
Скорость, Вектор скорости и траектория, Сложение скоростей
Скорость
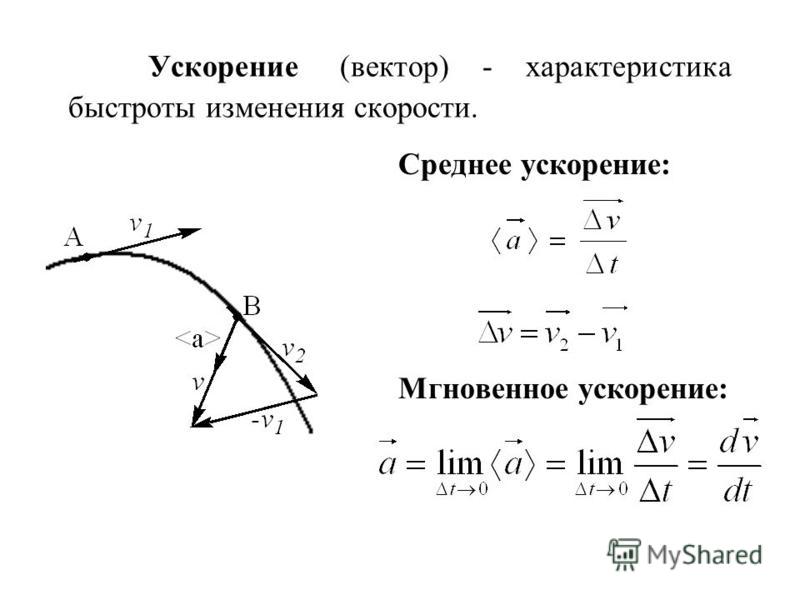
Средняя скорость частицы характеризует быстроту ее движения за конечный промежуток времени. Неограниченно уменьшая этот промежуток, мы придем к физической величине, характеризующей быстроту движения в данный момент времени. Такая величина называется мгновенной скоростью или просто скоростью:
обозначает математическую операцию перехода к пределу. Под этим символом записывается условие, при котором выполняется данный предельный переход; в рассматриваемом случае это стремление к нулю промежутка времени. При вычислении скорости по этому правилу мы убедимся, что уменьшение промежутка времени приводит к тому, что на некотором этапе получаемые очередные значения средней скорости будут все меньше и меньше отличаться друг от друга. Поэтому на практике при нахождении скорости можно остановиться на конечном значении, достаточно малом для получения требуемой точности значения скорости.
Вектор скорости и траектория.
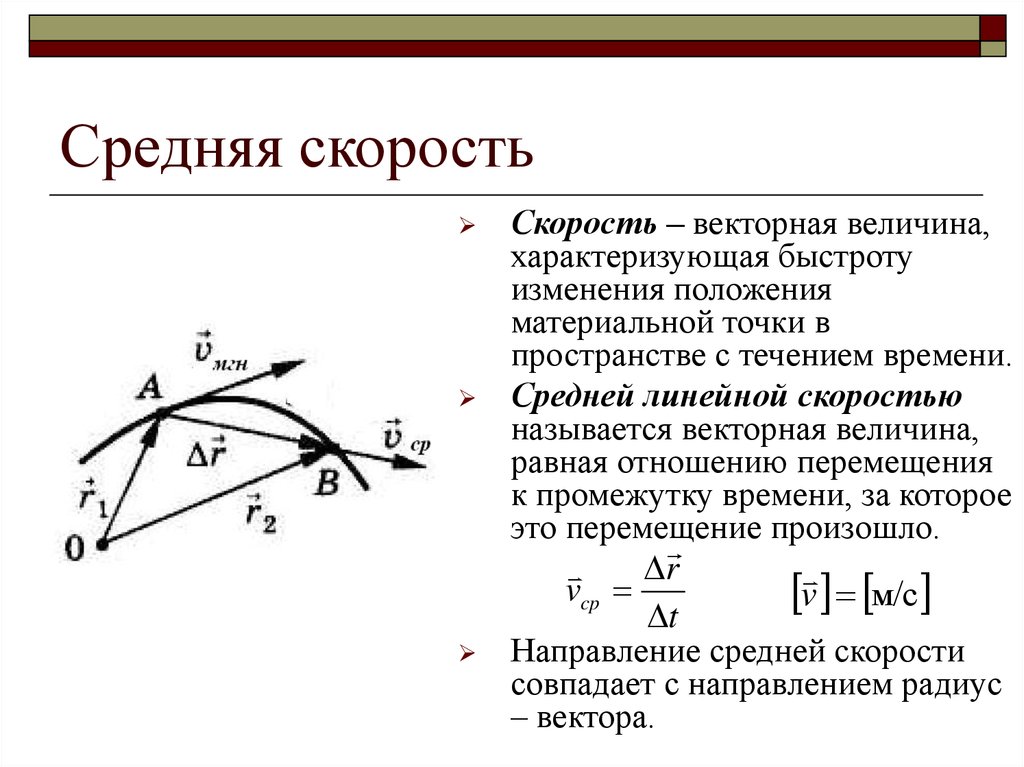
Рассматриваемый предельный переход имеет ясный геометрический смысл. Поскольку вектор перемещения направлен по хорде, соединяющей две точки траектории, то при сближении этих точек, происходящем при, он принимает положение, соответствующее касательной к траектории в данной точке. Это значит, что вектор скорости направлен по касательной к траектории. Так будет в любой точке траектории (рис. 14). При прямолинейной траектории движения вектор скорости направлен вдоль этой прямой.
Скорость прохождения пути.
Аналогичным переходом определяется мгновенная скорость прохождения пути:
Для плавной кривой, каковой является траектория любого непрерывного механического движения, длина дуги тем меньше отличается от длины стягивающей ее хорды, чем короче эта дуга. В пределе эти длины совпадают. Поэтому при можно считать, что . Это означает, что скорость прохождения пути равна модулю мгновенной скорости .
Сложение скоростей.
Если тело одновременно участвует в нескольких движениях, то его скорость равна векторной сумме скоростей каждого из этих движений. Это непосредственно следует из правила сложения перемещений: так как , то после деления на получаем
Иногда бывает удобно представить некоторое сложное движение как суперпозицию, т. е. наложение двух простых движений. В этом случае равенство (3) можно трактовать как правило разложения вектора скорости на составляющие.
По этой ссылке вы найдёте полный курс лекций по математике:
| Решение задач по математике |
Задачи.
1.
Переправа через реку. Скорость течения в реке с параллельными берегами всюду одинакова и равна. Ширина реки (рис. 15). Катер может плыть со скоростью относительно воды. На какое расстояние s снесет катер вниз по течению реки, если при переправе нос катера направить строго поперек берегов?
Решение.
Катер участвует одновременно в двух движениях: со скоростью , направленной поперек течения, и вместе с водой со скоростью которая направлена параллельно берегу. В соответствии с правилом сложения скоростей полная скорость катера относительно берегов равна векторной сумме (рис. 16). Очевидно, что движение катера происходит по прямой, направленной вдоль вектора. Искомое расстояние s, на которое снесет катер при переправе, можно найти из подобия треугольника, образованному векторами скоростей:
Эту задачу легко решить и не прибегая к сложению векторов скоростей.
Очевидно, что расстояние s равно произведению скорости течения на время в течение которого катер пересекает реку.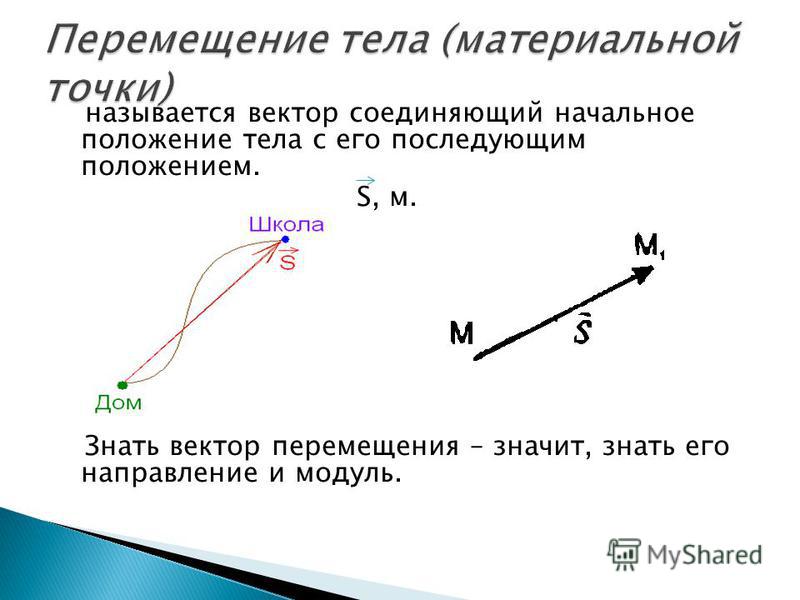 Это время можно найти, разделив ширину реки на скорость движения катера поперек реки. Таким образом, находим Рис. 16. Сложение скоростей при переправе через .В этой простой задаче второй способ решения предпочтительнее, так как он проще. Однако уже при небольшом усложнении условия задачи становятся отчетливо видны преимущества первого способа, основанного на сложении векторов скоростей.
Это время можно найти, разделив ширину реки на скорость движения катера поперек реки. Таким образом, находим Рис. 16. Сложение скоростей при переправе через .В этой простой задаче второй способ решения предпочтительнее, так как он проще. Однако уже при небольшом усложнении условия задачи становятся отчетливо видны преимущества первого способа, основанного на сложении векторов скоростей.
2. Переправа поперек реки. Предположим, что теперь нам нужно переправиться на катере через ту же реку точно поперек, т. е. попасть в точку В, лежащую напротив начальной точки А (рис. 17). Как нужно направить нос катера при переправе? Сколько времени займет такая переправа?Решение. В рассматриваемом случае полная скорость v катера относительно берегов, равная векторной сумме скоростей должна быть направлена поперек реки.
Из рис. 17 сразу видно, что вектор, вдоль которого и смотрит нос катера, должен отклоняться на некоторый угол а вверх по течению реки от направления . Синус этого угла равен отношению модулей скоростей течения и катера относительно воды.
Возможно вам будут полезны данные страницы:
| Проекция вектора на заданное направление. Скалярное произведение векторов |
| Генератор на транзисторе. Автоколебания |
| Аналогия между механическими и электромагнитными колебаниями |
| Некоторые дифференциальные уравнения, встречающиеся в механике |
3. Снос при быстром течении.
Предположим теперь, что скорость катера относительно воды меньше скорости течения: В таком случае переправа без сноса невозможна. Как следует направить нос катера при переправе, чтобы снос получился минимальным? На какое расстояние этом снесет катер? Решение. Полная скорость относительно берегов во всех рассматриваемых случаях дается формулой. Однако теперь нагляднее выполнить сложение векторов и по правилу треугольника (рис. 18) первым изображаем век гор для которого мы знаем модуль направление, а затем к его концу пристраиваем начало вектора известен только модуль, направление еще предстоит выбрать. Этот выбор нужно сделать так, вектор результирующей скорости как можно меньше отклонялся от направления поперек реки.
Как следует направить нос катера при переправе, чтобы снос получился минимальным? На какое расстояние этом снесет катер? Решение. Полная скорость относительно берегов во всех рассматриваемых случаях дается формулой. Однако теперь нагляднее выполнить сложение векторов и по правилу треугольника (рис. 18) первым изображаем век гор для которого мы знаем модуль направление, а затем к его концу пристраиваем начало вектора известен только модуль, направление еще предстоит выбрать. Этот выбор нужно сделать так, вектор результирующей скорости как можно меньше отклонялся от направления поперек реки.
Рис. 19. Определение курса (направление вектора) переправы минимальным сносом 18. Сложение скоростей переправе Конец любом направлении должен лежать на окружности радиуса центр которой совпадает концом вектора. Эта окружность показана Так условию задачи то точка соответствующая началу лежит вне этой окружности.
| Из рисунка видно, что образует прямой |
наименьший угол тогда, когда он направлен касательной Следовательно, перпендикулярен вектору треугольник прямоугольный. Таким образом, направлять вверх течению под углом линии Синус этого угла дастся выражением Траектория направлена вдоль вектора, т.е. она перпендикулярна направлению, в котором смотрит катера. Это значит, своей траектории катер движется боком. другом берегу реки причалит точке, до найти из подобия треугольников. Модуль находится теореме Пифагора. результате получаем
Таким образом, направлять вверх течению под углом линии Синус этого угла дастся выражением Траектория направлена вдоль вектора, т.е. она перпендикулярна направлению, в котором смотрит катера. Это значит, своей траектории катер движется боком. другом берегу реки причалит точке, до найти из подобия треугольников. Модуль находится теореме Пифагора. результате получаем
4. Лодка тросе. Лодку подтягивают за привязанный носу трос, наматывая равномерно вращающийся барабан Барабан установлен высоком берегу. какой скоростью лодка тот момент, трос горизонтом? Трос выбирается барабаном скоростью.
Решение.
Точка троса, где он привязан к лодке, движется с той же скоростью, что и лодка. Эта скорость v направлена горизонтально. Чтобы связать ее со скоростью выбирания троса, нужно сообразить, что движение троса сводится к повороту вокруг точки В, где он касается барабана, и скольжению вдоль собственного направления, т. е. прямой . Поэтому естественно разложить скорость точки на две составляющие , направленные вдоль и поперек троса (рис.
По мере приближения лодки к берегу угол а становится больше. Это значит, что cos а убывает и искомая скорость возрастает. Задача для самостоятельного решения Человек находится в поле на расстоянии от прямолинейного участка шоссе. Слева от себя он замечает движущийся по шоссе автомобиль. В каком направлении следует бежать к шоссе, чтобы выбежать на дорогу впереди автомобиля и как можно дальше от него? Скорость автомобиля и, скорость человека.
• Объясните, почему вектор скорости всегда направлен по касательной к траектории.
• В некоторых случаях траектория движения частицы может иметь изломы. Приведите примеры таких движений. Что можно сказать о направлении скорости в точках, где траектория имеет излом?
• В случае непрерывного механического движения вектор скорости не испытывает скачков ни по модулю, ни по направлению. Появление скачков скорости всегда связано с некоторой идеализацией реального процесса. Какие идеализации присутствовали в приведенных вами примерах траекторий с изломами?
Появление скачков скорости всегда связано с некоторой идеализацией реального процесса. Какие идеализации присутствовали в приведенных вами примерах траекторий с изломами?
• Найдите ошибку в приводимом ниже решении задачи 4. Разложим скорость , точки троса на вертикальную и горизонтальную составляющие (рис. 22). Горизонтальная составляющая это и есть искомая скорость лодки. Поэтому и (неверно!).
Скорость как производная.
Вернемся к выражению (1) для мгновенной скорости. При движении частицы ее радиус-вектор г изменяется, т. е. является некоторой функцией времени:. Перемещение Дг за промежуток времени At представляет собой разность радиусов-векторов в моменты времени. Поэтому формулу (1) можно переписать в виде В математике такую величину называют производной от функции по времени Для нее используют следующие обозначения. Последнее обозначение (точка над буквой) характерно именно для производной по времени. Отметим, что в данном случае производная представляет собой вектор, так как получается в результате дифференцирования векторной функции по скалярному аргументу. Для модуля мгновенной скорости в соответствии справедливо выражение в начале статьи.
Для модуля мгновенной скорости в соответствии справедливо выражение в начале статьи.
Модуль приращения вектора скорости
Основываясь на определении скорости, мы можем утверждать, что скорость является вектором. Она непосредственно выражается через вектор-перемещения, отнесенный к промежутку времени, и должна обладать всеми свойствами вектора перемещения.
Направление вектора скорости, так же как направление физически малого вектора перемещения, определяется по чертежу траектории. В этом можно наглядно убедиться на простых примерах.
Если к вращающемуся точильному камню прикоснуться железной пластинкой, то снимаемые им опилки приобретут скорость тех точек камня, к которым прикасалась пластинка, и затем улетят в направлении вектора этой скорости. Все точки камня движутся по окружностям. Во время опыта хорошо видно, что отрывающиеся раскаленные частички-опилки уходят по касательным к этим окружностям, указывая направления векторов скоростей отдельных точек вращающегося точильного камня.
Обратите внимание на то, как расположены выходные трубы у кожуха центробежного водяного насоса или у сепаратора для молока. В этих машинах частицы жидкости заставляют двигаться по окружностям и затем дают им возможность выйти в отверстие, расположенное в направлении вектора той скорости, которую они имеют в момент выхода. Направление вектора скорости в этот момент совпадает с направлением касательной к траектории движения частиц жидкости. И выходная труба тоже направлена по этой касательной.
Точно так же обеспечивают выход частиц в современных ускорителях электронов и протонов при ядерных исследованиях.
Итак, мы убедились, что направление вектора скорости определяется по траектории движения тела. Вектор скорости всегда направлен вдоль касательной к траектории в той точке, через которую проходит движущееся тело.
Для того чтобы определить, в какую сторону вдоль касательной направлен вектор скорости и каков его модуль, нужно обратиться к закону движения. Допустим, что закон движения задан графиком, показанным на рис. 1.54. Возьмем приращение длины пути соответствующее малому вектору по которому определяется вектор скорости. Вспомним, что Знак указывает
1.54. Возьмем приращение длины пути соответствующее малому вектору по которому определяется вектор скорости. Вспомним, что Знак указывает
направление движения по траектории, а следовательно, определяет ориентировку вектора скорости вдоль касательной. Очевидно, что через модуль этого приращения длины пути будет определяться модуль скорости.
Таким образом, модуль вектора скорости и ориентировку вектора скорости вдоль касательной к траектории можно определить из соотношения
Здесь является алгебраической величиной, знак которой указывает, в какую сторону по касательной к траектории направлен вектор скорости.
Итак, мы убедились, что модуль вектора скорости может быть найден по графику закона движения. Отношение определяет угол наклона а касательной на этом графике. Наклон касательной на графике закона движения будет тем больше, чем больше т. е. чем больше в выбранный момент скорость движения.
Еще раз обратим внимание на то, что для полного определения скорости требуется одновременное знание траектории и закона движения.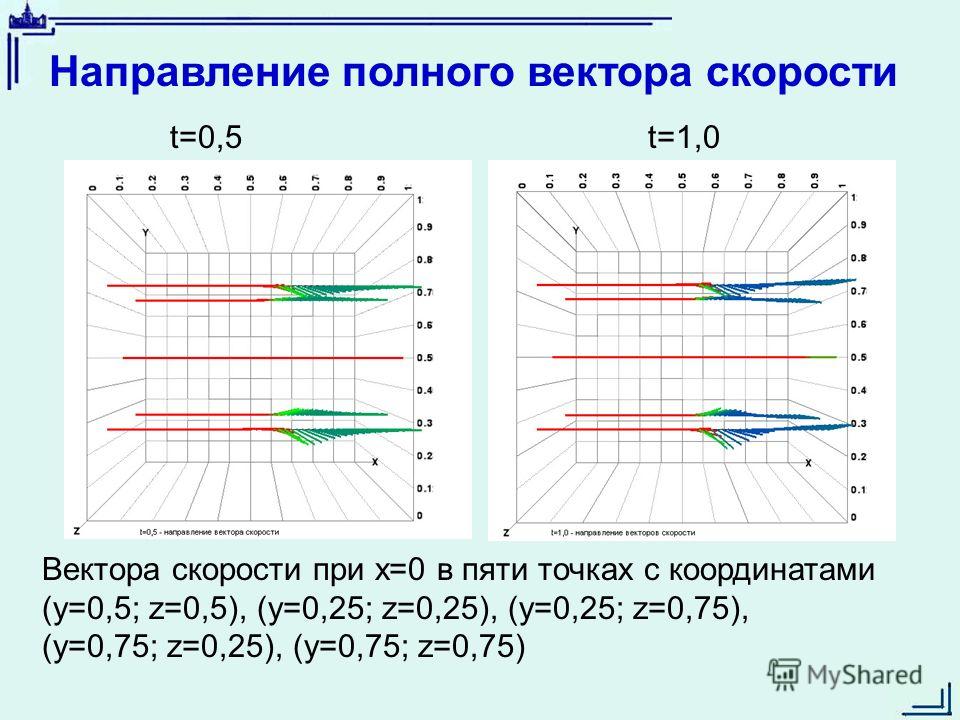 Чертеж траектории позволяет определить направление скорости, а график закона движения — ее модуль и знак.
Чертеж траектории позволяет определить направление скорости, а график закона движения — ее модуль и знак.
Если теперь мы обратимся снова к определению механического движения, то убедимся в том, что после введения понятия скорости для полного описания любого движения больше ничего не требуется. Используя понятия радиус-вектора, вектора перемещения, вектора скорости, длины пути, траектории и закона движения, можно получить ответы на все вопросы, связанные с определением особенностей любого движения. Все эти понятия взаимосвязаны друг с другом, причем знание траектории и закона движения позволяет найти любую из этих величин.
Иродов И.Е. Механика. (Скачать)
Фриш Том 1. Механика. (Скачать)
Сивухин Д.В. Курс общей физики. Механика.
Савельев И.В. Курс ОБЩЕЙ физики. Механика.
Яворский Б.М., Детлаф А.А. Курс общей физики. Справочник по физике.
Механика.
Механика — наука о движении и равновесии тел.
Материальная точка – это тело, размеры и форма которого в условиях данной задачи несущественны.
Абсолютно твёрдое тело – это система материальных точек, расстояния между которыми не меняются в процессе движения.
Механическое движение – это изменение положения тела в пространстве с течением времени.
- Виды механического движения:
- Поступательное.
- Вращение вокруг неподвижной оси.
- Вращение вокруг неподвижной точки.
- Плоское движение.
- Свободное движение.
Поступательное – это такое движение твёрдого тела, при котором любая прямая, связанная с телом, всё время остаётся параллельной своему начальному положению.
Плоское – это такое движение твёрдого тела, при котором каждая его точка движется в плоскости, параллельной некоторой неподвижной (в данной системе отсчёта) плоскости.
Описание механического движения.
Тело отсчёта — это тело, относительно которого задаётся положение данного тела или данной точки.
Система отсчёта — совокупность тела отсчёта, связанной с ним системы координат, и синхронизованных между собой часов.
Получите бесплатный курс по основам математики. Эти знания необходимы для решения задач по физике.
Векторная алгебра с нуля!
Получите бесплатный курс по Векторной алгебре. Он необходим для решения задач по физике.
Книги по изучению физики и для подготовки к ЕГЭ
Векторы. Задачи. Равен ли модуль приращения вектора приращению модуля вектора
Задача 6. Равен ли модуль приращения вектора приращению модуля вектора? Показать, что
r · dr = r · dr.
Запутанно? Ничего, сейчас разберемся. Пусть дан изменяющийся со временем вектор r. С течением времени он изменился на Δ r, то есть Δ r – это приращение вектора r и тоже является вектором. Его модуль равен | Δ r |. Еще раз, | Δ r | – это модуль приращения вектора r. Далее, вектор r кроме направления, характеризуется еще и модулем. Модуль вектора r равен r. При изменении вектора может изменяться и его модуль. Изменение (приращение) модуля вектора r равно Δ r.
Далее, вектор r кроме направления, характеризуется еще и модулем. Модуль вектора r равен r. При изменении вектора может изменяться и его модуль. Изменение (приращение) модуля вектора r равно Δ r.
Так вот, равен ли модуль приращения вектора | Δ r | приращению модуля вектора Δ r?
Оказывается, что в общем случае | Δ r | ≠ Δ r. Представим себе, что вектор r вращается против хода часовой стрелки по окружности, центром которой является начало вектора (рис. 22). При этом величина вектора не меняется (его модуль является радиусом окружности), то есть
r = const, следовательно, изменение модуля вектора равно нулю (Δ r = 0). В то же время, при определенном положении вектора (на рисунке этому положению соответствует вектор r1) его изменение не равно нулю, то есть Δ r ≠ 0.
Следовательно, и | Δ r | ≠ 0.
Однако в некоторых частных случаях возможна ситуация, когда | Δ r | = Δ r. Например, в рассмотренном примере, вектор r при вращении занимает то же положение, в котором он был в начальный момент времени. В этом случае изменения вектора не произошло, то есть Δr = 0. Тогда | Δ r | = Δ r = 0. Рассмотрим еще пример.
Вектор b изменился по величине и стал вектором b1. Изменения направления вектора не произошло (смотри рис. 23). В этом случае | Δ b | = Δ b.
И еще. Пусть дан вектор а. Определим приращение, модуль приращения вектора и приращение модуля этого вектора при изменении его направления на противоположное (рис. 24).
Чтобы найти приращение вектора надо из его конечного значения вычесть начальное. Начальное значение вектора равно а, конечное его значение равно − а. Тогда изменение вектора Δа = (− а) − а = − 2а. Модуль изменения вектора, очевидно, равен 2а, то есть | Δа | = 2а.
Тогда изменение вектора Δа = (− а) − а = − 2а. Модуль изменения вектора, очевидно, равен 2а, то есть | Δа | = 2а.
Найдем изменение модуля вектора: Δа = | − а| − | а | = а – а = 0. Этого и следовало ожидать, ведь изменилось только направление вектора, а модуль остался прежним, его изменения не произошло.
А теперь покажем, что скалярное произведение вектора на его бесконечно малое изменение равно произведению модуля вектора на бесконечно малое изменение этого модуля.
Имеем вектор r, его бесконечно малое изменение будет dr. Найдем скалярное произведение этих двух векторов.
r · dr = r · dr · Cos α, где r – модуль вектора r, dr – модуль вектора dr, α – угол между направлениями векторов r и dr.
Присмотримся внимательнее к произведению dr · Cos α. Из рис. 25 видно, что
Из рис. 25 видно, что
dr · Cos α = АВ. Но при бесконечно малом изменении вектора r АВ практически равно АС. Величина же АС есть ни что иное, как изменение длины вектора r.
Как обозначают бесконечно малое изменение модуля вектора? Ее обозначают тоже dr. Вот так! И модуль бесконечно малого изменения вектора обозначают dr, и бесконечно малое изменение модуля вектора r тоже обозначают dr! Ничего не поделаешь: так уж сложилось в литературе. Что нужно для того, чтобы не запутаться? Во-первых, знать векторную алгебру. Во-вторых, просто быть внимательным при работе с формулами. Кстати, добросовестные авторы всегда указывают, что в той или иной формуле следует понимать под dr.
Итак, dr · Cos α = dr. Здесь, dr в левой части формулы – это модуль бесконечно малого вектора перемещеня, то есть dr = | dr |. А вот dr в правой части формулы – это бесконечно малое изменение модуля вектора r, то есть dr = d | r |.
Итак, мы показали, что r · dr = r · dr. К конечному изменению вектора r эта формула не применима. То есть, в общем случае r · Δ r не равно
r · Δ r. Как видно из рисунка в этом случае АВ и АС могут сильно различаться,
и dr · Cos α не будет равно dr.
Пожалуйста, не забудьте поделиться о прочитанном со своими друзьями в соц. сетях (см. кнопки ниже).
© Коллекция подготовительных материалов для успешной сдачи ЕГЭ по физике от Н. Чернова 2012 – 2015 | Контакты: , +79212839427, (81554) 65780
Вектор скорости, модуль вектора скорости, вектор ускорения, модуль вектора ускорения.
Вектор скорости, модуль вектора скорости, вектор ускорения, модуль вектора ускорения.
|
Кинематика точки
Вектор скорости, модуль вектора скорости, вектор ускорения, модуль вектора ускорения.
– проекция вектора скорости на координатную ось X может быть найдена как производная координаты x по времени t;
– выражение модуля скорости через проекции вектора скорости на координатные оси;
– вектор скорости по определению – это производная радиус-вектора по времени;
– выражение модуля радиус-вектора материальной точки через ее координаты;
– выражение модуля ускорения через проекции вектора ускорения на координатные оси;
– проекция вектора ускорения на координатную ось X может быть найдена как производная проекции скорости на эту ось по времени t.
1.1. Материальная точка движется вдоль координатной оси X по закону . Вычислите проекцию скорости материальной точки на ось X для момента t = 1 с.
1.2. Материальная точка движется со скоростью . Вычислите модуль скорости материальной точки для момента времени t = 2,67 с.
1.3. Радиус-вектор материальной точки зависит от времени по закону . Найдите зависимости вектора и модуля вектора скорости от времени.
1.5. Закон движения материальной точки дан уравнениями
Вычислите величину скорости материальной точки в позиции x = y = 0.
1.6. Закон движения материальной точки дан уравнениями
Здесь b, c и k положительные постоянные. Найдите величину скорости материальной точки как функцию времени.
1.8. Координаты x и y материальной точки зависят от времени по законам
x = A×cos wt
y = B×sin wt,
где A, B, w – постоянные величины. Найдите величину скорости материальной точки в момент wt = p/4.
1.11. Материальная точка движется вдоль координатной оси X по закону . Через сколько t времени после момента t = 0 с вектор ускорения материальной точки изменит направление на противоположное?
Через сколько t времени после момента t = 0 с вектор ускорения материальной точки изменит направление на противоположное?
1.12. Координаты x и y материальной точки зависят от времени по законам
где R, w – положительные постоянные величины. Найдите величину ускорения материальной точки.
1.13. Материальная точка движется со скоростью . Вычислите модуль ускорения материальной точки.
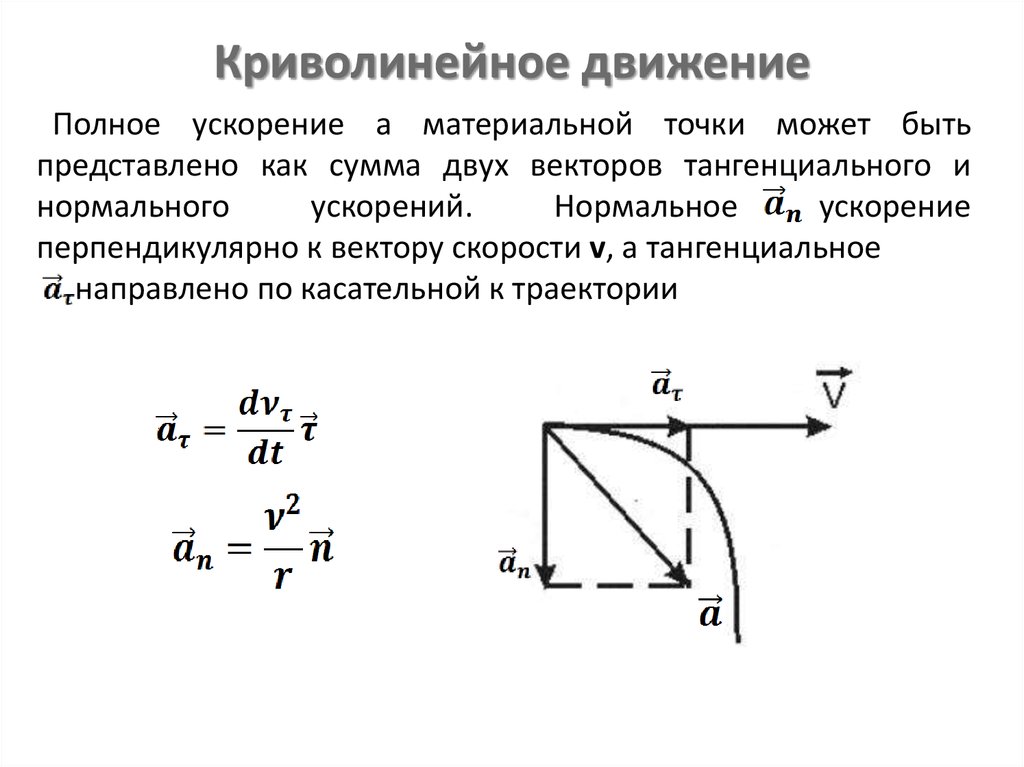
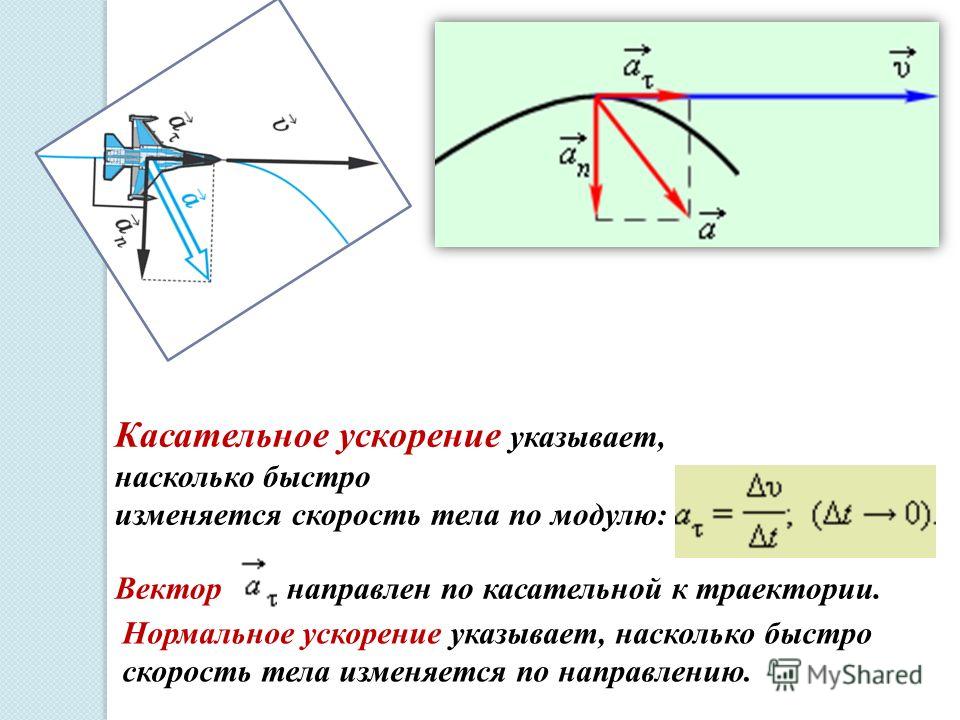
Тангенциальное ускорение.
– тангенциальное (касательное) ускорение – это производная от модуля скорости по времени. Оно показывает, как быстро изменяется величина (модуль) скорости со временем. Для нахождения тангенциального ускорения сначала находим модуль скорости как функцию времени и затем дифференцируем эту функцию по времени.
1.36. Для экономии места, въезд на один из высочайших в Японии мостов устроен в виде винтовой линии, обвивающей цилиндр радиуса R.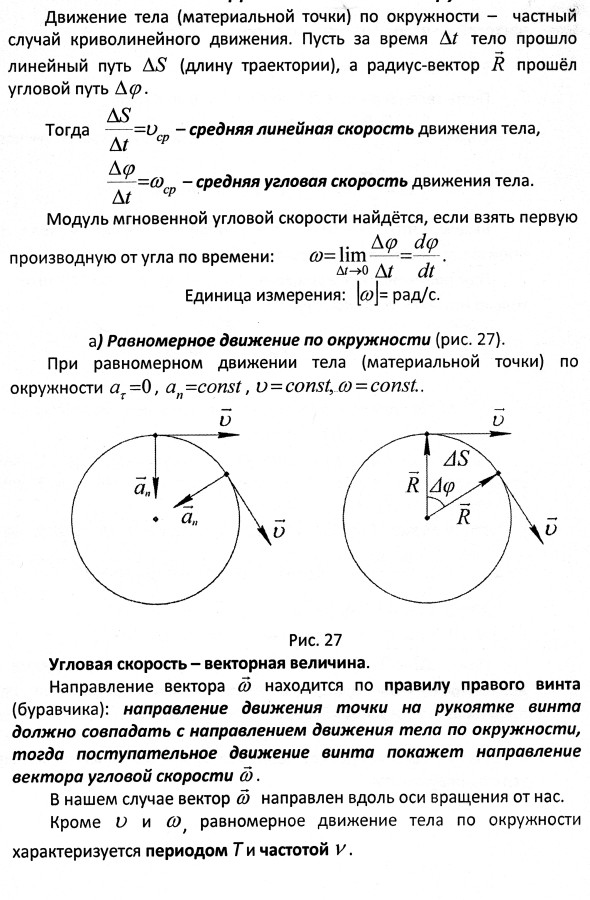 Полотно дороги составляет угол α с горизонтальной плоскостью. Найдите тангенциальное ускорение автомобиля, движущегося с постоянной по модулю скоростью.
Полотно дороги составляет угол α с горизонтальной плоскостью. Найдите тангенциальное ускорение автомобиля, движущегося с постоянной по модулю скоростью.
1.37. Точка движется в плоскости так, что проекции ее скорости на оси прямоугольной системы координат равны . Вычислите величину тангенциального ускорения точки, соответствующую моменту времени t = 1/p с после старта.
1.39. Небольшое тело бросили горизонтально со скоростью = 3 м/с в поле сил тяжести (g = 10 м/с2). Вычислите величину тангенциального ускорения тела, соответствующую моменту времени t = 0,4 с после старта.
1.40. Закон движения материальной точки дан уравнениями
Здесь b, c и k положительные постоянные. Найдите зависимость величины тангенциального ускорения от времени.
Нормальное ускорение.
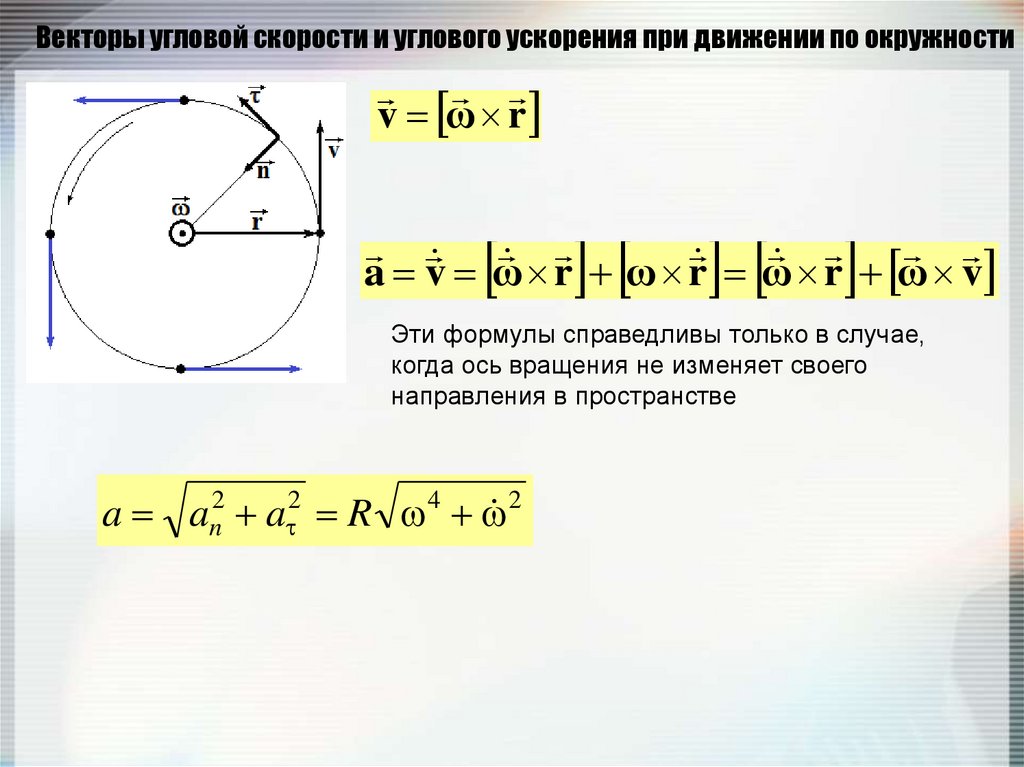
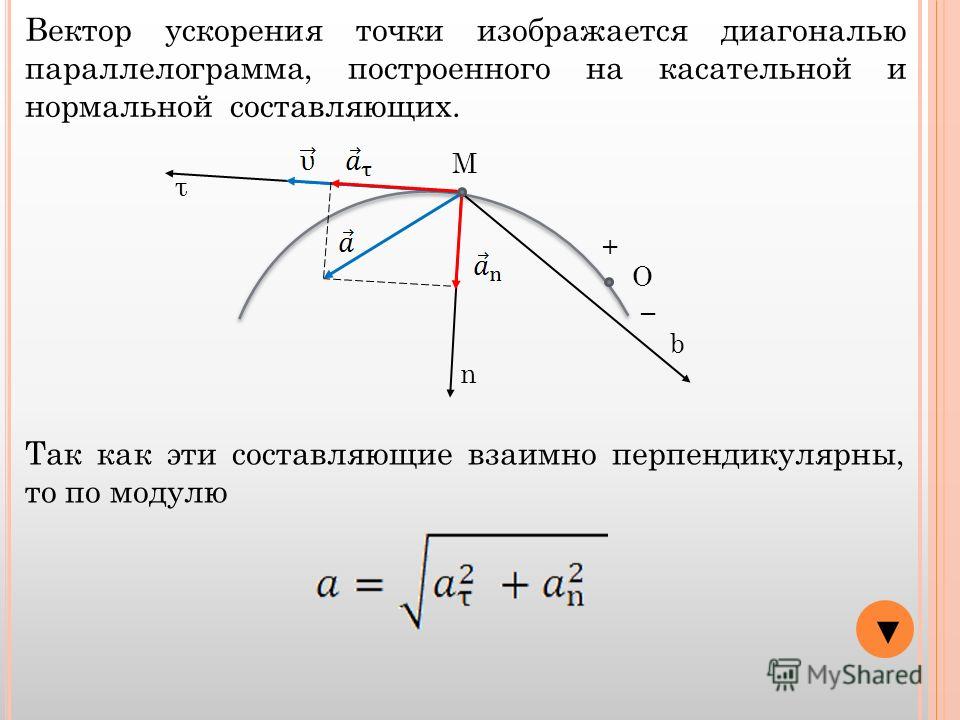
Вектору скорости (как и другим векторам) присущи два атрибута (неотъемлемых свойства): модуль (длина) и направление в пространстве. Производная вектора скорости по времени показывающая, как быстро изменяется вектор скорости со временем, может быть представлена в виде суммы двух слагаемых. Одно из этих слагаемых показывает, как быстро изменяется величина скорости – это тангенциальное (касательное) ускорение. Другое слагаемое характеризует быстроту изменения направления скорости – это нормальное (перпендикулярное к касательной, проходящей через точку касания к траектории) ускорение. В средней школе это ускорение называют центростремительным. Таким образом, имеем . Учитывая взаимную перпендикулярность векторов тангенциального и нормального ускорений, в соответствии с теоремой Пифагора, получаем полезную формулу .
Производная вектора скорости по времени показывающая, как быстро изменяется вектор скорости со временем, может быть представлена в виде суммы двух слагаемых. Одно из этих слагаемых показывает, как быстро изменяется величина скорости – это тангенциальное (касательное) ускорение. Другое слагаемое характеризует быстроту изменения направления скорости – это нормальное (перпендикулярное к касательной, проходящей через точку касания к траектории) ускорение. В средней школе это ускорение называют центростремительным. Таким образом, имеем . Учитывая взаимную перпендикулярность векторов тангенциального и нормального ускорений, в соответствии с теоремой Пифагора, получаем полезную формулу .
1.46. Точка движется в плоскости так, что проекции ее скорости на оси прямоугольной системы координат равны , . Вычислите величину нормального ускорения, соответствующего времени t = 0,5 с.
1.47. Закон движения материальной точки задан уравнениями , , . Вычислите величину нормального ускорения, соответствующего времени t = 1 с.
Вычислите величину нормального ускорения, соответствующего времени t = 1 с.
1.48. Небольшое тело бросили горизонтально со скоростью = 3 м/с в поле сил тяжести (g = 10 м/с2). Вычислите величину нормального ускорения тела, соответствующего времени t = 0,4 с после старта.
Радиус кривизны траектории.
Можно показать, что нормальное ускорение, характеризующее быстроту изменения направления скорости, связано с величиной скорости формулой . Здесь ρ – радиус кривизны траектории. Отсюда получаем . Именно такой формулой будем пользоваться для нахождения радиуса кривизны траектории в этом разделе.
1.54. Небольшое тело бросили горизонтально со скоростью = 5 м/с в однородном поле сил тяжести (g = 10 м/с2). Вычислите радиус кривизны траектории в непосредственной близости от старта.
1.56. Точка движется в плоскости так, что проекции ее скорости на оси прямоугольной системы координат равны , . Вычислите радиус кривизны траектории.
Вычислите радиус кривизны траектории.
1.57. Закон движения материальной точки задан уравнениями , , . Вычислите радиус кривизны траектории.
Задачи для семинара. В скобках домашнее задание 1.3 (1.1, 1.2), 1.8 (1.5, 1.6), 1.12 (1.11, 1.13), 1.40 (1.36, 1.37, 1.39), 1.47 (1.46, 1.48), 1.57 (1.54, 1.56)
Дата добавления: 2015-11-05; просмотров: 178 | Нарушение авторских прав
| | | следующая лекция ==> | |
| ЗАДАЧА 15 ИНДИВИДУАЛЬНОГО ЗАДАНИЯ | | | Экзаменационные вопросы |
Центростремительное ускорение при движении по окружности
Центростремительное ускорение при движении по окружностиРавномерное движение по окружности
Рассмотрим равномерное движение материальной точки по окружности. При равномерном движении величина скорости постоянна ($v=const$). Однако ускорение точки при этом не равно нулю, так как скорость при движении по окружности постоянно изменяет свое направление. Вектор скорости является касательным к траектории, по которой движется точка, то есть является касательной к окружности в рассматриваемой точке
При равномерном движении величина скорости постоянна ($v=const$). Однако ускорение точки при этом не равно нулю, так как скорость при движении по окружности постоянно изменяет свое направление. Вектор скорости является касательным к траектории, по которой движется точка, то есть является касательной к окружности в рассматриваемой точке
Рассмотрим точки A и B лежащие на окружности по которой движется точка. Вектор изменения скорости при перемещении частицы из А в B равен:
\[\Delta \overline{v}={\overline{v}}_B-{\overline{v}}_A\left(1\right).\]
При бесконечно малом времени движения частицы, между точками A и B, дуга AB примерно равна длине хорды AB. Треугольники AOB и BCD подобны, поэтому получим:
\[\frac{\Delta v}{v}=\frac{\Delta l}{R}=\alpha \left(2\right),\]
где R – радиус окружности.
Величину среднего ускорения определим как:
\[\left\langle a\right\rangle =\frac{\Delta v}{\Delta t}=\frac{v\Delta l}{R\Delta t}\left(3\right). 2_1}{R}\ \left(2.6\right).\]
2_1}{R}\ \left(2.6\right).\]
Выразим искомое время из (2.6), имеем:
\[t_1=\sqrt{\frac{R\ tg\ \alpha }{A}}.\]
Ответ. $t_1=\sqrt{\frac{R\ tg\ \alpha }{A}}$
Читать дальше: циклическая частота.
236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
How to Handle Velocity as a Vector Манекены с онлайн-практикой
Исследуйте книгу Купить на Amazon
Скорость — это вектор, и, как таковой, он имеет связанную с ним величину и направление. Предположим, вы едете в автомобиле на восток со скоростью 88 м/с, когда вы начинаете ускоряться на север со скоростью 5,0 м/с.0019 2 на 10,0 секунд. Какова ваша конечная скорость?
Вы можете подумать, что можете использовать это уравнение, чтобы найти ответ:
v f = v o + a x t
Но это не векторное уравнение; величины здесь называются скалярами (величина вектора есть скаляр).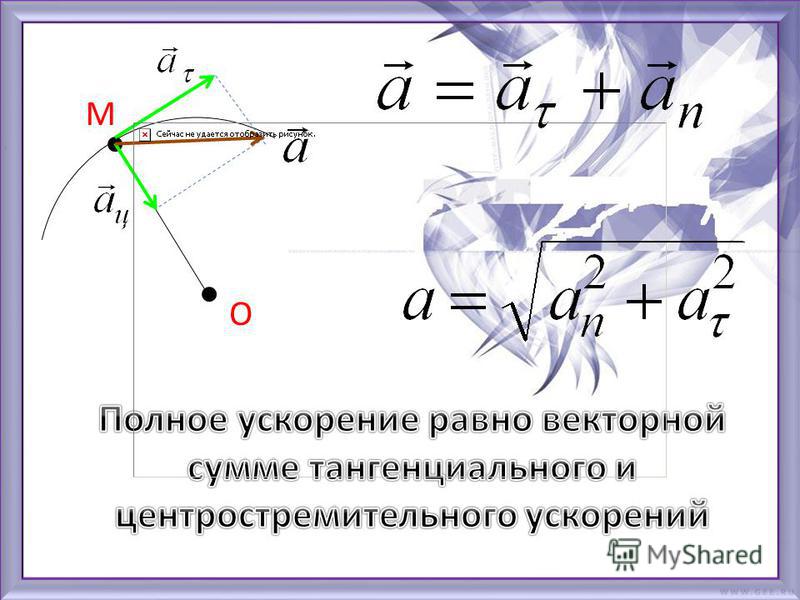 Это скалярное уравнение, и его здесь использовать нельзя, потому что ускорение и начальная скорость не совпадают. На самом деле скорость сама по себе является скаляром, так что вы должны думать не о скорости, а о скорости.
Это скалярное уравнение, и его здесь использовать нельзя, потому что ускорение и начальная скорость не совпадают. На самом деле скорость сама по себе является скаляром, так что вы должны думать не о скорости, а о скорости.
Вот то же уравнение, что и векторное уравнение:
v f = v o + a x t
Обратите внимание, что скорости теперь являются скоростями (скорость является величиной вектора скорости) и что здесь все является вектором, кроме времени (которое всегда является скаляром). Это изменение означает, что сложение, которое вы выполняете в этом уравнении, является векторным сложением, а это то, что вам нужно, потому что векторы могут обрабатывать сложение в нескольких измерениях, а не только по прямой линии.
Вот уравнения движения, записанные в виде векторных уравнений:
v f = v o + a x t
Пример вопроса
Вы едете в машине на восток со скоростью 88,0 м/с; затем вы ускоряетесь на север со скоростью 5,00 м/с 2 в течение 10,0 секунд.
 Какова ваша конечная скорость?
Какова ваша конечная скорость?Правильный ответ: 101 метр в секунду.
Начните с этого векторного уравнения:
v f = v o + a x t
Это уравнение представляет собой простое сложение векторов, поэтому рассматривайте вовлеченные величины как векторы.
То есть v o = (88, 0) метров в секунду и a = (0, 5) метров в секунду 2 . Вот как выглядит уравнение, если подставить числа:
v f = (88,0, 0) + (0, 5,00)(10,0)
Посчитайте:
v f = (88,0, 0) + (0, 5,00) (10,0) = (88,0, 50,0)
Вас просят найти конечную скорость, то есть величину скорости.
 Подставьте свои числа в теорему Пифагора.
Подставьте свои числа в теорему Пифагора.Вы также можете найти конечное направление.
Примените уравнение тета = тангенс -1 ( y / x ), чтобы найти угол, который в данном случае равен tan –1 (50,0/88,0) = tan –1 (0,57) = 29,6 градуса.
Практические вопросы
Вы движетесь со скоростью 40,0 метров в секунду на восток, а затем ускоряетесь на 10,0 метров в секунду 2 на север в течение 10,0 секунд. Каковы направление и величина вашей конечной скорости?
Вы движетесь со скоростью 44,0 метра в секунду под углом 35 градусов, а затем ускоряетесь прямо на запад со скоростью 4,0 метра в секунду 2 на 20,0 секунд. Каковы направление и величина вашей конечной скорости?
Хоккейная шайба движется со скоростью 100,0 м/с под углом 250 градусов, когда в нее попадает хоккейная клюшка, что ускоряет ее до 1,0 x 10 3 м/с 2 при 19 градусах за 0,10 секунды.
 Каковы направление и величина конечной скорости шайбы?
Каковы направление и величина конечной скорости шайбы?Автомобиль движется по обледенелой дороге со скоростью 10,0 м/с под углом 0 градусов, когда его заносит, ускоряясь со скоростью 15 м/с 2 при 63 градусах в течение 1,0 секунды. Каковы направление и величина конечной скорости автомобиля?
Ниже приведены ответы на практические вопросы:
Величина 108 метров в секунду, угол 68 градусов
Начало с этим уравнением: V F = V O + A X T .
Подставьте числа: v f = (40,0, 0) + (0, 10,0)(10,0) = (40,0, 100,0).
Преобразование вектора (40,0, 100,0) в форму величины/угла. Используйте уравнение тета = тангенс –1 ( y / x ), чтобы найти угол: тангенс –1 (100,0/40,0) = тангенс –1 (2,5) = 68 градусов.

Применить уравнение
, чтобы найти скорость — величина скорости, дающая вам 108 метров в секунду.
Величина 50,7 м/с, угол 150 градусов
Начало с этим уравнением: V F = V O + A X T.
Преобразование исходной скорости в представление компонент вектора.
Используйте уравнение v x = v cos theta, чтобы найти координату x исходного вектора скорости: 44,0 x cos 35 градусов = 36,0.
Используйте уравнение v y = v sin theta , чтобы найти y координату скорости: 44,0 x sin 35 градусов, или 25,2. Таким образом, скорость равна (36,0, 25,2) в координатной форме.
Выполните сложение векторов: (36,0, 25,2) + (–4,0, 0)(20,0) = (–44,0, 25,2).

Преобразование вектора (–44,0, 25,2) в форму модуля/угла.
Используйте уравнение тета = тангенс –1 ( y / x ), чтобы найти угол: тангенс –1 (25,2/–44,0) = тангенс –1 (0,57) = 150 градусов.
Применить уравнение
, чтобы найти скорость — величина скорости, дающая вам 50,7 метра в секунду.
Величина 86,1 метра в секунду, угол –46 градусов
Начало с этим уравнением: V F = V O + A . + A 4. x .
Преобразование исходной скорости в представление компонент вектора.
Используйте уравнение v x = v cos тета , чтобы найти координату x исходного вектора скорости: 100,0 x cos 250 градусов = -34,2.
Используйте уравнение v y = v sin theta , чтобы найти y координату скорости: 100,0 x sin 250 градусов, или -94,0.
Таким образом, исходная скорость равна (–34,2, –94,0) в координатной форме.
Преобразовать ускорение в компоненты.
Используйте уравнение a x = a cos тета, чтобы найти x координата ускорения: (1.0 x 10 3 )cos 19 градусов = 946.
Используйте уравнение a y = a sin theta, чтобы найти координату ускорения y : (1,0 x 10 3 )sin 19 градусов, или 305,.
Итак, ускорение равно (946, 325) в координатной форме.
Выполните сложение векторов: (–34,2, –94,0) + (945, 325)(0,1) = (60,3, –61,5).
Преобразование вектора (60,3, –61,5) в форму величины/угла.

Используйте уравнение theta = tan –1 ( y / x ), чтобы найти угол: tan –1 (61,5/60,3) = tan –1 (–1,0) = –46 градусов .
Применить уравнение
, чтобы найти скорость — величина скорости, дающая вам 86,1 метра в секунду.
Магнитуда 21,5 м/с, угол 39градусов
Start с этим уравнением: V F = V O + A X 59 T..
Преобразование исходной скорости в представление векторной компоненты: (10,0, 0) метров в секунду.
Преобразование ускорения в компоненты. Используйте уравнение a x = a cos тета, чтобы найти координату ускорения x : 15 x cos 63 градуса = 6,8.

Используйте уравнение a y = a sin theta, чтобы найти координату ускорения y : 15 x sin 63 градуса, или 13,4.
Таким образом, ускорение равно (6,8, 13,4) в координатной форме.
Выполните векторное сложение: (10.0, 0) + (6.8, 13.4)(1.0) = (16.8, 13.4).
Преобразование вектора (16.8, 13.4) в форму величины/угла.
Используйте уравнение тета = тангенс –1 ( y / x ), чтобы найти угол: тангенс –1 (13,4/16,8) = тангенс –1 (0,79) = 39 градусов.
Применить уравнение
, чтобы найти модуль скорости, что дает вам 21,5 метра в секунду.
Об этой статье
Эта статья из книги:
- Рабочая тетрадь по физике I для чайников с онлайн-практикой,
Об авторе книги:
Эту статью можно найти в категории:
- Физика,
Направление векторов1 и
Горячая математика Величина вектора
Величина вектора
п
Вопрос
→
это расстояние между начальной точкой
п
и конечная точка
Вопрос
. В символах величина
п
Вопрос
→
записывается как
|
п
Вопрос
→
|
.
В символах величина
п
Вопрос
→
записывается как
|
п
Вопрос
→
|
.
Если заданы координаты начальной и конечной точек вектора, то
Формула расстояния
можно использовать для нахождения его величины.
|
п
Вопрос
→
|
знак равно
(
Икс
2
−
Икс
1
)
2
+
(
у
2
−
у
1
)
2
Пример 1:
Найдите величину вектора
п
Вопрос
→
чья начальная точка
п
я сидела
(
1
,
1
)
и конечная точка находится в
Вопрос
я сидела
(
5
,
3
)
.
Решение:
Используйте формулу расстояния.
Подставьте значения
Икс
1
,
у
1
,
Икс
2
, а также
у
2
.
|
п
Вопрос
→
|
знак равно
(
5
−
1
)
2
+
(
3
−
1
)
2
знак равно
4
2
+
2
2
знак равно
16
+
4
знак равно
20
≈
4,5
Величина
п
Вопрос
→
около
4,5
.
Направление вектора
Направление вектора — это мера угла, который он образует с
горизонтальная линия
.
Для нахождения направления вектора можно использовать одну из следующих формул:
загар
θ
знак равно
у
Икс
, куда
Икс
горизонтальное изменение и
у
вертикальное изменение
или же
загар
θ
знак равно
у
2
−
у
1
Икс
2
−
Икс
1
, куда
(
Икс
1
,
у
1
)
является начальной точкой и
(
Икс
2
,
у
2
)
является конечной точкой.
Пример 2:
Найдите направление вектора
п
Вопрос
→
чья начальная точка
п
я сидела
(
2
,
3
)
и конечная точка находится в
Вопрос
я сидела
(
5
,
8
)
.
Заданы координаты начальной и конечной точки. Подставляем их в формулу
загар
θ
знак равно
у
2
−
у
1
Икс
2
−
Икс
1
.
загар
θ
знак равно
8
−
3
5
−
2
знак равно
5
3
Найдите обратный загар, затем воспользуйтесь калькулятором.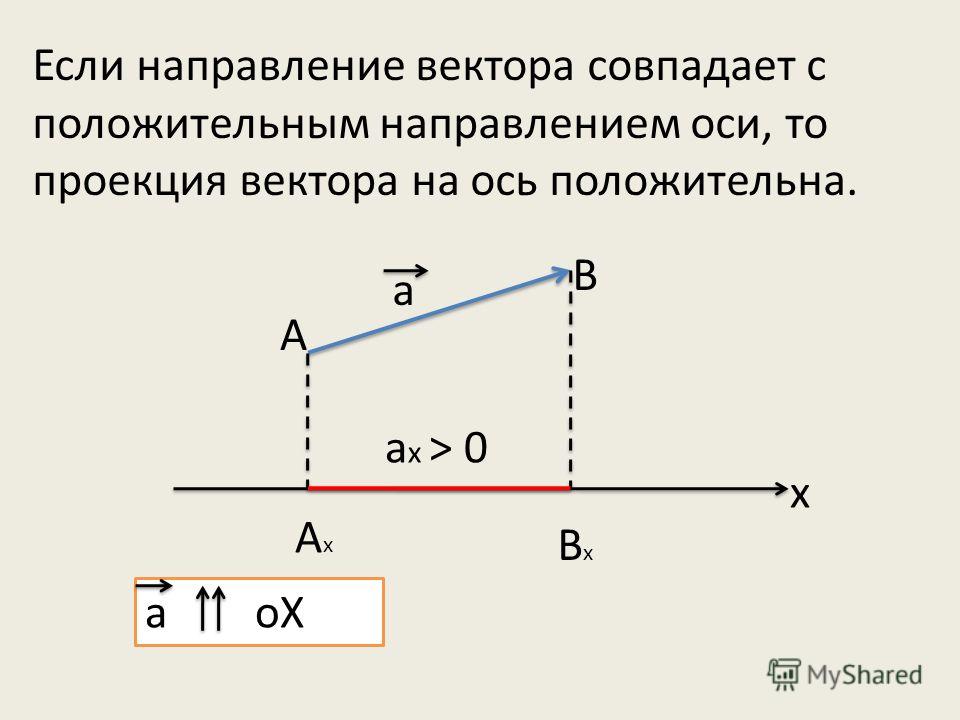
θ
знак равно
загар
−
1
(
5
3
)
≈
59
°
Вектор
п
Вопрос
→
имеет направление около
59°
.
Отображение символов скорости и направления из векторов U и V
В этом блоге показано, как вычислять и отображать скорость и направление ветра или течения, когда базовые данные хранятся в виде векторов U и V. Чтобы зафиксировать скорость и направление ветра или водного течения, анемометры или доплеровские профилировщики течения измеряют скорость ветра или воды в двух перпендикулярных направлениях, U и V. U – скорость на восток, а V – скорость на север. . U иногда называют зональной скоростью, а V – меридиональной скоростью.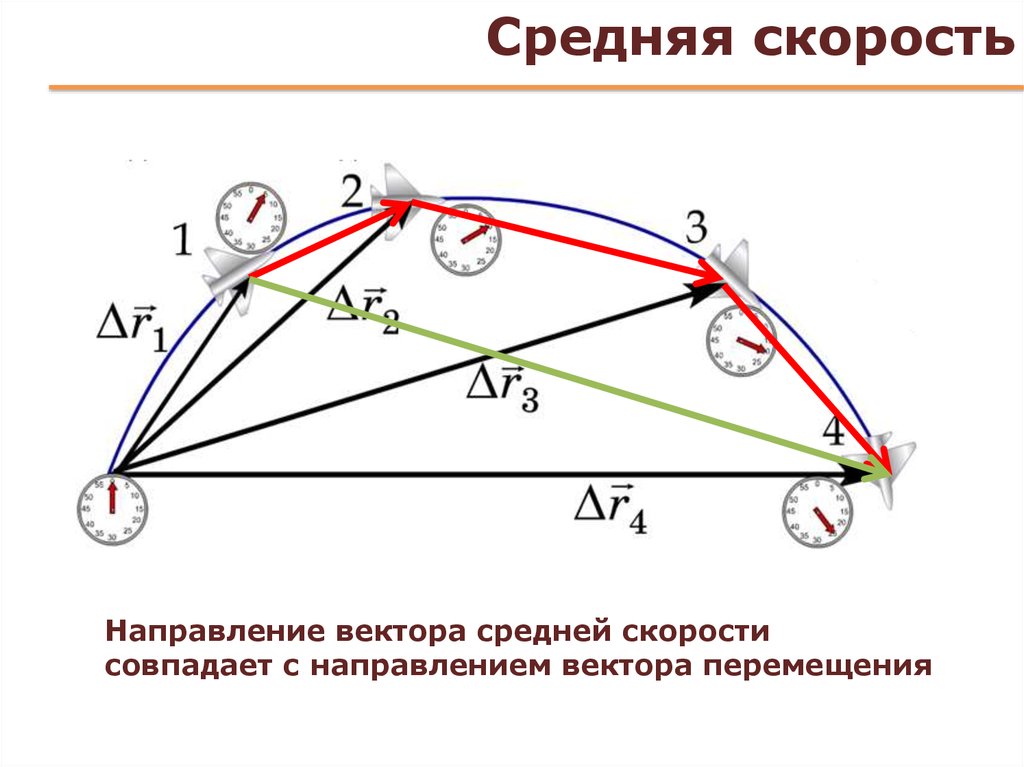 Используя U и V, можно рассчитать как скорость, так и направление ветра или течения воды.
Используя U и V, можно рассчитать как скорость, так и направление ветра или течения воды.
Хранение информации о потоках ветра или воды в виде векторов обеспечивает гибкость при расчете направления. Это важно, потому что метеорологи и океанологи по-разному описывают течение ветра. Океанографы предпочитают описывать ветер в терминах «направления массового потока» или, другими словами, направления к , в котором дует ветер. В океанографической традиции ветер, дующий с юга на север, обозначается стрелкой, указывающей на север. Метеорологи используют стрелку или специальный символ, называемый зазубриной ветра, чтобы указать направление от которого ветер дует. Наконечник стрелки или ветровой бородки указывает в направлении, откуда дует ветер. В метеорологическом соглашении ветер, дующий с запада на восток, обозначается стрелкой, указывающей на запад. Водные течения почти всегда обозначаются океанографическими символами.
Отображение направления
Для правильного отображения направления ветра или течения в ArcMap компоненты U и V должны быть преобразованы в угол поворота символа. В приведенных ниже шагах предполагается, что у вас есть класс точечных объектов с полями атрибутов u и v. Чтобы рассчитать поворот, выполните следующие действия:
В приведенных ниже шагах предполагается, что у вас есть класс точечных объектов с полями атрибутов u и v. Чтобы рассчитать поворот, выполните следующие действия:
- Щелкните правой кнопкой мыши точечный слой в таблице содержания.
- Щелкните Свойства и щелкните вкладку Символы .
- Щелкните символ. Откроется диалоговое окно Выбор символа .
- Выберите стрелу или шип ветра, острие которого указывает на север.
- Нажмите OK , чтобы закрыть диалоговое окно Выбор символа.
- Щелкните Advanced и выберите Rotation из раскрывающегося списка. Откроется диалоговое окно «Поворот».
- Выберите <выражение> в раскрывающемся списке.
- Нажмите кнопку «Построитель выражений», чтобы указать выражение, которое будет использоваться для поворота символа.
- Укажите одно из следующих выражений:
- Океанографическая конвенция: (180/3.
 14) * Atn2([u],[v])
14) * Atn2([u],[v]) - Метеорологическая конвенция: (180/3.14) * Atn2([u],[v])+180
Примечание. Вышеприведенные формулы верны только в том случае, если U и V измеряются относительно сетки, где истинный север постоянно указывает строго вверх (например, без вращения). В противном случае необходимо применить коррекцию угла конвергенции на основе проекции данных.
- Нажмите OK , чтобы закрыть диалоговое окно Expression Builder.
- Нажмите Географический для стиля поворота.
- Щелкните OK во всех диалоговых окнах.
На этом изображении показана вкладка «Символы» и «Селектор символов» с отмеченными шагами для применения поворота символов.
На этом изображении показано диалоговое окно Expression Builder с отмеченными шагами для применения поворота символа.
Отображение скорости
Аналогичным образом можно использовать компоненты U и V для расчета и отображения скорости ветра или течения в ArcMap.
- Щелкните правой кнопкой мыши точечный слой в таблице содержания.
- Щелкните Свойства и щелкните вкладку Символы .
- Щелкните Расширенный и выберите Размер из раскрывающегося списка. Откроется диалоговое окно Размер.
- Выберите <выражение> в раскрывающемся списке.
- Нажмите кнопку «Построитель выражений», чтобы указать выражение, которое будет использоваться для размера символов.
- Укажите для выражения следующее: Sqr([u]**2 + [v]**2) Совет. ArcMap предполагает, что размер символа, возвращаемого выражением, указан в пунктах (1/72 дюйма). . Если скорость ветра или течения в ваших данных относительно низкая, символы могут быть слишком маленькими и неудобными для картографии. Вы можете настроить размер символов, включив в формулу коэффициент масштабирования. Например, Sqr([u]**2 + [v]**2) * 10 увеличит размер символов в 10 раз.
- Нажмите OK , чтобы закрыть диалоговое окно Expression Builder.

- Щелкните OK во всех диалоговых окнах.
Кевин Батлер
Кевин Батлер (Kevin Butler) — инженер по продукту в группе анализа и геообработки Esri, который является связующим звеном с научным сообществом. Он имеет докторскую степень. по географии Кентского государственного университета. За последнее десятилетие он работал над стратегическими проектами, сотрудничая с клиентами и другими членами научного сообщества, чтобы помочь в разработке крупных экологических информационных продуктов, таких как экологические наземные единицы, экологические морские единицы и экологические прибрежные единицы. Его исследовательские интересы включают тематическую направленность на пространственные статистические аналитические рабочие процессы, методологическую направленность на методы пространственной кластеризации и географическую направленность на Пуэрто-Рико и города Среднего Запада.
Подключить:
Связанный контент:
4.
 3: Ускоренное движение при изменении направления вектора скорости
3: Ускоренное движение при изменении направления вектора скорости
В символах величина
п
Вопрос
→
записывается как
|
п
Вопрос
→
|
. Используя U и V, можно рассчитать как скорость, так и направление ветра или течения воды. В приведенных ниже шагах предполагается, что у вас есть класс точечных объектов с полями атрибутов u и v. Чтобы рассчитать поворот, выполните следующие действия:- Океанографическая конвенция: (180/3. 14) * Atn2([u],[v])
- Метеорологическая конвенция: (180/3.14) * Atn2([u],[v])+180
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 19382
- Howard Martin пересмотрено Аланом Нг
- University of Wisconsin-Madison
Одно ключевое отличие одномерного движения состоит в том, что в двух измерениях возможно ускорение, даже если скорость постоянна. Напомним, вектор ускорения определяется как производная по времени вектора скорости ( уравнение 4.1.4 ). Это означает, что если вектор скорости изменяется со временем, то вектор ускорения отличен от нуля. Если длина вектора скорости (скорости) постоянна, все еще возможно, что направление вектора скорости изменяется со временем, и, таким образом, вектор ускорения не равен нулю. Это, например, то, что происходит, когда объект движется по кругу с постоянной скоростью (меняется направление вектора скорости).
Это, например, то, что происходит, когда объект движется по кругу с постоянной скоростью (меняется направление вектора скорости).
На рисунке \(\PageIndex{1}\) показан вектор скорости \(\vec v(t)\) в два разных момента времени, \(\vec v_1\) и \(\vec v_2\) , а также разность векторов \(\Delta \vec v=\vec v_2 – \vec v_1\) между ними. При этом длина вектора скорости не менялась со временем (\(||\vec v_1||=||\vec v_2||\)). Вектор ускорения определяется выражением:
\[\begin{align} \vec a = \lim_{\Delta t\to 0}\frac{\Delta \vec v}{\Delta t}\end{align}\]
и будет иметь направление, параллельное \(\Delta \vec v\), и величину, пропорциональную \(\Delta v\). Таким образом, даже если вектор скорости не изменяет амплитуду (скорость постоянна), вектор ускорения может быть ненулевым, если вектор скорости меняет направление .
Запишем вектор скорости \(\vec v\) через его величину \(v\) и единичный вектор \(\hat v\) в направлении \(\vec v \): 92}\\ \hat v &= \frac{v_x}{v}\hat x+\frac{v_y}{v}\hat y\\\end{aligned}\]
В самом общем случае со временем может меняться как величина скорости, так и ее направление. То есть и направление, и величина вектора скорости являются функциями времени:
То есть и направление, и величина вектора скорости являются функциями времени:
\[\begin{выровнено} \vec v(t)&=v(t)\шляпа v(t)\end{выровнено}\]
Когда мы берем производную по времени от \(\vec v(t)\) для получения вектора ускорения, нам нужно взять производную от произведения двух функций времени, \(v(t)\) и \( \шляпа v(t)\). Используя правила взятия производной произведения, вектор ускорения определяется как:
\[\begin{aligned} \vec a &= \frac{d}{dt}\vec v(t)= \frac{d}{dt}v(t)\hat v(t)\nonumber \end {выровнено}\]
\[ \vec a = \frac{dv}{dt}\hat v(t)+v(t)\frac{d\hat v}{dt} \]
и имеет два термина. Первый член, \(\frac{dv}{dt}\hat v(t)\), равен нулю, если скорость постоянна (\(\frac{dv}{dt}=0\)). Второй член, \(v(t)\frac{d\hat v}{dt}\), равен нулю, если направление вектора скорости постоянно (\(\frac{d\hat v}{dt}= 0\)). Однако в общем случае вектор ускорения имеет два члена, соответствующих изменению скорости и изменению направления скорости соответственно. 2}}\frac{dv_x}{dt}\hat y\nonumber\\ &=\frac{dv_x}{dt}\hat x – \frac{v_x(t)}{v_y(t)}\frac {dv_x}{dt}\шляпа y\nonumber \end{выровнено}\]
2}}\frac{dv_x}{dt}\hat y\nonumber\\ &=\frac{dv_x}{dt}\hat x – \frac{v_x(t)}{v_y(t)}\frac {dv_x}{dt}\шляпа y\nonumber \end{выровнено}\]
\[\vec a=\frac{dv_{x}}{dt}\left( \hat x – \frac{v_{x}(t)}{v_{y}(t)}\hat y \right )\]
, где большая часть алгебры, которую мы сделали, состояла в том, чтобы разделить \(x\) и \(y\) компоненты вектора ускорения, и мы использовали цепное правило, чтобы получить производную квадратного корня. Результирующий вектор ускорения показан на рисунке \(\PageIndex{2}\) вместе с вектором скорости 1 .
Рисунок \(\PageIndex{2}\): Иллюстрация того, что вектор ускорения перпендикулярен вектору скорости, если скорость постоянна.Вектор скорости имеет компоненты \(v_x\) и \(v_y\), что позволяет нам вычислить угол \(\theta\), который он составляет с осью \(x\):
\[\begin{выровнено} \tan(\theta)=\frac{v_y}{v_x}\end{выровнено}\]
Точно так же вектор, параллельный ускорению, имеет компоненты \(1\) и \(-\frac{v_x}{v_y}\), что позволяет нам определить угол \(\phi\), под которым делает с осью \(х\):
\[\begin{aligned} \tan(\phi)=\frac{v_x}{v_y}\end{aligned}\]
Обратите внимание, что \(\tan(\theta)\) является инверсией \(\tan(\phi)\), или, другими словами, \(\tan(\theta)=\cot(\phi)\) , что означает, что \(\theta\) и \(\phi\) дополняют друг друга и, таким образом, должны в сумме давать \(\frac{\pi}{2}\) (90). Это означает, что вектор ускорения перпендикулярен вектору скорости, если скорость постоянна, а направление скорости изменяется .
Это означает, что вектор ускорения перпендикулярен вектору скорости, если скорость постоянна, а направление скорости изменяется .
Другими словами, когда мы записываем вектор ускорения, мы можем идентифицировать два компонента, \(\vec a_{\parallel}(t)\) и \(\vec a_{\perp}(t)\):
\[\begin{aligned} \vec a&=\frac{dv}{dt}\hat v(t)+v(t)\frac{d\hat v}{dt}\\ &=\vec a_{ \parallel}(t) + \vec a_{\perp}(t)\\ \следовательно \vec a_{\parallel}(t)&=\frac{dv}{dt}\hat v(t)\\ \ поэтому \vec a_{\perp}(t)&=v\frac{d\hat v}{dt}=\frac{dv_x}{dt} \left(\hat x – \frac{v_x(t)}{ v_y(t)}\шляпа y\right)\end{выровнено}\]
, где \(\vec a_{\parallel}(t)\) — составляющая ускорения, параллельная вектору скорости и отвечающая за изменение его величины, а \(\vec a_{\perp}(t )\), — составляющая, перпендикулярная вектору скорости и отвечающая за изменение направления движения.
Упражнение \(\PageIndex{1}\)
Спутник движется по круговой орбите вокруг Земли с постоянной скоростью. Что можно сказать о его векторе ускорения?
Что можно сказать о его векторе ускорения?
- Имеет нулевую величину.
- Он перпендикулярен вектору скорости.
- Он параллелен вектору скорости.
- Он находится в направлении, отличном от параллельного или перпендикулярного вектору скорости.
- Ответить
1. Скорее, это вектор, параллельный вектору ускорения, который проиллюстрирован, поскольку множитель \(\frac{dv_{x}}{dt}\) был опущен (как вы помните, умножение на скаляр только изменяет длина, а не направление)
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- Райан Мартин и др.
- Лицензия
- CC BY-SA
- Показать оглавление
- нет
- Теги
Направление вектора — формула
Направление вектора — это угол, образуемый вектором с горизонтальной осью, то есть с осью X. Направление вектора задается вращением против часовой стрелки угла вектора вокруг его хвоста строго на восток. Например, вектор с направлением 45 градусов — это вектор, повернутый на 45 градусов против часовой стрелки относительно строго на восток. Еще одно соглашение для выражения направления вектора – это угол поворота вектора вокруг его хвоста с востока, запада, севера или юга. Например, если вектор направлен на 60 градусов к северу от запада, это означает, что вектор, указывающий на запад, был повернут на 60 градусов в северном направлении.
Направление действия вектора определяется как направление вектора. Давайте узнаем направление векторной формулы и как определить направление вектора в разных квадрантах вместе с несколькими решенными примерами.
| 1. | Каково направление вектора? |
| 2. | Направление векторной формулы |
| 3. | Как найти направление вектора? |
| 4. | Часто задаваемые вопросы о направлении вектора |
Каково направление вектора?
Направление вектора — это ориентация вектора, то есть угол, который он образует с осью x. Вектор рисуется линией со стрелкой наверху и фиксированной точкой на другом конце. Направление, в котором направлена стрелка вектора, дает направление вектора. Например, скорость — это вектор. Он дает величину, с которой движется объект, а также направление, в котором движется объект. Точно так же направление приложения силы задается вектором силы. Направление вектора обозначается \(\overrightarrow{a} = |a|\hat{a}\), где |a| обозначает величину вектора, тогда как \(\hat{a}\) является единичным вектором и обозначает направление вектора a.
Точно так же направление приложения силы задается вектором силы. Направление вектора обозначается \(\overrightarrow{a} = |a|\hat{a}\), где |a| обозначает величину вектора, тогда как \(\hat{a}\) является единичным вектором и обозначает направление вектора a.
Направление векторной формулы
Направление векторной формулы связано с наклоном линии. Мы знаем, что наклон линии, проходящей через начало координат и точку (x, y), равен y/x. Мы также знаем, что если θ — угол, образуемый этой линией, то ее наклон равен tan θ, т. е. tan θ = y/x. Следовательно, θ = тангенс -1 (y/x). Таким образом, направление вектора (x, y) находится по формуле tan -1 (y/x), но при вычислении этого угла следует также учитывать квадрант, в котором лежит (x, y).
Шаги для нахождения направления вектора (x, y):
- Найдите α, используя α = tan -1 |y/x|.
- Найдите направление вектора θ, используя следующие правила, в зависимости от того, в каком квадранте (x, y) лежит:
| Квадрант, в котором (x, y) лежит | θ (в градусах) |
|---|---|
| 1 | α |
| 2 | 180° – α |
| 3 | 180° + α |
| 4 | 360° – α |
Чтобы найти направление вектора, концы которого заданы векторами положения (x 1 , y 1 ) и (x 2 , y 2 ), затем найти его направление:
- Найдите вектор (x, y) по формуле (x, y) = (x 2 – x 1 , y 2 – y 1 )
- Найдите α и θ, как описано выше.
Давайте теперь рассмотрим несколько примеров, чтобы понять, как найти направление вектора.
Как найти направление вектора?
Теперь, когда мы знаем формулы для определения направления вектора в разных квадрантах, давайте рассмотрим пример, чтобы понять применение формулы.
Пример 1: Определить направление вектора с начальной точкой P = (1, 4) и Q = (3, 9).
Для определения направления вектора PQ сначала определим координаты вектора PQ
(x, y) = (3-1, 9-4) = (2, 5). Направление вектора задается формулой
θ = tan -1 |5/2|
= 68,2° [Поскольку (2, 5) лежит в первом квадранте]
Направление вектора равно 68,2°.
Пример 2: Рассмотрим изображение, приведенное ниже.
Вектор на изображении выше образует угол 50° против часовой стрелки с востоком. Следовательно, направление вектора составляет 50° с востока.
Важные примечания о направлении вектора
- Направление вектора может быть выражено углом, который образует его хвост с востоком, севером, западом или югом.
- После определения значения тангенса -1 |y/x| мы можем применить соответствующую формулу для каждого квадранта.
- Направление вектора также может быть задано углом, образуемым вектором в направлении против часовой стрелки с востока.
Связанные темы по направлению вектора
- Векторы
- Векторные формулы
- Перекрестное произведение
Часто задаваемые вопросы о направлении вектора
Каково направление вектора?
Направление вектора — это угол, образуемый вектором с горизонтальной осью, то есть с осью X.
Каково направление векторной формулы?
Чтобы найти направление вектора (x, y):
- Найдите α, используя α = tan -1 |г/х|
- Направление вектора (x, y) определяется как:
- α, если (x, y) лежит в первом квадранте
- 180° – α, если (x, y) лежит во втором квадранте
- 180° + α, если (x, y) лежит в третьем квадранте
- 360° – α, если (x, y) лежит в четвертом квадранте
Как найти направление вектора?
Направление вектора можно вычислить, используя формулы для каждого квадранта.
Что представляет направление вектора?
Направление вектора представляет направление, в котором движется объект.
Как найти направление вектора, зная его компоненты?
Направление вектора можно определить, проверив квадрант, в котором находится вектор, и затем применив соответствующую формулу.
Вектор против скаляра
офис (808) 329-1627
- Дом
- О
- Новости
- Продукты
- Услуги
- F.Y.I.
- Связаться с
Векторное и скалярное усреднение данных о ветре
Ветер
описывается как имеющая как направление, так и величину (скорость), и это
поэтому является вектором количества. Хотя ветер является
количество векторов, направление и скорость ветра можно обрабатывать
отдельно как скалярных значений . При сборе данных о ветре
пробы обычно собираются с высокой частотой, а затем
в среднем за период времени от нескольких минут до часа.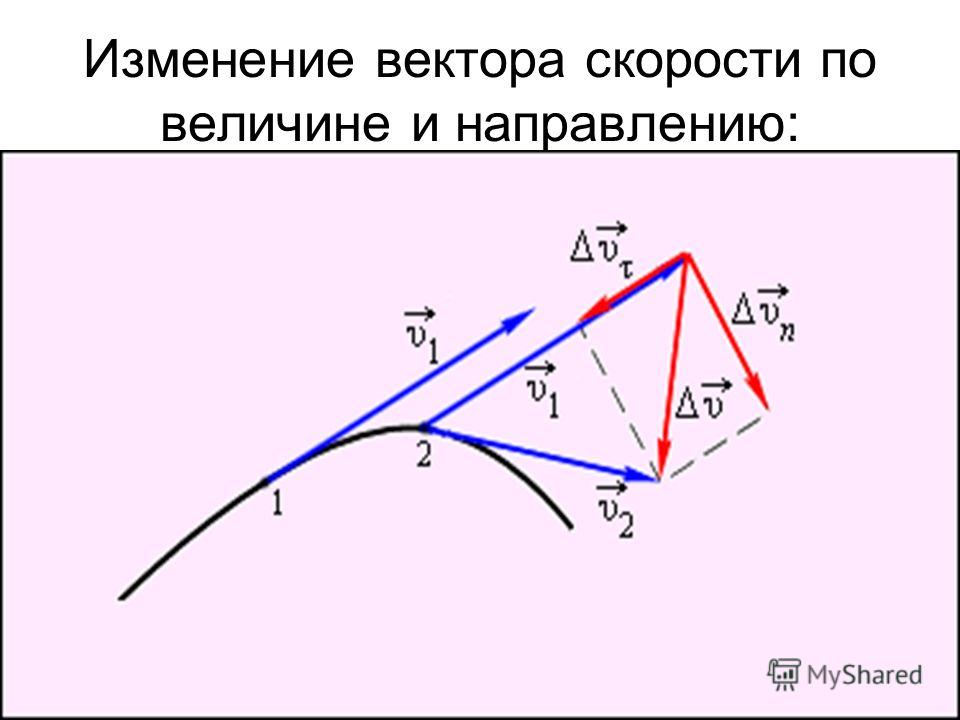 В зависимости от приложения и инструментов данные могут
быть векторным усреднением, скалярным усреднением или усреднением с использованием обоих
методы.
В зависимости от приложения и инструментов данные могут
быть векторным усреднением, скалярным усреднением или усреднением с использованием обоих
методы.
В скаляр усреднение данных о ветре, инструменты, такие как чашка или пропеллер анемометр и флюгер используются, чтобы сделать независимый измерения скорости и направления ветра. Инструменты отбираются через равные промежутки времени и простыми арифметическими средние значения выходов рассчитываются за период усреднения.
В векторе осреднении измеряются либо ортогональные составляющие ветра непосредственно духовым инструментом или скорость и направление измеряют анемометром и флюгером, а затем используют для получения ортогональных компонент. Чтобы получить усредненные по вектору скорость и направление, компоненты суммируются и вектор усредняется в конце времени усреднения.
В периоды
от умеренной до высокой скорости ветра, разница между вектором
и скалярные средние будут малы.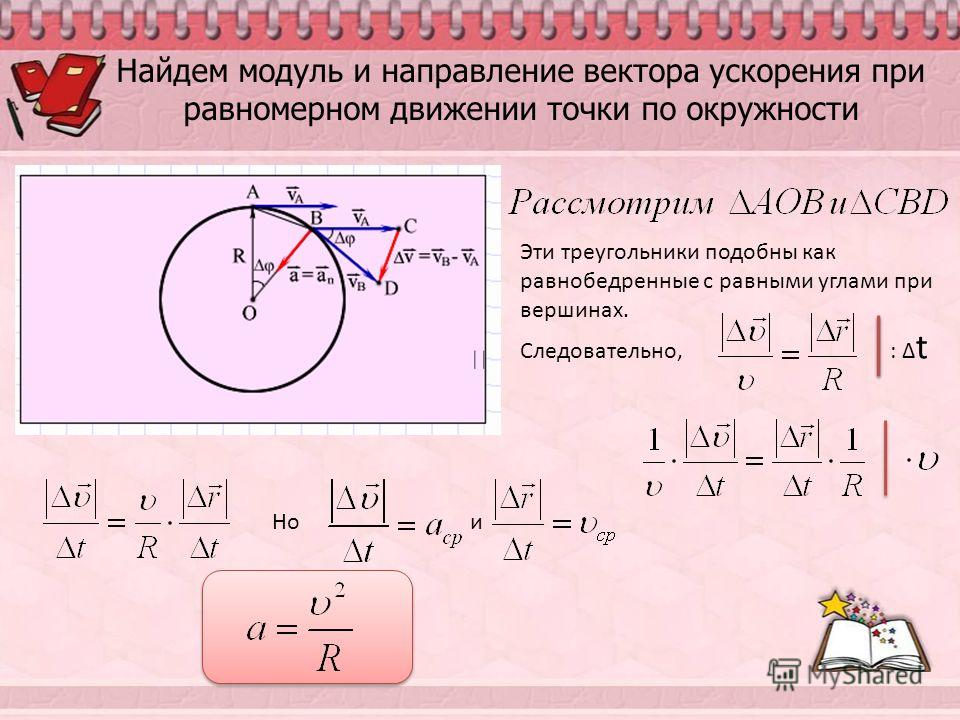 В случае скорости ветра
усредненная по вектору скорость никогда не будет больше, чем усредненная по скаляру
значений и, как правило, будет ниже. Большие различия будут
происходят с большей дисперсией направления ветра , которая обычно
происходит при более низких скоростях ветра (ниже примерно 2 метров в секунду).
В качестве крайнего примера предположим, что у нас постоянный ветер с севера.
со скоростью 5 метров в секунду в течение 5 минут с последующим постоянным ветром
5 метров в секунду с юга в течение 5 минут. Если мы
рассчитаны как векторные, так и скалярные средние за 10-минутный
период, скорость, усредненная по вектору, будет равна нулю, тогда как
скалярно-усредненная скорость будет 5 метров в секунду. В большинстве
реальных ситуациях изменчивость направления ветра намного меньше
чем этот крайний пример. При умеренной скорости ветра, как указано выше
около 5 метров в секунду, направление ветра стандартных отклонений
(сигма тета) обычно составляет от 5 до 10 градусов, а
разница между скалярным и векторным средними значениями скорости ветра будет
обычно находится в пределах одной-двух десятых метра в секунду.
В случае скорости ветра
усредненная по вектору скорость никогда не будет больше, чем усредненная по скаляру
значений и, как правило, будет ниже. Большие различия будут
происходят с большей дисперсией направления ветра , которая обычно
происходит при более низких скоростях ветра (ниже примерно 2 метров в секунду).
В качестве крайнего примера предположим, что у нас постоянный ветер с севера.
со скоростью 5 метров в секунду в течение 5 минут с последующим постоянным ветром
5 метров в секунду с юга в течение 5 минут. Если мы
рассчитаны как векторные, так и скалярные средние за 10-минутный
период, скорость, усредненная по вектору, будет равна нулю, тогда как
скалярно-усредненная скорость будет 5 метров в секунду. В большинстве
реальных ситуациях изменчивость направления ветра намного меньше
чем этот крайний пример. При умеренной скорости ветра, как указано выше
около 5 метров в секунду, направление ветра стандартных отклонений
(сигма тета) обычно составляет от 5 до 10 градусов, а
разница между скалярным и векторным средними значениями скорости ветра будет
обычно находится в пределах одной-двух десятых метра в секунду.
Ниже показаны некоторые фактические данные о скорости ветра с 10-метровой метеорологической вышки оснащен чашечным анемометром и флюгером:
Как векторные, так и регистрировались скалярно-осредненные скорости. Вектор- и усредненные скалярные скорости были получены с тем же анемометром и флюгера, но средние значения были получены с использованием другого вектора и методы скалярного усреднения. Эти данные были усреднены по 15-минутные периоды. На рисунке ниже также нанесены соответствующие измерения сигма-тета. Как показано на этом рисунке, разница между вектором и скаляром очень мала средняя скорость выше примерно 5 метров в секунду, хотя усредненные по вектору скорости немного ниже. Значения сигма-тета во время эти периоды более высоких скоростей обычно ниже примерно 10 градусов. При более низких скоростях большие отклонения между вектором и скаляром скорости, и соответствующие значения сигма-тета становятся большими.
В случае
направление ветра, также будут различия между вектором и
скалярные средние значения, особенно на более низких скоростях.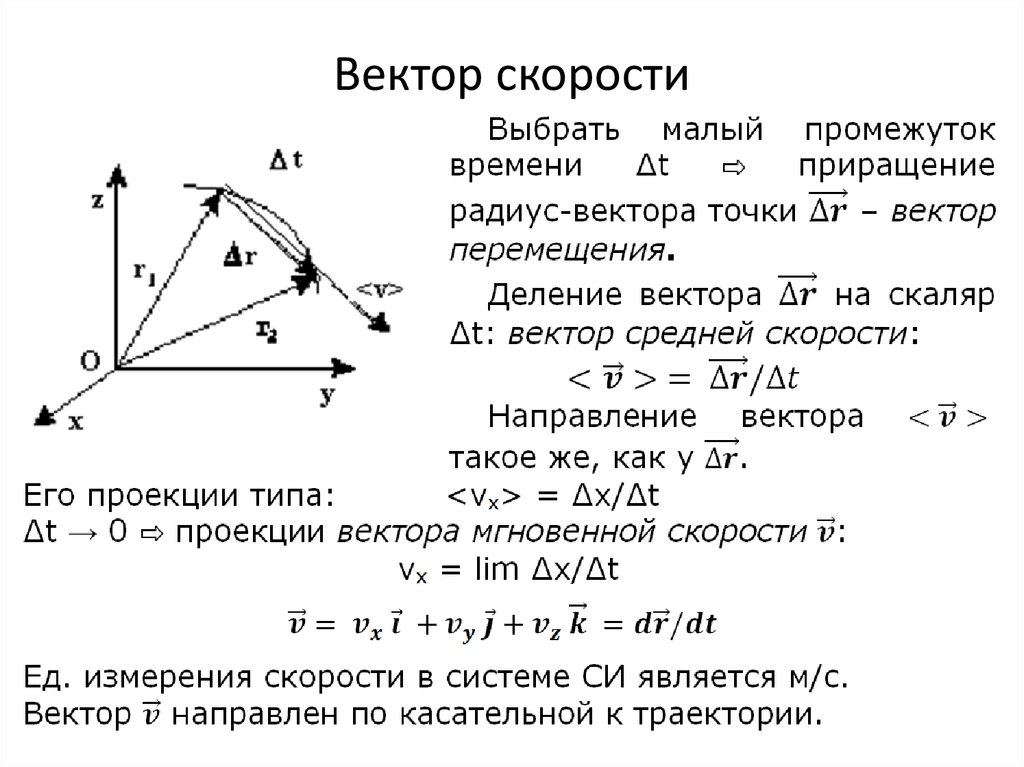 Векторное усреднение, в
эффект, взвешивает направление по скорости, тогда как скалярно-усредненное
направление не зависит от скорости. Как правило, разница между
вектор- и скалярно-осредненные направления ветра будут в пределах нескольких
градусов.
Векторное усреднение, в
эффект, взвешивает направление по скорости, тогда как скалярно-усредненное
направление не зависит от скорости. Как правило, разница между
вектор- и скалярно-осредненные направления ветра будут в пределах нескольких
градусов.
Содар системы по своей сути измеряют ветер, используя векторов средних значений. То есть они измеряют компоненты ветра, а затем комбинируют измерения компонентов для формирования вектора ветра при выбранном осреднении интервалы. В отличие от чашечных или пропеллерных анемометров и флюгеров, содар системы не измеряют скорость и направление ветра самостоятельно .
Некоторые отрасли,
такие как ветроэнергетика, традиционно использовали
скалярно-усредненные данные о ветре, полученные от анемометров на башнях. Один
можно утверждать, что усредненная по вектору скорость ветра может быть больше
представляет фактическую мощность ветра, доступную для ветряной турбины.
Тем не менее, в принципе, при желании, эмпирическом или
теоретические коэффициенты преобразования могут быть разработаны для оценки
скалярная скорость от усредненной по вектору скорости содара.