
MEMS-акселерометры и гироскопы — разбираемся в спецификации / Хабр
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (, которое фиксируется емкостным датчиком.
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений . Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС): , [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
Допустим, наш акселерометр сейчас работает в диапазоне измерений , то есть полный размах возможных значений будет .
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.
Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.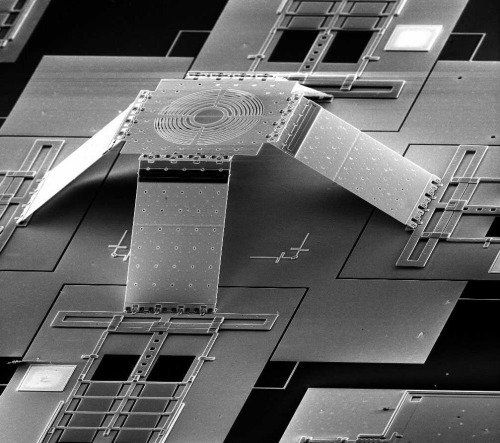
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т.д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы (собственной частоты колебаний сенсора ).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Уровни шума можно определять несколькими способами. Можно рассматривать их во временной или частотной области (после преобразования Фурье). В первом случае берут остаточный шум как среднеквадратичное значение сигналов от неподвижного датчика (по факту это стандартное отклонение для выборки при ) за некоторый промежуток времени:
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.
На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
 Одна из возможных характеристик шума в спецификациях зовётся power spectral density of noise (PSD), noise spectral density, noise power density, или попросту noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как Средняя мощность, рассеиваемая сигналом в течение промежутка времени
Одна из возможных характеристик шума в спецификациях зовётся power spectral density of noise (PSD), noise spectral density, noise power density, или попросту noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как Средняя мощность, рассеиваемая сигналом в течение промежутка времениМощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
что после представления косинуса и синуса в экспоненциальной форме
и замены можно записать в виде
где комплексные коэффициенты (спектральные компоненты) ряда Фурье для ,
В общем случае эти коэффициенты представимы следующим образом:
Амплитудным и фазовым спектром называют графики зависимости и от частоты. Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
и имеет размерность Средняя нормированная мощность действительного сигнала будет
Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если стремится к бесконечности, последовательность импульсов превращается в отдельный импульс , число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот Для данного предельного случая можно определить пару интегральных преобразований Фурье
и
где — Фурье-образ.
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью или То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8.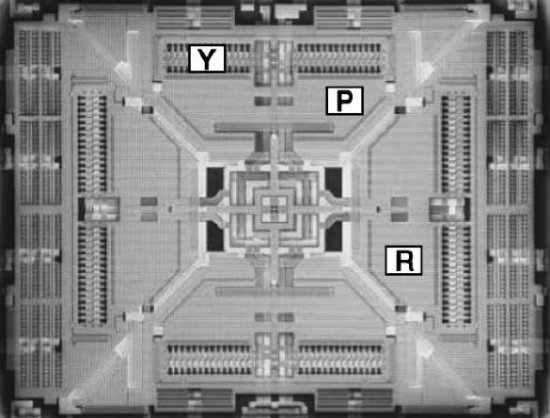 714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно. Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ. Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
Судя по исследованию в [MPU9250_DLPF], наш выбор 1. 57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
| MPU-9250 | BMI088 | ||||
|---|---|---|---|---|---|
| Гироскоп | |||||
| 523 | 0. 41 41 |
1.6 | |||
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| Акселерометр | |||||
218. 1 1 |
5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | |||
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
| MPU-9250 | BMI088 | ||
|---|---|---|---|
| Гироскоп, 16 бит | |||
| Диапазон (FS), (dps) | Разрешение, бит (BW=92Hz) | Диапазон (FS), (dps) | Разрешение, бит (BW=64Hz) |
| 8 | |||
| 9 | 9 | ||
| 10 | 10 | ||
| 11 | 11 | ||
| 12 | 12 | ||
| Акселерометр | |||
| Диапазон (FS), g | Разрешение, бит | Диапазон (FS), g | Разрешение (по X,Y), бит |
| 6 | 8 | ||
| 7 | 9 | ||
| 8 | 10 | ||
| 9 | 11 | ||
И это лишь самые основные параметры.
Откуда что бралось:
- Самый приятный документ от Freescale Semiconductor — «How Many Bits are Enough?»
- [EE] — «Resolution vs Accuracy vs Sensitivity Cutting Through the Confusion»
- [Время электроники] — «МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы»
- [LSB] — «An ADC and DAC Least Significant Bit (LSB)»
- [Measurement Computing] — «TechTip: Accuracy, Precision, Resolution, and Sensitivity»
- [KIT] — «Акселерометры Analog Devices — устройство и применение»
- [Easyelectronics] — «Сигма-дельта АЦП»
- [Радиолоцман] — «Магнитометры: принцип действия, компенсация ошибок»
- [SO] — «Noise Measurement»
- [Mide] — «Accelerometer Specifications: Deciphering an Accelerometer’s Datasheet»
- [CiberLeninka] — Delta-Sigma ADC Filter
- [SciEd] — «Особенности реализации цифровой фильтрации с изменением частоты дискретизации»
- [MPU6050] — «Using the MPU6050’s DLPF»
- [MPU9250_DLPF] — MPU9250 Gyro Noise DLPF work investigation
- Understanding Sensor Resolution Specifications
- Siemens Digital Signal Processing
- МЭМС-датчики движения от STMicroelectronics
- [TMWorld] — «Evaluating inertial measurement units»
- [Sklyar] – Скляр Б.
 Цифровая связь. Теоретические основы и практическое применение.
Цифровая связь. Теоретические основы и практическое применение.
 Цифровая связь. Теоретические основы и практическое применение.
Цифровая связь. Теоретические основы и практическое применение.микроэлектромеханические системы, часть 1 / Аналитика
Наномир на данный момент является своего рода фронтиром – передним краем науки, который пока еще только покоряют ученые-пионеры. А вот микромир уже достаточно давно освоен и в нем вовсю идет строительство. Пожалуй, самым впечатляющим типом микроструктур, которые создаются людьми, являются MEMS – микроэлектромеханические системы.
Обычно MEMS делят на два типа: сенсоры – измерительные устройства, которые переводят те или иные физические воздействия в электрический сигнал, и актуаторы (исполнительные устройства) – системы, которые занимаются обратной задачей, то есть переводом сигналов в те или иные действия. В этой части статьи поговорим о первой категории MEMS.
Пожалуй, самыми «трендовыми» из MEMS-сенсоров являются датчики движения. Они в последнее время постоянно на слуху: телефоны, коммуникаторы, игровые приставки, фотокамеры и ноутбуки все чаще и чаще снабжаются акселерометрами (датчиками ускорения) и гироскопами (датчиками поворота).
В мобильных телефонах и видеоприставках чувствительность к движениям пользователя используется в основном, что называется, «для прикола». А вот в портативных компьютерах акселерометры выполняют очень даже полезную функцию: улавливают момент, когда жесткий диск может подвергнуться повреждению из-за удара и паркуют его, диска, головки. В фототехнике использование датчиков движения не менее актуально – именно на их основе работают честные системы стабилизации изображения.
Классический гироскоп образца XIX века. Засунуть такой в iPhone или джойстик Wii довольно-таки затруднительно
Впрочем, рассуждать о том, что в реальности полезнее – активные игры на Wii, функция автоматического поворота картинки на iPhone, защита винчестера или возможность снимать фотографии без смазывания – дело неблагодарное. Покупателям нравится и то, и другое, и третье, и четвертое. Поэтому производители в последнее время стараются как можно более плотно использовать датчики движения.
Благо, возможностей у них для этого предостаточно: автопроизводители (из массовых индустрий они первыми опробовали данного рода устройства) уже несколько десятилетий активно эксплуатируют датчики движения, например, в подушках безопасности и антиблокировочных системах тормозов.
Так что соответствующие чипы давно разработаны, выпускаются целым рядом крупных и сравнительно мелких компаний и производятся в таких количествах, что цены давно и надежно сбиты до минимума. Типичный MEMS-акселерометр сегодня обходится в несколько долларов за штуку.
И места занимает – всего ничего. Для примера, размер корпуса пьезогироскопа Epson XV-8000 составляет 6×4,8×3,3 мм, а трехосного акселерометра LIS302DL производства ST Microelectronics – всего лишь 3x5x0,9 мм. Причем речь именно о размерах готового устройства с корпусом и контактами – сам кристалл еще меньше.
Датчик движения Epson XV-8000. И это далеко не самый компактный MEMS-сенсор
На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе. Подвижная часть системы – классический грузик на подвесах. При наличии ускорения грузик смещается относительно неподвижной части акселерометра. Обкладка конденсатора, прикрепленная к грузику, смещается относительно обкладки на неподвижной части. Емкость меняется, при неизменном заряде меняется напряжение – это изменение можно измерить и рассчитать смещение грузика. Откуда, зная его массу и параметры подвеса, легко найти и искомое ускорение.
Емкость меняется, при неизменном заряде меняется напряжение – это изменение можно измерить и рассчитать смещение грузика. Откуда, зная его массу и параметры подвеса, легко найти и искомое ускорение.
Основной принцип работы конденсаторных акселерометров
Это теория. На практике, MEMS-акселерометры устроены таким образом, что отделить друг от друга составные части – грузик, подвес, корпус и обкладки конденсатора – не так-то просто. Собственно, изящество MEMS в том и заключается, что в большинстве случаев в одной детали здесь удается (а вернее, попросту приходится) комбинировать сразу несколько предметов.
Относительно простой, но чрезвычайно миниатюрный и чувствительный MEMS-акселерометр разработки Sandia Labs
Зачастую, современные MEMS-гироскопы устроены идентично акселерометрам. Просто в них значения ускорений по осям пересчитываются в значения углов поворота – конструкция примерно та же, но на выходе другая величина.
Гироскоп L3G4200D производства ST Microelectronics используется в iPhone 4
Тот же STM L3G4200D, фотография с большим увеличением
Однако встречаются и гироскопы, устройство которых “заточено” именно под вращение. Такие MEMS – одни из красивейших.
Такие MEMS – одни из красивейших.
Еще один гироскоп ST Microelectronics – LYPR540AH
Крупный план STM LYPR540AH. Толщина деталей этой ажурной конструкции – около 3 микрон!
Еще один MEMS-гироскоп
Помимо конденсаторных датчиков, существуют MEMS-акселерометры, использующие иные принципы. Например, датчики, основанные на пьезоэффекте. Вместо смещения обкладок конденсатора, в акселерометрах такого типа происходит давление грузика на пьезокристалл. Основной принцип тот же, что и в пьезозажигалках – под воздействием деформации пьезоэлемент вырабатывает ток. Из значения напряжения, зная параметры системы, можно найти силу, с которой грузик давит на кристалл – и, соответственно, рассчитать искомое ускорение.
Основной принцип работы акселерометров на пьезоэлементах
Есть и более экзотический тип MEMS-акселерометров – термальные датчики ускорения. В них в качестве основного объекта используется горячий пузырек воздуха. При движении пузырек отклоняется от центра системы, это отслеживается датчиками температуры. Чем дальше сместился пузырек – тем больше величина ускорения.
Чем дальше сместился пузырек – тем больше величина ускорения.
Двухосный термальный акслерометр
Менее популярный в статьях и обсуждениях, но гораздо более массовый тип MEMS-устройств – микроскопические микрофоны. Опять-таки, наиболее распространенными системами этого типа являются те, которые основаны на конденсаторном принципе.
Устроены они – проще некуда. Принципиально важных элементов в таком микрофоне всего два: это гибкая обкладка – мембрана, и более толстая, неподвижная обкладка. Под воздействием давления воздуха мембрана смещается, изменяется емкость между обкладками – при постоянном заряде изменяется напряжение. Эти данные пересчитываются в амплитуды и частоты звуковой волны.
Чтобы минимизировать влияние давления воздуха на неподвижную обкладку, эта обкладка перфорируется. Кроме того, под ней делается сравнительно большая ниша с обязательным вентиляционным отверстием. Идея в том, что единственным подвижным элементом в системе в идеале должна быть мембрана – и только она.
микроэлектромеханический микрофон под микроскопом. Диаметр мембраны чуть больше половины миллиметра
Как и в случае с акселерометрами, здесь может быть использован пьезоэффект – в этом случае под мембраной ставится пьезокристалл. Дальше – как и в случае пьезоакселерометров: давление воздуха передается мембраной на пьезоэлемент, под этим воздействием кристалл вырабатывает ток. Напряжение измеряется и переводится в амплитуду и частоту звука.
Самый миниатюрный MEMS-микрофон компании Akustica (площадь кристалла – 1 кв.мм) теряется рядом со своими более крупными родственниками
То, что годится для звука, подходит и для измерения давления в иных областях. Похожие на микрофоны MEMS-системы могут использоваться в качестве датчиков давления. Несложно догадаться, что применение такие сенсоры находят в уйме областей.
Но можно выделить одну область, которая является наиболее интересной и наиболее специфичной для датчиков давления, основанных на MEMS-технологии. Это медицина. Здесь размер действительно имеет значение. Если в какой-нибудь трубопровод вполне можно встроить «обычный», макроскопический датчик, то с кровеносным сосудом такой фокус, очевидно, не получится. Тут нужны очень и очень компактные решения.
Здесь размер действительно имеет значение. Если в какой-нибудь трубопровод вполне можно встроить «обычный», макроскопический датчик, то с кровеносным сосудом такой фокус, очевидно, не получится. Тут нужны очень и очень компактные решения.
Ультракомпактный и высокоточный датчики давления на фоне одноцентовой монеты (по размеру она примерно эквивалентна нынешним русским 50 копейкам)
Разумеется, в медицине востребованы не только датчики давления. Существует множество микроскопических биодатчиков, измеряющих массу разнообразных величин – от температуры до уровня глюкозы. Есть и более неожиданные устройства, вроде микроскопических систем подачи лекарств. И, разумеется, есть куча интереснейших прототипов, многие из которых в принципе не имеют аналогов среди макроустройств.
Прототип щипцов для микрохирургии глаза. Размеры головки щипцов – порядка 1,5х1,5 миллиметра. Толщина губ – несколько десятков микрон. Человеческий волос этими щипцами подцепить не получится – он для них слишком толстый
Что ж, разговор о MEMS-сенсорах мы на этом завершим. Впереди у нас еще более интересная и захватывающая тема: MEMS-актуаторы. Печатающие головки струйных принтеров, микрозеркальные матрицы, элементы оптико-волоконных сетей и многое другое. Обещаем: скучно не будет!
Впереди у нас еще более интересная и захватывающая тема: MEMS-актуаторы. Печатающие головки струйных принтеров, микрозеркальные матрицы, элементы оптико-волоконных сетей и многое другое. Обещаем: скучно не будет!
Другие статьи серии:
- MEMS: микроэлектромеханические системы, часть 2
- MEMS: микроэлектромеханические системы, часть 3
Пассивный интегрированный оптический гироскоп на основе фотонно-кристаллического кольцевого резонатора для измерения угловой скорости
Mohammadi M, Birjandi MAM (2015) Основание пятипортового делителя мощности на столбчатом фотонном кристалле. Иран J Sci Technol 39 (E1): 93–100
Google ученый
Лю Т., Захарян А.Р., Фаллахи М. (2004) Многомодовый фотонно-кристаллический волноводный делитель мощности на основе интерференции. J Lightwave Technol 22 (12): 2842–2846
Артикул Google ученый
 “>
“>Foghani S, Kaatuzian H, Danaie M (2010) Моделирование и проектирование широкополосного T-образного фотонно-кристаллического сплиттера. Приложение XL(4):863–872
Google ученый
Джоаннопулос Д.Д., Джонсон С.Г., Винн Д.Н., Мид Р.Д. (2008) Фотонные кристаллы: формирование потока света, 2-е изд. Издательство Принстонского университета, Принстон
Google ученый
Wu Z, Xie K, Yang H (2012) Свойства запрещенной зоны двумерных фотонных кристаллов с ромбической решеткой. Оптик 123:534–536
Артикул Google ученый
Yang D, Wang B, Chen X, Wang C, Ji Y (2017) Сверхкомпактная мультиплексная сенсорная матрица на кристалле на основе плотной интеграции гибкого одномерного резонатора нанолучевого фотонного кристалла с большим свободным спектральным диапазоном и высокой добротностью фактор. IEEE Photon J 9(4), ст. № 4
IEEE Photon J 9(4), ст. № 4
2
Google ученый
Williams C, Banan B, Cowan G, Liboiron-Ladouceur O (2016) Синхронная с источником архитектура, использующая мультиплексирование с разделением мод для кремниевых фотонных межсоединений на кристалле. IEEE J Sel Top Quantum Electron 22(6), Art. № 8300109
Артикул Google ученый
Арафа С., Бушемат М., Бушемат Т., Бенмерхи А. (2017) Высокочувствительный мультиплексный биосенсорный массив на фотонном кристалле с использованием прослоенных полостей H0. Международная конференция по нанофотонике и микро/нанооптике (НАНОП), 139
Fallahi V, Seifouri M, Olyaee S, Alipour-Banaei H (2017) Четырехканальный оптический демультиплексор на основе гексагональных фотонно-кристаллических кольцевых резонаторов. Opt Rev 24(4):605–610
Статья Google ученый
 “>
“>Robinson S, Dhanlaksmi N (2017) Биосенсор на основе фотонных кристаллов для определения концентрации глюкозы в моче. Photonic Sens 7(1):11–19
Статья КАС Google ученый
Оляи С., Мохебзаде Бахабади А. (2015) Разработка нового фотонно-кристаллического нанокольцевого резонатора для применения в биосенсорах. Opt Quant Electron 47(7):1881–1888
Статья КАС Google ученый
Sheng Li J (2014) Быстродействующий переключатель терагерцового диапазона на основе Т-образного фотоникокристаллического волновода. Оптик 125:3221–3223
Артикул Google ученый
Seifouri M, Fallahi V, Olyaee S (2018) Оптический фильтр сверхвысокой добротности на основе кольцевого резонатора на фотонном кристалле. Photon Netw Commun 35(2):225–230
Статья Google ученый
 “>
“>Мохебзаде-Бахабади А., Оляи С. (2018) Полностью оптические логические вентили НЕ и исключающее ИЛИ с использованием фотонно-кристаллического нанорезонатора и на основе эффекта интерференции. ИЭТ Оптоэлектрон 12(4):191–195
Артикул Google ученый
Оляи С., Сейфури М., Мохебзаде-Бахабади А., Сардари М. (2018) Реализация полностью оптических логических элементов НЕ и исключающее ИЛИ на основе эффекта интерференции с высокой контрастностью и сверхкомпактным размером. Опция Quant Electron 50(11):1–12
CAS Google ученый
Шойер Дж., Ярив А. (2006) Эффект Саньяка в волноводных структурах замедленного света со связанными резонаторами. Phys Rev Lett 96:053901
Статья Google ученый
Шойер Дж. (2016) Пределы квантового и теплового шума связанных резонаторных оптических волноводов и датчиков оптического вращения с резонансными волноводами. J Opt Soc Am B 33(9)
J Opt Soc Am B 33(9)
Статья КАС Google ученый
Zhang H, Chen J, Jin J, Lin J, Zhao L, Bi Z, Huang A, Xiao Z (2016) Встроенная модуляция для измерения вращения гироскопа на основе кольцевого резонатора в сочетании с интерферометром Маха – Цендера. Научный представитель 6
Passaro VMN, Tullio CD, Troia B, Notte ML, Giannoccaro G, Leonardis FD (2012) Последние достижения в области интегрированных фотонных датчиков. Датчики 12
Mancinelli M, Guider R, Masi M, Bettotti P, Vanacharla MR, Fedeli J, Pavesi L (2011) Оптическая характеристика устройства SCISSOR. Opt Express 19:13664–13674
Статья Google ученый
Пассаро В.М.Н., Делл’Олио Ф., Чиминелли С., Арменизе М.Н. (2009 г.) Эффективное химическое зондирование с помощью волноводов SOI со связанными слотами. Датчики 9:1012–1032
Датчики 9:1012–1032
Артикул КАС Google ученый
Sun B, Chen F, Chen K, Hu Z, Cao Y (2012) Встроенный датчик оптического электрического поля от 10 кГц до 18 кГц. IEEE Photon Technol Lett 24:1106–1108
Статья КАС Google ученый
Scheuer J, Steinberg BZ (2009) Датчики медленного вращения. ШПАЙ
Ciminelli C, Dell’Olio F, Campanella CE, Armenise MN (2010) Фотонные технологии для измерения угловой скорости. Adv Opt Photon 2(3), 370–404
Статья Google ученый
Wang Z, Yang Y, Lu P, Li Y, Zhao D, Peng C, Zhang Z, Li Z (2014) Полностью деполяризованный интерферометрический волоконно-оптический гироскоп на основе оптической компенсации. IEEE Photon J 6(1), ст. № 7100208
Google ученый
 “>
“>Komljenovic T, Tran MA, Belt M, Gundavarapu S, Blumenthal DJ, Bowers JE (2016) Лазеры с частотной модуляцией для интерферометрических оптических гироскопов. Opt Lett 41(8)
Статья КАС Google ученый
Дербали Дж., АбдельМалек Ф., Обайя С.С.А. (2011) Дизайн компактного фотонно-кристаллического датчика. Опция Quant Electron 42(8):463–472
Артикул Google ученый
Nacer S, Aissat A (2013) Высокочувствительные фотонно-кристаллические волноводные датчики. Опция Quant Electron 45(5):423–431
Артикул КАС Google ученый
Санкар Датта Х., Пал С. (2013) Разработка высокочувствительной фотонно-кристаллической волноводной платформы для биозондирования на основе показателя преломления. Опция Quant Electron 45(9):907–917
Артикул Google ученый
 “>
“>Малыкин Г.Б. (2014) Эффект Саньяка в кольцевых лазерах и кольцевых резонаторах. Как показатель преломления оптической среды влияет на чувствительность к вращению? ВГД наука. УФН 57(7):714–720
Статья Google ученый
Chen W, Lou S, Wang L, Zou H, Lu W, Jian S (2011) Высокочувствительный датчик кручения на основе интерферометра Саньяка с использованием фотонно-кристаллического волокна с боковой утечкой. IEEE Photon Technol Lett 23: 1639–1641
Артикул Google ученый
Tam HY, Khijwania SK, Dong XY (2007) Температурно-интенсивный датчик давления с использованием интерферометра Саньяка на основе фотонно-кристаллического волокна с сохранением поляризации. В: Proceedings of Optical Fiber Communication and Optoelectronics Conference, Шанхай, Китай, 17-19 октября 2007 г., стр. 345–347
Fu HY, Tam HY, Shao LY, Dong X, Wai PK, Lu C, Khijwania SK ( 2008) Датчик давления, реализованный с помощью интерферометра Саньяка на основе фотонно-кристаллического волокна с сохранением поляризации. Заявка Опция 47: 2835–2839
Заявка Опция 47: 2835–2839
Артикул КАС Google ученый
Ciminelli C, Olio FD, Campanella CE, Armenise MN (2010) Фотонные технологии для измерения угловой скорости. Adv Opt Photon 2:370–404
Статья Google ученый
Terrel M, Digonnet MJF, Fan S (2009) Сравнение характеристик оптических гироскопов со связанными резонаторами для медленного света. Лазерная фотоника, ред. 3(5):452–465
Артикул Google ученый
Греческая еда, Гирос, Спанакопита – TAKA TAKA MAM
О нас
Изысканная еда на ходу
Доступно для мероприятий
В нашем месте рядом с вами
9000 Можно перекусить не только столовой . Вы можете попробовать традиционные греческие блюда Souvlaki/Gyros, приготовленные великими поварами из традиционных свежих продуктов.
Вы можете попробовать традиционные греческие блюда Souvlaki/Gyros, приготовленные великими поварами из традиционных свежих продуктов.Рядом с вами
Доступен для проведения мероприятий
В ближайшем к вам месте
Мы доставляем вкусную еду по всему городу. Теперь вы можете найти нас по телефону:
Rivington Brew Co. Rivington PR6
State of Kind Brewery, Wigan W2 2er
Доступны для мероприятий
Доступны для событий
Доступны для событий
. свадьба, корпоративное мероприятие или другой особый случай, на котором вы хотели бы, чтобы мы появились? Для этого мы открыли наш дневник.
свадьба, корпоративное мероприятие или другой особый случай, на котором вы хотели бы, чтобы мы появились? Для этого мы открыли наш дневник.
Наша еда
Наше меню
Скачать PDFГде нас найти
Теперь у нас есть отдельная кухня в Бери, из которой вы можете заказать доставку или самовывоз. Для доставки, пожалуйста, используйте Just Eat, Uber Eats или для первоначальной цены, указанной в онлайн-меню, свяжитесь с нами по номеру WhatsApp ниже
. Вы находитесь рядом с нами и хотите сделать предварительный заказ?
Свяжитесь с нами по WhatsApp 07599 135925
и заблаговременно разместите заказ для получения (линия закрывается за 1 час до закрытия)
16/09/2022
Taka Taka Mam @ Rivington Brew Co
12PM
–
8PM
6 Rivingtonttonttontton. PR6 9HE
PR6 9HE
Детали события
09.16.2022
Taka Taka Mam @ Rivington Brew Co
Taka Taka Mam заняли внешнюю кухню в The Tap Room, Rivington Brew Co до конца сентября Пятница, Суббота и воскресенье
12:00
–
20:00
Пивоварня Rivington, Horrobin Lane, Chorley. PR6 9HE
25.11.2022
Така Така Мам @ State of Kind Brewery.
