Строительная механика
Строительная механика
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ Глава 1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ СООРУЖЕНИЙ § 1.  § 1.3. УСЛОВИЯ СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ ГЕОМЕТРИЧЕСКИ НЕИЗМЕНЯЕМЫХ СТЕРЖНЕВЫХ СИСТЕМ Глава 2. БАЛКИ § 2.2. ЛИНИИ ВЛИЯНИЯ ОПОРНЫХ РЕАКЦИЙ ДЛЯ ОДНОПРОЛЕТНЫХ И КОНСОЛЬНЫХ БАЛОК § 2.3. ЛИНИИ ВЛИЯНИЯ ИЗГИБАЮЩИХ МОМЕНТОВ И ПОПЕРЕЧНЫХ СИЛ ДЛЯ ОДНОПРОЛЕТНЫХ И КОНСОЛЬНЫХ БАЛОК § 2.4. ЛИНИИ ВЛИЯНИЯ ПРИ УЗЛОВОЙ ПЕРЕДАЧЕ НАГРУЗКИ § 2.5. ОПРЕДЕЛЕНИЕ УСИЛИЙ С ПОМОЩЬЮ ЛИНИЙ ВЛИЯНИЯ § 2.6. ОПРЕДЕЛЕНИЕ НЕВЫГОДНЕЙШЕГО ПОЛОЖЕНИЯ НАГРУЗКИ НА СООРУЖЕНИИ. ЭКВИВАЛЕНТНАЯ НАГРУЗКА § 2.7. МНОГОПРОЛЕТНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ § 2.8. ОПРЕДЕЛЕНИЕ УСИЛИЙ В МНОГОПРОЛЕТНЫХ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ БАЛКАХ ОТ НЕПОДВИЖНОЙ НАГРУЗКИ § 2.9. ЛИНИИ ВЛИЯНИЯ УСИЛИЙ ДЛЯ МНОГОПРОЛЕТНЫХ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ БАЛОК § 2.11. ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ В БАЛКАХ КИНЕМАТИЧЕСКИМ МЕТОДОМ Глава 3. ТРЕХШАРНИРНЫЕ АРКИ И РАМЫ § 3. 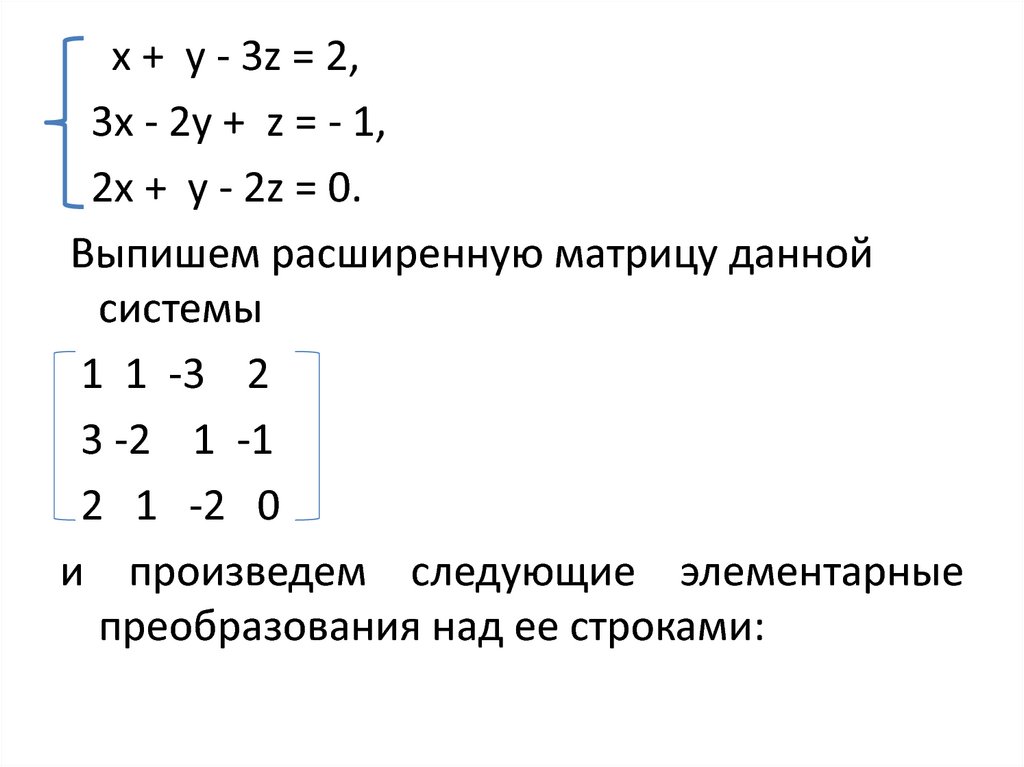 1. ПОНЯТИЕ ОБ АРКЕ И СРАВНЕНИЕ ЕЕ С БАЛКОЙ 1. ПОНЯТИЕ ОБ АРКЕ И СРАВНЕНИЕ ЕЕ С БАЛКОЙ§ 3.2. АНАЛИТИЧЕСКИЙ РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ § 3.3. ГРАФИЧЕСКИЙ РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ. МНОГОУГОЛЬНИК ДАВЛЕНИЯ § 3.4. УРАВНЕНИЕ РАЦИОНАЛЬНОЙ ОСИ ТРЕХШАРНИРНОЙ АРКИ § 3.5. РАСЧЕТ ТРЕХШАРНИРНЫХ АРОК НА ПОДВИЖНУЮ НАГРУЗКУ § 3.6. ЯДРОВЫЕ МОМЕНТЫ И НОРМАЛЬНЫЕ НАПРЯЖЕНИЯ § 4.1. ПОНЯТИЕ О ФЕРМЕ. КЛАССИФИКАЦИЯ ФЕРМ § 4.2. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПРОСТЕЙШИХ ФЕРМ § 4.3. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ СЛОЖНЫХ ФЕРМ § 4.4. РАСПРЕДЕЛЕНИЕ УСИЛИЙ В ЭЛЕМЕНТАХ ФЕРМ РАЗЛИЧНОГО ОЧЕРТАНИЯ § 4.5. ИССЛЕДОВАНИЕ НЕИЗМЕНЯЕМОСТИ ФЕРМ § 4.6. ЛИНИИ ВЛИЯНИЯ УСИЛИИ В СТЕРЖНЯХ ПРОСТЕЙШИХ ФЕРМ § 4.7. ЛИНИИ ВЛИЯНИЯ УСИЛИЙ В СТЕРЖНЯХ СЛОЖНЫХ ФЕРМ § 4.8. ШПРЕНГЕЛЬНЫЕ СИСТЕМЫ § 4,9. ТРЕХШАРНИРНЫЕ АРОЧНЫЕ ФЕРМЫ И КОМБИНИРОВАННЫЕ СИСТЕМЫ Глава 5. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В УПРУГИХ СИСТЕМАХ § 5.2. ТЕОРЕМА О ВЗАИМНОСТИ РАБОТ § 5.3. ТЕОРЕМА О ВЗАИМНОСТИ ПЕРЕМЕЩЕНИЙ § 5.4. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ.  § 5.5. ПРАВИЛО ВЕРЕЩАГИНА § 5.6. ПРИМЕРЫ РАСЧЕТА § 5.7. ТЕМПЕРАТУРНЫЕ ПЕРЕМЕЩЕНИЯ § 5.8. ЭНЕРГЕТИЧЕСКИЙ ПРИЕМ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ § 5.9. ПЕРЕМЕЩЕНИЯ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ, ВЫЗЫВАЕМЫЕ ПЕРЕМЕЩЕНИЯМИ ОПОР Глава 6. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ СИЛ § 6.2. КАНОНИЧЕСКИЕ УРАВНЕНИЯ МЕТОДА СИЛ § 6.3. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ НА ДЕЙСТВИЕ ЗАДАННОЙ НАГРУЗКИ § 6.4. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ § 6.5. СОСТАВЛЕНИЕ КАНОНИЧЕСКИХ УРАВНЕНИЙ ПРИ РАСЧЕТЕ СИСТЕМ НА ПЕРЕМЕЩЕНИЯ ОПОР § 6.7. ПОСТРОЕНИЕ ЭПЮР ПОПЕРЕЧНЫХ И ПРОДОЛЬНЫХ СИЛ. ПРОВЕРКА ЭПЮР § 6.8. СПОСОБ УПРУГОГО ЦЕНТРА § 6.9. ЛИНИИ ВЛИЯНИЯ ПРОСТЕЙШИХ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ § 6.10. ИСПОЛЬЗОВАНИЕ СИММЕТРИИ § 6.11. ГРУППИРОВКА НЕИЗВЕСТНЫХ § 6.12. СИММЕТРИЧНЫЕ И ОБРАТНОСИММЕТРИЧНЫЕ НАГРУЗКИ § 6.13. СПОСОБ ПРЕОБРАЗОВАНИЯ НАГРУЗКИ § 6.  14. ПРОВЕРКА КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ 14. ПРОВЕРКА КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ§ 6.15. ПРИМЕРЫ РАСЧЕТА РАМ § 6.16. «МОДЕЛИ» ЛИНИЙ ВЛИЯНИЯ УСИЛИИ ДЛЯ НЕРАЗРЕЗНЫХ БАЛОК § 7.2. ОПРЕДЕЛЕНИЕ ЧИСЛА НЕИЗВЕСТНЫХ § 7.3. ОСНОВНАЯ СИСТЕМА § 7.4. КАНОНИЧЕСКИЕ УРАВНЕНИЯ § 7.5. СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ § 7.6. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ ПЕРЕМНОЖЕНИЕМ ЭПЮР § 7.7. ПРОВЕРКА КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ МЕТОДА ПЕРЕМЕЩЕНИЙ § 7.8. ПОСТРОЕНИЕ ЭПЮР M, Q И N В ЗАДАННОЙ СИСТЕМЕ § 7.9. РАСЧЕТ МЕТОДОМ ПЕРЕМЕЩЕНИЙ НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ § 7.10. ИСПОЛЬЗОВАНИЕ СИММЕТРИИ ПРИ РАСЧЕТЕ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ § 7.11. ПРИМЕР РАСЧЕТА РАМЫ МЕТОДОМ ПЕРЕМЕЩЕНИЙ § 7.13. КОМБИНИРОВАННОЕ РЕШЕНИЕ ЗАДАЧ МЕТОДАМИ СИЛ И ПЕРЕМЕЩЕНИЙ § 7.  14. ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ МЕТОДОМ ПЕРЕМЕЩЕНИЙ 14. ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ МЕТОДОМ ПЕРЕМЕЩЕНИЙГлава 8. ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ СТРОИТЕЛЬНОЙ МЕХАНИКИ СТЕРЖНЕВЫХ СИСТЕМ И МЕТОДЫ ЕЕ РЕШЕНИЯ § 8.2. СОСТАВЛЕНИЕ УРАВНЕНИЙ РАВНОВЕСИЯ, СТАТИЧЕСКИЕ УРАВНЕНИЯ. ИССЛЕДОВАНИЕ ОБРАЗОВАНИЯ СИСТЕМ § 8.3. СОСТАВЛЕНИЕ УРАВНЕНИЙ СОВМЕСТНОСТИ, ГЕОМЕТРИЧЕСКИЕ УРАВНЕНИЯ. ПРИНЦИП ДВОЙСТВЕННОСТИ § 8.4. ЗАКОН ГУКА. ФИЗИЧЕСКИЕ УРАВНЕНИЯ § 8.5. СИСТЕМА УРАВНЕНИЙ СТРОИТЕЛЬНОЙ МЕХАНИКИ. СМЕШАННЫЙ МЕТОД § 8.6. МЕТОД ПЕРЕМЕЩЕНИЙ § 8.8. УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ И ИХ СВЯЗЬ С УРАВНЕНИЯМИ СТРОИТЕЛЬНОЙ МЕХАНИКИ Глава 9. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЭВМ § 9.2. ПОЛУАВТОМАТИЗИРОВАННЫЙ РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ КАЛЬКУЛЯТОРОВ § 9.3. АВТОМАТИЗАЦИЯ РАСЧЕТА СТЕРЖНЕВЫХ СИСТЕМ. ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ СТРОИТЕЛЬНОЙ МЕХАНИКИ ДЛЯ СТЕРЖНЯ § 9.4. МАТРИЦЫ РЕАКЦИЙ (ЖЕСТКОСТИ) ДЛЯ ПЛОСКИХ И ПРОСТРАНСТВЕННЫХ СТЕРЖНЕЙ И ИХ ИСПОЛЬЗОВАНИЕ § 9.5. ОПИСАНИЕ УЧЕБНОГО КОМПЛЕКСА ПО РАСЧЕТУ СТЕРЖНЕВЫХ СИСТЕМ. 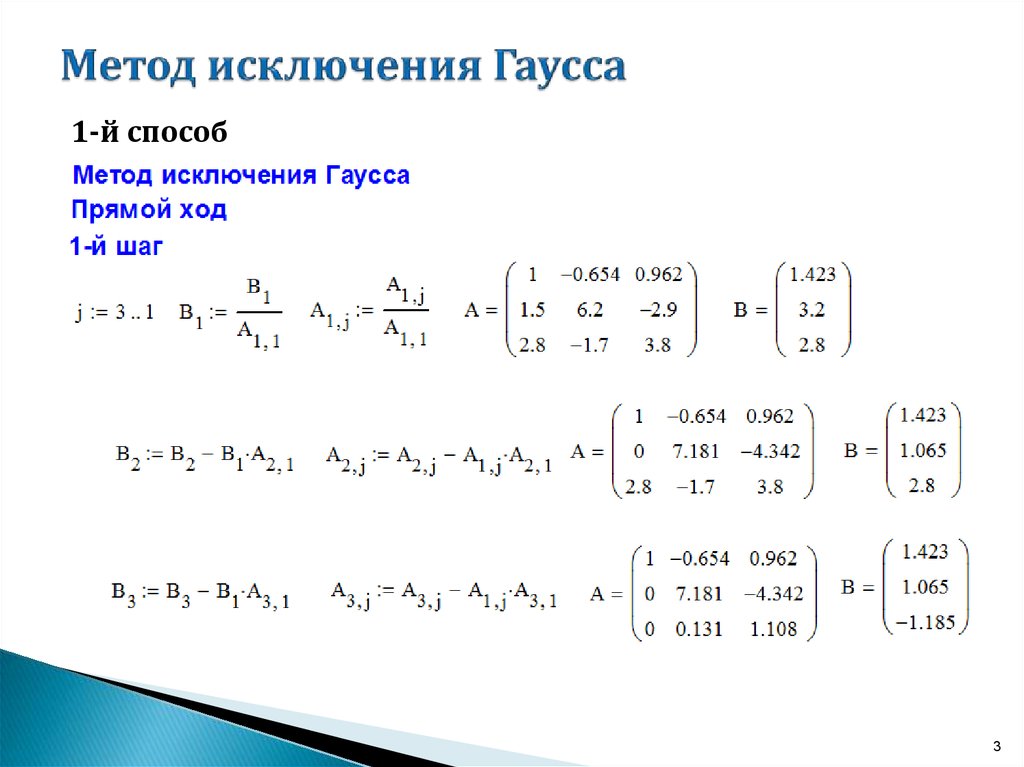 ВНУТРЕННЕЕ И ВНЕШНЕЕ ПРЕДСТАВЛЕНИЕ ИСХОДНЫХ ДАННЫХ. БЛОК-СХЕМА КОМПЛЕКСА ПО РАСЧЕТУ СТЕРЖНЕВЫХ СИСТЕМ ВНУТРЕННЕЕ И ВНЕШНЕЕ ПРЕДСТАВЛЕНИЕ ИСХОДНЫХ ДАННЫХ. БЛОК-СХЕМА КОМПЛЕКСА ПО РАСЧЕТУ СТЕРЖНЕВЫХ СИСТЕМ§ 10.2. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ С УЧЕТОМ ГЕОМЕТРИЧЕСКОЙ НЕЛИНЕЙНОСТИ § 10.3. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ § 10.4. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ С УЧЕТОМ ФИЗИЧЕСКОЙ НЕЛИНЕЙНОСТИ. ПРЕДЕЛЬНОЕ СОСТОЯНИЕ Глава 11. МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ (МКЭ) § 11.2. СВЯЗЬ МКЭ С УРАВНЕНИЯМИ СТРОИТЕЛЬНОЙ МЕХАНИКИ § 11.3. ПОСТРОЕНИЕ МАТРИЦ ЖЕСТКОСТИ ДЛЯ РЕШЕНИЯ ПЛОСКОЙ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ § 11.4. ПРЕДЕЛЬНЫЙ ПЕРЕХОД ДЛЯ ПЛОСКОЙ ЗАДАЧИ § 11.5. ПОСТРОЕНИЕ МАТРИЦ ЖЕСТКОСТИ ДЛЯ РЕШЕНИЯ ОБЪЕМНОЙ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ § 11.7. ПОСТРОЕНИЕ МАТРИЦ РЕАКЦИЙ ДЛЯ РАСЧЕТА ПЛАСТИНОК И ОБОЛОЧЕК § 11.8. ОСОБЕННОСТИ КОМПЛЕКСОВ ДЛЯ РАСЧЕТА КОНСТРУКЦИЙ ПО МКЭ. СУПЕРЭЛЕМЕНТНЫЙ ПОДХОД Глава 12. ОСНОВЫ ДИНАМИКИ СООРУЖЕНИЙ § 12. 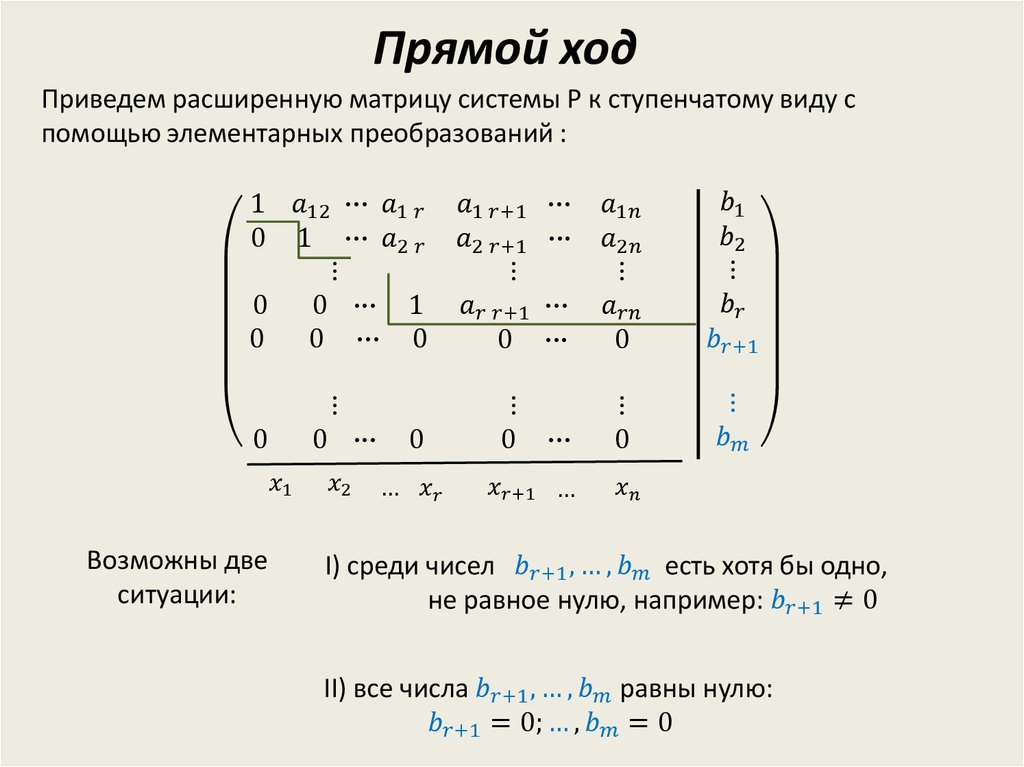 2. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 2. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ§ 12.3. РАСЧЕТ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ ПРИ ДЕЙСТВИИ ПЕРИОДИЧЕСКОЙ НАГРУЗКИ § 12.4. РАСЧЕТ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ ПРИ ДЕЙСТВИИ ПРОИЗВОЛЬНОЙ НАГРУЗКИ. ИНТЕГРАЛ ДЮАМЕЛЯ § 12.5. ДВИЖЕНИЕ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ. ПРИВЕДЕНИЕ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ К ДВУМ СИСТЕМАМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ § 12.7. ПРИВЕДЕНИЕ КИНЕМАТИЧЕСКОГО ВОЗДЕЙСТВИЯ К СИЛОВОМУ § 12.8. СВЕДЕНИЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДИНАМИКИ К РАЗДЕЛЯЮЩИМСЯ УРАВНЕНИЯМ С ПОМОЩЬЮ РЕШЕНИЯ ПРОБЛЕМЫ СОБСТВЕННЫХ ЗНАЧЕНИЙ § 12.9. МЕТОД ПОСТОЯННОГО УСКОРЕНИЯ И ЕГО ИСПОЛЬЗОВАНИЕ ДЛЯ РЕШЕНИЯ ДИНАМИЧЕСКИХ ЗАДАЧ Глава 13. СВЕДЕНИЯ ИЗ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ, ИСПОЛЬЗУЕМЫЕ В СТРОИТЕЛЬНОЙ МЕХАНИКЕ § 13.2. МАТРИЦЫ, ИХ ВИДЫ, ПРОСТЕЙШИЕ ОПЕРАЦИИ НАД МАТРИЦАМИ § 13.3. ПЕРЕМНОЖЕНИЕ МАТРИЦ. ОБРАТНАЯ МАТРИЦА § 13.4. МЕТОД ГАУССА ДЛЯ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ.  § 13.5. ИССЛЕДОВАНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ. ОДНОРОДНЫЕ УРАВНЕНИЯ. РЕШЕНИЕ n УРАВНЕНИЙ С m НЕИЗВЕСТНЫМИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ГАУССА § 13.6. КВАДРАТИЧНАЯ ФОРМА. МАТРИЦА КВАДРАТИЧНОЙ ФОРМЫ. ПРОИЗВОДНАЯ ОТ КВАДРАТИЧНОЙ ФОРМЫ § 13.7. СОБСТВЕННЫЕ ЧИСЛА И СОБСТВЕННЫЕ ВЕКТОРЫ ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННОЙ МАТРИЦЫ § 13.8. ОДНОРОДНЫЕ КООРДИНАТЫ И ИНТЕГРИРОВАНИЕ ПО ТРЕУГОЛЬНОЙ ОБЛАСТИ § 13.9. СООТНОШЕНИЯ МЕЖДУ ТРИГОНОМЕТРИЧЕСКИМИ, ГИПЕРБОЛИЧЕСКИМИ ФУНКЦИЯМИ И ЭКСПОНЕНЦИАЛЬНОЙ ФУНКЦИЕЙ ЗАКЛЮЧЕНИЕ ЛИТЕРАТУРА |
Матрица. Метод Гаусса
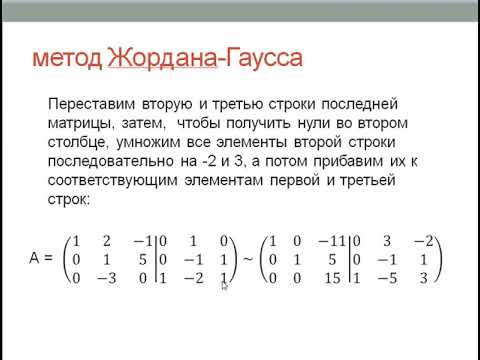
Элементарные преобразования системы используются в методе Гаусса.
Для простоты рассмотрим метод Гаусса для системы трех линейных уравнений с тремя неизвестными в случае, когда существует единственное решение:
Дана система:
( 1 )
1-ый
шаг метода Гаусса.
На первом шаге исключим неизвестное х1 из всех уравнений системы (1), кроме первого. Пусть коэффициент . Назовем его ведущим элементом. Разделим первое уравнение системы (1) на а11. Получим уравнение:
( 2 )
где
Исключим х1 из второго и третьего уравнений системы (1). Для этого вычтем из них уравнение (2), умноженное на коэффициент при х1 (соответственно а21 и а31).
Система примет
вид:
( 3 )
Верхний индекс (1) указывает, что речь идет о коэффициентах первой преобразованной системы.
2-ой
шаг метода Гаусса.
На втором шаге
исключим неизвестное х2 из третьего уравнения системы (3). Пусть
коэффициент
. Выберем его за ведущий элемент и разделим
на него второе уравнение системы (3), получим
уравнение:
Пусть
коэффициент
. Выберем его за ведущий элемент и разделим
на него второе уравнение системы (3), получим
уравнение:
( 4 )
где
Из третьего
уравнения системы (3) вычтем уравнение
(4), умноженное на
Получим уравнение:
Предполагая, что
находим
В результате преобразований
система приняла вид:
(5)
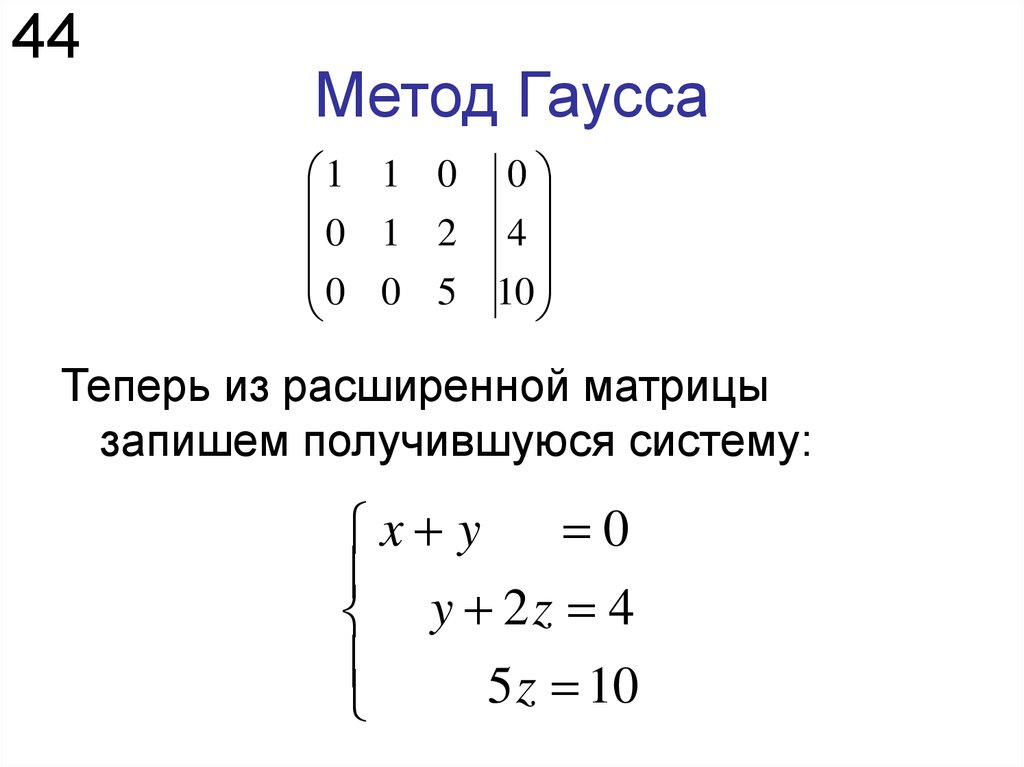
Система вида (5) называется треугольной.
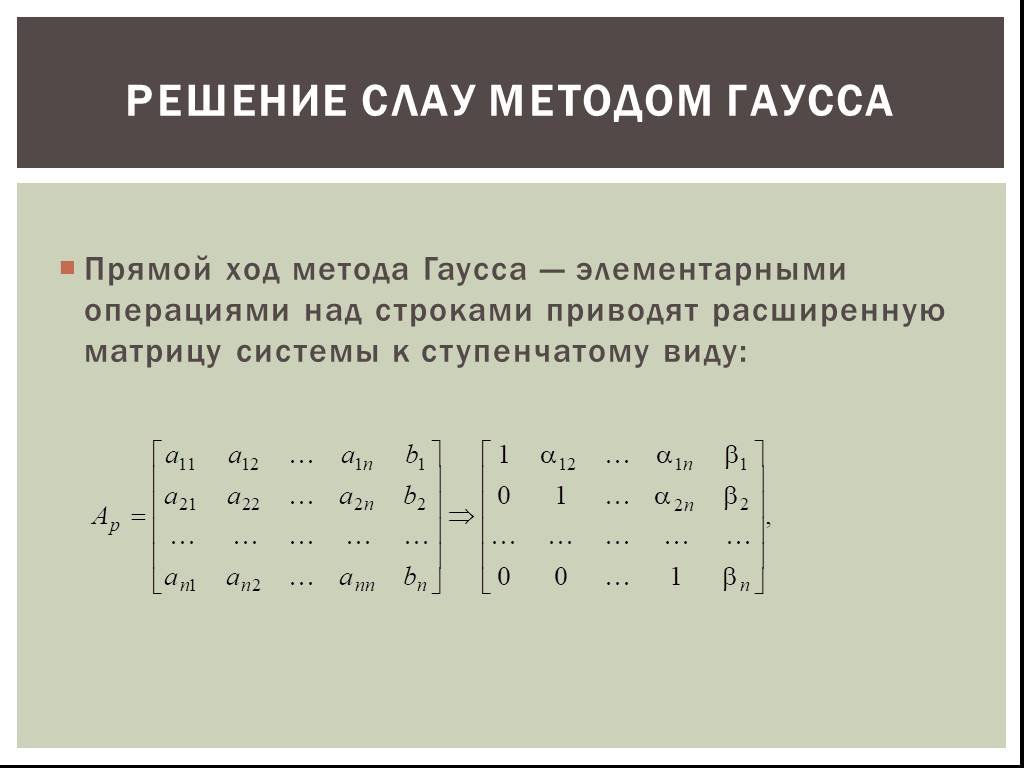
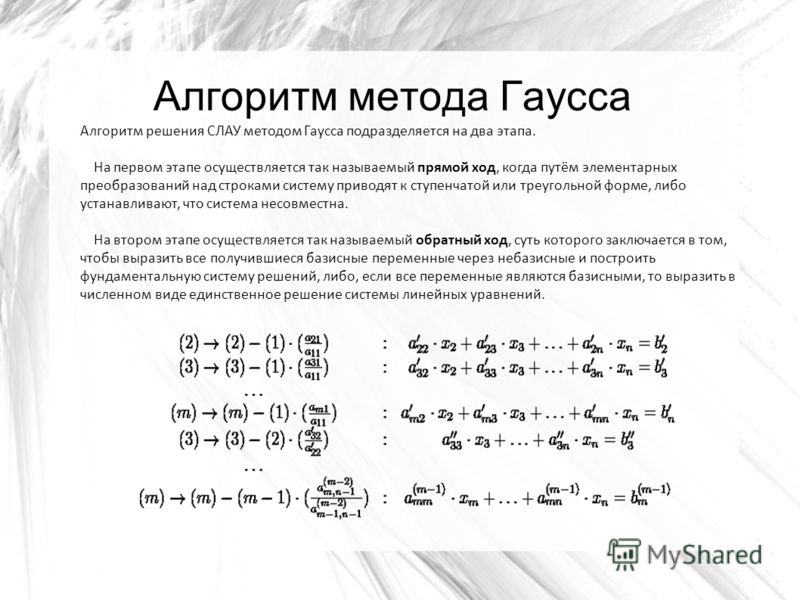
Процесс приведения системы (1) к треугольному виду (5) (шаги 1 и 2) называют прямым ходом метода Гаусса.
Нахождение неизвестных из треугольной системы называют обратным ходом метода Гаусса.
Для этого найденное
значение х3 подставляют во второе уравнение системы
(5) и находят х2. Затем х2 и х3 подставляют в первое
уравнение и находят х1.
Затем х2 и х3 подставляют в первое
уравнение и находят х1.
В общем случае для системы т линейных уравнений с п неизвестными проводятся аналогичные преобразования. На каждом шаге исключается одно из неизвестных из всех уравнений, расположенных ниже ведущего уравнения.
Отсюда другое называние метода Гаусса – метод последовательного исключения неизвестных.
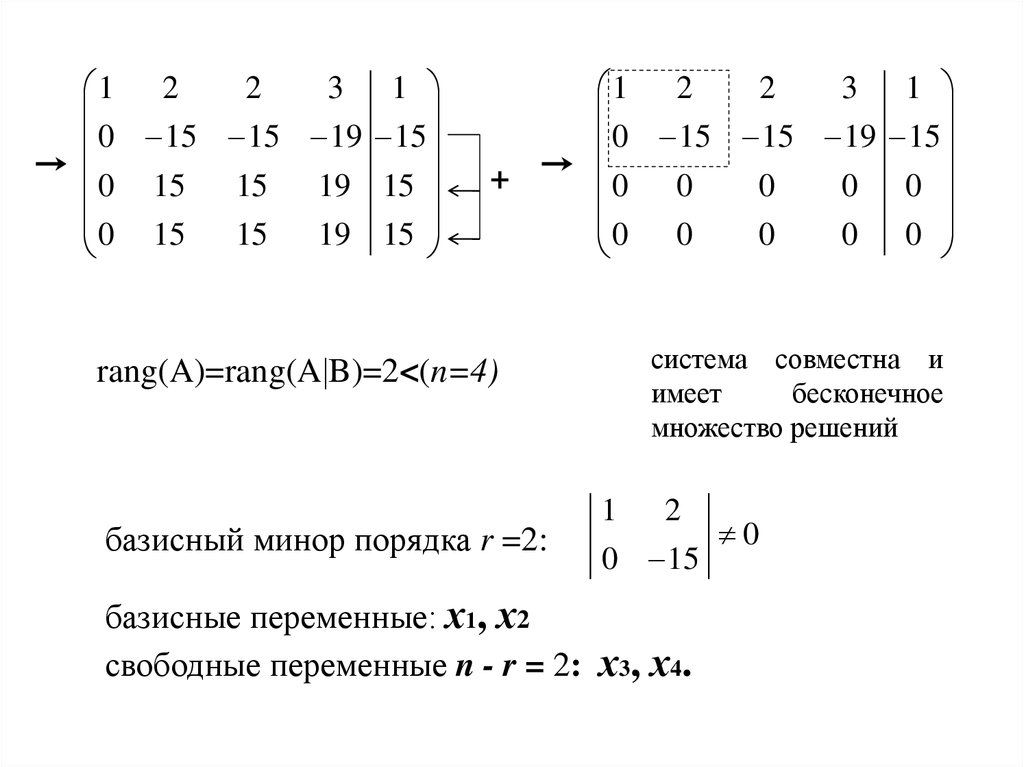
Если в ходе преобразований системы получается противоречивое уравнение вида 0 = b, где b ¹ 0, то это означает, что система несовместна и решений не имеет.
В случае совместной системы после преобразований по методу Гаусса, составляющих прямой ход метода, система т линейных уравнений с п неизвестными будет приведена или к треугольному или к ступенчатому виду.
Треугольная система имеет вид:
Такая система
имеет единственное решение, которое
находится в результате проведения
обратного хода метода гаусса.
Ступенчатая система имеет вид:
Такая система имеет бесчисленное множество решений. Чтобы найти эти решения, во всех уравнениях системы члены с неизвестными хk+1, … , xk переносят в правую часть. Эти неизвестные называются свободными и придают им произвольные значения. Из полученной треугольной системы находим х1, … , xk, которые будут выражаться через свободные неизвестные. Подробнее об этом можно узнать в рекомендуемой литературе.
Рассмотренный
метод Гаусса легко программируется
на ЭВМ и является более экономичным
(по числу действий), чем другие методы.
ЗАКЛЮЧЕНИЕ
Рассмотренные
на лекции матрицы являются удобным
инструментом для записи различных математических
преобразований и широко используется
в научно-технической литературе. Метод
Гаусса позволяет решать любые линейные
системы, он находит широкое применение
и содержится в пакетах стандартных программ
для ЭВМ.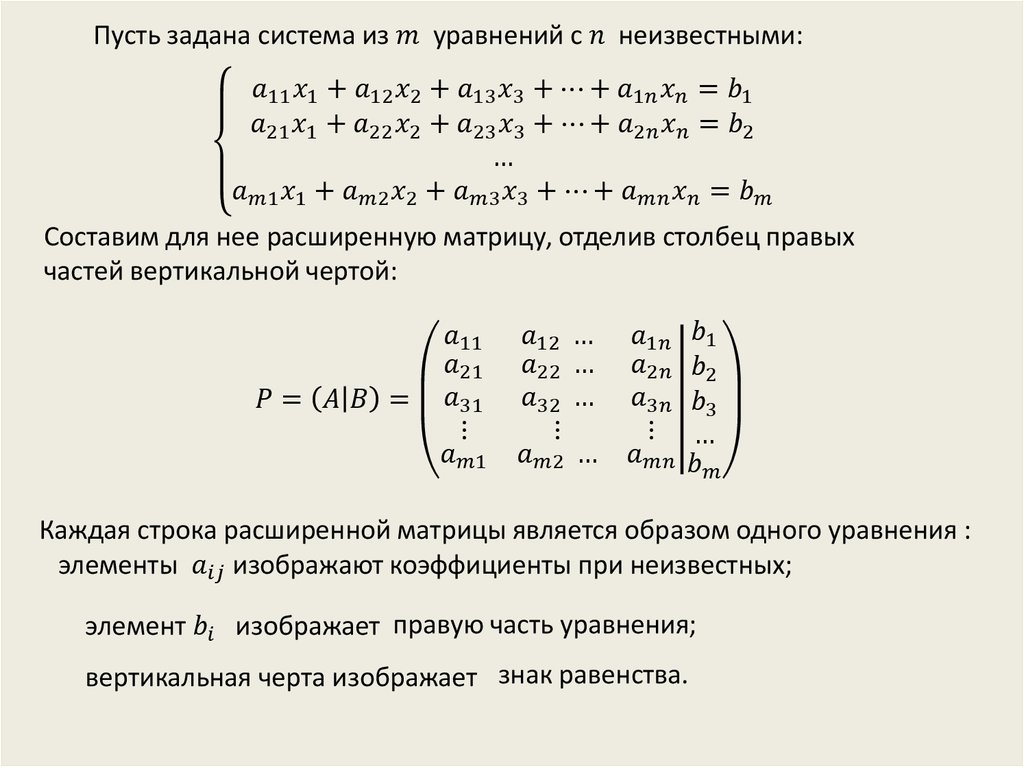
Integral Matrix Root Gram and Lattice Gaussian Sampled Without floats
Paper 2019/320
Integral Matrix Root Gram and Lattice Gaussian Sampled Without floats
Лео Дукас, Стивен Гэлбрейт, Томас Прест и Ян Юй
Abstract
Многие продвинутые криптосистемы на основе решетки требуют выборки точек решетки из гауссовых распределений. Одна из проблем для этой задачи заключается в том, что все современные алгоритмы в какой-то момент прибегают к арифметике с плавающей запятой (FPA), которая на практике имеет множество недостатков: она требует числового анализа стабильности, дополнительной памяти для высокой точности, ленивых методов / методов возврата для эффективности, и может страдать слабым детерминизмом, который может полностью сломать определенные схемы.
В этой статье мы даем методы реализации гауссовой выборки на общих решетках без использования FPA. С этой целью мы вернемся к подходу Пайкерта, используя выборку возмущений.
Подход Пайкерта использует непрерывную гауссову выборку и некоторую декомпозицию $\mathbf{\Sigma} = \mathbf{A} \mathbf{A}^t$ целевой ковариационной матрицы $\mathbf{\Sigma}$. Предлагаемое разложение, например. разложение Холецкого дает квадратную матрицу $\mathbf{A}$ с действительными (не целыми) элементами.
Наша идея, в двух словах, состоит в том, чтобы заменить это разложение интегральным. Хотя в общем случае целочисленного решения не существует, если мы ограничим $\mathbf{A}$ квадратной матрицей, мы показываем, что такое разложение может быть эффективно найдено, если позволить $\mathbf{A}$ быть шире (скажем, $n \ раз 9п$). Это можно рассматривать как распространение теоремы четырех квадратов Лагранжа на матрицы.
Кроме того, мы адаптируем наш алгоритм интегральной декомпозиции к параметрам кольца: для циклотомики степени 2 мы можем использовать структуру башни колец для повышения сложности и компактности.
Предлагаемое разложение, например. разложение Холецкого дает квадратную матрицу $\mathbf{A}$ с действительными (не целыми) элементами.
Наша идея, в двух словах, состоит в том, чтобы заменить это разложение интегральным. Хотя в общем случае целочисленного решения не существует, если мы ограничим $\mathbf{A}$ квадратной матрицей, мы показываем, что такое разложение может быть эффективно найдено, если позволить $\mathbf{A}$ быть шире (скажем, $n \ раз 9п$). Это можно рассматривать как распространение теоремы четырех квадратов Лагранжа на матрицы.
Кроме того, мы адаптируем наш алгоритм интегральной декомпозиции к параметрам кольца: для циклотомики степени 2 мы можем использовать структуру башни колец для повышения сложности и компактности.
Метаданные
- Доступный(е) формат(ы)
- Категория
- Криптография с открытым ключом
- Информация о публикации
- Незначительная редакция публикации IACR в EUROCRYPT 2020
- Ключевые слова
- Криптография на основе решеткиДискретная гауссовская выборкаМатричная декомпозиция
- Связаться с автором(ами)
- ducas @ cwi nl
s galbraith @ auckland ac nz
thomas perst @ pqshield com
yang yu0986 @ gmail com - История
- 30.
 05.2020: последняя из 6 ревизий
05.2020: последняя из 6 ревизий - 2019-03-29: получен
- Посмотреть все версии
- Короткий URL-адрес
- https://ia.cr/2019/320
- Лицензия
-
СС BY
БибТекс
@misc{cryptoeprint:2019/320,
автор = {Лео Дука и Стивен Гэлбрейт, Томас Перст и Ян Ю},
title = {Интегральный матричный корень Грама и решетчатая гауссовская выборка без поплавков},
какpublished = {Архив ePrint по криптологии, документ, 2019 г./320},
год = {2019},
примечание = {\url{https://eprint.iacr.org/2019/320}},
URL = {https://eprint.iacr.org/2019/320}
}
Примечание. В целях защиты конфиденциальности читателей, eprint.iacr.org не использует файлы cookie или встроенный сторонний контент.
scipy.ndimage.gaussian_filter — SciPy v1.
 10.0 Manual
10.0 Manual- scipy.ndimage.gaussian_filter( ввод , сигма , порядок=0 , вывод=нет , режим=’отражать’ , cval=0.0 , truncate=4.0 , * , radius=Нет )[источник]
Многомерный фильтр Гаусса.
- Параметры:
- ввод array_like
Входной массив.
- сигма скаляр или последовательность скаляров
Стандартное отклонение для ядра Гаусса. Стандарт отклонения фильтра Гаусса даны для каждой оси в виде последовательность или как одно число, и в этом случае оно равно для все оси.
- порядок целое число или последовательность целых чисел, опционально
Порядок фильтра по каждой оси задается как последовательность целых чисел или как одно число. Порядок 0 соответствует свертки с ядром Гаусса. Положительный заказ соответствует свертке с этой производной гауссиана.
- вывод массив или dtype, необязательный
Массив для размещения вывода или dtype возвращаемый массив. По умолчанию массив того же dtype, что и ввод будет создан.
- режим строка или последовательность, необязательно
Параметр режима определяет, как расширяется входной массив когда фильтр перекрывает границу. Проходя последовательность режимов с длиной, равной количеству измерений входного массива, различные режимы могут быть указаны вдоль каждой оси. Значение по умолчанию ‘отражать’. Допустимые значения и их поведение следующие:
- «отражать» ( d c b a | a b c d | d c b a )
Ввод расширяется за счет отражения о краю последнего пиксель. Этот режим также иногда называют полувыборочным. симметричный.
- ‘константа’ ( k k k k | a b c d | k k k k )
Ввод расширяется путем заполнения всех значений за краем с помощью то же постоянное значение, определенное параметром cval .

- ‘ближайший’ ( a a a a | a b c d | d d d d )
Ввод расширяется за счет репликации последнего пикселя.
- «зеркало» ( d c b | a b c d | c b a )
Ввод расширяется путем отражения относительно центра последнего пиксель. Этот режим также иногда называют полновыборочным. симметричный.
- ‘обтекание’ ( a b c d | a b c d | a b c d )
Ввод расширяется за счет переноса на противоположный край.
Для согласованности с функциями интерполяции следующий режим также можно использовать имена:
- «постоянная сетки»
Это синоним слова «постоянная».
- «решетка-зеркало»
Это синоним слова «отражать».
- «сетка-обертка»
Это синоним слова «обертка».
- cval скаляр, необязательный
Значение для заполнения границ ввода, если режим «постоянный».
 По умолчанию
0,0.
По умолчанию
0,0.- обрезать плавать, опционально
Усечение фильтра при таком количестве стандартных отклонений. По умолчанию 4.0.
- radius None или int или последовательность целых чисел, опционально
Радиус ядра Гаусса. Радиус указан для каждой оси как последовательность или как одно число, и в этом случае оно равно для всех осей. Если указано, размер ядра по каждой оси будет
2*radius + 1, а truncate игнорируется. По умолчанию нет.
- Возвращает:
- gaussian_filter ndarray
Возвращаемый массив той же формы, что и input .
Примечания
Многомерный фильтр реализован в виде последовательности Одномерные сверточные фильтры. Промежуточные массивы хранится в том же типе данных, что и выходные данные. Поэтому для вывода типы с ограниченной точностью, результаты могут быть неточными потому что промежуточные результаты могут быть сохранены с недостаточным точность.
Ядро Гаусса будет иметь размер
2*радиус + 1по каждой оси гдерадиус = круглый(усечение * сигма).Примеры
>>> из scipy.ndimage импортировать gaussian_filter >>> импортировать numpy как np >>> a = np.arange(50, step=2).reshape((5,5)) >>> а массив([[ 0, 2, 4, 6, 8], [10, 12, 14, 16, 18], [20, 22, 24, 26, 28], [30, 32, 34, 36, 38], [40, 42, 44, 46, 48]]) >>> gaussian_filter(a, sigma=1) массив([[ 4, 6, 8, 9, 11], [10, 12, 14, 15, 17], [20, 22, 24, 25, 27], [29, 31, 33, 34, 36], [35, 37, 39, 40, 42]])>>> из наборов данных импорта scipy >>> импортировать matplotlib.pyplot как plt >>> рис = plt.figure() >>> plt.gray() # показать отфильтрованный результат в оттенках серого >>> ax1 = fig.add_subplot(121) # левая сторона >>> ax2 = fig.add_subplot(122) # правая сторона >>> восхождение = наборы данных. восхождение() >>> результат = gaussian_filter(восхождение, сигма=5) >>> ax1.