
МОМЕНТ ИНЕРЦИИ • Большая российская энциклопедия
В книжной версии
Том 20. Москва, 2012, стр. 707
Скопировать библиографическую ссылку:
Авторы: В. А. Самсонов
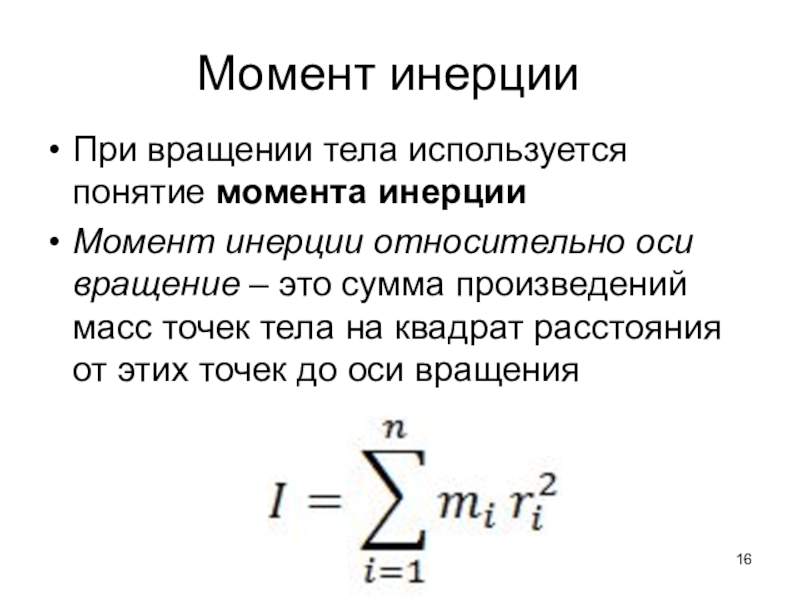
МОМЕ́НТ ИНЕ́РЦИИ тела, скалярная величина, мера инертности тела при его непоступательном (вращательном) движении. Величина М. и. зависит от распределения масс в теле. В механике различают осевые и центробежные М. и. Осевым М. и. тела называется величина, определяемая формулой $J=\sum_i M_ih_i^2$, где $M_i$ – массы точек тела, $h_i$ – их расстояния от оси.
Центробежными М. и. в системе координат $Oxyz$ называются величины $$J_{xy}=\sum_iM_ix_iy_i, \quad J_{yz}=\sum_iM_iy_iz_i, \quad J_{zx}=\sum_iM_iz_ix_i,$$ служащие характеристиками динамич. неуравновешенности вращающегося тела. Напр., при вращении вокруг оси $z$ силы давления на подшипники, в которых закреплена эта ось, пропорциональны значениям $J_{yz}$ и $J_{zx}$.
Если координатные оси системы $Oxyz$ связаны с самим телом, то величины $J_x, J_y, J_z, J_{xy}, J_{yz}, J_{zx}$ постоянны. Они образуют т. н. тензор инерции тела в точке $O$. Для каждой точки тела, выбранной за начало отсчёта системы $Oxyz$, можно указать взаимно перпендикулярные оси $x,y,z$, для которых $J_{xy}=J_{yz}=J_{zx}= 0$. Такие оси называют главными осями инерции.
В динамике твёрдого тела существует спец. раздел, называемый геометрией масс, в котором рассматриваются М.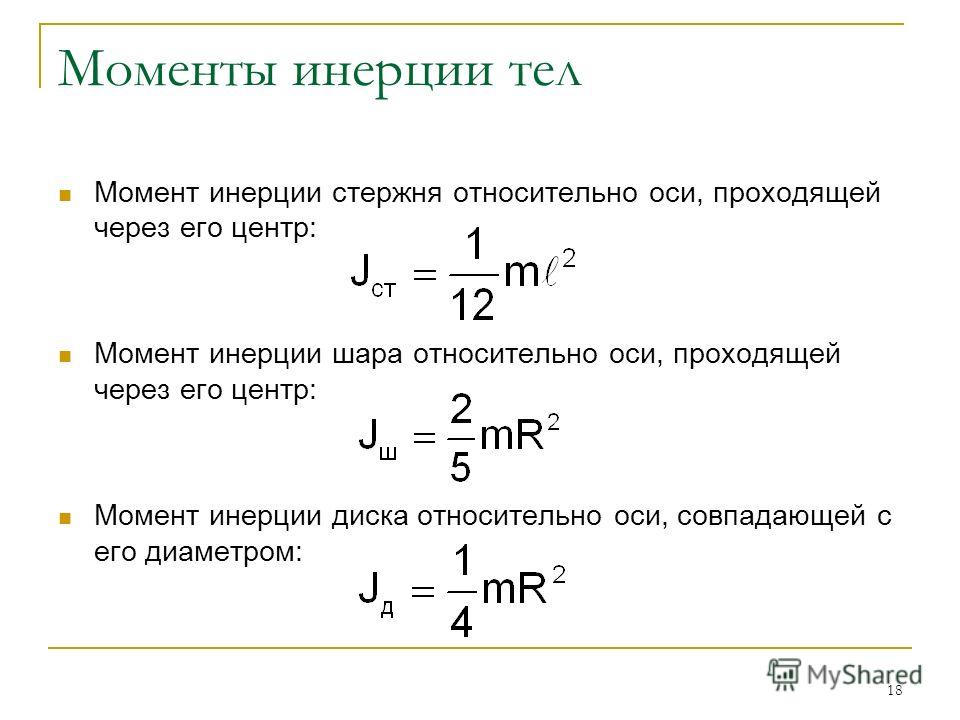 2$. М. и. тел сложной конфигурации определяются, как правило, экспериментально.
2$. М. и. тел сложной конфигурации определяются, как правило, экспериментально.
Понятие М. и. широко используется при решении мн. задач механики и техники (см. Вращающий момент, Кинетический момент, Динамика, Кинетическая энергия).
Момент инерции | Физика для студентов | Студенту | Статьи и обсуждение вопросов образования в Казахстане | Образовательный сайт Казахстана
При вращении твердого тела вокруг неподвижной оси отдельные точки тела описывают окружности, центры которых лежат на оси вращения. Основы кинематики вращательного движения были изложены в разделе 1.5.Моментом инерции I материальной точки называется скалярная физическая величина, определяемая произведением ее массы mна квадрат радиуса окружности R, по которой она может двигаться относительно некоторой произвольно выбранной оси ОО‛ (рис.4.1,а):
I=mR2
Рис.
 4.1. К определению понятия момента инерции
4.1. К определению понятия момента инерцииЕсли твердое тело, вращающееся относительно некоторой произвольно выбранной оси ОО’, представить в виде системы материальных точек массой dm и просуммировать моменты инерции этих так называемых элементарных масс, то получим момент инерции всего тела:
где ri – радиус вращения i–й элементарной массы, а интеграл берется по всему объему тела (рис. 4.1,б). Для однородных тел, для которых плотность ρ=m/V (где m – масса тела, а V – его объем, т.е. плотность определяется массой, заключенной в единице объема), момент инерции будет вычисляться по формул: Ниже приведены значения моментов инерции для некоторых однородных тел правильной формы с массой m относительно оси, проходящей через центр масс тела. Таблица 2 Моменты инерции тел правильной формы Для определения момента инерции тела относительно произвольной оси используется теорема Штейнера. Теорема Штейнера: если известен момент инерции тела относительно оси ОО’, проходящей через центр масс тела (обозначим его Io), то момент инерции тела относительно любой параллельной ей оси ZZ’ (обозначим его I) равен: I=Io+md2, где m – масса тела; d – расстояние между осями (рис.4.2).Тело Положение оси вращения Момент инерции Полый тонкостенный цилиндр радиусом R Ось симметрии mR2 Сплошной цилиндр или диск радиусом R Ось симметрии 0.  5*mR2
5*mR2Прямой тонкий стержень длиной l Ось перпендикулярна стержню и проходит через его середину 1/12*ml2 Шар радиусом R Ось проходит через центр шара 2/5*mR2
Рис.4.2. К теореме Штейнера
Момент инерции – Физическая энциклопедия
МОМЕНТ ИНЕРЦИИ – величина, характеризующая
распределение масс в теле и являющаяся наряду с массой мерой инертности тела
при непоступат. движении.
где mi – массы точек тела, hi – их расстояния от оси z, r
– массовая плотность, V – объём тела. Величина Iz является
мерой инертности тела при его вращении вокруг оси (см. Вращательное движение). Осевой M. и. можно также выразить через линейную величину rz,
наз. радиусом инерции относительно оси z, по ф-ле Iz = Mr2z,
где M – масса тела. Размерность M. и.-
Центробежными M. и. относительно системы прямоуг.
осей х, у, z, проведённых в точке О, наз. величины, определяемые
равенствами
или соответствующими объёмными интегралами. Эти
величины являются характеристиками динамич. неуравновешенности тела. Напр.,
при вращении тела вокруг оси z от значений Ixz и Iyz зависят силы давления на подшипники, в к-рых закреплена ось.
Эти
величины являются характеристиками динамич. неуравновешенности тела. Напр.,
при вращении тела вокруг оси z от значений Ixz и Iyz зависят силы давления на подшипники, в к-рых закреплена ось.
M. и. относительно параллельных осей z и z’ связаны
соотношением (теорема Гюйгенса)
где z’ – ось, проходящая через центр массы тела, d – расстояние между осями.
M. и. относительно любой проходящей через начало
координат О оси Ol с направляющими косинусами a, b,
g находится по ф-ле
Зная шесть величин Ix, Iy,
Iz, Ixy, Iyz, Izx, можно последовательно,
используя ф-лы (4) и (3), вычислить всю совокупность M. и. тела относительно
любых осей. Эти шесть величин определяют т. н. тензор инерции тела. Через каждую
точку тела можно провести 3 такие взаимно перпендикулярные оси, наз.
M. и. тел сложной конфигурации обычно определяют
экспериментально. Понятием о M. и. широко пользуются при решении мн. задач механики
и техники. Лит.: Гернет M. M., Ратобыльский В. Ф., Определение моментов
инерции, M., 1969; Фаворин M. В., Моменты инерции тел. Справочник, M., 1970;
см. также лит. при ст.
Предметный указатель >>
Центробежный момент инерции – это… Что такое Центробежный момент инерции?
Момент инерции — скалярная физическая величина, характеризующая распределение масс в теле, равная сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения СИ: кг·м².
Обозначение: I или J.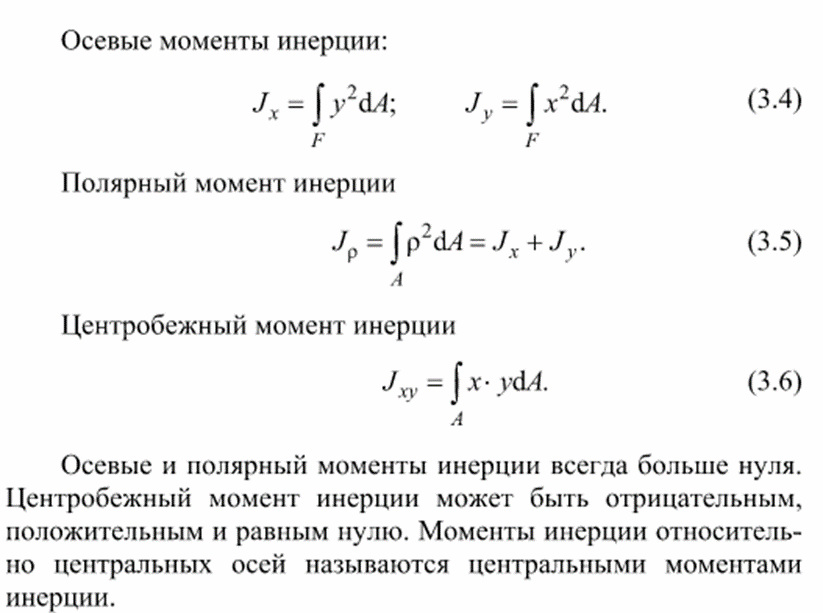
Различают несколько моментов инерции — в зависимости от многообразия, от которого отсчитывается расстояние точек.
Осевой момент инерции
Моментом инерции механической системы относительно неподвижной оси a («осевой момент инерции») называется физическая величина
,
где:
- mi — масса i-й точки,
- ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси a подобно тому, как масса тела является мерой его инертности в поступательном движении.
,
где:
- dm = ρdV — масса малого элемента объёма тела dV,
- ρ — плотность,
- r — расстояние от элемента

Если тело однородно, то есть его плотность всюду одинакова, то
Теорема Гюйгенса-Штейнера
Момент инерции данного тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела
Если — момент инерции тела относительно оси, проходящей через центр масс тела, то момент инерции относительно параллельной оси, расположенной на расстоянии от неё, равен
,
где — полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
Осевые моменты инерции некоторых тел
Центробежный момент инерции
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины:
где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm.
Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции тела.
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции.
Геометрический момент инерции
Геометрический момент инерции — геометрическая характеристика сечения, пропорциональная площади сечения и квадратно пропорциональная расстоянию до этого сечения. Геометрический момент инерции не связан с движением материала, он лишь отражает степень жесткости и взаимного расположения различных элементов конструкции.
Геометрический момент инерции двух стержней диаметром d на расстоянии L:
J = 2dL2
Центральный момент инерции
Центральный момент инерции (или момент инерции относительно точки O) — это величина
,
где:
- — масса малого элемента объёма тела dV,
- — плотность,
- — расстояние от элемента dV до точки O.
Центральный момент инерции можно выразить через главные осевые или центробежные моменты инерции: .
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором , можно представить в виде квадратичной (билинейной) формы :
- (1),
где — тензор инерции. Матрица тензора инерции симметрична, имеет размеры и состоит из компонент центробежных моментов:
- ,
Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора :
Для этого нужно решить задачу о собственных значениях для матрицы тензора :
Где, — ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины — главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:
- .
Откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на
и произведя замены:
- ,
получаем канонический вид уравнения эллипсоида в координатах :
Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой проходящей через центр эллипсоида и эту точку:
См. также
Литература
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.) http://www.alleng.ru/d/phys/phys108.htm
- Трофимова Т. И. Курс физики. — 7-е изд. — М.: Высшая школа, 2001. — 542 с.
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. Издательство Физического факультета МГУ, 1997. http://nature.web.ru/db/msg.html?mid=1186208&s=120000000
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с. http://www.alleng.ru/d/phys/phys99.htm
- Яворский Б. М., Детлаф А. А. Физика для школьников старших классов и поступающих в вузы: учебное пособие — М.: Дрофа, 2002, 800с. ISBN 5-7107-5956-3
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560 с. http://www.alleng.ru/d/phys/phys103.htm
 М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.) http://www.alleng.ru/d/phys/phys108.htm
М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.) http://www.alleng.ru/d/phys/phys108.htmСсылки
Wikimedia Foundation. 2010.
Момент инерции нагрузки и обратная ЭДС шагового двигателя
При выборе шагового двигателя первой характеристикой, на которую обращают внимание, является его выходной
крутящий
момент. Сразу как следствие возникает вопрос о скорости работы шагового двигателя, так как этот параметр
напрямую
связан с моментом. Технически подкованные пользователи следующим этапом принимают во внимание момент инерции
нагрузки,
приведенной к валу двигателя, так как инерционность нагрузки влияет и на требуемый момент, и на точность
позиционирования (вернее, на поведение двигателя при разгоне и торможении). Совсем немногие специалисты
знают о связи
момента инерции с вибрацией двигателя и резонансной частотой двигателя, и принимают во внимание этот аспект.
Однако,
почти никогда пользователи не учитывают, что инерционная нагрузка в некоторых случаях является причиной
выхода из
строя шаговых приводов и приводит к непредсказуемым последствиям в результате возникновения больших величин
ЭДС.
Сразу как следствие возникает вопрос о скорости работы шагового двигателя, так как этот параметр
напрямую
связан с моментом. Технически подкованные пользователи следующим этапом принимают во внимание момент инерции
нагрузки,
приведенной к валу двигателя, так как инерционность нагрузки влияет и на требуемый момент, и на точность
позиционирования (вернее, на поведение двигателя при разгоне и торможении). Совсем немногие специалисты
знают о связи
момента инерции с вибрацией двигателя и резонансной частотой двигателя, и принимают во внимание этот аспект.
Однако,
почти никогда пользователи не учитывают, что инерционная нагрузка в некоторых случаях является причиной
выхода из
строя шаговых приводов и приводит к непредсказуемым последствиям в результате возникновения больших величин
ЭДС.
Давайте вспомним, что такое инерционность нагрузки. Момент инерции – это характеристика объекта, которая
препятствует
изменению его угловой скорости. В случае разгона двигателя инерционность нагрузки создает дополнительный
момент
сопротивления, который привод должен преодолеть, и ограничивает максимальные значения скорости и ускорения,
при
которых шаговый двигатель будет работать. В случае замедления и остановки момент инерции мешает торможению
нагрузки.
Момент инерции – это характеристика объекта, которая
препятствует
изменению его угловой скорости. В случае разгона двигателя инерционность нагрузки создает дополнительный
момент
сопротивления, который привод должен преодолеть, и ограничивает максимальные значения скорости и ускорения,
при
которых шаговый двигатель будет работать. В случае замедления и остановки момент инерции мешает торможению
нагрузки.
Еще одна важная особенность работы любого электродвигателя – генерирование обратной электро-движущей силы.
Вспомним,
что по законам электродинамики на проводник с током, помещенный в магнитное поле, действует сила Ампера,
которая
создает крутящий момент. Верно и обратное – при движении проводника в магнитном поле в нем (проводнике)
возникает
электрический ток (генерируется ЭДС). Таким образом очевидно, что шаговый двигатель может работать и как
генератор. Однако, если работа двигателя в качестве генератора не
контролируется, это
свойство может приводить к негативным последствиям.
Однако, если работа двигателя в качестве генератора не
контролируется, это
свойство может приводить к негативным последствиям.
При запитанных фазах и корректной коммутации обмоток драйвером движение вала двигателя контролируется
блоком
управления. В случае внезапного отключения питания фаз двигателя (например, при срабатывании аварийного
датчика или
обрыве фазы) во время работы на высокой скорости момент инерции нагрузки вызывает дальнейшее вращение
ротора. В этот
момент вращающийся ротор работает как генератор, продуцируя некоторое значение обратной ЭДС. Чем выше
скорость
вращения и чем больше индуктивность фаз двигателя, тем выше это значение. В случае, когда инерционность
нагрузки
велика, а привод работает на больших скоростях, это значение обратной ЭДС может быть сравнимо или
превосходить
напряжение, подаваемое на двигатель при коммутации фаз. Это явление зачастую приводит к выходу из строя
силовой цепи
драйвера управления шаговым двигателем и порче оборудования.
Это явление зачастую приводит к выходу из строя
силовой цепи
драйвера управления шаговым двигателем и порче оборудования.
Так как из-за недостаточности исходных данных расчет обратной ЭДС обычно не делается, есть общая рекомендация по выбору шагового двигателя ля работы с инерционной нагрузкой: момент инерции нагрузки должен быть сопоставим с моментом инерции ротора двигателя. Рекомендуемые соотношения моментов инерции – 1:1…1:10. При больших величинах момента инерции могут возникать и проблемы с позиционированием, ухудшаются динамические характеристики системы, возникает опасность выхода системы из строя под воздействием больших величин обратной ЭДС.
Таким образом, мы хотим напомнить, что важнейшим параметром при подборе шагового двигателя является момент инерции нагрузки по нескольким причинам:
- Момент инерции нагрузки, приведенный к валу шагового двигателя, влияет на положение пиков резонанса на
кривой
зависимости момента от скорости.
- Инерционность нагрузки влияет на вибрацию и шум при работе шагового двигателя.
- Момент инерции нагрузки участвует в создании момента сопротивления при разгоне привода.
- В случае, если инерционность нагрузки слишком большая, может ухудшиться точность позиционирования в результате пропуска двигателем шагов.
- При чрезмерно инерционной нагрузке шаговый двигатель не сможет стартовать.
- Инерционная нагрузка приводит к возникновению обратной ЭДС, которая может вывести из строя блок управления и сопутствующее оборудование.

Момент инерции автомобиля: что это такое и с чем его едят? – Взгляд технаря – Блоги
Здравствуйте! Я рад приветствовать вас в своём новом блоге, в котором я по мере возможностей собираюсь рассказывать об интересных инженерно-технических аспектах спорта, прежде всего автоспорта, благо образование позволяет мне быть достаточно компетентным в этих вопросах (я окончил МГТУ им. Баумана по специальности «Автомобиле- и тракторостроение»). Какой-то регулярности в постах, скорее всего, не будет, писать буду по настроению и исходя из наличия времени. И, кстати, приглашаю всех к сотрудничеству. Вы можете написать с инженерной точки зрения, к примеру, о том, почему кривые палки в биатлоне лучше (или хуже?), как устроена машина для заливки льда в хоккее или по какой технологии производят футбольный мяч. Свои посты я постараюсь ориентировать на максимально широкий круг читателей, объясняя всё как можно более подробно и используя минимум формул.
Баумана по специальности «Автомобиле- и тракторостроение»). Какой-то регулярности в постах, скорее всего, не будет, писать буду по настроению и исходя из наличия времени. И, кстати, приглашаю всех к сотрудничеству. Вы можете написать с инженерной точки зрения, к примеру, о том, почему кривые палки в биатлоне лучше (или хуже?), как устроена машина для заливки льда в хоккее или по какой технологии производят футбольный мяч. Свои посты я постараюсь ориентировать на максимально широкий круг читателей, объясняя всё как можно более подробно и используя минимум формул.
Сегодня – дебютная запись, о моменте инерции автомобиля вокруг вертикальной оси.
Момент инерции тела – это мера инертности этого тела во вращательном движении, по аналогии с массой в поступательном движении. Помните второй закон Ньютона: Ускорение= Сила/Масса. Поэтому для достижения большего ускорения можно либо увеличивать силу (а форсировка двигателей в автоспорте обычно ограничена регламентами), либо снижать массу (что тоже, кстати, иногда ограничивают). Вот и во вращательном движении также: Угловое ускорение=Момент сил/Момент инерции.
Представьте себе автомобиль, которому надо войти в вираж. Для этого водителю необходимо совершить поворот автомобиля относительно центра поворота, находящегося обычно приблизительно на продолжении задней оси.
Я представляю себе поворачивающий автомобиль примерно так
Чем большей линейной скорости прохождения виража хочет добиться водитель, тем быстрее ему нужно заправлять автомобиль в поворот, т.е. увеличивать угловое ускорение автомобиля. По формуле с предыдущего абзаца видно, что для этого нужно либо увеличивать момент сил, которые заправляют автомобиль в поворот, либо снижать момент инерции. Однако беспредельно увеличивать момент сил не получится: он создаётся боковыми реакциями в пятнах контакта шин с дорогой и определяется сцепными свойствами резины с асфальтом. Опытный гонщик очень быстро найдёт предельную скорость и будет реализовывать максимально возможный момент сил для вкручивания автомобиля в поворот (при его превышении последует снос или занос). Таким образом, для того, чтобы выиграть при прохождении поворота ещё немного времени, следует бороться с моментом инерции автомобиля вокруг вертикальной оси.
Что же такое момент инерции автомобиля вокруг вертикальной оси, проходящей через центр масс? Если мысленно разбить автомобиль на элементарные массы, то сумма произведений этих элементарных масс на квадрат расстояния от них до вертикальной оси и даст нам момент инерции относительно этой оси. Отсюда выводятся два пути по снижению момента инерции: располагать все узлы и агрегаты как можно ближе к центру масс и бороться за снижение массы. Кстати, во втором пути регламент не будет помехой: можно снизить массу и ниже требований регламента, а требуемый минимум веса добрать размещением балласта прямо в центре масс. Если вы посмотрите ещё раз на приведённую формулу, то увидите, что от такого размещения балласта момент инерции не увеличивается: расстояние до центра масс – ноль!
Момент инерции является очень важной массовой характеристикой автомобиля, поэтому его определяют ещё на этапе компоновки, назначая габариты, положение и массы узлов и агрегатов.
При равных габаритах и массах агрегатов момент инерции вокруг вертикальной оси будет меньше у нижнего автомобиля
Напоследок два примера по снижению момента инерции из столь любимого мной WTCC:
1. Летом прошлого года Лада в качестве одного из обновлений поставила облегчённые фары вместо стандартных. Об этом говорили все, но, по сути, счёт сброшенному от этого технического решения весу шёл на десятки, максимум на сотни грамм. Другое дело – момент инерции: фары располагаются очень далеко от центра масс, поэтому даже небольшое снижение их веса значительней сказывается на снижении момента инерции, чем, к примеру, облегчение сидений или рулевого колеса.
2. В прошлом году Гранта с пилотом весила около 1120 кг (при оговорённом регламентом минимуме 1100 кг). Новая Веста похудела на 70 кг, а значит, лишние полсотни килограмм можно расположить, во-первых, как можно ниже (для снижения центра тяжести), а во-вторых, как можно ближе к центру масс (для снижения момента инерции). Конечно, регламентом WTCC оговорено место закрепления балласта (где-то в районе отсутствующего переднего пассажирского сиденья), однако небольшая вариабельность его размещения всё равно остаётся. Уверен, инженеры Лады воспользовались ей по максимуму.
На этом о моменте инерции всё. Если вам хочется почитать ещё о чём-нибудь интересном, оставляйте варианты в комментариях. Пока планирую в следующей статье порассуждать на тему, в какой же момент необходимо переключать передачи для достижения максимально эффективного разгона.
P.S. Вопрос совсем нереально суровым технарям: допустимо ли считать, что вертикальная ось автомобиля, проходящая через центр масс – это одна из трёх главных центральных осей автомобиля?
в чем измеряется, от чего зависит, как обозначается
Когда тело продолжает двигаться при отсутствии на него воздействия каких-либо сил, говорят о проявлении инерции. Именно ею объясняются трудности удержаться на ногах при резком торможении автобуса или усидеть в седле велосипеда, когда под колеса резко выбегает кот. Кроме инерции, проявляющейся при движении тел по прямой, аналогичное явление бывает при вращении вокруг оси. В таком случае в физике говорят о моменте инерции – скалярной величине, измеряющей инертность тела при осевом вращении.
Момент инерции и его физический смысл
Обеспечить поступательное движение предмета при его толкании будет тем тяжелее, чем больше он весит. Аналогичные эксперименты предусматривались школьной программой и относились к прямо направленному действию.
Источник: encrypted-tbn0.gstatic.comБыло понятно, что именно масса тела характеризует степень его инертности и является ее мерой.
При совершении предметом вращательных движений наблюдается иной вид зависимости. В данном случае мерой инертности выступает момент инерции.
Момент инерции – скалярная измеряемая характеристика инертности тела в момент совершения осевого вращения.
Задачи по определению величины момента инерции решаются с помощью теоремы Гюйгенса-Штейнера, смысл которой заключается в следующем:
МИ для тела, вращающегося вокруг какой-либо оси, равна сумме слагаемых единиц: момент инерции предмета, который вращается вокруг оси, параллельной данной, и проходящей через центр масс, а также произведения массы на расстояние между осями, возведенное в квадрат.
Источник: theslide.ruВ приведенной формуле используются следующие обозначения: d – расстояние между осями, m – масса тела, Iz – момент инерции относительно рассматриваемой оси, а Ic – относительно оси, которая проходит через центр масс. В профильной литературе и учебниках буква I может заменяться J.
Формулировка способа количественного измерения момента инерции при осевом вращении предмета стала возможной в результате работы двух ученых-математиков: Гюйгенса и Штейнера. Теорема дает возможность быстрого решения задач на определение инерции предмета любой формы, для которого уже просчитана центробежная сила. Формула Штейнера позволяет вычислить момент инерции этого предмета относительно выбранной оси, проходящей параллельно прямой, следующей через центр фигуры.
Единицы измерения в системе СИ
Единицей измерения момента инерции, принятой в системе СИ, является кг, умноженный на метр в квадрате – кг·м². В еще одной системе измерения (СГС) единицей измерения является грамм на квадратный сантиметр – г·см².
Как рассчитать момент инерции, формула
Измерение значения момента инерции можно произвести теоретически, согласно формуле. Для этого условно движущийся предмет разбивается на мелкие составляющие, масса которых обозначается dm. В конечном итоге момент инерции (МИ) равняется сумме произведений всех образовавшихся масс на расстояние до оси, возведенное в квадрат.
Источник: works.doklad.ruИсходя из этой формулы, момент инерции, кроме массы тела, определяется положением оси, вокруг которой предмет вращается, а также его формой и габаритами.
Возможность рассчитать моменты инерции полезна, к примеру, при исследованиях свойств и структуры элементов Солнечной системы. Это так называемый безразмерный момент инерции. Высчитанная по формуле величина дает представление о распределении массы по глубине.
Виды моментов инерции
Кроме безразмерного момента инерции, в физике существуют понятия:
- центробежный МИ;
- главный МИ;
- геометрический МИ;
- МИ относительно плоскости;
- центральный МИ;
- тензор инерции;
- эллипсоид инерции.
Центробежными МИ относительно прямоугольных осей координат (декартовой системы) считаются Jxy, Jxz, Jyz. Ось ОХ является главной, когда центробежные моменты инерций Jxy и Jxz равняются нулям.
Любая точка тела может являться центром трех главных осей инерции. Они характеризуются взаимной перпендикулярностью. МИ относительно них считается главным для данного предмета. Главные оси, которые пролегают через центр масс, – являются главными центральными осями инерции предмета. МИ относительно них – главные центральные МИ. Для однородного тела ось симметрии всегда является главной центральной осью инерции.
Для геометрических МИ существуют формулы, основывающиеся на объеме относительно оси и площади относительно оси.
Твердое тело может иметь МИ относительно плоскости. Тогда это – скалярная величина, которая рассчитывается суммированием произведений массы каждой точки предмета и расстояния от нее до плоскости, возведенного в квадрат.
Понятие «Центрального МИ» связано с точкой О, МИ относительно полюса либо полярным МИ.
Момент инерции тела относительно оси вращения
МИ служит единицей измерения инерции тела, которое вращается вокруг оси, подобно тому, как масса является мерой при поступательном движении.
Определить МИ предметов касательно оси вращения позволяет формула Штейнера.
Пример:
Наглядное подтверждение применения формулы Штейнера – расчет МИ стержня, ось вращения которого проходит через конец.
Моменты инерции простейших объектов
Момент инерции некоторых однородных тел, имеющих простую форму, в зависимости от характеристик осей вращения можно определить по следующим формулам:
- МИ точечного предмета либо полого цилиндра с тонкими стенками (с массой m и радиусом r) = mr2
- МИ диска или сплошного цилиндра = 1/2 mr2
- МИ цилиндра с толстыми стенками, у которого внешний радиус обозначен r2, а внутренний – r1, : В указанных случаях ось вращения является осью цилиндра.
- МИ сплошного цилиндра с осью вращения, перпендикулярной образующей цилиндра, расположенной по центру масс:
- МИ полого цилиндра с тонкими стенками и осью, перпендикулярной к цилиндру и проходящей через центр масс:
- МИ прямого тонкого стержня с осью, перпендикулярной к нему и проходящей через центр масс:
- МИ сферы с тонкими стенками и осью по центру = 2/3 mr2
- МИ шара с осью по центру = 2/5 mr2
- МИ равнобедренного треугольника с осью, перпендикулярной его плоскости и проходящей через вершину:
Примеры решения задач
Применение на практике приведенных формул происходит, например, для решения следующих задач.
Пример №1
Задано найти МИ однородного диска с известными массой и радиусом. Из дополнительных сведений: ось вращения – через центр диска.
Для решения диск разбивается на тонкие кольца, радиусы которых равняются от 0 до R. Взяв одно из них и обозначив его радиус буквой \(r\), а массу – \(dm\), формула для расчета МИ (согласно теореме Гюйгенса-Штейнера) выглядит следующим образом: \(dJ=dmr2.\)
С учетом подстановки в конечную формулу для определения МИ формулы для массы кольца получаем:
Пример № 2
Задано найти у того же диска МИ относительно оси, которая проходит через середину радиуса.
Из предшествующего задания используем найденную величину МИ относительно оси, которая проходит через центр масс. Используя формулу Штейнера, решаем задачу.
Если решать аналогичные задачи нет желания или времени, а контрольную работу нужно сдать в срок, на помощь придут сотрудники Феникс.Хелп.
момент инерции | Определение, уравнение, единицы измерения и факты
Момент инерции , в физике, количественная мера инерции вращения тела, т. Е. Сопротивление, которое тело демонстрирует изменению скорости вращения вокруг оси приложением. крутящего момента (крутящего момента). Ось может быть внутренней или внешней и может быть или не быть фиксированной. Момент инерции ( I ), однако, всегда указывается относительно этой оси и определяется как сумма произведений, полученных путем умножения массы каждой частицы вещества в данном теле на квадрат расстояния до нее. ось.При вычислении момента количества движения твердого тела момент инерции аналогичен массе в импульсе. Для количества движения импульс p равен массе m, в раз превышающей скорость v ; тогда как для углового момента угловой момент L равен моменту инерции I , умноженному на угловую скорость ω.
На рисунке показаны два стальных шарика, приваренных к стержню AB , который прикреплен к стержню OQ при C .Пренебрегая массой AB и предполагая, что все частицы массой м каждого шара сосредоточены на расстоянии r от OQ , момент инерции определяется как I = 2 mr 2 .
Encyclopædia Britannica, Inc.Момент инерции является составной единицей измерения. В Международной системе (СИ) м выражается в килограммах и r в метрах, причем I (момент инерции) имеет размерность килограмм-метр квадрат.В общепринятой системе США м выражается в образцах (1 пуля = 32,2 фунта) и r в футах, при этом I выражается в единицах квадратного метра на фут.
Момент инерции любого тела, форма которого может быть описана математической формулой, обычно вычисляется с помощью интегрального исчисления. Момент инерции диска на рисунке около OQ можно аппроксимировать, разрезав его на несколько тонких концентрических колец, найдя их массы, умножив массы на квадраты их расстояний от OQ и сложив их. продукты.При использовании интегрального исчисления процесс суммирования выполняется автоматически; ответ: I = ( mR 2 ) / 2. (См. Механику; крутящий момент.)
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасДля тела математически неописуемой формы момент инерции может быть получен экспериментально. В одной из экспериментальных процедур используется связь между периодом (временем) колебания торсионного маятника и моментом инерции подвешенной массы.Если диск на рисунке подвешен на тросе OC , закрепленном на O , он будет колебаться примерно на OC , если его скрутить и отпустить. Время одного полного колебания будет зависеть от жесткости проволоки и момента инерции диска; чем больше инерция, тем больше время.
Моменты инерции – обзор
§ 51. Многоатомные газы
Свободная энергия многоатомного газа, как и энергия двухатомного газа, может быть записана как сумма поступательной, вращательной и колебательной частей.Поступательная часть по-прежнему характеризуется значениями теплоемкости и химической постоянной
(51,1) ctr = 32, ζtr = 32log (m / 2πℏ2).
Из-за больших моментов инерции многоатомных молекул (и соответствующей малости их вращательных квантов) их вращение всегда можно трактовать классически. † Многоатомная молекула имеет три степени свободы вращения и три главных момента инерции I 1 , I 2 , I 3 , которые в целом различны; поэтому его кинетическая энергия вращения равна
(51.2) εrot = Mξ22I1 + Mη22I2 + Mζ22I3,
где ξ, η, ζ – координаты во вращающейся системе, оси которой совпадают с главными осями инерции молекулы; пока мы не будем рассматривать частный случай молекул, состоящих из коллинеарных атомов. Это выражение необходимо подставить в статистическую сумму
(51.3) Zrot = ∫′e − εrot / Tdτrot,
, где
dτrot = 1 (2πℏ) 3dMξdMηdMζdϕξdϕηdϕζ,
, а штрих, как обычно, означает, что интегрирование должно производиться только по физически различным ориентациям молекулы.
Если молекула имеет оси симметрии, вращения вокруг этих осей оставляют молекулу неизменной и сводятся к обмену идентичными атомами. Понятно, что количество физически неразличимых ориентаций молекулы равно количеству возможных различных поворотов вокруг осей симметрии, включая поворот на 360 ° (тождественное преобразование). Обозначив это число † через σ, мы можем взять интегрирование в (51.3) просто по всем ориентациям и разделить на σ.
В продукте d ϕ ξ d ϕ η d ϕ ζ трех бесконечно малых углов поворота, d ϕ ξ d ϕ η можно рассматривать как элемент телесного угла d o ζ для направлений оси ζ. Интегрирование по o ζ не зависит от интегрирования по вращениям d ϕ ζ вокруг оси ζ и дает 4π. Интегрирование по ϕ ζ дает еще 2π.Интегрируя также более M ξ , M η , M ζ от –∞ до ∞, в итоге получаем
Zrot = 8π2σ (2πℏ) 3 (2πT) 3/2 (I1I2I3) 1/2 = (2T) 3/2 (πI1I2I3) 1/2 / σℏ3.
Следовательно, свободная энергия равна
(51,4) F = −32NTlogT − NTlog (8πI1I2I3) 1 / 2σℏ3.
Таким образом, для удельной теплоемкости вращения в соответствии с § 44 мы имеем
(51,5) crot = 32,
, а химическая постоянная равна
(51,6) ζrot = log (8πI1I2I3) 1 / 2σℏ3.
Для линейной молекулы , то есть такой, в которой все атомы коллинеарны, есть, как и в двухатомной молекуле, только две вращательные степени свободы и один момент инерции I . Удельная теплоемкость вращения и химическая постоянная, как и в двухатомном газе, равны
(51,7) crot = 1, ζrot = log (2I / σℏ2),
, где σ = 1 для асимметричной молекулы (такой как NNO) и σ = 2 для молекулы, симметричной относительно ее средней точки (такой как ОСО).
Колебательная часть свободной энергии многоатомного газа вычисляется аналогично тому, как это было для двухатомного газа, приведенному выше.Единственное отличие состоит в том, что многоатомная молекула имеет не одну, а несколько колебательных степеней свободы: нелинейная молекула из n атомов явно имеет r виб = 3 n –6 колебательных степеней свободы, в то время как для линейная молекула из n атомов r виб = 3 n –5 (см. § 44). Число колебательных степеней свободы определяет количество нормальных мод колебаний молекулы, каждой из которых соответствует частота ω α (суффикс α, обозначающий нормальные моды).Следует помнить, что некоторые из частот ω α могут быть равными, и в этом случае рассматриваемая частота называется вырожденной .
В гармоническом приближении, где колебания предполагаются малыми (будут рассматриваться только температуры, для которых это так), все нормальные моды независимы, а энергия колебаний является суммой энергий отдельных мод. Таким образом, колебательная статистическая сумма представляет собой произведение статистических сумм отдельных мод, а свободная энергия F vib является суммой выражений типа (49.1):
(51,8) Fvib = NT∑αlog (1 − e − ℏωα / T).
Каждая частота появляется в этой сумме количество раз, равное ее вырождению. Аналогичные суммы получены для колебательных частей других термодинамических величин.
Каждый из нормальных режимов дает в своем собственном классическом пределе ( T ħω α ) вклад cvib (α) = 1 в удельную теплоемкость; для T больше наибольшего ħω α мы должны получить
(51.9) cvib = rvib.
Однако на практике этот предел не достигается, поскольку многоатомные молекулы обычно разлагаются при значительно более низких температурах.
Различные частоты ω α для многоатомной молекулы обычно находятся в очень широком интервале. По мере повышения температуры различные нормальные режимы последовательно вносят вклад в удельную теплоемкость. Вследствие этого удельную теплоемкость многоатомных газов можно часто считать приблизительно постоянной в довольно широких интервалах температур.
Мы можем упомянуть возможность любопытного перехода от вибрации к вращению, примером которого является молекула этана C 2 H 6 . Эта молекула состоит из двух групп CH 3 , расположенных на определенном расстоянии друг от друга и определенным образом ориентированных друг к другу. Одно из нормальных колебаний молекулы – это «крутильное» колебание, при котором одна из групп CH 3 закручена относительно другой. По мере увеличения энергии колебаний увеличивается их амплитуда и, в конечном итоге, при достаточно высоких температурах колебание превращается в свободное вращение.Вклад этой степени свободы в удельную теплоемкость, которая составляет приблизительно 1, когда колебания полностью возбуждены, поэтому начинает уменьшаться при дальнейшем повышении температуры, асимптотически приближаясь к значению 12, типичному для вращения.
Наконец, можно упомянуть, что если молекула имеет ненулевой спин S (например, молекулы NO 2 и ClO 2 ), химическая константа включает член
(51.10) ζS = журнал (2S + 1).
ПРОБЛЕМА
Определите вращательную статистическую сумму для метана при низких температурах.
РЕШЕНИЕ
Как уже упоминалось в первом примечании к этому разделу, квантовый расчет Z rot для метана требуется при достаточно низких температурах.
Молекула CH 4 является тетраэдром типа сферической вершины, поэтому ее уровни вращения составляют are 2 J ( J + 1) / 2 I , где I – общее значение трех главных моментов инерции, а Дж – квантовое число вращения.Поскольку спин i ядра H равен 12, а спин ядра C 12 равен нулю, полный ядерный спин молекулы CH 4 может быть равен 0, 1 или 2, при этом соответствующие ядерные статистические веса равны 1, 3 или 5; см. Quantum Mechanics , § 105, Problem 5. Для любого заданного значения J существует определенное количество состояний, соответствующих значениям полного ядерного спина. В следующей таблице приведены эти числа для первых пяти значений Дж .
| Ядерное вращение | 0 | 1 | 2 | |
| J = 0 | – | – | 1 | |
| 1 | ||||
| 2 | 2 | 1 | – | |
| 3 | – | 2 | 1 | |
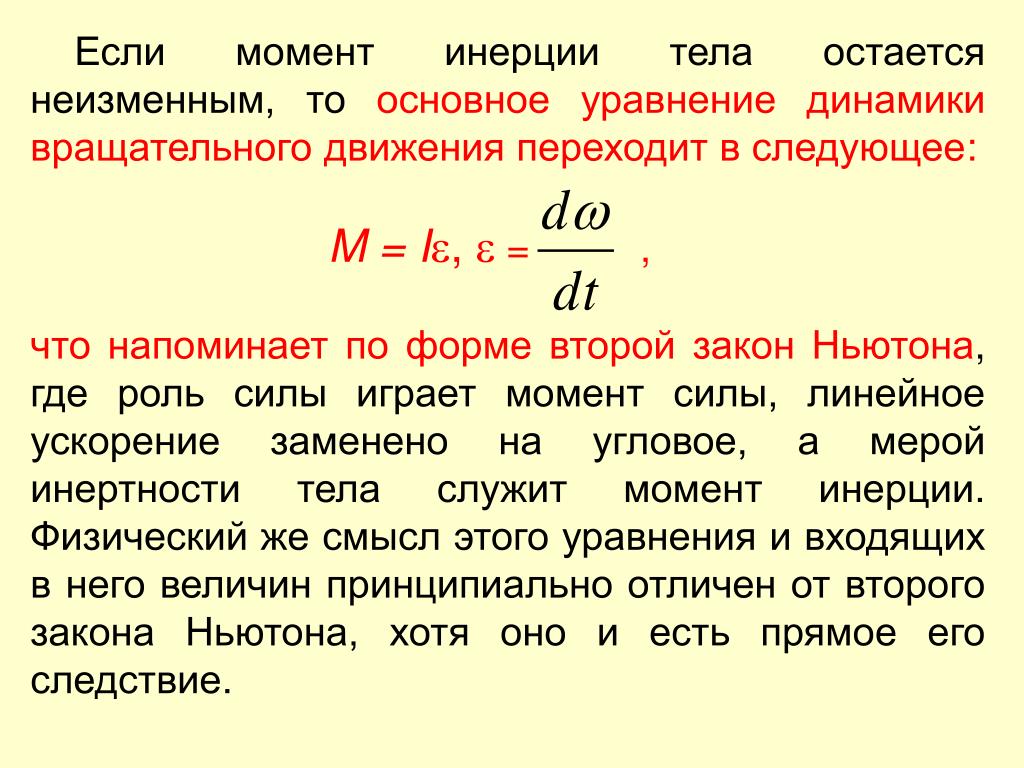
| 4 | 2 | 2 | 9 сумма Z rot , который получается с учетом общей степени вырождения относительно ориентации углового момента вращения и ядерного спина, необходимо разделить на 16, если энтропия должна измеряться по значению log (2 i + 1) 4 = журнал 16 (ср.первую сноску к § 48). Результат: Zrot = 516 + 916e − ℏ2 / IT + 2516e − 3ℏ2 / IT + 7716e − 6ℏ2 / IT + 11716e − 10ℏ2 / IT +…. Что такое момент инерции в физике?Момент инерции объекта – это расчетная мера для твердого тела, которое совершает вращательное движение вокруг фиксированной оси: то есть, он измеряет, насколько сложно было бы изменить текущую скорость вращения объекта. Это измерение рассчитывается на основе распределения массы внутри объекта и положения оси, что означает, что один и тот же объект может иметь очень разные значения момента инерции в зависимости от местоположения и ориентации оси вращения. Концептуально момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости, аналогично тому, как масса представляет сопротивление изменению скорости при невращающем движении в соответствии с законами движения Ньютона. Расчет момента инерции определяет силу, необходимую для замедления, ускорения или остановки вращения объекта. В Международной системе единиц (единица СИ) момент инерции равен одному килограмму на квадратный метр (кг-м 2 ).В уравнениях он обычно представлен переменной I или I P (как в показанном уравнении). Простые примеры момента инерцииНасколько сложно повернуть конкретный объект (перемещать его по кругу относительно точки поворота)? Ответ зависит от формы объекта и от того, где сосредоточена масса объекта. Так, например, величина инерции (сопротивления изменению) довольно мала в колесе с осью посередине.Вся масса равномерно распределена вокруг точки поворота, поэтому небольшой крутящий момент на колесе в правильном направлении заставит его изменить свою скорость. Однако это намного сложнее, и измеренный момент инерции будет больше, если вы попытаетесь перевернуть то же колесо против его оси или повернуть телефонный столб. Использование момента инерцииМомент инерции объекта, вращающегося вокруг неподвижного объекта, полезен при вычислении двух ключевых величин во вращательном движении: Вы можете заметить, что приведенные выше уравнения очень похожи на формулы для линейной кинетической энергии и количества движения, с моментом инерции « I» вместо массы « м» и угловой скоростью « ω» вместо скорости “ v “, что еще раз демонстрирует сходство между различными концепциями вращательного движения и в более традиционных случаях линейного движения. Расчет момента инерцииНа рисунке на этой странице показано уравнение расчета момента инерции в самом общем виде. В основном он состоит из следующих шагов:
Для очень простого объекта с четко определенным количеством частиц (или компонентов, которые могут быть обработаны как частицы), можно просто выполнить вычисление этого значения методом перебора, как описано выше.В действительности, однако, большинство объектов настолько сложны, что это практически невозможно (хотя некоторые умные компьютерные коды могут сделать метод грубой силы довольно простым). Вместо этого существует множество методов расчета момента инерции, которые особенно полезны. Ряд обычных объектов, таких как вращающиеся цилиндры или сферы, имеют очень четко определенные формулы момента инерции. Существуют математические средства решения проблемы и расчета момента инерции для тех объектов, которые более необычны и нерегулярны и, следовательно, представляют большую проблему. Момент инерцииМомент инерции системы Частицы Первый закон движения Ньютона гласит: «Тело поддерживает ток состояние движения, если на него не действует внешняя сила ». Мера инерции при поступательном движении масса системы и ее угловой аналогом является так называемый момент инерции .Момент инерции тела не связано только с его массой, но также и с распределением массы по всему телу. Итак, два тела одинаковой массы могут обладать разными моментами инерции. Твердое тело можно рассматривать как систему частиц, в которой взаимное расположение частиц не меняется. Момент инерции одиночного частица ( I ) может быть выражена как
, где м = масса частицы, а r = кратчайшее расстояние от оси вращения до частицы (рис. 1).
Как показано в [1], момент инерции равен равна массе, умноженной на квадрат расстояния, и также обозначается как второй массовый момент . Массу, умноженную на расстояние, м r , называется первым моментом массы . Эта концепция первого массового момента такова: обычно используется для определения центра масс системы частиц или твердого тела. См. Центр масс-система частиц для подробности. Расширение [1] для системы частиц:
Верх Момент инерции жесткого тела Исходя из [2], можно получить момент инерции жесткого диска, показанного на рисунке 2:
, где r i = положение частица i и n = единичный вектор оси вращения.Обратите внимание, что ось вращения проходит через локальную систему отсчета, OXYZ . система. Пусть
и
, где cos a , cos b & cos g = три направляющих косинуса вектора n в систему XYZ . Подстановка [4] и [5] в [3] приводит к
где
I xx , I yy и I zz называются моментами инерции , а I xy , I yx , I yz , I zy , I zx , и I xz произведения инерции .Для твердого тела относительное положение частицы не изменяются, и можно записать [7] как:
Когда форма и распределение плотности твердого тела точно известно, можно использовать [8] для вычисления моментов и продукты инерции. (См. Уравнения BSP для MOI уравнения типичных геометрических форм, обычно используемых при моделировании человеческого тела.) В противном случае их сложно вычислить путем интеграции.Скорее, момент инерцию необходимо измерять непосредственно от объекта. См. Раздел Измерение MOI. для подробностей. Верх
Эллипсоид инерции Моменты и произведения инерции, показанные в [7] и [8] в основном относятся к локальной системе отсчета определены и отражают распределение массы внутри тела по отношению к локальному система отсчета. Как показано в [6], реальный момент инерция твердого тела относительно оси вращения зависит не только от моментов и произведения инерции для данной системы отсчета, а также ориентацию оси вращения, a , b и g .Таким образом, правильнее было бы сказать, что момент инерции твердое тело отражает распределение массы внутри тела относительно оси вращение. При изменении оси вращения изменяется момент инерции. К ясно покажите этот момент, пусть
Подставляя [9] в [6], получаем
Интересно, что [10] достаточно общая форма эллипсоида с центром в начале координат система отсчета.Когда I xy = I yz = I zx = 0, эллипсоид, определенный в [10], однозначно принимает вид симметрично относительно трех осей. С
расстояние от центра эллипсоида до поверхности равно 1 деленное на квадратный корень из момента инерции твердого тела для данного ориентация, a , b и g .Эллипсоид, определенный в [10], называется эллипсоид инерции , поскольку он описывает момент инерции объекта как функция ориентации оси вращения. Верх Моментов инерции и матрица инерцииМомент инерцииМомент инерции – вращательный аналог массы. Массовый момент инерция относительно фиксированной оси – это свойство тела, которое измеряет сопротивление тела ускорению вращения.Чем больше его значение, тем больше момент, необходимый для обеспечения заданного ускорения около фиксированный стержень. Момент
инерции следует указывать относительно
выбранная ось вращения. Часто используются символы Ixx, Iyy и Izz. выразить моменты инерции трехмерного твердого тела около его три оси. (A) Продукты из Инерция задано Ixy, Ixz и Iyz, где(B) Инерция МатрицаМомент импульса может быть выражается как(C) (см. PDF для объяснения того, как это получается) Где Матрица инерции Проблемы где вектор момента импульса, час параллельно легче решить, поэтому момент количества движения может быть выражен как Если это выражение для подставляется в уравнение (С) тогда получается следующее выражение. Это может быть рассматривается как проблема собственных значений, три собственные значения из определить ось, вокруг которой тело может вращаться, сохраняя h параллельно Три собственных значения: принцип моменты инерции и известны как A B и C Три собственных вектора являются главной осью инерции
и ортогональны. Следовательно оси, согласованные с принципом, полезны при решении практичный задачи Моменты инерции гироскопаГироскоп – осесимметричный корпус Должное к осесимметрия гироскопа по всей оси в i-j самолет принцип.Гироскоп можно рассматривать как корпус AAC . Это имеет основные моменты инерции A A и C 10.5 Расчет моментов инерции – University Physics Volume 1В предыдущем разделе мы определили момент инерции, но не показали, как его вычислить. В этом разделе мы покажем, как рассчитать момент инерции для нескольких стандартных типов объектов, а также как использовать известные моменты инерции, чтобы найти момент инерции для смещенной оси или для составного объекта.Этот раздел очень полезен, чтобы увидеть, как применить общее уравнение к сложным объектам (навык, который имеет решающее значение для более продвинутых курсов физики и инженерии). Момент инерцииМы определили момент инерции I объекта как I = ∑imiri2I = imiri2 для всех точечных масс, составляющих объект. Поскольку r – это расстояние до оси вращения от каждой части массы, составляющей объект, момент инерции для любого объекта зависит от выбранной оси.Чтобы убедиться в этом, возьмем простой пример двух масс на конце безмассового (пренебрежимо малая масса) стержня (рис. 10.23) и вычислим момент инерции относительно двух разных осей. В этом случае суммирование по массам является простым, потому что две массы на конце штанги могут быть аппроксимированы как точечные массы, и поэтому в сумме есть только два члена. В случае с осью в центре штанги каждая из двух масс м находится на расстоянии R от оси, что дает момент инерции I1 = mR2 + mR2 = 2mR2.I1 = mR2 + mR2 = 2mR2.В случае с осью на конце штанги, проходящей через одну из масс, момент инерции равен I2 = m (0) 2 + m (2R) 2 = 4mR2. I2 = m (0) 2 + m (2R) 2 = 4mR2.Из этого результата можно сделать вывод, что вращать штангу вокруг конца в два раза сложнее, чем вокруг ее центра. Рис. 10.23 (а) Штанга с осью вращения, проходящей через ее центр; (б) штанга с осью вращения, проходящей через один конец. В этом примере у нас было две точечные массы, и сумму было просто вычислить.Однако, чтобы иметь дело с объектами, которые не являются точечными, нам нужно тщательно продумать каждый член уравнения. Уравнение требует, чтобы мы суммировали каждый «кусок массы» на определенном расстоянии от оси вращения. Но что именно означает каждый «кусок массы»? Напомним, что при выводе этого уравнения каждая часть массы имела одинаковую величину скорости, что означает, что вся часть должна находиться на одном расстоянии r от оси вращения. Однако это невозможно, если мы не возьмем бесконечно малый кусок массой дм , как показано на рисунке 10.24. Рис. 10.24. Использование бесконечно малой массы для вычисления вклада в общий момент инерции. Необходимость использовать бесконечно малый кусок массы дм предполагает, что мы можем записать момент инерции, вычисляя интеграл по бесконечно малым массам, а не производя дискретную сумму по конечным массам: I = imiri2becomesI = ∫r2dm.I = ∑imiri2becomesI = r2dm.10,19 Фактически, это та форма, которая нам нужна для обобщения уравнения для сложных форм.Лучше всего подробно проработать конкретные примеры, чтобы понять, как рассчитать момент инерции для конкретных форм. Этому посвящена большая часть остальной части этого раздела. Однородный тонкий стержень с осью через центрРассмотрим однородный (по плотности и форме) тонкий стержень массой M и длиной L , как показано на рисунке 10.25. Нам нужен тонкий стержень, чтобы можно было предположить, что площадь поперечного сечения стержня мала и стержень можно представить как набор масс вдоль одномерной прямой.В этом примере ось вращения перпендикулярна стержню и для простоты проходит через среднюю точку. Наша задача – вычислить момент инерции относительно этой оси. Ориентируем оси так, чтобы ось z была осью вращения, а ось x проходила по длине стержня, как показано на рисунке. Это удобный выбор, потому что затем мы можем интегрировать по оси x . Рисунок 10.25 Расчет момента инерции I для однородного тонкого стержня вокруг оси, проходящей через центр стержня. Мы определяем дм как небольшой элемент массы, составляющий стержень. Интеграл момента инерции является интегралом по распределению масс. Однако мы знаем, как интегрироваться по пространству, а не по массе. Поэтому нам нужно найти способ связать массу с пространственными переменными. Мы делаем это, используя линейную плотность массы объекта λλ, которая является массой на единицу длины. Поскольку массовая плотность этого объекта однородна, мы можем написать λ = mlorm = λl. λ = mlorm = λl.Если мы возьмем дифференциал каждой части этого уравнения, мы найдем dm = d (λl) = λ (dl) dm = d (λl) = λ (dl), поскольку λλ постоянно.Для удобства мы решили сориентировать штангу по оси x – именно здесь такой выбор становится очень полезным. Обратите внимание, что кусок стержня dl полностью лежит вдоль оси x и имеет длину dx ; фактически, в этой ситуации dl = dxdl = dx. Следовательно, мы можем написать dm = λ (dx) dm = λ (dx), что даст нам переменную интегрирования, с которой мы знаем, что делать. Расстояние каждого куска массой дм от оси задается переменной x , как показано на рисунке.Собирая все вместе, получаем I = ∫r2dm = ∫x2dm = ∫x2λdx.I = ∫r2dm = ∫x2dm = ∫x2λdx.Последний шаг – быть осторожным с нашими пределами интеграции. Стержень простирается от x = −L / 2x = −L / 2 до x = L / 2x = L / 2, поскольку ось находится в середине стержня в точке x = 0x = 0. Это дает нам I = ∫ − L / 2L / 2×2λdx = λx33 | −L / 2L / 2 = λ (13) [(L2) 3 – (- L2) 3] = λ (13) L38 (2) = ML (13) L38 (2) = 112ML2.I = ∫ − L / 2L / 2×2λdx = λx33 | −L / 2L / 2 = λ (13) [(L2) 3 – (- L2) 3] = λ (13) L38 (2) = ML (13) L38 (2) = 112ML2.Затем мы вычисляем момент инерции для того же однородного тонкого стержня, но с другим выбором оси, чтобы мы могли сравнить результаты.Мы ожидаем, что момент инерции будет меньше относительно оси, проходящей через центр масс, чем ось конечной точки, как это было в примере со штангой в начале этого раздела. Это происходит потому, что больше массы распределяется дальше от оси вращения. Однородный тонкий стержень с осью на концеТеперь рассмотрим тот же однородный тонкий стержень массой M и длиной L , но на этот раз переместим ось вращения на конец стержня. Мы хотим найти момент инерции относительно этой новой оси (рисунок 10.26). Количество дм снова определяется как небольшой элемент массы, составляющий стержень. Как и раньше, получаем I = ∫r2dm = ∫x2dm = ∫x2λdx.I = ∫r2dm = ∫x2dm = ∫x2λdx.Однако на этот раз у нас другие пределы интеграции. Стержень простирается от x = 0x = 0 до x = Lx = L, так как ось находится на конце стержня в точке x = 0x = 0. Следовательно, мы находим I = ∫0Lx2λdx = λx33 | 0L = λ (13) [(L) 3− (0) 3] = λ (13) L3 = ML (13) L3 = 13ML2.I = ∫0Lx2λdx = λx33 | 0L = λ ( 13) [(L) 3− (0) 3] = λ (13) L3 = ML (13) L3 = 13ML2.Рисунок 10.26 Расчет момента инерции I для однородного тонкого стержня вокруг оси, проходящей через конец стержня. Обратите внимание, что инерция вращения стержня вокруг его конца больше, чем инерция вращения относительно его центра (в соответствии с примером со штангой) в четыре раза. Теорема о параллельных осяхСходство между процессом определения момента инерции стержня вокруг оси, проходящей через его середину, и вокруг оси, проходящей через его конец, поразительно, и предполагает, что может существовать более простой метод определения момента инерции стержня, проходящего через его середину. любая ось параллельна оси, проходящей через центр масс.Такая ось называется параллельной осью. Для этого есть теорема, называемая теоремой о параллельных осях, которую мы формулируем здесь, но не выводим в этом тексте. Теорема о параллельной осиПусть m будет массой объекта и пусть d будет расстоянием от оси, проходящей через центр масс объекта, до новой оси. Тогда у нас есть Параллельная ось = центр массы + md2. Параллельная ось = центр массы + md2.10,20 Давайте применим это к примерам стержней, решенным выше: Iend = Центр массы + md2 = 112mL2 + m (L2) 2 = (112 + 14) mL2 = 13mL2.Iend = Центр массы + md2 = 112mL2 + m (L2) 2 = (112 + 14) mL2 = 13mL2.Этот результат согласуется с нашим более длинным вычислением, приведенным выше. Это полезное уравнение, которое мы применяем в некоторых примерах и задачах. Проверьте свое понимание 10,5 Каков момент инерции цилиндра с радиусом R и массой м относительно оси, проходящей через точку на поверхности, как показано ниже? Единый тонкий диск вокруг оси через центрИнтегрирование для определения момента инерции двумерного объекта немного сложнее, но на этом уровне исследования обычно делается одна форма – однородный тонкий диск вокруг оси, проходящей через его центр (рис.27). Рис. 10.27. Вычисление момента инерции тонкого диска вокруг оси, проходящей через его центр. Поскольку диск тонкий, мы можем считать массу распределенной целиком в плоскости xy . Мы снова начнем с соотношения для поверхностной плотности массы, которая представляет собой массу на единицу площади поверхности. Поскольку он однороден, поверхностная плотность массы σσ постоянна: σ = mA или σA = m, sodm = σ (dA). σ = mA или σA = m, sodm = σ (dA).Теперь мы используем упрощение для области.Область можно представить как состоящую из серии тонких колец, где каждое кольцо представляет собой приращение массы дм с радиусом r , равноудаленным от оси, как показано в части (b) рисунка. Бесконечно малая площадь каждого кольца dA , таким образом, определяется длиной каждого кольца (2πr2πr), умноженной на бесконечно малую ширину каждого кольца dr : A = πr2, dA = d (πr2) = πdr2 = 2πrdr.A = πr2, dA = d (πr2) = πdr2 = 2πrdr.Полная площадь диска складывается из всех тонких колец с радиусом от 0 до R .Затем этот диапазон радиусов становится нашими пределами интегрирования для dr , то есть мы интегрируем от r = 0r = 0 до r = Rr = R. Собирая все вместе, получаем I = ∫0Rr2σ (2πr) dr = 2πσ∫0Rr3dr = 2πσr44 | 0R = 2πσ (R44−0) = 2πmA (R44) = 2πmπR2 (R44) = 12mR2. | 0R = 2πσ (R44−0) = 2πmA (R44) = 2πmπR2 (R44) = 12mR2.Обратите внимание, что это соответствует значению, приведенному на рисунке 10.20. Расчет момента инерции составных объектовТеперь рассмотрим составной объект, такой как на рисунке 10.28, на котором изображен тонкий диск на конце тонкого стержня. Это не может быть легко интегрировано, чтобы найти момент инерции, потому что это объект неоднородной формы. Однако, если мы вернемся к первоначальному определению момента инерции как суммы, мы можем заключить, что момент инерции составного объекта может быть найден из суммы каждой части объекта: Itotal = ∑iIi.Itotal = ∑iIi.10,21 Важно отметить, что моменты инерции объектов в уравнении 10.21 – это вокруг общей оси . В случае этого объекта это был бы стержень длиной L , вращающийся вокруг своего конца, и тонкий диск радиусом R , вращающийся вокруг оси, смещенной от центра на расстояние L + RL + R, где R – радиус диска. Давайте определим массу стержня как mrmr, а массу диска как md.md. Рис. 10.28 Составной объект, состоящий из диска на конце стержня. Ось вращения расположена на A . Момент инерции стержня равен просто 13mrL213mrL2, но мы должны использовать теорему о параллельности осей, чтобы найти момент инерции диска относительно показанной оси. Момент инерции диска относительно его центра равен 12mdR212mdR2, и мы применяем теорему о параллельных осях: Iparallel-axis = Icenter of mass + md2Iparallel-axis = Icenter of mass + md2, чтобы найти Параллельная ось = 12mdR2 + md (L + R) 2. Параллельная ось = 12mdR2 + md (L + R) 2.Складывая момент инерции стержня и момент инерции диска со смещенной осью вращения, мы получаем, что момент инерции составного объекта равен Itotal = 13mrL2 + 12mdR2 + md (L + R) 2.Itotal = 13mrL2 + 12mdR2 + md (L + R) 2.Применение расчета момента инерции для решения задачТеперь давайте рассмотрим некоторые практические применения расчета момента инерции. Пример 10.11Человек на каруселиРебенок весом 25 кг стоит на расстоянии r = 1,0 м = 1,0 м от оси вращающейся карусели (рис. 10.29). Карусель можно представить как однородный твердый диск массой 500 кг и радиусом 2,0 м. Найдите момент инерции этой системы.Рис. 10.29. Вычисление момента инерции ребенка на карусели. СтратегияЭта задача включает расчет момента инерции. Нам даны масса и расстояние до оси вращения ребенка, а также масса и радиус карусели. Поскольку масса и размер ребенка намного меньше, чем у карусели, мы можем аппроксимировать ребенка как точечную массу. Мы используем следующие обозначения: mc = 25kg, rc = 1.0m, mm = 500kg, rm = 2.0mmc = 25kg, rc = 1.0 м, мм = 500 кг, погон = 2,0 м.Наша цель – найти Itotal = ∑iIiItotal = ∑iIi. РешениеДля ребенка Ic = mcr2Ic = mcr2, а для карусели Im = 12mmr2Im = 12mmr2. Следовательно Итого = 25 (1) 2 + 12 (500) (2) 2 = 25 + 1000 = 1025 кг · м2. Итого = 25 (1) 2 + 12 (500) (2) 2 = 25 + 1000 = 1025 кг · м2.ЗначениеЗначение должно быть близко к моменту инерции карусели, потому что она имеет гораздо большую массу, распределенную от оси, чем ребенок.Пример 10.12Жезл и твердая сфераНайдите момент инерции стержня и твердой сферы вокруг двух осей, как показано ниже.Удочка имеет длину 0,5 м и массу 2,0 кг. Радиус сферы 20,0 см, масса 1,0 кг.СтратегияПоскольку в обоих случаях у нас есть составной объект, мы можем использовать теорему о параллельных осях, чтобы найти момент инерции относительно каждой оси. В (а) центр масс сферы расположен на расстоянии L + RL + R от оси вращения. На (b) центр масс сферы расположен на расстоянии R от оси вращения. В обоих случаях момент инерции стержня действует относительно оси на одном конце.Обратитесь к Таблице 10.4, где указаны моменты инерции для отдельных объектов.
ЗначениеИспользование теоремы о параллельных осях упрощает вычисление момента инерции составных объектов. Мы видим, что момент инерции больше в (а), чем в (б). Это потому, что ось вращения находится ближе к центру масс системы в (b). Простая аналогия – это стержень. Момент инерции относительно одного конца равен 13mL213mL2, но момент инерции через центр масс по его длине равен 112mL2112mL2.Пример 10.13Угловая скорость маятникаМаятник в форме стержня (рисунок 10.30) выходит из состояния покоя под углом 30 ° 30 °. Он имеет длину 30 см и массу 300 г. Какова его угловая скорость в самой низкой точке? Рисунок 10.30 Маятник в виде стержня выходит из состояния покоя под углом 30 ° 0,30 °.СтратегияИспользуйте сохранение энергии для решения проблемы. В момент срабатывания маятник обладает гравитационной потенциальной энергией, которая определяется по высоте центра масс над его самой низкой точкой при качании. В нижней части качелей вся потенциальная гравитационная энергия преобразуется в кинетическую энергию вращения.РешениеИзменение потенциальной энергии равно изменению кинетической энергии вращения, ΔU + ΔK = 0ΔU + ΔK = 0.В верхней части колебания: U = mghcm = mgL2 (cosθ) U = mghcm = mgL2 (cosθ). В нижней части колебания U = mgL2.U = mgL2. В верхней части качелей кинетическая энергия вращения K = 0K = 0. Внизу качелей K = 12Iω2K = 12Iω2. Следовательно: ΔU + ΔK = 0⇒ (mgL2 (1 − cosθ) −0) + (0−12Iω2) = 0ΔU + ΔK = 0⇒ (mgL2 (1 − cosθ) −0) + (0−12Iω2) = 0или 12Iω2 = mgL2 (1 − cosθ). 12Iω2 = mgL2 (1 − cosθ).Решая относительно ωω, получаем ω = mgLI (1 − cosθ) = mgL1 / 3mL2 (1 − cosθ) = g3L (1 − cosθ). ω = mgLI (1 − cosθ) = mgL1 / 3mL2 (1 − cosθ) = g3L (1 − cosθ).Подставляя числовые значения, получаем ω = 9,8 м / с 230,3 м (1-cos30) = 3,6рад / с. ω = 9,8 м / с 230,3 м (1-cos30) = 3,6рад / с.ЗначениеОбратите внимание, что угловая скорость маятника не зависит от его массы.Момент инерции (угловая и вращательная инерция): определение, уравнение, единицыБудь то фигуристка, тянущая за руки и вращающаяся быстрее, как она, или кошка, контролирующая, насколько быстро она вращается во время падения, чтобы гарантировать, что она приземлится на свою футов, понятие момента инерции имеет решающее значение для физики вращательного движения. Также известный как инерция вращения, момент инерции является вращательным аналогом массы во втором из законов движения Ньютона, описывающем склонность объекта сопротивляться угловому ускорению. Поначалу концепция может показаться не слишком интересной, но в сочетании с законом сохранения углового момента ее можно использовать для описания многих увлекательных физических явлений и предсказания движения в широком диапазоне ситуаций. Определение момента инерцииМомент инерции объекта описывает его сопротивление угловому ускорению с учетом распределения массы вокруг оси вращения. По сути, это количественная оценка того, насколько сложно изменить скорость вращения объекта, будь то начало его вращения, остановка или изменение скорости уже вращающегося объекта. Иногда его называют инерцией вращения, и полезно рассматривать его как аналог массы во втором законе Ньютона: F net = ma . Здесь массу объекта часто называют инерционной массой, и она описывает сопротивление объекта (линейному) движению.Вращательная инерция работает точно так же для вращательного движения, и математическое определение всегда включает массу. Эквивалентное выражение второму закону для вращательного движения связывает крутящий момент ( τ , вращательный аналог силы) с угловым ускорением α и моментом инерции I : \ tau = I \ alpha Один и тот же объект может иметь несколько моментов инерции, однако, поскольку большая часть определения касается распределения массы, оно также учитывает положение оси вращения. Например, в то время как момент инерции стержня, вращающегося вокруг своего центра, равен I = ML 2 /12 (где M – масса, а L – длина стержня), тот же стержень, вращающийся вокруг одного конца, имеет момент инерции, равный I = ML 2 /3. Уравнения момента инерцииТаким образом, момент инерции тела зависит от его массы M , его радиуса R и оси вращения. В некоторых случаях R обозначается как d для расстояния от оси вращения, а в других (как и в случае стержня в предыдущем разделе) оно заменяется длиной, L . Обозначение I используется для обозначения момента инерции и имеет единицы измерения: кг · м 2 . Как и следовало ожидать, исходя из того, что вы уже узнали, существует множество различных уравнений для момента инерции, и каждое относится к определенной форме и определенной оси вращения.Во всех моментах инерции появляется член MR 2 , хотя для разных форм перед этим членом указываются разные дроби, а в некоторых случаях может быть суммировано несколько членов. Компонент MR 2 – это момент инерции для точечной массы на расстоянии R от оси вращения, а уравнение для конкретного твердого тела строится как сумма точечных масс, или путем интегрирования бесконечного количества мелких точечных масс над объектом.2 Инерция вращения и ось вращенияПонимание того, почему существуют разные уравнения для каждой оси вращения, является ключевым шагом к пониманию концепции момента инерции. Подумайте о карандаше: вы можете вращать его, вращая его посередине, за конец или вращая вокруг его центральной оси. Поскольку инерция вращения объекта зависит от распределения массы вокруг оси вращения, каждая из этих ситуаций отличается и требует отдельного уравнения для ее описания. Вы можете инстинктивно понять концепцию момента инерции, если масштабируете этот же аргумент до 30-футового флагштока. Вращать его из стороны в сторону было бы очень сложно – если бы вы вообще могли с этим справиться – в то время как вращать шест вокруг его центральной оси было бы намного проще. Это связано с тем, что крутящий момент сильно зависит от расстояния от оси вращения, и в примере 30-футового флагштока, вращая его конец за концом, каждый крайний конец находится на расстоянии 15 футов от оси вращения. Однако, если крутить вокруг центральной оси, все довольно близко к оси. Ситуация очень похожа на то, как переносить тяжелый предмет на расстоянии вытянутой руки или держать его близко к телу или управлять рычагом с конца, а не рядом с точкой опоры. Вот почему вам нужно другое уравнение для описания момента инерции для одного и того же объекта в зависимости от оси вращения. Выбранная вами ось влияет на то, как далеко части тела находятся от оси вращения, даже если масса тела остается прежней. Использование уравнений для момента инерцииКлюч к вычислению момента инерции для твердого тела – это научиться использовать и применять соответствующие уравнения. Рассмотрим карандаш из предыдущего раздела, который вращается с торцом за концом вокруг центральной точки по его длине. Хотя это не идеальный стержень (например, заостренный наконечник ломает эту форму), его можно смоделировать как таковой, чтобы избавить вас от необходимости проходить полный момент инерции объекта.2 Еще более сложной задачей является определение момента инерции для составных объектов. Например, рассмотрим два шара, соединенных стержнем (который мы будем рассматривать как безмассовый, чтобы упростить задачу). 2….2 \ end {align} Момент инерции и сохранение углового моментаУгловой момент (вращательный аналог количества движения) определяется как произведение вращательной инерции (т.е. момента инерции, I ) объекта и его угловая скорость ω ), которая измеряется в градусах / с или рад / с. Вы, несомненно, знакомы с законом сохранения количества движения, и момент количества движения сохраняется таким же образом.Уравнение для углового момента L ) выглядит следующим образом: L = Iω Размышление о том, что это означает на практике, объясняет многие физические явления, потому что (в отсутствие других сил), чем выше инерция вращения объекта, тем снизить его угловую скорость. Представьте конькобежца, вращающегося с постоянной угловой скоростью с вытянутыми руками, и обратите внимание, что его вытянутые руки увеличивают радиус R , вокруг которого распределяется его масса, что приводит к большему моменту инерции, чем если бы его руки были близко к его телу. Если L 1 рассчитывается с вытянутыми руками, а L 2 , после втягивания его рук должно иметь такое же значение (поскольку угловой момент сохраняется), что произойдет, если он уменьшает его момент инерции, притягивая руки? Его угловая скорость ω увеличивается для компенсации. Кошки выполняют аналогичные движения, чтобы помочь им приземлиться на ноги при падении. Вытягивая ноги и хвост, они увеличивают момент инерции и уменьшают скорость вращения, и, наоборот, они могут втягивать ноги, чтобы уменьшить момент инерции и увеличить скорость вращения.Они используют эти две стратегии – наряду с другими аспектами своего «рефлекса выпрямления» – для обеспечения того, чтобы их ноги приземлялись первыми, и вы можете увидеть отдельные фазы сворачивания и вытягивания на покадровых фотографиях приземления кошки. Момент инерции и вращательная кинетическая энергияПродолжая параллели между линейным движением и вращательным движением, объекты также обладают кинетической энергией вращения точно так же, как и линейной кинетической энергией. |