
ГИРОСКОП У ТЕБЯ ДОМА Простейшим гироскопом является обыкновенный детский волчок, быстро вращающийся вокруг своей оси. Ось волчка может изменять своё положение в пространстве, поскольку её верхний конец не закреплен. У гироскопов , применяемых в технике, свободный поворот оси можно обеспечить, закрепив её в рамках карданова подвеса, позволяющего оси волчка занять любое положение в пространстве. Такой гироскоп имеет 3 степени свободы. Первое свойство гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство гироскопа использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси в 1852 г.. Отсюда и само название «гироскоп», что в переводе означает «наблюдать вращение». Второе свойство гироскопа обнаруживается, когда на его ось начинают действовать сила или пара сил, стремящиеся привести ось в движение. Под действием силы конец оси гироскопа будет отклоняться в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой начнёт вращаться вокруг оси , притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси сам гироскоп. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось мгновенно остановится, т. е. прецессионное движение гироскопа безынерционно. Прецессионное движение можно наблюдать и у детского волчка. Устали? – Отдыхаем! |


Гироскопический эффект – Автомобили – Коммерсантъ
Иван Баранцев
Жан Бернар Леон Фуко известен не только созданием одноименного маятника, но еще и изобретением гироскопа – устройства, способного реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета.
Петр Петрович на этом снимке сидит рядом с шофером. Шиловский происходил из старинного дворянского рода, окончил Императорское училище правоведения, начал карьеру судебным следователем в Луге и дослужился до чина статского советника, занимавшего должности Костромского, а затем Олонецкого губернатора. Еще Петр Петрович Шиловский был известен как инженер, изобретатель и пионер гироскопической техники. В 1910 году он предложил Военному ведомству идею однорельсовой дороги, но все утонуло в бюрократической переписке.
Судьба гирокара типична для многих русских изобретений.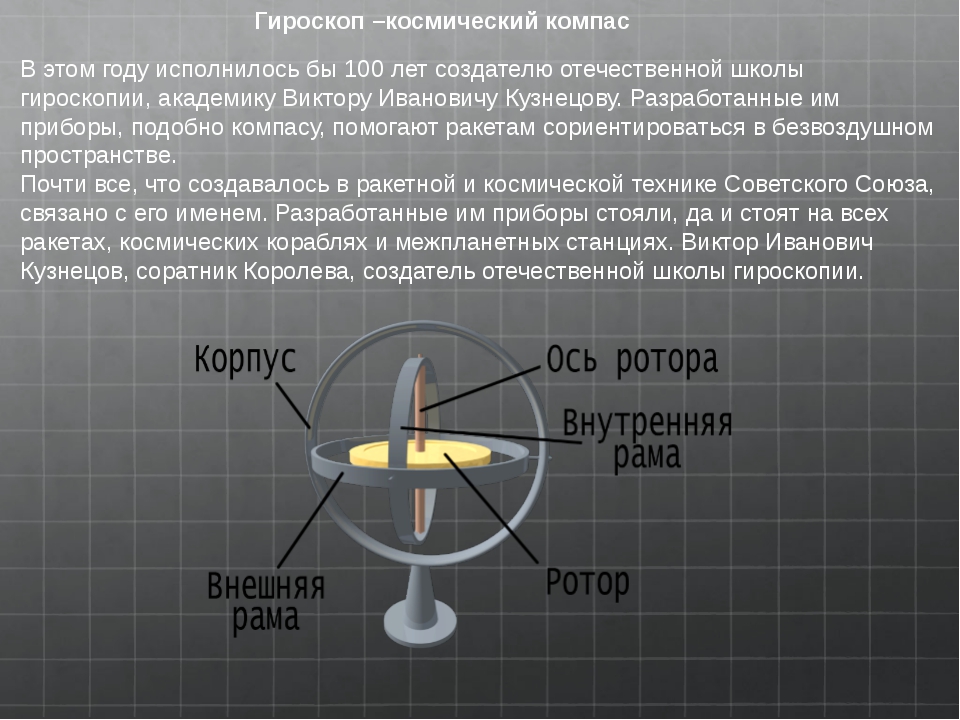 Не найдя поддержки в России, он в 1912 году на собственные средства заказал британской фирме Wolseley постройку двухколесного автомобиля по собственным чертежам. Процесс растянулся надолго. В октябре того же года тестировались подвеска и двигатель, летом 1913 года – шасси целиком, и только в ноябре гирокар был готов. В апреле 1914 года в лондонском Риджентс-парке состоялась первая демонстрационная поездка, во время которой и была сделана эта фотография.
Не найдя поддержки в России, он в 1912 году на собственные средства заказал британской фирме Wolseley постройку двухколесного автомобиля по собственным чертежам. Процесс растянулся надолго. В октябре того же года тестировались подвеска и двигатель, летом 1913 года – шасси целиком, и только в ноябре гирокар был готов. В апреле 1914 года в лондонском Риджентс-парке состоялась первая демонстрационная поездка, во время которой и была сделана эта фотография.
Гироскоп находился посередине автомобиля и приводился в движение небольшим электродвигателем мощностью 1,25 л. с., который, в свою очередь, работал от магнето на двигателе внутреннего сгорания под капотом. Радиатор системы охлаждения размещался за двигателем и перед шофером, а единственный тормоз у гирокара был трансмиссионным и находился на валу сразу за коробкой передач. Гироскоп наклонялся в обе стороны на 25 градусов, а по обеим сторонам гироскопического механизма были подвешены еще два маятника весом по 47 кг.
Об изобретении Шиловского написала не только британская пресса, но и российская. В статье из журнала “Аэро- и автомобильная жизнь” N 10 за 1914 год особо отмечались такие типичные для нашей страны преимущества, как “большая экономия в шинах”, а также то, что “при езде на двухколесном автомобиле по плохим дорогам всегда будет легче выбрать наименее испорченную часть пути, чем при езде на четырехколесках”. Кстати, в дореволюционной России гирокар Шиловского называли “жирокаром”, а гироскоп – “жироскопом”.
Создатель горизонта : Газета Знамя
15 мая 2013 г. 00:00
«Один из Совета главных» — под таким названием проходит выставка, посвященная 100-летию со дня рождения главного конструктора Виктора Кузнецова. «Один из Совета главных» — под таким названием проходит выставка, посвященная 100-летию со дня рождения главного конструктора Виктора Кузнецова.
Виктор Иванович — один из создателей ракетной гироскопической техники, то есть устройств, позволяющих ориентироваться в отсутствие земного тяготения. Гироскоп — термин, состоящий из двух греческих слов — «кружусь» и «наблюдаю», и простейший гироскоп был у каждого из нас в детстве — волчок. Задачи его — определение курса, угловой скорости и углового ускорения, создание искусственного горизонта, уменьшение влияния качки на точность стрельбы артиллерийских орудий на самолете, корабле, танке. Гироскоп необходим для навигации, стабилизации автоматического управления движения самолетов, торпед.
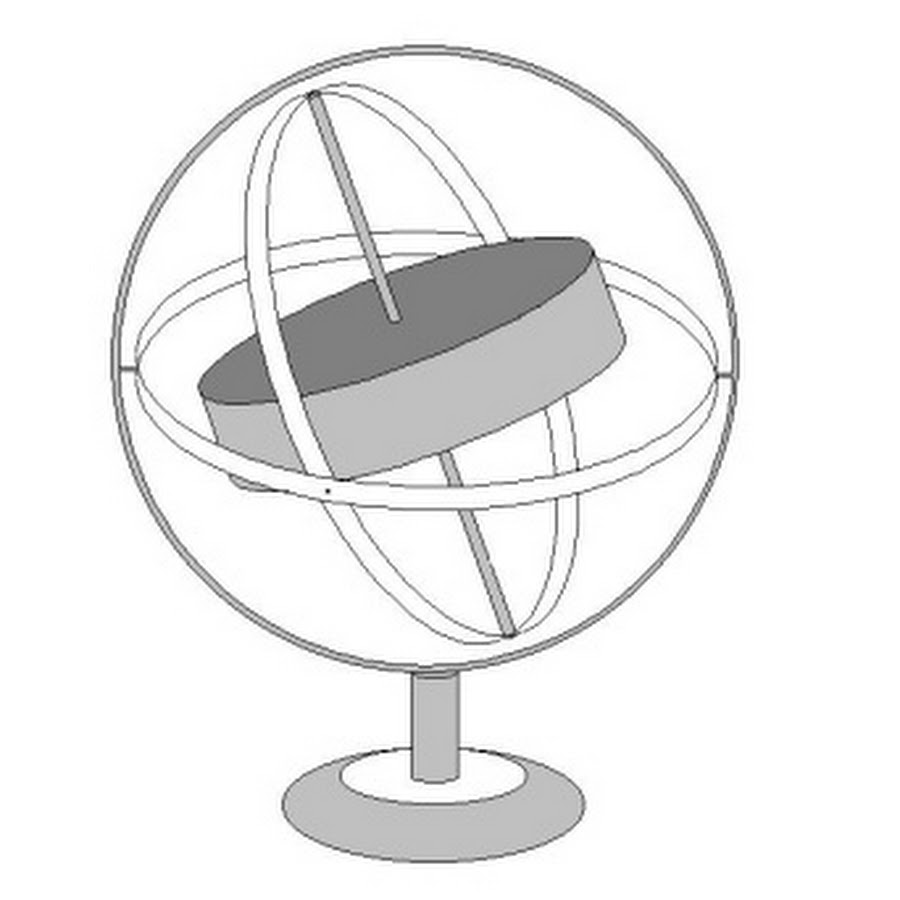
Модные настольные украшения — система вращающихся долгое время по разным осям колец — тоже гироскопы, хоть и бесполезные.
Кузнецов, москвич по рождению, в юности работал на керамическом комбинате в городе Боровичи. Уже будучи студентом Ленинградского индустриального института, занимался проектированием гироскопических приборов. С 1938 года на заводе «Электроприбор» в должности инженера-исследователя продолжил работу для корабельной артиллерии.
Во время Великой Отечественной войны ученый разрабатывал гироскопы для кораблей и танков, легендарная результативность чудо-машины Т-34 — это и его заслуга. В 1945 году Виктора Ивановича отправили в Германию для изучения гироскопическх приборов ракет «Фау-2». Знаменитое «оружие возмездия», долетавшее из Германии до Лондона, дало новый импульс к созданию космических и стратегических ракет как в США, так и в СССР. Во время этой командировки ученый познакомился с будущим Генеральным конструктором С.П. Королевым, и тот пригласил его в Совет главных конструкторов, разрабатывавших ракетную технику. И на первом корабле Гагарина, и на тех баллистических ракетах, что с ревом и грохотом провозят во время парада Победы на Красной площади, — гироскопы Виктора Кузнецова. Они — как «улитка» в ухе человека — помогают не сбиться с курса, не спутать верх с низом.
По инициативе ученого в 1955 году был создан НИИ гироскопической техники, где он до самой смерти в 1991 году оставался главным конструктором.
На выставке представлены юношеские чертежи, приборы для крылатых ракет, тетради с рабочими записями, профсоюзный билет, многочисленные подарки.
Блещет офицерский кортик — дар от благодарных моряков за меткие выстрелы орудий. Летные куртка и шлем — знак признательности летчиков, получивших от ученого безупречную систему навигации.
И на памятной медали, выпущенной к юбилею Виктора Ивановича, — спутник Земли и гироскоп, позволяющий аппарату не сбиться с пути.
Эта выставка — напоминание о времени, когда страна была на переднем крае науки и техники, причем абсолютно оригинальной. Тогда космос из предчувствия стал реальностью, начал работать на людей. Это была победа не менее важная для человечества, чем 9 Мая. Вспомнить о тех годах вы сможете на экс-позиции в музее истории космонавтики.
«Хранить постоянно» – Публикации в СМИ
21.04.2021«Хранить постоянно»
В открытый доступ выложили документы о покорении космоса
 04.2021
04.2021К 60-летию первого полета человека в космос Центральный государственный архив научно-технической документации (ЦГАНТД) Санкт-Петербурга совместно с архивом кинофотофонодокументов подготовил виртуальный проект «Как первыми сумели достичь заветной цели…». В открытый доступ на интернет-портале «Архивы Санкт-Петербурга» выложены оцифрованные копии документов, которые еще не так давно были засекречены. Они рассказывают о предприятиях и научных организациях Ленинграда, участвовавших в космической программе СССР.
— Практически все документы, связанные с космическими разработками, имеют пометку «Хранить постоянно». Они показывают и доказывают, что наш город всегда был признанным центром космической отрасли и приборостроения. В этом направлении трудились ученые нынешних «ЛЭТИ», ИТМО, ГУАПа, Политехнического университета и других научных центров.
В этом направлении трудились ученые нынешних «ЛЭТИ», ИТМО, ГУАПа, Политехнического университета и других научных центров.
— Едва ли не главная заслуга ленинградских ученых — разработка гироскопа: прибора, который служит для того, чтобы определять и реагировать на изменение положения аппарата в пространстве. Детский волчок — тоже своего рода простейший гироскоп, —пояснила замдиректора архива Любовь Чурина.
Понятно, что в условиях холодной войны и космической гонки между СССР и США работа велась в условиях строгой секретности. Не могло быть ни малейшей утечки информации. До недавнего времени был засекречен даже список сотрудников ЦНИИ № 303 («Электроприбор»), награжденных указом президиума Верховного Совета СССР от 17 июня 1961 года орденами и медалями – за успешное выполнение спецзадания правительства по созданию образцов космической техники. Теперь документ доступен широкой публике.
Именно в ЦНИИ № 303 трудился Сергей Фармаковский, под руководством которого была создана гироскопическая система «Сфинкс» для ориентации и стабилизации в пространстве космических аппаратов и искусственных спутников Земли. Одновременно он возглавлял кафедру навигационных приборов в ЛИТМО. Другой видный ученый, Анатолий Лурье, руководил кафедрой динамики и прочности машин в Политехническом институте — там также занимались гироскопией.
Одновременно он возглавлял кафедру навигационных приборов в ЛИТМО. Другой видный ученый, Анатолий Лурье, руководил кафедрой динамики и прочности машин в Политехническом институте — там также занимались гироскопией.
Нельзя не упомянуть и Льва Лойцянского, руководителя кафедры гидроаэродинамики в Политехническом институте, крупнейшего специалиста по теории пограничного слоя и турбулентности. Вместе с Анатолием Лурье он создал учебник «Механика жидкости и газа», основные положения которого используются и поныне при расчетах полетов ракет в атмосфере.
Гироскоп — Википедия Wiki Русский 2022
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Также проводятся исследования по созданию ядерных гироскопов, использующих ЯМР для отслеживания изменения спина атомных ядер. [9]
[9]
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трёхстепенного роторного гироскопа
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.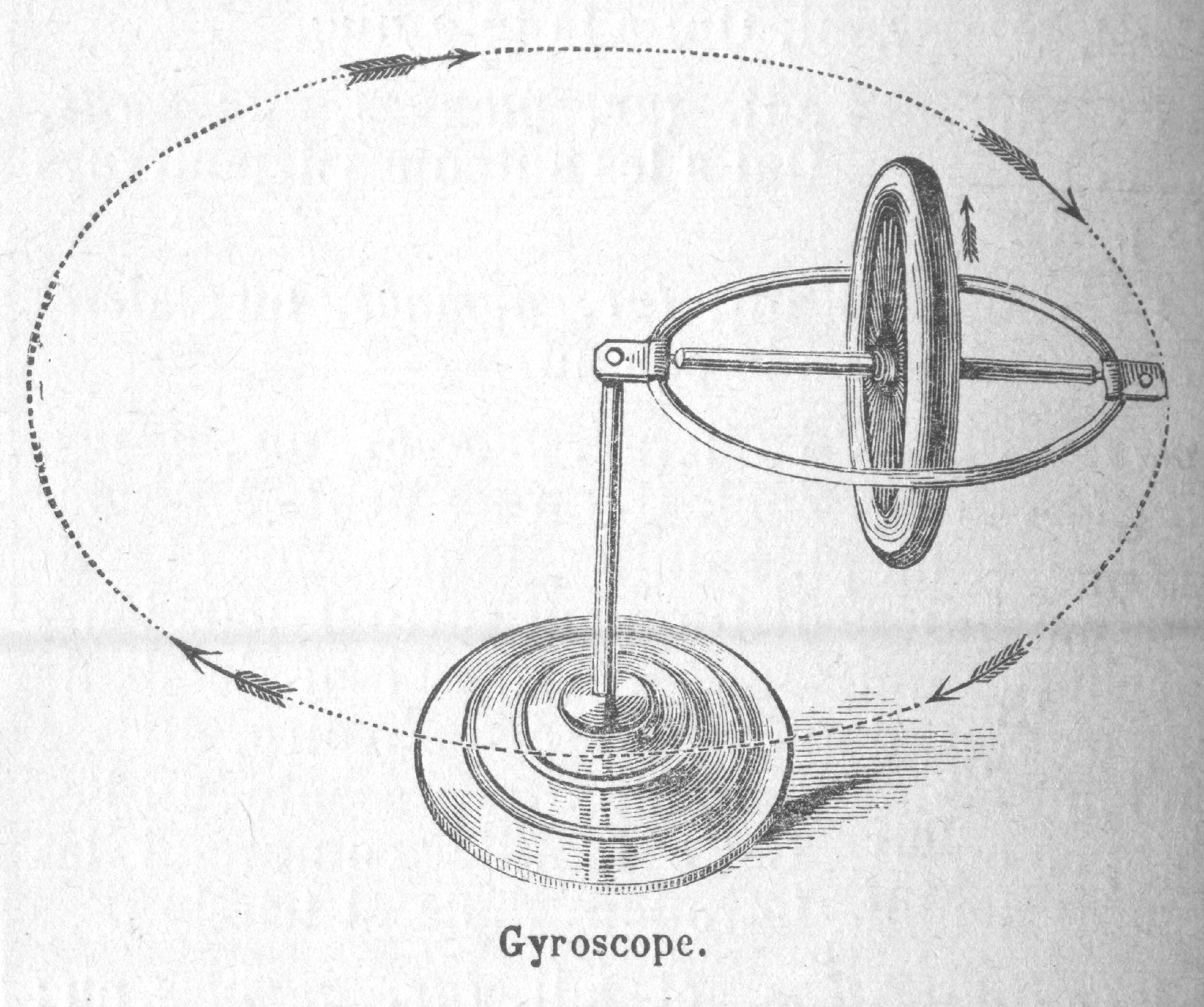
Поведение гироскопа в инерциальной системе отсчёта описывается, согласно следствию второго закона Ньютона, уравнением
- M→=dL→dt,{\displaystyle {\vec {M}}={{d{\vec {L}}} \over {dt}},}
где векторы M→{\displaystyle {\vec {M}}} и L→{\displaystyle {\vec {L}}} являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса.
Изменение вектора момента импульса L→{\displaystyle {\vec {L}}} под действием момента силы возможно не только по величине, но и по направлению. В частности, момент силы M→{\displaystyle {\vec {M}}} , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный L→{\displaystyle {\vec {L}}} , приводит к движению, перпендикулярному как M→{\displaystyle {\vec {M}}} , так и L→{\displaystyle {\vec {L}}} , то есть к явлению прецессии. Угловая скорость прецессии Ω→P{\displaystyle {\vec {\Omega }}_{P}} гироскопа определяется его моментом импульса и моментом приложенной силы[10]:
- M→=Ω→P×L→,{\displaystyle {\vec {M}}={\vec {\Omega }}_{P}\times {\vec {L}},}
то есть Ω→P{\displaystyle {\vec {\Omega }}_{P}} обратно пропорциональна моменту импульса ротора гироскопа, или, при неизменном моменте инерции ротора — скорости его вращения.
Одновременно с возникновением прецессии, согласно следствию третьего закона Ньютона, гироскоп начнёт действовать на окружающие его тела моментом реакции, равным по величине и противоположным по направлению моменту M→{\displaystyle {\vec {M}}} , приложенному к гироскопу. Этот момент реакции называется гироскопическим моментом.
То же движение гироскопа можно трактовать иначе, если воспользоваться неинерциальной системой отсчёта, связанной с кожухом ротора, и ввести в ней фиктивную силу инерции — так называемую кориолисову силу. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие направление своих колебаний при повороте основания.
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на лазерные гироскопы (активные оптические), пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году[11][12]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[13]. В то время как в неинерциальной системе она может отличаться от c[14]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. {2}}},}
{2}}},}
где Δt{\displaystyle \Delta t} -разность времён прихода лучей, выпущенных в разных направлениях, S{\displaystyle S} — площадь контура,Ω{\displaystyle \Omega } — угловая скорость вращения гироскопа.
Так как величина Δt{\displaystyle \Delta t} очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длиной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[11]:
- Δφ=8πSΩλc,{\displaystyle \Delta \varphi ={\frac {8\pi S\Omega }{\lambda c}},}
где λ{\displaystyle \lambda } — длина волны.
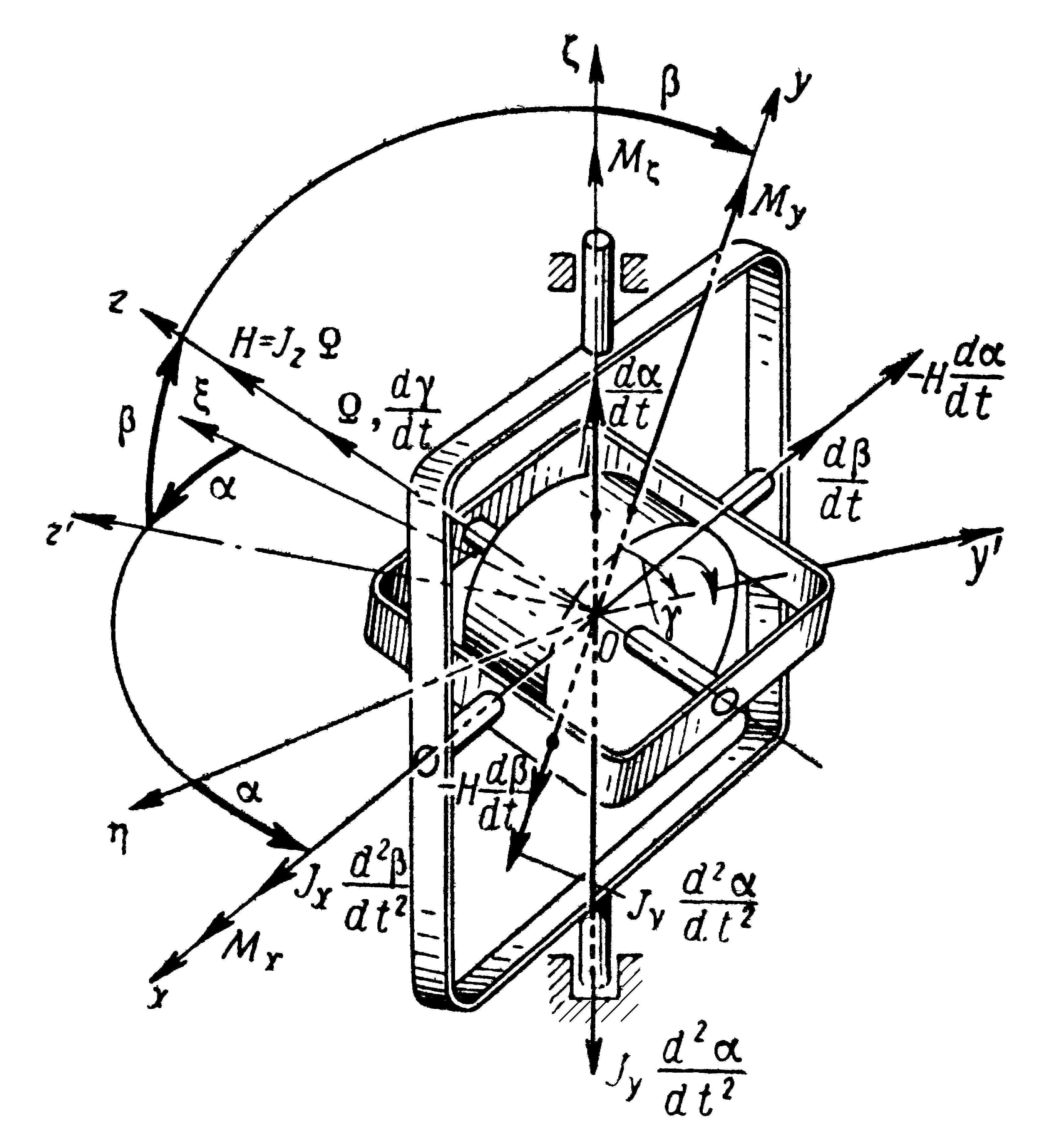
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром (маятником), так как из-за суточного вращения Земли и ухода гироскопа происходит отклонение от истинной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[15].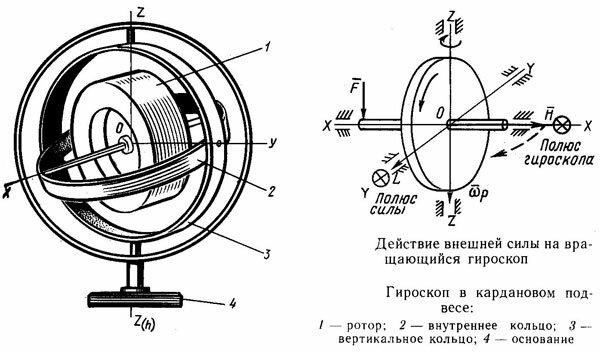
Системы стабилизации
Эти системы необходимы для поддержания желаемого параметра на определенном постоянном уровне. Для этого требуется задание требуемого значения регулируемой величины.[16]
Системы стабилизации бывают трёх основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гироприборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, России выданы тысячи патентов на соответствующие изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопической навигации
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники.Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники.Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические. Однако решение углового положения аппарата в пространстве с использованием СНС систем (многоантенных) хоть и возможно, но весьма затруднено и имеет ряд значимых ограничений, в отличие от гироскопических систем.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолёта двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолёта двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того, прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолёта даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным.Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование в бытовой технике
Значительное удешевление производства МЭМС-датчиков привело к тому, что они все чаще используются в смартфонах и игровых приставках.
Гироскопы применялись в контроллерах для игровых приставок: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii и в более поздних. Вместе с гироскопом в них установлен акселерометр.
Изначально единственным датчиком ориентации в смартфонах был трехосевой МЭМС-акселерометр, чувствительный лишь к ускорению. В состоянии относительного покоя он позволял приблизительно оценить направление вектора силы тяготения Земли (g). С 2010 года смартфоны стали дополнительно оснащаться трёхосевым вибрационным МЭМС-гироскопом, одним из первых был iPhone 4. Иногда также устанавливается магнитометр (электронный компас), позволяющий компенсировать дрейф гироскопов.[17][18]
С 2010 года смартфоны стали дополнительно оснащаться трёхосевым вибрационным МЭМС-гироскопом, одним из первых был iPhone 4. Иногда также устанавливается магнитометр (электронный компас), позволяющий компенсировать дрейф гироскопов.[17][18]
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла), спиннер (волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки).
Кроме того, существует спортивный гироскопический тренажёр.
Ряд радиоуправляемых вертолётов использует гироскоп.
Минимум три гироскопа нужны для полёта мультикоптеров, в частности квадрокоптеров.
Гироскоп – 3D Animation
Гироскоп (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).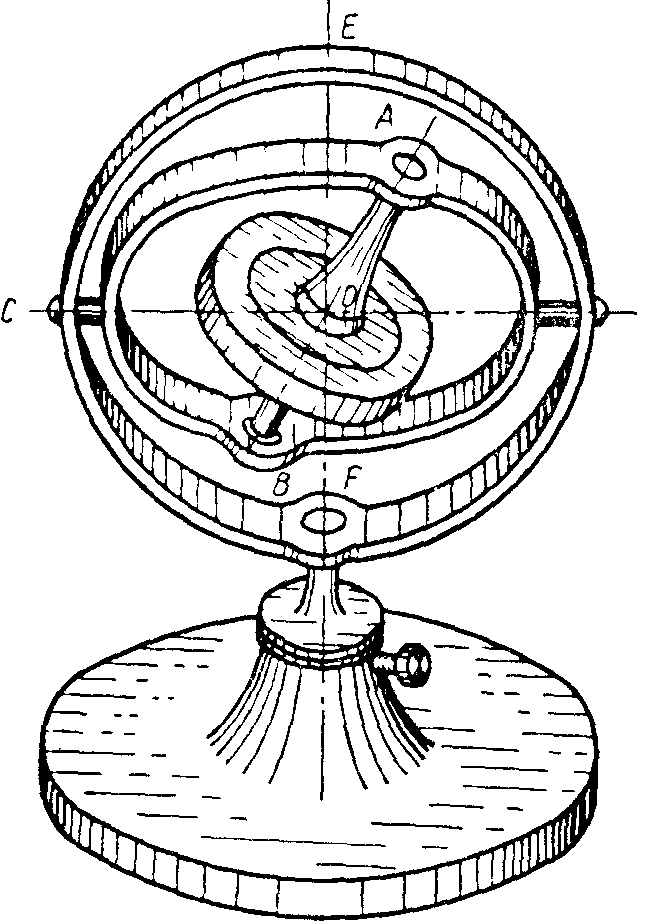
Термин впервые введен Ж. Фуко в своём докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
История
До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издавна люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Древней Греции были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоанн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Классификация
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Также проводятся исследования по созданию ядерных гироскопов, использующих ЯМР для отслеживания изменения спина атомных ядер.[9]
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Поведение гироскопа в инерциальной системе отсчёта описывается, согласно следствию второго закона Ньютона, уравнением
- M→=dL→dt,{\displaystyle {\vec {M}}={{d{\vec {L}}} \over {dt}},}
где векторы M→{\displaystyle {\vec {M}}} и L→{\displaystyle {\vec {L}}} являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса.
Изменение вектора момента импульса L→{\displaystyle {\vec {L}}} под действием момента силы возможно не только по величине, но и по направлению. В частности, момент силы M→{\displaystyle {\vec {M}}}, приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный L→{\displaystyle {\vec {L}}}, приводит к движению, перпендикулярному как M→{\displaystyle {\vec {M}}}, так и L→{\displaystyle {\vec {L}}}, то есть к явлению прецессии. Угловая скорость прецессии Ω→P{\displaystyle {\vec {\Omega }}_{P}} гироскопа определяется его моментом импульса и моментом приложенной силы[10]:
В частности, момент силы M→{\displaystyle {\vec {M}}}, приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный L→{\displaystyle {\vec {L}}}, приводит к движению, перпендикулярному как M→{\displaystyle {\vec {M}}}, так и L→{\displaystyle {\vec {L}}}, то есть к явлению прецессии. Угловая скорость прецессии Ω→P{\displaystyle {\vec {\Omega }}_{P}} гироскопа определяется его моментом импульса и моментом приложенной силы[10]:
- M→=Ω→P×L→,{\displaystyle {\vec {M}}={\vec {\Omega }}_{P}\times {\vec {L}},}
то есть Ω→P{\displaystyle {\vec {\Omega }}_{P}} обратно пропорциональна моменту импульса ротора гироскопа, или, при неизменном моменте инерции ротора — скорости его вращения.
Одновременно с возникновением прецессии, согласно следствию третьего закона Ньютона, гироскоп начнёт действовать на окружающие его тела моментом реакции, равным по величине и противоположным по направлению моменту M→{\displaystyle {\vec {M}}}, приложенному к гироскопу.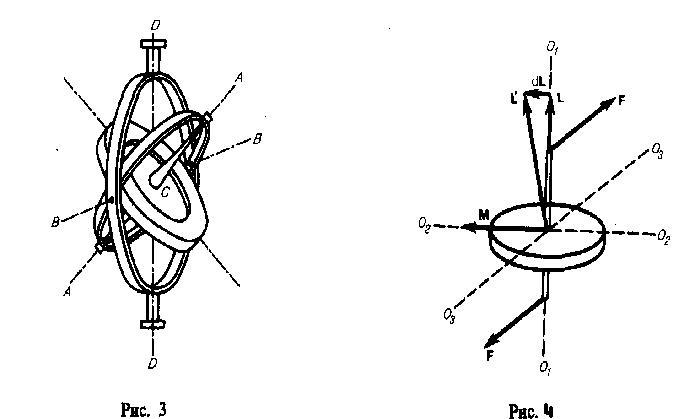 Этот момент реакции называется гироскопическим моментом.
Этот момент реакции называется гироскопическим моментом.
То же движение гироскопа можно трактовать иначе, если воспользоваться неинерциальной системой отсчёта, связанной с кожухом ротора, и ввести в ней фиктивную силу инерции — так называемую кориолисову силу. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие поворачивающие или сохраняющие направление своих колебаний при повороте основания пропорционально угловой скорости (ДУС — датчики угловой скорости) или углу поворота основания (интегрирующие гироскопы). Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности
по сравнению с роторными гироскопами. В англоязычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности
по сравнению с роторными гироскопами. В англоязычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, микромеханические вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сегвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Подобные типы микрогироскопов используются в мобильных устройствах, в частности, в мультикоптерах, фотоаппаратах и видеокамерах (для управления стабилизацией изображения), в смартфонах и т.д[11].
- Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS-гироскопе с частотой ωr{\displaystyle \scriptstyle \omega _{r}}.
При повороте гироскопа возникает Кориолисово ускорение равное a→c=−2(v→×Ω→){\displaystyle \scriptstyle {\vec {a}}_{c}=-2({{\vec {v}}\times {\vec {\Omega }}})}, где v→{\displaystyle \scriptstyle {\vec {v}}} — скорость и Ω→{\displaystyle \scriptstyle {\vec {\Omega }}} — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : Xipωrcos(ωrt){\displaystyle \scriptstyle X_{ip}\omega _{r}\cos(\omega _{r}t)},
а положение грузика в плоскости — Xipsin(ωrt){\displaystyle \scriptstyle X_{ip}\sin(\omega _{r}t)}. Внеплоскостное движение yop{\displaystyle \scriptstyle y_{op}}, вызываемое поворотом гироскопа равно:
Горизонтальная скорость колеблющегося грузика получается как : Xipωrcos(ωrt){\displaystyle \scriptstyle X_{ip}\omega _{r}\cos(\omega _{r}t)},
а положение грузика в плоскости — Xipsin(ωrt){\displaystyle \scriptstyle X_{ip}\sin(\omega _{r}t)}. Внеплоскостное движение yop{\displaystyle \scriptstyle y_{op}}, вызываемое поворотом гироскопа равно:
- yop=Fckop=2mΩXipωrcos(ωrt)kop{\displaystyle y_{op}={\frac {F_{c}}{k_{op}}}={\frac {2m\Omega X_{ip}\omega _{r}\cos(\omega _{r}t)}{k_{op}}}}
- где:
- m{\displaystyle \scriptstyle m} — масса колеблющегося грузика.
- kop{\displaystyle \scriptstyle k_{op}} — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- Ω{\displaystyle \scriptstyle \Omega } — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
- Пьезоэлектрические гироскопы.
- Твёрдотельные волновые гироскопы[12][13]. Работа одной из разновидностей ТВГ разработанные с 80-х гг.
 компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Резонаторы подобных КВГ вибрируют по второй форме колебаний (как и в HRG). Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний.
компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Резонаторы подобных КВГ вибрируют по второй форме колебаний (как и в HRG). Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления (компенсационная обратная связь — КОС) гасит парную форму колебания к нулю. Амплитуда силы (то есть сигнал пропорциональные току или электрическому напряжению в цепи КОС), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной аналогично КОС маятниковых акселерометров и классических роторных ДУС. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений). Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов.
Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления (компенсационная обратная связь — КОС) гасит парную форму колебания к нулю. Амплитуда силы (то есть сигнал пропорциональные току или электрическому напряжению в цепи КОС), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной аналогично КОС маятниковых акселерометров и классических роторных ДУС. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений). Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов. В любом случае, их добротность теоретически ограничена величинами порядка 100 тыс. (на практике, обычно, не выше 20 тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов КВГ из кварцевого стекла или монокристаллов, используемых для «стратегических» применений.
В любом случае, их добротность теоретически ограничена величинами порядка 100 тыс. (на практике, обычно, не выше 20 тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов КВГ из кварцевого стекла или монокристаллов, используемых для «стратегических» применений. - Камертонные гироскопы.
- Вибрационные роторные гироскопы (в том числе динамически настраиваемые гироскопы)[14].
- МЭМС-гироскопы[14].
Оптические гироскопы
Делятся на лазерные (активные оптические) гироскопы, пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году[14][15]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[16]. В то время как в неинерциальной системе она может отличаться от c[17]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. {2}}},}
{2}}},}
где Δt{\displaystyle \Delta t} -разность времён прихода лучей, выпущенных в разных направлениях, S{\displaystyle S} — площадь контура,Ω{\displaystyle \Omega } — угловая скорость вращения гироскопа. Так как величина Δt{\displaystyle \Delta t} очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длиной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[14]:
- Δφ=8πSΩλc,{\displaystyle \Delta \varphi ={\frac {8\pi S\Omega }{\lambda c}},}
где λ{\displaystyle \lambda } — длина волны.
Применение в технике
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром (маятником), так как из-за суточного вращения Земли и ухода гироскопа происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[18].
Системы стабилизации
Системы стабилизации бывают трех основных типов.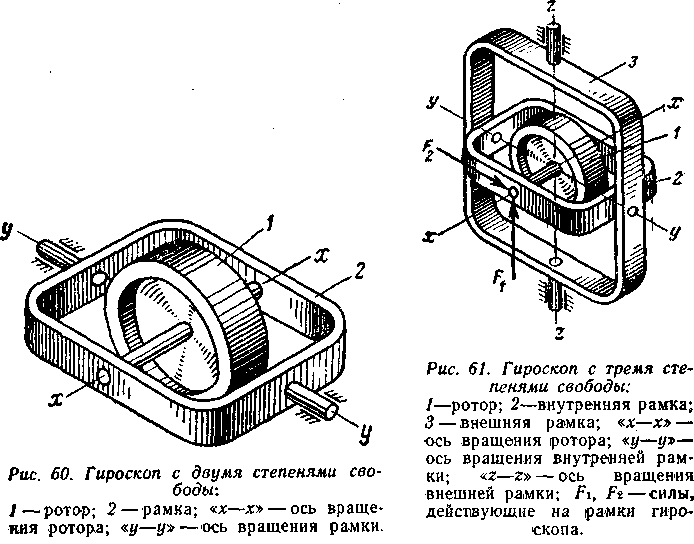
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопической навигации
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники.
Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические. Однако решение углового положения аппарата в пространстве с использованием СНС систем (многоантенных) хоть и возможно, но весьма затруднено и имеет ряд значимых ограничений, в отличие от гироскопических систем.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов.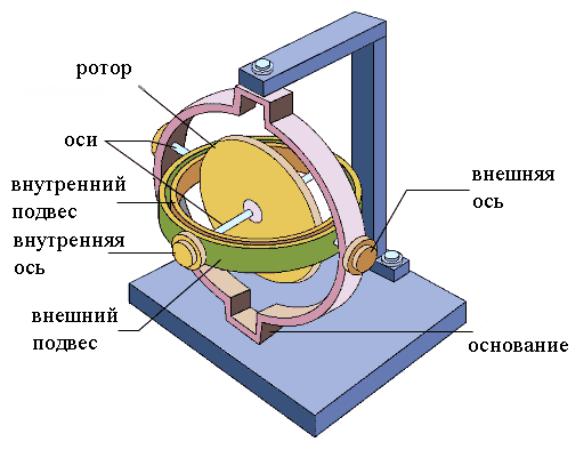 Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование в бытовой технике
Значительное удешевление производства МЭМС-датчиков привело к тому, что они все чаще используются в смартфонах и игровых приставках.
Гироскопы применялись в контроллерах для игровых приставок: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii и в более поздних. Вместе с гироскопом в них установлен акселерометр.
Изначально единственным датчиком ориентации в смартфонах был трехосевой МЭМС-акселерометр, чувствительный лишь к ускорению. В состоянии относительного покоя он позволял приблизительно оценить направление вектора силы тяготения Земли (g). С 2010 года смартфоны стали дополнительно оснащаться трехосевым вибрационным МЭМС-гироскопом, одним из первых был iPhone 4. Иногда также устанавливается магнитометр (электронный компас), позволяющий компенсировать дрейф гироскопов. [19][11]
[19][11]
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла), спиннер (волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки).
Кроме того, существует спортивный гироскопический тренажёр.
Ряд радиоуправляемых вертолётов использует гироскоп.
Минимум три гироскопа нужны для полета мультикоптеров, в частности квадрокоптеров.
См. также
Гироскоп для «Востока»
К 100-летию Виктора Кузнецова, члена совета главных конструкторов.
21 августа 1971 г. в книге отзывов Государственного музея истории космонавтики имени К.Э.Циолковского один из посетителей оставил запись: «С гордостью за советских людей осмотрел музей Циолковского. Хорошо, что в нем собрано много подлинных экспонатов. Желаю работникам музея успехов в их благородном труде». Внизу подпись: «Академик, главный конструктор В. И.Кузнецов». К этому времени Виктор Иванович уже был академиком Академии наук СССР, членом-корреспондентом Академии артиллерийских наук, дважды Героем Социалистического Труда, лауреатом нескольких Государственных премий, лауреатом Ленинской премии.
И.Кузнецов». К этому времени Виктор Иванович уже был академиком Академии наук СССР, членом-корреспондентом Академии артиллерийских наук, дважды Героем Социалистического Труда, лауреатом нескольких Государственных премий, лауреатом Ленинской премии.
Родился Кузнецов 14 апреля 1913 г. в Москве. После окончания школы работал электромонтером на Боровичском комбинате огнеупоров «Красный керамик» – в те годы для поступления в вуз требовался трехлетний трудовой стаж. Поступил в Ленинградский индустриальный институт, ныне Санкт-Петербургский государственный политехнический университет. Учился он у ведущих ученых нашей страны: А. Иоффе, Л. Николаи, Б. Кудревича, Е. Лурье. Его однокурсниками были будущие знаменитости – атомщик Г.Флёров и конструктор танков и атомного оружия Н.Духов. При выборе специальности попал в новую группу «Динамика машин». Здесь состоялось его первое знакомство с гироскопической техникой.
Простейший гироскоп – всем известная детская игрушка волчок. В физике гироскопом называют твердое тело, быстро вращающееся вокруг одной из своих осей. Ось вращения гироскопа должна иметь возможность свободно поворачиваться в пространстве, для чего прибор закрепляют в так называемом кардановом подвесе. Основное свойство гироскопа с тремя степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первоначальное направление, например, на какую-нибудь звезду. Именно это свойство широко используется в навигационных приборах – гирокомпасе, гировертикали для стабилизации движения самолетов, морских судов, торпед, ракет, космических аппаратов.
Ось вращения гироскопа должна иметь возможность свободно поворачиваться в пространстве, для чего прибор закрепляют в так называемом кардановом подвесе. Основное свойство гироскопа с тремя степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первоначальное направление, например, на какую-нибудь звезду. Именно это свойство широко используется в навигационных приборах – гирокомпасе, гировертикали для стабилизации движения самолетов, морских судов, торпед, ракет, космических аппаратов.
Уже на преддипломной практике на ленинградском заводе-212 Виктор Кузнецов участвовал в разработке сложной гироскопической системы для корабельной артиллерии. В те времена гироскопы нужны были в первую очередь на флоте. Это и навигационные приборы, и приборы стабилизации для артиллерии. В заводской лаборатории в 1938 г. инженер-исследователь Кузнецов усовершенствовал приборы для пункта управления стрельбой на крейсере «Киров». Четыре года спустя за эту работу ему была присуждена Сталинская премия второй степени.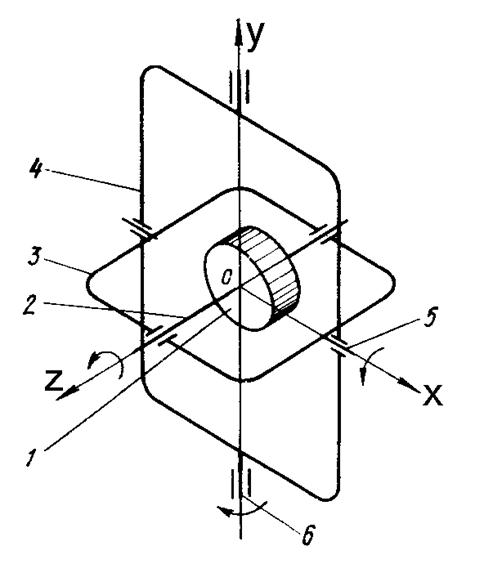 Однако в 30-х годах гироскопов в нашей стране серийно не производили, приходилось закупать американские или немецкие. Поэтому в октябре 1940 г. его с группой инженеров направили в Германию для приемки оборудования для флота.
Однако в 30-х годах гироскопов в нашей стране серийно не производили, приходилось закупать американские или немецкие. Поэтому в октябре 1940 г. его с группой инженеров направили в Германию для приемки оборудования для флота.
О дальнейших событиях Виктор Иванович скупо рассказал в автобиографии: «22 июня 1941 г. я вместе с работниками Торгпредства СССР был интернирован и попал в концентрационный лагерь, где пробыл десять дней, после чего в порядке обмена был возвращен через Турцию в СССР». Он не любил вспоминать пребывание в концлагере Бланкефельд и долгое возвращение домой.
В Москву он вернулся только в августе 1941 г. Уже началась эвакуация оборонных предприятий. Сотрудники московского НИИ-10, в котором в это время работал Кузнецов, были эвакуированы в Сталинград и Свердловск. В Свердловске продолжилась работа по созданию гироприборов для корабельной артиллерии. Кроме того, Кузнецов разрабатывал самолет, управляемый по радио, прицел для истребителя, управляемые танкетки. Новым направлением стало создание гироскопического стабилизатора для танковых пушек. После войны за эти работы Виктору Кузнецову была присвоена вторая Сталинская премия. В 1943 г. молодой ученый вывел условие устойчивости одноосного гироскопа, которое сегодня носит название «Условие Кузнецова».
Новым направлением стало создание гироскопического стабилизатора для танковых пушек. После войны за эти работы Виктору Кузнецову была присвоена вторая Сталинская премия. В 1943 г. молодой ученый вывел условие устойчивости одноосного гироскопа, которое сегодня носит название «Условие Кузнецова».
В апреле 1945 г. Кузнецова вновь направляют в Германию. Теперь уже целью командировки было изучение гироприборов, установленных на немецкой ракете А-4, известной всем нам как Фау-2. Здесь Кузнецов познакомился с Сергеем Павловичем Королёвым и другими ведущими конструкторами нашей страны. С этого времени Виктор Кузнецов начал работать в области ракетной техники.
Вскоре его включают в инженерную элиту страны, в совет главных конструкторов. Когда закладывались основы ракетно-космической отрасли, вставали невиданные вопросы и задачи. Работа требовала широкой кооперации, быстрого принятия решений, преодоления межведомственных барьеров. Королев предложил своим единомышленникам, главным конструкторам различных министерств, создать совет для решения самых разных вопросов в рабочем порядке.
В совет главных вошли главный конструктор ракетных систем С.Королев, главный конструктор двигательных установок В.Глушко, главный конструктор радиотехнических систем М.Рязанский, главный конструктор автономных систем управления Н.Пилюгин, главный конструктор гироскопических командных приборов В.Кузнецов, главный конструктор наземного оборудования В.Бармин, главный конструктор телеметрических систем А.Богомолов. Авторитет этой неформальной структуры был столь высок, что его рекомендации безропотно выполняли министры и директора предприятий космического профиля.
Ни одна из крупных вех отечественного ракетостроения, а позже космонавтики не обходилась без систем Кузнецова. Его приборы стояли на ракетах Р-1, Р-2, Р-5, Р-7, Р-16, УР-100, ракете-носителе «Спутник». Его приборами были оснащены гагаринский «Восток», космические корабли «Союз», орбитальные станции «Салют», базовый блок орбитального комплекса «Мир».
Когда встала задача оснастить гироскопическими системами межпланетные автоматические станции, ученый разработал уникальную приборную платформу массой всего в 5 кг. Она обеспечила мягкую посадку на Луну станций «Луна-16» и «Луна-17», а также доставку на землю образцов лунного грунта.
Она обеспечила мягкую посадку на Луну станций «Луна-16» и «Луна-17», а также доставку на землю образцов лунного грунта.
В.Кузнецов стал не только ведущим конструктором ракетно-космической техники, но и крупным организатором отечественного приборостроения. По его инициативе был построен Саратовский машиностроительный завод, уникальные заводы в Осташкове, Омске, Томске, Красноярске, Бердске, Миассе. Внедряя передовые технологии на крупных предприятиях в Раменском, Киеве, Перми, Ижевске, ученый месяцами пребывал в командировках.
Однако ответственные посты и высокие правительственные награды не мешали ученому оставаться чрезвычайно скромным человеком. По словам близко знавших его людей, он начинал работу в новом институте со слов «Склок и интриг у нас не будет». Этого принципа он придерживался всю жизнь.
До самой смерти в 1991 г. Виктор Иванович Кузнецов оставался главным конструктором созданного по его инициативе еще в 1956 г. Научно-исследовательского института гироскопических приборов, позже НИИ прикладной механики. После смерти ученого часть его архива семья передала в наш музей. В коллекцию входят личные вещи, фотографии, документы. Столетие со дня рождения одного из членов совета главных конструкторов, соратника Королева, ученого, возглавлявшего целую отрасль, – весомый аргумент для организации выставки, посвященной этому человеку. Она открылась в стенах нашего музея 10 апреля, в преддверии Всемирного дня авиации и космонавтики. Среди посетителей выставки хотелось бы видеть не только взрослых, но и детей – с помощью простых и остроумных игрушек они узнают, что такое гироскоп.
После смерти ученого часть его архива семья передала в наш музей. В коллекцию входят личные вещи, фотографии, документы. Столетие со дня рождения одного из членов совета главных конструкторов, соратника Королева, ученого, возглавлявшего целую отрасль, – весомый аргумент для организации выставки, посвященной этому человеку. Она открылась в стенах нашего музея 10 апреля, в преддверии Всемирного дня авиации и космонавтики. Среди посетителей выставки хотелось бы видеть не только взрослых, но и детей – с помощью простых и остроумных игрушек они узнают, что такое гироскоп.
Игорь Левашов, зав.сектором Государственного музея истории космонавтики им. К.Э.Циолковского.
Легкий рецепт домашнего гироскопического мяса
Easy Homemade Gyro Meat – это пикантное и травяное сочетание фарша из баранины и говяжьего фарша с отчетливо средиземноморским / ближневосточным вкусовым профилем. Моя, конечно же, американизированная версия этого восхитительного блюда, в котором используются ингредиенты, доступные мне.
При всем том, что происходит в мире, нелегко просто выйти и насладиться нашими любимыми ресторанными блюдами. Теперь вы можете наслаждаться им прямо у себя дома.Я думаю, вы найдете это восхитительным намеком на классический рецепт гироскопа, и вам не нужно ждать, пока вы сможете посетить свой любимый греческий ресторан, чтобы насладиться этим восхитительным бутербродом!
На Средиземноморье и Ближнем Востоке эту ароматную мясную смесь традиционно формовали в виде плотно упакованного конуса вокруг вертикального вертела и жарили на дровах.
Если вы когда-нибудь ели гироскоп на летней ярмарке, возможно, вы видели современный вертикальный гриль, вращающий и жарящий мясо гироскопа.Вертикальный вертел позволяет образовывать хрустящую карамелизацию на внешней стороне конуса мяса. Мясо срезается с конуса очень тонкими ломтиками, чтобы сделать бутерброды, а гриль продолжает вращаться, добавляя новый слой карамелизации.
У меня определенно нет вертикального гриля или вертела над открытым огнем, но я придумал, как превратить этот вкус рецепта гироскопа, который так желанен, в формулу, которую мы можем приготовить дома.
Гиро-бутерброды обычно готовятся на лаваше с дольками помидоров, дольками лука и сливочным соусом цацики.В нашей семье тоже любят добавлять салат. При приготовлении этого рецепта гироскопа мы с одинаковым успехом использовали лепешки из лаваша, а также карманные питы.
Переработка моего простого рецепта домашнего гироскопического мяса напомнила мне, как я люблю вкусные бутерброды с гироскопом. Это сытное и ароматное блюдо, которое можно держать в руке. Надеюсь, вам и вашей семье понравится возможность сделать свой дом своим!
Там должны быть Цацики
Соус цацики почти так же важен для гироскопа, как и мясо.Рецепт этого крутого огуречно-йогуртового соуса очень прост. Я включу его в раздел «Примечания» на этой карточке с рецептами, но если вы хотите узнать подробности о том, как его приготовить, посетите мою страницу рецептов Цацики .
Как приготовить домашнее мясо гироскопа
Поместите все ингредиенты в кухонный комбайн. Пульсируйте, пока все не начнет сходиться, а затем вы можете переключиться на высокий.
Пульсируйте, пока все не начнет сходиться, а затем вы можете переключиться на высокий.
High Speed полностью расщепляет белки в мясе и включает в себя все ингредиенты.Я знаю, что это кажется нелогичным, но мясо больше похоже на пасту, чем на фарш. Тогда вы поймете, что правы.
Выдавить мясную смесь в форму для выпечки хлеба. Я использовал форму для хлеба * 8 “x4” , но вы можете использовать то, что есть под рукой. Только учтите, что вам может потребоваться скорректировать время приготовления. Моя сковорода была заполнена доверху. Если у вас меньше сытости, возможно, вы захотите начать проверять степень готовности мяса раньше.
Плотно прижмите мясную смесь к сковороде.Вы хотите создать плотное готовое изделие без множества воздушных карманов.
Разогрейте духовку до 350 ° и выпекайте буханку 45-60 минут. Начните тестирование на отметке 45 минут. Вытащите его, когда внутренняя температура достигнет 160 °. Убедитесь, что термометр для мяса вставлен в центр хлеба, а не на дно формы. Поставьте сковороду на решетку для охлаждения и дайте ей постоять 15-20 минут.
Поставьте сковороду на решетку для охлаждения и дайте ей постоять 15-20 минут.
В кастрюле будет много капель.Обычно я их выбрасываю, но некоторые сохраняют их, чтобы добавить к мясу, когда они разогревают тонкие ломтики.
Нарезка домашнего гироскопа
О нарезке буханки гироскопа. Одна из самых примечательных особенностей мяса гироскопа – это то, что ломтики очень тонкие. Повара и поставщики гироскопов срезают мясо с приготовленного на вертеле конуса большими ножами. Это почти процесс бритья. Мы запекли мясо как буханку, поэтому процесс намного проще.
Охладите мясо перед нарезкой для достижения наилучших результатов.Если вы хотите сразу подать его, то определенно можете нарезать его теплыми ломтиками. Однако могут возникнуть проблемы с крошением.
Если вы сначала охлаждаете мясо, снимите кусок мяса со сковороды и поставьте его на решетку для охлаждения, чтобы он нагрелся до комнатной температуры. Нарежьте его на этом месте или заверните целиком и поставьте в холодильник. Затем нарежьте его, когда будете готовы подавать. Сделайте ломтики очень тонкими. Вы хотите дюйма или тоньше.
Затем нарежьте его, когда будете готовы подавать. Сделайте ломтики очень тонкими. Вы хотите дюйма или тоньше.
Чтобы использовать тонко нарезанный гироскоп для бутербродов, я люблю налить около 1 чайной ложки масла или сливочного масла на дно чугунной сковороды и нагреть на среднем или сильном огне.Добавьте тонкие ломтики мяса в горячую сковороду одним слоем, чтобы они прогрелись и получили ту фирменную карамелизацию, которая делает эти бутерброды такими вкусными. Это должно занять около 30 секунд на каждую сторону, так как мясо нарезается очень тонко.
Соберите бутерброды в ресторанном стиле: выложите теплые кусочки мяса, нарезанный сырой лук, нарезанные помидоры, салат и соус цацики на теплые лепешки из лаваша. Сложите пополам (как тако) и наслаждайтесь. Я также успешно сделал гироскопы внутри карманного лаваша.Используйте тот, который вы легко найдете в вашем районе.
Наслаждайтесь этим восхитительным рецептом гироскопа!
Распечатать часы значок часов- 1 фунт постного говяжьего фарша
- Фарш из баранины 1 фунт
- 1 средняя луковица, очищенная и нарезанная на четвертинки
- 2 столовые ложки измельченного чеснока
- 1 столовая ложка сушеного орегано
- 1 столовая ложка сушеного тимьяна
- 1 чайная ложка сушеного розмарина
- 2 ½ чайных ложки молотого тмина
- 2 чайные ложки соли
- 2 чайные ложки черного молотого перца
 border-color secondary-color.background-color”/>
border-color secondary-color.background-color”/>- Духовку разогреть до 350 °.
- Поместите все ингредиенты в кухонный комбайн.
- Пульсируйте, пока все не начнет сходиться, а затем вы можете переключиться на высокий.
- Я знаю, что это кажется нелогичным, но вы хотите, чтобы все было включено и белки в мясе были расщеплены. Когда мясо будет готово, оно должно больше походить на пасту, чем на фарш.
- Выдавить мясную смесь в форму для выпечки хлеба. Я использовал размер 8 «x4», но вы можете использовать то, что есть под рукой. Только учтите, что вам может потребоваться скорректировать время приготовления.Моя сковорода была заполнена доверху. Если у вас меньше сытости, возможно, вы захотите начать проверять степень готовности мяса раньше.
- Очень плотно прижмите мясо к сковороде. Вы хотите создать плотное готовое изделие без множества воздушных карманов.
- Выпекать при 350 ° 45-60 минут. Начните тестирование на отметке 45 минут.
 Вытяните его, когда термометр для мяса, вставленный в центр, достигнет 160 °. Поставьте сковороду на решетку для охлаждения и дайте ей постоять 15-20 минут.
Вытяните его, когда термометр для мяса, вставленный в центр, достигнет 160 °. Поставьте сковороду на решетку для охлаждения и дайте ей постоять 15-20 минут. - В кастрюле будет много капель.Обычно я их выбрасываю, но некоторые сохраняют их, чтобы добавить к мясу, когда они разогревают тонкие ломтики.
- О нарезке мяса гироскопа. Одна из самых примечательных особенностей мяса гироскопа – это то, что оно нарезано очень тонкими ломтиками. Это намного легче сделать, когда мясо остынет. Если вы хотите сразу подать его, то определенно можете нарезать его теплыми ломтиками. Однако процесс становится проще после того, как мясо остынет. Если сначала нужно охладить мясо, снимите кусок мяса с гироскопа со сковороды и поставьте его на решетку для охлаждения, чтобы он нагрелся до комнатной температуры.Нарежьте его на этом месте или заверните целиком, охладите и нарежьте, когда будете готовы подавать. Сделайте ломтики очень тонкими. Вы хотите дюйма или тоньше.
- Чтобы использовать тонко нарезанное мясо гироскопа для бутербродов с гироскопом, я люблю налить около 1 чайной ложки масла или сливочного масла на дно чугунной сковороды и нагреть его на среднем или сильном огне.
 Добавьте тонкие ломтики мяса гироскопа в горячую сковороду, чтобы прогреть их и получить ту фирменную карамелизацию, которая делает эти бутерброды такими вкусными.Это должно занять около 30 секунд на каждую сторону, так как мясо нарезается очень тонко.
Добавьте тонкие ломтики мяса гироскопа в горячую сковороду, чтобы прогреть их и получить ту фирменную карамелизацию, которая делает эти бутерброды такими вкусными.Это должно занять около 30 секунд на каждую сторону, так как мясо нарезается очень тонко. - Соберите бутерброды: выложите теплые кусочки мяса, нарезанный сырой лук, нарезанные помидоры, салат и соус цацики на теплые лепешки из лаваша. Сложите пополам (как тако) и наслаждайтесь. Я также успешно сделал гироскопы внутри карманного лаваша. Используйте тот, который вы легко найдете в вашем районе.
Банкноты
Домашний соус цацики
Состав
- ½ стакана мелко измельченного огурца
- 1 чашка простого греческого йогурта (Если вы не хотите употреблять молочные продукты, попробуйте кокосовый йогурт.
Просто он должен быть толстым.)
- 2 чайные ложки лимонного сока
- 1 столовая ложка сушеного укропа
- 1 чайная ложка измельченного чеснока или ½ чайной ложки чесночного порошка
- Соль и перец по вкусу
- Время приготовления: 10 минут
- Время приготовления: 50 минут
- Категория: Мясо, Говядина, Баранина, Основное блюдо
- Способ: запекание
- Кухня: Средиземноморская американская
Другие способы подать домашнее гироскопическое мясо
Гироскопические бутерброды – не единственный вкусный вариант для приготовления домашнего гироскопического мяса.
Гироскоп Кесадилья- Easy and Delicious Gyro Quesadillas – публикация скоро будет
- Lunch in a Hurry Gyro Meat Пицца для лепешек – Выложите домашнее гироскопическое мясо, нарезанный лук и сыр моцарелла на лепешки из лаваша.
 Я запекаю пиццу при 425 °, пока лепешки не станут горячими и хрустящими, а сыр не расплавится. Посыпать мелко нарезанными помидорами и огурцами. Полить соусом дзадзики.
Я запекаю пиццу при 425 °, пока лепешки не станут горячими и хрустящими, а сыр не расплавится. Посыпать мелко нарезанными помидорами и огурцами. Полить соусом дзадзики. - Gyro Salad – приготовьте салат из вашего любимого гироскопа и ингредиентов греческого салата.Добавьте немного оливкового масла и красного винного уксуса в соус цацики, чтобы создать ароматную средиземноморскую заправку для салата.
- Сэндвичи с сыром на гриле с гироскопом – Используйте свой любимый сыр и домашнее мясо с гироскопом для создания сэндвичей с сыром на гриле. Добавьте немного соуса для барбекю к мясу и сыру, а затем запекайте на гриле, как обычно.
- Gyro Pasta Dinner – перемешайте нарезанное мясо гироскопа, нарезанные кубиками помидоры, огурцы и лук с вашей любимой приготовленной пастой.Сбрызнуть оливковым маслом или топленым маслом и небольшим количеством цацики. Посыпать пармезаном.
Если вам понравился этот рецепт, вы можете попробовать:
Великолепное тушеное мясо с фрикадельками
Гамбургер Лёгкий Строганов
Горячие бутерброды с говядиной
Представляем Food XRAY.
 Самое простое и мощное питание… | Ананд Шарма
Самое простое и мощное питание… | Ананд ШармаПервое, что вы увидите под калориями и макросами, – это качество еды.При этом учитывается все, от количества белка до того, насколько обработана пища или насколько она насыщена важными витаминами и минералами.
Низкая оценка, такая как D или F, не означает, что вы никогда не можете что-то есть, а скорее то, что это то, что вам следует есть только изредка. Жизнь и хорошее здоровье – это поиск этого баланса. Оценка также дает дополнительные советы о том, как часто что-то повторять, чтобы вы могли полностью понять влияние каждого приема пищи и как часто вы должны их есть.
Например, есть торт на день рождения – это здорово, но есть его после каждого приема пищи, вероятно, нецелесообразно. Также важно сбалансировать его с полноценным приемом пищи, например, употребление пирога самостоятельно или после сбалансированного приема пищи может по-разному повлиять на уровень глюкозы. Основанный на многолетнем опыте настоящих тренеров-людей, тренер по метаболизму понимает все эти различия и дает вам правильный контекст и рекомендации, чтобы принимать правильные решения!
Energy Balance
Удерживает ли ваша еда дефицит калорий, чтобы облегчить потерю жира, или это сбивает вас с толку? Возможно, вы наращиваете мышечную массу и хотите небольшого излишка. Ни «хороший», ни «плохой», а скорее важные инструменты, которые вы можете использовать для управления своим телом, и о которых важно знать.
Ни «хороший», ни «плохой», а скорее важные инструменты, которые вы можете использовать для управления своим телом, и о которых важно знать.
Следите за своим балансом калорий с помощью измерителя баланса энергии, чтобы понять, следует ли увеличивать или уменьшать размеры порций или приемов пищи.
В то время как баланс калорий привлекает наибольшее внимание, есть многие других факторов в еде, которые необходимо проанализировать. Существуют тысячи других приложений, которые также могут отслеживать ваши калории, но Food XRAY с реальными людьми позволяет вам измерять все другие не менее важные переменные.
Пищевая промышленность
Когда дело доходит до обработанных пищевых продуктов, существует широкий спектр продуктов, но наш прибор для обработки пищевых продуктов будет держать все в порядке. Целью игры должны быть по возможности цельные продукты. Больше питательных веществ и без добавок, консервантов или неприятных вещей, таких как трансжиры. Просто еда, как и положено.
Muscle Protein
Сохраняет ли ваша еда или наращивает мышечную ткань? Синтез мышечного белка (MPS) – это метаболический процесс белка и определенных аминокислот, таких как лейцин, используемых для роста и восстановления мышечной ткани.Если вы пытаетесь сбросить жир, вам нужно, чтобы этот глюкометр сохранил мышцы. Если вы наращиваете мышцы, вам нужно стимулировать MPS для достижения оптимального результата!
Плотность питательных веществ
Витамины, минералы и фитонутриенты (питательные вещества из продуктов растительного происхождения). Получайте удовольствие, наблюдая, как часто вы можете поддерживать эти три важнейшие планки как можно полнее и при этом становиться здоровее и здоровее.
Hunger & Satiety
Многие ферменты и гормоны играют важную роль, когда дело доходит до голода и насыщения, но в современной жизни стало трудно поддерживать связь с нашими системами, как когда-то.Измеритель голода или сытости покажет вам, насколько насыщенной была еда, чтобы вы могли правильно питать свое тело и не чувствовать постоянного голода.
Мы часто принимаем психологические триггеры за голод, еду, когда нам это не нужно, например, когда нам скучно или в стрессе, или еду продуктов, которые вызывают скачки сахара в крови и сбои, вызывающие ложное чувство голода. И цикл продолжается. Для получения дополнительной информации ознакомьтесь с полным руководством по Голоду.
Стабильность глюкозы
Мы потратили много времени на тестирование всех новейших мониторов глюкозы.Отслеживание уровня глюкозы было в первой версии Gyroscope X, которую мы выпустили много лет назад, но оказалось, что у большинства людей нет времени, энергии или бюджета, чтобы ежедневно отслеживать уровень глюкозы. Большинство людей просто хотят, чтобы их тренер сказал им, какой прием пищи лучше всего.
Хотя есть небольшие различия в зависимости от человека – на него влияют многие переменные, такие как мышечная масса, чувствительность к инсулину, оценка здоровья, время и даже уровни стресса – передовые методы и окончательные выводы были очень похожи для всех.
Теперь вы можете перейти к самой сути и отметить, какие приемы пищи могут больше всего дестабилизировать уровень глюкозы. Это актуально, потому что высокий уровень сахара в крови может привести к усилению голода и снижению энергии в течение дня (или, в конечном итоге, даже к инсулинорезистентности и диабету). На это влияет весь состав и даже время приема пищи, а не только один ингредиент, хороший или плохой.
Вы по-прежнему можете использовать свой любимый монитор глюкозы с гироскопом (и кетонами тоже) для еще большей точности и понимания.График уровня сахара в крови будет отображаться в вашем ежедневном отчете рядом с продуктами. Для всех остальных эти идеи сэкономят вам сотни или тысячи долларов, которые придется потратить на то, чтобы сделать это самостоятельно, сделав здоровье обмена веществ доступным для всех – не только для сверхбогатых.
Гироскопическая инерция – обзор
2 Снаряды с двойным вращением и связанные с ними технологии
В этом разделе объясняется, почему стабилизация вращения полезна для снарядов, а также некоторые проблемы, которые могут возникнуть после ее внедрения.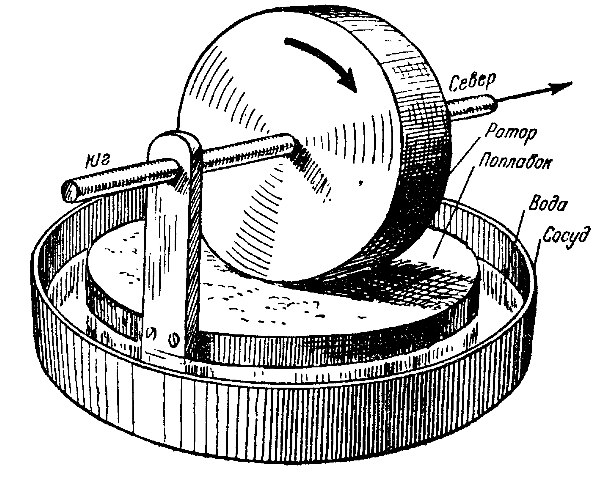 Управляемые снаряды представлены вместе с обоснованием конфигурации двойного вращения. Наконец, представлены соответствующие технологии, такие как MEMS, пьезоэлектрические приводы и новые методы передачи управляющего момента.
Управляемые снаряды представлены вместе с обоснованием конфигурации двойного вращения. Наконец, представлены соответствующие технологии, такие как MEMS, пьезоэлектрические приводы и новые методы передачи управляющего момента.
Снаряд, как эффектор, использовался в войне почти все время, пока существовала война. Давно известно, что вращение снаряда улучшает стабильность, и, начиная с формулы Гринхилла [1], существует оптимальная скорость вращения. Слишком малое вращение, и снаряд не будет обладать гироскопической инерцией, чтобы противостоять возмущающей силе, возникающей во время полета, и прецессия будет слишком большой.Слишком большое вращение и гироскопическая инерция будут сопротивляться выравнивающим аэродинамическим силам от аэродинамической конструкции, создавая слишком большой угол атаки; известна как сверхстабильность [2]. Баллистическая устойчивость, как это понимается сегодня, определяется как способность снаряда сохранять свою траекторию, обеспечивая достижение желаемой дальности и заданного уровня точности. Баллистически нестабильный снаряд будет падать во время полета, что отрицательно скажется на аэродинамике и, следовательно, на дальности и точности.Следовательно, вращение снаряда направлено на устранение несоответствий и неточностей, вызванных этими нарушениями.
Баллистически нестабильный снаряд будет падать во время полета, что отрицательно скажется на аэродинамике и, следовательно, на дальности и точности.Следовательно, вращение снаряда направлено на устранение несоответствий и неточностей, вызванных этими нарушениями.
Однако есть два заметных случая усиленной нестабильности при вращении снарядов. Резонанс спин-рыскания возникает, когда скорость вращения приближается к скорости рыскания, снаряд может начать совершать рыскание с большой амплитудой, называемое «лунным» рысканием [2]. Катастрофическое рыскание происходит, когда большое рыскание усиливается нелинейными эффектами Магнуса, что создает дополнительную динамическую нестабильность, приводящую к каскадному эффекту.Действительно, силовые взаимодействия Магнуса по-разному влияют на полет снаряда, Зейферт [3] представил всесторонний обзор эффекта Магнуса и его значения в аэронавтике. В другом соответствующем исследовании [4] CFD-моделирование использовалось для прогнозирования аэродинамических коэффициентов и полей потока для 25-мм снаряда со стабилизированным вращением. Цель состоит в том, чтобы определить, какие параметры необходимы для точного расчета момента Магнуса и момента демпфирования крена. Хотя вращающиеся снаряды подвержены действию сил Магнуса в полете, их можно надежно учесть до запуска снаряда [5].
Цель состоит в том, чтобы определить, какие параметры необходимы для точного расчета момента Магнуса и момента демпфирования крена. Хотя вращающиеся снаряды подвержены действию сил Магнуса в полете, их можно надежно учесть до запуска снаряда [5].
Точность, требуемая современным вооружением, привела к разработке управляемого оружия, в котором средства управления и наведения встроены непосредственно в снаряд. Управляемое оружие обеспечивает существенные преимущества по сравнению с обычными боеприпасами, а именно снижение сопутствующего ущерба, повышенную летальность и эффективность на единицу. Обычные, не вращающиеся, управляемые боеприпасы уже хорошо зарекомендовали себя в современных арсеналах (например, M982 Excalibur [6], M712 Copperhead [7]), в основном с использованием управляющих поверхностей, таких как утки для управления.Однако высокая частота вращения, присущая стабилизации вращения, не способствует использованию датчиков слежения или оборудования наведения. Относительно недавним решением этой проблемы является использование конфигурации «двойного вращения», показанной на рис. 1. Кормовая секция снаряда сохраняет свою высокую скорость вращения и врожденную гироскопическую устойчивость, в то время как секция предисловия, украшенная системой наведения и управления аппаратное обеспечение, имеет гораздо более низкую скорость отжима. Эта конструкция позволяет управлять вращающимися снарядами в тех случаях, когда уменьшение вращения является вредным или нежелательным по другим причинам, примером этого могут быть меньшие калибры, которые более восприимчивы к аэродинамическим возмущениям.Если существуют запасы неуправляемых боеприпасов со стабилизированным вращением, они могут быть обновлены путем замены существующего взрывателя на взрыватель коррекции курса (CCF), который содержит оборудование управления и наведения [8].
1. Кормовая секция снаряда сохраняет свою высокую скорость вращения и врожденную гироскопическую устойчивость, в то время как секция предисловия, украшенная системой наведения и управления аппаратное обеспечение, имеет гораздо более низкую скорость отжима. Эта конструкция позволяет управлять вращающимися снарядами в тех случаях, когда уменьшение вращения является вредным или нежелательным по другим причинам, примером этого могут быть меньшие калибры, которые более восприимчивы к аэродинамическим возмущениям.Если существуют запасы неуправляемых боеприпасов со стабилизированным вращением, они могут быть обновлены путем замены существующего взрывателя на взрыватель коррекции курса (CCF), который содержит оборудование управления и наведения [8].
Рис. 1. Изображение снаряда с двойным вращением (Лян и др. [57]).
Ограничение аппаратных средств управления и наведения таким небольшим объемом ведет к миниатюризации подсистем. В результате технологии перенимаются из других областей. Например, микроэлектромеханические системы (МЭМС) уже становятся более устойчивыми благодаря использованию в аэрокосмической отрасли [9].МЭМС описывают любую систему с движущимися частями в микромасштабе; соответствующими примерами, используемыми в управляемых снарядах, могут быть гироскопы и акселерометры. Кроме того, проводятся эксперименты по адаптации новых технологий, таких как пьезоэлектрические приводы, которые являются прочными, имеют очень высокие рабочие частоты и не имеют движущихся частей (за исключением физической деформации привода). Различные конструкции пьезоэлектрических исполнительных механизмов, такие как биморфные исполнительные механизмы [10,11] и исполнительные механизмы с защелкиванием [12], были включены в плавники снарядов, и были рассмотрены методы управления [13,14].Меньшие конструкции обычно соответствуют более высокой скорости снаряда [15]. Как численно, так и экспериментально было показано, что обычные конструкции плавников способны производить значительные отклонения при воздействии на сверхзвуковые скорости, превышающие 4 Маха [16] (25-миллиметровый снаряд достиг отклонения 1,4 м на расстоянии 160 м).
Например, микроэлектромеханические системы (МЭМС) уже становятся более устойчивыми благодаря использованию в аэрокосмической отрасли [9].МЭМС описывают любую систему с движущимися частями в микромасштабе; соответствующими примерами, используемыми в управляемых снарядах, могут быть гироскопы и акселерометры. Кроме того, проводятся эксперименты по адаптации новых технологий, таких как пьезоэлектрические приводы, которые являются прочными, имеют очень высокие рабочие частоты и не имеют движущихся частей (за исключением физической деформации привода). Различные конструкции пьезоэлектрических исполнительных механизмов, такие как биморфные исполнительные механизмы [10,11] и исполнительные механизмы с защелкиванием [12], были включены в плавники снарядов, и были рассмотрены методы управления [13,14].Меньшие конструкции обычно соответствуют более высокой скорости снаряда [15]. Как численно, так и экспериментально было показано, что обычные конструкции плавников способны производить значительные отклонения при воздействии на сверхзвуковые скорости, превышающие 4 Маха [16] (25-миллиметровый снаряд достиг отклонения 1,4 м на расстоянии 160 м).
Было проведено много исследований нетрадиционных методов контроля. Хотя плавники по-прежнему являются основным источником управляющих моментов для снарядов, разработки этих новых методов могут оказаться полезными в будущих конструкциях управляемого оружия, независимо от того, с двойным вращением или без него.В рамках проекта SCORPION, созданного в сотрудничестве между DARPA, Исследовательскими лабораториями армии США (USARL) и Технологическим институтом Джорджии, была исследована возможность использования микроадаптивного управления потоком (MAFC) как средства управления снарядами со стабилизированным вращением [17]. Он использовал эффект Коанды, взаимодействующий с боаттэйлом снаряда, в сочетании с высокочастотным пьезоэлектрическим приводом, который искажает боаттэйл. USARL также предложил и проанализировал асимметричный снаряд со стабилизированным вращением, управляемый одним плавником или «лопастью» [18].Доказано, что “хвостовые интерцепторы” способны маневрировать 105-мм снарядом на скорости до 3 Маха [19] с увеличением дальности на 7% или управляемым отклонением на 1,5 км в диапазоне 10 км.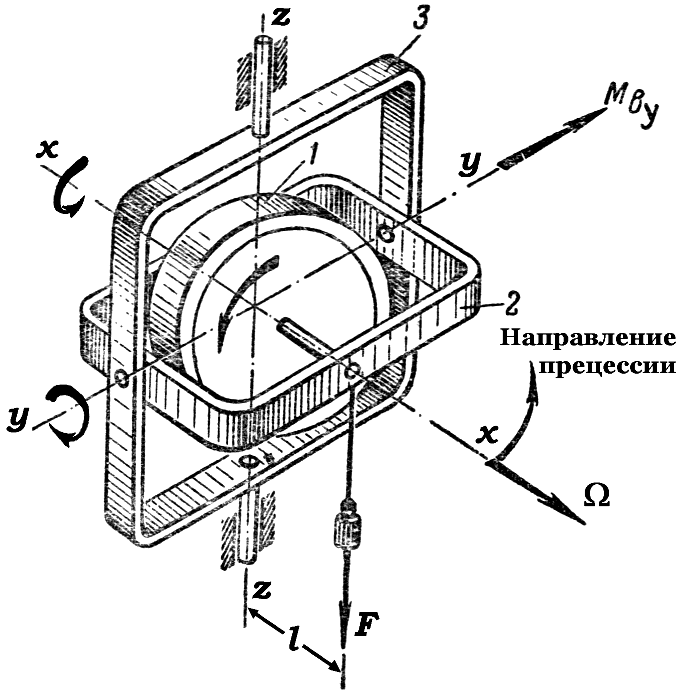 Испытания проводились с шарнирным носом / животом, достигая полосы пропускания до 200 Гц при 3,3 Маха [15]. Микровинт были исследованы как метод управления потоком сверхзвукового вращающегося снаряда [20]. Было обнаружено, что лопатки препятствуют отрыву потока на поверхности снаряда, стабилизируются коэффициент нормальной силы и момент тангажа, что приводит к большей устойчивости снаряда за счет уменьшения колебаний.Кроме того, существует множество патентов [21–25], описывающих новые методы наведения, такие как воздушные форсунки, гироскопы и асимметричные огивы. Поскольку методы управления плавниками настолько преобладают, в данной статье предполагается, что они являются источником всех управляющих моментов.
Испытания проводились с шарнирным носом / животом, достигая полосы пропускания до 200 Гц при 3,3 Маха [15]. Микровинт были исследованы как метод управления потоком сверхзвукового вращающегося снаряда [20]. Было обнаружено, что лопатки препятствуют отрыву потока на поверхности снаряда, стабилизируются коэффициент нормальной силы и момент тангажа, что приводит к большей устойчивости снаряда за счет уменьшения колебаний.Кроме того, существует множество патентов [21–25], описывающих новые методы наведения, такие как воздушные форсунки, гироскопы и асимметричные огивы. Поскольку методы управления плавниками настолько преобладают, в данной статье предполагается, что они являются источником всех управляющих моментов.
Проектирование МЭМС-гироскопов для производства
Техническое задание
Успешные конструкторы МЭМС осознают важность дизайна для производства и понимают, что критически важно выполнять моделирование, которое может точно уловить производственные вариации. Следовательно, критически важно выполнять моделирование, которое может точно фиксировать производственные вариации.
Следовательно, критически важно выполнять моделирование, которое может точно фиксировать производственные вариации.
Современные конструкции гироскопов MEMS в высшей степени оптимизированы и поэтому являются особенно хорошим примером устройства, которое необходимо тщательно оптимизировать не только по характеристикам, но и по нечувствительности к производственным изменениям. Эффективное моделирование различных вариантов конструкции имеет решающее значение для успеха группы разработчиков гироскопов.
Рис. 1. Типы изменчивости производства, реализованные на примере COMSOL.Эти вариации обычно встречаются при проектировании устройств MEMS.Самое простое решение
Veryst разработал метод быстрого цикла изготовления различных вариантов гироскопа MEMS с использованием COMSOL Multiphysics.
Мы создали аналитические уравнения, позволяющие рассчитывать электростатические силы и емкости исполнительных механизмов на основе расстояния между элементами модели, используя общий оператор экструзии COMSOL.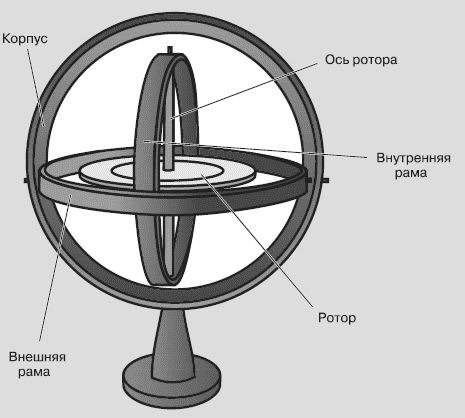 Такой подход масштабируется до сложных устройств с множеством гребенок.Мы использовали интерфейс деформированной геометрии COMSOL для точного моделирования влияния производственных дефектов на геометрию. Эта функция позволяет искажать сетку в соответствии с заданными пользователем уравнениями; измененная геометрия затем используется в структурном моделировании методом конечных элементов. С помощью этой функции разработчик может циклически перебирать варианты дизайна, используя одну и ту же сетку, и, следовательно, может получать информацию о влиянии вариаций дизайна, даже когда изменения в производительности могут быть трудно разрешить с помощью сетки.На рисунке 1 показаны некоторые из реализованных нами вариантов дизайна. Обратите внимание, что этот подход позволяет сочетать эти эффекты и / или функциональные вариации в самом устройстве.
Такой подход масштабируется до сложных устройств с множеством гребенок.Мы использовали интерфейс деформированной геометрии COMSOL для точного моделирования влияния производственных дефектов на геометрию. Эта функция позволяет искажать сетку в соответствии с заданными пользователем уравнениями; измененная геометрия затем используется в структурном моделировании методом конечных элементов. С помощью этой функции разработчик может циклически перебирать варианты дизайна, используя одну и ту же сетку, и, следовательно, может получать информацию о влиянии вариаций дизайна, даже когда изменения в производительности могут быть трудно разрешить с помощью сетки.На рисунке 1 показаны некоторые из реализованных нами вариантов дизайна. Обратите внимание, что этот подход позволяет сочетать эти эффекты и / или функциональные вариации в самом устройстве.
В целях иллюстрации мы разработали модель гироскопа, основанную на одном из первых успешных гироскопов MEMS от Draper Laboratories в Кембридже, Массачусетс [1]. Хотя это устройство намного меньше и проще, чем многие современные конструкции, оно демонстрирует методы моделирования, которые мы разработали для поддержки разработчиков МЭМС.
Хотя это устройство намного меньше и проще, чем многие современные конструкции, оно демонстрирует методы моделирования, которые мы разработали для поддержки разработчиков МЭМС.
Влияние производственных допусков на характеристики конструкции является значительным. Этот простой гироскоп имеет гребенчатые приводы, сконфигурированные для управления режимом в плоскости, как показано на Рисунке 2 (а). Силы Кориолиса, действующие на эту моду, возбуждают внеплоскостную моду, показанную на рисунке 2 (b), движение которой обнаруживается конденсаторами с параллельными пластинами под контрольными массами.
Рис. 2. Иллюстрация режимов движения и считывания гироскопа. На рисунке 3 показан эффект 0.Угол боковой стенки 5 ° при движении двух контрольных масс при отсутствии вращения – вертикальное смещение увеличено в 1000 раз на этой визуализации. Отклик гироскопа теперь содержит значительное движение вне плоскости из-за боковой стенки луча. Этот квадратурный отклик все еще почти на 90 ° не совпадает по фазе с сигналом из-за режима считывания, потому что сила Кориолиса пропорциональна скорости. Его величина соответствует скорости вращения 45 000 град / с. Даже синфазная часть управляющего сигнала, которая значительно меньше, соответствует 3900 град / с.В реальном гироскопе аналогичной конструкции используется контур фазовой автоподстройки частоты, чтобы рассматривать сигнал только в фазе с режимом считывания (в действительности режим Кориолиса не сдвинут по фазе на 90 ° по фазе с приводом из-за конечного разделения мод). Даже с такой системой проблема, связанная с производством наведенной квадратуры, является значительной.
Его величина соответствует скорости вращения 45 000 град / с. Даже синфазная часть управляющего сигнала, которая значительно меньше, соответствует 3900 град / с.В реальном гироскопе аналогичной конструкции используется контур фазовой автоподстройки частоты, чтобы рассматривать сигнал только в фазе с режимом считывания (в действительности режим Кориолиса не сдвинут по фазе на 90 ° по фазе с приводом из-за конечного разделения мод). Даже с такой системой проблема, связанная с производством наведенной квадратуры, является значительной.
Инструменты, созданные Veryst для быстрого моделирования различных производственных вариаций, позволяют разработчикам быстро получить точное представление о влиянии производственных вариаций на систему.
Еще один пример возможностей Veryst в этой области см. В нашем тематическом исследовании «Моделирование МЭМС-лидара».
Рис. 3. Иллюстрация отклика гироскопа в отсутствие вращения, но с углом боковой стенки 0,5 °, с вертикальной деформацией, увеличенной в 1000 раз. Цвета показывают величину смещения переменного тока в вертикальном направлении – амплитуда режима возбуждения составляет примерно 2,3 мкм.
Цвета показывают величину смещения переменного тока в вертикальном направлении – амплитуда режима возбуждения составляет примерно 2,3 мкм.Это тематическое исследование было разработано в рамках сотрудничества с COMSOL.Модели, созданные в рамках этого исследования, будут доступны в COMSOL Multiphysics версии 5.6 в качестве примеров библиотеки моделей: «Микромашинный гироскоп для регулировки скорости вилки с комбинированным приводом» и «Эффекты вариации производства в гироскопе для регулировки скорости вилки с комбинированным приводом с микромашинным приводом».
1. J. Bernstein, S. Cho, AT King, A. Kourepenis, P. Maciel и M. Weinberg, “Микромашинный гироскоп с камертонной вилкой с гребенчатым приводом”, [1993] Proceedings IEEE Micro Electro Mechanical Systems, Fort Лодердейл, Флорида, США, 1993, стр.143-148.
четыре раза
Демонстрация гироскопической прецессии
В начале своей лекции Лэйтуэйт использует викторианскую
гироскоп для демонстрации гироскопической прецессии. Прецессия
описывает изменение направления оси вращающегося объекта,
так что в этом случае изменение оси вращения гироскопа.
Прецессия
описывает изменение направления оси вращающегося объекта,
так что в этом случае изменение оси вращения гироскопа.
Лэйтуэйт вешает гири на викторианском гироскопе, чтобы продемонстрировать прецессию
Схема викторианского гироскопа
используется Лейтвейтом для демонстрации прецессии
Когда вес прибавляется к гироскопу (при вращении ротора) происходит гироскопическая прецессия. Эта прецессия в направлении перпендикулярно направлению действия силы веса. В происходящая прецессия показана на анимации слева который показывает вид сверху на гироскоп во время его прецессии (части в гироскоп, такой как база, для ясности опущены)
Почему делает прецессия происходит?
Вес, подвешенный к гироскопу (обозначен
крестик на схеме слева) смещен от центра масс
гироскоп и подставка.Именно это противодействие сил
вызывает прецессию.
Вид сбоку гироскопа, показывающий смещение сил Видно что до свесить гирю с гироскопа все силы действовали через одну и ту же точку (центр масс), там Прецессии в данном случае не было. Из б) это может быть видно, что все силы больше не действуют через одну и ту же точку и смещение на расстояние, d. Пара определяется как система сил с равнодействующим моментом, но не Равнодействующая сила.Следовательно, b) эквивалентно a) с моментом, Q также действующий, где
Вид сбоку на b) с
смещение сил, представленное в виде момента
It можно увидеть, что висит груз гироскопа в позиция, показанная в момент, была введена в систему.
Момент
импульса
из
ротор определяется как где C –
постоянная, заданная по принципу
момент
инерции относительно оси k. Из этой формулы видно
тот
направление вектора момента импульса совпадает с направлением
направление вращения ротора.
Использование информация, которая сила смещения может быть представлена как пара и направление вектора момента импульса параллельно к спину прецессирующий гироскоп также можно представить в виде ниже.
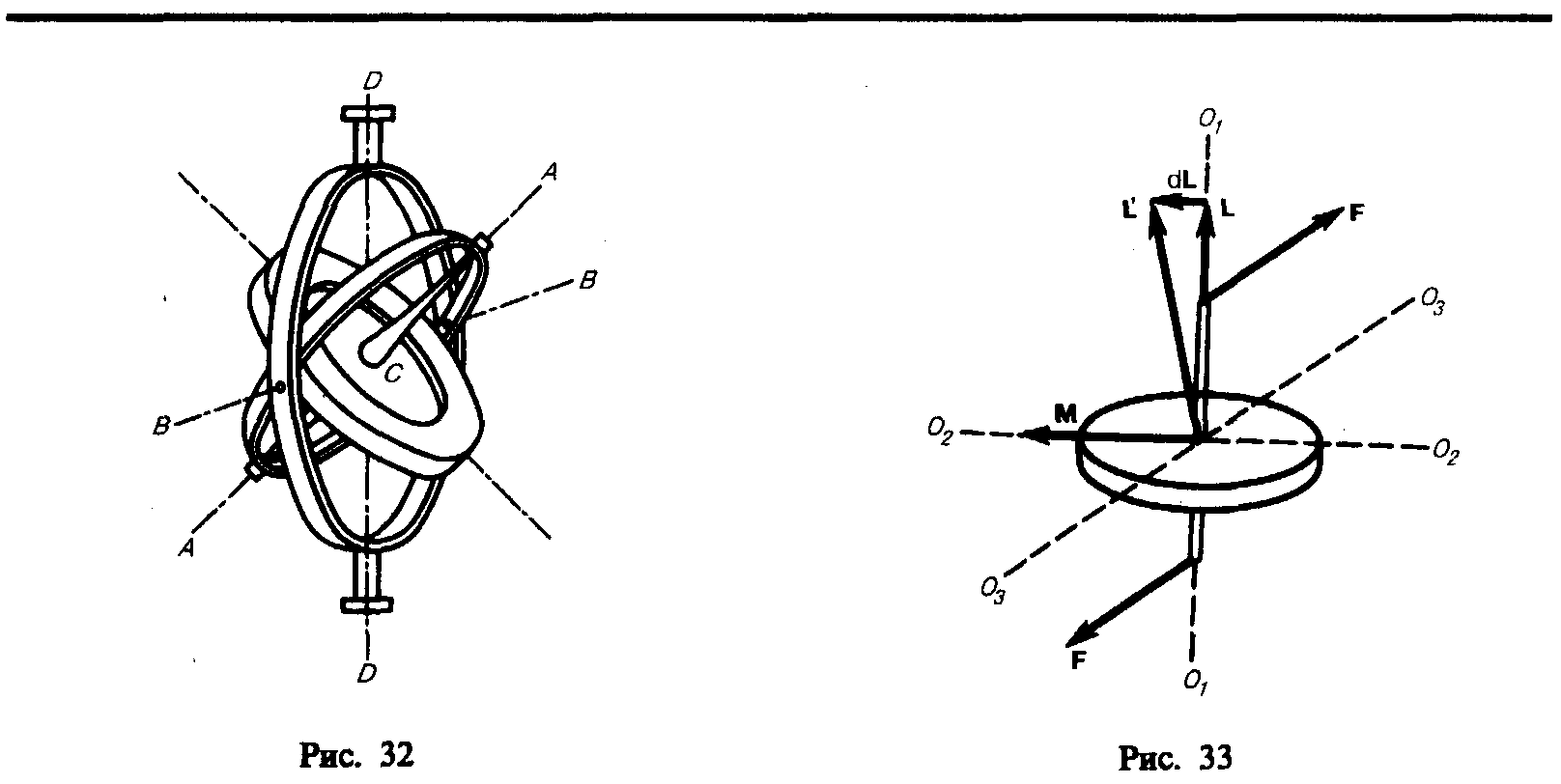
Гироскоп есть
установлен на подставке, поэтому центр ротора является
фиксированная точка, поэтому его можно упростить до
Этот результат является ключевым, вектор момента импульса, ч немного изменится в направлении Q (применяемый пара).
.
В направление пары и спиновых векторов может быть рассчитывается с использованием право правило ручного винта. Отсюда направление прецессии получается с использованием информации что момент количества движения и, следовательно, ось вращения изменяется в направление применяемой пары.
В
отсутствие
прецессии веса не было
был
из-за того, что не было приложенной пары Q и, следовательно, никаких изменений в
момент количества движения, другими словами, ось вращения оставалась неподвижной.
Прецессия из игрушечный гироскоп
Игрушечные гироскопы обеспечивают
хорошо
демонстрация прецессии.В
в данном случае пара не прикладывается, а получается пара.
тот факт, что центр масс гироскопа не выше точки
контакт, и поэтому сила веса и сила реакции уравновешиваются.
Игрушечные гироскопы легко завладеть большинство магазинов игрушек, так что это можно проверить и изменить направление вращения чтобы увидеть, что происходит с направлением прецессии.Момент вектор импульса, h всегда будет двигаться в направлении применяемый пара.
Демонстрации прецессии
Нутация
Другая нутация движения также может наблюдаться во время прецессии, то есть стационарное движение тел k оси вокруг оси K с постоянным углом между ними, это наблюдается как быстрое колебательное движение
Гироскоп на волнах де Бройля: сложные вещи простыми словами
Bohnenberger, J. G.F., Beschreibung einer Maschine zur Erläuterung der Geseze der Umdrehung der Erde um ihre Ax, und der Veränderung der Lage der letzteren, Tübinger Blätter für Naturwissenschaften und Arzneikunde, 18. 72–83. https://www.ion.org/ Museum / item_view.cfm? cid = 5 & scid = 12 & iid = 24. Цитировано 5 апреля 2021 г.
G.F., Beschreibung einer Maschine zur Erläuterung der Geseze der Umdrehung der Erde um ihre Ax, und der Veränderung der Lage der letzteren, Tübinger Blätter für Naturwissenschaften und Arzneikunde, 18. 72–83. https://www.ion.org/ Museum / item_view.cfm? cid = 5 & scid = 12 & iid = 24. Цитировано 5 апреля 2021 г.
The Machine of Bohnenberger, ION Virtual Museum. http://www.ion.org/museum/files/File_1.pdf. Цитировано 5 апреля 2021 г.
Bouyer, P., 100-летие эффекта Саньяка и его приложений: от электромагнитных к материальным волнам, Гироскопия и навигация , 2014, т. 5, вып. 1. С. 20–26.
Артикул Google Scholar
Мацек В. и Дэвис Д. Измерение скорости вращения кольцевыми лазерами бегущей волны, Applied Physics Letters , 1963, т. 2, вып. 3. С. 67–68.
Артикул Google Scholar
Вали, В.и Шортхилл Р. Интерферометр с волоконным кольцом, Applied Optics, , 1976, т. 15. С. 1099–1100.
Интерферометр с волоконным кольцом, Applied Optics, , 1976, т. 15. С. 1099–1100.
Артикул Google Scholar
Малыкин Г.Б. Эффект Саньяка: правильные и неправильные объяснения // Успехи физики. 43, нет. 12. С. 1229–1252.
MathSciNet Статья Google Scholar
де Бройль, Л., Исследования по теории квантов, Докторантура , Париж: Masson et Cie, 1924.
де Бройль Л., Ондес в квантах, C.R. Acad. Sci. , 1923, т. 177. С. 507–510.
Google Scholar
Пешехонов В.Г. Перспективы гироскопии, Гироскопия и навигация , 2020, т. 11, вып. 3. С. 193–197.
Артикул Google Scholar
Интерферометр Маха-Цендера, http://www.en.wikipedia.org/wiki/Mach-Zehnder_interferometer.Цитировано 20 апреля 2021 г.
Ландау Л.Д., Ахиезер А.И., Лифшиц Е.М., Курс общей физики. Механика и молекулярная физика, (Общая физика. Механика и молекулярная физика. Учебное пособие), М .: Наука, 1965.
Меткалф Х. Дж., Ван дер Стратен П. Лазерное охлаждение и захват нейтральных атомов, Оптика Энциклопедия: основы и практическое применение, 2007, https://doi.org/10.1002/9783527600441.oe005
Балыкин В.И., Атомная оптика и ее приложения, Вестник РАН , 2011, т. 81, нет. 2. С. 91–100.
Артикул Google Scholar
Зееман П. Влияние намагничивания на природу света, излучаемого веществом, Nature, 1897. vol. 55, нет. 1424, стр. 347.
Статья Google Scholar
Бор Н., О влиянии электрических и магнитных полей на спектральные линии, Лондонский, Эдинбургский и Дублинский философский журнал и научный журнал , 1914, вып. 27, нет. 159. С. 506–524.
27, нет. 159. С. 506–524.
Артикул Google Scholar
Раман, C.V., Новое излучение, Indian Journal of Physics , 1928, т. 2. С. 387–398.
Google Scholar
Пешехонов В.Г., Степанов О.А., Августов Л.И., Блажнов Б.А. и др., Современные методы и средства измерения параметров гравитационного поля Земли , Пешехонов, В.Г., Под ред. Санкт-Петербург: ЦНИИ Электроприбор, 2017.
Мюнтинга Х. и др., Интерферометрия с конденсатами Бозе-Эйнштейна в условиях микрогравитации, Physical Review Letters , 2013, т. 110, нет. 9, стр. 093602.
Статья Google Scholar
Борд К.Дж., Атомная интерферометрия с маркировкой внутреннего состояния, Physics Letters A , 1989, т. 140. С. 10–12.
Артикул Google Scholar
Такасе, К. , Прецизионные измерения скорости вращения с помощью интерферометра подвижного атома, канд. Тезис , Стэнфордский университет, Стэнфорд, Калифорния, США, 2008.
, Прецизионные измерения скорости вращения с помощью интерферометра подвижного атома, канд. Тезис , Стэнфордский университет, Стэнфорд, Калифорния, США, 2008.
Фанг, Б., Датта, И. и др., Метрология с атомной интерферометрией: инерционные датчики от лаборатории к полевым приложениям, Journal of Physics Серия конференций, 8-й симпозиум по стандартам частоты и метрологии 2015, 2016, т. 723, стр. 012049.
Ельяшевич М.А., Атомная и молекулярная спектроскопия.Общие вопросы спектроскопии, , М .: УРСС, 2006.
Франций. Популярная библиотека химических элементов. http://n-t.ru/ri/ps/pb087.htm. Цитировано 5 апреля 2021 года.
Куриный сувлаки Gyro Style
Нам очень понравился этот рецепт! По традиции в пятницу вечером мы с мужем ходим в наш любимый греческий ресторан и ездим на гироскопах, но сегодня вечером холодно, поэтому я решила приготовить их дома.Вкусные! Соус был отличный, я бы порекомендовал добавить больше лимона, греческой приправы и укропа. Я также увеличила вдвое чеснок. Я использовал 2/3 стакана бальзамического и 1/3 стакана оливкового масла вместо уксуса. Сегодня без гриля, поэтому я запекала курицу с небольшим количеством маринада 45 минут при температуре 350 градусов. Идеально! Спасибо, что поделился.
Я также увеличила вдвое чеснок. Я использовал 2/3 стакана бальзамического и 1/3 стакана оливкового масла вместо уксуса. Сегодня без гриля, поэтому я запекала курицу с небольшим количеством маринада 45 минут при температуре 350 градусов. Идеально! Спасибо, что поделился.
Отлично. Я сделал это зимой, поэтому мы не использовали гриль. Жарила курицу по 8 мин с каждой стороны. Я использовала легкую сметану и обезжиренный йогурт, и цацики получились фантастическими и полезными.Моему мужу это понравилось, мне понравилось. Обязательно купите толстый качественный лаваш. Мой магазин был ограничен, и лаваш немного развалился, но вкуса это не испортило.
У этого был фантастический вкус и действительно хит. Напомнил мне о моем любимом студенческом пита-заведении моего мужа и меня. Что касается людей, которых смущает рецепт куриного маринада, убедитесь, что вы используете бальзамический уксус, как указано, вместо обычного бальзамического уксуса, 2 ПОЛНОСТЬЮ разные вещи. Винегрет – это заправка для салатов, приготовленная из равных частей или немного большего количества оливкового масла до бальзамического, а также чеснока, трав и т. Д.. Рецепт просто прекрасен, как написано! Спасибо за прогулку по переулку памяти!
Д.. Рецепт просто прекрасен, как написано! Спасибо за прогулку по переулку памяти!
Отлично получилось. Я кое-что подправил, даже не осознавая этого. (Я распечатал рецепт и оставил его внизу!) Я использовал 2 хороших капли лимонного сока. И 3 «коктейля» греческой приправы без орегано. Я также использовал более простой и УДИВИТЕЛЬНЫЙ соус цацики … 1 чашка простого йогурта 2 ч. Оливкового масла 1 ч. Лимонного сока 1/2 соли 1/2 перца 1 ч. Нарезанного свежего укропа 3-4 зубчика свежего натертого чеснока 2 ч. Мелко нарезанного огурца это было высушено бумажными полотенцами 1-2 встряхивания греческой приправы.Перемешайте и дайте остыть в холодильнике в течение часа. САМАЯ ЛУЧШАЯ комбинация.
ФАНТАСТИЧЕСКИЙ !!! Это занимает немного времени, но затраченные усилия на 100 +++% окупаются. Если вы подготовите их поэтапно, с ними будет намного легче справиться. Я быстро приготовил свой маринад / соус цацики сегодня днем, поэтому все, что мне нужно было сделать во время обеда, – это приготовить курицу на гриле (на моем внутреннем двустороннем гриле). Всем, кто хочет попробовать, у меня есть несколько советов. Во-первых, вы ДОЛЖНЫ использовать бальзамический винегрет (его можно найти в проходе с заправками для салатов в бакалейной лавке), НЕ используйте чистый бальзамический уксус! Винегрет содержит специи и EVOO, которые помогают уменьшить терпкость уксуса.Во-вторых, греческий йогурт – ОЧЕНЬ лучший выбор для этого огуречного соуса. Цацики должен быть густым, а не жидким или водянистым. Если вы не процедите йогурт, вы получите жидкий соус. Греческий йогурт уже процежен. Да, дороже, но и удобнее. Наконец, чтобы огурцы хорошо «потели», бросьте их с солью (соль вытягивает воду), а затем сделайте то, что сделал рецензент MOLLE888 – поместите в дуршлаг / сито, установленное над миской с другой миской сверху. Поместите в миску тяжелую банку, чтобы усилить давление, и посмотрите, как жидкость просачивается на дно! У вас будут ИДЕАЛЬНЫЕ дзадзики каждый раз (обещаю!).Подаются с красным луком, помидорами и салатом айсберг (без пепперончини или оливок для нас), это место, которое можно сравнить с афинскими куриными питами в нашей любимой местной сети! Приправленный кудрявый картофель фри завершил нашу трапезу.
Всем, кто хочет попробовать, у меня есть несколько советов. Во-первых, вы ДОЛЖНЫ использовать бальзамический винегрет (его можно найти в проходе с заправками для салатов в бакалейной лавке), НЕ используйте чистый бальзамический уксус! Винегрет содержит специи и EVOO, которые помогают уменьшить терпкость уксуса.Во-вторых, греческий йогурт – ОЧЕНЬ лучший выбор для этого огуречного соуса. Цацики должен быть густым, а не жидким или водянистым. Если вы не процедите йогурт, вы получите жидкий соус. Греческий йогурт уже процежен. Да, дороже, но и удобнее. Наконец, чтобы огурцы хорошо «потели», бросьте их с солью (соль вытягивает воду), а затем сделайте то, что сделал рецензент MOLLE888 – поместите в дуршлаг / сито, установленное над миской с другой миской сверху. Поместите в миску тяжелую банку, чтобы усилить давление, и посмотрите, как жидкость просачивается на дно! У вас будут ИДЕАЛЬНЫЕ дзадзики каждый раз (обещаю!).Подаются с красным луком, помидорами и салатом айсберг (без пепперончини или оливок для нас), это место, которое можно сравнить с афинскими куриными питами в нашей любимой местной сети! Приправленный кудрявый картофель фри завершил нашу трапезу.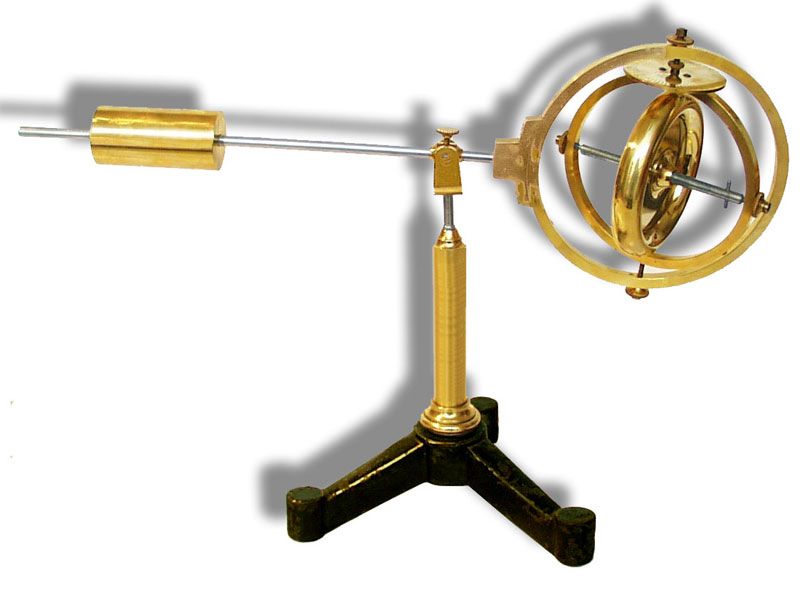 Спасибо, что поделился, Крис! 🙂
Спасибо, что поделился, Крис! 🙂
Я делал это дважды, и это было огромно в нашем доме. Не пугайтесь всех ингредиентов. Процесс приготовления несложный.
Мой муж жил в Греции два года и говорит, что этот рецепт был самым близким к настоящему рецепту, который он когда-либо пробовал с тех пор, как вернулся в США.соус идеальной консистенции, однако он сказал, что использовал бы больше огурцов, чем укропа. Я подумал, что это божественно, я хотел выпить, это было так вкусно!
Это был действительно отличный летний рецепт. Слегка подогревала лаваш на гриле (быстро становится хрустящим). Потратьте лишний доллар или два на хороший лаваш. В этом ВСЯ разница. Я подала пепперончини целиком. Я делал это несколько раз и начал использовать бальзамический уксус вместо заправки и итальянскую заправку Just 2 Good в качестве маринада.Я также использовал оловянную фольгу, чтобы сохранить форму лаваша, напоминающую тако. Это тоже сохраняет тепло. Возможно, лучший совет, который у меня есть, – это использовать процеженный йогурт – я нашел греческий йогурт в местном магазине деликатесов, но он может быть доступен в Whole Foods / Wild Oats.