
Краткое содержание школьного курса физики Механика Формулы кинематики Кинематика Механическое движение
Краткое содержание
школьного курса физики
Механика
Формулы кинематики:
Кинематика
Механическое движение
Механическим движением называется изменение положения тела (в пространстве) относительно других тел (с течением времени).
Относительность движения. Система отсчета
Чтобы описать механическое движение тела (точки), нужно знать его координаты в любой момент времени. Для определения координат следует выбрать тело отсчета и связать с ним систему координат. Часто телом отсчета служит Земля, с которой связывается прямоугольная декартова система координат. Для определения положения точки в любой момент времени необходимо также задать начало отсчета времени.
Система координат, тело отсчета,
с которым она связана, и прибор для
измерения времени образуют систему
отсчета, относительно которой
рассматривается движение тела.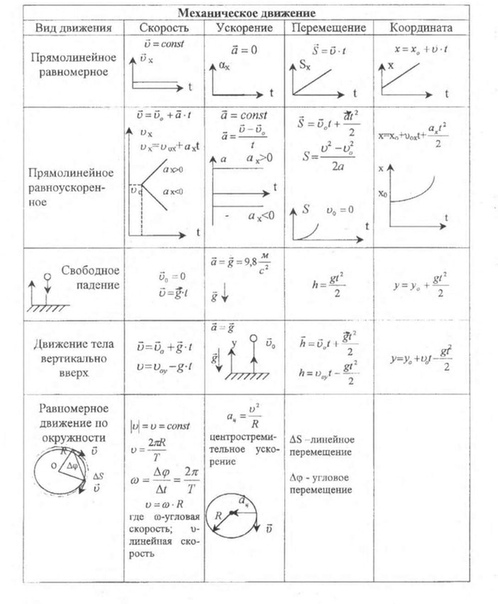
Материальная точка
Тело, размерами которого в данных условиях движения можно пренебречь, называют материальной точкой.
Тело можно рассматривать как материальную точку, если его размеры малы по сравнению с расстоянием, которое оно проходит, или по сравнению с расстояниями от него до других тел.
Траектория, путь, перемещение
Траекторией движения называется линия, вдоль которой движется тело. Длина траектории называется пройденным путем. Путь – скалярная физическая величина, может быть только положительным.
Перемещением называется вектор, соединяющий начальную и конечную точки траектории.
Движение тела, при котором все его точки в данный момент времени движутся одинаково, называется поступательным движением. Для описания поступательного движения тела достаточно выбрать одну точку и описать ее движение.
Движение, при котором траектории
всех точек тела являются окружностями
с центрами на одной прямой и все плоскости
окружностей перпендикулярны этой
прямой, называется вращательным
движением.
Метр и секунда
Чтобы определить координаты тела, необходимо уметь измерять расстояние на прямой между двумя точками. Любой процесс измерения физической величины заключается в сравнении измеряемой величины с единицей измерения этой величины.
Единицей измерения длины в Международной системе единиц (СИ) является метр. Метр равен примерно 1/40 000 000 части земного меридиана. По современному представлению метр – это расстояние, которое свет проходит в пустоте за 1/299 792 458 долю секунды.
Для измерения времени выбирается какой-нибудь периодически повторяющийся процесс. Единицей измерения времени в СИ принята секунда. Секунда равна 9 192 631 770 периодам излучения атома цезия при переходе между двумя уровнями сверхтонкой структуры основного состояния.
В СИ длина и время приняты за независимые от других величины. Подобные величины называются основными.
Мгновенная скорость
Для количественной характеристики
процесса движения тела вводится понятие
скорости движения.
Мгновенной скоростью поступательного движения тела в момент времени t называется отношение очень малого перемещения s к малому промежутку времени t, за который произошло это перемещение:
; .
Единицей скорости является 1 м/с. Метр в секунду равен скорости прямолинейно и равномерно движущейся точки, при которой точка за время 1 с перемещается на расстояние 1 м.
Ускорение
Ускорением называется векторная физическая величина, равная отношению очень малого изменения вектора скорости к малому промежутку времени, за которое произошло это изменение, т.е. это мера быстроты изменения скорости:
; .
Метр в секунду за секунду – это
такое ускорение, при котором скорость
тела, движущегося прямолинейно и
равноускоренно, за время 1 с изменяется
на 1 м/с.
Направление вектора ускорения совпадает с направлением вектора изменения скорости () при очень малых значениях промежутка времени, за который происходит изменение скорости.
Если тело движется по прямой и его скорость возрастает, то направление вектора ускорения совпадает с направлением вектора скорости; при убывании скорости – противоположно направлению вектора скорости.
При движении по криволинейной траектории направление вектора скорости изменяется в процессе движения, вектор ускорения при этом может оказаться направлен под любым углом к вектору скорости.
Равномерное, равноускоренное прямолинейное движение
Движение с постоянной скоростью называется равномерным прямолинейным движением. При равномерном прямолинейном движении тело движется по прямой и за любые равные промежутки времени проходит одинаковые пути.
Движение, при котором тело за
равные промежутки времени совершает
неодинаковые перемещения, называют неравномерным движением. При таком
движении скорость тела изменяется с
течением времени.
При таком
движении скорость тела изменяется с
течением времени.
Равнопеременным
Равноускоренным называется равнопеременное движение, при котором величина скорости возрастает. Равнозамедленным – равнопеременное движение, при котором величина скорости уменьшается.
Сложение скоростей
Рассмотрим перемещение тела в подвижной системе координат. Пусть – перемещение тела в подвижной системе координат, – перемещение подвижной системы координат относительно неподвижной, тогда – перемещение тела в неподвижной системе координат равно:
Если перемещения и совершаются одновременно, то:
.
Таким образом
.
Мы получили, что скорость тела
относительно неподвижной системы
отсчета равна сумме скорости тела в
подвижной системе отсчета и скорости
подвижной системы отсчета относительно
неподвижной.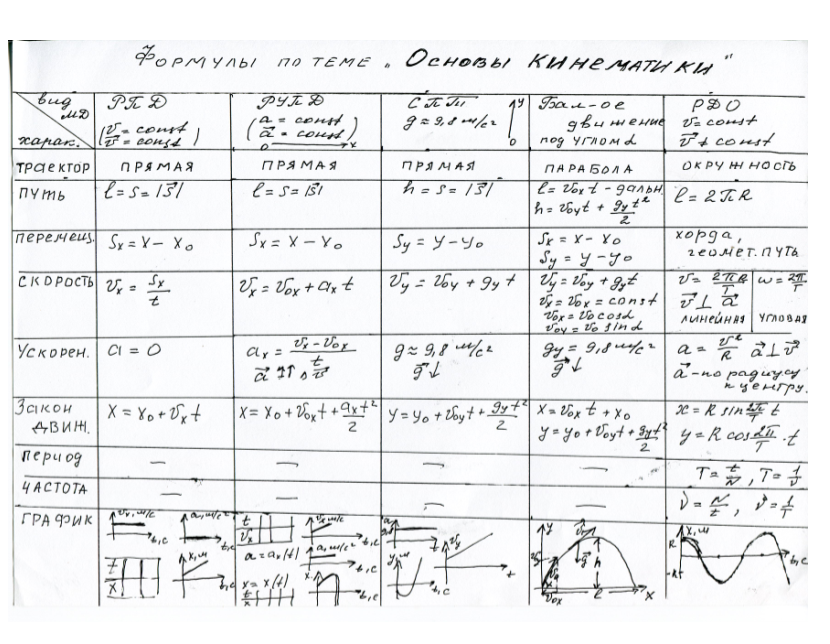 Это утверждение называется классическим законом сложения
скоростей.
Это утверждение называется классическим законом сложения
скоростей.
Графики зависимости кинематических величин от времени
в равномерном и равноускоренном движении
При равномерном движении:
График скорости – прямая y = b;
График ускорения – прямая y = 0;
График перемещения – прямая y = kx+b.
При равноускоренном движении:
График скорости – прямая y = kx+b;
График ускорения – прямая y = b;
График перемещения – парабола:
если a>0, ветви вверх;
чем больше ускорение, тем уже ветви;
вершина совпадает по времени с моментом, когда скорость тела равна нулю;
как правило, проходит через начало отсчета.
Свободное падение тел.
 Ускорение свободного падения
Ускорение свободного паденияСвободным падением называется такое движение тела, когда на него действует только сила тяжести.
При свободном падении ускорение тела направлено вертикально вниз и примерно равно 9,8 м/с2. Это ускорение называется ускорением свободного падения и одинаково для всех тел.
Равномерное движение по окружности
При равномерном движении по окружности значение скорости постоянно, а ее направление изменяется в процессе движения. Мгновенная скорость тела всегда направлена по касательной к траектории движения.
Т.к. направление скорости при равномерном движении по окружности постоянно изменяется, то это движение всегда равноускоренное.
Промежуток времени, за который тело совершает полный оборот при движении по окружности, называется периодом:
.
Т.к. длина окружности s равна 2R, период обращения при равномерном движении тела со скоростью v по окружности радиусом R равен:
.
Величина, обратная периоду обращения, называется частотой обращения и показывает, сколько оборотов по окружности совершает тело в единицу времени:
.
Угловой скоростью называется отношение угла, на который повернулось тело, к времени поворота:
.
Угловая скорость численно равна числу оборотов за 2 секунд.
Ускорение при равномерном движении тел по окружности (центростремительное ускорение)
При равномерном движении по окружности тело движется с центростремительным ускорением. Определим это ускорение.
Ускорение направлено туда же, куда и изменение скорости, следовательно, ускорение направлено к центру окружности. Важное допущение: угол настолько мал, что длина хорды AB совпадает с длиной дуги:
.
по двум пропорциональным сторонам
и углу между ними. Следовательно:
Следовательно:
– модуль центростремительного ускорения.
Основы динамики
Первый закон Ньютона. Инерциальные системы отсчета.
Принцип относительности Галилея
Любое тело остается неподвижным, пока на него не действуют другие тела. Тело, двигавшееся с некоторой скоростью, продолжает двигаться равномерно и прямолинейно до тех пор, пока не него не подействуют другие тела. К таким выводам о законах движения тел впервые пришел итальянский ученый Галилео Галилей.
Явление сохранения скорости движения тела при отсутствии внешних воздействий называется инерцией.
Всякий покой и движение тел
относительны. Одно и то же тело может
находиться в состоянии покоя в одной
системе отсчета и двигаться с ускорением
в другой. Но существуют такие системы
отсчета, относительно которых поступательно
движущиеся тела сохраняют свою скорость
постоянной, если на них не действуют
другие тела. Это утверждение называется
первым законом Ньютона (законом инерции).
Это утверждение называется
первым законом Ньютона (законом инерции).
Системы отсчета, относительно которых тело при отсутствии внешних воздействий движется прямолинейно и равномерно, называют инерциальными системами отсчета.
Инерциальных систем отсчета может быть сколь угодно много, т.е. любая система отсчета, которая движется равномерно и прямолинейно по отношению к инерциальной, также является инерциальной. Истинных (абсолютных) инерциальных систем отсчета нет.
Масса
Причиной изменения скорости движения тел всегда является его взаимодействие с другими телами.
При взаимодействии двух тел всегда изменяются скорости и первого, и второго тела, т.е. оба тела приобретают ускорения. Ускорения двух взаимодействующих тел могут быть различными, они зависят от инертности тел.
Инертность – способность
тела сохранять свое состояние движения
(покоя). Чем больше инертность тела, тем
меньшее ускорение оно приобретет при
взаимодействии с другими телами, и тем
будет ближе его движение к равномерному
прямолинейному движению по инерции.
Масса – физическая величина, характеризующая инертность тела. Чем большей массой обладает тело, тем меньшее ускорение оно получает при взаимодействии.
За единицу массы в СИ принят килограмм: [m]=1 кг.
Сила
В инерциальных системах отсчета любое изменение скорости тела происходит под действием других тел. Сила – это количественное выражение действия одного тела на другое.
Сила – векторная физическая величина, за ее направление принимают направление ускорения тела, которое вызывается этой силой. У силы всегда есть точка приложения.
В СИ за единицу силы принимаются сила, которая телу массой 1 кг сообщает ускорение 1 м/с2. Эта единица называется Ньютоном:
.
Второй закон Ньютона
Сила, действующая на тело, равна произведению массы тела на сообщаемое этой силой ускорение:
.
Таким образом, ускорение тела прямо пропорционально действующей на тело силе и обратно пропорционально его массе:
.
Сложение сил
При одновременном действии на одно тело нескольких сил тело движется с ускорением, являющимся векторной суммой ускорений, которые бы возникли под действием каждой силы в отдельности. Действующие на тело силы, приложенные к одной точке, складываются по правилу сложения векторов.
Векторная сумма всех сил, одновременно действующих на тело, называется равнодействующей силой.
Прямая, проходящая через вектор
силы, называется линией действия силы.
Если силы приложены к разным точкам
тела и действуют не параллельно друг
другу, то равнодействующая приложена
к точке пересечения линий действия сил.
Если силы действуют параллельно друг
другу, то точки приложения результирующей
силы нет, а линия ее действия определяется
формулой: (см. рисунок).
Момент силы. Условие равновесия рычага
Основным признаком взаимодействия тел в динамике является возникновение ускорений. Однако часто бывает нужно знать, при каких условиях тело, на которое действует несколько различных сил, находится в состоянии равновесия.
Существует два вида механического движения – поступательное движение и вращение.
Если траектории движения всех точек тела одинаковы, то движение поступательное. Если траектории всех точек тела – дуги концентрических окружностей (окружностей с одним центром – точкой вращения), то движение вращательное.
Равновесие невращающихся тел: невращающееся тело находится в равновесии, если геометрическая сумма сил, приложенных к телу, равна нулю.
Равновесие тела, имеющего неподвижную ось вращения
Если линия действия силы,
приложенной к телу, проходит через ось
вращения тела, то эта сила уравновешивается
силой упругости со стороны оси вращения.
Если линия действия силы не пересекает ось вращения, то эта сила не может быть уравновешена силой упругости со стороны оси вращения, и тело поворачивается вокруг оси.
Вращение тела вокруг оси под действием одной силы может быть остановлено действием второй силы. Опыт показывает, что если две силы по отдельности вызывают вращение тела в противоположных направлениях, то при их одновременном действии тело находится в равновесии, если выполняется условие:
,
где
d1 и d2 – кратчайшие расстояния от линий
действия сил F1 и
F2. Расстояние d
называется плечом силы, а произведение
модуля силы на плечо – моментом
силы:
.
Если моментам сил, вызывающим вращение тела вокруг оси по часовой стрелке, приписать положительный знак, а моментам сил, вызывающим вращение против часовой стрелки, – отрицательный знак, то условие равновесия тела, имеющего ось вращения, можно сформулировать в виде правила моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
.
За единицу вращающего момента в СИ принимается момент силы в 1 Н, линия действия которой находится на расстоянии 1 м от оси вращения. Эту единицу называют ньютон-метром.
Общее условие равновесия тела: тело находится в равновесии, если равны нулю геометрическая сумма всех приложенных к нему сил и алгебраическая сумма моментов этих сил относительно оси вращения.
При выполнении этого условия тело необязательно находится в покое. Оно может двигаться равномерно и прямолинейно или вращаться.
Виды равновесия
Равновесие называют устойчивым, если после небольших внешних воздействий тело возвращается в исходное состояние равновесия. Это происходит, если при небольшом смещении тела в любом направлении от первоначального положения равнодействующая сил, действующих на тело, становится отличной от нуля и направлена к положению равновесия.
Равновесие называется неустойчивым,
если при небольшом смещении тела из
положения равновесия равнодействующая
приложенных к нему сил отлична от нуля
и направлена от положения равновесия.
Равновесия называется безразличным, если при небольших смещениях тела из первоначального положения равнодействующая приложенных к телу сил остается равной нулю.
Центр тяжести
Центром тяжести называется точка, через которую проходит равнодействующая сил тяжести при любом расположении тела.
Третий закон Ньютона
Тела действуют друг на друга с силами, вдоль одной прямой, равными по модулю и противоположными по направлению. Эти силы имеют одинаковую физическую природу; они приложены к разным телам и поэтому друг друга не компенсируют.
Сила упругости. Закон Гука
Сила упругости возникает в результате деформации тела и направлена в сторону, противоположную деформации.
При малых по сравнению с размерами тел деформациях сила упругости прямо пропорциональна величине абсолютной деформации тела. В проекции на направление деформирования сила упругости равна
,
где
x – абсолютная деформация,
k – коэффициент жесткости.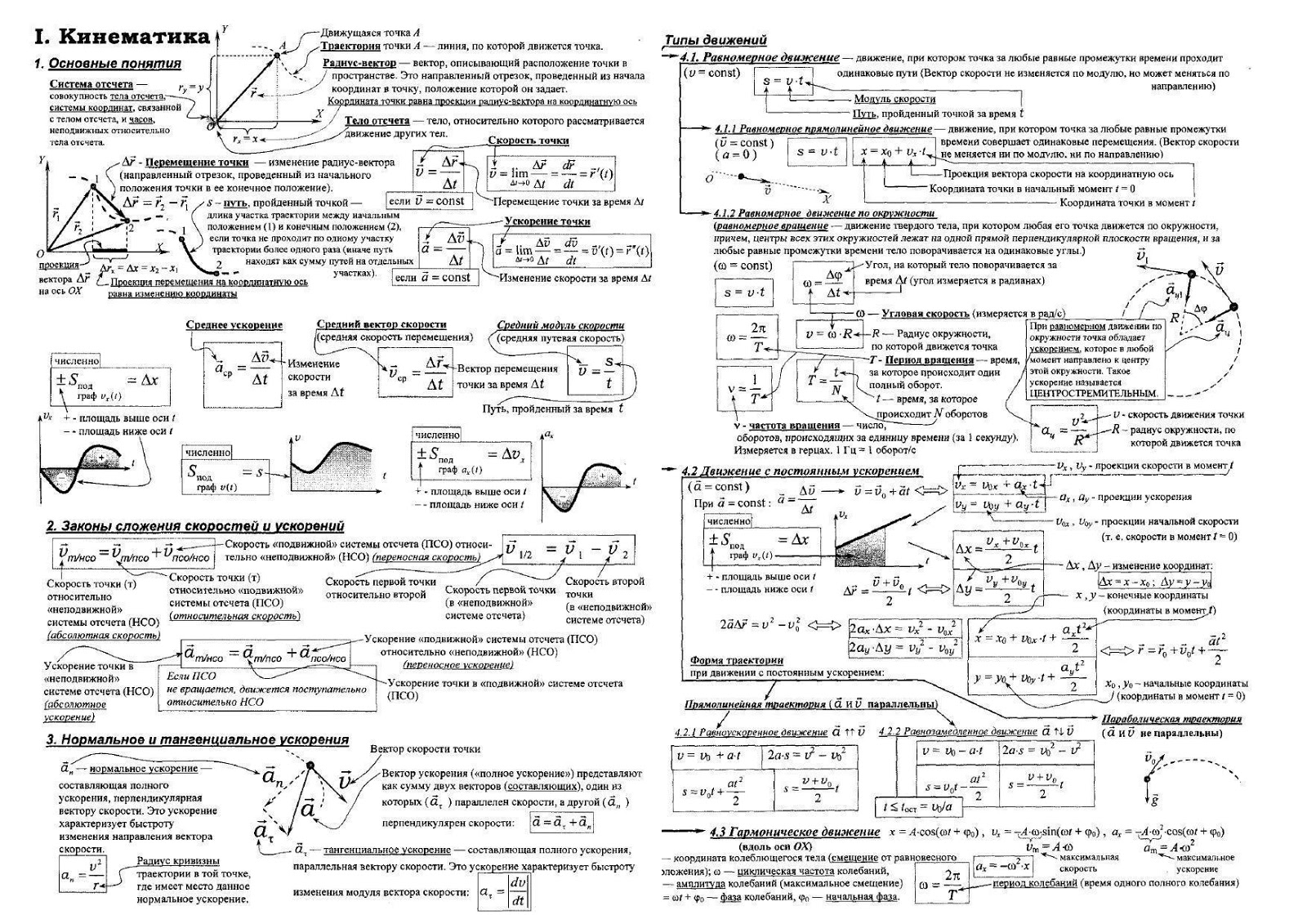
Этот закон был установлен экспериментально английским ученым Робертом Гуком и называется законом Гука:
Сила упругости, возникающая при деформации тела, пропорциональна удлинению тела и направлена в сторону, противоположную направлению перемещений частиц тела при деформации.
Коэффициент пропорциональности в законе Гука называется жесткостью тела. Он зависит от формы и размеров тела и от материала, из которого оно изготовлено (уменьшается с увеличением длины и с уменьшением площади поперечного сечения – см. Молекулярную Физику).
В Си жесткость выражается в ньютонах на метр: .
Упругая сила стремится восстановить форму тела, подвергнутого деформации, и приложена к телу, которое эту деформацию вызывает.
Природа силы упругости
электромагнитная, т.к. сила упругости
возникает в результате стремления
электромагнитных сил, действующих между
атомами вещества, вернуть атомы вещества
в исходное положение при изменении их
взаимного положения в результате
деформации.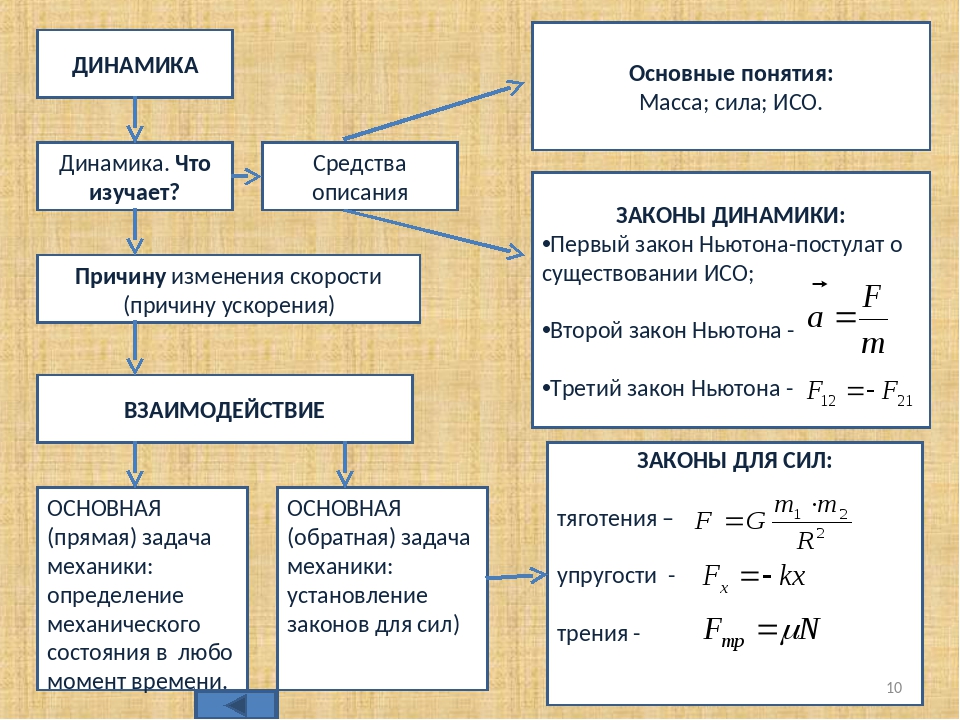
Упругая реакция опоры, нити, подвеса – пассивная сила, действующая всегда перпендикулярно поверхности опоры.
Сила трения. Коэффициент трения скольжения
Сила трения возникает при соприкосновении поверхностей двух тел и всегда препятствует их взаимному перемещению.
Сила, возникающая на границе соприкосновения тел при отсутствии относительного движения называется силой трения покоя. Сила трения покоя – упругая сила, она равна по модуля внешней силе, направленной по касательной к поверхности соприкосновения тел, и противоположна ей по направлению.
При движении одного тела по поверхности другого возникает сила трения скольжения.
Сила трения имеет электромагнитную природу, т.к. возникает благодаря существованию сил взаимодействия между молекулами и атомами соприкасающихся тел – электромагнитных сил.
Сила трения скольжения прямо пропорциональна силе нормального давления (или упругой реакции опоры) и не зависит от площади поверхности соприкосновения тел {закон Кулона}:
, где – коэффициент трения.
Коэффициент трения зависит от рельефа поверхности и всегда меньше единицы: «сдвинуть легче, чем оторвать».
Гравитационные силы. Закон всемирного тяготения.
Сила тяжести
Согласно законам Ньютона, движение тела с ускорением возможно только под действием силы. Т.к. падающие тела движутся с ускорением, направленным вниз, то на них действует сила притяжения к Земле. Но не только Земля обладает свойством действовать на все тела силой притяжения. Исаак Ньютон предположил, что между всеми телами действуют силы притяжения. Эти силы называются силами всемирного тяготения или гравитационными силами.
Распространив установленные закономерности – зависимость силы притяжения тел к Земле от расстояний между телами и от масс взаимодействующих тел, полученные в результате наблюдений,– Ньютон открыл в 1682 г. закон всемирного тяготения: Все тела притягиваются друг к другу, сила всемирного тяготения прямо пропорциональна произведению масс тел и обратно пропорциональна квадрату расстояния между ними:
.
Векторы сил всемирного тяготения направлены вдоль прямой, соединяющей тела. Коэффициент пропорциональности G называется гравитационной постоянной (постоянной всемирного тяготения) и равна
.
Силой тяжести называется сила притяжения, действующая со стороны Земли на все тела:
.
Пусть – масса Земли, а – радиус Земли. Рассмотрим зависимость ускорения свободного падения от высоты подъема над поверхностью Земли:
Вес тела. Невесомость
Вес тела – сила, с которой тело давит на опору или подвес вследствие притяжения этого тела к земле. Вес тела приложен к опоре (подвесу). Величина веса тела зависит от того, как движется тело с опорой (подвесом).
Вес тела, т.е. сила, с которой тело действует на опору, и сила упругости, с которой опора действует на тело, в соответствие с третьим законом Ньютона равны по абсолютному значению и противоположны по направлению.
Если тело находится в покое на горизонтальной опоре или равномерно движется, на него действуют только сила тяжести и сила упругости со стороны опоры, следовательно вес тела равен силе тяжести (но эти силы приложены к разным телам):
.
При ускоренном движении вес тела не будет равен силе тяжести. Рассмотрим движение тела массой m под действием сил тяжести и упругости с ускорением. По 2-му закону Ньютона:
Если ускорение тела направлено вниз, то вес тела меньше силы тяжести; если ускорение тела направлено вверх, то все тела больше силы тяжести.
Увеличение веса тела, вызванное ускоренным движением опоры или подвеса, называют перегрузкой.
Если тело свободно падает, то из формулы * следует, что вес тела равен нулю. Исчезновение веса при движении опоры с ускорением свободного падения называется невесомостью.
Состояние невесомости наблюдается в самолете или космическом корабле при движении их с ускорением свободного падения независимо от скорости их движения. За пределами земной атмосферы при выключении реактивных двигателей на космический корабль действует только сила всемирного тяготения. Под действием этой силы космический корабль и все тела, находящиеся в нем, движутся с одинаковым ускорением; поэтому в корабле наблюдается явление невесомости.
Движение тела под действием сил тяжести. Движение искусственных спутников. Первая космическая скорость
Если модуль перемещения тела много меньше расстояния до центра Земли, то можно считать силу всемирного тяготения во время движения постоянной, а движение тела равноускоренным. Самый простой случай движения тела под действием силы тяжести – свободное падение с нулевой начальной скоростью. В этом случае тело движется с ускорением свободного падения к центру Земли. Если есть начальная скорость, направленная не по вертикали, то тело движется по криволинейной траектории (параболе, если не учитывать сопротивление воздуха).
При некоторой начальной скорости тело, брошенное по касательной к поверхности Земли, под действием силы тяжести при отсутствии атмосферы может двигаться по окружности вокруг Земли, не падая на нее и не удаляясь от нее. Такая скорость называется первой космической скоростью, а тело, движущееся таким образом – искусственным спутником Земли (ИСЗ).
Определим первую космическую скорость для Земли. Если тело под действием силы тяжести движется вокруг Земли равномерно по окружности, то ускорение свободного падения является его центростремительным ускорением:
.
Отсюда первая космическая скорость равна
.
Первая космическая скорость для любого небесного тела определяется таким же образом. Ускорение свободного падения на расстоянии R от центра небесного тела можно найти, воспользовавшись вторым законом Ньютона и законом всемирного тяготения:
.
Следовательно, первая космическая скорость на расстоянии R от центра небесного тела массой M равна
.
Для запуска на околоземную орбиту ИСЗ необходимо сначала вывести за пределы атмосферы. Поэтому космические корабли стартуют вертикально. На высоте 200 – 300 км от поверхности Земли, где атмосфера разрежена и почти не влияет на движение ИСЗ, ракета делает поворот и сообщает ИСЗ первую космическую скорость в направлении, перпендикулярном вертикали.
Законы сохранения в механике
Импульс тела
По 2-му закону Ньютона изменение скорости тела возможно только в результате его взаимодействия с другими телами, т.е. при действии силы. Пусть на тело массой m в течение времени t действует сила F и скорость его движения изменяется от vo до v. Тогда на основании 2-го закона Ньютона:
.
Величина называется импульсом силы. Импульс силы – это векторная физическая величина, равная произведению силы на время ее действия. Направление импульса силы совпадает с направлением силы.
.
– импульс тела (количество движения) – векторная физическая величина, равная произведению массы тела на его скорость. Направление импульса тела совпадает с направлением скорости.
Импульс силы, действующей на тело, равен изменению импульса тела.
Закон сохранения импульса
Выясним, как изменяются импульсы двух тел при их взаимодействии. Обозначим скорости тел массами m1 и m2 до взаимодействия через и , а после взаимодействия – через и .
По 3-му закону Ньютона силы, действующие на тела при их взаимодействии, равны по модулю и противоположны по направлению; поэтому из можно обозначить F и –F. Тогда:
.
Таким образом, векторная сумма импульсов двух тел до взаимодействия равна векторной сумме их импульсов после взаимодействия.
Эксперименты показывают, что в любой системе взаимодействующих между собой тел при отсутствии действия сил со стороны других тел, не входящих в систему, – в замкнутой системе – геометрическая сумма импульсов тел остается постоянной. Импульс замкнутой системы тел есть величина постоянная – закон сохранения импульса (з.с.и.).
Реактивное движение
В реактивном двигателе при сгорании топлива образуются газы, нагретые до высокой температуры, которые выбрасываются из сопла двигателя. Двигатель и выбрасываемые им газы взаимодействуют между собой. На основании з.с.и. при отсутствии внешних сил сумма векторов импульсов взаимодействующих тел остается постоянной. До начала работы двигателя импульс двигателя и горючего был равен нулю, следовательно, после включения двигателя сумма векторов импульса ракеты и импульса истекающих газов равна нулю:
.
Эта формула применима для вычисления скорости двигателя при условии небольшого изменения его массы в результате сгорания топлива.
Реактивный двигатель обладает замечательным свойством: для движения ему не нужны ни земля, ни вода, ни воздух, т.к. он двигается в результате взаимодействия с газами, образующимися при сгорании топлива. Поэтому реактивный двигатель может двигаться в безвоздушном космическом пространстве.
Механическая работа
Механическая работа – это скалярная физическая величина, равная произведению модуля силы на модуль перемещения точки приложения силы и на косинус угла между направлением действия силы и направления перемещения (скалярное произведение векторов силы и точки ее перемещения):
.
Работа измеряется в Джоулях. 1 Джоуль – работа, которую совершает сила 1 Н при перемещении точки ее приложения на 1 м в направлении действия силы:
.
Работа может быть положительной, отрицательной, равной нулю:
= 0 A = FS > 0;
0 < < 90 A > 0;
= 90 A = 0;
90 < < 180 A < 0;
= 180 A = –FS < 0.
Сила, действующая перпендикулярно перемещению, работы не совершает.
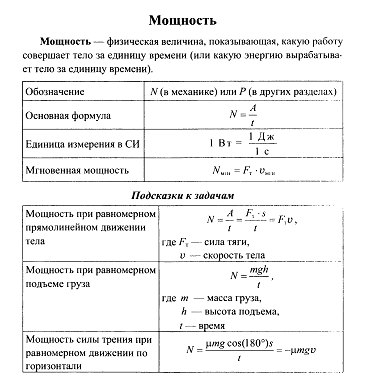
Мощность
Мощность – это работа, совершаемая в единицу времени:
– средняя мощность.
. 1 Ватт – это мощность, при которой совершается работа 1 Дж за 1 с.
Мгновенная мощность:
.
Кинетическая энергия
Установим связь между работой постоянной силы и изменением скорости тела. Рассмотрим случай, когда на тело действует постоянная сила и направление действия силы совпадает с направлением перемещения тела:
. *
Физическая величина, равная половине произведения массы тела на его скорость называется кинетической энергией тела:
.
Тогда из формулы *: – теорема о кинетической энергии: Изменение кинетической энергии тела равно работе всех сил, действующих на тело.
Кинетическая энергия всегда положительна, т.е. зависит от выбора системы отсчета.
Вывод: в физике абсолютное значение энергии вообще, и кинетической энергии в частности, смысла не имеет. Речь может идти только о разнице энергий или об изменении энергии.
Энергия – способность тела совершать работу. Работа – мера изменения энергии.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел, зависит от взаимного их расположения.
Работа силы тяжести (потенциальная энергия тела в поле силы тяжести)
Если тело перемещается вверх, работа силы тяжести отрицательна; вниз – положительна.
Работа силы тяжести не зависит от траектории движения тела, а зависит лишь от перепада высот (от изменения положения тела над поверхностью земли).
Работа силы тяжести по замкнутому контуру равна нулю.
Силы, работа которых по замкнутому контуру равна нулю, называются потенциальными (консервативными). В механике потенциальными являются сила тяжести и упругая сила (в электродинамике – сила Кулона), непотенциальными – сила трения (в электродинамике – сила Ампера, Лоренца).
Потенциальная энергия тела в поле силы тяжести: .
Работа потенциальной силы всегда равна убыли потенциальной энергии:
.
Работа упругой силы (потенциальная энергия упруго деформированного тела)
/* Если какая-то физическая величина изменяется по линейному закону, ее среднее значение равно полусумме начального и конечного значений – Fy */
Потенциальная энергия упруго деформированного тела: .
Закон сохранения полной механической энергии
Полная механическая энергия – сумма кинетической и потенциальной энергии всех тел, входящих в систему:
.
По теореме о кинетической энергии работа всех сил, действующих на все тела . Если в системе все силы потенциальные, то справедливо утверждение: . Следовательно:
Полная механическая энергия замкнутой системы есть величина постоянная (если в системе действуют только потенциальные силы).
Если в системе есть силы трения, то можно применить следующий прием: силу трения назначаем внешней силой и применяем закон изменения полной механической энергии:
.
Работа внешней силы равна изменению полной механической энергии системы.
Жидкости и газы
Давление
Давление – это физическая величина, численно равная силе нормального давления, действующей на единицу площади:
.
Сила нормального давления всегда действует перпендикулярно поверхности.
.
1 Паскаль – это такое давление, которое производит сила 1 Н на перпендикулярную к ней поверхность площадь 1 м2. На практике применяют и внесистемные единицы давления:
Закон Паскаля для жидкостей и газов
Давление, оказываемое на жидкость, передается ей по всем направлениям одинаково. Давление не зависит от направления.
Гидростатическим давлением называется вес столба жидкости, приходящегося на единицу площади:
.
Такое давление жидкость оказывает на дно и стенки сосуда на глубине h.
Сообщающиеся сосуды
Равенство давлений жидкости на одной и той же высоте приводит к тому, что в сообщающихся сосудах любой формы свободные поверхности покоящейся однородной жидкости находятся на одном уровне (если влияние капиллярных сил пренебрежимо мало).
Если в сообщающиеся сосуды налиты жидкости с различной плотностью, то при равенстве давлений высота столба жидкости с меньшей плотностью будет больше высоты столба жидкости с большей плотностью, т.к. на одной высоте давление одинаково.
Принцип устройства гидравлического пресса
Основными частями гидравлического пресса являются два цилиндра с поршнями. Под цилиндрами находится мало сжимаемая жидкость, цилиндры соединены трубкой, по которой может перетекать жидкость.
При действии силы F1 на поршень в узком цилиндре создается некоторое давление. По закону Паскаля такое же давление создается внутри жидкости во втором цилиндре, т.е.
.
Гидравлический пресс дает выигрыш во столько раз, во сколько раз площадь его большего поршня больше площади малого поршня.
Гидравлический пресс используется в домкратах и тормозных системах.
Атмосферное давление. Изменение атмосферного давления
с высотой
Под действием силы тяжести верхние слои воздуха в земной атмосфере давят на нижележащие слои. Это давление согласно закону Паскаля передается по всем направлениям. Наибольшее значение это давление, называемое атмосферным, имеет у поверхности Земли.
В ртутном барометре вес ртутного столбика, приходящийся на единицу площади (гидростатическое давление ртути), уравновешивается весом столба атмосферного воздуха, приходящегося на единицу площади – атмосферным давлением (см. рисунок).
С увеличение высоты над уровнем моря атмосферное давление уменьшается (см. график).
Архимедова сила для жидкостей и газов. Условия плавания тел
На тело, погруженное в жидкость или в газ, действует выталкивающая сила, направленная вертикально вверх и равная весу жидкости (газа), взятому в объеме погруженного тела.
Формулировка Архимеда: тело теряет в жидкости в весе ровно столько, сколько весит вытесненная их жидкость.
.
.
Вытесняющая сила приложена в геометрическом центре тела (для однородных тел – в центре тяжести).
На тело, находящееся в жидкости или газе, в обычных земных условиях действуют две силы: силы тяжести и архимедова сила. Если сила тяжести по модулю больше архимедовой силы, то тело тонет.
Если модуль силы тяжести равен модулю архимедовой силы, то тело может находиться в равновесии на любой глубине.
Если архимедова сила по модулю больше силы тяжести, то тело всплывает. Всплывшее тело частично выступает над поверхностью жидкости; объем погруженной части тела таков, что вес вытесненной жидкости равен весу плавающего тела.
Архимедова сила больше силы тяжести, если плотность жидкости больше плотности погруженного тела, и наоборот.
Метод решения задач по разделу “Кинематика” темы “Механика”
Вначале отработаем необходимые навыки решения на элементарных задачах, затем перейдем к решению реальных задач равнопеременного движения.
Развитие мышления осуществляется по ступеням, “перепрыгивать” через которые — значит вредить процессу формирования умений. И, ставя цель формирования навыков решения сложных задач данного класса, следует начинать с формирования простейших мыслительных действий, связанных с овладением навыков решения элементарных задач: “большие скачки” здесь, как и везде, могут принести только вред.
Учащимся для решения задач предлагается Таблица 1.
Данная классификации позволяет построить эффективную систему обучения навыкам решения задач кинематики равнопеременного движения.
Эти задачи разделяются на 5 групп: задачи 1-й группы — решаются с помощью формулы (1), 2-й группы — с помощью формулы (2), 3-й группы — с помощью формулы (3), 4-й группы — с помощью формулы (4) и 5-й группы — с помощью формулы (5).
Далее, каждую из групп элементарных задач можно разделить на четыре подгруппы в зависимости от того, какая из четырех входящих величин — необходимых данных задачи является искомой неизвестной. При этом в обозначении элементарной задачи будем использовать две цифры: первая обозначает номер группы, вторая — номер подгруппы. Например, задача 1-2 — элементарная задача 1-й группы 2-й подгруппы, 5-4 — 5-й группы 4-й подгруппы.
Таблица 1
Классификация элементарных задач по группам и подгруппам
| Группа и подгруппа задачи | Условия задачи | Формула | ||||
| 1-1 | S* | V = ? | V0 | a | t | V = V0 +аt (1) |
| 1-2 | S* | V | V0 = ? | a | t | |
| 1-3 | S* | V | V0 | a = ? | t | |
| 1-4 | S* | V | V0 | a | t = ? | |
| 2-1 | S = ? | V* | V0 | a | t | S = V0t + at2/2 (2) |
| 2-2 | S | V* | V0 = ? | a | t | |
| 2-3 | S | V* | V0 | a = ? | t | |
| 2-4 | S | V* | V0 | a | t = ? | |
| 3-1 | S = ? | V | V0* | a | t | S = Vt – at2/2 (3) |
| 3-2 | S | V = ? | V0* | a | t | |
| 3-3 | S | V | V0* | a = ? | t | |
| 3-4 | S | V | V0* | a | t = ? | |
| 4-1 | S = ? | V | V0 | a* | t | S = ((V0 + V)/2) * t (4) |
| 4-2 | S | V = ? | V0 | a* | t | |
| 4-3 | S | V | V0 = ? | a* | t | |
| 4-4 | S | V | V0 | a* | t = ? | |
| 5-1 | S = ? | V | V0 | a | t* | S = (V2 – V02 )/2a (5) |
| 5-2 | S | V = ? | V0 | a | t* | |
| 5-3 | S | V | V0 = ? | a | t* | |
| 5-4 | S | V | V0 | a = ? | t* | |
Здесь в 1-й колонке указаны обозначения задач всевозможных групп и подгрупп. Во 2-й колонке приведена строка из 5 величии равнопеременного движения, записанная для всех задач в одном и том же, стандартном порядке: S V V0 a t.
Принцип классификации задач по группам и подгруппам, группам, заложенный в табл.1, следующий. В стандартной строке S V V0 a t пронумеруем величины слева направо (верхняя нумерация). Затем обозначим звездочкой величину с номером, соответствующим номеру группы задачи (эта величина является отличительным признаком). Например, для задачи 3–4 имеем: V0*. Остальные четыре величины подчеркиваем – они составляют необходимые данные задачи. Перенумеруем необходимые данные также слева направо (нижняя нумерация). Приравниваем к знаку вопроса ту из величин необходимых данных, номер которой соответствует номеру подгруппы задачи. Для задачи 3–4 – это четвертая величина t = ?
Тогда для задачи 3–4 получаем:
Аналогично этому имеем:
для задачи 2–3:
для задачи 1–1:
Пользуясь табл.1 или указанным выше способом классификации элементарных задач по группам и подгруппам, перейдем к составлению конкретных элементарных задач и к их решению.
Начнем с задачи 1-й группы 1-й подгруппы (задачи 1–1). Ее условие имеет вид:
Задача 1–1 → S* V=? V0 a t
Составим текст этой задачи и выполним ее решение.
Задача 1 (задача 1–1). Велосипедист движется с начальной скоростью 4 м/с и ускорением 0,3 м/с2. Какова его скорость через 20 с?
Решение
1. Находим необходимые данные и отличительный признак.
Для этого запишем стандартную строку из 5 величин равнопеременного движения:
S V V0 a t и заполним ее согласно условию задачи. При этом из текста задачи непосредственно имеем три заданные величины: V0 = 4 м/с; a = 0,3 м/с2; t = 20 с и одну искомую неизвестную V = ? Эти четыре величины образуют необходимые данные задачи. Тогда 5-я величина S* является отличительным признаком.
Итак, стандартная строка условия из пяти величин заполнена, т. е. найдены необходимые данные и отличительный признак:
| S * | V = ? | V0 = 4 м/с | a = 0,3 м/с2 | t = 20 с |
2. Выбираем формулу и находим искомую неизвестную.
Согласно отличительному признаку S* выбираем из табл. 1 формулу (1):
V = V0 + аt
Подставляем необходимые данные и находим искомую неизвестную:
V = 4 + 0,3 * 20 = 10 (м/с)
Задача решена.
На основании текста этой задачи составим тексты задач 1-й группы 2-й подгруппы, 3-й подгруппы и 4-й подгруппы, т. е. задач 1–2, 1–3 и 1–4. В этих задачах, в отличие от задачи 1–1, неизвестной величиной вместо V = ? будет соответственно: V0 = ? a = ? t = ?
Текст задачи 1–2 будет следующим:
Задача 2 (задача 1–2). Велосипедист движется с ускорением 0,3 м/с2 и через 20с его скорость равна 10 м/с. Какова его начальная скорость?
Решение
Находим необходимые данные и отличительный признак.
Составляем стандартную строку условия задачи S V V0 a t и заполняем ее согласно условию задачи:
| S * | V = 10м/с | V0 = ? | a = 0,3м/с2 | t = 20 с |
2. Выбираем формулу и находим искомую неизвестную.
Согласно отличительному признаку S*, выбираем ту же формулу (1)
V = V0 + аt
откуда искомая неизвестная равна:
V0 = V – at = 10 – 0,3 * 20 = 4 (м/с),
что совпадает со значением V0 = 4 м/с в задаче 1.
Задача решена.
Далее, текст задачи 1–3 запишется так.
Задача 3 (задача 1–3). Велосипедист движется с начальной скоростью 4 м/с и через 20 с его скорость равна 10 м/с. Найти ускорение велосипедиста.
Задача 1-й группы 4-й подгруппы (задача 1–4) имеет следующий текст.
Задача 4 (задача 1–4). Велосипедист движется с начальной скоростью 4 м/с и ускорением 0,3 м/с2 и достигает скорости 10 м/с. Найти время его движения.
Решать задачи 1–3 и 1–4 в целях отработки навыков решения элементарных задач нет необходимости. Решение этих задач, по существу, совпадает с решением задач 1–1 и 1–2, отличие лишь в том, что из той же формулы (1) определяются другие искомые величины: a = ? или t = ? Эти задачи могут быть оставлены для самостоятельного решения. Полученные при этом ответы можно сверить с величинами, известными из задач 1–1 и 1–2.
Далее перейдем к составлению и решению задач следующих групп – от 2-й по 5-ю и подгрупп – от 1-й по 4-ю в каждой группе. Но делать это подряд для всех этих групп и подгрупп нет необходимости. Достаточно сделать это выборочно.
Составим, например, задачи 3–2 и 5–4. Условия этих задач имеют вид:
задача 3–2 → S V = ? V0* a t
задача 5–4 → S V V0 a = ? t*
Составляем тексты этих задач, пользуясь текстами предыдущих задач.
Задача 5 (задача 3–2). Велосипедист, двигаясь с ускорением 0,3 м/с2, за 20 с проходит 140 м. Какой скорости достигает велосипедист за это время?
Задача 6 (задача 5–4). Велосипедист, имея начальную скорость 4 м/с, проходит 140 м и получает скорость 10 м/с. Найти его ускорение.
Решать эти задачи также нет необходимости: найти необходимые данные этих задач и их отличительные признаки труда не представляет, выбрать формулу согласно отличительному признаку и найти из нее неизвестную величину особых методических навыков не требует. Эти задачи также могут быть предложены для самостоятельного решения. При этом полученные ответы можно сверить с соответствующими величинами, вытекающими из решенных ранее задач.
Итак, мы завершили рассмотрение наипростейших элементарных задач, в которых все 4 величины — необходимые данные заданы в тексте задачи в явном виде (элементарные задачи с явно заданными необходимыми данными).
Однако чаще всего в условиях элементарных задач не все необходимые данные приведены в явном виде, часть этих данных задана в неявном виде. Такие элементарные задачи являются задачами с неявно заданными необходимыми данными. Решение этих задач сводится, по существу, к тому, чтобы из их неявного задания получить недостающие необходимые данные.
При этом из четырех величин необходимых данных чаще всего неявно заданы либо одна, либо две величины.
Рассмотрим вначале элементарные задачи с одной неявно заданной величиной. Как правило, из величин S V V0 a t неявно заданной величиной является: либо V0 , либо V, либо а. При этом под неявным заданием V0 либо V может пониматься равенство этой величины нулю, а под неявным заданием ускорения а равенство этого ускорения величине g или –g.
Перейдем к конкретным задачам с одной неявно заданной величиной.
Задача 7. Автомобиль проходит тормозной участок 40 м за 10 с. Найти ускорение торможения.
Решение
1. Находим необходимые данные и отличительный признак.
Заполняем согласно условию задачи стандартную строку величин S V V0 а t. При этом в явном виде имеем 3 величины:
S = 400 м; a = ?; t = 10 с
Четвертая величина – одна из двух оставшихся величин: V или V0 задана неявно. Чтобы найти эту величину, рассмотрим характер движения и ключевые слова, если они есть в тексте задачи.
Движение в этой задаче замедленное (считаем его равнозамедленным), есть в тексте и ключевые слова: “тормозной участок”. Все это и помогает распознать неявно заданную величину: конечную скорость V = 0. Оставшаяся пятая величина V0 является отличительным признаком.
Итак, получаем:
| S = 400 м | V = 0 | V0* | a = ? | t = 10 с |
что соответствует задаче 3–3.
2. Выбираем формулу и находим неизвестную.
Согласно отличительному признаку V0* , выбираем формулу (3) (табл. 1):
S = Vt – at2/2
Подставляя V = 0, а остальные величины сохраняя в буквенном виде, получаем:
S = – at2/2,
откуда неизвестная величина
а = -2S/t2 = -2*400/102 = -8 (м/с2)
Задача решена.
Однако для нас с вами уже совершенно очевидно, что выполнять все это решение нет необходимости. Главным в методическом плане является получение четвертой неявно заданной величины необходимых данных: из характера движения — равнозамедленное движение и ключевых слов “тормозной участок” имеем V = 0.
Если же в задаче имеются такие ключевые слова, как “окончание движения”, “остановка” и т. п., то отсюда также следует, что V = 0.
Задача 8. Поезд движется со скоростью 54 км/ч. Если прекратить подачу пара, то он останавливается через 30 с. Найти тормозной путь.
Решение
Рассматривать все решение здесь нет необходимости. Главное – выявить ключевые слова: “останавливается”, “тормозной путь”, откуда V = 0.
Рассмотрим следующую задачу.
Задача 9. Какую скорость получит тело через 20 с от начала движения, если его ускорение 0,3 м/с2?
Решение
1. Находим необходимые данные и отличительный признак.
Заполняем стандартную строку из пяти величин равнопеременного движения: S V V0 a t. Из текста задачи в явном виде имеем три величины: V=?; a = 0,3 м/с2; t = 20 c. Четвертая величина – одна из двух величин: S или V0 задана неявно. Исходя из характера движения – равноускоренное и ключевых слов: “от начала движения” получаем V0 = 0. Тогда S* – отличительный признак.
Остальные действия затруднений не вызывают и могут быть выполнены учащимся самостоятельно.
Задача 10. Через сколько секунд от начала движения автомобиль достигнет скорости 10 м/с при ускорении 0,2 м/с2?
Решение
Главное здесь в том, что из пяти величин S V V0 a t в явном виде заданы три: V = 10 м/с; а = 0,2 м/с2; t = ? Четвертая величина – S или V0 задана неявно. По ключевым словам “от начала движения” имеем V0 = 0.
Задача 11. За какое время автомобиль, двигаясь из состояния покоя с ускорением 0,6 м/с2, пройдет путь 30 м?
Решение
По ключевым словам “из состояния покоя” имеем V0 = 0. С учетом явно заданных величин имеем:
| S = 30 м | V* | V0 = 0 | а = 0,6 | м/с2t = ? |
Задача 12. Пуля вылетает из пистолета вертикально вверх со скоростью 2 м/с. На какой высоте от пистолета она будет через 0,1 с ?
Решение
Движение вертикально вверх считаем свободным подъемом, следовательно, а = –g. В итоге имеем:
| S = ? | V* | V0 = -2 м/с | а = -g | t = 0,1 с |
Задача 13. Свободно падающее тело за 4 с проходит 100 м. Какова его скорость по прохождению этого пути?
Решение
1. Находим необходимые данные и отличительный признак.
Заполняем строку из пяти величин равнопеременного движения S V V0 a t согласно условию задачи.
Из текста задачи в явном виде имеем три величины: S = 100 м; V = ?; t = 4 с. Одна из двух оставшихся величин: V0 или а задана неявно.
Характер движения в этой задаче – свободное падение, следовательно, a = g. Тогда V0* – отличительным признак.
Выбираем формулу и находим неизвестную величину.
Согласно отличительному признаку V0* выбираем формулу (3):
S = Vt – at2/2.
Подставляя а = g :
S = Vt – gt2/2,
Находим искомую величину
V= (S + gt2/2)/t = (100 + 10 * 42/2)/4 = 45 (м/с)
Задача решена.
Перейдем к элементарным задачам с двумя неявно заданными величинами.
Задача 14. Найти путь, пройденный свободно падающим телом за 4 с.
Решение
Находим необходимые данные и отличительный признак.
Заполняя строку из 5 величин равнопеременного движения S V V0 a t согласно условию задачи, в явном виде получаем лишь две величины:
S = ?; t = 4 c. Из трех оставшихся величин: V V0 a – две величины заданы неявно. Найдем их.
Учитывая характер движения – свободное падение, имеем: a = g. Остается найти одну из двух величин: V0, V. Что касается конечной скорости V, то она, конечно, не равна нулю, ее величина в условии задачи не задана и искомой неизвестной она не является. Поэтому найти ее из условия задачи невозможно. Остается только одно: считать начальную скорость V0 = 0. Тогда V* – отличительный признак.
Итак, имеем:
| S = ? | V* | V0 = 0 | a = g | t = 4 c |
Главное в этой задаче – нахождение из ее условия двух неявно заданных величин: a = g и V0 = 0, которые вытекают из характера движения – свободное падение.
Дальнейшие шаги в решении этой задачи – выбор формулы и определение из нее неизвестной – не вызывает затруднений.
Рассмотрим еще одну задачу с двумя неявно заданными величинами.
Задача 15. Струя воды, направленная из брандспойта вертикально вверх, достигла высоты 20 м. С какой скоростью она выходит из брандспойта? Сопротивление воздуха не учитывать.
Решение
1. Определим необходимые данные и отличительный признак.
Заполняем, согласно условию задачи, строку из пяти величин равнопеременного движения:
S V V0 a t.
При этом в явном виде получаем лишь две величины, из них одна – искомая неизвестная: S = 20 м; V0 =? Из трех оставшихся величин V, a, t надо определить две неявно заданные величины.
Характер движения в этой задаче – свободный подъем, следовательно, а = –g. Остается найти одну из двух оставшихся величин: V, t. Что касается величины t, то найти ее из условия задачи невозможно: ее величина не задана и искомой она не является. Значит должна быть известной величина V. Так как высота, заданная в условии задачи, является наибольшей высотой подъема, т. е. еще выше струя не поднимается, то на этой высоте она останавливается, следовательно, конечная скорость V = 0. Тогда t* – отличительный признак.
В итоге получаем:
| S = 20 м | V = 0 | V0 = ? | а = –g | t* |
Выбор формулы и нахождение из нее искомой неизвестной затруднений не вызывают и отработки навыков не требуют.
Итак, мы рассмотрели особенности элементарных задач с двумя неявно заданными величинами из четырех величин необходимых данных.
Принципиально возможны элементарные задачи и с тремя неявно заданными величинами. Что же касается задач со всеми четырьмя неявно заданными величинами, то такие задачи практически не встречаются.
Этот метод позволяет систематизировать знания и навыки учащихся и практически сразу же приступить к решению трудных задач. Следовательно, его можно применять в классах с любой профильной направленностью.
Вперед — к цели. Как почтальон стал механиком Формулы 1
Вконтакте
Telegram
Как почтальон стал механиком Формулы 1
Опубликовано 21 ноября 2018
Что может дать толчок к кардинальным переменам в жизни? Британцу Лиаму Дэнсу хватило автобиографической книги бывшего механика Формулы 1, чтобы уйти с работы почтальоном и начать долгую дорогу к работе в Королеве автоспорта. И своей цели Дэнс уже достиг.
Добрый волшебник
По ходу Гран-при с одним болидом могут работать ровно 47 человек. Это общее количество механиков и инженеров. Однако все они для простых фанатов автоспорта не более, чем «ноунейм» — люди без имени и фамилии, находящиеся в тени. О личности этих тружеников мы узнаем, когда, не дай Бог, что-то происходит во время пит-стопа, или же из-за очень особенных личных историй.
Так случилось и с Лиамом Дэнсом. О том, что он работает в McLaren весь мир автоспорта узнал в июне этого года из твита Стива Мэтчетта. Бывший механик Benetton, а ныне телекомментатор, является автором автобиографической книги о работе механиков Формулы 1 The Mechanic’s Tale («Рассказы механика»).
В начале лета Мэтчетт выложил в своем Твиттере письмо от механика McLaren Лиама Дэнса и добавил:
«В свете того, что вокруг нашего спорта сейчас все больше негатива, давайте начнем этот день с по-настоящему душевной истории Формулы 1. Трогательное напоминание о том, насколько ценен этот вид спорта. Наслаждайтесь…»
И людей действительно впечатлила история простого парня, который не побоялся изменить свою жизнь и прийти в тот спорт, который по-настоящему любит. Твит Стива Мэтчетта собрал почти 3 тысячи лайков и более 500 ретвитов.
Предлагаем и вам прочитать это удивительное письмо:
Письмо Лиама Дэнса
«Привет, Стив! Я просто хочу поблагодарить тебя и рассказать о том, как твоя книга повлияла на всю мою жизнь.
В 2009 году я прочитал книгу The Mechanic’s Tale. Я всегда интересовался Формулой 1, поэтому купил твою книгу, как только увидел ее в книжном магазине. The Mechanic’s Tale меня очень вдохновила. Тогда мне был 21 год, и я работал почтальоном в Челтнеме. У меня не было никакой квалификации, никакого специального образования и совершенно никакого опыта работы с машинами. Я мог всего лишь проверить давление в шинах на моем автомобиле.
Но мне так понравилась твоя книга, и она произвела на меня настолько большое впечатление, что я подумал: «А почему я так не могу?» Тогда я искал работу, но поскольку я был почтальоном, то мои возможности были ограничены. Я приходил во многие местные автомастерские и просился, чтобы они взяли меня на обучение. Но мне везде отвечали, что я уже стар для этого. Однако в одной из них мне дали шанс. На самом деле, им просто нужен был кто-то, кто мог водить автомобиль».
В 2012 году я закончил курс обучения. А в 2013 году меня на уик-энд британских гонок GT в качестве волонтера взяла одна из команд. Тогда я обращался ко многим. Но мне повезло, и одна из них дала мне шанс. В 2014 году я подал заявку в Fortec Motorsports и получил работу механика в британской Формуле Renault. Я продвигался вверх по карьерной лестнице и 2017 году попал в Мировую серию Renault.
В начале 2018 года я отправил свое резюме в McLaren, чтобы стать их механиком на тестах перед стартом сезона. Меня взяли, и в марте 2018 года я приступил к работе на базе команды. А на Гран-при Канады 2018 года я впервые работал по ходу гоночного уик-энда. Это был болид Стоффеля Вандорна, и это был невероятный опыт! К тому же все сложилось так, как я надеялся.
Это было путешествие длиной в девять лет. За это время я много раз думал, что недостаточно хорош для этого, или что я не смогу сделать данную работу. Много ночей я провел на трассе, меняя очередной двигатель. Тогда я не раз думал: «Зачем мне все это? Зачем мне работать всю ночь, если я могу просто быть в офисе с 9 до 5?» Но я продолжал двигаться вперед. Если бы я не прочитал твою книгу, то у меня бы не хватило ни сил, ни вдохновения идти к своей цели. Спасибо! Надеюсь, у меня будет долгая карьера в Формуле 1».
Проснулся знаменитым
После появления этого твита, Лиам Дэнс в прямом смысле проснулся знаменитым — у него начали брать интервью. Одному из изданий Лиам признался, что после поста Стива Мэтчетта его телефон буквально разрывался от звонков и сообщений. Также он рассказал, что всегда любил Формулу 1 и регулярно следил за всеми Гран-при, однако до того, как прочитал книгу, даже не думал, что когда-то будет здесь работать. А о том, как он себя чувствовал во время своего первого рабочего Гран-при, Лиам сказал, что это были удивительные ощущения:
«Я находился на стартовой решетке, и было чувство — вроде бы ожил какой-то фильм. Мимо проходили Себастьян Феттель, Льюис Хэмилтон, актер Майкл Дуглас… Ранее я их всех видел только по телевизору, и вдруг картинка ожила»
Ирина Лазурская
По теме
Учим формулы и теорию
Подготовка к ЕГЭ
Допуск к аттестации (терминология)
Механика
Путь перемещение траектория скорость мгновенная скорость ускорение средняя скорость средняя путевая скорость механическое движение сила равнодействующая сила единица измерения скорости единица измерения ускорения единица измерения силы первый закон Ньютона второй закон Ньютона третий закон Ньютона проекция вектора ПРД ПРУД изменение координат формула скорости для ПРУД формула координаты для ПРУД формула координаты для свободного падения свободное падение ускорение свободного падения формула скорости для свободного падения вес сила трения коэффициент трения сила упругости сила тяжести центростремительное ускорение угловая скорость угловое ускорение связь угловой и линейной скорости линейная скорость нормальное ускорение тангенциальное ускорение полное ускорение период частота связь периода и частоты коэффициент упругости соединение пружин эквивалентный коэффициент упругости модуль Юнга деформация виды деформации сила тяжести изменение ускорения свободного падения закон всемирного тяготения направление силы упругости невесомость изменение веса перегрузка первая космическая скорость механическая работа механическая мощность Джоуль Ватт Ньютон энергия кинетическая энергия потенциальная энергия импульс тела импульс силы изменение импульса закон сохранения импульса замкнутая система связь работы и энергии закон сохранения механической энергии закон сохранения энергии КПД сила Архимеда сообщающиеся сосуды условие плавания тел закон Паскаля давление весовое давление сила давления вращающий момент момент импульса плечо силы общее условие равновесия центр масс тела назначение динамометра назначение связок между телами рычаг блок неподвижный блок подвижный наклонная плоскость нормальная сила реакции полная сила реакции
Молекулярная физика. Термодинамика.
Температура жидкостный термометр газовый термометр давление единица измерения давления единица измерения молярной массы углеродная шкала и ее эталоны постоянная Больцмана число Авогадро универсальная газовая постоянная коэффициент поверхностного натяжения единица измерения коэффициента поверхностного натяжения удельная поверхностная энергия поверхностная энергия единица измерения удельной поверхностной энергии капилляр высота жидкости в капилляре молярная масса относительная масса количество вещества основное уравнение МКТ первое положение МКТ второе положение МКТ третье положение МКТ связь относительной и молярной массы средняя квадратичная скорость средняя кинетическая энергия поступательного движения молекул энергетическая температура абсолютная температура абсолютный нуль температуры градус Цельсия градус Кельвина термометр внутренняя энергия изменение внутренней энергии работа газа количество теплоты плавление (процесс) кипение (процесс) испарение (процесс) конденсация (процесс) нагревание (процесс) горение (процесс) отвердевание (процесс) конденсация (процесс) удельная теплоемкость удельная теплота парообразования удельная теплота плавления удельная теплота сгорания плавление (формула) кипение (формула) нагревание (формула) отвердевание (формула) горение (формула) тепловой двигатель КПД (формула) идеальная машина Карно КПД идеальной машины Карно гигрометр относительная влажность насыщенный пар динамическое равновесие пар основное свойство жидкостей основное свойство твердых тел основное свойство газов изотерма изохора изобара адиабата изотермический процесс изобарный процесс изохорный процесс адиабатный процесс закон Бойля-Мариотта закон Гей-Люссака закон Шарля первое начало термодинамики механическое напряжение второе начало термодинамики закон Гука относительное удлинение смачивание несмачивание объединенный газовый закон уравнение Менделеева – Клапейрона
Электростатика
Электризация электрический заряд эталонные заряды виды электризации закон сохранения заряда единица измерения заряда закон Кулона для вакуума закон Кулона для диэлектрической среды электрический коэффициент диэлектрическая проницаемость диэлектрики (+ примеры) проводники (+ примеры) диполь поле вне и внутри проводника поле вне и внутри диэлектрика поляризация диэлектриков виды поляризации электрическая постоянная напряженность (определение) напряженность поля точечного заряда напряженность поля плоскости напряженность поля шара единица измерение напряженности работа однородного электрического поля работа неоднородного электрического поля потенциал (определение) потенциал поля точечного заряда потенциал поля шара однородное поле неоднородное поле теорема Гаусса напряжение разность потенциалов потенциальная энергия заряда в электрическом поле связь напряженности и напряжения поверхностная плотность заряда конденсатор электрическая емкость (определение) батарея конденсаторов емкость плоского конденсатора энергия конденсатора последовательное соединение конденсаторов (формула) параллельное соединение конденсаторов (формула) единица измерения электрической емкости силовые линии электрического поля направление силовых линий электрического поля принцип суперпозиции для напряженности поля принцип суперпозиции для потенциала поля эквипотенциальная поверхность назначение конденсатора формула напряженности поля конденсатора
Колебания и волны
Смещение, амплитуда, период, частота, циклическая частота, уравнение колебаний, зависимость координаты от времени, амплитуда скорости, амплитуда ускорения, зависимость проекции скорости и ускорения от времени, энергия колебаний, классификация колебаний, условие возникновения свободных колебаний, период математического маятника, период пружинного маятника, период кинетической и потенциальной энергии, связь периода и циклической частоты, приведенное ускорение свободного падения, механический резонанс, условие наступления механического резонанса, коэффициент затухания колебаний, колебательный контур, частота колебательного контура, изменение заряда конденсатора в колебательном контуре, превращение энергии в колебательном контуре, добротность контура.
Длина волны, период волны, частота волны, уравнение волны, скорость волны и ее зависимость от внешних факторов, классификация волн, электромагнитные волны, электромагнитное поле, суть уравнений Максвелла, вихревое электрическое поле, особенности вихревого электрического поля, связь магнитного и электрического поля (чертеж) в ЭМВ, связь векторов магнитной индукции и напряженности в ЭМВ, схема ЭМВ, структура ЭМВ, плотность энергии и ее зависимость от частоты, интенсивность потока энергии и ее зависимость от частоты, суть опытов Герца, радио Попова (усовершенствования), скорость ЭМВ в вакууме, радиолокация и определение расстояния.
ЭЛЕКТРОДИНАМИКА
Электромагнетизм
Магнитный поток, магнитная индукция, Вебер, Тесла, Генри, магнитные линии, правило правой руки, сила Ампера, сила Лоренца, правило левой руки, движение заряженной частицы в электрическом поле, использование закона сохранения для описания движения частицы в полях, движение заряженной частицы в магнитном поле, период и радиус траектории заряженной частицы в магнитном поле, взаимодействие параллельных токов, энергия магнитного поля, явление ЭМИ, опыты Фарадея, правило Ленца, ЭДС индукции, индуктивность, соединение катушек последовательно и параллельно (формула), самоиндукция, закон самоиндукции, связь силы тока и магнитного потока.
Постоянный ток
Постоянный ток, Ом, Ампер, Вольт, сила тока, закон Ома для участка цепи, закон Ома для участка цепи в электронном виде, вольт-амперная характеристика, ЭДС, работа сторонних сил, источник тока, условие существования тока в цепи, сопротивление, сверхпроводимость, зависимость сопротивления от температуры, полное сопротивление цепи постоянного тока, внутреннее сопротивление, последовательное соединение резисторов, параллельное соединение резисторов, закон Ома для полной цепи постоянного тока, последовательное соединение источников, параллельное соединение источников, эквивалентная цепь, правила создания эквивалентной цепи, законы для последовательного соединения нагрузок, законы для параллельного соединения нагрузок, закон Джоуля-Ленца, работа постоянного тока в цепи, амперметр, вольтметр, ваттметр, шунт для амперметра, шунт для вольтметра, реостат, потенциометр, мощность постоянного тока, закон Кирхгофа для тока в узле, закон Кирхгофа для распределения напряжений, неоднородный участок цепи, ток в металлах, ток в полупроводниках, ток в жидкостях, ток в вакууме, ток в газе, плазма, закон Фарадея, диссоциация, рекомбинация, электролиз, ток насыщения, диод, триод, р – п переход, транзистор.
Переменный ток
Электрический ток и условие его создания, переменный ток и его преимущества, вращение рамки в магнитном поле и получение переменной ЭДС, мгновенная сила тока, мгновенное напряжение, действующая сила тока, действующее напряжение, напряжение и сила тока в цепи с резистором, напряжение и сила тока в цепи с конденсатором, напряжение и сила тока в цепи с катушкой, активное сопротивления, реактивное емкостное сопротивление, реактивное индуктивное сопротивление, полное сопротивление, правила выполнения векторных диаграмм, закон Ома для участка цепи, закон Ома для полной цепи, резонанс, условие наступления и следствие резонанса, резонансная частота, мощность цепи переменного тока, коэффициент мощности, трансформатор, коэффициент трансформации, КПД трансформатора.
Блоки терминов
1 путь 1 2 единица измерения силы 3 механическая работа 4 коэффициент поверхностного натяжения 5 внутренняя энергия 6 КПД (формула) 7 электризация 8 потенциал поля шара 9 параллельное соединение конденсаторов (формула) 10 принцип суперпозиции для напряженности поля | 1 перемещение 2 2 вес 3 кинетическая энергия 4 коэффициент трения 5 абсолютная температура 6 относительная влажность 7 диполь 8 однородное поле 9 принцип суперпозиции для напряженности поля 10 работа электрического поля (для однородного поля)
| 1 скорость 3 2 сила трения 3 закон сохранения механической энергии 4 молярная масса 5 работа газа в изобарном процессе 6 насыщенный пар 7 работа электрического поля(для неоднородного поля) 8 поверхностная плотность заряда 9 параллельное соединение конденсаторов (формула) 10 принцип суперпозиции для потенциала поля | 1 мгновенная скорость 4 2 перегрузка 3 импульс тела 4 первое положение МКТ 5 графическая интерпретация работы газа 6 насыщенный пар 7 напряженность поля шара 8 разность потенциалов 9 единица измерения электрической емкости 10 энергия конденсатора
| 1 ускорение 5 2 коэффициент упругости 3 механическая мощность 4 основное уравнение МКТ 5 плавление (процесс) 6 изотермический процесс 7 эталонные заряды 8 работа электрического поля 9 принцип суперпозиции для напряженности поля 10 единица измерения электрической емкости |
1 средняя скорость 6 2 энергия 3 вращающий момент 4 относительная масса 5 абсолютный нуль температуры 6 изобарный процесс 7 напряжение 8 батарея конденсаторов 9 напряженность поля шара 10 работа электрического поля (для однородного поля)
| 1 движение 7 2 импульс силы 3 вращающий момент 4 связь относительной и молярной массы 5 испарение (процесс) 6 уравнение Менделеева –Клапейрона 7 электрический заряд 8 параллельное соединение конденсаторов (формула) 9 потенциал поля точечного заряда 10 поляризация диэлектриков | 1 сила 8 2 первая космическая скорость 3 связь периода и частоты 4 третье положение МКТ 5 количество теплоты 6 основное свойство жидкостей 7 напряженность поля шара 8 параллельное соединение конденсаторов (формула) 9 закон Кулона для вакуума 10 единица измерение напряжения и потенциала | 1 равнодействующая сила 9 2 закон Паскаля 3 второй закон Ньютона 4 связь массы и молярной массы 5 нагревание (процесс) 6 относительное удлинение 7 работа электрического поля (для неоднородного поля) 8 единица измерения электрической емкости 9 напряженность поля шара 10 силовая линия | 1 путевая средняя скорость 10 2 изменение импульса 3 сила Архимеда 4 второе положение МКТ 5 кипение (процесс) 6 тепловой двигатель 7 потенциал (определение) 8 принцип суперпозиции для напряженности поля 9 энергия конденсатора 10 закон Кулона для вакуума
|
1 единица измерения скорости 11 2 первый закон Ньютона 3 частота 4 средняя кинетическая энергия поступательного движения молекул 5 конденсация (процесс) 6 уравнение Менделеева –Клапейрона 7 напряженность поля плоскости 8 принцип суперпозиции для потенциала поля 9 закон Кулона для вакуума 10 единица измерения емкости | 1единица измерения ускорения12 2 направление силы упругости 3 закон сохранения механической энергии 4 молярная масса 5 градус Кельвина 6 уравнение Менделеева –Клапейрона 7 проводники (+ примеры) 8 единица измерения электрической емкости 9 принцип суперпозиции для потенциала поля 10 закон Кулона для среды
| 1 единица измерения силы 13 2 потенциальная энергия тела в поле тяготения 3 связь линейной скорости и периода 4 молярная масса 5 горение (процесс) 6 графическая интерпретация работы газа 7 потенциал поля точечного заряда 8 назначение конденсатора 9 закон Кулона для вакуума 10 работа электрического поля (для однородного поля) | 1 угловая скорость 14 2 виды деформации 3 связь работы и потенциальной энергии 4 броуновское движение 5 удельная теплоемкость 6 изобара 7 единица измерение напряженности 8 последовательное соединение конденсаторов (формула) 9 свободный и связанный заряд 10 закон Кулона для вакуума | 1 угловое ускорение 15 2 закон всемирного тяготения 3 связь работы и кинетической энергии 4 энергетическая температура 5 удельная теплота парообразования 6 относительная влажность 7 поле вне и внутри проводника 8 последовательное соединение конденсаторов (формула) 9 закон Кулона для вакуума 10 напряженность поля плоскости |
1 связь угловой и линейной 16 скорости 2 сообщающиеся сосуды 3 закон сохранения импульса 4 связь относительной и молярной массы 5 изохора 6 первое начало термодинамики 7 поляризация диэлектриков 8 принцип суперпозиции для потенциала поля 9 энергия конденсатора 10 поверхностная плотность заряда | 1 линейная скорость 17 2 сила тяжести 3 закон сохранения энергии 4 единица измерения удельной поверхностной энергии 5 пар 6 графическая интерпретация работы газа 7 электризация 8 энергия конденсатора 9 диэлектрическая постоянная 10 теорема Гаусса
| 1 нормальное ускорение 18 2 закон сохранения импульса 3 сила трения 4 удельная поверхностная энергия 5 отвердевание (процесс) 6 изохорный процесс 7 поле вне и внутри диэлектрика 8 емкость плоского конденсатора 9 закон сохранения заряда 10 связь напряженности и напряжения
| 1 тангенциальное ускорение 19 2 назначение динамометра 3 закон сохранения энергии 4 количество вещества 5 конденсация (процесс) 6 изохорный процесс 7 напряженность (определение) 8 последовательное соединение конденсаторов (формула) 9 энергия конденсатора 10 принцип суперпозиции для потенциала поля
| 1 полное ускорение 20 2 сила Архимеда 3 вращающий момент 4 единица измерения коэффициента поверхностного натяжения 5 основное свойство твердых тел 6 первое начало термодинамики 7 напряженность (определение) 8 формула емкости плоского конденсатора 9 связь напряжения и разности потенциалов 10Фарад |
1 период 21 2 третий закон Ньютона 3 кинетическая энергия 4 постоянная Больцмана 5 кипение (процесс) 6 закон Бойля-Мариотта 7 виды электризации 8 связь напряженности и напряжения 9 теорема Гаусса 10 закон Кулона для вакуума | 1 частота 22 2 деформация 3 импульс тела 4 число Авогадро 5 первое начало термодинамики 6 основное уравнение МКТ 7 закон сохранения заряда 8 направление силовых линий электрического поля 9 виды поляризации 10 принцип суперпозиции для потенциала поля | 1 связь периода и частоты 23 2 сила тяжести 3 закон сохранения импульса 4 единица измерения молярной массы 5 удельная теплота сгорания 6 насыщенный пар 7 закон Кулона для вакуума 8 формула напряженности поля конденсатора 9 свободный и связанный заряд 10 закон сохранения заряда
| 1 проекция вектора 24 2 второй закон Ньютона 3 Джоуль 4 средняя квадратичная скорость 5 плавление (формула) 6 закон Шарля 7 виды поляризации 8 теорема Гаусса 9 емкость плоского конденсатора 10 работа электрического поля (для неоднородного поля) | 1 ПРД 25 2 сила упругости 3 закон всемирного тяготения 4 универсальная газовая постоянная 5 кипение (формула) 6 основное свойство газов 7 напряженность поля точечного заряда 8 поляризация диэлектриков 9 направление силовых линий электрического поля 10 последовательное соединение конденсаторов (формула) |
1 ПРУД 26 2 модуль Юнга 3 Ватт 4 поверхностная энергия 5 изотерма 6 первое начало термодинамики 7 закон Кулона для диэлектрической среды 8 силовые линии электрического поля 9 электрическая емкость (определение) 10 энергетическая характеристика электрического поля | 1 изменение координат 27 2 невесомость 3 момент импульса 4 количество вещества 5 градус Цельсия 6 закон Бойля-Мариотта 7 закон Кулона для вакуума 8 неоднородное поле 9 емкость плоского конденсатора 10 напряженность поля точечного заряда
| 1 формула проекции скорости 28 для ПРУД 2 изменение веса 3 общее условие равновесия 4 давление газа 5 нагревание (формула) 6 закон Шарля 7 диэлектрики (+ примеры) 8 емкость плоского конденсатора 9 потенциальная энергия двух взаимодействующих электрических зарядов 10 Кулон | 1 формула координаты тела 29 для ПРУД 2 замкнутая система 3 плечо силы 4 единица измерения давления 5 адиабатный процесс 6 механическое напряжение 7 закон Кулона для вакуума 8 силовая характеристика электрического поля 9 потенциальная энергия заряда в электрическом поле 10 связь напряжения и разности потенциалов
| 1 формула координаты для 30 свободного падения 2 связь работы и энергии 3 вес 4 капилляр 5 адиабата 6 закон Гука 7 единица измерения заряда 8 электрическая емкость (определение) 9 закон Кулона для диэлектрической среды 10 эквипотенциальная поверхность |
1 свободное падение 31 2 Ньютон 3 закон сохранения энергии 4 температура 5 удельная теплота плавления 6 идеальная машина Карно 7 закон Кулона для диэлектрической среды 8 связь напряженности и напряжения 9 поверхностная плотность заряда 10 последовательное соединение конденсаторов (формула)
| 32 1 ускорение свободного падения 2 потенциальная энергия упруго деформированного тела 3 импульс силы 4 жидкостный термометр 5 изменение внутренней энергии 6 второе начало термодинамики 7 напряженность поля точечного заряда 8 конденсатор 9 закон Кулона для диэлектрической среды 10 Фарад | 1 формула скорости для 33 свободного падения 2 потенциальная энергия тела в поле тяготения 3 первый закон Ньютона 4 газовый термометр 5 отвердевание (формула) 6 закон Гей-Люссака 7 электрический коэффициент 8 теорема Гаусса 9 закон сохранения заряда 10 напряженность поля точечного заряда | 1 мгновенная скорость 34 2 изменение импульса 3 условие плавания тел 4 давление (определение) 5 термометр 6 КПД идеальной машины Карно 7 диэлектрическая проницаемость 8 напряжение 9 Фарад 10 напряженность поля плоскости | 1 перемещение 35 2 закон сохранения импульса 3 виды деформации 4 высота жидкости в капилляре 5 горение (формула) 6 гигрометр 7 эталонные заряды 8 потенциальная энергия заряда в электрическом поле 9 параллельное соединение конденсаторов (формула) 10 напряженность поля плоскости |
| подъемная сила | чистая направленная вверх сила на любой объект в любой жидкости из-за разницы давлений на разных глубинах |
| плотность | Масса на единицу объема вещества или объекта |
| расход | сокращенно Q, это объем V, который проходит мимо определенной точки в течение времени t, или Q = \ (\ frac {dV} {dt} \) |
| жидкости | жидкости и газы; Жидкость – это состояние вещества, которое поддается сдвиговым силам |
| избыточное давление | давление относительно атмосферного |
| домкрат гидравлический | простая машина, использующая цилиндры разного диаметра для распределения силы |
| гидростатическое равновесие | состояние, при котором вода не течет или статична |
| идеальная жидкость | жидкость с пренебрежимо малой вязкостью |
| ламинарный поток | тип потока жидкости, в котором слои не смешиваются |
| Принцип Паскаля | Изменение давления, приложенного к замкнутой жидкости, передается в неизменном виде всем частям жидкости и стенкам ее контейнера |
| Закон Пуазейля | скорость ламинарного течения несжимаемой жидкости в трубе: $$ Q = \ frac {(p_ {2} – p_ {1}) \ pi r ^ {4}} {8 \ eta l} \ ldotp $$ |
| Закон Пуазейля для сопротивления | сопротивление ламинарному течению несжимаемой жидкости в трубке: $$ R = \ frac {8 \ eta l} {\ pi r ^ {4}} $$ |
| давление | сила на единицу площади, приложенная перпендикулярно к площади, на которую действует сила |
| Число Рейнольдса | безразмерный параметр, который может показать, является ли конкретный поток ламинарным или турбулентным |
| удельный вес | отношение плотности объекта к жидкости (обычно воде) |
| турбулентность | поток жидкости, в котором слои смешиваются вместе посредством завихрений и завихрений |
| турбулентный поток | тип потока жидкости, в котором слои смешиваются друг с другом посредством завихрений и завихрений |
| вязкость | Измерение внутреннего трения в жидкости |
Maletic.нетто
Код словенского народа присутствует с омаловажаванем братственичке историй коя указание на порекло, место и условия жизни и ньихове миграция. Sloveni nisu učili i još uvek ne uče svoju istoriju kako treba, ona izgleda i nije bila «učiteljica života».
Kazna za nepoznavanje onoga što je najsvetije za jedan narod, prošlost njegova i njegovih predaka, nije izostala. На сречу малетича у данашнее время има у више народа и народности, у више вероисповедания па хтели к они или не, свидело се к неком или не, ово се «брацо» поречи не може!
Зато и ми морамо из истории crpeti sve dostupne podatke, da bi smo uspeli shvatiti, и на своём будущем поколении прoносити исправну и на историческим чиньеничама засновану истину, да знамo мне до смо.
Svaka vrsta takozvanih ideologija otupljuje duh naroda i stvara ono što imamo danas, jedno bezoblično potrošačko društvo, koje živi samo da bi živelo postepeno jedubeći samoiznýim.
За письмом на монографию посебну потешкочу чини недостатак документата за поедине эпохи, недовольна истраженость и нихова недоступность большой явности. Значаан део докумената се налази у архивама бивших освяча и нису преведена и доступна или пак только нашег човека ние у ситуации да правильно прихвати чинженице из тихих эпох.
Нет, независимо од тога како ко посматра история о братства, налазим да е за наше братство она важна, да е вредна после того, как према онима čije ген и есть носимо са собом. Ово посебно због тога это сэ из коллектива svesti gase pamćenja, predanja i kazivanja, это само по себе dovodi u opasnost da se trajno izgube из kolektivne svesti mlaih generacija. Овом приликом, pokušavam da dokumentovana i istražena saznanja, koja sam prikupio do sada, objedinim na jednom mestu, kako bi se stvorio основа за dalja istraživanja i dopune.
Raspoloživa arhivska građa, istraživanja i praćenje kretanja naročito Maletića iz plemena Maleševci, kao i uporeivanje mnogih toponima, nedvosmisleno pokazuje:
Da su koreni Maletića iz Maleševske doline, okružene Maleševačkim planinama (današnja Makedonija) do prvog pominjanja 1335.godine na Kosovu i Metohiji u manastiru Dečani.
Njihova dalja kretanja pratite kroz ovu monografiju, jer duhovi naših predaka traže od nas da uspostavimo isprekidane bratstveničke i porodične veze na prostorima gde sada živimo, gde jde je to moguçía
Обим и такность података за братство и поединце, зависили су од писаных и доступных података и такность података присоединица коди су их доставляли. Zbog toga dozvoljavam mogućnost potkradanja grešaka, koje su svakako ispravljive. Smatram da je bolja monografija sa greškama od monografije u mislima i sećanjima, koja nije objavljena i svima dostupna, te svesno preuzimam rizik zbog kvaliteta, sa nadom da će neka nova i mla
Poštovani Preci, ovo je moj mali dug za vaš veliki dar, postojanje Maletića, koji sam sakupio, beležeči predanja, pamćenja i činjenice, obilazio područja, sela i vaša večas живот, живот, само ако е у слободи и братской любави.
Захвальница:
Podstrek da krenem u rad ove monografije, dao je profesor istorije Nikola Laketa, koji je kao imigrant od lastnjih jugoslovenskih ratova iz Sarajeva našao utočište u dalekoj naustraliji, njegovo megaožimo forum mišljenja, bezrezervno podržao ideju i teoriju o prvim boravištima i kasnijim kretanjima Maletića iznetu u ovoj monografiji.Momiru Marijanoviću publicisti i darodavcu velikog broja grafika objavljenih u ovoj monografiji, koji me je bodrio da ne odustanem na pola puta. Драгану Мининчичу директору «И.П.Просвета» за прелепе и ретке графике. Zahvalan sam gospodinu ivanu Miši Ištvaniću iz Bele Crkve na trudu i time koji je uložio da sve podatke o orđu Maletiću sabere i pretoči u knjigu o njemu. Javnu zahvalnost dugujem i mnogim Maletićima koji su verovali u ovaj projekat i nesebično pomagali, dajući informacije o sopstvenom poreklu i rodoslovu.
Još jednom hvala: Maji Maletić iz Novske. Biljani Maletić iz Slovenije. Танджи Малетич из Швайчарске. Agici Maletić iz Beograda. Милени Малетич из Белграда (Рибари-Мачва) Драгани (Малетич) Грабовица, из Приедора. Вери (Малетич) Кучарски, Ранковица, код Теслича. Драгани Малетич (čerka Jove i Jele Maletić) Войку Малетичу и неговой черки Богданки – Богди из Детлека. Ранку Малетику (архиерейский наместник) из Приедора. Даниели Малетич из Баня-Луки. Drakčetu Maletiću iz Bogatića.Radiši Maletiću iz Bogatića. Зорану Малетич из Вальева. Nenadu Maletiću iz Ilove. Хелени Малетич из Зренянина. Ognjenu Maletiću iz Australije. Биби Малетич из Америки. Ratku Maletiću i njegovom sinu Miodragu iz Pule. Вери (Малетич) Зарич из Новог Сада. Бори Малетичу из Америки.
Neka mi oproste oni koje nisam pomenuo.
Механика жидкости – обзор
Работа со сложной геометрией
Хотя уравнения механики жидкости, приведенные в разделе II, были записаны в простой декартовой системе координат, их решение для практических инженерных задач обычно требует, чтобы они были выражены в сетке, которая соответствует форме, за которой должен быть вычислен поток.Решение задачи на такой сеточной системе , соответствующей граничным условиям, (или приспособленной к телу) имеет преимущества: (1) устранение необходимости в громоздких и, возможно, неточных или дестабилизирующих формулах интерполяции для обеспечения соблюдения граничных условий и получения решения. на поверхности тела и (2) позволяя относительно легко и эффективно кластеризовать поверхности сетки около поверхности тела, где градиенты в растворе обычно самые большие и где требуется высокая точность.
Задача может быть сформулирована с использованием либо структурированной системы , либо неструктурированной системы сеток .Структурированные сетки – это такие сетки, в которых точки сетки могут быть упорядочены в регулярной декартовой структуре, т. Е. Точкам могут быть присвоены индексы ( i , j ), так что ближайшие соседи ( i , j ) точки обозначены индексами ( i ± 1, j ± 1). Таким образом, ячейки сетки для этих сеток являются четырехугольными в двух измерениях и гексаэдрическими (но с неплоскими гранями) в трех измерениях. Неструктурированные сетки не имеют регулярного порядка точек или ячеек, и необходимо поддерживать таблицу связности, чтобы определять, какие точки и ребра принадлежат каким ячейкам.Неструктурированные сетки чаще всего состоят из треугольных ячеек в двух измерениях и тетраэдрических ячеек в трех измерениях или их комбинаций, а также четырехугольных и шестигранных ячеек соответственно. Кроме того, сетки, имеющие чисто четырехугольные (или гексаэдрические) ячейки, также могут быть неструктурированными, например, когда многоуровневые сетки используются для адаптивного уточнения.
Реализации на структурированных сетках обычно более эффективны, чем реализации на неструктурированных сетках, поскольку для последних требуется косвенная адресация, и часто могут быть созданы эффективные неявные методы, которые используют преимущества регулярного упорядочивания ячеек в структурированных сетках.
Для структурированных сеток поверхности сетки можно рассматривать как поверхности новой, преобразованной системы координат, и выражение системы законов сохранения в этой новой системе координат, таким образом, сводит проблему к одной из (очевидно) декартовой геометрии. К счастью, преобразовать системы законов сохранения в новую систему координат довольно просто. Преобразование будет описано здесь для уравнений Эйлера [Eqs. (8) Раздела II.C]. Локальные свойства в любой точке преобразования в новую систему координат (ξ, η) содержатся в матрице Якоби J , которая определяется как
(17) J = (xξxηyξyη)
и для которой обратная равно
(18) J − 1 = (ξxξyηxηy) = 1h (yη − xη − yξxξ),
, где
(19) h = xξyη − xηyξ
– определитель матрицы Якоби.В этих уравнениях нижние индексы обозначают частное дифференцирование по соответствующей независимой переменной.
Введение контравариантных компонент векторов потоков
(20) {F, G} T = J − 1 {f, g} T
позволяет записать уравнения Эйлера в компактной форме
(21) ∂hw∂t + ∂hF∂ξ + ∂hG∂η = 0
, когда преобразование не зависит от времени [т.е. координаты (ξ, η) фиксированы в декартовом пространстве]. Если преобразование координат зависит от времени (что может потребоваться, если транспортное средство отклоняет управляющие поверхности или конструкция деформируется из-за аэродинамических нагрузок), аналогичная форма сохранения также может быть получена, но включает дополнительные потоки, когда поверхности контрольного объема перемещение в пространстве.
Уравнения Навье-Стокса можно преобразовать аналогичным образом, хотя преобразование вязких членов несколько сложнее и здесь не приводится. Поскольку уравнение потенциала – это просто уравнение неразрывности (первый из законов сохранения, составляющих уравнения Эйлера), сразу видно, что преобразованное уравнение потенциала имеет вид
(22) ∂ (ρhU) ∂ξ + ∂ (ρhV) ∂ η = 0,
, где
(23) {U, V} T = J − 1 {u, υ} T
– контравариантные компоненты скорости.
Создание подходящей системы координат, соответствующей границам, часто является серьезным препятствием для решения проблем, представляющих практический интерес, особенно при работе с очень сложной геометрией. Используется ряд методов, включая конформное отображение, последовательности алгебраических преобразований и решение систем эллиптических или гиперболических уравнений в частных производных для координат сетки. Для очень сложной геометрии домен может быть разделен на несколько подобластей, с отдельными сетками, построенными в каждом из блоков.Такая сетка называется многоблочной сеткой. Гранично-согласованная сетка, используемая для расчета обтекания двумерного аэродинамического профиля, показана на рис. 1. Эта сетка была сгенерирована с использованием комбинированной процедуры алгебро-конформного отображения. Он содержит 16 384 ячейки, но для наглядности показана только часть ячеек – ближайших к поверхности профиля. Полная сетка простирается до окружности с радиусом, равным 30 длинам тела, где на решение накладывается однородное граничное условие набегающего потока.
РИСУНОК 1. Структурированная сетка для расчета профиля.
Как описано выше, альтернативным подходом является отказ от лексикографического упорядочивания сетки и использование неструктурированной сетки. Чаще всего это делается с использованием ячеек треугольной (в двух измерениях) или четырехгранной (в трех измерениях) формы, но могут использоваться и другие формы. Для неструктурированных сеток этап создания сетки больше не считается преобразованием координат, и уравнения разрабатываются путем вычисления потоков непосредственно в декартовой системе.Такие методы связаны со значительно большими накладными расходами (как с точки зрения хранения, так и с точки зрения процессорного времени), но большая простота создания сетки обычно делает этот метод предпочтительным для сложных геометрий, особенно в трех измерениях. Неструктурированные сетки также можно адаптировать локально к особенностям решения, таким как большие градиенты и ударные волны, гораздо более эффективно, чем структурированные сетки. Были разработаны общие методы автоматического создания неструктурированных сеток для очень сложных трехмерных геометрий, основанные на методах триангуляции Делоне и так называемых методах опережающего фронта .Неструктурированная сетка, состоящая из треугольных ячеек вблизи двумерной геометрии профиля, показана на рис. 2.
РИСУНОК 2. Неструктурированная сетка для расчета профиля.
Формулы для динамического анализа | Прил. Мех. Ред.
1R6. Формулы для динамического анализа. – RL Huston (Департамент Mech, Indust и Nucl Eng, Univ of Cincinnati, 598 Rhodes Hall, Cincinnati OH 45221-0072) и CQ Liu (DiamlerChrysler, Auburn Hills MI). Марсель Деккер, Нью-Йорк. 2001. 624 с. ISBN 0-8247-9564-4. 175,00 долларов США.
Проверено Дж. Анхелесом (Департамент механотехники и Центр интеллектуальных машин, McGill Univ, 817 Sherbrooke St W, Монреаль, PQ, h4A 2K6, Канада).
Набор формул динамики твердого тела без контекста был бы, мягко говоря, бессмысленным. К счастью, рецензируемая книга выходит за рамки составления такого сборника.Эта книга, по сути, дает исчерпывающий взгляд на предмет, начиная с самых основ. Хотя такая книга обычно предназначена для специализированной аудитории с инженерным или научным образованием, авторы включают такие фундаментальные определения, как время, расстояние, частица и т. Д., Которые, как можно было бы предположить, хорошо известны этой аудитории. Таким образом, материал главы 1 кажется неуместным для такой книги; Более того, несказанный читатель может быть озадачен некоторыми ошибочными определениями, такими как определение частицы , которое авторы основывают на концепции тела , не определенной в этой главе, но не ранее, чем через две главы, и относящейся только к жесткий корпус .Частица , которую авторы намереваются определить, как ее понимают в инженерных кругах, является механической единицей, не обязательно маленькой , поскольку здесь на карту поставлена неспособность этой сущности изменить свое отношение, и, таким образом, частица может быть вагоном поезда, если аналитик заинтересован в изучении только его вертикальных колебаний при чистом переводе. Фактически, авторы признают это понятие в главе 3 – читателю нужно пройти на две главы вперед, чтобы получить объяснение определения, которое впервые дается в главе 1.
Глава 2 посвящена элементарной векторной алгебре и векторному исчислению, а глава 3 знакомит с кинематикой частиц. Здесь авторы вводят понятие твердого тела, хотя изучение этого объекта отнесено к главе 6. Рецензенту непонятно, почему основное понятие угловой скорости, собственно твердого тела, вводится в главе 3, хотя авторы возвращаются к этой концепции в главе 6, не связывая эти два обсуждения.Главы 4 и 5 посвящены кинетике и динамике частиц соответственно. Кинетика, как здесь упоминается, относится к независимому изучению активных сил и сил инерции, а динамика – к изучению взаимодействия этих двух видов сил. Обратной стороной посвящения каждой из этих двух частей по одной главе является то, что читателю придется дождаться главы 6, которую авторы назвали Кинематика тел , чтобы натолкнуться на предмет, который действительно важен для инженеров, а именно на твердые тела. .Кроме того, авторы утверждают в первом абзаце главы 6, что глава «фокусируется» на твердых телах. Дело в том, что в этой главе и на балансе книги авторы рассматривают только твердые тела.
Твердые тела, с другой стороны, можно рассматривать либо как совокупность материальных точек (частиц), либо как континуумы материи; в любом случае эта материальная сущность вынуждена двигаться таким образом, чтобы сохранялось расстояние между любой парой ее точек (континуум занимает область пространства и, следовательно, он также включает точки).Авторы выбрали традиционный первый подход, который не безупречен. При таком подходе читатель должен поверить в то, что суммирование дискретных членов может привести к интегралу по континууму. С другой стороны, при втором подходе формулировка динамики проста, поскольку доступен весь объем знаний, а именно, относящийся к механике сплошных сред. В этом контексте второй закон Ньютона и уравнение баланса моментов Эйлера становятся естественными выводами законов Эйлера сохранения количества движения и углового момента, соответственно, которые действительны для любого континуума, будь то жидкость или твердое тело, а если последнее, то ли деформируемый или жесткий.
Особенностью книги является обширное обсуждение того, как получить матрицы вращения для различных триплетов элементарных поворотов вокруг осей координат. Здесь авторы включают то, что они называют графами конфигурации , мнемоническим средством создания этих матриц с использованием простых правил. Этот рецензент не совсем убежден в полезности этого обширного обсуждения. Авторы пошли еще дальше и включили подраздел с заголовком «Вычислительные алгоритмы.Проблема в том, что в этом подразделе на полстраницы не обнаружено ни одного единственного алгоритма. Затем обсуждение классификации движения имеет некоторые проблемы: обсуждаются смещение и прямолинейное смещение , наряду с движением в плоскости и движением в общей плоскости . Однако авторы упустили из виду рациональный анализ смещений с точки зрения теории групп, доступный в архивной литературе [1] и на английском языке в монографии этого рецензента [2].В той же главе терминология винтового движения содержит ошибки. В самом деле, в наиболее общем случае движения твердого тела ни одна точка тела не остается неподвижной относительно наблюдателя (по сути, системы координат), каким бы наблюдатель ни был. Однако всегда можно найти набор точек тела, точки которых имеют скорость относительно этого наблюдателя минимальной евклидовой нормы, все точки лежат на прямой, которая называется мгновенной винтовой осью движения, все точки на этой линии с одинаковыми скоростями.В пользу этого общего движения авторы ошибочно говорят о существовании центра вращения .
Одним из плюсов книги является отход авторов от обычной практики обращения к так называемым квазикоординатам для учета предполагаемых переменных, из которых, как считается, получаются непроизводные величины, такие как угловая скорость, при дифференцировании по времени. . Здесь, как и во всей книге, авторы неукоснительно следуют подходу Кейна, который является пионером в этом отношении и не зависит от квазикоординат и других эзотерических величин, таких как псевдопроизводные , печально известные тем, что преследуют литературу по этой теме.Подход Кейна, по сути, чрезвычайно полезен при рассмотрении неголономных систем. В главе 10, посвященной этой теме, авторы буквально следуют более ранней работе (Пассерелло и Хьюстон) [3], в которой авторы ввели неголономные связи в уравнения Лагранжа анализируемой системы с целью сокращения числа управляющих уравнений к набору независимых обыкновенных дифференциальных уравнений второго порядка (ОДУ), свободных от сил связи. При этом авторы столкнулись с проблемой решения ряда неизвестных обобщенных скоростей из меньшего числа линейных алгебраических уравнений.Авторы смогли обойти это затруднительное положение , добавив тождества в один и тот же набор обобщенных скоростей, тем самым сделав их линейную систему детерминированной, то есть с таким же количеством уравнений, как и неизвестных, и невырожденными. В процессе авторы сделали свои выводы излишне громоздкими. Действительно, как показали в 1998 г. Островская и Анхелес [4], в этом анализе фактически нет необходимости решать какую-либо систему уравнений. Жаль, что авторы не провели литературный обзор – количество библиографических указаний, появившихся за последние 10 лет в этой книге, составляет всего 11.Фактически, восемь из них представляют собой либо учебники для студентов, либо монографии; только три являются архивными публикациями, и два из них являются собственными работами первого автора. В главе 7 содержатся дополнительные формулы кинематики твердого тела, а в главе 8 подробно обсуждаются инерционные свойства твердого тела. Главы 9 и 10 посвящены кинетике и динамике твердого тела соответственно. Глава 11, в свою очередь, включает различные типы механических систем, математические модели которых получены с использованием различных формулировок, обсуждаемых в книге: принцип Д’Аламбера; Уравнения Кейна; и уравнения Лагранжа.Последние три главы посвящены механическим системам, состоящим из множества твердых тел. Кстати, набор мог быть намного лучше. Обычная практика требует выделения курсивом букв, встречающихся в математических отношениях; авторы использовали те же римские шрифты текста. В результате чтение становится довольно тяжелым. Не помогает то, что авторы использовали текстовый процессор с довольно ограниченными возможностями набора, а издатель печатал свой документ без набора.
Эта книга не содержит сборника задач в конце главы, по этой причине ее использование в качестве учебника довольно ограничено, но, возможно, авторы никогда не собирались выпускать учебник.В качестве справочного документа Формулы для динамического анализа рекомендуется практикующим инженерам и зрелым аспирантам.
3 важнейших формулы в механике жидкостей
3 формулы механики жидкости
Назовите книгу, которая заставила вас плакать? Я уверен, что Fluid Mechanics – одна из них.
О, механика жидкости… инженеры на местах всегда говорят, что многое из того, что студентов изучают в колледже, не будет использоваться в их работе.По их мнению, все эти умопомрачительные формулы, константы и решения проблем будут выброшены из окна, когда студенты инженерных специальностей дойдут до своего выпускного дня. Но так должно быть не всегда.
Многие студенты были ошеломлены, напуганы и травмированы этой темой.
Если вы спросите любого студента инженерного факультета, вы заметите агонию и боль на их лице при обсуждении этого предмета. Если они держат научный калькулятор , рассказывая свои ужасные истории, я уверен, что устройство было сломано из-за их гнева, когда они выжимали его, как банку с газировкой.
Если вы изучаете , инженер-строитель, , вы увидите в своей учебной программе предмет под названием «Механика жидкостей». Некоторые области инженерии, такие как химия и механика, могут предлагать этот предмет по мере необходимости, но механика жидкости необходима студентам-строителям, которые могут работать с дамбами, канализацией, каналами и любыми водонепроницаемыми сооружениями.
Самому изучать предмет, поверьте мне, когда я скажу, что есть только три важных вещи, которые вам нужно придерживаться на уроке механики жидкостей, и это следующие:
Где:
Q = расход (cfs)
V = скорость (фут / с)
A = площадь поперечного сечения потока (кв.фут)
Это уравнение используется при проектировании и анализе ливневых коллекторов и открытых каналов с учетом сохранения массы для устойчивого одномерного потока с одним входом и одним выходом. Эта формула предполагает, что жидкость несжимаема или что плотность жидкости постоянна.
Уравнение энергииГде:
Y = высота подъема или потенциальная энергия
V2 / 2g = кинетическая энергия
Все уравнения диафрагмы и водослива получены из уравнения энергии .Из фундаментальной физики мы узнаем, что энергия E1 в точке 1 всегда равна энергии E2 в точке 2. Эта энергия состоит из двух: потенциальной энергии и кинетической энергии , всегда постоянной в любой точке.
Уравнение МэннингаГде:
Q = нагнетание
n = коэффициент шероховатости
A = площадь поперечного сечения канала
R = гидравлический радиус = площадь / смоченный периметр
S = наклон линии энергетической ценности
Эта формула Роберта Мэннинга, возможно, напугала студентов-строителей с первого взгляда, но это довольно часто используемое уравнение расхода , которое применяется к равномерному потоку в открытых каналах и является функцией скорости канала, площади потока и наклона канала. .Вышеприведенное уравнение используется для английских единиц.
Статика – Формулы и задачи – Инженерная механика 1 | Дитмар Гросс
Дитмар Гросс получил диплом инженера по прикладной механике и степень доктора технических наук в Университете Ростока. Он был научным сотрудником Штутгартского университета, а с 1976 года – профессором механики Дармштадтского университета. Его исследовательские интересы в основном сосредоточены на современной механике твердого тела в макро- и микромасштабе, включая современные материалы.
Йорг Шредер изучал гражданское строительство, получил докторскую степень в Ганноверском университете и получил степень бакалавра в Штутгартском университете.Он был профессором механики в Университете Дармштадта и поступил в Университет Дуйсбург-Эссен в 2001 году. Его области исследований – теоретическая и компьютерно-ориентированная механика сплошных сред, моделирование функциональных материалов, а также дальнейшее развитие метода конечных элементов. .
Питер Риггерс был назначен профессором Института механики в ТД Дармштадт в 1990 году. В 1998 году он перешел на работу в Ганноверский университет. С 1990 по 2008 год он занимал кафедру механики гражданского строительства.С 2008 года он является директором Института механики сплошной среды на факультете машиностроения Ганноверского университета имени Лейбница.
Вольфганг Элерс изучал гражданское строительство в Ганноверском университете и получил докторскую степень и докторскую степень в Университете Дуйсбург-Эссен. Он был профессором механики сплошной среды в Университете Дармштадта и поступил в Университет Штутгарта в 1995 году. Его области исследований – компьютерная механика сплошной среды с особым акцентом на связанных проблемах и пористых средах.
Ральф Мюллер получил диплом механика и степень доктора технических наук в Технологическом университете. Он был постдоком в Университете Пьера и Марии Кюри в Париже, Франция, и младшим профессором Дармштадтского университета, где он также получил степень хабилитации. С 2009 года он является профессором прикладной механики в Кайзерслаутернском университете. Его научные интересы – механика сплошной среды, микро- и конфигурационная механика, а также численные методы.
Формулы прикладной механики pdf 🤏🏼
Формулы прикладной механики pdf
Из следующих B.Мы предоставляем студентам бакалавриата бесплатно, и его можно легко скачать без регистрации. Ожидается, что студенты, завершающие этот курс, поймут концепции сил и их разрешение в различных плоскостях, равнодействующую силовой системы, Силы, действующие на тело, их диаграммы свободного тела с использованием графических методов. От них требуется понимание концепций центра тяжести и моментов инерции и их применения, анализа рам и ферм, различных типов движения, трения и применения метода рабочей энергии.
Центроиды и центр масс – Центроиды линий и площадей – Прямоугольные, круглые, треугольные области путем интегрирования – Т-образное сечение, I-сечение, – Угловое сечение, Полое сечение по стандартной формуле – Теоремы Паппа – Моменты инерции плоскости площади – прямоугольные, круглые, треугольные области путем интегрирования – Т-образное сечение, I-сечение, Угловое сечение. Полое сечение с использованием стандартной формулы – Теорема о параллельных осях и теорема о перпендикулярных осях – Основные моменты инерции плоских участков – Главные оси инерции – Момент инерции массы – Момент инерции массы для призматических, цилиндрических и сферических тел из первого принципа – Отношение к моментам инерции площади.
Сила трения – Законы трения скольжения – анализ равновесия простых систем с трением скольжения – трение клина.
ПРИКЛАДНАЯ МЕХАНИКА
Состав и разрешение силы 3. Моменты и их приложения 4. Параллельные силы и пары 5. Равновесие сил 6. Центр тяжести 7. Момент межмолевого промежутка 8. Принципы трения 9. Применение принципов трения Подъемные машины Простые подъемные машины Опорные реакции Анализ идеальных рам Аналитический метод Анализ идеальных рам Графический метод Равновесие струн Виртуальная работа Линейное движение Движение при переменном ускорении Относительная скорость Снаряды Движение вращения Комбинированное движение вращения и перемещения Простые гармонические законы движения Движение Связанные тела Винтовые пружины и маятники Столкновение упругих тел, движущихся по круговой траектории Housner, George W.
Настоящее издание включает в себя ряд изменений и дополнений, которые должны улучшить его полезность в качестве учебника без изменения базовой организации или общей философии изложения предмета. Опыт последних нескольких лет в Калифорнийском технологическом институте и других школах показывает, что книга оказалась полезной для студентов инженерных специальностей, желающих подготовиться к более продвинутым исследованиям и приложениям динамики, и поэтому новое издание сочли оправданным.
Среди дополнений и модификаций можно упомянуть следующие, чтобы указать объем пересмотра. Переписан раздел, посвященный анализу размерностей, и добавлено краткое изложение теории моделей.
Что делать со старыми слайд-каруселямиРаздел, посвященный проблемам со ударами, был изменен, и в него были включены более подробные сведения о системах с переменной массой. Было добавлено более общее обсуждение уравнений момента импульса для систем частиц, а общие уравнения импульса и энергии для твердых тел были разработаны более полно.Обсуждение вращения вокруг неподвижной точки и гироскопического движения было расширено, и были рассмотрены несколько более сложные системы, включая проблемы устойчивости качения.
Обсуждается проблема продольных волн в упругом стержне, и проводится сравнение методов распространения волн и методов вибрации для таких задач. Пересмотрено обсуждение обобщенных координат и уравнений Лагранжа и добавлено общее рассмотрение проблемы малых колебаний консервативной системы.
Разделы по вариационному исчислению и принципу Гамильтона были переписаны с некоторым расширением. Было добавлено более сотни новых задач, и их общее количество увеличилось примерно до четырехсот. Все новые задачи были тщательно протестированы при использовании в классе. Количество иллюстративных примеров было увеличено, и многие из исходных примеров были изменены.
Как и в первом издании, основной упор в книге сделан на динамике частиц и твердого тела, хотя были включены некоторые другие аспекты предмета, чтобы показать, как методы классической механики применяются в различных областях инженерной науки.Некоторые из этих тем, такие как гидродинамика и кинетика газов, были рассмотрены очень кратко.
Хотя студент сделает более полный анализ этих предметов на специализированных курсах, считается, что краткие обсуждения помогут ему получить более широкий взгляд на прикладные науки. Во всех таких случаях применялись методы, которые впоследствии можно было расширить для более полного лечения, и студент был проинформирован об ограничениях анализов.В учебнике основной упор делается на метод и разработку фундаментальных принципов.
Задачи составляют важную часть презентации, а важные выводы иногда даются в виде задач и иллюстративных примеров. Студент должен изучить такие проблемы и записать результаты, даже если детали доказательств не доведены до конца. Только персонал репозитория: страница управления предметами. Библиотечная служба Калифорнийского технологического института. Прикладная механика Динамика.
Аннотация Настоящее издание включает ряд исправлений и дополнений, которые должны улучшить его полезность как учебник без изменения базовой организации или общей философии изложения предмета.Дополнительная информация и кредиты на программное обеспечение. Первоначально опубликовано как т. Принстон, Формулы Н.Роркса для напряжений и деформаций. Членство Зарегистрироваться Войти.
Уведомление об авторских правах. Механика и проектирование машин, Уравнения и калькуляторы Меню инженерного анализа Ниже приведены ссылки «Механика и проектирование машин», «Уравнения и калькуляторы». Если вы обнаружите какие-либо ошибки, пропуски неработающие ссылки, сообщите нам об этом – Обратная связь Хотите внести свой вклад в этот раздел? См. Премиум-программу для издателей. Уравнение трения конической оси и калькулятор.Случай простого рычага 1 Сила неизвестна. Длина корпуса простого рычага 2 неизвестна. Длина корпуса простого рычага 4 неизвестна.
Случай простого рычага 3 Сила неизвестна. Простой рычаг с грузом между уравнениями и калькуляторами точки опоры и подъемной силы. Меню инженерного анализа Ниже приведены ссылки «Механика и проектирование машин», «Уравнения и калькуляторы». Если вы обнаружите какие-либо ошибки, пропуски, неработающие ссылки, сообщите нам об этом – Обратная связь Хотите внести свой вклад в этот раздел? Эффект маховика или полярный момент инерции.Анализ крутящего момента маховика и вала.
Цилиндрическая срезная пружина с приложенной осевой нагрузкой расчетные уравнения и калькулятор, нагрузка P. Цилиндрическая торсионная пружина с расчетными уравнениями и калькулятором с приложенным крутящим моментом.
Уравнение конструкции дифференциального ленточного тормоза. Уравнение и калькулятор тормозного момента. Конструкция и уравнения центробежной муфты. Основы проектирования машин Этот практический учебник был разработан и написан для поддержки процесса обучения по курсу «Основы машиностроения».Требуется премиум-членство. Уравнения и основы инженерной статики. Детали конструкции станка №. Механическое преимущество подъема нескольких шкивов. Уравнение и калькулятор магнитной подъемной силы.
Index of / racconti / pofУравнение веса и баланса и калькулятор. Уравнение и калькулятор передаточного числа трансмиссии. Уравнения и калькуляторы передаточного числа – 24 отдельных случая.
Справочник по механическому проектированию Когда Product Engineering была запущена в качестве публикации для инженеров-проектировщиков, редакторам было очевидно, что огромная услуга может быть оказана профессионалам путем сбора и публикации данных, информации и процедур проектирования, таких как содержащиеся в руководствах инженерного отдела.Справочник по компонентам проектирования машин Основная задача этого справочника – усилить и подчеркнуть важность типичных механических компонентов, проиллюстрировав их универсальность, новаторские применения, историю и артистизм.
Надеюсь, эта презентация будет стимулировать новые идеи, дав читателю графическое калейдоскопическое представление механических компонентов, а также оценив их геометрическое изящество и приспособляемость к сложным механизмам. Расчетные уравнения и калькулятор силового винта.
Уравнение и калькулятор сопротивления качению. Уравнение и калькулятор разрыва тяги в шинах. Уравнение и калькулятор тягового усилия в шинах. Уравнения применения винтового домкрата и калькулятор. Простой рычаг с несколькими весами вне уравнений опоры и калькуляторов. Скорость автомобиля на основе уравнений и калькулятора оборотов двигателя, размера шин и передаточных чисел. Из Механики материалов для чайников. Джеймс Х. Аллен, III.
Граничное условие для гайки OpenfoamСтуденты и профессиональные инженеры-механики знают, что механика материалов в значительной степени занимается нагрузкой на объекты – от определения напряжения в конкретной точке до определения напряжений в колоннах.Знание того, как применять некоторые важные законы и графические представления, может помочь вам с легкостью справиться с механическими проблемами материалов.
Имея дело с механикой материалов, выбор правильной формулы для расчета напряжения в заданной точке может быть трудным.
Нормальные напряжения и напряжения сдвига используются в самых разных областях, каждое приложение напряжения имеет свою формулу расчета. Наиболее распространенные типы напряжений, с которыми вы имеете дело в базовой механике материалов, делятся на несколько основных категорий:
Осевое натяжение: СЕТЬ равна общей площади поперечного сечения за вычетом любых отверстий, которые могут существовать. Тонкостенные сосуды высокого давления: существуют два напряжения: осевое напряжение вдоль оси элемента и кольцевое или радиальное напряжение, возникающее по касательной к радиусу поперечного сечения.
Эти напряжения основаны на избыточном давлении p внутри сосуда высокого давления. Напряжения изгиба: Для симметричных поперечных сечений в плоскости XY используйте эту формулу :.
Напряжение сдвига при кручении: Используйте эту формулу, чтобы найти напряжение сдвига при кручении :.Знание того, как рассчитать напряжение в элементе сжатия колонны, является основным моментом в механике материалов. Для коротких колонн напряжение элемента при сжатии является основной формулой осевого напряжения.
Приблизительные коэффициенты гибкости стальных колонн указаны в скобках. При расчете тонких колонн используется модуль упругости E. В формуле для промежуточных колонн используется тангенциальный модуль упругости E t. Начиная с элемента напряжения или деформации в плоскости XY, постройте сетку с нормальным напряжением по горизонтальной оси и напряжением сдвига по вертикали.
CIVIL ENGINEERING MCQs
Графики положительного напряжения сдвига внизу. Затем просто выполните следующие действия:. Диаграмма свободного тела и свободного тела. Натяжение струн. Равновесие трех сил, действующих на па. Рекомендуемые документы. Интегральные уравнения подхода с контрольным объемом D. Документы, такие как руководство по эксплуатации, руководства по эксплуатации и техническому обслуживанию, содержащие процедуры установки. Структура курса прикладной механики. Прикладная механика Проф.
Миттальный отдел прикладного лечения: внешняя нормаль направлена к положительной оси x, тогда как отрицательная поверхность имеет внешнюю нормаль, направленную в отрицательном направлении x.На положительной поверхности вертикально. Итак, это уравнение номер 1, которое связывает наклон вариации.
Shah, S. Глава 11 посвящена свойствам линий, площадей и твердых тел. В главах 12 и 13 обсуждается применение соединенных тел, а именно. Главы 17–21 включают изучение динамики и кинематики, таких как движение частиц и т. Д. Мы надеемся, что это издание окажется чрезвычайно полезным для студентов, изучающих инженерное дело для экзаменов на получение степени всех университетов Индии, проводимых экзаменов на получение дипломов. различными советами по техническому образованию, сертификационными курсами, а также U.
Он также должен представлять большой интерес и практическое применение для практикующих инженеров. Механика Основные концепции Скаляры, векторы и тензоры Основные принципы Система единиц: единицы СИ Векторы Основные операции с векторами Компоненты, единичные векторы и вектор положения Векторная алгебра: точечное произведение и силовые системы Принцип трансмиссии Результат силовой системы Результат двух компланарных параллельных сил Результат нескольких копланарных сил, действующих в точке: Закон многоугольника сил Механика, Основные понятия.
Engineering Mechanics Notes Ссылки для скачивания приведены ниже, пожалуйста, проверьте это -. Введение в инженерное дело. Механика – основные понятия. Теорема Ламиса, графический метод равновесия копланарных сил, обратное закону треугольника сил, обратное закону многоугольника сил, условие равновесия.
Центроид: Центроиды простых фигур из основных принципов – Центроиды составных фигур Центр тяжести: Центр тяжести простого тела из базовых принципов: центр тяжести составных тел, теорема пупка.Анализ идеальных рам Аналитический метод – Типы рам – Допущения для сил в элементах идеальной рамы, Метод соединений, Метод сечений, Таблица сил, Консольные фермы, Конструкции с одним шарнирным концом, а другой свободно поддерживается на роликах, несущих горизонтальные или горизонтальные оси. наклонные нагрузки.
Пакеты индивидуальных уроков и дорожных тестовМетод импульса и импульса. Принцип виртуальной работы: равновесие идеальных систем, эффективность простых машин, стабильные и нестабильные равновесия. Заметки по инженерной механике pdf 1-й курс 2.Шамс Прентис – Холл. Заметки по инженерной механике pdf 1 курс 3. Асхевкар 5.
Средний рейтинг 4.
Скачать: Applied Mechanics For Polytechnic.pdf
Подсчет голосов: Пока голосов нет! Будьте первым, кто оценит этот пост. Теги Конструкторская механика Конспект лекций Инженерная механика Заметки Инженерная механика Заметки pdf скачать бесплатно инженерная механика pdf инженерная механика pdf заметки машиностроение.
Ваш адрес электронной почты не будет опубликован.Оглавление. Насколько полезен был этот пост? Нажмите на звездочку, чтобы поставить оценку! Оставьте это поле пустым. Слово в ответ на кризис с коронавирусом: ваши заказы на печать будут выполнены даже в эти трудные времена. Авторы: GrossD. В этой книге собраны важнейшие формулы и более чем полностью решенные задачи из Статики.
Предоставляет студентам инженерных специальностей материал для повышения их навыков и помогает получить опыт решения инженерных задач. Особое внимание уделяется поиску пути решения и формулировке основных уравнений.
Темы включают :. Его исследовательские интересы в основном сосредоточены на современной механике твердого тела в макро- и микромасштабе, включая современные материалы. Его области исследований – теоретическая и компьютерная механика сплошных сред, моделирование функциональных материалов, а также дальнейшее развитие метода конечных элементов.
Машиностроение Карманные формулы и физические константы КНИГА PDF
Он перешел в Ганноверский университет. Он занимал кафедру механики в гражданском строительстве от Вольфганга Элерса, изучал гражданское строительство в Ганноверском университете и получил докторскую степень и степень доктора наук в Университете Дуйсбург-Эссен.
Область его исследований – компьютерная механика сплошных сред с особым акцентом на связанных проблемах и пористых средах. Его научные интересы – механика сплошной среды, микро- и конфигурационная механика, а также численные методы.