
Момент силы через момент инерции — Сборка-Доработка
В динамике поступательного движения материальной точки кроме кинематических характеристик вводились понятия силы и массы. При изучении динамики вращательного движения вводятся физические величины — момент сил и момент инерции, физический смысл которых раскроем ниже.
Пусть некоторое тело под действием силы
, приложенной в точке А, приходит во вращение вокруг оси ОО’ (рисунок 5.1).
Рисунок 5.1 – К выводу понятия момента силы
Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р, опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы. Произведение силы на плечо определяет модуль момента силы относительно точки О:
(5.1)
Момент силы есть вектор, определяемый векторным произведением радиуса-вектора точки приложения силы и вектора силы:
(5. 2)
2)
Единица момента силы — ньютон-метр (Н . м). Направление вектора момента силы находиться с помощью правила правого винта.
Мерой инертности тел при поступательном движении является масса. Инертность тел при вращательном движении зависит не только от массы, но и от ее распределения в пространстве относительно оси вращения. Мерой инертности при вращательном движении служит величина, называемая моментом инерции тела относительно оси вращения.
Момент инерции материальной точки относительно оси вращения — произведение массы этой точки на квадрат расстояния от оси:
(5.3)
Момент инерции тела относительно оси вращения — сумма моментов инерции материальных точек, из которых состоит это тело:
(5.4)
В общем случае, если тело сплошное и представляет собой совокупность точек с малыми массами dm, момент инерции определяется интегрированием:
, (5.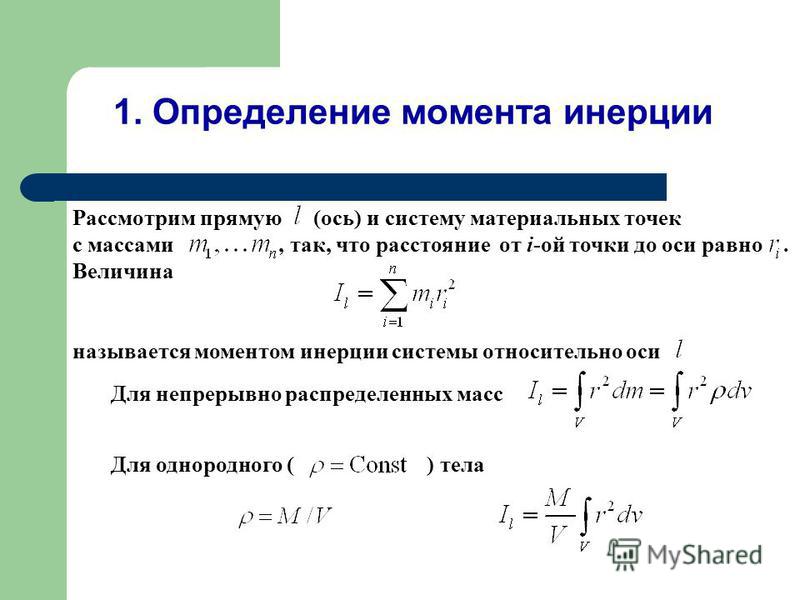 5)
5)
где r — расстояние от оси вращения до элемента массой dm.
Если тело однородно и его плотность ρ = m/V, то момент инерции тела
(5.6)
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Наиболее просто определяется момент инерции тел, имеющих правильную геометрическую форму и равномерное распределение массы по объему.
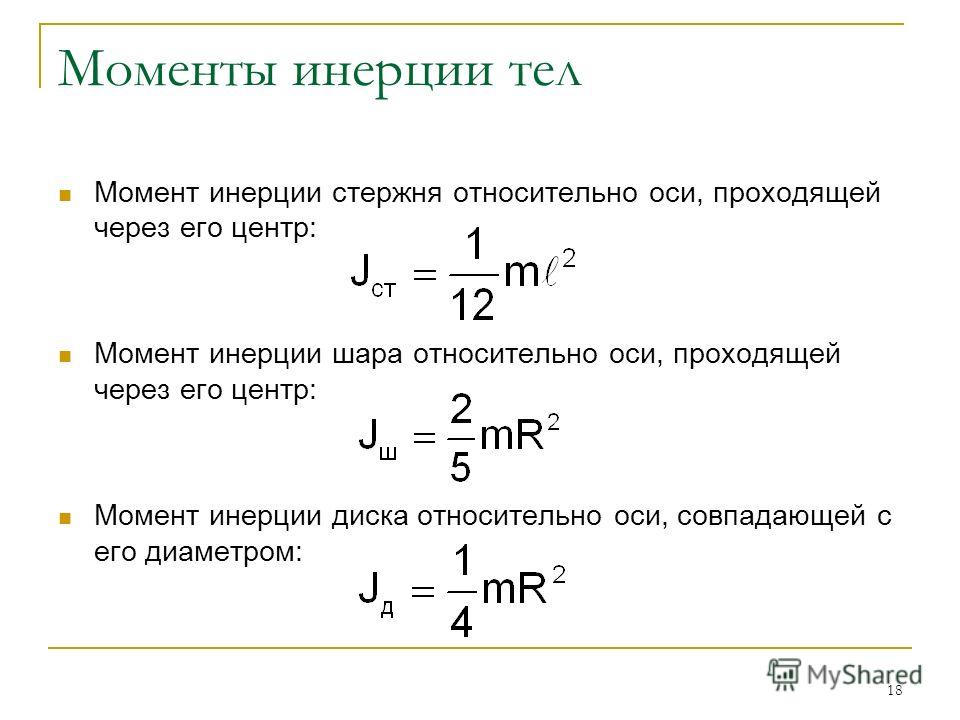
Момент инерции однородного стержня относительно оси, проходящей через центр инерции и перпендикулярной стержню,
(5.7)
Момент инерции однородного цилиндра относительно оси, перпендикулярной его основанию и проходящей через центр инерции,
Момент инерции тонкостенного цилиндра или обруча относительно оси, перпендикулярной плоскости его основания и проходящей через его центр,
(5. 9)
9)
Момент инерции шара относительно диаметра
(5.10)
Определим момент инерции диска относительно оси, проходящей через центр инерции и перпендикулярной плоскости вращения. Пусть масса диска – m, а его радиус – R.
Площадь кольца (рисунок 5.2), заключенного между r и
Рисунок 5.2 – К выводу момента инерции диска
Площадь диска
. При постоянной толщине кольца,
откуда
или .
Тогда момент инерции диска,
(5.11)
Для наглядности на рисунке 5.3 изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
Рисунок 5.3 – Моменты инерции IC некоторых однородных твердых тел.
Теорема Штейнера
Приведенные выше формулы для моментов инерции тел даны при условии, что ось вращения проходит через центр инерции.
(5.12)
где m — масса тела, d — расстояние от центра масс до выбранной оси вращения. Единица момента инерции — килограмм-метр в квадрате (кг . м 2 ).
Так, момент инерции однородного стержня длиной
(5.13)
Дата добавления: 2017-01-08 ; просмотров: 24860 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Вращательное движение — вид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружности и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения может быть подвижной и неподвижной.
Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружности и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения может быть подвижной и неподвижной.
Аналогия между параметрами кинематики и динамики:
| S | ϕR | путь |
| V | ω | Скорость — угловая скорость |
| a | β | Ускорение – угловое ускорение |
| F | M=I*β | Сила – момент силы |
| m | I=km | Масса – момент инерции |
| P=mV | L=p*l | Импульс – момент импульса |
| A=F*S | A=M*ϕ | Работа |
| W= | W= | Энергия |
Момент инерции
где:
— масса i-й точки, — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси a подобно тому, как масса тела является мерой его инертности в поступательном движении.
Теорема Штейнера
Момент инерции твёрдого тела вокруг произвольной оси равен моменту инерции тела вокруг оси, проходящей через центр массы данного тела параллельно данной оси, плюс произведение массы тела на квадрат расстояния между осями.
Момент силы. Основной закон динамики вращательного движения.
Момент силы— векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
В физике момент силы можно понимать как «вращающая сила». В системе СИ единицами измерения для момента силы является ньютон-метр.
Основным законом динамики вращательного движения является связь момента силы М с моментом инерции
и угловым ускорением β:
Работа при вращательном движении тела
— момент силы относительно оси вращения z.
— векторное произведение.
Кинетическая энергия при вращательном движении
— момент инерции твердого тела, относительно оси z.
Моментом инерции материальной точки
называется величина:
Величина I зависит от положения оси вращения и от распределения масс в теле.
Момент импульса. Закон сохранения момента импульса.
Момент импульса характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Замечание: момент импульса относительно точки — это псевдовектор, а момент импульса относительно оси — скалярная величина.
Следует учесть, что вращение здесь понимается в широком смысле, не только как регулярное вращение вокруг оси.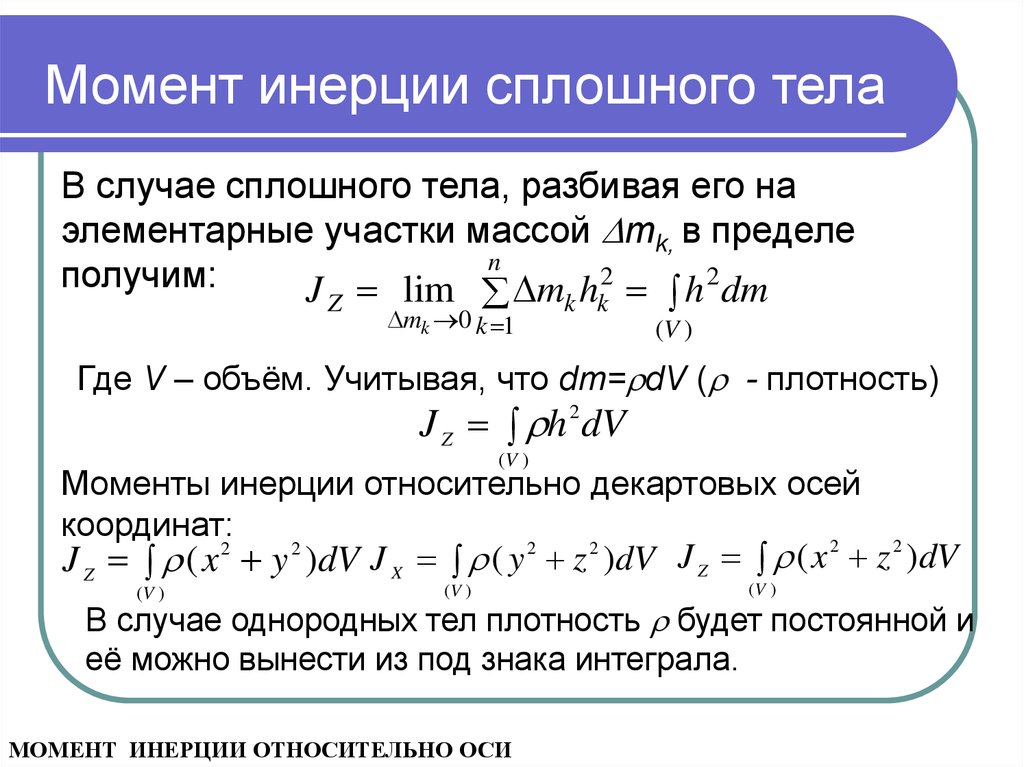
Момент импульса замкнутой системы сохраняется.
Момент импульса
частицы относительно некоторого начала отсчёта определяется векторным произведением ее радиус-вектора и импульса:
где
— радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчета начала отсчёта, — импульс частицы.
В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
Моментом импульса вращающегося тела называют физическую величину, равную произведению момента инерции тела I на угловую скорость ω его вращения. Момент импульса обозначается буквой L:
Поскольку
уравнение вращательного движения можно представить в виде:
Окончательно будем иметь:
Это уравнение, полученное здесь для случая, когда I = const, справедливо и в общем случае, когда момент инерции тела изменяется в процессе движения.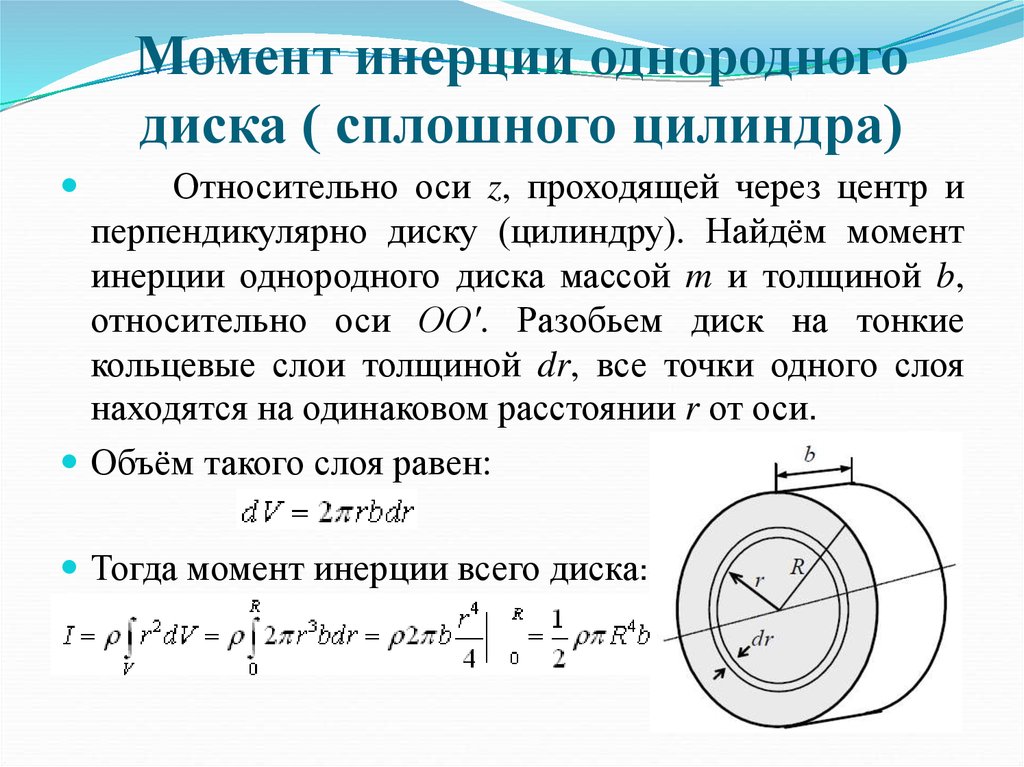
Если суммарный момент M внешних сил, действующих на тело, равен нулю, то момент импульса L = Iω относительно данной оси сохраняется:
ΔL = 0, если M = 0.
Это и есть закон сохранения момента импульса. Иллюстрацией этого закона может служить неупругое вращательное столкновение двух дисков, насажанных на общую ось
Неупругое вращательное столкновение двух дисков.
Закон сохранения момента импульса:
= ( + )ω
Дата добавления: 2018-08-06 ; просмотров: 668 ; ЗАКАЗАТЬ РАБОТУ
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению радиус-вектора (проведённого от оси вращения к точке приложения силы — по определению), на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело. В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр.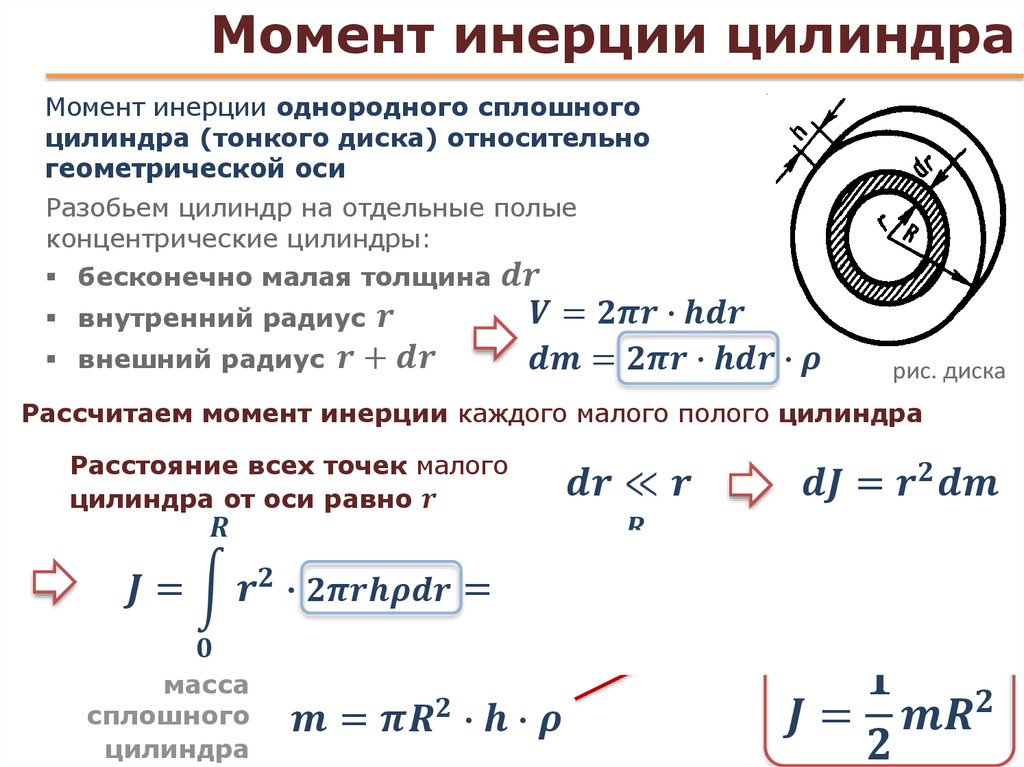 Момент силы иногда называют моментом пары сил, это понятие возникло в трудахАрхимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метров от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров до оси вращения. Более точно, момент силы частицы определяется как векторное произведение:
Момент силы иногда называют моментом пары сил, это понятие возникло в трудахАрхимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метров от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров до оси вращения. Более точно, момент силы частицы определяется как векторное произведение:
где
— сила, действующая на частицу, а—радиус-вектор частицы.
Моме́нт и́мпульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количествовращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Замечание: момент импульса относительно точки — это псевдовектор, а момент импульса относительно оси — псевдоскаляр.
Момент импульса замкнутой системы сохраняется.
Момент инерции — скалярная (в общем случае — тензорная) физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения в Международной системе единиц (СИ): кг·м².
Обозначение: I или JМоментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
,
11. Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — один из фундаментальных законов сохранения. Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел и остается постоянной, пока на систему не воздействуют внешние силы. В соответствии с этиммомент импульса замкнутой системы в любой системе координат не изменяется со временем.
Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел и остается постоянной, пока на систему не воздействуют внешние силы. В соответствии с этиммомент импульса замкнутой системы в любой системе координат не изменяется со временем.
Закон сохранения момента импульса есть проявление изотропности пространства относительно поворота.
В упрощённом виде:
, если система находится в равновесии.
Специальная теория относительности (СТО; также частная теория относительности) — теория, описывающая движение, законымеханики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света. В рамках специальной теории относительности классическая механика Ньютона является приближением низких скоростей. Обобщение СТО для гравитационных полей называется общей теорией относительности.
Момент силы и момент инерции
В динамике поступательного движения материальной точки кроме кинематических характеристик вводились понятия силы и массы. При изучении динамики вращательного движения вводятся физические величины — момент сил и момент инерции, физический смысл которых раскроем ниже.
Пусть некоторое тело под действием силы , приложенной в точке А, приходит во вращение вокруг оси ОО’ (рисунок 5.1).
Рисунок 5.1 – К выводу понятия момента силы
Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р, опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы. Произведение силы на плечо определяет модуль момента силы относительно точки О:
(5.1)
Момент силы есть вектор, определяемый векторным произведением радиуса-вектора точки приложения силы и вектора силы:
(5. 2)
2)
Единица момента силы — ньютон-метр (Н.м). Направление вектора момента силы находиться с помощью правила правого винта.
Мерой инертности тел при поступательном движении является масса. Инертность тел при вращательном движении зависит не только от массы, но и от ее распределения в пространстве относительно оси вращения. Мерой инертности при вращательном движении служит величина, называемая моментом инерции тела относительно оси вращения.
Момент инерции материальной точки относительно оси вращения — произведение массы этой точки на квадрат расстояния от оси:
(5.3)
Момент инерции тела относительно оси вращения — сумма моментов инерции материальных точек, из которых состоит это тело:
(5.4)
В общем случае, если тело сплошное и представляет собой совокупность точек с малыми массами dm, момент инерции определяется интегрированием:
, (5. 5)
5)
где r — расстояние от оси вращения до элемента массой dm.
Если тело однородно и его плотность ρ = m/V, то момент инерции тела
(5.6)
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Наиболее просто определяется момент инерции тел, имеющих правильную геометрическую форму и равномерное распределение массы по объему.
Момент инерции однородного стержня относительно оси, проходящей через центр инерции и перпендикулярной стержню,
(5.7)
Момент инерции однородного цилиндра относительно оси, перпендикулярной его основанию и проходящей через центр инерции,
(5.8)
Момент инерции тонкостенного цилиндра или обруча относительно оси, перпендикулярной плоскости его основания и проходящей через его центр,
(5. 9)
9)
Момент инерции шара относительно диаметра
(5.10)
Определим момент инерции диска относительно оси, проходящей через центр инерции и перпендикулярной плоскости вращения. Пусть масса диска – m, а его радиус – R.
Площадь кольца (рисунок 5.2), заключенного между r и , равна .
Рисунок 5.2 – К выводу момента инерции диска
Площадь диска . При постоянной толщине кольца,
откуда или .
Тогда момент инерции диска,
(5.11)
Для наглядности на рисунке 5.3 изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
Рисунок 5.3 – Моменты инерции IC некоторых однородных твердых тел.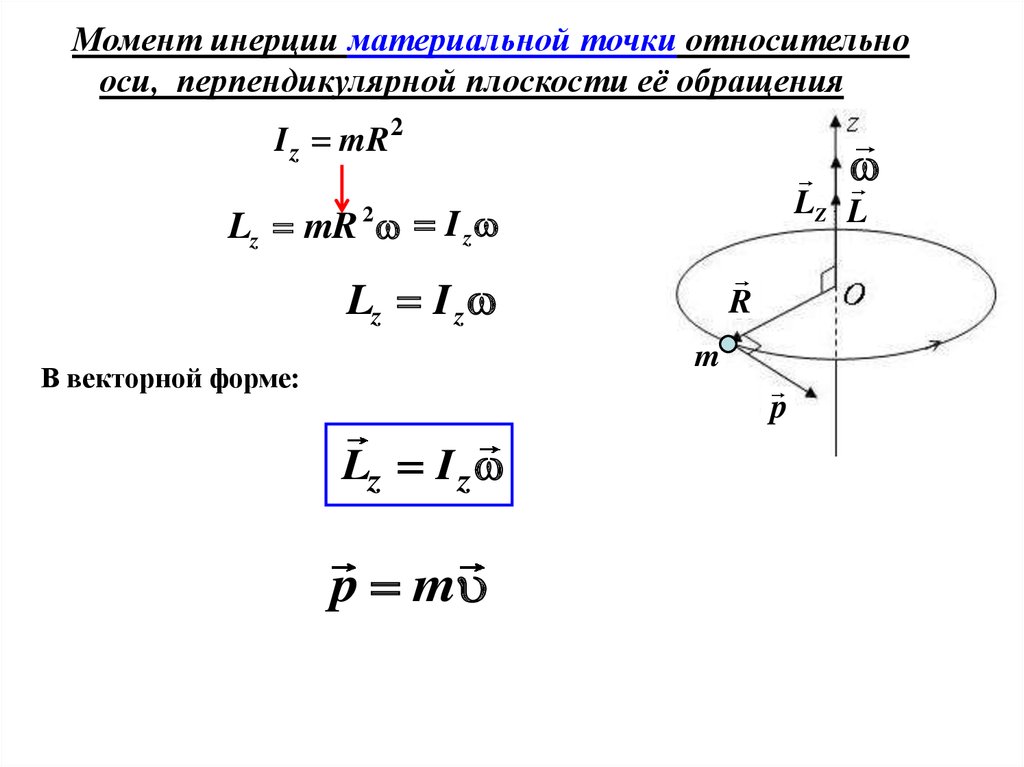
Теорема Штейнера
Приведенные выше формулы для моментов инерции тел даны при условии, что ось вращения проходит через центр инерции. Чтобы определить моменты инерции тела относительно произвольной оси, следует воспользоваться теоремой Штейнера: момент инерции тела относительно произвольной оси вращения равен сумме момента инерции J0 относительно оси, параллельной данной и проходящей через центр инерции тела, и величины md2:
(5.12)
где m — масса тела, d — расстояние от центра масс до выбранной оси вращения. Единица момента инерции — килограмм-метр в квадрате (кг . м2).
Так, момент инерции однородного стержня длиной l относительно оси, проходящей через его конец, по теореме Штейнера равен
(5. 13)
13)
Дата добавления: 2017-01-08; просмотров: 30786; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
определение, формулы, примеры решения задач. Расчет винтовых цилиндрических пружин
Базовый курс лекций по сопромату, теория, практика, задачи.
1. Геометрические характеристики сечений.
1.3. Моменты инерции простых сечений.
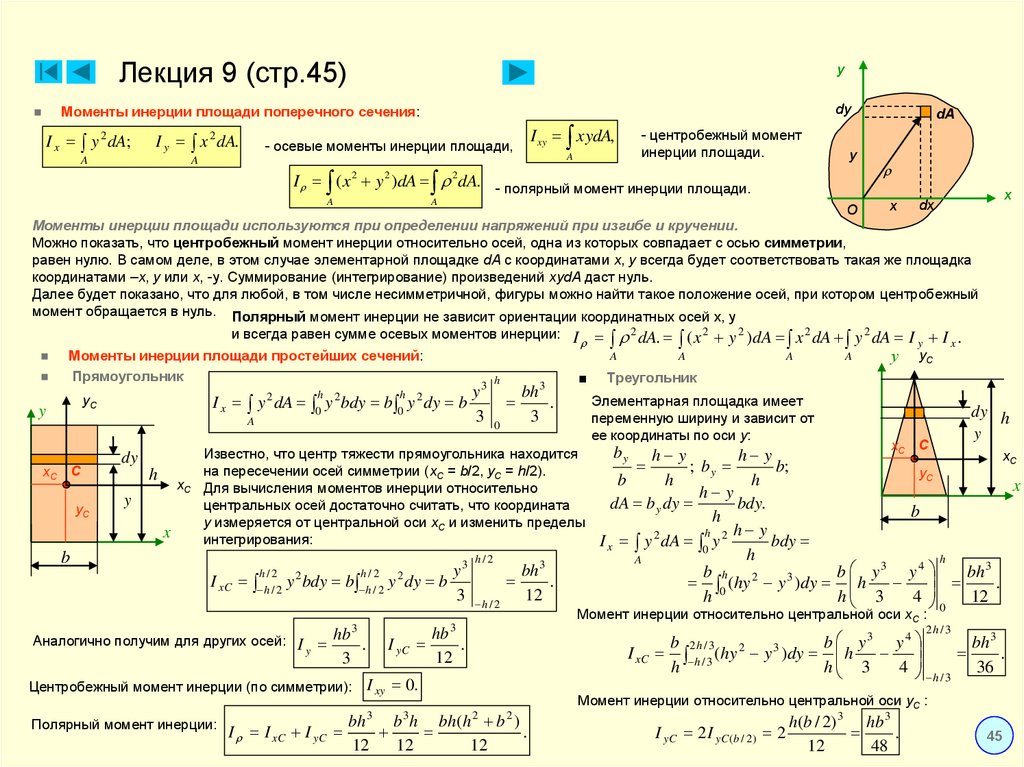
1. Прямоугольник (рис. 1.5,а). Вычислим момент инерции сечения относительно оси Х0 , проходящей через центр тяжести параллельно основанию.
За dA примем площадь бесконечно тонкого слоя dA = bdy.
Тогда
Итак,
(1.11)
Аналогично, получим
(1.12)
2. Круг (рис. 1.5,б). Сначала определим полярный момент инерции относительно центра круга
За dA принимаем площадь бесконечно тонкого кольца толщиной dp
тогда
Следовательно,
(1.13)
Теперь легко найдем Ixo
. Действительно, для круга согласно формуле (1. 9.), имеем Iр
= 2Iхо
= 2Iуо
, откуда
9.), имеем Iр
= 2Iхо
= 2Iуо
, откуда
(1.14)
2. Кольцо (рис. 1.5,в). Осевой момент инерции в этом случае равен разности моментов инерции внешнего и внутреннего кругов
(1.15)
где c = d/D.
Аналогично полярный момент инерции
(1.16)
2. Треугольник (рис. 1.5,г). Определим момент инерции относительно оси x1
, параллельной основанию и проходящей через вершину треугольника
За dA примем площадь бесконечно тонкой трапеции KBDE, площадь которой можно считать равной площади прямоугольника:
DA = by dy,
Где by – длина прямоугольника.
ОПРЕДЕЛЕНИЕ
Осевым (или экваториальным) моментом инерции сечения относительно оси называется величина, которую определяют как:
Выражение (1) обозначает, для вычисления осевого момента инерции берется по всей площади S сумма произведений бесконечно малых площадок () умноженных на квадраты расстояний от них до оси вращения:
Сумма осевых моментов инерции сечения относительно взаимно перпендикулярных осей (например, относительно осей X и Y в декартовой системе координат) дают полярный момент инерции () относительно точки пересечения этих осей:
ОПРЕДЕЛЕНИЕ
Полярным моментом инерции называют момент инерции сечением по отношению к некоторой точке.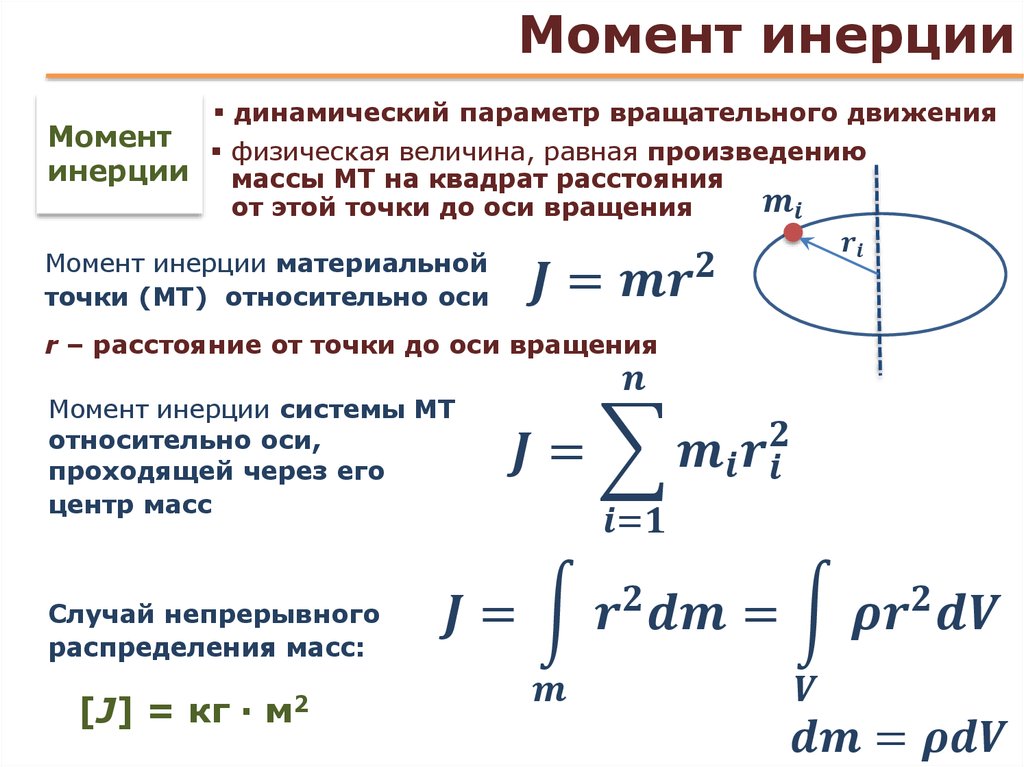
Осевые моменты инерции всегда больше нуля, так как в их определениях (1) под знаком интеграла стоят величина площади элементарной площадки (), всегда положительная и квадрат расстояния от этой площадки до оси.
Если мы имеем дело с сечением сложной формы, то часто при расчетах используют то, что осевой момент инерции сложного сечения по отношению к оси равен сумме осевых моментов инерции частей этого сечения относительно той же оси. Однако следует помнить, что нельзя суммировать моменты инерции, которые найдены относительно разных осей и точек.
Осевой момент инерции относительно оси проходящей через центр тяжести сечения имеет наименьшее значение из всех моментов относительно параллельных с ней осей. Момент инерции относительно любой оси () при условии ее параллельности с осью, проходящей через центр тяжести равен:
где – момент инерции сечения относительно оси проходящей через центр тяжести сечения; – площадь сечения; – расстояние между осями.
Примеры решения задач
ПРИМЕР 1
| Задание | Чему равен осевой момент инерции равнобедренного треугольного сечения относительно оси Z, проходящей через центр тяжести () треугольника, параллельно его основанию? Высота треугольника равна .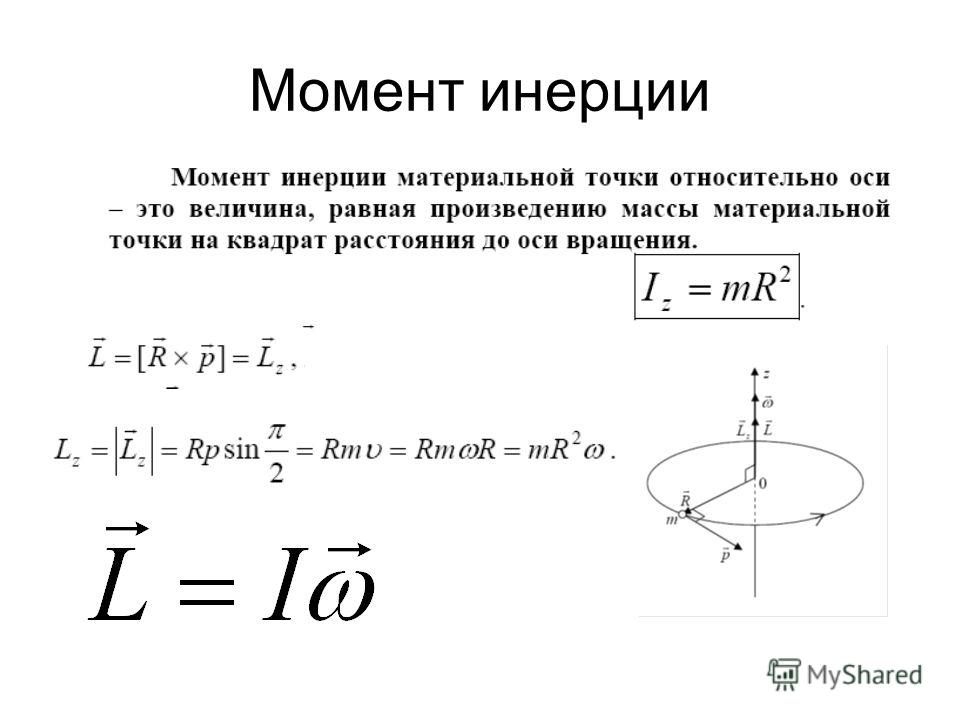 |
| Решение | Выделим на треугольном сечении прямоугольную элементарную площадку (см. рис.1). Она находится на расстоянии от оси вращения, длина одной ее стороны , другая сторона . Из рис.1 следует, что: Площадь выделенного прямоугольника с учетом (1.1) равна: Для нахождения осевого момента инерции используем его определение в виде: |
| Ответ |
ПРИМЕР 2
| Задание | Найдите осевые моменты инерции относительно перпендикулярных осей X и Y (рис.2) сечения в виде круга диаметр которого равен d. |
| Решение | Для решения задачи удобнее начать с нахождения полярного момента относительно центра сечения (). Все сечение разобьем на бесконечно тонкие кольца толщиной , радиус которых обозначим . Тогда элементарную площадь найдем как: |
Рассматривая в предыдущих разделах простейшие виды деформаций – осевое растяжение и сжатие, смятие, скалывание – мы выяснили, что их сопротивление действующей силе пропорционально только размерам площади поперечного сечения элемента, на который действует сила. Так, при одинаковой площади сечения, одном и том же материале и одинаковой силе, действующей на каждый из стержней, изображенный на рис. 9.14, в них возникнут равные напряжения.
Так, при одинаковой площади сечения, одном и том же материале и одинаковой силе, действующей на каждый из стержней, изображенный на рис. 9.14, в них возникнут равные напряжения.
Переходя далее к изучению других более сложных видов деформаций (кручение, изгиб, внецентренное сжатие и др.) мы увидим, что в этих случаях сопротивление элемента конструкции
внешним силам зависит не только от площади его поперечного сечения, но и от распределения этой площади в плоскости сечения, т. е. от формы сечения.
Из обыденного опыта ясно, что согнуть стержень 4 в вертикальном направлении труднее, чем стержень 5, а стержень 6 имеет еще большую жесткость, хотя площади сечений всех этих стержней одинаковые (рис. 9.14).
Параметрами,
характеризующими геометрические свойства различных плоских фигур,
кроме площади, являются: статические моменты, моменты инерции, моменты
сопротивления и радиусы инерции.
Статический момент
площади . Представим брус с произвольной формой поперечного сечения
площадью F , в плоскости которого проведена ось х (рис. 9.15). Выделим элемент площади dF , расположенный на расстоянии у от оси х .. Статическим моментом элементарной площадки
, относительно
оси х называют произведение этой площадки на ее расстояние до оси:
9.15). Выделим элемент площади dF , расположенный на расстоянии у от оси х .. Статическим моментом элементарной площадки
, относительно
оси х называют произведение этой площадки на ее расстояние до оси:
Статический момент всей площади F относительно оси х равен сумме статических моментов всех элементарных площадок, которые
могут быть выделены на рассматриваемой площади:
Из теоретической механики известно, что координаты центра тяжести
площади фигуры определяют по формулам:
Поэтому
Следовательно, статический момент фигуры площадью F относительно
какой-нибудь оси равен произведению площади на расстояние центра
тяжести фигуры до этой оси. Размерность статического момента – единица
длины в кубе (
, ).
Оси, проходящие через
центр тяжести сечения, называют центральными.Если фигура имеет ось
симметрии, то последняя всегда проходит через центр тяжести фигуры,
т.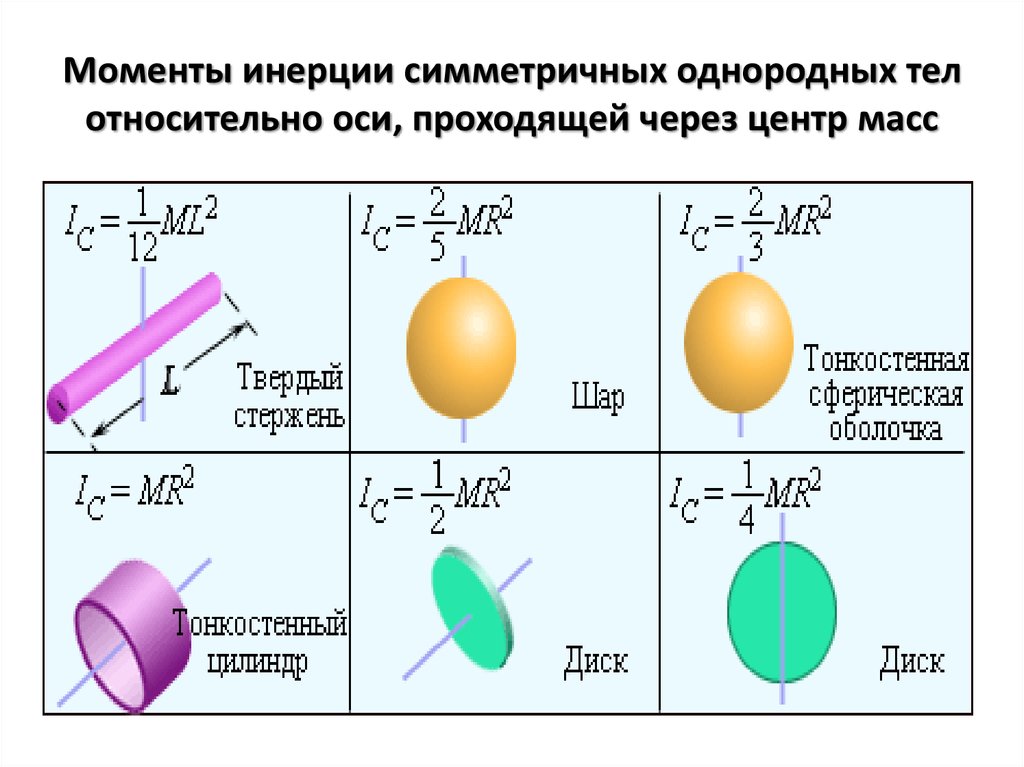 е. оси симметрии одновременно являются и центральными осями.
е. оси симметрии одновременно являются и центральными осями.
Будем также иметь в виду,
что статический момент сложной фигуры относительно некоторой оси
равен сумме статических моментов относительно той же оси простых
фигур, на которые может быть разбита исходная сложная фигура:
Рис. 9.16. Схема к определению координат центра тяжести сложной фигуры.
Для решения этой задачи
выберем две оси координат х и у , совпадающие со сторонами
фигуры. Разобьем фигуру, все размеры которой должны быть известны,
на элементарные части – прямоугольники – координаты центров тяжести
которых очевидны, так как эти части симметричны. Составим теперь
выражения для вычисления статического момента всей площади, например
относительно оси у . Это можно сделать двумя способами:
а) взять сумму статических
моментов отдельных площадей
В этих выражениях F – площадь всей фигуры;
– координата ее центра тяжести;
– площади отдельных частей фигуры, а
– координаты их центров тяжести.
Приравнивая друг к другу
написанные выше формулы, получим уравнение с одной неизвестной :
Аналогично этому расстояние центра тяжести фигуры от оси х может быть выражено так:
Составляя интеграл, в
котором подынтегральное выражение представляет собой произведение
элемента площади на квадрат расстояния до начала координат (рис.
9.17), получим полярный момент инерции :
Отметим еще одну характеристику,
в которой площадка dF умножается на произведение координат
Эту величину называют центробежным моментом инерции . Приведенные
моменты инерции измеряются в единицах длины” взятой в четвертой
степени (, ).
Осевые и полярные моменты
инерции фигуры – величины положительные и не могут быть равными
нулю. Центробежный момент инерции в зависимости от положения осей
может быть положительным или отрицательным, а также равным нулю.
Две взаимно перпендикулярные оси, относительно которых центробежный
момент инерции равен нулю, называют главными осями инерции и обозначаются . Для симметричной
фигуры ось симметрии является и главной осью.
Для симметричной
фигуры ось симметрии является и главной осью.
Осевые моменты инерции,
определенные относительно главных осей, имеют максимальное и минимальное
значения.
Так же как и для статического
момента, момент инерции сложной фигуры равен сумме моментов инерции
образующих ее фигур. Подчеркнем, что сказанное справедливо в том
случае, когда все моменты инерции вычисляются относительно одной
и той же оси.
Для моментов инерции
существует еще одно правило, часто используемое в расчетах. Применительно
к осевым моментам оно “формулируется следующим образом: момент
инерции фигуры относительно оси, параллельной центральной, равен
моменту инерции относительно центральной оси плюс произведение площади
фигуры, на квадрат расстояния между осями (рис. 9.18):
Для центробежных моментов инерции соответствующее правило в аналитическом
виде выглядит так:
Для получения значения
момента инерции конкретной фигуры в принципе надо решить соответствующий
интеграл по площади этой фигуры. Однако с целью облегчения инженерных
расчетов такие интегралы для наиболее распространенных форм поперечных
сечений строительных элементов уже решены и результаты решений в
виде формул представлены в таблицах, одна из которых помещена в
приложении 3.
Однако с целью облегчения инженерных
расчетов такие интегралы для наиболее распространенных форм поперечных
сечений строительных элементов уже решены и результаты решений в
виде формул представлены в таблицах, одна из которых помещена в
приложении 3.
Кроме того, в ГОСТах
на все стандартные профили проката, выпускаемые в нашей стране (уголки,
двутавры и др.), даются значения осевых моментов инерции и других
геометрических характеристик для каждого типоразмера проката (см.
приложение 4).
Наконец, для сложных
по форме сечений моменты инерции определяют, используя изложенные
выше два правила: о сложении моментов инерции и о пересчете моментов
инерции относительно одних осей на другие оси.
Момент
сопротивления . Осевым моментом сопротивления плоской фигуры
относительно какой-либо оси, лежащей в плоскости фигуры, называется
частное от деления момента инерции относительно той же оси на расстояние
до наиболее удаленной точки фигуры (см. рис. 9.17):
Моменты сопротивления имеют размерность длины в кубе (,
).
Формулы для расчетов
осевых моментов сопротивлений наиболее часто встречающихся фигур
приведены в приложении 3, а конкретные значения этой характеристики
для профилей стального проката даны в ГОСТах (приложение 4). Отметим,
что в отличие от моментов инерции моменты сопротивления складывать
нельзя.
Радиус
инерции . Радиусом инерции называется величина, получаемая по
формуле
а для круга диаметром d радиус инерции относительно оси,
проходящей через центр круга, равен
Сфера применения рассмотренных выше геометрических характеристик сечений будет раскрыта при изучении видов деформаций, которым посвящены следующие подразделы настоящей главы.
I = ∑r i 2 dF i =∫r 2 dF (1.1)
В принципе и определение и формула, его описывающая, не сложные и запомнить их намного легче, чем вникнуть в суть. Но все-таки попробуем разобраться, что же такое момент инерции и откуда он взялся.
Понятие момент инерции пришло в сопромат и строительную механику из другого раздела физики, изучающего кинематику движения, в частности вращательное движение. Но все равно начнем издалека.
Я точно не знаю, упало ли Исааку Ньютону на голову яблоко, упало оно рядом, или вообще не падало, теория вероятности допускает все эти варианты (к тому же в этом яблоке слишком много от библейской легенды о древе познания), однако я уверен, что Ньютон был наблюдательным человеком, способным делать выводы из своих наблюдений. Так наблюдательность и воображение позволили Ньютону сформулировать основной закон динамики (второй закон Ньютона), согласно которому масса тела m , умноженная на ускорение a , равна действующей силе Q (вообще-то более привычным для силы является обозначение F, но так как дальше мы будем иметь дело с площадью, которая также часто обозначается как F, то я использую для внешней силы, рассматриваемой в теоретической механике как сосредоточенная нагрузка, обозначение Q, сути дела это не меняет):
Q = ma (1.2)
По мне величие Ньютона именно в простоте и понятности данного определения. А еще, если учесть, что при равноускоренном движении ускорение а равно отношению приращения скорости ΔV к периоду времени Δt , за который скорость изменилась:
a = Δv/Δt = (v – v о)/t (1. 3.1)
при V о = 0 a = v/t (1.3.2)
то можно определить основные параметры движения, такие как расстояние, скорость, время и даже импульс р , характеризующий количество движения:
p = mv (1.4)
Например, яблоко, падающее с разной высоты под действием только силы тяжести, будет падать до земли разное время, иметь разную скорость в момент приземления и соответственно разный импульс. Другими словами, яблоко, падающее с бóльшей высоты, будет дольше лететь и сильнее треснет по лбу незадачливого наблюдателя. И все это Ньютон свел к простой и понятной формуле.
А еще Ньютон сформулировал закон инерции (первый закон Ньютона): если ускорение а = 0 , то в инерциальной системе отсчета невозможно определить, находится ли наблюдаемое тело, на которое не действуют внешние силы, в состоянии покоя или движется прямолинейно с постоянной скоростью. Это свойство материальных тел сохранять свою скорость, пусть даже и нулевую, называется инертностью. Мерой инертности является инерционная масса тела. Иногда инерционная масса называется инертной, но сути дела это не меняет. Считается, что инерционная масса равна гравитационной массе и потому часто не уточняется, какая именно масса имеется в виду, а упоминается просто масса тела.
Не менее важным и значимым является и третий закон Ньютона, согласно которому сила действия равна силе противодействия, если силы направлены по одной прямой, но при этом в противоположные стороны . Не смотря, на кажущуюся простоту, и этот вывод Ньютона гениален и значение этого закона трудно переоценить. Об одном из применений этого закона чуть ниже.
Однако данные положения справедливы только для тел, движущихся поступательно, т.е. по прямолинейной траектории и при этом все материальные точки таких тел двигаются с одинаковой скоростью или одинаковым ускорением. При криволинейном движении и в частности при вращательном движении, например, когда тело вращается вокруг своей оси симметрии, материальные точки такого тела перемещаются в пространстве с одинаковой угловой скоростью w , но при этом линейная скорость v у различных точек будет разная и эта линейная скорость прямо пропорциональна расстоянию r от оси вращения до этой точки:
v = wr (1. 5)
при этом угловая скорость равна отношению приращения угла поворота Δφ к периоду времени Δt , за который угол поворота изменился:
w = Δφ/Δt = (φ – φ о)/t (1.6.1)
при φ о = 0 w = φ/t (1.7.2)
соответственно нормальное ускорение а n при вращательном движении равно:
a n = v 2 /r = w 2 r (1.8)
И получается, что для вращательного движения мы не можем прямо использовать формулу (1.2), так как при вращательном движении одного только значения массы тела недостаточно, требуется еще знать распределение этой массы в теле. Получается, что чем ближе материальные точки тела к оси вращения, тем меньшую силу требуется приложить, чтобы заставить тело вращаться и наоборот, чем дальше материальные точки тела от оси вращения, тем большую силу нужно приложить, чтобы заставить тело вращаться (в данном случае речь идет о приложении силы в одной и той же точке). К тому же при вращении тела более удобно рассматривать не действующую силу, а вращающий момент, так как при вращательном движении точка приложения силы также имеет большое значение.
Поразительные свойства момента нам известны со времен Архимеда и если применить понятие момента к вращательному движению, то значение момента М будет тем больше, чем больше расстояние r от оси вращения до точки приложения силы F (в строительной механике внешняя сила часто обозначается как Р или Q ):
М = Qr (1.9)
Из этой также не очень сложной формулы выходит, что если сила будет приложена по оси вращения, то никакого вращения не будет, так как r = 0, а если сила будет приложена на максимальном удалении от оси вращения, то и значение момента будет максимальным. А если мы подставим в формулу (1.9) значение силы из формулы (1.2) и значение нормального ускорения и формулы (1.8), то получим следующее уравнение:
М = mw 2 r·r = mw 2 r 2 (1.10)
В частном случае когда тело является материальной точкой, имеющей размеры намного меньше, чем расстояние от этой точки до оси вращения, уравнение (1.10) применимо в чистом виде. Однако для тела, вращающегося вокруг одной из своих осей симметрии, расстояние от каждой материальной точки составляющей данное тело, всегда меньше одного из геометрических размеров тела и потому распределение массы тела имеет большое значение, в этом случае требуется учесть эти расстояния отдельно для каждой точки:
M = ∑r i 2 w 2 m i (1.11.1)
М с = w 2 ∫r 2 dm
И тогда получается, что согласно третьему закону Ньютона в ответ на действие вращающего момента будет возникать так называемый момент инерции I . При этом значения вращающего момента и момента инерции будут равны, а сами моменты направлены в противоположные стороны. При постоянной угловой скорости вращения, например w = 1, основными величинами, характеризующими вращающий момент или момент инерции будут масса материальных точек, составляющих тело, и расстояния от этих точек до оси вращения. В итоге формула момента инерции примет следующий вид:
[- М] = I = ∑r i 2 m i (1. 12.1)
I c = ∫r 2 dm (1.11.2) – при вращении тела вокруг оси симметрии
где I – общепринятое обозначение момента инерции, I c – обозначение осевого момента инерции тела, кг/м 2 . Для однородного тела, имеющего одинаковую плотность ρ по всему объему тела V формулу осевого момента инерции тела можно записать так:
I c = ∫ρr 2 dV (1.13)
Таким образом момент инерции является мерой инертности тела при вращательном движении, подобно тому как масса является мерой инертности тела при поступательном прямолинейном движении .
Все круг замкнулся. И тут может возникнуть вопрос, какое отношение все эти законы динамики и кинематики имеют к расчету статических строительных конструкций? Оказывается, что ни на есть самое прямое и непосредственное. Во-первых потому, что все эти формулы выводились физиками и математиками в те далекие времена, когда таких дисциплин, как “Теоретическая механика” или “Теория сопротивления материалов” попросту не существовало. А во-вторых потому, что весь расчет строительных конструкций и построен на основе указанных законов и формулировок и пока ни кем не опровергнутом утвержении о равенстве гравитационной и инертой масс. Вот только в теории сопротивления материалов все еще проще, как ни парадоксально это звучит.
А проще потому, что при решении определенных задач может рассматриваться не все тело, а только его поперечное сечение, а при необходимости несколько поперечных сечений. Но в этих сечениях действуют такие же физические силы, правда имеющие несколько иную природу. Таким образом, если рассматривать некое тело, длина которого постоянна, а само тело является однородным, то если не учитывать постоянные параметры – длину и плотность (l = const, ρ = const ) – мы получим модель поперечного сечения. Для такого поперечного сечения с математической точки зрения будет справедливым уравнение:
I р = ∫r 2 dF (2.1) → (1.1)
где I p – полярный момент инерции поперечного сечения, м 4 . В итоге мы получили формулу, с которой начинали (а вот стало ли понятнее, что такое момент инерции сечения, не знаю).
Так как в теории сопротивления материалов часто рассматриваются прямоугольные сечения, да и прямоугольная система координат более удобна, то при решении задач обычно рассматриваются два осевых момента инерции поперечного сечения:
I z = ∫y 2 dF (2.2.1)
I y = ∫z 2 dF (2.2.2)
Рисунок 1 . Значения координат при определении осевых моментов инерции.
Тут может возникнуть вопрос, почему использованы оси z и у , а не более привычные х и у ? Так уж сложилось, что определение усилий в поперечном сечении и подбор сечения, выдерживающего действующие напряжения, равные приложенным усилиям – две разные задачи. Первую задачу – определение усилий – решает строительная механика, вторую задачу – подбор сечения – теория сопротивления материалов. При этом в строительной механике рассматривается при решении простых задач достаточно часто стержень (для прямолинейных конструкций), имеющий определенную длину l , а высота и ширина сечения не учитываются, при этом считается, что ось х как раз и проходит через центры тяжести всех поперечных сечений и таким образом при построении эпюр (порой достаточно сложных) длина l как раз и откладывается по оси х , а по оси у откладываются значения эпюр. В то же время теория сопротивления материалов рассматривает именно поперечное сечение, для которого важны ширина и высота, а длина не учитывается. Само собой при решении задач теории сопротивления материалов, также порой достаточно сложных используются все те же привычные оси х и у . Мне такое положение дел кажется не совсем правильным, так как не смотря на разницу, это все же смежные задачи и потому будет более целесообразным использование единых осей для рассчитываемой конструкции.
Значение полярного момента инерции в прямоугольной системе координат будет:
I р = ∫r 2 dF = ∫y 2 dF + ∫z 2 dF (2.3)
Так как в прямоугольной системе координат радиус – это гипотенуза прямоугольного треугольника, а как известно квадрат гипотенузы равен сумме квадратов катетов. А еще существует понятие центробежного момента инерции поперечного сечения:
I xz = ∫xzdF (2.4)
Среди осей прямоугольной системы координат, проходящих через центр тяжести поперечного сечения, есть две взаимно-перпендикулярные оси, относительно которых осевые моменты инерции принимают максимальное и минимальное значение, при этом центробежный момент инерции сечения I zy = 0 . Такие оси называют главными центральными осями поперечного сечения, а моменты инерции относительно таких осей – главными центральными моментами инерции
Когда в теории сопротивления материалов речь заходит о моментах инерции, то как правило в виду имеются именно главные центральные моменты инерции поперечного сечения. Для квадратных, прямоугольных, круглых сечений главные оси будут совпадать с осями симметрии. Моменты инерции поперечного сечения также называют геометрическими моментами инерции или моментами инерции площади, но суть от этого не изменяется.
В принципе самому определять значения главных центральных моментов инерции для поперечных сечений наиболее распространенных геометрических форм – квадрата, прямоугольника, круга, трубы, треугольника и некоторых других – большой необходимости нет. Такие моменты инерции давно определены и широко известны. А при расчете осевых моментов инерции для сечений сложной геометрической формы справедлива теорема Гюйгенса-Штейнера:
I = I c + r 2 F (2. 5)
таким образом, если известны площади и центры тяжести простых геометрических фигур, составляющих сложное сечение, то определить значение осевого момента инерции всего сечения не составит труда. А для того, чтобы определить центр тяжести сложного сечения, используются статические моменты поперечного сечения. Более подробно статические моменты рассматриваются в другой статье, здесь лишь добавлю. Физический смысл статического момента следующий: статический момент тела – это сумма моментов для материальных точек, составляющих тело, относительно некоторой точки (полярный статический момент) или относительно оси (осевой статический момент), а так как момент – это произведение силы на плечо (1.9), то и определяется статический момент тела соответственно:
S = ∑M = ∑r i m i = ∫rdm (2.6)
и тогда полярный статический момент поперечного сечения будет:
S р = ∫rdF (2.7)
Как видим, определение статического момента сходно с определением момента инерции. Но есть и принципиальная разница. Статический момент потому и называется статическим, что для тела, на которое действует сила тяжести, статический момент равен нулю относительно центра тяжести. Другими словами такое тело находится в состоянии равновесия, если опора приложена к центру тяжести тела. А согласно первому закону Ньютона такое тело или находится в состоянии покоя или движется с постоянной скоростью, т.е. ускорение = 0. А еще с чисто математической точки зрения статический момент может быть равен нулю по той простой причине, что при определении статического момента необходимо учитывать направление действия момента. Например относительно осей координат, проходящих через центр тяжести прямоугольника, площади верхней части и нижней части прямоугольника будут положительными так как символизируют силу тяжести, действующую в одном направлении. При этом расстояние от оси до центра тяжести можно рассматривать как положительное (условно: момент от силы тяжести верхней части прямоугольника пытается вращать сечение по часовой стрелке), а до центра тяжести нижней части – как отрицательное (условно: момент от силы тяжести нижней части прямоугольника пытается вращать сечение против часовой стрелки). А так как такие площади численно равны и равны расстояния от центров тяжести верхней части прямоугольника и нижней части прямоугольника, то сумма действующих моментов и составит искомый 0.
S z = ∫ydF = 0 (2.8)
А еще этот великий ноль позволяет определять опорные реакции строительных конструкций. Если рассматривать строительную конструкцию, к которой приложена например сосредоточенная нагрузка Q в некоторой точке, то такую строительную конструкцию можно рассматривать, как тело с центром тяжести в точке приложения силы, а опорные реакции в этом случае рассматриваются, как силы приложенные в точках опор. Таким образом зная значение сосредоточенной нагрузки Q и расстояния от точки приложения нагрузки до опор строительной конструкции, можно определить опорные реакции. Например для шарнирно опертой балки на двух опорах значение опорных реакций будет пропорционально расстоянию до точки приложения силы, а сумма реакций опор будет равна приложенной нагрузке. Но как правило при определении опорных реакций поступают еще проще: за центр тяжести принимается одна из опор и тогда сумма моментов от приложенной нагрузки и от остальных опорных реакций все равно равна нулю. В этом случае момент от опорной реакции относительно которой составляется уравнение моментов, равен нулю, так как плечо действия силы = 0, а значит в сумме моментов остаются только две силы: приложенная нагрузка и неизвестная опорная реакция (для статически определимых конструкций).
Таким образом принципиальная разница между статическим моментом и моментом инерции в том, что статический момент характеризует сечение, которое сила тяжести как бы пытается сломать пополам относительно центра тяжести или оси симметрии, а момент инерции характеризует тело, все материальные точки которого перемещаются (или пытаются переместиться в одном направлении). Возможно, более наглядно представить себе эту разницу помогут следующие достаточно условные расчетные схемы для прямоугольного сечения:
Рисунок 2 . Наглядная разница между статическим моментом и моментом инерции.
А теперь вернемся еще раз к кинематике движения. Если проводить аналогии между напряжениями, возникающими в поперечных сечениях строительных конструкций, и различными видами движения, то в центрально растягиваемых и центрально сжатых элементах возникают напряжения равномерные по всей площади сечения. Эти напряжения можно сравнить с действием некоторой силы на тело, при котором тело будет двигаться прямолинейно и поступательно. А самое интересное, это то, что поперечные сечения центрально-растянутых или центрально сжатых элементов действительно движутся, так как действующие напряжения вызывают деформации. И величину таких деформаций можно определить для любого поперечного сечения конструкции. Для этого достаточно знать значение действующих напряжений, длину элемента, площадь сечения и модуль упругости материала, из которого изготовлена конструкция.
У изгибаемых элементов поперечные сечения также не остаются на месте, а перемещаются, при этом перемещение поперечных сечений изгибаемых элементов подобно вращению некоего тела относительно некоторой оси. Как вы уже наверное догадались, момент инерции позволяет определить и угол наклона поперечного сечения и перемещение Δl для крайних точек сечения. Эти крайние точки для прямоугольного сечения находятся на расстоянии, равном половине высоты сечения (почему – достаточно подробно описано в статье “Основы сопромата. Определенение прогиба “). А это в свою очередь позволяет определить прогиб конструкции.
А еще момент инерции позволяет определить момент сопротивления сечения . Для этого момент инерции нужно просто разделить на расстояние от центра тяжести сечения до наиболее удаленной точки сечения, для прямоугольного сечения на h/2. А так как исследуемые сечения не всегда симметричны, то значение момента сопротивления может быть разным для разных частей сечения.
А началось все с банального яблока… хотя нет, начиналось все со слова.
Результат расчетов зависит не только от площади сечения, поэтому при решении задач по сопромату не обойтись без определения геометрических характеристик фигур
: статических, осевых, полярного и центробежного моментов инерции. Обязательно необходимо уметь определять положение центра тяжести сечения (от положения центра тяжести зависят перечисленные геометрические характеристики). К дополнению к геометрическим характеристикам простых фигур: прямоугольника, квадрата, равнобедренного и прямоугольного треугольников, круга, полукруга
. Указаны центр тяжести и положение главных центральных осей, и определены относительно них геометрические характеристики при условии, что материал балки однородный.
Геометрические характеристики прямоугольника и квадрата
Осевые моменты инерции прямоугольника (квадрата)
Геометрические характеристики прямоугольного треугольника
Осевые моменты инерции прямоугольного треугольника
Геометрические характеристики равнобедренного треугольника
Осевые моменты инерции равнобедренного треугольника
Крутящий момент и момент инерции: подробные объяснения и проблемы
В статье рассматривается связь между крутящим моментом и моментом инерции вращающегося тела и ее решаемые задачи.
Крутящий момент и момент инерции поддерживают вращательное движение тела. Когда на тело наводится крутящий момент, оно начинает ускоряться обратно пропорционально его моменту инерции. Вот почему крутящий момент, действующий на тело, является произведением его момента инерции и углового ускорения.
Законы движения Ньютона заявить, что тело остается неподвижным или движется из одной точки в другую с определенной скоростью; если на него не действует внешняя сила. Это означает, что тело получает ускорение, зависящее от его полной массы и силы приложенной внешней силы.
Используя принцип Ньютона во вращательном движении, когда крутящий момент или момент силы создается на неподвижном или движущемся теле, оно инициирует угловое ускорение. Поэтому каждое твердое тело, совершая вращательное движение вокруг своей оси, несет угловое ускорение когда возникает крутящий момент.
В предыдущих статьях мы поняли, что инерция – это свойство тела, выражающееся в стремлении тела сопротивляться движению. Поэтому инерция обратно пропорциональна ускорению тела.. Следовательно, первый закон движения Ньютона также назвал Закон инерции.
Крутящий момент и момент инерцииКаждая частица внутри такого вращающегося тела имеет свою массу, и все они вращаются вокруг центральной оси вращения тела. Следовательно, величина крутящего момента, необходимая для ускорения частиц внутри тела, зависит от распределения массы всего тела. Величина тела, выражающая распределение массы, называетсямомент инерции”.
(Кредит: Shutterstock)
При вращательном движении под величиной инерции понимается момент инерции тела, определяемый интегрированием полных масс М частиц и их расстояний R от оси его вращения.
Следовательно, момент инерции тела (I) равен я = МР2.
Крутящий момент и момент инерцииЗаконы движения Ньютона связывают крутящий момент и момент инерции при вращательном движении.
Когда мы включаем вентилятор, мы наводим на него крутящий момент. Теперь ускорение вентилятора будет зависеть от того, насколько велик момент инерции вентилятора и насколько крутящий момент нам нужно вызвать.
The moment of inertia is the rotational mass of the body, whereas torque is the rotational force functioning on it. The torque τ needed to be induced on the body is proportional to both угловое ускорение и момент инерции. Но момент инерции I уменьшает угловое ускорение α of the body.
Утверждение дает связь между крутящим моментом и моментом инерции как,
τ=1α
Крутящий момент и момент инерцииЧитать о крутящем моменте и угловом моменте
Какой крутящий момент необходим для вращения со скоростью 15 рад/с?2 чтобы тело имело момент инерции 5 кгм2?Данный:
я = 5 кгм2
α = 15 рад/с2
Найти: τ =?
Формула:
τ = I α
Решения:
Крутящий момент, необходимый для того, чтобы заставить тело вращаться со скоростью 15 рад/с.2 рассчитывается с использованием соотношение между крутящим моментом и моментом инерции,
τ= I α
Подставляя все значения,
τ = 5 x 15
τ= 75
Крутящий момент, необходимый для поворота кузова, составляет 75 Нм.
Данный:
М = 4 кг
R = 2 м
α = 5 рад/с2
Найти: τ =?
Формула:
τ = I α
Решения:
Крутящий момент, необходимый для тела, рассчитывается как
т = Iα
Но момент инерции диска равен I = MR.2.
τ = MR2α
Подставляя все значения,
τ = 4 x 22 х 5
τ = 4 x 4 x 5
τ = 80
Крутящий момент, необходимый для поворота кузова, составляет 80 Нм.
Формула крутящего момента и момента инерцииФормула крутящего момента и момента инерции легко определяется путем замены линейного эквивалента в формуле закона движения Ньютона его угловым эквивалентом.
The torque τ is the angular equivalent to the applied force F, and the moment of inertia I is the angular equivalent of the mass m. Hence, Newton’s law of motion (F = ma) for rotational motion becomes,
т = Iα
Как найти крутящий момент по моменту инерцииКрутящий момент от момента инерции является производным от изменения углового момента.
Вращательное движение также подчиняется законам движения Ньютона. Поэтому, когда на тело действует крутящий момент, его угловой момент изменяется из-за ускорения. Поскольку угловой момент является произведением инерции и угловой скорости, мы можем получить необходимый крутящий момент из его момента инерции.
Формула крутящего момента и момента инерции (Кредит: Shutterstock)Игровой автомат угловая импульс тела, когда крутящий момент is induced is given by L = r x P
Где P линейный импульс. т. е. P = mv
L = r x mv
The relation between linear velocity v and angular velocity ω is (r x ω )
L = r x m (r x ω)
L = mr2ω
Но мистер2 срок принадлежит момент инерции (I).
L = I ω
Мы узнали, что крутящий момент, действующий на тело, представляет собой скорость изменения углового момента..
τ = dL/dt
Подставляя формула углового момента,
τ = dIω/dt
τ = Idω/dt
The term dω/dt is the угловое ускорение [latex]\alpha[/latex] of the body. i.e., α= dω/dt
Наконец, крутящий момент получается из момента инерции,
τ = lα
Читать о крутящем моменте и скорости
Диск массой 0.1 кг и радиусом 1 м вращается со скоростью 2 рад/с.2. The moment of inertia of the disc is I = 1/2mr2. Рассчитайте крутящий момент, действующий на диск.Данный:
m = 0.1 кг
г = 1 м
α = 2 рад/с2
Найти: τ=?
Формула:
τ = I α
Решения:
Крутящий момент, создаваемый диском, рассчитывается как
τ= I α
For disc, the moment of inertia is I = 1/2mr2 ……………. .(Дано)
τ= 1/2mr2 α
Подставляя все значения,
τ = 1/2 x 0.1 x 12 x2
τ= 0.2/2
τ = 0.2/2
τ = 0.1
Крутящий момент на диске составляет 0.1 Нм.
Тонкий стержень массой 100 кг и длиной 6 м вращается со скоростью 20 рад/с.2. The moment of inertia of the thin rod is I =1/12mr2. Рассчитайте крутящий момент на тонком стержне.Данный:
m = 100 кг
г = 6 м
α= 20 rad/s2
Найти: τ =?
Формула:
τ = I α
Решения:
Крутящий момент, действующий на тонкий стержень, рассчитывается как
τ = I α
For thin rod, the moment of inertia is I = 1/12mr2 ……………..(Дано)
τ= 1/12mr2α
Подставляя все значения,
τ = 1/12 x 100 x 62 х 20
τ= 72000/12
τ = 6000
Крутящий момент на диске составляет 6000 Нм.
Момент инерции
Момент инерции. Момент инерции – это величина равная сумме произведений всех масс на квадраты их расстояний от некоторой оси,
I=S miri2.
Моменты инерций простейших тел.
1. Материальная точка I=mr2.
2. Тонкий однородный стержень I=1/12ml2, при оси проходящей через его центр масс.
3. Обруч I=mr2.
4. Диск I=1/2mr2.
5. Шар I=2/5mr2.
Момент инерции для сплошного цилиндра
dI=miri2=ρ*Vi* ri2=ρ*2*π* ri*h*dr*r2
dI=2*π*ρ*h* ri3*dr
I=2*π*ρ*h{0-R}∫ ri3dr
I=2*π*ρ*h*(R4/4)-(m*R2/2)
I=1/2*m*R2
Кинетическая энергия вращающения.
Ek=Σ(miw2Ri2)/2=w2/2*ΣmiRi2
Ek=(I*w2)/2 – для вращательного движения тела
Ek=(I*w2)/2+(m*v2)/2 – для
вращательного и поступательного движения.
Момент силы. Моментом силы F относительно некоторой точки O называется векторная величина M, M=r*F*Sina ,r-радиус-вектор l=r*sina , l-плечо силы. M=F*l;
Плечо силы – это кротчайшее расстояние от точки вращения до линии вдоль которой действует сила
Момент силы относительно оси это проекция момента силы относительно любой точки оси на данную ось.
Момент силы относительно оси не зависит от выбора точки на оси.
Уравнение динамики вращательного движения
dt;dS
S;1->2
dS=r*dφ
dA=F*dScosβ
dA=F*r*dφcos(π/2-α)
dA=F*r*dφ*sinα
dA=d*(I*w2)/2=I/2 * 2*w*dw
da=I*w*dw
M*dφ=I*w*dw
Mdφ/dt=I*w*dw/dt
M*w=I*w*dw/dt
M=I*ε, где ε-угловое ускорение
Условие равновесия тел
1.{1-n}ΣMi=0
2.{1-n}ΣFi=0
Момент импульса и закон его сохранения
α-момент импульса
α=m*V*r*sinα
α=m*V*l, l=r*sinα
Деформация твёрдого тела – изменение его формы или объёма. Растяните
резиновый шнур за концы. Очевидно, участки шнура сместятся друг относительно
друга; шнур окажется деформированным – станет длиннее и тоньше. Деформация возникает
всегда, когда различные части тела под действием сил перемещаются неодинаково.
Шнур, после прекращения действия на него сил, возвращается в исходное состояние. Деформации, которые полностью исчезают после прекращения действия внешних сил, называются упругими. Кроме резинового шнура, упругие деформации испытывают пружина, стальные шарики при столкновении и т.д.
Теперь сожмите кусочек пластилина. В ваших руках он легко примет любую форму. Первоначальная форма пластилина не восстановится сама собой. Пластилин “не помнит” какая форма бы у него сначала. Деформации, которые не исчезают после прекращения действия внешних сил, называются пластическими. Пластическую деформацию, при небольших, но не кратковременных воздействиях испытывают воск, клина, свинец.
Деформация растяжения (сжатия). Если к одному стержню, закреплённому
одним концом, приложить силу F вдоль оси стержня в направлении от этого
конца (рис. 2), то стержень подвергнется деформации растяжения. Деформацию
растяжения характеризуют абсолютным удлинением.
Dl = l – l0
и относительным удлинением
e = Dl / l0
где l0 – начальная длинна, а l– конечная длинна стержня.
Деформацию растяжения испытывают тросы, канаты, цепи в подъёмных устройствах, стяжки между вагонами и т.д.
При малых растяжениях (l0<<l), деформации большинства тел упругие.
Если на тот же стержень подействовать силой F, направленной к закреплённому концу (рис. 3), то стержень подвергнется деформации сжатия. В этом случае относительная деформация отрицательна: e< 0.
При растяжении или сжатии изменяется площадь поперечного
сечения тела. Это можно обнаружить, если растянуть резиновую трубку, на которую
предварительно надето металлическое кольцо. При достаточно сильном растяжении
кольцо падает. При сжатии, наоборот, площадь поперечного сечения тела
увеличивается.
Для упругих деформаций справедлив закон Гука
Fy=-RΔl
σ=E|ε|
σп-предел прямой пропорциональности
σу-предел упругости
σт-предел текучести
σпр-предел прочности
ДАВЛЕНИЕ
P=F/S давление твердого тела
P=mg/S=ρ*S*h*g/S=ρ*g*h давление столба житкости
Поток житкости – это движение житкости определяемое совокупностью частиц двигающихся в данном направлении изображающ в виде линий тока.
Турбка тока-часть житскости огрнаничиваемая линиями тока.
ρ=const
m1=m2
ρV1=ρV2
S1l1=S2L2
s1V1t=S2V2t
S1V1=S2V2
S1/S2=V2/V1
Уравнение Бернулли:
A=E1-E2
A=mV12/2+mgh1-mV22/2-mgh2
A=-F1l1+F2l2=-p1S1l1+p2s2l2
mV12/2+mgh1+ p1S1l1= p2s2l2+ mV22/2+mgh2
ρV12/2+ρgh1+ p1= p2+ ρV22/2+ρgh2
p1-статическое давление житкости
ρgh-гидростатиеское давление
ρ*V12/2 – динамическое давление
Анализ и разработка измерительной установки для определения момента инерции тел вращения сложной формы
Авторы: Сеферян Артур Ефремович, Нестеров Александр Владимирович
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2012)
Статья просмотрена: 1313 раз
Скачать электронную версию
Библиографическое описание:Сеферян, А. Е. Анализ и разработка измерительной установки для определения момента инерции тел вращения сложной формы / А. Е. Сеферян, А. В. Нестеров. — Текст : непосредственный // Технические науки: теория и практика : материалы I Междунар. науч. конф. (г. Чита, апрель 2012 г.). — Чита : Издательство Молодой ученый, 2012. — С. 70-74. — URL: https://moluch.ru/conf/tech/archive/7/2226/ (дата обращения: 03.10.2022).
Целью
данной научно-исследовательской работы является анализ, выявление
достоинств и недостатков существующих методов, установок и приборов
для определения динамических характеристик тел вращения сложной формы
(рис. 1), на базе исследований разработать методику и прибор для
определения момента инерции тел вращения. Основными критериями для
разработки прибора является: простота измерения, точность,
автоматизация.
Рисунок 1 – тело вращения сложной формы
Момент
инерции является одной из важнейших характеристик деталей технических
устройств, совершающих вращательное движение. В современной технике
распространены установки, в которых измеряется момент инерции тел
различной формы. Рассмотрим основные идеи реализации установок для
определения момента инерции тел вращения. Первая работа такого типа
опубликована в сборнике лабораторных работфизического факультета МГУ
в 1946 г [1]. Прибор представляет собой маховое колесо М (рис.2),
которое может вращаться с очень малым трением относительно
горизонтальной оси. На оси колеса укреплен деревянный вал B, на
который намотана нить, к концу которой прикреплен груз массой m. Если
колесо освободить, то груз начнет опускаться, приводя маховое колесо
во вращение, которое можно считать равноускоренным.
Рисунок 2 – прибор для определения момента инерции тела, методом падающего груза.
- Момент инерции колеса (вместе с осью и валом) вычисляется по формуле:
,
в которой все величины в ее правой части доступны непосредственным измерениям, а ускорение свободного падения g считается известным. Чтобы найти момент инерции только лишь колеса, следует из полученного значения вычесть момент инерции оси и вала. Их значения находят вычислением по формулам для однородных цилиндрических тел известной геометрии и плотности их материала[2].
Момент
инерции твердого тела фигурирует и в работе физического практикума
физического факультета МГУ “Изучение вращательного движения
твердого тела”[3]. Позже эта лабораторная работа с колесом была
усовершенствована. В работе используются два способа
экспериментального определения момента инерции: метод колебаний и
метод вращения. Первый основан на использовании зависимости периода
колебаний физического маятника от его момента инерции. Второй –
на анализе инерционных свойств твердого тела, закрепленного на оси,
при его вращательном движении. Кроме этого, проводится прямой расчет
момента инерции исследуемого тела известной геометрии. Основной
частью установки является сплошное колесо (риc.2),
которое может вращаться вокруг горизонтальной оси. К цилиндру,
расположенному на оси колеса, с помощью нити прикреплен груз. Помещая
груз в устройство для его крепления, получаем физический маятник,
который может колебаться около положения равновесия. Угол отклонения
может быть определен по угломерной шкале. Установка снабжена
системами регистрации периода колебаний колеса и времени опускания
груза[2].
При анализе работ выявлены основные недостатки, предложенных методов:
При исследовании современного рынка измерительных устройств Российской федерации не обнаружены приборы для определения динамических характеристик тел вращения, удовлетворяющих следующим требованиям:
Для
устранения вышесказанных недостатков разработан метод, основанный на
свободном выбеге ротора электродвигателя. Основная идея реализации
измерительной установки основана на нахождении постоянной времени
ротора двигателя Т, которая определяется следующим образом. Как
известно момент вращения двигателя складывается из двух моментов,
момента статического сопротивления и динамического момента:
.
При выбеге двигателя момент вращения двигателя равен нулю. Таким образом из основного уравнения электропривода возможно найти интересующие параметры, такие как постоянная времени. Принимаем, что степень полинома первого порядка[4]. Получаем, что основное уравнение электропривода в данном случае является дифференциальным уравнением первого порядка. Можно сделать вывод, что выбег электродвигателя описывается апериодический звеном первого порядка [5]:
,
,
,
.
Следовательно, если
записать осциллограмму скорости выбега ротора двигателя ротора, можно
вычислить T.
Если же нагрузить ротор двигателя телом вращения и снова записать
осциллограмму скорости, то получим другое значение
.
В первом случае T
равен (рис.3а)[6]:
|
, |
1 |
где jр – момент инерции ротора двигателя, k – коэффициент трения.
Во втором случае равен (рис. 3б) :
|
, |
2 |
где jт – момент инерции тела вращения.
Разрешив уравнение 1 через 2, несложно найти искомое значение момента инерции тела вращения:
Рисунок 3 – к определению постоянной времени
Для проверки предложенного метода собран стенд, состоящий из программной и аппаратной части. В аппаратную часть входит:
а)
двигатель постоянного тока Siemens
1G. 5100-0EC4.
–6WV1;
б)датчик скорости – тахогенератор L117-61026B1-04 ;
в) АЦП-ЦАП Siemens simatic S7-400;
г) Вычислительная машина IBM PC.
Программная часть измерительной установки состоит из прикладной программы «Mеркурий» (рис.4), написанной на языке C++. Общий алгоритм работы программы представлен на рисунке 5.
Двигатель постоянного тока, оснащённый крепежным механизмом для закрепления тел вращения, расположен горизонтально. Встроенный аналоговый тахогенератор подключен к АЦП. Силовой кабель электродвигателя замкнут через твердотелые ключи к ЦАП. ЦАП-АЦП непосредственно подключена к вычислительной машине IBM PC. Управление ЦАП-АЦП происходит непосредственно через прикладную программу «Меркурий».
Рисунок 4 – интерфейс программы «Меркурий»
Общий
принцип работы установки. Оператор размещает испытуемое тело на
крепежном механизме. По команде оператора через программу «Меркурий»
ЦАП подает напряжение на двигатель, параллельно обращаясь к АЦП для
отслеживания скорости вращения ротора двигателя. По достижению
требуемой скорости «Меркурий» снимает напряжение с
двигателя и начинает запись сигнала с тахогенератора. После остановки
ротора двигателя «Меркурий» проводит регрессионный анализ
полученного сигнала. По полученной регрессионной модели вычисляет
постоянную времени, а затем и момент инерции.
Разрабатываемая испытательная установка обладает ряд преимуществ:
малые габариты;
отсутствие гибких элементов;
полностью автоматическое вычисление;
наличие БД для хранения истории измерений.
Рисунок 5 – алгоритм программы
На данный
момент выдуться испытания стенда. Полученные промежуточные данные
свидетельствуют о состоятельности метода. По завершению испытаний
испытательного стенда планируется приступить к промышленному
испытанию.
Литература:
К.П.Яковлев. Определение момента инерции махового колеса динамическим методом. Физ. практикум. Работа 2а.ОГИЗ. М.-Л.,1946 – С.85-88
Козлов В.И. Измерение момента инерции твердых тел в физическом практикуме. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ».М.,2012 – С.213-218
Изучение вращательного движения твердого тела. Физический практикум. Лабораторная работа 10. Под ред. В. И. Ивероновой. М., 1962, – С. 86-90.
Вольдек А.И. Электрические машины. – Л.: Энергия, 1974. – 84 с.
Сеферян А.Е. Разработка метода идентификации математической модели электродвигателя бесконтактным способом.
 Машиностроение. Кр-р, 2011 – С.80-84.
Машиностроение. Кр-р, 2011 – С.80-84.Сеферян А.Е.,Топчий А.Ю., Нестеров А.В. Бесконтактная параметрическая идентификация вращающихся машин. Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики.2011, вып.6(76). – С.142-143.
Основные термины (генерируются автоматически): Меркурий, момент инерции, IBM, вращательное движение, твердое тело, автоматическое вычисление, аппаратная часть, вычислительная машина, горизонтальная ось, известная геометрия.
Похожие статьи
Исследования ветроколес с вертикальной
осью вращенияОднако, это верно лишь для тихоходных роторов с лопастями, сопротивление движению которых различно.
Основные термины (генерируются автоматически): вертикальная ось вращения, компьютерное моделирование, крутящий момент, OECD, лопастная система. ..
Методика изучения
вращательного движения твердого тела…Основные термины (генерируются автоматически): момент импульса, вращательное движение, импульсный момент, неподвижная ось, момент инерции, величина, ось вращения, угловая скорость, ток момента импульса, импульсный ток.
Расчёт деформации приспособления для закрепления концевых…получим следующую формулу для вычисления полярного момента инерции
г) Вычислительная машина IBM PC. Программная часть измерительной установки состоит из прикладной программы «Mеркурий» (рис. 4), написанной на языке C++.
Математическое моделирование взаимодействия ионов…
Основные термины (генерируются автоматически): момент импульса, вращательное движение, импульсный момент, неподвижная ось, момент инерции, величина, ось вращения, угловая скорость, ток…
Решение задачи управления
перемещением квадрокоптера вдоль…Математическая модель квадрокоптера (математическая модель движения твердого тела в
где — масса твердого тела; — ускорение свободного падения; — матрица инерции
Основные термины (генерируются автоматически): MATLAB, канонический вид, угол крена, ось, система. ..
Использование магнитных подвесов при проектировании ВЭУ…
В статье исследуется тема использования магнитных подвесов при проектировании ветроэнергетических установок с вертикальной и горизонтальной осью вращения (ВЭУ).
Корпус ступицы вращается и передает момент вращения генератору ВЭУ.
Анализ условий
устойчивости стационарного движения редуктораМетодика изучения вращательного движения твердого тела… Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости. Если в систему с моментом импульса перенести момент импульса в количестве…
Математическое моделирование
движения плоского. ..…вращательного движения 7–11 (рис. 1.). Рассмотрим алгоритм перемещения
силы (равен 0 — сила приложена вертикально вниз) –момент инерции j-тых звеньев; – момент инерции
РАН. Механика твердого тела, 1998, № 4, с. 86–101. Jatsun S., Zimmerman K., Zeigis I., Jatsun A…
Способ
вращения геометрической фигуры вокруг оси плоскости…Основные термины (генерируются автоматически): фигура, рисунок, окружность круга, круг окружности, окружность, координатная ось, призма, горизонтальная плоскость, осевая линия, геометрическая фигура.
- Как издать спецвыпуск?
- Правила оформления статей
- Оплата и скидки
Похожие статьи
Исследования ветроколес с вертикальной
осью вращенияОднако, это верно лишь для тихоходных роторов с лопастями, сопротивление движению которых различно.
Основные термины (генерируются автоматически): вертикальная ось вращения, компьютерное моделирование, крутящий момент, OECD, лопастная система…
Методика изучения
вращательного движения твердого тела…Основные термины (генерируются автоматически): момент импульса, вращательное движение, импульсный момент, неподвижная ось, момент инерции, величина, ось вращения, угловая скорость, ток момента импульса, импульсный ток.
Расчёт деформации приспособления для закрепления концевых…получим следующую формулу для вычисления полярного момента инерции
г) Вычислительная машина IBM PC. Программная часть измерительной установки состоит из прикладной программы «Mеркурий» (рис.4), написанной на языке C++.
Математическое моделирование взаимодействия ионов…
Основные термины (генерируются автоматически): момент импульса, вращательное движение, импульсный момент, неподвижная ось, момент инерции, величина, ось вращения, угловая скорость, ток…
Решение задачи управления
перемещением квадрокоптера вдоль…Математическая модель квадрокоптера (математическая модель движения твердого тела в
где — масса твердого тела; — ускорение свободного падения; — матрица инерции
Основные термины (генерируются автоматически): MATLAB, канонический вид, угол крена, ось, система. ..
Использование магнитных подвесов при проектировании ВЭУ…
В статье исследуется тема использования магнитных подвесов при проектировании ветроэнергетических установок с вертикальной и горизонтальной осью вращения (ВЭУ).
Корпус ступицы вращается и передает момент вращения генератору ВЭУ.
Анализ условий
устойчивости стационарного движения редуктораМетодика изучения вращательного движения твердого тела… Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости. Если в систему с моментом импульса перенести момент импульса в количестве…
Математическое моделирование
движения плоского. ..…вращательного движения 7–11 (рис. 1.). Рассмотрим алгоритм перемещения
силы (равен 0 — сила приложена вертикально вниз) –момент инерции j-тых звеньев; – момент инерции
РАН. Механика твердого тела, 1998, № 4, с. 86–101. Jatsun S., Zimmerman K., Zeigis I., Jatsun A…
Способ
вращения геометрической фигуры вокруг оси плоскости…Основные термины (генерируются автоматически): фигура, рисунок, окружность круга, круг окружности, окружность, координатная ось, призма, горизонтальная плоскость, осевая линия, геометрическая фигура.
Калькулятор свободного момента инерции (второй момент площади)
Калькулятор поперечного сечения ClearCalcs позволяет пользователю вводить геометрию произвольного поперечного сечения, используя либо простые размеры обычных форм, либо полностью настраиваемые определения контура. Затем он определяет свойства упругости, деформации и/или пластичности этого сечения, включая площадь, координаты центра тяжести, вторые моменты площади/моменты инерции, модули сечения, главные оси, постоянную кручения и многое другое!
Вы можете использовать свойства поперечного сечения из этого инструмента в нашем бесплатном калькуляторе балки.
Регистрация учетной записи ClearCalcs откроет доступ к дополнительным расширенным функциям для проектирования и анализа балок и множества других конструктивных элементов, а также позволит использовать эти пользовательские поперечные сечения в этих проектах. ClearCalcs позволяет выполнять проектирование из стали, бетона и дерева в соответствии со стандартами Австралии, США и ЕС.
Лист разделен на две основные части:
- «Ключевые свойства», где определяется геометрия поперечного сечения.
- «Сводка», где выбирается тип анализа и отображаются рассчитанные свойства.
Также имеется раздел «Комментарии», в котором пользователь может оставить какие-либо конкретные примечания к дизайну. Щелчок по любой из меток ввода/свойства дает описательное справочное объяснение.
1. Введите свойства ключа
Сначала выберите тип поперечного сечения из раскрывающегося меню под диаграммой. Когда вы это сделаете, поля ввода под ним изменятся на те, которые необходимы для данного типа поперечного сечения.
Например, прямоугольник имеет два измерения для его определения: Глубина и Ширина . Оба измерения должны быть больше нуля, но других ограничений нет.
Некоторые другие типы поперечного сечения имеют определенные ограничения. Например, Глубина двутаврового сечения должна быть больше, чем в два раза больше Толщина полки плюс в два раза Внутренний радиус . Подобные ограничения являются просто логическими ограничениями на геометрию; перекрытия или неполные радиусы скругления физически невозможны.
Диаграмма в этом разделе будет отображать поперечное сечение в том виде, в каком оно было введено, а также некоторые ключевые свойства этого поперечного сечения, включая центр тяжести, ориентацию главной оси и, если были выполнены соответствующие типы анализа , пластический центроид и центр сдвига.
Сводка вычислений Выходные данные и типы анализа
Доступны четыре различных варианта анализа типа : «Только упругий», «Упругий + деформация», «Упругий + пластик» и «Все». Самый быстрый вариант по умолчанию — «Только эластичный», в то время как другие параметры также добавляют анализ деформации и/или пластичности. Обратите внимание, что расчет упругости всегда выполняется в каждом варианте. Различные результаты, рассчитанные в каждом из этих типов анализа, описаны ниже:
Анализ упругости
- Угол большой главной оси : Большая главная ось (ось «1») может быть наклонена для несимметричных сечений или может быть под углом 90 градусов, если сечение имеет больше боковых, чем вертикальных жесткость. Это определяет его угол относительно оси X. Обратите внимание, что малая главная ось (ось «2») точно перпендикулярна к ней. Ориентация главной оси также указана на диаграмме поперечного сечения.
- Площадь : Площадь поперечного сечения секции. Это значение обычно используется при определении осевой прочности колонны.
- Первые моменты площади : Первые моменты площади важны для некоторых расчетов сдвига, таких как сдвиговый поток. Обратите внимание, что первые моменты площади берутся относительно центроида и геометрических осей.
- Вторые моменты площади / Моменты инерции : Вторые моменты площади, также известные в технике как моменты инерции, связаны с прочностью на изгиб и прогибом балки. Обратите внимание, что все значения берутся относительно центра тяжести поперечного сечения, хотя значения доступны как для геометрической, так и для главной оси. Полярный момент инерции идентичен для обоих типов осей, так как ось «Z» всегда считается такой же, как ось «3». Произведенный момент инерции по определению равен нулю для главных осей.
- Модули упругого сечения : Модули упругого сечения равны секундным моментам площади / моментам инерции, деленным на расстояние до самого дальнего волокна в поперечном сечении, перпендикулярном оси изгиба. Приведены значения как для положительного, так и для отрицательного изгиба, где положительный изгиб определяется как самая верхняя или самая левая часть поперечного сечения, находящаяся в сжатом состоянии. Значения также предоставляются как для геометрической, так и для главной оси и всегда относятся к центроиду. Н.Б. Модуль упругого сечения также известен как модуль статического сечения.
- Расстояние от центра тяжести до крайних волокон : Расстояние между центром тяжести поперечного сечения и крайним волокном поперечного сечения, перпендикулярно оси изгиба. Секунды моментов площади/моментов инерции, деленные на эти расстояния, будут равны модулям упругого сечения.
- Радиусы вращения : Радиусы вращения представляют собой среднеквадратичное расстояние каждого волокна в поперечном сечении относительно заданной оси. Значения всегда относятся к центроиду и доступны как по геометрической, так и по главной осям. Полярный радиус вращения идентичен для обоих типов осей, так как ось «Z» всегда считается такой же, как ось «3».
- Центроид : Расположение центроида показано на диаграмме поперечного сечения. Наведите указатель мыши на значок зеленого круга, и всплывающая подсказка отобразит точные координаты центроида. Обратите внимание, что исходное положение (0,0) обозначено синим перекрестием.
Анализ коробления
- Постоянная кручения Сен-Венана : Постоянная кручения связана с тем, насколько хорошо поперечное сечение может сопротивляться чистым силам кручения, и обычно используется в формулах потери устойчивости при поперечном кручении.
- Постоянная деформации : При приложении скручивающей или эксцентричной силы поперечное сечение может не только скручиваться, но и деформироваться. Эта константа является мерой того, насколько легко может произойти это искривление, и часто используется в формулах потери устойчивости при поперечном кручении.
- Площади сдвига : Только часть поперечного сечения будет эффективно сопротивляться сдвигающей силе, приложенной вокруг заданной оси (то есть поперечной силе, перпендикулярной данной оси). Показанные значения основаны на интегрировании сдвигового потока, и поэтому они могут не точно соответствовать классическим расчетам, основанным на областях сети.
- Константы моносимметрии : Константы моносимметрии определяют, насколько поперечное сечение близко к симметричному. Константа стремится к нулю, когда поперечное сечение симметрично относительно данной оси.
- Центр сдвига : Расположение центра сдвига показано на диаграмме поперечного сечения. Наведите указатель мыши на значок звездочки, и всплывающая подсказка отобразит точные координаты центра сдвига. Обратите внимание, что исходное положение (0,0) обозначено синим перекрестием.
Анализ пластичности
- Модули пластического сечения : Модули пластического сечения показаны как для геометрической, так и для главной оси. Обратите внимание, что, хотя модуль пластического сечения не зависит от направления изгиба, коэффициент формы, который представляет собой отношение модулей пластического сечения к упругому, зависит от него.
- Пластиковый центроид : Расположение пластикового центроида показано на диаграмме поперечного сечения. Наведите указатель мыши на значок оранжевого квадрата, и всплывающая подсказка отобразит точные координаты пластикового центроида. Обратите внимание, что исходное положение (0,0) обозначено синим перекрестием.
Момент инерции диска – объяснение, вывод и часто задаваемые вопросы
Физика, как мы все знаем, обширная тема. Он уделяет особое внимание техническим, рациональным и статистическим аспектам. Это естественный метод, основанный на реальных экспериментах и математике. В физике предложено несколько теорий и законов, которые говорят об основных составляющих мира, о том, как мир движется, о его типе движения, поведении, об энергии, которую он использует для движения, о тех же темах, касающихся изменения во времени, пространстве и т. д. .
Физика играет жизненно важную роль в соединении похожих, но, казалось бы, разных происшествий. Это помогает людям узнать, как прекрасно синхронизируются движение, время и энергия, чтобы добиться порядка в происходящем. По сути, он действует как полка, которая может рационально организовать вселенную в мозгу людей.
Инерция — это также понятие, показывающее связь между движением, временем и энергией. Для движения существует также неподвижное состояние. Это либо происходит естественным образом, либо достигается сопротивлением. Сопротивление возникает, когда электрические заряды испытывают противодействие в своем потоке. Следующая информация кратко обсуждает момент инерции и момент инерции диска. Давайте теперь посмотрим на это и наберёмся знаний.
Инерция
Сопротивление любого физического объекта любому изменению его скорости называется инерцией. Изменения скорости или направления движения объекта включаются в инерцию. Когда на них не действуют никакие силы, аспектом этого свойства является тенденция объектов продолжать двигаться по прямой линии с постоянной скоростью.
Значение Инерции происходит от латинского слова iners, означающего праздный, вялый. Одним из первичных проявлений массы является Инерция, которая является количественным свойством физических систем. Инерция определяется Исааком Ньютоном как его первый закон в его «Philosophiæ Naturalis Principia Mathematica», в котором говорится:
Врожденная сила материи, или vis insita, есть сила сопротивления, благодаря которой каждый, насколько это возможно, старается сохранить свое нынешнее состояние, будь то равномерное движение или неподвижное движение вперед по прямой линии.
При постоянной скорости объект будет продолжать двигаться с текущей скоростью до тех пор, пока какая-либо другая внешняя сила не вызовет изменение его скорости или направления.
На поверхности Земли инерция часто маскируется эффектами трения, гравитации и сопротивления воздуха, оба из которых имеют тенденцию уменьшать скорость движущихся объектов (обычно до точки покоя). Философ Аристотель был введен в заблуждение, полагая, что объекты могут двигаться только до тех пор, пока к ним приложена сила.
Одним из фундаментальных принципов классической физики является принцип инерции, который до сих пор используется для описания движения объектов и того, как на них влияют приложенные к ним силы.
Момент инерции
Момент инерции иначе известен как момент массы инерции, величина, которая определяет крутящий момент, необходимый для желаемого углового ускорения относительно оси вращения, представляет собой угловую массу или инерцию вращения твердого тела похоже на то, как масса определяет силу, необходимую для желаемого ускорения. Это зависит от выбранной оси и распределения массы тела, при этом большие моменты требуют большего крутящего момента для изменения скорости вращения тела.
В качестве экстенсивного (аддитивного) свойства: для точки массы момент инерции равен произведению массы на квадрат расстояния по перпендикуляру к оси вращения. Сумма моментов инерции составляющих ее подсистем (всех взятых относительно одной оси) есть момент инерции жесткой составной системы. Второй момент массы по отношению к расстоянию от оси является его простейшим определением. Момент инерции относительно оси, перпендикулярной плоскости, скалярная величина, имеет значение для тел, вынужденных вращаться в плоскости. Моменты для тел, которые могут свободно вращаться в трех измерениях, можно понять с помощью асимметричных матриц 3 × 3, с набором, можно сказать, взаимно перпендикулярных главных осей для этой матрицы, является диагональным, а крутящие моменты, которые сами по себе являются силой, вокруг оси действуют независимо друг от друга.
Факторы, влияющие на момент инерции
Основными факторами, влияющими на момент инерции, являются следующие:
Плотность. Плотность материала влияет на момент инерции.
Размер материала
Форма материала
Ось вращения.
Линия точек, относительно которых вращается твердое тело, называется осью вращения.
Площадь момента инерции
Также известен как момент второй площади. Он отображает разброс точек по случайной оси. Его свойство двумерной плоскости.
Полярный момент инерции
Полярный момент инерции измеряет степень сопротивления объекта при приложении крутящего момента к определенной оси. Кручение – это скручивание тела с наложенным на него силовым яблоком.
Полярный момент представляет собой сопротивление, оказываемое цилиндрическим объектом скручиванию, приложенное к площади поперечного сечения, перпендикулярной центральной оси объекта. Величина полярного момента инерции прямо пропорциональна сопротивлению вещи кручению.
Существует три типа поперечных моментов.
Ограничения полярного момента инерции включают невозможность измерения валов и балок, поперечное сечение которых не является цилиндрическим.
Подробнее о моменте инерции и его; различные концепции доступны на платформе обучения Vedantu.
Различие между моментом инерции и полярным моментом инерции
полярный момент инерции | Moment of Inertia |
Объекты «Возможность сопротивления крутящему моменту | |
J = r 2 dA | I = r 2 dm |
Depending on the geometry of the object | В зависимости от массы объекта |
Момент инерции массы
.
Факторы, влияющие на момент инерции массы:
Когда к телу приложена скручивающая сила, момент инерции его массы будет обратно пропорционален угловому ускорению.
В этой статье в основном рассматривается симметричное распределение массы, которое, если не указано иное, с постоянной плотностью по всему объекту и осью вращения, проходящей через центр масс.
Вывод: Масса распределена по всем плоскостям x и y на тонком диске. Затем мы переходим к установлению соотношения для поверхностной плотности массы (σ), где она определяется как масса на единицу площади поверхности. Поверхностная массовая плотность также будет постоянной, так как диск, следовательно, однороден;
σ = m / A
Или
σA = m
Итак,
dm = σ(dA)
кольца, которые в основном тонкие по своей природе. Приращение массы (dm) радиуса r, находящиеся на равном расстоянии от оси, называются тонкими кольцами. Выражение малой площади (dA) каждого кольца через длину (2πr), умноженную на малую ширину колец (dr.), Это дается как: 9{2}\]
Физика обычно считается сравнительно сложным предметом. Особенно, когда речь идет о деривациях и прикладных задачах. Но это совсем не так. При правильной практике и воспитании любви обучение может привести к радикальным изменениям в учебных моделях и мышлении учащихся. Это изменение действительно требует внутреннего толчка, а также опытных преподавателей и хороших учебных материалов. Vedantu предлагает студентам наиболее проверенную версию информации и методов обучения. Индивидуальный коучинг и интегрированный в увлекательное обучение опыт будут формировать образ мышления учащихся и их общий подход к любому предмету, который они пожелают, в красивой манере.
Для получения дополнительной информации посетите веб-сайт Vedantu и найдите огромное количество учебников и решений проблем с учебниками. Есть также персонализированные заметки в формате PDF и справочники от самых любимых учеников Р. Д. Шармы, Лакшми Сингха и многих других. Получайте тонны заметок о пересмотре, пробные тестовые работы, годы образцов работ и удобную для учащихся учебную среду прямо через ваши устройства. Загрузите Веданту сейчас.
Момент инерции в зависимости от массы
Введение в момент инерции Существует множество аналогий при сравнении линейного и вращательного движения. В основе этих сравнений лежат понятия массы с одной стороны и момента инерции с другой. Масса не только является свойством любого физического объекта, но и является мерой сопротивления объекта ускорению, когда к объекту приложена результирующая сила. Второй закон Ньютона выражает это в известном уравнении 9.0319 Ф = мА . По аналогии, момент инерции любого твердого объекта является мерой его сопротивления угловому ускорению вокруг оси, когда к объекту приложен крутящий момент. Это выражается уравнением τ = Iα .
Момент инерции можно определить по уравнению
0320 . Для непрерывных жестких объектов уравнение будет аналогичным, но с использованием интегралов вместо суммы. Следует отметить, что по определению момент инерции тела зависит не только от конкретной оси, вокруг которой оно вращается, но и от его формы и от того, как распределена его масса.
Задание №1. Подготовьте плоский диск и кольцо с одинаковыми массами В этом уроке вы будете сравнивать моменты инерции двух объектов с одинаковыми массами . Вы начнете с использования своих навыков изготовителя, а также некоторых базовых математических навыков, включая алгебру и геометрию. Вы создадите два плоских объекта из картона. Один из объектов будет круглым диском радиуса 3,5″. Другой объект будет кольцом, внешний радиус которого также равен 3,5″, , но масса которого равна массе диска . На рис. 1 показана схема с двумя такими объектами.
Вы хотите определить толщину x кольца, так что , когда два таких концентрических кольца склеены вместе , масса диска будет идентична массе пары концентрических колец. Вы вырежете диск и два кольца из трех листов картона. Вы можете предположить, что бумаги для карточек имеют одинаковую толщину с равномерным распределением массы.
Хорошо, теперь применим математические и геометрические навыки, чтобы определить значение x ! Затем вырежьте плоские объекты из картона и соберите кольцо. Если вы правильно рассчитали, диск и кольцо в сборе должны быть очень близки к одной и той же массе при размещении на весах.
Задание № 2. Определение периода дискового и кольцевого маятников Теперь, когда у вас есть два объекта одинаковой формы, но с разным распределением масс, вы готовы к первому шагу по определению их моментов инерции. Вы будете рассматривать каждый объект как физический маятник — любое твердое тело, которое качается в вертикальной плоскости вокруг оси, проходящей через это тело. На рис. 2 показан произвольный физический маятник и его физическая теория. Уравнение в рамке позволяет определить момент инерции I любого объекта относительно любой конкретной точки поворота на этом объекте. T, G и d поддаются измерению, а g известно.
Вы будете измерять период T с помощью магнитометра PocketLab. Крошечный магнит, прикрепленный скотчем к нижней части физического маятника, будет вызывать внезапный пик магнитуды магнитного поля каждый раз, когда он проходит мимо PocketLab, пока маятник качается вперед и назад. На рис. 3 показаны изображения экспериментальной установки для двух объектов одинаковой массы. В обоих случаях были выбраны похожие опорные точки — опорные точки близко к краю объекта. Маятники качаются на металлическом стержне, который проходит через небольшие отверстия, пробитые в маятниках. Использование металлического стержня желательно и помогает снизить трение в точке поворота.
Рисунок 3. Два одинаковых маятника с одинаковой массой, но с разным распределением масс Для пояснения механизма поворота на рисунке 4 показан вид устройства под углом. Шарнир представляет собой тонкий металлический стержень, закрепленный на кольцевой стойке. Также используется деревянный стержень для дюбеля (или что-то подобное), так как винт зажима не вкручивается достаточно сильно, чтобы прижать металлический стержень к зажиму. Следует надевать защитные очки, чтобы предотвратить любую возможность попадания в глаза тонкого металлического стержня.
Для успеха этого эксперимента необходимо точное измерение периода T каждого из двух ваших маятников. PocketLab позволяет рассчитать период физического маятника гораздо точнее, чем это возможно с помощью секундомера. Использование PocketLab для этой цели исключает ошибки, связанные со временем реакции при запуске и остановке секундомера. PocketLab также должен быть настроен на максимально возможную скорость передачи данных (50 точек в секунду). Убедитесь, что вы измеряете время за несколько периодов, а затем находите среднее значение. На рис. 5 показано, как это можно сделать.
Теперь вы должны быть готовы к измерению периодов двух ваших физических маятников. Эти данные имеют решающее значение для успеха в этом эксперименте!
Задание № 3. Вычисление экспериментальных моментов инерции Теперь, когда вы определили период для двух ваших физических маятников, вы готовы вычислить экспериментальные моменты инерции, используя уравнение в рамке в нижней части рисунка 2. . Вам нужно будет измерить массу каждого маятника. (Помните, что массы должны быть очень близки к одному и тому же значению!) Вам также необходимо измерить расстояние от точки вращения до центра масс каждого маятника. Вы можете использовать принятое значение 90,81 м/с/с для ускорения g силы тяжести. Обязательно выражайте все измерения в системе МКС (метр-килограмм-секунда). Что такое единица измерения MKS для момента инерции? (Подсказка: посмотрите на определяющее уравнение для момента инерции. )
Таблицы теоретических моментов инерции различных форм относительно их центра масс легко доступны в Интернете. Эти теоретические моменты инерции определяются с помощью интегрального исчисления, детали которого не важны для нашего исследования. Рисунок 6 суммирует теоретический момент уравнений инерции о центре масс для плоского диска и кольца. Однако наш диск и кольцо не вращались вокруг соответствующих центров масс. Они вращались вокруг оси очень близко к своим внешним краям . Помните, что момент инерции зависит не только от массы и от того, как она распределена, но и от конкретной оси, вокруг которой она вращается.
Как оказалось, существует простая и чрезвычайно полезная теорема, известная как Теорема о параллельных осях 9.0325 , который выражает отношение между моментом инерции I объекта относительно любой оси и его моментом инерции относительно параллельной оси , проходящей через центр масс. Если Ic — момент инерции относительно центра масс, m — масса объекта, а w — расстояние между двумя осями, эта теорема говорит нам, что момент инерции I определяется выражением уравнение
Используйте теорему о параллельных осях вместе с некоторой алгеброй и уравнениями на рисунке 6, чтобы определить уравнения для момента инерции относительно точки вблизи края плоского диска и кольца. Если ваши оси расположены очень близко к внешнему краю диска и кольца, то можно считать, что w равно внешнему радиусу.
Наконец, вычислите теоретические значения этих моментов инерции из ваших уравнений.
Рисунок 6. Моменты инерции относительно центра масс для диска и кольца Задача № 5. Определите процентную разницу между экспериментальным и теоретическим моментами инерции Сравнения должны быть выражены как процентная разница между и теоретический момент инерции относительно осей вблизи краев, основанный на части теоретического момента инерции. Разница в процентах будет отрицательной, если ваш экспериментальный результат меньше теоретического, и положительной, если экспериментальный результат больше теоретического.
Ваш экспериментальный момент инерции кольца относительно оси его края больше, чем момент инерции диска относительно его края ось? Так и должно быть, если период для кольца был больше периода диска. Проведите обсуждение, которое интуитивно подсказывает, что момент инерции кольца должен быть больше момента инерции диска.
Дополнительные уроки PocketLab, посвященные моменту инерцииДинамика вращения падающего измерительного стержня
PocketLab Voyager: Эксперимент с маховиком
PocketLab Voyager: Момент инерции и сохранение углового момента вращения
9 90
Физический маятник: нахождение момента инерции
терминология – Какова причина использования «момент» в «момент инерции»?
Спросил
Изменено 1 год, 7 месяцев назад
Просмотрено 2к раз
$\begingroup$
Линейная инерция называется массой . Вращательная инерция называется моментом инерции .
Момент инерции — странный выбор термина для этого свойства. Кажется, что это не “соответствует” стилю или шаблону простого термина, такого как 9.0319 масса , хотя это вращательный эквивалент массы. Другие свойства вращения сохраняют закономерность,
- как угловая скорость ,
- угловое ускорение ,
- угловой момент и т.д.;
- , но нет “угловой массы”. Вместо этого неожиданно называется момент инерции .
- Конечно, «угловой силы» также не существует, но, по крайней мере, вместо этого дается простой и понятный термин: .крутящий момент .
Момент инерции действительно кажется странным в группе, ломая все шансы на закономерность.
По-видимому, этот термин ввел Эйлер в своей работе “ Theoria motus corporum solidorum seu hardorum ” от 1765 года. Из выдержек, которые я могу найти из той книги (к сожалению, я не могу читать латынь самой книги), я не могу найти никаких рассуждений за использованием этого конкретного термина.
Слово момент , кажется, происходит от латинского слова импульс , что означает движение/изменение/изменение , и, таким образом, может иметь смысл использовать это слово не только как «короткая продолжительность», но и по отношению к физическому движению. Но это мало объясняет, почему момент инерции внезапно стал выбором свойства.
Какова причина использования термина момента инерции как инерции вращения?
- терминология
$\endgroup$
2
$\begingroup$
Если Эйлер ввел этот термин и не объяснил свои рассуждения, мы можем только догадываться о том, что он имел в виду. За самим Эйлером последовали многие варианты обозначений и терминологии просто потому, что он собрал их вместе в хорошо структурированных и всеобъемлющих книгах.
Но Эйлер, вероятно, следовал прецеденту с «моментом силы». Согласно «Динамике вращения» Уортингтона (1900 г.), оно возникло в результате любопытной метаморфозы значения слова «момент» (первоначально короткой продолжительности), а старое значение все еще существовало, по крайней мере, во время написания Уортингтоном. Согласно EtymOnline, «момент» используется в старофранцузском языке как «важность» с 12 века (в английском языке с 1520-х годов подумайте о «знаменательном»), такое использование в латыни должно было появиться еще раньше.
В «О равновесии плоскостей» Архимед указывал на совместное «значение» силы и места, где она применялась для поддержания равновесия. Латинский перевод Коммандино Архимеда в Liber De Centro Gravitatis Solidorum (1565) звучал так: « Центром тяжести каждой объемной фигуры является та точка внутри нее, относительно которой со всех сторон стоят части с равным моментом ». Здесь можно прочитать «момент» как «важность», но можно также прочитать его как относящийся к какой-то конкретной величине.
Вот так, видимо, и стали читать. «Момент» в физике теперь обычно относится к величинам, умноженным на расстояние, а также к их суммам или интегралам. Высшие моменты связаны с силами расстояния. «Момент» в математике имеет аналогичное значение, только применяется более абстрактно. Вот Уортингтон:
” Слово “момент” впервые было использовано в “Механике” в его теперь довольно старомодном чувство «важности» или «последствия» и момент сила вокруг оси означала важность силы с относительно его способности генерировать в материи вращение вокруг ось; и снова момент инерции тела относительно к оси – это фраза, придуманная, чтобы выразить важность инерция тела, когда мы пытаемся повернуть его ось. Когда мы говорим, что момент силы относительно ось меняется как сила, так и расстояние ее линии действия от оси, мы не столько определяем фразу «момент силы» как выражение результата экспериментов сделано с целью выяснения обстоятельств, какие силы эквивалентны друг другу по своим мощность поворота.
Но слово «момент» также стало употребляться по аналогии в чисто техническом смысле, в таких выражениях, как «момент массы относительно оси» или «момент площади с относительно плоскости», которые в каждом случае требуют определения. В этим случаям не всегда есть соответствующие физические идея, и такие фразы стоят, как исторически, так и научно, на другом основании. ”
$\endgroup$
1
$\begingroup$
Во-первых, «инерционная масса» могла оказаться отличной от «гравитационной массы», и наблюдение того, что они одинаковы, было большой «победой» для физической теории.
Для другого, цитируя википедию,
Инерция — одно из первичных проявлений массы, которая количественное свойство физических систем
Таким образом, инерция, линейная или иная, не то же самое, что масса.
$\endgroup$
1
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.Момент инерции – Everything2.com
Измерение устойчивости объекта к угловому (вращательному) ускорению. Момент инерции зависит от массы, положения оси вращения и формы объекта. Однако в целом момент инерции зависит от концентрации массы на расстоянии от оси вращения. Например, если у вас есть два диска одинакового радиуса, глубины и массы, но один из них полый (как кольцо), у кольца будет больший момент инерции. Подобно массе в кинематике перемещения, объектам с большим моментом инерции требуется больший крутящий момент, чтобы иметь такое же угловое ускорение. Однако, если два объекта вращаются с одинаковой угловой скоростью, то объект с большим моментом инерции будет иметь большую кенетическую энергию.
Момент инерции для вращательного движения равен массе для
линейное движение, но вращательное движение немного усложняет ситуацию. Масса объекта обеспечивает ему инерцию при движении в пространстве. Вы можете выразить это, сказав, что более массивный объект имеет больший импульс, или что требуется больше силы, чтобы изменить движение более массивного объекта. В линейном движении эти идеи выражаются уравнениями
p = m v и F = m a
Аналогично, момент инерции связывает угловую скорость твердого объекта с его угловым моментом и говорит вам, какой крутящий момент требуется для изменения вращательного движения.
Давайте начнем с разговора об объекте, осесимметричном относительно одной оси 1 . В частности, давайте представим кольцо массы M с радиусом R, вращающееся вокруг своей оси симметрии. В этом случае момент инерции можно записать просто как число 9.0003
I = M R 2
Эта величина называется моментом инерции «относительно оси» симметрии. Затем мы можем записать уравнения для углового момента L, углового ускорения α и крутящего момента τ вдоль этой оси.
L = I ω и τ = I α
Эти уравнения выглядят в точности аналогично уравнениям, которые я написал выше для линейного движения. Второе уравнение аналогично второму закону Ньютона и показывает нам, что чем больше момент инерции, тем труднее ускорить или замедлить вращение. Интуитивно вы, вероятно, догадались бы, что чем массивнее объект, тем больше будет его момент инерции, и это правда. Верно также и то, что чем дальше масса от оси вращения, тем труднее заставить ее вращаться. Это потому, что что-то далекое от оси вращения должно делать очень большой круг во время каждого вращения. Когда угловая скорость вращения немного увеличивается, это означает, что теперь эта масса должна вращаться намного быстрее, чтобы совершить круг за один период; таким образом, небольшое угловое ускорение преобразуется в большое тангенциальное ускорение, которое требует большой силы. Эти зависимости отражены в уравнении для кольца I = M R 2 .
Теперь предположим, что у нас есть какой-то другой объект, который вынужден вращаться вокруг определенной оси. Представим, например, что мы взяли какой-то объект и воткнули в него ось, так что теперь объект должен вращаться только вокруг оси. Если представить, что этот объект состоит из множества точечных масс, то каждая точечная масса массой m q , расположенная на расстоянии r ⊥q от оси вращения, измеренная перпендикулярно оси, вносит момент инерция относительно этой оси м q r ⊥q 2 (где q — просто целое число, обозначающее каждую массу). We can get the total moment of inertia with the formula
I = Σ q m q r ⊥q 2
or
I = ∫ r ⊥ 2 dm = ∫ ρ ( r ) r ⊥ 2 dV
для непрерывной системы, где ρ( r ) — массовая плотность, dV — элемент объема. Используя эти формулы, вот моменты инерции для некоторых однородных по плотности объектов массы M с обычными формами:
- Кольцо радиуса R, вращающееся вокруг своей оси симметрии: I = M R 2
- Цилиндр (или диск) радиусом R, вращающийся вокруг своей оси симметрии: I = 1/2 M R 2
- Кольцо радиусом R, вращающееся вокруг оси, перпендикулярной оси симметрии: I = 1/2 M R 2
- Тонкий стержень длиной L, вращающийся вокруг одного конца вокруг оси, перпендикулярной стержню: I = 1/3 M R 2
- Тонкий стержень длиной L, вращающийся вокруг своего центра вокруг оси, перпендикулярной стержню: I = 1/12 M R 2
- Сфера, вращающаяся вокруг диаметра: I = 2/5 M R 2
Для объектов, которые не вращаются вокруг оси симметрии и не вынуждены вращаться вокруг определенной оси, ситуация становится намного сложнее. В общем, момент инерции — это не просто число, это симметричный тензор ранга 2, поэтому вы можете записать его в виде матрицы 3 на 3. Это имеет много последствий, в том числе то, что вектор углового момента не всегда параллелен вектору угловой скорости, и связь между угловым ускорением и крутящим моментом уже не так проста. Некоторые из повседневных ситуаций, в которых эти эффекты проявляются, относятся к прецессии волчки и колебанию футбольного мяча.0215 2 метал со спиральным проходом. В общем случае, когда угловой момент и угловая скорость не совпадают, момент инерции изменяется со временем (при измерении относительно осей неподвижного наблюдателя, иногда называемых осями, «фиксированными в пространстве»), а соотношение крутящего момента и угловое ускорение становится
τ = d L /dt = I α + dI/dt ω
Один из способов справиться с этим – перейти к «осям тела», что означает решение проблемы. как будто сидишь на вращающемся теле. В этом случае момент инерции не меняется во времени, но теперь вы работаете в неинерциальной системе отсчета, где есть псевдосилы, поэтому у вас все еще нет простого уравнения, связывающего крутящий момент и угловое ускорение. Тем не менее, это может быть очень полезным методом.
Мы можем получить полную форму тензора момента инерции из определения углового момента для точечной частицы.
L Q = R Q × P Q
Добавить это во всех частицах (все Q)
L = QLAIN
292129292929292921292 гг. q × p qи
p q = m q ω × r q
so
L = Σ q m q r q × ( ω × r q ) = Σ Q M Q ( ω (R Q ) 2 – R Q ( Ом ° R Q ). Если мы запишем этот компонент за компонентом, то, немного поработав, мы можем получить
I JK = σ Q M Q (Δ JK R Q 2 – R QJ R QK – R QJ R QK – R QJ R QK QK QK QK QK QK QK QK QK QK QK QK QK QK QK . k — это просто числа от 1 до 3 для трех измерений. δ jk — это просто дельта Кронекера, которая равна 1, когда j = k, и 0, когда j ≠ k.
Поскольку I симметричен, его можно диагонализовать с помощью ортогонального преобразования, а это означает, что если мы просто повернем наши координатные оси, мы сможем найти те, где I является диагональным. Три оси этой специальной системы координат называются главными осями тела. Пока тело вращается только вокруг одной из этих осей, вы можете просто использовать значение момента инерции, соответствующее этому элементу на диагонали, известное как главный момент для этой оси. В случаях, когда два или три собственных значения вырождены, может быть более одного набора осей, в которых I является диагональным, как в случае со сферой или диском.
Рассмотрение тензорной природы момента инерции может привести к новым интересным эффектам, таким как прецессия и нутация. Они важны для понимания поведения волчка, гироскопа, вращения Земли и орбит спутников. Это связано с понятием момента, которое также используется в статике. Важным результатом о моменте инерции, который вы часто используете на практике, является теорема о параллельных осях, и углы Эйлера также очень полезны.
Источники:
- Классическая механика , Goldstein, Poole, and Safko, Addison Wesley (2002)
- Newtonian Dynamics , Р. Байерляйн, McGraw Hill (1983)
- Мир физики Эрика Вайсштейна , Эрик В. Вайсштейн, http://scienceworld.wolfram.com/physics/MomentofInertia.html
| Почему банки для напитков имеют вогнутое дно | Как кошка кувыркается в воздухе | Гироскоп | Нутация |
| теорема о параллельных осях | момент | Магазин физики | крутящий момент |
| Как сделать стол | Прецессия | угловая скорость | осевая прецессия |
| инерция вращения | Инверсная кинематика | Тензор | У меня были лучшие объятия от порывов ветра и мертвых людей |
| Диетическая кола | телическая грамматика | жесткий корпус | Спасти космический телескоп Хаббл |
| Теорема вириала | гироскопическое движение | стандартная ориентация | угловой момент |
Войдите или зарегистрируйтесь, чтобы написать что-нибудь здесь или связаться с авторами.
Видео: Момент инерции | Nagwa
Стенограмма видео
В этом видео мы узнаем про момент инерции. Мы узнаем, что это такое, почему это имеет значение и как его рассчитать. Для начала представьте, что вы проведение гонки под названием «Гонка фигур». На вершине наклонной плоскости, вы поместили полое кольцо, сплошной шар, длинный сплошной цилиндр и полый сферическая оболочка. По сигналу все четыре формы отпускаются одновременно и позволяют начать катиться вниз по склону. Некоторые из этих фигур катятся вниз по склону легче, чем другие. И они вырываются вперед в гонка.
Если вы хотите предсказать заранее
время, какая из фигур выиграет гонку, будет полезно узнать кое-что
про момент инерции. Мы можем начать понимать
понятие момента инерции, поняв, что некоторые линейные переменные имеют
вращательные аналоги и наоборот. Например, рассмотрим линейный
переменная 𝑠, обозначающая расстояние.
В мире вращения переменную, которая соответствует 𝑠, мы можем назвать 𝜃 для углового расстояния. Эти две переменные соответствуют друг друга. Оба они описывают расстояние путешествовал. Это может быть удивительно узнать эта масса также является линейной переменной. Вот что мы подразумеваем под этим. Всякий раз, когда мы рисуем свободное тело диаграмме сил, действующих на массу, мы знаем, что эти силы движутся через центр масс, то есть его центр масс.
Действующие таким образом силы стремятся
переводить, а не вращать нашу массу 𝑚. Итак, масса в ответ на силы
подобные этим или любым другим силам, которые мы можем изобразить, используя диаграмму свободного тела, имеет тенденцию двигаться
в линию. Но сейчас мы представим себе
другой сценарий. Вместо наших сил всегда
возникающие или проходящие через центр масс нашего объекта, мы теперь рассмотрим
сценарии, в которых силы действуют вдоль какой-либо оси, отличной от линии, проходящей через
центр массы. Силы, подобные этим, имеют тенденцию
наша масса вращается. И в зависимости от формы и
распределения нашей массы, это вращение будет более или менее затруднено.
Это понятие стоит за моментом инерция, часто обозначаемая с большой буквы 𝐼. Вместо того, чтобы наши силы двигались через центр масс объекта, что приведет к его линейному перемещению, наши силы теперь действуют за пределами этого центра. Или даже если силы движутся через центр масс, мы могли бы рассматривать движение массы относительно к оси вращения на некотором расстоянии от ее центра.
Мы можем видеть этот момент инерции
всегда приходится иметь дело с вращением. И именно в этом смысле
момент инерции подобен вращающейся массе. Скажем, у нас есть случайно сформированный
массы, под действием силы, которая движется через центр масс объекта. И мы скажем, что эта сила
заставляет массу двигаться по круговой траектории вокруг оси вращения. Учитывая, что у нас есть сила на
массы, движущейся по круговой траектории, по второму закону Ньютона мы можем
напишите линейное выражение этого как 𝐹 равно 𝑚 умноженное на 𝑎.
Интересно, есть ротационный
Вариант второго закона Ньютона. И мы можем найти эту версию по
учитывая, что наша масса находится на расстоянии 𝑟 от центра вращения. А если вектор 𝐹 и вектор
𝑟 перпендикулярны друг другу, мы можем написать, что 𝐹, умноженное на 𝑟, равно
момент инерции, масса вращения помните, умноженная на угловое ускорение
𝛼. Таким образом, не только отдельные переменные
имеют линейные и вращательные пары, но и второй закон Ньютона тоже. Бывают линейные и вращательные.
версия. Это вращательное выражение
Второй закон Ньютона, который дает нам немного лучшее представление о том,
какой момент инерции 𝐼.
Как мы рассматриваем эту связь между массой и моментом инерции может возникнуть вопрос: измерять массу достаточно просто. Пока мы знаем ускорение из-за гравитации мы можем положить тело на весы и таким образом определить его массу. А как же 𝐼? Как насчет момента объекта инерция?
Оказывается, объект
момент инерции 𝐼 можно измерить с помощью простого маятника. Если мы присоединим фигуру, момент которой
инерции мы хотим измерить плечом маятника и позволить ему свободно качаться под
влияние силы тяжести, мы можем видеть, что движение маятника вперед и назад
делает это вращение. Мы можем исследовать, насколько легко или
массе трудно совершить это вращение, изменяя длину
плеча маятника, а также амплитуду, с которой он освобождается.
Пример более распространенных форм из которых мы имеем здесь полый цилиндр, момент инерции этих форм по конкретным осям уже вычислено. И мы можем найти их в стол. В качестве примеров различных форм и соответствующие им моменты инерции, момент инерции точечной массы равен равна массе этой точки, умноженной на квадрат расстояния от нее до ось вращения. С другой стороны, твердая сфера вращаясь вокруг своего центра, имеет момент инерции, равный двум пятым его массы, умноженной на его радиус в квадрате. И твердый стержень, вращающийся вокруг одного конец стержня имеет момент инерции, равный одной трети произведения его массы на длину стержня. стержень квадратный.
Это поднимает важный вопрос
про момент инерции. Мы говорили о том, как момент
инерции 𝐼 и массы подобны друг другу. Момент инерции объекта 𝐼
зависит не только от формы и плотности объекта, как масса, но и 𝐼
зависит от оси вращения. Например, если мы измерим
момент инерции нашего полого цилиндра в этом случае, то это измеренное значение
будет зависеть не только от массы нашего цилиндра, но и от его положения или его
ориентация.
Если мы переместим цилиндр так, чтобы теперь вместо его центра один из его концов прикреплен к плечу маятника или, если мы повернули его так, чтобы он находился на одной линии с маятником, в каждом из этих трех случаев мы вероятно, будет измерять другой момент инерции, та же форма отличается момент. Поэтому, когда мы идем к столу, чтобы посмотреть момент инерции определенной формы, мы должны быть осторожны, чтобы обеспечить что ось вращения нашей формы соответствует нашему сценарию. В противном случае мы запишем неправильный или несоответствующий момент инерции.
Помимо поиска
момент инерции объекта, его тоже можно рассчитать. Чтобы рассмотреть, как мы могли бы это сделать,
давайте снова рассмотрим наш момент инерции точечной массы, т. е. бесконечно
небольшая масса со значением массы 𝑚 на расстоянии 𝑟 от оси вращения. В этих условиях эта точка
момент инерции массы определяется как произведение массы на 𝑟 в квадрате.
А теперь представим, что мы конвертируем
или окружить нашу точечную массу гораздо большей протяженной массой. Точечная масса 𝑚 представляет собой
бесконечно малой составляющей этой большей массы. И можно даже сказать, что это
большая масса просто состоит из бесконечного множества бесконечно малых точек
массы. Если для каждого бесконечно малого
элемент массы, который составляет эту большую массу, мы вычисляем, что элемент массы умножен на
квадрат его расстояния от оси вращения, затем сложение всех этих частей
путем интегрирования мы бы нашли общий момент инерции этого
протяженная масса произвольной формы.
Обычно при расчете интеграл для решения момента инерции объекта, мы выражаем дифференциал элемент массы 𝑑𝑚 через 𝑑𝑟 некоторым образом, в зависимости от формы массы мы хотим решить для. Помимо расчета объекта момент инерции с нуля, есть еще один инструмент момента инерции, который нам понадобится чтобы узнать, прежде чем получить некоторую практику с этими идеями.
Этот инструмент известен как параллельный
теорема об оси. Вот один из способов подумать об этом
теорема. Скажем, что у нас есть твердая сфера
который вращается вокруг оси, проходящей через его центр. Мы видели ранее, что момент
инерция этой формы, вращающейся вокруг своего центра масс, составляет две пятых ее массы, умноженной на
его радиус в квадрате. И мы отметили, что этот результат
зависит от положения оси вращения. Если бы эта ось двигалась, то так
общий момент инерции этой массы.
Допустим, например, что мы переместим нашу ось вращения из центра сферы в какую-то другую точку. И мы скажем, что эта точка отстоит от центра сферы на расстояние 𝑑. Вот что такое параллельная ось теорема говорит нам об этой ситуации. Эта теорема говорит, что если мы переместим наша ось вращения в другое положение, но держите ось параллельно исходной ориентация. Тогда новый момент инерции вращающийся объект равен сумме моментов инерции вращающегося объекта относительно его центра масс плюс его масса, умноженная на квадрат расстояния между исходная и конечная оси вращения.
Это полный рот. Но это означает, что мы можем
использовать момент инерции тела, вращающегося вокруг своего центра
масса при нахождении его момента инерции, вращающегося вокруг какой-либо другой оси. Этот инструмент очень полезен в
решение момента инерции, когда наша ось вращения смещается. И это важно знать, чтобы
использовать его, наши две оси должны быть параллельны друг другу. Зная все это, давайте немного
попрактиковаться с моментом инерции на примере.
Жезл и сфера объединены в образуют систему. Длина стержня 𝐿 равна 0,50 метров. А его масса составляет 2,0 килограмма. Радиус сферы 𝑅 равен 20,0 сантиметры. А его масса составляет 1,0 килограмма. Система может вращаться вокруг точка 𝐴 на противоположном конце стержня к сфере или около точки 𝐵 где стержень и сфера соединяются, как показано на схеме. Найдите момент инерции система о точке 𝐴. Найдите момент инерции система о точке 𝐵.
Мы можем назвать эти два значения 𝐼 sub
𝐴 и 𝐼 под 𝐵. С учетом имеющейся у нас информации
дано, что нам говорят длину стержня, его массу, радиус
сфере и ее массе, мы можем начать вычисление 𝐼 sub 𝐴, выписав этот момент
инерции как суммы компонентов этой системы стержня и
сфера. 𝐼 sub 𝐴 равно моменту
инерция стержня, вращающегося вокруг точки 𝐴, плюс момент инерции сферы
вращается вокруг одной и той же точки.
Когда мы рассмотрим поиск моменты инерции двух частей нашей системы, мы знаем, что сможем найти момент инерции стержня, вращающегося вокруг своего конца, как в этом случае. Но для момента инерции сфере, мы сможем найти это значение для сферы, вращающейся вокруг своего центра. Но в этом случае сфера вращаться не вокруг своего центра, а вокруг точки 𝐴.
Чтобы помочь нам, мы можем вспомнить
теорема о параллельных осях. Эта теорема говорит, что если мы имеем
масса 𝑚 с осью вращения, смещенной на расстояние 𝑑 от центра масс 𝑚,
то общий момент инерции этого объекта равен моменту инерции
объекта относительно его центра масс плюс его масса, умноженная на расстояние 𝑑 в квадрате
между двумя параллельными осями. Это означает, что когда речь идет о
момент инерции сферы, вращающейся вокруг точки 𝐴, этот момент инерции
равен моменту инерции шара относительно его центра масс плюс его
масса, умноженная на расстояние от оси вращения, в нашем случае 𝐿 плюс 𝑅,
в квадрате.
Если мы пойдем и посмотрим в
Из таблицы момент инерции стержня, вращающегося вокруг одного из своих концов, мы видим, что
это одна треть массы стержня, умноженная на длину стержня в квадрате. Более того, когда мы ищем
момента инерции шара, вращающегося вокруг своего центра, видим, что величина равна
к двум пятым массы сферы, умноженной на квадрат ее радиуса. Все это означает, что мы можем переписать
момент инерции нашей системы, вращающейся вокруг точки 𝐴, составляет одну треть
масса стержня, умноженная на его длину в квадрате, плюс две пятых массы шара
умножить на квадрат радиуса плюс, из-за теоремы о параллельных осях, массу
сфера, умноженная на длину стержня плюс радиус сферы. в квадрате.
Так как нам даны значения для все четыре из этих переменных в нашей постановке задачи, мы готовы подключить и решить для 𝐼 под 𝐴. Когда мы подключаемся ко всем этим значений, мы стараемся преобразовать радиус нашей сферы в сантиметры к единицам метров, чтобы согласоваться с единицами в остальной части нашего выражения. Сложив эти три термина вместе, мы находим результат с точностью до двух значащих цифр 0,67 килограмма на метр в квадрате. Это момент инерции эта система вращается вокруг точки 𝐴.
Далее мы хотим рассмотреть то же самое
система, но другая ось вращения. Теперь наша ось вращения находится в
место, где стержень и сфера соединяются. И снова момент инерции
нашей системы равно стержню плюс шару для этого
конкретная ось вращения. Так как стержень, еще раз,
вращаясь вокруг одного из его концов, мы снова можем использовать соотношение для его момента
инерция относительно такой оси. Так же и сфера не
вращается вокруг своего центра масс, момент инерции которого мы знаем, но вращается
вокруг оси на расстоянии ее радиуса 𝑅 от этого центра.
Наше уравнение для 𝐼 sub 𝐵 таким же, как наше уравнение для 𝐼 sub 𝐴, за исключением одного члена. Вместо того, чтобы наше расстояние 𝑑 было 𝐿 плюс 𝑅, теперь это просто 𝑅, радиус нашей сферы. Когда мы подключаемся к этим значениям, снова переводя радиус нашей сферы в единицы метров, мы находим, что 𝐼 sub 𝐵, с точностью до двух значащих цифр, составляет 0,22 килограмма на метр в квадрате. Это момент инерции эта система вращается вокруг оси, проходящей через точку 𝐵.
Подведем итог тому, что мы узнали
про момент инерции. Мы видели, что момент объекта
инерции эквивалентна его вращательной массе. Момент инерции, обозначенный
заглавная 𝐼, зависит от массы объекта, формы и оси, по которой объект вращается
около.