Основные формулы и методические рекомендации по решению задач на законы сохранения в механике
«Лучше знать, даже если знание очень
скоро повлечет за собой гибель, чем
обрести вечную жизнь ценой тусклого
скотского непонимания вселенной, которая
невидимо для нас бурлит во всем своем волшебстве»
Айзек Азимов
В данной теме речь пойдёт о законах сохранения в механике, вспомним некоторые важные формулы, относящиеся к данному разделу, а также дадим несколько советов по решению задач.
Механическая система — это совокупность тел или частей одного и того же тела, взаимодействующих между собой.
Основные вопросы, которые будут затрагиваться при рассмотрении законов сохранения — это импульс и закон сохранения импульса; механическая работа и мощность; а также механическая энергия и закон ее сохранения.
Импульс тела — это векторная физическая величина, равная произведению массы тела на его скорость, а ее направление совпадает с направлением вектора скорости тела
 Импульс тела еще очень часто называют
количеством движения.
Импульс тела еще очень часто называют
количеством движения.На основании определения импульса тела, можно сформулировать и записать второй закон Ньютона в следующем виде: импульс равнодействующей сил, действующих на данное тело, равен изменению импульса тела.
Из такой записи второго закона Ньютона легко заметить, что импульс тела изменяется под действием данной силы одинаково у тел любой массы, если только время действия сил одинаково.
Импульс системы тел равен геометрической сумме импульсов тел системы. Таким образом, импульс системы тел могут изменить только внешние силы.
При этом для системы тел справедлив закон сохранения импульса, согласно которому в замкнутой системе импульс системы тел сохраняется при любых взаимодействиях этих тел.
Реактивное движение – это движение, возникающее при
отделении от тела его части с некоторой относительно тела скоростью.
Механической работе – это скалярная физическая величина, характеризующая процесс перемещения тела под действием силы, и численно равная произведению модуля силы на модуль перемещения и на косинус угла между направлением вектора силы и вектора перемещения.
Далее будет рассматривать работу трех сил: силы тяжести, силы упругости и силы трения.
Если тело перемещается под действием силы тяжести из положения 1 в положение 2, определяемые соответственно высотами h1 и h2, то работа этой силы будет определяться произведением массы перемещаемого тела на ускорение свободного падения и на разницу высот между начальным и конечным положением тела. При этом следует помнить, что сила тяжести является консервативной силой, поэтому ее работа не зависит от формы траектории, по которой перемещается тело, и на замкнутой траектории равна нулю
Если движение тела происходит под действием сил упругости, то работа такой силы будет рассчитываться по формуле
где k — это коэффициент жесткости
пружины, x1 и x2
— ее абсолютное удлинение в положениях один и два соответственно. Так как сила
упругости, так же как и сила трения, является консервативной силой, то
ее работа тоже не зависит от формы траектории и на замкнутой траектории равна
нулю
Так как сила
упругости, так же как и сила трения, является консервативной силой, то
ее работа тоже не зависит от формы траектории и на замкнутой траектории равна
нулю
При рассмотрении работы силы трения следует учитывать то, что ее вектор направлен противоположно вектору перемещения. Поэтому значение работы будет отрицательным и будет определяться произведением модуля силы трения и модуля перемещения. При этом следует помнить, что, в отличие от силы упругости и силы тяжести, сила трения не является консервативной силой. Поэтому ее работа будет зависеть от формы траектории, по которой перемещается тело, и на замкнутой траектории она отлична от нуля.
Механическая энергия – это физическая величина, являющаяся функцией состояния системы и характеризующая способность системы совершать работу.
Механическую энергию делят на два вида — на кинетическую
энергию и потенциальную энергию тела.
Кинетическая энергия — это энергия, которой обладает тело вследствие своего движения. Ее величина зависит от массы тела и его скорости. При этом следует помнить о том, что изменение кинетической энергии тела равно работе равнодействующей всех сил, действующих на тело. Это утверждение называют теоремой о кинетической энергии. Она справедлива независимо от того, какие силы действуют на тело: упругости, трения или тяжести.
Потенциальная энергия
Потенциальную энергию разделяют на два вида:
– Потенциальную энергию тела при гравитационном
взаимодействии. Потенциальная энергия в поле тяготения определяется как
произведение массы тела на ускорение свободного падения и на высоту тела,
относительного выбранного нулевого уровня. А ее изменение, взятое с обратным
знаком, равно работе силы тяжести.
А ее изменение, взятое с обратным
знаком, равно работе силы тяжести.
– Потенциальную энергию упруго деформированного тела.
Следует помнить о том, что тела могут одновременно обладать и кинетической и потенциальной энергией. Поэтому полная механическая энергия тела или системы тел определяется суммой кинетической и потенциальной энергии.

Известно, что для облегчения совершения механической работы издавна используются различные приспособления — простые механизмы. Это устройства, в которых работа совершается только за счет механической энергии. Все простые механизмы служат для преобразования силы.
Наиболее часто встречающимися простыми механизмами являются рычаги и блоки.
Рычаг — это твердое тело, имеющее неподвижную ось вращения, на которое действуют силы, стремящиеся его повернуть вокруг этой оси.
Различают два рода рычага.
К рычагу первого рода относят рычаг, ось вращения которого расположена между точками приложения сил, а сами силы направлены в одну сторону.
А рычаг второго рода — это рычаг, ось вращения которого расположена по одну сторону от точек приложения сил, а сами силы направлены противоположно друг другу.
Блок представляет собой колесо с желобом, укрепленным
в обойме.
У неподвижного блока ось вращения закреплена и при подъеме грузов она не опускается и не поднимается. Такой блок никакого выигрыша в силе не дает, но позволяет менять ее направление.
В отличие от неподвижного блока, подвижный позволяет получить выигрыш в силе в два раза, а его ось вращения поднимается и опускается вместе с грузом.
Следует упомянуть и об условии равновесия рычага, согласно которому рычаг будет находиться в равновесии, если алгебраическая сумма моментов всех сил, действующих на него, равна нулю. При этом принято считать
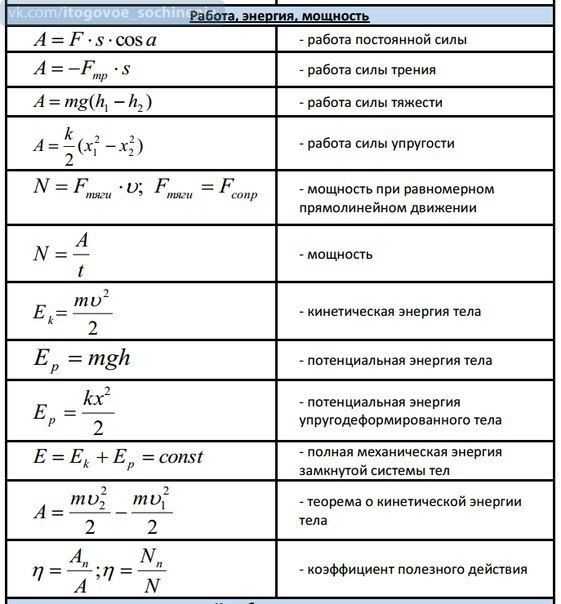
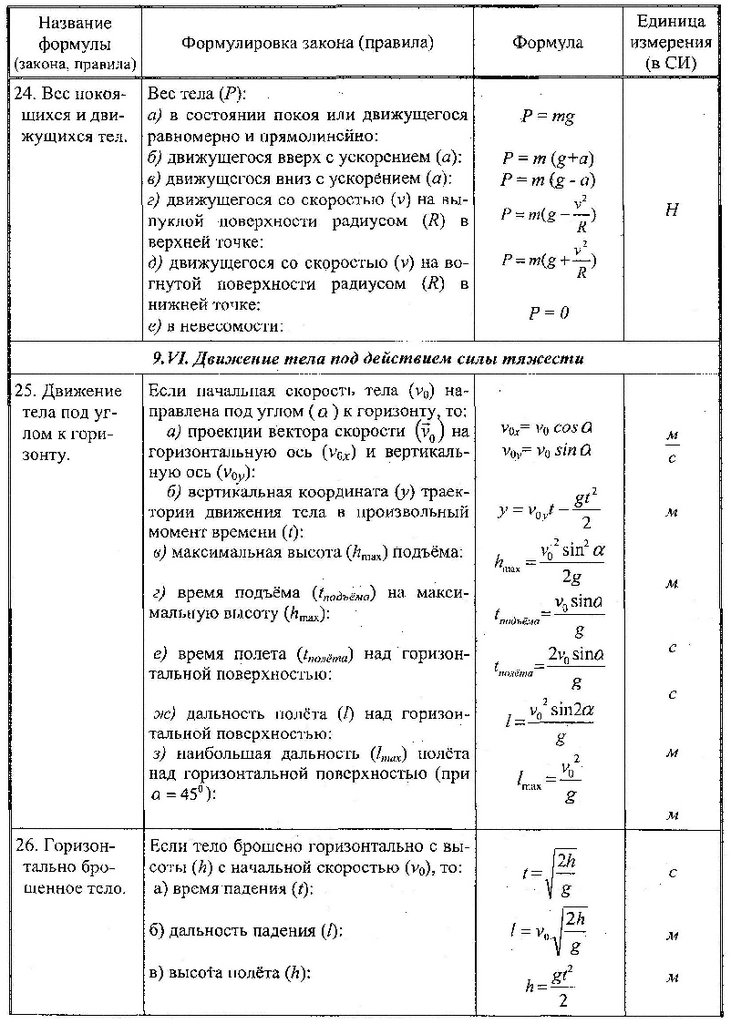
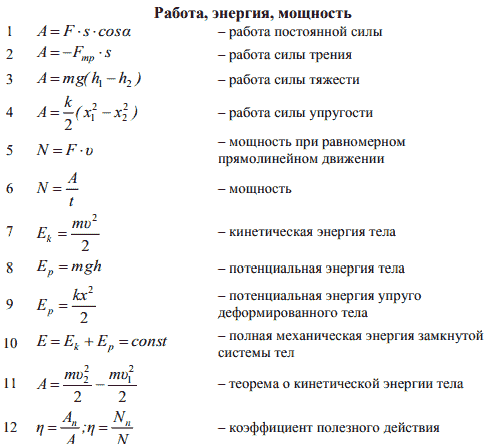
Сведем в таблицу основные формулы законов сохранения энергии.
|
Формула |
Описание формулы |
|
Импульс
тела (количество движения), где m — масса тела,
–
скорость тела. |
|
|
Второй закон Ньютона, где – импульс силы , – время её действия, –изменение импульса тела. |
|
|
Закон сохранения импульса, где – импульсы тел до взаимодействия, – импульсы тел после взаимодействия |
|
|
Работа постоянной силы, sx – модуль перемещения, α — угол между вектором силы и вектором перемещения. |
|
|
Работа силы тяжести, где h1 и h2 — начальная и конечная высота тела относительного нулевого уровня. |
|
|
Работа
силы упругости, где k — жесткость пружины, х1
и х2 — начальное и конечное значение линейной деформации. |
|
|
Работа силы трения. |
|
|
Мощность, где Δt — промежуток времени, за который совершается работа А, Fυ— проекция силы на направление движения, υ — мгновенная скорость. |
|
|
КПД механизма, где Ап – полезная работа, Аз – вся затраченная (совершённая) работа. |
|
|
Кинетическая энергия тела. |
|
|
Теорема о кинетической энергии, где ∆Ек — изменение кинетической энергии, А — работа равнодействующей сил. |
|
|
Потенциальная
энергия тела, поднятого над Землей, где h — высота
тела относительно нулевого уровня. |
|
|
Потенциальная энергия деформированного тела, где x — линейная деформация. |
|
|
Полная механическая энергия системы тел. |
|
|
Закон сохранения механической энергии. |
|
|
Изменение полной механической энергии системы тел, где A1 — работа внешних сил, А2 — работа силы трения. |
|
|
Момент силы, где l — плечо силы. |
|
|
Условие равновесия рычага. |

Методические рекомендации по решению задач на закон сохранения
импульса.
1) Внимательно проанализировав условие задачи, сделать чертеж с указанием на нем для каждого тела векторы импульсов в начале и в конце процесса взаимодействия.
2) Установить, является ли рассматриваемая система замкнутой или нет.
3) Если система замкнута или выполняется одно из следующих условий: а) внешние силы уравновешиваются, б) время взаимодействия мало, в) проекция равнодействующих внешних сил на какое-то направление равна нулю, то следует записать закон сохранения импульса в векторном виде.
4) Если же система незамкнута и не выполняется ни одно из прошлых условий, то записать второй закон Ньютона в импульсной форме, рассматривая движение всех тел системы в одной и той же инерциальной системе отсчета.
5) Спроецировать записанные уравнения на выбранные оси
координат. Их выбирают так, что бы легко было определить геометрические, а по
ним и алгебраические проекции импульсов на соответствующие направления.
6) Если есть необходимость, то следует дополнить систему полученных уравнений кинематическими и динамическими уравнениями движения, ирешить полученную систему относительно искомой величины.
Методические рекомендации по решению задач на закон сохранения и превращения энергии.
1) Делаем чертеж, отметив на нем положения тела, оговоренные в условии задачи (включая начальное).
2) Выбрать нулевой уровень отсчета потенциальной энергии и связываем с ним одну из координатных осей, а другую ось располагаем в плоскости движения тела. Если тело движется под действием силы тяжести, то за нулевой уровень принимаем самое нижнее положение движущегося тела, и записываем формулу для расчета полной механической энергии.
3) Необходимо выяснить, какие силы в рассматриваемой системе являются внешними, внутренними, консервативными и неконсервативными.
5) Для замкнутой системы, в которой действуют только
консервативные силы, записываем закон сохранения энергии. Если в замкнутой
системе действуют силы трения, то необходимо записать закон сохранения и
превращения энергии. А если система незамкнута и внешние силы совершают работу,
то надозаписать формулу для определения изменения механической энергии.
Если в замкнутой
системе действуют силы трения, то необходимо записать закон сохранения и
превращения энергии. А если система незамкнута и внешние силы совершают работу,
то надозаписать формулу для определения изменения механической энергии.
6) Составить по необходимости дополнительные уравнения из динамики или кинематики, или дополнить систему законом сохранения импульса.
7) Решить полученную систему уравнений относительно неизвестной величины, проверить размерность и проанализировать полученный результат.
3. Механика твердого тела Основные формулы
Мерой инертности твердого тела при вращательном движении является момент инерции:
I = Σ mi∙ ri2,
где mi –
элементарная масса i – го
кусочка тела, ri – расстояние этого кусочка от оси
вращения.
Моменты инерции некоторых твердых тел относительно оси, проходящей через их центры масс:
Полый цилиндр I = m ( R12 + R22).
Тонкий обруч I = mR2.
Сплошной цилиндр I = mR2.
Шар I = mR2.
Тонкий стержень I = ml2.
Если ось вращения не проходит через центр масс, для расчета момента инерции используют теорему Штейнера:
I = I0 + ma2,
где I – момент инерции тела относительно
данной оси, I0 – момент инерции этого тела относительно
оси, параллельной данной, и проходящей
через центр масс, m – масса тела, а – расстояние между осями.
Основное уравнение динамики вращательного движения твердого тела: I = M,
где I – момент инерции твердого тела, относительно оси вращения, – его угловое ускорение, М – суммарный момент сил, действующий на тело относительно данной оси.
Момент силы F равен: M = F l,
где l – расстояние от линии, вдоль которой действует сила, до оси вращения.
Момент импульса твердого тела относительно неподвижной оси: L = I ω,
где I – момент инерции твердого тела относительно данной оси, ω – угловая скорость его вращения.
Момент импульса материальной точки относительно неподвижной оси: L = m υ r,
где m – масса частицы, υ – ее скорость, r – расстояние от линии, вдоль которой
движется частица, до данной оси.
В замкнутой системе частиц полный момент импульса не меняется: ΣLi = const.
Кинетическая энергия вращающегося тела:
Ek= ,
где I – момент инерции тела, ω – его угловая скорость.
Кинетическая энергия катящегося тела:
Ek = +,
где m – масса тела, υ0 – скорость поступательного движения центра масс, I0 – момент инерции тела относительно оси, проходящей через центр масс, ω – угловая скорость вращения тела.
Задача 13
Прямой круглый однородный конус имеет массу m и радиус основания R. Найти момент инерции конуса относительно его оси.
Решение
Разобьём
конус на цилиндрические слоиось толщиной dr.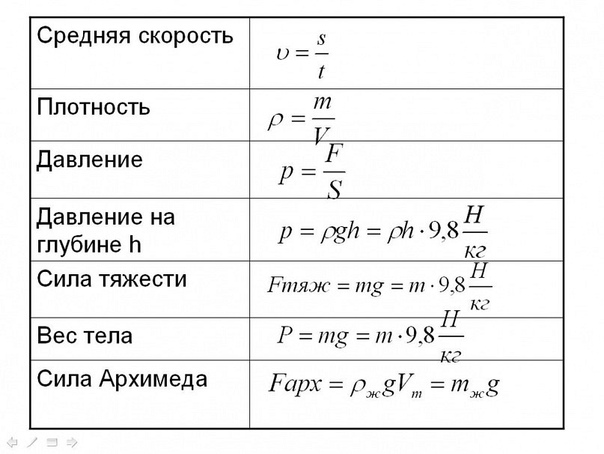 Масса такого слоя
Масса такого слоя
dm = r2dr,
где ρ – плотность материала, из которого изготовлен конус. Момент инерции этого слоя
dI = dm.r2.
Момент инерции всего конуса складывается из моментов инерции всех слоёв:
I = =ρπ r 4dr = ρR5.
Остаётся выразить его через массу всего цилиндра:
m = ==R3,
отсюда ρ = ,
I = = mR2.
Задача 14
Маховое
колесо, имеющее момент инерции 245 кг∙м2,
вращается с частотой 20 об/с. Через минуту
после того, как на колесо перестал
действовать вращающий момент, оно
остановилось. Найти: 1) момент сил трения;
2) число оборотов, которое сделало колесо
до полной остановки после прекращения
действия сил.
Через минуту
после того, как на колесо перестал
действовать вращающий момент, оно
остановилось. Найти: 1) момент сил трения;
2) число оборотов, которое сделало колесо
до полной остановки после прекращения
действия сил.
Решение
При торможении угловое ускорение отрицательно. Найдём его модуль из кинематического соотношения для угловой скорости.
ω 0 = 2 π ν0, ω = 0,
0 = 2 π ν0 – ε t,
отсюда ε = .
Это ускорение обусловлено действием момента сил трения
Mтр = I ε = .
Полный угол поворота при равнозамедленном движении находится из соотношения:
φ =ω0t– ,
φ
=2π N,
ω 0 = 2
π ν0,
ε
=
.
Перепишем соотношения для угла в виде:
2π N = 2 π ν0 t – = 2 π ν0 t – =.
Для нахождения числа оборотов получим:
N = .
Подставив числовые значения, найдём:
Mтр = = 506 Нм,
N = = 600 об.
Задача 15
На барабан радиусом R = 20 см, момент инерции которого равен I = 0,1 кг∙м2, намотан шнур, к которому привязан груз массой m = 0,5 кг. До начала вращения высота груза над полом равна h1 = 1 м. Найти: 1) через какое время груз опустился до пола; 2) кинетическую энергию груза в момент удара о пол; 3) натяжение нити. Трением пренебречь.
Решение
Н
R
T
T
m
h1
а груз действует сила тяжестиmg и сила натяжения шнура Т. Уравнение поступательного движения
груза ma = mg – T.
Уравнение поступательного движения
груза ma = mg – T.
Барабан вращается вокруг неподвижной оси. Его уравнение движения M = I ε,
где М – момент силы натяжения шнура, М = TR, I – момент инерции барабана, ε = – его угловое ускорение.
TR = I .
Выражаем отсюда силу натяжения шнура:
T = I (10)
и подставляем ее в уравнение движения груза:
mg = a(m + ) = am(1 + ).
Получаем ускорение груза:
a = . (11)
Время движения груза можно найти из уравнения:
h1 = ,
t = =
.
В момент удара о пол груз имел скорость:
υ = at = .
Следовательно, его кинетическая энергия:
Ek = =.
Подставив выражение для ускорения (11) в формулу (10), получим: T = = .
Подставив числовые значения, определим искомые величины:
t = = 1,1 c,
Ek = = 0,82 Дж,
T = = 4,1 Н.
Задача 16
Шар
массой m = 1 кг, катящийся без скольжения, ударяется
о стенку и откатывается от нее. Скорость
шара до удара о стенку υ = 10 см/с, после удара 8 см/с. Найти количество
тепла Q,
выделившееся при ударе.
Решение
Кинетическая энергия катящегося тела равна:
Ek = + . (12)
Момент инерции шара I = ,
угловая скорость вращения = .
Подставляем эти величины в формулу (12):
Ek = + = m υ 2.
Количество тепла, выделившегося при ударе, равно разнице его кинетических энергий до и после удара:
Q = Ek1 – Ek2 = m υ12 – m υ22 = m(υ12 – υ22).
Подставив числовые значения, получим:
а =
∙1(100∙10-4 –
64. 10-4)
=
10-4 = 2,25∙10-3 Дж
= 2,52 МДж.
10-4)
=
10-4 = 2,25∙10-3 Дж
= 2,52 МДж.
Задача 17
Найти кинетическую энергию велосипеда, едущего со скоростью υ = 9 км/ч. Масса велосипедиста вместе с велосипедом m = 78 кг, причем на колеса приходится масса m1 = 3 кг. Колеса считать тонкими обручами.
Решение
Кинетическая энергия велосипеда складывается из кинетической энергии поступательного движения и кинетической энергии вращательного движения колес.
Ek = + .
Момент инерции колес, представляющих собой тонкие обручи, равен I = , а угловая скорость вращения = .
Подставляем эти значения в выражение для кинетической энергии: Ek = + = .
Скорость
надо перевести в м/с: υ =
2,5 м/с.
Подстановка числовых значений дает: Ek =253 Дж.
Задача 18
Однородный стержень длиной 85см подвешен на горизонтальной оси, проходящей через верхний конец стержня. Какую наименьшую скорость надо сообщить нижнему концу стержня, чтобы он сделал полный оборот вокруг оси?
Решение
Чтобы стержень смог сделать полный оборот вокруг оси, он должен подняться до вертикального положения В.
Если отсчитывать потенциальную энергию стержня от начального положения А, то в положении В центр масс его поднят на
высоту С2–С1=l – длина стержня. Стержень приобретает потенциальную энергию Еn= mgℓ за счет кинетической энергии,
В которую ему сообщили в
положении А. Если
υ – наименьшая скорость нижнего конца, при которой он сможет сделать полный оборот, то
угловая скорость стержня = .
Момент инерции стержня относительно оси, проходящей через его конец, определятся по теореме Штейнера:
I = m l2 = m= m l2,
где ml2–момент инерции стержня относительно перпендикулярной к нему оси, проходящей через центр масс, – расстояние от центра масс до требуемой оси.
Кинетическая энергия вращательного движения:
Ek = =.= .
По закону сохранения энергии, кинетическая энергия стержня в положении А равна его потенциальной энергии в положении В:
= mgl ,
отсюда υ = .
Подставляем числовые значения: υ = 7 м/с.
Задача 19
Человек массой m1 = 60 кг находится на неподвижной платформе массой m = 100 кг. Какое число оборотов в минуту будет делать платформа, если человек будет двигаться по окружности радиуса 5 м вокруг оси вращения? Скорость движения человека относительно платформы равна 4 км/ч. Радиус платформы 10 м. Считать платформу однородным диском, а человека – точечной массой.
Решение
Первоначально платформа с человеком покоилась,
момент импульса этой системы был равен нулю. Когда человек начнет двигаться по платформе, платформа будет вращаться в противоположном направлении. Если расстояние от человека до оси вращения платформы r, в месте нахождения человека u = r. Таким образом, если человек движется относительно платформы со скоростью
υ,
то относительно земли он будет двигаться
со скоростью υ – r,
его момент импульса относительно оси
платформы L1 = m1(υ – r)r.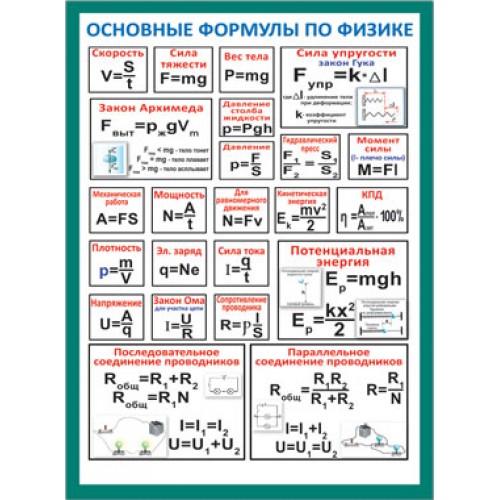 Момент импульса платформы относительно
ее оси:
Момент импульса платформы относительно
ее оси:
L = – I,
где I – момент инерции платформы.
Поскольку платформа представляет собой однородный диск, то ее момент инерции относительно оси, проходящей через центр:
I = mR2.
Запишем закон сохранения момента импульса для данной системы:
O = L1 + L = m1(υ – r) r – mR2,
отсюда можно определить угловую скорость вращения платформы:
= .
Число оборотов платформы в минуту определится из соотношения:
n = 60 = .
Подстановка числового значений дает:
n = = 0,49 об/мин.
Основные формулы по всем разделам физики
Шпаргалка
- формат jpg
- размер 149.
 22 КБ
22 КБ - добавлен 14 января 2011 г.
Здесь представлены самые основные формулы, которые могут
понадобиться студенту при сдачи экзамена по физике. Разделы:
кинематика, динамика, электростатика, квантовая физика, ядерная
физика и другие.
Один этот самый лист.
Похожие разделы
- Абитуриентам и школьникам
- ВНО / ЗНО
- ЗНО по физике
- Абитуриентам и школьникам
- ЕГЭ
- ЕГЭ по физике
- Абитуриентам и школьникам
- ОГЭ / ГИА / ДПА
- ОГЭ / ГИА / ДПА по физике
- Абитуриентам и школьникам
- Физика
- Академическая и специальная литература
- Механика
- Механика жидкостей и газов
- Академическая и специальная литература
- Педагогика
- Методики преподавания
- Методика преподавания физики
- Академическая и специальная литература
- Радиоэлектроника
- Антенная и СВЧ техника
- Электромагнитные поля и волны
- Академическая и специальная литература
- Радиоэлектроника
- Радиофизика
- Учебные планы, программы и нормативная документация
- Для средней школы
- Физика
- Учебные планы, программы и нормативная документация
- Физика
Смотрите также
Шпаргалка
- формат pdf
- размер 1.
 58 МБ
58 МБ - добавлен 21 января 2012 г.
М.: РИОР, 2009. – 32 с. В шпаргалке приведены все основные формулы и определения по физике. Рекомендуется всем изучающим и сдающим физику в школах, средних и высших учебных заведениях.
Билеты и вопросы
- формат docx
- размер 207.3 КБ
- добавлен 22 июня 2011 г.
Страниц101, билетов 47, включает в себя вопросы по квантовому, термодинамическому, механическому разделам физики, примеры решения задач, базовые формулы,
Билеты и вопросы
- формат jpg
- размер 6.
 22 МБ
22 МБ - добавлен 13 марта 2009 г.
Файл содержит 10 билетов за 3 семестр по физики. Билет включает в себя тестовые вопросы по следующим разделам физики: квантовая природа излучения; элементы квантовой физики атомов, молекул и твердых тел; элементы физики атмного ядра и элементарных частиц; 2009 годrn
- формат doc
- размер 127.5 КБ
- добавлен 20 июня 2010 г.
Для всех учебных заведений, содержит оптику, статику, электродинамику, и другие разделы физики в 8 страницах, отличная помощница на экзамене, сделана лично мной, в свое время мне очень помогла.
- формат pdf
- размер 1.95 МБ
- добавлен
06 октября 2011 г.
На 10 страницах приведены всё основные формулы по физике. Может пригодиться студенту при подготовке к экзамену, контрольной работе или просто для освежения памяти по следующим разделам: Кинематика. Динамика. Законы сохранения. Работа и мощность. Статика и гидростатика. Тепловые явления. Электростатика. Постоянный ток. Магнитные явления. Колебания и волны. Оптика.
Шпаргалка
- формат doc
- размер 136.87 КБ
- добавлен 24 января 2009 г.
Формулы по курсу физики: Механике, молекулярной физике и термодинамике, электричеству и магнетизму, колебаниям и волнам, оптике, квантовой природе излучения, элементам квантовой физики атомов, молекул и твёрдых тел, элементам физики атомного ядра и элементарных частиц.
- формат doc
- размер 25.36 КБ
- добавлен 14 июня 2009 г.
Основные формулы на 7 небольших листках(5х8) (от кинематики и динамики до квантовой физики). Формат:rar-doc- 25 Кб содержит формулы по следующим разделам. Кинематика. Динамика. Законы сохранения энергии. Механика жидкостей. Основы МКТ. Термодинамика. Колебания и волны. Электростатика. и др.
Шпаргалка
- формат gif
- размер 1.03 МБ
- добавлен 07 августа 2010 г.
6 изображений, готовых к печати. Распечатать и вырезать готовые странички. Шпоры содержат формулы и основные понятия по всему курсу физики. Оглавление: Кинематика Вращательное движение Динамика Жидкости и газы Закон Гука Основы термодинамики Основы М. К. Т. Тепловое расширение Поверхностное натяжение Законы идеальных газов Тепловые двигатели Влажность Мех. колебания и волны Электростатика Постоянный электр. ток Электромагнетизм Оптика, атомная…
К. Т. Тепловое расширение Поверхностное натяжение Законы идеальных газов Тепловые двигатели Влажность Мех. колебания и волны Электростатика Постоянный электр. ток Электромагнетизм Оптика, атомная…
- формат doc
- размер 27.87 КБ
- добавлен 25 мая 2009 г.
Содержит формулы курса физики. Содержание: Механика. Молекулярная физика. Электричество. Колебания и волны.
Шпаргалка
- формат doc
- размер 194.92 КБ
- добавлен 31 января 2009 г.
Весь теоретический материал по всем разделам физики и формулы. Например, Механика – кинематика. Молекулярная физика. – Тепловые явления. Механическое движение механическим движением называется изменение положения тела (в пространстве) относительно других тел (с течением времени). Относительность движения.
Относительность движения.
Формулы и уравнения машиностроения
Список общих полезных формул и уравнений машиностроения представлен ниже. Список охватывает важные темы машиностроения с основными определениями, уравнениями и формулами.
Подробные основные и фундаментальные концепции машиностроения определены в отдельном разделе.
Напряжение
Сила на единицу площади в твердом теле. Площадь перпендикулярна силе для растягивающего напряжения и параллельна ей для касательного напряжения. Единица измерения: ньютон на квадратный метр (Паскаль).
Деформация
Изменение формы или размера находящегося под напряжением тела, деленное на его первоначальную форму или размер, т.е. «линейная деформация», «деформация сдвига», «объемная деформация».
Модуль упругости Юнга
Мера жесткости материала. Отношение напряжения к деформации в упругой области.
Жесткость
Способность металла и т. д. сопротивляться упругой деформации. Он пропорционален соответствующему модулю упругости.
д. сопротивляться упругой деформации. Он пропорционален соответствующему модулю упругости.
Модуль жесткости
Отношение напряжения сдвига к деформации сдвига в пределах предела упругости.
Формула тепловой деформации
Деформация тела из-за градиента температуры.
Термическое напряжение в составном стержне
Напряжение в теле из-за градиента температуры.
Предел прочности при растяжении
Максимальное напряжение при растяжении, которое материал выдерживает до разрушения.
Момент
Момент силы (или другой векторной величины) относительно точки есть произведение силы и перпендикулярного расстояния от линии действия силы до точки.
Крутящий момент
Алгебраическая сумма пар или моментов внешних сил относительно оси кручения. Также называется «крутящий момент»
Мощность
Скорость выполнения работы. Единица: ватт (Вт).
Мощность
Агмальный крутящий момент
Средняя скорость
Ускорение
Скорость изменения скорости в отношении времени
Линейная скорость
ко времени. Единица измерения: метры в секунду
Угловая скорость
Линейное ускорение
Соотношения между начальной скоростью u, конечной скоростью v, перемещением s, временем t и постоянным ускорением a
Связь между начальной угловой скоростью ω1, конечной угловой скоростью ω2, углом θ, временем t и угловым ускорением a
Импульс Формула
Импульс определяется как изменение импульса, создаваемого любым телом.
Сила
Величина, которая вызывает ускорение тела, измеряемое скоростью изменения количества движения. Единица: ньютон (Н).
Масса
Центростремительное ускорение
Центростремительная сила
Тело, вынужденное двигаться по криволинейной траектории, реагирует с силой (центробежной силой), направленной от центра кривизны. Она равна и противоположна силе, отклоняющей тело от прямой линии, называемой «центростремительной силой». Оба равны массе, умноженной на «центростремительное ускорение».
Она равна и противоположна силе, отклоняющей тело от прямой линии, называемой «центростремительной силой». Оба равны массе, умноженной на «центростремительное ускорение».
Плотность
Масса единицы объема вещества. Единицей является килограмм на кубический метр.
Выполненная работа
Эффективность
Безразмерная мера совершенства единицы оборудования, например. для двигателя отношение вырабатываемой мощности к расходу энергии израсходованного топлива, выраженное в долях или процентах.
Мощность
Скорость выполнения работы. Единица: ватт (Вт).
Потенциальная энергия и кинетическая энергия
Способность тела совершать работу. Типы: кинетические, потенциальные, напорные, химические, электрические и т. д.
Kinetic energy of rotation
Frictional force
Angle of repose
Efficiency of screw jack
SHM Equations
Simple pendulum
Compound pendulum
Коэффициент силы
Коэффициент движения
Эффективность
Температура по Кельвину
Количество тепловой энергии
Новая длина
Новые уравнения площади поверхности
Новый том
Давление
В точке в жидкости. все направления. То есть это скалярная величина; например в цилиндре с поршнем давление P равно силе, действующей на поршень, деленной на площадь цилиндра.
все направления. То есть это скалярная величина; например в цилиндре с поршнем давление P равно силе, действующей на поршень, деленной на площадь цилиндра.
Абсолютное давление
Абсолютное давление = избыточное давление + атмосферное давление
Мацентрическая высота, GM
Уравнение Бернулли
Коэффициент разряда
Скорость фактического поток
Формула уравнения характеристического газаЯ надеюсь, что этот список формул и уравнений машиностроения окажется полезным для наших уважаемых читателей. Мы добавим больше формул в этот список в будущем. Любые рекомендации и замечания приветствуются в разделе комментариев.
Механика материалов для чайников Шпаргалка
Студенты и профессиональные инженеры, изучающие механические науки, знают, что механика материалов имеет дело с напряжением в объектах — от определения напряжения в определенной точке до определения напряжения в колоннах.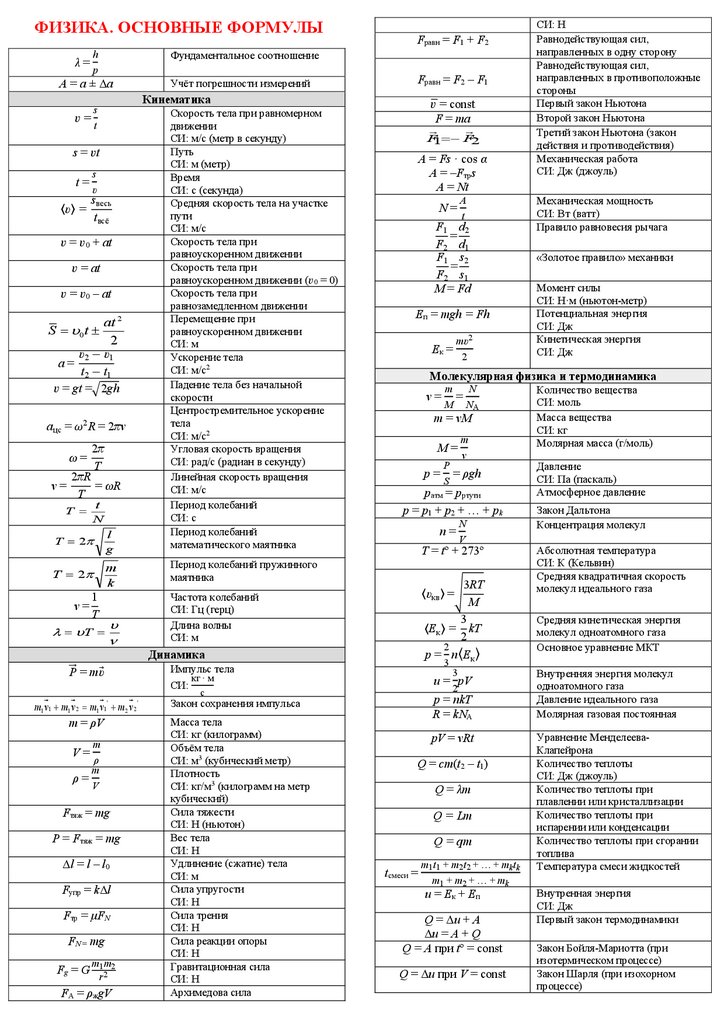 Знание того, как применять некоторые важные законы и графические представления, может помочь вам с легкостью решать сложные задачи механики материалов.
Знание того, как применять некоторые важные законы и графические представления, может помочь вам с легкостью решать сложные задачи механики материалов.Формулы для расчета напряжения в точке
При работе с механикой материалов выбор правильной формулы для расчета напряжения в данной точке может быть затруднен. Нормальные напряжения и напряжения сдвига применяются в самых разных приложениях, каждое приложение напряжения имеет свою собственную формулу расчета. Наиболее распространенные типы напряжений, с которыми вы имеете дело в базовой механике материалов, делятся на несколько основных категорий:0003
Осевое натяжение: A НЕТТО равно общей площади поперечного сечения за вычетом любых возможных отверстий.
Тонкостенные сосуды под давлением: Существуют два напряжения: осевое напряжение вдоль оси элемента и кольцевое (или радиальное) напряжение, которое возникает по касательной к радиусу поперечного сечения.
 Эти напряжения основаны на манометрическом давлении p внутри сосуда высокого давления.
Эти напряжения основаны на манометрическом давлении p внутри сосуда высокого давления.Для цилиндрических сосудов под давлением используйте следующую пару формул:
Для сферических сосудов под давлением используйте следующую формулу:
Напряжения при изгибе: Для симметричных сечений в плоскости XY используйте эту формулу:
(момент относительно оси x ) (момент относительно оси y )
Напряжение сдвига при изгибе: Вот формула для расчета напряжения сдвига при изгибе:
Напряжение сдвига при кручении: Используйте эту формулу, чтобы найти напряжение сдвига при кручении:
Расчет напряжений в колоннах
Знание того, как вычислить напряжение в колонне ( сжимающий элемент ), является базовым элементом знаний в области механики материалов. Определите, является ли колонна «короткой, тонкой или промежуточной», рассчитав коэффициент максимальной гибкости ( KL/r ). Для коротких колонн напряжение элемента при сжатии является основной формулировкой осевого напряжения. Для промежуточных и тонких колонн можно использовать обобщенное уравнение потери устойчивости Эйлера. Приблизительные коэффициенты гибкости для стальных колонн указаны в скобках.
Для коротких колонн напряжение элемента при сжатии является основной формулировкой осевого напряжения. Для промежуточных и тонких колонн можно использовать обобщенное уравнение потери устойчивости Эйлера. Приблизительные коэффициенты гибкости для стальных колонн указаны в скобках.
Короткие колонны : Коэффициент гибкости ( KL/r < 50).
Тонкие колонны: Коэффициент гибкости ( KL/r ≥200). В расчетах тонких колонн используется модуль упругости ( E ).
Промежуточные колонны: Коэффициент гибкости (50 ≤ KL/r < 200). В формуле для промежуточных колонн используется тангенциальный модуль упругости ( E т ).
Использование круга Мора для нахождения главных напряжений и углов
Любой, кто занимается механическими науками, вероятно, знаком с кругом Мора ‘ s — полезным графическим методом для нахождения главных напряжений и деформаций в материалах. Круг Мора также сообщает вам главные углы (ориентации) главных напряжений без необходимости подставлять угол в уравнения преобразования напряжения.
Круг Мора также сообщает вам главные углы (ориентации) главных напряжений без необходимости подставлять угол в уравнения преобразования напряжения.
Начиная с элемента напряжения или деформации в плоскости XY, постройте сетку с нормальным напряжением по горизонтальной оси и напряжением сдвига по вертикали. (График положительного напряжения сдвига внизу.) Затем просто выполните следующие действия:
Постройте вертикальные координаты грани V( σ xx , τ xy ).
Постройте горизонтальные координаты H( σ yy , –τ xy ).
Вы используете противоположный знак напряжения сдвига из шага 1, потому что напряжения сдвига на горизонтальных гранях создают пару, которая уравновешивает (или действует в противоположном направлении) напряжения сдвига на вертикальных гранях.
Нарисуйте линию диаметра, соединяющую точки V (из шага 1) и H (из шага 2).
Нарисуйте круг вокруг диаметра из шага 3.
Окружность должна проходить через точки V и H, как показано здесь.
Вычислите положение нормального напряжения для центральной точки окружности ( C ).
Вычислить радиус ( R ) окружности.
Определить главные напряжения σ P1 и σ P2 .
Вычислить главные углы Θ P1 и Θ P2 .
Вы также можете напрямую использовать уравнения (вместо круга Мора) для определения преобразованных напряжений под любым углом:
To construct a Mohr’s circle for strain or to use the transformation equations, substitute ε xx for σ xx , ε yy for σ yy , и (0,5) γ xy для τ xy в предыдущем
Использование обобщенного закона Гука для напряжений и деформаций
В механике материалов Гука ‘ s закон представляет собой отношение, связывающее напряжения с деформациями. Хотя первоначальный закон Гука был разработан для одноосных напряжений, вы также можете использовать обобщенную версию закона Гука для связи напряжений и деформаций в трехмерных объектах. В конце концов, закон Гука помогает связать напряжения (которые основаны на нагрузках) с деформациями (которые основаны на деформациях).
Хотя первоначальный закон Гука был разработан для одноосных напряжений, вы также можете использовать обобщенную версию закона Гука для связи напряжений и деформаций в трехмерных объектах. В конце концов, закон Гука помогает связать напряжения (которые основаны на нагрузках) с деформациями (которые основаны на деформациях).
Для трехмерного напряженного состояния нормальная деформация в заданном направлении (например, x ) является функцией напряжений во всех трех ортогональных направлениях (обычно декартово x – , y-, и z- направления), как показано этим уравнением:
, где E — модуль упругости, а ν — коэффициент Пуассона для материала. Для одноосного напряжения два напряжения в уравнении равны нулю. Для условия двухосного напряжения одно из напряжений в этом уравнении равно нулю.
Обобщенное соотношение для закона Гука для сдвига в плоскости XY можно представить как
Расчет деформаций от нагрузок
Деформации измеряют реакцию конструкции на нагрузку, и расчет этой деформации является важной частью механики материалов. Расчеты деформации бывают самыми разнообразными, в зависимости от типа нагрузки, вызывающей деформацию. Осевые деформации вызываются осевыми нагрузками, а углы закручивания – скручивающими нагрузками. Кривая упругости изгибаемых элементов на самом деле представляет собой дифференциальное уравнение.
Расчеты деформации бывают самыми разнообразными, в зависимости от типа нагрузки, вызывающей деформацию. Осевые деформации вызываются осевыми нагрузками, а углы закручивания – скручивающими нагрузками. Кривая упругости изгибаемых элементов на самом деле представляет собой дифференциальное уравнение.
В следующем списке показаны некоторые из наиболее часто используемых выражений деформации, с которыми вы сталкиваетесь в механике материалов:
Осевая деформация:
Угол закручивания для кручения:
Двойное интегрирование для определения деформации балок:
Можно аппроксимировать y ( x ), уравнение кривой упругости как функцию x, следующим дифференциальным уравнением:
Сначала необходимо найти обобщенное уравнение момента M во всех точках вдоль балки как функцию положения x . Решите это уравнение, дважды проинтегрировав и применив граничные условия для определения констант интегрирования (известных перемещений опор ( y ) и поворотов ( θ ).
 Помните,
Помните,
Об этой статье
Эта статья из книги:
- Механика материалов для чайников,
Об авторе книги:
Джеймс Х. Аллен III, PE, доктор философии, доцент кафедры гражданского строительства и зарегистрированный профессиональный инженер. Его области специализации включают проектирование конструкций, численный анализ и контроль ошибок, а также проектирование стали. Он также является автором книги «Статика для чайников ».Эту статью можно найти в категории:
- Профессии, технологии и инженерия Карьера,
Физика:Список уравнений классической механики
Краткое описание : нет
Классическая механика — раздел физики, используемый для описания движения макроскопических объектов. [1] Это наиболее известная из физических теорий. Понятия, которые он охватывает, такие как масса, ускорение и сила, широко используются и известны. [2] Субъект основан на трехмерном евклидовом пространстве с фиксированными осями, называемом системой отсчета. Точка совпадения трех осей известна как начало определенного пространства. [3]
[1] Это наиболее известная из физических теорий. Понятия, которые он охватывает, такие как масса, ускорение и сила, широко используются и известны. [2] Субъект основан на трехмерном евклидовом пространстве с фиксированными осями, называемом системой отсчета. Точка совпадения трех осей известна как начало определенного пространства. [3]
Классическая механика использует множество уравнений, а также другие математические концепции, связывающие различные физические величины друг с другом. К ним относятся дифференциальные уравнения, многообразия, группы Ли и эргодическая теория. [4] В этой статье дается обзор наиболее важных из них.
В этой статье перечислены уравнения ньютоновской механики, более общую формулировку классической механики (которая включает лагранжеву и гамильтонову механики) см. в аналитической механике.
Содержание
- 1 Классическая механика
- 1.1 Масса и инерция
- 1.
 2 Производные кинематические величины
2 Производные кинематические величины - 1.3 Производные динамические величины
- 1.4 Общие определения энергии
- 1.5 Обобщенная механика
- 2 Кинематика
- 3 Динамика
- 3.1 Прецессия
- 4 Энергия
- 5 Уравнения Эйлера для динамики твердого тела
- 6 Общее плоскостное движение
- 6.1 Движение центральной силы
- 7 Уравнения движения (с постоянным ускорением)
- 8 преобразований системы координат Галилея
- 9 Механические генераторы
- 10 См. также
- 11 Примечания
- 12 Каталожные номера
Классическая механика
Масса и инерция
| Количество (общепринятое название/я) | (общий) символ/с | Определение уравнения | единицы СИ | Размер | |
|---|---|---|---|---|---|
| Линейная, поверхностная, объемная массовая плотность | λ или μ (особенно в акустике, см. ниже) для Linear, σ для поверхности, ρ для объема. ниже) для Linear, σ для поверхности, ρ для объема. | [математика]\displaystyle{ m = \int \lambda \mathrm{d} \ell}[/math] [математика]\displaystyle{ m = \iint \sigma \mathrm{d} S}[/math] [математика]\displaystyle{ m = \iiint \rho \mathrm{d} V }[/math] | кг м − n , 9N \mathbf{r}_\mathrm{i} m_i }[/math] Континуум массы вокруг оси [math]\displaystyle{ x_i }[/math]: | кг м | [М][Л] |
| Центр масс | r ком (обозначения различаются) | i th момент массы [math]\displaystyle{ \mathbf{m}_\mathrm{i} = \mathbf{r}_\mathrm{i} m_i }[/math] Дискретные массы: Массовый континуум: | м | [л] | |
| 2-корпус уменьшенной массы | м 12 , μ Пара масс = м 1 и м 2 | [math]\displaystyle{ \mu = \left (m_1m_2 \right)/\left ( m_1 + m_2 \right) }[/math] | кг | [М] | |
| Момент инерции (MOI) | я | Дискретные массы: [math]\displaystyle{ I = \sum_i \mathbf{m}_\mathrm{i} \cdot \mathbf{r}_\mathrm{i} = \sum_i \left | \mathbf{r}_\mathrm{i} \right | ^2 м}[/математика] 92 \rho\mathrm{d}V}[/math] | кг м 2 | [M][L] 2 |
Производные кинематические величины
Кинематические величины классической частицы: масса m , положение r , ускорение 7 0 90 0 007 v 90 007 v 90 007
| Количество (обычное имя/имена) | (общий) символ/с | Определение уравнения | единицы СИ | Размер 94 }[/математика] | м с −4 | [L][T] −4 |
|---|---|---|---|---|---|---|
| Угловая скорость | ω | [math]\displaystyle{\boldsymbol{\omega} = \mathbf{\hat{n}} \left (\mathrm{d} \theta /\mathrm{d} t \right)}[/math] | рад с −1 | [T] −1 | ||
| Угловое ускорение | α | [math]\displaystyle{\boldsymbol{\alpha} = \mathrm{d} \boldsymbol{\omega}/\mathrm{d} t = \mathbf{\hat{n}} \left ( \mathrm{d} ^2 \тета / \mathrm{d} t^2 \right ) }[/math] 93 \справа )}[/math] | рад с −3 | [T] −3 |
Производные динамические величины
Угловые моменты классического объекта.
Слева: собственный “спиновый” угловой момент S – действительно орбитальный угловой момент объекта в каждой точке,
справа: внешний орбитальный угловой момент L вокруг оси,
9: тензор момента инерции I и угловая скорость ω ( L не всегда параллельна ω ) [6]дно: импульс p p 08 9008 и его радиальное положение
Полный угловой момент (спин + орбитальный) равен Дж .
| Количество (обычное имя/имена) | (общий) символ/с | Определение уравнения | единицы СИ | Размер | |
|---|---|---|---|---|---|
| Импульс | р | [математика]\displaystyle{ \mathbf{p}=m\mathbf{v} }[/math] | кг м с −1 | [M][L][T] −1 | |
| Сила | Ф | [математика]\displaystyle{ \mathbf{F} = \mathrm{d} \mathbf{p}/\mathrm{d} t}[/math] | Н = кг м с −2 | [M][L][T] −2 | |
| Импульс | Дж 9{t_2} \mathbf{F}\mathrm{d} t }[/math] | кг м с −1 | [M][L][T] −1 | ||
| Момент количества движения относительно точки положения r 0 , | л , дж , с | [math]\displaystyle{ \mathbf{L} = \left ( \mathbf{r} – \mathbf{r}_0 \right ) \times \mathbf{p} }[/math] В большинстве случаев мы можем установить r 0 = 0 , если частицы вращаются вокруг осей, пересекающихся в одной точке. | кг м 2 с −1 | [M][L] 2 [T] −1 | |
| Момент силы относительно точки положения r 0 , Крутящий момент | τ , М | [math]\displaystyle{ \boldsymbol{\tau} = \left ( \mathbf{r} – \mathbf{r}_0 \right ) \times \mathbf{F} = \mathrm{d} \mathbf{L} /\mathrm{d} т}[/math] | Н·м = кг·м 2 с −2 9{t_2} \boldsymbol{\tau}\mathrm{d} t}[/math] | кг м 2 с −1 | [M][L] 2 [T] −1 |

Общие определения энергии
| Количество (обычное название/я) | (общий) символ/с | Определение уравнения | единицы СИ | Размер |
|---|---|---|---|---|
| Механическая работа под действием равнодействующей силы | Ш | [математика]\displaystyle{ W = \int_C \mathbf{F} \cdot \mathrm{d} \mathbf{r} }[/math] | Дж = Н·м = кг·м 2 с −2 | [M][L] 2 [T] −2 |
| Работа выполнена НА механической системе, Работа выполнена BY | Вт НА , Вт ПО | [math]\displaystyle{ \Delta W_\mathrm{ON} = – \Delta W_\mathrm{BY} }[/math] | Дж = Н·м = кг·м 2 с −2 | [M][L] 2 [T] −2 |
| Потенциальная энергия | φ, Φ, U, V, E р | [математика]\displaystyle{ \Delta W = – \Delta V }[/math] | Дж = Н·м = кг·м 2 с −2 | [M][L] 2 [T] −2 |
| Механическая мощность | П | [математика]\displaystyle{ P = \mathrm{d}E/\mathrm{d}t}[/math] | Вт = Дж с −1 | [М][Л] 2 [Т] −3 |
Каждая консервативная сила имеет потенциальную энергию. Следуя двум принципам, можно последовательно присвоить U неотносительное значение:
Следуя двум принципам, можно последовательно присвоить U неотносительное значение:
- Везде, где сила равна нулю, ее потенциальная энергия также равна нулю.
- Всякий раз, когда сила работает, потенциальная энергия теряется.
Обобщенная механика
| Количество (обычное название/я) | (общий) символ/с | Определение уравнения | единицы СИ | Размер |
|---|---|---|---|---|
| Обобщенные координаты | кв, кв | зависит от выбора | зависит от выбора | |
| Обобщенные скорости | [математика]\displaystyle{ \dot{q},\dot{Q} }[/math] | [математика]\displaystyle{ \dot{q}\equiv \mathrm{d}q/\mathrm{d}t}[/math] | зависит от выбора | зависит от выбора |
| Обобщенные импульсы | р, р | [математика]\displaystyle{ p = \partial L /\partial \dot{q} }[/math] | зависит от выбора | зависит от выбора |
| Лагранжиан | л | [математика] \ displaystyle { L (\ mathbf {q}, \ mathbf {\ dot {q}}, t) = T (\ mathbf {\ dot {q}}) – V (\ mathbf {q}, \ mathbf {\ точка {q}}, т)} [/ математика] , где [math]\displaystyle{ \mathbf{q}=\mathbf{q}(t)}[/math] и p = p ( t ) — векторы обобщенных координат и импульсов как функции времени | Дж | [M][L] 2 [T] −2 |
| Гамильтониан | Н | [математика] \ displaystyle { H (\ mathbf {p}, \ mathbf {q}, t) = \ mathbf {p} \ cdot \ mathbf {\ dot {q}} – L (\ mathbf {q}, \ mathbf {\ точка {q}}, т)} [/ математика] | Дж | [M][L] 2 [T] −2 |
| Действие, главная функция Гамильтона 9{t_2} L(\mathbf{q},\mathbf{\dot{q}},t) \mathrm{d}t}[/math] | Дж с | [M][L] 2 [T] −1 |
Кинематика
В следующих определениях вращения угол может быть любым углом относительно указанной оси вращения. Обычно используется θ , но это не обязательно должен быть полярный угол, используемый в полярных системах координат. Единичный осевой вектор
Обычно используется θ , но это не обязательно должен быть полярный угол, используемый в полярных системах координат. Единичный осевой вектор
- [математика]\displaystyle{\mathbf{\шляпа{n}} = \mathbf{\шляпа{e}}_r\times\mathbf{\шляпа{e}}_\theta}[/math]
определяет ось вращения, [math]\displaystyle{ \scriptstyle \mathbf{\hat{e}}_r }[/math] = единичный вектор в направлении r , [math]\displaystyle{ \scriptstyle \mathbf{\hat{e}}_\theta}[/math] = единичный вектор, касательный к углу.
| Перевод | Вращение | ||
|---|---|---|---|
| Скорость | Среднее значение:
Мгновенное:
| Угловая скорость
Вращающееся твердое тело: Ускорение | Среднее значение:
92} }[/math] Вращающееся твердое тело:
|
| Рывок | Среднее значение:
Мгновенное:
Вращающееся твердое тело:
|
Динамика
| Перевод | Вращение | ||
|---|---|---|---|
| Импульс | Momentum – это “количество переводов”
Для вращающегося твердого тела:
| Угловой момент Угловой момент – это “число вращения”:
и перекрестное произведение является псевдовектором, т. В общем случае I является тензором порядка 2, его компоненты см. выше. Точка · указывает на тензорное сокращение. | |
| Сила и второй закон Ньютона | На систему в центре масс действует результирующая сила, равная скорости изменения количества движения:
Для ряда частиц уравнение движения одной частицы i имеет вид: [7]
, где p I = момент частицы I , F IJ , F IJ , F 83333333333333333333333333333333333333333333333338. | Крутящий момент Крутящий момент τ также называется моментом силы, потому что это аналог силы вращения: [8]
Для твердых тел второй закон Ньютона для вращения принимает ту же форму, что и для поступательного движения:
Аналогично, для ряда частиц уравнение движения для одной частицы 92} \\ \end{align} }[/math] Для постоянной массы становится;
| Ротатум Вращение Ρ также называют моментом янки, потому что это вращательный аналог янки:
|
| Импульс | Импульс – это изменение импульса:
Для постоянной силы F :
| Угловой импульс – это изменение углового момента:
Для постоянного крутящего момента τ :
|
 е. если r и p поменяны местами в направлении (отрицательном), L нет.
е. если r и p поменяны местами в направлении (отрицательном), L нет. 3333333333333333333333333333333333333333333333333333333333333333333333338. и на частица j , и F E = результирующая внешняя сила (из-за любого агента, не являющегося частью системы). Частица i не действует сама на себя.
3333333333333333333333333333333333333333333333333333333333333333333333338. и на частица j , и F E = результирующая внешняя сила (из-за любого агента, не являющегося частью системы). Частица i не действует сама на себя.Прецессия
Задана угловая скорость прецессии волчка. по:
по:
- [math]\displaystyle{ \boldsymbol{\Omega} = \frac{wr}{I\boldsymbol{\omega}} }[/math]
, где w — вес вращающегося маховика.
Энергия
Механическая работа, совершаемая внешним агентом над системой, равна изменению кинетической энергии системы:
- Общая теорема о работе-энергии (перенос и вращение)
Работа, совершаемая W внешним агентом, который прикладывает силу F (при r ) и крутящий момент τ к объекту, путь C :
- [математика]\displaystyle{ W = \Delta T = \int_C \left (\mathbf{F} \cdot \mathrm{d} \mathbf{r} + \boldsymbol{\tau} \cdot \mathbf{n } {\ mathrm {d} \ theta} \ right ) } [/ math] 92 }[/math]
где r 2 и r 1 — коллинеарные координаты свободного конца пружины в направлении растяжения/сжатия, а k — жесткость пружины.
Уравнения Эйлера для динамики твердого тела
Эйлер также разработал законы движения, аналогичные законам Ньютона, см. Законы движения Эйлера. Они расширяют сферу действия законов Ньютона на твердые тела, но по сути такие же, как и выше. Новое уравнение, сформулированное Эйлером: [10]
Законы движения Эйлера. Они расширяют сферу действия законов Ньютона на твердые тела, но по сути такие же, как и выше. Новое уравнение, сформулированное Эйлером: [10]
- [математика]\displaystyle{\mathbf{I} \cdot \boldsymbol{\alpha} + \boldsymbol{\omega} \times \left (\mathbf{I} \cdot \boldsymbol{\ omega} \right ) = \boldsymbol{\tau} }[/math]
где I – тензор момента инерции.
Общее плоское движение
Здесь можно использовать предыдущие уравнения для плоского движения: следствия количества движения, углового момента и т. д. могут быть немедленно получены путем применения приведенных выше определений. Для любого объекта, движущегося по любой траектории в плоскости,
- [math]\displaystyle{ \mathbf{r}= \mathbf{r}(t) = r\mathbf{\hat{e}}_r }[/math]
следующие общие результаты применимы к частица.
| Кинематика | Динамика | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Должность [math]\displaystyle{\mathbf{r} =\mathbf{r}\left ( r,\theta, t \right ) = r \mathbf{\hat{e}}_r}[/math] | ||||||||||||||||||||||||||||||||
Скорость
| Импульс
Угловой момент [математика] \ displaystyle { \ mathbf {L} = m \ mathbf {r} \ times \ left (\ mathbf {\ hat {e}} _r \ frac {\ mathrm {d} r} {\ mathrm {d} t } + r \ omega \ mathbf {\ hat {e}} _ \ theta \ right) } [/ math] | |||||||||||||||||||||||||||||||
Ускорение
, где снова м — момент массы, а сила Кориолиса равна
Кориолисово ускорение и сила также могут быть записаны:
| 92}\mathbf{F}(\mathbf{r}) }[/math]||||||||||||||||||||||||||||||||
 Если ускорение непостоянно, то необходимо использовать общие уравнения исчисления, приведенные выше, которые можно найти путем интегрирования определений положения, скорости и ускорения (см. Выше).
Если ускорение непостоянно, то необходимо использовать общие уравнения исчисления, приведенные выше, которые можно найти путем интегрирования определений положения, скорости и ускорения (см. Выше).| Линейное движение | Угловое движение |
|---|---|
| [математика]\displaystyle{v = v_0+at}[/math] 92 }[/математика] |
Преобразования системы отсчета Галилея
Для классической (галилео-ньютоновской) механики законом преобразования одной инерциальной или ускоряющей (включая вращение) системы отсчета (система отсчета, движущаяся с постоянной скоростью, включая нулевую) в другую является преобразование Галилея.
Нештрихованные величины относятся к положению, скорости и ускорению в одном кадре F; числа со штрихом относятся к положению, скорости и ускорению в другой системе отсчета F’, движущейся с поступательной скоростью В или угловая скорость Ω относительно F. Напротив, F движется со скоростью (— В или — Ω ) относительно F’. Аналогичная ситуация и с относительными ускорениями.
Аналогичная ситуация и с относительными ускорениями.
| Движение объектов | Инерционные рамы | Ускоряющие рамы |
|---|---|---|
| Перевод V = Постоянная относительная скорость между двумя инерциальными системами отсчета F и F’. | Относительное положение [math]\displaystyle{ \mathbf{r}’ = \mathbf{r} + \mathbf{V}t }[/math] Относительная скорость | Относительные ускорения [math]\displaystyle{ \mathbf{a}’ = \mathbf{a} + \mathbf{A} }[/math] Кажущиеся/фиктивные силы |
| Вращение Ω = Постоянная относительная угловая скорость между двумя системами отсчета F и F’. | Относительное угловое положение [math]\displaystyle{ \theta’ = \theta + \Omega t}[/math] Относительная скорость | Относительные ускорения [math]\displaystyle{ \boldsymbol{\alpha}’ = \boldsymbol{\alpha} + \boldsymbol{\Lambda} }[/math] Кажущиеся/фиктивные моменты |
| Преобразование любого вектора T во вращающуюся систему отсчета [math]\displaystyle{ \frac{{\rm d}\mathbf{T}’}{{\rm d}t} = \frac{{\rm d}\mathbf{T}}{{\rm d }t} – \boldsymbol{\Omega} \times \mathbf{T} }[/math] | ||
Механические генераторы
SHM, DHM, SHO и DHO относятся к простому гармоническому движению, затухающему гармоническому движению, простому гармоническому осциллятору и затухающему гармоническому осциллятору соответственно.
| Физическое положение | Номенклатура | 92 } }[/математика]
|---|
| Физическое положение | Номенклатура | Уравнения |
|---|---|---|
| Линейная недемпфированная нефорсированная ШО |
| |
| Низкоамплитудный угловой SHO |
| [математика] \ displaystyle { \ omega = \ sqrt {\ frac {\ kappa} {I}} } [/ math] |
| Простой маятник с малой амплитудой |
|
| Физическое положение | Номенклатура | Уравнения |
|---|---|---|
| СГМ энергия |
| Потенциальная энергия [математика]\displaystyle{ U = \frac{m}{2} \left ( x \right )^2 = \frac{m \left( \omega A \right )^2}{2} \ cos^2(\omega t + \phi) }[/math] Максимальное значение при x = A: 9{-бт/м} }[/math] |
См.
 также
также- Список физических формул
- Определяющее уравнение
- Определяющее уравнение (физическая химия)
- Основное уравнение
- Механика
- Оптика
- Электромагнетизм
- Термодинамика
- Акустика
- Исаак Ньютон
- Список уравнений волновой теории
- Список релятивистских уравнений
- Список уравнений гидромеханики
- Список уравнений гравитации
- Список уравнений электромагнетизма
- Список уравнений фотоники
- Список уравнений квантовой механики
- Список уравнений в физике ядра и элементарных частиц
Примечания
- ↑ Mayer, Sussman & Wisdom 2001, p. xiii
- ↑ Berkshire & Kibble 2004, с. 1
- ↑ Berkshire & Kibble 2004, с. 2
- ↑ Арнольд 1989, с. в
- ↑ “ Раздел: Моменты и центр масс “. http://www.ltcconline.net/greenl/courses/202/multipleIntegration/MassMoments.