
Изучение механического резонанса — Механика — Высшая школа — Продукция — nau-ra.ru
Изучение механического резонанса — Механика — Высшая школа — Продукция — nau-ra.ruИзучение механического резонанса
- Продукция
- Высшая школа
- Механика
- Изучение механического резонанса
Назначение
- Изучение вынужденных механических колебаний;
- Изучение свободных колебаний при движении тела под действием силы упругости;
- Измерение частоты внешнего воздействия на систему;
- Непрерывное измерение координаты тела, совершающего колебания;
- Построение резонансной кривой;
- Определение резонансной частоты системы;
- Исследование зависимости характеристик колебательной системы от ее параметров (массы тела, жесткости пружин, сопротивления движению).


Устройство
Тележка, которая может двигаться вдоль направляющей с малым трением (на магнитной подвеске), находится между двумя пружинами, одна из которых закреплена на направляющей, а вторая растягивается нитью, закрепленной на вращаемом двигателем диске на некотором расстоянии от его центра. В комплект входит 2 тележки, сильно отличающиеся по сопротивлению движению. Изменение частоты вынуждающей силы происходит при уменьшении или увеличении частоты вращения двигателя, которая контролируется с помощью оптоэлектрического датчика.
Описание
Измерение координаты тележки проводится с помощью датчика расстояния, что позволяет вывести на экран график зависимости координаты от времени и определить по нему амплитуду и частоту свободных колебаний (1-й этап работы).
На 2-ом этапе (получение резонансных кривых) амплитуда колебаний измеряется по показаниям датчика расстояния, а частота вынуждающей силы — на основе данных, приходящих от оптоэлектрического датчика. Полученные данные собираются в таблице и выводятся на экран в виде графика зависимости амплитуды колебаний от частоты (резонансная кривая). Это позволяет определить резонансную частоту и оценить добротность колебательной системы.
Построение резонансной кривой.
Цена — по запросу.
Наш телефон: +7 (495) 642-00-62; +7 (985) 291-77-50
Общие вопросы: [email protected]
Подпишитесь на нашу рассылку!
Узнайте о наших новостях, проектах, новинках первыми
 3s” data-wow-duration=”500ms”>Мы открыты для общения
3s” data-wow-duration=”500ms”>Мы открыты для общения
Гарантируем быструю реакцию
на обращения через форму обратной связи
Служба технической поддержки
Задать вопрос по работе с программой или оборудованием:
[email protected]Получить помощь по цифровой лаборатории «
Наураша в стране Наурандии»: +7 (495) 766-24-23, 8 (800) 505-23-48 [email protected]
9s”>Вопросы по продукции
 9s”>Вопросы по продукции
9s”>Вопросы по продукцииОформить заказ или предложить сотрудничество:
+7 (985) 291-77-50, +7 (495) 642-00-62 [email protected]Мы заботимся о качестве нашей продукции!
{literal}{/literal}Резонанс — механический, электрический и звуковой: сообщение
Резонанс является одним из интереснейших физических явлений. И чем глубже становятся наши познания об окружающем нас мире, тем явственнее прослеживается роль этого явления, в различных сферах нашей жизни — в музыке, медицине, радиотехнике и даже на детской площадке.
Каков же смысл этого понятия, условия его возникновения и проявление?
Собственные и вынужденные колебания.
 Резонанс
РезонансПрикладывая в нужный момент совсем незначительное усилие, ребёнок может раскачивать взрослого. Но для этого частота воздействия внешней силы должна совпасть с собственной частотой раскачивания качелей. Только в этом случае амплитуда их колебаний заметно вырастет.
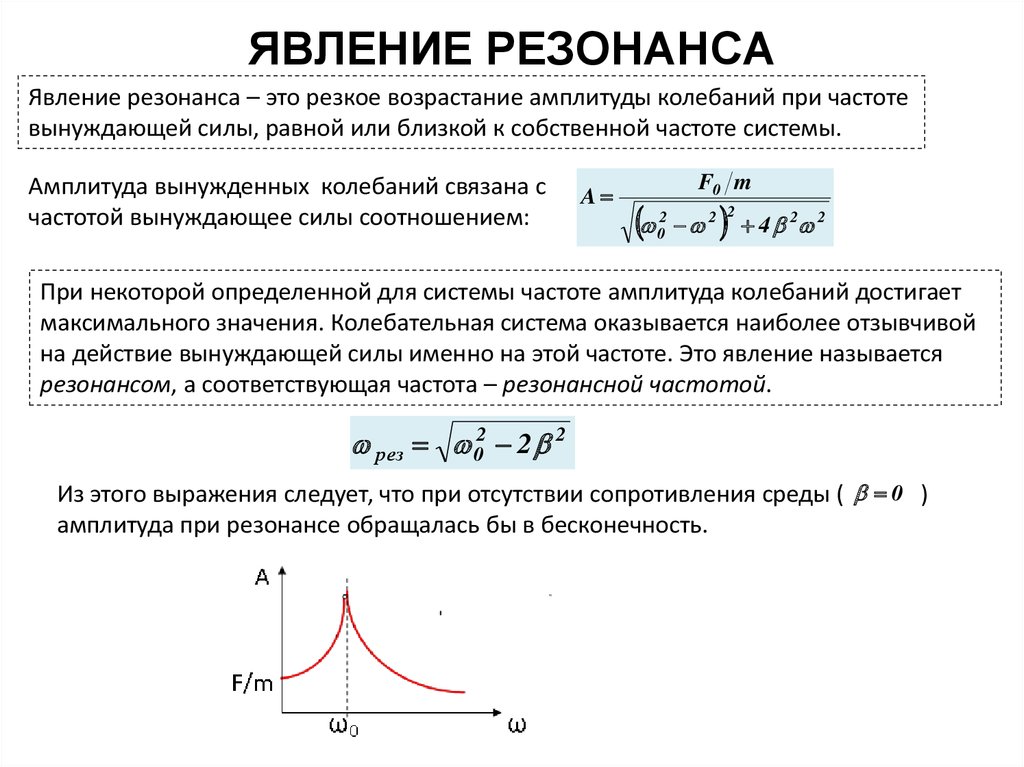
Итак, резонанс это явление резкого возрастания амплитуды колебаний тела, когда частота его собственных колебаний совпадет с частотой действия внешней силы.
Прежде всего, разберемся в понятиях — собственные и вынужденные колебания.
 Возникшие при этом собственные колебания будут затухающими, поскольку энергия колебаний затрачивается на преодоление сопротивления самой колебательной системы и окружающей среды.
Возникшие при этом собственные колебания будут затухающими, поскольку энергия колебаний затрачивается на преодоление сопротивления самой колебательной системы и окружающей среды.Вынужденные колебания возникают при воздействии на тело сторонней (внешней) силы с определенной частотой. Эту стороннюю силу ещё называют вынуждающей силой. Очень важно, чтобы эта внешняя сила действовала на тело в нужный момент и в нужном месте. Именно она восполняет потери энергии и увеличивает её при собственных колебаниях тела.
Механический резонанс
Очень ярким примером проявления резонанса является несколько случаев обрушения мостов, когда по ним строевым шагом проходила рота солдат.
Чеканный шаг солдатских сапог совпал с собственной частотой колебаний моста. Он стал колебаться с такой амплитудой, на которую его прочность не была рассчитана и… развалился. Тогда и родилась новая воинская команда «…не в ногу». Она звучит, когда пешая или конная рота солдат проходит по мосту.
Если вам случалось путешествовать на поезде, то самые внимательные из вас обратили внимание на заметные покачивания вагонов, когда его колеса попадают на стыки рельс. Это так вагон откликается, т. е. резонирует с колебаниями, возникающими при преодолении этих зазоров.
Корабельные приборы снабжают массивными подставками или подвешивают на мягких пружинах, чтобы избежать резонанса этих корабельных деталей с колебаниями корабельного корпуса. При запуске корабельных двигателей судно так может войти в резонанс с их работой, что это грозит его прочности.
Приведенных примеров достаточно, чтобы убедиться в необходимости учитывать резонанс. Но мы иногда и используем механический резонанс, не замечая этого. Выталкивая машину, застрявшую в дорожной грязи, водитель и его добровольные помощники вначале раскачивают её, а затем дружно толкают вперёд по направлению движения.
Раскачивая тяжелый колокол, звонари тоже неосознанно используют это явление.
Они ритмично в такт с собственными колебаниями языка колокола, дергают за прикрепленный к нему шнур, всё увеличивая амплитуду колебаний.
Существуют приборы, измеряющие частоту электрического тока. Их действие основано на использовании резонанса.
Акустический резонанс
На страницах нашего сайта мы познакомили вас с важнейшими сведениями о звуке. Продолжим наш разговор, дополнив его примерами проявления акустического или звукового резонанса.
Для чего у музыкальных инструментов, особенно у гитары и скрипки такой красивый корпус? Неужели лишь для того, чтобы красиво выглядеть? Оказывается, нет. Он нужен для правильного звучания, всей издаваемой инструментом звуковой палитры. Звук, издаваемый самой гитарной струной достаточно тихий. Чтобы его усилить струны, располагают поверх корпуса, имеющего определенную форму и размеры. Звук, попадая внутрь гитары, резонирует с различными частями корпуса и усиливается.
Сила и чистота звука зависит от качества дерева, и даже от лака, которым покрыт инструмент.
Имеются резонаторы и в нашем голосовом аппарате. Их роль выполняют самые различные воздушные полости, окружающие голосовые связки. Они-то усиливают звук, формируют его тембр, усиливая именно те колебания, частота которых близка к их собственной. Умение использовать резонаторы своего голосового аппарата — это одна из сторон таланта певца. Им в совершенстве владел Ф.И. Шаляпин.
Они-то усиливают звук, формируют его тембр, усиливая именно те колебания, частота которых близка к их собственной. Умение использовать резонаторы своего голосового аппарата — это одна из сторон таланта певца. Им в совершенстве владел Ф.И. Шаляпин.
Рассказывают, что когда этот великий артист пел во всю мощь, гасли свечи, тряслись люстры и трескались гранёные стаканы.
Т.е. явление звукового резонанса играет громадную роль в восхитительном мире звуков.
Электрический резонанс
Не миновало это явление и электрические цепи. Если частота изменения внешнего напряжения совпадет с частой собственных колебаний цепи, то может возникнуть электрический резонанс. Как всегда он проявляется в резком возрастании и силы тока и напряжения в цепи. Это чревато коротким замыкание и выходом из строя приборов, включённых в цепь.
Однако именно резонанс позволяет нам настроиться на частоту определенной радиостанции. Обычно на антенну поступает множество частот от различных радиостанций. Вращая ручку настройки, мы меняем частоту приёмного контура радиоприёмника.
Вращая ручку настройки, мы меняем частоту приёмного контура радиоприёмника.
Когда одна из пришедших на антенну частот совпадет с этой частотой, тогда мы и услышим эту радиостанцию.
Волны Шумана
Между поверхностью Земли и ее ионосферой существует слой, в котором очень хорошо распространяются электромагнитные волны. Этот небесный коридор называют волноводом. Рождающиеся здесь волны могут несколько раз огибать Землю. Но откуда они берутся? Оказалось, что они возникают при разрядах молний.
Профессор Мюнхенского технического университета Шуман рассчитал их частоту. Выяснилось, что она равна 10 Гц. Но именно с таким ритмом происходят колебания человеческого мозга! Этот удивительный факт не мог быть простым совпадением. 
Т.е. для нормального самочувствия человека ритм важнейших колебаний человеческого организма должен резонировать с частотой волн Шумана.
Электромагнитный смог от работы бытовых и промышленных электроприборов искажают природные волны Земли, и разрушает наши тонкие взаимосвязи со своей планетой.
Законам резонанса подчинены все объекты Вселенной. Этим законам подчиняются даже взаимоотношения людей. Так, выбирая себе друзей, мы ищем себе подобных, с которыми нам интересно, с которыми находимся «на одной волне».
Автор: Драчёва Светлана Семёновна
Если это сообщение тебе пригодилось, буда рада видеть тебя в группе ВКонтакте. А ещё — спасибо, если ты нажмёшь на одну из кнопочек «лайков»:
Механическая резонансная частота и способы ее анализа
В какой-то момент своей карьеры системные инженеры, вероятно, столкнутся со случаем, когда резонансная реакция системы вызывает проблемы с движением и/или слышимое раздражение. Этот резонанс или вибрация нежелательны и могут привести к значительному снижению производительности. Например, фрезерный станок с ЧПУ (который обычно имеет высокую резонансную частоту из-за высокой жесткости) [1] будет колебаться вокруг желаемого пути фрезерования, если возбуждена резонансная частота. Другим примером является инструмент для обработки фармацевтических жидкостей с неожиданными вибрациями, которые взбалтывают транспортируемый жидкий раствор. В этой статье мы рассмотрим, почему существуют резонансы и какие инструменты можно использовать для их анализа.
Этот резонанс или вибрация нежелательны и могут привести к значительному снижению производительности. Например, фрезерный станок с ЧПУ (который обычно имеет высокую резонансную частоту из-за высокой жесткости) [1] будет колебаться вокруг желаемого пути фрезерования, если возбуждена резонансная частота. Другим примером является инструмент для обработки фармацевтических жидкостей с неожиданными вибрациями, которые взбалтывают транспортируемый жидкий раствор. В этой статье мы рассмотрим, почему существуют резонансы и какие инструменты можно использовать для их анализа.
Почему механические системы имеют резонансную частоту?
Первым шагом к ответу на этот вопрос является создание модели механической системы. Для определения положения массы с учетом условий трения и податливости необходимо, чтобы модель представляла собой систему одного или нескольких дифференциальных уравнений 2-го порядка (или выше). Чтобы найти решение, а также упростить анализ поведения, нерешенные уравнения во временной области преобразуются в s-область с помощью преобразования Лапласа 9. 0008 . Это облегчает создание передаточной функции на уровне системы, которую также называют «характеристическим уравнением».
0008 . Это облегчает создание передаточной функции на уровне системы, которую также называют «характеристическим уравнением».
Знаменатель передаточной функции содержит переменные состояния порядка n. Значения s (действительные и/или мнимые), где знаменатель равен нулю, называются корнями знаменателя, которые называются «полюсами». Числитель может быть константой или содержать переменную (переменные) состояния порядка n, аналогичную знаменателю. Значения s (действительные и/или мнимые), в которых числитель равен нулю, называются корнями числителя, которые называются «нули». Если числитель постоянный, то нулей нет. Эта информация может быть использована для формулирования решения во временной области для модели. Однако используемый здесь частотный анализ будет ограничен s-областью для простоты вычислений.
Полюса и нули очень полезны для определения поведения и стабильности. Например, критерии стабильности требуют, чтобы порядок знаменателя (количество полюсов) не был меньше порядка числителя (количества нулей). Кроме того, действительная часть доминирующих полюсов должна быть отрицательной (левая часть плоскости s), чтобы система считалась устойчивой. Полюса будут использоваться здесь для объяснения существования резонансной частоты.
Кроме того, действительная часть доминирующих полюсов должна быть отрицательной (левая часть плоскости s), чтобы система считалась устойчивой. Полюса будут использоваться здесь для объяснения существования резонансной частоты.
Инерциальные системы имеют резонансную частоту, которая существует из-за врожденных свойств. Однако система должна быть более сложной, чем инерция чисто твердого тела, иначе ее характеристическое уравнение будет иметь только полюса в нуле. Другие члены в характеристическом уравнении, которые могут быть такими простыми, как член податливости (пружина), будут вводить ненулевые частотные компоненты (корни с мнимыми частями) в характеристическое уравнение. Чисто инерциальные системы будут иметь полюса на нуле и, следовательно, не будут иметь резонансной частоты.
«Твердое тело» на самом деле является академической конструкцией, которой не существует в реальном мире, поэтому даже простые инерционные системы могут иметь механическую резонансную частоту при добавлении пружинных элементов (податливость) и/или демпфирующих компонентов (вязкое трение). к модели. Некоторые системы достаточно демпфированы, чтобы подавить резонансную частоту. В этом случае резонансная частота все еще существует (мнимая часть корней), но едва заметна, поскольку в отклике доминируют действительные части корней.
к модели. Некоторые системы достаточно демпфированы, чтобы подавить резонансную частоту. В этом случае резонансная частота все еще существует (мнимая часть корней), но едва заметна, поскольку в отклике доминируют действительные части корней.
Демонстрационная установка
Система, используемая в этой демонстрации (рис. 1), представляет собой массу наверху металлической линейки, которая будет действовать как пружина. Нижняя часть пружины прикреплена к ступени линейного двигателя. Для простоты будет анализироваться только движение в направлении линейного двигателя. Движение м 2 будет рассматриваться как линейное, что является правильным приближением для малых углов. Это упрощение остается в силе в контексте описания источника резонансной частоты. Также только положение мотора, м 1 , измеряется.
Модель содержит коэффициент демпфирования системы, b s , который придает силу, пропорциональную скорости и противоположную направлению движения. Это свойство обычно называют «вязким трением» и представляет собой любые подобные трению свойства, которые пропорциональны скорости. Сила, приложенная к системе магнитным полем двигателя, управляется изменением тока в обмотках двигателя. 9Рис. 1. Демонстрационная система 1
Это свойство обычно называют «вязким трением» и представляет собой любые подобные трению свойства, которые пропорциональны скорости. Сила, приложенная к системе магнитным полем двигателя, управляется изменением тока в обмотках двигателя. 9Рис. 1. Демонстрационная система 1
Обратите внимание, что член слева от правой части уравнения представляет собой «несвязанный» отклик. Если пружина имеет бесконечную жесткость, крайний правый член равен единице, а две массы жестко связаны и действуют как одна масса. В этом случае есть только полюса на нуле и, следовательно, нет резонансной частоты.
Термин справа вводит корни с мнимыми компонентами, таким образом, создавая потенциал для частотной характеристики. Для случая, когда b s равно нулю, корни этого слагаемого принимают вид: < 0,6K s /w n ) [2], введет действительную составляющую в корни и сдвинет их так, чтобы резонансная частота была немного меньше незатухающей собственной частоты. Более сильный демпфирующий член ( b s < 0,6K s /w n ) [2] снизит резонансную частоту еще больше, но отклик на частоте будет ослаблен и малоэффективен. В этом случае действительные части корней являются доминирующими.
Более сильный демпфирующий член ( b s < 0,6K s /w n ) [2] снизит резонансную частоту еще больше, но отклик на частоте будет ослаблен и малоэффективен. В этом случае действительные части корней являются доминирующими.
Из-за нуля в числителе эта модель также будет иметь «антирезонансную» частоту. Это можно наблюдать как уменьшение отклика при заданном антирезонансе. Системы со связанными массами, подобные анализируемой здесь, будут содержать антирезонансную частоту чуть ниже резонансной частоты.
За пределами резонансной частоты отклик больше, чем у системы с жестко связанными массами. В последнем случае вибрация создает больше всего проблем [1].
Экспериментальное определение резонансной частоты
Использование в качестве определения резонансной частоты «частоты, при которой система будет демонстрировать локализованный максимальный отклик» означает, что эксперимент может быть проведен на системе, где отклик как функция частоты измерено.
Один инструмент, называемый разверткой по частоте, подает в систему сигнал переменной частоты. Ввод частоты начинается с предварительно определенного значения и непрерывно изменяется до тех пор, пока не будет достигнуто определенное максимальное значение. Большинство механических систем имеют резонансные частоты в сотни герц или ниже. Если резонансная частота значительна, обычно создается слышимый звук, который может быть воспринят слушателем.
Похожий, но более точный инструмент, график Боде, анализирует усиление и фазу отклика и создает график в частотной области. Для упрощения вычислений на цифровом процессоре производится выборка набора дискретных частот, а результаты обрабатываются с помощью БПФ (быстрого преобразования Фурье).
В этом видео на YouTube демонстрируется использование различных инструментов в Pro-Motion® для определения резонансной частоты системы на рисунке 1:
Метод № 1: расчет на основе трассировки фактического положения отклика на возмущение .
В систему введено возмущение. Функция Pro-Motion SCOPE используется для отслеживания отклика позиции м 1 . Резонансная частота обратно пропорциональна периоду времени между одним пиком и другим. Из видео видно, что период довольно близок к 100 мс. Это соответствует резонансной частоте 10 Гц.
Способ № 2. Развертка по частоте используется для развертки от низкой к высокой частоте.
На систему действует синусоидальная сила (через магнитное поле двигателя). Колебания системы наблюдают визуально (или на слух). Отмечают частоту локального максимума ответа. Из Метода №1 уже известна приблизительная резонансная частота. Однако, если система быстро приходит в норму в ответ на введенный «импульс» Метода № 1, то может быть недостаточно данных для определения резонансной частоты. Непрерывное возмущение, введенное методом № 2, даст больше данных в этом отношении, поскольку система никогда не стабилизируется.
Как видно на видео, амплитуда колебаний фактического положения начинает увеличиваться примерно на отметке 5,2 секунды (11 Гц). Частота продолжает увеличиваться до 14 Гц, и отклик затухает после прохождения резонансной частоты. Затем развертка меняет направление и перемещается от 14 Гц до 10,5 Гц и остается там. Как и ожидалось, амплитуда отклика увеличивается по мере приближения к резонансной частоте.
Метод № 3: построен график Боде системы, охватывающий тот же диапазон частот.
На систему снова действует синусоидальная сила. На этот раз реакция положения по отношению к приложенной силе используется для расчета усиления и фазы реакции. В этом случае пользователю не нужно полагаться на визуальные или звуковые подсказки. Пользователь может проанализировать данные об усилении, чтобы найти локальный максимум и частоту, связанную с этим максимумом. Для более детального анализа числовые данные можно перенести в электронную таблицу и проанализировать.
Для более детального анализа числовые данные можно перенести в электронную таблицу и проанализировать.
Рис. 2. Данные усиления Боде в электронной таблице.
На рис. 2 показано более точное определение резонансной частоты (10,6 Гц). На рисунке 2 также можно наблюдать антирезонансную частоту около 10,1 Гц.
В конце концов…
Поскольку ни одна инерциальная система не содержит истинных масс «твердого тела», все механические системы имеют ненулевую резонансную частоту. Возбуждение резонансной частоты приведет к ухудшению характеристик системы как с точки зрения краткосрочной точности, так и с точки зрения долгосрочного обслуживания.
Продемонстрированы три метода экспериментального определения резонансной частоты. Метод № 1 дал результат в пределах 10%, но этот метод был ограничен системами, которые имеют недостаточно затухающую реакцию на импульс. Метод № 2, который опирается на визуальные и звуковые подсказки, дал эквивалентную точность и работает как в системах с избыточным, так и с недостаточным демпфированием. Метод №3 предоставил наиболее подробную информацию о частотной характеристике системы. Точность оценки резонансной частоты была значительно улучшена. Кроме того, этот метод также позволил определить антирезонансную частоту.
Метод №3 предоставил наиболее подробную информацию о частотной характеристике системы. Точность оценки резонансной частоты была значительно улучшена. Кроме того, этот метод также позволил определить антирезонансную частоту.
Ссылки:
1 Г. Эллис, Лечение механического резонанса в промышленных сервосистемах
2 Дж. Д’Аццо и К. Хупи, Анализ и проектирование систем линейного управления: обычные и современные, McGraw-Hill, Inc., 1995, стр. 292-293.
Продукты PMD, поддерживающие серводвигатели
Компания PMD уже более двадцати пяти лет производит интегральные схемы, обеспечивающие расширенное управление движением щеточных и бесщеточных двигателей постоянного тока. С тех пор мы также встроили эти микросхемы в модули plug and play и платы управления движением. Несмотря на различия в упаковке, все эти продукты управляются C-Motion, простым в использовании языком управления движением PMD, и идеально подходят для использования в медицинских, лабораторных, полупроводниковых, роботизированных и промышленных приложениях управления движением.
Программное обеспечение для анализа движения Pro-Motion
Pro-Motion — это простая в использовании программа PMD для тренажера и анализа движения на базе Windows. Он предлагает готовые возможности, которыми сможет поделиться вся ваша команда разработчиков. Пошаговый мастер управления осями позволяет разработчикам быстро и легко настраивать контур положения, контур тока и параметры мотора управления, ориентированного на поле. Опытные пользователи могут получить доступ к полному пакету анализа движения с построением диаграммы Боде и автоматической настройкой.
Узнать больше >>
ИС серии MC58113
ИС серии MC58113 являются частью популярного семейства Magellan Motion Control IC и обеспечивают расширенное управление положением шагового двигателя постоянного тока, двигателя постоянного тока BL, шагового двигателя постоянного тока и шагового двигателя постоянного тока. . Стандартные функции включают автонастройку, профилирование s-образной кривой, FOC (Field Oriented Control), управление высоким/низким переключаемым сигналом, прямой энкодер, ввод импульсов и направления и многое другое. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
. Стандартные функции включают автонастройку, профилирование s-образной кривой, FOC (Field Oriented Control), управление высоким/низким переключаемым сигналом, прямой энкодер, ввод импульсов и направления и многое другое. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
Цифровые приводы ION
Цифровые приводы ION сочетают в себе одноосную интегральную схему Magellan IC и сверхэффективный цифровой усилитель в компактном прочном корпусе. В дополнение к расширенному управлению серводвигателем, ION обеспечивают S-образное перемещение от точки к точке, управление питанием i2T, загружаемый код пользователя и ряд функций безопасности, включая обнаружение перегрузки по току, перенапряжению и перегреву. ION — это простые в использовании устройства plug and play, которые мгновенно запустят ваше приложение.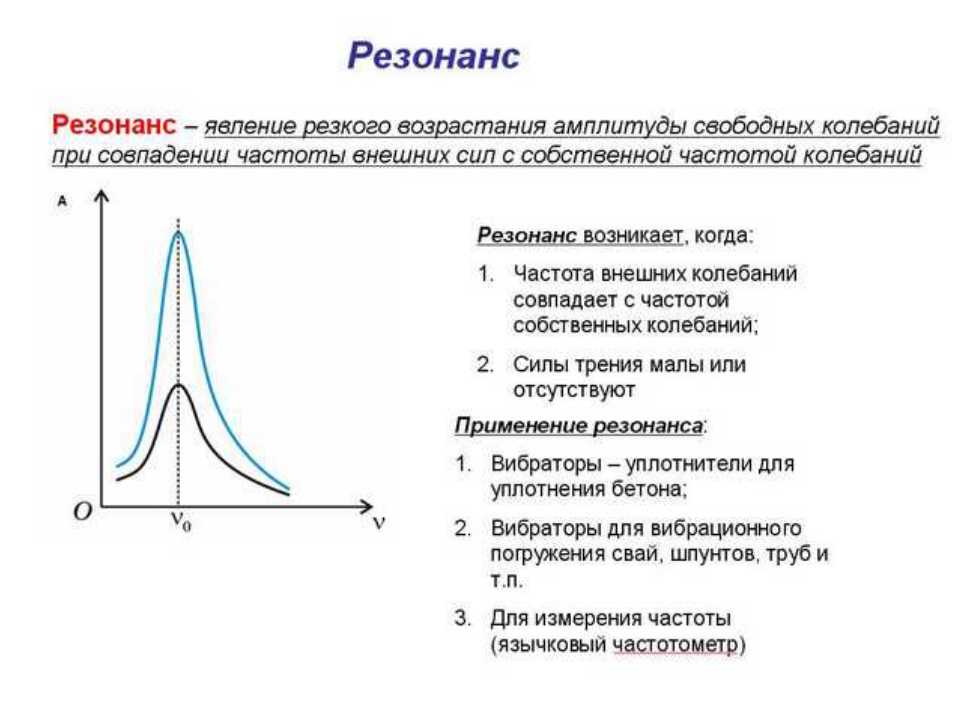
Платы управления движением Prodigy
Платы Prodigy®/CME Machine-Controller обеспечивают высокоэффективное управление движением для медицинских, научных, автоматизированных, промышленных и роботизированных приложений. Доступные в конфигурациях с 1, 2, 3 и 4 осями, эти платы поддерживают щеточные двигатели постоянного тока, бесщеточные двигатели постоянного тока и шаговые двигатели, а также позволяют загружать написанный пользователем код на языке C и запускать его непосредственно на плате. Машинный контроллер Prodigy/CME имеет на борту Усилители Atlas , устраняющие необходимость во внешних усилителях. Для создания полностью функционирующей системы необходимы только один высоковольтный источник питания, двигатели и кабели. Варианты интерфейса хоста включают Ethernet UDP и TCP, CANbus, RS-232 и RS-485.
Узнать больше >>
Вас также может заинтересовать:
- Мобильная и портативная автоматизация требует легкой, эффективной и прохладной работы
- Field Oriented Control (FOC) — подробное описание
- Настройка серводвигателя – ракетостроение или прогулка по парку
- Precision Fluid Handling: оптимизация механики лабораторной автоматизации
- Новый метод управления сочетает в себе производительность сервопривода и стоимость шагового двигателя
Механический резонанс | СТРОЙКА
Поиск
Механический резонанс можно свести к минимуму с помощью специальных амортизирующих креплений, отделяющих поверхности стен от стенных стоек.
Что такое механическая передача звука?
Механическая передача звука — это то, что происходит, когда звук проходит непосредственно от одного элемента здания к другому. Отличным примером является звук шагов на верхнем этаже, перемещающихся на нижние этажи. Когда нога ударяется о поверхность пола, она посылает вибрацию, которая проходит через пол, через раму и проходит через потолок в комнату внизу, даже не затрагивая воздух.
Что такое механический резонанс?
Механический резонанс возникает, когда частота звука совпадает с резонансной частотой материала, усиливая звуковую волну. Классический пример — оперная певица разбивает стакан своим голосом, когда попадает в нужную ноту. Сопоставляя ноту с резонансной частотой стакана и поддерживая ее, оперный певец может увеличить вибрацию стакана до такой степени, что он разобьется, не в силах больше справляться с движением между его частицами.
Многие материалы имеют более одной резонансной частоты, поэтому легче вибрируют, когда через них проходят определенные звуки. Если у вас есть большая стереосистема, вы могли заметить, что некоторые предметы дребезжат или вибрируют при воспроизведении определенных нот — это механический резонанс.
Если у вас есть большая стереосистема, вы могли заметить, что некоторые предметы дребезжат или вибрируют при воспроизведении определенных нот — это механический резонанс.
Как механический резонанс связан со зданиями и звукоизоляцией?
Механический резонанс может в буквальном смысле привести к тому, что здание рассыплется на части, если правильный звук будет слышен на достаточно большой громкости. Этот эффект неоднократно наблюдался во всех видах конструкций, от подвесных мостов до высотных многоквартирных домов. Однако обычно это не проблема, когда речь идет о домах, потому что масса дома обычно намного меньше, чем у большинства коммерческих объектов.
Механическая передача звука представляет собой проблему, особенно в многоэтажных домах, где звук может проникать через пол одного этажа в потолок нижнего этажа.
Для ограничения передачи механического звука необходимо установить акустические прокладки в раме и других ключевых местах конструкции, подобно тому, как предотвращается образование тепловых мостов.