наша смелая цель заключалась в том, чтобы запустить программу обучения инструкторов по всему континенту, чтобы повысить квалификацию учителей для преподавания математики, естественных наук и робототехники и действительно понять их взаимосвязь. Итак, как наука и математика вдохновляют людей заниматься инженерией и робототехникой? Я думаю, что если бы мы могли вдохновлять и обучать учителей, ну, они, в свою очередь, обучали бы и вдохновляли студентов.Правильно. Итак, мы начали это в 2016 году. И мы смогли сотрудничать с государственными образовательными учреждениями на континенте, чтобы проводить учебные программы лично и виртуально в нескольких африканских странах. И просто чтобы добавить сюда плагин, одна из основных проблем, с которыми мы столкнулись, и я знаю, что в этом проекте мы действительно все еще справляемся, – это доступ к недорогим образовательным робототехническим комплектам в больших масштабах. Нам очень повезло, что робототехника Vex подарила пару детей. Но помимо этого, мы по-прежнему видим в этом серьезное препятствие на пути к тому, чтобы студенты и учителя получали доступ к детям, которые действительно могут помочь им учиться и участвовать.Второй проект называется bad for kids или co bad – это общедоступные коллаборативные роботы. И этот проект был поддержан Институтом передовой робототехники для производства здесь, в США. И этот проект действительно был разработан для борьбы с нынешней нехваткой квалифицированных производственных талантов в США. И особенно пытаюсь решить эту проблему инклюзивным образом, верно. Итак, что мы действительно делаем, так это плыть вверх по течению, вдохновлять и обучать учеников средних и старших классов, особенно из недостаточно представленных слоев общества, быть увлеченными робототехникой и увлеченными передовым производством, проводя их через несколько недель после школы, так как школьная программа, в которой мы учим их программировать совместных роботов, в основном роботов с пользовательским интерфейсом, которые вы можете видеть на экране, и на самом деле учим их, как изготавливать элементы с помощью станков с ЧПУ, станков и прочего.И действительно, наше видение заключалось в том, что эта практическая возможность обучения на основе опыта вдохновит их на то, чтобы они были увлечены этим и помогли им попасть в эти программы или в колледж, и действительно сохранить это, чтобы увеличить удержание, чтобы они действительно могли пойти и заняться робототехникой в будущем. И последний проект, в котором я совсем недавно участвовал, и он очень дорог моему сердцу, это общеафриканские соревнования по робототехнике. Он начался в 2015 году, очень маленький, но сейчас он, вероятно, превратился в крупнейшее соревнование по робототехнике на континенте.И действительно, он был разработан с вдохновением от первых роботов, если вы знакомы с этим здесь, в США, на самом деле с целью вдохновить следующее поколение робототехников на континенте. И мы видели очень активное участие и значительное влияние на то, как студенты мотивированы не просто быть потребителями этой технологии, но и иметь уверенность в том, что они могут быть частью производителей технологии, верно, они могут быть частью людей, которые собственно развитие этой технологии. И в этом, естественно, моя страсть.Таким образом, это соревнование проводится каждый год, и мы собираем учеников от средней школы до студентов колледжа, и, знаете, чтобы запрограммировать роботов, чтобы они соревновались друг с другом, и просто по-настоящему вдохновляют их. Итак, на самом деле, резюмируя, я, я очень твердо верю в будущее инклюзивности. И во-первых, я к этому стремлюсь, поскольку, как показывает эта короткая презентация, я работаю над тем, чтобы предоставить молодым людям, особенно людям из недостаточно представленных сообществ, доступ к образованию, которое и развитие навыков, которые позволяют им не только учиться. таблица, где они могут разрабатывать технологии разнообразным образом, но при этом извлекать выгоду из дивидендов технологии.Спасибо.
Андра Кей 38:11
Большое спасибо, Кенечукву, я … с нетерпением жду возможности узнать больше обо всех этих инициативах. В частности, я думаю, что Ари поднял интересный вопрос, может быть много образовательных инициатив, как мы можем максимизировать выгоду, а также доступ, а не раздробленный или фрагментарный успех. И я знаю, что открытая робототехника очень стремится демократизировать доступ к робототехнике, предлагая доступ к моделированию, чтобы обойти некоторые затраты, связанные с доступом к физическим роботам.Но, конечно, для этого нужен доступ в Интернет. И мы видим даже в Соединенных Штатах, что существует полный разрыв между теми, у кого есть доступ к Интернету для обучения. И те студенты, которые в течение последнего года действительно боролись из-за отсутствия доступа к Интернету. И я не знаю, какие шаги нам нужно предпринять. Думаю, мы обсудим это немного подробнее по ходу обсуждения. Но я хотел бы представить нашего следующего докладчика, Кению Эндрюса, магистранта компьютерной инженерии в Университете Иллинойса и члена комитета студентов бакалавриата по черным и робототехнике.
Кения Эндрюс 39:41
Хорошо, спасибо вам большое. Здравствуйте все. Я очень рад быть здесь. И я не принесла слайдов, так что я просто собираюсь, знаете, говорить. Итак, сначала я расскажу немного о своем прошлом и о том, где я вписываюсь в пространство, а затем я перейду к теме. Итак, я учусь на первом курсе магистратуры и живу в этой сфере, где мы создаем алгоритмы, верно? И это те вещи, которые являются свойствами роботов принимать решения, верно.Итак, это то пространство, в котором я нахожусь. Я в своих исследованиях фокусируюсь на справедливости машинного обучения. И в этой области я, моя страсть, занимаюсь алгоритмической справедливостью, алгоритмической предвзятостью и принятием решений. Итак, мой текущий проект направлен на справедливое распределение вакцинации от COVID-19 среди уязвимых групп населения в штате Огайо. А сейчас мы смотрим на разные показатели, пытаемся построить разные модели. Итак, некоторые из вещей, которые мы как бы обсуждали, например, должны ли быть равные показатели госпитализации для уязвимых и неуязвимых людей? Будет ли это справедливо? Или было бы более справедливо, если бы в каждом, например в переписном участке или, вы знаете, центре, было бы распределено одинаковое количество вакцин? Итак, и нам приходилось обходить такие вещи, как недоверие между историческими, знаете ли, из-за исторической несправедливости и тому подобного, как это порождает недоверие и меньше вакцин и как это влияет на распространение.Надеюсь, это дает вам небольшой контекст того, откуда я пришел. Итак, когда я впервые увидел инклюзивную робототехнику, я подумал, во-первых, ну, ну, это, знаете ли, загруженный список тем. Итак, давайте разберемся с некоторыми определениями. Итак, сначала я хотел посмотреть, что такое робот? И является ли программируемая машина, которая выполняет эту задачу, с помощью человека или без него? А потом я хочу посмотреть, ну что такое инклюзия? Вот здесь у меня начались некоторые проблемы, потому что у нас нет реального согласия относительно того, как выглядит инклюзивность.И это не потому, что, знаете, по разным причинам, правда? Типа, может быть, это похоже на то, что вы не согласны с чьим-то образом жизни, поэтому вы не хотите, включать их в свои дела или, знаете, я думаю, что мне нужно больше, потому что я делаю больше, я больше работаю, верно . Так что это создает, знаете ли, эти предубеждения вокруг того, должны ли люди быть или не должны быть. Итак, я пошел в Оксфорд, и некоторые из их определений не исключают какую-либо из сторон или групп, участвующих в чем-либо, и стремятся предоставить равный доступ к возможностям и ресурсам для людей, которые в противном случае могли бы быть исключены.Итак, объединив эти две вещи, я подумал о том, что мы хотим иметь роботов, которые принимают разумные решения для достижения, знаете, разных целей в этом мире, верно? И дело не только в том, что мы хотим, чтобы они что-то делали, а вы хотите, чтобы они делали это хорошо, верно. Так что, если они не могут их делать, тогда, может быть, им вообще не стоит этого делать? Вот о чем мы говорили чуть раньше. Итак, этот анализ того, делают ли роботы что-то хорошо, должен охватывать, вы знаете, справедливы ли они, справедливы ли они в принимаемых ими решениях? И чтобы понять это, нужно начинать с самого начала, с самого начала алгоритма, потому что, знаете, в конце есть несколько этапов, на которых люди смотрят на справедливость, и один из них находится на В конце концов, у них все результаты в конце выходят хорошо.А что насчет того, когда вы принимали решение? Так что это еще одна схема справедливости, например, где они были между этапами, между хорошими решениями, когда они опасаются, что я хороший. Так что я хочу, чтобы вы, ребята, меня немного слышали. Я хочу поговорить о нескольких определениях справедливости. Надеюсь, это может внести некоторый контекст в то, где мы находимся. Так хорошо. Итак, некоторые определения справедливости – это неосведомленность. Вот тогда мы исключаем разные атрибуты людей. Таким образом, по данным, даже если они есть, мы знаем, что они есть, мы не смотрим на них, мы просто игнорируем их.И это может быть действительно опасно. Потому что, если вы игнорируете эти вещи, вы игнорируете историческую несправедливость, которая с этим связана. Правильно? Итак, если вы игнорируете тот факт, что кто-то является чернокожим или смуглым человеком, то вы игнорируете несправедливость, с которой им пришлось столкнуться, чтобы добраться туда, где они есть, и то, как это могло повлиять на то, что мы рассматриваем как их резюме. Правильно. Так что, может быть, они вам не подходят. Но если мы, если мы, вы знаете, учтем вещи, которые повлияли на их резюме, тогда мы сможем начать видеть, вы знаете, на самом деле, может быть, они квалифицированы или, может быть, даже более квалифицированы, чем кто-то из ваших знакомых, у кого есть похожее или равное резюме.Еще одно определение справедливости – демографический паритет. И лучше всего, если вы посмотрите, имеют ли все демографические данные и набор данных одинаковые результаты, верно, например, если белые, черные, азиатские, индийские люди принимаются с одинаковой скоростью или отклоняются с той же скоростью, и группировка демографические данные вместе, могут полностью отменить, полностью отменить другую демографическую группу, частью которой они могли бы быть, верно. Так что это не только гонка. А как насчет вас? О, они низкие, они высокие. А как насчет возраста, знаете, и тому подобных вещей.Так что вы можете полностью игнорировать чужую часть его части его личности, если вы так сгруппируете их вместе, в этом заключается опасность. А еще есть что-то, называемое равными последними шансами. И если у вас есть квалификация, то вероятность того, что вас примут во что-либо, не меньше, чем у кого-то другого. И еще один – равенство возможностей. Таким образом, независимо от вашей демографической группы, вы одинаково квалифицированы, чтобы иметь что-то, как кто-то другой, или отвергать это, как кто-то еще. А еще есть предсказательная пародия.И тут это очень похоже на демографическую пародию. И это когда положительные ставки совпадают. Хорошо, наконец, я позабочусь о безопасности огнестрельного оружия. И, наконец, я откажусь от контрфактической справедливости. И это если результат для вас такой же. Если вы находитесь в этом мире, где вы находитесь, кто вы есть, по сравнению с тем, что вы знаете, если бы у вас был другой набор демографических данных. Так что вместо того, чтобы быть невысокой черной женщиной, я была бы белой женщиной, и мама, у меня будет такой же результат? Правильно? Итак, эти вещи важны, потому что, когда мы смотрим на робототехнику и решения, которые они продвигают, в том, какова ваша мера справедливости? Пойдем ли мы мимо, знаете ли, и какой из них наиболее подходит для нашего контекста, он меняется, он меняется все время.Так что мы должны быть очень осторожны. Эм, когда мы проектируем роботов и понимаем, в каком пространстве они будут? А с кем они будут работать? Извините, я читаю свои заметки одну секунду. Хорошо, да, мы хотим убедиться, что мы не продвигаем неравенство, а сводим его к минимуму или уменьшаем, верно. Итак, как мы можем сделать некоторые вещи, которые, я действительно думаю, нам следует сделать, это просто сделать шаг назад и замедлить темп, нам нужно посмотреть, где мы находимся прямо сейчас.И прийти к соглашению о том, как выглядит инклюзивность. И как только мы все сможем это подписать, нам нужно будет понять, как мы принимаем решения, потому что у нас даже нет четкого понимания этого. Нам нужно знать, знаете ли, что мы говорим о хорошем или о плохом? И почему мы так говорим? Если причина в том, почему это плохо, и, возможно, этого не должно быть в нашем дизайне, верно? Или причины, которые хороши, вы знаете, может быть, нам нужно наложить их друг на друга и сделать их еще больше, заставить их иметь большее значение.И еще один способ, после того, как мы это хорошо понимаем и развиваем хорошие вещи. Я думаю, что мы должны начать инвестировать, как и вы, возможно, вы, если вы разрабатываете что-то для сообщества или роботов. понять их борьбу, то, что на самом деле происходит, чтобы у вас было настоящее понимание. Вам нужно поддерживать такие организации, как Несби, верно? Национальное общество чернокожих инженеров или женщины в робототехнике, верно? поддержите их своими средствами, поддержите их своими знаниями, выскажитесь добровольно.Даже студенты рассказывают студентам о робототехнике, и вы знаете, как это выглядит. Но пока вы рассказываете им о робототехнике, отнесите их в афроамериканские музеи, отнесите в музеи Холокоста, покажите им, знаете, научите их историческим моментам, в которых мы не были такими справедливыми, мы не были такими просто мы не были такими инклюзивными, и как эти вещи могут повлиять на нашу жизнь, начать стипендию, ну, знаете, быть наставником. Да, это мои мысли. Так что большое вам спасибо. Я ценю вас, ребята.
Андра Кей 51:09
Большое спасибо, Кения, вы подняли большие вопросы. И было замечательно, что там есть определения. И что мне больше всего нравится, так это то, что вы вернулись к словам, начиная с алгоритма. И это как критически важно, так и крайне проблематично на данный момент. Потому что прямо сейчас робототехника стала разновидностью ИИ. А это означает, что федеральная политика в области ИИ включает робототехнику, это означает, что повестка дня строится вокруг обсуждения ИИ и этики ИИ.И это часто делается в робототехнике при полном незнании. И некоторые проблемы заключаются в том, что если речь идет только о робототехнике, тогда речь может идти только о безопасности, а не о прозрачности алгоритмов. Но в то же время, если речь идет в первую очередь об алгоритме, то в нем будет исключено воздействие физического робота. И у них просто совершенно другой и расширенный способ взаимодействия с нами в обществе. Итак, вы знаете, мне нравится, что вы начали с ИИ в этом обсуждении.И позвольте мне посмотреть, не захочет ли Кен сейчас выступить. И
Кен Голдберг 52:31
Спасибо. Хорошо спасибо. Я ценю это. Меня действительно вдохновили многие из этих обсуждений. И я также хочу воспользоваться моментом, чтобы признать, что сегодняшнее мероприятие зажато между двумя крупными событиями, по крайней мере, в Соединенных Штатах. Один из них – День Мартина Лютера Кинга, который мы отмечали вчера, а завтра – инаугурация. И это будет примерно через 15 часов, у нас будет новый президент нового министерства Соединенных Штатов.Чего я не знаю, что думают по этому поводу другие. Но я, например, очень, очень, очень этому рад. Я думаю, что это важно, потому что у нас есть возможность открыть новую главу в американской истории, которая, я думаю, повлияет на многие события в мире. Я думаю, как вы знаете, меня поразило то, что это Кения, я только что упомянул, что процесс вакцинации COVID будет очень интересным пересмотром нашего чувства инклюзивности. Потому что нам придется очень тщательно и глубоко подумать о том, как расставить приоритеты для вакцины.Мне было очень интересно, что пожилым людям и медицинским работникам, заключенным и лицам, находящимся в заключении, не без оснований уделяется приоритетное внимание. Но это очень интересно, потому что, знаете, они не часто не учитываются в наших приоритетах. И это заставило нас пересмотреть свое мнение. И я думаю, что по мере того, как станет доступно больше вакцин, нам придется очень внимательно подумать о том, как они будут внедряться, что приведет к повторной проверке. И я хочу отметить, что эта пандемия разбудила нас во многих отношениях.Пандемия 1918 года произошла 100 лет назад. И я размышлял о том, что слово робот было придумано в 1920 году, сразу после окончания пандемии, и я все еще пытаюсь осознать, что это был такой интересный контекст, через который они только что прошли. Мировая война и эта ужасающая угроза человечеству. И тогда драматург Карл Че в Чехословакии по сути придумывает историю о роботах, восставших против тоталитарного режима, который, по сути, заставлял их работать.Именно от этого слова произошло слово «робот». Итак, 100 лет спустя мы думаем, что думать о роботах в контексте нашей политической, экономической и социальной среды очень важно. И поэтому я думаю, что вопросы, которые были подняты здесь с самого начала, когда Мишель характеризовал, вы знаете, кто мы? Какое у нас определение? Потому что я думаю, что это так сложно осмыслить. Я имею в виду, что мы можем говорить о пожилом и детском возрасте как о своего рода инклюзивности.Да, это один очень важный фактор, есть еще один, о котором мы не говорили сегодня вечером, а именно пол и ЛГБТК, верно, есть все гендерные проблемы, которые вышли на первый план, фактически в этом году. И вопросы расы, я имею в виду, жизнь черных имеет значение. Я думаю, что бипок, сама идея думать по-новому, что привело к большому смещению внимания и приоритетов в действительно позитивном ключе.Я могу сказать вам, что черный цвет и робототехника, черный цвет и ИИ оказали большое влияние. В этом году, в процессе приема в Беркли, мы сейчас рассматриваем кандидатов, и нам уделяется много внимания.У нас больше соискателей, чем когда-либо прежде, больше чернокожих соискателей, чем когда-либо прежде. И на самом деле двое из них здесь. И я хочу сказать, что это замечательно, потому что они там есть. Что действительно важно, так это то, что мы, мы учим и обучаем преподавателей тому, что важно не просто смотреть на оценки, сколько статей они читают, но какова была их траектория? Итак, если студент приехал из, из невзгод, в маленькой деревне и в Африке, а теперь учится в, вы знаете, учится в Гринхэме? Что ж, в классах это огромная траектория.Я имею в виду, это означает, что они там, вы знаете, представьте, что им пришлось преодолеть, чтобы достичь этого. Так что подумайте об этом в отношении того, как вы оцениваете этого ученика. У них может не быть опубликованной статьи, но они находятся на определенной траектории, ничто не остановится. Правильно. Так что я думаю, что это действительно увлекательно. И это действительно мощное и важное время, которое я также думаю с точки зрения других, вы знаете, рас, о которых мы говорили, вы знаете, вы откроете сегодня ондру рассказом о коренных американцах и аборигенах, я думаю, что это действительно важно .Мы также рассматриваем латиноамериканцев, индийцев, хотя и весь спектр существующих рас. И языки, кстати, большая разница, исключающая многих людей, заключается в том, на каком языке они говорят. Знаете, во многих публикациях делается упор на английский. Но это очень сложно, потому что это не твой родной язык. Итак, у вас есть препятствие, которое нужно преодолеть, и то, как вы читаете и пишете, то есть нам нужно подумать о том, как преодолеть этот барьер, даже наш сегодняшний разговор на английском языке. И затем перевод, в настоящее время, некоторые из этих инструментов и ИИ, снова вступают в игру, собираются открыть эти двери, и я надеюсь, что их качество повысится, чтобы у нас был синхронный перевод.И, например, для людей с нарушениями слуха, имеющих возможность автоматического перевода, скрытые субтитры – замечательная вещь, которую мы использовали в наших классах, у меня есть ученик с нарушением слуха, и мы используем это на всех наших встречах. . Таким образом, это открыло огромное количество дверей для всех видов инвалидности в отношении когнитивного, нейрокогнитивного разнообразия или нейроразнообразия. И у людей есть проблемы с обучением, сегодня мы узнаем с COVID-19, что такого рода нарушения обучения намного больше, чем мы думали раньше, у студентов есть все виды проблем.И это также важно признать, а также, как отметила Мишель, эти социально-экономические различия, верно, мы часто ориентируемся на именно таких людей, которые могут позволить себе такие роботы и инструменты и даже имеют дома Wi-Fi. Верно, но многие этого не делают. Итак, как мы об этом думаем? Кроме того, я также думаю, что в интеллектуальном плане мы также склонны нацеливаться, вы знаете, на инклюзивность, с точки зрения людей, которые развиваются, часто такие ботаники, как я, инженеры, верно? Мы все люди, которые хорошо себя чувствуют, занимаясь естествознанием или математикой, но многие этого не делают, у них просто нет этого, что им там некомфортно.И они, но они чувствуют себя исключенными. Итак, как нам взаимодействовать с людьми, которые являются художниками и гуманистами, а также писателями, журналистами, вы знаете, которые так вовлечены во все сферы деятельности. Итак, все эти вещи, а также рабочие часто страдают от роботов, которые мы разрабатываем, поэтому нам нужно взаимодействовать с рабочими и действительно тщательно обдумывать, как это повлияет на этих рабочих, особенно на минимальную заработную плату. , которые, как вы знаете, наиболее уязвимы для этих технологий. Так что, ммм, есть так много вещей, которые меня как бы интересуют.И я также должен сказать, что я Кенни, я не встречал вас раньше, но я очень рад продолжить с вами, потому что у нас есть общий опыт в Нигерии. Я здесь родился. И в 60-е, и мы хотели бы те программы, о которых вы упомянули, о которых я не осведомлен. Но это было захватывающе, потому что мы вместе с профессором из Ганы начали так называемую африканскую сеть робототехники. И это, это, это, это было немного в соответствии с первой целью. Это было в 2012 году, нужно было построить сверхдоступного робота для образования, чтобы спроектировать сверхдоступного.И задача заключалась в том, чтобы создать что-то менее 10 долларов. Поэтому мы думали, что никто никогда не сможет сделать этого программируемого робота менее чем за 10 долларов. Во всяком случае, оказалось, что кто-то это сделал. И это было то, что это был любитель, живущий в Таиланде, по сути, придумал то, что он называет ботинком на палочке. И если вы посмотрите это в Интернете, это будет l o, l, l, y BOT, бот-леденец, и он стоит 8,64 доллара. Так что вы можете собрать его из старого игрового контроллера Sony. В любом случае, я хочу сказать, что мне нравится то, что вы говорите, потому что я полностью согласен с этим, есть большие возможности, я очень воодушевлен Африкой и ее потенциалом, я думаю, что это большой континент, и что мы то, что в будущем будет ускоряться.И одна из вещей, которые африканские студенты, я обнаружил, действительно невероятная способность, – это знать, как мыслить нестандартно, так, чтобы они думали иначе, исходя из своего опыта. Таким образом, они очень, очень хорошо знают, как сделать что-то доступным и экологически безопасным, как сделать что-то, что работало бы даже при отключении электричества, о чем на Западе обычно не думают. Но такие вещи действительно важны. Так вот и роботами там занимается и интересуется как любой пацан где угодно.Вот почему я хочу иметь возможность привнести их в роботов и программы, о которых вы говорите, например, панафриканские соревнования по робототехнике, мне это очень нравится. Поэтому я хочу связаться с вами, потому что я действительно хотел бы продолжить. Но я думаю, что это одна из вещей, которые мы можем сделать. Как группа из нас сегодня вечером, которая должна сломать это, мы формируем сообщество, я имею в виду, что я чувствую, что есть реальное ощущение того, что здесь происходит что-то на земле. И я так взволнован, я хочу поблагодарить тебя, Андра, за то, что собрал эту группу.Потому что здесь есть искра, которую я хочу поддержать. И я имею в виду, что я действительно хочу, чтобы в ближайшие несколько лет этот рост увеличился. И я думаю, что мы находимся в историческом моменте времени, когда это возможность для нас сделать шаг вперед и действительно воспользоваться этой возможностью и сделать что-то с ней, продвигаясь вперед действительно значимым и устойчивым образом. Спасибо.
Andra Keay 1:02:03
Большое спасибо, Кен, это была замечательная записка для завершения. И, к сожалению, на сегодняшний вечер у нас нет времени.Но проблемное пространство огромно. Но уместно понимать, что пространство возможностей еще больше. И я лично много думал. Как бы выглядел робот, если бы он был разработан женщинами для женщин, и я могу представить, что все будет по-другому. Но представьте теперь, как бы это выглядело, если бы ваши языковые модели были предназначены для других языков, кроме английского. Или если вам пришлось столкнуться с проблемой разработки языковых моделей для нескольких языков, как в случае с Африкой. И мне нравятся примеры нестандартного мышления, которые мы можем там дать.Если научно доказано, что разнообразие способствует инновациям. И это может быть не так удобно. Но это, безусловно, намного продуктивнее. Если вы хотите внести изменения, а также создать что-то инклюзивное. Поэтому нам придется продолжить это обсуждение и распространить его на наши рабочие места и на остальных людей вокруг нас, потому что мы, да, нам нужно собрать всех в комнату. И я с нетерпением жду этого путешествия со всеми вами, и большое вам спасибо сегодня вечером.Замечательная речь. Хорошо, я остановлю запись и пожелаю всем спокойной ночи.
Доктор Мишель Джонсон 1:03:48
Спасибо
Расшифровано https://otter.ai
]]>Углеводородных Систем СКБ Гулиев Мамедов Фейзуллаев | Плита Тектоника
Вы читаете бесплатный превью
Страницы с 8 по 10 не показаны при предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 14 по 23 не показаны при предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 34 по 41 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 45 по 52 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 56 по 65 не показаны при предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 79 по 91 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 99 по 105 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы 113–115 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 126 по 169 не показаны в этом предварительном просмотре.
Вы читаете бесплатный превью
Страницы с 177 по 195 не показаны при предварительном просмотре.