Глоссарий по теме “Механика” – Физика 10 класс. Раздел “Механика”
Архимедова сила (FA) – сила, действующая со стороны жидкости или газа на погруженное в них тело. Атмосферное давление (р) – давление, оказываемое на поверхность Земли ее воздушной оболочкой. Второй закон Ньютона – ускорение, которое возникает у тела в процессе взаимодействия, прямо пропорционально действующей на него силе и обратно пропорционально массе тела. Давление (р) – физическая скалярная величина, измеряемая отношением силы, действующей перпендикулярно площади поверхности, к площади этой поверхности. Закон Архимеда – на погруженное в жидкость или газ тело действует выталкивающая сила, численно равная весу жидкости (газа), вытесненной этим телом, и приложенная к центру тяжести вытесненного телом объема жидкости (газа). Закон
Бернулли – в каждой точке установившегося потока
жидкости сумма внешнего (р Закон всемирного тяготения – сила взаимного притяжения двух тел, которые могут быть приняты за материальные точки, прямо пропорциональна произведению их масс и обратно пропорциональна квадрату расстояния между ними. Закон Паскаля – жидкости и газы передают производимое на них давление одинаково по всем направлениям. Закон сохранения импульса тела – векторная сумма импульсов тел в замкнутой системе остается постоянной при любых взаимодействиях этих тел между собой. Закон сохранения механической энергии – в замкнутой системе, в которой не действуют силы трения и сопротивления, сумма кинетической и потенциальной энергии всех тел системы остается величиной постоянной. Замкнутая система – совокупность физических тел, у которых взаимодействия с внешними телами отсутствуют или скомпенсированы. Импульс тела (р) – физическая величина, равная произведению массы тела на его скорость. Инерциальная система отсчета – система, в которой тело находится в
покое или движется равномерно и прямолинейно, если на него не действуют другие
тела или действие этих тел скомпенсировано. Кинематика – раздел механики, изучающий способы описания движений и связей между величинами, которые характеризуют эти движения. Кинетическая энергия (Ек) – энергия движущегося тела, равная mv2/2 Масса (m, M) – физическая величина, определяющая инерционные и гравитационные свойства материи, измеряется в кг. Материальная точка – идеализированная модель физического тела, размерами которого можно пренебречь при решении поставленной задачи. Мгновенная скорость (v) – векторная величина, характеризующая быстроту перемещения и равная отношению перемещения ко времени, за которое это перемещение произошло, при условии дельта t -> 0. Механическое движение – изменение положения одного тела относительно другого со временем. Мощность (Р, N) –
величина, характеризующая скорость выполнения работы. Она равна отношению
совершенной работы ко времени, за которое она
выполнена. Невесомость – отсутствие давления на подставку тела, расположенного на ней, или на подвес. Неупругий удар – взаимодействие, при котором действует закон сохранения импульса, но не действует закон сохранения механической энергии. Основное уравнение динамики (ОУД) – векторная сумма сил, действующих на тело, равна произведению массы на его ускорение. Первый закон Ньютона – постулат существования инерциальных систем отсчета. Перемещение (s) – векторная величина, равная радиусу-вектору, проведенному от начальной точки траектории к конечной ее точке. Потенциальная энергия (Ер, W) – энергия взаимодействия системы тел, изменение которой равно совершенной работе. Путь (l) – длина траектории за время At. Работа
механическая (А) –
физическая величина, равная произведению силы, перемещения и косинуса угла между
направлением действия силы и перемещением. Радиус-вектор (r) – направленный отрезок, соединяющий начало координат и точку с произвольными координатами. Система отсчета – система, в которую входят тело отсчета, связанная с ним система координат и способ измерения времени движения с указанием на начало его отсчета. Сообщающиеся сосуды – сосуды, соединенные трубкой, которая заполнена жидкостью. Средняя скорость (vср) – величина, равная отношению перемещения ко времени, за которое это перемещение произошло. Тело отсчета – тело, относительно которого наблюдается движение. Траектория – линия, по которой движется материальная точка в заданной системе отсчета. Упругий удар – взаимодействие, при котором действуют закон сохранения импульса и закон сохранения механической энергии. Ускорение (a) –
векторная величина, характеризующая быстроту изменения скорости и равная
отношению изменения скорости ко времени, за которое оно
произошло. |


Механика.
§1. Механическое движение.
Простейший вид движения, встречающиеся в природе – это механическое движение.
Определение: Механикой называется раздел физики, занимающийся изучением законов механического движения.
В более узком смысле под механикой понимают ньютоновскую или классическую механику, то есть механику, в основе которой лежат законы Ньютона. Классическая механика состоит из трех разделов – статики, кинематики и механики.
Определение: Статикой называется раздел механики рассматривающий законы сложения сил и условия равновесия тел.
Определение: Кинематикой
называется раздел механики, дающий
математическое описание всевозможных
видов механического движения,
безотносительных к тем причинам, которые
обеспечивают осуществление каждого
конкретного вида движения.
Определение: Динамика называется раздел механики, исследующий влияние взаимодействия между телами на их механическое движение.
Для описания реально движущегося тела в механике используются, в зависимости от условий каждой конкретной задачи, различными упрощенными моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело и т.д.
Определение: Материальной точкой называют тело, форма и размеры которого не существенны в условиях данной задачи.
Определение: Механической системой называют совокупность тел, выделенных из окружающего мира для последующего механического исследования.
При определенных
условиях систему тел можно рассматривать
как систему материальных точек. Любое
про? материальное тело рассматривают
как систему материальных точек. Для
этого данное тело необходимо разбить
на такое количество частей, что размеры
каждой части будут много меньше размера
самого тела.
Определение: Абсолютно твердое тело – тело, деформациями которого в условиях данной задачи можно пренебречь.
Расстояние между двумя точками всегда неизменны. Под твердым телом понимают реальное тело, деформации которого не сказываются на его движении.
Определение: Абсолютно упругое тело – тело, деформация которого подчиняется закону Гука
После снятия внешних воздействий такое тело полностью восстанавливает свою форму и размеры.
Определение: Абсолютно неупругое тело – тело, которое после снятия внешних воздействий полностью сохраняет деформированное состояние, вызванное этим воздействием.
§2. Вектор перемещения точки.
Положение тела в пространстве можно определить только по отношению к другим телам.
Определение: Система
отсчета – система координат, жестко
связанная с абсолютно твердым телом,
снабженная часами и используемая для
определения положения в пространстве
тел или их частей в любые моменты времени.
Тело отсчета – абсолютно твердое тело, с которым жестко связана система координат. Обычно это инерциальная система отсчета. Наиболее часто используется прямоугольная декартова система координат, в основе которой лежит базис .
Определение: Радиус-вектор – вектор, направленный из начала координат в текущее положение материальной точки.
В координатном представлении, гдеx, y, я – координаты точки. В общем случае , x, y,z являются функциями времени.
x, y, z – проекции радиус-векторов на оси: OX, OY, OZ.
M – текущее положение точки.
M1 – проекция точки на плоскость XOY
Движение материальной точки полностью определено, если заданны три непрерывные функции:
Данная система
уравнений является системой кинематических
уравнений движения материальной точки. Кинетические уравнения движения точки
задают уравнение её траектории в
параметрической форме, где параметр
время.
Кинетические уравнения движения точки
задают уравнение её траектории в
параметрической форме, где параметр
время.
Определение: Траекторией называется линия, описываемая в пространстве движущейся точки.
Пример:
Определяем уравнение траектории ;Итого:
В зависимости от формы траектории различают прямолинейное, вращательное, криволинейное движение точки.
Определение: Плоским называют такое движение точки, если её траектория целиком лежит в одной плоскости.
Механическое движение тела относительно, то есть характер и, в частности, вид траекторий точки тела зависят от выбора системы отсчёта.
В общем случае траектория материальной точки представляет пространственную кривую.
Определение: Длинной пути
называется расстояние пройденного
материальной точкой за рассматриваемый
промежуток времени, измеряемое вдоль
траектории.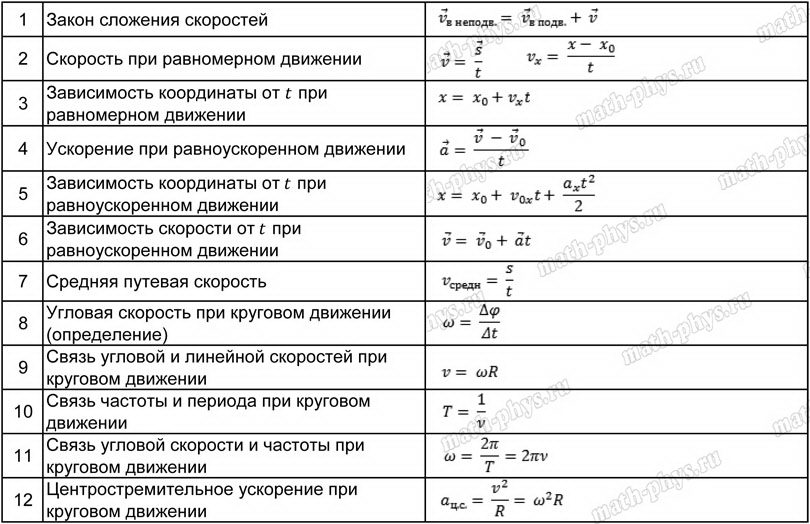
Длина пути – скалярная функция,.
Определение: Вектор перемещения материальной точки – это вектор, соединяющий начальное и конечное её положение в рассматриваемые моменты времени. Он равен приращению радиус-вектора за заданный промежуток времени.
– перемещение или приращение радиус-вектора
где – изменение координатыx материальной точки
где – изменение координатыy материальной точки
где – изменение координатыz материальной точки
x0, x – «иксовые» координаты начального и конечного положения точки, аналогично y0, y и z0, z.
Определение: Числом степеней свободы механической системы называется число независимых движений, которые она может совершать.
Пример:
Материальная точка
имеет три степени свободы; две материальные
точки, соединенные невесомым стержнем
– пять степеней свободы; три материальные
точки, соединенные невесомым стержнем
– шесть степеней свободы.
Основная терминология в механике | bartleby
Что такое механика?
Область науки и математики касалась движения объектов, связи между силовой материей и движения, если оно определено. Силы, действующие на объекты, приводят к смещениям или изменениям положения объекта относительно окружающей среды. Эта ветвь физики уходит своими корнями в Древнюю Грецию в виде писаний Аристотеля и Архимеда.
Механика подразделяется на три этапа, которые подробно обсуждаются ниже:
Статика
Статика — это состояние механики, которое имеет дело с силами, действующими на покоящееся тело и в нем.
Кинематика
Кинематика описывает возможные движения тела или системы без оценки силы движения.
Кинетика
Кинетика описывает действие сил, действующих на систему, совершающую движение.
Самая простая и самая доступная механическая система — это частица или самое маленькое тело, форма и внутренняя структура которого не имеют значения в реальной жизни.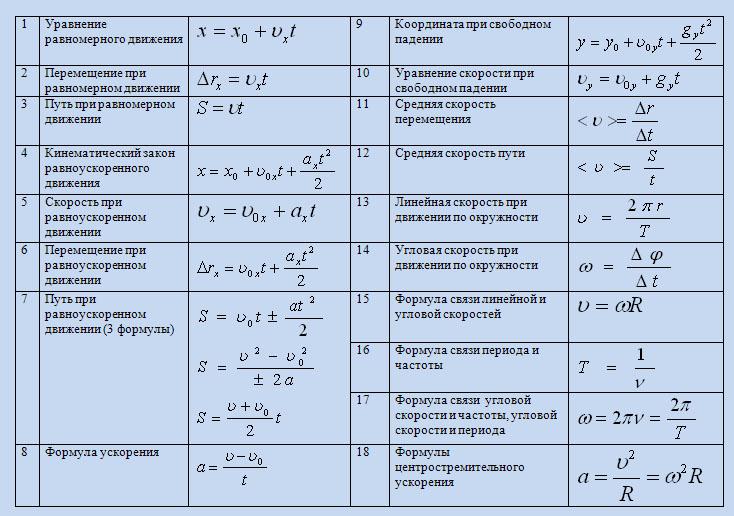 Напротив, движение системы, которая содержит несколько частиц, воздействующих друг на друга и, возможно, испытывающих силы, воздействующие на тела вне системы, представляет собой сложную механическую систему.
Напротив, движение системы, которая содержит несколько частиц, воздействующих друг на друга и, возможно, испытывающих силы, воздействующие на тела вне системы, представляет собой сложную механическую систему.
Классическая механика
В этой части механики изучается движение тел под действием сил или в состоянии равновесия испытывает все уравновешенные силы. Классическую механику можно считать приближением, возникающим из более глубоких законов, включенных в квантовую механику и теорию относительности. Центральными понятиями, обсуждаемыми в классической механике, являются силы, масса и движение.
Квантовая механика
Это раздел, который можно определить как исследование на очень малых масштабах по длине. Он непосредственно применяется к некоторым макроскопическим системам. Слово квант в квантовой механике появляется потому, что некоторые величины принимают только дискретные значения по сравнению с классической механикой. В квантовой механике частицы проявляют природу и свойства подобно волнам и имеют определенное волновое уравнение.
Статистическая механика — это отрасль, которая расширяет классическую термодинамику и касается градиента температуры, выполненной работы и многого другого. Она также известна как статистическая термодинамика или равновесная статистическая механика. Статистическая механика применяется для получения решений и требований, чтобы энтропия была максимальной в равновесии.
Некоторые важные определения
Масса
Масса – это количество материи, которой обладает физическое тело и которое оказывает сопротивление ускорению при приложении результирующей силы. Масса объекта также помогает определить силу гравитационного притяжения объекта к другим телам. Стандартной единицей измерения массы является килограмм.
Время
Время описывается как количество, которое указывает меру последовательных событий. Последующее событие выбирается на основе вращения Земли вокруг своей оси.
Пространство
Пространство называется ограниченной областью, в которой проводится анализ тела или системы.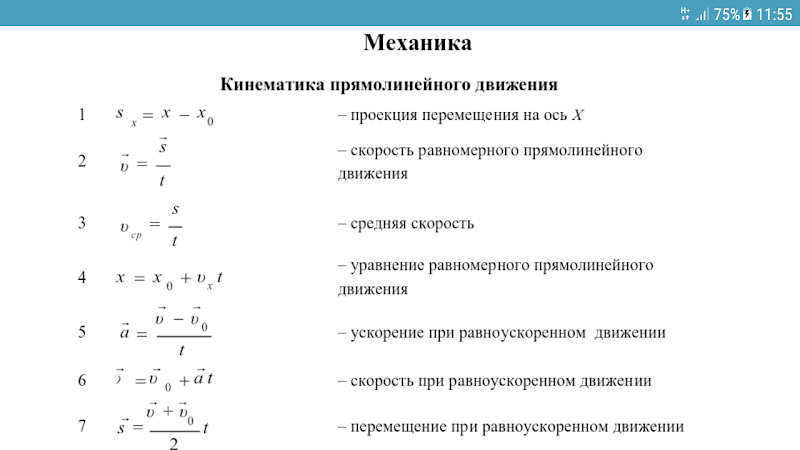
Длина
Длина определяется как расстояние, измеренное относительно наибольшего измерения объекта.
Расстояние
Расстояние называется числовым объяснением или величиной, определяющей, насколько далеко системы находятся друг от друга.
Перемещение
Перемещение называется минимальной длиной тела от начального до конечного местоположения.
Скорость
Скорость выражается термином, который дает дробное отношение изменения положения объекта относительно системы отсчета со временем.
Ускорение
Ускорение называется второй производной смещения по времени. Это векторная величина, и ускорение отрицательной величины называется замедлением.
Импульс
Импульс выражается как характеристика системы. Его величина определяется произведением его массы на скорость.
Сила
Сила описывается как воздействие, которое может изменить состояние объекта. Сила, приложенная к объекту, создаст ускорение над объектом.
Сила описывается как толкающая или притягивающая. Сила имеет как величину, так и направление, собирая ее как векторную величину.
Законы движения Ньютона
Законы движения Ньютона относятся к основным законам классической механики, разъясняющим связь между движением объекта и силами, действующими на него.
Первый закон движения Ньютона
Он гласит, что покоящееся тело останется в покое, а движущееся тело останется в движении, если на него не действует внешняя сила. Иными словами, изменить состояние системы можно только с помощью каких-то внешних средств.
Второй закон движения Ньютона
Он утверждает, что сила, действующая на объект, равна дробному изменению количества движения или равна произведению массы системы на полученное ею ускорение.
Третий закон движения Ньютона
Он гласит, что на каждое силовое воздействие всегда существует реакция равной величины и противоположного направления.
Напряжение
В механике напряжение определяется как дробное отношение между силой и единицей площади системы.
Типы напряжения
Напряжение, приложенное к материалу, может быть двух типов:
Растягивающее напряжение
Растягивающее напряжение описывается как индуцированная сила в компоненте из-за приложенной в осевом направлении силы, которая увеличивает длину компонента. Объекты под растягивающим напряжением становятся тоньше и длиннее.
Напряжение сжатия
Напряжение сжатия описывается как индуцированная сила в компоненте из-за приложенной в осевом направлении силы, которая уменьшает длину компонента. Объекты под сжимающим напряжением становятся толще и короче.
Штамм
Деформация описывается как отношение между деформацией, испытываемой системой в направлении приложенной силы, и начальными размерами системы.
Типы деформации
Деформация, испытываемая телом, может быть двух типов в зависимости от приложения нагрузки следующим образом:
Деформация при растяжении
Деформация при растяжении описывается как изменение длины (или площади) компонента из-за приложения напряжения растяжения.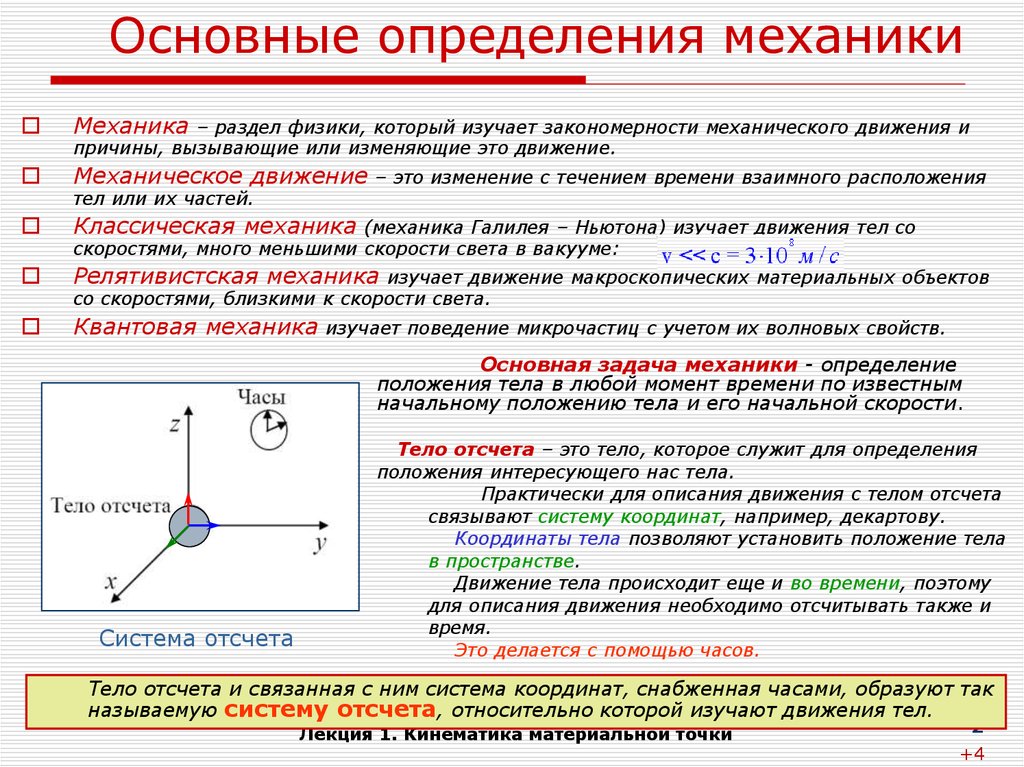
Деформация сжатия
Деформация сжатия описывается как изменение длины (или площади) компонента вследствие приложения сжимающего напряжения.
Закон Гука
Изучая пружины и объекты, обладающие упругостью, ученый по имени Роберт Гук обнаружил, что многие материалы проявляют сходные свойства при наблюдении зависимости напряжения от деформации.
В этом была линейная область, где сила, необходимая для растяжения материала, была пропорциональна растяжению материала, известная как закон Гука.
Частица
Частица описывается как тело с определенной массой, но ее размерами можно пренебречь.
Континуум
Тело, состоящее из нескольких материй, называется континуумом.
Твердое тело
Твердое тело описывается как твердое тело, в котором деформация равна нулю или настолько мала, что ею можно пренебречь.
Распространенные ошибки
Студенты часто путаются в термодинамике и статистической механике. Термодинамика занимается теплом и направлением теплового потока, тогда как статистическая механика дает микроскопическую перспективу тепла с точки зрения структуры материи и дает способ оценки тепловых свойств материи, например. теплоемкость.
Термодинамика занимается теплом и направлением теплового потока, тогда как статистическая механика дает микроскопическую перспективу тепла с точки зрения структуры материи и дает способ оценки тепловых свойств материи, например. теплоемкость.
Контекст и приложения
Эта тема важна для профессиональных экзаменов как для выпускников, так и для аспирантов, особенно для
- Бакалавр технологии в области машиностроения
- Бакалавр наук в области физики
- Магистр технологии в области механики 5
- Электромагнетизм
- Свойства материалов
- Предел текучести
- напряженного деформации
- Нагрузка-деформация
- Нагрузка-стресс
- штамм-деформация
- стресс
- штамм
- Смещение
- Расстояние
- Классическая механика
- Статистическая механика
- Кинетика
- Kinematic
- FIRCE
- Momentum
- Энергия
- Работа
- Механика
- Термодинамика
- Механика жидкости
- 5
- 5
- 5
- 5
Практические задачи
Q1 . Закон Гука дает связь между
Правильный вариант: (а). и продольная деформация, возникающая из-за приложенного нормального напряжения.
Q2. Величина деформации, испытываемой телом в направлении действия силы, деленная на начальные размеры тела, называется
Правильный вариант: (b)
Обзор: . свой первоначальный размер. Он бывает различных типов, таких как продольная деформация, поперечная деформация и т. д.
Q3 . «Оно имеет дело с движением тел под действием сил или с равновесием тел, когда все силы уравновешены», это определение относится к
Правильный вариант: (A). когда все силы, действующие на тело, будут уравновешены.
Q4. Количество движения движущегося тела, измеряемое как произведение его массы на скорость, называется
Правильный вариант: (b)
Обзор.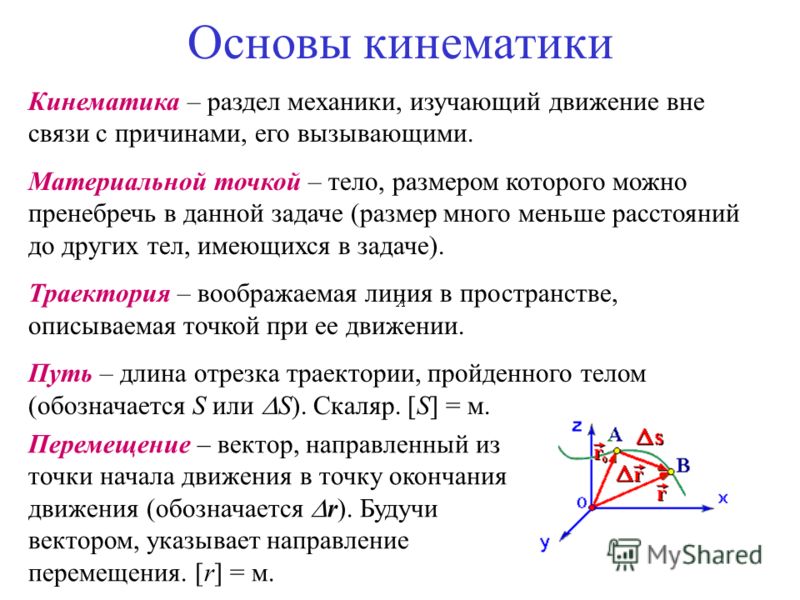 Он состоит из величины и направления, так что это относится к векторной величине.
Он состоит из величины и направления, так что это относится к векторной величине.
Q5 . Область математики и физики, изучающая движения физических объектов, называется
Правильный вариант: (A)
Explanation: 8. на нем, тогда как термодинамика имеет дело со свойствами, связанными с температурой. Мы обеспечим вас пошаговыми решениями миллионов задач из учебников, экспертами в любой области наготове 24 часа в сутки, 7 дней в неделю, когда вы запутались, и многое другое. Ознакомьтесь с примером решения вопросов и ответов по машиностроению здесь! *Время ответа зависит от темы и сложности вопроса. Среднее время отклика составляет 34 минуты для платных подписчиков и может быть больше для рекламных предложений. Современная механика восходит к работам Галилея, Симона Стевина и других в конце 16-го и начале 17-го века. Первой системой современной механики, которая успешно объяснила все механические явления, как земные, так и небесные, была система Исаака Ньютона, который в своих « Principia» («Математические принципы натуральной философии», 1687) вывел три закона движения и показал, как принцип всемирного тяготения можно использовать для объяснения как поведения падающих тел на землю, так и орбит планет в небе. Система механики Ньютона активно развивалась в течение следующих двух столетий многими учеными, в том числе Иоганном и Даниэлем Бернулли, Леонардом Эйлером, Ж. В 1905 году Альберт Эйнштейн показал, что ньютоновская механика является аппроксимацией, справедливой для случаев, включающих скорости, намного меньшие скорости света; для очень больших скоростей требовалась релятивистская механика его теории относительности. Далее Эйнштейн в своей общей теории относительности (1916 г.) показал, что гравитацию можно объяснить с точки зрения влияния массивного тела на структуру пространства и времени вокруг него, причем этот эффект относится не только к движению других тел, обладающих массой, но также засветиться. В квантовой механике, разработанной в 19 в.В 20-х годах как часть квантовой теории движения очень крошечных частиц, таких как электроны в атоме, объяснялись с помощью того факта, что и материя, и энергия имеют двойственную природу — иногда они ведут себя как частицы, а иногда — как волны. механика: | Информация
Современная механика
 Путем эксперимента и математического анализа Галилей провел ряд важных исследований, в частности, падающих тел и снарядов. Он сформулировал принцип инерции и использовал его для объяснения не только механики тел на Земле, но и механики небесных тел (которые, однако, он считал движущимися по однородным круговым орбитам). Философ Рене Декарт выступал за применение математико-механического подхода ко всем областям и основал механистическую философию, которая имела такое важное значение в науке в течение следующих двух или более столетий.
Путем эксперимента и математического анализа Галилей провел ряд важных исследований, в частности, падающих тел и снарядов. Он сформулировал принцип инерции и использовал его для объяснения не только механики тел на Земле, но и механики небесных тел (которые, однако, он считал движущимися по однородным круговым орбитам). Философ Рене Декарт выступал за применение математико-механического подхода ко всем областям и основал механистическую философию, которая имела такое важное значение в науке в течение следующих двух или более столетий. ле Рондом д’Аламбером, Ж. Л. Лагранжем, П. С. Лапласом, С. Д. Пуассоном и В. Р. Гамильтоном. Она нашла применение для объяснения поведения газов и термодинамики в статистической механике Дж. К. Максвелла, Людвига Больцмана и Дж. У. Гиббса.
ле Рондом д’Аламбером, Ж. Л. Лагранжем, П. С. Лапласом, С. Д. Пуассоном и В. Р. Гамильтоном. Она нашла применение для объяснения поведения газов и термодинамики в статистической механике Дж. К. Максвелла, Людвига Больцмана и Дж. У. Гиббса.