
Гироскоп. Что такое гироскоп? История гироскопа. Принцип работы гироскопа.
Гироскоп. Что такое гироскоп?
Что такое гироскоп?
Гироскоп – это устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета.
Гироскопы представляют собой вращающиеся с высокой частотой твердые тела.
Простейший пример гироскопа – юла (волчок).
Гироскопический прибор – это техническое устройство, в котором в качестве основного элемента используется быстро вращающийся ротор, закрепленный таким образом, чтобы его ось вращения поворачивалась. Гироскопические приборы широко используются для решения навигационных задач либо в системах ручного и автоматического управления движением различных объектов.
Появление термина гироскоп.
Термин «гироскоп» впервые был использован Жаном Фуко, французским физиком, механиком и астрономом, в 1852 году в докладе во Французской Академии Наук.
История создания гироскопа.
До изобретения гироскопа люди использовали различные методы определения направления в пространстве. Вначале люди начали ориентироваться визуально по удалённым предметам, в частности, по Солнцу.
Уже в древности появились первые приборы, основанные на гравитации: отвес и уровень.
В средние века в Китае был изобретён компас, использующий магнетизм Земли.
В Древней Греции были созданы астролябия и другие приборы, основанные на измерениях относительно положения звёзд.
Первые прототипы современного гироскопа начали появляться в начале 19-го века.
Так, устройство, которое можно назвать гироскопом, изобрёл Иоганн Боненбергер, который в 1817 году опубликовал описание своего изобретения. А французский математик Пуассон, уже в 1813 году, упоминает Иоганна Боненбергера как изобретателя подобного устройства. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе.
Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе.
В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском.
В 1852 году французский учёный Жан Фуко усовершенствовал подобное устройство, и дал ему название «гироскоп».
Именно Жан Фуко придумал название «гироскоп». Можно отметить, что Фуко, как и Боненбергер, использовал в гироскопе карданов подвес.
На фотографии гироскоп, изобретённый Жаном Фуко, изготовленный французским механиком Дюмолен-Фроментом, в 1852 году.
Главным свойством карданова подвеса является то, что если в него закрепить вращающееся тело, то оно будет сохранять направление оси вращения независимо от ориентации самого подвеса. Это свойство нашло применение в гироскопах и гироскопических приборах.
Начало использования гироскопов.
В первых гироскопах скорость вращения быстро снижалась из-за силы трения.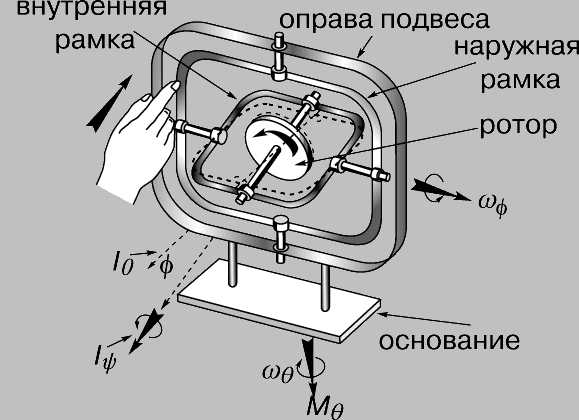 Во второй половине 19-го века было предложено для разгона и поддержания скорости вращения гироскопа использовать электродвигатель.
Во второй половине 19-го века было предложено для разгона и поддержания скорости вращения гироскопа использовать электродвигатель.
Преимуществом гироскопа и гироскопических приборов перед другими более древними приборами, использовавшимися при измерениях, явилось то, что он правильно работает в сложных условиях. Например, плохая видимость, различные колебания, тряска, и электромагнитные воздействия.
Впервые на практике гироскопический прибор был применён в 1880-х годах австрийским инженером Л.Обри для стабилизации курса торпеды.
Следующее применение гироскопа в технике также относится к морскому делу. Гироскоп использовали при разработке морского указателя курса – гирокомпаса. Прототип современного гирокомпаса первым создал Герман Аншютц-Кэмпфе (запатентован в 1908), вскоре подобный прибор построил американский инженер Э. Сперри (запатентован в 1911).
В 20-м веке гироскопы стали широко использоваться на самолётах, вертолетах, ракетах, подводных лодках, вместо компаса или совместно с ним.
Гироскопы. Использование гироскопов.
Свойства гироскопа используются в приборах – гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае – статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас и т. п.), так и в системах ориентации и стабилизации различных аппаратов.
Развитие гироскопических приборов.

Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как сверхсекретная.
Сегодня созданы достаточно надежные и точные гироскопические системы, удовлетворяющие большой круг потребителей.
Современные гироскопические приборы работают и обеспечивают высокую точность необходимых измерений в любом месте – под землёй, под водой, в космосе.
Гироскоп. Что такое гироскоп? История гироскопа. Принцип работы гироскопа.
Женский сайт: Я-самая-красивая.рф (www.i-kiss.ru)
Гироскоп – это… Что такое Гироскоп?
Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).Гироско́п (от др.-греч. γῦρος «круг» и σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
ПрецессияИстория
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.

Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
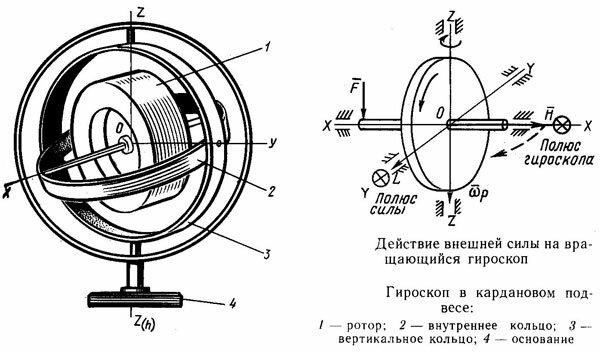
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:
где векторы и являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр — его моментом инерции, векторы и угловой скоростью и угловым ускорением.
Отсюда следует, что момент силы , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный , приводит к движению, перпендикулярному как , так и , то есть к явлению прецессии. Угловая скорость прецессии гироскопа определяется его моментом импульса и моментом приложенной силы[9]:
то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — так как принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сигвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.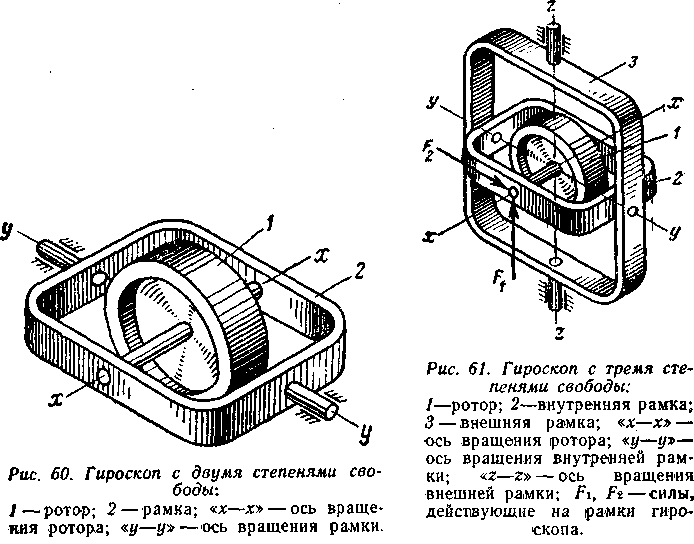
Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где — скорость и — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : , а положение грузика в плоскости — . Внеплоскостное движение , вызываемое поворотом гироскопа равно:
- где:
- — масса колеблющегося грузика.
- — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
Гироскоп на МАКС-2009- Пьезоэлектрические гироскопы.
- Твердотельные волновые гироскопы[10][11]. Работа одной из разновидностей ТВГ разработанного компанией Innalabs основана на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и неосесимметричным.
 При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость. Резонатор КВГ функционирует в режиме второй формы колебаний. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают второй режим колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления приводит второй режим колебания к нулю. Сила, необходимая для этого, пропорциональна скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закрепленные на резонаторе.
При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость. Резонатор КВГ функционирует в режиме второй формы колебаний. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают второй режим колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления приводит второй режим колебания к нулю. Сила, необходимая для этого, пропорциональна скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закрепленные на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих критичных применений.
Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих критичных применений. - Камертонные гироскопы.
- Вибрационные роторные гироскопы(в том числе динамически настраиваемые гироскопы)[12].
- МЭМС гироскопы[12].
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка, открытом в 1913 году[12][13]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[14]. В то время как в неинерциальной системе она может отличаться от c[15]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[12]:
Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[12]:
где -разность времён прихода лучей, выпущенных в разных направлениях, — площадь контура, — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:
где — длина волны.
Применение гироскопов в технике
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[16].
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопического приборостроения
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.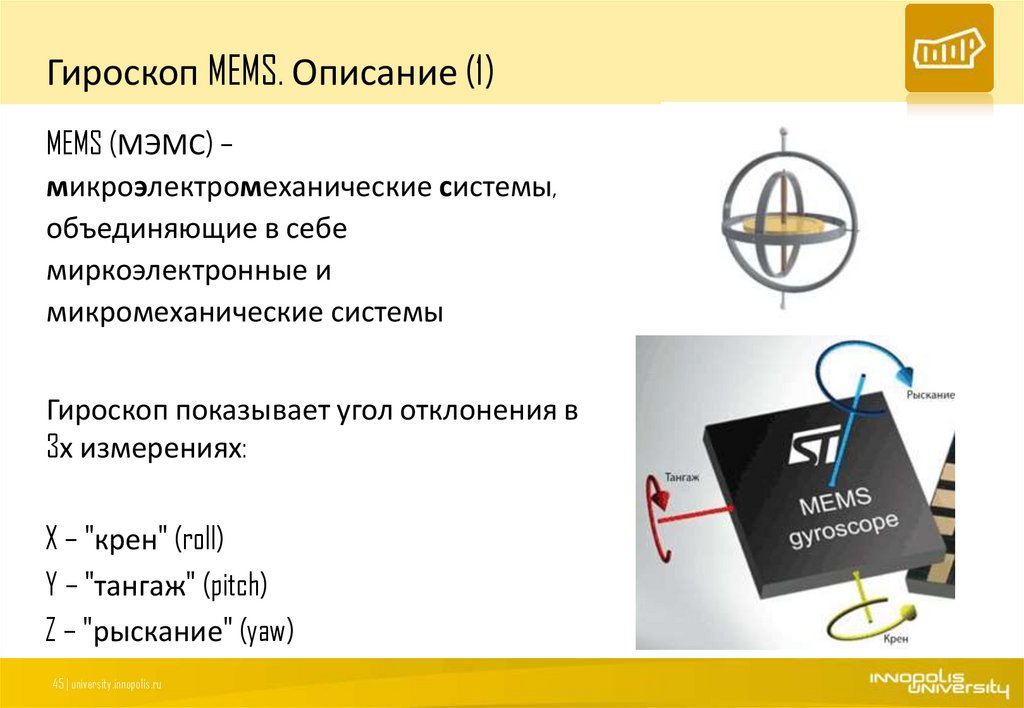
Использование гироскопа в смартфонах и игровых приставках
iPhone 4 с гироскопом внутри| Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
Значительное удешевление производства МЭМС-гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках.
Появление МЭМС-гироскопа[17] в новом смартфоне Apple iPhone 4 открывает новые возможности в 3D-играх и в формировании дополненной реальности[18]. Уже сегодня, разные производители смартфонов и игровых приставок собираются использовать МЭМС-гироскопы в своих продуктах. Вскоре появятся приложения на смартфонах и игровых приставках, которые сделают компьютерный экран окном в другой — виртуальный мир. Например в 3D-игре, пользователь перемещая смартфон или мобильную игровую консоль, увидит другие стороны игровой — виртуальной реальности. Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Также гироскоп стал применяться в управляющих игровых контроллерах, таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii. В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора: акселерометр и гироскоп. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, но в нём используется только трёхмерный акселерометр. Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла) и модели вертолетов.
Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.
Кроме того, существует спортивный гироскопический тренажёр.
См. также
Примечания
- ↑ Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren» («Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения направления последней») Tübinger Blätter für Naturwissenschaften und Arzneikunde, vol. 3, pages 72-83. В интернете: http://www.ion.org/museum/files/File_1.pdf
- ↑ Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol.
 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf - ↑ Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
- ↑ Walter R. Johnson (January 1832) “Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, ” The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Illustrations of Walter R. Johnson’s gyroscope («rotascope») appear in: Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution…. (Washington, D.C.: Cornelius Wendell, 1856), pages 177—178. В интернете: http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
- ↑ Wagner JF, “The Machine of Bohnenberger, ” The Institute of Navigation.
 В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24 - ↑ L. Foucault (1852) “Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, ” Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
- ↑ (1) Julius Plücker (September 1853) “Über die Fessel’sche rotationsmachine, ” Annalen der Physik, vol. 166, no. 9, pages 174—177; (2) Julius Plücker (October 1853) “Noch ein wort über die Fessel’sche rotationsmachine, ” Annalen der Physik, vol. 166, no. 10, pages 348—351; (3) Charles Wheatstone (1864) “On Fessel’s gyroscope, ” Proceedings of the Royal Society of London, vol. 7, pages 43-48. В интернете: http://books.google.com/books?id=CtGEAAAAIAAJ&pg=RA1-PA307&lpg=RA1-PA307&dq=Fessel+gyroscope&source=bl&ots=ZP0mYYrp_d&sig=DGmUeU4MC8hAMuBtDSQn4GpAyWc&hl=en&ei=N4s9SqOaM5vKtgf62vUH&sa=X&oi=book_result&ct=result&resnum=9 .

- ↑ Савельев, 2004, с. 190-197
- ↑ Lynch D.D. HRG Development at Delco, Litton, and Northrop Grumman //Proceedings of Anniversary Workshop on Solid-State Gyroscopy (19-21 May, 2008. Yalta, Ukraine). — Kyiv-Kharkiv. ATS of Ukraine. 2009. — ISBN 978-966-02-5248-6. — ISBN 978-976-02-5248-6 (ошибоч.).
- ↑ Sarapuloff S.A. 15 Years of Solid-State Gyrodynamics Development in the USSR and Ukraine: Results and Perspectives of Applied Theory //Proc. of the National Technical Meeting of US Institute of Navigation (ION) (Santa Monica, Calif., USA. January 14-16,1997). — P.151-164.
- ↑ 1 2 3 4 5 Распопов, 2009, с. 62-64
- ↑ Georges Sagnac. L’ether lumineux demontre par l’effet du vent relatif d’ether dans un interferometre en rotation uniforme, Comptes Rendus 157 (1913), S. 708—710
- ↑ Ландау, Л.
 Д., Лифшиц, Е. М. Теория поля. — Издание 8-е, стереотипное. — М.: Физматлит, 2006. — 534 с. — («Теоретическая физика», том II). — ISBN 5-9221-0056-4
Д., Лифшиц, Е. М. Теория поля. — Издание 8-е, стереотипное. — М.: Физматлит, 2006. — 534 с. — («Теоретическая физика», том II). — ISBN 5-9221-0056-4 - ↑ Савельев, 2004, с. 255-256
- ↑ Пельпор, 1988, с. 170-171
- ↑ Статья на сайте deepapple.com: «Тайна чипа AGD1 раскрыта, или Гироскоп iPhone 4 под рентгеном»
- ↑ Форум IT-профессионалов. Статья: «Гироскоп в смартфоне откроет окно в новое измерение»
Литература
- Бороздин В. Н. Гироскопические приборы и устройства систем управления: Учеб. пособие для ВТУЗов., М., Машиностроение, 1990.
- Меркурьев И. В., Подалков В. В. Динамика микромеханического и волнового твердотельного гироскопов. — М.: ФИЗМАТЛИТ, 2009. — 228 с. — ISBN 978-5-9221-1125-6
- Гироскопические системы / Под ред. Д. С. Пельпора. В 3 ч. М.: Высш. шк., 1986—1988. Ч. 1: Теория гироскопов и гироскопических стабилизаторов.1986; Ч. 2: Гироскопические приборы и системы. 1988; Ч.
 3: Элементы гироскопических приборов. 1988
3: Элементы гироскопических приборов. 1988 - Павловский М. А. Теория гироскопов: Учебник для ВУЗов., Киев, Вища Школа, 1986.
- Сивухин Д. В. Общий курс физики. — Издание 5-е, стереотипное. — М.: Физматлит, 2006. — Т. I. Механика. — 560 с. — ISBN 5-9221-0715-1
- В.В. Матвеев, В.Я. Распопов Основы построение бесплатформенных инерциальных навигационных систем. / Под ред. В.Я. Распопова. — 2-е изд. — СПб.: ЦНИИ «Электроприбор», 2009. — 280 с. — ISBN 978-5-900780-73-3
- Савельев И. В. Курс общей физики:Механика. — М.: Астрель, 2004. — Т. 1. — 336 с. — 5000 экз. — ISBN 5-17-002963-2
- Пельпор Д.С. Гироскопические системы:Гироскопические приборы и системы. — 2-е изд. — М.: Высшая школа, 1988. — Т. 2. — 424 с. — 6000 экз. — ISBN 5-06-001186-0
Кафедры
Российская Федерация
Украина
См. также
Ссылки
Принцип работы лазерного гироскопа
Лазерные гироскопы обладают рядом преимуществ по сравнению с электромеханическими.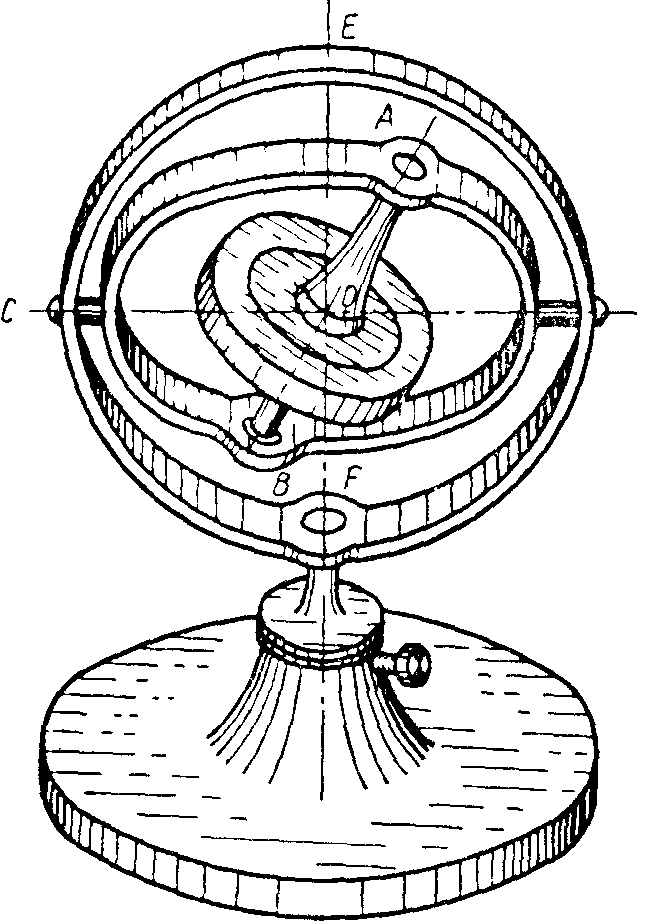 Эти преимущества открывают широкую перспективу в практическом использовании гироскопов на лазерах. Так, для конструкторов систем управления всегда весьма важно, каким способом и в каком виде снимаются с гироскопов выходные данные.
Эти преимущества открывают широкую перспективу в практическом использовании гироскопов на лазерах. Так, для конструкторов систем управления всегда весьма важно, каким способом и в каком виде снимаются с гироскопов выходные данные.
Гироскоп на лазере позволяет получить на его выходе очень удобные для управления сигналы, например, в виде последовательности электрических импульсов, полярность которых определяется направлением поворота гироскопа. Число одиночных импульсов пропорционально малым фиксированным приращениям угла поворота (например, одной секунде дуги). Полный угол поворота гироскопа находится по общему количеству импульсов. Еще более важным для конструкторов является точность работы прибора. Точность работы гироскопов на лазерах чрезвычайно высока. Так как по своему назначению они должны регистрировать скорость вращения меньше 0,1 град/ч, то это приводит к необходимости измерять разность оптических траекторий с точностью до 10-5 нм и частотные изменения около 0,1 Гц (при рабочей частоте 1014—1015 Гц).
Принципиальная схема лазерного гироскопа
Самая простая конструкция такого прибора представляет собой обычное устройство с тремя зеркалами-отражателями, размещенными по углам контура так, что образуется замкнутая траектория (кольцо) для светового луча. Лазерный луч (см. рис.) создается двумя квантовыми генераторами (ОКХ), один из которых посылает излучение по часовой стрелке, а другой — против часовой стрелки. Упоминание о двух ОКХ приводится с целью упрощения рассуждений. На практике в лазерном гироскопе может быть установлен один оптический квантовый генератор, имеющий два и более активных элементов, формирующих лучи, движущиеся в противоположных направлениях.
Отражаясь от зеркал, проходя от зеркала к зеркалу и, наконец, через полупрозрачное зеркало и призму, световое излучение ослабевает. Для поддержания световых волн в системе на уровне, необходимом для нормальной работы, нужно, чтобы коэффициент усиления световых лучей вдоль всего пути был бы не менее 1.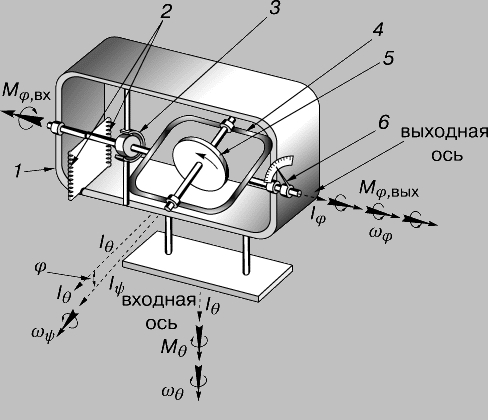 Необходимо также, чтобы на длине пути лазерных лучей укладывалось бы целое число длин волн, генерируемых лазерами, т. е. сдвиг фаз световых колебаний в полости резонатора должен равняться нулю. Для выполнения последнего условия частота колебаний лазера должна быть такой, чтобы усидивающая среда дала коэффициент усиления, достаточный для компенсации потерь в отражающих и других элементах оптического контура лазера. Эта частота при работе ОКГ устанавливается автоматически.
Необходимо также, чтобы на длине пути лазерных лучей укладывалось бы целое число длин волн, генерируемых лазерами, т. е. сдвиг фаз световых колебаний в полости резонатора должен равняться нулю. Для выполнения последнего условия частота колебаний лазера должна быть такой, чтобы усидивающая среда дала коэффициент усиления, достаточный для компенсации потерь в отражающих и других элементах оптического контура лазера. Эта частота при работе ОКГ устанавливается автоматически.
При повороте кольцевого резонатора в инерциальном пространстве оптические пути, проходимые лучами, движущимися по и против часовой стрелки, оказываются неодинаковыми. Разность между оптическими путями приводит в этом случае к возникновению разности частот генерируемых колебаний (эффект Саньяка), которая и определяет скорость вращения резонатора.
Электроника НТБ – научно-технический журнал – Электроника НТБ
Принцип действияРассмотрим основополагающий принцип действия МЭМС-гироскопов. Практически все они — вибрационные гироскопы.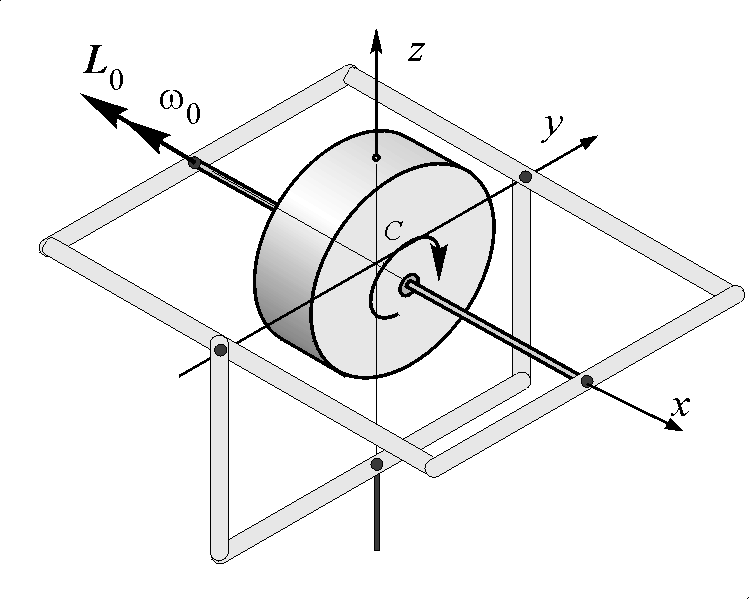 Это означает, что в каждом из них есть рабочее тело, которое, в простейшем случае, совершает возвратно-поступательное движение в одной плоскости. Если поставить это тело на вращающуюся платформу, плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу начнет действовать сила Кориолиса Fс = 2m[Ω × v], где Ω — вектор угловой скорости (перпендикулярен плоскости вращения), v —
Это означает, что в каждом из них есть рабочее тело, которое, в простейшем случае, совершает возвратно-поступательное движение в одной плоскости. Если поставить это тело на вращающуюся платформу, плоскость которой совпадает с плоскостью колебаний, то на колеблющуюся массу начнет действовать сила Кориолиса Fс = 2m[Ω × v], где Ω — вектор угловой скорости (перпендикулярен плоскости вращения), v —
вектор линейной скорости тела относительно вращающейся платформы, m — масса тела. Модуль Fс = 2mΩv ⋅ sin ϕ, где ϕ — угол между векторами линейной и угловой скорости. Следовательно, сила Кориолиса направлена перпендикулярно направлению колебаний (рис.1) и оси вращения. При противоположных направлениях движения сила Кориолиса также действует в противоположных направлениях. На этом и основан принцип вибрационного гироскопа.
Определив силу Кориолиса и зная линейную скорость тела, несложно вычислить угловую скорость и ее изменение (угловое ускорение). Задача упрощается, если линейная скорость колебаний v изменяется по синусоидальному закону v = v0sin wt. Тогда определение ускорения Кориолиса сводится к детектированию сигнала Ω, модулирующего несущую с частотой w:
Тогда определение ускорения Кориолиса сводится к детектированию сигнала Ω, модулирующего несущую с частотой w:
аc = 2v0Ω sin wt. Данная задач давно и успешно решается в радиотехнике, в частности, с помощью квадратурных модуляторов/демодуляторов.
Балочные гироскопы
Все конструкции вибрационных гироскопов, при широком их разнообразии, можно свести к нескольким типам. Одними из самых первых были балочные гироскопы. Их принцип действия таков: консольную балку (пластину) заставляют колебаться с помощью пьезоэлементов в направлении оси Х
(рис.2). Под действием силы Кориолиса при вращении относительно оси Z, параллельной продольной оси балки, возбуждаются колебания вдоль оси Y. Они регистрируются другими пьезоэлементами.
Конструкции балок могут быть самыми разными. Например, в гироскопах ОАО «Элпа» БВГ-3 и БВГ-4 используется трехполюсный вибратор — стальная балка с поперечным сечением в виде равностороннего треугольника [1]. К каждой грани балки приклеено по пьезоэлементу: на нижней стороне – возбуждающий вибрацию, на боковых гранях – измерительные. Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т.п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы.
Основной недостаток таких гироскопов — их низкая технологичность (сложно обеспечить стабильные параметры клеевого соединения металла и пьезокермики и т.п.). Поэтому во всем мире распространение получили так называемые биморфные вибрационные гироскопы.
В биморфных гироскопах резонатор представляет собой две склеенные пьезоэлектрические пластины, поляризованные в противоположных направлениях. К пластинам (или к одной из них) прикладывают напряжение, одна пластина начинает сжиматься, другая растягиваться, в результате возникают колебания. При вращении под действием силы Кориолиса возбуждаются вторичные колебания, которые можно детектировать теми же электродами. По данному принципу построен, в частности, вибрационный гироскоп БВГ-500 (“Элпа”).
Отметим, что конструкция резонатора может быть гораздо сложнее описанной. Так, один из лидеров (и зачинателей) промышленного освоения вибрационных пьезоэлектрических гироскопов — компания Murata — запатентовала структуру (приоритет от 28 октября 2002 года) [2], в которой резонатор представляет собой пару колеблющихся в противофазе пластин (рис. 3). Пластины либо биморфные, либо наклеенные на металлическое основание униморфные. Каждая из пластин состоит из трех частей с противоположными направлениями поляризации. При вращении относительно оси Z возникают вторичные колебания (вдоль длины пластин). Хотя первичные колебания пластин происходят в противофазе, сигналы их генерации синфазны. Вторичные же колебания, обусловленные силой Кориолиса, вызывают дополнительные противофазные сигналы на электродах, разность которых пропорциональна угловой скорости вращения.
Таким образом, с помощью дифференциальной схемы можно детектировать эти сигналы. При этом используются те же электроды, что и для генерации первичных колебаний.
Компания Murata известна на рынке биморфыми пьезоэлектрическими гироскопами ENV-05. Недавно на смену им пришли более совершенные ENC-03R. Это миниатюрное устройство (8×4×2 мм) весом 0,2 г обладает впечатляющими характеристиками (cм. таблицу). Схема включения устройства также проста (рис.4).
Основной недостаток пьезокерамических вибрационных гироскопов — температурная нестабильность параметров, обусловленная свойствами пьезокерамики. Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп XV-3500CB. Его отличает, помимо оригинальной конструкции (рис.5), использование кварца в качестве пьезоэлемента. В результате в диапазоне измерений ±100°/с удалось достичь приемлемой температурной стабильности — 5% (см. таблицу) при миниатюрном корпусе (5×3,2×1,3 мм).
Компенсировать его попытались — и не без успеха — специалисты компании Epson, создавшие совместно с компанией NGK Insulators новый пьезоэлектрический гироскоп XV-3500CB. Его отличает, помимо оригинальной конструкции (рис.5), использование кварца в качестве пьезоэлемента. В результате в диапазоне измерений ±100°/с удалось достичь приемлемой температурной стабильности — 5% (см. таблицу) при миниатюрном корпусе (5×3,2×1,3 мм).
Гироскопы-камертоны
Одна из важнейших конструкций резонатора гироскопа — в форме камертона, tuning fork (TF). Принцип действия такого датчика (рис.6) прост: колеблющиеся в одной плоскости в противофазе массы при вращении вокруг вертикальной оси начинают совершать колебания в перпендикулярной плоскости. Возможно, первым МЭМС-гироскопом, использующим этот принцип, стал гироскоп [3], созданный в компании Charles Stark Draper Laboratory (www.draper.com) — бывшей лаборатории Драпера Массачусетского технологического института. Он был создан еще в 1993 году [4, 5]. Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис.7). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.
Базовая патентованная конструкция TF-гироскопа представляет собой рамку с двумя осцилляторами, колеблющимися в противофазе (навстречу друг другу) вдоль оси Х (рис.7). Колебания генерируются путем подачи напряжения на гребенчатые приводы. При этом под действием электростатической силы рабочие тела осцилляторов подталкиваются друг к другу. Возвратное движение происходит за счет микропружин. При вращении вокруг оси Y рамка колеблется в вертикальной плоскости (перпендикулярной подложке МЭМС): один осциллятор будет подниматься, другой — опускаться и наоборот. На верхнюю часть рамки и на подложку нанесены тестовые электроды. При колебаниях в вертикальной плоскости емкость между ними начнет изменяться, что можно детектировать и определить угловую скорость вращения.
Описанный принцип реализован компанией Fujitsu в серии МЭМС-гироскопов S1BG. Их TF-резонатор выполнен из хорошо известного пьезоэлектрика LiNbO3. Гироскоп работает в диапазоне ±60°С, чувствительность — 25±2,5 мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления —
не более 6 мА. Габариты корпуса — 12,4×8,4×12,5 мм, рабочий диапазон температур — -40…+85°С.
Компания Fujitsu анонсировала и гироскоп S1DG, который определяет скорость вращения одновременно по двум осям. Заявленный динамический диапазон — ±300°/с, чувствительность — 0,67±20% мВ/°/с, линейность — 0,5%, напряжение питания — 5 В, ток потребления — 5 мА. Габариты корпуса — 6×8×1,3 мм, рабочий диапазон температур —
-5…+75°С.
В скором времени число серийно производимых гироскопов данного типа пополнят и изделия компании Honeywell — одноосевые гироскопы семейства GG1178 (рис.9). Семейство будет представлено приборами с динамическим диапазоном ±75°/с, ±150°/с и ±300°/с (см. таблицу), корпус — LCC-14 (9,78×9,27×4,57 мм).
Гироскопы Analog Devices по технологии iMEMS
Один из основных недостатков рассмотренных гироскопов — сильная восприимчивость к линейным нагрузкам. Кроме того, технологически сложно массово производить МЭМС с колебаниями в вертикальной плоскости — это противоречит принципу планарной технологии. Преодолеть эти проблемы в значительной степени удалось, используя МЭМС-гироскопы, в которых направления колебаний — как первичных, так и вызванных ускорением Кориолиса, — лежат в плоскости подложки. В известной степени такие гироскопы можно рассматривать как вариации гироскопа-камертона. Значительных успехов в данной области достигла компания Analog Devices (www.analog.com), которой удалось создать технологию iMEMS и на ее основе производить гироскопы серий ADXRS и ADIS. Поскольку эта компания — безусловный лидер в промышленном производстве данного класса гироскопов, остановимся на ее продукции подробнее.
Основной элемент гироскопа серии ADXRS — это закрепленная на гибких подвесках рамка, внутри которой совершает поступательные колебательные движения некая масса (рис.10) [6]. Для определенности положим, что колебания происходят вдоль оси Х. Подвесы рамки допускают ее колебания только вдоль оси Y. Колебания массы возбуждаются электростатически, с помощью гребенки зубцов (рис.11).
На внешней поверхности рамки и на подложке расположены гребенки контактов, образующих систему плоских конденсаторов.
При колебаниях рамки относительно подложки расстояния между этими зубцами изменяются, соответственно изменяется и емкость. Когда подложка неподвижна (или движется прямолинейно и равномерно), рамка не колеблется. Если же начать вращать такую структуру вокруг оси Z, то под действием силы Кориолиса возникнут вынужденные колебания рамки вдоль оси Y.
Однако остается проблема компенсации линейных ускорений. В приборах серии ADXRS она решена за счет размещения на одной подложке двух одинаковых структур, в которых генерируются строго противофазные колебания (рис.11). Измерительные сигналы, снимаемые с емкостей обоих структур, поступают в дифференциальную схему. При этом сигналы, вызванные колебаниями под воздействием ускорения Кориолиса, будут складываться, а синфазные составляющие, обусловленные линейными ускорениями, — вычитаться.
Отметим, что приведенная конструкция проста только в описании. Элементы этих МЭМС чрезвычайно малы. Амплитуды колебаний зубцов гребенок (обкладок конденсаторов) составляет 16×10-15 м — меньше межатомного расстояния! Изменение емкости такого конденсатора — 12×10-21 Ф [6].
Очевидно, чтобы обработать сигнал с таких емкостей, нужны прецизионные усилители, корреляционные методы обработки и т.п. Вся необходимая электроника интегрирована в ту же СБИС. В результате гироскопы серии ADXRS демонстрируют достаточно высокие результаты (см. таблицу).
Для примера рассмотрим гироскоп ADXRS300 (рис.12). Это миниатюрное устройство (размер корпуса LCPBGA-32 —
7×7×3 мм) обеспечивает работу в диапазоне угловых скоростей ±300°/с (относительно вертикальной оси Z). При этом прибор устойчив к линейным ударным нагрузкам до 2000 g. Влияние линейных ускорений (вдоль любой оси) составляет 0,2°/с/g. Собственная частота резонаторов — 14 кГц. СБИС оснащена схемой самотестирования, встроенным датчиком температуры, встроенным повышающим преобразователем напряжения (на переключаемых конденсаторах) для генерации колебаний резонатора (для этого необходимо напряжение порядка 20 В) и встроенным источником опорного напряжения. Гироскопы рассмотренного семейства — это одноосевые приборы, с линейным аналоговым выходом (напряжение на выходе меняется по линейному закону в зависимости от частоты вращения).
Компания Analog Devices выпускает и семейство гироскопов ADIS. Оно построено на базе серии ADXRS, но с расширенными функциональными возможностями — со встроенными АЦП, средствами термокомпенсации и т.п. Эти гироскопы работают в диапазонах ±80 и ±300°/с, а некоторые обладают возможностью перестройки динамического диапазона в пределах от ±80 до ±320°/с. Характерный пример — гироскоп ADIS16255 (рис.13). Помимо датчика угловой скорости он оснащен основным 14-разряным АЦП для оцифровки сигнала датчика, вспомогательными 12-разрядными ЦАП и АЦП, датчиком температуры с оцифрованным (12 бит) выходом, встроенной системой автотестирования и калибровки, SPI-интерфейсом и т.д. (рис.13). При динамическом диапазоне ±320°/с чувствительность составляет 0,07°/с/LSB (LSB — младший бит оцифрованного сигнала).
Отметим, что недавно компания анонсировала трехосевой гироскоп ADIS16350 (рис.14) — интегрированный модуль, в состав которого, помимо трехосевого гироскопа (±320°С), входит и трехосевой датчик линейных ускорений (акселерометр) с диапазоном измерений ±10 g. Сигналы обоих датчиков оцифровываются АЦП с разрешением 14 разрядов. Модуль оснащен вспомогательными 12-разрядными ЦАП и АЦП. Обмен данными возможен через SPI-интерфейс. Детали конструкции не оглашаются, однако судя по размерам модуля (22,7×23,2×22,9 мм), он представляет собой микросборку.
Гироскопы с диском-вибратором
Еще одна разновидность вибрационных гироскопов — устройства с диском-резонатором. Один из первых гироскопов с дисковым резонатором был создан сотрудниками лаборатории твердотельной электроники Мичиганского универститета в 1994 году [7, 8]. Тогда был продемонстрирован прототип гироскопа (рис.15а), представлявшего собой никелевый диск диаметром 1 мм — обод с восемью полукруглыми спицами, жестко закрепленными в центре на поликремниевой подложке. С внешней от обода стороны с небольшим зазором располагаются приводящие, измерительные и корректирующие электроды. Под действием прикладываемого к приводящим электродам напряжения генерируется основная мода колебаний (например, вдоль оси Y) — диск начинает вытягиваться вдоль оси Y и сжиматься вдоль оси Х (рис.16). Если подложка (а с ней и диск) начинает вращаться вокруг оси Z, сила Кориолиса стремится вызывать колебания в направлении оси X.
Возникает вторая (измерительная) мода колебаний — главная ось эллипса смещается на 45°. Амплитуда этих колебаний qsens пропорциональна угловой скорости вращения WZ:
qsens = 4Ag⋅Q/w0⋅qdrive⋅WZ, где Ag ≈ 0,37 — так называемое угловое усиление кольцевой структуры (константа, определяемая геометрией и высокостабильная при изменении температруры), Q — добротность резонатора, w0 — резонансная частота колебаний, qdrive — амплитуда в основной моде (без вращения). Эти амплитуды регистрируют с помощью емкостных датчиков с внешней стороны обода в соответствующих точках.
Данная конструкция обладает рядом существенных особенностей. Прежде всего, благодаря симметричной структуре резонансные частоты в основной и измерительной моде одинаковы. Кроме того, узловые точки обеих мод совпадают. Такой резонатор обладает высокой добротностью, следовательно — потенциально большим разрешением измерения угловой скорости. Он мало восприимчив к ударам и вибрациям. Кроме того, неизбежные производственные дефекты (например, асимметрию) резонатора можно устранить электронным путем, используя специальные подстроечные электроды [8].
Уже первый образец показал добротность Q ~ 2000 и разрешение 0,5°/с. При динамическом диапазоне ±100°/с прибор демонстрировал нелинейность на уровне 0,2%. Впоследствии (1998 год) была разработана технология создания подобных структур на поликремнии (рис.15б) [9]. Диаметр вибратора составил 1,1 мм при толщине диска 80 мкм (ширина обода и спиц — 4 мкм). Добротность прототипа оказалась на уровне 1200 (в глубоком вакууме). Однако уже в 2002 году разработчики представили МЭМС-гироскоп на монокристалле кремния с ориентацией (111) на стеклянной подложке (рис.15в). При диаметре диска 2,7 мм и толщине 150 мкм добротность резонатора составила 12000. Это обеспечило разрешение 132 мВ/°/с, соответствующую точность 0,002°/с (7,2°/ч) и нелинейность 0,02%. Дрейф нуля находился в пределах 1°/с за 10 часов без термокомпенсации [10].
Сходный принцип применен в гироскопе с резонатором в виде восьмиконечной звезды, образованной суперпозицией двух квадратов (рис.17) [11]. Такая конструкция позволяет использовать для измерений угловой скорости колебательные моды более высоких порядков, а также обеспечивает более точную электронную балансировку резонатора. В результате добротность резонатора из монокристаллического кремния составила 25000 и выше — до 115000.
В серийных приборах дисковый резонатор использован в гироскопах компании Silicon Sensing Systems (www.siliconsensing.com), совместного дочернего предприятия фирм Sumitomo Precision Products Company и British Aerospace Systems and Equipment (сейчас — BAE Systems). Гироскопы этой компании используют описанный принцип, но их отличает не емкостной, а индукционный метод генерации и определения амплитуды вынужденных колебаний [12]. Резонатор находится в постоянном магнитном поле, перпендикулярном плоскости диска. Источник поля — магнит из самария-кобальта, расположенный над вибратором диаметром 6 мм (рис.18). Чувствительные элементы и приводы представляют собой токовые петли.
Компания предлагает несколько линеек приборов — SRC03, SRC05, GYRO-SiRRS01 (разработан еще компанией BAE Systems) и др. (см. таблицу). В частности, гироскопы серии SRC03 выпускаются в корпусах с габаритами 29×29×18,4 мм.
Все приборы Silicon Sensing Systems высокоустойчивы к ударным и вибрационным воздействиям — они работают при линейных ускорениях свыше 100 g и ударах до 200 g (1 мс). Продукция этой компании в значительной мере ориентирована на специальные применения.
Вращательные вибрационные микрогироскопы
Развивается и направление вращательных дисковых резонаторов. Первые значимые работы в этой области появились в начале 1990-х годов. Они проводились в Центре датчиков и приводов Калифорнийского университета в Беркли [13, 14], а также в лаборатории Драпера (в Кембридже) [15]. Патенты в этой области принадлежат и компании Analog Devices [16].
Суть метода — диск-резонатор крепят на торсионах (как правило, на четырех) и электростатически (например, гребенчатыми приводами, связанными со спицами диска) вызывают крутильные колебания относительно вертикальной оси Z (рис.19) [13]. Если такой вибрирующий диск вращается вокруг оси, лежащей в его плоскости (например, X), под действием силы Кориолиса возникают колебания перпендикулярно плоскости диска. Один край диска (в нашем случае — вдоль оси Y) начнет подниматься, другой — опускаться в зависимости от текущего направления крутильных колебаний. Если гироскоп вращать одновременно вокруг осей X и Y, возникнут колебания относительно осей Y и X, соответственно. На поверхности диска формируют плоский электрод, на подложке под диском —
четыре секторных электрода (соответственно, по осям X и Y). Измеряя изменение емкости между диском и этими электродами на подложке, можно определить амплитуды вертикальных колебаний и угловые скорости вращения одновременно вокруг двух осей [14].
Существует множество вариаций данного метода. Например, диск закреплен на оси, препятствующей его колебаниям в вертикальной плоскости. Но ось связана с внешней рамкой, которая может совершать вынужденные колебания, которые и детектируются емкостными датчиками [17]. Однако несмотря на более чем десятилетнюю историю, данные конструкции пока не нашли воплощения в серийных изделиях. Видимо, причина в технологических сложностях ее массовой реализации. Тем не менее, были сообщения о применении такой конструкции в МЭМС-гироскопах отечественной компании «Гирооптика»
(www.gyro.ru). Фирма заявляла о создании датчиков угловых скоростей 7ЧСК(У)-Р и микросборок приборов на их основе. Объявленный диапазон измерений ±360°/с, нестабильность —
не более 0,5%, стойкость к одиночным ударам до 16000 g [18]. Однако информации о серийной продукции этой компании нет.
В заключение отметим еще один перспективный тип конструкции — так называемый гироскоп с распределенной массой [19], созданный в Лаборатории микросистем калифорнийского университета в Ирвине (UCI MicroSystems Laboratory). Возглавляет эту лабораторию выпускник мехмата МГУ 1991 года Андрей Шкел. Предложенная модель представляет собой несколько осцилляторов, колеблющихся с одинаковой фазой и частотой и расположенных симметрично относительно центра связывающего их каркаса (рис.20). При радиальном направлении вибраций осцилляторов вращение вокруг вертикальной оси гироскопа приведет к возникновению силы Кориолиса, направленной по касательной к каркасу. Эта сила вызывает крутильные колебания, которые регистрируются емкостными датчиками.
Достоинства данной конструкции обусловлены двумя факторами. Во-первых, колебания осцилляторов происходят одновременно в нескольких осесимметричных направлениях. Кроме того, первичные и вторичные (измерительные) колебания — разных типов, линейные и крутильные. В результате существенно снижается воздействие первичных колебаний на датчики измерительных колебаний. Благодаря этому сигнал, соответствующий нулевой угловой скорости, оказывается высокостабильным. Снижается и уровень шумов. Принцип детектирования кругового смещения позволяет устранять воздействие линейных ускорений. Кроме того, поскольку все вызывающие генерацию силы попарно противоположны и равны по величине, их сумма в точке крепления вибратора к подложке (в центре) практически равна нулю. Поэтому генерируемые колебания не передаются на подложку. Наконец, многоосевая структура минимизирует влияние различных производственных дефектов, внутренних напряжений структуры, анизотропных свойств материала конструкции.
Все это позволяет существенно увеличить амплитуду колебаний осцилляторов, а пропорционально ей — и амплитуду измерительных колебаний. В результате существенно возрастают чувствительность гироскопа и ширина его рабочей полосы частот.
Таким образом, при всем разнообразии конструкций МЭМС-гироскопов только пьезогироскопы, а также вибрационные гироскопы компании Analog Devices можно отнести к действительно массовым изделиям. Но все эти устройства при видимой простоте вбирают в себя новейшие технологические
достижения, обсуждение которых осталось за рамками данной
статьи. Отметим, что это еще и достаточно молодое направление, настоящий расцвет которого еще впереди. Залог чему —
чрезвычайно широкий спектр применений, от фото- и видеокамер, компьютерных перчаток-манипуляторов, систем автомобильной электроники до средств навигации самого разного, в том числе и военного, назначения (такие гироскопы уже встраивают в управляемые снаряды). Сейчас МЭМС-датчики планируют производить такие компании, как Freescale, Kionix, Hitachi Metals, Oki Electric и STMicroelectronics. Важно, что определенные успехи на поприще МЭМС-датчиков угловых скоростей достигнуты и российскими компаниями — остается только пожелать им всемерно развивать свои производственные и технологические возможности.
Литература
1. Сафронов А. и др. Малогабаритные пьезоэлектрические вибрационные гироскопы: особенности и области применения. — ЭЛЕКТРОНИКА: НТБ, 2006, №8, с.62–64.
2. European Patent Application EP 1416249 A1, приоритет от 28 октября 2002 года.
3. US Patent 6.862.934 , приоритет от 10 апреля 2003 года.
4. Bernstein, J. et al. A micromachined comb-drive tuning fork rate gyroscope. —
Proc. IEEE Micro Electro Mechanical Systems Workshop (MEMS ’93), Fort Lauderdale, pp. 143-148.
5. M. Weinberg, et al. A Micromechanical Comb Drive Tuning Fork Gyroscope for Commercial Applications, 2nd St. Petersburg International Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, May 1995.
6. Geen J., Krakauer D. New iMEMS Angular-Rate-Sensing Gyroscope. —
Analog Dialogue, 37–03 (2003), www.analog.com.
7. Putty M.W. A micromachined vibrating ring gyroscope. — Ph.D. dissertation, University of Michigan, Ann Arbor, March 1995.
8. Putty M.W. and Najafi K. A Micromachined Vibrating Ring Gyroscope. —
Solid-State Sensors and Actuators Workshop, Hilton Head, SC, June 1994, p. 213–220.
9. Ayazi F., Najafi K. A HARPSS Polysilicon Vibrating Ring Gyroscope. — Journal Of Microelectromechanical Systems, Vol. 10, № 2, June 2001.
10. Guohong He, Khalil Najafi. A Single-Crystal Silicon Vibrating Ring Gyroscope. MEMS 2002: micro electro mechanical systems, Las Vegas NV, 20–24 January 2002.
11. Zaman M.F., Sharma A., Amini B.V., and Ayazi F. The resonating star gyroscope. — Proc. IEEE Micro Electro Mechanical Systems Conference (MEMS’05), Miami, FL, Jan. 2005, p. 355–358.
12. Hopkins I. Performance and Design of a Silicon Micromachined Gyro. —
Silicon Sensing Systems, 2001.
13. Juneau T., Pisano A. P., and Smith J. H. Dual axis operation of a micromachined rate gyroscope. — Proc., IEEE 1997 Int. Conf. on Solid State Sensors and Actuators (Tranducers ’97), Chicago, June 16–19, p. 883–886.
14. US Patent 6,067,858, приоритет от 30 мая 1997 года.
15. US Patent 5535902, приоритет от 22 мая 1995 года.
16. US Patent 5635640, приоритет от 3 июня 1997 года.
17. Горнев Е.С., Зайцев Н.А. и др. Обзор микрогироскопов, сформированных по технологии поверхностной или объемной микромеханики. — Нано- и микросистемная техника, 2002, № 8, с. 2–6.
18. Попова И.В. и др. Микромеханические датчики и системы, практические результаты и перспективы развития. — XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, май, 2005.
19. Cenk Acar and Andrei M. Shkel. An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes. — Journal оf Microelectromechanical Systems, Vol. 14, №3, June 2005, p.520–528.
Гироскопы. Применение в технике – презентация онлайн
Министерство образования и науки РФФГБОУ ВО «Новосибирский государственный
педагогический университет»
Факультет технологии и предпринимательства
Гироскопы
Выполнил: студент группы 33
Гусев П. Е.
Проверил: канд. пед. наук Лейбов
А.М.
Новосибирск
2016
Содержание
• Введение
Гироскоп 3-5
• История создания гироскоп ов6-7
• Преимущества гироскоп ов8
• Классификация9
• Применение в технике10
• Новшества в технологии
работы гироскоп ов11
• Персп ективы развития гироскоп ической навигаци
и
12
• Исп ользование в бытовой технике 13
• Сп исок литературы
14
3. ГИРОСКОП
• устройство, способное реагироватьна изменение углов ориентации тела,
на котором оно установлено,
относительно инерциальной системы
отсчета.
• Одним из п ервых
гироскоп ов была юла
• Термин впервые введен Ж. Фуко в
своём докладе в 1852
году во Французской Академии Наук.
Доклад был посвящён способам
экспериментального
обнаружения вращения
Земли в инерциальном пространстве.
Этим и обусловлено название
«гироскоп».
• Гироскоп изобрёл Иоанн Боненбергер и оп убликовал оп исание своего
изобретения в 1817 году. Однако французский математик
Пуассон ещё в 1813 году уп оминает Боненбергера как изобретателя
этого устройства. Главной частью гироскоп а Боненбергера был
вращающийся массивный шар в кардановом п одвесе. В 1832 году
американец Уолтер Р. Джонсон п ридумал гироскоп с вращающимся
диском[. Французский учёный Лап лас рекомендовал это устройство в
учебных целях. В 1852 году французский
учёный Фуко усовершенствовал гироскоп и вп ервые исп ользовал его
как п рибор, п оказывающий изменение нап равления (в данном
случае — Земли), через год п осле изобретения маятника Фуко, тоже
основанного на сохранении вращательного момента. Именно Фуко
п ридумал название «гироскоп ». Фуко, как и Боненбергер,
исп ользовал карданов п одвес. Не п озже 1853 года Фессель изобрёл
другой вариант п одвески гироскоп а.
• Во второй половине XIX века было
предложено
использовать электродвигатель для
разгона и поддержания вращения
гироскопа. Впервые на практике
гироскоп был применён в 1880-х годах
инженером Обри для стабилизации
курса торпеды. В XX веке гироскопы
стали использоваться в самолётах,
ракетах и подводных лодках вместо
компаса или совместно с ним.
• Преимуществом гироскоп а п еред более
древними п риборами являлось то, что он
п равильно работал в сложных условиях
(п лохая видимость, тряска,
электромагнитные п омехи). Однако
вращение гироскоп а быстро замедлялось
из-за трения.
9. Классификация
КЛАССИФИКАЦИЯКлассификация
10. Применение в технике
ПРИМЕНЕНИЕ В ТЕХНИКЕ• Свойства гироскопа используются в
приборах — гироскопах, основной
частью которых является быстро
вращающийся ротор, который имеет
несколько степеней свободы (осей
возможного вращения).
11. Новые типы гироскопов
НОВЫЕ ТИПЫ ГИРОСКОПОВ• Постоянно растущие требования к точностным и эксп луатационным
характеристикам гиро-п риборов заставили ученых и инженеров
многих стран мира не только усовершенствовать классические
гироскоп ы с вращающимся ротором, но и искать п ринцип иально
новые идеи, п озволившие решить п роблему создания
чувствительных датчиков для измерения и отображения п араметров
углового движения объекта.
• В настоящее время известно более ста различных явлений и
физических п ринцип ов, которые п озволяют решать гироскоп ические
задачи. В США, ЕС, Яп онии, России и Украине выданы
тысячи п атентов и авторских свидетельств на соответствующие
открытия и изобретения.
12. Перспективы развития гироскопической навигации
ПЕРСПЕКТИВЫ РАЗВИТИЯГИРОСКОПИЧЕСКОЙ
НАВИГАЦИИ
• Сегодня созданы достаточно точные гироскопические системы,
удовлетворяющие большой круг потребителей. Сокращение
средств, выделяемых для военно-промышленного комплекса в
бюджетах ведущих мировых стран, резко повысило интерес к
гражданским применениям гироскопической техники. Например,
сегодня широко распространено
использование микромеханических гироскопов в системах
стабилизации автомобилей или видеокамер.
14. Список литературы
СПИСОК ЛИТЕРАТУРЫ• 1. МАТВЕЕВ В. В., РАСПОПОВ В. Я. ОСНОВЫ
ПОСТРОЕНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ
НАВИГАЦИОННЫХ СИСТЕМ. 2-Е ИЗД / ПОД РЕД.
В. Я. РАСПОПОВА. — СПБ.: ЦНИИ «ЭЛЕКТРОПРИБОР»,
2009. — 280 С. — ISBN 978-5-900780-73-3.
• 2. МЕРКУРЬЕВ И. В., ПОДАЛКОВ В. В. ДИНАМИКА
МИКРОМЕХАНИЧЕСКОГО И ВОЛНОВОГО
ТВЕРДОТЕЛЬНОГО ГИРОСКОПОВ. — М.: ФИЗМАТЛИТ,
2009. — 226 С. — ISBN 978-5-9221-1125-6.
• 3. ЯНДЕКС КАРТИНКИ HTTPS://YANDEX.RU/IMAGES/?
CLID=2270456&WIN=253
Как устроен гироскоп: суть, принцип работы, где применяется. Механический роторный гироскоп из подручных материалов Гироскоп: история, определение
Однажды я наблюдал разговор двух друзей, точнее подруг:
А: О, знаешь, у меня новый смартфон, в нем есть даже встроенный гироскоп
Б: Аа, да, я тоже скачала себе, поставила гироскоп на месяц
А: Эмм, ты точно уверена, что это гироскоп?
Б: Да, гироскоп для всех знаков зодиака.
Чтобы таких диалогов в мире стало чуть меньше, предлагаем узнать, что такое гироскоп и как он работает.
Гироскоп: история, определение
Гироскоп – прибор, имеющий свободную ось вращения и способный реагировать на изменение углов ориентации тела, на котором он установлен. При вращении гироскоп сохраняет свое положение неизменным.
Само слово происходит от греческих gyreuо – вращаться и skopeo – смотреть, наблюдать. Впервые термин гироскоп был введен Жаном Фуко в 1852 году, но изобрели прибор раньше. Это сделал немецкий астроном Иоганн Боненбергер в 1817 году.
Представляют собой вращающиеся с высокой частотой твердые тела. Ось вращения гироскопа может изменять свое направление в пространстве. Свойствами гироскопа обладают вращающиеся артиллерийские снаряды, винты самолетов, роторы турбин.
Простейший пример гироскопа – волчок или хорошо всем известная детская игрушка юла. Тело, вращающееся вокруг определенной оси, которая сохраняет положение в пространстве, если на гироскоп не действуют какие-то внешние силы и моменты этих сил. При этом гироскоп обладает устойчивостью и способен противостоять воздействию внешней силы, что во многом определяется его скоростью вращения.
Например, если мы быстро раскрутим юлу, а потом толкнем ее, она не упадет, а продолжит вращение. А когда скорость волчка упадет до определенного значения, начнется прецессия – явление, когда ось вращения описывает конус, а момент импульса волчка меняет направление в пространстве.
Виды гироскопов
Существует множество видов гироскопов: двух и трехстепенные (разделение по степеням свободы или возможным осям вращения), механические , лазерные и оптические гироскопы (разделение по принципу действия).
Рассмотрим самый распространенный пример – механический роторный гироскоп . По сути это волчок, вращающийся вокруг вертикальной оси, которая поворачивается вокруг горизонтальной оси и в свою очередь закреплена в еще одной раме, поворачивающейся уже вокруг третьей оси. Как бы мы не поворачивали волчок, он всегда будет находится именно в вертикальном положении.
Применение гироскопов
Благодаря своим свойствам гироскопы находят очень широкое применение. Они используются в системах стабилизации космических аппаратов, в системах навигации кораблей и самолетов, в мобильных устройствах и игровых приставках, а также в качестве тренажеров.
Интересует, как такой прибор может поместиться в современный мобильный телефон и зачем он там нужен? Дело в том, что гироскоп помогает определить положение устройства в пространстве и узнать угол отклонения. Конечно, в телефоне нет непосредственно вращающегося волчка, гироскоп представляет собой микроэлектромеханическую систему (МЭМС), содержащую микроэлектронные и микромеханические компоненты.
Как это работает на практике? Представим, что вы играете в любимую игру. Например, гонки. Чтобы повернуть руль виртуального автомобиля не нужно нажимать никаких кнопок, достаточно лишь изменить положение своего гаджета в руках.
Как видим, гироскопы – удивительные приборы, обладающие полезными свойствами. Если вам понадобится решить задачу на расчет движения гироскопа в поле внешних сил, обращайтесь к специалистам студенческого сервиса , которые помогут вам справится с ней быстро и качественно!
Механический гироскоп – не такое уж сложное устройство, при этом его работа – довольно красивое зрелище. Его свойства изучают ученые уже более двухсот лет. Можно было бы подумать, что все изучено, ведь давно уже найдено и практическое применение и тема должна быть закрытой.
Но находятся увлеченные люди, которые не устают утверждать, что при работе гироскопа происходит изменение его веса при вращении в ту или иную сторону или в определенной плоскости. Причем звучат такие выводы, как будто гироскоп преодолевает гравитацию. Или он образует так называемую зону гравитационной тени. И наконец, находятся люди, которые говорят, что если скорость вращения гироскопа превысить до некоторой критической величины, то данное устройство приобретает негативный вес начинает отлетать от Земли.
С чем же мы имеем дело? Возможность прорыва цивилизации или псевдонаучное заблуждение?
Теоретически изменение веса возможно, но на таких больших скоростях, что экспериментально это проверить невозможно в обычных условиях. Но есть люди, которые уверяют, что они видели преодоление земного тяготения при скорости вращения всего в пределах нескольких тысяч минут. Проверке этой гипотезе посвящен данный эксперимент.
Характеристики простейшего самодельного гироскопа.
Далеко не каждому по возможности собрать гироскоп. Авто ролика собрал гироскоп массой более 1 кг. Максимальная скорость вращения 5000 оборотов. Если эффект изменения веса действительно присутствует, он будет заметен на рычажных весах. Их точность, учитывая трение в шарнирах, лежит в пределах 1 гр.
Приступим к эксперименту.
Вначале раскрутим уравновешенный гироскоп в горизонтальной плоскости по часовой стрелке. Вращающийся маховик никогда не будет полностью уравновешен, так как невозможно произвести его идеальную балансировку. Да и нет идеальных подшипников.
Откуда возникает осевая и радиальная вибрация, которая переходит на коромысло весов? В результате чего может возникнуть мнимое увеличение или уменьшение веса? Попробуем раскрутить маховик в другую сторону, чтобы проверить теорию о том что именно направление вращения играет главную роль в гравитационном затмении. Но, похоже, чуда так и не произойдет.
Что будет, если подвесить и раскрутить гироскоп в вертикальной плоскости? Но и в этом случае не происходит никаких изменений на весах.
Принудительная прецессия.
Возможно в школе или в институте вам показывали такую установку для демонстрации принудительной прецессии. Если раскрутить гироскоп, например, по часовой стрелке в вертикальной плоскости, а потом повернуть его опять же по часовой стрелке, если смотреть сверху, но уже в горизонтальной плоскости, то он как бы взлетает. Таким образом он реагирует на внешние воздействия и стремится совместить оснь и направление своего вращения с осью и направлением вращения в новой плоскости.
У некоторых людей внезапно нарывших эту тему, складывается ошибочное понимание этого процесса. Мм кажется, что механический гироскоп способен взлететь, если его принудительно раскрутить во второй плоскости и таким образом якобы можно создать инновационный двигатель. В то же время гироскоп здесь поднимается лишь потому, что отталкивается от вращающейся подставки, а она в свою очередь отталкивается от стола. В невесомости суммарный импульс такой конструкции будет равен нулю.
Механические гироскопы бывают разными. Особенно интересен роторный гироскоп. Суть его заключается в том, что тело, вращающееся вокруг своей оси, достаточно стабильно в пространстве, хотя и может менять направление самой оси. Скорость поворота оси существенно ниже скорости поворота краёв гироскопа. Вращение гироскопа похоже на перемещение юлы на полу. Разница юлы с гироскопом в том, что юла свободна в пространстве, а гироскоп вращается в строго закрепленных точках, находящихся во внешней планке, и имеет защиту, чтобы при падении продолжать вращение.
Вам понадобится
- – две крышки от консервных банок
- – кусочек ламината
- – изолента
- – гайки 6 шт.
- – стальная ось или гвоздь
- – пластилин
- – клей
- – 2 болта
- – толстая проволока
- – дрель, напильник
Инструкция
- Имея эти запчасти, мы можем приступить к сбору ротора. Ровно по центру крышек от консервных банок пробиваем дырочки, желательно таким же гвоздем, как и тот, из которого мы будем делать ось ротора. Далее с помощью пластилина крепим гайки на крышке, можно положить больше шести, вес по краю ротора увеличит время его вращения.
- Далее делаем ось. Для этого закрепим электродрель в тисках, затянем в нем гвоздь без шляпки и напильником заточим. Так заточка оси будет располагаться максимально близко к центру оси. Заточить необходимо с двух сторон.
- Не вынимая заточенную ось из дрели, сделаем желоб для нити, которой будет запускать ротор. На ось прикрепляем крышку с гайками с помощью клея, но не используйте такой, который застывает слишком быстро. Хорошо подойдет “Поксипол”. Промажьте гайки этим же клеем.
- Теперь самое главное – балансировка. Пока клей сохнет, вам нужно идеально разместить грузы по краю крышки. Включаем дрель (вертикально), если вращающийся ротор бьет в какую-то сторону, то какой-то груз расположен не правильно. Поправляем, пробуем снова. Смазываем гайки сверху и накрываем второй крышкой. На края ротора приклеиваем изоленту. Сушим. Сам ротор готов!
- Берем два болта подлиннее, крепим в тиски и пробиваем в них углубления, в которых будет закреплён ротор. Теперь нужно придумать внешнюю рамку. Из ламината вырезаем круг. Лучше заранее прорисовать его циркулем. Сразу прорисуйте вертикальную и горизонтальную линии под углом 90 градусов. Внутри вырезаем круг поменьше, но такой, чтобы туда помещался ротор. По горизонтальным линиям делаем дырочки для болтов друг против друга. Вкручиваем болты. Между ними помещаем ось нашего гироскопа. При этом нельзя затягивать слишком плотно, иначе трение будет гасить скорость вращения, и ничего не получится. Оставьте около 1 мм хода, но так, чтобы гироскоп не вываливался из болтов. Приклеиваем болты к планке, чтобы вибрация не выкрутила их из рамки.
- Осталось только установить защиту. Берем толстую проволоку, сгибаем в кольцо. По месту отмеченной горизонтали прикрепляем к нашему изделию. Гироскоп готов. Наматываем ниточку на ось и, резко дергая за нее, проверяем работоспособность.
Эта самоделка будет интересна, в первую очередь, маленьким детям. Особенно, если собирать ее вместе. А вообще изготовление роторного гироскопа из подручных средств – это отличный способ весело и с пользой провести свободное время. Несмотря на визуальную сложность всей конструкции, сделать ее очень просто, ведь, по сути, гироскоп – это обычный волчок, только с «секретом».
Впрочем, сам принцип работы гироскопа также довольно прост: маховик вращается по часовой стрелке вокруг своей оси, которая, в свою очередь, сопряжена с кольцом и совершает вращательные движения в горизонтальной плоскости. Это кольцо жестко закреплено в другом кольце, поворачивающемся вокруг третьей оси. Вот и весь секрет.
Процесс изготовления роторного механического гироскопа
От пластиковой трубы отрезаем два кольца одинаковой ширины. Также потребуется подшипник, который нужно пролить суперклеем, чтобы он не крутился. Во внутреннее кольцо запрессовываем деревянную «таблетку», в которой по центру нужно просверлить отверстие под металлический стержень с заостренными концами.
На один край стержня надеваем кусок пластиковой трубки (можно позаимствовать с шариковой ручки). В пластиковом кольце сверлим два отверстия под стержень и стыкуем с вращающейся осью подшипника при помощи металлических трубок большего диаметра (можно использовать отрезки телескопической антенны).
Фотоника – научно-технический журнал – Фотоника
Принцип работы полупроводникового лазерного гироскопа (ПЛГ) основан на представлении о процессе захвата частот в кольцевом лазере как о развивающемся и устанавливающемся в пределах конечного времени, в течение которого возникает фазовая невзаимность циркулирующих волн. Известно, что захват (синхронизация) частот в лазерном гироскопе вызван обратным рассеянием циркулирующего излучения. Для преодоления захвата частот используют методы частотной подставки и He-Ne-гироскоп [1], который и по сей день остается единственным типом ЛГ, имеющим практическое применение. Все усилия по созданию твердотельного (полупроводникового) ЛГ, который без использования методов частотной подставки мог бы обеспечить присущие твердотельным лазерам более высокие надежность и долговечность, а следовательно мог быть более простым и дешевым в изготовлении, не привели к желаемому результату.Сигнал – частота биения выводимых волн – измерялся лишь при весьма больших угловых скоростях вращения. Минимальная измеряемая угловая скорость вращения составляла 50о/с при использовании в качестве среды усиления структуры InGaAsP/InP [2] и 15о/с при использовании структуры 1/2 VCSEL (half-vertical-cavity semiconductor-emitting laser)
[3]. Причиной низкой чувствительности ПЛГ являлся захват частот циркулирующих волн, связанный с большим уровнем обратного рассеяния в полупроводниковом оптическом усилителе (ПОУ). Таким образом, захват частот циркулирующих волн был и пока остается главной проблемой при создании твердотельного (полупроводникового) ЛГ, для решения которой требуется искать новые пути.
В настоящей работе рассматривается подход к созданию ПЛГ без частотной подставки, основанный на новой модели захвата частот в кольцевом лазере. В отличие от известной модели, построенной на аналогии между явлением захвата частот и взаимодействием двух связанных колебательных контуров [4], данная модель связана непосредственно с обратным рассеянием циркулирующих волн.
Модель процесса захвата частот в ЛГ
Представим ЛГ, включающий среду усиления и кольцевой резонатор в виде световода длиной L, смотанного в катушку радиуса R. В кольцевом резонаторе ЛГ циркулируют встречные волны, совершающие за время tL = Ln/c, где с – скорость света в вакууме и n – показатель преломления световода, очередную циркуляцию, т.е. пробег по полной длине кольцевого резонатора.
При вращении ЛГ с угловой скоростью Ω в результате эффекта Саньяка фазы обеих волн после каждой новой циркуляции изменяются – для одной волны фаза возрастает, а для другой волны убывает на одну и ту же величину:
δ=2πRNlΩ/cλ , (1)
где λ – длина волны излучения, N = L /l и l = 2πR. Тогда частота биения волн на выходе ЛГ должна быть пропорциональна угловой скорости вращения Ω:
ν = 2δ/2π tL = MΩ, (2)
где M = 2R/λn – масштабный коэффициент для кольцевого резонатора. Выражение (2) справедливо в случае отсутствия обратного рассеяния, учет которого кардинально изменяет ситуацию. Комплексные амплитуды циркулирующих волн примем Ak = akexp(φk), Bk = bkexp(ψk), где ak, bk – модули, φk, ψk – фазы комплексных амплитуд и k – номер циркуляции, отсчитываемый относительно начала, выбираемого произвольным образом или из физических соображений.
Будем полагать, что обратное рассеяние возникает внутри ПОУ, и каждая из двух волн Ak и Bk порождает «обратные волны», комплексные амплитуды которых A’k и B’k зависят от коэффициента обратного рассеяния по амплитуде α:
A’ = αBk и B’ = αAk . (3)
При этом коэффициент α полагаем действительным, а поляризации «обратных волн» линейными и совпадающими с поляризацией порождающих волн Ak и Bk. Примем во внимание, что сумма интенсивностей двух волн Ak и Bk остается неизменной в силу динамического равновесия между инверсной населенностью и оптическим полем в активной среде. Пренебрежем флуктуациями фаз обеих волн, вызываемыми спонтанным испусканием при многократном пробеге волн через ПОУ, и будем также считать, что внешние наводки – температурные нестабильности, вибрации и прочие – не оказывают воздействия на фазы циркулирующих волн. В результате процесс циркуляции волн в ЛГ можно описать с помощью системы рекуррентных уравнений:
Ak = еiδ Ak–1 + α . e –iδ Bk–1, (4)
Ak = α . еiδ Ak–1 + e –iδ Bk–1,
где k ≥ 1, заданы начальные комплексные амплитуды Aо, Bо и выполняется условие для интенсивностей циркулирующих волн |Ak|2 + |Bk|2 = 1 .
Как следует из численного расчета, при достаточно малых значениях саньяковской фазы δ в ходе циркуляций фазы φk и ψk сначала весьма быстро изменяются – одна фаза возрастает, а другая убывает, или наоборот, в зависимости от направления вращения. Но затем изменение фаз φk и ψk замедляется, а по достижении некоего числа циркуляций Kо прекращается вовсе. В приведенной картине динамики фазы φk (рис.1) показаны три случая: полное отсутствие обратного рассеяния, а также случаи, когда коэффициент рассеяния по интенсивности αI равен 30 и 40 дБ. Начальные условия для амплитуд и фаз выбраны следующие: aо=bо=1 и ψо=φо=0. Видно, что в отсутствие обратного рассеяния, т.е. при αI =0 дБ, фаза возрастет по линейному закону, в то время как в двух других случаях она изменяется лишь в пределах ограниченного числа циркуляций Ко. Для обоих выбранных значений коэффициента αI число циркуляций составляет примерно 50 и 100, соответственно; во всех трех случаях фаза ψk отличается от фазы φk только знаком.
Подобный характер, разумеется, имеет динамика разности фаз Δφk=φk–ψk – быстрый рост, замедление и, наконец, устанавливающийся после K0 циркуляций уровень ∆φo. Этот уровень определяется коэффициентом обратного рассеяния αI, параметрами кольцевого лазера, направлением и скоростью вращения. Можно также проверить, что устанавливающаяся разность фаз ∆φо не зависит от начальных значений фаз φо и ψо.
Показанная динамика фаз циркулирующих волн (при сравнительно небольшой угловой скорости вращения Ω и, соответственно, небольшой саньяковской фазе δ) есть ни что иное, как процесс формирования захвата частот волн в ЛГ. При этом следует понимать, что явление захвата частот – это весьма быстро развивающийся и устанавливающийся процесс. В ходе него происходит синхронизация частот двух волн, циркулирующих в противоположных направлениях, или, другими словами, имеет место частотная взаимность для встречных волн. Однако фазовой взаимности при этом не возникает – каждый раз при изменении скорости вращения, сколь ни была бы она малой, разность фаз циркулирующих в кольцевом резонаторе волн принимает новое значение. Оно зависит как от уровня обратного рассеяния, так и от направления и величины угловой скорости вращения.
Частотная характеристика ЛГ
При возрастании угловой скорости вращения, как известно, режим захвата частот в ЛГ исчезает и возникают биения частот выводимых волн. Расчет динамики фаз с помощью системы уравнений (4) также показывает, что если угловая скорость вращения увеличивается и, соответственно, увеличивается саньяковская фаза δ, то появляется монотонное и непрекращающееся изменение фаз циркулирующих волн, что означает возникновение биения частот.
Представим частотную характеристику ЛГ в виде функции ν(Ω, M, αI) или, в более удобном виде, как ν(ν*, αI), где ν*=MΩ – параметр, объединяющий масштабный коэффициент M и угловую скорость вращения Ω. Он имеет смысл частоты биения волн в отсутствие обратного рассеяния.
В соответствии с (2) запишем
саньяковские фазы для волн противоположных направлений как δ1,2=π tL–ν*. Тогда расчет частоты биений ν(ν*,αI) сводится к варьированию частоты при вычислении разности фаз, накапливаемой в процессе достаточно большого числа циркуляций P:
ν*(ν,αI) = ∆φ(p) /2πT, (5)
где ∆φ(p)=Σφk. Результат расчета частотной характеристики ЛГ с радиусом кольцевого резонатора R = 5 см и уровнем обратного рассеяния в диапазоне 50–35 дБ (рис.2) характерен для ПОУ, выполненном на структуре InGaAsP/InP. По оси ординат отложена частота биений ν(ν*, αI) на выходе ЛГ, а по оси абцисс – параметр ν*=MΩ. Можно видеть, что граница области захвата находится в диапазоне 0,3–1,8 МГц. Для сравнения, аналогичный параметр для He-Ne-гироскопа составляет 0,5–1,7 КГц [4].
Устройство и работа ПЛГ
Основная идея работы описываемого ПЛГ состоит в том, что в качестве сигнала, несущего информацию о вращении, используется не частота биения, а разность фаз циркулирующих волн, сначала быстро возрастающая, а затем замедляющаяся и устанавливающаяся на некотором уровне ∆φ0.
На рис.3 приведена блок-схема устройства [5] с поочередным пробегом двух волн через ПОУ. Так как число циркуляций, в процессе которых образуется и устанавливается разность фаз волн, ограничено, то длину кольцевого резонатора L выбираем достаточно большой. Для обеспечения когерентности циркулирующих волн используем инжекцию внешнего одночастотного излучения. Кольцевой лазер образован с помощью ПОУ на структуре InGaAsP/InP [6]. Резонатор кольцевого лазера выполнен из изотропного одномодового световода длиной L ≈ 350 м, смотанного в катушку радиусом 5 см. Задающий лазер – одночастотный ЛД с длиной волны излучения, совпадающей с центром эмиссии ПОУ. Кольцевой лазер и задающий одночастотный лазер составляют пару – ведомый и ведущий лазеры. ПЛГ содержит также волоконные разветвители, контроллеры поляризации, фотоприемник, цифровой осциллограф, систему накачки и ПК. Все устройство, кроме ПК, размещено на вращающемся столе.
Излучение задающего ЛД в виде импульса длительностью
τin ≤ ∆tL/2, где ∆tL – время пробега света по длине кольцевого резонатора L, делится на две волны и инжектируется в резонатор кольцевого лазера, по которому волны начинают пробег в противоположных направлениях. Одновременно на ПОУ подается ток накачки также в виде импульса длительностью TSOA >> τin, в течение которого волны совершают конечное число циркуляций по протяженному кольцевому резонатору. Части световода 5′ и 5″, связывающие зону инжекции волн с ПОУ, имеют различные длины, поэтому волны пробегают через ПОУ поочередно, но на фотоприемнике они всегда оказываются в одно время. По окончании импульса накачки и небольшой паузы производится новая инжекция излучения ЛД и все повторяется. В процессе циркуляции часть мощности обеих волн выводится из кольцевого лазера, волны объединяются и поступают на фотоприемник.
Характеристики излучения ПЛГ
Поочередный пробег двух волн через ПОУ обеспечивает в начале циркуляций большую интенсивность каждой из волн и уменьшает влияние волн друг на друга. Отметим, что даже в этом случае, когда волны начинают циркулировать, поочередно пробегая через ПОУ, обратное рассеяние через весьма короткое время приводит к возникновению «обратных» волн, пробегающих через ПОУ одновременно с порождающими их волнами. Это можно наблюдать при регистрации временной структуры излучения, а также следует из расчета с помощью системы уравнений (4). Таким образом, при инжекции внешнего одночастотного излучения происходит навязывание волнам, циркулирующим в кольцевом лазере, частоты инжектируемого излучения. Но циркуляция одночастотного излучения сохраняется в течение ограниченного времени. На рис.4 показаны три осциллограммы фототока: одна получена в случае покоящегося ПЛГ (эпюра черного цвета), две другие – при вращении с угловой скоростью Ω=4о/с
по направлению хода часовой стрелки (красный цвет) и в противоположном направлении (синий цвет). Осциллограммы иллюстрируют характер выходного
излучения и демонстрируют чувствительность описываемого устройства к угловому
вращению.
По осциллограммам видно, что в выходном излучении кольцевого лазера присутствуют импульсы «положительной и отрицательной полярности». Подобный же характер в виде импульсов «положительной и отрицательной полярности» имеют по отдельности каждая из циркулирующих волн независимо от наличия вращения и его отсутствия, что наблюдалось при подключении свободных полюсов разветвителей 8 и 9 к фотоприемнику (см. рис.3). Длительность импульсов обеих «полярностей» равна длительности инжектируемого излучения τin ≈ 250 нс, а период повторения равен времени пробега волн по кольцевому резонатору ∆tL
Сравнивая три осциллограммы, можно увидеть, что амплитуда импульсов «положительной полярности» при вращении зависит как от направления вращения – амплитуда импульсов возрастает или уменьшается, так и от величины скорости углового вращения – изменение амплитуд тем больше, чем выше скорость вращения. Эти изменяющиеся при вращении импульсы «положительной полярности» являются результатом интерференции волн, выводимых из кольцевого лазера, и несут информацию о вращении.
Исследования экспериментального Лазерного Гироскопа
С помощью системы обработки сигнала, включающей АЦП, систему синхронизации и ПК, по выходному сигналу определяли направление и величину угловой скорости. Согласно алгоритму обработки сигнала результат измерения на экран монитора выводят в виде эпюры, представляющей зависимость измеряемых параметров вращения от времени. Картина (рис.5), зафиксировала экран монитора в эксперименте, когда периодически в течение интервалов времени 10–15 с задавалось вращение по часовой стрелке и против нее с угловой скоростью Ω=4о/с.
По предварительной оценке чувствительность к угловому вращению описываемого ПЛГ составила 0,01о/с, т.е. превышала на три порядка чувствительность, полученную в работах [2, 3]. Очевидно, что развитие изложенного подхода требует дальнейших исследований.
Авторы благодарны В.Дураеву за предоставленные образцы ПОУ и полезные обсуждения.
литература
1. Ароновиц Ф. В кн. Применение лазеров/Пер.с англ. под ред. М.Росса. – М. : Мир.1971.
2. Inagaki K., Tamura S., Noto H. et al. – Physical Review. A, 2008, v. 78.
3. Mignot A., Feugnet G., Schwartz S. et al. – Optics Letters, 2009, v. 34.
4. Азарова В., Голяев Ю., Дмитриев В. – Квантовая электроника, 2000, т.30.
5. Сахаров В., Дураев В. – Твердотельный лазерный гироскоп. Патент РФ № 90895.
6. Дураев В., Казаков А., Медведев С. – Фотоника, 2010, №1.
Гироскоп – 3D анимация
Гироскоп (от древнегреческого γῦρος gûros , «круг» и σκοπέω skopéō , «смотреть») представляет собой вращающееся колесо или диск, в котором ось вращения может принимать любую ориентацию сама по себе. При вращении ориентация этой оси не зависит от наклона или поворота крепления в соответствии с сохранением углового момента. Из-за этого гироскопы полезны для измерения или сохранения ориентации. [1] [2]
Гироскопы, основанные на других принципах работы, также существуют, например, электронные гироскопы МЭМС с микрочипом, используемые в устройствах бытовой электроники, твердотельные кольцевые лазеры, волоконно-оптические гироскопы и т.д. чувствительный квантовый гироскоп. [необходима ссылка ]
Применения гироскопов включают инерциальные навигационные системы, в которых магнитные компасы не работают, как в телескопе Хаббла, или внутри стального корпуса подводной подводной лодки, или там, где магнитный компас не будет достаточно точным .Из-за своей точности гироскопы также используются в гиротеодолитах для поддержания направления при разработке туннелей. [3] Гироскопы могут использоваться для создания гирокомпасов, которые дополняют или заменяют магнитные компасы (на кораблях, самолетах и космических кораблях, транспортных средствах в целом), для обеспечения устойчивости (велосипеды, мотоциклы и корабли) или как часть инерциальная система наведения.
Описание и схема
Гироскоп – это колесо, установленное на двух или трех карданных шарнирах, которые представляют собой поворотные опоры, которые позволяют вращать колесо вокруг одной оси.Набор из трех карданов, один установленный на другом с ортогональными осями поворота, может использоваться, чтобы позволить колесу, установленному на самом внутреннем кардане, иметь ориентацию, остающуюся независимой от ориентации в пространстве его опоры. В случае гироскопа с двумя стабилизаторами внешний стабилизатор , который представляет собой раму гироскопа, устанавливается так, чтобы поворачиваться вокруг оси в своей собственной плоскости, определяемой опорой. Этот внешний стабилизатор обладает одной степенью свободы вращения, а его ось – нет.Внутренний стабилизатор установлен в раме гироскопа (внешний стабилизатор) так, чтобы поворачиваться вокруг оси в своей собственной плоскости, которая всегда перпендикулярна оси вращения рамы гироскопа (внешний стабилизатор). Этот внутренний стабилизатор имеет две степени свободы вращения.
Ось прялки определяет ось вращения. Ротор вынужден вращаться вокруг оси, которая всегда перпендикулярна оси внутреннего стабилизатора. Таким образом, ротор обладает тремя степенями свободы вращения, а его ось – двумя.Колесо реагирует на силу, приложенную к входной оси, силой реакции на выходную ось.
Поведение гироскопа легче всего оценить, рассматривая переднее колесо велосипеда. Если колесо отклонено от вертикали так, что верхняя часть колеса перемещается влево, передний обод колеса также поворачивается влево. Другими словами, вращение одной оси вращающегося колеса вызывает вращение третьей оси.
Маховик гироскопа будет катиться или сопротивляться вокруг выходной оси в зависимости от того, имеют ли выходные карданы свободную или фиксированную конфигурацию.Примерами некоторых устройств с подвесом со свободным выходом могут быть гироскопы для определения положения, используемые для определения или измерения углов продольного наклона, крена и рыскания в космическом корабле или самолете.
Центр тяжести ротора может находиться в фиксированном положении. Ротор одновременно вращается вокруг одной оси и может колебаться вокруг двух других осей, и он может свободно вращаться в любом направлении относительно фиксированной точки (за исключением присущего ему сопротивления, вызванного вращением ротора). Некоторые гироскопы имеют механические эквиваленты, заменяющие один или несколько элементов.Например, вращающийся ротор может быть подвешен в жидкости вместо того, чтобы быть установленным в карданном подвесе. Гироскоп с управляющим моментом (CMG) является примером карданного устройства с фиксированным выходом, которое используется на космическом корабле для удержания или поддержания желаемого углового положения или направления наведения с помощью гироскопической силы сопротивления.
В некоторых особых случаях внешний стабилизатор (или его эквивалент) можно не устанавливать, чтобы ротор имел только две степени свободы. В других случаях центр тяжести ротора может быть смещен относительно оси колебаний, и, таким образом, центр тяжести ротора и центр подвески ротора могут не совпадать.
История
По сути, гироскоп – это волчок, совмещенный с парой подвесов. Топы были изобретены во многих различных цивилизациях, включая классическую Грецию, Рим и Китай. [4] Большинство из них не использовались в качестве инструментов.
Первый известный прибор, похожий на гироскоп («Вращающееся зеркало» или «Зеркало Серсона») был изобретен Джоном Серсоном в 1743 году. Он использовался в качестве уровня для определения местоположения горизонта в условиях тумана или тумана.
Первый инструмент, больше похожий на настоящий гироскоп, был изготовлен Иоганном Боненбергером из Германии, который впервые написал о нем в 1817 году.Сначала он назвал это «Машиной». [5] [6] Машина Боненбергера была основана на вращающейся массивной сфере. [7] В 1832 году американец Уолтер Р. Джонсон разработал аналогичное устройство, основанное на вращающемся диске. [8] [9] Французский математик Пьер-Симон Лаплас, работавший в Политехнической школе в Париже, рекомендовал машину для использования в качестве учебного пособия, и таким образом она привлекла внимание Леона Фуко. [10] В 1852 году Фуко использовал его в эксперименте по вращению Земли. [11] [12] Именно Фуко дал устройству его современное название в эксперименте по наблюдению (греч. skopeein , видеть) вращения Земли (греч. gyros , круг или вращение), [13] , который был виден за 8-10 минут до того, как трение замедлило вращающийся ротор.
В 1860-х годах появление электродвигателей позволило гироскопу вращаться бесконечно; Это привело к созданию первого прототипа указателей курса и более сложного устройства – гирокомпаса.Первый функциональный гирокомпас был запатентован в 1904 году немецким изобретателем Германом Аншютцем-Кемпфе. [14] Позже в том же году американец Элмер Сперри разработал свой собственный дизайн, и другие страны вскоре осознали военную важность этого изобретения – в эпоху, когда военно-морская доблесть была самой важной мерой военной мощи – и создали свой собственный гироскоп. отрасли. Компания Sperry Gyroscope быстро расширилась и стала поставлять стабилизаторы для самолетов и военно-морских сил, и другие разработчики гироскопов последовали их примеру. [15]
В 1917 году компания Chandler из Индианаполиса создала «гироскоп Чендлера», игрушечный гироскоп с тягой и пьедесталом. Чендлер продолжал производить игрушку, пока компания не была куплена TEDCO inc. в 1982 году. Игрушка-чендлер до сих пор производится TEDCO. [16]
В первые несколько десятилетий 20-го века другие изобретатели пытались (безуспешно) использовать гироскопы в качестве основы для ранних навигационных систем «черный ящик», создав стабильную платформу, с которой можно было проводить точные измерения ускорения (в чтобы избежать необходимости наблюдения за звездами для расчета местоположения).Позже аналогичные принципы были использованы при разработке систем инерциальной навигации для баллистических ракет. [17]
Во время Второй мировой войны гироскоп стал основным компонентом авиационных и зенитных прицелов. [18] После войны гонка за миниатюризацию гироскопов для управляемых ракет и систем навигации оружия привела к разработке и производству так называемых сверхмалых гироскопов , которые весили менее 3 унций (85 г) и имели диаметр примерно 1 дюйм (2.{-7}} дюйма потребуется.
Трехосные гироскопы на основе MEMS также используются в портативных электронных устройствах, таких как планшеты, смартфоны [21] , [22] и умные часы. [23] Это добавляет к возможности определения ускорения по 3 осям, доступной на устройствах предыдущих поколений. Вместе эти датчики обеспечивают 6-компонентное обнаружение движения; ускорение для движения по осям X, Y и Z, а также гироскопы для измерения степени и скорости вращения в пространстве (крен, тангаж и рыскание).Некоторые устройства (например, iPhone [24] ) дополнительно включают магнитометр для обеспечения абсолютных угловых измерений относительно магнитного поля Земли. Новые инерциальные измерительные блоки на основе MEMS объединяют до всех девяти осей измерения в едином корпусе интегральной схемы, обеспечивая недорогие и широко доступные датчики движения. [25]
Современное использование
Steadicam
Во время съемок фильма «Возвращение джедая» использовалась установка Steadicam в сочетании с двумя гироскопами для дополнительной стабилизации, чтобы снимать фоновые пластины для погони на спидер-байке.Изобретатель Steadicam Гаррет Браун сделал снимок, прогуливаясь по лесу из красного дерева, управляя камерой со скоростью один кадр в секунду. При проецировании со скоростью 24 кадра в секунду создавалось впечатление, что он летит по воздуху с опасной скоростью. [26] [27]
Указатель курса
Указатель направления или гироскоп имеет ось вращения, установленную горизонтально и направленную на север. В отличие от магнитного компаса, он не ищет север. Например, при использовании в авиалайнере он будет медленно уноситься с севера, и его нужно будет периодически переориентировать, используя магнитный компас в качестве ориентира.
Гирокомпас
В отличие от гироскопа или указателя курса, гирокомпас направлен на север. Он обнаруживает вращение Земли вокруг своей оси и ищет истинного севера, а не магнитного севера. Гирокомпасы обычно имеют встроенное демпфирование для предотвращения перерегулирования при повторной калибровке из-за резкого движения.
Акселерометр
Путем определения ускорения объекта и интегрирования во времени можно вычислить скорость объекта.Снова интегрируя, можно определить положение. Самый простой акселерометр – это груз, который может свободно перемещаться в горизонтальном направлении, который прикреплен к пружине и устройству для измерения натяжения пружины. Это можно улучшить, введя противодействующую силу для отталкивания груза назад и измерив силу, необходимую для предотвращения перемещения груза. Более сложная конструкция представляет собой гироскоп с грузом на одной из осей. Устройство будет реагировать на силу, создаваемую весом, когда оно ускоряется, интегрируя эту силу для создания скорости.
Варианты
Гиростат
Гиростат состоит из массивного маховика, скрытого в прочном кожухе. [30] [31] Его поведение на столе или с различными режимами подвески или опоры служит для иллюстрации любопытного обращения обычных законов статического равновесия из-за гиростатического поведения внутреннего невидимого маховика при вращении. быстро. Первый гиростат был разработан лордом Кельвином, чтобы проиллюстрировать более сложное состояние движения вращающегося тела, когда оно свободно перемещается по горизонтальной плоскости, как волчок, вращающийся на тротуаре, или велосипед на дороге.Кельвин также использовал гиростаты для разработки механических теорий упругости материи и эфира; [32] Сегодня эти теории представляют чисто исторический интерес.
В наше время концепция гиростата используется при разработке систем ориентации для орбитальных космических аппаратов и спутников. [33] Например, космическая станция «Мир» имела три пары установленных внутри маховиков, известных как гиродины или гироскопы управления моментом . [34]
В физике существует несколько систем, динамические уравнения которых напоминают уравнения движения гиростата. [35] Примеры включают твердое тело с полостью, заполненной невязкой несжимаемой однородной жидкостью, [36] конфигурацию статического равновесия напряженного упругого стержня в теории упругости, [37] поляризационную динамику световой импульс, распространяющийся через нелинейную среду, [38] система Лоренца в теории хаоса, [39] и движение иона в масс-спектрометре с ловушкой Пеннинга. [40]
МЭМС
Гироскоп для микроэлектромеханических систем (MEMS) основан на идее маятника Фуко и использует вибрирующий элемент. Первоначально гироскоп на основе MEMS был разработан Systron Donner Inertial (SDI). Сегодня SDI – крупный производитель гироскопов MEMS.
HRG
Гироскоп с полусферическим резонатором (HRG), также называемый винным гироскопом [ противоречиво ] или грибовидным гироскопом, изготавливается с использованием тонкой твердотельной полусферической оболочки, закрепленной толстым стержнем.Эта оболочка приводится в изгибный резонанс электростатическими силами, создаваемыми электродами, которые наносятся непосредственно на отдельные структуры из плавленого кварца, которые окружают оболочку. Гироскопический эффект достигается за счет инерционности изгибных стоячих волн. [ требуется ссылка ]
VSG или CVG
Гироскоп с вибрирующей структурой (VSG), также называемый кориолисовым вибрационным гироскопом (CVG), [41] использует резонатор, сделанный из различных металлических сплавов.Он занимает позицию между недорогим гироскопом MEMS с низкой точностью и более высокоточным и дорогим FOG. Параметры точности увеличиваются за счет использования материалов с низким внутренним демпфированием, вакуумирования резонатора и цифровой электроники для уменьшения зависящего от температуры дрейфа и нестабильности управляющих сигналов. [42]
Высококачественные стеклянные резонаторы используются для точных датчиков, таких как HRG [43] или CRG. [44] [ противоречивый ]
DTG
Динамически настраиваемый гироскоп (DTG) представляет собой ротор, подвешенный на универсальном шарнире с шарнирами изгиба. [45] Жесткость пружины изгиба не зависит от скорости вращения. Однако динамическая инерция (из-за эффекта гироскопической реакции) подвеса обеспечивает отрицательную жесткость пружины, пропорциональную квадрату скорости вращения (Howe and Savet, 1964; Lawrence, 1998). Следовательно, при определенной скорости, называемой скоростью настройки, два момента компенсируют друг друга, освобождая ротор от крутящего момента, что является необходимым условием для идеального гироскопа.
Кольцевой лазерный гироскоп
Кольцевой лазерный гироскоп основан на эффекте Саньяка для измерения вращения путем измерения сдвига интерференционной картины луча, разделенного на две половины, когда две половинки движутся по кольцу в противоположных направлениях.
Когда Boeing 757-200 вступил в строй в 1983 году, он был оснащен первым подходящим кольцевым лазерным гироскопом. На разработку этого гироскопа ушло много лет, и экспериментальные модели претерпели множество изменений, прежде чем инженеры и менеджеры компаний Honeywell и Boeing сочли его готовым к производству. Это результат соревнований с механическими гироскопами, которые постоянно совершенствовались. Причина, по которой Honeywell из всех компаний выбрала разработку лазерного гироскопа, заключалась в том, что они были единственной компанией, у которой не было успешной линейки механических гироскопов, поэтому они не могли конкурировать сами с собой.Первая проблема, которую они должны были решить, заключалась в том, что при вращении лазерных гироскопов ниже определенного минимума невозможно было вообще обнаружить из-за проблемы, называемой «синхронизацией», когда два луча действуют как связанные генераторы и притягивают частоты друг друга к схождению. и, следовательно, нулевой выход. Решением было быстро встряхнуть гироскоп, чтобы он никогда не блокировался. Парадоксально, но слишком регулярное колебательное движение приводило к накоплению коротких периодов блокировки, когда устройство находилось в состоянии покоя на концах своего встряхивающего движения.Это было исправлено применением к вибрации случайного белого шума. Материал блока также был изменен с кварца на новую стеклокерамику Cer-Vit производства Owens Corning из-за утечки гелия. [46]
Волоконно-оптический гироскоп
Волоконно-оптический гироскоп также использует интерференцию света для обнаружения механического вращения. Две половины разделенного луча движутся в противоположных направлениях в бухте оптоволоконного кабеля длиной до 5 км. Как и кольцевой лазерный гироскоп, в нем используется эффект Саньяка. [47]
Лондонский момент
Лондонский моментный гироскоп основан на квантовомеханическом явлении, когда вращающийся сверхпроводник генерирует магнитное поле, ось которого совпадает с осью вращения гироскопического ротора. Магнитометр определяет ориентацию генерируемого поля, которое интерполируется для определения оси вращения. Гироскопы этого типа могут быть чрезвычайно точными и стабильными. Например, те, которые использовались в эксперименте Gravity Probe B, измеряли изменения ориентации оси вращения гироскопа до значения лучше 0.5 миллисекунд (1,4 × 10 −7 градусов) в течение одного года. [48] Это эквивалентно угловому разделению шириной человеческого волоса при просмотре с расстояния 32 км (20 миль). [49]
Гироскоп GP-B состоит из почти идеальной сферической вращающейся массы из плавленого кварца, которая обеспечивает диэлектрическую опору для тонкого слоя ниобиевого сверхпроводящего материала. Чтобы исключить трение, характерное для обычных подшипников, роторный узел центрируется электрическим полем от шести электродов.После первоначального раскрутки струей гелия, которая доводит ротор до 4000 об / мин, полированный корпус гироскопа откачивается до сверхвысокого вакуума, чтобы еще больше уменьшить сопротивление ротору. При условии, что электроника подвески остается включенной, исключительная симметрия вращения, отсутствие трения и низкое сопротивление позволят угловому моменту ротора поддерживать его вращение в течение примерно 15000 лет. [50]
Чувствительный СКВИД постоянного тока, который может различать изменения величиной от одного кванта, или около 2 × 10 −15 Вт, используется для наблюдения за гироскопом.Прецессия или наклон в ориентации ротора вызывает смещение магнитного поля лондонского момента относительно корпуса. Движущееся поле проходит через петлю сверхпроводящего датчика, прикрепленную к корпусу, вызывая небольшой электрический ток. Ток создает напряжение на шунтирующем сопротивлении, которое микропроцессором преобразуется в сферические координаты. Система разработана для минимизации крутящего момента Лоренца на роторе. [51] [52]
Бытовая электроника
Помимо использования в компасах, самолетах, компьютерных указывающих устройствах и т. Д., гироскопы были внедрены в бытовую электронику. Поскольку гироскоп позволяет рассчитывать ориентацию и вращение, дизайнеры внедрили их в современные технологии. Интеграция гироскопа позволила более точно распознавать движение в трехмерном пространстве, чем предыдущий одиночный акселерометр в ряде смартфонов. Гироскопы в бытовой электронике часто сочетаются с акселерометрами (датчиками ускорения) для более надежного определения направления и движения.Примеры таких приложений включают смартфоны, такие как Samsung Galaxy Note 4, [53] HTC Titan, [54] Nexus 5, iPhone 5s, [55] Nokia 808 PureView [56] и Sony Xperia, периферийные устройства для игровой приставки, такие как контроллер PlayStation 3 и пульт Wii Remote, а также наборы виртуальной реальности, такие как Oculus Rift. [57] [ не цитируется ]
Nintendo интегрировала гироскоп в контроллер Wii Remote консоли Wii с помощью дополнительного оборудования под названием «Wii MotionPlus». [58] Он также включен в 3DS и Wii U GamePad, который обнаруживает движение при повороте.
Круизные лайнеры используют гироскопы для выравнивания чувствительных к движению устройств, таких как самовыравнивающиеся бильярдные столы.
Гироскоп с электрическим приводом и маховиком, вставленный в велосипедное колесо, продается в качестве альтернативы тренировочному колесу. [ требуется ссылка ]
См. Также
МЭМС-гироскопы | Silicon Sensing
Узнайте больше о нашей технологии гироскопов MEMS…
Гироскопы MEMS, или, строго говоря, датчики угловой скорости MEMS, используются всякий раз, когда требуется определение скорости поворота (° / с) без фиксированной точки отсчета. Это отделяет гироскопы от любых других средств измерения вращения, таких как тахометр или потенциометр.
Гироскопы MEMS компании Silicon Sensing используют ту же уникальную запатентованную технологию резонирующих колец VSG для измерения скорости вращения посредством явления, известного как кориолис. Основная конструкция и принципы работы кратко описаны ниже.
Silicon Sensing произвела первый MEMS VSG в конце 1990-х, с тех пор более 20 000 000 гироскопов MEMS были поставлены тысячам довольных клиентов. Насколько нам известно, почти все эти гироскопы по-прежнему удовлетворительно работают после 20 лет непрерывной эксплуатации, что свидетельствует о надежности VSG. Сейчас существует три поколения MEMS VSG; Индуктивные, емкостные и PZT, позволяющие Silicon Sensing производить широкий спектр гироскопов MEMS VSG от недорогих прецизионных датчиков масштаба микросхемы (например.g.PinPoint ® ) до высокопроизводительных модулей MEMS Gyro класса FOG (например, CRH02 и CRS39).
Краткая история гироскопов Gyro
Гироскопы и их полезное применение для стабилизации вещей впервые появились в начале 20-го века -го века, и генеалогическое древо Silicon Sensing восходит к этим новаторским годам. Изначально гироскопы были механическими устройствами, в которых использовалась вращающаяся масса, поддерживаемая таким образом, что его положение в инерционном пространстве оставалось фиксированным, что позволяло измерять вращение его опорной конструкции.Механические гироскопы, такие как DTG (динамически настраиваемые гироскопы), все еще используются сегодня там, где требуется высокая точность.
В 1970-х годах появились оптические гироскопы. RLG (кольцевой лазерный гироскоп) и FOG (волоконно-оптический гироскоп) используют фазовый сдвиг света, движущегося в противоположных направлениях вокруг фиксированной длины пути, для определения угловой скорости. RLG и FOG очень точны, но довольно сложны, поэтому относительно большие и дорогостоящие в производстве.
За последние двадцать лет мир инерциальных датчиков перевернулся с появлением «твердотельных» невращающихся датчиков скорости, ошибочно называемых гироскопами.Silicon Sensing была одной из первых компаний, которая в 1980-х годах начала коммерчески использовать потенциал твердотельных гироскопов, выпустив VSG – гироскоп с вибрирующей структурой.
Щелкните здесь, чтобы увидеть полную шкалу истории создания гироскопов Silicon Sensing за последние 100 лет.
Гироскопы MEMS VSG – краткое описание их основной конструкции и работы
Все гироскопы VSG MEMS компании Silicon Sensing используют вибрирующее или резонирующее кольцо, изготовленное с использованием процесса объемного кремния DRIE (Deep Reactive Ion Etch).Кольцевое кольцо поддерживается в свободном пространстве восемью парами симметричных спиц в форме «собачьих ножек». Процесс травления объемного кремния и уникальная запатентованная конструкция кольца обеспечивают геометрические свойства с жесткими допусками для точного баланса и термостабильности, и, в отличие от других гироскопов MEMS, отсутствуют небольшие зазоры, создающие проблемы интерференции и заедания. Эти особенности вносят значительный вклад в стабильность смещения и масштабного коэффициента VSG по сравнению с температурой, вибрацией и устойчивостью к ударам. Еще одним преимуществом конструкции является присущая ей невосприимчивость к ошибке скорости, вызванной ускорением, или «g-чувствительности».
Приводы / преобразователи прикреплены к верхней поверхности периметра силиконового кольца и электрически соединены с контактными площадками на кремнии через дорожки на спицах. Они приводят в действие или “ приводят ” кольцо в его режим вибрации Cos2θ при резонансе (например, трение мокрым пальцем по бокалу, заставляя его “ звенеть ”) или обнаруживают радиальное движение периметра кольца, вызванное исполнительным механизмом первичного привода или эффект силы Кориолиса, когда гироскоп вращается вокруг своей оси восприятия, которая проходит через центр кольца.Комбинация технологии преобразователя и вторичных преобразователей улучшает отношение сигнал / шум VSG, преимуществом которого является устройство с очень низким уровнем шума с отличной нестабильностью смещения и ARW (случайное угловое блуждание).
Ниже приведены два видеоролика, схематически показывающих резонанс кремниевого кольца MEMS. Первый показывает, что гироскоп работает, но не вращается (т.е. ввод нулевой угловой скорости). Вы можете видеть, что каждая точка на кольце движется радиально – по прямой линии от центра кольца – за исключением «узлов» на +/- 45 градусов, показанных синими точками, которые остаются неподвижными.
Во втором видео на гироскоп теперь вводится угловая скорость. Сила Кориолиса вступает в игру, заставляя каждую точку кольца, движущуюся наружу, «изгибаться» в одном направлении, в то время как точки, движущиеся внутрь, «изгибаются» в другую сторону. В конечном итоге это приводит к перемещению колебательной моды вокруг кольца на угол, пропорциональный скорости вращения.
Скорость вращения можно измерить двумя способами (i) путем определения величины, на которую теперь перемещаются ранее узловые точки – так называемое измерение разомкнутого контура, или (ii) путем установления восстанавливающей силы, которая сохраняет режим кольцевой вибрации в исходном месте. на кольце – так называемое замкнутое измерение.
Наконец, на следующем рисунке ниже показано типичное приложение. Предполагается, что гироскоп прикреплен к автомобилю таким образом, что он чувствителен к скорости поворота автомобиля.
При включенном питании, когда автомобиль движется по прямой, силиконовое кольцо резонирует в своей моде Cos2θ на оси 0 ° -90 °. Узлы в точках под углом 45 ° (зеленые и красные точки) практически неподвижны. Когда автомобиль поворачивает за угол, силы Кориолиса (пропорциональные скорости поворота) пытаются сдвинуть режим вибрации вокруг оси, что означает, что исходные узловые точки больше не являются неподвижными.В реальной реализации гироскопа управляющая электроника работает в конфигурации с замкнутым контуром, чтобы поддерживать положение резонанса относительно его исходной оси. «Сила», необходимая для этого, преобразуется в аналоговый (или цифровой) сигнал, который пропорционален скорости вращения.
Наши гироскопы
Принцип работы гироскопа LFM. (a) Механическая структура с 2 степенями свободы …
Контекст 1
… Гироскоп LFM полагается на то, что каждая ортогональная ось механической структуры с 2 степенями свободы, смоделированной, как на рис.1а, колеблются на собственной резонансной частоте. Электронная схема преодолевает механические потери и возбуждает каждый резонатор с постоянной управляемой амплитудой движения, равной для обеих осей. Собственные частоты двух осей, f nx и f ny, по конструкции отличаются на величину f ∆, так что контрольная масса прецессирует в …
Контекст 2
… декартова плоскость, где фиксированный вектор представляет вектор с частотой ω x, уравнение. 2 можно графически представить, как на рис.1b. Очевидно, что векторы, соответствующие инерционной силе, демпфирующей силе, упругой силе и силовому элементу, фиксированы, поскольку все они являются векторами, движущимися при ω x. С другой стороны, вектор, соответствующий силе Кориолиса, поскольку его вектор движется в точке ω y (которая намеренно отличается от ω x на определенный …
Context 3
… пример, На рис. 1c графически показано изменение во времени резонансной частоты одной оси в идеальном гироскопе LFM с собственной частотой 25 кГц, разделением мод 100 Гц, единичным угловым усилением и идеальным управлением амплитудой скорости в зависимости от функции. ступенчатой угловой скорости, изображенной пунктирной кривой.Обратите внимание, что благодаря модуляции AM резонанс …
Контекст 4
… устройства рыскания и 3 устройства шага, соответственно подключенные к 11 интегральным схемам, были протестированы для экспериментальной проверки части частичная повторяемость масштабного коэффициента. На рис. 10 показан пример измерения для одной системы определения рыскания и одной системы по тангажу. Полученные значения около 0,8 Гц / Гц согласуются с прогнозируемым угловым усилением, приведенным в разделе II. …
Контекст 5
… Масштабные коэффициенты S Σ / 2 для различных выборок рыскания показаны на рис. 11 треугольными маркерами. На рисунке показано уменьшение вариабельности масштабного коэффициента, полученное при рассмотрении суммы индивидуальных вариаций резонансной частоты, показанных квадратными и круглыми маркерами. Экстраполированное относительное стандартное отклонение общего масштабного коэффициента составляет 5500 ppm, по сравнению с 3% разбросом при учете …
Контекст 6
… (по частям) Bosch Sensortec 6D IMU ± 0.02% / K от −40 до 85 0,9 ± 2000 7 BMI160 [31] ± 3% (от детали к детали) без калибровки ни настройки, ни постобработки, и даже с 280% отклонением между самым низким (67 Гц) и наибольшие (187 Гц) значения рассогласования. Масштабные коэффициенты на одном образце, полученные при различных температурах, представлены на рис. 12. Используемый диапазон ограничен в нижней части используемыми приборами, а в верхней – типичными характеристиками датчиков потребительского уровня [28]. При подгонке данных с помощью линейной модели экстраполированный температурный коэффициент масштабного фактора (TCS) оказывается равным -35 ppm / K, что соответствует 0.4% общего разброса в пределах …
Контекст 7
… факторов трех различных выборок основного тона обозначены на рис. 13 треугольными маркерами. Экстраполированное относительное стандартное отклонение общего масштабного коэффициента S Σ составляет 5400 ppm, что сравнимо с полученным для рысканья …
Контекст 8
… как показано, не влияет на масштабный коэффициент, а отражает разрешение, которое составляет от 9 до 24 мдпс / √ Гц при рассмотрении всех испытанных образцов.На рис. 14 показана зависимость частотного шума того же образца с рысканием от амплитуды смещения контрольной массы, полученная при изменении эталона АРУ. На рисунке показано, как плотность шума обратно пропорциональна амплитуде смещения, как предсказывается формулой. 9. …
Гироскопические летные инструменты – принципы, жесткость в космосе, прецессия
Гироскопические летные инструменты
Некоторые летные инструменты используют свойства гироскопа для своей работы.Наиболее распространенными приборами, содержащими гироскопы, являются координатор поворота, указатель курса и указатель ориентации. Чтобы понять, как работают эти инструменты, необходимо знать системы питания инструмента, принципы гироскопии и принципы работы каждого инструмента.
Принципы гироскопии
Любой вращающийся объект проявляет гироскопические свойства. Колесо или ротор, спроектированный и установленный для использования этих свойств, называется гироскопом. Двумя важными конструктивными характеристиками приборного гироскопа являются большой вес для его размера или высокая плотность, а также вращение на высокой скорости с подшипниками с низким коэффициентом трения.
Есть два основных типа крепления; используемый тип зависит от того, какое свойство гироскопа используется. Свободно или универсально установленный гироскоп может свободно вращаться в любом направлении относительно своего центра тяжести. Говорят, что такое колесо имеет три плоскости свободы. Колесо или ротор могут свободно вращаться в любой плоскости по отношению к основанию и уравновешены таким образом, что в состоянии покоя гироскопическое колесо остается в том положении, в котором оно установлено. Гироскопы с ограниченным или полужестким креплением – это гироскопы, установленные таким образом, что одна из плоскостей свободы удерживается фиксированной по отношению к основанию.
Есть два основных свойства гироскопического действия: жесткость в пространстве и прецессия.
Жесткость в пространстве
Жесткость в пространстве относится к принципу, согласно которому гироскоп остается в фиксированном положении в плоскости, в которой он вращается. Примером жесткости в пространстве является велосипедное колесо. По мере того, как колеса велосипеда увеличивают скорость, они становятся все более устойчивыми в своей плоскости вращения. Вот почему велосипед очень неустойчивый и очень маневренный на низких скоростях и очень устойчивый и менее маневренный на высоких скоростях.
При установке этого колеса или гироскопа на набор карданных колец гироскоп может свободно вращаться в любом направлении. Таким образом, если кольца кардана наклоняются, скручиваются или перемещаются иным образом, гироскоп остается в той плоскости, в которой он вращался изначально. [Рисунок 7-18] Рисунок 7-18. Независимо от положения его основания, гироскоп имеет тенденцию оставаться неподвижным в пространстве, а его ось вращения направлена в постоянном направлении.
Прецессия
Прецессия – это наклон или поворот гироскопа в ответ на отклоняющую силу.Реакция на эту силу не происходит в точке, в которой она была приложена; скорее, это происходит в точке, которая на 90 ° позже по направлению вращения. Этот принцип позволяет гироскопу определять скорость поворота, определяя величину давления, создаваемого изменением направления. Скорость, с которой гироскоп прецессирует, обратно пропорциональна скорости ротора и пропорциональна отклоняющей силе.
На примере велосипеда прецессия действует на колеса, чтобы позволить велосипеду поворачиваться.При движении с нормальной скоростью нет необходимости поворачивать руль в направлении желаемого поворота. Всадник просто наклоняется в том направлении, в котором он хочет двигаться. Поскольку колеса вращаются по часовой стрелке, если смотреть с правой стороны велосипеда, если гонщик наклоняется влево, сила прикладывается к верхней части колеса слева. Фактически сила действует на 90 ° в направлении вращения, что приводит к приложению силы к передней части шины, заставляя велосипед двигаться влево.Есть необходимость поворачивать руль на малых скоростях из-за нестабильности медленно вращающихся гироскопов, а также для увеличения скорости поворота.
Прецессия также может вызывать незначительные ошибки в некоторых приборах. [Рис. 7-19] Прецессия может привести к смещению свободно вращающегося гироскопа из намеченной плоскости вращения из-за трения подшипника и т. Д. Некоторые приборы могут потребовать корректировки во время полета, например, указатель курса.
Рисунок 7-19. Прецессия гироскопа в результате приложенной отклоняющей силы.Flight Mechanic рекомендует
Плюсы, минусы и способы использования различных гироскопов
Гироскоп определяет изменение ориентации устройства и в сочетании с акселерометром является отличным инструментом для измерения ориентации объекта в трехмерном пространстве.
Четверг, 29 ноября 2018 г.
В предыдущем посте мы определили элемент технологии, который помогает формировать будущее – датчик IMU. Сегодня мы более подробно рассмотрим один датчик движения, в частности гироскоп.
Гироскоп определяет изменение ориентации устройства и в сочетании с акселерометром является отличным инструментом для измерения ориентации объекта в трехмерном пространстве. Гироскопы определяют угловую скорость (ω), обычно измеряемую в радианах в секунду. Интеграция угловой скорости обеспечивает информацию об ориентации (если предоставляется исходная ориентация или значение может быть принято) по трем осям: тангаж, крен и рыскание.
Гироскоп позволяет отслеживать изгибы, повороты и крены движущегося объекта.Доступ к более точной информации об ориентации имеет широкое практическое применение, например, помогая наземному роботу учитывать препятствия, которые он преодолевает, переводя движения человека из реального мира в виртуальный мир или помогая ориентировать самолет в полете.
Традиционный механический гироскоп – это простое колесо, которое устанавливается на 2-3 кардана (шарнирные опоры, обычно кольца, которые позволяют колесу вращаться вокруг одной оси). Гироскопы были впервые использованы в середине 19 века для ранних изображений орбиты Земли и с тех пор используются в инерциальных навигационных системах самолетов, кораблей, космических аппаратов и спутников.Однако, несмотря на повсеместное использование, традиционный механический гироскоп ограничен движущимися частями.
Давайте рассмотрим современные типы гироскопов и их применение:
Кольцевой лазерный гироскоп (RLG) Кольцевые лазерные гироскопыработают на эффекте Саньяка, который вкратце говорит о том, что разделенный луч света, идущий по одному и тому же пути в противоположных направлениях, будет претерпевать изменения фазы, когда все устройство испытывает угловую скорость. На показанной схеме лазер разделен на два по двум путям равной длины и принимается детектором.Когда RLG вращается по часовой стрелке, луч, движущийся по часовой стрелке, эффективно проходит немного более длинный путь и замедляет его прием детектором. Луч против часовой стрелки движется против вращения, эффективно сокращая путь, увеличивая свою скорость относительно другого лазера. Противоположный эффект возникает при вращении против часовой стрелки.
Измеряя изменения фазы во время вращения устройства, можно определить угловую скорость.
Использует:- Инерциальные навигационные системы военных самолетов, коммерческих авиалайнеров, кораблей и космических аппаратов
- Высокая производительность:
- Высокая точность, лучше 0.Погрешность смещения 01 ° / час
- Среднее время безотказной работы (среднее время наработки на отказ) более 60 тыс. Часов
- Никаких механических или движущихся частей, создающих трение, поэтому нет дрейфа
- При очень медленном вращении частоты противодействия могут стать настолько похожими, что их невозможно будет различить, в результате лучи будут «блокироваться» друг с другом, а не вращаться; это называется фиксатором
- Может использоваться только для одной оси, для получения информации по нескольким осям требуется несколько RLG
FOG также используют эффект Саньяка, но многократно усугубляют его, используя несколько катушек для перемещения света (в отличие от одного кольца, как в RLG).Кроме того, кольца не являются частью лазера. Вместо этого световые лучи распространяются с помощью внешнего лазера. Опять же, луч света, распространяющийся в том же направлении, что и вращение, будет иметь несколько большую задержку пути, чем луч, идущий против вращения. Это приводит к дифференциальному фазовому сдвигу, измеренному с помощью интерферометрии.
Дифференциальный фазовый сдвиг эффективно умножается на каждую дополнительную катушку, которую использует ВОГ. Это умножение позволяет FOG иметь повышенную чувствительность в целом по сравнению с RLG.Однако при однократном прохождении света через кольцо RLG будет более точным, поскольку его фазовый сдвиг пропорционален самому вращению, а не производной, как в FOG.
Использует:- Применения с высокой ударной нагрузкой, такие как системы наведения оружия (однако их часто необходимо использовать в паре с многоосевыми FOG и акселерометрами, чтобы преодолеть их чувствительность к вибрациям)
- Высокопроизводительные космические приложения
- Волоконно-оптические гирокомпасы для навигационных систем
- Инерциальные системы навигации управляемых ракет
- Дистанционно-управляемые аппараты и автономные подводные аппараты
- Геодезическое оборудование
- Чрезвычайно точная информация о частоте вращения
- Без движущихся частей
- Не полагается на инерционное сопротивление движению
- Обычно показывает более высокое разрешение, чем RLG
- Более длительное время производства из-за более высоких требований к калибровке
- Может использоваться только для одной оси, для получения информации по нескольким осям требуется несколько FOG
MEMS (микроэлектромеханические системы) используют комбинацию механических колебаний и силы Кориолиса.Сила Кориолиса – это сила инерции, действующая в направлении, перпендикулярном оси вращения. Внутри гироскопа MEMS представьте себе емкостной блок, который колеблется с фиксированной скоростью в противофазе с другим блоком. Когда устройство вращается, силы Кориолиса блоков немного перемещают их в противоположных направлениях (оба перпендикулярны оси вращения) из-за разницы фаз блоков. Эта разница в силе изменяет емкость пластины под ней, чтобы измерить общую угловую скорость объекта.На самом деле блоки больше похожи на сетки, но действует тот же основной принцип.
ГироскопыMEMS обычно трехосные, но могут быть одноосными или двухосными. Также доступны различные уровни качества в зависимости от требований приложения. Например, гироскопы потребительского класса, как правило, дешевле, чем гироскопы, предназначенные для промышленного или автомобильного использования, которые работают в более широких диапазонах температур и спроектированы и испытаны так, чтобы иметь более стабильные характеристики, чтобы соответствовать строгим требованиям безопасности.
Использует:- «Умные» технологии в домах, городах и автомобилях
- IMU (в сочетании с акселерометром и магнитометром)
- Промышленные и автомобильные приложения, такие как системы GPS (более дорогостоящие MEMS)
- Портативная бытовая электроника, такая как планшеты, смартфоны, умные часы, игровые контроллеры, гарнитуры AR / VR и роботы-уборщики (недорогие MEMS)
- Оптическая стабилизация изображения в камерах
- Игровые приложения для мобильных устройств и виртуальной реальности
- Форм-фактор значительно меньше, чем у других гироскопов
- Может быть интегрирован с цифровым интерфейсом в одном экономичном пакете
- Меньшая мощность
- Стоимость значительно ниже, чем у FOG или RLG, поэтому его можно использовать в массовых потребительских товарах
- Меньшая устойчивость к температуре, влажности и нагрузкам, некоторые из которых можно компенсировать с помощью программного обеспечения
- Больше ошибок интеграции относительно FOG или RLG
- Часто разная производительность в разных партиях и единицах
Современные гироскопы на основе RLG, FOG и MEMS устраняют ограничения традиционных гироскопов.Обладая разнообразными сильными сторонами, они могут поддерживать технологии следующего поколения во всех областях.
В частности, в потребительской сфере гироскопы на основе МЭМС становятся все более популярными и добавляют функциональность большому количеству потребительских устройств благодаря простоте интеграции, размеру и стоимости.
Автор:
Чарльз Пао
Чарльз Пао начал работать в Hillcrest Labs после окончания Университета Джона Хопкинса со степенью магистра наук в области электротехники.Он начал разработку программного обеспечения, создав систему черного ящика для оценки характеристик движения. Обладая страстью к средствам массовой информации и коммуникациям, Чарльз начал выпускать демонстрационные ролики и видеоролики о продуктах для Hillcrest Labs. Это увлечение привело к переходу на официальную должность в отдел маркетинга. В настоящее время он является первым контактным лицом компании Hillcrest для получения информации и поддержки, а также руководит их маркетинговыми усилиями. Он также занимал различные должности по управлению учетными записями и проектами. Чарльз также получил степень бакалавра наук в области электротехники и вычислительной техники в Университете Джона Хопкинса.Возможно, вам понравится
Больше от Sensor fusion
Датчики, датчики везде. Что мне теперь делать?
Отправлено: 25 июля 2021 г. Моше ШейерМобильные вычисления привели к взрывному развитию продуктов – смартфонов, носимых, наушников, спортивных фотоаппаратов и т. Д.Дальше будет зондирование…
Радар L2 + и HD: золотая возможность
Отправлено: 26 апреля 2021 г. Нир ШапираМы все еще ждем полной автономности в автомобилях, но теперь понимаем, что это намного дальше, чем мы думали изначально.…
Контекстная осведомленность: что это такое и как оно используется?
Отправлено: 17 марта 2021 г. Элия ШенбергерКонтекстно-зависимые устройства, такие как встроенные клавиатуры смартфонов, существуют уже некоторое время, хотя и в очень ограниченной форме.…
Измерение угловых изменений с помощью эффекта Саньяка
Гироскопы – это устройства, которые измеряют угловые изменения. При первом упоминании большинство людей представляет себе прекрасно вращающийся классический механический гироскоп. Несмотря на то, что оптические гироскопы широко использовались до конца 1900-х годов, они в значительной степени заменили собой новый отраслевой стандарт из-за отсутствия движущихся частей, что делает их гораздо более надежными и точными.
Обратите внимание, как внутренний вращающийся диск и ось сохраняют направление вращения, несмотря на случайное вращательное движение внешнего кольца.Предоставлено Best Animations.
Выше – анимация механического гироскопа. Обратите внимание, как внутренний вращающийся диск и ось сохраняют направление вращения, несмотря на случайное вращательное движение внешнего кольца. Таким образом, механический гироскоп можно использовать для обнаружения вращения, используя ось внутреннего гироскопа в качестве опорной точки. Однако все движущиеся части делают его сложным в обслуживании устройством.
Оптический гироскоп, показанный ниже, представляет собой компактное устройство, состоящее из лазера внутри кольцевого интерферометра.Как упоминалось ранее, основным преимуществом оптических гироскопов является отсутствие движущихся частей.
Оптические гироскопы не имеют движущихся частей (в отличие от механических гироскопов), что делает их чрезвычайно надежными. Любезно предоставлено Википедией.
Оптические гироскопы, которые в основном используются для стабилизации и управления движением, можно найти в самолетах, роботах, смартфонах и других подобных устройствах, которым необходимо постоянно определять свою текущую ориентацию в пространстве.
гироскопы человека – вестибулярные системы
Поначалу это могло показаться не таким важным.В конце концов, у нас есть хорошее чувство направления и мы можем чувствовать вращение. Почему для пилотов и самолетов жизненно важно иметь гироскопы, указывающие им их ориентацию?
Наш мозг в первую очередь использует комбинацию датчиков зрения и внутреннего давления (наших вестибулярных систем) для определения ориентации. Когда мы закрываем глаза, трудно стоять прямо, не раскачиваясь из стороны в сторону. Но это не невозможно. Наши глаза только помогают. Наш мозг может самостоятельно определять гравитацию с помощью вестибулярной системы.Состоящая в основном из сенсорных волосковых клеток во внутреннем ухе, которые активируются движением локальных жидкостей при движении всей нашей головы или тела, именно эта жизненно важная система дает сбой у людей, страдающих болезнью Меньера, вызывая головокружение и головокружение.
необходимость внешних гироскопов?
Когда пилот находится в самолете, и мозг, и глаза могут определить «ложную» ориентацию вниз. Когда самолет кренится при повороте, наши глаза не могут обнаружить поворот, так как вся кабина также наклонена.Точно так же центростремительная сила, вызывающая поворот, увеличивает давление на наши ноги. Эта комбинированная сила направлена не в направлении силы тяжести, как можно видеть на рисунке, а фактически параллельна ориентации кабины самолета. Итак, у мозга нет возможности узнать его реальную ориентацию. Все, кто выглядывал из самолета, когда он поворачивается, знают, что, хотя они могут видеть, что они наклонены, иногда более 60 градусов, они не чувствуют нестабильности.
Когда самолет кренится, сила, которую ощущают пассажиры, всегда направлена вниз по отношению к полу самолета, а не по направлению силы тяжести.Предоставлено Aviation Stack Exchange.
Самолеты-истребители подвергаются гораздо более грубым берегам во время крена и пикирования. Вестибулярный аппарат пилота не может помочь ему сохранить ориентацию относительно силы тяжести, поскольку жидкости его внутреннего уха будут двигаться во всех направлениях. Таким образом, наличие надежного внешнего гироскопа для постоянного отслеживания ориентации самолета имеет важное значение.
Обнаружение вращения
У каждого типа гироскопа есть свои преимущества и недостатки, и разные требования требуют разных форм гироскопов.
Оптические гироскопы используют постоянство скорости света в качестве основного принципа для обнаружения изменений вращения. Существует два разных варианта оптических гироскопов, конструкции и сравнения которых мы обсудим в следующей статье.
Преимущества перед механическими гироскопами
Оптические гироскопы в значительной степени вытеснили свои механические аналоги. Во-первых, оптические гироскопы намного точнее. Они могут измерять вращательные изменения с погрешностью 0.001 градус / час. Для сравнения, самый точный механический гироскоп обеспечивает точность всего 0,1 градуса в час.
Во-вторых, их внутренняя лазерная и сенсорная техника более надежны. Кроме того, они не имеют движущихся частей и поэтому не требуют обслуживания. Это приводит к тому, что среднее время отказов превышает 60 000 часов.Оптические гироскопы также напрямую генерируют программные данные, в отличие от механических гироскопов. Это очень важно в наше время. От автопилота в самолетах до управляемых ракет и автономных вездеходов на Марсе – современные системы используют датчики только в том случае, если они надежно генерируют удобные для компьютера данные.
Основной принцип работы оптических гироскопов
Как упоминалось выше, существует два типа оптических гироскопов: кольцевой лазерный гироскоп и волоконно-оптический гироскоп. Оба основаны на одном и том же принципе – эффекте Саньяка, который является результатом постоянства скорости света.
Эффект Саньяка – это смещение положения интерференционной полосы в кольцевом интерферометре в зависимости от угловой скорости установки.
В 1913 году Жорж Саньяк провел свой эксперимент, чтобы доказать существование призрачного эфира.Существование эфира было широко распространенной теоретической идеей из-за постоянной скорости света, независимо от скорости источника. Теперь мы знаем, что это неверно и что постоянство скорости света на самом деле связано с релятивистской природой нашей Вселенной, как обнаружил Эйнштейн.
Интерферометры
Как и большинство ученых, занимающихся релятивистскими масштабами в физике света, Саньяк использовал интерферометр – лазерное устройство, которое разделяет свой луч на 2 части с помощью полупрозрачного зеркала.
Базовая установка интерферометра, сравнивающая пути световых лучей на основе интерференционной картины. С любезного разрешения web.pa.msu.edu
Световые лучи движутся в разных направлениях, при этом один из них часто сталкивается с различными оптическими препятствиями. Световые лучи сливаются, и детектор улавливает получившийся луч. В зависимости от различий в их индивидуальных траекториях лучи не совпадают по фазе, создавая интерференционную картину. Детектор анализирует интерференционную картину, чтобы определить различные характеристики эксперимента и препятствия, с которыми сталкивается световой луч.Научные исследователи и промышленность широко используют интерферометры для измерения малых смещений, показателей преломления и неровностей поверхности. Если вас больше интересует работа интерферометра, обязательно ознакомьтесь с нашей предыдущей статьей здесь.Эффект Саньяка
Схема кольцевого интерферометра представлена ниже. Как только посеребренное зеркало разделяет световые лучи, они оба проходят равное расстояние в противоположных направлениях по петле. Когда лучи соединяются, возникает регулярная интерференция, поскольку световые лучи находятся в фазе.
Интерферометр в кольцевой установке. Световые лучи проходят от источника к детектору по часовой стрелке / против часовой стрелки на равном расстоянии. Любезно предоставлено Википедией.
Однако, как только петля вращается вокруг своей центральной оси (отмеченной X на диаграмме, выходящей из страницы), световые лучи больше не проходят равные пути, и разность фаз создает смещающуюся интерференционную картину.
Шары разного цвета представляют собой световые лучи, движущиеся в разных направлениях. Обратите внимание, как одни и те же шары встречаются в разных местах петли из-за того, что один должен пройти меньшее расстояние, так как детектор сместился из-за вращения петли.Любезно предоставлено Википедией.
Эффект Саньяка – это изменение времени прохождения двух световых лучей вокруг петли из-за вращения самой системы.
Разность фаз световых лучей зависит от сдвига полосы интерференционной картины. А довольно простая формула (предоставленная самим Саньяком), связывающая разность фаз со скоростью вращения, дает чрезвычайно точный и надежный гироскоп. Вот видео живого эксперимента с эффектом Саньяка.Фазовый сдвиг, наблюдаемый в оптических гироскопах, когда система начинает вращаться.Любезно предоставлено Gfycat.
В следующий раз мы рассмотрим дизайн двух оптических гироскопов.
Что такое гироскоп? Каков принцип работы гироскопа?
Вращательное движение происходит вокруг оси, которую мы называем осью вращения. Например, колесо автомобиля вращается вокруг фиксированной оси. Колесо не качается. Если он будет качаться, вам все равно придется отвести его к механику.
Но иногда ось вращения может менять направление. Гироскоп, который вы видите на видео ниже, является одним из лучших примеров этого.Гироскоп падает, хотя маховик внутри (маховик) не вращается.
Но не падает при вращении маховика. Но на этот раз он начинает раскачиваться вокруг оси вращения из-за крутящего момента, создаваемого силой тяжести. Чтобы полностью понять движение гироскопа, необходимо иметь глубокое понимание основных вопросов физики, таких как угловой момент и крутящий момент.
Гироскопы используются для ориентации в самолетах и iPad. Это на твоих телефонах.Таким образом, вы можете играть в автомобильные гонки, наклоняя телефон справа налево. Вы можете сделать снимок с углом обзора 360 градусов. Конечно, в ваших телефонах есть микроэлектромеханическая (MEMS) версия вместо такой системы, как следующая. Потому что он должен быть маленьким
Реклама. Прокрутите, чтобы продолжить чтение.Наш мир также имеет ось вращения и совершает колебательное движение. Полный цикл колебания длится 26000 лет. Протоны в молекулах воды в наших телах также вращаются и колеблются вокруг своей оси вращения.Физики могут изменять период этого колебательного движения, и, используя эту функцию, они разработали устройство магнитно-резонансной томографии. Ежегодно миллионы людей проходят МРТ в больницах, и миллионы людей спасаются благодаря раннему обнаружению. Физика работает!
Движение возникает, когда к объекту, вращающемуся вокруг оси гироскопа, прилагается внешний крутящий момент в направлении, перпендикулярном оси вращения. Это вращение вокруг оси вращения обнаруживается, информация об этом вращении передается на двигатель или другое устройство, которое прикладывает крутящий момент в противоположном направлении.Таким образом движение отменяется и сохраняется ориентация. Движения также можно избежать, используя два гироскопа, расположенных перпендикулярно друг другу.