
Формула момента инерции диска, J
Момент инерции тела, которое можно представить в виде совокупности дискретных частиц, относительно оси вращения равен:
где – масса i-ой материальной точки тела; – расстояние от материальной точки i до оси вращения. При рассмотрении твердого тела как сплошной среды с непрерывным распределением массы определение момента инерции заменяют следующим:
где – элемент массы тела; – плотность тела; – элементарный объем.
Момент инерции однородного диска
Рассмотрим, как находится момент инерции однородного диска, если его радиус равен R, а масса m. Ось вращения пусть проходит через центр инерции данного диска (точку О) и будет перпендикулярна его плоскости (рис.1).
Диск можно заменить совокупностью бесконечно тонких колец, радиусы которых изменяются от нуля до R. На рис.1 выделено одно из таких колец. Рассмотрим это кольцо. Радиус его обозначим как Момент инерции данного кольца (обозначим его равен (см.
Массу данного кольца (а точнее цилиндра) можно представить как:
где – высота цилиндра. Подставим выражение для в формулу (3) и проведем интегрирование:
где – масса диска.
Если диск можно считать абсолютно тонким или он является частью цилиндра, то формула для вычисления момента инерции диска относительно оси, проходящей через его центр масс, и перпендикулярной плоскости диска, имеет вид:
В случае плоского распределения масс выполняется равенство:
где оси вращения совпадают с осями декартово системы координат. И если мы будем считать, что ось Z проходит через центр инерции диска и перпендикулярна его плоскости, то моменты инерции относительно осе X и Y будут равны:
Иногда величины моментов инерции называют моментами инерции диска относительно его диаметров.
Примеры решения задач по теме «Момент инерции диска»
Задачи на тему Динамика вращательного движения твердого тела вокруг неподвижной оси
Физические основы механики
§ 3. Динамика вращательного движения твердого тела вокруг неподвижной оси
Динамика вращательного движения твердого тела вокруг неподвижной оси
Условия задач и ссылки на решения по данной теме:
1 Вычислить момент инерции молекулы NO2 относительно оси z, проходящей через центр масс молекулы перпендикулярно плоскости, содержащей ядра атомов. Межъядерное расстояние d этой молекулы равно 0,118 нм, валентный угол 140РЕШЕНИЕ
2 Физический маятник представляет собой стержень длиной 1 м и массой m1=1 кг с прикрепленным к одному из его концов диском массой m2=0,5 m1. Определить момент инерции Jz такого маятника относительно оси Оz, проходящей через точку O на стержне перпендикулярно плоскости чертежа
РЕШЕНИЕ
3 Вал в виде сплошного цилиндра массой m1=10 кг насажен на горизонтальную ось. На цилиндр намотан шнур, к свободному концу которого подвешена гиря массой m2=2 кг. С каким ускорением a будет опускаться гиря, если ее предоставить самой себе?
РЕШЕНИЕ
4 Через блок в виде диска, имеющий массу m=80 г, перекинута тонкая гибкая нить, к концам которой подвешены грузы массами m1=100 г и m2=200 г. С каким ускорением будут двигаться грузы, если их предоставить самим себе? Трением пренебречь.
С каким ускорением будут двигаться грузы, если их предоставить самим себе? Трением пренебречь.
РЕШЕНИЕ
5 Маховик в виде диска массой m=50 кг и радиусом 20 см был раскручен до частоты вращения 480 мин-1 и затем предоставлен самому себе. Вследствие трения маховик остановился. Найти момент сил трения, считая его постоянным для двух случаев-маховик остановился через t=50 c; маховик до полной остановки сделал N=200 оборотов.
РЕШЕНИЕ
6 Платформа в виде диска радиусом R=1,5 м и массой m1=180 кг вращается по инерции около вертикальной оси с частотой n=10 мин-1. В центре платформы стоит человек массой m2=60 кг. Какую линейную скорость относительно пола помещения будет иметь человек, если он перейдет на край платформы
РЕШЕНИЕ
7 Человек стоит в центре скамьи Жуковского и вместе с ней вращается по инерции. Частота вращения n1=0,5 с-1. Момент инерции тела человека относительно оси вращения равен 1,6 кг*м2. В вытянутых в стороны руках человек держит по гире массой m=2 кг каждая. Расстояние между гирями l1= 1,6 м. Определить частоту вращения n2 скамьи с человеком, когда он опустит руки и расстояние l2 между гирями станет равным 0,4 м. Моментом инерции скамьи пренебречь.
Расстояние между гирями l1= 1,6 м. Определить частоту вращения n2 скамьи с человеком, когда он опустит руки и расстояние l2 между гирями станет равным 0,4 м. Моментом инерции скамьи пренебречь.
РЕШЕНИЕ
8 Стержень длиной l=1,5 м и массой M=10 кг может вращаться вокруг неподвижной оси, проходящей через верхний конец стержня. В середину стержня ударяет пуля массой m=10 г, летящая в горизонтальном направлении со скоростью v0=500 м/с, и застревает в стержне. На какой угол отклонится стержень после удара?
РЕШЕНИЕ
3.1 Определить момент инерции J материальной точки массой m=0,3 кг относительно оси, отстоящей от точки на r=20 см.
РЕШЕНИЕ
3.2 Два маленьких шарика массой m=10 г каждый скреплены тонким невесомым стержнем длиной l=20 см. Определить момент инерции системы относительно оси, перпендикулярной стержню и проходящей через центр масс.
РЕШЕНИЕ
3.3 Два шара массами m и 2m, m=10 г закреплены на тонком невесомом стержне длиной l=40 см так, как это указано на рис. 3.7. Определить моменты инерции J системы относительно оси, перпендикулярной стержню и проходящей через его конец в этих двух случаях. Размерами шаров пренебречь.
3.7. Определить моменты инерции J системы относительно оси, перпендикулярной стержню и проходящей через его конец в этих двух случаях. Размерами шаров пренебречь.
РЕШЕНИЕ
3.4 Три маленьких шарика массой m=10 г каждый расположены в вершинах равностороннего треугольника со стороной a=20 см и скреплены между собой. Определить момент инерции системы относительно оси перпендикулярной плоскости треугольника и проходящей через центр описанной окружности; лежащей в плоскости треугольника и проходящей через центр описанной окружности и одну из вершин треугольника. Массой стержней, соединяющих шары, пренебречь.
РЕШЕНИЕ
3.5 Определить моменты инерции Jx, Jу, Jz трехатомных молекул типа АВ2 относительно осей x, y, z, проходящих через центр инерции С молекулы (ось z перпендикулярна плоскости ху). Межъядерное расстояние AB обозначено d, валентный угол α. Вычисления выполнить для следующих молекул h3O(d=0,097 нм, α=104°30; SO2(d=0,145 нм, α=124)
РЕШЕНИЕ
3.6 Определить момент инерции J тонкого однородного стержня длиной l=30 см и массой m=100 г относительно оси, перпендикулярной стержню и проходящей через его конец; его середину; точку, отстоящую от конца стержня на 1/3 его длины.
РЕШЕНИЕ
3.7 Определить момент инерции тонкого однородного стержня длиной l=60 см и массой m=100 г относительно оси, перпендикулярной ему и проходящей через точку стержня, удаленную на a=20 см от одного из его концов.
РЕШЕНИЕ
3.8 Вычислить момент инерции J проволочного прямоугольника со сторонами a=12 см и b=16 см относительно оси, лежащей в плоскости прямоугольника и проходящей через середины малых сторон. Масса равномерно распределена по длине проволоки с линейной плотностью τ=0,1 кг/м.
РЕШЕНИЕ
3.9 Два однородных тонких стержня-AB длиной l1=40 см и массой m1=900 г и CD длиной l2=40 см и массой m2=400 г скреплены под прямым углом. Определить момент инерции J системы стержней относительно оси OO, проходящей через конец стержня AB параллельно стержню CD.
РЕШЕНИЕ
3.10 Решить предыдущую задачу для случая, когда ось OO проходит через точку A перпендикулярно плоскости чертежа.
РЕШЕНИЕ
3.11 Определить момент инерции J проволочного равностороннего треугольника со стороной a=10 см относительно оси, лежащей в плоскости треугольника и проходящей через его вершину параллельно стороне, противоположной этой вершине; оси, совпадающей с одной из сторон треугольника. Масса m треугольника равна 12 г и равномерно распределена по длине проволоки.
Масса m треугольника равна 12 г и равномерно распределена по длине проволоки.
РЕШЕНИЕ
3.12 На концах тонкого однородного стержня длиной l и массой Зm прикреплены маленькие шарики массами m и 2m. Определить момент инерции J такой системы относительно оси, перпендикулярной стержню и проходящей через точку O, лежащую на оси стержня. Вычисления выполнить для случаев изображенных на рис. 3.11. При расчетах принять l=1 м, m=0,1 кг. Шарики рассматривать как материальные точки.
РЕШЕНИЕ
3.13 Найти момент инерции J тонкого однородного кольца радиусом R=20 см и массой m=100 г относительно оси, лежащей в плоскости кольца и проходящей через его центр.
РЕШЕНИЕ
3.14 Определить момент инерции J кольца массой m=50 г и радиусом R=10 см относительно оси, касательной к кольцу.
РЕШЕНИЕ
3.15 Диаметр диска d=20 см, масса m=800 г. Определить момент инерции диска относительно оси, проходящей через середину одного из радиусов перпендикулярно плоскости диска.
РЕШЕНИЕ
3. 16 В однородном диске массой m=1 кг и радиусом r=30 см вырезано круглое отверстие диаметром d=20 см, центр которого находится на расстоянии l=15 см от оси диска. Найти момент инерции J полученного тела относительно оси, проходящей перпендикулярно плоскости диска через его центр.
16 В однородном диске массой m=1 кг и радиусом r=30 см вырезано круглое отверстие диаметром d=20 см, центр которого находится на расстоянии l=15 см от оси диска. Найти момент инерции J полученного тела относительно оси, проходящей перпендикулярно плоскости диска через его центр.
РЕШЕНИЕ
3.17 Найти момент инерции J плоской однородной прямоугольной пластины массой m=800 г относительно оси, совпадающей с одной из ее сторон, если длина a другой стороны равна 40 см.
РЕШЕНИЕ
3.18 Определить момент инерции J тонкой плоской пластины со сторонами a=10 см и b=20 см относительно оси, проходящей через центр масс пластины параллельно большей стороне. Масса пластины равномерно распределена по ее площади с поверхностной плотностью 1,2 кг/м2.
РЕШЕНИЕ
3.19 Тонкий однородный стержень длиной l=1 м может свободно вращаться вокруг горизонтальной оси, проходящей через точку O на стержне. Стержень отклонили от вертикали на угол α и отпустили. Определить для начального момента времени угловое ε и тангенциальное aτ ускорения точки В на стержне.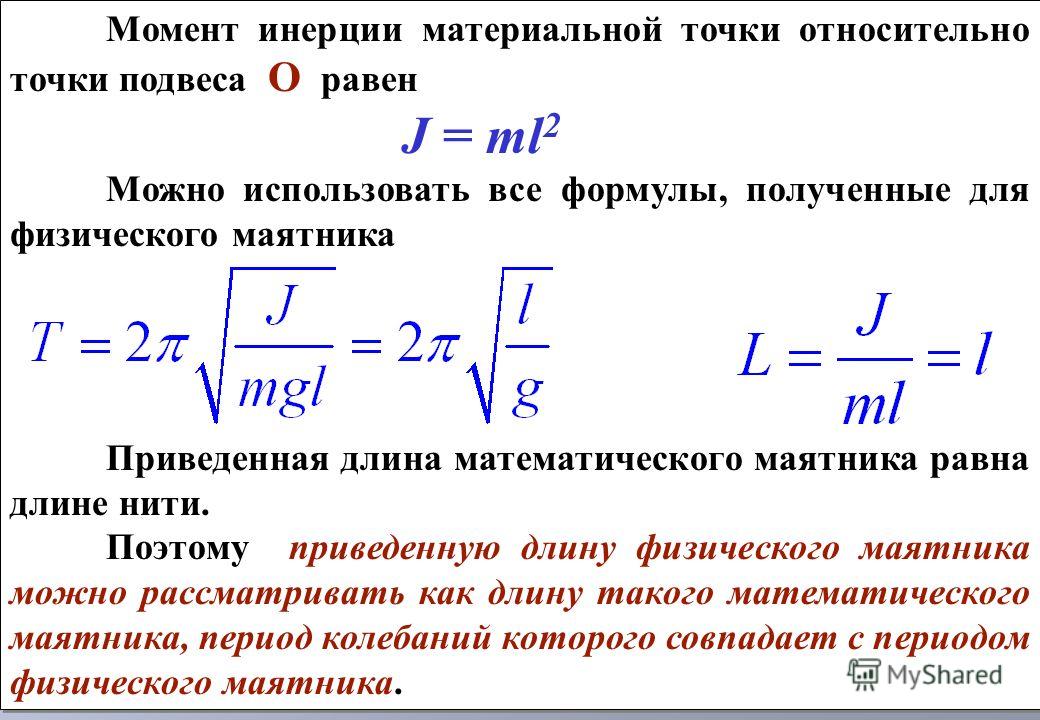 Вычисления произвести для следующих случаев a=0, b=2/3 l, α=π/2; a=l/3, b=l, α=π/3; a=l/4, b=l/2, α=2/3 π
Вычисления произвести для следующих случаев a=0, b=2/3 l, α=π/2; a=l/3, b=l, α=π/3; a=l/4, b=l/2, α=2/3 π
РЕШЕНИЕ
3.20 Однородный диск радиусом R=10 см может свободно вращаться вокруг горизонтальной оси, перпендикулярной плоскости диска и проходящей через точку O на нем. Диск отклонили на угол α и отпустили. Определить для начального момента времени угловое и тангенциальное ускорения точки B, находящейся на диске. Вычисления выполнить для следующих случаев a=R, b=R/2, α=π/2; a=R/2, b=R, α=π/6; a=2/3 R, b=2/3 R, α=2/3 π
РЕШЕНИЕ
3.21 Тонкий однородный стержень длиной l=50 см и массой m=400 г вращается с угловым ускорением 3 рад/с2 около оси, проходящей перпендикулярно стержню через его середину. Определить вращающий момент M.
РЕШЕНИЕ
3.22 На горизонтальную ось насажены маховик и легкий шкив радиусом R=5 см. На шкив намотан шнур, к которому привязан груз массой m=0,4 кг. Опускаясь равноускоренно, груз прошел путь s=1,8 м за время t=3 c. Определить момент инерции маховика. Массу шкива считать пренебрежимо малой.
Массу шкива считать пренебрежимо малой.
РЕШЕНИЕ
3.23 Вал массой m=100 кг и радиусом R=5 см вращался с частотой n=8 с-1. К цилиндрической поверхности вала прижали тормозную колодку с силой F=40 Н, под действием которой вал остановился через t=10 c. Определить коэффициент трения
РЕШЕНИЕ
3.24 На цилиндр намотана тонкая гибкая нерастяжимая лента, массой которой по сравнению с массой цилиндра можно пренебречь. Свободный конец ленты прикрепили к кронштейну и предоставили цилиндру опускаться под действием силы тяжести. Определить линейное ускорение a оси цилиндра, если цилиндр сплошной; полый тонкостенный.
РЕШЕНИЕ
3.25 Через блок, имеющий форму диска, перекинут шнур. К концам шнура привязали грузики массой m1= 100 г и m2=110 г. С каким ускорением a будут двигаться грузики, если масса m блока равна 400 г? Трение при вращении блока ничтожно мало.
РЕШЕНИЕ
3.26 Два тела массами m1=0,25 кг и m2=0,15 кг связаны тонкой нитью, переброшенной через блок. Блок укреплен на краю горизонтального стола, по поверхности которого скользит тело массой m1. С каким ускорением a движутся тела и каковы силы T1 и T2 натяжения нити по обе стороны от блока? Коэффициент трения тела о поверхность стола равен 0,2. Масса m блока равна 0,1 кг и ее можно считать равномерно распределенной по ободу. Массой нити и трением в подшипниках оси блока пренебречь.
С каким ускорением a движутся тела и каковы силы T1 и T2 натяжения нити по обе стороны от блока? Коэффициент трения тела о поверхность стола равен 0,2. Масса m блока равна 0,1 кг и ее можно считать равномерно распределенной по ободу. Массой нити и трением в подшипниках оси блока пренебречь.
РЕШЕНИЕ
3.27 Через неподвижный блок массой m=0,2 кг перекинут шнур, к концам которого подвесили грузы массами m1=0,3 кг и m2=0,5 кг. Определить силы натяжения T1 и T2 шнура по обе стороны блока во время движения грузов, если масса блока равномерно распределена по ободу.
РЕШЕНИЕ
3.28 Шар массой m=10 кг и радиусом R=20 см вращается вокруг оси, проходящей через его центр. Уравнение вращения шара имеет вид φ=A+Bt2+Сt3, где В=4 рад/с2, С=-1 рад/с3. Найти закон изменения момента сил, действующих на шар. Определить момент сил M в момент времени t=2 c.
РЕШЕНИЕ
3.29 Однородный тонкий стержень массой m1=0,2 кг и длиной 1 м может свободно вращаться вокруг горизонтальной оси z, проходящей через точку O. В точку A на стержне попадает пластилиновый шарик, летящий горизонтально перпендикулярно оси z со скоростью v=10 м/с и прилипает к стержню. Масса m2 шарика равна 10 г. Определить угловую скорость стержня и линейную скорость u нижнего конца стержня в начальный момент времени. Вычисления выполнить для следующих значений расстояния между точками A и О l/2; l/3; l/4
В точку A на стержне попадает пластилиновый шарик, летящий горизонтально перпендикулярно оси z со скоростью v=10 м/с и прилипает к стержню. Масса m2 шарика равна 10 г. Определить угловую скорость стержня и линейную скорость u нижнего конца стержня в начальный момент времени. Вычисления выполнить для следующих значений расстояния между точками A и О l/2; l/3; l/4
РЕШЕНИЕ
3.30 Однородный диск массой m1=0,2 кг и радиусом R=20 см может свободно вращаться вокруг горизонтальной оси z, перпендикулярной плоскости диска и проходящей через точку C. В точку A на образующей диска попадает пластилиновый шарик, летящий горизонтально перпендикулярно оси z со скоростью v=10 м/с, и прилипает к его поверхности. Масса шарика равна 10 г. Определить угловую скорость диска и линейную скорость u точки O на диске в начальный момент времени. Вычисления выполнить для следующих значений а и b:a=b=R; a=R/2, b=R; a=2R/3, b=R/2; a=R/3, b=2R/3.
РЕШЕНИЕ
3.31 Человек стоит на скамье Жуковского и ловит рукой мяч массой m=0,4 кг, летящий в горизонтальном направлении со скоростью 20 м/с. Траектория мяча проходит на расстоянии r=0,8 м от вертикальной оси вращения скамьи. С какой угловой скоростью начнет вращаться скамья Жуковского с человеком, поймавшим мяч, если суммарный момент инерции J человека и скамьи равен 6 кг*м2?
Траектория мяча проходит на расстоянии r=0,8 м от вертикальной оси вращения скамьи. С какой угловой скоростью начнет вращаться скамья Жуковского с человеком, поймавшим мяч, если суммарный момент инерции J человека и скамьи равен 6 кг*м2?
РЕШЕНИЕ
3.32 Маховик, имеющий вид диска радиусом R=40 см и массой m1=48 кг, может вращаться вокруг горизонтальной оси. К его цилиндрической поверхности прикреплен конец нерастяжимой нити, к другому концу которой подвешен груз массой m2=0,2 кг. Груз был приподнят и затем опущен. Упав свободно с высоты h=2 м, груз натянул нить и благодаря этому привел маховик во вращение. Какую угловую скорость груз сообщил при этом маховику?
РЕШЕНИЕ
3.33 На краю горизонтальной платформы, имеющей форму диска радиусом R=2 м, стоит человек массой m1=80 кг. Масса m2 платформы равна 240 кг. Платформа может вращаться вокруг вертикальной оси, проходящей через ее центр. Пренебрегая трением, найти, с какой угловой скоростью будет вращаться платформа, если человек будет идти вдоль ее края со скоростью v=2 м/с относительно платформы.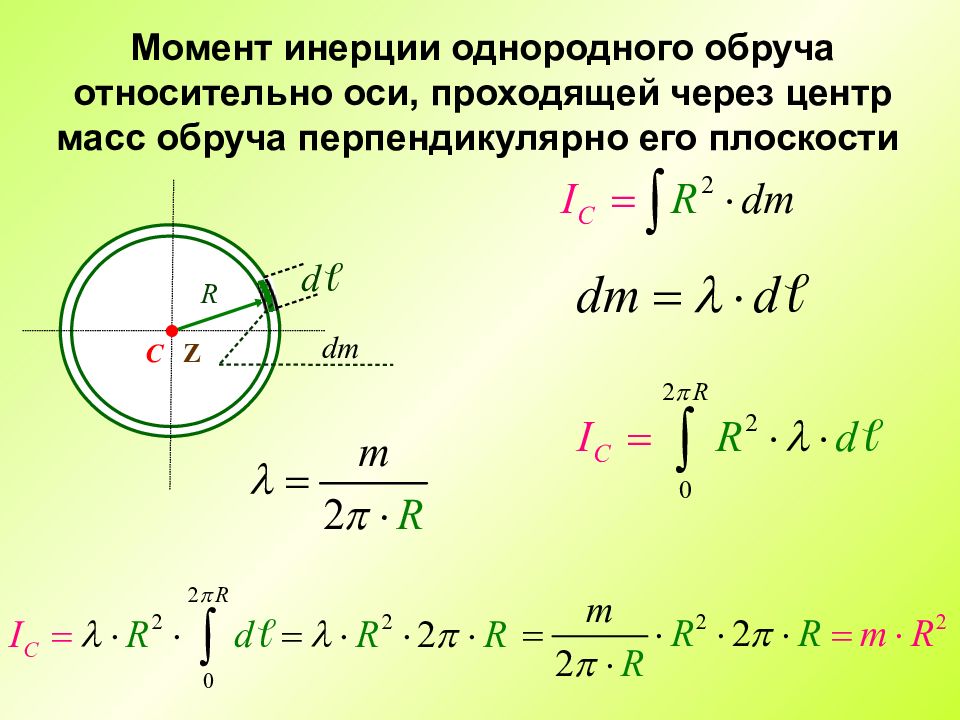
РЕШЕНИЕ
3.34 Платформа, имеющая форму диска, может вращаться около вертикальной оси. На краю платформы стоит человек массой m1=60 кг. На какой угол повернется платформа, если человек пойдет вдоль края платформы и, обойдя его, вернется в исходную точку на платформе? Масса m2 платформы равна 240 кг. Момент инерции J человека рассчитывать как для материальной точки.
РЕШЕНИЕ
3.35 Платформа в виде диска радиусом R=1 м вращается по инерции с частотой 6 мин-1. На краю платформы стоит человек, масса m которого равна 80 кг. С какой частотой n будет вращаться платформа, если человек перейдет в ее центр? Момент инерции J платформы равен 120 кг*м2. Момент инерции человека рассчитывать как для материальной точки.
РЕШЕНИЕ
3.36 В центре скамьи Жуковского стоит человек и держит в руках стержень длиной l=2,4 м и массой m=8 кг, расположенный вертикально по оси вращения скамейки. Скамья с человеком вращается с частотой n1=1 с-1. С какой частотой n2 будет вращаться скамья с человеком, если он повернет стержень в горизонтальное положение? Суммарный момент инерции J человека и скамьи равен 6 кг*м2.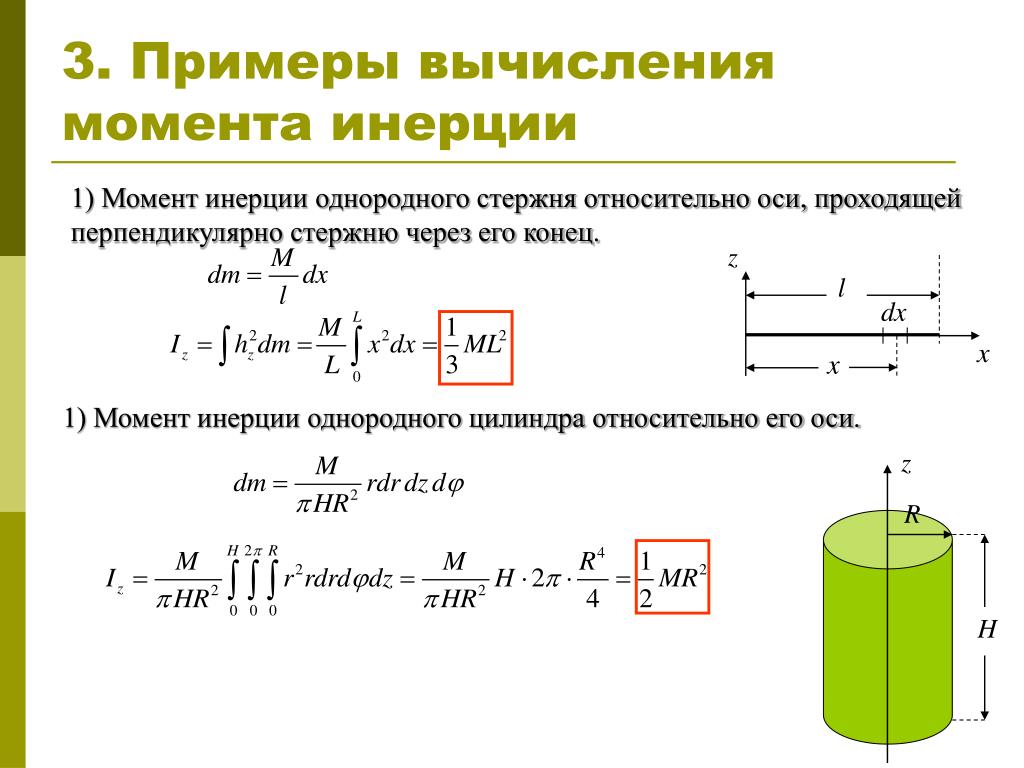
РЕШЕНИЕ
3.37 Человек стоит на скамье Жуковского и держит в руках стержень, расположенный вертикально вдоль оси вращения скамейки. Стержень служит осью вращения колеса, расположенного на верхнем конце стержня. Скамья неподвижна, колесо вращается с частотой n=10 с-1. Радиус колеса равен 20 см, его масса m=3 кг. Определить частоту вращения n2 скамьи, если человек повернет стержень на угол 180? Суммарный момент инерции J человека и скамьи равен 6 кг*м2. Массу колеса можно считать равномерно распределенной по ободу.
РЕШЕНИЕ
3.38 Шарик массой m=100 г, привязанный к концу нити длиной 1 м, вращается, опираясь на горизонтальную плоскость, с частотой n1=1 с-1. Нить укорачивается и шарик приближается к оси вращения до расстояния l2=0,5 м. С какой частотой n2 будет при этом вращаться шарик? Какую работу A совершит внешняя сила, укорачивая нить? Трением шарика о плоскость пренебречь.
РЕШЕНИЕ
3.39 Маховик вращается по закону, выражаемому уравнением A+Вt+Сt2, где A=2 рад, В=32 рад/с, С=-4 рад/с2.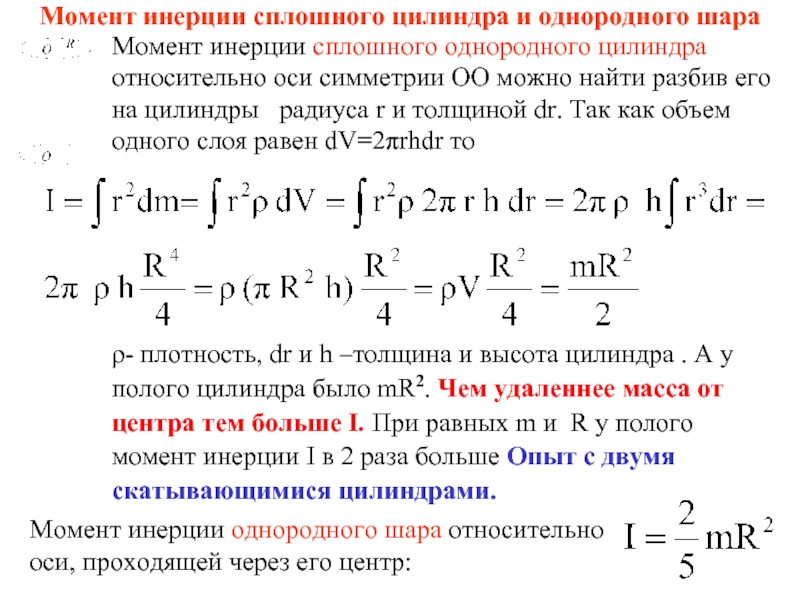 Найти среднюю мощность, развиваемую силами, действующими на маховик при его вращении, до остановки, если его момент инерции J=100 кг*м2.
Найти среднюю мощность, развиваемую силами, действующими на маховик при его вращении, до остановки, если его момент инерции J=100 кг*м2.
РЕШЕНИЕ
3.40 Маховик вращается по закону, выражаемому уравнением φ=A+Вt+Сt2, где A=2 рад, В=16 рад/с, С=-2 рад/с2. Момент инерции маховика равен 50 кг*м2. Найти законы, по которым меняются вращающий момент и мощность. Чему равна мощность в момент времени t=3 с?
РЕШЕНИЕ
3.41 Якорь мотора вращается с частотой n=1500 мин-1. Определить вращающий момент, если мотор развивает мощность N=500 Вт.
РЕШЕНИЕ
3.42 Со шкива диаметром d=0,48 м через ремень передается мощность N=9 кВт. Шкив вращается с частотой n=240 мин-1. Сила натяжения T1 ведущей ветви ремня в два раза больше силы натяжения T2 ведомой ветви. Найти силы натяжения обеих ветвей ремня.
РЕШЕНИЕ
3.43 Для определения мощности мотора на его шкив диаметром d=20 см накинули ленту. К одному концу ленты прикреплен динамометр, к другому подвесили груз P. Найти мощность N мотора, если мотор вращается с частотой n=24 с-1, масса m груза равна 1 кг и показание динамометра F=24 Н.
РЕШЕНИЕ
3.44 Маховик в виде диска массой m=80 кг и радиусом R=30 см находится в состоянии покоя. Какую работу нужно совершить, чтобы сообщить маховику частоту n=10 с-1? Какую работу A2 пришлось бы совершить, если бы при той же массе диск имел меньшую толщину, но вдвое больший радиус?
РЕШЕНИЕ
3.45 Кинетическая энергия T вращающегося маховика равна 1 кДж. Под действием постоянного тормозящего момента маховик начал вращаться равнозамедленно и, сделав N=80 оборотов, остановился. Определить момент M силы торможения.
РЕШЕНИЕ
3.46 Маховик, момент инерции которого равен 40 кг*м2, начал вращаться равноускоренно из состояния покоя под действием момента силы M=20 Н*м. Вращение продолжалось в течение t=10 c. Определить кинетическую энергию T, приобретенную маховиком.
РЕШЕНИЕ
3.47 Пуля массой m=10 г летит со скоростью v=800 м/с, вращаясь около продольной оси с частотой n=3000 с-1. Принимая пулю за цилиндрик диаметром d=8 мм, определить полную кинетическую энергию T пули.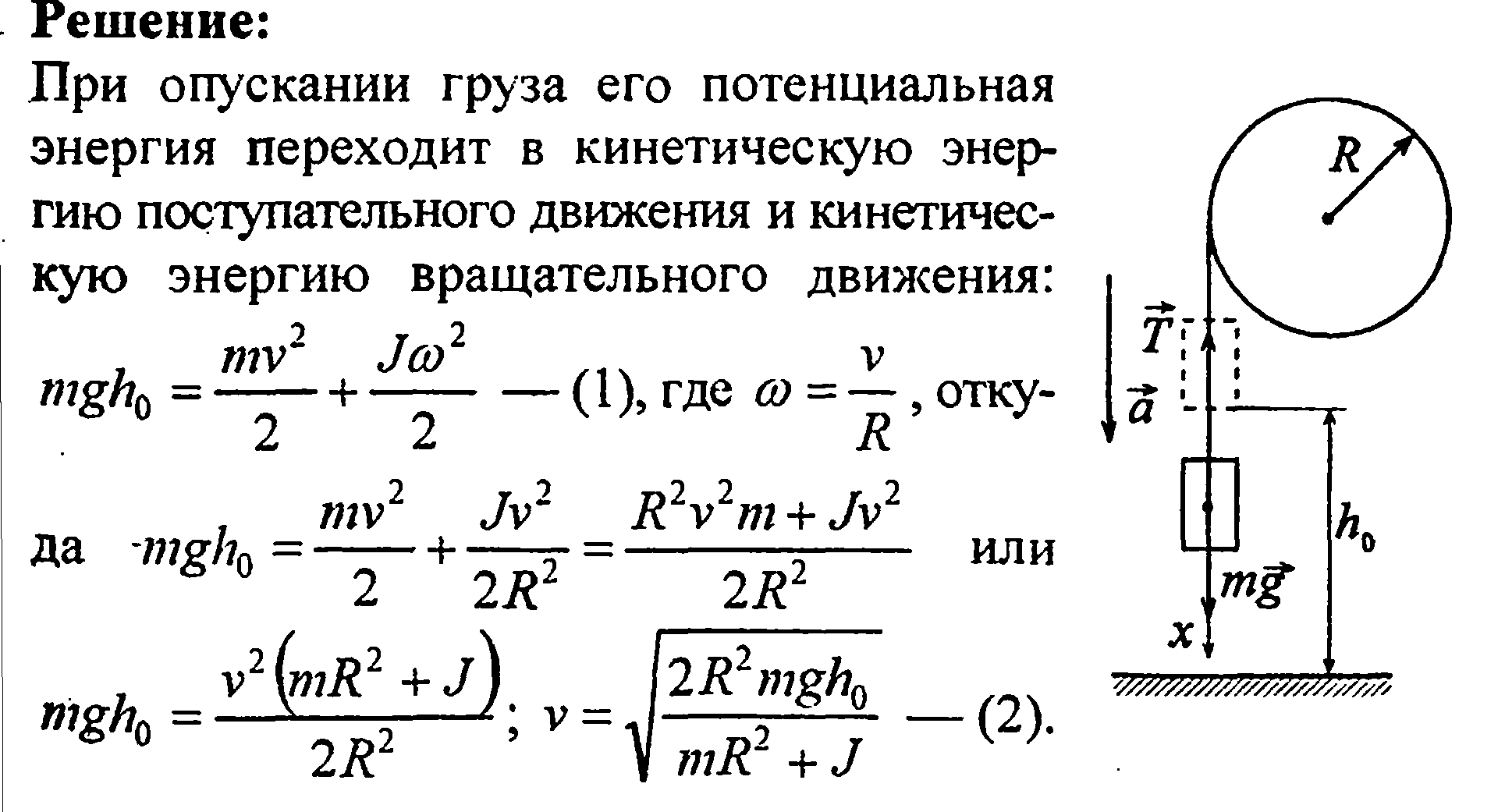
РЕШЕНИЕ
3.48 Сплошной цилиндр массой m=4 кг катится без скольжения по горизонтальной поверхности. Линейная скорость оси цилиндра равна 1 м/с. Определить полную кинетическую энергию T цилиндра.
РЕШЕНИЕ
3.49 Обруч и сплошной цилиндр, имеющие одинаковую массу m=2 кг, катятся без скольжения с одинаковой скоростью v=5 м/с. Найти кинетические энергии T1 и T2 этих тел.
РЕШЕНИЕ
3.50 Шар катится без скольжения по горизонтальной поверхности. Полная кинетическая энергия T шара равна 14 Дж. Определить кинетическую энергию T1 поступательного и T2 вращательного движения шара.
РЕШЕНИЕ
3.51 Определить линейную скорость v центра шара, скатившегося без скольжения с наклонной плоскости высотой h=1 м.
РЕШЕНИЕ
3.52 Сколько времени t будет скатываться без скольжения обруч с наклонной плоскости длиной l=2 м и высотой h=10 см?
РЕШЕНИЕ
3.53 Тонкий прямой стержень длиной l=1 м прикреплен к горизонтальной оси, проходящей через его конец. Стержень отклонили на угол 60 от положения равновесия и отпустили. Определить линейную скорость v нижнего конца стержня в момент прохождения через положение равновесия.
Определить линейную скорость v нижнего конца стержня в момент прохождения через положение равновесия.
РЕШЕНИЕ
3.54 Однородный тонкий стержень длиной l=1 м может свободно вращаться вокруг горизонтальной оси z, проходящей через точку O на стержне. Стержень отклонили от положения равновесия на угол α и отпустили. Определить угловую скорость стержня и линейную скорость точки B на стержне в момент прохождения им положения равновесия. Вычисления выполнить для следующих случаев: a=0, b=l/2, α=π/3; a=l/3, b=2l/3, α=π/2; a=l/4, b=l, α=2π/3
РЕШЕНИЕ
3.55 Карандаш длиной l=15 см, поставленный вертикально, падает на стол. Какую угловую и линейную v скорости будет иметь в конце падения середина карандаша? верхний его конец? Считать, что трение настолько велико, что нижний конец карандаша не проскальзывает.
РЕШЕНИЕ
3.56 Однородный диск радиусом R=20 см может свободно вращаться вокруг горизонтальной оси z, перпендикулярной плоскости диска и проходящей через точку O. Определить угловую и линейную v скорости точки В на диске в момент прохождения им положения равновесия. Вычисления выполнить для следующих случаев a=b=R, α=π/2; a=R/2, b=0, α=π/3; a=2R/3, b=2R/3, α=5π/6; a=R/3, b=R, α=2π/3.
Вычисления выполнить для следующих случаев a=b=R, α=π/2; a=R/2, b=0, α=π/3; a=2R/3, b=2R/3, α=5π/6; a=R/3, b=R, α=2π/3.
РЕШЕНИЕ
Момент инерции блока формула. Вычисление моментов инерции
В динамике поступательного движения материальной точки кроме кинематических характеристик вводились понятия силы и массы. При изучении динамики вращательного движения вводятся физические величины – момент сил и момент инерции , физический смысл которых раскроем ниже.
Пусть некоторое тело под действием силы , приложенной в точке А , приходит во вращение вокруг оси ОО” (рисунок 5.1).
Рисунок 5.1 – К выводу понятия момента силы
Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р , опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы . Произведение силы на плечо определяет модуль момента силы относительно точки О :
(5.1)
Момент силы есть вектор, определяемый векторным произведением радиуса-вектора точки приложения силы и вектора силы :
(5. 2)
2)
Единица момента силы – ньютон-метр (Н . м). Направление вектора момента силы находиться с помощью
Мерой инертности тел при поступательном движении является масса. Инертность тел при вращательном движении зависит не только от массы, но и от ее распределения в пространстве относительно оси вращения. Мерой инертности при вращательном движении служит величина, называемая моментом инерции тела относительно оси вращения.
Момент инерции материальной точки относительно оси вращения – произведение массы этой точки на квадрат расстояния от оси :
Момент инерции тела относительно оси вращения – сумма моментов инерции материальных точек, из которых состоит это тело
(5.4)
В общем случае, если тело сплошное и представляет собой совокупность точек с малыми массами dm , момент инерции определяется интегрированием:
, (5.5)
где r – расстояние от оси вращения до элемента массой dm .
Если тело однородно и его плотность ρ = m /V , то момент инерции тела
(5.6)
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Наиболее просто определяется момент инерции тел, имеющих правильную геометрическую форму и равномерное распределение массы по объему.
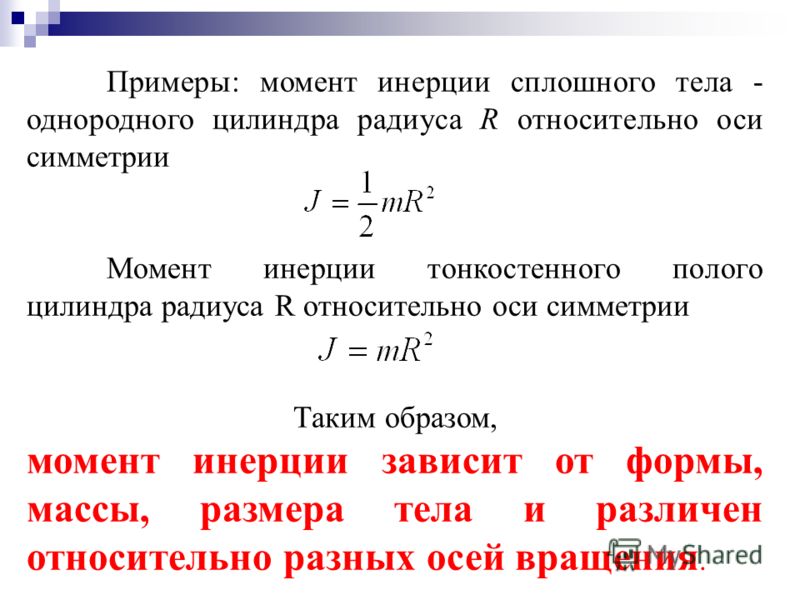
Момент инерции однородного цилиндра относительно оси, перпендикулярной его основанию и проходящей через центр инерции,
(5.8)
Момент инерции тонкостенного цилиндра или обруча относительно оси, перпендикулярной плоскости его основания и проходящей через его центр,
Момент инерции шара относительно диаметра
(5.10)
Определим момент инерции диска относительно оси, проходящей через центр инерции и перпендикулярной плоскости вращения. Пусть масса диска –
Пусть масса диска –
Площадь кольца (рисунок 5.2), заключенного между r и , равна .
Рисунок 5.2 – К выводу момента инерции диска
Площадь диска . При постоянной толщине кольца,
откуда или .
Тогда момент инерции диска,
Для наглядности на рисунке 5.3 изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
Рисунок 5.3 – Моменты инерции I C некоторых однородных твердых тел.
Теорема Штейнера
Приведенные выше формулы для моментов инерции тел даны при условии, что ось вращения проходит через центр инерции. Чтобы определить моменты инерции тела относительно произвольной оси, следует воспользоваться
(5. 12)
12)
где m – масса тела, d – расстояние от центра масс до выбранной оси вращения. Единица момента инерции – килограмм-метр в квадрате (кг . м 2).
Так, момент инерции однородного стержня длиной l относительно оси, проходящей через его конец, по теореме Штейнера равен
Пусть твёрдое тело вращается вокруг оси Z (рисунок 6). Его можно представить как неизменную с течением времени систему разных материальных точек m i , каждая из которых движется по окружности радиусом r i , лежащей в плоскости, перпендикулярной оси Z. Угловые скорости всех материальных точек одинаковы. Моментом инерции тела относительно оси Z называется величина:
где – момент инерции отдельной материальной точки относительно оси ОZ. Из определения вытекает, что момент инерции – аддитивная величина , т. е. момент инерции тела, состоящего из отдельных частей, равен сумме моментов инерции частей.
Рисунок 6
Очевидно, [I ] = кг×м 2 .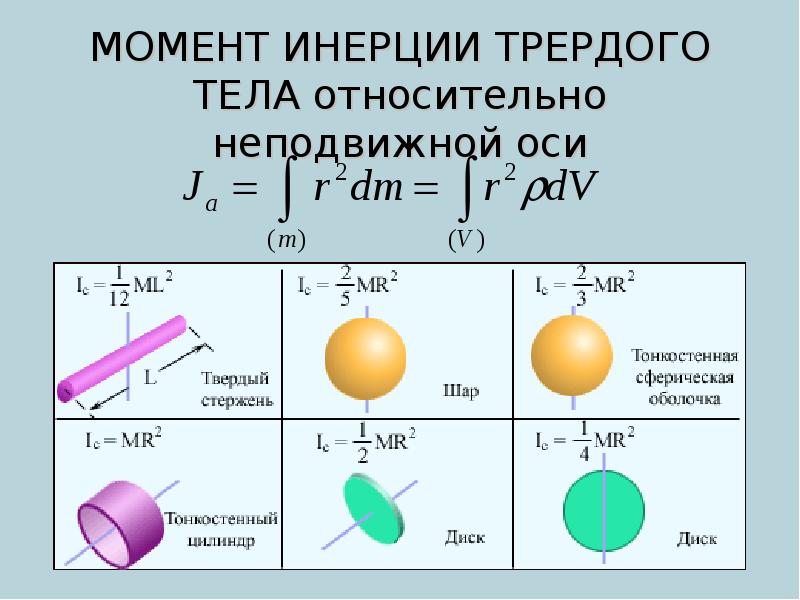 Важность понятия момента инерции выражается в трёх формулах:
Важность понятия момента инерции выражается в трёх формулах:
; ; .
Первая из них выражает момент импульса тела, которое вращается вокруг неподвижной оси Z (полезно эту формулу сравнить с выражением для импульса тела P = mV c , где V c – скорость центра масс). Вторая формула носит название основного уравнения динамики вращательного движения тела вокруг неподвижной оси, т.е., иначе говоря, второго закона Ньютона для вращательного движения (сравним с законом движения центра масс: ). Третья формула выражает кинетическую энергию тела, вращающегося вокруг неподвижной оси (сравним с выражением для кинетической энергии частицы ). Сравнение формул позволяет сделать вывод о том, что момент инерции во вращательном движении играет роль, аналогичную массе в том смысле, что чем больше момент инерции тела, тем меньше угловое ускорение при прочих равных условиях оно приобретает (тело, образно говоря, труднее раскрутить). Реально вычисление моментов инерции сводится к вычислению тройного интеграла и может быть произведено лишь для ограниченного числа симметричных тел и лишь для осей симметрии.
I c = I cx cos 2 a + I cy cos 2 b + I cz cos 2 g (*)
Рассмотрим кратко вычисление момента инерции для простейших тел.
1. Момент инерции длинного тонкого однородного стержня относительно оси, проходящей через центр масс стержня и ему перпендикулярной.
Пусть т – масса стержня, l – его длина.
,
Индекс «с » у момента инерции I c означает, что это момент инерции относительно оси, проходящий через точку центра масс (центр симметрии тела), C(0,0,0).
2. Момент инерции тонкой прямоугольной пластинки.
; ;
3. Момент инерции прямоугольного параллелепипеда.
, т. С(0,0,0)
4. Момент инерции тонкого кольца.
;
, т. С(0,0,0)
5. Момент инерции тонкого диска.
В силу симметрии
; ;
6. Момент инерции сплошного цилиндра.
;
В силу симметрии:
7. Момент инерции сплошного шара.
, т. С(0,0,0)
8. Момент инерции сплошного конуса.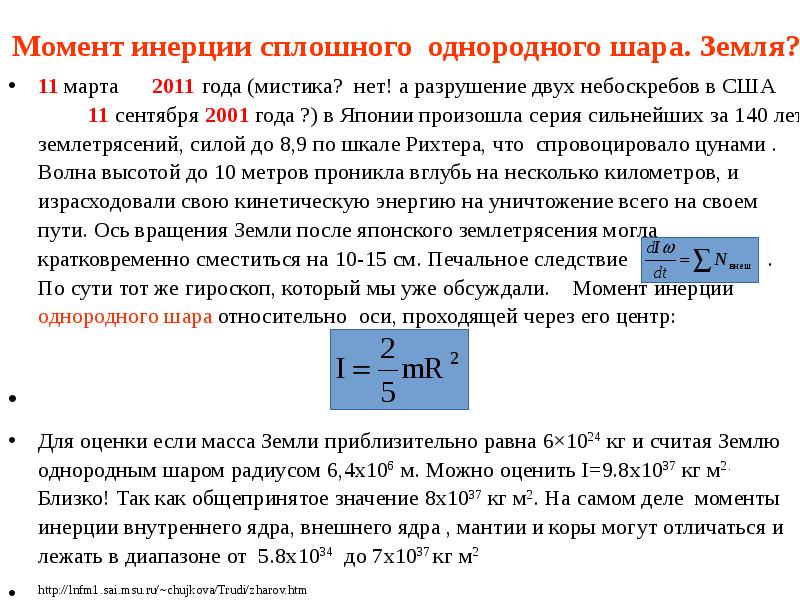
, т. С(0,0,0)
где R – радиус основания, h – высота конуса.
Напомним, что cos 2 a + cos 2 b + cos 2 g = 1. Наконец, если ось О не проходит через центр масс, то момент инерции тела может быть вычислен с помощью теоремы Гюйгенса Штейнера
I о = I с + md 2 , (**)
где I о – момент инерции тела относительно произвольной оси, I с – момент инерции относительно параллельной ей оси, проходящей через центр масс,
m – масса тела, d – расстояние между осями.
Процедура вычисления моментов инерции для тел стандартной формы относительно произвольной оси сводится к следующему.
Тела относительно какой-либо оси можно найти вычислением. Если вещество в теле распределено непрерывно, то вычисление момента инерции его сводится к вычислению интеграла
в котором r – расстояние от элемента массы dm до оси вращения.
Момент инерции тонкого однородного стержня относительно перпендикулярной оси. Пусть ось проходит через конец стержня А (рис. 4.4).
Пусть ось проходит через конец стержня А (рис. 4.4).
Для момента инерции можно написать I A = kml 2 , где l – длина стержня, k – коэффициент пропорциональности. Центр стержня С является его центром масс. По теореме Штейнера I A = I C + m (l /2) 2 . Величину I C можно представить как сумму моментов инерции двух стержней, СА и СВ , длина каждого из которых равна l /2, масса m /2, а следовательно, момент инерции равен Таким образом, I C = km (l/ 2) 2 . Подставляя эти выражения в формулу для теоремы Штейнера, получим
,
откуда k = 1/3. В результате находим
(4.16)
Момент инерции бесконечно тонкого круглого кольца (окружности). Момент инерции относительно оси Z (рис. 4.5) равен
I Z = mR 2 , (4.17)
где R – радиус кольца. Ввиду симметрии I X = I У .
Формула (4.17) очевидно, дает также момент инерции полого однородного цилиндра с бесконечно тонкими стенками относительно его геометрической оси.
Рис. 4.5 Рис. 4.6
Момент инерции бесконечно тонкого диска и сплошного цилиндра. Предполагается, что диск и цилиндр однородны, т. е. вещество распределено в них с постоянной плотностью. Пусть ось Z проходит через центр диска С перпендикулярно к его плоскости (рис. 4.6). Рассмотрим бесконечно тонкое кольцо с внутренним радиусом r и наружным радиусом r + dr . Площадь такого кольца dS = 2 prdr . Его момент инерции найдется по формуле (4.17), он равен dI z = r 2 dm. Момент инерции всего диска определяется интегралом Ввиду однородности диска dm = , где S = pR 2 – площадь всего диска. Вводя это выражение под знак интеграла, получим
(4.18)
Формула (4.18) дает также момент инерции однородного сплошного цилиндра относительно его продольной геометрической оси.
Вычисление момента инерции тела относительно оси часто можно упростить, вычислив предварительно момент инерции его относительно точки . Сам по себе момент инерции тела относительно точки не играет никакой роли в динамике. Он является чисто вспомогательным понятием, служащим для упрощения вычислений. Моментом инерции тела относительно точки О называется сумма произведений масс материальных точек, из которых тело состоит, на квадраты их расстояний R до точки О : q = ΣmR 2 . В случае непрерывного распределения масс эта сумма сводится к интегралу q = ∫R 2 dm . Само собой понятно, что момент θ не следует смешивать с моментом инерции I относительно оси. В случае момента I массы dm умножаются на квадраты расстояний до этой оси, а в случае момента θ – до неподвижной точки.
Рассмотрим сначала одну материальную точку с массой m и с координатами x , у , z относительно прямоугольной системы координат (рис. 4.7). Квадраты расстояний ее до координатных осей Х , Y , Z равны соответственно у 2 + z 2 , z 2 + x 2 , x 2 + у 2 , а моменты инерции относительно тех же осей
I X = m (y 2 + z 2), I У = m (z 2 + x 2),
I Z = m (x 2 + y 2).
Сложим эти три равенства, получим I X + I У + I Z = 2m (x 2 + у 2 + z 2).
Но х 2 + у 2 + z 2 = R 2 , где R – расстояние точки m от начала координат О. Поэтому
I X + I У + I Z = 2θ. (4.19)
Это соотношение справедливо не только для одной материальной точки, но и для произвольного тела, так как тело можно рассматривать как совокупность материальных точек. Таким образом, сумма моментов инерции тела относительно трех взаимно перпендикулярных осей, пересекающихся в одной точке О, равна удвоенному моменту инерции того же тела относительно этой точки.
Момент инерции полого шара с бесконечно тонкими стенками .
Сначала найдем момент инерции θ относительно центра шара. Очевидно, он равен θ = mR 2 . Затем применяем формулу (4.19). Полагая в ней ввиду симметрии I X = I Y = I Z = I. В результате находим момент инерции полого шара относительно его диаметра
Рассмотрим теперь проблему определения момента инерции различных тел. Общая формула для нахождения момента инерции объекта относительно оси имеет вид
,
Иными словами, нужно сложить все массы, умножив каждую из них на квадрат ее расстояния до оси . Заметьте, что это верно даже для трехмерного тела, несмотря на то, что расстояние имеет такой «двумерный вид». Впрочем, в большинстве случаев мы будем ограничиваться двумерными телами.
В качестве простого примера рассмотрим стержень, вращающийся относительно оси, проходящей через его конец и перпендикулярной к нему (фиг. 19.3). Нам нужно просуммировать теперь все массы, умноженные на квадраты расстояния (в этом случае все – нулевые). Под суммой, разумеется, я имею в виду интеграл от , умноженный на «элементики» массы. Если мы разделим стержень на кусочки длиной , то соответствующий элемент массы будет пропорционален , а если бы составляло длину всего стержня, то его масса была бы равна . Поэтому
. (19.5)
Размерность момента инерции всегда равна массе, умноженной на квадрат длины, так что единственная существенная величина, которую мы вычислили, это множитель .
Фиг. 19.3. Прямой стержень, вращающийся вокруг оси, проходящей черед один из его концов.
А чему будет равен момент инерции , если ось вращения проходит через середину стержня? Чтобы найти его, нам снова нужно взять интеграл, но уже в пределах от до . Заметим, однако, одну особенность этого случая. Такой стержень с проходящей через центр осью можно представлять себе как два стержня с осью, проходящей через конец, причем масса каждого из них равна , а длина равна . Моменты инерции двух таких стержней равны друг другу и вычисляются по формуле (19.5). Поэтому момент инерции всего стержня равен
. (19.6)
Таким образом, стержень гораздо легче крутить за середину, чем за конец.
Можно, конечно, продолжить вычисление моментов инерции других интересующих нас тел. Но поскольку такие расчеты требуют большого опыта в вычислении интегралов (что очень важно само по себе), они как таковые не представляют для нас большого интереса. Впрочем, здесь имеются некоторые очень интересные и полезные теоремы. Пусть имеется какое-то тело и мы хотим узнать его момент инерции относительно какой-то оси. Это означает, что мы хотим найти его инертность при вращении вокруг этой оси. Если мы будем двигать тело за стержень, подпирающий его центр масс так, чтобы оно не поворачивалось при вращении вокруг оси (в этом случае на него не действуют никакие моменты сил инерции, поэтому тело не будет поворачиваться, когда мы начнем двигать его), то для того, чтобы повернуть его, понадобится точно такая же сила, как если бы вся масса была сосредоточена в центре масс и момент инерции был бы просто равен , где – расстояние от центра масс до оси вращения. Однако формула эта, разумеется, неверна. Она не дает правильного момента инерции тела. Ведь в действительности при повороте тело вращается. Крутится не только центр масс (что давало бы величину ), само тело тоже должно поворачиваться относительно центра масс. Таким образом, к моменту инерции нужно добавить – момент инерции относительно центра масс. Правильный ответ состоит в том, что момент инерции относительно любой оси равен
Эта теорема называется теоремой о параллельном переносе оси. Доказывается она очень легко. Момент инерции относительно любой оси равен сумме масс, умноженных на сумму квадратов и , т. е. . Мы сейчас сосредоточим наше внимание на , однако все в точности можно повторить и для . Пусть координата есть расстояние данной частной точки от начала координат; посмотрим, однако, как все изменится, если мы будем измерять расстояние от центра масс вместо от начала координат. Чтобы это выяснить, мы должны написать
Возводя это выражение в квадрат, находим
.
Что получится, если умножить его на и просуммировать по всем ? Вынося постоянные величины за знак суммирования, находим
.
Третью сумму подсчитать легко; это просто . Второй член состоит из двух сомножителей, один из которых ; он равен -координате центра масс. Но это должно быть равно нулю, ведь отсчитывается от центра масс, а в этой системе координат среднее положение всех частиц, взвешенное их массами, равно нулю. Первый же член, очевидно, представляет собой часть от . Таким образом, мы и приходим к формуле (19.7).
Давайте проверим формулу (19.7) на одном примере. Просто проверим, будет ли она применима для стержня. Мы уже нашли, что момент инерции стержня относительно его конца должен быть равен . А центр масс стержня, разумеется, находится на расстоянии . Таким образом, мы должны получить, что . Так как одна четвертая + одна двенадцатая = одной третьей, то мы не сделали никакой грубой ошибки.
Кстати, чтобы найти момент инерции (19.5), вовсе не обязательно вычислять интеграл. Можно просто предположить, что он равен величине , умноженной на некоторый неизвестный коэффициент . После этого можно использовать рассуждения о двух половинках и для момента инерции (19.6) получить коэффициент . Используя теперь теорему о параллельном переносе оси, докажем, что , откуда . Всегда можно найти какой-нибудь окольный путь!
При применении теоремы о параллельных осях важно помнить, что ось должна быть параллельна оси, относительно которой мы хотим вычислять момент инерции.
Стоит, пожалуй, упомянуть еще об одном свойстве, которое часто бывает очень полезно при нахождении момента инерции некоторых типов тел. Оно состоит в следующем: если у нас есть плоская фигура и тройка координатных осей с началом координат, расположенным в этой плоскости, и осью , направленной перпендикулярно к ней, то момент инерции этой фигуры относительно оси равен сумме моментов инерции относительно осей и . Доказывается это совсем просто. Заметим, что
(поскольку все ). Аналогично,
,
Момент инерции однородной прямоугольной пластинки, например с массой , шириной и длиной относительно оси, перпендикулярной к ней и проходящей через ее центр, равен просто
,
поскольку момент инерции относительно оси, лежащей в плоскости пластинки и параллельной ее длине, равен , т. е. точно такой же, как и для стержня длиной , а момент инерции относительно другой оси в той же плоскости равен , такой же, как и для стержня длиной .
Итак, перечислим свойства момента инерции относительно данной оси, которую мы назовем осью :
1. Момент инерции равен
.
2. Если предмет состоит из нескольких частей, причем момент инерции каждой из них известен, то полный момент инерции равен сумме моментов инерции этих частей.
3. Момент инерции относительно любой данной оси равен моменту инерции относительно параллельной оси, проходящей через центр масс, плюс произведение полной массы на квадрат расстояния данной оси от центра масс.
4. Момент инерции плоской фигуры относительно оси, перпендикулярной к ее плоскости, равен сумме моментов инерций относительно любых двух других взаимно перпендикулярных осей, лежащих в плоскости фигуры и пересекающихся с перпендикулярной осью.
В табл. 19.1 приведены моменты инерции некоторых элементарных фигур, имеющих однородную плотность масс, а в табл. 19.2 – моменты инерции некоторых фигур, которые могут быть получены из табл. 19.1 с использованием перечисленных выше свойств.
Таблица 19.1 Простые примеры моментов инерции
Тонкий стержень длиной | Проходит через центр перпендикулярно к стержню | |
Тонкое концентрическое кольцо с радиусами и | Проходит через центр кольца перпендикулярно к плоскости кольца | |
Сфера радиуса | Проходит через центр |
Таблица 19.2 Моменты инерции, полученные из табл. 19.1
Прямоугольник со сторонами и Прямоугольный параллелепипед со сторонами Проходит через центр параллельно |
Момент инерции
Для вычисления момента инерции мы должны мысленно расчленить тело на достаточно малые элементы, точки которых можно считать лежащими на одинаковом расстоянии от оси вращения, затем найти произведение массы каждого элемента на квадрат его расстояния от оси и, наконец, просуммировать все полученные произведения. Очевидно, это весьма трудоемкая задача. Для подсчета
моментов инерции тел правильной геометрической формы можно воспользоваться в ряде случаев приемами интегрального исчисления.
Нахождение конечной суммы моментов инерции элементов тела заменим суммированием бесконечно большого числа моментов инерции, вычисленных для бесконечно малых элементов:
lim i = 1 ∞ ΣΔm i r i 2 = ∫r 2 dm . (при Δm → 0) .
Вычислим момент инерции однородного диска или сплошного цилиндра высотой h относительно его оси симметрии
Расчленим диск на элементы в виде тонких концентрических колец с центрами на оси его симметрии. Полученные кольца имеют внутренний диаметр r и внешний r + dr , а высоту h . Так как dr , то можем считать, что расстояние всех точек кольца от оси равно r .
Для каждого отдельно взятого кольца момент инерции
i = ΣΔmr 2 = r 2 ΣΔm ,
где ΣΔm − масса всего кольца.
Объем кольца 2πrhdr . Если плотность материала диска ρ , то масса кольца
ρ2πrhdr .
Момент инерции кольца
i = 2πρhr 3 dr .
Чтобы подсчитать момент инерции всего диска, надо просуммировать моменты инерции колец от центра диска (r = 0 ) до края его (r = R ), т. е. вычислить интеграл:
I = 2πρh 0 R ∫r 3 dr ,
или
I = (1/2)πρhR 4 .
Но масса диска m = ρπhR 2 , следовательно,
I = (1/2)mR 2 .
Приведем (без вычисления) моменты инерции для некоторых тел правильной геометрической формы, выполненных из однородных материалов
1. Момент инерции тонкого кольца относительно оси, проходящей через его центр перпендикулярно его плоскости (или тонкостенного полого цилиндра относительно его оси симметрии):
I = mR 2 .
2. Момент инерции толстостенного цилиндра относительно оси симметрии:
I = (1/2)m(R 1 2 − R 2 2)
где R 1 − внутренний и R 2 − внешний радиусы.
3. Момент инерции диска относительно оси, совпадающей с одним из его диаметров:
I = (1/4)mR 2 .
4. Момент инерции сплошного цилиндра относительно оси, перпендикулярной к образующей и проходящей через ее середину:
I = m(R 2 /4 + h 2 /12)
где R − радиус основания цилиндра, h − высота цилиндра.
5. Момент инерции тонкого стержня относительно оси, проходящей через его середину:
I = (1/12)ml 2 ,
где l − длина стержня.
6. Момент инерции тонкого стержня относительно оси, проходящей через один из его концов:
I = (1/3)ml 2
7. Момент инерции шара относительно оси, совпадающей с одним из его диаметров:
I = (2/5)mR 2 .
Если известен момент инерции какого-либо тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой оси, параллельной первой, может быть найден на основании так называемой теоремы Гюйгенса-Штейнера.
Момент инерции тела I относительно любой оси равен моменту инерции тела I с относительно оси, параллельной данной и проходящей через центр масс тела, плюс масса тела m , умноженная на квадрат расстояния l между осями:
I = I c + ml 2 .
В качестве примера подсчитаем момент инерции шара радиуса R и массой m , подвешенного на нити длиной l, относительно оси, проходящей через точку подвеса О . Масса нити мала по сравнению с массой шара. Так как момент инерции шара относительно оси, проходящей через центр масс I c = (2/5)mR 2 , а расстояние
между осями (l + R ), то момент инерции относительно оси, проходящей через точку подвеса:
I = (2/5)mR 2 + m(l + R) 2 .
Размерность момента инерции:
[I] = [m] × = ML 2 .
Тематические материалы:
Обновлено: 29.09.2019
103583
Если заметили ошибку, выделите фрагмент текста и нажмите Ctrl+Enter
, представляющее твердую инерцию – MATLAB и Simulink
Представление инерции
Инерция – это базовый атрибут всего, что вы могли бы истолковать как тело. Это сопротивление изменению состояния движения, и, что то же самое, мера силы или крутящего момента, необходимых для вызова определенного ускорения. В отличие от других твердых атрибутов, таких как геометрия или цвет, он строго требуется для моделирования модели. В частности, концы шарнир – его рамы – каждый должен подключаться к инерции, которая означает, что там, где движение разрешено, должна существовать инерция для приложенная сила или крутящий момент, на которые нужно воздействовать.
Вы можете смоделировать инерционный элемент изолированно, без намерения представляют собой тело. Такие инерции полезны, например, при моделировании вибрации, вызванные комком грязи на вращающемся автомобильном колесе. В комок отделен от корпуса колеса, и вы можете смоделировать его как таковой. В кроме того, его геометрия и цвет в этом случае являются тривиальными деталями, и вы можно не принимать во внимание их при моделировании. Тем самым вы лечите комок как простая инерция, лишенная каких-либо атрибутов, кроме инерции.
Изолированная простая инерция в модели встречается нечасто. Как правило, вы учитываете инерцию в курс моделирования всего тела – чего-то с геометрией и цветом, как крыло в механизме машущего крыла, обсуждаемом в разделе «Моделирование тел». Вы начинаете с представления о теле, смоделировать это тело как набор твердых тел и указать атрибуты эти твердые тела, чтобы получить полное представление о теле. Твердые тела вещи, которые вы моделируете, а инерция – лишь один из их атрибутов.
Корпус (1) и простая инерция (2)
Соответствующие блоки
Вы добавляете инерцию к модели, используя блоки из библиотеки Body Elements. Соответствующие блоки включают твердые блоки, инерцию и блоки из подбиблиотеки переменной массы. Вы можете смоделировать полное твердое тело или простую инерцию. Любой может исправить или переменные инерционные параметры, хотя точная параметризация, и поэтому тип твердого или инерционного зависит от блока.Срок «Твердое тело» используется здесь для обозначения элемента, атрибуты которого выходят за рамки просто инерция и термин «инерция», когда он используется для обозначения элемента, тот, чьи атрибуты включают только инерцию.
Фиксированные твердые тела. Используйте твердотельные блоки при моделировании твердых тел и тел, которые они включать. Эти блоки позволяют указать геометрию и цвет, ключ атрибуты, если для вас важна надежная визуализация. Они тоже позволяют иметь менее доступные параметры ротационного инерция автоматически вычисляется из твердотельной геометрии и либо масса или массовая плотность.Даже в тех случаях, когда геометрия и цвет лишние детали, массивные блоки часто оказываются наиболее удобными средство задания инерции. Обратите внимание, что геометрия и инерция параметры массивных блоков строго постоянны. Моделировать solids с любым атрибутом переменной, вы должны использовать блоки из подбиблиотека переменной массы.
Переменные твердые тела. Используйте твердые блоки в Body Elements> Variable Mass library для моделирования полных твердых тел с переменными параметрами инерции, такими как масса и размеры, зависящие от инерции, такие как длина и радиус, которые могут динамически изменяться в зависимости от инерционных входов.Блокирует, что представляют собой твердые тела, идентифицируются как таковые с помощью слова Твердые в их названиях, например, Переменный цилиндрический полнотелый и переменный полнотелый кирпич. Эти блоки отличаются от сплошные блоки в родительской библиотеке в этой одной или нескольких инерционных параметры могут изменяться, а из Общей переменной Блок массы в том смысле, что они обладают геометрией и цвет.
Фиксированные инерции. Используйте блок Inertia как средства регулировки инерции твердого тела или тела.Геометрия и Цвет считается неактуальным для моделирования. Вы можете вычесть массу, чтобы учесть наличие полой области, например, пустой отсек в сосуде, изначально смоделированном без один. Вы также можете добавить массу, чтобы учесть наличие мелких беспорядки, такие как комки грязи, которые иногда остаются на автомобильное колесо. Обратите внимание, что вы можете внести те же изменения, иногда более интуитивно, используя более сложные твердотельные блоки.
Переменная инерция. Зарезервировать общую переменную массу блок для особых случаев, когда масса, центр масс или тензор инерции должен измениться в ответ на некоторый ввод – часто просто время сама – без предположений о твердой геометрии. Вы можете моделируйте такие события, как захват груза экскаватором (пример переменной массы), перемещение пассажира на подъемнике ( пример переменного центра масс), и колебания жидкости груз, содержащийся в автоцистерне (пример переменной инерции тензор).
Параметры инерции
Цельные блоки имеют доступ к геометрическим данным и, следовательно, могут рассчитывать инерционные параметры при заданной форме и массе. Эта особенность очень уменьшает количество параметров, которые вы должны указать в модели. Автоматический расчет инерции всегда включен в сплошных блоках, таких как Кирпич Твердое и цилиндрическое твердое тело. По умолчанию он включен в сплошные блоки, означающие, что вы можете изменить этот параметр.
Вы также можете явно указать параметры инерции, например, чтобы точно зафиксировать инерцию тела, геометрия которого у вас только приблизительная.Примером может служить звено необычной формы, например типичное для экскаватора-погрузчика. стрелу экскаватора, которую вы аппроксимировали с помощью простого Кирпич сплошной блочной формы. Твердый геометрия в этом случае не очень точна, и вы можете указать параметры инерции с использованием данных САПР (или других).
Если вы выберете явное указание инерции, есть два
параметризации, которые вы можете использовать. Один позволяет лечить твердое тело
или инерция как точечная масса: точечная масса параметризация.Другой позволяет рассматривать твердое тело или инерцию как
распределенная масса: Custom параметризация. Вы можете выбрать вариант, наиболее подходящий для вашего
приложение, используя раскрывающийся список>.
Обратите внимание, что Точечная масса и Доступны нестандартные параметризации
только в тех блоках, которые поддерживают явную спецификацию инерции.
Переменные твердотельные блоки в библиотеке Body Elements> Variable Mass
тоже не предоставляем.В этих блоках центр масс и инерции
тензор строго ограничены геометрией и плотностью твердого тела, а
по этой причине всегда автоматически рассчитываются во время
моделирование.
Точечная масса Приближение. Точечная масса – это приближение, единственное инерциальное
параметры центра масс и общей массы – мера
поступательная инерция и, следовательно, сопротивление внезапному
изменение поступательной скорости.Предполагается инерция вращения.
незначительно и игнорируется. Расположение центра масс может
варьируются в зависимости от происхождения локальной системы отсчета.
Пользовательские Массовые распределения. Распределенная масса – это более общее представление об инерции. Это
имеет среди своих инерционных параметров не только полную массу и центр
массы, но также моменты инерции и произведения инерции.
Моменты и продукты инерции составляют то, что известно как
тензор или матрица инерции.Вместе этих параметров достаточно, чтобы
полностью описать с точки зрения многотельного моделирования
распределение массы в пространстве.
Примечание о совместных соединениях. Соблюдайте осторожность при подключении инерции с нулевым моментом инерции, такие как точечные массы, к соединениям с угловыми градусами свобода – те, которые состоят, по крайней мере, частично из революционных или сферических совместные примитивы. Суммарный момент инерции относительно оси вращения шарнира должны быть ненулевыми с каждой стороны.В Причина этого проста: угловое ускорение относительно оси становится бесконечным независимо от приложенного крутящего момента, если момент инерция относительно этой оси равна нулю. Такое поведение не является физическим и запрещено в модели.
контрольных кадров
Блоки в библиотеке Body Elements имеют порты контрольных кадров, которые вы подключаетесь, чтобы разрешить размещение соответствующих элементов – твердых тел, инерции – в контексте модели. Референсные системы представляют собой жесткую часть этих элементов и естественно двигаться вместе с ними как единое целое.Они есть используется, прямо или косвенно, для определения инерции, а в твердых телах – геометрии элементов.
Если концепция кадра вам чужда, см. Работа с кадрами. Вкратце, каркас – это триада осей. очень похоже на декартову систему координат. У него есть позиция и ориентацию, которую вы можете определить с помощью интерфейса создания кадра Твердый блок или параметры Твердого Блок преобразования. Все позиции и ориентации в модель – твердых тел, инерций, соединений и связей, сил и моментов, датчики – определяются через фреймы.
Система отсчета Solid
Опции визуализации
В модели можно визуализировать твердые тела и инерции. Тип получаемая вами визуализация зависит от используемого вами блока. Твердый блоки, в том числе из библиотеки Body Elements> Variable Mass, позволяют визуализировать соответствующие элементы с помощью геометрии что вы укажете. Вы также можете визуализировать твердое тело с помощью простого графический маркер, такой как сфера, например, чтобы выделить его положение в случаях, когда известно, что геометрия неточна.
Inertias не имеет геометрии и цвета и, естественно, не поддерживает основанные на геометрии визуализация. Вы должны визуализировать такие элементы, используя альтернативные средства. Если элемент связан с общей переменной Массовый блок, можно использовать те же графические маркеры в твердых блоках или эквивалентном эллипсоиде инерции – форма размеры которых напрямую зависят от инерционных параметров, которые вы указать. Если элемент связан с Блок инерции можно использовать маркеры сплошных блоков или значок инерции.
Для получения дополнительной информации о визуализации см. Визуализация модели и ее компонентов.
Упражнение: добавление инерции к модели
Добавьте плоскую фиксированную инерцию к модели с двумя маятниками, расположите ее на
свободный конец внешнего звена и установите его массу 25 г с помощью Точечная масса параметрирование:
В командной строке MATLAB введите Астрахань
. Модель двойной маятник открывается.В нем три подсистемы Simulink блоки, каждый из которых представляет тело. Сохраните модель под другое имя в удобной папке.Из библиотеки Body Elements добавьте Блок инерции и подключите его порт опорного кадра (обозначенный R ) к крайнему правому порту кадра
Binary Link A1блок. Рама связанный с этим портом расположен на свободном конце двойной маятник.В диалоговом окне блока инерции установите для параметра Масса значение
25 г- значение примерно соответствует четверти массы двоичной связи (130 г).ТочкаМассовая параметризацияв этом блоке позволяет игнорировать параметры инерции вращения.Смоделируйте модель. Обозреватель механики открывается с динамическим визуализация вашего обновленного двойного маятника. Обратите внимание на Значок инерции, используемый для обозначения местоположения вашей инерции элемент.
См. «Попробуйте: укажите пользовательскую инерцию» для примера, показывающего как указать параметры Custom inertia.
Составление твердых тел и инерции
По мере того, как твердые формы становятся сложнее, параметры инерции становятся все более громоздко указать, и вам может лучше подойти другой подход: компаундирование. Вы можете представить себе сложное твердое тело или инерцию как коллекцию. более простых элементов и явно указать их параметры инерции, если с помощью инерции или общего Блок переменной массы или настройте их для автоматического расчет, если используется цельный блок.
При жестком соединении более простых элементов - через соединительные линии каркаса. и, при необходимости, блоки Rigid Transform - вы получить агрегат, чьи инерционные свойства отражают свойства сложного твердые или инерционные, которые вы намеревались представить. Бинарная ссылка, показанная в рисунок служит примером. Вы можете разделить ссылку на три раздела, представлять каждую секцию отдельным блоком и подключать соответствующие системы отсчета с использованием соответствующих жестких преобразований.
В качестве примера, показывающего, как указать геометрию двоичной связи посредством сложения, см. «Попытка: создание составной геометрии».
Отрицательная инерция как вычитание
В среде Simscape Multibody нет требования, чтобы инерционные параметры должны быть положительными. Сюда входят масса и моменты инерция, оба параметра, которые в физическом мире строго положительный. Отрицательная инерция позволяет моделировать составную инерцию с помощью полые секции путем вычитания и поэтому полезны в некоторых модели.
Двоичная ссылка снова служит примером. Вы можете представить ссылку как единое целое без отверстий, используя один блок, и вычтите из его завершает инерцию отверстий с помощью дополнительных блоков. Как и раньше, ты должен использовать жесткие преобразования, чтобы правильно позиционировать ссылку инерции кадры относительно друг друга.
Пример, показывающий, как задать инерцию путем сложения, см. В разделе «Упражнение: создание составной инерции».
Единый сплошной блок имеет массу 33.8 кг и длина кромки a = 0,955 м, b = 1,47 м и c = 0,0920 м. Вычислите его инерцию вращения вокруг оси, проходящей через один угол и перпендикулярной большим граням.
Вопрос:
Сплошной однородный блок имеет массу 33,8 кг и длину кромки a = 0,955 м, b = 1,47 м и c = 0,0920 м. Вычислите его инерцию вращения вокруг оси, проходящей через один угол и перпендикулярной большим граням.
Момент инерции:
Рассмотрим тело, вращающееся вокруг своей оси с определенной скоростью.Затем тело испытывает крутящий момент, противодействующий его вращению. Это противостояние - момент инерции тела. Ось, вдоль которой он вращается, может быть внутренней или внешней и не может быть закреплена.
Ответ и пояснение: 1
Дано
- Масса блока, {eq} m = 33,8 \; {\ rm {kg}}. {/ eq}
- Длина кромок, {eq} a = 0,995 \; {\ rm {m}} {/ eq}, {eq} b = 1,47 \; {\ rm {m}} {/ eq} и {eq} c = 0.2}. {/ eq}
СЕКЦИОННЫЕ СВОЙСТВА БЕТОННЫХ КЛАДНЫХ СТЕН
СВОЙСТВА РАЗДЕЛА
Таблицы с 1 по 13 суммируют характеристики сечения залитых и незаращенных 4-, 6-, 8-, 10-, 12-, 14- и 16-дюймовых. (102-, 152-, 203-, 254-, 305-, 356- и 406-мм) широкие бетонные стены из кирпича, из расчета:
- Стандартные размеры блока
- основаны на минимальных требованиях к толщине облицовки и толщины стенки Стандартных технических условий для несущих бетонных блоков, ASTM C90-06 (исх.4), как показано на рисунке 1, за исключением случаев, указанных в таблицах с 8 по 13. Обратите внимание, что до ASTM C90-06, две минимальные толщины лицевой оболочки для блоков 10 дюймов. (254 мм) и шире. С введением ASTM C90-06 две толщины лицевой оболочки были заменены одним требованием минимальной толщины (1¼ дюйма (32 мм)). См. Ссылку 5 для получения дополнительной информации. Таблицы с 10 по 13 могут использоваться для определения свойств сечения единиц, соответствующих предыдущим редакциям ASTM C90.
- , номинальные размеры торца всех агрегатов - 16 дюймов.в длину на 8 дюймов в высоту (406 на 203 мм),
- все швы имеют толщину дюйма (9,5 мм),
- все стыки раствора имеют ту же глубину, что и толщина лицевой оболочки или стенки, на которой они размещены,
- для кирпичной кладки без заделки и с частичным заполнением швов, все блоки имеют симметричное поперечное сечение, квадратные концы и две сердцевины (за исключением архитектурных особенностей, таких как насечки, ребра и разделенные поверхности). Обратите внимание, что перечисленные свойства секции могут быть консервативно применены к модулям с открытым концом (см. Рисунок 2), которые либо частично залиты, либо залиты сплошным раствором, поскольку по коду ячейки с открытым концом должны быть залиты раствором.
Таблицы включают как чистые, так и средние свойства. Свойства чистого сечения ( A n , I n и S n ) рассчитываются на основе минимальной чистой площади поперечного сечения сборки. Эти значения относятся к критическому сечению при определении напряжений из-за приложенной нагрузки (ссылки 6, 7). Средние характеристики сечения ( A avg , I avg , S avg и r avg ) соответствуют средней площади поперечного сечения сборки и используются для определения жесткости или прогиб из-за приложенной нагрузки (см.6, 7).
Чистые и средние свойства горизонтального сечения перечислены в таблицах 1a, 2a и т. Д., В то время как свойства вертикального сечения перечислены в таблицах 1b, 2b и т.д. плоскость кладки (ось ХХ на рисунке 3). Для горизонтально перекрывающих стен свойства вертикального сечения рассчитываются по вертикальной оси, параллельной плоскости кладки (ось Y-Y на рисунке 3).
В дополнение к свойствам сечения, основанным на стандартных размерах блока, показанных на рис. 1, в таблицах 8 и 9 перечислены свойства сечений стен, построенных с использованием 8-дюймовых.(203-мм) агрегаты с утолщенными торцевыми оболочками. Эти блоки часто указываются для достижения более высоких показателей пожарной безопасности. В Таблице 10 перечислены свойства сечения стен, построенных с использованием 10-дюйм. (254 мм) блоки с торцевыми панелями 1⅜ дюйма (35 мм), минимум, необходимый до ASTM C90-06. Точно так же в таблицах 11, 12 и 13 перечислены свойства сечения стен, построенных с использованием 12, 14 и 16 дюймов. (305-, 356- и 406-мм) соответственно с торцевыми панелями диаметром 1½ дюйма (38 мм).
Рисунок 1 - Заданные размеры блока и минимальная толщина лицевой поверхности и стенки (см.4) Рисунок 2 - Открытые блокиМЕТРИЧЕСКИЕ КОНВЕРСИИ:
дюйма x 25,4 = мм
Таблица 1–4 дюйма (102 мм) одинарных витых стенок, ¾ дюйма(19 мм) Торцевые части (стандарт) (C) Таблица 2 - 6-дюймовые (152-миллиметровые) стенки с одинарным витком, 1 дюйм (25 мм) торцевые кожухи (стандарт) Таблица 3 - 8-дюймовые (203-миллиметровые) стенки с одинарной перемычкой, торцевые кожухи 1¼ (32 мм) (стандарт) Таблица 4 - 10-дюймовые (254-мм) перегородки с одинарной перемычкой, 1¼ дюйм.(32 мм) Торцевые части (стандарт)
дюйм² / фут x 2117 = мм² / м
дюйм³ / фут x 53,763 = мм³ / м
дюйм 4 / фут x 1,365,588 = мм 4 / мA Чистые характеристики поперечного сечения, определенные для вертикальной плоскости, которая совпадает с торцевыми поверхностями агрегатов. Характеристики чистого поперечного сечения должны использоваться для определения напряжения и деформации, возникающих в результате приложения нагрузки.
Таблица 5–12-дюймовые (305-мм) стенки с одинарным витком, торцевые кожухи 1¼ (32 мм) (стандарт) Таблица 6 - 14 дюймов (356 мм) одинарных витых стенок, 1¼ дюйма(32 мм) Торцевые части (стандарт) Таблица 7–16-дюймовые (406-мм) стенки с одинарной виткой, торцевые кожухи 1¼ (32 мм) (стандарт) Таблица 8 - 8-дюймовые (203-мм) одинарные стенки, 2 дюйма (51 мм) торцевые оболочки (нестандартные) Таблица 9 - 8-дюймовые (203-мм) перегородки с одинарным витком, 1⅜ дюйма(35 мм) Торцевые части (нестандартные) Таблица 10 - 10-дюймовые (254-мм) стенки с одинарным витком, торцевые кожухи 1⅜ (35 мм) (нестандартные) Таблица 11 - одинарные стенки диаметром 12 дюймов (305 мм), торцевые кожухи 1½ дюйма (38 мм) (нестандартные) Таблица 12 - 14-дюймовые (356-миллиметровые) стенки с одинарным витком, 1½ дюйма.(38 мм) Торцевые части (нестандартные) Таблица 13–16 дюймов (406 мм) одинарных витых стенок, 1½ дюйма (38 мм) лицевых панелей (нестандартные) Рисунок 3 - Горизонтальные и вертикальные разрезы
B Средние характеристики поперечного сечения, определенные по двум вертикальным плоскостям, рассчитанные как среднее значение свойств сетки и твердого тела.Средние характеристики поперечного сечения должны использоваться для определения жесткости и прогиба элемента.
C Из-за небольшого размера сердцевины и, как следствие, трудности уплотнения раствора, 4 дюйма. (102-мм) блоки заделываются редко.ОБОЗНАЧЕНИЕ:
A avg = средняя площадь поперечного сечения кладки, дюйм.² (мм²).
A n = полезная площадь поперечного сечения кирпичной кладки, дюйм² (мм²).
I avg = момент инерции средней площади поперечного сечения кладки, дюймы 4 (мм 4 ).
I n = момент инерции чистой площади поперечного сечения кладки, дюймы 4 (мм 4 ).
r avg = радиус вращения средней площади поперечного сечения кладки, дюймы (мм).
S avg = модуль упругости средней площади поперечного сечения кирпичной кладки, дюйм.³ (мм³).
S n = модуль упругости чистой площади поперечного сечения кирпичной кладки, дюйм³ (мм³).Список литературы
- Расчет на допустимые напряжения бетонной кладки, ТЭК 14-7Б. Национальная ассоциация бетонщиков, 2009.
- Положения по расчету прочности бетонной кладки, TEK 14-4B. Национальная ассоциация бетонщиков, 2008.
- Конструкция бетонных стен после натяжения, TEK 14-20A.Национальная ассоциация бетонщиков, 2002.
- Стандартные технические условия для несущих бетонных блоков, ASTM C90-06. ASTM International, 2006.
- Спецификации ASTM для бетонных блоков, TEK 1-1F. Национальная ассоциация бетонщиков, 2012.
- Международный Строительный Кодекс 2003. Международный Совет Кодекса, 2003.
- Международный Строительный Кодекс 2006 г. Международный Совет Кодекса, 2006 г.
NCMA TEK 14-1B, редакция 2007 г.
NCMA и компании, распространяющие эту техническую информацию, не несут никакой ответственности за точность и применение информации, содержащейся в этой публикации.
5.6 Расчет центров масс и моментов инерции - том 3 исчисления
Цели обучения
- 5.6.1 Используйте двойные интегралы, чтобы найти центр масс двумерного объекта.
- 5.6.2 Используйте двойные интегралы, чтобы найти момент инерции двумерного объекта.
- 5.6.3 Используйте тройные интегралы, чтобы найти центр масс трехмерного объекта.
Мы уже обсудили несколько приложений множественных интегралов, таких как нахождение площадей, объемов и среднего значения функции в ограниченной области.В этом разделе мы разрабатываем вычислительные методы для определения центра масс и моментов инерции нескольких типов физических объектов, используя двойные интегралы для пластинки (плоской пластины) и тройные интегралы для трехмерного объекта с переменной плотностью. Плотность обычно считается постоянным числом, когда пластинка или объект однородны; то есть объект имеет однородную плотность.
Центр масс в двух измерениях
Центр масс также известен как центр тяжести, если объект находится в однородном гравитационном поле.Если объект имеет однородную плотность, центром масс является геометрический центр объекта, который называется центроидом. На рисунке 5.64 показана точка PP как центр масс пластинки. Пластина идеально сбалансирована относительно центра масс.
Фигура 5,64 Пластина идеально сбалансирована на шпинделе, если центр масс пластины находится на шпинделе.
Чтобы найти координаты центра масс P (x−, y−) P (x−, y−) пластинки, нам нужно найти момент MxMx пластинки относительно оси x оси x и момент MyMy об оси y.ось y. Еще нам нужно найти массу пластинки в миллиметрах. Тогда
x− = Mymandy− = Mxm.x− = Mymandy− = Mxm.См. Определения и методы однократного интегрирования для определения центра масс одномерного объекта (например, тонкого стержня) в разделе «Моменты и центры масс». Мы собираемся использовать здесь аналогичную идею, за исключением того, что объект представляет собой двумерную пластину, и мы используем двойной интеграл.
Если мы допускаем постоянную функцию плотности, то x− = Mymandy− = Mxmx− = Mymandy− = Mxm дает центроид пластинки.
Предположим, что пластинка занимает область RR в плоскости xy, плоскости xy, и пусть ρ (x, y) ρ (x, y) будет ее плотностью (в единицах массы на единицу площади) в любой точке (x , у). (х, у). Следовательно, ρ (x, y) = limΔA → 0ΔmΔA, ρ (x, y) = limΔA → 0ΔmΔA, где ΔmΔm и ΔAΔA - масса и площадь небольшого прямоугольника, содержащего точку (x, y) (x, y) и предел берется, поскольку размеры прямоугольника идут до 00 (см. следующий рисунок).
Фигура 5,65 Плотность пластинки в точке - это предел ее массы на площадь в небольшом прямоугольнике вокруг точки, когда площадь стремится к нулю.
Как и раньше, разделим область RR на крошечные прямоугольники RijRij с площадью ΔAΔA и выберем (xij *, yij *) (xij *, yij *) в качестве точек выборки. Тогда масса mijmij каждого RijRij равна ρ (xij *, yij *) ΔAρ (xij *, yij *) ΔA (рисунок 5.66). Пусть kk и ll - количество подынтервалов в xx и y, y соответственно. Также обратите внимание, что форма не всегда может быть прямоугольной, но ограничение все равно работает, как показано в предыдущих разделах.
Фигура 5,66 Разделение пластинки на крошечные прямоугольники Rij, Rij, каждый из которых содержит точку выборки (xij *, yij *).(xij *, yij *).Следовательно, масса пластинки
m = limk, l → ∞∑i = 1k∑j = 1lmij = limk, l → ∞∑i = 1k∑j = 1lρ (xij *, yij *) ΔA = ∬Rρ (x, y) dA.m = limk , l → ∞∑i = 1k∑j = 1lmij = limk, l → ∞∑i = 1k∑j = 1lρ (xij *, yij *) ΔA = ∬Rρ (x, y) dA.(5.13)
Давайте посмотрим на пример определения полной массы треугольной пластинки.
Пример 5,55
Определение полной массы пластинки
Рассмотрим треугольную пластину RR с вершинами (0,0), (0,3), (0,0), (0,3), (3,0) (3,0) и плотностью ρ (x, y ) = xy кг / м2.ρ (x, y) = xy кг / м2. Найдите общую массу.
Решение
Эскиз области RR всегда полезен, как показано на следующем рисунке.
Фигура 5,67 Пластинка в xy-planexy-плоскости с плотностью ρ (x, y) = xy.ρ (x, y) = xy.Используя полученное выражение для массы, мы видим, что
m = ∬Rdm = ∬Rρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xxydydx = ∫x = 0x = 3 [xy22 | y = 0y = 3 − x] dx = ∫x = 0x = 312x (3 − x) 2dx = [9x24 − x3 + x48] | x = 0x = 3 = 278.m = ∬Rdm = ∬Rρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xxydydx = ∫x = 0x = 3 [xy22 | y = 0y = 3 − x] dx = ∫x = 0x = 312x (3 − x) 2dx = [9x24 − x3 + x48] | x = 0x = 3 = 278.Вычисление несложное и дает ответ m = 278kg.m = 278kg.
Контрольно-пропускной пункт 5,33
Рассмотрим ту же область RR, что и в предыдущем примере, и используем функцию плотности ρ (x, y) = xy.ρ (x, y) = xy. Найдите общую массу. Подсказка: Используйте тригонометрическую замену x = 3sinθx = 3sinθ, а затем используйте формулы уменьшения степени для тригонометрических функций.
Теперь, когда мы установили выражение для массы, у нас есть инструменты, необходимые для вычисления моментов и центров масс.Момент MxMx вокруг оси x оси x для RR является пределом сумм моментов областей RijRij вокруг оси x. оси x. Следовательно,
Mx = limk, l → ∞∑i = 1k∑j = 1l (yij *) mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) ρ (xij *, yij *) ΔA = ∬Ryρ (x, y) dA.Mx = limk, l → ∞∑i = 1k∑j = 1l (yij *) mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) ρ (xij *, yij *) ΔA = ∬Ryρ (x, y) dA.(5.14)
Точно так же момент MyMy вокруг оси y для RR является пределом сумм моментов областей RijRij вокруг оси y.оси y. Следовательно,
My = limk, l → ∞∑i = 1k∑j = 1l (xij *) mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) ρ (xij *, yij *) ΔA = ∬Rxρ (x, y) dA.My = limk, l → ∞∑i = 1k∑j = 1l (xij *) mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) ρ (xij *, yij *) ΔA = ∬Rxρ (x, y) dA.(5.15)
Пример 5,56
В поисках моментов
Рассмотрим ту же треугольную пластину RR с вершинами (0,0), (0,3), (3,0) (0,0), (0,3), (3,0) и плотностью ρ (x, у) = ху. р (х, у) = ху. Найдите моменты MxMx и My.My.
Решение
Используйте двойные интегралы для каждого момента и вычислите их значения:
Mx = ∬Ryρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xxy2dydx = 8120, Mx = ∬Ryρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xxy2dydx = 8120, My = ∬Rxρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xx2ydydx = 8120.My = ∬Rxρ (x, y) dA = ∫x = 0x = 3∫y = 0y = 3 − xx2ydydx = 8120.Расчет довольно прост.
Контрольно-пропускной пункт 5,34
Рассмотрим ту же пластину RR, что и выше, и используем функцию плотности ρ (x, y) = xy.ρ (x, y) = xy. Найдите моменты MxMx и My.My.
Наконец, мы готовы переформулировать выражения для центра масс в терминах интегралов. Обозначим координату центра масс x через x − x− и координату y через y − .y−. В частности,
x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dAandy− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA.x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dAandy− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA.(5.16)
Пример 5,57
Нахождение центра масс
Снова рассмотрим ту же треугольную область RR с вершинами (0,0), (0,3), (0,0), (0,3), (3,0) (3,0) и с функцией плотности ρ ( х, у) = ху. р (х, у) = ху. Найдите центр масс.
Решение
По разработанным формулам имеем
x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dA = 81/2027/8 = 65, x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dA = 81/2027/8 = 65, y− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA = 81/2027/8 = 65.y− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA = 81/2027/8 = 65.Следовательно, центром масс является точка (65,65). (65,65).
Анализ
Если мы выберем плотность ρ (x, y) ρ (x, y) вместо однородной по всей области (т. Е. Постоянной), такой как значение 1 (подойдет любая константа), то мы можем вычислить центроид,
xc = Mym = ∬RxdA∬RdA = 9/29/2 = 1, yc = Mxm = ∬RydA∬RdA = 9/29/2 = 1. xc = Mym = ∬RxdA∬RdA = 9/29/2 = 1 , yc = Mxm = ∬RydA∬RdA = 9/29/2 = 1.Обратите внимание, что центр масс (65,65) (65,65) не совсем такой же, как центроид (1,1) (1,1) треугольной области.Это связано с переменной плотностью R.R. Если плотность постоянна, мы просто используем ρ (x, y) = cρ (x, y) = c (постоянная). Это значение исключается из формул, поэтому при постоянной плотности центр масс совпадает с центроидом пластинки.
Контрольно-пропускной пункт 5,35
Снова используйте ту же область RR, что и выше, и функцию плотности ρ (x, y) = xy.ρ (x, y) = xy. Найдите центр масс.
Еще раз, основываясь на комментариях в конце Примера 5.57, у нас есть выражения для центроида области на плоскости:
xc = Mym = ∬RxdA∬RdAandyc = Mxm∬RydA∬RdA.xc = Mym = ∬RxdA∬RdAandyc = Mxm∬RydA∬RdA.Мы должны использовать эти формулы и проверить центроид треугольной области RR, упомянутой в последних трех примерах.
Пример 5,58
Определение массы, моментов и центра масс
Найти массу, моменты и центр масс пластинки с плотностью ρ (x, y) = x + yρ (x, y) = x + y, занимающей область RR под кривой y = x2y = x2 в интервал 0≤x≤20≤x≤2 (см. следующий рисунок).
Фигура 5,68 Определение центра масс пластинки RR с плотностью ρ (x, y) = x + y.р (х, у) = х + у.Решение
Сначала мы вычисляем массу m.m. Нам нужно описать область между графиком y = x2y = x2 и вертикальными линиями x = 0x = 0 и x = 2: x = 2:
m = ∬Rdm = ∬Rρ (x, y) dA = ∫x = 0x = 2∫y = 0y = x2 (x + y) dydx = ∫x = 0x = 2 [xy + y22 | y = 0y = x2] dx = ∫x = 0x = 2 [x3 + x42] dx = [x44 + x510] | x = 0x = 2 = 365.m = ∬Rdm = ∬Rρ (x, y) dA = ∫x = 0x = 2∫ y = 0y = x2 (x + y) dydx = ∫x = 0x = 2 [xy + y22 | y = 0y = x2] dx = ∫x = 0x = 2 [x3 + x42] dx = [x44 + x510] | х = 0х = 2 = 365.Теперь вычислим моменты MxMx и My: My:
Mx = ∬Ryρ (x, y) dA = ∫x = 0x = 2∫y = 0y = x2y (x + y) dydx = 807, Mx = ∬Ryρ (x, y) dA = ∫x = 0x = 2∫ y = 0y = x2y (x + y) dydx = 807, My = ∬Rxρ (x, y) dA = ∫x = 0x = 2∫y = 0y = x2x (x + y) dydx = 17615.My = ∬Rxρ (x, y) dA = ∫x = 0x = 2∫y = 0y = x2x (x + y) dydx = 17615.Наконец, оцените центр масс,
x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dA = 176/1536/5 = 4427, y− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA = 80/736/5 = 10063. x− = Mym = ∬Rxρ (x, y) dA∬Rρ (x, y) dA = 176/1536/5 = 4427, y− = Mxm = ∬Ryρ (x, y) dA∬Rρ (x, y) dA = 80/736/5 = 10063.Следовательно, центр масс равен (x−, y -) = (4427,10063). (X−, y -) = (4427,10063).
Контрольно-пропускной пункт 5,36
Вычислите массу, моменты и центр масс области между кривыми y = xy = x и y = x2y = x2 с функцией плотности ρ (x, y) = xρ (x, y) = x в интервал 0≤x≤1.0≤x≤1.
Пример 5,59
В поисках центроида
Найдите центр тяжести области под кривой y = exy = ex на интервале 1≤x≤31≤x≤3 (см. Следующий рисунок).
Фигура 5,69 Нахождение центра тяжести области ниже кривой y = ex.y = ex.Решение
Чтобы вычислить центроид, мы предполагаем, что функция плотности постоянна и, следовательно, она сокращается:
xc = Mym = ∬RxdA∬RdAandyc = Mxm = ∬RydA∬RdA, xc = Mym = ∬RxdA∬RdA = ∫x = 1x = 3∫y = 0y = exxdydx∫x = 1x = 3∫y = 0y = exdydx = ∫x = 1x = 3xexdx∫x = 1x = 3exdx = 2e3e3 − e = 2e2e2−1, yc = Mxm = ∬RydA∬RdA = ∫x = 1x = 3∫y = 0y = exydydx∫x = 1x = 3∫y = 0y = exdydx = ∫x = 1x = 3e2x2dx∫x = 1x = 3exdx = 14e2 (e4−1) e (e2−1) = 14e (e2 + 1).xc = Mym = ∬RxdA∬RdAandyc = Mxm = ∬RydA∬RdA, xc = Mym = ∬RxdA∬RdA = ∫x = 1x = 3∫y = 0y = exxdydx∫x = 1x = 3∫y = 0y = exdydx = ∫x = 1x = 3xexdx∫x = 1x = 3exdx = 2e3e3 − e = 2e2e2−1, yc = Mxm = ∬RydA∬RdA = ∫x = 1x = 3∫y = 0y = exydydx∫x = 1x = 3∫y = 0y = exdydx = ∫x = 1x = 3e2x2dx∫x = 1x = 3exdx = 14e2 (e4−1) e (e2−1) = 14e (e2 + 1).Таким образом, центр тяжести области
(xc, yc) = (2e2e2−1,14e (e2 + 1)). (xc, yc) = (2e2e2−1,14e (e2 + 1)).Контрольно-пропускной пункт 5,37
Вычислить центр тяжести области между кривыми y = xy = x и y = xy = x с равномерной плотностью в интервале 0≤x≤1.0≤x≤1.
Моменты инерции
Для четкого понимания того, как рассчитывать моменты инерции с использованием двойных интегралов, нам нужно вернуться к общему определению моментов и центров масс в Разделе 6.6 Тома 1. Момент инерции частицы массой мм относительно ось mr2, mr2, где rr - расстояние частицы от оси. Из рисунка 5.66 видно, что момент инерции подпрямоугольника RijRij относительно оси x оси x равен (yij *) 2ρ (xij *, yij *) ΔA.(yij *) 2ρ (xij *, yij *) ΔA. Точно так же момент инерции подпрямоугольника RijRij относительно оси y равен (xij *) 2ρ (xij *, yij *) ΔA. (Xij *) 2ρ (xij *, yij *) ΔA. Момент инерции связан с вращением массы; в частности, он измеряет тенденцию массы сопротивляться изменению вращательного движения вокруг оси.
Момент инерции IxIx относительно оси x оси x для области RR является пределом суммы моментов инерции областей RijRij относительно оси x. оси x. Следовательно,
Ix = limk, l → ∞∑i = 1k∑j = 1l (yij *) 2mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) 2ρ (xij *, yij *) ΔA = ∬Ry2ρ (x, y) dA.Ix = limk, l → ∞∑i = 1k∑j = 1l (yij *) 2mij = limk, l → ∞∑i = 1k∑j = 1l (yij *) 2ρ (xij *, yij *) ΔA = ∬Ry2ρ (x, y) dA.Точно так же момент инерции IyIy относительно оси y для RR является пределом суммы моментов инерции областей RijRij вокруг оси y.оси y. Следовательно,
Iy = limk, l → ∞∑i = 1k∑j = 1l (xij *) 2mij = limk, l → ∞∑i = 1k∑j = 1l (xij *) 2ρ (xij *, yij *) ΔA = ∬Rx2ρ (x, y) dA.Iy = limk, l → ∞∑i = 1k∑j = 1l (xij *) 2mij = limk, l → ∞∑i = 1k∑j = 1l (xij *) 2ρ (xij *, yij *) ΔA = ∬Rx2ρ (x, y) dA.Иногда нам нужно найти момент инерции объекта относительно начала координат, который известен как полярный момент инерции.Обозначим это через I0I0 и получим, сложив моменты инерции IxIx и Iy.Iy. Следовательно,
I0 = Ix + Iy = ∬R (x2 + y2) ρ (x, y) dA.I0 = Ix + Iy = ∬R (x2 + y2) ρ (x, y) dA.Все эти выражения можно записать в полярных координатах, подставив x = rcosθ, x = rcosθ, y = rsinθ, y = rsinθ и dA = rdrdθ.dA = rdrdθ. Например, I0 = ∬Rr2ρ (rcosθ, rsinθ) dA.I0 = ∬Rr2ρ (rcosθ, rsinθ) dA.
Пример 5,60
Нахождение моментов инерции треугольной пластинки
Используйте треугольную область RR с вершинами (0,0), (2,2), (0,0), (2,2) и (2,0) (2,0) и с плотностью ρ (x, y) = xyρ (x, y) = xy, как в предыдущих примерах.Найдите моменты инерции.
Решение
Используя установленные выше выражения для моментов инерции, имеем
Ix = ∬Ry2ρ (x, y) dA = ∫x = 0x = 2∫y = 0y = xxy3dydx = 83, Iy = ∬Rx2ρ (x, y) dA = ∫x = 0x = 2∫y = 0y = xx3ydydx = 163, I0 = ∬R (x2 + y2) ρ (x, y) dA = ∫02∫0x (x2 + y2) xydydx = Ix + Iy = 8. Ix = ∬Ry2ρ (x, y) dA = ∫x = 0x = 2∫y = 0y = xxy3dydx = 83, Iy = ∬Rx2ρ (x, y) dA = ∫x = 0x = 2∫y = 0y = xx3ydydx = 163, I0 = ∬R (x2 + y2) ρ (x , y) dA = ∫02∫0x (x2 + y2) xydydx = Ix + Iy = 8.Контрольно-пропускной пункт 5,38
Снова используйте ту же область RR, что и выше, и функцию плотности ρ (x, y) = xy.р (х, у) = ху. Найдите моменты инерции.
Как упоминалось ранее, момент инерции частицы массой мм вокруг оси равен mr2mr2, где rr - расстояние частицы от оси, также известное как радиус вращения.
Следовательно, радиусы вращения относительно оси x, оси x, оси y, оси y и начала координат равны
. Rx = Ixm, Ry = Iym и R0 = I0m, Rx = Ixm, Ry = Iym и R0 = I0m,соответственно. В каждом случае радиус вращения говорит нам, на каком расстоянии (перпендикулярном расстоянии) от оси вращения может быть сосредоточена вся масса объекта.Моменты объекта полезны для поиска информации о балансе и крутящем моменте объекта вокруг оси, но радиусы вращения используются для описания распределения массы вокруг его центральной оси. Есть много приложений в инженерии и физике. Иногда бывает необходимо найти радиус вращения, как в следующем примере.
Пример 5,61
Определение радиуса вращения треугольной пластинки
Рассмотрим ту же треугольную пластину RR с вершинами (0,0), (2,2), (0,0), (2,2) и (2,0) (2,0) и с плотностью ρ (x , y) = xyρ (x, y) = xy, как в предыдущих примерах.Найдите радиусы вращения относительно оси x, оси x, оси y, оси y и начала координат.
Решение
Если мы вычислим массу этой области, мы обнаружим, что m = 2.m = 2. Мы нашли моменты инерции этой пластинки в Примере 5.58. Исходя из этих данных, радиусы инерции относительно оси x, оси x, оси y, оси y и начала координат соответственно равны
. Rx = Ixm = 8/32 = 86 = 233, Ry = Iym = 16/32 = 83 = 263, R0 = I0m = 82 = 4 = 2, Rx = Ixm = 8/32 = 86 = 233, Ry = Iym = 16/32 = 83 = 263, R0 = I0m = 82 = 4 = 2.Контрольно-пропускной пункт 5,39
Используйте ту же область RR из примера 5.61 и функцию плотности ρ (x, y) = xy.ρ (x, y) = xy. Найдите радиусы вращения относительно оси x, оси x, оси y, оси y и начала координат.
Центр масс и моменты инерции в трех измерениях
Все выражения двойных интегралов, обсуждавшиеся до сих пор, можно изменить, чтобы они стали тройными интегралами.
Определение
Если у нас есть твердый объект QQ с функцией плотности ρ (x, y, z) ρ (x, y, z) в любой точке (x, y, z) (x, y, z) в пространстве, то его масса
m = ∭Qρ (x, y, z) dV.m = ∭Qρ (x, y, z) dV.Его моменты относительно плоскости xy, плоскости xy, плоскости xz, плоскости xz и плоскости yz равны
Mxy = ∭Qzρ (x, y, z) dV, Mxz = ∭Qyρ (x, y, z) dV, Myz = ∭Qxρ (x, y, z) dV.Mxy = ∭Qzρ (x, y, z) dV, Mxz = ∭Qyρ (x, y, z) dV, Myz = ∭Qxρ (x, y, z) dV.Если центром масс объекта является точка (x−, y−, z -), (x−, y−, z−), то
x− = Myzm, y− = Mxzm, z− = Mxym. x− = Myzm, y− = Mxzm, z− = Mxym.Также, если твердый объект однороден (с постоянной плотностью), тогда центр масс становится центроидом твердого тела.Наконец, моменты инерции относительно плоскости yz, плоскости yz, плоскости xz, плоскости xz и плоскости xy равны
. Ix = ∭Q (y2 + z2) ρ (x, y, z) dV, Iy = ∭Q (x2 + z2) ρ (x, y, z) dV, Iz = ∭Q (x2 + y2) ρ (x , y, z) dV. Ix = ∭Q (y2 + z2) ρ (x, y, z) dV, Iy = ∭Q (x2 + z2) ρ (x, y, z) dV, Iz = ∭Q ( x2 + y2) ρ (x, y, z) dV.Пример 5,62
Определение массы твердого тела
Предположим, что QQ - сплошная область, ограниченная x + 2y + 3z = 6x + 2y + 3z = 6 и координатными плоскостями, и имеет плотность ρ (x, y, z) = x2yz.ρ (x, y, z) = x2yz. Найдите общую массу.
Решение
Область QQ представляет собой тетраэдр (рисунок 5.70), пересекающий оси в точках (6,0,0), (0,3,0), (6,0,0), (0,3,0) и (0,0,2). (0,0,2). Чтобы найти пределы интегрирования, пусть z = 0z = 0 в наклонной плоскости z = 13 (6 − x − 2y) .z = 13 (6 − x − 2y). Затем для xx и yy найдите проекцию QQ на плоскость xy, плоскость xy, которая ограничена осями и прямой x + 2y = 6.x + 2y = 6. Отсюда масса
m = ∭Qρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x − 2y) x2yzdzdydx = 10835 ≈3.086.m = ∭Qρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x − 2y) x2yzdzdydx = 10835≈3,086. Фигура 5,70 Определение массы трехмерного твердого тела Q.Q.Контрольно-пропускной пункт 5,40
Рассмотрим ту же область QQ (рис. 5.70) и используем функцию плотности ρ (x, y, z) = xy2z.ρ (x, y, z) = xy2z. Найдите массу.
Пример 5,63
Нахождение центра масс твердого тела
Предположим, что QQ - сплошная область, ограниченная плоскостью x + 2y + 3z = 6x + 2y + 3z = 6 и координатными плоскостями с плотностью ρ (x, y, z) = x2yzρ (x, y, z) = x2yz ( см. рисунок 5.70). Найдите центр масс с помощью десятичного приближения. Используйте массу, найденную в Примере 5.62
.Решение
Мы уже использовали этот тетраэдр и знаем пределы интегрирования, поэтому можем сразу приступить к вычислениям. Во-первых, нам нужно найти моменты относительно плоскости xy, плоскости xy, плоскости xz, плоскости xz и плоскости yz: yz-plane:
Mxy = ∭Qzρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x − 2y) x2yz2dzdydx = 5435 ≈1.543, Mxz = ∭Qyρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x − 2y) x2y2zdzdydx = 8135≈2.314, Myz = ∭Qxρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x − 2y) x3yzdzdydx = 24335≈6,943. Mxy = ∭Qzρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 − x− 2y) x2yz2dzdydx = 5435≈1,543, Mxz = ∭Qyρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1/3 (6 −x − 2y) x2y2zdzdydx = 8135≈2,314, Myz = ∭Qxρ (x, y, z) dV = ∫x = 0x = 6∫y = 0y = 1/2 (6 − x) ∫z = 0z = 1 / 3 (6 − x − 2y) x3yzdzdydx = 24335≈6,943.Следовательно, центр масс
x− = Myzm, y− = Mxzm, z− = Mxym, x− = Myzm = 243/35108/35 = 243 · 108 = 2,25, y− = Mxzm = 81/35108/35 = 81108 = 0,75, z− = Mxym = 54/35108/35 = 54108 = 0,5. X− = Myzm, y− = Mxzm, z− = Mxym, x− = Myzm = 243/35108/35 = 243108 = 2.25, y− = Mxzm = 81/35 · 108/35 = 81 · 108 = 0,75, z− = Mxym = 54/35 · 108/35 = 54 · 108 = 0,5.Центром масс тетраэдра QQ является точка (2,25,0,75,0,5). (2,25,0,75,0,5).
Контрольно-пропускной пункт 5,41
Рассмотрим ту же область QQ (рис. 5.70) и используем функцию плотности ρ (x, y, z) = xy2z.ρ (x, y, z) = xy2z. Найдите центр масс.
Мы завершаем этот раздел примером нахождения моментов инерции Ix, Iy, Ix, Iy и Iz.Iz.
Пример 5,64
Нахождение моментов инерции твердого тела
Предположим, что QQ - сплошная область и ограничена x + 2y + 3z = 6x + 2y + 3z = 6 и координатными плоскостями с плотностью ρ (x, y, z) = x2yzρ (x, y, z) = x2yz (см. рисунок 5.70). Найдите моменты инерции тетраэдра QQ относительно плоскости yz, плоскости yz, плоскости xz, плоскости xz и плоскости xy. Xy.
Решение
И снова мы можем почти сразу написать пределы интегрирования и, следовательно, мы можем быстро перейти к оценке моментов инерции. Используя формулу, изложенную ранее, моменты инерции тетраэдра QQ относительно плоскости xy, плоскости xy, плоскости xz, плоскости xz и плоскости yz-planeyz равны
. Ix = ∭Q (y2 + z2) ρ (x, y, z) dV, Iy = ∭Q (x2 + z2) ρ (x, y, z) dV, Ix = ∭Q (y2 + z2) ρ (x , y, z) dV, Iy = ∭Q (x2 + z2) ρ (x, y, z) dV,и
Iz = ∭Q (x2 + y2) ρ (x, y, z) dV, где ρ (x, y, z) = x2yz.Iz = ∭Q (x2 + y2) ρ (x, y, z) dV, где ρ (x, y, z) = x2yz.Продолжая вычисления, имеем
Ix = ∭Q (y2 + z2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) (y2 + z2) x2yzdzdydx = 11735≈ 3.343, Iy = ∭Q (x2 + z2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) (x2 + z2) x2yzdzdydx = 68435≈19,543, Iz = ∭Q (x2 + y2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) (x2 + y2) x2yzdzdydx = 72935≈20,829. Ix = ∭Q (y2 + z2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) (y2 + z2) x2yzdzdydx = 11735≈3,343, Iy = ∭Q (x2 + z2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) ( x2 + z2) x2yzdzdydx = 68435≈19.543, Iz = ∭Q (x2 + y2) x2yzdV = ∫x = 0x = 6∫y = 0y = 12 (6 − x) ∫z = 0z = 13 (6 − x − 2y) (x2 + y2) x2yzdzdydx = 72935≈20,829.Таким образом, моменты инерции тетраэдра QQ относительно плоскости yz, плоскости yz, плоскости xz, плоскости xz и плоскости xy равны 117 / 35,684 / 35 и 729 / 35,117 / 35,684 / 35 и 729/35 соответственно.
Контрольно-пропускной пункт 5,42
Рассмотрим ту же область QQ (рис. 5.70) и используем функцию плотности ρ (x, y, z) = xy2z.ρ (x, y, z) = xy2z. Найдите моменты инерции относительно трех координатных плоскостей.
Раздел 5.6 Упражнения
В следующих упражнениях область RR, занятая пластиной, показана на графике. Найдите массу RR с функцией плотности ρ.ρ.
297 .RR - треугольная область с вершинами (0,0), (0,3), (0,0), (0,3) и (6,0); ρ (x, y) = xy. (6 , 0); ρ (x, y) = xy.
298 .RR - треугольная область с вершинами (0,0), (1,1), (0,0), (1,1), (0,5); ρ (x, y) = x + y. ( 0,5); ρ (x, y) = x + y.
299 .RR - прямоугольная область с вершинами (0,0), (0,3), (6,3), (0,0), (0,3), (6,3) и (6,0) ; (6,0); р (х, у) = ху.р (х, у) = ху.
300 .RR - прямоугольная область с вершинами (0,1), (0,3), (3,3), (0,1), (0,3), (3,3) и (3,1) ; (3,1); ρ (x, y) = x2y. ρ (x, y) = x2y.
301 .RR - область трапеции, определяемая линиями y = −14x + 52, y = 0, y = 2, y = −14x + 52, y = 0, y = 2 и x = 0; x = 0; ρ (x, y) = 3xy.ρ (x, y) = 3xy.
302 .RR - область трапеции, определяемая линиями y = 0, y = 1, y = x, y = 0, y = 1, y = x и y = −x + 3; ρ (x, y) = 2x + yy = −x + 3; ρ (x, y) = 2x + y.
303 .RR - диск радиуса 22 с центром в точках (1,2); (1,2); ρ (х, у) = х2 + y2−2x − 4y + 5.ρ (х, у) = х2 + y2−2x − 4y + 5.
304 .RR - дисковый агрегат; ρ (x, y) = 3x4 + 6x2y2 + 3y4.ρ (x, y) = 3x4 + 6x2y2 + 3y4.
305 .RR - область, ограниченная эллипсом x2 + 4y2 = 1; ρ (x, y) = 1.x2 + 4y2 = 1; ρ (x, y) = 1.
306 .R = {(x, y) | 9x2 + y2≤1, x≥0, y≥0}; R = {(x, y) | 9x2 + y2≤1, x≥0, y≥0}; ρ (x, y) = 9x2 + y2. ρ (x, y) = 9x2 + y2.
307 .RR - это область, ограниченная y = x, y = −x, y = x + 2, y = −x + 2; y = x, y = −x, y = x + 2, y = −x + 2 ; ρ (x, y) = 1. ρ (x, y) = 1.
308 .RR - это область, ограниченная y = 1x, y = 2x, y = 1, y = 1x, y = 2x, y = 1 и y = 2; ρ (x, y) = 4 (x + y).у = 2; р (х, у) = 4 (х + у).
В следующих упражнениях рассмотрим пластину, занимающую область RR и имеющую функцию плотности ρρ, указанную в предыдущей группе упражнений. Используйте систему компьютерной алгебры (CAS), чтобы ответить на следующие вопросы.
- Найдите моменты MxMx и MyMy относительно оси x, оси x и оси y, оси y, соответственно.
- Вычислить и построить центр масс пластинки.
- [T] Используйте CAS, чтобы найти центр масс на графике R.Р.
[T] RR - треугольная область с вершинами (0,0), (0,3), (0,0), (0,3) и (6,0); ρ (x, y) = xy. (6,0); ρ (x, y) = xy.
310 .[T] RR - треугольная область с вершинами (0,0), (1,1) и (0,5); ρ (x, y) = x + y. (0,0), ( 1,1) и (0,5); ρ (x, y) = x + y.
311 .[T] RR - прямоугольная область с вершинами (0,0), (0,3), (6,3) и (6,0); (0,0), (0,3), (6,3) и (6,0); р (х, у) = ху. р (х, у) = ху.
312 .[T] RR - прямоугольная область с вершинами (0,1), (0,3), (3,3) и (3,1); (0,1), (0,3), (3,3) и (3,1); р (х, у) = х2у.р (х, у) = х2у.
313 .[T] RR - трапециевидная область, определяемая линиями y = −14x + 52, y = 0, y = −14x + 52, y = 0, y = 2 и x = 0; y = 2 и x = 0; ρ (x, y) = 3xy.ρ (x, y) = 3xy.
314 .[T] RR - область трапеции, определяемая линиями y = 0, y = 1, y = x, y = 0, y = 1, y = x и y = −x + 3; ρ (x , y) = 2x + yy = −x + 3; ρ (x, y) = 2x + y.
315 .[T] RR - диск радиуса 22 с центром в точках (1,2); (1,2); ρ (x, y) = x2 + y2−2x − 4y + 5. ρ (x, y) = x2 + y2−2x − 4y + 5.
316 .[T] RR - дисковый агрегат; ρ (x, y) = 3x4 + 6x2y2 + 3y4.ρ (x, y) = 3x4 + 6x2y2 + 3y4.
317 .[T] RR - это область, ограниченная эллипсом x2 + 4y2 = 1; ρ (x, y) = 1.x2 + 4y2 = 1; ρ (x, y) = 1.
318 .[T] R = {(x, y) | 9x2 + y2≤1, x≥0, y≥0}; R = {(x, y) | 9x2 + y2≤1, x≥0, y ≥0}; ρ (x, y) = 9x2 + y2. ρ (x, y) = 9x2 + y2.
319 .[T] RR - это область, ограниченная y = x, y = −x, y = x + 2, y = x, y = −x, y = x + 2 и y = −x + 2; у = −x + 2; ρ (x, y) = 1. ρ (x, y) = 1.
320 .[T] RR - это область, ограниченная y = 1x, y = 1x, y = 2x, y = 1 и y = 2; y = 2x, y = 1 и y = 2; р (х, у) = 4 (х + у).р (х, у) = 4 (х + у).
В следующих упражнениях рассмотрим пластину, занимающую область RR и имеющую функцию плотности ρρ, заданную в первых двух группах упражнений.
- Найдите моменты инерции Ix, Iy, Ix, Iy и I0I0 относительно оси x, оси x, оси y, оси y и начала координат соответственно.
- Найдите радиусы вращения относительно оси x, оси x, оси y, оси y и начала координат соответственно.
RR - треугольная область с вершинами (0,0), (0,3), (0,0), (0,3) и (6,0); ρ (x, y) = xy.(6,0); ρ (x, y) = xy.
322 .RR - треугольная область с вершинами (0,0), (1,1), (0,0), (1,1) и (0,5); ρ (x, y) = x + y. (0,5); ρ (x, y) = x + y.
323 .RR - прямоугольная область с вершинами (0,0), (0,3), (6,3), (0,0), (0,3), (6,3) и (6,0) ; ρ (x, y) = xy. (6,0); ρ (x, y) = xy.
324 .RR - прямоугольная область с вершинами (0,1), (0,3), (3,3), (0,1), (0,3), (3,3) и (3,1) ; ρ (x, y) = x2y. (3,1); ρ (x, y) = x2y.
325 .RR - область трапеции, определяемая линиями y = −14x + 52, y = 0, y = 2, y = −14x + 52, y = 0, y = 2 и x = 0; ρ (x, y ) = 3xy.х = 0; р (х, у) = 3xy.
326 .RR - область трапеции, определяемая линиями y = 0, y = 1, y = x, y = 0, y = 1, y = x и y = −x + 3; ρ (x, y) = 2x + yy = −x + 3; ρ (x, y) = 2x + y.
327 .RR - диск радиуса 22 с центром в точках (1,2); (1,2); ρ (x, y) = x2 + y2−2x − 4y + 5. ρ (x, y) = x2 + y2−2x − 4y + 5.
328 .RR - дисковый агрегат; ρ (x, y) = 3x4 + 6x2y2 + 3y4.ρ (x, y) = 3x4 + 6x2y2 + 3y4.
329 .RR - область, ограниченная эллипсом x2 + 4y2 = 1; ρ (x, y) = 1.x2 + 4y2 = 1; ρ (x, y) = 1.
330 .R = {(x, y) | 9x2 + y2≤1, x≥0, y≥0}; ρ (x, y) = 9x2 + y2.R = {(x, y) | 9x2 + y2≤1, x≥0, y≥0}; ρ (x, y) = 9x2 + y2.
331 .RR - это область, ограниченная значениями y = x, y = −x, y = x + 2, y = −x + 2; y = x, y = −x, y = x + 2 и y = −x + 2. ; ρ (x, y) = 1. ρ (x, y) = 1.
332 .RR - это область, ограниченная значениями y = 1x, y = 2x, y = 1 и y = 2; ρ (x, y) = 4 (x + y). Y = 1x, y = 2x, y = 1, andy = 2; ρ (x, y) = 4 (x + y).
333 .Пусть QQ будет твердым единичным кубом. Найдите массу твердого тела, если его плотность ρρ равна квадрату расстояния от произвольной точки QQ до плоскости xy. Xy.
334 .Пусть QQ будет твердой единичной полусферой. Найдите массу твердого тела, если его плотность ρρ пропорциональна расстоянию от произвольной точки QQ до начала координат.
335 .Твердое тело QQ постоянной плотности 11 расположено внутри сферы x2 + y2 + z2 = 16x2 + y2 + z2 = 16 и вне сферы x2 + y2 + z2 = 1.x2 + y2 + z2 = 1. Покажите, что центр масс твердого тела не находится внутри твердого тела.
336 .Найдите массу твердого тела Q = {(x, y, z) | 1≤x2 + z2≤25, y≤1 − x2 − z2} Q = {(x, y, z) | 1≤x2 + z2 ≤25, y≤1 − x2 − z2}, плотность которого равна ρ (x, y, z) = k, ρ (x, y, z) = k, где k> 0.к> 0.
337 .[T] Тело Q = {(x, y, z) | x2 + y2≤9,0≤z≤1, x≥0, y≥0} Q = {(x, y, z) | x2 + y2≤9,0≤z≤1, x≥0, y≥0} имеет плотность, равную расстоянию до xy-plane.xy-plane. Используйте CAS, чтобы ответить на следующие вопросы.
- Найдите массу Q.Q.
- Найдите моменты Mxy, Mxz и MyzMxy, Mxz и Myz относительно плоскости xy, плоскости xy, плоскости xz, плоскости xz и плоскости yz, плоскости yz соответственно.
- Найдите центр масс Q.Q.
- Изобразите график QQ и найдите его центр масс.
Рассмотрим твердое тело Q = {(x, y, z) | 0≤x≤1,0≤y≤2,0≤z≤3} Q = {(x, y, z) | 0≤x≤1, 0≤y≤2,0≤z≤3} с функцией плотности ρ (x, y, z) = x + y + 1. ρ (x, y, z) = x + y + 1.
- Найдите массу Q.Q.
- Найдите моменты Mxy, Mxz и MyzMxy, Mxz и Myz относительно плоскости xy, плоскости xy, плоскости xz, плоскости xz и плоскости yz, плоскости yz соответственно.
- Найдите центр масс Q.Q.
[T] Твердое тело QQ имеет массу, определяемую тройным интегралом ∫ − 11∫0π4∫01r2drdθdz.∫ − 11∫0π4∫01r2drdθdz. Используйте CAS, чтобы ответить на следующие вопросы.
- Покажите, что центр масс QQ расположен в плоскости xy. Xy.
- Изобразите график QQ и найдите его центр масс.
Тело QQ ограничено плоскостями x + 4y + z = 8, x = 0, y = 0 и z = 0. x + 4y + z = 8, x = 0, y = 0 и z = 0. Его плотность в любой точке равна расстоянию до плоскости xz.xz плоскости. Найдите моменты инерции IyIy твердого тела относительно плоскости xz.xz плоскости.
341 .Тело QQ ограничено плоскостями x + y + z = 3, x + y + z = 3, x = 0, y = 0, x = 0, y = 0 и z = 0.г = 0. Его плотность равна ρ (x, y, z) = x + ay, ρ (x, y, z) = x + ay, где a> 0.a> 0. Покажите, что центр масс твердого тела расположен в плоскости z = 35z = 35 для любого значения a.a.
342 .Пусть QQ - твердое тело, расположенное вне сферы x2 + y2 + z2 = zx2 + y2 + z2 = z и внутри верхней полусферы x2 + y2 + z2 = R2, x2 + y2 + z2 = R2, где R> 1.R > 1. Если плотность твердого тела равна ρ (x, y, z) = 1x2 + y2 + z2, ρ (x, y, z) = 1x2 + y2 + z2, найти RR такое, что масса твердого тела равна 7π2,7π2 .
343 .Масса твердого тела QQ определяется выражением ∫02∫04 − x2∫x2 + y216 − x2 − y2 (x2 + y2 + z2) ndzdydx, ∫02∫04 − x2∫x2 + y216 − x2 − y2 (x2 + y2 + z2) ndzdydx, где nn - целое число.Определите nn так, чтобы масса твердого тела была (2−2) π. (2−2) π.
344 .Пусть QQ - твердое тело, ограниченное над конусом x2 + y2 = z2x2 + y2 = z2 и под сферой x2 + y2 + z2−4z = 0.x2 + y2 + z2−4z = 0. Его плотность - постоянная величина k> 0. k> 0. Найдите такое kk, чтобы центр масс твердого тела находился на 77 единицах от начала координат.
345 .Тело Q = {(x, y, z) | 0≤x2 + y2≤16, x≥0, y≥0,0≤z≤x} Q = {(x, y, z) | 0≤x2 + y2≤16, x≥0, y≥0,0≤z≤x} имеет плотность ρ (x, y, z) = k.ρ (x, y, z) = k. Покажите, что момент MxyMxy относительно плоскости xy составляет половину момента MyzMyz относительно плоскости yz.yz-самолет.
346 .Тело QQ ограничено цилиндром x2 + y2 = a2, x2 + y2 = a2, параболоидом b2 − z = x2 + y2, b2 − z = x2 + y2 и плоскостью xy, плоскостью xy, где 0 <а <б. 0 <а <б. Найдите массу твердого тела, если его плотность равна ρ (x, y, z) = x2 + y2. Ρ (x, y, z) = x2 + y2.
347 .Пусть QQ - твердое тело постоянной плотности k, k, где k> 0, k> 0, расположенное в первом октанте, внутри кругового конуса x2 + y2 = 9 (z − 1) 2, x2 + y2 = 9 (z − 1) 2, а над плоскостью z = 0. z = 0. Покажите, что момент MxyMxy относительно плоскости xy - это то же самое, что момент MyzMyz относительно плоскости xz.xz-плоскость.
348 .Твердое тело QQ имеет массу, определяемую тройным интегралом ∫01∫0π / 2∫0r2 (r4 + r) dzdθdr.∫01∫0π / 2∫0r2 (r4 + r) dzdθdr.
- Найдите плотность твердого тела в прямоугольных координатах.
- Найдите момент MxyMxy относительно плоскости xy. Xy.
Твердое тело QQ имеет момент инерции IxIx относительно плоскости yz-planeyz, задаваемый тройным интегралом ∫02∫ − 4 − y24 − y2∫12 (x2 + y2) x2 + y2 (y2 + z2) (x2 + y2) ) dzdxdy.∫02∫ − 4 − y24 − y2∫12 (x2 + y2) x2 + y2 (y2 + z2) (x2 + y2) dzdxdy.
- Найдите плотность Q.Q.
- Найдите момент инерции IzIz относительно плоскости xy. Xy.
Твердое тело QQ имеет массу, определяемую тройным интегралом ∫0π / 4∫02secθ∫01 (r3cosθsinθ + 2r) dzdrdθ.∫0π / 4∫02secθ∫01 (r3cosθsinθ + 2r) dzdrdθ.
- Найдите плотность твердого тела в прямоугольных координатах.
- Найдите момент MxzMxz относительно плоскости xz.xz-плоскости.
Пусть QQ - твердое тело, ограниченное плоскостью xy, плоскостью xy, цилиндром x2 + y2 = a2, x2 + y2 = a2 и плоскостью z = 1, z = 1, где a> 1a> 1 - настоящий номер.Найти момент MxyMxy твердого тела относительно плоскости xy-planexy, если его плотность, заданная в цилиндрических координатах, равна ρ (r, θ, z) = d2fdr2 (r), ρ (r, θ, z) = d2fdr2 (r), где ff - дифференцируемая функция с непрерывной и дифференцируемой первой и второй производными на (0, a). (0, a).
352 .Твердое тело QQ имеет объем, определяемый как ∬D∫abdAdz, ∬D∫abdAdz, где DD - проекция твердого тела на плоскость xy, xy, a
353 . Рассмотрим твердое тело, окруженное цилиндром x2 + z2 = a2x2 + z2 = a2 и плоскостями y = by = b и y = c, y = c, где a> 0a> 0 и b
354 . [T] Средняя плотность твердого QQ определяется как ρave = 1V (Q) ∭Qρ (x, y, z) dV = mV (Q), ρave = 1V (Q) ∭Qρ (x, y , z) dV = mV (Q), где V (Q) V (Q) и mm - объем и масса Q, Q соответственно. Если плотность единичного шара с центром в начале координат равна ρ (x, y, z) = e − x2 − y2 − z2, ρ (x, y, z) = e − x2 − y2 − z2, используйте CAS для найти его среднюю плотность. Округлите ответ до трех десятичных знаков.
355 .Покажите, что моменты инерции Ix, Iy, и IsIx, Iy и Iz относительно плоскости yz, плоскости yz, плоскости xz, плоскости xz и плоскости xy, плоскости xy, соответственно, единичного шара с центром в начале координат, плотность которого равна ρ (x, y, z) = e − x2 − y2 − z2ρ (x, y, z) = e − x2 − y2 − z2, одинаковы.Округлите ответ до двух десятичных знаков.
канал 7, вращательное движение
канал 7, вращательное движениеCh 7: вращательное движение; Пр. 2, 6, 11, 18, 20, 23, 28, 37; Пб 1
| Вернуться на домашнюю страницу 3050-х | Назад к календарю | ToC, Ch 7 | Ch 8, Gravity |
Упражнения (Обсуждение Вопросы)Пр. 7.Xtra Который быстрее скатится с холма - твердый цилиндр или твердая сфера?
Из рисунка 7.3, на странице 117, мы знаем, что «вращательный масса "или" момент инерции "для твердого цилиндра I = ( 1 / 2 ) m r 2 и для твердой сферы быть I = ( 2 / 5 ) m r 2 . С этими меньше "вращательная масса", твердая сфера легче вращать, поэтому сплошная сфера будет катиться с холма Быстрее.
Который быстрее скатится с холма - цельный шар или полый мяч?
Из рисунка 7.3, на странице 117, мы знаем, что «вращательный масса "или" момент инерции "для полого цилиндра, кольца или обруча составляет I = m r 2 , а для сплошного цилиндра или диска I = ( 1 / 2 ) m r 2 . Полый цилиндр или кольцо или обруч имеют всю свою массу на расстоянии r от его ось вращения. Однако твердый цилиндр имеет массу распределены повсюду.Некоторая его масса составляет даже на . ось вращения. Это означает "вращательную массу" твердого тела. цилиндр меньше .
Рис. 7.3. , а не , дает нам "вращательную массу" полая сфера или полый шар. Однако мы все еще можем знать, что «вращательная масса» твердой сферы будет на меньше чем «вращательная масса» полой сферы. Это потому что твердая сфера будет иметь большую массу на меньшем расстоянии от оси вращения.
С его меньшей "вращательной массой", solid сферу легче вращать, поэтому сплошная сфера будет скатывайтесь с холма быстрее.
Пр. 7.2 Баскетболист хочет уравновесить мяч на своем кончик пальца. Будет ли он более успешным с вращающимся мячом или неподвижный шар? Какой физический принцип поддерживает ваше отвечать?
А вращающийся баскетбольный мяч уже имеет некоторый угловой момент вокруг своей оси вращения.
Стационарный баскетбольный мяч с нулевым угловым моментом так что он может легко повернуться и упасть.
Однако, если он на вращается на , он имеет угловой момент, который мы могли бы представить как вектор.
Теперь, если вращающийся баскетбольный мяч упадет, весь его угловой момент изменения. Это изменение углового момента будет большим; . Такое большое изменение углового момента требует большого крутящего момента (или вращательная сила).Это означает, что балансировать спиннинг намного проще. баскетбол, чем балансировать на стационарном.
Ex 7.6 Почему при ускорении автомобиля передняя часть повышаться? Почему его передок проседает при торможении?
Автомобиль ускоряется - вперед, когда движется быстрее и быстрее или назад при торможении - из-за прилагаемых сил на колеса на шоссе. Посмотрите на вращательный эффект этих сил (то есть посмотрите на крутящие моменты, вызванные этими силами).Возьмите эти моменты о центр массы.
Когда автомобиль ускоряется вперед, шоссе проявляет силу вперед по колесам. Эта прямая сила вызывает против часовой стрелки крутящий момент. То есть помимо причинения ускорение вперед, этот крутящий момент - этот вращательный эффект сила - заставит машину вращаться против часовой стрелки. А вращение против часовой стрелки означает, что нос поднимется.
Конечно, нос может подниматься настолько, что теряет контакт с дорога; это называется "вилли".Вы можете это увидеть сделано и с велосипедами.
Когда автомобиль ускоряется назад - как при торможении - шоссе оказывает давление на колеса. Эта передовая сила вызывает вращающий момент по часовой стрелке. То есть помимо причинения обратное ускорение, этот крутящий момент - этот вращательный эффект силы - заставит машину вращаться по часовой стрелке. А вращение по часовой стрелке означает, что нос будет опущен.
«По часовой стрелке» и «против часовой стрелки» зависят от того, "вправо" и "назад" означает "влево", как показано на эти диаграммы.
Ex 7.Xtra Который легче открыть застрявшую крышку из банка с краской - отвертка с толстой ручкой или с длинной ручка? Что проще отвернуть упорные винты? Почему?
Чтобы открыть крышку баллончика с краской, понадобится отвертка. с длинной ручкой . Край банки с краской обеспечивает точка опоры или шарнир или ось вращения. Длинная ручка обеспечивает большое плечо рычага , когда вы прикладываете силу на конце ручки отвертки.Это означает, что большая сила передается на конец отвертки, имеющий очень маленький плечо рычага . Это означает, что к крышке прилагается большое усилие. краски можно.
«Упрямый винт», «ржавый винт» или «застрявший винт» требует большая «вращательная сила» вокруг своей оси вращения. у меня есть указал, что на этом чертеже силы на краях винты. Длина ручки отвертки не влияет на эти силы или "вращательная сила", которую они обеспечивают.Но толщина ручки - диаметр ручки - из отвертка делает . Вы можете приложить столько силы прежде чем ваша рука начнет соскальзывать. Но если эта сила будет применена к ручка большего диаметра, с большим плечом рычага, "поворотный сила "при условии будет больше и тем больше" вращательное сила »будет приложена к упорному винту.
Пример 7.11 Изменяется ли чистый крутящий момент, когда партнер на качелях или teter-totter стоит или висит на конце вместо того, чтобы сидеть? (Делает вес или плечо рычага меняются?
В любом случае вес по прямой .В Моментный рычаг (или плечо рычага) - это перпендикуляр . расстояние от оси до груза. Это означает вращательное действие силы против часовой стрелки (то есть крутящий момент ) то же сидит ли партнер, стоит или висит на качелях, или качаться.
Ex 7.Xtra Почему колебательное движение одиночной звезды указание на то, что у звезды есть планета или система планет?
Центр масс не качается.Итак, если мы увидим сингл звезда, которая колышется, означает, что что-то еще - что мы можем не вижу - тоже качается, чтобы центр масс оставался неподвижным. «Что-то еще» может быть планетой, системой планет или еще одна звезда, которую мы не видим.
Пример 7.18 Почему вы должны наклоняться вперед при переноске тяжелого груза на ваша спина?
Вы должны держать центр масс над ногами - ваша область поддержки.
Пр. 7.20 Обязательно ли размещать гири посередине весы с равными ручками для точных измерений? Почему или Почему нет?
Нет. Сковороды поддерживаются или подвешиваются таким образом. что плечо рычага (или плечо момента) будет одинаковым, независимо от того, веса находятся посередине или нет. Если плечо рычага остается в то же самое, то вращательный эффект груза (то есть крутящий момент, который он производит) будет таким же.
Пр. 7.23 Иногда по воздуху пролетает мяч, в который попал мяч. без вращения, а в других случаях он кувыркается с ног на голову, так как странствия.Что касается центра масс мяча, как это пнули в обоих случаях?
В случае кувырка мяч ударяется крутящий момент относительно его центра масс. Его пинают, поэтому сила имеет значительный вращательный эффект.
В случае невращающегося корпуса мяч ударяется ногой, поэтому сила направлен в центр масс. Этот удар дает нет вращательный эффект.
Пр. 7.25 Как можно сложить три кирпича, показанные ниже, так, чтобы верхний кирпич имеет максимальное смещение по горизонтали снизу кирпич? Например, сложив их, как показано пунктирными линиями, быть нестабильным, и кирпичи рухнут. ( Подсказка: Начните с верхний кирпич и работать вниз. На каждом интерфейсе центр тяжести кирпичи выше не должны выходить за край опоры кирпич.)
Используя подсказку, давайте начнем с двух верхних кубиков.В самый верхний кирпич можно расположить так, чтобы его центр масс находился только на край второго кирпича.
Где находится центр масс этой системы из двух кирпичей? Центр масс - это «среднее положение» масс, поэтому он должен находиться посередине между центрами масс двух кирпичей,
Центр масс этой двухкирпичной системы расположен в расстояние 3 / 4 длины кирпича от левого конца нижнего кирпича, как показано выше.Теперь мы можем поместите это поверх нижнего кирпича так, чтобы это центр масса чуть выше края нижнего кирпича,
При таком расположении самый верхний кирпич может быть расширен. 3 / 4 длины кирпича за пределами нижний кирпич.
Пример 7.28 Почему опасно открывать верхние ящики полностью загруженный картотечный шкаф, не прикрепленный к полу.
Помните, что для устойчивости центр масс должен быть выше область поддержки. Открывая полностью загруженные ящики картотечный шкаф может перемещать центр масс за пределы основания картотечный шкаф. Это приведет к его опрокидыванию.
Пр. 7.29 Опишите сравнительную стабильность трех объекты, показанные на рис. 7.21, на стр. 123, с точки зрения работы и потенциальная энергия.
При опрокидывании каждого из них поднимается центр масс.Этот означает, что каждый из них сейчас находится в стабильном равновесии . Собираюсь слева направо, когда каждый наклонен, его центр масс или центр тяжести приподнят на больше, чем на слева от него. Это означает, что проделано на больше работы, чем на , чтобы дать чаевые каждому последующему. Это означает, что каждый из них на стабильнее, чем на . левый.
Ex 7.32 Длинная гусеница, сбалансированная, как качели, поддерживает гольф шар и более массивный бильярдный шар со сжатой пружиной между двумя.Когда пружина отпускается, шарики отходят друг от друга. Кончик гусеницы по часовой стрелке, кончик против часовой стрелки, или оставаться в равновесии, когда шары катятся наружу? Какие принципы делают вы используете для своего объяснения?
Центр масс изначально расположен непосредственно над вращаться. Когда два шара отрываются друг от друга, они делают это. таким образом, что покидает центр масс , где он было . То есть, после того, как они разойдутся, центр масс остается прямо над точкой поворота .Следовательно, след остается сбалансированный!
Пример 7.37 Когда парящий орел поворачивается в своем полете, что источник действующей на него центростремительной силы?
По прямой горизонтальный полет орел вниз вес просто уравновешивается восходящим «подъемом» крыльев орла. По мере того, как орел кружит, его крылья меняются так, что "подъемная сила" компонент силы, направленный к центру круг; это центростремительная сила .
Пример 7.38 Ваш друг говорит, что спутник на круговой орбите не ускоряется, о чем свидетельствует его постоянная скорость. Ваш другой друг говорит, что он ускоряется, о чем свидетельствует центростремительная сила снабжается силой тяжести? Что вы говорите ?
Ускорение - это скорость изменения скорость и скорость - это вектор , что означает это включает направление . Итак, изменение направления скорости предполагает ускорение.Второй закон движения Ньютона, F = m a , говорит нам о тесной связи между силой и ускорение. Ваш второй друг, который понимает, что сила тяжести сила, действующая на спутник, правильно, если говорить, что сила обеспечивает масса спутника с ускорением.
Пример 7,49 Почему типичный небольшой вертолет с одним главным у ротора есть второй маленький ротор на хвосте? Опишите последствия если малый ротор выйдет из строя?
Малый ротор оказывает усилие на конце длинного рычага. рука.Это обеспечивает "вращающую силу" на вертолете, чтобы противодействовать или противодействовать «силе вращения», создаваемой основным ротор. Рассмотрим сначала неподвижный вертолет. В качестве основного ротора запускается и набирает угловой момент, тело должно иметь "сила вращения" на нем, иначе он начнет вращаться в обратном направлении направление, чтобы он имел угловой момент в другом направлении. Маленький хвостовой винт создает «вращающую силу», поэтому корпус не вращается.
Вертолеты России обычно имеют противовращающихся основных роторы сверху, так что угловой момент двух основных роторов равно нулю.
Pb 7.1 На одном конце палки экспонометра свисает груз весом 1 кг. а с другого конца висит гиря весом 3 кг. Где центр массы этой системы (точки равновесия)? Как твой ответ относятся к крутящему моменту?Сказать «палочка для экспонометра» означает просто игнорировать массу. самой метки, потому что она намного меньше, чем даже Подвешиваемая масса 1 кг.
Где-то там есть центр масс (ЦМ), отметьте его на схеме.Мы будем измерять расстояния от ЦОМ.
Отмерим расстояния в сантиметрах (100 см = 1 м). Масса 3 кг имеет вес 30 Н (помните, что w = мг) и расположен на расстоянии x от CoM. Масса в 1 кг имеет массой 10 Н и находится на расстоянии ( 100 - х ) от CoM (помните, что это метровая рукоять , поэтому расстояние между двумя подвесными грузами должно быть 100 см).
крутящий момент = (плечо рычага) (сила)Каждый из этих грузов вызывает крутящий момент.Вес в 1 кг вызывает против часовой стрелки крутящий момент около ЦОМ
крутящий момент (против часовой стрелки) = (100 - x) (10 Н)Груз массой 3 кг вызывает вращающий момент по часовой стрелке вокруг ЦОМ. из
крутящий момент (CW) = x (30 Н)Эти два момента должны быть сбалансированы,
крутящий момент (CW) = крутящий момент (CCW)x (30 Н) = (100 - x) (10 Н)
30 х = 1000 - 10 х
40 х = 1 000
х = 25
x = 25 см
Теперь, когда ответы уже есть, это интересно и полезно снова вычислить крутящие моменты относительно центра масса.
крутящий момент (CW) = крутящий момент (CCW)(25 см) (30 Н) = (75 см) (10 см)
И мы видим, что крутящие моменты действительно уравновешиваются - поскольку они должен.
Pb 7.3 Масса породы 1 кг. Какая масса мерной линейкой, если она уравновешена опорной силой на четверть знака?
Центр масс измерительной линейки находится в половина метки, четверть длины клюшки за пределами стержень .
Палка уравновешивается камнем массой 1 кг, что составляет четверть его длина слева и от собственного веса, который находится в центре массы, одна кварта его длины вправо. Следовательно, масса Палка должна быть килограмм, 1 кг.
Типичные вопросы или вопросы с несколькими вариантами ответов:
1. Лошади, движущиеся с максимальной линейной скоростью по карусели расположены
A) ближе к центру
B) ближе к краю
C) всегда белый
D) перед более медленными
2.Промышленный маховик имеет большую инерцию вращения, когда большая часть его массы
A) ближе к оси
B) ближе к ободу
C) равномерно распределены
Г)
3. Цилиндр и кольцо скатываются по склону, начиная с одного и того же. время. Тот, кто первым достигнет дна, будет
.A) цилиндр
Б) кольцо
C) ни; они оба достигают дна одновременно
Г)
4.При попытке повернуть гаечный ключ наденьте трубку на конец гаечного ключа. упорная гайка на болте, чтобы эффективно сделать ручку гаечного ключа дважды пока вы увеличите крутящий момент на
А) два
Б) четыре
C) восемь
D) шестнадцать
5. Когда крутящаяся фигуристка подносит руки внутрь, ее частота вращения
A) увеличивается
B) уменьшается
C) остается прежним (или сохраняется)
Г)
6.Чтобы вывернуть стойкий винт, лучше всего использовать отвертку, имеет ручку
A) длинный и тонкий
B) толстый или широкий
C) желтый
D) скользкая
7. Камень весом 1 кг подвешен на конце метровой палки на Отметка 0 см, чтобы измерительная линейка балансировала, как качели, когда точка опоры находится на отметке 25 см. Исходя из этой информации, какова масса счетчика?
A) 0,25 кг
Б) 0.50 кг
C) 1,00 кг
D) 2,00 кг
8. Автомобиль движется по кругу с постоянной скоростью. Чистая сила на машина
A) направлен вперед по ходу движения.
B), направленный к центру кривой.
C) ноль потому что машина не разгоняется.
D) направлен наружу, от центра кривой
9. Один конец длинного форменного бревна приподнят до уровня плеч.Еще одно такое же бревно приподнято по центру на такой же уровень. Для поднятия второго бревна требуется около
A) вдвое меньше работы
Б) работа та же
C) вдвое больше работы
D) работы в четыре раза больше
Ответы на типичный или возможный множественный выбор вопросы:
1. Лошади, движущиеся с максимальной линейной скоростью по карусели расположены
A) ближе к центру
B) ближе к краю
C) всегда белый
D) перед более медленными
2.Промышленный маховик имеет большую инерцию вращения, когда большая часть его массы
A) ближе к оси
B) ближе к ободу
C) равномерно распределены
Г)
3. Цилиндр и кольцо скатываются по склону, начиная с одного и того же. время. Тот, кто первым достигнет дна, будет
.A) цилиндр
Вращательная масса кольцо - со всей массой на краю - это I = m г 2 .
Вращательная масса твердого тела диск или цилиндр - с массой, распределенной по всей цилиндр или диск - это I = ( 1 / 2 ) м г 2 .
То есть цилиндр имеет меньшую вращательная масса. Это означает, что он - цилиндр - победит; Это быстрее скатится по наклонной плоскости и достигнет дна первый.
Б) кольцо
C) ни; они оба достигают дна одновременно
Г)
4.При попытке повернуть гаечный ключ наденьте трубку на конец гаечного ключа. упорная гайка на болте, чтобы эффективно сделать ручку гаечного ключа дважды пока вы увеличите крутящий момент на
A) два
крутящий момент = вращающая сила = сила x плечо рычага
Если сделать плечо рычага дважды как здорово, увеличиваем крутящий момент вдвое.
Б) четыре
C) восемь
D) шестнадцать
5.Когда крутящаяся фигуристка подносит руки внутрь, ее частота вращения
A) увеличивается
угловой момент = константа
угловой момент = угловой импульс
(вращательная масса) x (ротационный скорость) =
= (ротационный масса) x (вращательное скорость)
B) уменьшается
C) остается прежним (или сохраняется)
Г)
6.Чтобы вывернуть стойкий винт, лучше всего использовать отвертку, имеет ручку
A) длинный и тонкий
B) толстый или широкий
крутящий момент = вращающая сила = сила x плечо рычага
C) желтый
D) скользкая
7. Камень весом 1 кг подвешен на конце метровой палки на Отметка 0 см, чтобы измерительная линейка балансировала, как качели, когда точка опоры находится на отметке 25 см.Исходя из этой информации, какова масса счетчика?
A) 0,25 кг
B) 0,50 кг
C) 1,00 кг
Здесь помогает диаграмма; см. домашнее задание , Pb 7.1.
D) 2,00 кг
8. Автомобиль движется по кругу с постоянной скоростью. Чистая сила на машина
A) направлен вперед по ходу движения.
B) направлен к центру изгиб.
Эта чистая сила равна называется «центростремительная сила».
C) ноль потому что машина не разгоняется.
D) направлен наружу, от центра кривой
9. Один конец длинного форменного бревна приподнят до уровня плеч. Еще одно такое же бревно приподнято по центру на такой же уровень. Для поднятия второго бревна требуется около
A) вдвое меньше работы
| Вернуться на домашнюю страницу 3050-х | Назад к календарю | ToC, Ch 7 | Ch 8, Gravity |Б) работа та же
C) вдвое больше работы
Подъем конца бревна до высоты плеча поднимает только центр масс до половины этой высоты.Поднимая центр второго бревна, чтобы высота плеч поднимает центр масс до полного плеча высота, поэтому требуется вдвое больше работы.
D) работы в четыре раза больше
(C) 2003, Дуг Дэвис; все права защищены
10.4: Момент инерции составных форм
\ (\ require {cancel} \ let \ vecarrow \ vec \ Renewcommand {\ vec} {\ mathbf} \ newcommand {\ ihat} {\ vec {i}} \ newcommand {\ jhat} {\ vec {j}} \ newcommand {\ khat} {\ vec {k}} \ DeclareMathOperator {\ proj} {proj} \ newcommand {\ kg} [1] {# 1 ~ \ text {kg}} \ newcommand {\ lbm} [1] {# 1 ~ \ text {lb} _m} \ newcommand {\ slug} [1] {# 1 ~ \ text {slug}} \ newcommand {\ m} [1] {# 1 ~ \ text {m}} \ newcommand {\ km} [1] {# 1 ~ \ text {km}} \ newcommand {\ cm} [1] {# 1 ~ \ text {cm}} \ newcommand {\ мм} [1] {# 1 ~ \ text {mm}} \ newcommand {\ ft} [1] {# 1 ~ \ text {ft}} \ newcommand {\ inch} [1] {# 1 ~ \ text { in}} \ newcommand {\ N} [1] {# 1 ~ \ text {N}} \ newcommand {\ kN} [1] {# 1 ~ \ text {kN}} \ newcommand {\ MN} [1] {# 1 ~ \ text {MN}} \ newcommand {\ lb} [1] {# 1 ~ \ text {lb}} \ newcommand {\ lbf} [1] {# 1 ~ \ text {lb} _f} \ newcommand {\ Nm} [1] {# 1 ~ \ text {N} \! \ cdot \! \ text {m}} \ newcommand {\ kNm} [1] {# 1 ~ \ text {kN} \! \ cdot \! \ text {m}} \ newcommand {\ ftlb} [1] {# 1 ~ \ text {ft} \! \ cdot \! \ text {lb}} \ newcommand {\ inlb} [1] {# 1 ~ \ text {in} \! \ Cdot \! \ Text {lb}} \ newcommand {\ lbperft} [1] {# 1 ~ \ text {lb} / \ text {ft}} \ newco mmand {\ lbperin} [1] {# 1 ~ \ text {lb} / \ text {in}} \ newcommand {\ Nperm} [1] {# 1 ~ \ text {N} / \ text {m}} \ newcommand {\ kgperkm} [1] {# 1 ~ \ text {kg} / \ text {km}} \ newcommand {\ psinch} [1] {# 1 ~ \ text {lb} / \ text {in} ^ 2 } \ newcommand {\ pqinch} [1] {# 1 ~ \ text {lb} / \ text {in} ^ 3} \ newcommand {\ psf} [1] {# 1 ~ \ text {lb} / \ text { ft} ^ 2} \ newcommand {\ pqf} [1] {# 1 ~ \ text {lb} / \ text {ft} ^ 3} \ newcommand {\ Nsm} [1] {# 1 ~ \ text {N} / \ text {m} ^ 2} \ newcommand {\ kgsm} [1] {# 1 ~ \ text {kg} / \ text {m} ^ 2} \ newcommand {\ kgqm} [1] {# 1 ~ \ текст {кг} / \ text {m} ^ 3} \ newcommand {\ Pa} [1] {# 1 ~ \ text {Pa}} \ newcommand {\ kPa} [1] {# 1 ~ \ text {kPa} } \ newcommand {\ aSI} [1] {# 1 ~ \ text {m} / \ text {s} ^ 2} \ newcommand {\ aUS} [1] {# 1 ~ \ text {ft} / \ text { s} ^ 2} \ newcommand {\ unit} [1] {# 1 ~ \ text {unit}} \ newcommand {\ ang} [1] {# 1 ^ \ circ} \ newcommand {\ second} [1] { # 1 ~ \ text {s}} \ newcommand {\ lt} {<} \ newcommand {\ gt} {>} \ newcommand {\ amp} {&} \)
Ключевые вопросы
- Откуда берутся уравнения момента инерции для общей площади формы?
- Что такое теорема о параллельности оси?
- Когда вам нужно применить теорему о параллельности осей?
- В какой точке вы найдете моменты инерции наименьшей площади? Что особенного в этом моменте?
В этом разделе мы найдем момент инерции форм, образованных путем комбинирования простых форм, таких как прямоугольники, треугольники и круги, почти так же, как мы это делали для нахождения центроидов в разделе 7.5.
Процедура состоит в том, чтобы разделить сложную форму на ее подформы, а затем использовать формулы центроидного момента инерции из подраздела 10.3.2 вместе с теоремой о параллельных осях (10.3.1) для вычисления моментов инерции деталей и, наконец, объедините их, чтобы найти момент инерции исходной формы.
Метод составных площадей
Для составной формы, состоящей из \ (n \) частей, момент инерции всей формы является суммой моментов инерции отдельных частей, однако момент инерции любых отверстий вычитается из общей суммы положительные области.2 \ right) _i \ text {.} \ Label {MOI-составная-формула} \ tag {10.4.1} \ end {align}
Метод демонстрируется в следующих примерах.
Пример 10.4.1. Балочный дизайн.
У вас есть три \ (\ ft {24} \) длинных деревянных 2 \ (\ times \) 6, и вы хотите прибить их вместе, чтобы получилась максимально жесткая балка. Жесткость балки пропорциональна моменту инерции поперечного сечения балки относительно горизонтальной оси, проходящей через ее центр тяжести. Фактические размеры пиломатериалов номинального размера 2 \ (\ times \) 6 составляют \ (\ inch {1.4 \ end {align *}
\ [(I_x) _2 / (I_x) _1 = 3,61 \ nonumber \]
Двутавровая балка примерно в 3,6 раза жестче, чем многослойная балка. Эта оптимизация использования материалов является причиной того, что мы используем двутавровые балки.
Пример 10.4.2. Т-образная форма.
Найдите момент инерции Т-образной формы относительно осей \ (x \) и \ (y \).
- Ответ
\ begin {align *} I_x \ amp = (I_x) _1 + (I_x) _2 \ amp = \ mm {11.4 \ end {align *}
- Решение
1. Стратегия.
Разделите Т-образную форму на вертикальный прямоугольник \ (\ mm {30} \ times \ mm {60} \) (1) и \ (\ mm {90} \ times \ mm {20} \) горизонтальный прямоугольник ( 2) затем сложите моменты инерции двух частей.
\ begin {align *} I_x \ amp = (I_x) _1 + (I_x) _2 \ amp I_y \ amp = (I_y) _1 + (I_y) _2 \ end {align *}
2. MOI о оси x .4 \ text {.} \ Nonumber \]
3. MOI о оси y .
Мы можем использовать ту же процедуру, чтобы найти момент инерции относительно оси \ (y \), однако обычно удобнее организовать всю необходимую информацию в таблице, чем писать уравнения в явном виде.
Мы будем использовать теорему о параллельности осей для обоих прямоугольников с \ (d \), представляющим расстояние между осью \ (y \) и центроидом детали.4 \ nonumber \]
- Решение
1. Стратегия.
Сначала разделите область на четыре части:
- a \ (\ inch {9} \ times \ inch {3} \) прямоугольник
- a \ (\ inch {6} \ times \ inch {3} \) прямоугольник
- прямоугольник \ (\ inch {3} \ times \ inch {4} \) и
- удаленная четверть круга с радиусом \ (\ inch {3} \).
Затем установите стол и примените теорему о параллельных осях (10. 3h / 12 \)
\ (= 2287 \)Треугольник 2
\ (b = 8, \)
\ (h = 10 \)\ (bh / 2 \)
\ (= 40 \)16.4 \ end {align *} Пример 10.4.5. Интерактивный: составные прямоугольники.
Этот интерактив показывает составную фигуру, состоящую из большого прямоугольника с вычтенным прямоугольником меньшего размера. Вы можете изменить расположение и размер прямоугольников, перемещая красные точки.
Воспользуйтесь интерактивом, чтобы попрактиковаться в вычислении моментов инерции этой формы относительно оси системы \ (x \). Всю необходимую информацию удобно собрать в таблице.
Рисунок 10.4.6. Момент инерции прямоугольникаПрофили из конструкционной стали
Сталь- прочный, универсальный и долговечный материал, обычно используемый для изготовления балок, балок и колонн в стальных конструкциях, таких как здания, мосты и корабли. По возможности проектировщики предпочитают использовать сборную стандартизированную конструкционную сталь , чтобы минимизировать затраты на материалы.
Конструкционная стальдоступна в различных формах, называемых секциями , как показано ниже. К ним относятся универсальные балки и колонны (W, S), конструкционные каналы (C), равные и неравные угловые секции (L), тройники (T), прямоугольные, квадратные и круглые полые структурные профили (HSS), стержни, стержни и пластина.Все доступны в различных размерах от маленьких до огромных. Стальные профили изготавливаются методом горячей или холодной прокатки или изготавливаются путем сварки плоских или изогнутых стальных листов.
Рисунок 10.4.7. Стандартные сечения AISC: слева направо - широкий фланец (W), американский стандарт (S), канал (C), равный угол (L), неравный угол (L), структурный тройник (T), прямоугольник (HSS) , Квадратный (HSS), круглый (HSS).
Конструкторы и инженеры должны выбрать наиболее подходящую и экономичную секцию, которая может выдерживать потенциальные нагрузки на растяжение, сжатие, сдвиг, скручивание и изгиб.Таблицы свойств стандартных стальных профилей опубликованы Американским институтом стальных конструкций и используются для упрощения процесса. Таблицы содержат важные свойства секций, включая размеры, площадь поперечного сечения, вес на фут и момент инерции относительно вертикальной и горизонтальной осей. Сокращенный набор таблиц AISC доступен в Приложении C.
В этом разделе мы будем использовать информацию в таблицах AISC, чтобы найти моменты инерции стандартных сечений, а также составных форм, включающих стандартные сечения.
Верхняя и нижняя части двутавровой балки называются фланцами. Средняя часть называется сетью. Фланцы принимают на себя большую часть внутренних сил сжатия и растяжения, поскольку они расположены дальше всего от нейтральной оси, а перегородка в основном действует, чтобы поддерживать любые силы сдвига и удерживать два фланца отдельно. Поперечная ось, проходящая через центр тяжести поперечного сечения, называется нейтральной осью, а плоскость сечения луча на нейтральной оси называется нейтральной плоскостью или нейтральной поверхностью.Эта поверхность не удлиняется и не укорачивается при изгибе.
Рисунок 10.4.8. Номенклатура балок
Пример 10.4.9. Сборная балка.
Составная балка состоит из двух углов L8 \ (\ times \) 4 \ (\ times \) 1/2, прикрепленных к пластине 8 \ (\ times \) 1, как показано. Определить
а. расстояние от оси \ (x \) до нейтральной оси, которая проходит через центр тяжести комбинированной формы, и
г. момент инерции комбинированной формы относительно нейтральной оси.4 \ end {align *}
- Решение
1. Стратегия.
Определите свойства подфигур по отношению к оси \ (x \), а затем используйте их, чтобы найти нейтральную ось.
Используйте теорему о параллельности осей, чтобы найти момент инерции деталей относительно нейтральной оси.
Воспользуйтесь тем фактом, что два угла идентичны и расположены одинаково.
2.4 \ text {.} \ End {align *}
Найдите расстояние до нейтральной оси
\ begin {align *} \ bar {y} \ amp = \ frac {\ sum A_i \ bar {y_i}} {\ sum A_i} = \ frac {2 A_ \ text {L} \ bar {y} _ \ текст {L} + A_ \ text {R} \ bar {y} _ \ text {R}} {2 A_ \ text {L} + A_ \ text {R}} \\ \ amp = \ frac {2 (4.75 ) (1,98) + (4) (- 0,5)} {2 (4,75) + 4} \\ \ bar {y} \ amp = \ inch {1,245} \ text {.} \ End {align *}
3. Найдите момент инерции.
Расстояние между нейтральной осью и центроидами частей составляет
\ begin {align *} d_ \ text {R} \ amp = | \ bar {y} - \ bar {y} _ \ text {R} | = | 1.4 \ text {.} \ End {align *}
Get Back 'Документальный фильм Disney + - это не то, что нам нужно
Новый трехсерийный восьмичасовой документальный фильм режиссера Питера Джексона «The Beatles: Get Back», который выходит в эфир на Disney + с четверга, добавляет еще больше навязчивых и утомительных деталей к фильму история группы, которая постоянно документировалась более 50 лет назад.
И, как и сами Битлз, к тому времени, когда финальная серия затянется к концу, зрители, вероятно, будут готовы, наконец, бросить курить.
Действительно ли хорошей группе нужны бесконечные документальные фильмы, рассказывающие о каждой отрыжке и бесцельных переговорах ее участников?
В начале 1969 года Битлз находились в кризисе. Их менеджер Брайан Эпштейн (которого они все еще называли «мистером Эпштейном») умер. Никто другой не мог сказать «нет» ни одному из четырех самых успешных музыкантов на Земле. В отчаянной попытке вернуть былую искру сотрудничества, Пол Маккартни предложил потренироваться на отработке новых песен без студийных уловок и наложений, чтобы треки звучали и воспроизводились вживую, как на их ранних альбомах.
Сессии были сняты Майклом Линдси-Хоггом для документального фильма, который в 1970 году стал фильмом Let It Be. Для нового документального фильма Джексон вернулся к 55 часам отснятого материала, чтобы создать, по сути, (чрезвычайно) расширенную версию.
Во время сессий в начале 1969 года гитарист Джордж Харрисон жаловался на неутешительный результат. «Это похоже на то же самое старое дерьмо», - сказал он. Это разочарованное восклицание также действует как непреднамеренная критика документального фильма Джексона.
Главный вывод из нового материала должен состоять в том, что Битлз в то время не ненавидели друг друга так сильно, как предполагалось ранее. Да, мы видим момент, когда Харрисон, раздраженный контролирующими требованиями Маккартни, покидает группу на несколько дней.
Но есть также много кадров, на которых группа тусуется и хихикает, играя ранние рок- и поп-композиции Томми Такера, Артура Крадапа и Everly Brothers. Неугомонная выходка плохого парня Джона - пение со скандинавским акцентом, превращение каждой мелодии в водевиль с пронзительным хрипом - воспринимается не столько язвительным, сколько глупым приподнятым настроением.Остальным участникам группы это нравится.
Смена интерпретации интересна фанатикам Битлз, которых очень много. Но даже люди вроде меня, которым нравится музыка группы, скорее всего, сочтут большую часть дополнительного времени утомительным.
«Битлз: возвращайся». Disney +Сцены бесконечных бессвязных споров и бессмысленных подшучиваний заставляют вас чувствовать, что вы застряли в каком-то адском слиянии низкокачественных подкастов и корпоративных заседаний совета директоров. В одном особенно неудобном эпизоде Маккартни читает / поет вслух негативный пресс-релиз, в то время как другие играют.Это должно показать, что он безразличен и равнодушен. Но это выглядит как бессмысленное и унизительное упражнение в самобичевании.
Даже музыка становится неким мучением, когда она растягивается на восемь часов. «Get Back» и «I’ve Got a Feeling» - солидные песни. Шмальцовые баллады Маккартни, такие как «Let It Be», по-прежнему красивы. Рок-н-ролльный скиффл «One After 909» со вкусом ретро-музыки до сих пор заставляет задуматься. Но, несмотря на то, что они хорошо составлены, песни в целом просто не выдерживают этой навязчивой проверки.
К пятому, 10 или 30-му прогону вы (как и группа) готовы никогда их больше не слышать.
Сцены бесконечных бессвязных споров и бессмысленных подшучиваний заставляют вас чувствовать, что вы застряли в каком-то адском слиянии низкокачественных подкастов и корпоративных заседаний совета директоров.
Единственный момент на сеансах, который кажется действительно захватывающим и новым, - это когда будущая жена Леннона, Йоко Оно, подходит к микрофону, чтобы сыграть джем, и начинает кричать, как раненое существо, рожающее.Леннон на гитаре и Маккартни на барабанах внезапно наполняются демоническим вдохновением. Звук обратной связи и визг на мгновение заставляют звучать так, будто они принадлежат тому же году, что и такие современники, как Velvet Underground, Captain Beefheart и Led Zeppelin. Они смотрят не только назад, на Чака Берри, но и в будущее панка, металла, без волн и шума.
Леннон продолжил изучение этого направления в своем сотрудничестве с Оно после того, как Битлз распались год спустя.Но когда он лениво предлагает включить запись самого «Let It Be», все выглядят смущенными.
The Beatles были пионерами в области поп-студийных экспериментов, концептуальных альбомов и тяжелой музыки в 60-х годах. Но к 1969 году они уже не были в авангарде какого-либо конкретного музыкального движения - и, похоже, не хотели им быть. Их последние альбомы отмечаются, как и все остальные, по некой критической инерции. Но современники, такие как Слай Стоун, Майлз Дэвис, Black Sabbath, Вашти Буньян и, если уж на то пошло, Оно и Билли Престон, которые играли на сессиях «Let It Be», продвигали рок в направлении, которое Битлз, по крайней мере, как коллектив. , просто не мог собраться с силами, чтобы исследовать.
Нет ничего постыдного в том, чтобы быть просто хорошей группой, а не лучшей, самой важной и ослепительной группой в данный момент времени. Но действительно ли хорошей группе нужны бесконечные документальные фильмы, описывающие каждую отрыжку и бесцельные переговоры ее участников?
Джексон - важный и популярный режиссер.