
гироскоп. Как узнать, есть ли на телефоне гироскоп
Что такое гироскоп?
Гироскоп – это устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета.
Гироскопы представляют собой вращающиеся с высокой частотой твердые тела.
Простейший пример гироскопа – юла (волчок).
Гироскопический прибор – это техническое устройство, в котором в качестве основного элемента используется быстро вращающийся ротор, закрепленный таким образом, чтобы его ось вращения поворачивалась. Гироскопические приборы широко используются для решения навигационных задач либо в системах ручного и автоматического управления движением различных объектов.
Появление термина гироскоп.
Термин «гироскоп» впервые был использован Жаном Фуко, французским физиком, механиком и астрономом, в 1852 году в докладе во Французской Академии Наук. Доклад Жана Бернара Леона Фуко был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве.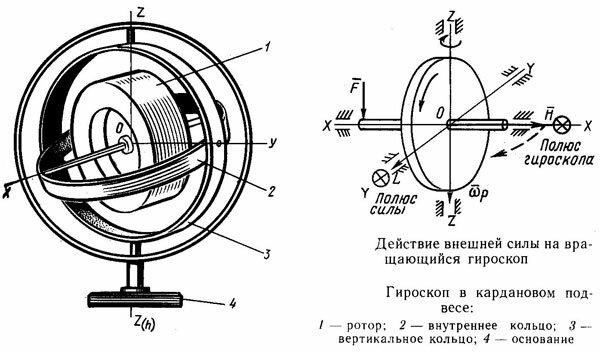
История создания гироскопа.
До изобретения гироскопа люди использовали различные методы определения направления в пространстве. Вначале люди начали ориентироваться визуально по удалённым предметам, в частности, по Солнцу.
Уже в древности появились первые приборы, основанные на гравитации: отвес и уровень.
В средние века в Китае был изобретён компас, использующий магнетизм Земли.
В Древней Греции были созданы астролябия и другие приборы, основанные на измерениях относительно положения звёзд.
Первые прототипы современного гироскопа начали появляться в начале 19-го века.
Так, устройство, которое можно назвать гироскопом, изобрёл Иоганн Боненбергер, который в 1817 году опубликовал описание своего изобретения. А французский математик Пуассон, уже в 1813 году, упоминает Иоганна Боненбергера как изобретателя подобного устройства. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе.
В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском.
Джонсон придумал гироскоп с вращающимся диском.
В 1852 году французский учёный Жан Фуко усовершенствовал подобное устройство, и дал ему название «гироскоп».
Именно Жан Фуко придумал название «гироскоп». Можно отметить, что Фуко, как и Боненбергер, использовал в гироскопе карданов подвес.
На фотографии гироскоп, изобретённый Жаном Фуко, изготовленный французским механиком Дюмолен-Фроментом, в 1852 году.
Главным свойством карданова подвеса является то, что если в него закрепить вращающееся тело, то оно будет сохранять направление оси вращения независимо от ориентации самого подвеса. Это свойство нашло применение в гироскопах и гироскопических приборах.
Начало использования гироскопов.
В первых гироскопах скорость вращения быстро снижалась из-за силы трения. Во второй половине 19-го века было предложено для разгона и поддержания скорости вращения гироскопа использовать электродвигатель.
Преимуществом гироскопа и гироскопических приборов перед другими более древними приборами, использовавшимися при измерениях, явилось то, что он правильно работает в сложных условиях. Например, плохая видимость, различные колебания, тряска, и электромагнитные воздействия.
Например, плохая видимость, различные колебания, тряска, и электромагнитные воздействия.
Впервые на практике гироскопический прибор был применён в 1880-х годах австрийским инженером Л.Обри для стабилизации курса торпеды.
Следующее применение гироскопа в технике также относится к морскому делу. Гироскоп использовали при разработке морского указателя курса – гирокомпаса. Прототип современного гирокомпаса первым создал Герман Аншютц-Кэмпфе (запатентован в 1908), вскоре подобный прибор построил американский инженер Э. Сперри (запатентован в 1911).
В 20-м веке гироскопы стали широко использоваться на самолётах, вертолетах, ракетах, подводных лодках, вместо компаса или совместно с ним.
Гироскопы. Использование гироскопов.
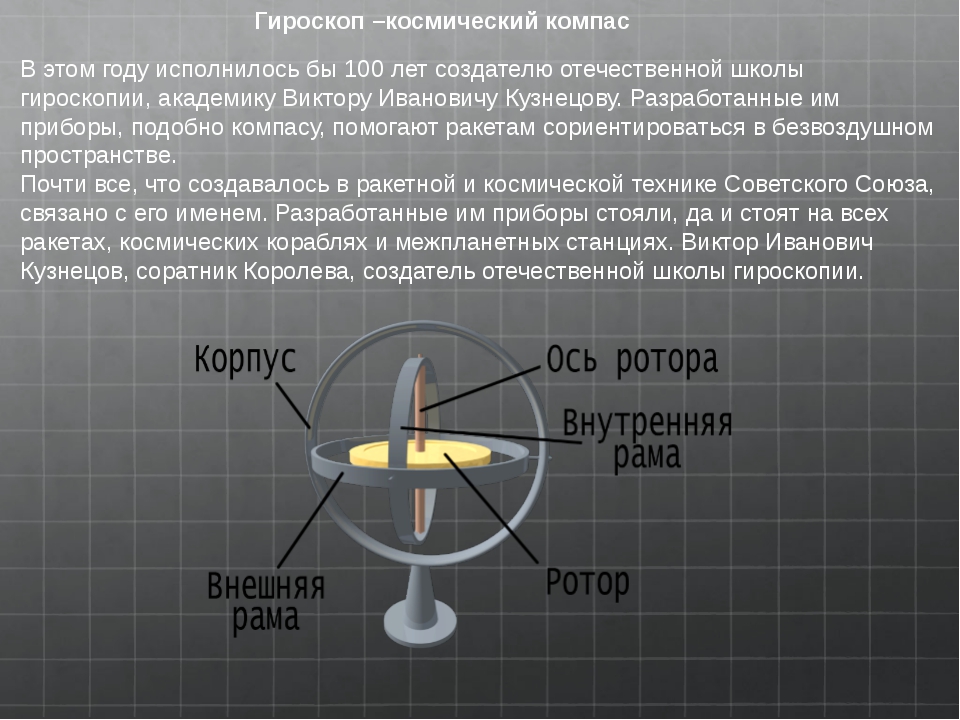
Свойства гироскопа используются в приборах – гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес.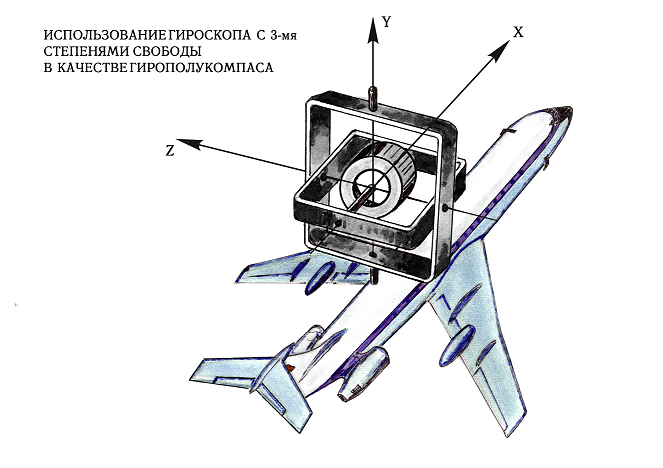 Такие гироскопы имеют 3 степени свободы.
Такие гироскопы имеют 3 степени свободы.
Гироскопы, у которых центр масс совпадает с центром подвеса O , называются астатическими, в противном случае – статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас и т. п.), так и в системах ориентации и стабилизации различных аппаратов.
Развитие гироскопических приборов.
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.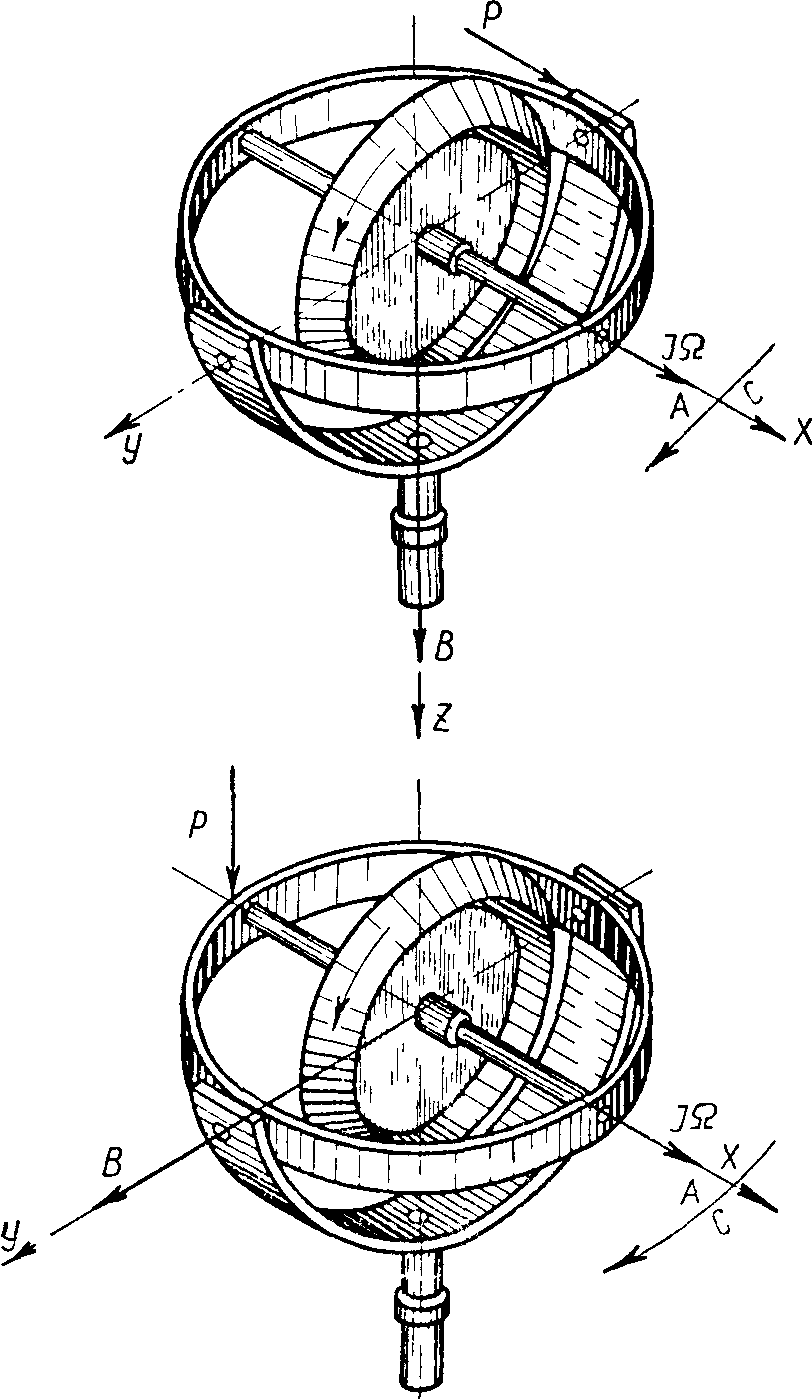
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как сверхсекретная.
Сегодня созданы достаточно надежные и точные гироскопические системы, удовлетворяющие большой круг потребителей.
Современные гироскопические приборы работают и обеспечивают высокую точность необходимых измерений в любом месте – под землёй, под водой, в космосе.
Гироскоп. Что такое гироскоп? История гироскопа. Принцип работы гироскопа.
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)
До изобретения гироскопа человечество использовало различные методы определения направления в пространстве.
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы :
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Механические гироскопы
Среди механических гироскопов выделяется
Впервые это свойство использовал Фуко в г. для экспериментальной демонстрации вращения Земли . Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
Прецессия механического гироскопа.
то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы
Вибрационные гироскопы – устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» – так как принцип их действия основан на эффекте действия силы Кориолиса , как и у роторных гироскопов.
Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где – скорость и – угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как: , а положение грузика в плоскости – . Внеплоскостное движение , вызываемое поворотом гироскопа равно:
где: – масса колеблющегося грузика. – коэффициент жёсткости пружины в направлении, перпендикулярном плоскости. – величина поворота в плоскости перпендикулярно движению колеблющегося грузика.Разновидности
Гироскоп на МАКС-2009
Оптические гироскопы
Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка , открытом в 1913 году . Теоретически он объясняется с помощью СТО . Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта . В то время как в неинерциальной системе она может отличаться от c . При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча.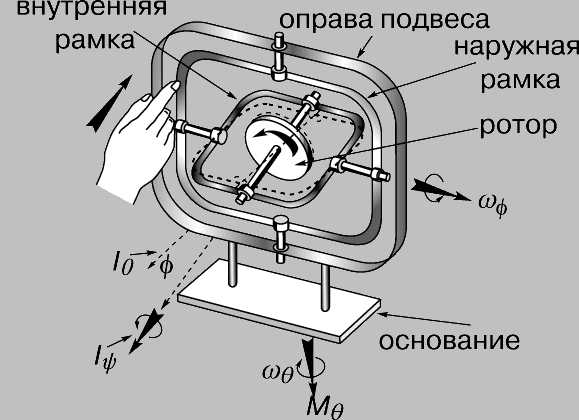 Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади , охватываемой путём распространения световых волн в интерферометре :
Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади , охватываемой путём распространения световых волн в интерферометре :
где -разность времён прихода лучей, выпущенных в разных направлениях, – площадь контура, – угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500-1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный :
где – длина волны.
Применение гироскопов в технике
Схема простейшего механического гироскопа в карданном подвесе
Свойства гироскопа используются в приборах – гироскопах, основной частью которых является быстро вращающийся ротор , который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес . Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА” , BB” и CC” , пересекающихся в центре подвеса О , который остаётся по отношению к основанию A неподвижным.
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов .
Перспективы развития гироскопического приборостроения
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер .
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС , выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения . Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS . При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников.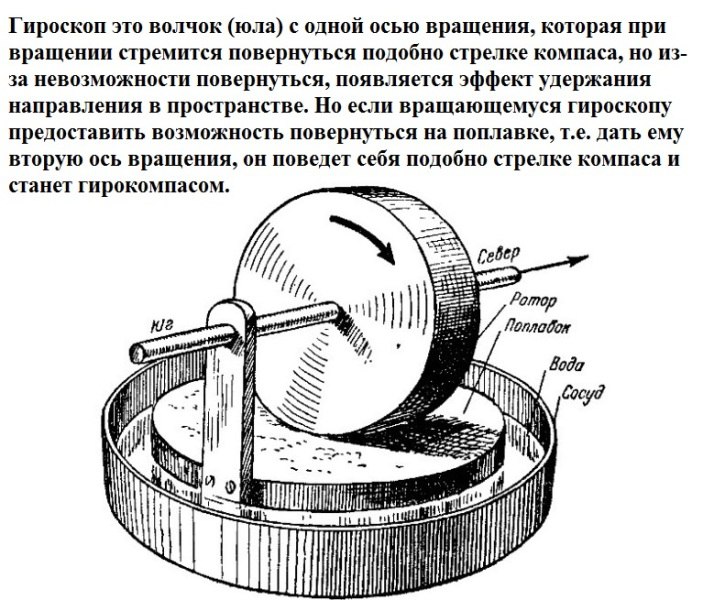 Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте – под землёй, под водой, в космосе.
Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте – под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование гироскопа в смартфонах и игровых приставках
IPhone 4 с гироскопом внутри
Значительное удешевление производства МЭМС -гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках .
Также гироскоп стал применяться в управляющих игровых контроллерах , таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii . В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора : акселерометр и гироскоп . Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo – Wii Remote для игровой приставки Wii , но в нём используется только трёхмерный акселерометр . Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах : Sixaxis и Wii MotionPlus , кроме акселерометра , был использован дополнительный пространственный сенсор – гироскоп .
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо , волчок (юла) и модели вертолетов.
Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
Кроме того, существует спортивный гироскопический тренажёр .
См. также
Примечания
- Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde , vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
- Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l”École Polytechnique , vol.
 9, pages 247-262. В интернете: http://www.ion.org/museum/files/File_2.pdf
9, pages 247-262. В интернете: http://www.ion.org/museum/files/File_2.pdf - Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- Walter R. Johnson (January 1832) “Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, ” The American Journal of Science and Art , 1st series, vol. 21, no. 2, pages 265-280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177-178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- Wagner JF, “The Machine of Bohnenberger, ” The Institute of Navigation.
 В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24 - L. Foucault (1852) “Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, ” Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris) , vol. 35, pages 424-427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
- (1) Julius Plücker (September 1853) “Über die Fessel’sche rotationsmachine, ” Annalen der Physik , vol. 166, no. 9, pages 174-177; (2) Julius Plücker (October 1853) “Noch ein wort über die Fessel’sche rotationsmachine, ” Annalen der Physik , vol. 166, no. 10, pages 348-351; (3) Charles Wheatstone (1864) “On Fessel’s gyroscope, ” Proceedings of the Royal Society of London , vol. 7, pages 43-48. В интернете: .
Гироскопы
– это скрытый мозг, поддерживающий на курсе самолёты в воздухе, спутники на орбите и суда в океане. Первые гироскопы для практического применения начали выпускаться в 1910 г. фирмой Sperry Gyroscope Co. Это были судовые стабилизаторы и так называемый «искусственный горизонт», который показывал пилотам высоту полёта. После смерти изобретателя и основателя фирмы Элмера Сперри в 1930 г. многочисленные дочерние фирмы продолжили дело и воплотили 400 его патентов в автоматизированные системы навигации и наведения военного назначения, предназначенные для использования в самолётах, ракетах, бомбах, спутниках и космических аппаратах. Сегодня гироскопы, как неотъемлемая часть навигационной системы, устанавливаются на роботах, в антиблокировочных системах (предотвращающих пробуксовывание колёс автомобиля), на автомобильных приборных досках, в космических летательных аппаратах и космических телескопах, марсоходах и системах индивидуального передвижения космонавтов в открытом космосе. Работа гироскопа базируется на двух принципах: любая вращающаяся масса стремится сохранить положение своей оси вращения в пространстве.
Первые гироскопы для практического применения начали выпускаться в 1910 г. фирмой Sperry Gyroscope Co. Это были судовые стабилизаторы и так называемый «искусственный горизонт», который показывал пилотам высоту полёта. После смерти изобретателя и основателя фирмы Элмера Сперри в 1930 г. многочисленные дочерние фирмы продолжили дело и воплотили 400 его патентов в автоматизированные системы навигации и наведения военного назначения, предназначенные для использования в самолётах, ракетах, бомбах, спутниках и космических аппаратах. Сегодня гироскопы, как неотъемлемая часть навигационной системы, устанавливаются на роботах, в антиблокировочных системах (предотвращающих пробуксовывание колёс автомобиля), на автомобильных приборных досках, в космических летательных аппаратах и космических телескопах, марсоходах и системах индивидуального передвижения космонавтов в открытом космосе. Работа гироскопа базируется на двух принципах: любая вращающаяся масса стремится сохранить положение своей оси вращения в пространстве. Вращающийся гироскоп поддерживает постоянной ориентацию спутника относительно Земли, что обеспечивает надёжную связь с ним. Вращающаяся масса сопротивляется действию силы, стремящейся изменить её положение. В середине 1900-х гг. на судах ставили гигантские гироскопы, массой несколько тонн, которые вращались с помощью двигателей. Эти устройства выравнивали положение судна на волнах, поддерживая его всё время «мачтами вверх». Свободно вращающийся гироскоп под воздействием внешней силы отклоняется не в направлении этой силы, а перпендикулярно ей – прецессирует. Прецессия возникает, например, если крыло самолёта, в котором установлен гироскоп, начинает крениться. Тогда пилот на приборной доске видит угол поперечного крена (wing angle ), что очень важно, если нет никаких ориентиров. Кроме того, он видит продольный крен (pitch of the plane ), от носа до хвоста. Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолёта), то может функционировать как автопилот, т.
Вращающийся гироскоп поддерживает постоянной ориентацию спутника относительно Земли, что обеспечивает надёжную связь с ним. Вращающаяся масса сопротивляется действию силы, стремящейся изменить её положение. В середине 1900-х гг. на судах ставили гигантские гироскопы, массой несколько тонн, которые вращались с помощью двигателей. Эти устройства выравнивали положение судна на волнах, поддерживая его всё время «мачтами вверх». Свободно вращающийся гироскоп под воздействием внешней силы отклоняется не в направлении этой силы, а перпендикулярно ей – прецессирует. Прецессия возникает, например, если крыло самолёта, в котором установлен гироскоп, начинает крениться. Тогда пилот на приборной доске видит угол поперечного крена (wing angle ), что очень важно, если нет никаких ориентиров. Кроме того, он видит продольный крен (pitch of the plane ), от носа до хвоста. Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолёта), то может функционировать как автопилот, т.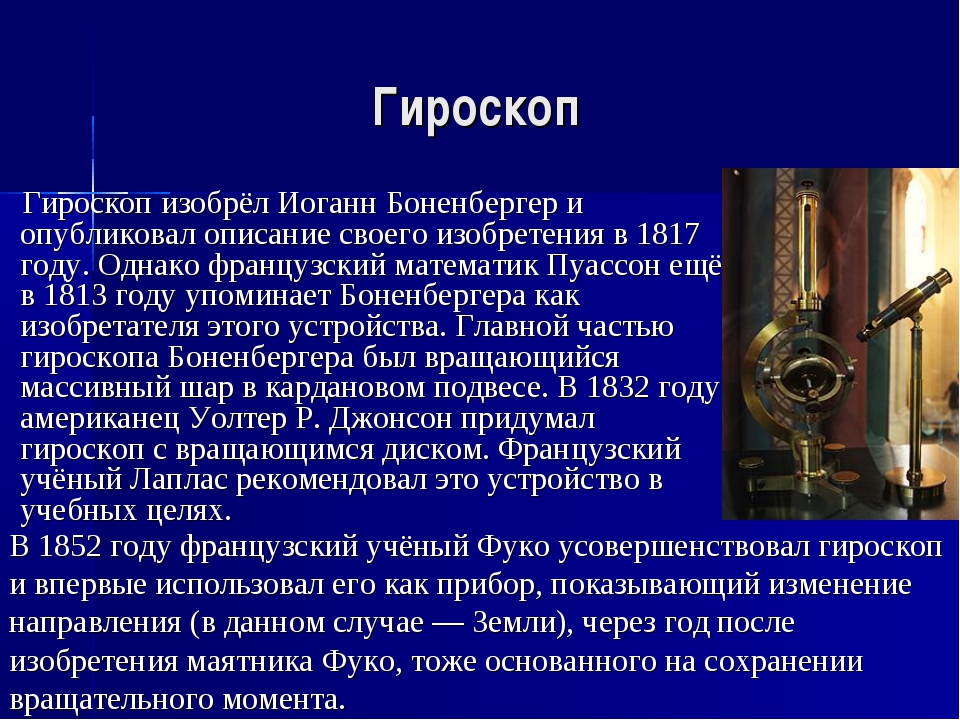 е. автоматически поддерживать самолёт на курсе. Механических гироскопов сейчас всё меньше и меньше. В 1980-х гг. появились кольцевые лазерные и световодные гироскопы, которые точнее отслеживают изменения параметров полёта по изменению интерференционной картины. Кроме того, они легче и компактнее. Стоит лазерный гироскоп 3–4 тыс. долл. Путём микромеханической обработки кварца или кремния делают также крошечные гироскопы, чувствующие параметры вибраций. Они не такие точные, но зато могут производиться в больших количествах, как интегральные схемы, и довольно дёшевы – примерно по 20 долл. за штуку. Применяются такие гироскопы в бытовых устройствах и, в частности, в автомобилях.
е. автоматически поддерживать самолёт на курсе. Механических гироскопов сейчас всё меньше и меньше. В 1980-х гг. появились кольцевые лазерные и световодные гироскопы, которые точнее отслеживают изменения параметров полёта по изменению интерференционной картины. Кроме того, они легче и компактнее. Стоит лазерный гироскоп 3–4 тыс. долл. Путём микромеханической обработки кварца или кремния делают также крошечные гироскопы, чувствующие параметры вибраций. Они не такие точные, но зато могут производиться в больших количествах, как интегральные схемы, и довольно дёшевы – примерно по 20 долл. за штуку. Применяются такие гироскопы в бытовых устройствах и, в частности, в автомобилях.
В микромеханическом гироскопе кремниевое кольцо свободно подвешено на изогнутых кремниевых пружинках, которые одним концом крепятся к неподвижной центральной шайбе. Когда на управляющие электроды подаётся напряжение, то под действием электростатических сил кольцо начинает вибрировать, возникает стоячая волна, которую отслеживают считывающие электроды.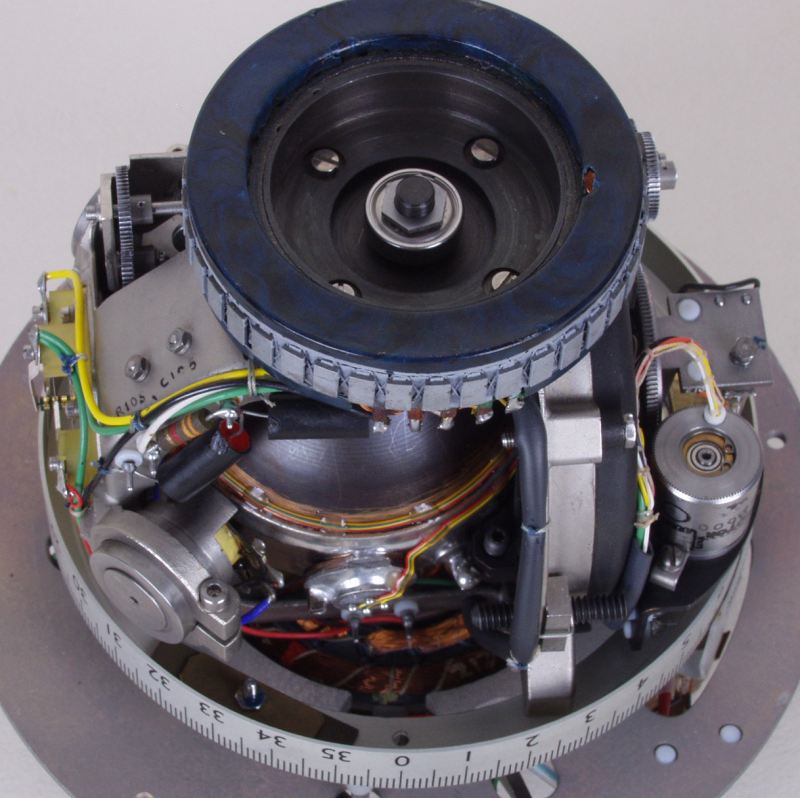 Если кольцо под действием внешних сил поворачивается, стоячая волна искажается, и сигнал о направлении поворота поступает на считывающие электроды. По величине искажений можно судить о скорости поворота.
Если кольцо под действием внешних сил поворачивается, стоячая волна искажается, и сигнал о направлении поворота поступает на считывающие электроды. По величине искажений можно судить о скорости поворота.
В кольцевом лазерном гироскопе при подаче напряжения на два анода и катод газ возбуждается и генерируются две световые волны одной и той же частоты, распространяющиеся в противоположных направлениях. На детекторе возникает интерференционная картина. Если кольцо поворачивается под действием внешней силы, то одна волна распространяется немного быстрее другой, и по изменению интерференционной картины можно судить о скорости и направлении поворота. Чтобы частоты пучков слегка различались исходно, миниатюрный моторчик трясёт лазер.
В гироскопе с динамической подстройкой железный ротор приводится во вращение двигателем постоянного тока и вращается в подшипниках с постоянной скоростью. Если гироскоп поворачивается под действием внешней силы, ротор начинает прецессировать, что вызывает изменение магнитного поля и появление сигнала, который несёт информацию о направлении и скорости поворота. Этот сигнал также воздействует на магниты подстройки, которые компенсируют прецессию, не допуская тем самым, чтобы ротор упёрся в кожух.
Этот сигнал также воздействует на магниты подстройки, которые компенсируют прецессию, не допуская тем самым, чтобы ротор упёрся в кожух.
Знаете ли вы, что?..
Стабильность показаний (уход) гироскопа зависит от трения в подшипниках и температуры. Наилучший пока результат – 0,01 град/ч, что позволяет навести снаряд на цель с точностью 1 морская миля (1,6 км) после часа полёта. Во время афганской войны бомбы наводились гироскопами с уходом 1 град/ч. Гироскопы в антиблокировочных автомобильных устройствах имеют уход 3600 град/ч, но вполне удовлетворяют потребителя, поскольку они задействованы очень короткое время, всего несколько секунд.
В 1914 г. на аэрошоу в Париже Лоуренс Сперри, сын изобретателя гироскопа, продемонстрировал действие этого устройства: он провёл свой биплан на бреющем полёте, убрав руки с ручек управления, а его механик в это время прогуливался по крылу. Позднее отец и сын изобрели устройство, названное ими автоматическим пилотом, которое позволило Вилли Посту осуществить в 1933 г. первый кругосветный полёт. Автопилоты на судах часто называют «Железный Майк» (Metal Mike ), признавая его невидимым членом экипажа.
первый кругосветный полёт. Автопилоты на судах часто называют «Железный Майк» (Metal Mike ), признавая его невидимым членом экипажа.
Законы США запрещают экспорт высокоточных гироскопов. В 1999 г. был арестован китайский бизнесмен, который пытался приобрести световодный гироскоп, предназначенный для наведения «умных» бомб. В 1995 г. ныряльщики подняли такой гироскоп со дна Тигра вблизи Багдада и передали его СССР, где в то время разрабатывались системы наведения баллистических ракет.
Scientific American, 2002, June, p. 96–97.
Сокр. пер. с англ. Н.Д.Козловой
Гироскоп в переводе с древнегреческого языка означает смотреть вращение – это устройство, которое способно измерить у связанного с ним предмета изменение углов его ориентации относительно инерциальных систем координат и которое основано на законе сохранения момента импульса. Гироскопы от количества степеней свободы подразделяются на двухстепенные и на трехстепенные. А по своему принципу действия гироскопы могут делиться на механические гироскопы и оптические гироскопы. Также принято гироскопы делить по режиму их действия на указатели направления и датчики угловой скорости. Зачастую одни устройства могут функционировать в различных режимах и это зависит от типа управления.
Также принято гироскопы делить по режиму их действия на указатели направления и датчики угловой скорости. Зачастую одни устройства могут функционировать в различных режимах и это зависит от типа управления.
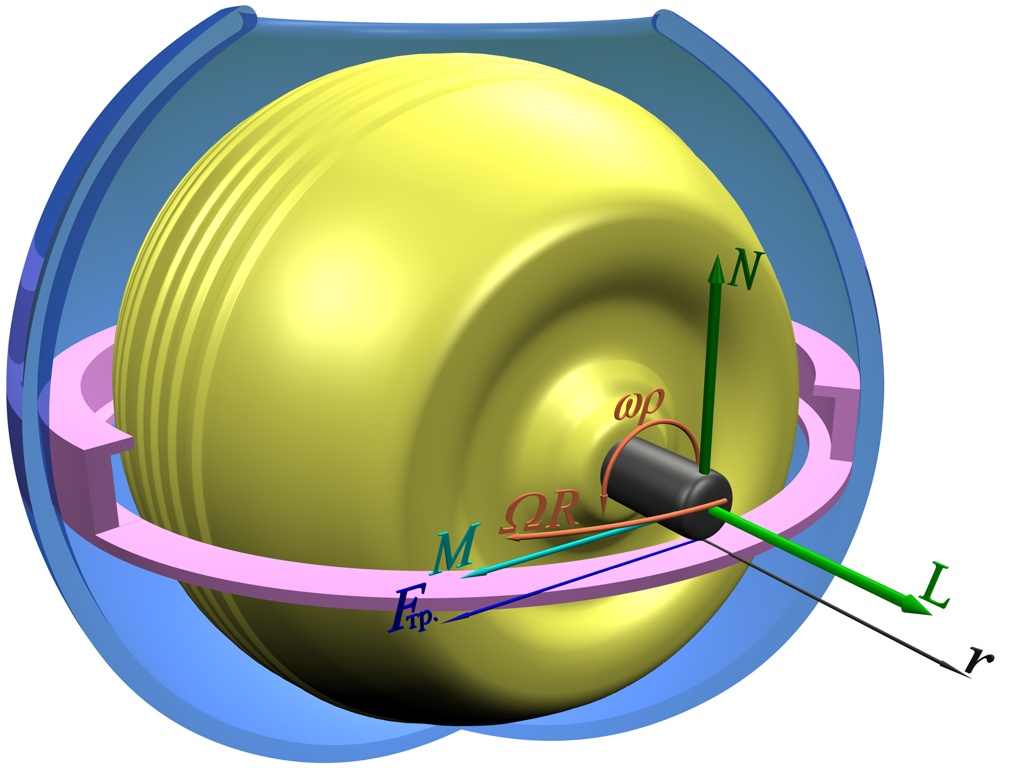
Из механических гироскопов особую позицию занимает роторный гироскоп. Принцип его действия основан на быстром вращении твёрдого тела, имеющего ось вращения, которая изменяет свою ориентацию в пространстве. Скорость вращения гироскопа при этом значительно больше скорости поворота его оси вращения. Основным свойством гироскопов этого типа – это способность четко сохранять в пространстве постоянное направление своей оси вращения и при этом отсутствует воздействие на эту ось момента внешней силы. Впервые такое свойство показал Фуко в 1852 году, когда он экспериментально демонстрировал вращение планеты Земля. Именно из-за этой демонстрации вращения твердого тела гироскоп и получил такое название, происходящее от греческих слов: смотреть и вращение.
Двухосный роторный гироскоп, его свойства и прецессия механического гироскопа.
Когда происходит поворот гироскопа вокруг оси прецессии, перпендикулярной моменту внешних сил, когда момент внешней силы воздействует вокруг оси, которая перпендикулярна оси вращения его ротора, тогда гироскоп поворачивается вокруг оси прецессии, перпендикулярной моменту внешних сил. Так, если позволить гироскоповой оси передвигаться только в плоскости горизонтальной, тогда ось самого гироскопа стремится стать по меридиану, но при том так становится, что вращение гироскопа происходит точно так, как и вращение нашей планеты. Если же ось будет двигаться вертикально (в плоскости меридиана), то ось будет стремиться установаться параллельно оси земли. поэтому это исключительное свойство гироскопа определило широкое применение данного прибора.
Напрямую связано с появлением кориолисовой силы это свойство гироскопа. Так гироскоп при действии момента внешней силы вначале начинает поворачиваться именно в таком направлении действия возникающего внешнего момента, так называемый нутационный бросок.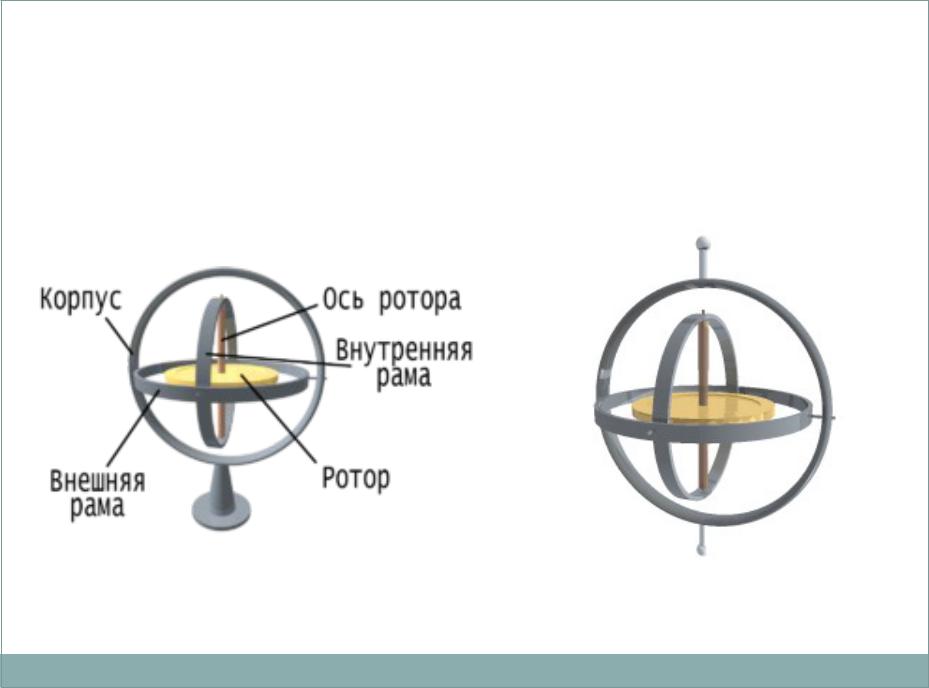 При этом все частицы гироскопа благодаря возникающему моменту будут в это время передвигаться с переносной угловой скоростью его вращения. Однако роторный гироскоп, кроме этого, и сам тоже вращается, следовательно, каждая частица гироскопа будет иметь свою относительную скорость. Поэтому возникает кориолисова сила, которая и будет пытаться заставить гироскоп двигаться только в перпендикулярном направлении, благодаря приложенному моменту, то есть выполнять прецессию. Прецессия будет вызывать кориолисову силу, момент которой скомпенсирует момент внешней силы.
При этом все частицы гироскопа благодаря возникающему моменту будут в это время передвигаться с переносной угловой скоростью его вращения. Однако роторный гироскоп, кроме этого, и сам тоже вращается, следовательно, каждая частица гироскопа будет иметь свою относительную скорость. Поэтому возникает кориолисова сила, которая и будет пытаться заставить гироскоп двигаться только в перпендикулярном направлении, благодаря приложенному моменту, то есть выполнять прецессию. Прецессия будет вызывать кориолисову силу, момент которой скомпенсирует момент внешней силы.
Вибрационные гироскопы – это такие устройства, которые сохраняют свои колебания в только одной плоскости, когда происходит поворот. Такой тип гироскопа является намного проще и дешевле при сопоставимой точности, если сравнивать его с роторным гироскопом. Если посмотреть чаще всего встречающуюся литературу, то там употребляется в последнее время термин как «кориолисовы вибрирующие гироскопы», принцип действия кориолисовых вибрирующих гироскопов основан на эффекте самой силы Кориолиса, которая присутствует и у гироскопов роторного типа.
Это свойство используются в приборах, у которых основной частью является ротор, быстро вращающийся и который имеет некоторое количество степеней свободы или осей возможного вращения. Наибольшее применение нашли гироскопы, помещённые в так называемый карданов подвес. А так как эти гироскопы имеют только три степени свободы, то гироскоп может совершать лишь три независимых поворота вокруг своих осей. Астатическими называются гироскопы, имеющие совпадение центра подвеса совпадает и центра масс, в противном случае приборы называются статическими гироскопами. Если обеспечивать высокоскоростное вращение ротора гироскопа, то для этого применяются обычно специальные гиромоторы. При управлении гироскопом и для снятия с него интересующей информации обычно используются датчики момента и датчики угла. Гироскопы также используются в виде необходимых компонентов как в разных системах навигации (авиагоризонты, гирокомпасы и тому подобное), а также и в других нереактивных системах стабилизации и ориентации космических аппаратов.
Гироскопы предназначены для гашения угловых перемещений моделей вертолетов вокруг оси, или стабилизации углового перемещения моделей. В основном они применяются на моделях вертолетов в тех случаях, когда необходимо повышать стабильность полета модели или создать стабильность искусственно. Самое большое применение (до 90%) в вертолетах привычной схемы гироскопы нашли для стабилизации по вертикальной оси путем управления шагом рулевого винта. Происходит это потому тем, что модель вертолета не обладает стабильностью собственной по вертикальной оси. Как правило, курс стабилизируется на турбореактивных моделях для обеспечения безопасной посадки и взлета, где большие скорости и взлетные дистанции, при узкой взлетно-посадочной полосе. Тангаж стабилизируется на моделях вертолетов с отрицательной, нулевой или слабой продольной устойчивостью, повышающую маневренные возможности моделей. Крен стабилизируют даже и на учебных моделях.
Существует огромное количество изобретений, которые характеризуются длинной и весьма богатой историей использования в различных приборах и устройствах.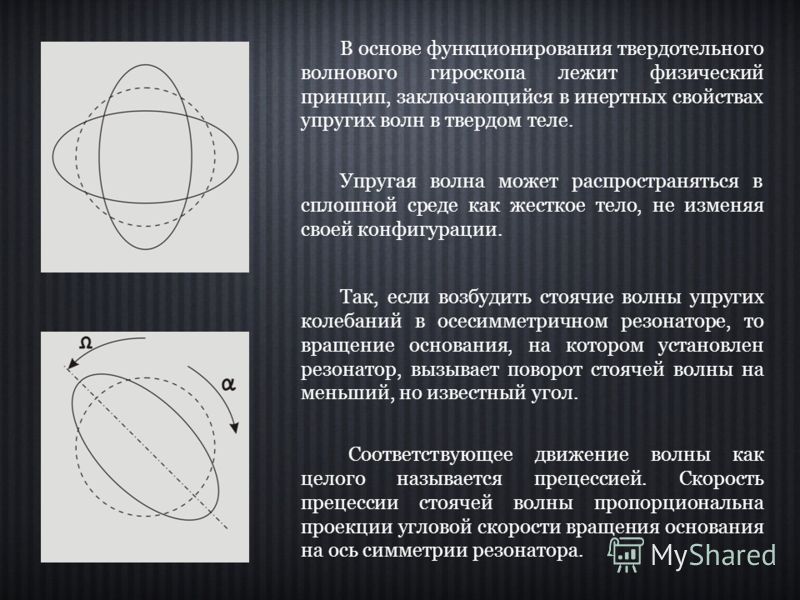 Часто можно услышать название чего-либо, но даже не иметь представления о том, для чего оно предназначено. Именно так и возникает вопрос, что такое гироскоп? Стоит в нем разобраться.
Часто можно услышать название чего-либо, но даже не иметь представления о том, для чего оно предназначено. Именно так и возникает вопрос, что такое гироскоп? Стоит в нем разобраться.
Основное определение
Гироскоп представляет собой навигационный прибор, в котором в качестве основного элемента используется быстро вращающийся ротор, закрепленный таким образом, чтобы его ось вращения поворачивалась. Две рамки карданова подвеса обеспечивают три степени свободы. При отсутствии каких-либо внешних воздействий на устройство ось собственного вращения ротора сохраняет в пространстве постоянное направление. Если на него оказывает воздействие момент внешней силы, которая стремится повернуть ось собственного вращения, то она начинает свое движение не вокруг направления момента, а вокруг оси, находящейся перпендикулярно по отношению к нему.
Особенности устройства
Если говорить о том, что такое гироскоп, то стоит отметить, что в качественно сбалансированном и достаточно быстро вращающемся приборе, установленном на высокосовершенных подшипниках, с малым трением практически отсутствует момент внешних сил, поэтому устройство способно сохранять свою ориентацию в пространстве почти неизменной. Поэтому он способен указывать угол поворота основания, на котором его закрепили. Именно так впервые было наглядно продемонстрировано французским физиком Ж. Фуко. Если ограничить поворот оси специальной пружиной, то при установке прибора на который выполняет разворот, гироскоп будет деформировать пружину до тех пор, пока момент внешней силы не уравновесится. В данном случае сила растяжения или сжатия пружины будет пропорциональна угловой скорости движения летательного аппарата. По такому принципу работает авиационный указатель поворота и многие другие гироскопические приборы. Так как в подшипниках создается очень малое трение, чтобы поддерживать вращение ротора гироскопа, не требуется больших затрат энергии. Обычн, для его приведения в движения, а также для поддержания этого движения достаточно электродвигателя малой мощности либо струи сжатого воздуха.
Поэтому он способен указывать угол поворота основания, на котором его закрепили. Именно так впервые было наглядно продемонстрировано французским физиком Ж. Фуко. Если ограничить поворот оси специальной пружиной, то при установке прибора на который выполняет разворот, гироскоп будет деформировать пружину до тех пор, пока момент внешней силы не уравновесится. В данном случае сила растяжения или сжатия пружины будет пропорциональна угловой скорости движения летательного аппарата. По такому принципу работает авиационный указатель поворота и многие другие гироскопические приборы. Так как в подшипниках создается очень малое трение, чтобы поддерживать вращение ротора гироскопа, не требуется больших затрат энергии. Обычн, для его приведения в движения, а также для поддержания этого движения достаточно электродвигателя малой мощности либо струи сжатого воздуха.
Гироскоп: применение
Чаще всего этот прибор используется в качестве чувствительного элемента для указывающих гироскопических приборов, а также в качестве датчика угла поворота или угловой скорости для устройств, работающих под автоматическим управлением. В некоторых случаях гироскоп может послужить в качестве генератора энергии или момента силы.
В некоторых случаях гироскоп может послужить в качестве генератора энергии или момента силы.
На текущий момент принцип работы гироскопа позволяет активно использовать его в авиации, судоходстве и космонавтике. Почти у каждого морского судна дальнего плавания имеется гирокомпас для автоматического или ручного управления судном, а в некоторых используются и гиростабилизаторы. Система управления огнем корабельной артиллерии обычно оснащается множеством дополнительных гироскопов, которые предназначены для обеспечения стабильной системы отсчета или для измерения угловых скоростей.
Если вам понятно, что такое гироскоп, то следует понимать, что без него просто немыслимо автоматическое управление торпедами. Вертолеты и самолеты тоже обязательно оборудуются этими приспособлениями для того, чтобы давать надежную информацию о деятельности систем навигации и стабилизации. К таким приборам можно отнести авиагоризонт, гироскопический указатель поворота и крена, гировертикаль. Если рассматривать вертолет с гироскопом, то тут этот прибор может служить как в качестве указывающего устройства, так и в качестве датчика автопилота. Многие самолеты оснащены гиростабилизированными и прочим оборудованием – фотоаппаратами с гироскопами, гиросектантами, навигационными визирами. В военной авиации активно используются гироскопы в качестве составных элементов в прицелах бомбометания и воздушной стрельбы.
Многие самолеты оснащены гиростабилизированными и прочим оборудованием – фотоаппаратами с гироскопами, гиросектантами, навигационными визирами. В военной авиации активно используются гироскопы в качестве составных элементов в прицелах бомбометания и воздушной стрельбы.
Применение в современных гаджетах
Итак, если рассматривать, что такое гироскоп, то следует заметить, что этот прибор активно используется не только в указанных ранее сферах. Современные смартфоны и планшеты оснащены массой дополнительных функций и модулей, при этом некоторые оказываются очень даже полезными, а иные могут мешать комфортному использованию устройства, раздражая пользователей. Одним из них является гироскоп в телефоне, что это становится понятно, когда вы будете пользоваться своим аппаратом. С одной стороны, он оказывается очень даже полезным, хотя с другой – большинство пользователей предпочитают просто отключать его.
что это?
Сначала необходимо определиться с тем, что это за устройство и каким функционалом оно характеризуется. Итак, гироскоп в телефоне – что элемент необходим для определения того, как ориентирован прибор в пространстве. В некоторых случаях этот датчик можно применить для защиты отдельных элементов устройства от падения в будущем. Фактически данный датчик предназначен для определения смены положения, а при наличии акселерометра – и ускорения при падении. Затем информация передается вычислительному блоку гаджета. При наличии определенного программного обеспечения прибор принимает решение о том, как ему следует реагировать далее на изменения, произошедшие с ним.
Итак, гироскоп в телефоне – что элемент необходим для определения того, как ориентирован прибор в пространстве. В некоторых случаях этот датчик можно применить для защиты отдельных элементов устройства от падения в будущем. Фактически данный датчик предназначен для определения смены положения, а при наличии акселерометра – и ускорения при падении. Затем информация передается вычислительному блоку гаджета. При наличии определенного программного обеспечения прибор принимает решение о том, как ему следует реагировать далее на изменения, произошедшие с ним.
Для чего еще он нужен?
Итак, если с вопросом, что такое гироскоп, становится все понятно, то остается выяснить, зачем его используют в телефонах. Защита внутренностей тут не является единственной задачей. В сочетании с разнообразным софтом на него ложится целый ряд различных функций. К примеру, смартфон может использоваться для игр, в которых управление осуществляется посредством наклонов, встряхивания или поворотов прибора. Подобное управление позволяет сделать игры поистине увлекательными, благодаря чему они пользуются повышенным спросом.
Подобное управление позволяет сделать игры поистине увлекательными, благодаря чему они пользуются повышенным спросом.
Можно отметить, что продукция компании “Эппл” оснащается гироскопами, и они играют весьма значимую роль, так как к ним привязана работа многих приложений. Под него специально разработали режим, получивший название CoverFlow. Существует очень большое количество приложений, работающих в данном режиме, однако можно остановиться на нескольких, наиболее наглядно демонстрирующих его. К примеру, если на iPhone использовать калькулятор, то в портретном положении пользователю будут доступны только простые действия, а именно: сложение, вычитание, деление и умножение. Но при повороте устройства на 90 градусов все изменится. Калькулятор при этом переключается в расширенный режим, то есть инженерный, в котором функций будет доступно гораздо больше.
Если вам понятно, как работает гироскоп, то следует отметить, что его функции могут использоваться и для определения собственного местоположения на местности.
Можно просматривать на таком приборе карту местности с применением GPS-навигации, и в этом случае карта всегда будет поворачиваться в ту сторону, куда направлен ваш взгляд. Поэтому, если вы стоите лицом, к примеру, к речке, то это отобразится на карте, а если повернетесь, то изменится и положение карты. Благодаря этому ориентирование на местности значительно упрощается и может стать достаточно полезно людям, увлеченным активным отдыхом.
Проблемы с гироскопом в телефоне
Можно сказать и о недостатках, присущих гироскопам. Очень часто их отключают из-за того, что программы реагируют на изменение положения в пространстве с некоторым запозданием. К примеру, если вы решили почитать, лежа на диване, с экрана смартфона или планшета, то гироскоп и программа, связанная с ним, будут менять ориентацию страницы каждый раз, когда вы будете поворачиваться или смените позу. Это причиняет много неудобств, так как очень редко устройство способно правильно интерпретировать положение в пространстве, а ситуация усугубляется из-за запоздалой реакции программы.
Современные разновидности
Первые гироскопы были механическими. Этот вид устройств используется и сейчас, но с некоторыми усовершенствованиями, позволяющими сделать их более полезными. На данный момент существует лазерный гироскоп, который лишен недостатков, свойственным механическим. И именно такой прибор используется в современной технике.
Электроника НТБ – научно-технический журнал – Электроника НТБ
Принцип действияРассмотрим основополагающий принцип действия МЭМС-гироскопов. Практически все они — вибрационные гироскопы. Это означает, что в каждом из них есть рабочее тело, которое, в простейшем случае, совершает возвратно-поступательное движение в одной плоскости. Если поставить это тело на вращающуюся платформу, плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу начнет действовать сила Кориолиса Fс = 2m[Ω × v], где Ω — вектор угловой скорости (перпендикулярен плоскости вращения), v —
вектор линейной скорости тела относительно вращающейся платформы, m — масса тела. Модуль Fс = 2mΩv ⋅ sin ϕ, где ϕ — угол между векторами линейной и угловой скорости. Следовательно, сила Кориолиса направлена перпендикулярно направлению колебаний (рис.1) и оси вращения. При противоположных направлениях движения сила Кориолиса также действует в противоположных направлениях. На этом и основан принцип вибрационного гироскопа.
Определив силу Кориолиса и зная линейную скорость тела, несложно вычислить угловую скорость и ее изменение (угловое ускорение). Задача упрощается, если линейная скорость колебаний v изменяется по синусоидальному закону v = v0sin wt. Тогда определение ускорения Кориолиса сводится к детектированию сигнала Ω, модулирующего несущую с частотой w:
аc = 2v0Ω sin wt. Данная задач давно и успешно решается в радиотехнике, в частности, с помощью квадратурных модуляторов/демодуляторов.
Балочные гироскопы
Все конструкции вибрационных гироскопов, при широком их разнообразии, можно свести к нескольким типам. Одними из самых первых были балочные гироскопы. Их принцип действия таков: консольную балку (пластину) заставляют колебаться с помощью пьезоэлементов в направлении оси Х
(рис.2). Под действием силы Кориолиса при вращении относительно оси Z, параллельной продольной оси балки, возбуждаются колебания вдоль оси Y. Они регистрируются другими пьезоэлементами.
Конструкции балок могут быть самыми разными. Например, в гироскопах ОАО «Элпа» БВГ-3 и БВГ-4 используется трехполюсный вибратор — стальная балка с поперечным сечением в виде равностороннего треугольника [1]. К каждой грани балки приклеено по пьезоэлементу: на нижней стороне – возбуждающий вибрацию, на боковых гранях – измерительные. Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т.п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы.
В биморфных гироскопах резонатор представляет собой две склеенные пьезоэлектрические пластины, поляризованные в противоположных направлениях. К пластинам (или к одной из них) прикладывают напряжение, одна пластина начинает сжиматься, другая растягиваться, в результате возникают колебания. При вращении под действием силы Кориолиса возбуждаются вторичные колебания, которые можно детектировать теми же электродами. По данному принципу построен, в частности, вибрационный гироскоп БВГ-500 (“Элпа”).
Отметим, что конструкция резонатора может быть гораздо сложнее описанной. Так, один из лидеров (и зачинателей) промышленного освоения вибрационных пьезоэлектрических гироскопов — компания Murata — запатентовала структуру (приоритет от 28 октября 2002 года) [2], в которой резонатор представляет собой пару колеблющихся в противофазе пластин (рис.3). Пластины либо биморфные, либо наклеенные на металлическое основание униморфные. Каждая из пластин состоит из трех частей с противоположными направлениями поляризации. При вращении относительно оси Z возникают вторичные колебания (вдоль длины пластин). Хотя первичные колебания пластин происходят в противофазе, сигналы их генерации синфазны. Вторичные же колебания, обусловленные силой Кориолиса, вызывают дополнительные противофазные сигналы на электродах, разность которых пропорциональна угловой скорости вращения.
Таким образом, с помощью дифференциальной схемы можно детектировать эти сигналы. При этом используются те же электроды, что и для генерации первичных колебаний.
Компания Murata известна на рынке биморфыми пьезоэлектрическими гироскопами ENV-05. Недавно на смену им пришли более совершенные ENC-03R. Это миниатюрное устройство (8×4×2 мм) весом 0,2 г обладает впечатляющими характеристиками (cм. таблицу). Схема включения устройства также проста (рис.4).
Основной недостаток пьезокерамических вибрационных гироскопов — температурная нестабильность параметров, обусловленная свойствами пьезокерамики. Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп XV-3500CB. Его отличает, помимо оригинальной конструкции (рис.5), использование кварца в качестве пьезоэлемента. В результате в диапазоне измерений ±100°/с удалось достичь приемлемой температурной стабильности — 5% (см. таблицу) при миниатюрном корпусе (5×3,2×1,3 мм).
Гироскопы-камертоны
Одна из важнейших конструкций резонатора гироскопа — в форме камертона, tuning fork (TF). Принцип действия такого датчика (рис.6) прост: колеблющиеся в одной плоскости в противофазе массы при вращении вокруг вертикальной оси начинают совершать колебания в перпендикулярной плоскости. Возможно, первым МЭМС-гироскопом, использующим этот принцип, стал гироскоп [3], созданный в компании Charles Stark Draper Laboratory (www.draper.com) — бывшей лаборатории Драпера Массачусетского технологического института. Он был создан еще в 1993 году [4, 5]. Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис.7). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.
Описанный принцип реализован компанией Fujitsu в серии МЭМС-гироскопов S1BG. Их TF-резонатор выполнен из хорошо известного пьезоэлектрика LiNbO3. Гироскоп работает в диапазоне ±60°С, чувствительность — 25±2,5 мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления —
не более 6 мА. Габариты корпуса — 12,4×8,4×12,5 мм, рабочий диапазон температур — -40…+85°С.
Компания Fujitsu анонсировала и гироскоп S1DG, который определяет скорость вращения одновременно по двум осям. Заявленный динамический диапазон — ±300°/с, чувствительность — 0,67±20% мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления — 5 мА. Габариты корпуса — 6×8×1,3 мм, рабочий диапазон температур —
-5…+75°С.
В скором времени число серийно производимых гироскопов данного типа пополнят и изделия компании Honeywell — одноосевые гироскопы семейства GG1178 (рис.9). Семейство будет представлено приборами с динамическим диапазоном ±75°/с, ±150°/с и ±300°/с (см. таблицу), корпус — LCC-14 (9,78×9,27×4,57 мм).
Гироскопы Analog Devices по технологии iMEMS
Один из основных недостатков рассмотренных гироскопов — сильная восприимчивость к линейным нагрузкам. Кроме того, технологически сложно массово производить МЭМС с колебаниями в вертикальной плоскости — это противоречит принципу планарной технологии. Преодолеть эти проблемы в значительной степени удалось, используя МЭМС-гироскопы, в которых направления колебаний — как первичных, так и вызванных ускорением Кориолиса, — лежат в плоскости подложки. В известной степени такие гироскопы можно рассматривать как вариации гироскопа-камертона. Значительных успехов в данной области достигла компания Analog Devices (www.analog.com), которой удалось создать технологию iMEMS и на ее основе производить гироскопы серий ADXRS и ADIS. Поскольку эта компания — безусловный лидер в промышленном производстве данного класса гироскопов, остановимся на ее продукции подробнее.
Основной элемент гироскопа серии ADXRS — это закрепленная на гибких подвесках рамка, внутри которой совершает поступательные колебательные движения некая масса (рис.10) [6]. Для определенности положим, что колебания происходят вдоль оси Х. Подвесы рамки допускают ее колебания только вдоль оси Y. Колебания массы возбуждаются электростатически, с помощью гребенки зубцов (рис.11).
На внешней поверхности рамки и на подложке расположены гребенки контактов, образующих систему плоских конденсаторов.
При колебаниях рамки относительно подложки расстояния между этими зубцами изменяются, соответственно изменяется и емкость. Когда подложка неподвижна (или движется прямолинейно и равномерно), рамка не колеблется. Если же начать вращать такую структуру вокруг оси Z, то под действием силы Кориолиса возникнут вынужденные колебания рамки вдоль оси Y.
Однако остается проблема компенсации линейных ускорений. В приборах серии ADXRS она решена за счет размещения на одной подложке двух одинаковых структур, в которых генерируются строго противофазные колебания (рис.11). Измерительные сигналы, снимаемые с емкостей обоих структур, поступают в дифференциальную схему. При этом сигналы, вызванные колебаниями под воздействием ускорения Кориолиса, будут складываться, а синфазные составляющие, обусловленные линейными ускорениями, — вычитаться.
Отметим, что приведенная конструкция проста только в описании. Элементы этих МЭМС чрезвычайно малы. Амплитуды колебаний зубцов гребенок (обкладок конденсаторов) составляет 16×10-15 м — меньше межатомного расстояния! Изменение емкости такого конденсатора — 12×10-21 Ф [6].
Очевидно, чтобы обработать сигнал с таких емкостей, нужны прецизионные усилители, корреляционные методы обработки и т.п. Вся необходимая электроника интегрирована в ту же СБИС. В результате гироскопы серии ADXRS демонстрируют достаточно высокие результаты (см. таблицу).
Для примера рассмотрим гироскоп ADXRS300 (рис.12). Это миниатюрное устройство (размер корпуса LCPBGA-32 —
7×7×3 мм) обеспечивает работу в диапазоне угловых скоростей ±300°/с (относительно вертикальной оси Z). При этом прибор устойчив к линейным ударным нагрузкам до 2000 g. Влияние линейных ускорений (вдоль любой оси) составляет 0,2°/с/g. Собственная частота резонаторов — 14 кГц. СБИС оснащена схемой самотестирования, встроенным датчиком температуры, встроенным повышающим преобразователем напряжения (на переключаемых конденсаторах) для генерации колебаний резонатора (для этого необходимо напряжение порядка 20 В) и встроенным источником опорного напряжения. Гироскопы рассмотренного семейства — это одноосевые приборы, с линейным аналоговым выходом (напряжение на выходе меняется по линейному закону в зависимости от частоты вращения).
Компания Analog Devices выпускает и семейство гироскопов ADIS. Оно построено на базе серии ADXRS, но с расширенными функциональными возможностями — со встроенными АЦП, средствами термокомпенсации и т.п. Эти гироскопы работают в диапазонах ±80 и ±300°/с, а некоторые обладают возможностью перестройки динамического диапазона в пределах от ±80 до ±320°/с. Характерный пример — гироскоп ADIS16255 (рис.13). Помимо датчика угловой скорости он оснащен основным 14-разряным АЦП для оцифровки сигнала датчика, вспомогательными 12-разрядными ЦАП и АЦП, датчиком температуры с оцифрованным (12 бит) выходом, встроенной системой автотестирования и калибровки, SPI-интерфейсом и т.д. (рис.13). При динамическом диапазоне ±320°/с чувствительность составляет 0,07°/с/LSB (LSB — младший бит оцифрованного сигнала).
Отметим, что недавно компания анонсировала трехосевой гироскоп ADIS16350 (рис.14) — интегрированный модуль, в состав которого, помимо трехосевого гироскопа (±320°С), входит и трехосевой датчик линейных ускорений (акселерометр) с диапазоном измерений ±10 g. Сигналы обоих датчиков оцифровываются АЦП с разрешением 14 разрядов. Модуль оснащен вспомогательными 12-разрядными ЦАП и АЦП. Обмен данными возможен через SPI-интерфейс. Детали конструкции не оглашаются, однако судя по размерам модуля (22,7×23,2×22,9 мм), он представляет собой микросборку.
Гироскопы с диском-вибратором
Еще одна разновидность вибрационных гироскопов — устройства с диском-резонатором. Один из первых гироскопов с дисковым резонатором был создан сотрудниками лаборатории твердотельной электроники Мичиганского универститета в 1994 году [7, 8]. Тогда был продемонстрирован прототип гироскопа (рис.15а), представлявшего собой никелевый диск диаметром 1 мм — обод с восемью полукруглыми спицами, жестко закрепленными в центре на поликремниевой подложке. С внешней от обода стороны с небольшим зазором располагаются приводящие, измерительные и корректирующие электроды. Под действием прикладываемого к приводящим электродам напряжения генерируется основная мода колебаний (например, вдоль оси Y) — диск начинает вытягиваться вдоль оси Y и сжиматься вдоль оси Х (рис.16). Если подложка (а с ней и диск) начинает вращаться вокруг оси Z, сила Кориолиса стремится вызывать колебания в направлении оси X.
Возникает вторая (измерительная) мода колебаний — главная ось эллипса смещается на 45°. Амплитуда этих колебаний qsens пропорциональна угловой скорости вращения WZ:
qsens = 4Ag⋅Q/w0⋅qdrive⋅WZ, где Ag ≈ 0,37 — так называемое угловое усиление кольцевой структуры (константа, определяемая геометрией и высокостабильная при изменении температруры), Q — добротность резонатора, w0 — резонансная частота колебаний, qdrive — амплитуда в основной моде (без вращения). Эти амплитуды регистрируют с помощью емкостных датчиков с внешней стороны обода в соответствующих точках.
Данная конструкция обладает рядом существенных особенностей. Прежде всего, благодаря симметричной структуре резонансные частоты в основной и измерительной моде одинаковы. Кроме того, узловые точки обеих мод совпадают. Такой резонатор обладает высокой добротностью, следовательно — потенциально большим разрешением измерения угловой скорости. Он мало восприимчив к ударам и вибрациям. Кроме того, неизбежные производственные дефекты (например, асимметрию) резонатора можно устранить электронным путем, используя специальные подстроечные электроды [8].
Уже первый образец показал добротность Q ~ 2000 и разрешение 0,5°/с. При динамическом диапазоне ±100°/с прибор демонстрировал нелинейность на уровне 0,2%. Впоследствии (1998 год) была разработана технология создания подобных структур на поликремнии (рис.15б) [9]. Диаметр вибратора составил 1,1 мм при толщине диска 80 мкм (ширина обода и спиц — 4 мкм). Добротность прототипа оказалась на уровне 1200 (в глубоком вакууме). Однако уже в 2002 году разработчики представили МЭМС-гироскоп на монокристалле кремния с ориентацией (111) на стеклянной подложке (рис.15в). При диаметре диска 2,7 мм и толщине 150 мкм добротность резонатора составила 12000. Это обеспечило разрешение 132 мВ/°/с, соответствующую точность 0,002°/с (7,2°/ч) и нелинейность 0,02%. Дрейф нуля находился в пределах 1°/с за 10 часов без термокомпенсации [10].
Сходный принцип применен в гироскопе с резонатором в виде восьмиконечной звезды, образованной суперпозицией двух квадратов (рис.17) [11]. Такая конструкция позволяет использовать для измерений угловой скорости колебательные моды более высоких порядков, а также обеспечивает более точную электронную балансировку резонатора. В результате добротность резонатора из монокристаллического кремния составила 25000 и выше — до 115000.
В серийных приборах дисковый резонатор использован в гироскопах компании Silicon Sensing Systems (www.siliconsensing.com), совместного дочернего предприятия фирм Sumitomo Precision Products Company и British Aerospace Systems and Equipment (сейчас — BAE Systems). Гироскопы этой компании используют описанный принцип, но их отличает не емкостной, а индукционный метод генерации и определения амплитуды вынужденных колебаний [12]. Резонатор находится в постоянном магнитном поле, перпендикулярном плоскости диска. Источник поля — магнит из самария-кобальта, расположенный над вибратором диаметром 6 мм (рис.18). Чувствительные элементы и приводы представляют собой токовые петли.
Компания предлагает несколько линеек приборов — SRC03, SRC05, GYRO-SiRRS01 (разработан еще компанией BAE Systems) и др. (см. таблицу). В частности, гироскопы серии SRC03 выпускаются в корпусах с габаритами 29×29×18,4 мм.
Все приборы Silicon Sensing Systems высокоустойчивы к ударным и вибрационным воздействиям — они работают при линейных ускорениях свыше 100 g и ударах до 200 g (1 мс). Продукция этой компании в значительной мере ориентирована на специальные применения.
Вращательные вибрационные микрогироскопы
Развивается и направление вращательных дисковых резонаторов. Первые значимые работы в этой области появились в начале 1990-х годов. Они проводились в Центре датчиков и приводов Калифорнийского университета в Беркли [13, 14], а также в лаборатории Драпера (в Кембридже) [15]. Патенты в этой области принадлежат и компании Analog Devices [16].
Суть метода — диск-резонатор крепят на торсионах (как правило, на четырех) и электростатически (например, гребенчатыми приводами, связанными со спицами диска) вызывают крутильные колебания относительно вертикальной оси Z (рис.19) [13]. Если такой вибрирующий диск вращается вокруг оси, лежащей в его плоскости (например, X), под действием силы Кориолиса возникают колебания перпендикулярно плоскости диска. Один край диска (в нашем случае — вдоль оси Y) начнет подниматься, другой — опускаться в зависимости от текущего направления крутильных колебаний. Если гироскоп вращать одновременно вокруг осей X и Y, возникнут колебания относительно осей Y и X, соответственно. На поверхности диска формируют плоский электрод, на подложке под диском —
четыре секторных электрода (соответственно, по осям X и Y). Измеряя изменение емкости между диском и этими электродами на подложке, можно определить амплитуды вертикальных колебаний и угловые скорости вращения одновременно вокруг двух осей [14].
Существует множество вариаций данного метода. Например, диск закреплен на оси, препятствующей его колебаниям в вертикальной плоскости. Но ось связана с внешней рамкой, которая может совершать вынужденные колебания, которые и детектируются емкостными датчиками [17]. Однако несмотря на более чем десятилетнюю историю, данные конструкции пока не нашли воплощения в серийных изделиях. Видимо, причина в технологических сложностях ее массовой реализации. Тем не менее, были сообщения о применении такой конструкции в МЭМС-гироскопах отечественной компании «Гирооптика»
(www.gyro.ru). Фирма заявляла о создании датчиков угловых скоростей 7ЧСК(У)-Р и микросборок приборов на их основе. Объявленный диапазон измерений ±360°/с, нестабильность —
не более 0,5%, стойкость к одиночным ударам до 16000 g [18]. Однако информации о серийной продукции этой компании нет.
В заключение отметим еще один перспективный тип конструкции — так называемый гироскоп с распределенной массой [19], созданный в Лаборатории микросистем калифорнийского университета в Ирвине (UCI MicroSystems Laboratory). Возглавляет эту лабораторию выпускник мехмата МГУ 1991 года Андрей Шкел. Предложенная модель представляет собой несколько осцилляторов, колеблющихся с одинаковой фазой и частотой и расположенных симметрично относительно центра связывающего их каркаса (рис.20). При радиальном направлении вибраций осцилляторов вращение вокруг вертикальной оси гироскопа приведет к возникновению силы Кориолиса, направленной по касательной к каркасу. Эта сила вызывает крутильные колебания, которые регистрируются емкостными датчиками.
Достоинства данной конструкции обусловлены двумя факторами. Во-первых, колебания осцилляторов происходят одновременно в нескольких осесимметричных направлениях. Кроме того, первичные и вторичные (измерительные) колебания — разных типов, линейные и крутильные. В результате существенно снижается воздействие первичных колебаний на датчики измерительных колебаний. Благодаря этому сигнал, соответствующий нулевой угловой скорости, оказывается высокостабильным. Снижается и уровень шумов. Принцип детектирования кругового смещения позволяет устранять воздействие линейных ускорений. Кроме того, поскольку все вызывающие генерацию силы попарно противоположны и равны по величине, их сумма в точке крепления вибратора к подложке (в центре) практически равна нулю. Поэтому генерируемые колебания не передаются на подложку. Наконец, многоосевая структура минимизирует влияние различных производственных дефектов, внутренних напряжений структуры, анизотропных свойств материала конструкции.
Все это позволяет существенно увеличить амплитуду колебаний осцилляторов, а пропорционально ей — и амплитуду измерительных колебаний. В результате существенно возрастают чувствительность гироскопа и ширина его рабочей полосы частот.
Таким образом, при всем разнообразии конструкций МЭМС-гироскопов только пьезогироскопы, а также вибрационные гироскопы компании Analog Devices можно отнести к действительно массовым изделиям. Но все эти устройства при видимой простоте вбирают в себя новейшие технологические
достижения, обсуждение которых осталось за рамками данной
статьи. Отметим, что это еще и достаточно молодое направление, настоящий расцвет которого еще впереди. Залог чему —
чрезвычайно широкий спектр применений, от фото- и видеокамер, компьютерных перчаток-манипуляторов, систем автомобильной электроники до средств навигации самого разного, в том числе и военного, назначения (такие гироскопы уже встраивают в управляемые снаряды). Сейчас МЭМС-датчики планируют производить такие компании, как Freescale, Kionix, Hitachi Metals, Oki Electric и STMicroelectronics. Важно, что определенные успехи на поприще МЭМС-датчиков угловых скоростей достигнуты и российскими компаниями — остается только пожелать им всемерно развивать свои производственные и технологические возможности.
Литература
1. Сафронов А. и др. Малогабаритные пьезоэлектрические вибрационные гироскопы: особенности и области применения. — ЭЛЕКТРОНИКА: НТБ, 2006, №8, с.62–64.
2. European Patent Application EP 1416249 A1, приоритет от 28 октября 2002 года.
3. US Patent 6.862.934 , приоритет от 10 апреля 2003 года.
4. Bernstein, J. et al. A micromachined comb-drive tuning fork rate gyroscope. —
Proc. IEEE Micro Electro Mechanical Systems Workshop (MEMS ’93), Fort Lauderdale, pp. 143-148.
5. M. Weinberg, et al. A Micromechanical Comb Drive Tuning Fork Gyroscope for Commercial Applications, 2nd St. Petersburg International Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, May 1995.
6. Geen J., Krakauer D. New iMEMS Angular-Rate-Sensing Gyroscope. —
Analog Dialogue, 37–03 (2003), www.analog.com.
7. Putty M.W. A micromachined vibrating ring gyroscope. — Ph.D. dissertation, University of Michigan, Ann Arbor, March 1995.
8. Putty M.W. and Najafi K. A Micromachined Vibrating Ring Gyroscope. —
Solid-State Sensors and Actuators Workshop, Hilton Head, SC, June 1994, p. 213–220.
9. Ayazi F., Najafi K. A HARPSS Polysilicon Vibrating Ring Gyroscope. — Journal Of Microelectromechanical Systems, Vol. 10, № 2, June 2001.
10. Guohong He, Khalil Najafi. A Single-Crystal Silicon Vibrating Ring Gyroscope. MEMS 2002: micro electro mechanical systems, Las Vegas NV, 20–24 January 2002.
11. Zaman M.F., Sharma A., Amini B.V., and Ayazi F. The resonating star gyroscope. — Proc. IEEE Micro Electro Mechanical Systems Conference (MEMS’05), Miami, FL, Jan. 2005, p. 355–358.
12. Hopkins I. Performance and Design of a Silicon Micromachined Gyro. —
Silicon Sensing Systems, 2001.
13. Juneau T., Pisano A. P., and Smith J. H. Dual axis operation of a micromachined rate gyroscope. — Proc., IEEE 1997 Int. Conf. on Solid State Sensors and Actuators (Tranducers ’97), Chicago, June 16–19, p. 883–886.
14. US Patent 6,067,858, приоритет от 30 мая 1997 года.
15. US Patent 5535902, приоритет от 22 мая 1995 года.
16. US Patent 5635640, приоритет от 3 июня 1997 года.
17. Горнев Е.С., Зайцев Н.А. и др. Обзор микрогироскопов, сформированных по технологии поверхностной или объемной микромеханики. — Нано- и микросистемная техника, 2002, № 8, с. 2–6.
18. Попова И.В. и др. Микромеханические датчики и системы, практические результаты и перспективы развития. — XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, май, 2005.
19. Cenk Acar and Andrei M. Shkel. An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes. — Journal оf Microelectromechanical Systems, Vol. 14, №3, June 2005, p.520–528.
микроэлектромеханические системы, часть 1 / Аналитика
Наномир на данный момент является своего рода фронтиром – передним краем науки, который пока еще только покоряют ученые-пионеры. А вот микромир уже достаточно давно освоен и в нем вовсю идет строительство. Пожалуй, самым впечатляющим типом микроструктур, которые создаются людьми, являются MEMS – микроэлектромеханические системы.
Обычно MEMS делят на два типа: сенсоры – измерительные устройства, которые переводят те или иные физические воздействия в электрический сигнал, и актуаторы (исполнительные устройства) – системы, которые занимаются обратной задачей, то есть переводом сигналов в те или иные действия. В этой части статьи поговорим о первой категории MEMS.
Пожалуй, самыми «трендовыми» из MEMS-сенсоров являются датчики движения. Они в последнее время постоянно на слуху: телефоны, коммуникаторы, игровые приставки, фотокамеры и ноутбуки все чаще и чаще снабжаются акселерометрами (датчиками ускорения) и гироскопами (датчиками поворота).
В мобильных телефонах и видеоприставках чувствительность к движениям пользователя используется в основном, что называется, «для прикола». А вот в портативных компьютерах акселерометры выполняют очень даже полезную функцию: улавливают момент, когда жесткий диск может подвергнуться повреждению из-за удара и паркуют его, диска, головки. В фототехнике использование датчиков движения не менее актуально – именно на их основе работают честные системы стабилизации изображения.
Классический гироскоп образца XIX века. Засунуть такой в iPhone или джойстик Wii довольно-таки затруднительно
Впрочем, рассуждать о том, что в реальности полезнее – активные игры на Wii, функция автоматического поворота картинки на iPhone, защита винчестера или возможность снимать фотографии без смазывания – дело неблагодарное. Покупателям нравится и то, и другое, и третье, и четвертое. Поэтому производители в последнее время стараются как можно более плотно использовать датчики движения.
Благо, возможностей у них для этого предостаточно: автопроизводители (из массовых индустрий они первыми опробовали данного рода устройства) уже несколько десятилетий активно эксплуатируют датчики движения, например, в подушках безопасности и антиблокировочных системах тормозов.
Так что соответствующие чипы давно разработаны, выпускаются целым рядом крупных и сравнительно мелких компаний и производятся в таких количествах, что цены давно и надежно сбиты до минимума. Типичный MEMS-акселерометр сегодня обходится в несколько долларов за штуку.
И места занимает – всего ничего. Для примера, размер корпуса пьезогироскопа Epson XV-8000 составляет 6×4,8×3,3 мм, а трехосного акселерометра LIS302DL производства ST Microelectronics – всего лишь 3x5x0,9 мм. Причем речь именно о размерах готового устройства с корпусом и контактами – сам кристалл еще меньше.
Датчик движения Epson XV-8000. И это далеко не самый компактный MEMS-сенсор
На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе. Подвижная часть системы – классический грузик на подвесах. При наличии ускорения грузик смещается относительно неподвижной части акселерометра. Обкладка конденсатора, прикрепленная к грузику, смещается относительно обкладки на неподвижной части. Емкость меняется, при неизменном заряде меняется напряжение – это изменение можно измерить и рассчитать смещение грузика. Откуда, зная его массу и параметры подвеса, легко найти и искомое ускорение.
Основной принцип работы конденсаторных акселерометров
Это теория. На практике, MEMS-акселерометры устроены таким образом, что отделить друг от друга составные части – грузик, подвес, корпус и обкладки конденсатора – не так-то просто. Собственно, изящество MEMS в том и заключается, что в большинстве случаев в одной детали здесь удается (а вернее, попросту приходится) комбинировать сразу несколько предметов.
Относительно простой, но чрезвычайно миниатюрный и чувствительный MEMS-акселерометр разработки Sandia Labs
Зачастую, современные MEMS-гироскопы устроены идентично акселерометрам. Просто в них значения ускорений по осям пересчитываются в значения углов поворота – конструкция примерно та же, но на выходе другая величина.
Гироскоп L3G4200D производства ST Microelectronics используется в iPhone 4
Тот же STM L3G4200D, фотография с большим увеличением
Однако встречаются и гироскопы, устройство которых “заточено” именно под вращение. Такие MEMS – одни из красивейших.
Еще один гироскоп ST Microelectronics – LYPR540AH
Крупный план STM LYPR540AH. Толщина деталей этой ажурной конструкции – около 3 микрон!
Еще один MEMS-гироскоп
Помимо конденсаторных датчиков, существуют MEMS-акселерометры, использующие иные принципы. Например, датчики, основанные на пьезоэффекте. Вместо смещения обкладок конденсатора, в акселерометрах такого типа происходит давление грузика на пьезокристалл. Основной принцип тот же, что и в пьезозажигалках – под воздействием деформации пьезоэлемент вырабатывает ток. Из значения напряжения, зная параметры системы, можно найти силу, с которой грузик давит на кристалл – и, соответственно, рассчитать искомое ускорение.
Основной принцип работы акселерометров на пьезоэлементах
Есть и более экзотический тип MEMS-акселерометров – термальные датчики ускорения. В них в качестве основного объекта используется горячий пузырек воздуха. При движении пузырек отклоняется от центра системы, это отслеживается датчиками температуры. Чем дальше сместился пузырек – тем больше величина ускорения.
Двухосный термальный акслерометр
Менее популярный в статьях и обсуждениях, но гораздо более массовый тип MEMS-устройств – микроскопические микрофоны. Опять-таки, наиболее распространенными системами этого типа являются те, которые основаны на конденсаторном принципе.
Устроены они – проще некуда. Принципиально важных элементов в таком микрофоне всего два: это гибкая обкладка – мембрана, и более толстая, неподвижная обкладка. Под воздействием давления воздуха мембрана смещается, изменяется емкость между обкладками – при постоянном заряде изменяется напряжение. Эти данные пересчитываются в амплитуды и частоты звуковой волны.
Чтобы минимизировать влияние давления воздуха на неподвижную обкладку, эта обкладка перфорируется. Кроме того, под ней делается сравнительно большая ниша с обязательным вентиляционным отверстием. Идея в том, что единственным подвижным элементом в системе в идеале должна быть мембрана – и только она.
микроэлектромеханический микрофон под микроскопом. Диаметр мембраны чуть больше половины миллиметра
Как и в случае с акселерометрами, здесь может быть использован пьезоэффект – в этом случае под мембраной ставится пьезокристалл. Дальше – как и в случае пьезоакселерометров: давление воздуха передается мембраной на пьезоэлемент, под этим воздействием кристалл вырабатывает ток. Напряжение измеряется и переводится в амплитуду и частоту звука.
Самый миниатюрный MEMS-микрофон компании Akustica (площадь кристалла – 1 кв.мм) теряется рядом со своими более крупными родственниками
То, что годится для звука, подходит и для измерения давления в иных областях. Похожие на микрофоны MEMS-системы могут использоваться в качестве датчиков давления. Несложно догадаться, что применение такие сенсоры находят в уйме областей.
Но можно выделить одну область, которая является наиболее интересной и наиболее специфичной для датчиков давления, основанных на MEMS-технологии. Это медицина. Здесь размер действительно имеет значение. Если в какой-нибудь трубопровод вполне можно встроить «обычный», макроскопический датчик, то с кровеносным сосудом такой фокус, очевидно, не получится. Тут нужны очень и очень компактные решения.
Ультракомпактный и высокоточный датчики давления на фоне одноцентовой монеты (по размеру она примерно эквивалентна нынешним русским 50 копейкам)
Разумеется, в медицине востребованы не только датчики давления. Существует множество микроскопических биодатчиков, измеряющих массу разнообразных величин – от температуры до уровня глюкозы. Есть и более неожиданные устройства, вроде микроскопических систем подачи лекарств. И, разумеется, есть куча интереснейших прототипов, многие из которых в принципе не имеют аналогов среди макроустройств.
Прототип щипцов для микрохирургии глаза. Размеры головки щипцов – порядка 1,5х1,5 миллиметра. Толщина губ – несколько десятков микрон. Человеческий волос этими щипцами подцепить не получится – он для них слишком толстый
Что ж, разговор о MEMS-сенсорах мы на этом завершим. Впереди у нас еще более интересная и захватывающая тема: MEMS-актуаторы. Печатающие головки струйных принтеров, микрозеркальные матрицы, элементы оптико-волоконных сетей и многое другое. Обещаем: скучно не будет!
Другие статьи серии:
Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Принцип работы гироскутера. Как устроен гироцикл?
Гироскутер: основные принципы работы
Человек неосведомлённый, ни разу не задававшийся вопросом о том, как работает гироскутер, скорее всего подумает, что здесь не обошлось без магии и колдовства. Действительно, взглянув на небольшую доску, удерживающую равновесие самостоятельно всего на двух колёсах может поразить воображение. А если её управляет человек весом около 100 килограммов, то картина и вовсе может повергнуть в шок, ведь гироцикл нарушает все законы физики. На самом же деле ситуация вполне объяснима, а если разобраться, то и вовсе проста и понятна. Что ж, давайте знакомиться с этим транспортом будущего.
Что собой представляет?
Данный гаджет состоит из нескольких ключевых узлов, включая:
- 1) Колёса-приводы с электрическим мотором;
- 2)Центральный компьютер, обрабатывающий информацию;
- 3) Система гироскопических датчиков, размещённых по всему корпусу;
- 4) Сам корпус;
- 5) Литий-ионный аккумулятор.
Так же, в зависимости от модели, устройство может быть оснащено информативным дисплеем, осветительными приборами, индикаторами и другими дополнениями в виде ЮСБ-портов, динамиков, звуковых сигнализаторов и т.д.
Что ж, с комплектацией разобрались, а теперь рассмотрим сам принцип действия.
Интеллектуальное управление
В основу всего ложится гироскоп. Именно он отвечает за определение положения тела водителя в пространстве. Благодаря считыванию и обработке информации о размещении веса на специальной платформе, пользователь одним лёгким движением может заставить агрегат двигаться в любую сторону. Так, при небольшом наклоне вперёд, гаджет будет двигаться прямо. Отклоняясь назад, вы даёте ему команду замедлить ход или поменять направление на противоположное. Небольшое давление на левое или правое колесо заставит гироскутер повернуть. Остановка осуществляется при помощи возврата тела в исходное положение, то есть в вертикальную позицию. Конечно, на первый взгляд, все эти телодвижения могут показаться сложными и замысловатыми, но разработчики позаботились о том, чтобы сделать контроль над интеллектуальной техникой доступным на интуитивном уровне. Уже через 10 минут практики вы легко сможете проделывать все необходимые манёвры и поймёте, насколько просто совладать с устройством.
Автономность и другие прелести
Теперь поговорим о том, ради чего вообще стоит покупать гироцикл. В условиях постоянного роста цены на традиционные виды энергоносителей и топлива становится целесообразным рассмотрение вопроса о покупке более экономичного вида транспорта. Электричество стоит значительно дешевле бензина, да и современные батареи, которыми укомплектованы новомодные гироскутеры, заряжаются очень быстро. Так что поездки на подобных устройствах не ударят по карману, позволяя тратить деньги на более нужные и полезные вещи. К тому же, никто не отменял вопрос загрязнения экологии. Гаджет полностью безопасен для окружающей среды и не осуществляет вредных выбросов.
Отдельно скажем и о габаритах. Дороги Москвы с раннего утра и до самого вечера простаивают в пробках. Людям приходится часами добираться до работы и обратно. Компактные и манёвренные гироциклы призваны решить эту проблему. Развивая достойную скорость, они могут стать полноценной альтернативой автомобилям. Конечно, есть и некоторые ограничения, например, невозможность использовать девайс в плохую погоду или зимнее время, но они не столь существенны, как преимущества, получаемые в процессе использования. В общем, это изобретение действительно достойно внимание, и является серьёзным прорывом в сфере индивидуального транспорта.
КУПИТЬ ФИРМЕННЫЙ ГИРОСКУТЕР!
Гирокомпас от InnaLabs | «АВИ Солюшнс»
29 Января 2019
Компания InnaLabs – производитель инерциальных датчиков высокого качества, представляет гирокомпас, разработанный на основе технологии CVG (от англ. CVG – Coriolis Vibratory Gyroscope, кориолисов вибрационный гироскоп).
Гирокомпас или поисковик севера (от англ. North finder) – устройство, указывающее направление на земной поверхности, принцип действия которого основан на применении свойств гироскопа и вращения Земли.
В отличие от магнитного компаса, указывающего направление на магнитный меридиан, гирокомпас указывает на истинный (географический) Север с высокой точностью, в том числе и в условиях маневрирования и колебаний объекта. Гироскоп дает точные показания в зонах магнитных аномалий, его измерения не зависимы от магнитных девиаций. Благодаря этим преимуществам гирокомпас востребован во многих сферах применения, где требуется прецизионное позиционирование объекта, стабилизация или навигация.
Гирокомпас InnaLabs – это вибрационный кориолисов гироскоп с диапазоном измерения угловой скорости ±20 °/с, полосой пропускания ≥ 25 Гц, обеспечивающий точность указания направления на Север – 1 мрад.
- Стабильность дрейфа (при комнатной температуре) 0,05 ° / час
- Низкий выходной шум (≤ 0,004 °/с RMS при 100 Гц)
- Случайное угловое блуждание (0,003 °/√ч)
- Высокий уровень наработки на отказ (более 500 000 часов)
- Умеренная полоса пропускания (≥25 Гц)
- Высокая устойчивость к ударам (800 g)
- Интерфейс RS422
- Поиск истинного Севера
- Стабилизация платформ оптических систем и полезных нагрузок на борту самолета,
- наземных или морских подвижных объектов.
- Стабилизация систем наведения
- Системы компенсации наклона рельсов
- Промышленные системы управления
|
Гирокомпас без корпуса с аналоговым выходом |
|
|
Гирокомпас без корпуса с цифровым выходом |
|
|
Корпусированный гирокомпас с аналоговым выходом |
|
|
Корпусированный гирокомпас с цифровым выходом |
InnaLabs® – ведущий разработчик и производитель навигационных и тактических инерциальных датчиков. Сочетание редкого опыта разработки инерциальных датчиков мирового класса с высоким профессионализмом и технической поддержкой клиентов обеспечивает успешное решение сложных задач навигации, стабилизации и наведения в космических, авиационных, наземных и морских применениях. Техническая поддержка
В случае если необходима дополнительная консультация по продукции, наши технические специалисты постараются помочь вам решить возникшие вопросы. Для этого необходимо связаться с менеджером по продукции InnaLabs, либо позвонить по номеру 8 (812) 703-00-66, либо оставить заявку на сайте в разделе Запрос решения.
Предыдущая новость Следующая новость
Устройство гироскопа
Термин «гироскоп» имеет греческое происхождение, и сформировано от двух слов, которые, в переводе на русский язык означают «круглый» и «смотрю». Что касается смысла работы этого прибора, то он состоит в том, чтобы иметь возможность изменять свою ориентацию по определенным углам относительно некоей инерциальной системы отсчета.
Авторство названия этого прибора и самого термина приписывают Ж. Фуко, который впервые упомянул его в 1852 году в докладе, сделанном перед Французской Академией Наук. Само это сообщение было сделано для того, чтобы экспериментальным способом объяснить то, каким именно образом планета Земля вращается в инерциальном пространстве. Именно поэтому сам прибор и был назван словом «гироскоп».
Что касается принципов действия, то различают два основных типа гироскопов: механические и оптические.
Механические гироскопы
Среди приборов этого типа, пожалуй, наиболее интересным является гироскоп роторный, основой которого является, как нетрудно догадаться из самого названия, ротор, насаженный на ось, которая имеет возможность свободного изменения положения в пространстве.
Гироскоп механический
То свойство, за которое, собственно говоря, и ценят гироскоп, – это его способность при отсутствии воздействия на него моментов различных внешних сил сохранять направление вращения оси в пространстве. Основным определяющим в этом процессе является значение величины угловой скорости собственного вращения этого прибора.
С точки зрения конструкции, механические гироскопы представляют собой некие достаточно специфичные высокоточные приборы, которые собираются из немалого количества разнообразных высококачественных деталей, которые способны достаточно эффективно обеспечить их функционирование.
Гироскопы нашли достаточно широкое применение в различных технических устройствах. В подавляющем большинстве случаев используются те из них, которые размещаются в кардановом подвесе. Как правило, они имеют три степени свободы, то есть имеют возможность совершать вокруг своих осей три независимых поворота.
Для того чтобы надежно и с требуемой высокой скоростью обеспечить вращение ротора гироскопов, в их конструкциях используются специализированные гиромоторы. Кроме того, для обеспечения снятия данных с различных плоскостей гироскопов, применяются такие устройства, как датчики момента и датчики угла.
Одно из основных предназначений гироскопов – это их применение в качестве составных частей различных навигационных систем, в том числе и тех, что используются для стабилизации и ориентации различных космических аппаратов.
Оптические гироскопы
Эти приборы подразделяются на активные оптические (лазерные), интегрально-оптические, волоконно-оптические и пассивные оптические гироскопы.
Когда в направлении вращения прибора посылается луч света, а против этого направления отсчитывается определяемая интерферометром разница во времени прихода лучей, то оказывается возможным просчитать не только разницу оптических путей лучей, вычисленную в инерциональной системе отсчета, но и показатель углового поворота прибора.
Точно так же, как и механические, оптические гироскопы собираются из высокоточных деталей.
Применение волоконно-оптического гироскопа в инерциальных системах воздушных судов малой авиации
Библиографическое описание:Закиров, Р. Г. Применение волоконно-оптического гироскопа в инерциальных системах воздушных судов малой авиации / Р. Г. Закиров, О. Ш. Абдураимов. — Текст : непосредственный // Техника. Технологии. Инженерия. — 2017. — № 3 (5). — С. 19-22. — URL: https://moluch.ru/th/8/archive/62/2489/ (дата обращения: 08.05.2021).
В настоящее время малая авиация выходит из рамок, в которых она была заключена ранее: санитарный, связной, сельскохозяйственный или деловой. Соответственно, повышаются и требования к конструкции и оборудованию воздушных судов малой авиации. Это объясняется целым рядом обстоятельств в различных сферах промышленности и народного хозяйства:
1) Повышение механизации сельского хозяйства;
2) Усложнение бортового оборудования легких частных самолетов;
3) Новая тактика применения легких ВС в военном деле и службе МЧС; а также другими обстоятельствами.
Вышеперечисленные обстоятельства диктуют новые требования к пилотажно-навигационному комплексу (ПНК) самолета малой авиации.
Количество задач, решаемых ПНК легкого самолета, с каждым годом увеличивается, по функциональной и аппаратной сложности он приближается к ПНК тяжелых пассажирских и транспортных самолетов, но при этом должен иметь гораздо меньшие массу и габариты.
Из вышесказанного следует, что основная тенденция в развитии легких самолетов заключается не только в применении новых материалов в планере, но также и в дальнейшем увеличению функциональности ПНК.
Проблема реализации пилотажно-навигационных комплексов легких самолетов, отвечающих современным требованиям, особенно актуальна для Узбекистана. Наша страна имеет особые природно-климатические, экономические и прочие условия, при которых старые методы использования сельскохозяйственной авиации не применимы. И только одно обстоятельство бесспорно — с увеличившейся нагрузкой на пилота даже легкий самолет должен иметь полноценный пилотажно-навигационный комплекс, способный вести самолет в полностью автоматическом режиме. При всем этом, такой комплекс не претендует на попытку заменить пилота, но снижает рутинную нагрузку на него и улучшает безопасность полетов.
Одной из основных систем ПНК любого современного воздушного судна является инерциальная система, позволяющая измерять навигационные параметры воздушного судна –курс, крен, тангаж, истинную скорость и др. относительно системы координат, связанной с Землей (Рис.1).
Рис.1. Углы, определяющие ориентацию воздушного судна в пространстве.
Для измерения углов ориентации воздушного судна в пространстве в инерциальных системах воздушных судов применяется гироскоп.
До недавнего времени в системах навигации летательных аппаратов применялись механические гироскопы, работающие на основе эффекта удержания оси вращения тела в одном направлении инерциального пространства (Рис.2) [1]. Это, как правило, трехстепенные гироскопы, измеряющие крен, тангаж и курс воздушного судна.
Рис. 2. Устройство механического гироскопа
Цена механических гироскопов достаточно высока, так как для их корректной работы требуется высокая точность формы ротора и минимальное трение подшипников. Но, даже при выполнении этих требований, механические гироскопы достаточно недолговечны и ненадежны из-за износа трущихся частей. Кроме того, со временем у таких гироскопов появляется значительная погрешность измерения углов, влияющая на безопасность полета. Для ее уменьшения требуется производить частую поверку приборов с механическими гироскопами на стенде, что требует значительного расхода средств.
Из-за большой массы и габаритов, механические гироскопы нецелесообразно применять на самолетах малой авиации.
Недостатки механических гироскопов в значительной мере устраняются за счет применения оптических гироскопов. По сравнению с механическими они имеют следующие преимущества:
‒ отсутствие подвижных частей, что делает их более надежными;
‒ значительно более высокая чувствительность, а, следовательно, и более высокая точность измерения;
‒ высокая линейность характеристик;
‒ низкая потребляемая мощность;
Принцип действия большинства оптических гироскопов основан на измерении фазового сдвига между двумя волнами, пришедшими на оптический датчик различными путями. Фазовый сдвиг прямо пропорционален угловой скорости вращения, площади, охватываемой интерферометром, и частоте волны. Так как площадь и частота волны остаются неизменными во время работы гироскопа, следовательно, фазовый сдвиг пропорционален только угловой скорости [2].
В зависимости от конструкции замкнутого оптического контура различают два типа оптических гироскопов
1) Кольцевой лазерный гироскоп
2) Волоконно-оптический гироскоп
Конструкция кольцевого лазерного гироскопа показана на рис.3 Принцип работы таких гироскопов основан на разности частот двух генерируемых световых волн, распространяющихся в противоположных направлениях по треугольному оптическому пути, из-за разности оптической длины, проходимыми лучами из-за поворота гироскопа. В настоящее время кольцевые лазерные гироскопы являются наиболее распространенным типом гироскопов, применяемых в авиационных инерциальных системах (Inertial Reference System-IRS), выпускаемых компаниями Honeywell, Allied Signal, Rockwell Collins и др.
Рис. 3. Конструкция кольцевого лазерного гироскопа
Однако, несмотря на большую распространенность, кольцевые лазерные гироскопы также имеют ряд недостатков. К основным из них относятся:
- Нелинейность выходного сигнала при малой угловой скорости (влияние синхронизма).
- Колебания выходного сигнала из-за газовых потоков в лазере.
- Кольцевой лазерный гироскоп очень чувствителен к различного рода деформациям оптического волновода, вызванных тепловым расширением, изменением давления.
- Незначительное, по сравнению с механическими гироскопами, уменьшение массы и габаритов
Для устранения этих недостатков в инерциальных системах летательных аппаратов малой авиации предлагается использовать волоконно-оптический гироскоп.
Принцип действия волоконно-оптического гироскопа основан на эффекте Саньяка, который заключается в появление фазового сдвига встречных электромагнитных волн во вращающемся кольцевом интерферометре. [2]
Главными элементами такого гироскопа, являются излучатель (источник света), расщепитель луча (полупрозрачное зеркало), многовитковый замкнутый контур (катушка) из одномодового световода с малым затуханием и фотоприемник (Рис.4).
Изменение геометрических размеров интерферометра под влиянием центробежных сил, а также поперечный сдвиг встречных волн под действием центробежных сил, связанных с кривизной их траектории в интерферометре, можно не учитывать, так как увеличение площади кольца, вызванное данными факторами, очень незначительно, причем это увеличение одинаково для обеих встречных волн и, следовательно, не приводит к появлению разности фаз между ними [2].
.
Рис. 4. Схема волоконно-оптического гироскопа
В отличие от кольцевых лазерных гироскопов волоконно-оптические гироскопы измеряют угловую скорость, а не её приращение. Соответственно, волоконно-оптические гироскопы имеют следующие преимущества перед кольцевыми лазерными гироскопами:
‒ Конструктивно волоконно-оптический гироскоп выполнен в форме твердотельного прибора, что делает его более надежным и простым в эксплуатации.
‒ Этот гироскоп непосредственно измеряет скорость вращения, а не вычисляет ее на основе измерения приращения скорости, как кольцевой лазерный гироскоп.
‒ Чувствителен к обратному (реверсному) направления вращения.
‒ С высокой точностью измеряет малые угловые скорости.
Но самым главным преимуществом волоконно-оптического гироскопа является значительное по сравнению с другими типами гироскопов, уменьшение массы и габаритов, что вносит экономический эффект при проектировании БНК для воздушных судов малой авиации.
Для применения в летательных аппаратах необходимо использовать трехстепенной волоконно-оптический гироскоп, оси катушек которого ориентированы по вертикальной, продольной и поперечной осям воздушного судна.
Таким образом развитие разработок в области применения волоконно-оптических гироскопов в БНК является перспективным направлением.
Литература:
- Гироскоп // Википедия. URL: https://ru.wikipedia.org/wiki/ %D0 %93 %D0 %B8 %D1 %80 %D0 %BE %D1 %81 %D0 %BA %D0 %BE %D0 %BF (дата обращения: 12.05.2017).
- Волоконно-оптические гироскопы // dssp.petrsu.ru. URL: dssp.petrsu.ru/d/students/presents/2010/opto/prokopovich.pptx (дата обращения: 12.05.2017).
Основные термины (генерируются автоматически): гироскоп, волоконно-оптический гироскоп, малая авиация, кольцевой лазерный гироскоп, фазовый сдвиг, выходной сигнал, легкий самолет, угловая скорость, уменьшение массы, частота волны.
Похожие статьи
Построение АРД-диаграммы в программе Mathcad | Молодой ученый
гироскоп, волоконно–оптический гироскоп, малая авиация, кольцевой лазерный гироскоп, фазовый сдвиг, легкий самолет, выходной сигнал, угловая скорость, уменьшение массы, частота волны.
Дополнительные погрешности гироскопического интегратора…
Применение волоконно–оптического гироскопа в инерциальных… В настоящее время малая авиация выходит из рамок, в которых. Конструкция кольцевого лазерного гироскопа показана на рис.3 Принцип работы таких гироскопов основан.
Особенности распространения радиоволн на космических линиях…
Представлены результаты расчета скорости вращения вектора напряженности электрического поля в зависимости от частоты сигнала.
Они имеют отличительные друг от друга фазовые фронты, приводящие к повороту плоскости поляризации суммарной волны.
Автокомпенсационные методы
уменьшения влияния…Применение волоконно–оптического гироскопа в инерциальных… Принцип действия большинства оптических гироскопов основан на измерении фазового сдвига между двумя волнами, пришедшими на оптический датчик различными путями.
Авиационный глубиномер | Статья в журнале «Молодой ученый»
Применение волоконно–оптического гироскопа в инерциальных… Колебания выходного сигнала из-за газовых потоков в лазере. [2]. Главными элементами такого гироскопа, являются излучатель (источник света), расщепитель луча.
Влияние гауссовой кривизны подвеса поплавкового
гироскопа на…Для численного анализа используется расчетная модель, аналогом которой служит датчик угловых скоростей класса ДУС с жидкостатическим
Карачун, В.В. Дифракция звуковых волн на подвесе гироскопа / В.В.Карачун, В. Г. Лозовик, В. Н. Мельник ; Нац. техн. ун-т Укр. «КПИ».
Применение и перспективы использования легированных…
Уменьшение длины волны накачки вызывает переходы на более высокие энергетические уровни
Волоконно–оптический усилитель с пониженным уровнем шума. В этой среде сигнал на
длина волны, вынужденное рассеяние, индуцированное излучение, лазерное излучение…
Автономная система ориентирования беспилотного летательного…
Масса, г.
Измерение абсолютных значений углов наклона и крена возможно с помощью акселерометра, а гироскоп даёт значения углов наклона, крена и курса с погрешностью, из-за ухода «нуля» и ошибки интегрирования угловых скоростей.
Гамма излучение, инициируемое при работе теплогенератора на…
Принцип действия волоконно–оптического гироскопа основан на эффекте Саньяка, который заключается в появление фазового сдвига встречных электромагнитных волн во вращающемся кольцевом интерферометре.
Гироскопические летные инструменты – принципы, жесткость в космосе, прецессия
Гироскопические летные инструменты
Некоторые летные инструменты используют свойства гироскопа для своей работы. Наиболее распространенными приборами, содержащими гироскопы, являются координатор поворота, указатель курса и указатель ориентации. Чтобы понять, как работают эти инструменты, необходимо знать системы питания инструмента, принципы гироскопии и принципы работы каждого инструмента.
Принципы гироскопии
Любой вращающийся объект проявляет гироскопические свойства. Колесо или ротор, спроектированные и смонтированные для использования этих свойств, называются гироскопом. Двумя важными конструктивными характеристиками приборного гироскопа являются большой вес для его размера или высокая плотность, а также вращение на высокой скорости с подшипниками с низким коэффициентом трения.
Есть два основных типа креплений; используемый тип зависит от того, какое свойство гироскопа используется. Свободно или универсально установленный гироскоп может свободно вращаться в любом направлении относительно своего центра тяжести.Говорят, что такое колесо имеет три плоскости свободы. Колесо или ротор могут свободно вращаться в любой плоскости по отношению к основанию и уравновешены таким образом, что в состоянии покоя гироскопическое колесо остается в том положении, в котором оно установлено. Гироскопы с ограниченным или полужестким креплением – это гироскопы, установленные таким образом, что одна из плоскостей свободы удерживается фиксированной по отношению к основанию.
Есть два основных свойства гироскопического действия: жесткость в пространстве и прецессия.
Жесткость в пространстве
Жесткость в пространстве относится к принципу, согласно которому гироскоп остается в фиксированном положении в плоскости, в которой он вращается.Примером жесткости в пространстве является велосипедное колесо. По мере того, как колеса велосипеда увеличивают скорость, они становятся все более и более устойчивыми в своей плоскости вращения. Вот почему велосипед очень неустойчивый и очень маневренный на низких скоростях и очень устойчивый и менее маневренный на высоких скоростях.
Установив это колесо или гироскоп на набор карданных колец, гироскоп может свободно вращаться в любом направлении. Таким образом, если кольца кардана наклоняются, скручиваются или перемещаются иным образом, гироскоп остается в той плоскости, в которой он вращался изначально.[Рисунок 7-18] Рисунок 7-18. Независимо от положения его основания, гироскоп имеет тенденцию оставаться неподвижным в пространстве, а его ось вращения направлена в постоянном направлении.
Прецессия
Прецессия – это наклон или поворот гироскопа в ответ на отклоняющую силу. Реакция на эту силу не происходит в той точке, к которой она была приложена; скорее, это происходит в точке, которая на 90 ° позже по направлению вращения. Этот принцип позволяет гироскопу определять скорость поворота, определяя величину давления, создаваемого изменением направления.Скорость, с которой гироскоп прецессирует, обратно пропорциональна скорости ротора и пропорциональна отклоняющей силе.
На примере велосипеда прецессия действует на колеса, чтобы позволить велосипеду вращаться. При движении с нормальной скоростью нет необходимости поворачивать руль в направлении желаемого поворота. Всадник просто наклоняется в том направлении, в котором он хочет двигаться. Поскольку колеса вращаются по часовой стрелке, если смотреть с правой стороны велосипеда, если гонщик наклоняется влево, сила прикладывается к верхней части колеса слева.Фактически сила действует под углом 90 ° в направлении вращения, что приводит к приложению силы к передней части шины, заставляя велосипед двигаться влево. Есть необходимость поворачивать руль на малых скоростях из-за нестабильности медленно вращающихся гироскопов, а также для увеличения скорости поворота.
Прецессия также может вызывать незначительные ошибки в некоторых приборах. [Рис. 7-19] Прецессия может привести к смещению свободно вращающегося гироскопа из намеченной плоскости вращения из-за трения подшипника и т. Д.Некоторые приборы могут потребовать корректировки во время полета, например, указатель курса.
Рисунок 7-19. Прецессия гироскопа в результате приложенной отклоняющей силы.Летный механик рекомендует
Основные принципы теории гироскопа
3 rd Международная конференция и выставка по спутниковым и космическим полетам
11-13 мая 2017 г., Барселона, Испания
Рыспек Усубаматов
Кыргызский государственный технический университет, Кыргызстан
Основной доклад : J Aeronaut Aerospace Eng
Аннотация :Гироскопы – это основные устройства для систем навигации и управления в авиации, космосе, кораблях и других отраслях промышленности.Основным свойством устройства гироскопа является поддержание оси вращающегося ротора, для которого математические модели сформулированы по закону сохранения кинетической энергии и изменения углового момента. Тем не мение, известные математические модели эффектов гироскопа не соответствуют действительным силам и движению в процессе. Природа Свойства гироскопа более сложны, чем представляют современные теории. Недавние исследования продемонстрировали что гироскопы обладают четырьмя инерционными силами, взаимозависимыми и одновременно действующими на них.Эти силы являются внутренними кинетическими. энергии, генерируемые элементами массы и центром масс вращающегося ротора и представленные центробежными, Кориолисовыми и общие силы инерции, а также изменения углового момента. Приложенный крутящий момент создает моменты внутреннего сопротивления, которые основанный на действии центробежных сил и сил Кориолиса; и моменты прецессии, создаваемые общими силами инерции и изменение момента количества движения. Помимо этого, значительную роль играют силы трения, действующие на опоры гироскопа. в уменьшении внутренней кинетической энергии прядильного ротора.Новые математические модели эффектов гироскопа описывают четко и точно все известные и новые свойства гироскопа. Математические модели самых неразрешимых движений гироскоп с одной боковой опорой подтверждены практическими испытаниями. Сформулированные модели движений гироскопа представляют собой фундаментальные принципы теории гироскопа, основанные на действии внутренних центробежных, кориолисовых и инерционных сил, а также изменение углового момента, а также приложенных внешних сил и сил трения. Этот новый теоретический подход к гироскопу Проблемы представляют собой новый вызов инженерной науке.
Биография :Рыспек Усубаматов окончил МГТУ им. Н. Э. Баумана, получил степень доктора технических наук Академии наук Кыргызстана. Работал инженером-конструктором станков в машиностроительной компании. Он является профессором Кыргызского государственного технического университета и работал в университетах Малайзии. Он опубликовал более 300 статей в известных журналах, более 60 патентов на изобретения в области техники и семь книг в области машиностроения.Под его руководством было шесть докторов наук и несколько десятков магистрантов. Его исследовательские интересы включают «Теорию гироскопа и теорию производительности для промышленного проектирования».
Электронная почта: [электронная почта защищена]
Принцип гироскопа – чудеса инженерной мысли
Самолеты, военные корабли и торговые суда получили самые поразительные преимущества от применения гироскопа к различным приборам, но принцип гироскопа используется во многих областях техники.
БОЛЬШИНСТВО людей когда-то владели гироскопом. гироскоп, вообще в ранней молодости.Многие смогут вспомнить этот интересный игрушечный волчок в круглой оправе, которая при перемещении, вращении в руке придает «любопытный изгиб». Этот любопытный поворот – одно из проявлений многих специфических свойств быстро вращающегося колеса, или «гироскопа», если использовать его научное название. Принцип работы этого загадочного устройства позволяет большому железнодорожному вагону балансировать на одном рельсе. Гироскоп – это инструмент, который удерживает смертоносную торпеду прямо к цели, который управляет залпами из орудий могучего военного корабля.Гироскоп делает возможным создание беспилотного самолета, автоматического рулевого на борту корабля, гироскопа True North, гироскопа направления и гироскопа
GYROCOMPASS используется на судах любого типа. Гирокомпас торгового флота Sperry содержит одно гироскопическое колесо диаметром 10 дюймов. Он весит 55 фунтов и вращается со скоростью 6000 оборотов в минуту автономным асинхронным двигателем
Неоднократно в инженерной практике необходимо изучать и применять принципы гироскопического воздействия на сверх
Гироскоп состоит из гироскопа, вращающегося внутри ряда поворотных рам, расположенных аналогично подвесам судового компаса. Количество кадров может варьироваться в определенных пределах, чтобы давать разные степени «свободы вращения». Когда гироскоп вращается, он имеет одну степень свободы вращения. Если вал колеса будет помещен в раму, позволяющую поворачивать его, как флюгер, в любую точку горизонта, гироскоп будет иметь две степени свободы вращения.Три степени свободы достигаются за счет использования другой поворотной рамы, которая позволяет валу подниматься вверх на
Вращающийся гироскоп, который, таким образом, может свободно перемещаться в любом направлении, будет продолжать вращаться с его осью, «зафиксированной в пространстве», независимо от того, как смещаются опорные рамы. Он был оснащен быстро вращающимся колесом, установленным таким образом, что ученый Леон Фуко в 1852 году продемонстрировал вращение Земли. Поскольку инструмент проявлял это свойство, он назвал его гироскопом.
Это замечательное свойство гироскопа, который сопротивляется любой попытке изменить направление его оси вращения
Любое вращающееся тело, демонстрирующее вышеуказанные законы, может быть гироскопом – например, тяжелым колесом из садового тачки.Предположим, мальчик катит колесо от себя по тропинке; затем, нажав на левую ось
Опять же, ведущие колеса локомотива действуют как гироскопы. При огибании кривой оси (оси) spin-
Прецессия также играет важную роль в поведении различных типов судов в море и в воздухе. Колеса парохода представляют собой гироскоп и влияют на поведение судна в море. Когда судно катится влево (влево), колесо с этого борта погружается в воду глубже, чем колесо правого борта, и нос судна соответственно поворачивается на правый борт (вправо).В то же время прецессия вала лопасти имеет тенденцию поворачивать носовую часть влево, так что первое движение противодействует. Именно по этой причине лопастные пароходы качаются меньше, а наклон вперед и назад больше, чем винтовые отпариватели соответствующего размера. Лопастной пароход при повороте, скажем, влево под управлением руля направления будет из-за прецессии крениться вправо. Действие здесь похоже на движение локомотива на кривой.
В паровых пароварках
Однако именно в самолетах с одним двигателем
Когда, например, пилот отводит джойстик, а руль высоты поднимает носовую часть машины, прецессия карданного вала вызывает поворот вправо или влево в зависимости от направления вращения двигателя. Точно так же поворот влево или вправо будет сопровождаться соответствующим подъемом или опусканием носа машины.
Еще один вид гироскопа – это снаряд или пуля из нарезного ружья. Канавки в стволе орудия придают снаряду вращение, а поскольку ось вращения
Гироскопическое действие имеет еще один важный эффект в сочетании с сопротивлением воздуха, а именно «дрейф» вправо или влево от цели. Дрейф может варьироваться от ярда на расстоянии 1000 ярдов до, возможно, 2000 футов на расстоянии двадцати миль, и этот дрейф должен быть учтен при установке прицела.Должна быть сделана поправка на все гироскопические тенденции, существующие в машинах или устройствах, но когда гироскоп используется на службе у инженера, он имеет огромную ценность. Гиропульс в его раме, применяемый инженером в качестве управляющего устройства для машин, называется гиростатом.
СТАБИЛИЗИРУЮЩЕЕ ОБОРУДОВАНИЕ для итальянского лайнера Conte di Savoia весит 660 тонн. На фотографии изображено одно из трех огромных гиревых колес, установленных внутри корпуса.Колесо имеет диаметр 13 футов и вращается со скоростью 800 оборотов в минуту. Небольшое электрическое колесо гироскопа при прецессировании (или наклоне) из-за небольшого крена корабля запускает электродвигатель, который преобразует большой гироскоп, который оказывает огромное давление на цапфы кожуха, прикрепленные к корпусу корабля, тем самым корректируя крен.
Интересным применением гироскопа является управление военно-морскими торпедами. Вкратце, современная торпеда представляет собой длинную ракету в форме сигары
Функция гироскопического управления состоит в том, чтобы управлять вертикальными рулями направления и удерживать торпеду на расстоянии около 11000 ярдов от цели.Для этого используется то преимущество, что после того, как колесо гироскопа приводится в движение, оно может свободно двигаться во всех направлениях, а его ось будет указывать в одном направлении в пространстве. Существует много типов гироскопических механизмов управления торпедами, и детали большинства из них являются секретными, но нижеследующее иллюстрирует применение задействованных принципов.
В моторном отсеке торпеды находится гироскоп, установленный своей осью, направленной вперед
Сверху на внешней раме гиростата установлены диск и кулачок с упором. Остановка перекрывается двумя толкателями, установленными на шарнире, которые контактируют с диском и кулачком соответственно. Толкатели прикреплены к рычагу, который приводит в действие ряд рычагов, связанных с клапаном двигателя рулевого управления со сжатым воздухом
Гиростат, когда торпеда все еще находится в пусковой трубе, заблокирован, так что колесо может вращаться, но не может двигаться в рамах. Когда труба торпеды направлена в требуемом направлении, гиревое колесо запускается вспомогательным мотор-редуктором турбинного двигателя и вращается со скоростью около 10 000 оборотов в минуту, причем его ось направлена в требуемом направлении в пространстве.
Торпеда запускается зарядом кордита, и когда он достигает воды, гиростат разблокируется, вспомогательный двигатель автоматически снимается с гироскопа и заменяется струями сжатого воздуха
Интересной особенностью этого управления колесом гироскопа с его осью вращения
Существуют также устройства для управления торпедами, чтобы они могли стрелять под углом от цели (как из носовой трубы) и после бега по кривой траектории под заданным углом «выпрямлялись» »И бежать точно к своей цели. В этом типе механизма управления стрельба непрямого огня осуществляется поворотом кулачкового диска
ЗАКОН ПРЕЦЕССИИ показан на этой диаграмме.Когда колесо вращается на
Управление орудиями военного корабля, которые способны сбрасывать снаряды по цели на много миль. прочь – это вопрос высочайшей сложности.При обучении орудия необходимо учитывать не только гироскопический «дрейф» снаряда, но также вычислять скорость и курс корабля, цель и ветер. Крен корабля представляет собой одну из величайших проблем морских артиллеристов, потому что это влияет на высоту и, следовательно, на дальность стрельбы орудий, подготовленных за бортом для ведения огня залпом. Правильный подъем орудия достигается только в одной точке во время крена корабля.
Предположим, что военный корабль в сильном море заряжен и подготовлен к ведению залпа.Офицер управления огнем нажал на спусковой крючок ударно-спускового механизма. Огромные дула орудия медленно поднимаются по мере того, как корабль катится, и движение судна медленно приводит артустановки к правильному углу. Внезапно угол достигнут – крен также вывел орудия на правильную высоту. Тогда и только тогда, по команде гироскопического механизма управления, электрическая цепь замыкается, и залп разносится над морем на многие мили.
Современный морской гирокомпас – замечательно надежный инструмент, но его действие подвержено ряду естественных ошибок из-за изменений широты, скорости корабля, качки и других причин.Однако все эти ошибки устраняются с помощью механизма, так что компас ретранслятора показывает только показания истинного севера. Однако принцип, на котором работает оригинальный корректирующий гирокомпас
, сравнительно прост. Свободное колесо гироскопа вращается с осью, «зафиксированной в пространстве», но это не то же самое, что колесо, ось которого будет указывать вдоль меридиана долготы и, таким образом, указывать направление северного и южного полюсов Земли.
Вращающийся гироскоп можно установить таким образом, чтобы его ось совпадала с осью любого углового движения, которому он может быть подвергнут.В гирокомпасе вращение Земли обеспечивает угловое движение, которое заставляет ось гироскопа занять положение на одной линии с полюсами Земли, указывая тем самым на истинный север. Земля вращается в течение многих миллионов лет, но гирокомпас – единственное устройство, созданное руками человека, которое использует это вращение.
Современные морские гирокомпасы работают от электричества, и любое автоматическое рулевое устройство, которое может использоваться для управления, также является электрическим.Установив заданный курс, «автоматический рулевой» будет продолжать удерживать корабль на этом курсе без какого-либо вмешательства человека. Летательным аппаратом можно управлять аналогичным образом, за исключением того, что требуются два гироскопа, один горизонтальный, другой вертикальный, для управления соответствующими системами руля направления.
Одним из наиболее впечатляющих примеров гироскопического управления является стабилизирующая или противодействующая качению
В дополнение к большим гироскопам, есть маленькие электрические гироскопы, которые свободно перемещаются, также расположенные своими осями поперек оси.Когда корабль кренится, хотя бы на один градус, управляющий гироскоп прецессирует и замыкает электрическую цепь. Главный гироскопический двигатель немедленно запускается и выполняет предварительную обработку большого колеса, которое оказывает огромное давление на цапфы корпуса и тем самым корректирует крен.
АВТОМАТИЧЕСКИЙ ПИЛОТ будет держать самолет на заданном курсе на любом желаемом эшелоне полета.Два маленьких гироскопа, вращающиеся со скоростью 13 000 оборотов в минуту, управляют элеронами и рулем направления. Блок, который весит 60 фунтов, расположен за прямоугольной панелью управления в центре приборной панели. Относительное движение между гироскопами и их опорными элементами преобразуется в корректирующее движение самолета.
[Из части 26, опубликованной 24 августа 1937 г.]
Вы можете прочитать больше в «Авиационные двигатели», «Изготовление Гигантские пропеллеры »и« Стандарты точности »на этом веб-сайте.
Подробнее о «Савойе» можно прочитать в «Судоходных чудесах света».
Что они из себя представляют, как они работают и их значение
На первый взгляд гироскопы – довольно странные объекты. Они двигаются особым образом и, кажется, бросают вызов гравитации. Особые свойства этих устройств сделали их бесценным активом в самолетах, космических станциях и множестве других технологий, связанных с вращением.
Типичный самолет часто имеет целый набор таких устройств, включая важнейший компас.Космическая станция “Мир” фактически использовала 11 из них для ориентации относительно Солнца, и у телескопа Хаббла их тоже есть.
Источник : Rina / FlickrЧто такое гироскоп?
Согласно Оксфордскому словарю, гироскоп – это «устройство, состоящее из колеса или диска, установленного так, чтобы он мог быстро вращаться вокруг оси, которая сама может свободно менять направление. Ориентация оси не зависит от наклон крепления.”
Хотя это определение великолепно, оно на самом деле не объясняет, как они работают или почему они так важны (при условии, что мы немного урезали определение). Чтобы лучше понять это, нам сначала нужно иметь взгляните на их «странное поведение».
Профессиональные хитрости
Гироскопы, в их основной форме, представляют собой прялку или диск на оси. Более сложные примеры также будут установлены на металлической раме или на комплекте подвижные или неподвижные рамы (или подвесы) для повышения точности устройства.
Хотя на поверхности они кажутся простыми объектами, они могут выполнять некоторые очень странные трюки.
Когда колесо не вращается, гироскопы – это, по сути, чрезмерно сконструированные пресс-папье. Если вы попытаетесь встать, он просто упадет (очевидно). Ключ к ним – в их вращении.
Источник : Гордон Джоли / FlickrВозможно, вы играли с гироскопами в детстве? Может у вас есть спиннер непоседа? Если да, то вы вспомните, как они могут выполнять множество интересных трюков.Например, вы можете балансировать на веревке или пальце во время движения.
Еще одно примечательное их свойство, если вы когда-либо держали его в руках, – это то, что он будет пытаться сопротивляться попыткам сдвинуть свою позицию.
Вы даже можете наклонить его под углом, когда он подвешен на подставке, и он будет левитировать, хотя и вращается вокруг подставки. Еще более впечатляюще то, что вы можете поднять гироскоп с помощью веревки на одном конце.
Как работают гироскопы?
Объяснение этого явления сложно понять интуитивно.Их способность, казалось бы, игнорировать гравитацию, является продуктом углового момента, на который влияет крутящий момент на диске, например сила тяжести, для создания гироскопической прецессии вращающегося диска или колеса.
Источник: Берни Эммонс / FlickrЭто явление также известно как гироскопическое движение или гироскопическая сила, и оно действительно оказалось очень полезным для нас, людей. Эти термины относятся к тенденции вращающегося объекта, а не только гироскопа, сохранять ориентацию своего вращения.
Таким образом, вращающийся объект обладает угловым моментом, как упоминалось ранее, и его необходимо сохранять. Из-за этого вращающийся объект будет сопротивляться любому изменению своей оси вращения, поскольку изменение ориентации приведет к изменению углового момента.
Другой замечательный пример прецессии происходит и с планетой Земля. Как вы знаете, ось вращения Земли на самом деле лежит под углом к вертикали, которая из-за своего угла образует круг, когда сама ось вращения вращается.
Хотя это не совсем относится к этой статье, причина странного наклона Земли на самом деле довольно интересна.
Этот эффект тем сильнее, чем быстрее вращается диск или колесо, как предсказывает Второй закон Ньютона. Это кажется очевидным любому, кто имеет базовые знания физики.
Основная причина, по которой они, кажется, бросают вызов гравитации, – это эффективный крутящий момент, приложенный к вращающемуся диску, который влияет на его вектор углового момента. Влияние силы тяжести на плоскость вращающегося диска заставляет ось вращения «отклоняться».
Источник : Х. М. Диксон / Wikimedia CommonsВ результате вся ось вращения находит «золотую середину» между влиянием силы тяжести и собственным вектором углового момента. Теперь помните, что гироскоп не может упасть к центру тяжести из-за чего-то мешающего – например, вашей руки, рамы / стабилизатора или стола.
Теперь, если принять во внимание тот факт, что гироскоп останавливается от падения к центру тяжести из-за чего-то на пути, мы получаем удивительные свойства, которые мы видим в этих устройствах.
Картинка – ну видео – стоит тысячи слов, поэтому мы делегируем более подробное объяснение следующему видео:
Гироскоп и акселерометр: в чем разница между ними?
Чтобы полностью ответить на этот вопрос, нам необходимо оценить, как работает каждое устройство. Поскольку мы уже подробно рассмотрели гироскоп выше, давайте посмотрим, что такое акселерометр и как он работает.
Современный акселерометр LIS302DL, Источник : Adam Greig / FlickrВ словаре Merriam Webster акселерометр определяется как «прибор для измерения ускорения или для обнаружения и измерения вибраций.”
Отлично, но это не дает нам много информации. Акселерометры, в их самом основном смысле, представляют собой электромеханические устройства, которые измеряют силы ускорения – отсюда и название.
Эти силы могут быть статическими (например, сила тяжести) или динамический (вызванный движением или вибрацией устройства). Существуют различные способы изготовления акселерометра, в большинстве случаев использующие либо пьезоэлектрический эффект, либо чувствительную емкость.
Первые, как правило, состоят из микроскопических кристаллических структур, которые подвергаются воздействию ускоряющих сил и генерируют напряжение взамен.В последнем используются две микроструктуры, расположенные рядом друг с другом.
Каждая из них имеет определенную емкость, и по мере того, как ускоряющие силы перемещают одну из структур, ее емкость будет изменяться. Добавив схему для преобразования емкости в напряжение, вы получите очень полезный маленький акселерометр.
Источник: Misko / FlickrЕсть и другие методы, включая использование пьезорезистивного эффекта, пузырьков горячего воздуха и света, и это лишь некоторые из них. Итак, как видите, акселерометры и гироскопы действительно очень разные звери.
По сути, основное различие между ними состоит в том, что один может определять вращение, а другой – нет. Поскольку гироскопы работают по принципу углового момента, они идеально подходят для определения ориентации объекта в пространстве.
Акселерометры, с другой стороны, могут измерять только линейное ускорение на основе вибрации.
Однако есть некоторые варианты акселерометра, которые также включают гироскоп. Эти устройства состоят из гироскопа с грузом на одной из осей.
Устройство будет реагировать на силу, создаваемую весом, когда оно ускоряется, интегрируя эту силу для создания скорости.
Что такое оптические гироскопы?
Другой вид гироскопа – оптический гироскоп. Это устройство не имеет движущихся частей и обычно используется в современных коммерческих авиалайнерах, ракетах-носителях и орбитальных спутниках.
Кольцевой лазерный гироскоп, Источник: Британская энциклопедияИспользуя преимущество эффекта Саньяка, эти устройства используют лучи света, чтобы обеспечить функцию, аналогичную механическим гироскопам.Эффект был впервые продемонстрирован в 1911 году Францем Харрисом, но именно французский ученый Жорж Саньяк правильно определил причину.
Если луч света разделяется и направляется в двух противоположных направлениях по замкнутой траектории на вращающейся платформе с зеркалами по периметру, а затем лучи рекомбинируются, они проявляют интерференционные эффекты. В 1913 году Саньяк пришел к выводу, что свет распространяется со скоростью, не зависящей от скорости источника.
Он также обнаружил, что, несмотря на то, что оба луча находятся в замкнутом контуре, луч, движущийся в одном направлении вращения, прибыл в свою начальную точку немного позже, чем другой.
Согласно Британской энциклопедии, «в результате была обнаружена картина« интерференционных полос »(чередование светлых и темных полос), которая зависела от точной скорости вращения поворотного стола».
Правило правой руки
Ученые склонны использовать так называемое «правило правой руки», чтобы визуализировать это.
Для этого возьмите правую руку и сделайте прямой угол. Затем можно растянуть пальцы по радиусу колеса.
Если вы согнете кончики пальцев в направлении вращения, ваш большой палец будет указывать в направлении углового момента.По сути, ось колеса будет направлением, в котором все вращающееся колесо «хочет» двигаться.
Источник: остановите голубя! / FlickrЭто видео дает нам довольно простое объяснение с использованием подвешенного велосипедного колеса.
Применение гироскопов
Интересные свойства гироскопов предоставили ученым и инженерам несколько увлекательных приложений. Их способность сохранять определенную ориентацию в пространстве является фантастической для некоторых приложений.
Прикоснитесь к сенсорам, и вы получите рецепт полезности. Имея это в виду, вот несколько отличных примеров использования гироскопов в нашем современном мире.
1. В самолетах вы найдете множество гироскопов.
Источник: Алекс Бельтюков / Wikimedia CommonsВ современных самолетах инерционные системы наведения хорошо используют эти относительно простые устройства. У них есть набор вращающихся гироскопов для отслеживания и управления ориентацией самолета в полете. Вращающиеся гироскопы содержатся в специальных отсеках, которые позволяют им сохранять свою ориентацию независимо от ориентации самолета.
Клетки гироскопа имеют электрические контакты и датчики, которые могут передавать информацию пилоту, когда самолет катится или наклоняется. Это позволяет пилоту и системам наведения «знать» текущую относительную ориентацию самолета в пространстве.
2. Марсоход имеет также пару гироскопов.
Марсоход также имеет набор гироскопов. Они обеспечивают устойчивость марсохода, а также помогают в навигации. Они также применяются в самолетах-дронах и вертолетах для обеспечения устойчивости и помощи в навигации.
3. В крылатых и баллистических ракетах также используются гироскопы.
Источник: Per-Olof Forsberg / FlickrЕще одно интересное применение гироскопов – для систем наведения крылатых и баллистических ракет. Используемые для автоматического управления и корректировки крена, тангажа и рысканья, датчики гироскопов использовались для этой цели со времен немецких ракет Фау-1 и Фау-2 времен Второй мировой войны.
Как правило, ракеты для этого оснащены как минимум двумя гироскопами цель, при которой каждый гироскоп обеспечивает фиксированную опорную линию, от которой могут быть рассчитаны любые отклонения.Одна ссылка обычно включает ось вращения вертикального гироскопа.
От этой оси можно легко измерить отклонения по тангажу, крену и рысканью. Гироскопы также нашли применение в стабилизаторах прицелов, бомбовых прицелах и платформах для переноски орудий и радиолокационных систем на борту военных кораблей.
4. Гироскопы также можно найти в орбитальных космических аппаратах.
Еще одно интересное применение гироскопов – это инерциальные системы наведения орбитальных космических аппаратов. Такое маленькое судно требует высокой точности, когда дело доходит до стабилизации, и гироскопы в значительной степени идеально подходят для этой работы.
Есть несколько более крупных и тяжелых устройств, называемых импульсными колесами или реактивными колесами, которые также используются для контроля высоты некоторых более крупных спутников.
5. Часть «Звездных войн: Возвращение джедая» была снята с использованием гироскопов.
Источник: VidGames / YouTubeУстройство под названием «Стедикам» использовалось для съемок некоторых сцен в фильме Звездные войны: Возвращение Джедай (как и во многих других фильмах). Это устройство, используемое вместе с несколькими гироскопами, удерживало камеру стабильно при съемке фоновых снимков для знаменитой погони на спидер-байке на Эндоре.
Изобретенный Гарретом Брауном, он управлял установкой, чтобы пройти через лес из красного дерева, управляя камерой со скоростью один кадр в секунду . Когда отснятый материал был ускорен до 24 кадра в секунду , это создавало впечатление скоростного путешествия сквозь деревья.
Сегодня потомки Steadicam являются общей чертой многих кинопроизводств.
6. В вашем телефоне может быть слишком много одного
Гироскопы также нашли свое применение в различных потребительских товарах за последние несколько лет.Включение их в карманные устройства, такие как смартфоны, позволяет с высокой точностью определять движение в трехмерном пространстве.
Гироскопы обычно сочетаются с акселерометрами в современных смартфонах, чтобы обеспечить отличное определение направления и движения. Яркие примеры включают Samsung Galaxy Note 4, HTC Titan, iPhone 5s и т. Д.
Современные игровые консоли также имеют тенденцию включать в себя гироскоп в той или иной форме. Гироскопы – от пульта Wii до различных периферийных устройств для Playstation 3 и 4 – открыли совершенно новый способ играть в компьютерные игры.
7. Чтобы мы не забыли о дронах
Источник: PexelsЕще одно интересное применение гироскопов в нашей повседневной жизни – это дроны. Для того, чтобы эти устройства могли идеально летать, им необходимы гироскопы, среди прочего, чтобы они могли парить и летать по уровню.
Современные коммерческие дроны, как правило, используют трех- и шестиосные гироскопические стабилизаторы для предоставления навигационной информации контроллеру полета, что упрощает и повышает безопасность полета дронов.
И это все, ребята.
Несмотря на простоту конструкции, они стали незаменимыми элементами комплекта для чего угодно, от океанских кораблей до космических шаттлов и, конечно же, вертолетов.
В целом гироскопы просто невероятны, даже если вы не подозреваете, что они там есть. Удивительно, что такое простое устройство может иметь такие интересные и разнообразные приложения.
Хотя устройства относительно просты, они обладают фантастическими свойствами, которые ученые и инженеры использовали, чтобы сделать наш мир немного лучше.
Если эта статья пробудила ваше воображение и вы хотите иметь собственный гироскоп, есть множество интернет-магазинов, из которых можно выбрать. Как ты мог отказаться?
% PDF-1.7 % 34 0 объект > эндобдж xref 34 74 0000000016 00000 н. 0000002188 00000 н. 0000002373 00000 н. 0000002407 00000 н. 0000002942 00000 н. 0000003085 00000 н. 0000003519 00000 н. 0000004058 00000 н. 0000004465 00000 н. 0000004500 00000 н. 0000004611 00000 н. 0000004724 00000 н. 0000004749 00000 н. 0000005362 00000 н. 0000005918 00000 н. 0000006497 00000 н. 0000006930 00000 н. 0000007400 00000 н. 0000008469 00000 н. 0000008933 00000 н. 0000009433 00000 н. 0000009749 00000 н. 0000010173 00000 п. 0000010701 00000 п. 0000010979 00000 п. 0000011357 00000 п. 0000012337 00000 п. 0000013285 00000 п. 0000014260 00000 п. 0000015247 00000 п. 0000015386 00000 п. 0000016320 00000 п. 0000016466 00000 п. 0000017281 00000 п. 0000017985 00000 п. 0000022478 00000 п. 0000026015 00000 п. 0000026302 00000 п. 0000026768 00000 п. 0000030536 00000 п. 0000033185 00000 п. 0000033254 00000 п. 0000041632 00000 п. 0000045787 00000 п. 0000045883 00000 п. 0000064701 00000 п. 0000064968 00000 н. 0000065037 00000 п. 0000065121 00000 п. 0000076705 00000 п. 0000076985 00000 п. 0000077155 00000 п. 0000077180 00000 п. 0000077481 00000 п. 0000077550 00000 п. 0000077636 00000 п. 0000088412 00000 п. 0000088702 00000 п. 0000088887 00000 п. 0000088912 00000 п. 0000089220 00000 п. 0000091111 00000 п. 0000091463 00000 п. 0000091850 00000 п. 0000104509 00000 н. 0000104780 00000 н. 0000105189 00000 п. 0000105649 00000 п. 0000106071 00000 н. 0000106483 00000 п. 0000106888 00000 н. 0000107185 00000 п. 0000107370 00000 п. 0000001776 00000 н. трейлер ] / Назад 213786 >> startxref 0 %% EOF 107 0 объект > поток hb“e“_xb, ‘“ `5xpMS1) z * TG’D` X0D \\ @
Как работают гироскопы | Академия роботов
Последним компонентом блока измерения инерции являются датчики, измеряющие угловую скорость, обычно называемые гироскопами.Возможно, в детстве у вас был гироскоп в качестве игрушки, и трудно понять взаимосвязь между этим игрушечным гироскопом, который может балансировать на конце карандаша, с устройством, которое может измерять угловую скорость. Чтобы понять, как мы можем использовать гироскоп в качестве датчика угловой скорости, нам нужно вернуться к основам вращающихся тел. Здесь у нас есть диск, который вращается вокруг оси, показанной пунктирной линией, и вращается с угловой скоростью omega g, а диск имеет инерцию вращения j.Мы ссылаемся на угловой момент этого диска и обозначаем его символом h. h в j раз больше омега g. Теперь представим, что я прилагаю крутящий момент к этому вращающемуся диску. Если я это сделаю, диск захочет вращаться вокруг оси, показанной синей стрелкой. Это перекрестное произведение вектора h и вектора Tau.
У нас есть гироскоп, и на данный момент устройство не вращается, мы видим, что он очень свободно и красиво движется внутри своего карданного механизма. Если я включаю мотор, требуется немного времени, чтобы набрать скорость, теперь он ведет себя совсем по-другому.
Теперь я собираюсь повернуть узел вращающегося диска вокруг синей стрелки, а теперь; вращающийся диск будет оказывать крутящий момент вокруг красной стрелки, и этот крутящий момент является перекрестным произведением векторов омега и h. Итак, как мне измерить крутящий момент? Если ось диска поддерживается двумя подшипниками, то этот крутящий момент будет оказывать давление вверх на один подшипник и вниз на другой подшипник, и эти силы можно измерить. Затем вращающийся диск преобразует омега угловой скорости в крутящий момент, который затем измеряется с помощью датчиков силы.
Важно отметить, что если я потяну за эту ось гироскопа с помощью резиновой ленты, я фактически приложу к ней силу. Итак, я тяну в этом направлении. Вы увидите, что гироскоп пытается вращаться вокруг такой оси.
Датчики угловой скорости на основе вращающихся дисков уже не очень распространены. Они имеют тенденцию быть довольно громоздкими и требуют много энергии для вращения диска. Датчики сегодня основаны на вибрации, а не на вращающемся элементе, но мы все еще склонны называть их гироскопами или гироскопическими датчиками.Вибрирующие элементы изготавливаются с использованием технологии «MEMS». Таким образом, сами чувствительные элементы микроскопические по размеру, но принцип тот же. Угловая скорость в датчике вызывает приложение сил или крутящих моментов к элементам микромасштаба, что приводит к смещениям, которые можно измерить и усилить для получения сигнала угловой скорости. Как и в случае с акселерометрами и магнитометрами, очень часто три датчика гироскопа помещаются в один чип, и они снова располагаются ортогонально, так что они измеряют три компонента вектора угловой скорости.Точно так же, как у вас есть акселерометры в вашей голове, у вас также есть гироскопы в вашей голове, и, опять же, они находятся во внутреннем ухе. В частности, три очень отличительных элемента, известные как полукруглые каналы. Это очень тонкие трубки, наполненные жидкостью, и вращательное движение вашей головы заставляет жидкость в этих трубках двигаться. Движение жидкости обнаруживается крошечными волосковыми клетками внутри каналов, и это приводит к сигналу угловой скорости в ваш мозг. Сигнал угловой скорости сочетается с информацией о движении, поступающей от ваших глаз.Если эти два сигнала несовместимы, это приводит к проблеме, которую мы ощущаем как укачивание, когда наше внутреннее ухо говорит нам, что наше тело движется в одном направлении, но наши глаза говорят нам, что наше тело движется в другом направлении. способ. Итак, это укачивание или морская болезнь, и наше тело довольно нелогично реагирует, желая, чтобы нас рвало.
Понимание гироскопических приборов и принципов полета [видео]
Гироскопические инструменты и принципы гироскопии – стенограмма видеозаписи
Сегодня мы немного поговорим о гироскопических приборах.Чтобы обсудить, что именно мы собираемся обсудить, первое, что мы собираемся сделать, – это рассмотреть принципы работы гироскопа. Затем поговорим о каждом из инструментов по отдельности. Итак, мы поговорим об индикаторе курса, координаторе поворота и, наконец, об индикаторе ориентации. Итак, не торопитесь, и мы сейчас перейдем к этим принципам гироскопии.
Принципы гироскопии: жесткость в пространствеДля устойчивости в пространстве у нас есть небольшой мини-гироскоп, который мы увеличили.Что мы собираемся сделать, так это сделать это. Если у меня не будет вращаться колесо, а это значит, что оно не действует как гироскоп прямо сейчас, и я отпущу его, оно упадет. Мы знаем, что так и будет. Теперь, если я поверну его и превращу в гироскоп вот так, а теперь поставлю, вы заметите, что он больше не упадет. Вместо этого он останется неподвижным в пространстве. Таким образом, гироскоп просто будет держать его ровно на столе. Это жесткость в пространстве. Теперь перепрыгнем на другую сторону и немного поговорим о прецессии.
Принципы гироскопа: прецессияИтак, чтобы понять прецессию, у меня есть велосипедное колесо, прикрепленное к этой веревке. Обычно мы знаем, что если я буду держать колесо в вертикальном положении вот так и отпустить, очевидно, что оно вот так упадет. Это довольно легко объяснить. Мы знаем, что гравитация просто переворачивает ее вот так, чтобы она стала плоской. Теперь, если мы превратим это колесо в гироскоп, так что мы его раскрутим, а теперь я отпущу его, оно перевернется? Ответ – нет, он не перевернется.Вместо этого в этом случае он будет проходить вокруг кабеля. Это почему? Что ж, в этот момент колесо вращается в этом направлении, и концепция прецессии заключается в том, что сила, которая пытается опрокинуть колесо, здесь не ощущается, а вместо этого ощущается под углом 90 градусов в направлении вращения, что может вызвать колесо, чтобы не опрокинуться, а обхватить кабель. Мы можем дополнительно доказать это, и вместо того, чтобы вращать его таким образом, как мы, мы могли бы повернуть его в другую сторону, и он обработал бы противоположное направление.Итак, в обоих случаях это одна и та же концепция. Колесо вращается, а это означает, что эта сила действует в другой плоскости вращения. Поэтому вместо того, чтобы так вращаться, он поворачивается на 90 градусов в этом направлении. Теперь, когда у нас есть общее представление о том, как работают эти принципы гироскопа, давайте поговорим о том, как они применяются к каждому из конкретных летных инструментов.
Индикатор направленияТеперь мы поговорим о том, как эти принципы применимы к каждому из этих инструментов.Первый – индикатор заголовка. Что касается индикатора заголовка, мы представим, что наиболее важным элементом здесь является то, что он использует концепцию жесткости в пространстве. Таким образом, внутри указателя направления гироскоп не установлен сбоку, как то, что мы видели в начале видео, а вместо этого установлен вертикально, как это. Итак, этот гироскоп, когда-то вращающийся внутри инструмента, снова остается неподвижным в пространстве. Итак, концепция того, что происходит внутри указателя курса, заключается в том, что когда мы делаем повороты в самолете, гироскоп постоянно указывает в одном и том же направлении.Когда мы поворачиваемся, мы просто смотрим на это под разными углами. В конечном итоге это означает, что мы можем измерить, на сколько градусов мы повернулись вокруг этого гироскопа, и, следовательно, мы можем измерить, в каком направлении мы смотрим. Очевидно, что индикатор курса в этом примере тогда фактически не знал бы, в какую сторону направлен магнитный север, поэтому для нас было бы чрезвычайно важно всегда выравнивать инструмент с нашим магнитным компасом, чтобы гарантировать, что указанное направление, на которое мы начиная с обозначает северный магнитный полюс.
Координатор разворотаДалее идет координатор поворота. Прежде всего, координатор поворота использует эту концепцию прецессии внутри гироскопов, чтобы указать нашу скорость поворота. Так как же это сделать? На самом деле он измеряет силу поворота. Итак, если вы можете представить себе внутри координатора поворота, гироскоп установлен вот так, и когда он вращается, если мы поворачиваем самолет в одну или другую сторону, то произойдет то, что сила будет приложена на 90 градусов в направлении вращения, вызывая автожир так или иначе крениться.Этот крен – это то, что связано с маленьким самолетиком на координаторе разворота и показывает эту скорость поворота. Итак, на самом деле все, что происходит, – это мы измеряем количество силы или то, как быстро мы отклоняемся от этих различных заголовков. Чтобы объяснить это, если бы у нас был гироскоп, вращающийся таким образом, и, скажем, мы поворачиваем в этом направлении, поэтому, если мы так вращаемся, сила прикладывается здесь. Ну, это не будет ощущаться там, это будет ощущаться под углом 90 градусов в направлении вращения, а это значит, что этот гироскоп вот так опрокинется.Если этот гироскоп вот так перевернется, то мы знаем, что увидим, как маленькие крылья самолета вращаются в том же направлении. Это концепция того, как координатор поворота использует прецессию, чтобы указать нашу скорость поворота.
Индикатор отношенияИтак, последний наверху – индикатор отношения. Индикатор ориентации также использует принцип жесткости в пространстве, но работает немного иначе. Индикатор курса использовал жесткость в пространстве, как вы помните, просто для определения или измерения количества градусов, на которые мы поворачиваем вокруг гироскопа.А вот с индикатором ориентации гироскоп расположен так. Вместо того, чтобы быть вертикальным, он был таким горизонтальным, и мы фактически измеряем как наш угол крена, так и угол наклона вокруг этого инструмента. Итак, как мы можем это представить, если бы я летел, а гироскоп был здесь, в самолете, вот так, и, скажем, мы поднимаемся вверх, гироскоп останется неподвижным в космосе. Таким образом, гироскоп не будет двигаться, он останется ровным по отношению к поверхности Земли. Затем произойдет следующее: когда мы поднимем наш самолет, хвост опустится, нос поднимется вверх, и теперь я бы просто увидел этот гироскоп и смог измерить угловую разницу между корпусом прибора и этим гироскопом.