
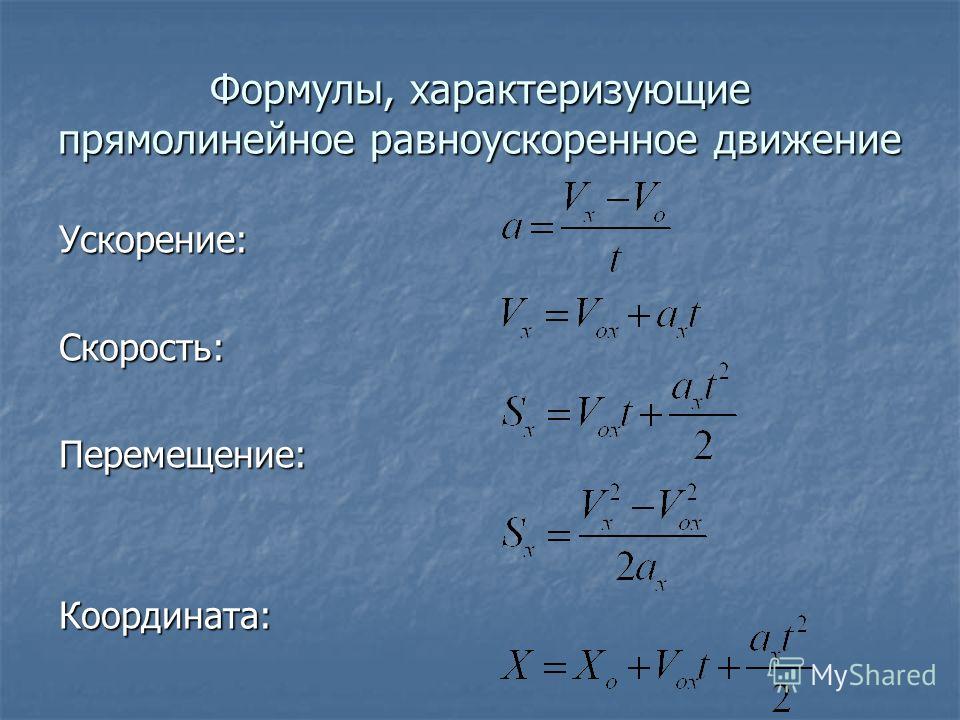
Перемещение при прямолинейном равноускоренном движении: формула расчета, ее использование
Важной темой, изучаемой в физике, является проблема перемещения тел в пространстве. Они могут двигаться по прямолинейным и криволинейным траекториям. Одним из самых простых видов является перемещение при равноускоренном прямолинейном движении. Рассмотрим его в статье.
Механическое движение тел
Вопрос изменения пространственных координат в процессе перемещения объектов интересует людей с давних времен. Так, древнегреческий философ Архимед полагал, что движение не является естественной формой существования окружающих предметов. Действительно, любой брошенный предмет, в конце концов, останавливается. Архимед не знал о силах трения, поэтому считал, что истинным состоянием всех тел является покой. Такой точки зрения придерживался и другой философ Античной Греции, Зенон, который в своих знаменитых парадоксах доказывал, что движение является иллюзией и в действительности не существует.
Только с приходом Нового времени теоретическое изучение вопроса движения вышло на следующий уровень. Важный вклад в исследование внес итальянец Галилео Галилей. Первый закон Ньютона в действительности сформулировал именно он. В своих трудах он отмечает, что всякое тело будет сохранять неизменными характеристики своего движения, если на него не воздействуют никакие внешние силы.
Теорию классического механического движения, выраженную в кратких и понятных математических формулах, создал великий английский ученый Исаак Ньютон. В частности, второй закон, носящий его имя, дает исчерпывающую информацию для описания перемещения тел в пространстве.
Сила, ускорение и масса
Эти три физические величины входят в знаменитую формулу, известную каждому школьнику. Запишем ее:
F¯ = m*a¯
Здесь сила F¯ и ускорение a¯ являются векторными величинами, направленными в одну и ту же сторону. Коэффициент пропорциональности между ними – это масса тела m.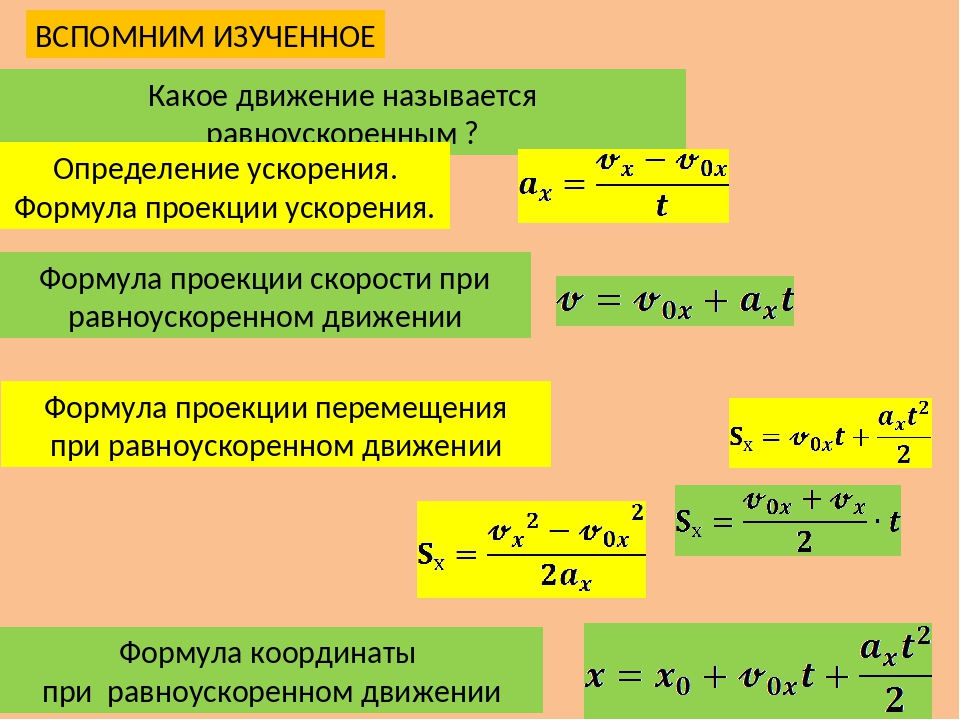
Записанная формула является основным выражением динамики. Сила является причиной изменения характеристик движения любого тела. Отсутствие внешней силы, оказывающей действие на тело, является достаточным условием для того, чтобы оно двигалось равномерно и прямолинейно.
Далее в статье рассмотрим формулы прямолинейного равноускоренного движения, которые описывают лишь результат действующих сил, то есть будем изучать перемещение тел с точки зрения кинематики.
Движение с постоянной скоростью
Перед тем, как рассматривать перемещение при прямолинейном равноускоренном движении, следует изучить его частный случай – равномерное изменение координат в пространстве. Прямолинейное равномерное движение математически описывается следующим равенством:
S = v*t
То есть путь, пройденный телом, пропорционален времени, в течение которого оно находится в движении, и скорости перемещения. Поскольку скорость измеряется в в системе СИ в метрах в секунду (м/с), а время в секундах (с), то путь рассчитывают в метрах (м).
Особенностью данного вида движения является его прямолинейный характер, причем скорость остается постоянной в каждый момент времени (v = const.). Если нарисовать графики скорости и пути в зависимости от времени в двумерной прямоугольной системе координат, то в первом случае получится горизонтальная (параллельная оси x линия), а во втором случае – прямая, выходящая из начала координат, имеющая угловой коэффициент, равный скорости (k = v).
Теперь предположим, что на находящееся в покое тело начала действовать сила. Согласно второму закону Ньютона, она вызовет ускорение тела. Скорость в этом случае будет изменяться по закону:
v = a*t
Это выражение говорит, что скорость, в отличие от равномерного движения, уже не будет величиной неизменной. Она растет с течением времени линейно. В свою очередь, ускорение a является постоянной величиной, поэтому движение называется равноускоренным, то есть происходящим с постоянным ускорением.
График скорости прямолинейного равноускоренного движения – это прямая линия, которая выходит из начала координат. Угловой ее коэффициент k равен ускорению a.
Угловой ее коэффициент k равен ускорению a.
Равноускоренное движение с начальной скоростью
Формула прямолинейного равноускоренного движения, записанная для скорости в предыдущем пункте, не является общей. Дело в том, что при ее составлении полагалось, что тело в нулевой момент времени находится в покое, то есть v = 0. Однако в общем случае оно может двигаться равномерно со скоростью v0 ≠ 0, которая называется начальной. В этом случае предыдущую формулу для скорости можно переписать так:
v = v0 + a*t
Описываемое этим выражением движение можно представить следующим образом: тело, на которое не действовали силы, двигалось со скоростью v0. Затем возникла внешняя сила, направленная так же, как и начальная скорость, и привела к появлению ускорения a.
В записанном выражении время t отсчитывается от нуля. Поэтому при изображении графика скорости в данном случае получится аналогичная прямая, параллельная прямой для равноускоренного движения без начальной скорости.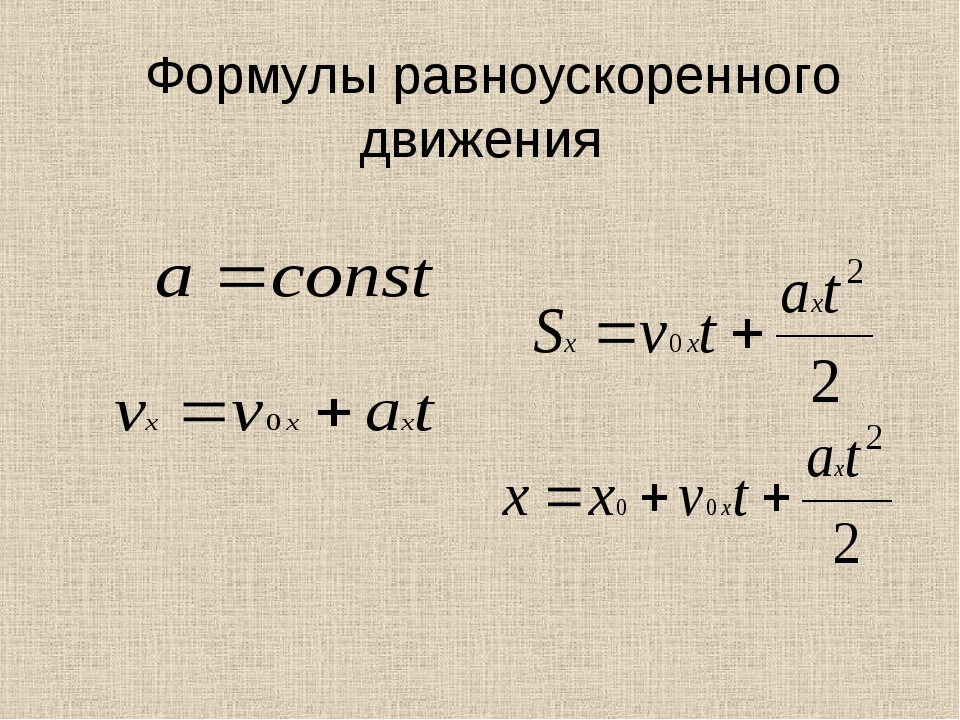 Однако она будет начинаться не с точки (0; 0), а с точки (0; v0).
Однако она будет начинаться не с точки (0; 0), а с точки (0; v0).
Заметим, что если действующая на тело сила будет направлена против вектора начальной скорости, то имеет место равнозамедленное движение. В этом случае будет справедлива формула:
v = v0 – a*t
График этой функции – линия, которая стремится к нулевому значению v от начального значения v0. Точка, где график пересечет ось x (t), покажет время, когда тело остановится. Это время равно:
t = v0/a
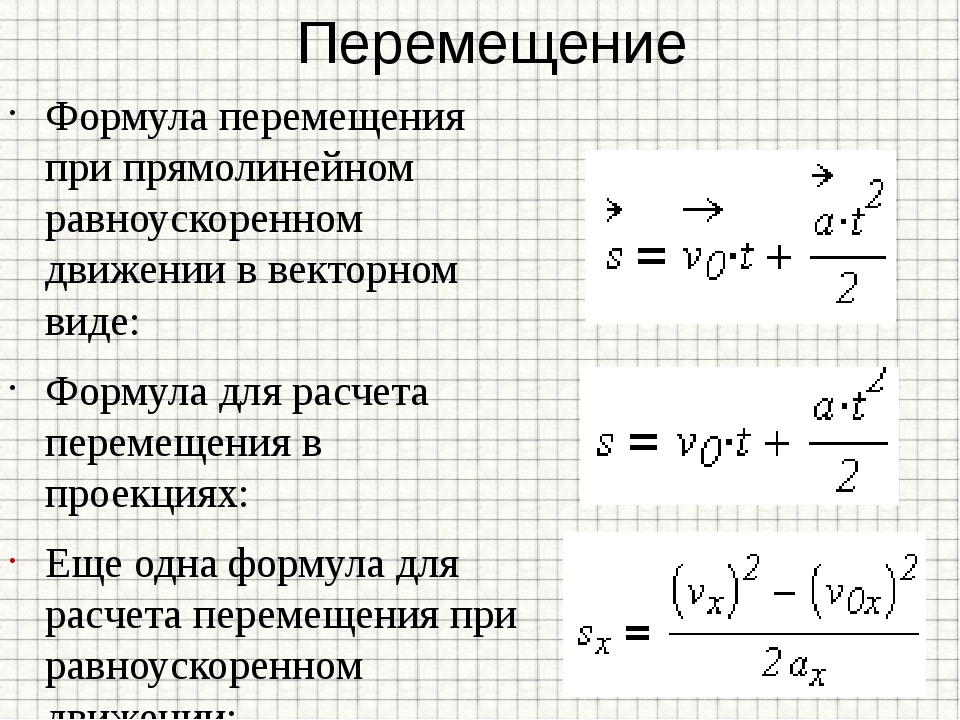
Пройденный путь
Перемещение при прямолинейном равноускоренном движении означает, какой путь прошло тело за известный промежуток времени. Вычислить этот путь можно, если проинтегрировать по времени соответствующие выражения для скорости.
Путь при прямолинейном равноускоренном движении, когда начальная скорость отсутствует, определяется из выражения:
S = ∫t(v*dt) = a*t2/2
Поскольку ускорение a является постоянным для рассматриваемого типа движения, то пройденный путь возрастает как квадрат от времени. График равноускоренного прямолинейного движения для пути S представляет собой правую ветвь параболы, которая начинается в начале координат.
График равноускоренного прямолинейного движения для пути S представляет собой правую ветвь параболы, которая начинается в начале координат.
Теперь получим аналогичное выражение для пути S, только учтем, что до получения ускорения тело уже обладало скоростью v0. Тогда формула для S примет следующий вид:
S = ∫t(v*dt) = ∫t((v0 + a*t)*dt) = v0*t + a*t2/2.
Графиком этой функции S(t) также будет парабола, однако ее значения будут лежать выше, чем в предыдущем случае. Путь при равноускоренном движении, когда начальная скорость нулю не равна, можно рассматривать как наложение двух видов движения: равномерное и равноускоренное.
Наконец, если тело двигалось со скоростью v0, а затем начало замедлять свое движение с постоянным ускорением a, то формула для S примет вид:
S = ∫t(v*dt) = ∫t((v0 – a*t)*dt) = v0*t – a*t2/2.

Ниже на рисунке показаны графики для записанных в этом пункте формул для S.
В первом случае речь идет об ускоренном движении с некоторой начальной скоростью, третий график – ускоренное движение без начальной скорости, а вторая кривая соответствует равнозамедленному движению. Видно, что две кривые 1 и 3 возрастают постоянно, но кривая 2 выходит на постоянное значение при некотором времени t. Это означает, что тело остановилось.
Примеры движения с ускорением
В быту можно привести ряд примеров перемещения при прямолинейном равноускоренном движении. Например, автомобиль, набирающий скорость после старта, самолет, который разгоняется на взлетной полосе, велосипедист, стремящийся остановиться (равнозамедленное).
Пожалуй, самым распространенным в природе движением с постоянным ускорением является падение тел в гравитационном поле нашей планеты. Если пренебречь силой трения воздуха, то процесс падения вблизи поверхности Земли происходит с ускорением 9,81 м/с2.
Далее покажем на примерах решения задач, как пользоваться приведенными формулами.
Задача с мотоциклистом
Известно, что расстояние между городами составляет 50 км. Мотоциклист преодолел это расстояние за 1 час. Известно, что 1/3 этого времени он двигался с постоянным ускорением, а 2/3 времени его скорость не изменялась. Необходимо вычислить конечную скорость, которую развил мотоциклист.
Для решения задачи воспользуемся следующими уравнениями прямолинейного равноускоренного движения:
S = a*(1/3*t)2/2 + v*2/3*t;
v = a*1/3*t
Где t – время, которое мотоциклист провел в пути. Подставляя второе выражение в первое, получаем значение ускорения a:
S = a*(1/3*t)2/2 + a*1/3*t*2/3*t =>
a = 18*S/( t2) = 18*50000/( 3600*3600) ≈ 0,014 м/с
Двигаясь с этим ускорением в течение 20 минут, мотоциклист развил скорость:
v = a*1/3*t = 0,01 1/3*3600 = 16,8 м/с или около 60,5 км/ч
Задача с брошенным вверх мячом
Мяч бросили вертикально вверх с начальной скоростью 10 м/с. Необходимо вычислить, на какую высоту он поднимется.
Необходимо вычислить, на какую высоту он поднимется.
Речь идет о равнозамедленном движении с начальной скоростью v0. Если обозначить максимальную высоту подъема h, тогда для нее можно записать формулу:
h = v0*t – g*t2/2.
Здесь g = 9,81 м/с2, t – время подъема. Чтобы его определить, необходимо обратиться к условию, когда скорость тела v станет равна нулю:
v = v0 – g*t = 0 =>
t = v0/g.
Подставляя время t в формулу для h, получаем:
h = v02/g – g*v02/(2*g2) = v02/(2*g).
Подставляем сюда значение скорости из условия, получаем ответ: h ≈ 5,1 метра. Любопытно отметить, что высота подъема тела от его массы не зависит.
Кинематика — что это такое? Что изучает?
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч и у вас нет никаких препятствий на пути, то вы скорее всего будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю. |
Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики. Скорость — это векторная физическая величина, характеризующая быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость → → → → t — время [с] |
Средняя путевая скорость V ср.путевая = S/t V ср. S — путь [м] t — время [с] |
В чем разница между перемещением и путем? Перемещение — это вектор, проведенный из начальной точки в конечную, а путь — это длина траектории. |
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср. путевая = 210/2,5 = 84 км/ч
путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уравнение движения
Основной задачей механики является определение положения тела в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения x(t) = x0 + vxt x(t) — искомая координата [м] x0 — начальная координата [м] vx — скорость тела в данный момент времени [м/с] t — момент времени [с] |
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v < 0), и тогда уравнение движения принимает вид:
Уравнение движения при движении против оси x(t) = x0 – vxt x(t) — искомая координата [м] x0 — начальная координата [м] vx — скорость тела в данный момент времени [м/с] t — момент времени [с] |
Графики
Изменение любой величины можно описать графически.
В видео ниже я рассказываю, как строить графики кинематических величин и зачем они нужны.
Прямолинейное равноускоренное движение
Чтобы разобраться с тем, что за тип движения в этом заголовке, нужно ввести новое понятие — ускорение.
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. В международной системе единиц СИ измеряется в метрах, деленных на секунду в квадрате.
СИ — международная система единиц.
«Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. 2.
2.
Частным случаем движения по вертикали (частным случаем частного случая, получается) считается свободное падение — это равноускоренное движение под действием силы тяжести, когда другие силы, действующие на тело, отсутствуют или пренебрежимо малы.
Помните о том, что свободное падение — это не всегда движение по вертикали. Если мы бросаем тело вверх, то начальная скорость, конечно же, будет.
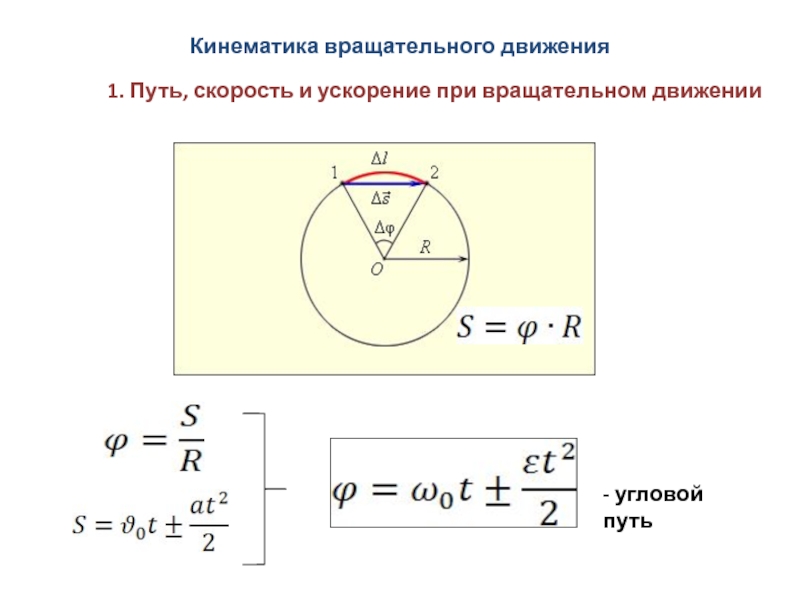
Движение по окружности
Движение по окружности — простейший случай криволинейного движения тела, когда тело движется вокруг некоторой точки. Очень важно разделить движение по окружности и вращение тела.
При вращательном движении тела все его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой  Ось вращения может располагаться внутри тела и за его пределами.
Ось вращения может располагаться внутри тела и за его пределами.
Движение тела по окружности с постоянной по модулю скоростью — это движение, при котором тело за любые равные промежутки времени описывает одинаковые дуги. Это очень похоже на равномерное движение, только в данном случае мы имеем дело с дугами.
При движении по окружности тело двигается вокруг одной точки, а при вращении — все точки тела движутся вокруг оси вращения.
В видеролике ниже рассказано про ускорение при криволинейном движении. Оно складывается из двух составляющих — нормальной и тангенциальной. При равномерном движении по окружности тангенциальная составляющая отсутствует, остается нормальная, которую мы в данном случае называем центростремительной.
Центростремительное ускорение
При движении по окружности модуль скорости постоянен, а вот направление скорости постоянно меняется. 2
2
Эту и другие темы мы разбираем на курсе физики за 9 класс.
FAQ – § 22. Путь, пройденный при равнопеременном движении.
Воспользуемся графическим способом нахождения пройденного пути для случая равноускоренного движения. Пусть график скорости равноускоренного движения изображен прямой ВС (рис. 36). Путь, пройденный за время t=OA, численно равен площади трапеции ОВСА:
s=площадьОВСА = (ОВ + АC)/2 *ОА
Рис. 36. Графическое нахождение формулы пути, пройденного при равноускоренном движении
Но OB=v0 (начальная скорость), AC=v0+at (скорость в момент t при ускорении а). Значит,
s = (v0 + (v0 + аt))/ 2 *t = v0t +at2/2 (22.1)
Эта формула справедлива как для равноускоренного, так и для равнозамедленного движения; в первом случае v0 и а одинаковы по знаку, а во втором — противоположны *).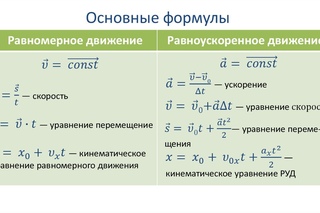 Для движения с начальной скоростью, равной нулю, на графике вместо трапеции получается прямоугольный треугольник ODA с катетами OA=t и AD=v=at, так что площадь, выражающая пройденный путь, оказывается равной
Для движения с начальной скоростью, равной нулю, на графике вместо трапеции получается прямоугольный треугольник ODA с катетами OA=t и AD=v=at, так что площадь, выражающая пройденный путь, оказывается равной
s = аt/ 2 *t = at2/2 (22.2)
*) Справедливость формул (22.1) и (22.2) отнюдь не ограничивается прямолинейным движением. Эти формулы справедливы и для расчета пути тела, движущегося по криволинейной траектории, например по окружности, если движение происходит при постоянном ускорении а, всегда коллинеарном скорости v.
Эту формулу можно было бы получить и непосредственно из предыдущей формулы, полагая v0=0.
На рис. 37 дан график пути равноускоренного движения с начальной скоростью, равной нулю. График построен по формуле (22.2) для значения а=2 м/с2. Он изображается кривой линией, поднимающейся вверх все круче и круче. Расстояния точек графика от оси времени пропорциональны квадратам расстояний от оси пути. Такая кривая называется параболой.
Расстояния точек графика от оси времени пропорциональны квадратам расстояний от оси пути. Такая кривая называется параболой.
Из формулы (22.2) видно, что при начальной скорости, равной нулю, путь, пройденный при равноускоренном движении за первую секунду движения (t=1 с) численно равен половине ускорения. Если известен путь, пройденный без начальной скорости за время t, то ускорение можно найти по формуле
a = 2s/t2 (22.3)
Рис. 37. График пути при равноускоренном движении
Если начальная скорость v0 равна нулю, можно выразить путь s, пройденный к моменту t, через скорость v в этот момент или скорость — через пройденный путь. Действительно, в этом случае v=at и s=at2/2. Исключая из этих выражений t, найдем
s = v2 / 2a (22. 4)
4)
v = (2as)1/2 (22.5)
Наконец, зная пройденный путь и ускорение, можно, воспользовавшись формулой (22.2), найти время движения:
t = (2s/a)1/2 (22.6)
Впервые законы равноускоренного движения были найдены Галилеем при изучении движения шарика по наклонному желобу (описано в 1638 г.). В его время еще не было точных часов и Галилей измерял время движения при помощи своего рода водяных часов — взвешивая воду, вытекшую из сосуда через узкое отверстие. Галилей пускал шарик по наклонному желобу (без начальной скорости) и измерял расстояния, которые проходил шарик за время, соответствующее определенному количеству вытекшей из сосуда воды. Несмотря на несовершенство метода измерений, Галилею удалось обнаружить, что путь, проходимый шариком, пропорционален квадрату времени, за которое этот путь пройден,
?22.1. Напишите формулы, аналогичные (22.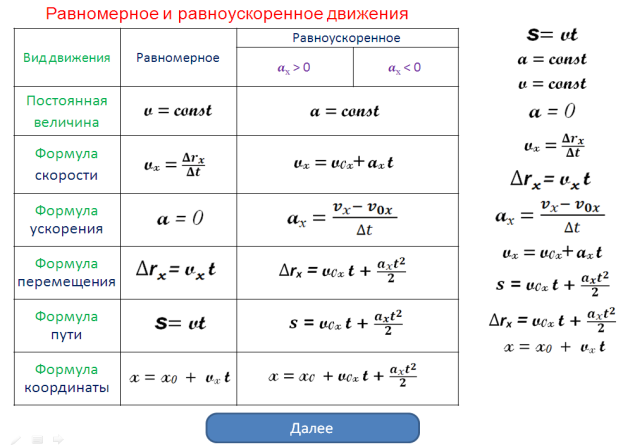 4) и (22.5), для случая начальной скорости v0, не равной нулю.
4) и (22.5), для случая начальной скорости v0, не равной нулю.
22.2. Покажите, пользуясь формулой (22.1), что для равноускоренного движения пути, проходимые точкой за любые равные промежутки времени, следующие друг за другом, получают одинаковое приращение,
22.3. Покажите, пользуясь формулой (22.2), что для равноускоренного движения без начальной скорости приращения пути за любые равные промежутки времени, следующие друг за другом, равны двойному пути, проходимому точкой за первый такой промежуток времени.
22.4. Электровоз подходит по горизонтальному пути к уклону, имея скорость 8 м/с, затем движется по уклону вниз с ускорением 0,2 м/с2. Определите длину уклона, если электровоз проходит его за 30 с.
22.5. Электровоз начинает двигаться равноускоренно в тот момент, когда с ним поравнялся мальчик, бегущий равномерно со скоростью 2 м/с. Определите скорость электровоза в тот момент, когда он догонит мальчика.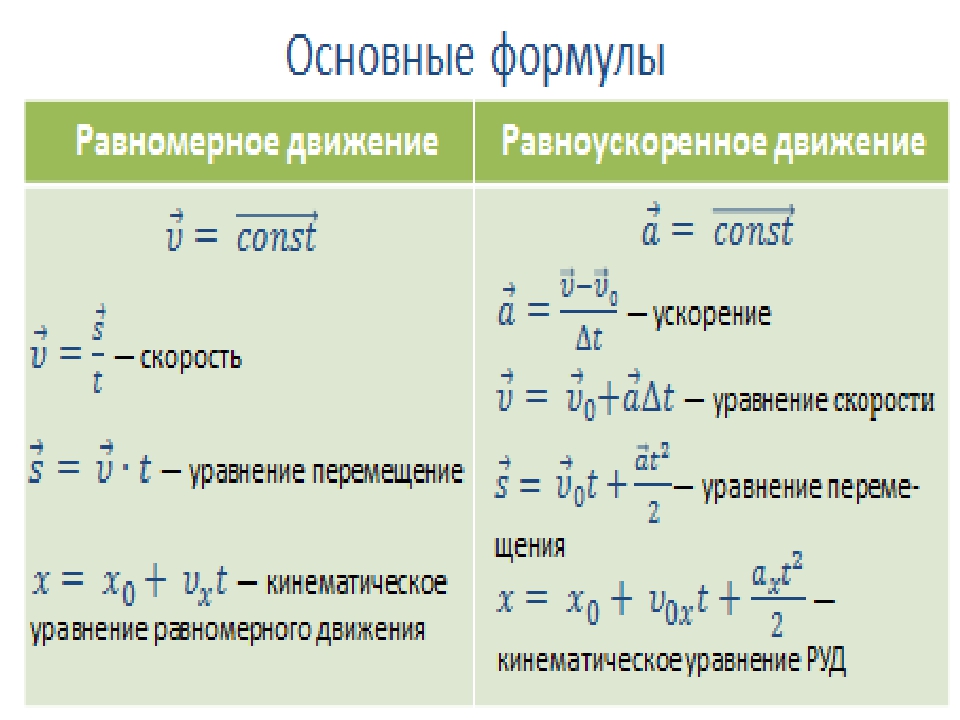
22.6. Автомобиль, пройдя с постоянным ускорением некоторое расстояние от остановки, достиг скорости 20 м/с. Какова была его скорость на половине этого расстояния?
22.7. Какой путь прошло тело за время, в течение которого скорость его увеличилась с 4 до 12 м/с, если ускорение равно 2 м/с2?
18A: Круговое движение — центростремительное ускорение
Существует тенденция полагать, что если объект движется с постоянной скоростью, то он не имеет ускорения. Это действительно верно в случае объекта, движущегося по прямолинейному пути. С другой стороны, частица, движущаяся по криволинейной траектории, ускоряется независимо от того, меняется ее скорость или нет. Скорость имеет как величину, так и направление. В случае частицы, движущейся по криволинейной траектории, направление скорости постоянно меняется, и, таким образом, частица имеет ускорение.
Обратимся теперь к случаю, когда объект движется по кругу.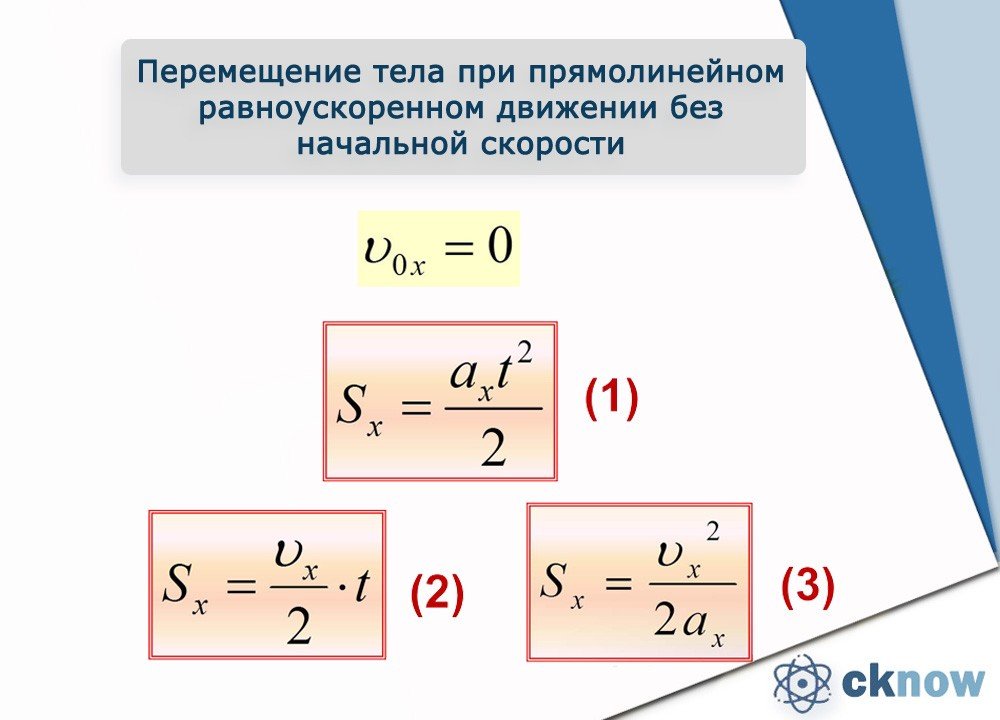 Мы начнем с простейшего случая кругового движения, случая, когда скорость объекта постоянна, случая, называемого равномерным круговым движением. На данный момент позвольте вам быть объектом. Представьте, что вы находитесь в автомобиле, который едет против часовой стрелки, скажем, со скоростью 40 миль в час, если смотреть сверху, по довольно небольшой круговой дорожке. Вы путешествуете по кругу. Ваша скорость непостоянна.Величина вашей скорости не меняется (постоянная скорость), но направление вашей скорости постоянно меняется, вы продолжаете поворачивать налево! Теперь, если вы постоянно поворачиваете налево, вы должны постоянно приобретать некоторую скорость движения влево. На самом деле, ваше ускорение должно быть точно влево, под прямым углом к вашей скорости, потому что, если ваша скорость не меняется, но ваша скорость постоянно меняется, это означает, что у вас есть некоторое ускорение \(\vec{a}=\dfrac{d \vec{v}}{dt}\), то для каждого бесконечно малого изменения показаний часов \(dt\) изменение скорости \(d\vec{v}\), которое происходит в течение этого бесконечно малого интервала времени, должно быть перпендикулярно к самой скорости.
Мы начнем с простейшего случая кругового движения, случая, когда скорость объекта постоянна, случая, называемого равномерным круговым движением. На данный момент позвольте вам быть объектом. Представьте, что вы находитесь в автомобиле, который едет против часовой стрелки, скажем, со скоростью 40 миль в час, если смотреть сверху, по довольно небольшой круговой дорожке. Вы путешествуете по кругу. Ваша скорость непостоянна.Величина вашей скорости не меняется (постоянная скорость), но направление вашей скорости постоянно меняется, вы продолжаете поворачивать налево! Теперь, если вы постоянно поворачиваете налево, вы должны постоянно приобретать некоторую скорость движения влево. На самом деле, ваше ускорение должно быть точно влево, под прямым углом к вашей скорости, потому что, если ваша скорость не меняется, но ваша скорость постоянно меняется, это означает, что у вас есть некоторое ускорение \(\vec{a}=\dfrac{d \vec{v}}{dt}\), то для каждого бесконечно малого изменения показаний часов \(dt\) изменение скорости \(d\vec{v}\), которое происходит в течение этого бесконечно малого интервала времени, должно быть перпендикулярно к самой скорости.

У нас есть несколько способов описать движение частицы, движущейся по окружности.Во-первых, мы характеризуем его с точки зрения того, как далеко частица прошла по окружности. Если нам нужна переменная положения, мы устанавливаем начальную точку на окружности и положительное направление. Например, для окружности с центром в начале координат плоскости xy мы можем определить точку, в которой окружность пересекает положительную ось x, как начальную точку, а направление, в котором должна двигаться частица, чтобы двигаться против часовой стрелки вокруг окружности, как начальную точку. положительное направление. Имя, данное этой переменной позиции, — s.Позиция s — это общее расстояние, измеренное по окружности, которое прошла частица. Тогда скорость частицы равна скорости изменения s, \(\dfrac{ds}{dt}\), а направление скорости является касательной к окружности. Сама окружность определяется своим радиусом. Второй способ описания движения частицы состоит в том, чтобы описать его в терминах воображаемого отрезка, идущего от центра окружности к частице.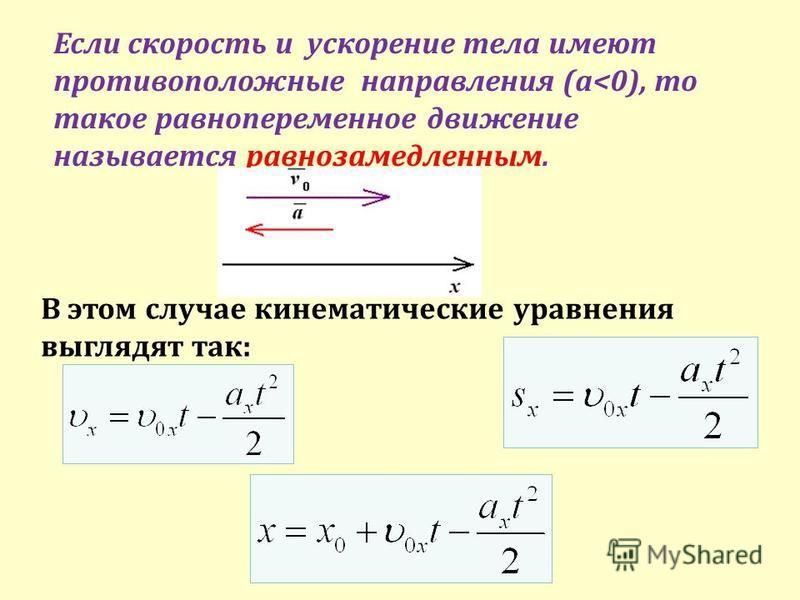 Чтобы использовать этот метод, также необходимо определить отрезок опорной линии — положительная ось x является обычным выбором для случая окружности с центром в начале системы координат x-y.Затем, если вы знаете радиус r окружности, угол \(тета\), который линия к частице образует с опорной линией, полностью определяет местоположение частицы.
Чтобы использовать этот метод, также необходимо определить отрезок опорной линии — положительная ось x является обычным выбором для случая окружности с центром в начале системы координат x-y.Затем, если вы знаете радиус r окружности, угол \(тета\), который линия к частице образует с опорной линией, полностью определяет местоположение частицы.
В геометрии переменная положения s определяет длину дуги на окружности. Напомним, что по определению угол \(\theta\) в радианах равен отношению длины дуги к радиусу:
\[\тета=\dfrac{s}{r} \]
Решив для s мы имеем:
\[s=r\тета \метка{18-1}\]
, в котором мы интерпретируем s как положение частицы на окружности, а \(\theta\) как угол, который составляет воображаемый отрезок прямой от центра окружности к частице с опорный сегмент линии, такой как положительная ось x.Ясно, что чем быстрее движется частица, тем быстрее изменяется угол тета, и действительно, мы можем получить связь между скоростью частицы и скоростью изменения \(\тета\), просто взяв производную по времени от обоих стороны уравнения \(\ref{18-1}\). Давайте сделаем это.
Давайте сделаем это.
Начнем с производной обеих частей уравнения \(\ref{18-1}\) по времени:
\[\dfrac{ds}{dt}=r\dfrac{d\theta}{dt} \]
, а затем перепишите результат как:
.\[\dot{s} =r\dot{\theta}\]
просто для того, чтобы читатель привык к идее, что мы представляем производную по времени переменной, то есть скорость изменения этой переменной, записывая символ переменной с точкой над ним.Затем перепишем результат как
\[v=r \dot{\theta}\метка{18-2}\]
, чтобы подчеркнуть тот факт, что скорость изменения положения на окружности есть скорость частицы (величина скорости частицы). Наконец, мы определяем переменную \(\omega\) (“omega”) как скорость изменения угла, что означает, что \(\omega\) равно \(\dfrac{d\theta}{dt}\) и \(\omega\) равно \(\dot{\theta}\). Должно быть ясно, что \(\omega\) — это скорость вращения воображаемой линии от центра круга к частице.Мы называем эту скорость вращения величиной угловой скорости сегмента линии.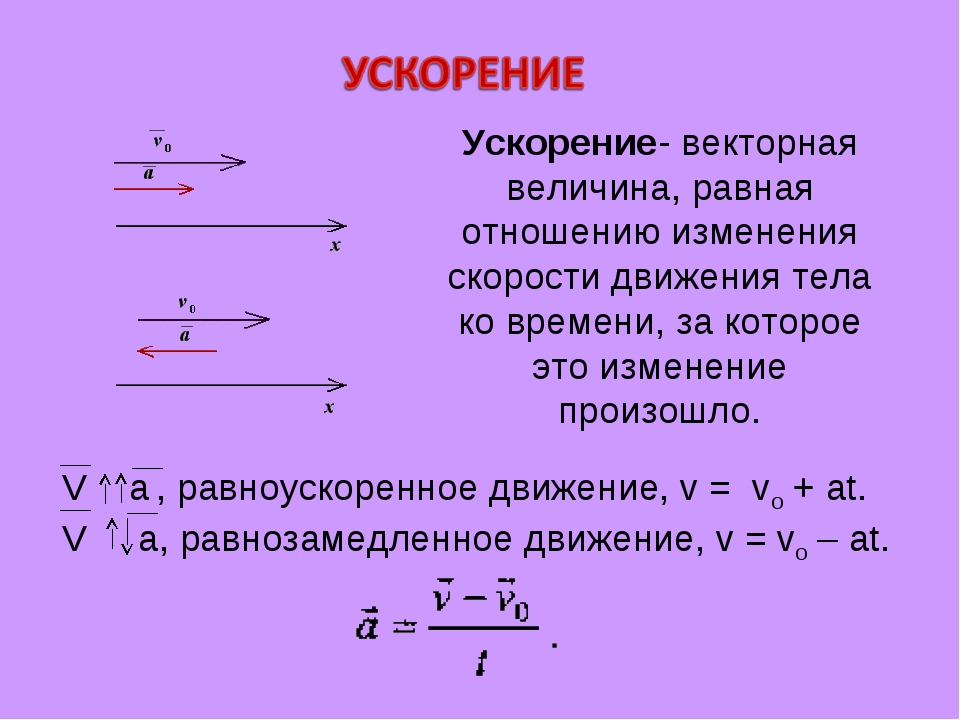 (Выражение «угловая скорость» \(\omega\) чаще используется для характеристики того, насколько быстро и в какую сторону вращается твердое тело, а не воображаемая линия.) Переписав \(v=r\dot{\theta} \) с заменой \(\dot{\theta}\) на \(\omega\) дает:
(Выражение «угловая скорость» \(\omega\) чаще используется для характеристики того, насколько быстро и в какую сторону вращается твердое тело, а не воображаемая линия.) Переписав \(v=r\dot{\theta} \) с заменой \(\dot{\theta}\) на \(\omega\) дает:
\[v=r\omega \метка{18-3}\]
Как центростремительное ускорение зависит от скорости частицы и размера окружности
Теперь мы можем вывести выражение для направленного к центру (центростремительного) ускорения, о котором мы говорили в начале этой главы.Рассмотрим короткий интервал времени \(\Delta t\). (Мы возьмем предел, когда \(\Delta t\) стремится к нулю до конца этой главы.) В течение этого короткого промежутка времени частица проходит расстояние \(\Delta s\) по окружности и угол, который линия, идущая от центра круга к частице, изменяется с опорной линией на величину \(\Delta \theta\).
Кроме того, за это время \(\Delta t\) скорость частицы изменяется от \(\vec{v}\) до \(\vec{v}’\), изменение \(\Delta \vec {v}\), определяемый \(vec{v}’=\vec{v}+\Delta\vec{v}\), изображенный на следующей векторной диаграмме (на которой стрелки, представляющие векторы \(\vec{v }\) и \(\vec{v}’\) были скопированы сверху без изменения ориентации или длины). Обратите внимание, что малый угол \(\Delta \theta\), появляющийся на диаграмме сложения векторов, совпадает с тем \(\Delta \theta\), который появляется на диаграмме выше.
Обратите внимание, что малый угол \(\Delta \theta\), появляющийся на диаграмме сложения векторов, совпадает с тем \(\Delta \theta\), который появляется на диаграмме выше.
Хотя \(\vec{v}’\) — новый вектор, отличный от \(\vec{v}\), мы оговорили, что скорость частицы является постоянной, поэтому вектор \(\vec{ v}’\) имеет ту же величину, что и вектор \(\vec{v}\). То есть \(\vec{v}’=\vec{v}\). Мы перерисовываем диаграмму сложения векторов, помечая оба вектора скорости одним и тем же символом v.
Величина центростремительного ускорения по определению может быть выражена как
\[a_c=\underset{\Delta t \rightarrow 0}{lim} \dfrac{\Delta V}{\Delta t}\]
Посмотрите на треугольник на приведенной выше диаграмме сложения векторов. Это равнобедренный треугольник. Два непомеченных угла в треугольнике равны друг другу. Кроме того, в пределе, когда \(\Delta t\) приближается к 0, \(\Delta \theta\) приближается к 0, и когда \(\Delta \theta\) приближается к 0, каждый из двух других углов должен приближаться к \(90 ^\circ\), чтобы сумма углов оставалась \(180 ^\circ\), как и должно быть, потому что сумма внутренних углов любого треугольника равна \(180 ^\circ\).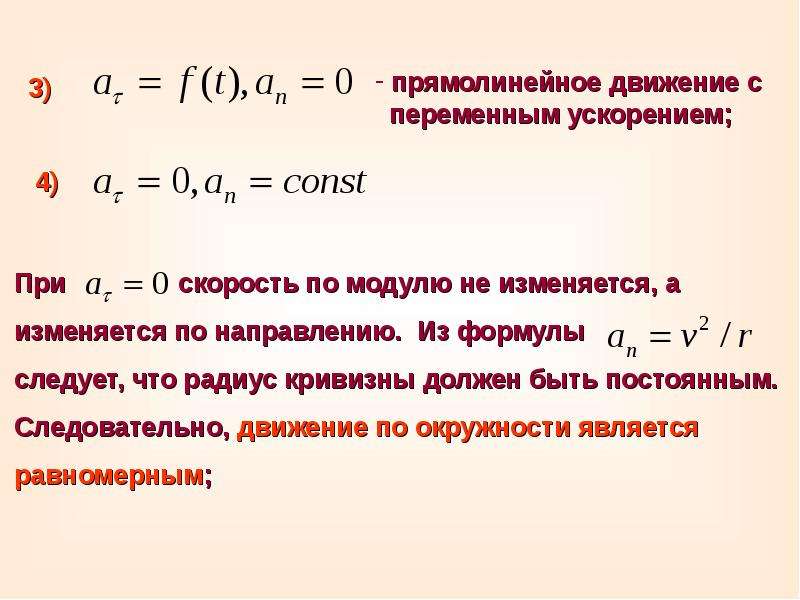 Таким образом, в пределе, когда \(\Delta t\) приближается к 0, треугольник является прямоугольным, и в этом пределе мы можем написать:
Таким образом, в пределе, когда \(\Delta t\) приближается к 0, треугольник является прямоугольным, и в этом пределе мы можем написать:
\[\dfrac{\Delta v}{v}=tan(\Delta \theta)\]
\[\Delta v=v \tan(\Delta \theta)\]
Подставив это в наше выражение для \(a_c\), мы получим:
\[a_c=\underset{\Delta t \rightarrow 0}{lim} \dfrac{vtan(\Delta\theta)}{\Delta t} \label{18-4}\]
Теперь мы используем приближение малого угла из математики плоской геометрии, приближение, которое становится реальным уравнением в пределе, когда \(\Delta \theta\) приближается к нулю.
Приближение малого угла
Для любого угла, который очень мал по сравнению с \(\pi\) радианами (чем меньше угол, тем лучше аппроксимация), тангенс угла приблизительно равен самому углу, выраженному в радианах; а синус угла примерно равен самому углу, выраженному в радианах. На самом деле
\[tan(\Delta\theta) \underset{\Delta \theta \rightarrow 0}{\rightarrow} \Delta\theta\]
и
\[sin(\Delta\theta) \underset{\Delta \theta \rightarrow 0}{\rightarrow} \Delta\theta\]
, где \(\Delta\theta\) в радианах.
Приближение малых углов позволяет записать
\[a_c=\underset{\Delta t\rightarrow 0}{lim} \dfrac{v \Delta \theta}{\Delta t}\]
[где мы заменили \(tan(\Delta\theta)\) в уравнении \(\ref{18-4}\) выше на \(\Delta \theta\) ].
Константа v может быть взята за предел, что даст \(a_c=\underset{\Delta t\rightarrow 0}{lim} \dfrac{\Delta \theta}{\Delta t}\). Но \(\underset{\Delta t\rightarrow 0}{lim} \dfrac{\Delta\theta}{\Delta t}\) – это скорость изменения угла \(\theta\), то есть по определению угловая скорость \(\omega\).2\метка{18-6}\]
Следует отметить, что, несмотря на то, что мы сосредоточили наше внимание на случае, когда частица, движущаяся по окружности, движется с постоянной скоростью, частица имеет центростремительное ускорение независимо от того, изменяется скорость или нет. Если скорость частицы изменяется, центростремительное ускорение в любой момент (по-прежнему) определяется уравнением \(\ref{18-5}\), где \(v\) является скоростью частицы в этот момент ( и в дополнение к центростремительному ускорению частица также имеет некоторое ускорение вдоль окружности, известное как тангенциальное ускорение). Случай, который мы исследовали, является, однако, замечательным случаем. Даже если скорость частицы постоянна, частица имеет некоторое ускорение только потому, что направление ее скорости постоянно меняется. Более того, центростремительное ускорение не является постоянным ускорением, потому что его направление постоянно меняется. Визуализируйте это. Если вы едете против часовой стрелки (если смотреть сверху) по круговой трассе, направление, в котором вы видите центр круга, постоянно меняется (и это направление является направлением центростремительного ускорения).Когда вы находитесь в самой восточной точке круга, центр находится к западу от вас. Когда вы находитесь в самой северной точке круга, центр находится к югу от вас. Когда вы находитесь в самой западной точке круга, центр находится к востоку от вас. А когда вы находитесь в самой южной точке круга, центр находится к северу от вас.
Случай, который мы исследовали, является, однако, замечательным случаем. Даже если скорость частицы постоянна, частица имеет некоторое ускорение только потому, что направление ее скорости постоянно меняется. Более того, центростремительное ускорение не является постоянным ускорением, потому что его направление постоянно меняется. Визуализируйте это. Если вы едете против часовой стрелки (если смотреть сверху) по круговой трассе, направление, в котором вы видите центр круга, постоянно меняется (и это направление является направлением центростремительного ускорения).Когда вы находитесь в самой восточной точке круга, центр находится к западу от вас. Когда вы находитесь в самой северной точке круга, центр находится к югу от вас. Когда вы находитесь в самой западной точке круга, центр находится к востоку от вас. А когда вы находитесь в самой южной точке круга, центр находится к северу от вас.
Авторы и авторство
Crypto Acceleration: открывая путь к будущему вычислений
Intel видит будущее, в котором зашифровано все, от списка покупок до медицинских карт.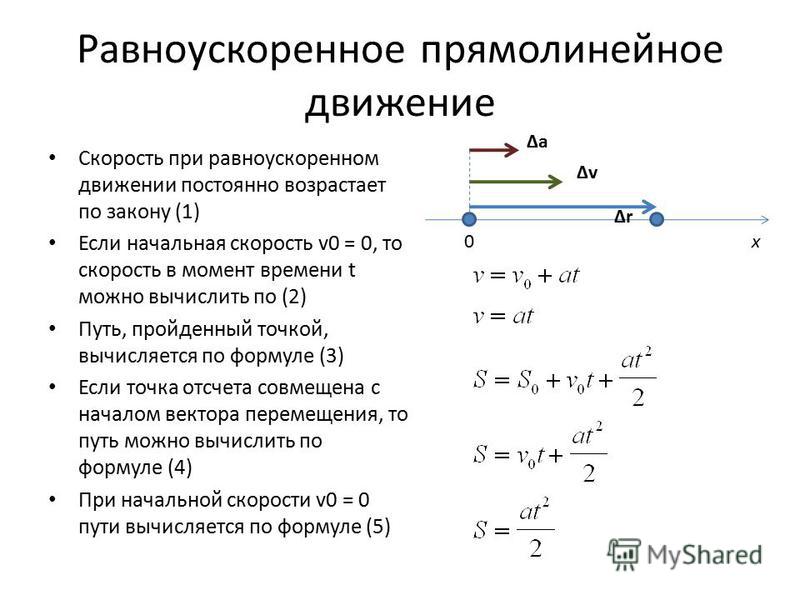 Сегодня данные криптографически защищены на всех уровнях программного обеспечения, сети и стеков хранения, что приводит к возможности выполнения нескольких криптографических операций над каждым байтом данных. Эти криптографические операции очень требовательны к вычислительным ресурсам, однако они часто поддерживают важные бизнес-операции, где безопасность имеет первостепенное значение. Подход Intel заключается в снижении стоимости вычислений криптографических алгоритмов, которые используются для шифрования данных.
Сегодня данные криптографически защищены на всех уровнях программного обеспечения, сети и стеков хранения, что приводит к возможности выполнения нескольких криптографических операций над каждым байтом данных. Эти криптографические операции очень требовательны к вычислительным ресурсам, однако они часто поддерживают важные бизнес-операции, где безопасность имеет первостепенное значение. Подход Intel заключается в снижении стоимости вычислений криптографических алгоритмов, которые используются для шифрования данных.
Уже более десяти лет корпорация Intel лидирует в отрасли по снижению вычислительных затрат на криптографические алгоритмы за счет инновационных инструкций, усовершенствований микроархитектуры и новейших методов оптимизации программного обеспечения.В результате отрасль отреагировала неуклонным ростом использования надежных криптографических шифров для лучшей защиты данных и связи.
«Корпорация Intel обладает богатым набором криптографических технологий, что позволяет нам постоянно быть в курсе последних инноваций, — сказал Ваджди Фегали, научный сотрудник Intel в группе безопасности, архитектуры и инженерии Intel. «Поскольку достижения в области квантовых вычислений продолжают развиваться, Intel работает над внедрением надлежащей криптографии на аппаратном уровне.Будущая процессорная архитектура Intel Xeon под кодовым названием «Ice Lake» содержит несколько новых инструкций в сочетании с алгоритмическими и программными инновациями для обеспечения прорывной производительности для наиболее широко используемых в отрасли криптографических шифров».
«Поскольку достижения в области квантовых вычислений продолжают развиваться, Intel работает над внедрением надлежащей криптографии на аппаратном уровне.Будущая процессорная архитектура Intel Xeon под кодовым названием «Ice Lake» содержит несколько новых инструкций в сочетании с алгоритмическими и программными инновациями для обеспечения прорывной производительности для наиболее широко используемых в отрасли криптографических шифров».
Краткая история
В начале 2000-х годов в публикации 197 федеральных стандартов обработки информации (FIPS) было указано определение стандарта расширенного шифрования (AES). Внимательно следя за этим процессом, корпорация Intel предприняла смелый шаг, дополнив набор инструкций своего процессора общего назначения набором инструкций с фиксированными функциями, новыми инструкциями Intel® AES, которые значительно снизили бы вычислительные затраты для симметричного шифрования AES.Инструкции были впервые представлены в 2010 году в семействе процессоров Intel® Core™.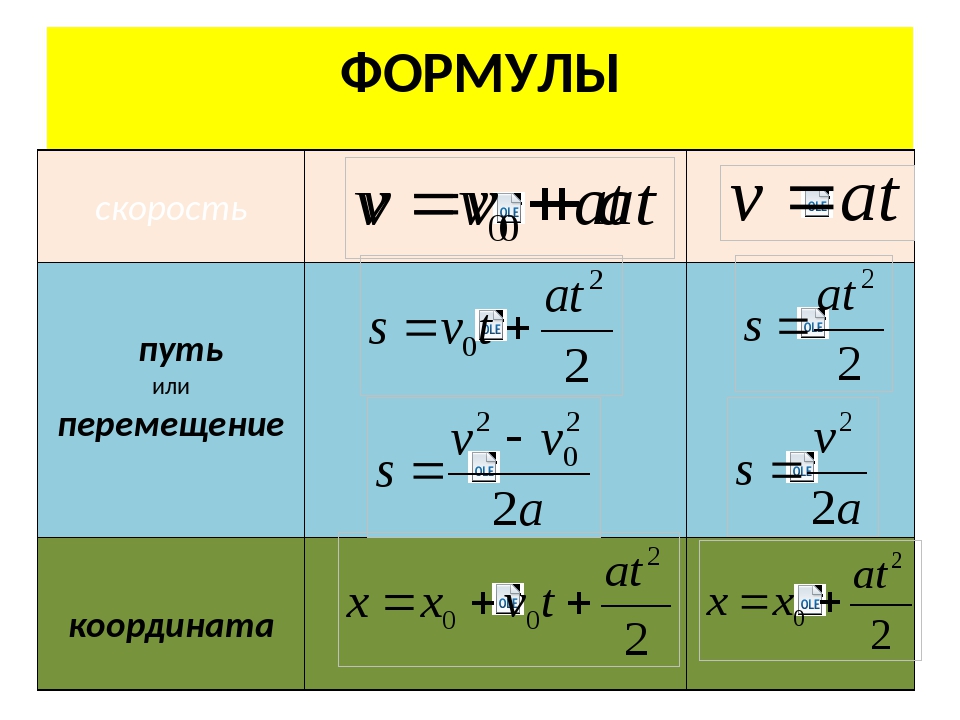
Текущая перспектива
Сегодня безопасность данных, связи и систем в значительной степени зависит от набора алгоритмов FIPS-140-2 . По мере того, как отрасль приближается к возможному квантовому компьютеру, многие алгоритмы могут подвергаться риску ослабления средств контроля безопасности. Это повлияет как на симметричные, так и на асимметричные или криптографические алгоритмы с открытым ключом. Симметричные алгоритмы (AES) можно сделать устойчивыми к квантовым атакам за счет увеличения размера ключа (от 128 до 256 бит).Однако новые алгоритмы постквантовой защиты, скорее всего, заменят существующие алгоритмы асимметричного шифрования (RSA и ECDSA). Отрасли, возможно, потребуется перейти на новые стандарты постквантовой криптографии и обеспечить ускорение этих схем, чтобы успешно пережить предстоящее десятилетие.
Корпорация Intel ожидает длительного переходного периода, когда существующие алгоритмы продолжают развертываться, пока принимаются новые алгоритмы, устойчивые к постквантовым воздействиям.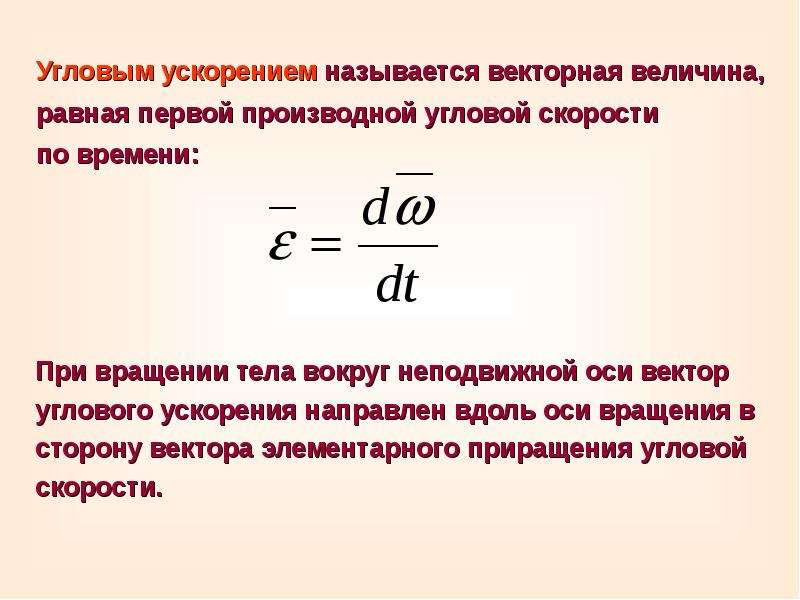 Ожидается, что это приведет к высокой вычислительной нагрузке, которую следует решить с помощью дополнительных инноваций.Чтобы поддержать следующую волну внедрения как симметричных алгоритмов, так и алгоритмов с открытым ключом, Intel продолжает инвестировать в новые усовершенствования микроархитектуры и инновационные программные методы, которые при совместном использовании могут помочь сократить объем вычислений, необходимых для развертывания надежной криптографии в будущем.
Ожидается, что это приведет к высокой вычислительной нагрузке, которую следует решить с помощью дополнительных инноваций.Чтобы поддержать следующую волну внедрения как симметричных алгоритмов, так и алгоритмов с открытым ключом, Intel продолжает инвестировать в новые усовершенствования микроархитектуры и инновационные программные методы, которые при совместном использовании могут помочь сократить объем вычислений, необходимых для развертывания надежной криптографии в будущем.
Новые масштабируемые процессоры Intel® Xeon® 3-го поколения
В грядущих процессорах Intel Xeon Scalable 3-го поколения под кодовым названием «Ice Lake» Intel улучшила производительность наиболее широко используемых шифров безопасности транспортного уровня (TLS).К массовым передачам данных TLS применяются два алгоритма: шифрование и аутентификация.
Начиная с архитектуры набора инструкций (ISA), Intel представила несколько улучшений, призванных значительно повысить криптографическую производительность.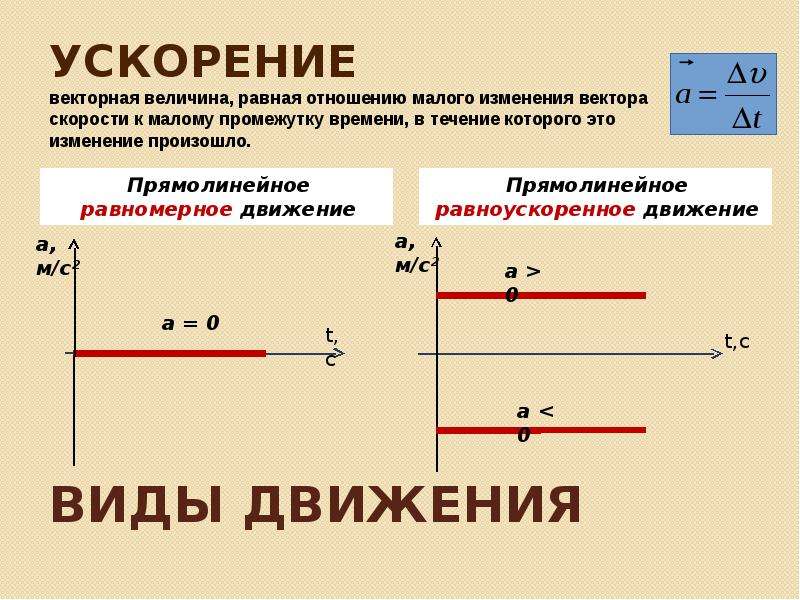
Криптография с открытым ключом
Новая поддержка ISA для умножения «больших чисел», часто встречающегося в шифрах с открытым ключом, AVX512 Integer Fused Multiply Add (AVX512_IFMA). Инструкции умножают восемь 52-битных целых чисел без знака, найденных в широких 512-битных (ZMM) регистрах, чтобы получить старшую и младшую половины результата и добавить к восьми 64-битным аккумуляторам.В сочетании с методами оптимизации программного обеспечения, такими как многобуферная обработка, эти инструкции обеспечивают значительное повышение производительности для RSA и криптографии на основе эллиптических кривых.
Симметричное шифрование
Два усовершенствования инструкций повышают производительность симметричного шифрования AES: векторизованное AES (VAES) и векторизованное умножение без переноса. Инструкции VAES были расширены для поддержки векторной обработки до четырех блоков AES (128 бит) за раз с использованием расширенных 512-битных регистров (ZMM).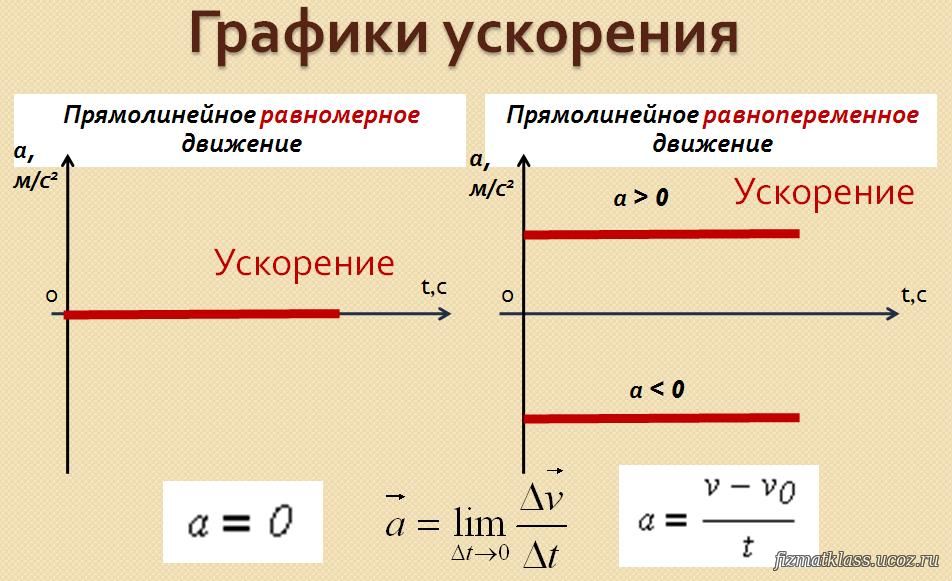 операция.Intel также расширяет поддержку векторной обработки до четырех операций умножения без переноса одновременно, используя широкие 512-битные (ZMM) регистры, чтобы обеспечить дополнительную производительность хеширования Галуа и широко используемого шифрования AES-GCM.
операция.Intel также расширяет поддержку векторной обработки до четырех операций умножения без переноса одновременно, используя широкие 512-битные (ZMM) регистры, чтобы обеспечить дополнительную производительность хеширования Галуа и широко используемого шифрования AES-GCM.
Хэширование
Алгоритм безопасного хеширования(SHA) также повышает производительность благодаря недавно добавленным расширениям Intel® SHA Extensions. Эти инструкции обеспечивают значительное улучшение производительности SHA-256. Хотя расширения SHA уже некоторое время доступны для архитектур на базе Intel Atom®, теперь они доступны и для основных архитектур, начиная с Ice Lake.
В дополнение к этим усовершенствованиям Intel использовала фундаментальные алгоритмические и программные инновации в Ice Lake.
Функция Сшивание
В 2010 году корпорация Intel впервые применила методику оптимизации двух алгоритмов, которые обычно работают в комбинации, но последовательно, например AES-CBC и SHA256, и объединения их в единый оптимизированный алгоритм, ориентированный на максимальное использование ресурсов процессора и пропускной способности. Результатом является точное чередование инструкций каждого алгоритма, так что оба алгоритма выполняются одновременно.Это позволяет исполнительным модулям процессора, которые в противном случае простаивали бы при выполнении одного алгоритма из-за зависимостей данных или задержек инструкций, выполнять инструкции из другого алгоритма и наоборот. Дополнительную информацию о функциональном сшивании можно найти в этой статье.
Результатом является точное чередование инструкций каждого алгоритма, так что оба алгоритма выполняются одновременно.Это позволяет исполнительным модулям процессора, которые в противном случае простаивали бы при выполнении одного алгоритма из-за зависимостей данных или задержек инструкций, выполнять инструкции из другого алгоритма и наоборот. Дополнительную информацию о функциональном сшивании можно найти в этой статье.
Мультибуфер
Multi-buffer — это инновационный и эффективный метод параллельной обработки нескольких независимых буферов данных для криптографических алгоритмов. Intel ранее реализовала этот метод для таких алгоритмов, как хеширование и симметричное шифрование.Одновременная обработка нескольких буферов может привести к значительному повышению производительности — как в случае, когда код может использовать преимущества инструкций с одной инструкцией и несколькими данными (AVX/AVX2/AVX512), так и в случае, когда это невозможно. Дополнительную информацию о мультибуфере можно найти в этой статье.
Будущая платформа Ice Lake призвана стать самой защищенной платформой Intel Xeon из когда-либо существовавших со встроенным ускорением для обеспечения безопасности следующего поколения без ущерба для производительности.Аппаратные усовершенствования, а также алгоритмические и программные инновации помогут добиться прорыва в криптографической производительности множества важных криптографических алгоритмов, используемых в отрасли. Эти инвестиции поддерживают и помогают ускорить переход к новым схемам постквантовой криптографии, которые отрасль будет использовать в ближайшее десятилетие.
Более подробную информацию можно найти в последнем Руководстве разработчика программного обеспечения Intel.
» Нажмите, чтобы увидеть полное изображение Исходный код можно найти по следующим ссылкам: https://github.com/intel/intel-ipsec-mb | https://github.com/intel/isa-l | https://github.com/intel/isa-l_crypto | https://github.com/intel/ipp-crypto/tree/ipp-crypto_2020_update3 | https://github.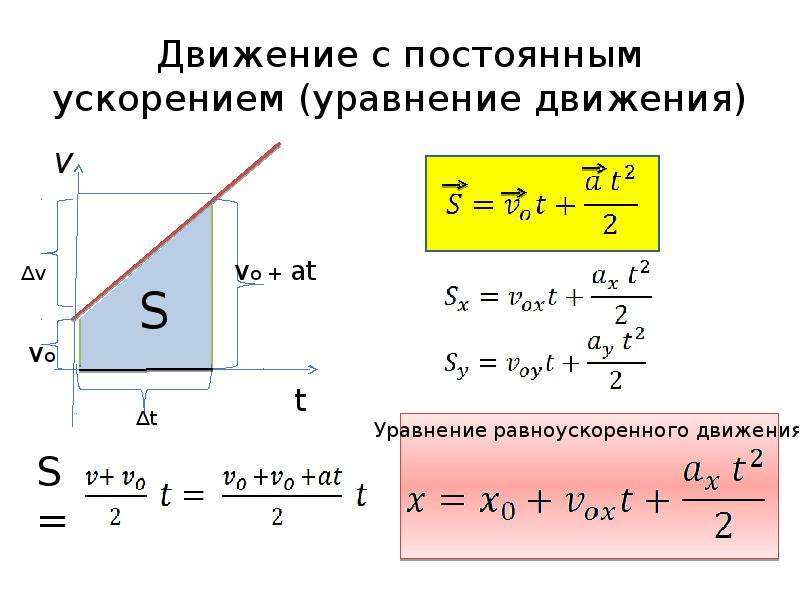 com/intel/QAT_Engine
com/intel/QAT_Engine
Ни один продукт или компонент не может быть абсолютно безопасным.
Производительность зависит от использования, конфигурации и других факторов. Узнайте больше на www.Intel.com/PerformanceIndex.
Путь руки и параметрическое ускорение
Чтобы создать легкую скорость, освобождение головки клюшки руками и предплечьями должно выполняться очень эффективно.
Но дело не только в активации мышц запястий. Хорошая траектория рукоятки создаст силы, которые ускорят головку клюшки и закрутят головку клюшки вокруг рукоятки.
Когда все сделано правильно, дополнительная скорость клюшки действительно зашкаливает по сравнению с тем, что я вижу у среднего игрока в гольф.
Рассмотрим следующую иллюстрацию:
Легко видеть, что расстояния между каждой головкой клюшки увеличиваются, т.е.е. головка клюшки разгоняется до более высокой скорости. Но если вы внимательно присмотритесь, то увидите, что расстояния между рукоятками становятся меньше по мере приближения клюшки к мячу.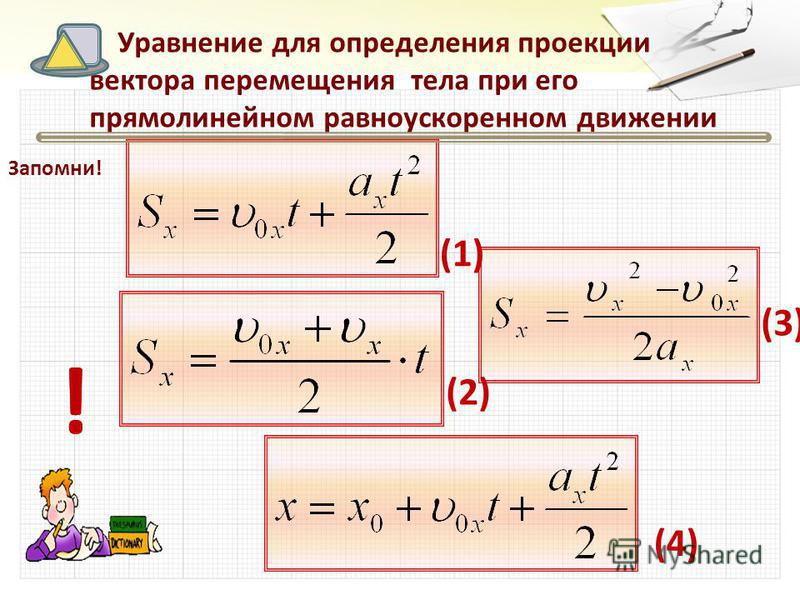
Рукоятка клюшки поднимается вверх и замедляет движение вокруг корпуса. Это то, что называется параметрическим ускорением , создаваемым эффективностью пути ручки.
Вот простой маятник. Попытайтесь представить, что произойдет, если верхушка маятника внезапно потянется вверх, а конец шара опустится к центру.Это создаст дополнительное ускорение. А если верхний конец потянуть вверх И в направлении, противоположном качающемуся мячу? Это «ускорение hons mon!»
Майк Остин был мастером в этом – одна из причин, по которой он мог разгоняться до 150 миль в час с 43-дюймовым водителем. Но он никогда не был в состоянии объяснить это лаконично, на мой взгляд. В своих видеороликах он почти тайно показывает движение руки, но не вдается в него достаточно подробно.
И Майк всегда твердил о важности рук в игре в гольф, которую он часто описывал как «гибкую быстроту», а не «жесткую медлительность».И чтобы быть уверенным в хорошем замахе, который развивает массу скорости, запястья и предплечья невероятно гибки и гибки.
Но это еще не все.
В разделе для участников есть HD-видео, в которых я покажу вам, как добавить параметрическое ускорение в ваши замахи. Это сложно звучащая фраза, но довольно простая для понимания с правильными визуальными эффектами.
Путь: ускорение пути к финансовой свободе: 9781642937015: Маллук, Питер, Роббинс, Тони: Книги
#1 Wall Street Journal Бестселлер!Ускорьте свой путь к финансовой свободе с помощью инструментов, стратегий и мышления, позволяющих управлять деньгами.
Независимо от вашего жизненного этапа и текущего финансового положения, стремление к финансовой свободе действительно можно победить. Путешествие потребует правильных инструментов и стратегий, а также настроя на управление деньгами. Обладая десятилетиями коллективной мудрости и практического опыта, вашими проводниками в этой экспедиции являются Питер Маллук, единственный человек в истории, который три года подряд занимал первое место в рейтинге финансовых консультантов в США по версии Barron’s (2013, 2014, 2015).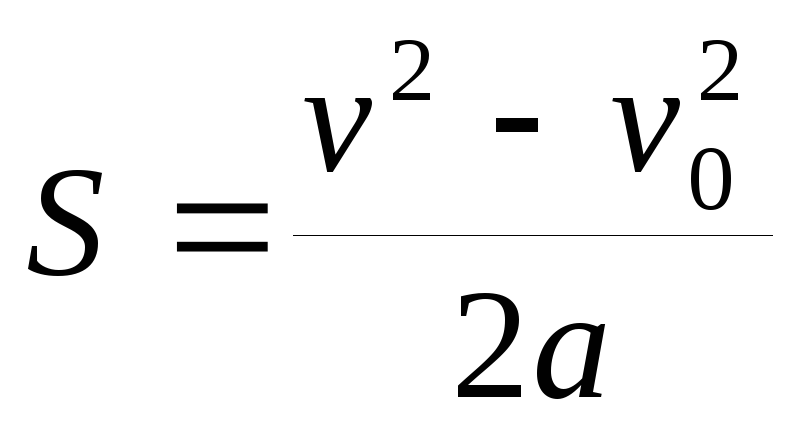 ) и Тони Роббинс, всемирно известный жизненный и бизнес-стратег.Маллук и Роббинс берут кажущуюся пугающей цель финансовой свободы и упрощают ее до пошагового процесса, которого может достичь каждый.
) и Тони Роббинс, всемирно известный жизненный и бизнес-стратег.Маллук и Роббинс берут кажущуюся пугающей цель финансовой свободы и упрощают ее до пошагового процесса, которого может достичь каждый.
Страницы этой книги заполнены реальными историями успеха и жизненно важными уроками, такими как…
• Почему будущее лучше, чем вы думаете, и почему в истории нет лучшего времени для того, чтобы быть инвестором
• Как составить график ваш индивидуальный курс по финансовой безопасности
• Как ведут себя рынки и как обрести душевное спокойствие во время волатильности
• Что индустрия финансовых услуг не хочет, чтобы вы знали
• Как выбрать финансового консультанта, который ставит ваши интересы на первое место
• Как ориентироваться, выбирать или отказываться от многих доступных типов инвестиций
• Успех без удовлетворения — это окончательный провал! Финансовая свобода — это не только деньги, это чувство глубокой удовлетворенности в своем личном путешествии
«Хотите поучительное руководство по управлению деньгами — такое, которое рассказывает все как есть и заставит вас смеяться в процессе? Путешествие Питера Маллука по финансовому миру — это демонстрация силы, которая изменит ваше представление о деньгах. ” —Джонатан Клементс, бывший обозреватель The Wall Street Journal , а в настоящее время член правления и директор по финансовому образованию Creative Planning
” —Джонатан Клементс, бывший обозреватель The Wall Street Journal , а в настоящее время член правления и директор по финансовому образованию Creative Planning
«Роббинс — лучший экономический модератор, с которым я когда-либо работал. Его миссия по донесению идей величайших финансовых умов мира до среднего инвестора действительно вдохновляет». — Алан Гринспен, бывший председатель Федеральной резервной системы
«Тони — это сила природы». — Джек Богл, основатель Vanguard
Ускорение во время полета с двигателем
Ускорение во время полета с двигателем Силы на модели ракеты меняются
резко как по величине, так и по направлению на протяжении типичного
полет.На этом рисунке показаны ускорения ракеты во время работы двигателя.
часть полета после взлета.
Ускорение возникает в ответ на действие Ньютона.
первый закон
движения. чистая внешняя
сила
применяется к ракете.
Во время активной части полета ракета подвергается
силы веса, тяги,
и перетащите.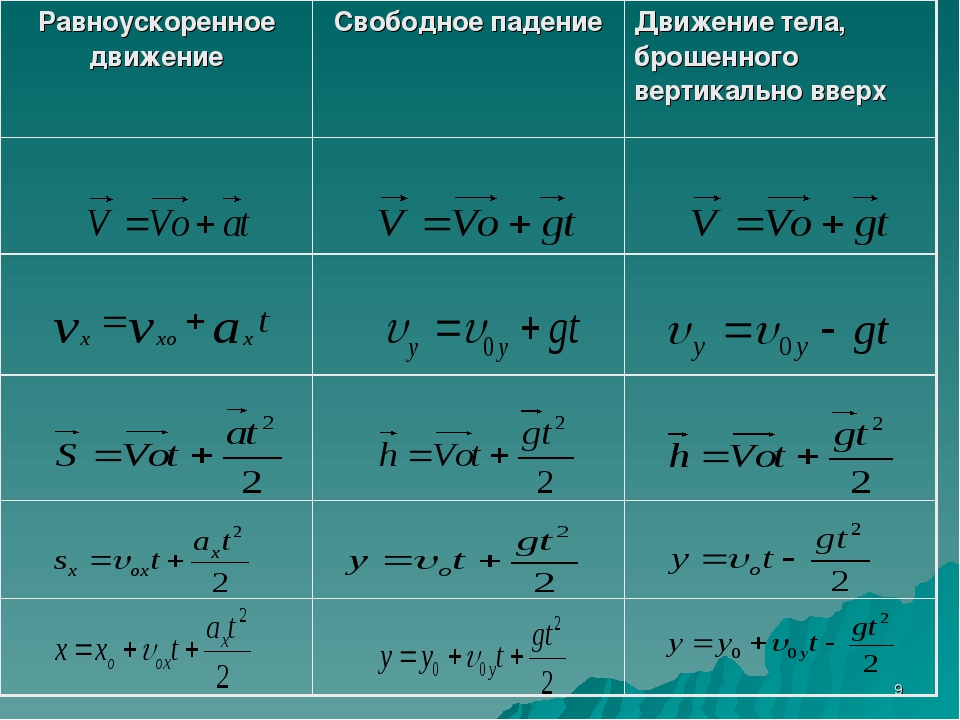
Ускорение модели ракеты с двигателем описывается выражением
Второй закон Ньютона.В общем случае закон Ньютона предписывает, что сила, действующая на объект (F), равна
равно изменению количества движения (масса, умноженная на скорость) в единицу времени.
Если предположить, что масса постоянна, уравнение становится более знакомым
сила равна массе (m), умноженной на ускорение (a). (F = м * а)
Сила и ускорение
являются векторными величинами, имеющими как модуль, так и
направление, в то время как масса является скаляром и имеет только величину. (Математики
будет часто обозначать вектор маленькой стрелкой над символом).Для
модель ракеты,
тяга (Т)
силы сопротивления (D) изменяются со временем (t). Для обозначения
что тяга, сопротивление и, следовательно, ускорение — все функции времени мы включаем символ «(t)» рядом с этими переменными.
Тогда второй закон Ньютона записывается как [F(t) = m * a(t)]. Мы можем использовать
алгебра для решения ускорений: [ a (t) = F (t) / m ].
Под В идеальных условиях траектория полета модели ракеты была бы идеально вертикально.На практике траектория полета наклонен из-за действие ветра. Угол, под которым траектория полета совершает с горизонталью называется углом наклона (б). Если мы рассмотрим силы в вертикальном (v) и горизонтальном (h) направлениях, получаем два уравнения для ускорения; один для вертикали и один для горизонтальный. «cos b» и «sin b» — тригонометрические функции. косинус и синус угла наклона. Вертикальное ускорение определяется следующим уравнением: ( av(t) = ([T(t) – D(t)] * sin b – W ) / m ).Горизонтальное ускорение определяется выражением: (ah(t) = ([T(t) – D(t)] * cos b)/m). Если бы траектория полета была совершенно вертикально, угол наклона будет 90 градусов. То косинус 90 градусов равен нулю, поэтому горизонтальное ускорение будет нуль. Синус 90 градусов равен 1,0, поэтому вертикальное ускорение будет равно тяге минус сопротивление минус вес, деленный на массу.
Чтобы ракета летела как можно выше, нам нужна вертикальная
ускорение должно быть максимально высоким. Учитывая ускорение
уравнений, это говорит нам о том, что мы хотим, чтобы угол наклона был
90 градусов, тяга должна быть высокой, лобовое сопротивление низким, а вес низким.
Все, что мы можем сделать с моделью ракеты, чтобы выполнить
эти четыре цели улучшат характеристики ракеты.
Учитывая ускорение
уравнений, это говорит нам о том, что мы хотим, чтобы угол наклона был
90 градусов, тяга должна быть высокой, лобовое сопротивление низким, а вес низким.
Все, что мы можем сделать с моделью ракеты, чтобы выполнить
эти четыре цели улучшат характеристики ракеты.
Обратите внимание, что для модельной ракеты вес топлива относительно небольшой. к массе всего автомобиля. Итак, при определении ускорения мы можно предположить, что вес (или масса) остается почти постоянным.Это другое от полномасштабной ракеты, в которой топливо составляет большую часть от веса транспортного средства. Изменения веса (массы) пороха должны быть включены в любое определение скорости или ускорения во время полет. Уравнения, показанные на этом слайде, не годятся для полной масштабная ракета.
Наверх
Перейти…
- Домашняя страница руководства для начинающих
от Тома
Бенсон
Пожалуйста, присылайте предложения/исправления по адресу: benson@grc. nasa.gov
nasa.gov
Координаты пути » Spumone
Здесь мы работаем над решением задач динамики с использованием координат пути. Иногда координаты пути называют нормальными и тангенциальными координатами, потому что мы выбираем базисные векторы, нормальные и тангенциальные к пути.
Таблица ссылок
- Теоретическое видео: экспресс-ускорение в координатах пути
- Теоретическое видео: мифическая центробежная сила
- Задача: «Стена смерти»
- Проблема: Динамика петли скейт-парка
- Проблема: динамика сноубордического хафпайпа
Видео: выражение ускорения в координатах пути
Здесь мы частично выводим выражение для ускорения в координатах пути.Перед просмотром видео вы можете вернуться к предыдущим видео об ускорении здесь.
Видео: Мифическая центробежная сила
В этом видео мы используем координаты пути, чтобы обсудить вымышленную силу, которую некоторые люди называют центробежной силой.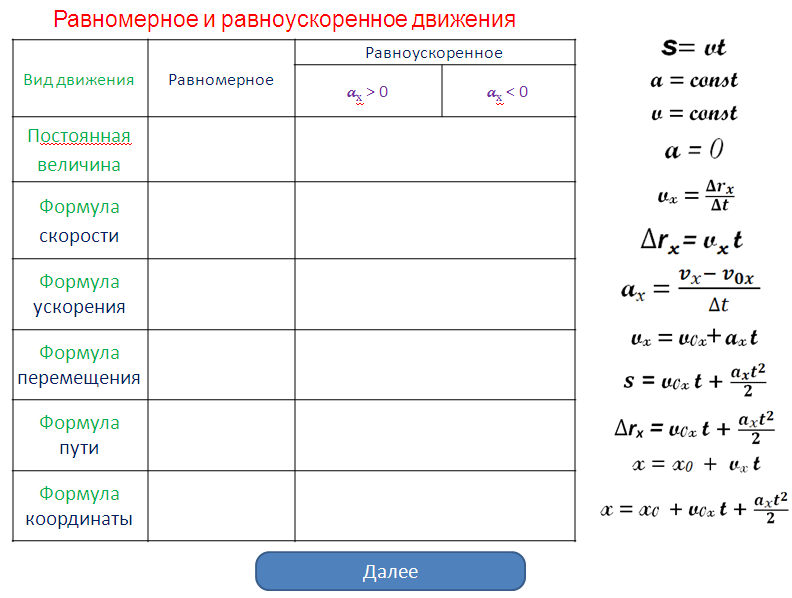
«Стена смерти»
Посмотрите видео ниже, а затем решите следующую проблему:
Здесь представлено письменное решение.Видео решение представлено ниже.
Петля для скейтпарка Dynamics
Рассмотрим следующую задачу:
Вот решение:
FYI: Вот ссылка на ужасное объяснение того, как работает петля американских горок.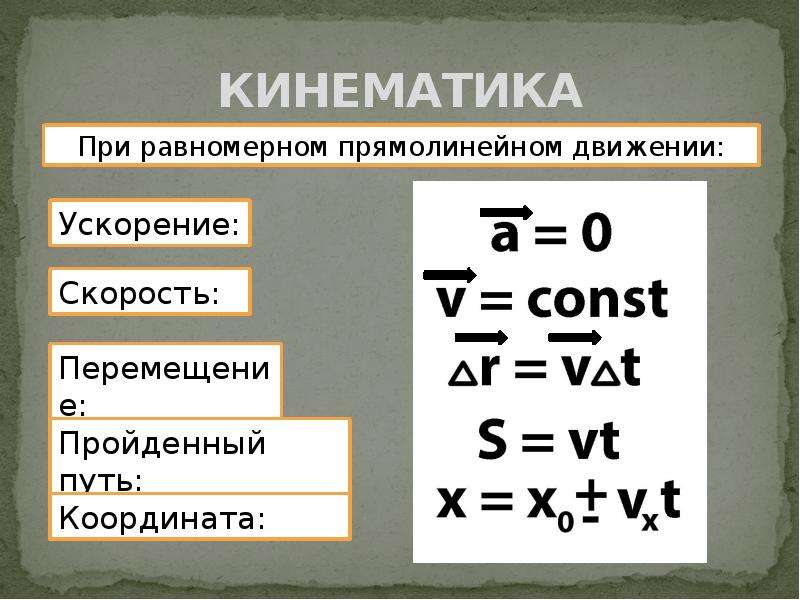 Если вы нажмете на ссылку на биографию автора, вы поймете, почему. У него есть степень бакалавра. на английском языке, без видимой подготовки в области физики, математики или инженерии.
Если вы нажмете на ссылку на биографию автора, вы поймете, почему. У него есть степень бакалавра. на английском языке, без видимой подготовки в области физики, математики или инженерии.
Динамика сноубордического хафпайпа
Рассмотрим следующую задачу:
Здесь представлено письменное решение.
Связанное видео из освещения зимних Олимпийских игр 2014 года встроено ниже. Посмотрите, сможете ли вы найти SpuCraft на заднем плане.
(PDF) Оптимальные по времени траектории и линии ускорения роботов-манипуляторов
.–“‘…..+-
Линии ускорения
VI.ЗАКЛЮЧЕНИЕ
Представлен эвристический метод анализа оптимальных по времени траекторий и
их форм.Метод использует
линии ускорения
для представления направлений максимального ускорения наконечника манипулятора
в координатах рабочего пространства или суставного пространства. Показано, что
неособых
оптимальных по времени путей касаются
линий ускорения
в
конечных точках при условии, что начальная и конечная скорости равны нулю.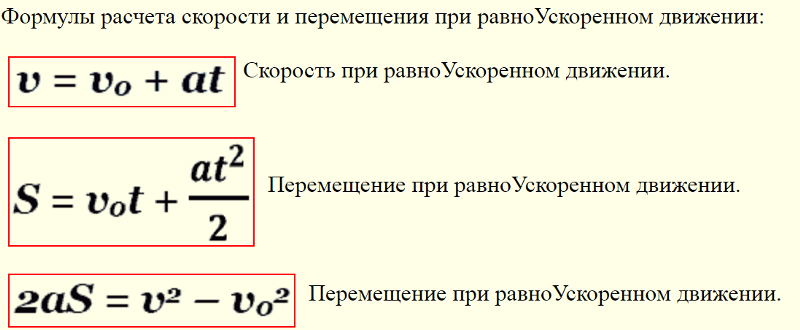
Представлены примеры, демонстрирующие точное соответствие между временными
оптимальными путями и их
линиями ускорения.
Касание времени
оптимальный путь к
линиям ускорения
в конечных точках может
быть
используемым в
существующим методам оптимизации [2,3] в качестве дополнительных граничных условий
90 время и улучшить сходимость.Был представлен прямой метод для почти минимальных путей,
и продемонстрирован для двухзвенного манипулятора. Почти минимальные
пути состоят из B-сплайнов, которые касаются
линий ускорения
в конечных точках.Пути, близкие к минимуму, можно использовать в качестве начальных
условий для более точных процедур оптимизации [2] или для быстрой
оценки конструкций роботизированных ячеек. Имея представление о
возможных формах оптимальных по времени путей, препятствия могут
быть
размещенными на
пути потенциально «хороших путей между рабочими станциями, без фактического получения оптимальных по времени путей
[
141.
VII. БЛАГОДАРНОСТИ
Поддержка этого исследования Отделом автоматизации
Исследовательского центра НАСА в Лэнгли в рамках гранта NAG-1-489 подтверждена
.
VIII. Список литературы
[L] Shiller,
Z.,
“Оптимальное планирование движения для роботизированных
Манипуляторы” Докторская тезис, Институт Массачусетс
из
Технология Cambridge
MA,
Июнь 1987.
[2] Dubowsky,
S.,
NOM, MA, и Shiller,
Z.,
«Время оптимальные
Path Prance
для
роботизированные манипуляторы с препятствием
Убежание: CAD Approach,
“
Proceedings of 1986 IEEE
International Conference on Robotics and Automation, San
Francisco, CA., март 1986.
Geering,
H.,
из
Роботы в
Сборочные задачи», IEEE Transactions on Automatic Control,
Vol.AC-31,
№
6, июнь 1986 г. , стр. 512-518.
, стр. 512-518.
Кан М.Е. и Рот
Б.,
1971, «Близкое к минимуму время
Управление шарнирно-сочлененными кинематическими цепями без обратной связи», Журнал
Dvnamic Svstems. Измерение и контроль, Vol. 93, №
3,
, сентябрь 1971 г., стр. 164–172.
Сахар, Г. и Холлербах, Дж. М., 1985, «Планирование минимальных
временных траекторий для манипуляторов роботов», Proc.IEEE
Междунар.
Конференция по робототехнике и автоматизации, стр. 751-758, St.
Louis, Миссури, март 1985 г. Границы», Рок. of The American
Control Conference, Бостон, Массачусетс, стр. 1248-1252, июнь 1985 г. Манипуляторы»,
Тр.
из
Третье междунар. Симп. of Robotics Research, Gouvieux, France,
October 1985
Fraize
G.,
Vertut J. and Hugon R., 1985, “Coverage
Optimization of Articulated Manipulators”, в
900из
Роботы
и манипуляторы,
стр. 351-361, Kogan
351-361, Kogan
Page, London 1985, MIT Press 1985.
Asada,
,
«Геометрическое представление динамики манипулятора
и его применение к конструкции руки», ASME J. of
Dvnamic Svstems. Измерение и контроль, сентябрь 1983 г., том.
105,
№.
3, стр. 131-135.
[lo] Йошикава, Т., «Динамическая управляемость манипуляторами роботов
». проц. 1985 IEEE Междунар. Конференция по робототехнике
,и автоматизации, Сент-Луис, март 1985 г., стр. 1033-1038.
[ll] Bobrow, J.E., Dubowsky,
S.,
и Gibson,
J.S.,
“Time-
Optimal Control of Robotic Manipulators”, The International
9 4,NO
3, 1985.
[
121 шикер,
121,
Z.,
и Dubowsky,
S.,
“О оптимальных траекториях
для
роботизированных манипуляторов с Приводы и рабочий орган
Ограничения”,
hoc.
I =
I =
International CO & ENCE на робототехнике
и автоматизация, Сент-Луис, Март 1985
[13] Bryson, A.