
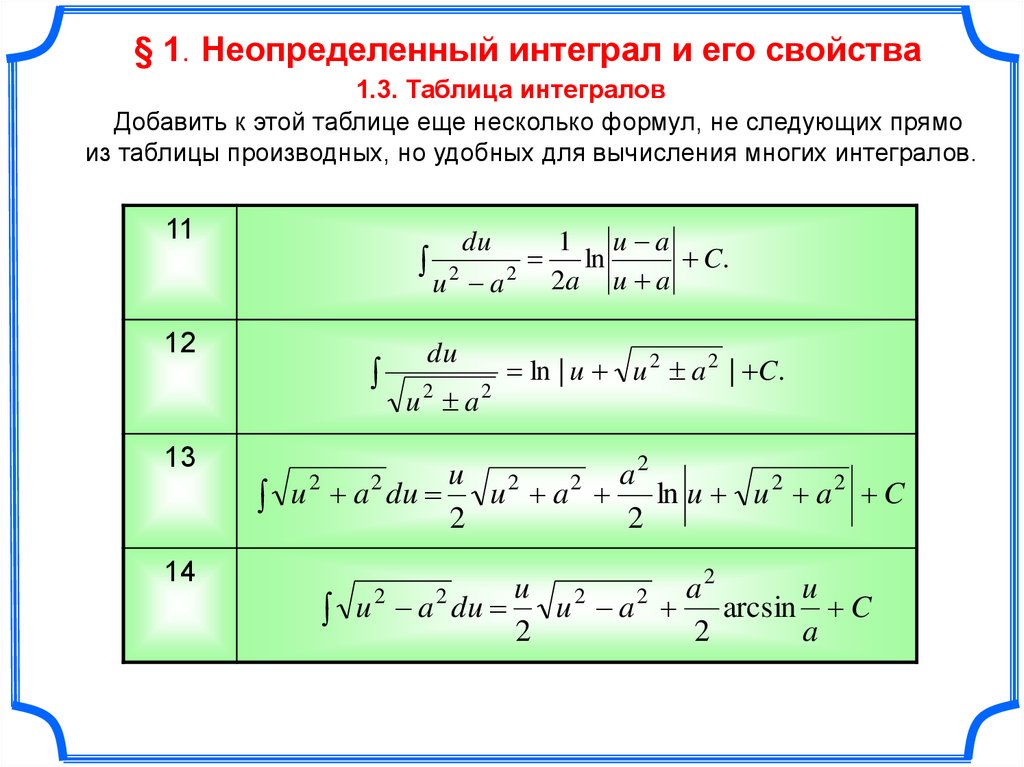
5.12. Производная интеграла, зависящего от параметра
Пусть в определенном интеграле пределы интегрирования и подынтегральная функция зависят от некоторого параметра , т.е. интеграл имеет вид
.
Требуется найти производную интеграла по этому параметру . Будем считать, что функции , – дифференцируемые функции по .
Рассмотрим отдельно три случая, когда в интеграле зависят от параметра либо подынтегральная функция, либо какой-то из пределов интегрирования.
1. Пусть .
Найдем
Используем теорему Лагранжа о конечном приращении функции, запишем
, где .
Тогда . Следовательно,
.
Пример 5.17. Найти , если .
.
Пусть от параметра зависит верхний предел интегрирования, т. е.
. Найдем
.
По теореме о среднем
, где .
Тогда
. Следовательно,
Следовательно,
.
Если верхний предел интегрирования сложная функция , то производная интеграла найдется как производная сложной функции, т. е.
.
В практических задачах нередко требуется найти производную по x от интеграла . В этом интеграле x под интегралом – это переменная интегрирования, а верхний предел x является фактически параметром. Поэтому
.
3. Если от параметра зависит только нижний предел интегрирования, то переставим верхний и нижний предел интегрирования и получим
.
Используем формулы дифференцирования сложной функции нескольких переменных, получим производную интеграла, зависящего от параметра в общем случае или
.
Данная формула называется формулой Лейбница.
Пример 5.18. Найти , если .
Находим
.
Пример 5. 19.
Найти рекуррентное соотношение для
вычисления интеграла
,
зависящего от параметра.
19.
Найти рекуррентное соотношение для
вычисления интеграла
,
зависящего от параметра.
Данный интеграл называется гамма-функцией. Он часто используется в математической статистике и других прикладных разделах высшей математики.
Найдем .
При применим интегрирование по частям. Получим
,
так как .
Таким образом
.
Получим формулу для нахождения при n целом. Так .как. , то , , и т. д.
Глава 6. Двойные интегралы
6.1. Определение двойного интеграла
Двойные интегралы являются обобщением понятием определенного интеграла на случай функции двух переменных.
Рис. 75 | Пусть некоторая
функция двух переменных непрерывная
и ограниченная в некоторой области D плоскости Оxy. |
Назовем диаметром элементарной области наибольшее расстояние между точками этой области. В каждой элементарной области выберем произвольно точку и вычислим значение функции .
Составим сумму , которая называется интегральной.
.
| 1 | Trovare la Derivata – d/dx | натуральный логарифм x | |
| 2 | Вычислим интеграл | интеграл натурального логарифма x по x | |
| 3 | Trovare la Derivata – d/dx | e^x | |
| 4 | Вычислим интеграл | интеграл e^(2x) по x | |
| 5 | Trovare la Derivata – d/dx | 1/x | |
| 6 | Trovare la Derivata – d/dx | x^2 | |
| 7 | Trovare la Derivata – d/dx | 1/(x^2) | |
| 8 | Trovare la Derivata – d/dx | sin(x)^2 | |
| 9 | Trovare la Derivata – d/dx | sec(x) | |
| 10 | Вычислим интеграл | интеграл e^x по x | |
| 11 | Вычислим интеграл | интеграл x^2 по x | |
| 12 | Вычислим интеграл | интеграл квадратного корня из x по x | |
| 13 | Trovare la Derivata – d/dx | cos(x)^2 | |
| 14 | Вычислим интеграл | интеграл 1/x по x | |
| 15 | Вычислим интеграл | интеграл sin(x)^2 по x | |
| 16 | Trovare la Derivata – d/dx | x^3 | |
| 17 | Trovare la Derivata – d/dx | sec(x)^2 | |
| 18 | Вычислим интеграл | интеграл cos(x)^2 по x | |
| 19 | Вычислим интеграл | интеграл sec(x)^2 по x | |
| 20 | Trovare la Derivata – d/dx | e^(x^2) | |
| 21 | Вычислим интеграл | интеграл в пределах от 0 до 1 кубический корень из 1+7x по x | |
| 22 | Trovare la Derivata – d/dx | sin(2x) | |
| 23 | Trovare la Derivata – d/dx | tan(x)^2 | |
| 24 | Вычислим интеграл | интеграл 1/(x^2) по x | |
| 25 | Trovare la Derivata – d/dx | 2^x | |
| 26 | График | натуральный логарифм a | |
| 27 | Trovare la Derivata – d/dx | cos(2x) | |
| 28 | Trovare la Derivata – d/dx | xe^x | |
| 29 | Вычислим интеграл | интеграл 2x по x | |
| 30 | Trovare la Derivata – d/dx | ( натуральный логарифм от x)^2 | |
| 31 | Trovare la Derivata – d/dx | натуральный логарифм (x)^2 | |
| 32 | Trovare la Derivata – d/dx | 3x^2 | |
| 33 | Вычислим интеграл | интеграл xe^(2x) по x | |
| 34 | Trovare la Derivata – d/dx | 2e^x | |
| 35 | Trovare la Derivata – d/dx | натуральный логарифм 2x | |
| 36 | Trovare la Derivata – d/dx | -sin(x) | |
| 37 | Trovare la Derivata – d/dx | 4x^2-x+5 | |
| 38 | Trovare la Derivata – d/dx | y=16 корень четвертой степени из 4x^4+4 | |
| 39 | Trovare la Derivata – d/dx | 2x^2 | |
| 40 | Вычислим интеграл | интеграл e^(3x) по x | |
| 41 | Вычислим интеграл | интеграл cos(2x) по x | |
| 42 | Trovare la Derivata – d/dx | 1/( квадратный корень из x) | |
| 43 | Вычислим интеграл | интеграл e^(x^2) по x | |
| 44 | Вычислить | e^infinity | |
| 45 | Trovare la Derivata – d/dx | x/2 | |
| 46 | Trovare la Derivata – d/dx | -cos(x) | |
| 47 | Trovare la Derivata – d/dx | sin(3x) | |
| 48 | Trovare la Derivata – d/dx | 1/(x^3) | |
| 49 | Вычислим интеграл | интеграл tan(x)^2 по x | |
| 50 | Вычислим интеграл | интеграл 1 по x | |
| 51 | Trovare la Derivata – d/dx | x^x | |
| 52 | Trovare la Derivata – d/dx | x натуральный логарифм от x | |
| 53 | Trovare la Derivata – d/dx | x^4 | |
| 54 | Оценить предел | предел (3x-5)/(x-3), если x стремится к 3 | |
| 55 | Вычислим интеграл | интеграл x^2 натуральный логарифм x по x | |
| 56 | Trovare la Derivata – d/dx | f(x) = square root of x | |
| 57 | Trovare la Derivata – d/dx | x^2sin(x) | |
| 58 | Вычислим интеграл | интеграл sin(2x) по x | |
| 59 | Trovare la Derivata – d/dx | 3e^x | |
| 60 | Вычислим интеграл | интеграл xe^x по x | |
| 61 | Trovare la Derivata – d/dx | y=x^2 | |
| 62 | Trovare la Derivata – d/dx | квадратный корень из x^2+1 | |
| 63 | Trovare la Derivata – d/dx | sin(x^2) | |
| 64 | Вычислим интеграл | интеграл e^(-2x) по x | |
| 65 | Вычислим интеграл | интеграл натурального логарифма квадратного корня из x по x | |
| 66 | Trovare la Derivata – d/dx | e^2 | |
| 67 | Trovare la Derivata – d/dx | x^2+1 | |
| 68 | Вычислим интеграл | интеграл sin(x) по x | |
| 69 | Trovare la Derivata – d/dx | arcsin(x) | |
| 70 | Оценить предел | предел (sin(x))/x, если x стремится к 0 | |
| 71 | Вычислим интеграл | интеграл e^(-x) по x | |
| 72 | Trovare la Derivata – d/dx | x^5 | |
| 73 | Trovare la Derivata – d/dx | 2/x | |
| 74 | Trovare la Derivata – d/dx | натуральный логарифм 3x | |
| 75 | Trovare la Derivata – d/dx | x^(1/2) | |
| 76 | Trovare la Derivata – d/d@VAR | f(x) = square root of x | |
| 77 | Trovare la Derivata – d/dx | cos(x^2) | |
| 78 | Trovare la Derivata – d/dx | 1/(x^5) | |
| 79 | Trovare la Derivata – d/dx | кубический корень из x^2 | |
| 80 | Вычислим интеграл | интеграл cos(x) по x | |
| 81 | Вычислим интеграл | интеграл e^(-x^2) по x | |
| 82 | Trovare la Derivata – d/d@VAR | f(x)=x^3 | |
| 83 | Вычислим интеграл | интеграл 4x^2+7 в пределах от 0 до 10 по x | |
| 84 | Вычислим интеграл | интеграл ( натуральный логарифм x)^2 по x | |
| 85 | Trovare la Derivata – d/dx | логарифм x | |
| 86 | Trovare la Derivata – d/dx | arctan(x) | |
| 87 | Trovare la Derivata – d/dx | натуральный логарифм 5x | |
| 88 | Trovare la Derivata – d/dx | 5e^x | |
| 89 | Trovare la Derivata – d/dx | cos(3x) | |
| 90 | Вычислим интеграл | интеграл x^3 по x | |
| 91 | Вычислим интеграл | интеграл x^2e^x по x | |
| 92 | Trovare la Derivata – d/dx | 16 корень четвертой степени из 4x^4+4 | |
| 93 | Trovare la Derivata – d/dx | x/(e^x) | |
| 94 | Оценить предел | предел arctan(e^x), если x стремится к 3 | |
| 95 | Вычислим интеграл | интеграл (e^x-e^(-x))/(e^x+e^(-x)) по x | |
| 96 | Trovare la Derivata – d/dx | 3^x | |
| 97 | Вычислим интеграл | интеграл xe^(x^2) по x | |
| 98 | Trovare la Derivata – d/dx | 2sin(x) | |
| 99 | Вычислить | sec(0)^2 | |
| 100 | Trovare la Derivata – d/dx | натуральный логарифм x^2 |
– Как вычислить производную от этого интеграла?
спросил
Изменено 3 года назад
Просмотрено 87 тысяч раз
$\begingroup$
Вот он:
$$ \ frac {\ mathrm d} {\ mathrm dx} \ left ( \ int _ {\ cos x} ^ {\ sin x} {\ sin \ left ( t ^ 3 \ right) \ mathrm dt} \ right) $$ 9{3}х \справа)\sin х $
Итак, сначала я вычисляю примитив, а затем вывожу его. Но я не знаю, как интегрировать. Должен ли я использовать метод «замены»? Я пытался, но потом меня заблокировали…
Но я не знаю, как интегрировать. Должен ли я использовать метод «замены»? Я пытался, но потом меня заблокировали…
- исчисление
- интеграция
$\endgroup$
$\begingroup$
Я так понял из комментариев, что вы пока не совсем довольны ответами. Вот почему я пробую это (с небольшой задержкой). Заметьте, ничего нового в этом ответе нет… 93) \cos x.$$
Надеюсь, это поможет вам.
$\endgroup$
0
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Что такое ПИД-регулятор: Пропорционально-интегрально-дифференциальный
ПИД-регулятор (пропорционально-интегрально-дифференциальный) является наиболее часто используемой системой управления с обратной связью в промышленной автоматизации. У него есть приложения, в которых нам нужно постоянно контролировать переменный параметр. В этой статье мы обсудим что такое ПИД-регулирование? это приложения и как работает ПИД-регулирование? Нажмите на эту ссылку, чтобы узнать о преимуществах автоматизации производства.
Содержание
- Что такое ПИД-регулятор?
- Зачем нужен ПИД-регулятор?
- Как работает ПИД-регулятор?
- Пропорциональный коэффициент
- Интегральный коэффициент
- Производный коэффициент
- Ответ ПИД-регулятора
- Настройка ПИД-регулятора
Что такое ПИД-регулятор?
ПИД-регулятор — это система управления с обратной связью, которая измеряет выходную переменную процесса и изменяет входную величину в соответствии со значением ошибки. Значение ошибки представляет собой разницу между заданным значением и измеренной переменной процесса.
Значение ошибки представляет собой разницу между заданным значением и измеренной переменной процесса.
ПИД-регуляторы управляют процессом так же, как люди управляют процессом. Например, водить велосипед с постоянной скоростью. Нам нужно изменить дроссельную заслонку велосипеда в соответствии со значением ошибки (требуемое значение – фактическое значение).
На языке системы управления, чтобы управлять велосипедом с постоянной скоростью, мы получаем данные от спидометра велосипеда, прогнозируем и анализируем ошибку скорости и предпринимаем соответствующие действия (изменяем дроссель).
Управление расходом жидкости с помощью ПИД-регулятораПИД-регуляторы работают аналогично описанному выше процессу. Во-первых, он сравнивает уставку и измеренные переменные процесса. Предскажите будущие ошибки и измените ввод, чтобы уменьшить значение ошибки до нуля.
ПИД-регуляторы применяются в круиз-контроле автомобиля, управлении полетом квадрокоптера, управлении потоком жидкости, контроле температуры и т. д.
д.
Зачем нужен ПИД-регулятор?
Традиционное управление ON-OFF может только включать или выключать процесс. Например, регулирующий клапан закрыт или открыт для управления потоком воды в традиционных контроллерах. Поэтому система управления демонстрирует колебательный характер, и точность системы также снижается.
Традиционный двухпозиционный контроллерПИД-регуляторы решают проблемы традиционных контроллеров, предсказывая будущие ошибки и предпринимая соответствующие корректирующие действия. Таким образом, мы можем точно контролировать процесс в небольших заданных пределах.
ПИД-регуляторы используются в высокоточных и критических приложениях, таких как стабильный полет квадрокоптера. Невозможно использовать ПИД-регуляторы для управления каждым процессом. Вы должны использовать ПИД-регулятор в соответствии с требованиями.
Как работает ПИД-регулятор?
ПИД-регулирование использует пропорциональное, интегральное и дифференциальное усиление для управления переменной процесса или выходом системы. Они получают входные данные от выходных данных процесса и сравнивают их со значением уставки для расчета сигнала ошибки.
Они получают входные данные от выходных данных процесса и сравнивают их со значением уставки для расчета сигнала ошибки.
Значение ошибки обрабатывается с использованием пропорционального, производного и интегрированного регуляторов. ПИД-регулятор обеспечивает ввод в систему в соответствии со значением ошибки для управления переменной процесса.
Работа ПИД-регулятора.Мы можем рассчитать пропорциональное, интегральное и дифференциальное усиление, используя различные методы стабилизации контроллера. Во-первых, нам нужно понять работу и влияние пропорционального, производного и интегрального усиления на переменные процесса, чтобы понять работу ПИД-регулятора .
Пропорциональное усиление
Пропорциональное усиление изменяет процесс в соответствии со значением ошибки. Математически это равно Ошибка процесса и Константа пропорционального усиления (Kp), кратная .
Формула расчета пропорционального усиления Чем выше значение константы пропорционального усиления, тем выше влияние значения ошибки на процесс. Поэтому более высокие значения постоянной пропорционального усиления могут привести к нестабильности системы.
Поэтому более высокие значения постоянной пропорционального усиления могут привести к нестабильности системы.
Но если значение пропорционального усиления мало, процесс будет меньше реагировать на ошибку. Поэтому всегда рекомендуется оптимизировать значения констант пропорционального усиления.
Коэффициент интегрирования
Интегральный контроллер интегрирует значение ошибки до тех пор, пока ошибка не станет равной нулю. Следовательно, это помогает достичь нулевой стационарной ошибки.
Расчет интегрального усиления ФормулаИнтегральный контроллер улучшает стабильность системы, ограничивая любое быстрое изменение отклика системы.
Производное усиление
Производные контроллеры способны прогнозировать будущие ошибки. Его значение зависит от скорости изменения значения ошибки.
Производное управление уменьшает выход процесса, если переменная процесса быстро увеличивается. Производное усиление имеет небольшой вклад в ПИД-регулятор, поскольку он очень чувствителен к шуму системы.
Ответ ПИД-регулятора
На приведенном ниже графике показано влияние значений пропорционального усиления (Kp), интегрального усиления (Ki) и дифференциального усиления (Kd) на выходную переменную процесса.
Ответ ПИД-регулятораКак показано в приведенном выше примере, если мы используем пропорциональный контроллер для управления переменной процесса (например, температурой). Параметр управления резко меняется, и процесс имеет низкую точность управления.
Но если мы повысим точность процесса, увеличив пропорциональный коэффициент (Kp), вариации возрастут.
Мы можем более точно управлять переменными параметрами, не увеличивая вариацию, используя пропорциональное и интегральное управление (ПИ-регулятор). Но ПИ-регулирование также имеет медленный отклик.
Мы можем повысить точность системы, уменьшить отклонения и улучшить время отклика с помощью ПИД-регулятора. В ПИД-регуляторе производная составляющая помогает быстрее управлять переменными параметрами.
Настройка ПИД-регулятора
Настройка ПИД-регулятора — это процесс управления выходными переменными путем оптимизации значений пропорционального, производного и интегрального усиления. Программное обеспечение для настройки и оптимизации контура, а также различные методы настройки ПИД-регулятора доступны для оптимизации пропорциональных, интегральных и дифференциальных значений коэффициента усиления.
Метод проб и ошибок
При настройке ПИД-регулятора методом проб и ошибок значения усиления оптимизируются методом проб и ошибок. Следующие шаги выполняются для расчета значений усиления.
- Во-первых, значения интегрального усиления и производного усиления поддерживаются равными нулю, а значение пропорционального усиления регулируется для достижения колебательного поведения системы.
- После этого пользователь регулирует интегральное усиление, чтобы остановить колебания.
- Пользователь регулирует усиление производной, чтобы улучшить время отклика.

Метод Зейглера-Николса
Этот метод аналогичен методу проб и ошибок. Но при этом колебательное поведение системы отличается. Мы можем выполнить следующие шаги для расчета значений усиления с использованием метода Зейглера-Николаса.
- Сначала установите интегральное и дифференциальное усиление на ноль и отрегулируйте пропорциональное усиление, чтобы добиться колебательного поведения системы.
- После начала колебаний отмечают критическое усиление Kc и период колебаний Pc.
- После этого пользователь регулирует пропорциональное, интегральное и дифференциальное усиление в соответствии с приведенной ниже таблицей Цейглера-Николса.
| Ziegler-Nichols Tuning | |||
| Control Type | Kp | Ki | Kd |
|---|---|---|---|
| P | 0.5 x Kc | – | – |
| PI | 0.45 x Kc | Pc / 1,2 | – |
| PID | 0,60 x Kc | 0,5 x Pc | Pc / 8 |
Подводя итог, можно сказать, что алгоритмы ПИД-регулирования являются самым простым способом разработки надежной системы управления.