
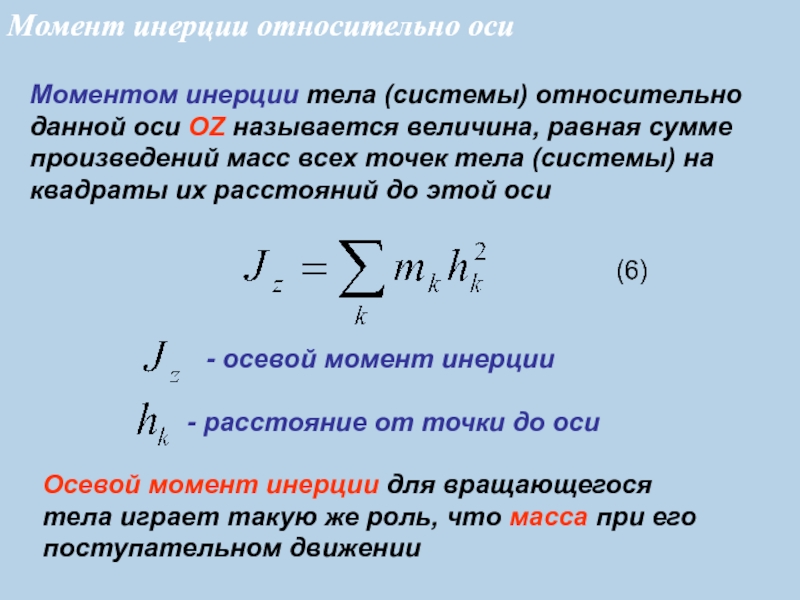
Момент инерции материальной точки
Для динамического описания движения материальной точки по окружности используют следующие величины: момент силы (), момент импульса () и момент инерции (J). При этом основной закон динамики вращательного движения записывают в виде:
Кроме этого, описывая движение по окружности вместо радиус-вектора () пользуются углом поворота (), вместо вектора скорости () используют вектор угловой скорости ().
Момент инерции
Роль массы при движении по окружности материальной точки выполняет момент инерции (J), который равен:
где r- расстояние от материальной точки до оси вращения. Для материальной точки, которая движется по окружности, момент инерции является постоянной величиной. При этом изменение момента импульса происходит только за счет изменения угловой скорости:
Используя момент инерции основное уравнение динамики (1) для движения материальной точки по окружности можно записать как:
где – угловое ускорение материальной точки. Уравнение (4) отражает тот факт, что при движении материальной точки по окружности, момент силы исполняет роль силы (в поступательном движении), момент инерции – роль массы, угловое ускорение – роль линейного ускорения. Это легко увидеть, если записать второй закон Ньютона и сравнить его с уравнением (4):
Уравнение (4) отражает тот факт, что при движении материальной точки по окружности, момент силы исполняет роль силы (в поступательном движении), момент инерции – роль массы, угловое ускорение – роль линейного ускорения. Это легко увидеть, если записать второй закон Ньютона и сравнить его с уравнением (4):
Мерой инертности материальной точки при движении по окружности служит момент инерции.
Момент инерции является аддитивной величиной. Это означает то, что если в системе не одна, а несколько материальных точек, то момент инерции системы (J) равен сумме моментов инерции () отдельных точек:
где – масса ой материальной точки; расстояние от данной материальной точки до оси вращения. Момент инерции системы материальных точек зависит от распределения этих точек в пространстве. Чем ближе материальные точки находятся от оси вращения, тем меньше момент инерции данной системы. У твёрдых тел, которые можно представить как непрерывную совокупность материальных точек, момент инерции относительно оси является постоянной величиной.
Примеры решения задач
4.2 Расчет суммарного момента инерции механизма. Ступенчатое регулирование скорости тягового органа ленточного конвейера 2ЛУ-120
Похожие главы из других работ:
Анализ и синтез узлов машинного агрегата
2.5.7 Расчёт суммарного приведённого момента звеньев в i-том положении
, где К – коэффициент соотношения, К = 1,76; щ1 – угловая скорость, щ = 9 с-1; mп – масса ползуна, m = 51,56 кг; Vni – скорость ползуна в i-том положении. Полученные значения заносятся в таблицу 3. 2…
Двухдвигательный привод эскалатора
1. Определение статического момента и момента инерции, действующих на валу главного привода
Радиус приведения: м — радиус приведения. Dнач – диаметр начальной окружности приводной звездочки; — передаточное число системы; с-1 — расчетная скорость вращения двигателя; — скорость движения лестничного полотна. Рис. 3. Силы…
Исследование динамической нагруженности машинного агрегата легкового автомобиля
3.
 8 Составление схемы алгоритма расчёта переменной составляющей приведенного момента инерции и состовляющих. Расчёт и составляющих и расчёт контрольных положений
8 Составление схемы алгоритма расчёта переменной составляющей приведенного момента инерции и состовляющих. Расчёт и составляющих и расчёт контрольных положенийИсследование кривошипно-ползунного механизма
4.1 Построение диаграммы суммарного приведенного момента от действия сил полезного сопротивления и сил тяжести
кривошипный ползунный механизм кулачковый При определении момента инерции маховика вместо исследования всей машины под действием заданных сил рассмотрим действие приведенных сил только на одно ведущее звено – звено приведения с переменным…
Кинематический, силовой и динамический расчёт механизма качающегося конвейера
2.5 Определение приведенного момента инерции механизма
Расчет приведенного момента инерции механизма выполняется с помощью уравнения приведенного момента инерции механизма (2.
Механизм насоса с качающейся кулисой
2.7 Определение кинетической энергии и приведенного момента инерции механизма
Кинетическая энергия механизма равна сумме кинетической энергии звеньев: Тмех=?Тi Для механизма насоса с заданными параметрами кинетическая энергия звена равна: ?Тi=Т3+Т5= Где JO2==12?0,352/3=0,49 кг?м2 JO2==30?0,1552/3=0,24 кг?м2 Т3=(0,49+0,24)?4,942/2=8…
Общие методы кинематического и динамического анализа и синтеза механизмов
1.4 Определение приведенного момента инерции звеньев механизма
Приведенный момент инерции определяется по формуле: где mi – масса i – звена; Vi – скорость центра масс i-звена; Ji – момент инерции i-звена; i – угловая скорость i-звена; 1 – угловая скорость звена 1. Для рассматриваемого механизма уравнение (1.4…
Проектирование механизмов поперечно-строгального станка
2.
 7 Определение кинетической энергии и приведённого момента инерции механизма
7 Определение кинетической энергии и приведённого момента инерции механизмаКинетическая энергия механизма равна сумме кинетических энергий звеньев, составляющих механизм, и рассматривается для первого положения механизма. где -момент инерции кулисы, За звено приведения принимаем кривошип…
Проектирование редуктора для следящего электромеханического привода
2.5 Нахождение суммарного момента Мн нагрузки на выходном валу редуктора
Мн = Ми + Мс Ми = Jн * Емах. вых. = 0,4 * 5 = 2 Нм Мн = 2 + 1,2 = 3…
Разработка конструкции сварной балки со свободно опертыми концами
5.1.8 Определение момента инерции относительно оси, проходящей через центр тяжести суммарного сечения
Момент инерции относительно оси, проходящей через центр тяжести суммарного сечения, определим по формуле: где – момент инерции относительно оси, совпадающей с верхней кромкой пояса…
Расчет автотракторного двигателя внутреннего сгорания (прототип СМД-62)
4.
 2.3 Расчет момента инерции и параметров маховика
2.3 Расчет момента инерции и параметров маховикаСтроится график тангенциальной силы T = f(б), действующей на шатунную шейку коленчатого вала от одного цилиндра за рабочий цикл. Значения силы T при различных углах поворота коленчатого вала берутся из предыдущих расчетов…
Расчет и конструирование лифтов и комплектующего их оборудования
2.5 Расчёт приведённого момента инерции поступательно движущихся частей лифта
– с 1 по 4 режимы – с 5 по 8…
Расчет и конструирование поршневого компрессора
2.2.3 Построение диаграммы суммарного противодействующего момента
В рабочих полостях компрессора происходит изменение давления газа и, следовательно, сил, действующих на поршни со стороны газа при вращении вала. Переменными в этом случае будут также силы инерции и силы трения поршней о стенки цилиндров…
Расчет привода сепаратора
7. Расчёт приведённого к валу двигателя момента инерции рабочей машины
Приведенный к валу электродвигателя момент инерции системы J, кг•м2 определяется по формуле: (7. 1) где k – коэффициент, учитывающий момент инерции механической передачи, k = 1.05 – 1.2 Jд – момент инерции ротора электродвигателя…
1) где k – коэффициент, учитывающий момент инерции механической передачи, k = 1.05 – 1.2 Jд – момент инерции ротора электродвигателя…
Расчет схемы кулачкового механизма трактора с коромысловым толкателем
3.5.5 Определение постоянной части приведенного момента инерции и момента инерции маховика
В основу расчета положен метод Мерцалова…
Александров М.П. и др.. Грузоподъёмные машины. Учебник. Часть 2. Страница 49
Характер разгона поворотной части крана с грузом в период пуска зависит прежде всего от момента, создаваемого двигателем, а также от значения вращающихся масс и расположения этих масс относительно соответствующих осей их вращения. При создании двигателем момента, превышающего момент статических сопротивлений, избыточный момент (т. е. разница моментов, создаваемых двигателем и статическими сопротивлениями) вызывает соответствующее угловое ускорение вращающихся масс механизма поворота, поворотной части крана и груза.
Таким образом, момент двигателя, необходимый для преодоления сил инерции вращающихся масс,
где M1, M2 и M3 — моменты, приведенные к валу двигателя соответственно от сил инерции вращающихся масс механизма поворота крана, силы инерции массы груза и сил инерции масс поворотной части крана.
Момент M1 определяют с учетом инерционных нагрузок вращающихся элементов механизма. Вращающиеся массы на второй, третьей и последующих ступенях передачи оказывают незначительное влияние на суммарный момент от сил инерции вращающихся масс механизма поворота, поэтому принято включать в расчет только массу ротора двигателя, массу привода с частотой вращения ротора, несколько увеличив этот момент:
где J1 — момент инерции ротора, муфты и первого вала редуктора; dasjdt, — угловое ускорение ротора двигателя в период пуска.
Вследствие изменения частоты вращения якоря двигателя в период пуска по линейному закону угловое ускорение можно принять постоянным:
где Ii1 — частота установившегося вращения ротора двигателя об/мин; (п — время разгона (пуска) механизма до установившейся частоты вращения механизма, с.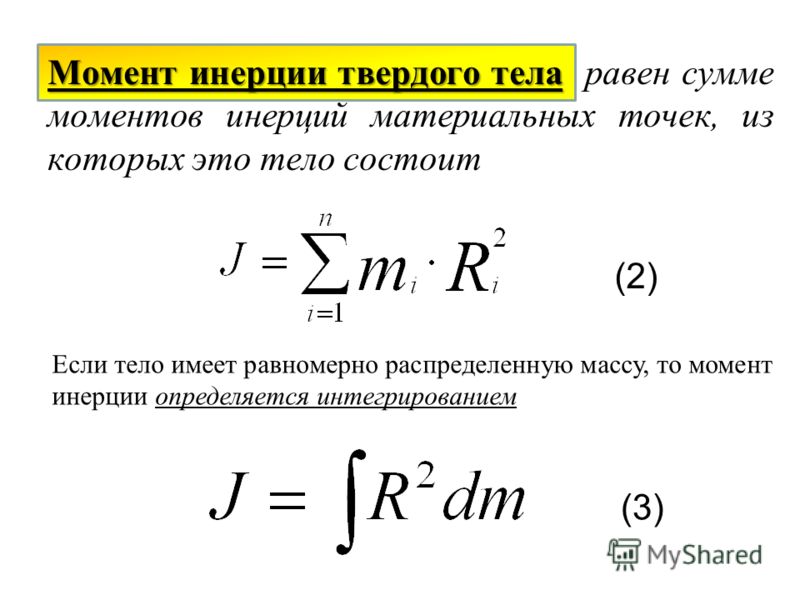
Для определения момента M2 следует определить момент от силы инерции груза массой Q относительно оси вращения крана
Выбор двигателя механизма поворота крана с учетом изменяющейся нагрузки, режимов работы механизмов, системы управления и других показателей является сложной задачей, рассматриваемой в специальных курсах, поэтому ограничимся несколько упрощенной методикой определения мощности электродвигателя. Момент Ліс от статических сил сопротивления состоит из постоянного момента Мтр от сил трения поворотной части крана и переменных моментов Mylt и Mb от сил сопротивления от уклона и ветровой нагрузки рабочего состояния крана, изменяющихся в зависимости от положения поворотной части крана относительно направления этих нагрузок.
Для получения среднеквадратичных переменных значений моментов в пределах поворота крана на угол 90° можно принять среднеквадратичный момент сил сопротивления от сил сопротивления от уклона крана относительно оси вращения крана Мск.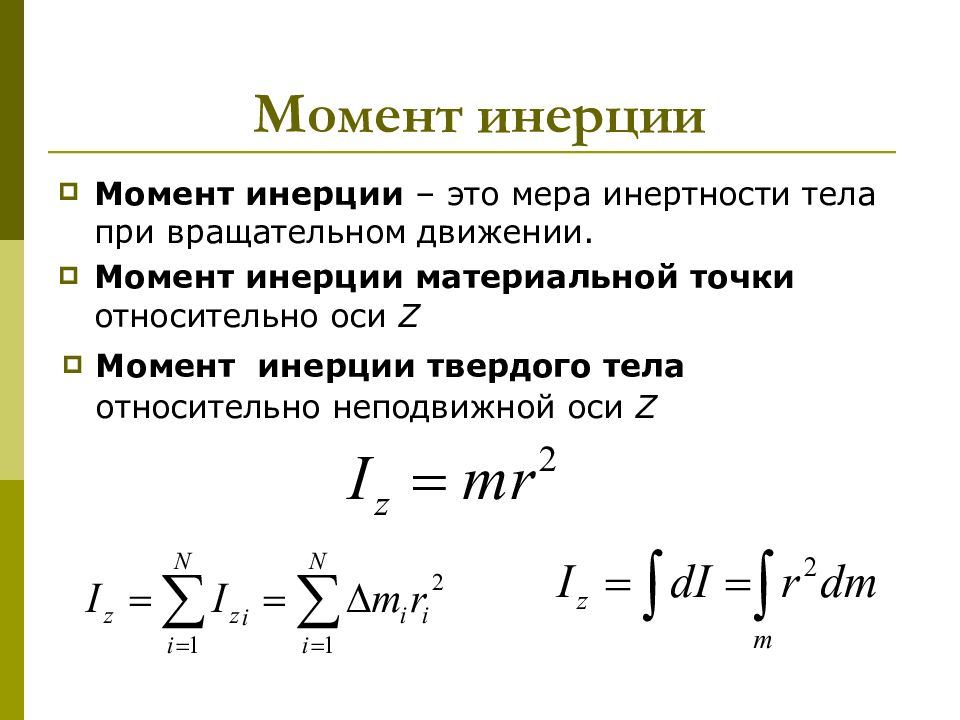 ук « ~ OJMraaxук (здесь Mmaxyn — наибольшее значение момента от сил сопротивления от уклона крана относительно той же оси) и среднеквадратичный момент Мск. в « 0,7Мтахв от сил сопротивления, создаваемых ветровой нагрузкой относительно той же оси (здесь Mmaxs — наибольшее значение момента от сил сопротивления ветровой нагрузке относительно той же оси).
ук « ~ OJMraaxук (здесь Mmaxyn — наибольшее значение момента от сил сопротивления от уклона крана относительно той же оси) и среднеквадратичный момент Мск. в « 0,7Мтахв от сил сопротивления, создаваемых ветровой нагрузкой относительно той же оси (здесь Mmaxs — наибольшее значение момента от сил сопротивления ветровой нагрузке относительно той же оси).
Момент сил приведенный – Энциклопедия по машиностроению XXL
При изучении динамики механизмов с упругими звеньями обычно оперируют динамически эквивалентной моделью. Параметры динамической модели—это приведенные расчетные массы, моменты инерции, жесткости, коэффициенты сопротивления, приведенные силы и моменты сил. Приведенные параметры модели определяются по условиям их энергетической эквивалентности параметрам реальной системы. [c.442]Работа сип и моментов сил.
 Приведенная сила. Приведенный момент силы
[c.290]
Приведенная сила. Приведенный момент силы
[c.290]Приведенные моменты сил. Приведенным к главному валу (звену приведения) моментом каких-либо сил (движущих, полезного сопротивления и т. д.), приложенных к звеньям машины, называют момент пары сил, условно приложенный к главному валу, мгновенная мощность которого в данном положении машины равна сумме мгновенных мощностей этих сил в том же положении машины. [c.175]
Составим уравнение моментов сил, приведенных на рис. 31.3, б относи-гельно полюсов OiH 0 . [c.366]
Суммарный приведенный момент сил (приведенный момент сил) — условный момент пары сил, развивающий мощность, равную сумме мощностей сил и моментов пар сил, действующих на звенья механизма. Направление приведенного момента сил принимают совпадающим с направлением угловой скорости звена приведения. Таким образом, суммарный приведенный момент сил заменяет все силы и мощности, приложенные к различным звеньям механизма.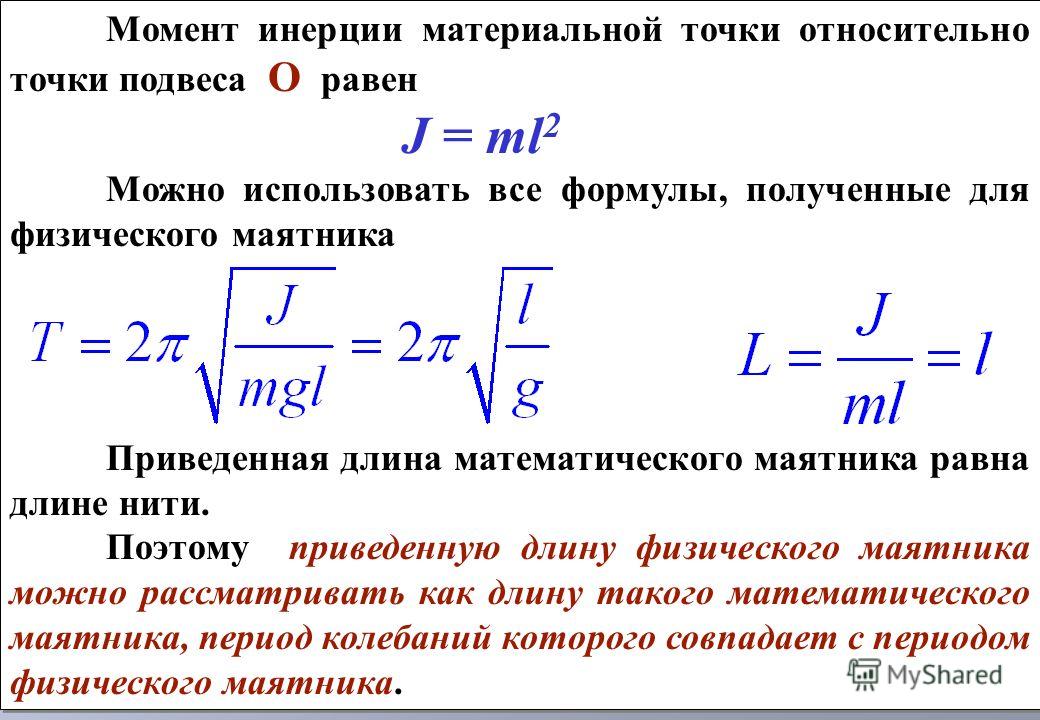 Значение его определяют по зависимости, которую в соответствии с приведенной выше формулировкой и принятыми обозначениями записывают так
[c.239]
Значение его определяют по зависимости, которую в соответствии с приведенной выше формулировкой и принятыми обозначениями записывают так
[c.239]
Из формул (14.1), (14.2), (14.4) и (14.5) следует, что приведенная сила или приведенный момент сил зависят от отношения скоростей ведомых звеньев к скорости звена приведения, приведенная масса или приведенный момент инерции зависят от отношения квадратов этих же скоростей. [c.125]
Приведенный момент (сила), который стремится ускорить движение ведущего звена, называется движущим моментом, а приведенный момент (сила), который стремится замедлить движение ведущего звена, наз , вается моментом сопротивления. [c.131]
S . Приведенные моменты сил движущих и сил сопротивления зависят от механических характеристик машин, вошедших в агрегат. Механической характеристикой машины называется зависимость сил или моментов, приложенных и ее звеньям, от кинематических величин, характеризующих движение этих звеньев (перемещений, скоростей или ускорений). [c.131]
[c.131]
Во всех задачах настоящего параграфа предполагаются известными или пред-вар п льно найденными следующие величины приведенный момент движущих сил Л1д, приведенный момент сил сопротивления М , приведенный момент инерции / , также начальные значения угла фо и угловой скорости о звена приве-де 1ия [c.135]
Примеры. Пример I. Силы, приложенные к механизму, и его массы приведены к звену АВ (рис. 81, а). Приведенные момент движущих сил Мд и момент сил сопротивления изменяются в течение первых пяти оборотов звена А В в соответствии с графиком на рис. 81, б. Приведенный момент инерции 1 постоянен и равен / = 0,1 кгм . При угле ф, равном нулю, угловая скорость (О звена А В также равна нулю. Требуется определить величину угловой скорости (О звена АВ через пять оборотов от начала его движения. [c.140]
В некоторых задачах приведенный момент движущих сил мол т быть заданным зависящим от угловой скорости звена приведения, Л1д = Мд (w), а приведенный момент сил сопротивления либо остается постоянным в пределах исследуемого интервала, либо зависит от угла f звена приведения, = Л1(. (ф).
[c.164]
(ф).
[c.164]
В нашем случае работа сил давления газа на поршень — это то же самое, что и работа приведенного момента сил сопротивления. Поэтому упомянутая мощность будет равна [c.171]
Силы, приложенные к машинному агрегату, и его массы приведены к звену АВ. Движение агрегата установилось. Один цикл установившегося движения соответствует углу фц = 2я. Приведенный момент сил сопротивления изменяется согласно ра4 Ику, а приведенный момент движущих сил Мд постоянен на всем цикле установившегося движения. Приведенный момент инерции масс звеньев машинного агрегата постоянен и равен / = = 0,2 кгм . Средняя угловая скорость звена АВ равна = ЗОсе/с . [c.171]
ЦИКЛ установившегося движения соответствует углу (p,i — 2 . Приведенный момент сил сопротивления изменяется согласно графику, а приведенный момент движуш,их сил постоянен на всем цикле установившегося движения. Приведенный момент инерции масс звеньев машинного агрегата постоянен и равен / = 0,014 кгм средняя угловая скорость звена приведения (0(. р — 25 eл .
[c.172]
р — 25 eл .
[c.172]
Силы, приложенные к машинному агрегату, и его массы приведены к звену АВ. Движение агрегата установилось. Один цикл установившегося движения соответствует углу фц = 2п. Приведенный момент сил сопротивления изменяется согласно [c.173]
Т. икл установившегося движения агрегата делится на две части рабочий ход, происходящий при угле поворота вала двигателя фр = = л, и холостой ход, которому соответствует угол поворота того же вала Фх = 11я. Рабочая машина в первой части цикла (на рабочем ходу) загружена моментом сил сопротивления приведенного к валу [c.175]
Если движущие силы и силы полезного сопротивления приведены к одному и тому же вращающемуся звену, то механический коэффициент полезного действия механизма можно определить как отношение среднего приведенного момента сил полезного сопротивления к среднему приведенному моменту движущих сил W [c.176]
Мы ограничимся рассмотрением случаев, когда звено совершает плоскопараллельное движение и имеет плоскость материальной симметрии, параллельную плоскости его движения. При этом точкой приведения сил инерции авена целесообразно брать его центр масс (рис. 45), так как упрощается выражение момента инерционной пары сил — главного момента сил инерции, что то же, инерционного момента. Он оказывается равным М = -1 г, (9.2)
[c.78]
При этом точкой приведения сил инерции авена целесообразно брать его центр масс (рис. 45), так как упрощается выражение момента инерционной пары сил — главного момента сил инерции, что то же, инерционного момента. Он оказывается равным М = -1 г, (9.2)
[c.78]
Но, как известно, отношения скоростей или передаточные отношения конкретного механизма зависят только от его положения, т. е. от обобщенной координаты звена приведения. Поэтому приведенная сила или приведенный момент и приведенная масса или приведенный момент инерции зависят от положения звена приведения, т. е. они ябляются функцией обобщенной координаты. [c.125]
Покажем решеине задачи о движеЕ1Ии звена приведения при заданных приве.гениом моменте данжущих сил Л1д, приведенном моменте сил сопротивления А с. и приведенном моменте инерции / в виде функций угла ф. [c.135]
В. А. Зиновьеву и М. А Скуридину) о движении звена приведения в случае, когда приведенный момент движущих сил А/д зависит от скорости звена приведения Л1д = = М,(ш), приведенный момент сил сопротивления зависит от угла поворота ф звена приведения М,. = Мс(приведенный момент инерции механизма тоже зависит от э ОГО угла / = / (динамическом исследовании машин1Юго агрегата, состоящего и электродвигателя, коробки скоростей и поперечно-строгального станка, в основу которого входит кулисный механизм Витворта с переменным передаточным отношением. Имеем заданными момент движущих сил Мд == Мд (оз) (рис. 80, а), момент сил сопротивления /М(. = (ф) (рис. 80, б) и приведенный момент инерции механизма / = = 1п (ф) (рис. 80, в) при начальных условиях (О = при Ф = фг.
[c.139]
А Скуридину) о движении звена приведения в случае, когда приведенный момент движущих сил А/д зависит от скорости звена приведения Л1д = = М,(ш), приведенный момент сил сопротивления зависит от угла поворота ф звена приведения М,. = Мс(приведенный момент инерции механизма тоже зависит от э ОГО угла / = / (динамическом исследовании машин1Юго агрегата, состоящего и электродвигателя, коробки скоростей и поперечно-строгального станка, в основу которого входит кулисный механизм Витворта с переменным передаточным отношением. Имеем заданными момент движущих сил Мд == Мд (оз) (рис. 80, а), момент сил сопротивления /М(. = (ф) (рис. 80, б) и приведенный момент инерции механизма / = = 1п (ф) (рис. 80, в) при начальных условиях (О = при Ф = фг.
[c.139]
Рис. 85. к примеру 4. Определение aaKOEia движения звена приведения при моменте движущих сил, зависящем от угла поворота звена приведения, приведенном моменте инерции, также зависящем от этого угла, и моменте сил сопротивления, равном нулю.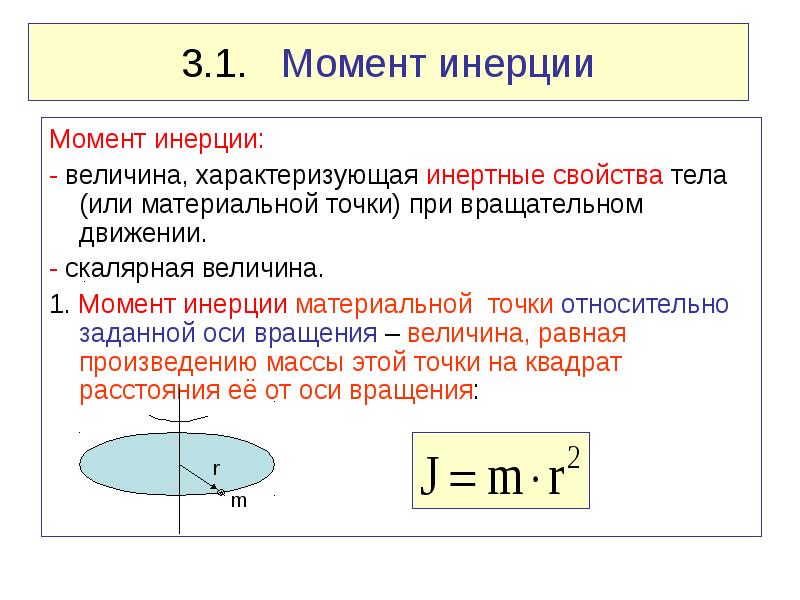 [c.145]
[c.145]
Силы м массы ыашнны приведены к звену АВ. Момент дппжущих сил изменяется согласно графику а), момент сил сопротивления — согласно графику б), приведенный момент инерции постоянен II равен / = 0,314 кгм . При ф = О углоиая скорость [c.154]
Пусть момент движущих сил Мд и момент сил сопротивления изменяются так, кап это показано на рис. 89. В положениях звена приведения, где угол ф его noBopova имеет значения фд, ф, ф ., ф , разность моментов AM = Мд — становится равной пулю и кинетическая энергия Т агрегата имеет экстремальные значения. Очевидно, что именно в этих положениях, при постоянном приведенном моменте инерции, угловая скорость принимает свои экстремальные значения. В положениях звена приведения, где ф = фг, и ф = ф , скорость будет иметь максимальные значения, а в положениях, где ф = ф и ф — ф , она будет иметь минимальные значения. [c.161]
[c.161]
На рис. 90, а построен график приведенного момента движущих сил Л 1д = = (ф) и график приведенного момента сил сопротивле1шя М — (ф), а па рис. 90, б — график приведенного момента инерции / , складывающегося из момента инерции /(, масс звена приведения (без предполагаемого момента инерции маховика) и приведенного момента инерции масс ведомых звеньев машинного ai perara (т. е. = /о + /3)- [c.162]
В тех задачах, где приведенный момент сил сопротивления постоянен, нО в отдельные моменты претерпевает резкое изменение на малом интервале времени или угла ф поворота звена приведения, для решения следует пользоваться следующими соопюшенияами [c.165]
Известно, что приведенный момент двнжуш,их сил Мд изменяется согласно равенству УИд = УИдтах — ссо, где Мд ах = 400 нм, а с = 2,5 нмсек (рис. б). Приведенный момент сил сопротивления Мс задан графиком (рис. в), оричем max = 400 нм. Приведенный момент инерции масс звеньев двигателя и редуктора постоянен и равен /fl = 0,02 кгм . Приведенный момент инерции масс звеньев рабочей машины /3 пренебрежимо мал по сравнению с искомым моментом инерции маховика.
[c.175]
в), оричем max = 400 нм. Приведенный момент инерции масс звеньев двигателя и редуктора постоянен и равен /fl = 0,02 кгм . Приведенный момент инерции масс звеньев рабочей машины /3 пренебрежимо мал по сравнению с искомым моментом инерции маховика.
[c.175]
Влияние электродинамических параметров электродвигателей на надежность, долговечность и управляемость экскаваторов цикличного действия
Н.Н.Киселев, д.т.н., Лауреат Ленинской и Государственной премий Е.М.Садовников, к. т. н.
При открытом способе добычи полезных ископаемых основными выемочно-погрузочными машинами уже давно стали одноковшовые экскаваторы. Главными показателями технического уровня экскаваторов являются их производительность, надежность, удельный расход электроэнергии и металлоемкость. Эти показатели тесно взаимосвязаны и на них оказывают влияние такие факторы как горно- технологические и климатические условия эксплуатации экскаваторов. Они имеют случайный характер, но предопределяют выбор конструктивных и наладочных параметров, а также управляющих воздействий [1].
Они имеют случайный характер, но предопределяют выбор конструктивных и наладочных параметров, а также управляющих воздействий [1].
Общеизвестно, что основные конструктивные параметры экскаватора это геометрическая вместимость ковша, масса рабочего оборудования и его компоновка, передаточное соотношение редукторов рабочих механизмов (выбор рациональной частоты вращения электродвигателей этих механизмов).
Из общего числа факторов, определяющих функционирование комплексной системы «машинист-экскватор-забой» активно могут быть изменены конструктивные, наладочные параметры и управляющие воздействия. В связи с этим, на стадии проектирования должны быть заложены конкретные технические решения, позволяющие повысить эффективность функционирования всей комплексной системы, а на стадии эксплуатации поддерживать оптимальные технические параметры и алгоритмы управления.
Одним из важнейших конструктивных факторов, определяющих первоначальные затраты, величину эксплуатационных расходов (энергия, ремонт оборудования, простои, связанные с ремонтом), удельную металлоемкость, а также компоновку оборудования на поворотной платформе, является выбор рационального передаточного числа редуктора номинальной частоты вращения приводных двигателей главных механизмовподъема, напора (тяги) поворота [1, 2].
Применяемые в настоящее время на многих карьерных экскаваторах высокооборотные электродвигатели (с передаточным отношением редуктора i = 31-40 и более) обеспечивают меньшую их массу (и габариты), рациональную компоновку на поворотной платформе, при необходимых суммарных моментах нагрузки на рабочее оборудование, но при этом значительно увеличивающих крайне нежелательные динамические нагрузки на рабочее оборудование и металлоконструкции экскаватора.
Коэффициент динамики (динамичности) в основном зависит от двух составляющих первой, зависящей от динамических параметров механической системы, и второй, зависящей от величины электромагнитного момента электродвигателя. Момент инерции (GD2) ротора электромотора является очень важным динамическим параметром электрической системы и он всегда приводится в технических характеристиках электромотора.
Как показывает опыт проектирования, анализ и исследования работы одноковшовых экскаваторов [1], одной из важных причин снижения надежности и долговечности работы деталей, узлов и экскаватора в целом является недооценка (при проектировании) влияния значительной и не управляемой кинетической энергии движущихся элементов «силовой цепи» электропривода, определяемой зависимостью
где ∑J суммарный момент инерции электродвигателя, приведенный к моторному валу механизма; ω угловая скорость вращения моторного вала.
Из этой зависимости следует, что снижение максимальных усилий, возникающих в механизме, может быть достигнуто за счет снижения суммарного момента инерции электродвигателей механизма, приведенного к моторному валу и квадрата их угловой скорости вращения.
Поскольку запас суммарной кинетической энергии в основном определяется суммарным моментом инерции якоря электродвигателя и приведенного к моторному валу редуктора, а также их угловой скоростью, то существенное снижение максимальных нагрузок на механизмы может быть достигнуто применением «среднеоборотных двигателей» не только с уменьшением угловой номинальной скорости электродвигателей, но при этом даже с увеличением их номинального момента.
Исходные данные расчета и результаты силовых и динамических параметров экскаваторов различных заводов изготовителей
|
Показатели, их размерность |
УЗТМ |
НКМЗ |
||||
|
ЭКГ-15 |
ЭКГ-20 |
ЭШ-11. |
ЭШ-14.50 |
ЭШ-15.90 |
ЭШ-2.0.90 |
|
|
Количество х мощность двигателей, кВт |
2х500 |
2х560 |
2х500 |
2х500 |
2х680 |
2х1000 |
|
Номинальное число оборотов двигателя,1/мин. |
900 (600) |
500 |
900 (600) |
900 (600) |
750 (630) |
630 |
|
kпуск= Мпуск/Мном |
1.8 |
1. |
1.6 |
1.6 |
1.6 |
1.67 |
|
Суммарный момент инерции электро-двигателей ∑Jэ, кг м2 |
2х30/40/80 |
2х40/80 |
2х30/40/80 |
2х30/40/80 |
2х200/140/280 |
2х140/280 |
|
Суммарный момент инерции механического оборудования JM, кг м2, при: |
69 (53) |
90 |
60 (53) |
60 (53) |
280 (210) |
280 |
|
– весе эл. |
4.2 (6.3) |
6.3 |
4.2 (6.3) |
4.2 (6.3) |
8.2 (8.46) |
8.46 |
|
– передаточном числе редукторов и блочной системы (ip×iбл.) |
30х2(20х2) |
33.7 |
30.1(20) |
30.1(20) |
26.48(22.53) |
22.53 |
|
– диаметре барабана лебедок Dб, м |
1.6 |
1.43 |
1.63 |
1.63 |
1.8 |
1.8 |
|
– скорости дъема Мп, |
1. |
1.08 |
2.58 |
2.58 |
2.65 |
2.65 |
|
– максим. усилии подъема, т |
147 |
176 |
– |
– |
– |
– |
|
– максим. концевой нагрузке, т |
– |
– |
33 |
42 |
47 |
63 |
|
Вес приведенной к ковшу «силовой цепи», Gпр,т |
735(395) |
373 |
197 (113) |
206 (122) |
653(354) |
(370) |
|
Ускорители j до Vп, м/с2 |
0. |
2.1 |
1.3 |
1.3 |
0.6 |
1.84 |
|
Время t выхода на Vп, сек. |
1.53 |
0.5 |
2.0 |
2.0 |
4.5 |
1.5 |
 70
70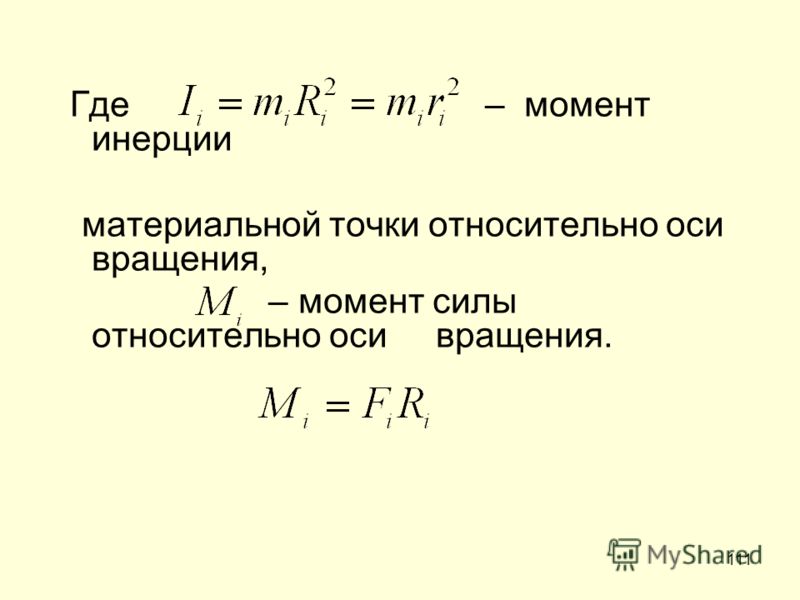 75
75 двигателей Gэ, т
двигателей Gэ, т 1
1 98
98Примечание: значения в скобках учитывают использование среднеоборотных двигателей и соответствующих им пониженных передаточных чисел Данные о приведенном к ковшу весе элементов движущейся «силовой цепи» рассчитаны с использованием формулы приведенного веса Gпр;
где: z количество электродвигателей в «силовой цепи»;
Jэ момент инерции эл. двигателей;
двигателей;
JM= i/30 момент инерции механизмов;
ip передаточное число редукторов;
W передаточное число блоков;
D6 – диаметр барабана, м;
g = 9,81 м/сек2, Рк максим. концевое усилие, т.
Таким образом, с целью снижения динамических нагрузок как на механическое, так и на электрооборудование главных механизмов, а также на металлоконструкции, особенно при черпании крупнокусковой скальной горной массы (и особенно, подготовленной БВР, даже при небольшой доли негабаритов [6]), в условиях низких температур и уменьшения удельного расхода электроэнергии, целесообразно на стадии проектирования рассматривать и решать вопрос о применении среднеоборотных электродвигателей с передаточными числами i редуктора механизма подъема или напора (мехлопат), тяги и подъема (драглайн), соответственно, iт≈30; iп≈18÷20.
Современные способы ручного и автоматического управления механизмами также позволяют несколько снижать максимальные динамические нагрузки [6, 7, 8].
Однако, наибольший эффект может быть достигнут при применении этих способов с использованием среднеоборотных двигателей.
Инерционность вращающихся элементов электродвигателей и приводимых ими механизмов взаимозависимы. Например, при двухступенчатом редукторе с передаточным числом i ?w 30, его приведенный к моторному валу момент инерции примерно равен моменту инерции электродвигателя [2]. При передаточном числе редуктора i >30, его момент инерции будет превышать момент инерции электродвигателя, а при i< 30 момент инерции (приведенный к моторному валу) будет меньше момента инерции электродвигателя. Это вытекает из принципа подобия, из которого следует [3], что масса редуктора, а, следовательно, и его вращающихся элементов, пропорциональна моменту выходного вала. Тогда для предварительных расчетов может быть использована приближенная взаимозависимость моментов инерции редуктора, приведенных к моторному валу
(от передаточного числа ip редуктора применительно к двухступенчатым редукторам мехлопат и драглайнов).
Так, при проектировании и изготовлении карьерной лопаты ЭКГ-20 (УЗТМ) были применены среднеоборотные двигатели для привода подъема (∑N=2 • 560 кВт, n = 500 об/мин с редуктором i = 33,7).
Вместе с тем, при создании Ижорским заводом экскаватора ЭКГ-15 были использованы для привода подъема электродвигатели высокооборотные (EN=2 • 500 кВт, n=900 об/мин с передаточным числом подъемной лебедки
∑i= iлебед.∑Iканатн.блоков=29.74 · 2=60).
Это обуславливает увеличение против приведенного к барабану экскаватора (даже ЭКГ-20), движущейся массы силовой цепи в 1.9 раза на экскаваторе ЭКГ-15, что существенно повышает коэффициент динамичности и ухудшает управляемость.
При создании на УЗТМ ЭШ-20.90 в их приводе поворота применяются средне оборотные двигатели (∑N=4 • 240 кВт; n=360 об/мин.), что позволило исключить возникающую при износе зубьев в венцах вибрацию в повороте, и снизить примерно в 1,5 раза инерционность поворота.
С той же целью на УЗТМ была выполнена модернизация электромеханизмов поворота драглайна ЭШ-15/90 с применением среднеоборотных электродвигателей (пн=460 об/мин и 4N=4 • 210 кВт).
При создании на НКМЗ вскрышной мехлопаты ЭВГ-35/65 (1956-57 гг.), для лебедок подъема и напора, были применены среднеоборотные электродвигатели, соответственно, 220-440 об/мин. и 300 об/мин. (для напора). Это обеспечило снижение динамической составляющей подъема в 1.85 раза и напора в 2.2 раза; эти машины до сих пор успешно работают на Черемховском разрезе.
Исследованиями установлено [9], что основной причиной снижения надежности и долговечности таких машин являлась недооценка (при проектировании) влияния на это значительной кинетической энергии движущихся масс элементов «силовой цепи» (от электродвигателя и канатов до ковша) и, в основном, т.н. «живой силы А» электродвигателей и редукторов. Если существующими средствами машинист-оператор экскаватора может достаточно успешно управлять («дозировать») воздействием на рабочий процесс и нагружение электроэнергией на «силовую цепь», то это невозможно в отношении аккумулирования и использования кинетической ее энергии. Поэтому величина последней должна быть существенно ограничена в оптимальных пределах ее влияния как на рабочий процесс, так и на нагружение «силовой цепи» (электродвигатели-ковш).
Так, даже при отключении оператором воздействия электрической энергии значительная кинетическая энергия (накопленная номинальной угловой и линейной скоростями движения массы «силовой цепи») может привести к недопустимой аварийной величине нагружения и даже к разрушению последней.
Для иллюстрации рациональности ориентации на применение среднеоборотных электродвигателей в экскаваторной технике цикличного действия в таблице приводятся основные сопоставительные данные для расчета силовых и динамических величин по шести экскаваторам цикличного действия, наиболее широко применяемым в карьерах.
Из таблицы видно, что в ЭКГ-15, ЭШ-11/70, ЭШ-14/50 и ЭШ-15/90 применяются высокооборотные электродвигатели. Это обусловило значительные приведенные движущиеся массы электромеханических приводов и, как следствие, повышение динамической нагрузки в «силовой цепи» (электродвигатели-редук-тор-ковш), а также снижение «отзывчивости» управляемости в рабочем процессе экскаваторов.
Полученные результаты расчетов величины приведенного веса к окружности барабана или ковшу, дают основание для следующих соображений.
Столь огромный приведенный движущийся вес и величина кинетической энергии (как, например, 735 т у ЭКГ-15 и 653 т у ЭШ-15/90) будет эпизодически, т.е. при стопорении движения «силовой цепи» вызывать значительные, примерно в 1.5 раза большие, динамические усилия в ней (от электродвигателей до ковша), а также уменьшать «отзывчивость» в управлении, что непременно скажется в снижении надежности, а, следовательно, в производительности экскаваторов.
Применение среднеоборотных электродвигателей позволит существенно (в 2 раза и более) улучшить этот показатель.
Использование среднеоборотных электродвигателей было впервые реализовано специалистами УЗТМ только в выпущенной партии карьерных мехлопат ЭКГ-20 и в сравнительно маломощных электродвигателях ЭШ-20/90, четырехпоточных электроприводах поворота и при его модернизации у ЭШ-15/90.
К сожалению, это принципиально прогрессивное направление не встретило заинтересованности машиностроителей, так как оно неминуемо вызывало увеличение примерно на 50% удельной материалоемкости электродвигателей.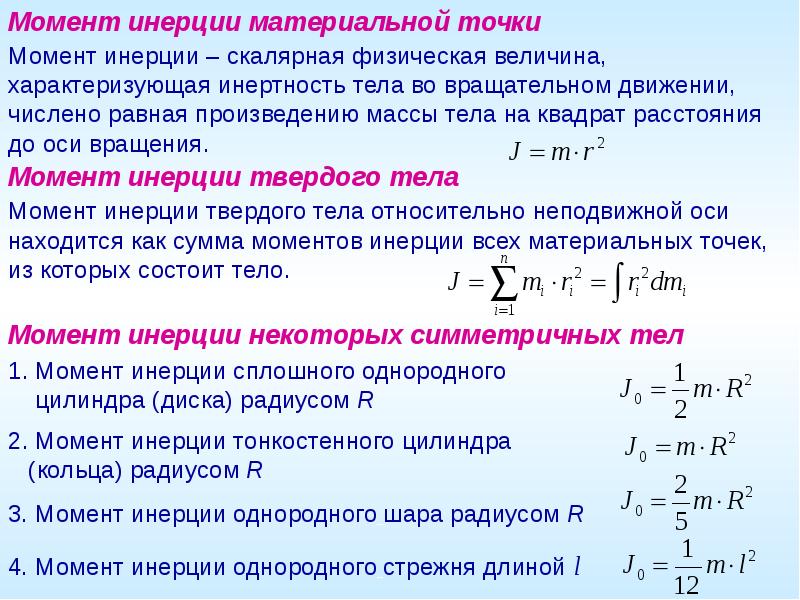 А явную эффективность от применения среднеоборотных электродвигателей за счет снижения динамических нагрузок в «силовой цепи» экскаваторов; увеличения от этого надежности, долговечности, а, следовательно, снижения потерь фонда рабочего времени машины при ремонтных простоях и, наконец, увеличения «отзывчивости» в управлении с повышением от этого производительности, при некотором повышении расхода электроэнергии реально ощутят только потребители экскаваторов, но не изготовители электродвигателей.
А явную эффективность от применения среднеоборотных электродвигателей за счет снижения динамических нагрузок в «силовой цепи» экскаваторов; увеличения от этого надежности, долговечности, а, следовательно, снижения потерь фонда рабочего времени машины при ремонтных простоях и, наконец, увеличения «отзывчивости» в управлении с повышением от этого производительности, при некотором повышении расхода электроэнергии реально ощутят только потребители экскаваторов, но не изготовители электродвигателей.
Это противоречивое обстоятельство, видимо, не может быть разрешено без изменения принципа ценообразования на среднеоборотные электродвигатели. Понятно, что разрешение будет заключаться в повышении цены на них с учетом эффективности их применения в отраслях горнодобывающей промышленности, а не только величины затрат на производство среднеоборотных электродвигателей в электромашиностроении.
Заключение
Для достижения обозначенной в нашей статье цели необходимо экскаваторы цикличного действия оснащать уже на заводе-изготовителе среднеоборотными электродвигателями, как это делает фирма P&H. 150 мм).
150 мм).
Установка таких электродвигате-лей потребует согласования осей вращения электродвигателя и скоростного вала редуктора лебедок. Это может быть осуществлено путем установки редуктора на две поперечные короткие и две продольные балки (высотой около 150 мм) под краевые опорные плоскости. После сборки такие опорные балки должны быть прикреплены сваркой к поверхности платформы как постоянные детали опирания элементов корпусов редукторов лебедок.
Все эти меры позволят снизить коэффициент динамичности примерно в 1.5 раза, что в современных условиях только на повышении долговечности рабочих канатов (расход которых за срок службы машины достигает по стоимости суммы, равной ее цене [9]) обеспечит значительный экономический эффект.
ЛИТЕРАТУРА:
1. Гейлер Л.Б. Электропривод в тяжелом машиностроении. М. Машгиз, 1958, с. 254.
2. Расчет мощности привода подъема ЭШ-10/70. № 8714 Р.Р. НКМЗ, 1972.
3. Многопоточные редукторы. г. Киев, Техника, 1983, с. 28-29.
Многопоточные редукторы. г. Киев, Техника, 1983, с. 28-29.
4. Садовников Е.М. Повышение технического уровня карьерных экскаваторов путем обоснования и выбора конструктивных наладочных параметров и управления взаимодействия. Автореф. канд. дисс. Екатеринбург, 1993.
5. Волков Д.П., Каминская ДА. Динамика электромеханических систем экскаваторов. М., Машиностроение. 1971.
6. Беляков Ю.И. Проектирование экскаваторных работ, М., Недра, 1983.С.80.
7. Справочник механика открытых работ. Под ред. М.И.Щадова, Р.Ю. Подэрни. М., Недра, 1989.
8. Полянский Е.С. Исследование нагрузок в подъемных канатах и стрелах драглайнов. Автореф. канд. дисс.,
М. МИСИ им. В.В.Куйбышева, 1969.
9. Разработка предложений по модернизации экскаваторов с целью повышения надежности и долговечности основных механизмов. Отчет о НИР Г.Б.-92, М., МИСИ им. В.В.Куйбышева.
Отчет о НИР Г.Б.-92, М., МИСИ им. В.В.Куйбышева.
Журнал “Горная Промышленность” №1 2005
Момент инерции сопротивления – Справочник химика 21
Момент инерции Момент сопротивления = рЬ [c.396]Здесь N — расчетная продольная сила /Пхр — коэффициент условий работы кладки по раскрытию швов кладки (принимается равным 1,5—3) / р. и — сопротивление кладки на растяжение при изгибе у и Л — расстояния от центра тяжести сечения до края сечения — момент сопротивления кладки при упругой ее работе / — момент инерции сечения. [c.246]
Уравнение движения машинного агрегата в форме уравнения кинетической энергии на конечном перемещении обычно записывают через работу приведенных к определенному звену моментов движущих сил Лд и работу сил сопротивления Ас, правую часть уравнения (изменение кинетической энергии системы) в этом случае выражают через приведенные моменты инерции звеньев в конечном У и начальном J,JO положениях [c.
 44]
44]Для оценки прочности обечайки необходимо найти момент сопротивления ее поперечного сечения. Полярный момент инерции /р тонкого кольца, каким является сечение обечайки барабана, определяют следующим образом (рис. 12.19) Ур = йР = ЯЬ [c.380]
Рнс. 22. Зависимость момента сопротивления, момента инерции и наружного диаметра цилиндрических деталей одинаковой массы от отношения dlD [c.25]
Пример [57]. Требуется определить зависимость частоты крутильных колебаний вала мешалки от вязкости жидкости, а также продолжительность времени, за которое амплитуда колебаний вала мешалки уменьшится в 10 раз после мгновенной остановки электродвигателя, если угловая скорость при равномерном вращении вала перед остановкой составляла Q. Массой вала по сравнению с массой лопастей можно пренебречь. Момент инерции массы лопастей J = 0,5 кг-м . Диаметр вала d = 0,005 м, длина вала 0,5 м. Коэффициент момента при наличии сил вязкого сопротивления движению лопастей а= 1,2 Н-м-с. Коэффициенты уравнения (160) п= 1,2/2 0,5= 1,21 = [c.107]
Коэффициенты уравнения (160) п= 1,2/2 0,5= 1,21 = [c.107]
I — допустимый средний продет трубопровода, м /исп расстояние между опорами трубопровода при гидравлическом испытании, м /пр —допустимый средний пролет трубопровода по условию провисания в пролете, м исп—коэффициент превышения рабочего давления во время испытания трубопровода, устанавливаемый нормами проектирования трубопроводов различного назначения и правилами приемки этих трубопроводов в эксплуатацию 6 — толщина стенки трубы, см W и I — момент сопротивления и момент инерции поперечного сечения трубы, см и см R2 — расчетное сопротивление материала труб и их соединений, МПа — расчетное сопротивление материала труб и их соединений при температуре гидравлического испытания, МПа а—-нагрузочный коэффициент, определяемый в зависимости от метода монтажа трубопровода [c.537]
Разность величин движущего вращающего момента и момента сил сопротивления представляет собой результирующий момент внешних сил, который в соответствии с основным уравнением динамики вращающегося тела равен произведению момента инерции тела на величину углового ускорения.
 Теперь нетрудно сделать практические выводы о вращении тела в зависимости от величины действующих моментов сил. [c.196]
Теперь нетрудно сделать практические выводы о вращении тела в зависимости от величины действующих моментов сил. [c.196]Задача 26. Двигатель внутреннего сгорания приводит во вращение компрессор. Частота вращения вала двигателя равна 1000 об/мин. Момент инерции всех вращающихся частей равен 0,2 кг-м . Внезапно кратковременно уменьшилась нагрузка на компрессор (например, упало давление воздуха). Это привело к тому, что в течение небольшого промежутка времени вал успел повернуться на 15 оборотов, а вращающий момент двигателя был больше момента сил сопротивления, действующего со стороны компрессора, на 5 Н м. Необходимо определить изменение угловой скорости вала двигателя,-которое при этом произойдет. [c.222]
Сравнивая полученные результаты, мы видим, что угловая скорость вала двигателя увеличивается значительно меньше при большой величине момента инерции вращающихся частей. Это объясняется тем, что большая часть работы избытка движущего вращающего момента над моментом сил сопротивления увеличила кинетическую энергию дополнительно установленного махового колеса. Однако чрезмерное увеличение момента инерции махового колеса нежелательно, так как его размеры и масса возрастают, а выигрыш от уменьшения изменения угловой скорости вала становится не так существенным. [c.223]
Однако чрезмерное увеличение момента инерции махового колеса нежелательно, так как его размеры и масса возрастают, а выигрыш от уменьшения изменения угловой скорости вала становится не так существенным. [c.223]
Определение момента инерции. В случае быстровращающихся винтов возможно, вследствие изменения сопротивления среды, возникновение в вале к )утильных колебаний. Для расчета последних необходимо знать м0 мент инерции винта относительно оси. Точное определение момента инерции невозможно, приближенное же лучше всего производить графо-аналитическим методом. [c.525]
После определения максимальных изгибающего и крутящего моментов вычисляют сперва моменты инерции, а затем момент сопротивления вала, используя известные формулы сопротивления материалов. [c.83]
Моменты инерции и сопротивления в сечении посредине бочки [c.468]
О — сила тяжести червяка в Н д — сила, вызванная перепадом давления в цилиндре впрыска, в Н — момент сопротивления изгибу в расчетном сечении в м Е —модуль упругости материала червяка в Н/м J — момент инерции опасного сече-р [c. 164]
164]
Пример. Опреде.чить приведенные к валу электродвигателя статический момент сопротивления и суммарный момент инерции механизмов подъемного крана (рис. 2). [c.27]
На нефтеперерабатывающих заводах из этой группы машин наиболее распространены поршневые насосы и поршневые компрессоры, для которых моменты сопротивления и моменты инерции точно определить сложно. [c.28]
Основным видом нагрузки, воспринимаемой листом, является давление снега и ветра, приводящее к изгибу листа. При заданных длине 5 и толщине к гофра можно найти такие его очертания у= (х), при которых момент сопротивления определяющий прочность при изгибе, или момент инерции /, определяющий жесткость листа, были бы наибольшими. Эта задача была решена [3] методами вариационного исчисления и было найдено, что кривой, имеющей наибольший мо- [c.330]
Высокий рельефный рисунок протектора утяжеляет шину, приводит к ее более быстрому нагреву и расслаиванию, увеличивает момент инерции колеса и его сопротивление качению. Особенно интенсивное тепловыделение наблюдается при повышенных скоростях движения, когда появляются дополнительные деформации протектора из-за действия сил инерции. [c.88]
Особенно интенсивное тепловыделение наблюдается при повышенных скоростях движения, когда появляются дополнительные деформации протектора из-за действия сил инерции. [c.88]
Кроме того, необходимо различать рабочую мощность мешалки, т. е. мощность при установившемся режиме ее работы, и пусковую мощность, т. е. ту мощность, которая необходима, чтобы мешалку пустить в ход. Так как в пусковой момент, помимо сопротивления движению, необходимо также преодолеть инерцию перемешиваемой жидко- fи и механизмов, то величина пусковой мощности превышает величину рабочей мощности в 1,3—1,4 раза для тихоходных и в 2 раза для быстроходных мешалок. [c.99]
Примечание. Принятые обозначения I — момент инерции — момент сопротивления 1 —радиус инерции . г—д — горизонтальная ось /— / — вертикальная ось. [c.39]
В этих выражениях / 1 = пО (яг—с)/8 и / г = ” И 2 — с)/8— моменты инерции площади поперечных сечений соответственно пролетной и подбандажной частей обечайки, мм — наружный диаметр подбандажной обечайки, мм 1 1 = 21×101 и = = 2/3/02 — моменты сопротивления поперечных сечений соответственно пролетной и подбандажной обечаек, мм 5зс1 = = 0,ЪО ( 1 — с) и 8×2 = 0,5 2 ( 2 — с) — статические моменты поперечного сечения соответственно пролетной и подбандажной частей обечайки, мм ф — коэффициент прочности сварного шва. [c.152]
[c.152]
Момент инерции Момен г сопротивления – рЬ [c.110]
Краткое знакомство с раб(зчим процессом и характеристиками гидропередач позволяет перейти к рассмотрению их основных свойств и возможностей, благодаря которым они получили широкое распространение. Как указывалось выше, одно из их основных достоинств — полное отсутствие жесткой связи между валами при передаче мощности. Поток жидкости между насосным и турбинным колесами эффективно гасит пульсации момента, порождаемые внезапными изменениями момента — Mg нагрузки вследствие изменения сопротивления на рабочих органах приводимой машины. При этом изменяется щ и, следовательно, скольжение 5, момент же на насосном колесе, нагружающий двигатель, меняется плавно. Причиной этого является инерционность потока, перестраивающегося с запаздыванием по отношению к изменению внешних нагрузочных параметров. Таким образом гидропередача защищает двигатель от пульсаций момента сопротивления, что значительно повышает срок его службы.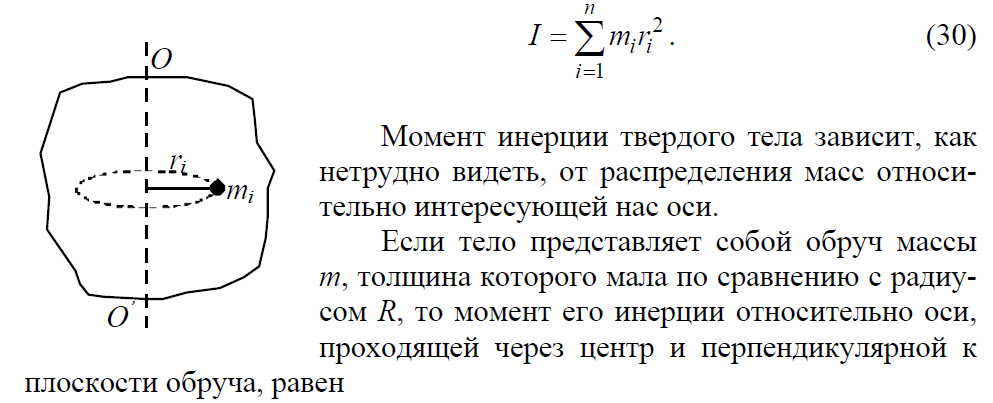 При этом благодаря малому моменту инерции турбинного колеса защищенными оказываются и детали трансмиссии между турбинным колесом и рабочими органами машины. В них ири пульсациях не так сильно увеличиваются напряжения, как при жестком соединении с двигателем. [c.304]
При этом благодаря малому моменту инерции турбинного колеса защищенными оказываются и детали трансмиссии между турбинным колесом и рабочими органами машины. В них ири пульсациях не так сильно увеличиваются напряжения, как при жестком соединении с двигателем. [c.304]
Выбор главных размеров гидрогенераторов. При выборе главных размеров гидрогенераторов исходя из заданной номинальной мощности и частоты вращения приходится дополнительно учитывать, что гидрогенератор должен обладать достаточно большим моментом инерции ротора, требуемой величиной переходного индуктивного сопротивления xa и выдерж1тать без повреждений центробежные силы, возникающие при вращении с угопной частотой Пу ,. [c.144]
Номер зета Н В 5 г п Г2 Гз е о II Р Координаты центра тяжести, мм Момент инерции, см Момент сопротивления, см Радиус ИНфЦИИ, см [c.170]
После выключения двигателя ротор вращается по инерции, поэтому движущий вращающий момент отсутствует Л4дв = 0. Момент сил сопротивления Мс и момент инерции ротора J заданы. Из уравнения (60) находим неизвестную величину углового ускорения в [c.198]
Момент сил сопротивления Мс и момент инерции ротора J заданы. Из уравнения (60) находим неизвестную величину углового ускорения в [c.198]
Для решения задачи воспользуемся выражением (69а). Найдем все величины, которые можно подсчитать по условиям задачи. Разность движущего вращающего момента и момента сил сопротивления равна УИдв — Мс = 5 Н-м. Угловое перемещение вала, соответствующее 15 его оборотам ф = 2я-15 = 94,2 рад. Момент инерции вращающихся частей У = 0,2 кг-м . Угловая скорость в начальный момент времени [c.222]
Площади, моменты инерции и моменты сопротивления сечений спицы на конце Г2 = 524 сл1 1 = 42,7-10 м = = 1,07-10 сш = 2130 сж Ш= 1,95-10 сж возледисков (сеч. 5—5) = 724 см = 183-10 сж I= 1,64-10 см -, = 5640 сж = 2,98-1 О сж . [c.337]
Определение толщины стенки по необходимому моменту сопротивления как для балки кольцевого сечения, работающей на изгиб, дает весьма преуменьшенные результаты, потому что момент инерции барабанов велик. Проверка нескольких барабанов, производившаяся с учетом веса футеровки и загрузки, давала расчетное напряжение порядка 20—30 кг см для обычных сушильных барабанов. При проверке цементных печей расчетное напряжение на изгиб нигде не превысило 200 кг см . Исходя из соображений удобства изготовления, жесткости, долговечности, возможности возникновения дополнительных температурных напряжений и нарушения правильности регулировки одной из опорных станций, а также возможности возникновения местных напряжений в непосредственной близости к бандажам, рекомендуется принимать допускаемые напряжения в пределах 50—100 кг см- для барабанов без футеровки, какими являются сушилки, кристаллизаторы и тому подобные аппараты, и до 200 кг см для барабанов с футеровкой (цементные печи, тамбуры, печи для обжига колчедана и др.). Предварительно оценить толщину барабана можно по эмпирической формуле, o,007D 0,0Ш мм, [c.549]
Проверка нескольких барабанов, производившаяся с учетом веса футеровки и загрузки, давала расчетное напряжение порядка 20—30 кг см для обычных сушильных барабанов. При проверке цементных печей расчетное напряжение на изгиб нигде не превысило 200 кг см . Исходя из соображений удобства изготовления, жесткости, долговечности, возможности возникновения дополнительных температурных напряжений и нарушения правильности регулировки одной из опорных станций, а также возможности возникновения местных напряжений в непосредственной близости к бандажам, рекомендуется принимать допускаемые напряжения в пределах 50—100 кг см- для барабанов без футеровки, какими являются сушилки, кристаллизаторы и тому подобные аппараты, и до 200 кг см для барабанов с футеровкой (цементные печи, тамбуры, печи для обжига колчедана и др.). Предварительно оценить толщину барабана можно по эмпирической формуле, o,007D 0,0Ш мм, [c.549]
Выпускают электромагнитные муфты мощностью до 1000 кВт, в том числе муфты, совмещенные с регулятором, с электромагнитным тормозом и приводным электродвигателем. Электродвигатели кузнечно-прессовых машин работают в различных условиях н режимах (длительном, повторно-кратковременном и кратковременном). Для выравнивания нагрузки, приходящейся на электродвигатель, в системе привода механических кузнечнопрессовых машин искусственно увеличивают момент инерции путем установки маховика, который обычно располагается на быстроходном валу привода. В периоды снижения нагрузки и холостых ходов электродвигатель работает на маховик, в котором запасается кинетическая энергия. В периоды пиков нагрузки скорость двигателя, который имеет смягченную механическую характеристику, несколько снижается и часть энергии покрывается за счет маховика. В качестве электродвигателей с мягкой механической характеристикой для маховиковых приводов применяют асинхронные двигатели с фазным ротором и добавочным сопротивлением в цепи ротора. Однако при постоянно включенном в роторной цепи сопротивлении увеличиваются потери энергии и использование маховика получается неполным. Поэтому широкое применение нашли маховиковые электроприводы с автоматическими жидкостными и контакторными регуляторами скольлченпя.
Электродвигатели кузнечно-прессовых машин работают в различных условиях н режимах (длительном, повторно-кратковременном и кратковременном). Для выравнивания нагрузки, приходящейся на электродвигатель, в системе привода механических кузнечнопрессовых машин искусственно увеличивают момент инерции путем установки маховика, который обычно располагается на быстроходном валу привода. В периоды снижения нагрузки и холостых ходов электродвигатель работает на маховик, в котором запасается кинетическая энергия. В периоды пиков нагрузки скорость двигателя, который имеет смягченную механическую характеристику, несколько снижается и часть энергии покрывается за счет маховика. В качестве электродвигателей с мягкой механической характеристикой для маховиковых приводов применяют асинхронные двигатели с фазным ротором и добавочным сопротивлением в цепи ротора. Однако при постоянно включенном в роторной цепи сопротивлении увеличиваются потери энергии и использование маховика получается неполным. Поэтому широкое применение нашли маховиковые электроприводы с автоматическими жидкостными и контакторными регуляторами скольлченпя. Регулятор представляет собой жидкостной реостат, сопротивление которого определяется расстоянием между электродами, Прп повышении момента нагрузки двигатель переходит с одиой реостатной характеристики на другую при помощи изменения сопротивления жидкостного реостата. В контактном регуляторе сопротивление вводится в цепь ротора двигателя ступенями с помощью контакторов. [c.32]
Регулятор представляет собой жидкостной реостат, сопротивление которого определяется расстоянием между электродами, Прп повышении момента нагрузки двигатель переходит с одиой реостатной характеристики на другую при помощи изменения сопротивления жидкостного реостата. В контактном регуляторе сопротивление вводится в цепь ротора двигателя ступенями с помощью контакторов. [c.32]
Пусковая разрядная характеристика дает возможность определить мощность батареи при пуске и уточнить напряжение, необходимое для получения скорости прокрутки. Ожидаемое значение пика тока находят обычным порядком с учетом индуктивности пусковой цепи, э. д. с. пускового йлектродви-гателя, момента инерции вращающихся частей дизеля и связанных с его валом вспомогательных машин и момента сопротивления вала троганию с места. [c.100]
Выбор силового электрооборудования и расчет параметров электропривода. Номинальный ток электродвигателя
3. Выбор силового электрооборудования и
расчет параметров электропривода
Одной из самых важных задач при проектировании является
выбор силовой аппаратуры.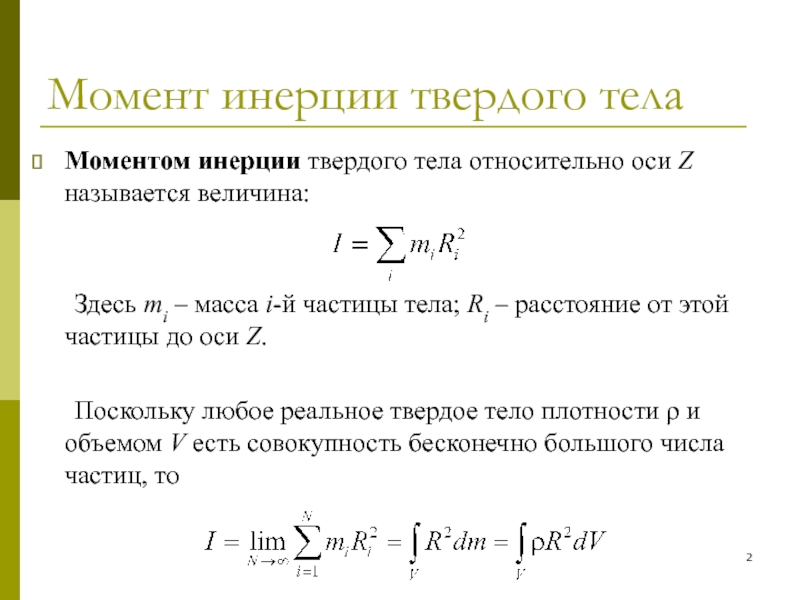 Для выбора этой аппаратуры необходимо знать такие
параметры как ток и напряжение. Поэтому произведем некоторые расчеты.
Для выбора этой аппаратуры необходимо знать такие
параметры как ток и напряжение. Поэтому произведем некоторые расчеты.
Номинальный ток электродвигателя найдем из выражения:
(3.1)
,где
– номинальный ток электродвигателя,
– номинальная мощность электродвигателя,
– номинальное напряжение питания электродвигателя, .
- КПД электродвигателя.
Номинальный ток электродвигателя 2ПФ250LГУХЛ4 согласно выражения 3.1
Выбор типоразмера электропривода производим исходя из следующих соотношений
(3.2)
,где – номинальный ток электродвигателя,
– номинальный ток электропривода,
– номинальное напряжение питания электродвигателя, .
– номинальное напряжение питания электропривода, .
Из условия 3.2 выбираем комплектный электропривод ЭПУ-1М. Номинальный ток электропривода -100 А; номинальное напряжение
-460 В.
Номинальный ток электропривода -100 А; номинальное напряжение
-460 В.
При работе электродвигатель нагревается до некоторой рабочей температуры поэтому сопротивление его якорной обмотки изменяется. При расчете параметров необходимо этот учесть этот факт. Выражение описывающее изменение сопротивления обмотки якоря и добавочных полюсов при изменении температуры имеет следующий вид:
(3.3)
,где
– сопротивление якоря электродвигателя и добавочных полюсов, приведенное к рабочей температуре,
– номинальное сопротивление якоря электродвигателя,
– номинальное сопротивление добавочных полюсов электродвигателя,
– коэффициент учитывающий температурное изменение сопротивления, для меди
-
допустимое превышение температуры обмотки якоря над температурой .В
нашем случае так
как для двигателей 2ПФ класс изоляции – В и допустимая рабочая температура
составляет . Тогда
приведенное к рабочей температуре значение сопротивление якоря и добавочных
полюсов будет:
Тогда
приведенное к рабочей температуре значение сопротивление якоря и добавочных
полюсов будет:
Далее рассчитаем суммарные моменты инерции вращающихся масс рабочей машины.
Для загруженного электропривода момент инерции будет определяться выражением:
(3.4)
,где
– суммарный приведенный к валу электродвигателя момент инерции загруженного механизма,
– момент инерции электродвигателя,
– приведенный к валу электродвигателя момент инерции шпинделя с заготовкой и вращающихся масс зубчатой и ременной передач,
Для незагруженного электропривода момент инерции будет определяться выражением:
(3.5)
,где
– суммарный приведенный к валу электродвигателя момент инерции незагруженного механизма,
– момент инерции электродвигателя,
– приведенный к валу электродвигателя момент инерции шпинделя и
вращающихся масс зубчатой и ременной передач, .
Момент инерции для загруженного электропривода, определяемый согласно выражения 3.4
Момент инерции для незагруженного электропривода, определяемый согласно выражения 3.5 будет :
Величинами характеризующими электромагнитную и электромеханическую инерционность являются электромагнитная постоянная времени и электромеханическая постоянная времени. Электромагнитная постоянная времени обусловлена наличием индуктивности в якорной цепи, и определяется выражением:
(3.6)
,где
– полная индуктивность якорной цепи ,
-полное сопротивление якорной цепи,
– электромагнитная постоянная времени якорной цепи, с.
Питание электропривода производится от трехфазной сети напряжением 220/380 В через токоограничивающие реакторы по схеме:
Полная индуктивность якорной цепи определяется выражением:
(3. 7)
7)
,где
– индуктивность якоря,
– индуктивность токоограничивающего реактора, .
Полное сопротивление якорной цепи определяется выражением:
(3.8)
,где
– сопротивление якоря и добавочных полюсов электродвигателя приведенное к рабочей температуре,
– сопротивление токоограничивающего реактора,
– индуктивное сопротивление токоограничивающего реактора, .
Индуктивное сопротивление токоограничивающего реактора определяется из выражения:
(3.9)
,где
-частота напряжения питающей сети,
Токоограничивающий реактор выбирается исходя из условий:
(3.10)
Согласно
3.10 выбираем токоограничивающий реактор РТСТ-165-0,25У3.
Номинальные данные токоограничивающего реактора заносим в таблицу 3. 1
1
Таблица 3.1
Номинальные данные токоограничивающего реактора.
|
№ |
Наименование параметра |
Значение |
Единицы измерения |
|
1 |
Номинальное напряжение |
410 |
В |
|
2 |
Номинальный ток |
165 |
А |
|
3 |
Индуктивность реактора на одну фазу |
0,25 |
мГн |
|
4 |
Сопротивление реактора на одну фазу |
13 |
мОм |
Согласно
выражения 3.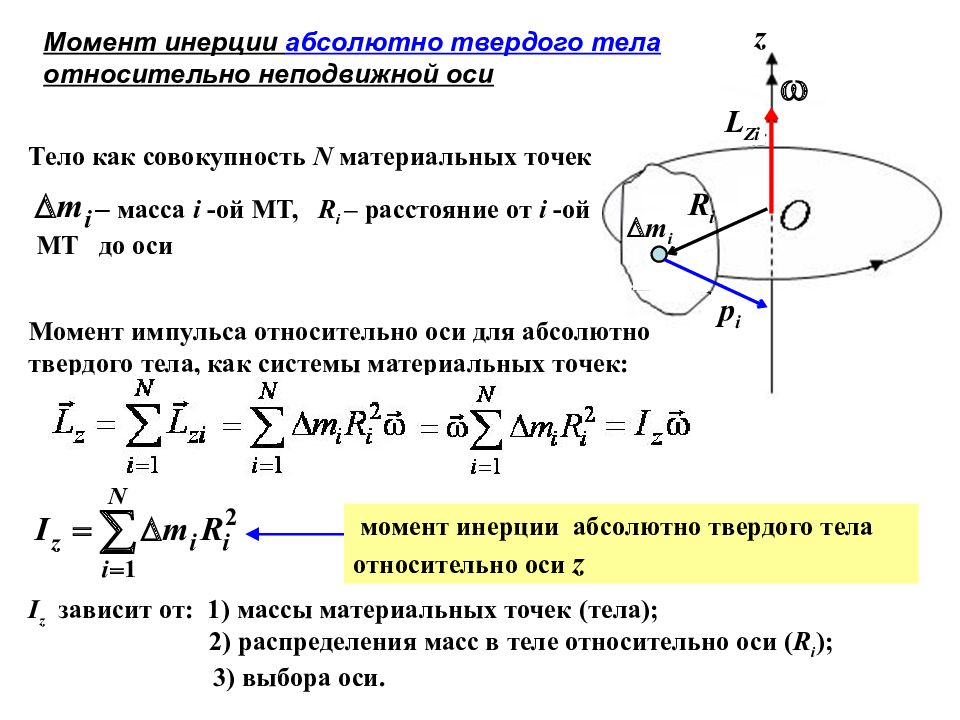 9 индуктивное сопротивление токоограничивающего реактора
9 индуктивное сопротивление токоограничивающего реактора
Тогда полная индуктивность якорной цепи согласно выражения 3.7
Согласно выражения 3.8 полное сопротивление якорной цепи определяется выражением
Тогда электромагнитная постоянная времени согласно выражения 3.6
с.
Электромеханическая постоянная времени определяется выражением:
(3.11)
,где – приведенный к валу электродвигателя расчетный момент инерции механизма,
– Полное сопротивление якорной цепи,
– конструктивный коэффициент
- поток возбуждения,
Конструктивный коэффициент и поток отдельно не несут в себе особого значения. Поэтому обычно их не рассматривают отдельно, а оперируют их произведением , что оказывается гораздо удобнее для произведения инженерных расчетов.
Для якорной цепи электродвигателя постоянного тока независимого возбуждения справедлива следующая система уравнений:
(3. 12)
12)
,где -мгновенное значение напряжения якоря электродвигателя,
-мгновенное значение тока якоря электродвигателя,
– сопротивление якоря и дополнительных полюсов электродвигателя, приведенные к рабочей температуре,
– индуктивность якоря электродвигателя,
– мгновенное значение момента
-скорость вращения электродвигателя,
Используя систему 3.12 можно получить следующее уравнение для статического режима:
(3.13)
,где – среднее значение напряжения якоря электродвигателя,
– среднее значение тока якоря электродвигателя, .
Тогда из выражения 3.13 можно получить следующее выражение:
(3.14)
Для электродвигателя 2ПФ250LГУХЛ4 в номинальном режиме согласно выражения 3.14
Тогда согласно выражения 3.11 электромеханическая постоянная времени для загруженного механизма:
с
Электромеханическая постоянная времени для незагруженного механизма:
с
Моменты инерции
Чтобы легко вычислить моменты инерции относительно
осей через $ P $ и $ C $ проще всего выбрать
система координат, выровненная с осью вращения
направление $ \ hat {a} $. Выберем координаты
$ (x, y, z) $ измеряется от центра масс $ C $ и с
$ z $ -ось $ \ hat {k} $ в направлении $ \ hat {a} $, как
показано на рисунке.
Выберем координаты
$ (x, y, z) $ измеряется от центра масс $ C $ и с
$ z $ -ось $ \ hat {k} $ в направлении $ \ hat {a} $, как
показано на рисунке.
Поскольку мы интегрируем по телу с бесконечно малым объемом $ dV $ в позиции $ (x, y, z) $ из $ C $, запишем расстояние от оси до $ C $ как $ r_c $ и расстояние от оси через $ P $ как $ r_P $, как проиллюстрировано.2. \ конец {выровнено} \] Здесь мы использовали координатное представление центра массы, чтобы понять, что координата $ x $ точки $ C $ равна $ x_C = \ frac {1} {m} \ int _ {\ mathcal {B}} \ rho x \, dV $, но поскольку наши координаты отсчитываются от $ C $, мы должны имеет $ x_C = 0 $, поэтому $ \ int _ {\ mathcal {B}} \ rho x \, dV = 0 $. Интеграл от $ \ rho y $ аналогично равен нулю.
Оценка момента инерции насоса
Момент инерции насоса – это его сопротивление изменениям угловой скорости при его вращении вокруг вала. Знание момента инерции насоса, двигателя и связанных компонентов обычно требуется для анализа переходных процессов в насосной системе. В этой статье представлены методы, с помощью которых можно оценить момент инерции насоса и двигателя.
Знание момента инерции насоса, двигателя и связанных компонентов обычно требуется для анализа переходных процессов в насосной системе. В этой статье представлены методы, с помощью которых можно оценить момент инерции насоса и двигателя.
| : | Ускорение свободного падения | |
| : | Дифференциальный напор насоса (м) | |
| : | Момент инерции | |
| : | Скорость насоса (об / мин) | |
| : | Мощность насоса при максимальной эффективности (кВт) | |
| : | Объемный расход | |
| : | Время пуска насоса (с) | |
| : | КПД насоса |
Момент инерции насоса – это его сопротивление изменениям угловой скорости, когда он вращается вокруг своей оси. вал.Инерция – это произведение вращающегося груза на квадрат его радиуса (или диаметра) вращения.
Насосы с большой массой вращения будут иметь более высокую инерцию, поэтому им потребуется больше времени для замедления вращения при потере мощности и больше времени для достижения полной скорости во время запуска. Это часто полезно для управления переходными давлениями, поскольку насос будет медленно замедляться после отключения насоса, продолжая перемещать жидкость. Это движение жидкости сводит к минимуму разделение колонны в трубопроводе, расположенном ниже по потоку, что более вероятно, если поток жидкости резко остановится на насосе.По этой причине часто устанавливают маховики для увеличения общего момента инерции насоса.
Полный момент инерции для насоса – это сумма моментов инерции для каждого компонента. При анализе отключения или останова насоса момент инерции насоса должен учитывать все вращающиеся компоненты:
- Инерция двигателя: Обычно это самая большая составляющая момента инерции насоса. Точные значения момента инерции двигателя обычно можно получить у производителя двигателя или поставщика насоса, и их следует использовать по возможности.
- Инерция рабочего колеса насоса: Это составляет массу вращения рабочего колеса и обычно составляет 10-15% инерции двигателя. Точные значения момента инерции рабочего колеса насоса обычно можно получить у поставщика, и их следует использовать там, где это возможно.
- Инерция вала: Это учитывает инерцию вращающегося вала. Он иногда включается поставщиками как часть инерции рабочего колеса насоса, однако из-за его небольшого вклада в инерцию насоса (обычно менее 5% инерции двигателя) его часто игнорируют.
- Инерция маховика: Это учитывает инерцию любых маховиков, которые могут быть установлены на валу насоса. Как указывалось ранее, маховики предназначены для увеличения инерции, и поэтому в качестве ключевого параметра конструкции это значение обычно можно получить у производителя.
- Инерция трансмиссии: Это учитывает инерцию трансмиссии насоса (при наличии). В зависимости от конструкции трансмиссии это может значительно увеличить инерцию насоса.
 Из-за изменчивости конструкции передачи это значение трудно оценить, и лучше всего получить его от поставщика.
Из-за изменчивости конструкции передачи это значение трудно оценить, и лучше всего получить его от поставщика.
Во время анализа переходных процессов часто наиболее консервативным является недооценка момента инерции насоса, особенно для жидкостей с высоким давлением пара. Насосы с более низким моментом инерции будут вращаться быстрее, более резко замедляя движение жидкости на выходе из насоса, в то время как жидкость дальше по трубопроводу продолжает течь за счет импульса. Это вызывает разделение колонны, когда между застоявшейся жидкостью на выходе из насоса и текучей средой, текущей ниже по потоку, образуется вакуум из-за импульса, который приводит к испарению текучей среды и последующим переходным давлениям при сжатии вакуума.
Хотя рекомендуется всегда получать данные об инерции от поставщиков, они не всегда доступны. В этих условиях можно оценить момент инерции насоса.
Момент инерции рабочего колеса насоса
Момент инерции рабочего колеса насоса может быть оценен с использованием соотношения методов, предложенных Wylie et al. как показано ниже.
как показано ниже.
Здесь мощность на валу насоса может быть рассчитана, как показано ниже, с более подробным описанием мощности насоса, доступной здесь.
В дополнение к инерции рабочего колеса насоса, инерция двигателя может быть недоступна от поставщика и поэтому требует оценки.
Момент инерции двигателя
Инерция двигателя насоса обычно является самой большой составляющей момента инерции насоса. Подобно рабочему колесу насоса его можно оценить с помощью соотношения, представленного Wylie et al. как показано ниже.
Инерция двигателя обычно является наиболее доступным значением инерции при рассмотрении инерции насоса, поскольку она используется при проектировании двигателя.Чтобы обеспечить максимальную точность, по возможности следует использовать значения инерции двигателя, предоставленные поставщиком.
Момент инерции маховика
Момент инерции маховика может быть вычислен с использованием общего уравнения инерции вращения твердого тела, как показано ниже.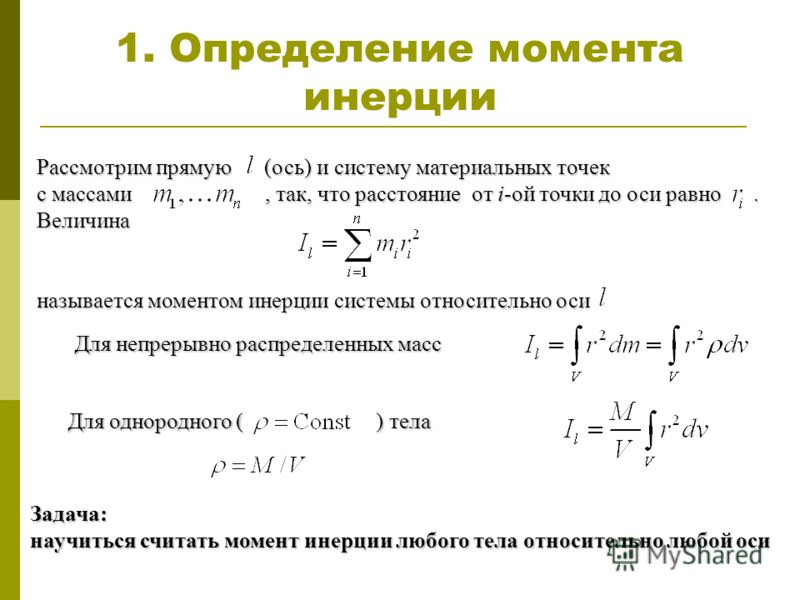
Где m – масса маховика (кг), r – радиус вращения (м), а k – инерционная постоянная, учитывающая форму маховика. Инерционная постоянная для некоторых распространенных форм маховиков указана ниже.
| Тип маховика | k | Примечания |
|---|---|---|
| Колесо со спицами, нагруженное на обод (тонкостенный, полый цилиндр) | 1 | r – внутренний диаметр цилиндра |
| Сплошной цилиндр | 0,5 | r – радиус цилиндра |
| Толстостенный цилиндр | r – внешний радиус цилиндра, t – толщина стенки, | |
| Плоский сплошной диск | 0.5 | r – радиус диска |
| Тонкостенная полая сфера | 2/3 | радиус между осью вращения и внутренней частью сферы |
| Сплошная сфера | 2/5 | r – внутренний радиус сферы |
| Стержень с осью вращения в центре стержня | 1/12 | r – длина стержня |
| Стержень с осью вращения на конце стержня | 1/3 | r – длина стержня |
| Квадратная плоскость | 1/6 | r – длина стороны квадрата |
Суммарный момент и инерция насоса, муфты и двигателя также могут быть оценивается по времени, необходимому насосу для запуска (т. е.е. перейти от 0 до 100% скорости), как показано в уравнении ниже.
е.е. перейти от 0 до 100% скорости), как показано в уравнении ниже.
Это полезно, когда время пуска насоса можно точно измерить, поскольку он более точно учитывает инерцию всех вращающихся компонентов.
Согласно американскому соглашению, при расчете момента инерции используется радиус, принятый в этой статье, то есть WK 2 , где K – радиус вращения. Однако согласно европейскому соглашению момент инерции рассчитывается на основе диаметра, то есть PD 2 .Это приводит к тому, что момент инерции, рассчитанный по европейскому соглашению, в 4 раза больше, чем рассчитанный по американскому соглашению.
Следует обратить внимание на то, чтобы момент инерции для каждого компонента насоса рассчитывался с использованием одного и того же условного обозначения. Кроме того, чтобы избежать ошибок моделирования, для определения момента инерции должны использоваться те же правила, что и в любом программном обеспечении, используемом для численного моделирования.
Теги статьи
Вопрос № f7941 | Socratic
Велосипедное колесо не является однородным объектом, вам придется рассматривать момент инерции колеса по компонентам.
Пусть # I # обозначает момент инерции. Момент инерции колеса выражается как сумма моментов инерции его компонентов.
#I_ “Колесо” = I_ “Шина” + I_ “Обод” + nI_ “Спица” + nI_ “Ниппель спицы” + I_ “Клапан” + … #
На схеме выше показано, что колесо имеет шину, обод, множество (n) спиц и ниппелей спиц, а также клапан (не показан) в качестве компонентов. Если на вашем колесе есть другие функции, показанные на схеме, добавьте их в список.
Затем найдите диаграмму момента инерции, чтобы определить формулу для каждого найденного компонента.2 #
Полный импульс – это результат всех вычислений, указанных выше. Однако, прежде чем вы сможете их рассчитать, вы должны сначала измерить M, R или L каждого компонента.
Для этого нужно разобрать колесо, извлечь его детали и измерить их массы. После измерения массы выполните измерение размера:
После измерения массы выполните измерение размера:
Для ступицы, обода и шины измерьте их диаметр или окружность, а затем преобразуйте их в соответствующие радиусы.
Для спиц просто измерьте длину (L) одной из них и посчитайте их общее количество.
Для ниппеля со спицей измерьте расстояние (R) от центра оси колеса.
Для клапана измерьте расстояние (R) от центра оси.
Для всего, чего нет в этом списке, измерьте его массу, длину или радиус и определите его формулу момента инерции в справочной таблице.
Примечание: Вскоре вы поймете, что, возможно, вы не сможете найти в справочной таблице формулу, которая точно соответствует фактической форме компонента.2 # не совсем правильно, потому что шина полая и ни в коем случае не очень тонкая. Таким образом, это уравнение является всего лишь приближением. Чтобы понять это правильно, вы можете считать, что шина состоит из трех частей (кромка плюс 2 стороны), и вычислить I для каждой части и просуммировать их.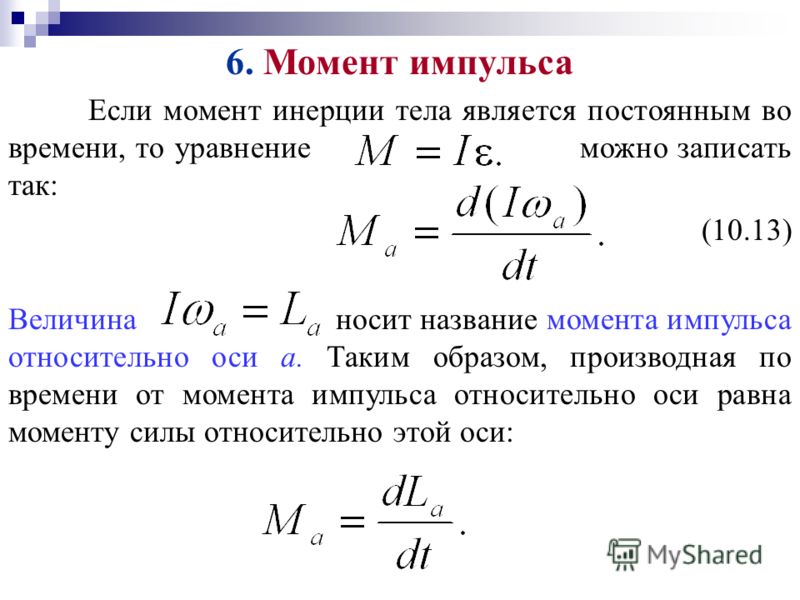
Или представьте, что он состоит из цельного куска, а внутри – полого; затем вычислите # I_ “шина” = I_ “сплошная” – I_ “полая” #. Для этого вам необходимо знать плотность резиновой шины. Мораль заключается в использовании ряда стратегий для получения результатов, максимально приближенных к истинному моменту инерции компонента.
Как рассчитать массовый момент инерции при выборе ограничителей крутящего момента
РАСЧЕТ МОМЕНТА ИНЕРЦИИ
Как производителя предохранительных муфт и ограничителей крутящего момента нас часто просят оказать некоторую помощь в вычислении момента инерции различных нагрузок, чтобы помочь в выборе соответствующих настроек крутящего момента расцепления. Как только значения инерции ведущего и ведомого известны, значения ускорения и замедления используются для оценки диапазонов регулировки крутящего момента предохранительной муфты.
Момент инерции можно описать как механическое свойство массы твердого объекта, которое количественно определяет крутящий момент, необходимый для изменения угловой скорости объекта вокруг оси.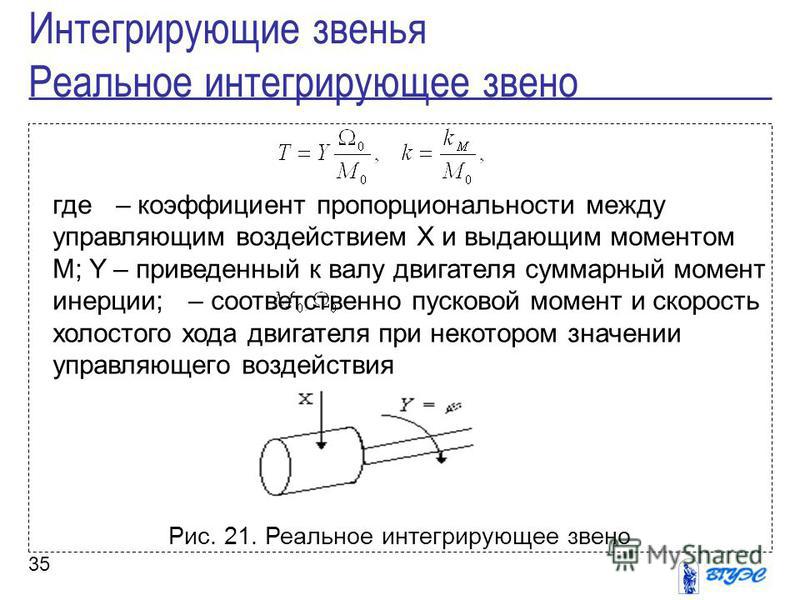 Эта инерция также известна как момент инерции массы, первый момент или инерция вращения. Этот момент можно использовать для расчета энергии, необходимой для вращения объекта, что особенно полезно в механических приводных линиях с двигателями и двигателями. При выборе ограничителя крутящего момента или предохранительной муфты важно, чтобы значение крутящего момента отключения было установлено на значение выше, чем требуется для ускорения нагрузки до скорости.Также полезно знать уровни крутящего момента, возникающие в результате резкого замедления вращающейся массы, именно здесь вступают в действие ограничители крутящего момента и предохранительные муфты, защищающие компоненты трансмиссии от чрезмерных крутящих моментов, возникающих в результате непреднамеренной блокировки, приводящей к слишком быстрой остановке машины. Момент инерции, часто обозначаемый как ( I ), представляет собой единицу массы, умноженную на квадрат площади ( M * A 2 ). В случае вращающегося вала диаметром два дюйма и массой в сто фунтов момент инерции можно рассчитать по приведенному ниже примеру.
Эта инерция также известна как момент инерции массы, первый момент или инерция вращения. Этот момент можно использовать для расчета энергии, необходимой для вращения объекта, что особенно полезно в механических приводных линиях с двигателями и двигателями. При выборе ограничителя крутящего момента или предохранительной муфты важно, чтобы значение крутящего момента отключения было установлено на значение выше, чем требуется для ускорения нагрузки до скорости.Также полезно знать уровни крутящего момента, возникающие в результате резкого замедления вращающейся массы, именно здесь вступают в действие ограничители крутящего момента и предохранительные муфты, защищающие компоненты трансмиссии от чрезмерных крутящих моментов, возникающих в результате непреднамеренной блокировки, приводящей к слишком быстрой остановке машины. Момент инерции, часто обозначаемый как ( I ), представляет собой единицу массы, умноженную на квадрат площади ( M * A 2 ). В случае вращающегося вала диаметром два дюйма и массой в сто фунтов момент инерции можно рассчитать по приведенному ниже примеру.
Расчет момента инерции для вала диаметром 0,1 метра и массой 1000 кг выполняется точно таким же образом.
Определение момента инерции трубы или полого вала очень похоже. В следующем примере мы найдем значение для трубы с внешним диаметром 0,5 метра и внутренним диаметром 0,3 метра. Масса трубки 500 кг.
Также может быть полезно вычисление момента квадратного или прямоугольного вала или формы.В этом примере будет найден момент квадратного вала размером один дюйм на один дюйм с массой 1000 фунтов.
Приведенные выше примеры удобны для расчета размеров компонентов механического привода, а не только предохранительных муфт. Отношения инерции вращающихся валов и роторов двигателей имеют решающее значение для правильной работы многих приводов. Все эти расчеты производятся относительно оси обычного вращения вала и не могут использоваться для другой оси. Важно отметить, что это момент массы, и расчет дает нам свойство массы на расстоянии от оси вращения. Как и во всех вращающихся объектах, момент экспоненциально увеличивается по мере удаления массы от оси вращения. Эти основные факты физики имеют решающее значение для проектирования машин и являются основным руководящим принципом на протяжении веков машиностроения.
Как и во всех вращающихся объектах, момент экспоненциально увеличивается по мере удаления массы от оси вращения. Эти основные факты физики имеют решающее значение для проектирования машин и являются основным руководящим принципом на протяжении веков машиностроения.
Инерция вращения и момент инерции
Представьте, что отец толкает карусель на детской площадке на рисунке ниже. Он прилагает силу 250 Н к краю карусели массой 50,0 кг, имеющей 1.Радиус 50 м. Вычислите угловое ускорение, возникающее (а), когда никого нет на карусели, и (б), когда ребенок весом 18,0 кг сидит на расстоянии 1,25 м от центра. Считайте саму карусель однородным диском с незначительным тормозящим трением.
Отец толкает карусель на детской площадке за край и перпендикулярно ее радиусу, чтобы добиться максимального крутящего момента.
Стратегия
Угловое ускорение задается непосредственно выражением \ (\ alpha = \ cfrac {\ text {net τ}} {I} \):
\ (\ alpha = \ cfrac {\ tau} { Я}. {2} \ text {,} \)
{2} \ text {,} \)
где \ (M = \ text {50.{2}} \ text {.} \)
Обсуждение
Угловое ускорение меньше, когда ребенок находится на карусели, чем когда карусель пуста, как и ожидалось. Обнаруженные угловые ускорения довольно велики, отчасти из-за того, что трение считалось незначительным. Если, например, отец продолжал толкать перпендикулярно в течение 2,00 с, он дал бы карусели угловую скорость 13,3 рад / с, когда она пуста, и только 8,89 рад / с, когда на ней сидит ребенок.В оборотах в секунду эти угловые скорости составляют 2,12 об / с и 1,41 об / с соответственно. В первом случае отец разгонялся до 50 км / ч. Летние Олимпийские игры, вот он! Подтверждение этих чисел оставлено читателю в качестве упражнения.
Определение момента инерции диска
В физике вращательный эквивалент массы – это то, что называется моментом инерции . Определение момента инерции элемента объема, имеющего массу, дается формулой
, где – перпендикулярное расстояние от оси вращения до элемента объема. Чтобы найти полный момент инерции объекта, нам нужно просуммировать момент инерции всех элементов объема в объекте по всем значениям расстояния от оси вращения. Обычно мы рассматриваем момент инерции относительно вертикали (оси z) и обычно обозначаем его как. Мы можем написать
Чтобы найти полный момент инерции объекта, нам нужно просуммировать момент инерции всех элементов объема в объекте по всем значениям расстояния от оси вращения. Обычно мы рассматриваем момент инерции относительно вертикали (оси z) и обычно обозначаем его как. Мы можем написать
Момент инерции относительно двух других кардинальных осей обозначен и, но мы можем рассматривать момент инерции относительно любой удобной оси.
Определение момента инерции диска
В этом блоге я определю момент инерции диска.В следующих блогах я буду выводить другие моменты инерции, например для кольца, твердой сферы, сферической оболочки и полой сферы с очень тонкой оболочкой.
Для наших целей диск представляет собой сплошную окружность с малой толщиной (малой по сравнению с радиусом диска). Если его толщина сопоставима с его радиусом, он становится цилиндром, о чем мы поговорим в следующем блоге. Итак, наш диск выглядит примерно так.
Диск небольшой толщины с радиусом
Чтобы вычислить момент инерции этого диска относительно оси z, суммируем момент инерции элемента объема от центра (где) до внешнего радиуса.
Элемент массы связан с элементом объема посредством уравнения
(где – плотность элемента объема). В этом примере мы будем предполагать, что плотность диска однородна; но в принципе, если бы мы знали его зависимость от, это не было бы проблемой.
Элемент объема можно рассчитать, рассматривая кольцо радиуса с шириной и толщиной. Объем этого кольца равен этой окружности кольца, умноженной на его ширину, умноженную на его толщину.
, поэтому мы можем записать
и, следовательно, мы можем записать уравнение (1) как
Интегрируя между радиусом и, мы получаем
Если теперь мы определим общую массу диска как, где
и общий объем диска. Общий объем диска – это просто его площадь, умноженная на его толщину,
, поэтому общая масса равна
. Используя это, мы можем переписать уравнение (2) как
Каковы моменты инерции относительно осей x и y?
Чтобы найти момент инерции относительно оси x или оси y, мы используем теорему о перпендикулярной оси . Это означает, что для объектов, которые лежат в плоскости, момент инерции относительно оси, параллельной этой плоскости, задается формулой
Это означает, что для объектов, которые лежат в плоскости, момент инерции относительно оси, параллельной этой плоскости, задается формулой
, где и – два момента инерции в плоскости и перпендикулярно друг другу.
Из симметрии диска видно, что момент инерции относительно осей x и y будет одинаковым, поэтому. Следовательно, мы можем написать
Маховики
Маховики используются для хранения энергии вращения. Это полезно, когда источник энергии не является непрерывным, поскольку они могут помочь обеспечить непрерывный источник энергии.Они используются во многих типах двигателей, в том числе в современных автомобилях.
Именно благодаря моменту инерции диска он может накапливать энергию вращения таким образом. Как и в случае с массой в линейном случае, для изменения скорости вращения (угловой скорости) объекта требуется сила. Чем больше момент инерции, тем больше сила, необходимая для изменения его угловой скорости. Как видно из уравнения для момента инерции диска, для двух маховиков одинаковой массы более тонкий и больший будет накапливать больше энергии, чем более толстый и меньший, потому что его момент инерции увеличивается пропорционально квадрату радиуса диск.