Численное решение систем линейных уравнений. Метод Гаусса.
Способы решения систем линейных уравнений делятся на две группы:
1. Точные методы, представляющие собой алгоритмы для вычисления
корней системы (решение систем с помощью обратной матрицы, правило
Крамера, метод Гаусса и др.),
2. Итерационные методы, позволяющие получить решение системы с
заданной точностью путем сходящихся итерационных процессов (метод
итерации, метод Зейделя и др.).Вследствие неизбежных округлений результаты даже точных методов
являются приближенными. При использовании итерационных методов
дополнительно добавляется погрешность метода.
Метод Гаусса
Рассмотрим систему n линейных алгебраических уравнений относительно
n неизвестных х1, х2, …, хn:
В соответствии с правилом умножения матриц рассмотренная система
линейных уравнений может быть записана в матричном виде AX=B,
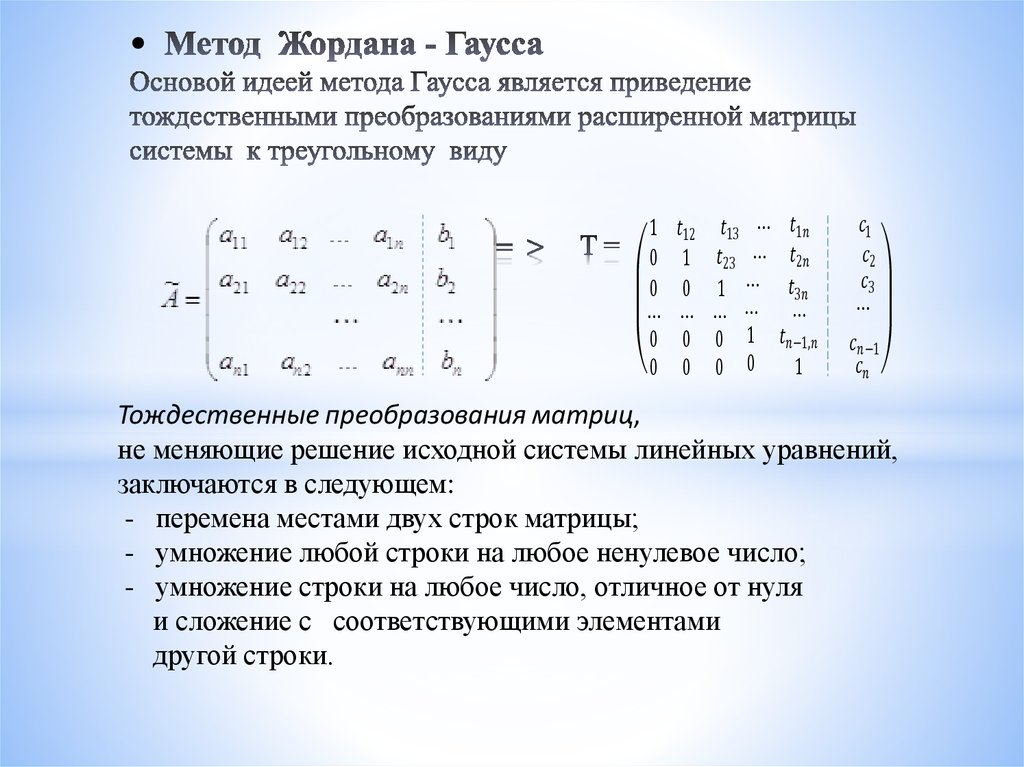
Идея метода Гаусса состоит в том, что
систему (8. 1) представляют в виде
1) представляют в виде
матрицы
которую последовательным исключением неизвестных приводят к
эквивалентной системе с треугольной матрицей вида
Эта процедура называется прямой ход. Все коэффициенты (включая d) на
каждом шаге прямого хода пересчитываются по формулам
Если в матрице встретилась строка с номером m, в которой все элементы
сmj равны нулю, а dm≠0, то выполнение алгоритма останавливаем и делаем
вывод о том, что система несовместна. Действительно, восстанавливая систему
уравнений по матрице, получим, что m-ое уравнение будет иметь вид
0 x1 + 0 x2 + 0 x3 + …. + 0 xn= dm
Этому уравнению не удовлетворяет ни один набор чисел.
Если в матрице имеются строки, содержащие одни нули, то мы имеем
альтернативные решения данной системы.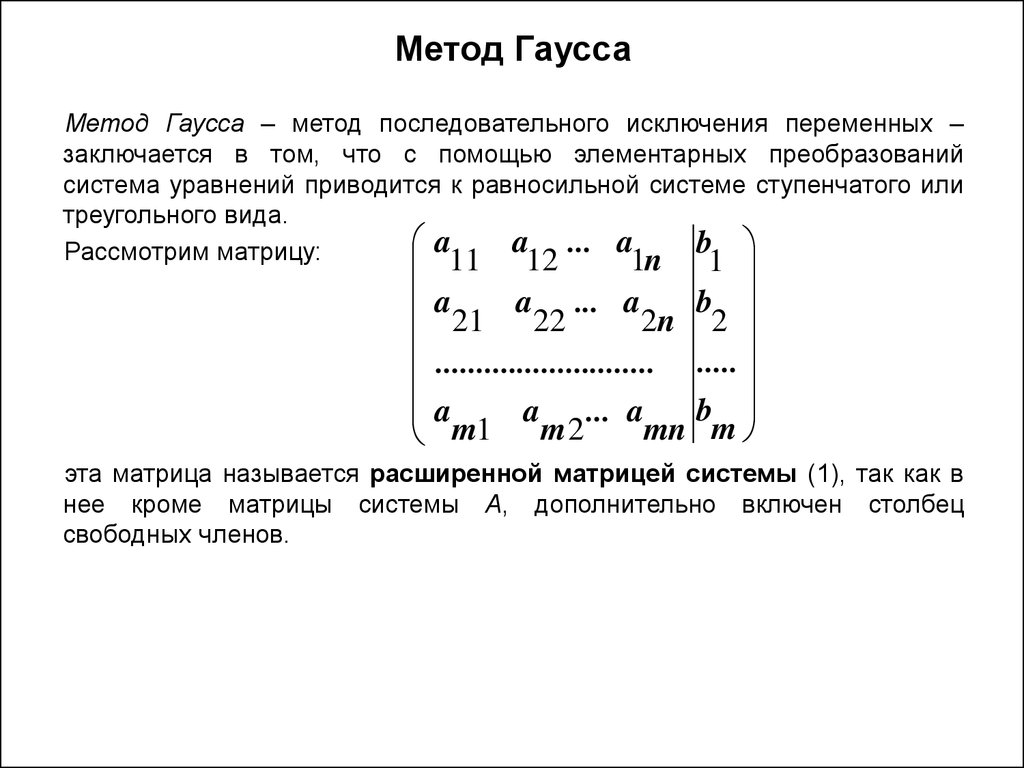
При обратном ходе последовательно вычисляются неизвестные, начиная
с xn.
Если перед началом прямого хода в исходной матрице в первой строке на
первых местах стояли нули, то необходимо найти строку, в которой в самом
левом столбце содержится элемент, отличный от нуля и поменять ее с первой
строкой местами.
Численное решение нелинейных уравнений. Процедура отделения корней. Метод бисекции поиска корня нелинейного уравнения.
Численное решение нелинейных уравнений.
Решение нелинейного уравнения f(x)=0 или системы нелинейных
уравнений состоит из двух этапов:
1) Отделение корней, то есть отыскание достаточно малых областей, в
каждой из которых заключен ровно один корень уравнения или системы
уравнений.
2) Вычисление каждого отделенного корня с заданной точностью.
Укажем следующие способы отделения корня:
1) Составляется таблица значений функции y=f(x) на промежутке
изменения аргумента x, и если окажется, что для соседних значений аргументов
значения функции имеют разные знаки, то корень уравнения
f(x)=0 находится между ними (правда это не говорит о том, что корень
единственный).
2) Строится график функции f(x) на промежутке изменения аргумента x;
тогда искомые корни находятся в некоторых окрестностях точек пересечения
графика с осью OX.
Кроме того, часто нужно знать начальное приближение x0 к корню x*
(который, заметим, неизвестен). В качестве этого начального приближения
берут, как правило, любую точку отрезка, на котором отделён корень,
например, его середину x0 = (a+b)/2, если описание метода не предписывает
поступить как-нибудь
иначе.
Отделение корня функции при гарантии ее определения на
неограниченном интервале, может осуществляться по следующему
итерационному алгоритму.
1. Для начального приближения x0, найти f0=f(x0), задать начальный
интервал поиска D и его коэффициент расширения d>1.
2. Вычислить a=x0 -D, b=x0+D.
некоторый заданный предел закончить поиск (интервал не найден).
57
4a. Если знаки fa и f0 отличаются, то считать корень окруженным на [a,x0] и
выйти из алгоритма.
4b. Если знаки fb и f0 отличаются, то считать корень окруженным на [x0,b] и
выйти из алгоритма.
4c. Если f0>0 (случай меньше нуля анализируется аналогично) перейти к 5:
5. Проверяется,
какое значение из fa или fb является
меньшим. Если оба
Проверяется,
какое значение из fa или fb является
меньшим. Если оба
одинаковы, то переходим к 6a (двусторонний поиск), если fb – производим
поиск вправо 6b, иначе – поиск влево 6c.
6a. Находим a=a-D, b=b+D, fa=f(a), fb=f(b), идем к пункту 3.
6b. Присваиваем последовательно a=x0, x0=b, fa=f0, f0=fb; находим b=b+D,
fb=f(b), переходим к пункту 3.
6c. Аналогично 6b, только направление поиска – влево.
Так как интервал поиска постоянно расширяется, то в конце концов
используя указанный алгоритм корень будет локализован.
Пусть [a,b] –
отрезок локализации. Предположим, что функция f(x) непрерывна на [a,b] и на
концах принимает
значения разных знаков f(a)· f(b)<0.
Алгоритм метода бисекции состоит в построении последовательности
вложенных отрезков, на концах которых функция принимает значения разных
знаков. Каждый последующий отрезок получают делением пополам
Опишем один шаг итераций метода. Пусть на k-ом шаге найден отрезок
[ak,bk] такой, что f(ak)· f(bk)<0. Найдем середину отрезка xk= (ak + bk)/2. Если
f(xk)=0, то xk – корень и задача решена. Если нет, то из двух половин отрезка
выбираем ту, на концах которой функция имеет противоположные знаки:
ak+1= ak, bk+1= xk, если f(ak)· f(xk)<0
ak+1= xk, bk+1= bk , если f(ak)· f(xk)>0
Критерий окончания итерационного процесса: если длина отрезка
локализации меньше ε, то итерации прекращают и в качестве значения корня с

Пособие по расчету строительных конструкций численными методами
План:
1. Задачи линейной алгебры.
2. Матричная форма решения систем уравнений.
3. Метод простых итераций.
4. Метод Гаусса-Зейделя.
1) В общем случае система линейных уравнений, содержащая m уравнений и n переменных имеет вид:
Здесь m — количество уравнений, n — количество переменных, x1 ,x2… ,x n _ — неизвестные, которые надо определить коэффициенты a11,a12,… ,a mn и свободные члены b1, b2,… ,b
Решение систем линейных алгебраических уравнений — одна из классических задач линейной алгебры, во многом определившая её объекты и методы. Кроме того, линейные алгебраические уравнения и методы их решения играют важную роль во многих прикладных направлениях, в том числе в линейном программировании,
Кроме того, линейные алгебраические уравнения и методы их решения играют важную роль во многих прикладных направлениях, в том числе в линейном программировании,
Решением системы уравнений называется такой n-мерный вектор Х = (x
Системы уравнений бывают:
Равносильными называются две системы уравнений, если они имеют одно и тоже множество решений.
Совместной называется система уравнений, если она имеет хотя бы одно решение.
Несовместной называется система уравнений, если она не имеет ни одного решения.
Определенной называется система уравнений, если она имеет единственное решение.
Неопределенной называется система уравнений, если она имеет бесконечное множество решений.
2) Матричная форма решения систем уравнений. Система уравнений может быть записана в векторном виде:
A1x1 + A2x2 + .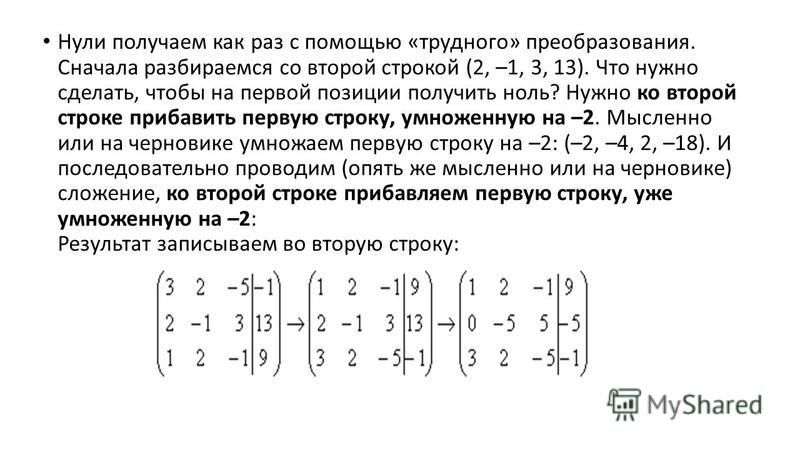 .. + Anxn =B
.. + Anxn =B
Пример 1. Записать в векторном виде.
В матричной записи система линейных уравнений может быть записана следующим образом:
A · X = B,
Здесь A — это матрица системы, Х — столбец неизвестных, В — столбец свободных членов. Если к матрице A приписать справа столбец свободных членов, то получившаяся матрица называется расширенной. Матричный метод применяется только для квадратных матриц (m = n ).
Запишем заданную систему в матричном виде:
AX = B.
Если матрица невырождена, то тогда с помощью операций над матрицами выразим неизвестную матрицу. Операция деления на множестве матриц заменена умножением на обратную матрицу, поэтому домножим последнее равенство на матрицу слева:
Поэтому, чтобы найти неизвестную матрицу надо найти обратную матрицу к матрице системы и умножить ее справа на вектор-столбец свободных коэффициентов.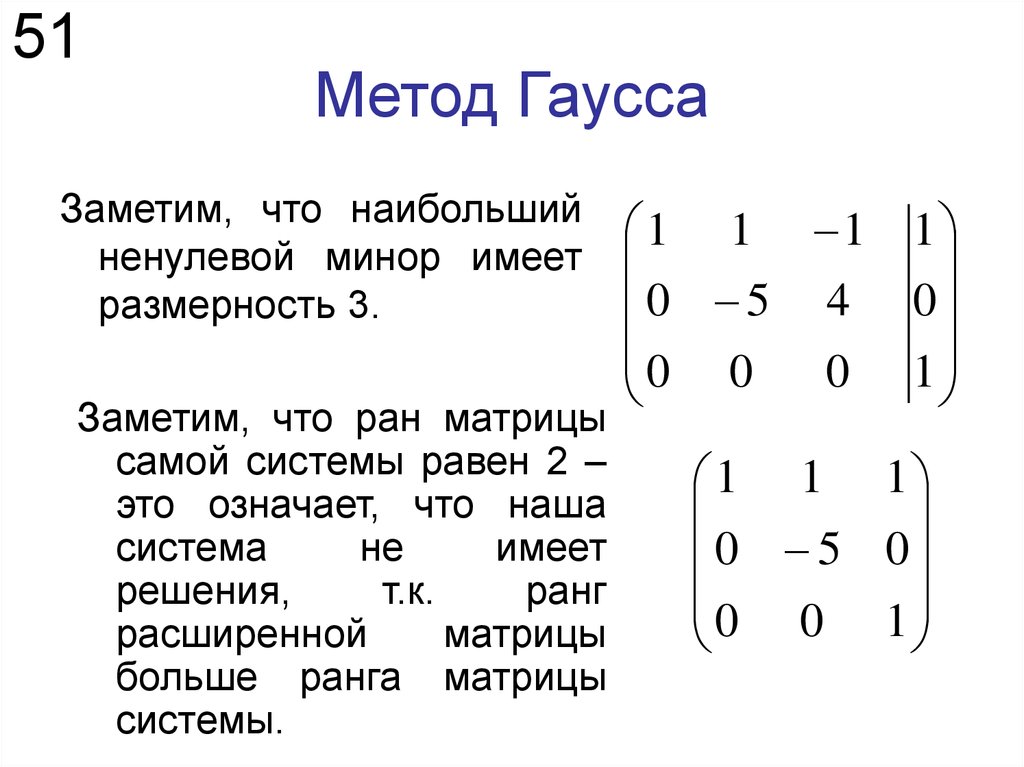
2) Метод простых итераций.
Альтернативой прямым методам решения СЛАУ являются итерационные методы, основанные на многократном уточнении x(0), заданного приближенного решения системы A·x=b. Верхним индексом в скобках здесь и далее по тексту обозначается номер итерации (совокупности повторяющихся действий).
Реализация простейшего итерационного метода — метода простых итераций — состоит в выполнении следующих процедур.
1. Исходная задача A·x=b преобразуется к равносильному виду:
где α – квадратная матрица порядка n; β – столбец. Это преобразование может быть выполнено различными путями, но для обеспечения сходимости итераций нужно добиться выполнения условия ||α|| < 1.
2. Столбец β принимается в качестве начального приближения x(0) =β и далее многократно выполняются действия по уточнению решения, согласно рекуррентному соотношению
Итерации прерываются при выполнении условия (где ε > 0 – заданная точность, которую необходимо достигнуть при решении задачи)
Алгоритм метода простых итераций
1. Преобразовать системуAx=bк виду x=ax+β одним из описанных способов.
Преобразовать системуAx=bк виду x=ax+β одним из описанных способов.
2. Задать начальное приближение решенияx(0)произвольно или положить x(0) = β, а также малое положительное число ε(точность). Положить k = 0.
3. Вычислить следующее приближениеx(k+1)по формуле x(k+1)=ax(k)+β.
4. Если выполнено условие ||x(k+1)-x(k)||<ε, процесс завершить и в качестве приближенного решения задачи принятьx*≈ x(k+1). Иначе положить k=k+1и перейти к пункту 3 алгоритма.
4) Метод Гаусса-Зейделя
Данный метод является одним из самых распространенных итерационных методов решения СЛАУ, поскольку он отличается простотой и легкостью программирования. Рассмотрим его суть. Допустим, диагональные коэффициенты исходной матрицы {aij}отличны от нуля (в противном случае можно переставить местами уравнения исходной системы). Представим исходную систему
Представим исходную систему
в следующем виде:
(2.5)
Если теперь задать для неизвестных их начальные приближенные значения , то система (2.5) позволяет вычислить более точные значения неизвестных на первом шаге (на первой итерации):
(2.6)
Используя найденные значения неизвестных, можно еще более уточнить их на второй итерации:
(2.7)
и так далее.
В данном методе для нахождения значения i-го неизвестного на каждой итерации используются значения предыдущих неизвестных, уже найденные на данной итерации. Общую формулу определения i-го неизвестного на k-й итерации для системы n уравнений можно записать так:
i = 1, 2, … , n; k = 1, 2, … (2.8)
Итерационный процесс продолжается до тех пор, пока все значения xi(k), не станут достаточно близкими к xi(k-1). Близость этих значений можно охарактеризовать максимальной абсолютной величиной их разности . Тогда при заданной точности вычислений > 0 критерий окончания итерационного процесса можно записать в виде:
Близость этих значений можно охарактеризовать максимальной абсолютной величиной их разности . Тогда при заданной точности вычислений > 0 критерий окончания итерационного процесса можно записать в виде:
(2.9)
При выполнении этого условия итерационный процесс называется сходящимся. В этом случае максимальные разности между значениями соответствующих неизвестных в двух последовательных итерациях убывают, а сами значения стремятся к решению системы.
Доказано, что для сходимости итерационного процесса достаточно, чтобы модули диагональных коэффициентов для каждого уравнения были не меньше суммы модулей всех остальных коэффициентов:
(2.10)
При этом хотя бы для одного уравнения неравенство (2.10) должно выполняться строго.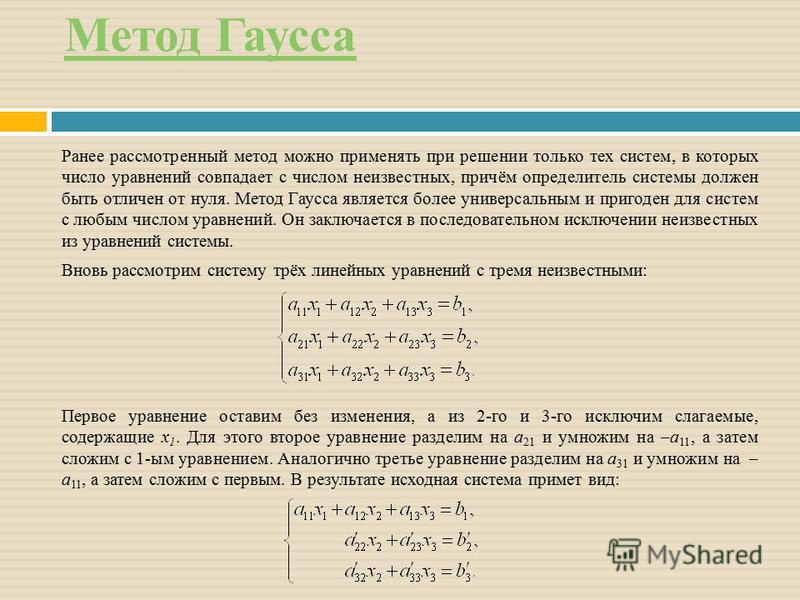
Литература [2], [3], [4], [13].
Линейная алгебра 5: Решение Ax = b в необратимых, неквадратных матрицах | by adam dhalla
Это продолжение моей серии по линейной алгебре, которую следует рассматривать как дополнительный ресурс при изучении класса 18.06 Гилберта Стрэнга на OCW. Это можно близко сопоставить с Лекция 8 в его серии.
Здесь мы продолжаем обсуждение решения линейных систем с исключением. В моей серии «Исключение по Гауссу» мы исследовали, как можно решать квадратные обратимые матрицы методом исключения и замены строк, но никогда не углублялись в решение прямоугольных необратимых систем.
На прошлом уроке мы рассмотрели, как можно решать неквадратные системы с помощью исключения Гаусса. В частности, мы решили системы в формате Ax = 0 и обнаружили нуль-пространственные векторы x , которые дают x = 0. мою серию «Линейная алгебра», которую следует рассматривать как дополнительный ресурс при изучении…
adamdhalla.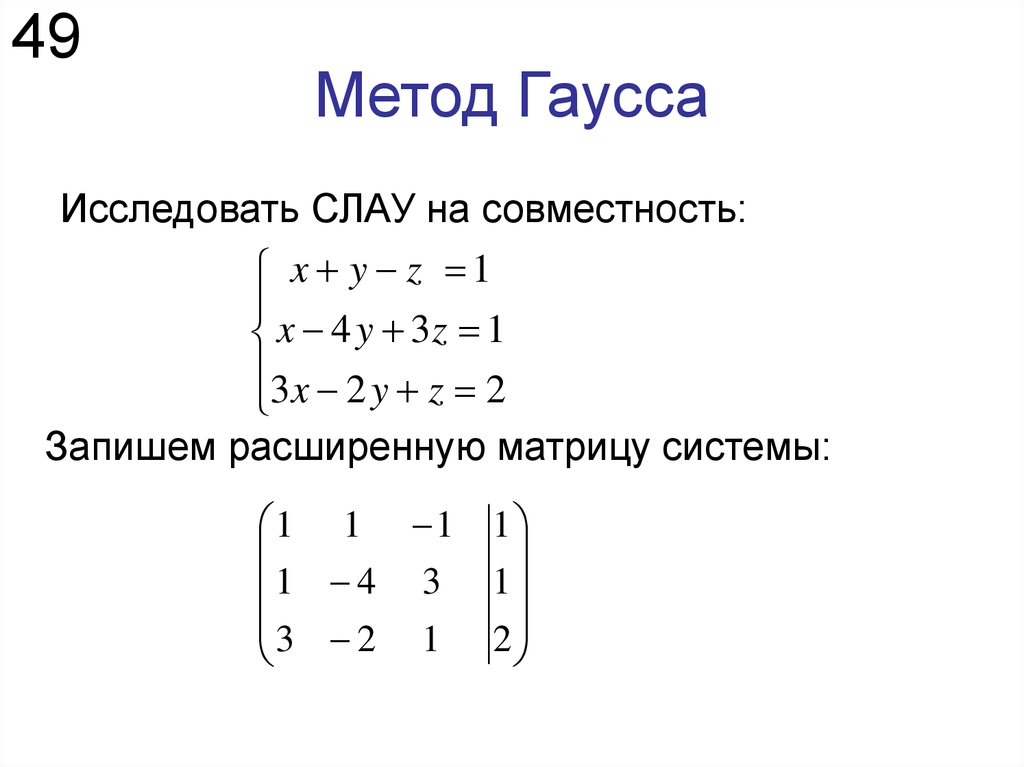 medium.com
medium.com
Самая большая разница между Ax = b и Ax = 0 заключается в том, что теперь наша правая часть отлична от нуля, и мы должны выполнить операции над обеими сторонами. Это подводит нас к нашей первой теме — -условию разрешимости.
Условия разрешимости
Все эти примеры будут иметь дело с прямоугольными необратимыми матрицами. Если у вас есть квадратная и обратимая матрица (что часто бывает), используйте более простое исключение Гаусса .
Условия разрешимости — это то, как мы узнаем, является ли некое b в Ax = b решением, которое на самом деле возможно. Это станет совершенно ясно на примере. Помните, что теперь, проходя через исключение с матрицами, которые, как мы ожидаем, будут зависимыми, мы не остановимся на опорных точках в нулевом месте. Мы просто продолжим переход к следующему столбцу.
Наша цель — узнать, как должен выглядеть ответ b, чтобы задача была решаемой.
Итак, первый пример.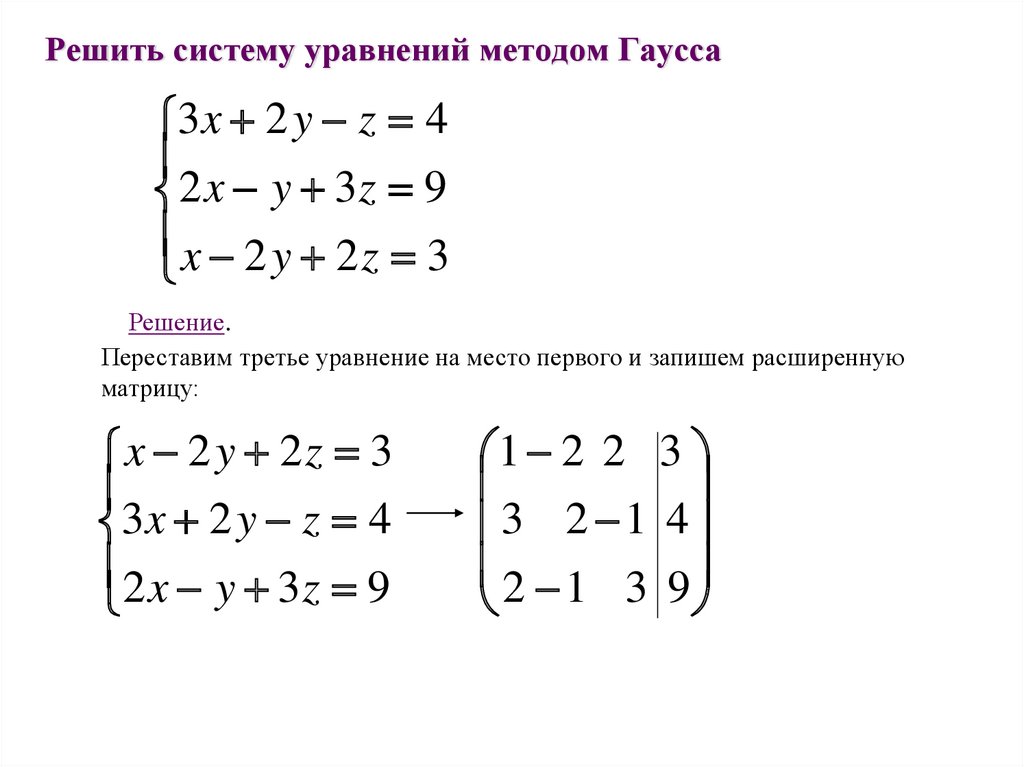
Строки 1 и 3 кратны друг другу и после исключения будут заменены строкой нулей. После использования первой строки для исключения первой и второй строк мы получаем:
Но теперь, когда у нас есть ненулевые числа в правой части, мы должны выполнить те же шаги исключения в правой части.
Что мы сделали? Чтобы исключить вторую строку, мы умножили первую строку на минус и вычли из нижней строки (или, можно подумать, мы добавили первую строку). Затем мы умножаем первую строку на 2 и вычитаем из последней строки. Итак, теперь с нашими переменными b, как это выглядит?
Из-за равенства мы должны выполнять те же операции над строками b. Таким образом, после этого мы можем получить представление о том, как выглядит нашего b.
Условия разрешимости появляются, когда левая часть равна 0. Если бы мы записали это в виде системы уравнений, мы получили бы:
Первые два уравнения не дают нам много информации или ограничений на b, , так как они зависят от того, какие значения мы в итоге присвоим нашим переменным х, у, z и т.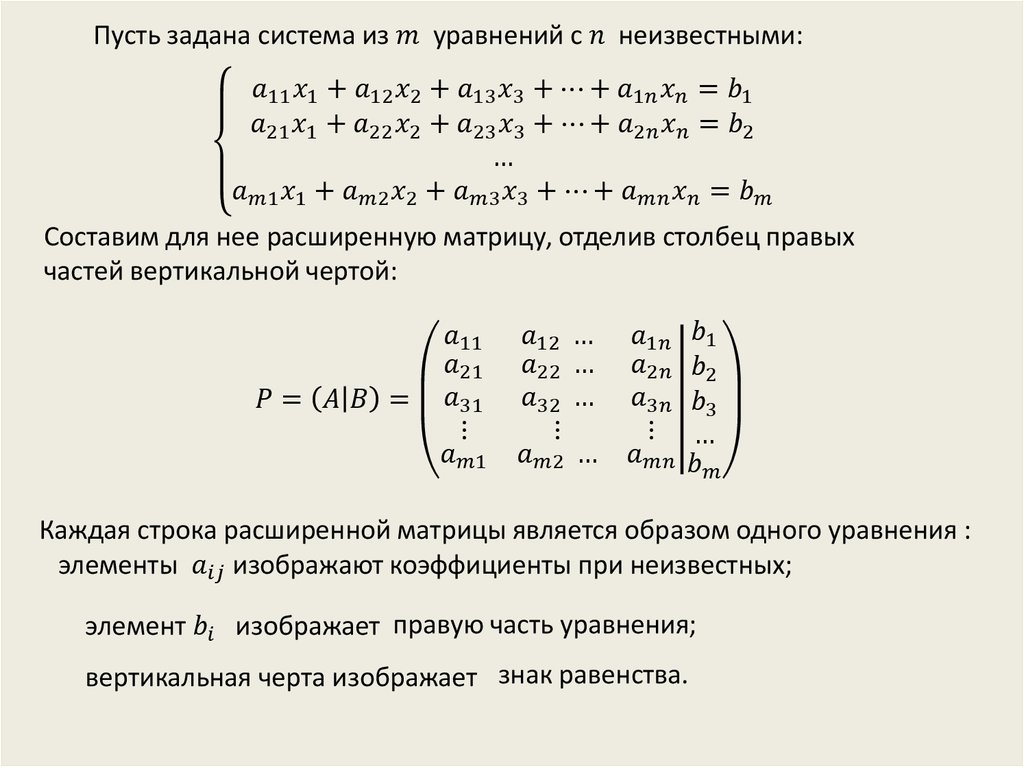
Последнее уравнение, с другой стороны, дает нам определенное ограничение на b. Чтобы Ax = b было истинным, b3 – 2b1 должно быть = 0. Переставляя это, мы получаем ограничение на b , что:
Теперь мы ограничены в различных b3, которые мы можем поместить в нашу матрицу. Вот несколько примеров векторов b , удовлетворяющих этому ограничению:
Во всех этих векторах b3 в 2 раза больше b1.Это может дать нам быстрое представление о том, возможно ли Ax = b или нет, или, при составлении уравнения, может дать нам представление о возможных ответах, которые мы можем получить.
Это дает нам два разных способа понимания этого конкретного Ax = b.
- Используя наши знания о пространстве столбцов, мы знаем, что b должно быть частью пространства столбца A. Другими словами, b ∈ C(A)
- Наше новое понимание — b должно удовлетворить все ограничения на него.
Теперь, когда мы это знаем, давайте решим задачу.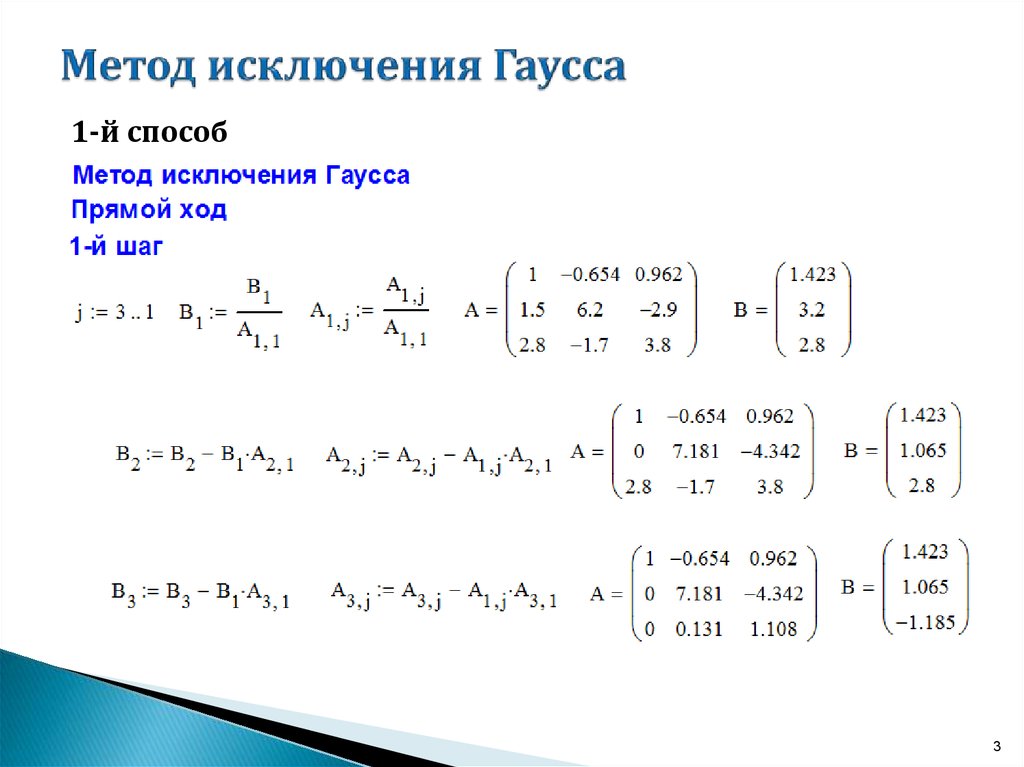
Нахождение полного решения задачи Ax = b
Я беру этот пример непосредственно со страницы 91 учебника Гилберта Стрэнга «Линейная алгебра и ее приложения», 4-е издание.
Возьмем эту систему:
Чтобы решить это, нам сначала нужно найти ответ b , который удовлетворяет любым ограничениям, которые у нас могут быть. Чтобы найти эти ограничения (и одновременно перевести A в U), используйте исключение Гаусса, чтобы исключить левую и правую части.
Мы умножили первую строку на 2 и вычли из второй строки. Затем мы умножили первую строку на -1 и вычли из третьей строки (прибавили). Мы отразили эти же изменения на правой стороне.
Теперь мы должны исключить последнюю строку из нашей второй строки.
Это b5 должно быть b3, но мне лень его менять Здесь мы вычтем два раза вторую строку из третьей строки. Нам нужно не забыть сделать это с правой стороны. Здесь все становится немного запутанным, так как мы опираемся на прошлые шаги исключения, но мы все еще можем это сделать.
Опять же, наше условие разрешимости находится в третьей строке. Если мы упростим это, мы получим наше условие разрешимости.
Теперь, когда у нас есть условие разрешимости, мы можем выбрать ответ b , который с ним работает. Почему бы нам не выбрать (1, 5, 5)? Вы можете проверить сами, что это работает.
Просто напомню, что как только мы найдем наш b , чтобы заменить его в исходном уравнении Ax = b, где A находится слева, а не U.
Теперь мы проходим тот же процесс исключения, просто на этот раз с конкретными цифрами, и, как и предсказывалось, он удовлетворяет ограничениям, которые мы на него накладываем.
Заметка о комплексном решении
Теперь, глядя на это, есть множество решений. Но важно отметить, что наш окончательный ответ будет также должны включать все ответы с нулевым пробелом.
Поясню. Поскольку эта матрица A не является независимой, в нулевом пространстве обязательно будет хотя бы один вектор x.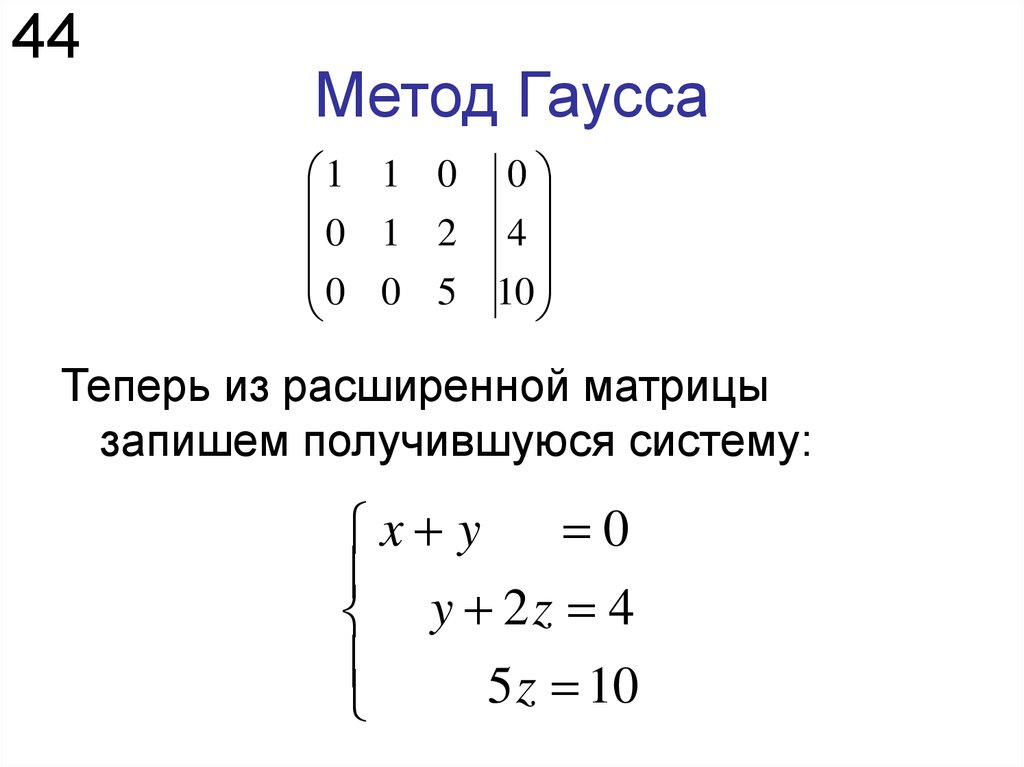 Это x решает для Ax = 0.
Это x решает для Ax = 0.
Таким образом, если мы находим конкретное решение этого, некоторого x, которое решает Ax = b, мы должны также добавить все наши нулевые пространственные векторы для полного ответа. Поскольку все векторы нулевого пространства делают Ax = 0, наш полный ответ должен включать A(x_null + x_particular) = b, поскольку добавление нулевого пространства ничего не делает с b, поскольку Ax_null = 0,
Если это не имеет смысла, продолжим.
Давайте сначала найдем частное решение этого уравнения. Это x , которое непосредственно решает для Ax = b.
Поиск конкретного решения
Мы стремимся найти конкретное решение, некоторое значение x, y, z и t, которое соответствует нашему ответу (1, 3, 0). Поскольку у нас есть только двух полных уравнений, мы можем найти только две из этих переменных. Два других мы должны будем установить в константы.
Опять же, аналогично решению для нулевого пространства, переменные, которые мы установим в качестве констант, будут свободными переменными. Это переменные, связанные со свободными столбцами, то есть столбцами, не содержащими сводных данных.
Это переменные, связанные со свободными столбцами, то есть столбцами, не содержащими сводных данных.
У нас снова двойная бесконечность ответов, так как у нас есть две переменные, которые мы можем установить как любых констант. Таким образом, у нас есть бесконечное количество частных ответов, которые решают (1, 3, 0). Итак, если мы можем выбрать любую константу для y или t, мы можем выбрать самую простую, то есть 0, для обоих.
После этого наша линейная комбинация и система уравнений выглядят так:
Таким образом, одно из (наших многих возможных) частных решений было принято. Как я уже сказал, это не полный ответ. Мы можем добавить любой вектор из нулевого пространства (и любой из их кратных) к этому конкретному ответу и все равно получить Ax = b, поскольку все эти векторы нулевого пространства составляют Ax = 0.
Таким образом, мы также должны найти нулевое значение космические векторы. Я уже рассказал, как вычислять нулевые пространственные векторы в очень похожей матрице, поэтому на этот раз я не буду подробно рассказывать об этом, а просто дам вам ответы на нулевые пространственные векторы.
Итак, теперь мы можем добавить эту комбинацию к нашему единственному конкретному ответу. Важно отметить, что, хотя векторы нулевого пространства представляют собой комбинацию, мы не можем поставить кратное перед нашим конкретным ответом — поскольку наша правая часть не равна нулю, мы не можем просто умножить каждые x, y, z, t и получите эквивалентный ответ. Итак, наш окончательный ответ:
Как выглядит этот ответ графически? Ну, это , а не подпространство. Вы можете думать об этом как о почти расширенном нулевом пространстве — нулевом пространстве, но с каждой точкой, сдвинутой на вектор хп. Таким образом бежим уже не через ориджин, а хп.
И это наше полное решение Ax = b.
Есть еще кое-что. Как и в нашей статье с нулевым пространством, мы можем использовать сокращенную форму -строки-эшелона , чтобы сделать ответ еще проще.
Немедленное нахождение конкретного решения с помощью RREF
Вернемся к тому моменту, когда у нас была система Ux = c. Мы можем дополнительно сократить это U до R и довести наше c до 9.0003 д. Как бы мы это сделали?
Мы можем дополнительно сократить это U до R и довести наше c до 9.0003 д. Как бы мы это сделали?
Ну, как и в предыдущей статье, мы будем использовать исключение Gauss-Jordan для устранения вверх после объединения всех разворотов в один. Единственная дополнительная трудность заключается в том, что мы должны проделать те же операции и с правой частью, поскольку правая часть теперь не равна нулю.
Единственный стержень, который нам нужно превратить в ноль, находится во второй строке. Разделите каждый элемент в строке и соответствующий элемент в b, , чтобы сделать это.
Затем мы можем умножить эту вторую строку на три, чтобы исключить три над точкой опоры в первой строке. Затем то же самое делаем с правой стороны.
Теперь наша матричная система находится в Rx = b. Теперь мы можем напрямую извлечь наше конкретное решение xp. Ответ скрыт у всех на виду.
Так как мы превращаем наши свободные переменные y и t в 0. В форме линейной комбинации эти нули исключают два свободных столбца 2 и 4.
В форме линейной комбинации эти нули исключают два свободных столбца 2 и 4.
Тогда у нас остается тождество, умноженное на х = д.
Итак, чтобы решить это, наше конкретное решение ЕСТЬ d. Таким образом, при поиске частного решения мы можем просто преобразовать нашу матрицу A в R и взять правую часть d в качестве нашего частного решения.
[Решено] Матрица коэффициентов преобразована в; Когда AX = B IS SOLV
- Нижний треугольный
- Верхний треугольный
- Диагональная матрица
- Треугольная
Вариант 3: Диагональная матрица
MPSC AE. 3,2 тыс. пользователей
100 вопросов
200 марок
120 минут
Разница между методом исключения Гаусса и методом исключения Гаусса-Жордана:
1) Исключение Гаусса выполняется путем выполнения элементарных операций над строками для получения нулей ниже диагонали матрицы коэффициентов, чтобы привести ее к ступенчатой форме. Как только это сделано, проверка нижних строк и обратная подстановка в верхние строки определяют значения неизвестных.
Как только это сделано, проверка нижних строк и обратная подстановка в верхние строки определяют значения неизвестных.
2) Можно сократить (или полностью исключить) вычисления, связанные с обратной заменой, путем выполнения дополнительных операций со строками для преобразования матрицы из ступенчатой формы в 9-ступенчатую.0007 сокращенная форма эшелон .
3) Матрица имеет уменьшенную ступенчатую форму, когда помимо ступенчатой формы каждый столбец, содержащий ненулевой элемент , содержит нули не только под этим элементом, но и над ним.
Чтобы преобразовать любую матрицу в ее уменьшенную ступенчатую форму строк, выполняется исключение Гаусса-Жордана. Существуют три элементарные операции со строками, используемые для получения уменьшенной эшелонированной формы строк:
1) Переключить две строки.
2) Умножить строку на любую ненулевую константу.
3) Добавить скалярное число, кратное одной строке, к любой другой строке.
Пример:
Эшелонная форма
\( \left[ {\begin{array}{*{20}{c}} a&b&c\\ 0&d&e\\ 0&0&f \end{array}} right]\)
Сокращенная форма Echelon
\( \left[ {\begin{array}{*{20}{c}} 1&0&0\\ 0&1&0\\ 0&0&1 \end{array}} \right]\ )
∴ Матрица коэффициентов преобразуется в диагональную матрицу с использованием метода исключения Гаусса Жордана.
Скачать решение PDFПоделиться в WhatsApp
Последние обновления MPSC AE
Последнее обновление: 6 февраля 2023 г.
Список квалифицированных кандидатов в области гражданского строительства MPSC AE опубликован 3 февраля 2023 года! Список для электриков был объявлен 20 января 2023 года. Комиссия по государственной службе штата Махараштра (MPSC) выпустила новое уведомление для MPSC AE Recruitment. Всего была открыта 151 вакансия по гражданским, механическим и электрическим дисциплинам.