
Вопрос 4 Матрицы и их основные свойства. Действия над ними
Матрица – это математический объект со строками и столбцами содержащий эл-ты (значения)
Сложение матриц обладает следующими свойствами:
А+В=В+А
А+В+С=(А+В)+С
существует единственная (m×n) матрица О, для которой А+О+А
для любой матрицы А существует матрица -А такая, что А+(-А)=О
Матрица О называется
нулевой матрице. Важно
помнить: мы можем складывать матрицы
только одинакового размера (m×n)! Если
матрицы имеют разную размерность, то
складывать их
нельзя!!! Транспонирование Транспонированная
матрица — матрица AT,
полученная из исходной матрицы A заменой
строк на столбцы. Формально,
транспонированная матрица для
матрицы A размеров
—
матрица AT размеров
,
определённая как AT[i, j]
= A[j, i]. Например,
и
Например,
и
Условие обратной матрицы
Итак,
если матрица получилась вырожденной,
то на этом заканчиваем, т. к. решить
обратную матрицу невозможно.
к. решить
обратную матрицу невозможно.
В противном случае, приступим к заполнению обратной матрицы. Для этого надо найти дополнения. Их количество всегда равно числу элементов матрицы. Если матрица третьего порядка, значит у нее 9 элементов, у каждого свое дополнение и все эти дополнения надо искать.
Покажу на примере схемы, как найти дополнение элемента, стоящего в первой строке второго столбца, значит элементы, стоящие в первой строке и втором столбце надо вычеркнуть. Оставшиеся элементы (их 4) – записываем в новый определитель, умноженный на (-1) в степени (1+2), где 1 и 2 -номера строки и столбца.
После нахождения всех дополнений составляем обратную матрицу, она представляет собой транспонированную матрицу к той, которая составлена из полученных дополнений, деленная на определитель исходной матрицы. Вот почему важно, чтобы матрица была невырожденной (на нуль ведь делить нельзя).
Рассмотрим на примере нахождение обратной матрицы:
Пусть дана матрица В:
Найдем ее определитель:
Определитель
равен 232, это не ноль, значит матрица
невырожденная и для нее можно найти
обратную матрицу.
Для этого найдем 9 дополнений:
Дополнение для элемента, стоящего в первой строке первого столбца:
Дополнение для элемента, стоящего в первой строке второго столбца:
Дополнение для элемента, стоящего в первой строке третьего столбца:
Теперь определим следующие три дополнения для второй строки:
И последние три для третьей строки:
Теперь составим обратную матрицу:
Вычитание (А-В=А+(-1)В)
вычитание матриц – одно из простейших действий над ними, т.к. необходимо отнять соответствующие элементы двух матриц. Главное помнить, что вычитать можно только матрицы одинаковых размеров, т.е. тех, у которых одинаковое количество строк и одинаковое количество столбцов.
Например, пусть даны две матрицы равного размера 2х3, т.е. с двумя строками и тремя столбцами:
Разность двух матриц:
Свойства сложения матриц и умножения матрицы на число:
Операции сложения матриц и умножения матрицы на число обладают следующими свойствами:
1. А + В = В + А;
А + В = В + А;
2. А + (В + С) = (А + В) + С;
3. А + 0 = А;
4. А – А = 0;
5. 1 × А = А;
6. α × (А + В) = αА + αВ;
7. (α + β) × А = αА + βА;
8. α × (βА) = (αβ) × А;
, где А, В и С – матрицы, α и β – числа.
Умножение
матриц обладает
следующими свойствами: 1.
А × (В × С) = (А × В) × С;
2.
А × (В + С) = АВ + АС;
3.
(А + В) × С = АС + ВС;
4.
α × (АВ) = (αА) × В;
5.
А × 0 = 0; 0 × А = 0;
6.
(АВ)Т =
ВТАТ;
7.
(АВС)Т =
СТВТАТ;
8.
(А + В)Т =
АТ +
В
Вопрос 5. Ранг матрицы – наивысший порядок отличных от нуля ее миноров (строк). Обозначение: rank A. Базисный минор матрицы – любой отличный от нуля минор порядка r = rank A. Пример:
Делим первую строку на 3.
Теперь
вычитаем из второго и третьего столбца
первый с коэффициентами 2/3 и 1/3
соответственно.
Вычитаем из второй и третьей строки первую с коэффициентами 2 и 1 соответственно.
и т.д. В итоге получим матрицу:
Следовательно
ранг матрицы равен 3. Вопрос
6
для любых двух обратимых матриц A и B.
где * T обозначает транспонированную матрицу.
для любого коэффициента .
Если
необходимо решить систему
линейных уравнений Ax = b, (b —
ненулевой вектор) где x — искомый
вектор, и если A −
1 существует,
то x = A − 1b.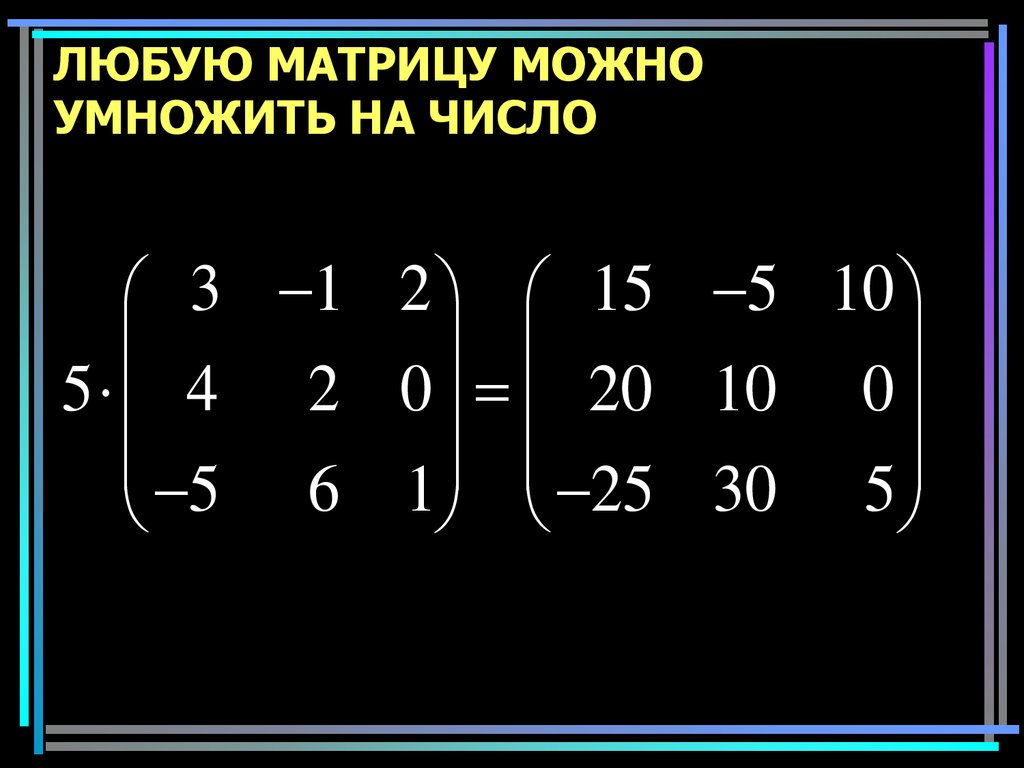 В противном случае
либо размерность пространства решений
больше нуля, либо их нет вовсе.
В противном случае
либо размерность пространства решений
больше нуля, либо их нет вовсе.
Вопрос 7 Коллинеарные и компланарные векторы. КОЛЛИНЕАРНОСТЬ Необходимым и достаточным условием коллинеарности ненулевого вектора и вектора является существование такого числа , которое удовлетворяет равенству . Условие коллинеарности двух векторов и:
.
КОМПЛАНАРНОСТЬ
Необходимое и достаточное условие компланарности векторов
a = ( x, y, z ), b = ( u, v, w ) и c = ( p, q, r ) :
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I. МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ § 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4. Расстояние между двумя точками на прямой § 2. КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве § 3. УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ 2. Полярные координаты 3.  Зависимость между декартовыми и полярными координатами Зависимость между декартовыми и полярными координатами§ 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. График функции 4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам 2. Поворот осей координат ГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. ПРЯМАЯ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4. Общее уравнение прямой и его частные случаи 5. Точка пересечения прямых. Построение прямой по ее уравнению 6. Вычисление угла между двумя прямыми. Условия параллельности и перпендикулярности двух прямых 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. Пучок прямых 9.  Уравнение прямой, проходящей через две данные точки Уравнение прямой, проходящей через две данные точки10. Расстояние от точки до прямой § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. Окружность 3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 7. Упрощение уравнения кривой второго порядка. График квадратного трехчлена 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 9. График дробно-линейной функции 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ § 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3. Понятие об определителях высших порядков § 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 3. Система трех уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3.  ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5. Разложение вектора на составляющие по осям координат 6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 13. Смешанное произведение трех векторов 14. Геометрический смысл смешанного произведения 15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2. Равенство матриц. Действия над матрицами 3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 3. Приведение квадратичной формы к каноническому виду 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV.  АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ§ 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. Уравнение плоскости, проходящей через данную точку 3. Общее уравнение плоскости и его частные случаи 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5. Уравнения прямой, проходящей через две точки 6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3. Прямая и плоскость в пространстве 2. Точка пересечения прямой с плоскостью 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V.  ТЕОРИЯ ПРЕДЕЛОВ ТЕОРИЯ ПРЕДЕЛОВ§ 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. Предел функции при х->х0 4. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. Понятие об обратной функции 5. Обратные тригонометрические функции 6. Показательная и логарифмическая функции 7. Понятие о гиперболических функциях ГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 4.  Определение производной и ее механический смысл Определение производной и ее механический смысл5. Дифференцируемость функции 6. Геометрический смысл производной 7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. Графическое дифференцирование § 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2. Механический смысл второй производной § 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6.  Дифференциалы высших порядков Дифференциалы высших порядков§ 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. Дифференцирование функций, заданных параметрически § 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ 2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4. Отыскание наибольшего и наименьшего значений функции 5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8. 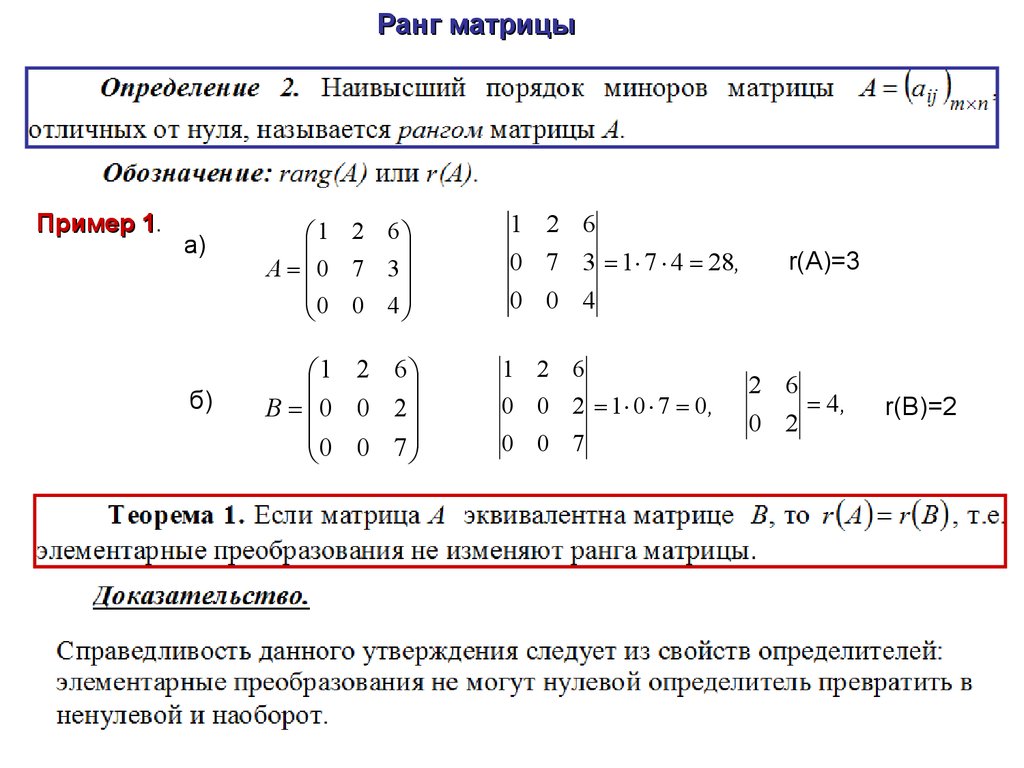 ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ2. Уточнение найденных значений корней методом хорд и касательных § 9. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Рациональные дроби. Выделение правильной рациональной дроби 3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5. Метод неопределенных коэффициентов 6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3.  Интегралы видов Интегралы видов4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. Понятие об интегралах, не берущихся в элементарных функциях ГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6. Интегрирование по частям в определенном интеграле § 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. Вычисление объема тела по известным поперечным сечениям 4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2.  Вычисление кривизны Вычисление кривизны3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. Интегралы от разрывных функций 3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2. Предел функции нескольких переменных. Непрерывность функции. Точки разрыва 2. Непрерывность функции нескольких переменных 3. Понятие области 4. Точки разрыва 5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2.  Полный дифференциал функции Полный дифференциал функции3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. Инвариантность формы полного дифференциала 3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X. КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ § 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4. Вычисление двойного интеграла в декартовых координатах 5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5. 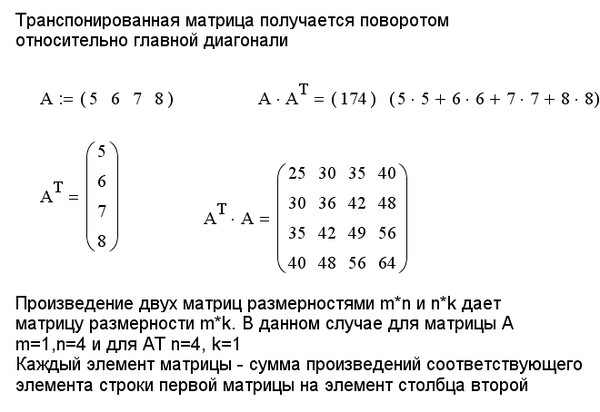 Приложения тройного интеграла Приложения тройного интеграла§ 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. Вычисление криволинейного интеграла 4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. Достаточные признаки сходимости знакоположительных рядов 6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2. ФУНКЦИОНАЛЬНЫЕ РЯДЫ 2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2. 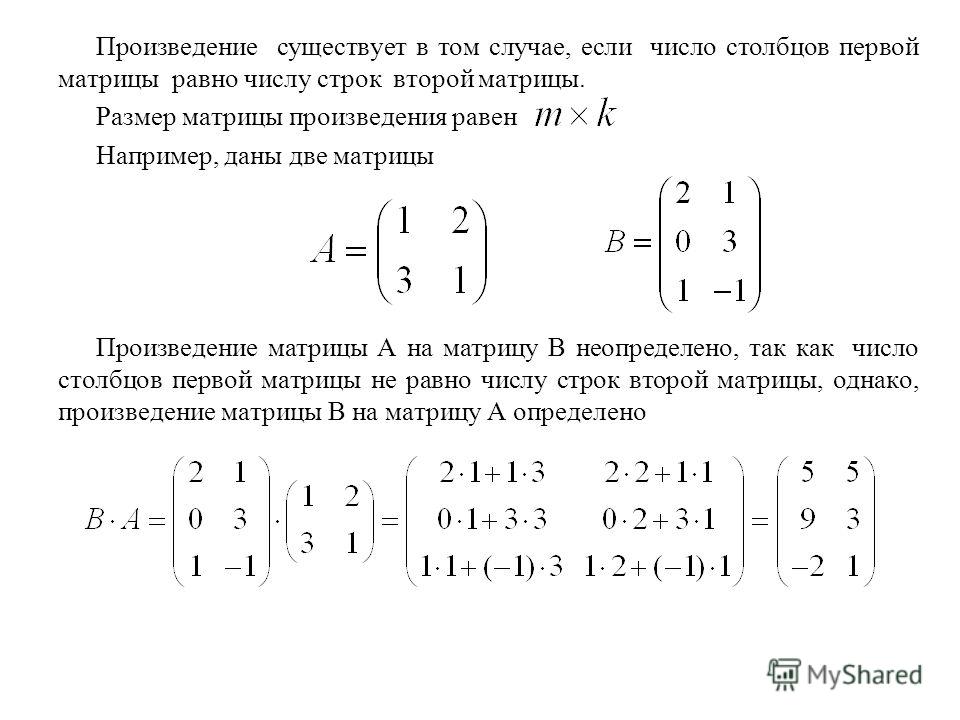 Приближенное вычисление интегралов Приближенное вычисление интегралов§ 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2. Числовые ряды с комплексными членами 3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. Уравнения с разделяющимися переменными 4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7. Особые решения 8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2.  Линейные однородные дифференциальные уравнения второго порядка Линейные однородные дифференциальные уравнения второго порядка3. Линейные неоднородные дифференциальные уравнения второго порядка 4. Метод вариации произвольных постоянных § 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами § 6. ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ § 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
 640 с.
640 с.
произведений матриц | Колледж Алгебра
Результаты обучения
- Умножение матрицы на скаляр, суммирование скалярных множителей матриц.

- Перемножить две матрицы вместе.
- Используйте калькулятор для выполнения операций с матрицами.
Помимо сложения и вычитания целых матриц, во многих ситуациях нам нужно умножить матрицу на константу, называемую скаляром. Напомним, что скаляр — это действительная числовая величина, которая имеет величину, но не направление. Например, время, температура и расстояние являются скалярными величинами. Процесс скалярное умножение включает умножение каждой записи в матрице на скаляр. Скалярное число , кратное , — это любой элемент матрицы, полученный в результате скалярного умножения.
Рассмотрим реальный сценарий, в котором университету необходимо добавить к своему инвентарю компьютеры, компьютерные столы и стулья в двух лабораториях кампуса в связи с увеличением числа учащихся. По их оценкам, в обеих лабораториях требуется на 15% больше оборудования. Текущий инвентарь школы отображается в таблице ниже.
| Лаборатория А | Лаборатория Б | |
|---|---|---|
| Компьютеры | 15 | 27 |
| Компьютерные столы | 16 | 34 |
| Стулья | 16 | 34 |
Преобразовав данные в матрицу, мы имеем
[латекс]{C}_{2013}=\left[\begin{array}{c}15\\ 16\\ 16\end{array}\ begin{array}{c}27\\ 34\\ 34\end{array}\right][/latex]
Чтобы рассчитать, сколько потребуется компьютерного оборудования, мы умножаем все записи в матрице [latex]C[/latex] на 0,15.
[латекс]\влево(0,15\вправо){C}_{2013}=\влево[\begin{массив}{c}\влево(0,15\вправо)15\\ \влево(0,15\вправо)16\ \\left(0.15\right)16\end{массив}\begin{массив}{c}\left(0.15\right)27\\ \left(0.15\right)34\\ \left(0.15\right)34 \end{массив}\right]=\left[\begin{массив}{c}2.25\\ 2.4\\ 2.4\end{массив}\begin{массив}{c}4. 05\\ 5.1\\ 5.1\end{ array}\right][/latex]
05\\ 5.1\\ 5.1\end{ array}\right][/latex]
Мы должны округлить до следующего целого числа, поэтому количество необходимого нового оборудования равно
[латекс]\влево[\begin{array}{c}3\\ 3\\ 3\end{массив}\begin{массив}{c}5\\ 6\\ 6\end{массив}\right ][/latex]
Сложив две матрицы, как показано ниже, мы увидим новые суммы запасов.
[латекс]\влево[\begin{массив}{c}15\\ 16\\ 16\конец{массив}\begin{массив}{c}27\\ 34\\ 34\конец{массив}\вправо ]+\left[\begin{array}{c}3\\ 3\\ 3\end{array}\begin{array}{c}5\\ 6\\ 6\end{array}\right]=\ left[\begin{array}{c}18\\ 19\\ 19\end{array}\begin{array}{c}32\\ 40\\ 40\end{array}\right][/latex]
Это означает
[латекс]{C}_{2014}=\left[\begin{array}{c}18\\ 19\\ 19\end{array}\begin{array}{c}32\\ 40\\ 40\end{array}\right][/latex]
Таким образом, в лаборатории А будет 18 компьютеров, 19 компьютерных столов и 19 стульев; В лаборатории B будет 32 компьютера, 40 компьютерных столов и 40 стульев.
A Общее примечание: Скалярное умножение
Скалярное умножение включает в себя нахождение произведения константы по каждому элементу матрицы. Учитывая
Учитывая
[латекс]A=\left[\begin{array}{cccc}{a}_{11}& & & {a}_{12}\\ {a}_{21}& & & {a }_{22}\end{массив}\right][/latex]
скалярное кратное [латекс]cA[/латекс] равно
[латекс]\begin{array}{ll}cA & =c\left[\begin{array}{ccc}{a}_{11}& & {a}_{12}\\ {a}_{21}& & {a}_{22}\end{массив}\right]\hfill \\ & =\left[\begin{массив}{ccc }c{a}_{11}& & c{a}_{12}\\ c{a}_{21}& & c{a}_{22}\end{массив}\right]\hfill \ end{array}[/latex]
Скалярное умножение является дистрибутивным. Для матриц [latex]A,B[/latex] и [latex]C[/latex] со скалярами [latex]a[/latex] и [latex]b[/latex],
[латекс]\begin{array}{l}\\ \begin{array}{c}a\left(A+B\right)=aA+aB\\ \left(a+b\right)A= aA+bA\end{массив}\end{массив}[/latex]
Пример: умножение матрицы на скаляр
Умножение матрицы [latex]A[/latex] на скаляр 3.
[latex]A =\left[\begin{array}{cc}8& 1\\ 5& 4\end{array}\right][/latex]
Показать решение
Попробуйте
По заданной матрице [латекс]B,\текст{}[/латекс] найдите [латекс]-2В[/латекс], где
[латекс]В=\left[\begin{array}{cc} 4& 1\\ 3& 2\end{массив}\right][/latex]
Показать раствор
Пример: нахождение суммы скалярных кратных
Найдите сумму [латекс]3А+2В[/латекс].
[латекс]A=\left[\begin{array}{rrr}\hfill 1& \hfill -2& \hfill 0\\ \hfill 0& \hfill -1& \hfill 2\\ \hfill 4& \hfill 3& \hfill -6\end{массив}\right]\text{ и }B=\left[\begin{array}{rrr}\hfill -1& \hfill 2& \hfill 1\\ \hfill 0& \hfill -3& \hfill 2 \\ \hfill 0& \hfill 1& \hfill -4\end{массив}\right][/latex]
Показать решение
Попробуйте
Нахождение произведения двух матриц
Помимо умножения матрицы на скаляр, мы можем умножать две матрицы. Нахождение произведения двух матриц возможно только в том случае, если внутренние размерности совпадают, что означает, что количество столбцов первой матрицы равно количеству строк второй матрицы. Если [latex]A[/latex] является матрицей [latex]\text{ }m\text{ }\times \text{ }r\text{ }[/latex], а [latex]B[/latex] является [latex]\text{ }r\text{ }\times \text{ }n\text{ }[/latex] матрица, то матрица произведения [latex]AB[/latex] является [latex]\text{ } m\text{ }\times \text{ }n\text{ }[/latex] матрица. Например, продукт [latex]AB[/latex] возможен, потому что количество столбцов в [latex]A[/latex] совпадает с количеством строк в [latex]B[/latex]. Если внутренние размеры не совпадают, товар не определяется.
Например, продукт [latex]AB[/latex] возможен, потому что количество столбцов в [latex]A[/latex] совпадает с количеством строк в [latex]B[/latex]. Если внутренние размеры не совпадают, товар не определяется.
Мы умножаем записи [latex]A[/latex] на записи [latex]B[/latex] в соответствии с определенным шаблоном, как показано ниже. Процесс умножения матрицы на становится понятнее при решении задачи с вещественными числами.
Чтобы получить элементы в строке [latex]i[/latex] массива [latex]AB,\text{}[/latex], мы умножаем элементы в ряду [latex]i[/latex] массива [latex]A[ /latex] по столбцу [latex]j[/latex] в [latex]B[/latex] и добавить. Например, даны матрицы [латекс]А[/латекс] и [латекс]В,\текст{}[/латекс], где размеры [латекс]А[/латекс] равны [латекс]2\текст{ }\times \text{ }3[/latex] и размеры [latex]B[/latex] равны [latex]3\text{ }\times \text{ }3,\text{}[/latex] произведению [ latex]AB[/latex] будет матрицей [latex]2\text{ }\times \text{ }3[/latex].
[латекс]A=\left[\begin{array}{rrr}\hfill {a}_{11}& \hfill {a}_{12}& \hfill {a}_{13}\\ \ hfill {a}_{21}& \hfill {a}_{22}& \hfill {a}_{23}\end{массив}\right]\text{ и }B=\left[\begin{массив }{rrr}\hfill {b}_{11}& \hfill {b}_{12}& \hfill {b}_{13}\\ \hfill {b}_{21}& \hfill {b} _{22}& \hfill {b}_{23}\\ \hfill {b}_{31}& \hfill {b}_{32}& \hfill {b}_{33}\end{массив} \right][/latex]
Умножьте и сложите следующим образом, чтобы получить первую запись матрицы произведений [latex]AB[/latex].
- Чтобы получить запись в строке 1, столбце 1 [latex]AB,\text{}[/latex] умножьте первую строку в [latex]A[/latex] на первый столбец в [latex]B[ /латекс] и добавить.
[латекс]\влево[\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\end{массив}\right]\cdot \left [\begin{массив}{c}{b}_{11}\\ {b}_{21}\\ {b}_{31}\end{массив}\right]={a}_{11} \cdot {b}_{11}+{a}_{12}\cdot {b}_{21}+{a}_{13}\cdot {b}_{31}[/latex]
- Чтобы получить запись в строке 1, столбце 2 [latex]AB,\text{}[/latex] умножьте первую строку [latex]A[/latex] на вторую колонку в [latex]B[/latex]. ] и добавить.
[латекс]\влево[\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\end{массив}\right]\cdot \left [\begin{массив}{c}{b}_{12}\\ {b}_{22}\\ {b}_{32}\end{массив}\right]={a}_{11} \cdot {b}_{12}+{a}_{12}\cdot {b}_{22}+{a}_{13}\cdot {b}_{32}[/latex]
- Чтобы получить запись в строке 1, столбце 3 в [latex]AB,\text{}[/latex] умножьте первую строку [latex]A[/latex] на третий столбец в [latex]B[/latex].
 ] и добавить.
] и добавить.[латекс]\влево[\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\end{массив}\right]\cdot \left [\begin{массив}{c}{b}_{13}\\ {b}_{23}\\ {b}_{33}\end{массив}\right]={a}_{11} \cdot {b}_{13}+{a}_{12}\cdot {b}_{23}+{a}_{13}\cdot {b}_{33}[/latex]
Таким же образом получаем вторую строку [latex]AB[/latex]. Другими словами, строка 2 таблицы [latex]A[/latex] умножается на столбец 1 таблицы [latex]B[/latex]; 2-я строка [latex]A[/latex] умножается на 2-й столбец [latex]B[/latex]; строка 2 из [latex]A[/latex] умножается на столбец 3 из [latex]B[/latex]. По завершении матрица продуктов будет
[латекс]AB=\left[\begin{array}{c}\begin{array}{l}{a}_{11}\cdot {b}_{11} +{a}_{12}\cdot {b}_{21}+{a}_{13}\cdot {b}_{31}\\ \end{массив}\\ {a}_{21} \cdot {b}_{11}+{a}_{22}\cdot {b}_{21}+{a}_{23}\cdot {b}_{31}\end{массив}\begin {массив}{c}\begin{массив}{l}{a}_{11}\cdot {b}_{12}+{a}_{12}\cdot {b}_{22}+{a }_{13}\cdot {b}_{32}\\ \end{массив}\\ {a}_{21}\cdot {b}_{12}+{a}_{22}\cdot { b}_{22}+{a}_{23}\cdot {b}_{32}\end{массив}\begin{массив}{c}\begin{массив}{l}{a}_{11 }\cdot {b}_{13}+{a}_{12}\cdot {b}_{23}+{a}_{13}\cdot {b}_{33}\\ \end{массив }\\ {a}_{21}\cdot {b}_{13}+{a}_{22}\cdot {b}_{23}+{a}_{23}\cdot {b}_ {33}\end{массив}\right][/latex]
A Общее примечание: свойства умножения матриц
Для матриц [latex]A,B,\text{}[/latex] и [latex]C[/latex] выполняются следующие свойства.
- Умножение матриц ассоциативно:
[латекс]\влево(AB\вправо)C=A\влево(BC\вправо)[/латекс]
- Умножение матриц распределительное:
[латекс]\begin{массив}{l}\begin{массив}{l}\\ C\left(A+B\right)=CA+CB,\end{массив}\hfill \\ \left(A +B\right)C=AC+BC.\hfill \end{массив}[/latex]
Обратите внимание, что умножение матриц не является коммутативным.
Пример: перемножение двух матриц
Умножьте матрицу [латекс]А[/латекс] и матрицу [латекс]В[/латекс].
[латекс]A=\left[\begin{array}{cc}1& 2\\ 3& 4\end{array}\right]\text{ и }B=\left[\begin{array}{cc} 5& 6\\ 7& 8\end{массив}\right][/latex]
Показать решение
Пример: умножение двух матриц
Даны [латекс]А[/латекс] и [латекс]В:[/латекс]
- Найти [латекс]AB[/латекс].
- Найти [латекс]БА[/латекс].
[латекс]A=\left[\begin{array}{l}\begin{array}{ccc}-1& 2& 3\end{array}\hfill \\ \begin{array}{ccc}4& 0& 5 \end{массив}\hfill \end{массив}\right]\text{ и }B=\left[\begin{массив}{c}5\\ -4\\ 2\end{массив}\begin{массив }{c}-1\\ 0\\ 3\end{массив}\right][/latex]
Показать решение
Вопросы и ответы
Можно ли определить AB, но не BA?
Да, рассмотрим матрицу A размерностью [латекс]3\умножить на 4[/латекс] и матрицу В размерностью [латекс]4\умножить на 2[/латекс]. Для продукта AB внутренние размеры равны 4, и продукт определен, но для продукта BA внутренние размеры равны 2 и 3, поэтому продукт не определен.
Для продукта AB внутренние размеры равны 4, и продукт определен, но для продукта BA внутренние размеры равны 2 и 3, поэтому продукт не определен.
Пример: использование матриц в реальных задачах
Вернемся к задаче, представленной в начале этого раздела. У нас есть таблица ниже, представляющая потребности в оборудовании двух футбольных команд.
| Дикие кошки | Грязевые коты | |
|---|---|---|
| Цели | 6 | 10 |
| Шарики | 30 | 24 |
| Трикотажные изделия | 14 | 20 |
Нам также предоставлены цены на оборудование, как показано в таблице ниже.
| Цель | $300 |
| Мяч | 10 долларов |
| Джерси | $30 |
Преобразуем данные в матрицы. Таким образом, матрица потребности в оборудовании записывается как
Таким образом, матрица потребности в оборудовании записывается как
[латекс]E=\left[\begin{array}{c}6\\ 30\\ 14\end{array}\begin{array}{c}10\\ 24\\ 20\end{array}\ right][/latex]
Матрица стоимости записывается как
[latex]C=\left[\begin{array}{ccc}300& 10& 30\end{array}\right][/latex]
Мы выполняем умножение матриц для получения стоимости оборудования.
[латекс]\begin{array}{l}\hfill \\ \hfill \\ CE & =\left[\begin{array}{rrr}\hfill 300& \hfill 10& \hfill 30\end{массив}\right ]\cdot \left[\begin{array}{rr}\hfill 6& \hfill 10\\ \hfill 30& \hfill 24\\ \hfill 14& \hfill 20\end{массив}\right]\hfill \\ & = \left[\begin{array}{rr}\hfill 300\left(6\right)+10\left(30\right)+30\left(14\right)& \hfill 300\left(10\right) +10\влево(24\вправо)+30\влево(20\вправо)\конец{массив}\вправо]\hfill \\ & =\влево[\begin{массив}{rr}\hfill 2520& \hfill 3840 \end{массив}\right]\hfill \end{массив}[/latex]
Общая стоимость оборудования для Wildcats составляет 2520 долларов США, а общая стоимость оборудования для Mudcats составляет 3840 долларов США.
Практическое руководство. Вычисление матричной операции с помощью калькулятора
- Сохранение каждой матрицы как матричной переменной
[латекс]\влево[A\вправо],\влево[B\вправо],\влево[C\вправо],..[/латекс]
- Введите операцию в калькулятор, вызывая каждую переменную матрицы по мере необходимости.
- Если операция определена, калькулятор представит матрицу решения; если операция не определена, будет отображаться сообщение об ошибке.
Пример: использование калькулятора для выполнения операций с матрицами \hfill 32\\ \hfill 41& \hfill -7& \hfill -28\\ \hfill 10& \hfill 34& \hfill -2\end{массив}\right],B=\left[\begin{array}{rrr} \hfill 45& \hfill 21& \hfill -37\\ \hfill -24& \hfill 52& \hfill 19\\ \hfill 6& \hfill -48& \hfill -31\end{массив}\right],\text{and}C =\left[\begin{массив}{rrr}\hfill -100& \hfill -89& \hfill -98\\ \hfill 25& \hfill -56& \hfill 74\\ \hfill -67& \hfill 42& \hfill -75\end{массив}\right][/latex].

Показать раствор
Поддержите!
У вас есть идеи по улучшению этого контента? Мы будем признательны за ваш вклад.
Улучшить эту страницуПодробнее
матрицы – Матричное представление комплексного числа – это просто трюк?
Задать вопрос
спросил
Изменено 4 года, 4 месяца назад
Просмотрено 3к раз
$\begingroup$
Этот вопрос является продолжением моего вопроса о стеке, хотя вопрос не зависит от знания того, что это был за вопрос, я думаю, что он добавляет к контексту того, откуда я пришел.
Во-первых, как я уже сказал в ссылке, я изначально был сбит с толку тем, что у нас есть два разных способа представления комплексного числа в матричной форме.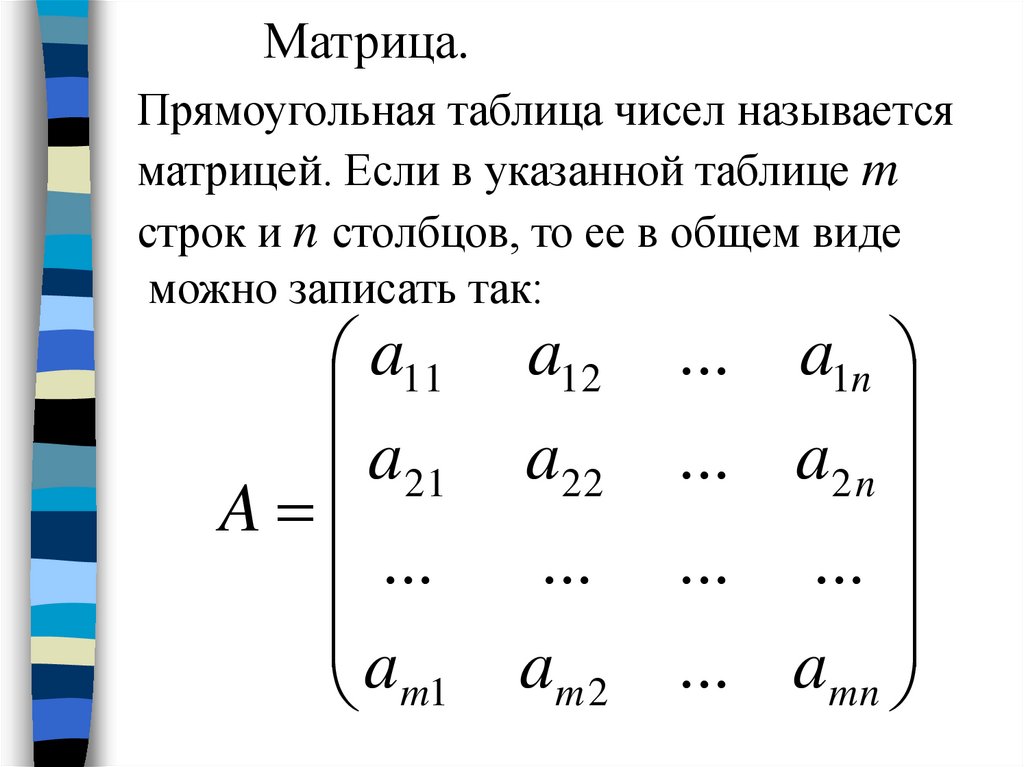 И я пришел к выводу, что технически эти два определения не должны использоваться в одной и той же системе или уравнении для представления комплексного числа. Я могу ошибаться, говоря это, и если я ошибаюсь, я был бы признателен за любой аргумент в пользу этой идеи.
И я пришел к выводу, что технически эти два определения не должны использоваться в одной и той же системе или уравнении для представления комплексного числа. Я могу ошибаться, говоря это, и если я ошибаюсь, я был бы признателен за любой аргумент в пользу этой идеи.
Пожалуйста, переходите к заключению, если хотите читать меньше
Демонстрация проблемы наличия двух определений
Определение матричной формы $2 \times 2$ $a+bi=\begin{bmatrix}a&-b\\ b&a\end{bmatrix}$
и
Матрица $1 \times 2$ (векторная форма)определение $a+bi=\begin{bmatrix}a\\ b\end{bmatrix}$
Очевидно, что это не одно и то же. Как они могут представлять одно и то же? Я провел небольшое исследование на примере $i \times i = -1$
case 1
$\begin{bmatrix}0&-1\\ 1&0\end{bmatrix}\cdot \begin{bmatrix}0&-1\\ 1&0\end{bmatrix}=\begin{bmatrix}-1&0\\ 0& -1\конец{bmatrix}$
Я выполнил линейное преобразование матрицы, где на выходе также была матрица, которая может представлять как линейное преобразование, так и комплексное число.
также интересно отметить, что коммутативное свойство (умножение/линейное преобразование) комплексного числа сохраняется, как и должно быть.
случай 2
$\begin{bmatrix}0&-1\\ 1&0\end{bmatrix}\cdot \begin{bmatrix}0\\1\end{bmatrix}=\begin{bmatrix}-1\\0\ конец{bmatrix}$
На этот раз я выполнил линейное преобразование вектора, и на выходе также был вектор, представляющий комплексное число.
Этот метод работает, поскольку «свойство вращения» комплексного числа закодировано в линейном преобразовании
случай 3
$\begin{bmatrix}0\\1\end{bmatrix}\cdot \begin{bmatrix}0\\ 1\end{bmatrix}=\begin{bmatrix}0\\0\end{bmatrix}$?
Это линейное преобразование ерунда. Я думаю, это потому, что «свойство вращения» закодировано в базисном векторе вектора [1,i]. Поэтому для кодирования этого свойства имеет смысл добавить базисные векторы.
$\begin{bmatrix}0\\1\end{bmatrix}\cdot \begin{bmatrix}0\\1\end{bmatrix}=i\times i=-1$.
случай 4
$\begin{bmatrix}0\\1 \end{bmatrix} \cdot \begin{bmatrix} 0&-1 \\ 1&0 \end{bmatrix} = \begin{bmatrix} 0&0 \\ 0&-1 \end{bmatrix}$?
Это тоже бессмысленное линейное преобразование.
Интересно, можно сделать хак и превратить матрицу в вектор.
$\begin{bmatrix}0\\1 \end{bmatrix} \cdot \begin{bmatrix} 0&-1 \\ 1&0 \end{bmatrix}\cdot\begin{bmatrix}1\\0 \end{bmatrix} = \begin{bmatrix} 0&0 \\ 0&-1 \end{bmatrix}$
$=\begin{bmatrix}0\\1 \end{bmatrix}\cdot \begin{bmatrix}0\\1 \end{bmatrix}$
$=i\times i = -1$
Но это мило мошенничества, поскольку мы просто преобразуем матрицу в вектор.
Заключение
Матричное представление кодирует идею вращения, а также сохраняет аддивинность и коммутативность. По определению базисный вектор для этой матрицы может быть любым.
Векторное представление не кодирует саму идею вращения, но кодирует ее базисный вектор (его базисный вектор должен быть мнимым и действительным).
Вывод матричного представления требует допущения $i=\begin{bmatrix}0\\1\end{bmatrix}$ и $1=\begin{bmatrix}1\\0\end{bmatrix}$.
Из-за этого я не думаю, что матричное представление следует определять как сложное представление, но это инструмент, который кодирует свойство вращения и аддитивности. Поэтому его можно использовать для поворота (умножения) векторного представления. Поэтому
$ i \cdot i $ и $\begin{bmatrix}0&-1\\ 1&0\end{bmatrix}\cdot \begin{bmatrix}0\\1\end{bmatrix}$
может быть эквивалентной операцией. Я не думаю, что они должны быть одинаковыми. Это не что иное, как уловка, которая дает тот же результат.
Очевидно, что матричное представление и векторное представление не должны определяться как i в одной и той же системе при выполнении простого сложения
Итак, если $ i \cdot i \equiv \begin{bmatrix}0&-1\\ 1&0\end {bmatrix}\cdot \begin{bmatrix}0\\1\end{bmatrix}$ тогда наверняка
$ i + i \equiv \begin{bmatrix}0&-1\\ 1&0\end{bmatrix} + \begin{bmatrix }0\\1\end{bmatrix}$ Что неверно
Если вывод матричной формы требует определения векторной формы, Конечно, матричная форма не может определять себя как одно и то же. Кроме того, действительно ли имеет смысл определять комплексное число как линейное преобразование? По этим причинам определение матрицы кажется мне уловкой, и мне кажется, что технически оно должно быть определено как.
$a+bi = \begin{bmatrix}a&-b\\ b&a\end{bmatrix} \cdot \begin{bmatrix}1\\ 0\end{bmatrix}$
И трюк с линейным преобразованием должен быть явно определен как трюк, а не как само комплексное число
$(a+bi)\times (c+di) = \begin{bmatrix}a&-b\\ b&a\end{bmatrix} \cdot \begin{bmatrix}c\\d\end{bmatrix}$
Like мудро, трюк с аддитивностью следует рассматривать как трюк, а не рассматривать матрицу как само комплексное число.
- матрицы
- комплексные числа
- линейные преобразования
$\endgroup$
1
$\begingroup$
Это не уловка.
Зафиксируем $z=a+bi \in \mathbb C$ и рассмотрим отображение $\mu : w \mapsto zw$.
Рассматривая $\mathbb C$ как векторное пространство над $\mathbb R$, матрица $\mu$ относительно базиса $1,i$ в точности равна $$\begin{bmatrix}a&-b\\ b&a\end{bmatrix}$$
Отображение $z \mapsto \mu$ является инъективным гомоморфизмом $\mathbb R$-алгебр $\mathbb C \to \ text{End}_\mathbb R(\mathbb C) \cong M_2(\mathbb R)$.
Та же конструкция работает для любого конечного расширения полей $E/F$: кольцо матриц $M_n(F)$ содержит копии всех расширений $F$ степени $n$.
В частности, например, $\mathbb Q(\sqrt 2)$ можно дать матричную интерпретацию в $M_2(\mathbb Q)$. Попробуй это!
$\endgroup$
2
$\begingroup$
Они оба «представляют комплексные числа», но в разном контексте или одним и тем же способом.
$\begin{bmatrix}a \\ b \end{bmatrix}$ представляет $a+bi$, если рассматривать его как элемент векторного пространства, базис которого равен $\begin{bmatrix}1 \\ 0 \end {bmatrix} \sim 1$ и $\begin{bmatrix}0 \\ 1 \end{bmatrix} \sim i$. Это представление $a+bi$ не включает возможность умножения комплексных чисел, так как в векторных пространствах нет операции «умножения» (не считая внутреннего произведения, что вам здесь в любом случае не нужно).
Другое представление действительно отражает мультипликативные свойства комплексных чисел, но оно существует в пространстве всех матриц размера $2\times 2$. В это пространство входят элементы, не представляющие комплексные (или действительные) числа, так что это представление тоже какое-то неточное.
Вы говорите, что мы не должны использовать оба представления одновременно; это правильно. Это потому, что либо мы думаем о пространстве матриц $2\times 2$, либо мы думаем о двумерном векторном пространстве над $\Bbb{R}$, но это две разные вещи, поэтому мы не будем использовать элементы одного, когда мы думаем о другом.
$\endgroup$
4
$\begingroup$
Когда вы думаете о комплексном числе $z$, вы думаете о вращении плоскости или о точке на плоскости? (В этом посте я буду рассматривать только комплексные числа, которые представляют собой повороты, но на самом деле это повороты + масштабирование плоскости). Если у вас есть опыт работы с комплексными числами, вы знаете, что обе эти интерпретации верны.
Если рассматривать комплексные числа $z, w$ как вращения плоскости, их произведение $zw$ равно повороту на $w$, за которым следует поворот на $z$. Если мы сейчас напишем $$ M(a + ib) = \begin{pmatrix}a & -b \\ b & a\end{pmatrix}$$ тогда матрица $M(z)$ — это в точности вещественная матрица $2 \times 2$, кодирующая тот же поворот, что и $z$. Произведение матриц $M(z) M(w)$ представляет собой поворот на $w$, за которым следует поворот на $z$, что равно $M(zw)$. Таким образом, тот факт, что умножение $M(z)$ и $M(w)$ работает правильно, заключается в том, что $M(z)$ правильно кодирует линейный оператор, представляющий собой вращение на $z$, и композиция линейных операторов согласуется с умножением комплексных чисел.
Если рассматривать комплексные числа как точки на плоскости, число $w = a + ib$ помещается в точку $(a, b)$. Мы могли бы записать это как
$$ V(a + ib) = \begin{pmatrix} a \\ b \end{pmatrix} $$
Думая о комплексных числах $z, w$ как о точках на плоскости, как найти произведение $zw$? Ответ таков: на самом деле это не так, вместо этого вы думаете о $z$ как о вращении, а затем применяете это вращение к точке $w$, чтобы получить новую точку $zw$.