
404 Cтраница не найдена
Мы используем файлы cookies для улучшения работы сайта МГТУ и большего удобства его использования. Более подробную информацию об использовании файлов cookies можно найти здесь. Продолжая пользоваться сайтом, вы подтверждаете, что были проинформированы об использовании файлов cookies сайтом ФГБОУ ВО “МГТУ” и согласны с нашими правилами обработки персональных данных.
Размер:
AAA
Изображения Вкл. Выкл.
Обычная версия сайта
К сожалению запрашиваемая страница не найдена.
Но вы можете воспользоваться поиском или картой сайта ниже
|
|
 Педагогический (научно-педагогический) состав
Педагогический (научно-педагогический) составВычислительные методы для инженеров
Вычислительные методы для инженеров
ОглавлениеПРЕДИСЛОВИЕГлава 1. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И РЕШЕНИЕ ИНЖЕНЕРНЫХ ЗАДАЧ С ПРИМЕНЕНИЕМ ЭВМ § 1.  2. Основные этапы решения инженерной задачи с применением ЭВМ 2. Основные этапы решения инженерной задачи с применением ЭВМ§ 1.3. Вычислительный эксперимент § 1.4. Дополнительные замечания Глава 2. ВВЕДЕНИЕ В ЭЛЕМЕНТАРНУЮ ТЕОРИЮ ПОГРЕШНОСТЕЙ § 2.1. Источники и классификация погрешностей результата численного решения задачи § 2.2. Приближенные числа. Абсолютная и относительная погрешности 2. Правила записи приближенных чисел. 3. Округление. § 2.3. Погрешности арифметических операций над приближенными числами § 2.4. Погрешность функции § 2.5. Особенности машинной арифметики 2. Представление целых чисел. 3. Представление вещественных чисел. 4. Арифметические операции над числами с плавающей точкой. 5. Удвоенная точность. 6. Вычисление машинного эпсилон. § 2.6. Дополнительные замечания Глава 3. ВЫЧИСЛИТЕЛЬНЫЕ ЗАДАЧИ, МЕТОДЫ И АЛГОРИТМЫ. ОСНОВНЫЕ ПОНЯТИЯ § 3.2. Обусловленность вычислительной задачи 2. Примеры плохо обусловленных задач. 3. Обусловленность задачи вычисления значения функции одной переменной.  4. Обусловленность задачи вычисления интеграла … 5. Обусловленность задачи вычисления суммы ряда. § 3.3. Вычислительные методы § 3.4. Корректность вычислительных алгоритмов § 3.5. Чувствительность вычислительных алгоритмов к ошибкам округления § 3.6. Различные подходы к анализу ошибок § 3.7. Требования, предъявляемые к вычислительным алгоритмам § 3.8. Дополнительные замечания Глава 4. МЕТОДЫ ОТЫСКАНИЯ РЕШЕНИЙ НЕЛИНЕЙНЫХ УРАВНЕНИЙ § 4.2. Обусловленность задачи вычисления корня § 4.3. Метод бисекции § 4.4. Метод простой итерации § 4.5. Обусловленность метода простой итерации § 4.6. Метод Ньютона § 4.7. Модификации метода Ньютона § 4.8. Дополнительные замечания Глава 5. ПРЯМЫЕ МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ § 5.2. Нормы вектора и матрицы § 5.3. Типы используемых матриц § 5.4. Обусловленность задачи решения системы линейных алгебраических уравнений § 5.5 Метод Гаусса § 5.6. Метод Гаусса и решение систем уравнений с несколькими правыми частями, обращение матриц, вычисление определителей § 5.  7. Метод Гаусса и разложение матрицы на множители. LU-разложение 7. Метод Гаусса и разложение матрицы на множители. LU-разложение§ 5.8. Метод Холецкого (метод квадратных корней) § 5.9. Метод прогонки § 5.10. QR-разложение матрицы. Методы вращений и отражений § 5.11. Итерационное уточнение § 5.12. Дополнительные замечания Глава 6. ИТЕРАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ § 6.1. Метод простой итерации § 6.2. Метод Зейделя § 6.3. Метод релаксации § 6.4. Дополнительные замечания Глава 7. МЕТОДЫ ОТЫСКАНИЯ РЕШЕНИЙ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ § 7.2. Метод простой итерации § 7.3. Метод Ньютона для решения систем нелинейных уравнений 7.4. Модификации метода Ньютона § 7.5. О некоторых подходах к решению задач локализации и отыскания решений систем нелинейных уравнений § 7.6. Дополнительные замечания Глава 8. МЕТОДЫ РЕШЕНИЯ ПРОБЛЕМЫ СОБСТВЕННЫХ ЗНАЧЕНИЙ § 8.2. Степенной метод § 8.3. Метод обратных итераций § 8.4. QR-алгоритм § 8.5. Дополнительные замечания Глава 9.  МЕТОДЫ ОДНОМЕРНОЙ МИНИМИЗАЦИИ МЕТОДЫ ОДНОМЕРНОЙ МИНИМИЗАЦИИ§ 9.2. Обусловленность задачи минимизации § 9.3. Методы прямого поиска. Оптимальный пассивный поиск. Метод деления отрезка пополам. Методы Фибоначчи и золотого сечения § 9.4. Метод Ньютона и другие методы минимизация гладких функций § 9.5. Дополнительные замечания Глава 10. МЕТОДЫ МНОГОМЕРНОЙ МИНИМИЗАЦИИ § 10.1. Задача безусловной минимизации функции многих переменных § 10.2. Понятие о методах спуска. Покоординатный спуск § 10.3. Градиентный метод § 10.4. Метод Ньютона § 10.5. Метод сопряженных градиентов § 10.6. Метода минимизации без вычисления производных § 10.7. Дополнительные замечания Глава 11. ПРИБЛИЖЕНИЕ ФУНКЦИЙ И СМЕЖНЫЕ ВОПРОСЫ § 11.2. Интерполяция обобщенными многочленами § 11.3. Полиномиальная интерполяция. Многочлен Лагранжа § 11.4. Погрешность интерполяции § 11.5. Интерполяция с кратными узлами § 11.6. Минимизация оценки погрешности интерполяции. Многочлены Чебышева § 11.  7. Конечные разности 7. Конечные разности§ 11.8. Разделенные разности § 11.9. Интерполяционный многочлен Ньютона. Схема Эйткена § 11.10. Обсуждение глобальной полиномиальной интерполяции. Понятие о кусочно-полиномиальной интерполяции § 11.11. Интерполяция сплайнами § 11.12. Понятие о дискретном преобразовании Фурье и тригонометрической интерполяции § 11.13. Метод наименьших квадратов § 11.14. Равномерное приближение функций § 11.15. Дробно-рациональные аппроксимации и вычисление элементарных функций § 11.16. Дополнительные замечания Глава 12. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ § 12.1. Простейшие формулы численного дифференцирования § 12.2. О выводе формул численного дифференцирования § 12.3. Обусловленность формул численного дифференцирования § 12.4. Дополнительные замечания Глава 13. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ 13.2. Квадратурные формулы интерполяционного типа § 13.3. Квадратурные формулы Гаусса § 13.4. Апостериорные оценки погрешности. Понятие об адаптивных процедурах численного интегрирования § 13.  5. Вычисление интегралов в нерегулярных случаях 5. Вычисление интегралов в нерегулярных случаях§ 13.6. Дополнительные замечания Глава 14. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ ДЛЯ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ § 14.1. Задача Коши для дифференциального уравнения первого порядка § 14.2. Численные методы решения задачи Коши. Основные понятия и определения § 14.3. Использование формулы Тейлора § 14.4. Метод Эйлера § 14.5. Модификации метода Эйлера второго порядка точности § 14.6. Методы Рунге-Кутты § 14.7. Линейные многошаговые методы. Методы Адамса § 14.8. Устойчивость численных методов решения задачи Коши § 14.9. Неявный метод Эйлера § 14.10. Решение задачи Коши для систем обыкновенных дифференциальных уравнений и дифференциальных уравнений m-го порядка § 14.11. Жесткие задачи § 14.12. Дополнительные замечания Глава 15. РЕШЕНИЕ ДВУХТОЧЕЧНЫХ КРАЕВЫХ ЗАДАЧ § 15.1. Краевые задачи для одномерного стационарного уравнения теплопроводности § 15.2. Метод конечных разностей: основные понятия § 15.  3. Метод конечных разностей: аппроксимации специального вида 3. Метод конечных разностей: аппроксимации специального вида§ 15.4. Понятие о проекционных и проекционно-разностных методах. Методы Ритца и Гадеркина. Метод конечных элементов § 15.5. Метод пристрелки § 15.6. Дополнительные замечания |
 А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров: Учеб. пособие. — М.: Высш. шк., 1994. — 544 с.
А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров: Учеб. пособие. — М.: Высш. шк., 1994. — 544 с.
Исключение по Гауссу: Определитель матрицы с использованием прямого исключения: Предыстория: Youtube Одновременные линейные уравнения: Исключение по Гауссу: Определитель матрицы с использованием прямого исключения: Исходная информация: Youtube
Одновременные линейные уравнения: Гауссово исключение: Определитель Матрица с использованием прямого исключения: Фон: YoutubeSimultaneous Linear Уравнения: Исключение Гаусса: определитель матрицы с использованием Forward Исключение: Предыстория: Youtube ИСКЛЮЧЕНИЕ ГАУССА (ГЛАВА 04.
Определитель матрицы с использованием прямого исключения: Фон
К Аутар Кау | ||
| ||
| ОПИСАНИЕ ТЕМЫ | ||
Научитесь находить определитель
матрица с использованием прямых шагов исключения Гаусса. В этом видео вы узнаете, как найти определитель матрицы с использованием прямых шагов исключения Гаусса. | ||
| ВСЕ ВИДЕО ПО ЭТОЙ ТЕМЕ | ||
Наивное исключение Гаусса: Теория: Часть 1 из 2 [YOUTUBE 10:27] [СТЕНОК] Наивное исключение Гаусса: теория: часть 2 из 2 [YOUTUBE 2:22] [СТЕНОК] Наивный метод исключения Гаусса: Пример: Часть 1 из 2 (Выбывание вперед) [YOUTUBE 10:49] [СТЕНОК] Наивный метод исключения Гаусса: Пример: часть 2 из 2 (обратная замена) [YOUTUBE 6:40] [СТЕНОК] Подводные камни наивного исключения Гаусса Метод: [ЮТУБ 7:20] [СТЕНОК] Наивное исключение Гаусса: округление Проблемы с ошибками: Пример: часть 1 из 3 [YOUTUBE 7:20] [СТЕНОК] Наивное исключение Гаусса: округление Проблемы с ошибками: Пример: Часть 2 из 3 [YOUTUBE 7:40] [СТЕНОК] Наивное исключение Гаусса: округление Проблемы с ошибками: Пример: часть 3 из 3 [YOUTUBE 8:07] [СТЕНОК] Исключение по Гауссу с частичным Разворот: теория [YOUTUBE 10:39] [СТЕНОК] Исключение по Гауссу с частичным Поворот: Пример: часть 1 из 3 (выбывание вперед) [YOUTUBE 7:15] [СТЕНОК] Исключение по Гауссу с частичным Поворот: Пример: часть 2 из 3 (выбывание вперед) [YOUTUBE 10:08] [СТЕНОК] Исключение по Гауссу с частичным Поворот: Пример: часть 3 из 3 (обратная замена) [YOUTUBE 6:18] [СТЕНОК] Исключение по Гауссу с частичным Сводка: ошибки округления Проблемы: пример: часть 1 из 3 [YOUTUBE 8:58] [СТЕНОК] Исключение по Гауссу с частичным Сводка: Проблемы с округлением: Пример: Часть 2 из 3 [YOUTUBE 8:17] [СТЕНОК] Исключение по Гауссу с частичным Сводка: Проблемы с округлением: Пример: часть 3 из 3 [YOUTUBE 5:48] [СТЕНОК] Определитель матрицы с использованием форварда Метод исключения: Фон [YOUTUBE 5:17] [СТЕНОК] Определитель матрицы с использованием форварда Метод исключения: пример [YOUTUBE 10:07] [СТЕНОК] | ||
 ./../../../images/background.jpg”> ./../../../images/background.jpg”> | ||
| ПОЛНЫЕ РЕСУРСЫ | ||
| Получать в одной разместить следующее: главу учебника, презентацию PowerPoint, отдельные видеоролики с лекциями на YouTube, рабочие листы для иллюстрации метода и его сходимость, а также вопросы с несколькими вариантами ответов на Исключение по Гауссу. | ||
 06)
06) 
АУДИТОРИЯ | НАГРАДЫ | ЛЮДИ | ТРЕК | РАСПРОСТРАНЕНИЕ | ПУБЛИКАЦИИ | ||
Авторские права:
Университет
Южной Флориды, 4202 E Fowler Ave, Tampa, FL 33620-5350. Все права защищены. Вопросы, предложения или
комментарии, контакт kaw@eng. | АНАЛИТИКА | |
 usf.edu
Этот материал основан на работе, поддержанной Национальным научным фондом.
по гранту # 0126793, 0341468, д. 0717624 , 0836981, 0836916 , 0836805. Любые мнения, выводы и заключения или
рекомендации, изложенные в этом материале, являются рекомендациями
автор(ы) и не
обязательно отражают взгляды Национального научного фонда. Другой
спонсоры включают Maple, MathCAD, USF, FAMU и MSOE.
На основе работы в
http://mathforcollege.com/nm.
Целостные численные методы лицензированы
под Лицензия Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported.
usf.edu
Этот материал основан на работе, поддержанной Национальным научным фондом.
по гранту # 0126793, 0341468, д. 0717624 , 0836981, 0836916 , 0836805. Любые мнения, выводы и заключения или
рекомендации, изложенные в этом материале, являются рекомендациями
автор(ы) и не
обязательно отражают взгляды Национального научного фонда. Другой
спонсоры включают Maple, MathCAD, USF, FAMU и MSOE.
На основе работы в
http://mathforcollege.com/nm.
Целостные численные методы лицензированы
под Лицензия Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported.Определитель
Определитель квадратной матрицы A размера n x n, обозначаемый |A| или det (A) — это значение, которое можно вычислить из квадратной матрицы. Определитель матрицы имеет различные приложения в области математики, включая использование с системами линейных уравнений, поиском обратной матрицы и исчислением.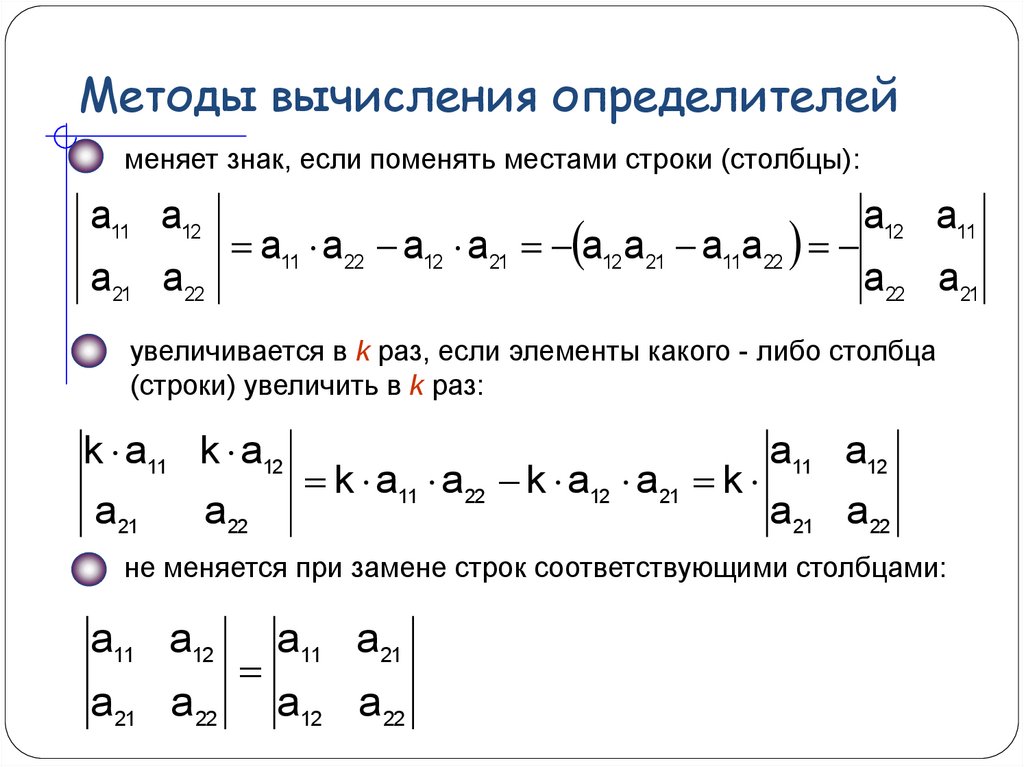 В центре внимания этой статьи находится вычисление определителя. При необходимости обратитесь к странице матричных обозначений для напоминания о некоторых обозначениях, используемых ниже. Существует ряд методов вычисления определителя матрицы, некоторые из которых подробно описаны ниже.
В центре внимания этой статьи находится вычисление определителя. При необходимости обратитесь к странице матричных обозначений для напоминания о некоторых обозначениях, используемых ниже. Существует ряд методов вычисления определителя матрицы, некоторые из которых подробно описаны ниже.
Определитель матрицы 2 × 2
Определитель матрицы 2 × 2 A можно вычислить по формуле:
,
где A: определитель включает в себя рисование рыбы, начиная с верхнего левого входа a. Спускаясь слева направо, умножьте члены a и d и прибавьте произведение. Спускаясь справа налево, умножьте члены b и c и вычтите произведение.
Этот метод и формула могут использоваться только для матриц 2 × 2.
Пример:
Найдите определитель числа:
|A| = (1)(4) – (-3)(2) = 4 + 6 = 10
Обратите внимание, что если определитель матрицы равен 0, у нее нет обратной. Таким образом, может быть полезно найти определитель матрицы, прежде чем пытаться вычислить ее обратную.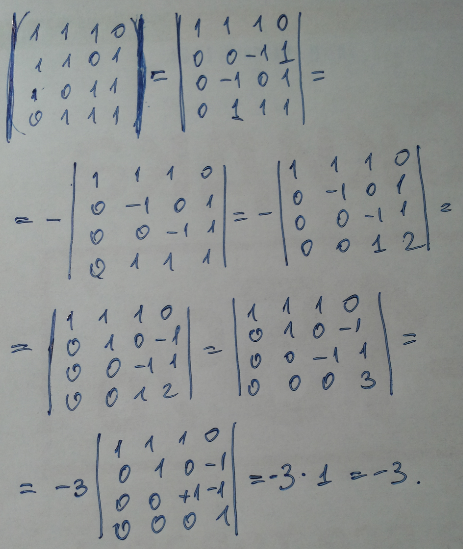
Определители больших матриц
Существует ряд методов, используемых для нахождения определителей больших матриц.
Кофакторное разложение
Кофакторное разложение, иногда называемое разложением Лапласа, дает нам формулу, которую можно использовать для нахождения определителя матрицы A из определителей ее подматриц.
Определим (i,j) -ю -ю подматрицу матрицы A, обозначенную A ij (не путать с ij , записью в i-й строке и j -м -м столбце матрицы A), как — матрица, оставшаяся после удаления строки i th и столбца j th матрицы A. Например, если i = 2 и j = 4, то 2 -я -я строка и 4 -й -й столбец, отмеченные синим цветом, удаляются из матрицы А ниже:
в результате чего получается матрица А , определяется как . Это определение дает нам приведенную ниже формулу для определителя матрицы A:
Будьте осторожны, чтобы не перепутать A ij , (i,j) th подматрицу, с ij , скалярным элементом в я -я -я строка и j-й -й -й столбец A. Эта формула называется «расширением кофактора по i-й -й -й строке». Обратите внимание, что в этой формуле j меняется, а i остается фиксированным. Это представляет собой перемещение по строке i th и добавление и вычитание текущей записи, a ij , умноженной на текущий кофактор C ij в чередующемся порядке.
Эта формула называется «расширением кофактора по i-й -й -й строке». Обратите внимание, что в этой формуле j меняется, а i остается фиксированным. Это представляет собой перемещение по строке i th и добавление и вычитание текущей записи, a ij , умноженной на текущий кофактор C ij в чередующемся порядке.
Аналогично, формула разложения кофактора вниз по столбцу j th имеет вид
Пример
При расширении кофактора очень полезно расширять строки или столбцы, содержащие много нулей, поскольку, если ij = 0, нам не нужно будет вычислять, потому что оно будет просто умножено на 0. Это значительно сокращает количество необходимых шагов. Ниже синим цветом обозначен столбец или строка, по которым мы расширяемся.
Используя формулу для вычисления определителя матрицы 2 × 2:
Учитывая, что матрица квадратная, можно использовать разложение на кофакторы для нахождения определителей больших квадратных матриц, как показано выше. Однако чем больше матрица, тем громоздче вычисление определителя.
Однако чем больше матрица, тем громоздче вычисление определителя.
Исключение по Гауссу
Исключение по Гауссу, также называемое сокращением строк, представляет собой процесс, который «приводит» матрицу к упрощенной форме, что позволяет нам делать такие вещи, как нахождение определителя или решение системы линейных уравнений. Он включает в себя преобразование матрицы с помощью ряда операций над строками в матрицу, с которой легче работать. Чтобы использовать метод исключения Гаусса для нахождения определителя, мы хотим преобразовать данную матрицу либо в верхнюю, либо в нижнюю треугольную матрицу.
Квадратная матрица, в которой все элементы ниже главной диагонали равны 0, называется верхней треугольной матрицей; если все элементы выше главной диагонали равны 0, матрица называется нижней треугольной матрицей:
| Верхняя треугольная матрица | Нижняя треугольная матрица |
Учитывая, что A является квадратной треугольной матрицей, ее определитель является произведением ее диагональных элементов:
Выполнение определенных операций со строками (см. страницу матрицы для справки) над матрицей A изменяет матрицу таким образом, что определитель измененной матрицы В изменяется следующим образом:
страницу матрицы для справки) над матрицей A изменяет матрицу таким образом, что определитель измененной матрицы В изменяется следующим образом:
Пример
Найдите определитель A с помощью исключения Гаусса (при необходимости обратитесь к странице матрицы), чтобы преобразовать A в верхнюю или нижнюю треугольную матрицу.
Этап 1: R 1 + R 3 → R 3 :
На основании iii. выше определитель не изменился.
Шаг 2: Поменяйте местами R2 и R3:
Перестановка двух строк меняет знак определителя (i.), поэтому мы добавили отрицательный знак.
Шаг 3: -¼R 2 + R 3 → R 3
Теперь матрица имеет верхнетреугольную форму, поэтому определитель можно вычислить как произведение ее главной диагонали:
8
Свойства определителей
Ниже приведены некоторые свойства определителей квадратных матриц.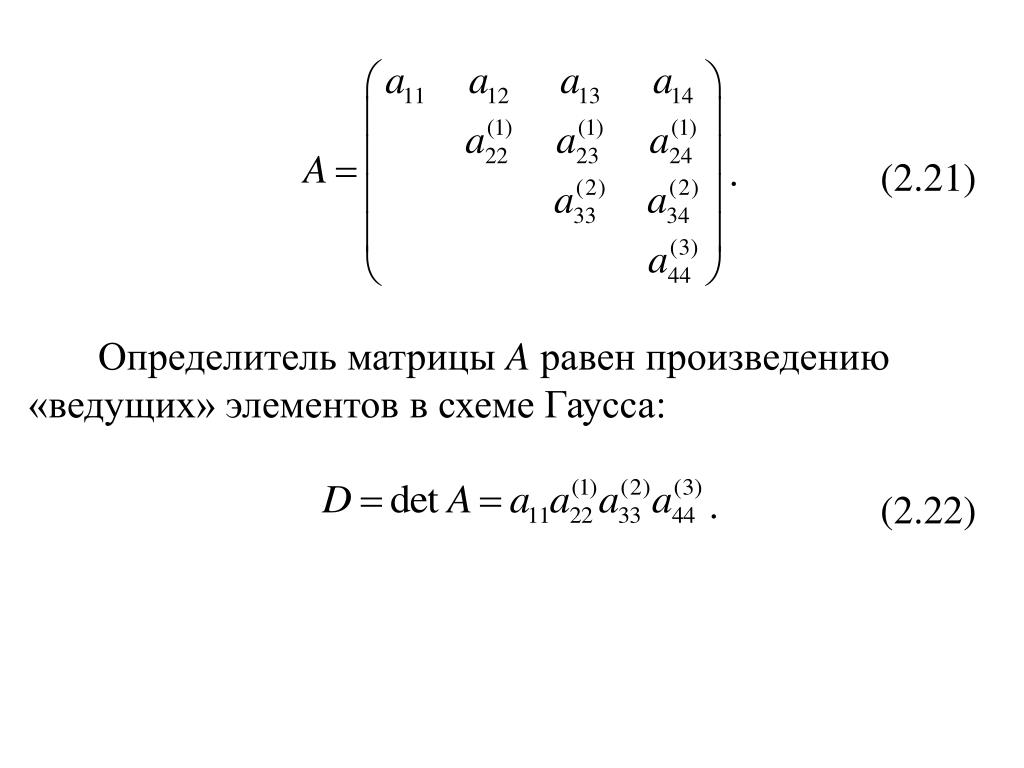
- , где I — единичная матрица
- Квадратная матрица A обратима, только если
- Если одна строка матрицы A кратна другой строке, то , и A называется сингулярной матрицей
Ниже приведены некоторые примеры использования этих свойств.
Имущество i. Для и покажите, что
Свойство ii. Для , покажите, что :
Свойство iii. Для
| и | , |
мы можем показать, что:
Отсюда:
Затем находим det(AB):
Свойство IV. Для единичной матрицы покажите, что .
Свойство v. Поскольку процесс нахождения обратной квадратной матрицы всегда включает множитель , определитель A не может быть равен 0, потому что это сделало бы неопределенным. Для :
Имущество vi. Для , в котором R3 = 2R2,
, что подтверждает свойство vi.