НОУ ИНТУИТ | Лекция | Разностные уравнения и их решение
Ключевые слова: функция, разность, ПО, запаздывания, коэффициенты, переменная, линейное уравнение, константы, значение, выражение, характеристическое уравнение, многочлен, линейная комбинация, частное решение, целое число, расходы, множитель, отношение
9.1. Уравнения первого и второго порядков
Пусть дана функция . Тогда первая разность y определяется по формуле
| (9.1) |
В отличие от дифференциального исчисления мы не предполагаем, что стремится к нулю. Так как большинство экономических данных собираются через определенные равные промежутки времени, полезно считать, что . Более того, обычно полагают период между наблюдениями нормализованным, т.е. выбирают (один месяц, один квартал, один год). Поэтому первые разности можно записать в виде
Таким же образом сформируем вторую разность как изменение первой разности:
и т.д.
Аналогично определяется разность n-го порядка:
Так как в настоящем учебном пособии в основном рассматриваются линейные модели временных рядов, изучим только один специальный случай линейного разностного уравнения -го порядка с постоянными коэффициентами, а именно уравнение вида
| | (9.2) |
Порядок разностного уравнения задается показателем – максимальной величиной шага запаздывания, или, другими словами, максимальным лагом. Уравнение считается линейным потому, что все значения зависимой переменной y входят в него в первой степени.
Рассмотрим, например, стохастическую версию классической кейнсианской модели, предложенную Самуэльсоном:
| | (9.3) |
где
| – | реальный общий национальный продукт; | |
| – | потребление; | |
| – | инвестиции в момент времени . |
Слагаемые и имеют нулевые средние и объясняют случайные возмущения в потреблении и инвестировании.
Преобразуем кейнсианскую модель производства и потребления (9.3) к виду
| (9.4) |
Уравнение (9.4) выражает как функцию от собственных запаздываний (лагов) и возмущающих членов. Выберем возмущающий процесс в виде
и получим разностное линейное уравнение второго порядка вида (9.2). Отметим, что в уравнении (9.4) отсутствует свободный член, т.е. .
 Например, если – последовательность случайных ошибок наблюдений и , то уравнение (9.2) становится уравнением авторегрессии
Например, если – последовательность случайных ошибок наблюдений и , то уравнение (9.2) становится уравнением авторегрессииПусть . Тогда получаем модель случайного блуждания.
Другой полезный пример дает уравнение
| (9.5) |
Можно проверить, что решением этого разностного уравнения первого порядка является функция
| | (9.6) |
Метод итераций (последовательных приближений). Обозначим известное значение функции в момент времени 0 как . Обратимся к разностному уравнению первого порядка
(9. 7) 7) |
Подставляя в (9.7), получаем:
Тем же путем находим :
Продолжая процесс, найдем :
Для итерации с номером получаем решение уравнения (9.7):
| | (9.8) |
Предположим, что начальное значение неизвестно. Тогда при движении “назад” заменим на итерацию “назад” В результате получаем:
| |
Предполагая, что и сдвигаясь назад на m периодов , получаем: Можно показать, что полученное решение уравнения (9.7) не единственное. Решением уравнения (9.7) при любом будет и выражение
| | (9.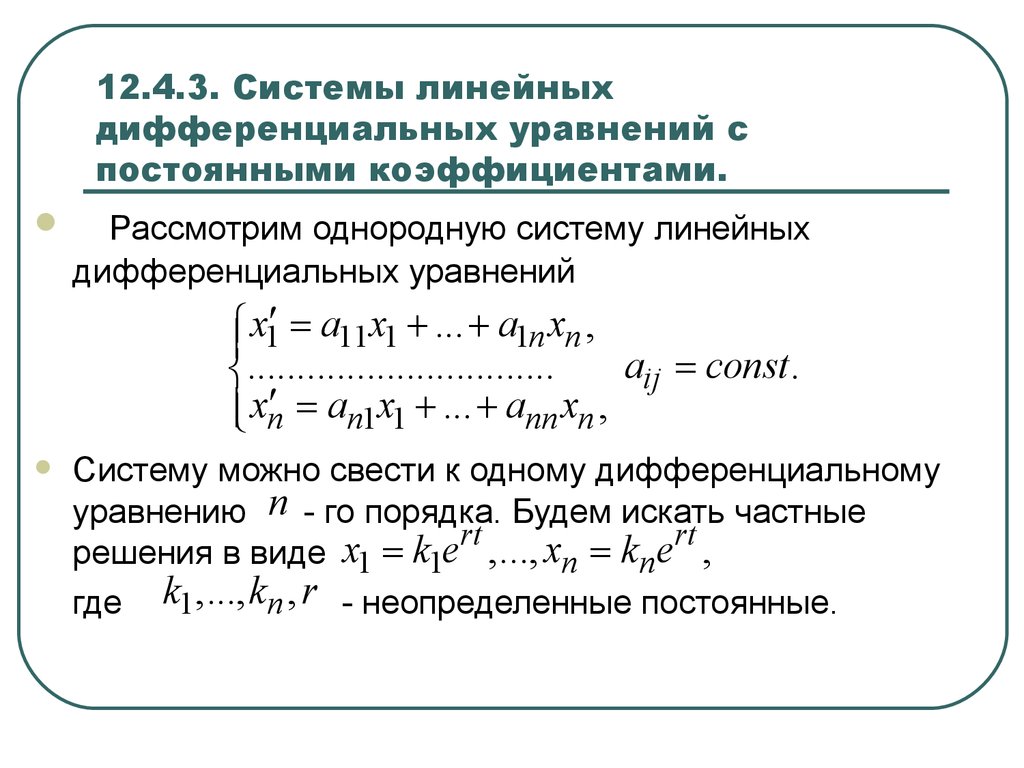 9) 9) |
Выражение (9.9), как и в случае дифференциальных уравнений первого порядка, представляет сумму общего решения однородного разностного уравнения вида (9.2) и частного решения неоднородного уравнения (9.7).
Теперь рассмотрим случай . Тогда движением “назад” получаем решение в виде В отличие от предыдущего случая здесь ошибки не убывают, а накапливаются.
Рассмотрим теперь уравнение второго порядка
| (9.10) |
Будем искать решение уравнения второго порядка в том же виде
Подставляя это выражение в (9.10), получаем
| (9.11) |
 intuit.ru/2010/edi”>Разделив обе части (9.11) на, получим характеристическое уравнение . При решении характеристического уравнения могут возникнуть три случая.
intuit.ru/2010/edi”>Разделив обе части (9.11) на, получим характеристическое уравнение . При решении характеристического уравнения могут возникнуть три случая.
Случай 1. Дискриминант и существуют два действительных различных корня уравнения. Тогда
Если абсолютное значение хотя бы одного из корней или превышает единицу, то однородное решение имеет “взрывной” характер при .
Решение носит “взрывной” характер при . Если , то из-за слагаемого поведение общего решения не так ясно. В итоге решение стремится к нулю, но вначале может носить “взрывной” характер.
Случай 3. Если , то и характеристические корни комплексные. В этом случае однородное решение может быть получено в виде где – произвольные постоянные, а \theta удовлетворяет соотношению Тригонометрическая функция создает волнообразное поведение решения однородного уравнения.
Характеризация условий устойчивости. В случае существования двух корней характеристического уравнения для устойчивости требуется, чтобы оба корня находились внутри промежутка (-1; 1). В случае совпадающих характеристических корней условие устойчивости принимает вид . Для комплексных корней в случае 3 условие устойчивости следующее: -.
Теория и применение цифровой обработки сигналов
Теория и применение цифровой обработки сигналов
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ 1.2. Обзор основных направлений цифровой обработки сигналов 1.3. Построение книги 2.1. Введение 2.2. Последовательности 2.3. Представление произвольных последовательностей 2.4. Линейные системы с постоянными параметрами 2.  5. Физическая реализуемость. Устойчивость 5. Физическая реализуемость. Устойчивость2.6. Разностные уравнения 2.7. Частотная характеристика 2.8. Частотная характеристика систем первого порядка 2.9. Частотная характеристика систем второго порядка 2.10. Дискретный ряд Фурье 2.11. Замечания о единицах измерения частоты 2.12. Соотношение между непрерывными и дискретными системами 2.13. z-преобразование 2.14. Соотношение между z-преобразованием и фурье-преобразованием последовательности 2.15. Обратное z-преобразование 2.16. Свойства z-преобразования 2.17. Решение разностных уравнений с применением одностороннего z-преобразования 2.18. Геометрическая интерпретация преобразования Фурье 2.19. Построение цифровых фильтров (структурные схемы фильтров) 2.20. Структурные схемы фильтров без полюсов 2.21. Дискретное преобразование Фурье 2.22. Свойства ДПФ 2.23. Свертка последовательностей 2.24. Линейная свертка конечных последовательностей 2.25. Секционированные свертки 2.  26. Дискретное преобразование Гильберта 26. Дискретное преобразование Гильберта2.27. Преобразование Гильберта действительных сигналов ГЛАВА 3. ТЕОРИЯ И РАСЧЕТ ЦИФРОВЫХ ФИЛЬТРОВ С ИМПУЛЬСНЫМИ ХАРАКТЕРИСТИКАМИ КОНЕЧНОЙ ДЛИНЫ 3.2. Порядок расчета фильтров 3.3. Свойства КИХ-фильтров 3.4. Характеристики КИХ-фильтров с линейной фазовой характеристикой 3.5. Частотная характеристика КИХ-фильтров с линейной фазой 3.6. Расположение нулей КИХ-фильтров с линейной фазой 3.7. Методы расчета КИХ-фильтров с линейными фазами 3.8. Первый метод расчета — метод взвешивания 3.9. Прямоугольное окно 3.10. «Обобщенное» окно Хэмминга 3.11. Окно Кайзера 3.12. Примеры фильтров нижних частот с различными окнами 3.13. Особенности использования метода взвешивания 3.14. Несколько практических приемов использования окон 3.15. Дополнительные примеры фильтров рассчитанных методом взвешивания 3.16. Общая характеристика окон 3.17. Второй метод проектирования — метод частотной выборки 3. 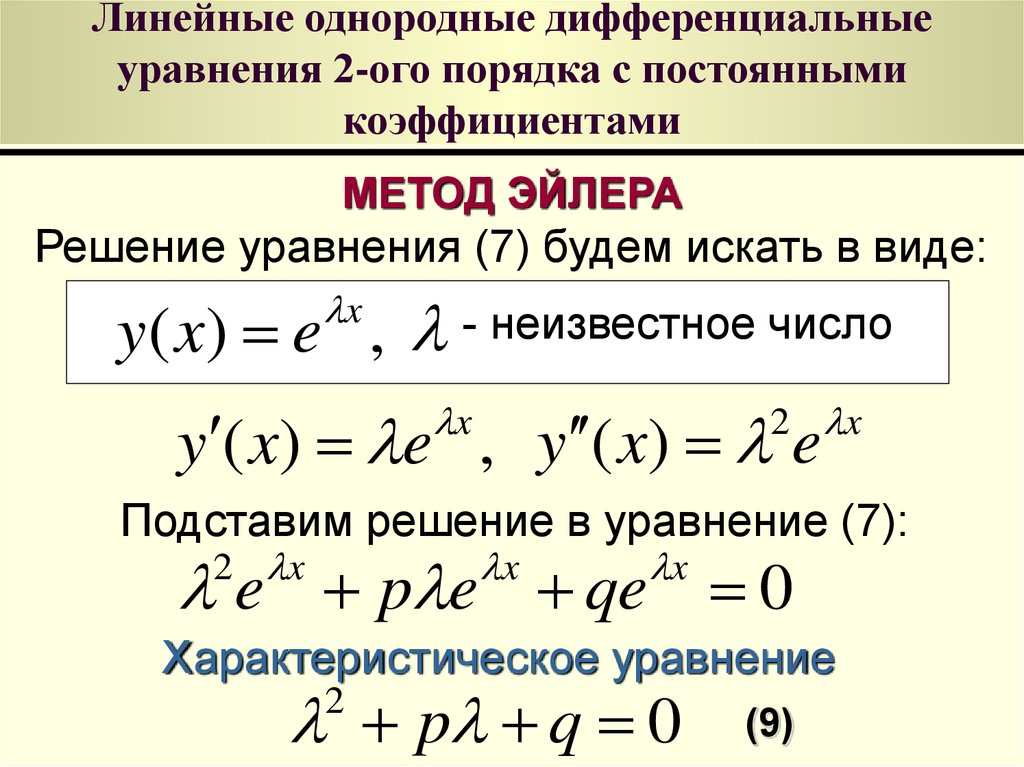 18. Решение задачи оптимизации 18. Решение задачи оптимизации3.19. Линейное программирование 3.20. Фильтры с частотной выборкой вида 1 и 2 3.21. Фильтры вида 1 с частотной выборкой и линейной фазой 3.22. Фильтры вида 2 с частотной выборкой и линейной фазой 3.23. Некоторые самые общие результаты расчета фильтров методом частотной выборки 3.24. Заключение к описанию метода частотной выборки 3.25. Третий метод проектирования — проектирование оптимальных фильтров с минимаксной ошибкой 3.26. Аппроксимация по Чебышеву со взвешиванием 3.27. Ограничение на число экстремумов частотной характеристики фильтра с линейной фазой 3.28. Решение нелинейных уравнений для КИХ-фильтров с максимумом пульсаций 3.29. Расчет КИХ-фильтров с максимумом пульсаций на основе полиномиальной интерполяции 3.30. Использование алгоритма замены Ремеза для расчета оптимальных фильтров 3.31. Расчет оптимальных КИХ-фильтров методами линейного программирования 3.32. Характеристики оптимальных фильтров нижних частот вида 1 3.  33. Некоторые дополнительные свойства оптимальных фильтров нижних частот вида 1 33. Некоторые дополнительные свойства оптимальных фильтров нижних частот вида 13.34. Соотношения между параметрами оптимального фильтра нижних частот 3.35. Свойства оптимальных фильтров нижних частот вида 2 3.36. Характеристики оптимальных дифференциаторов 3.37. Характеристики оптимальных преобразователей Гильберта 3.38. Многополосные оптимальные КИХ-фильтры 3.39. Расчет фильтров при одновременном ограничении и во временной, и в частотной областях 3.40. Непосредственное сравнение различных КИХ-фильтров нижних частот Приложение Глава 4. ТЕОРИЯ И АППРОКСИМАЦИЯ ЦИФРОВЫХ ФИЛЬТРОВ С БЕСКОНЕЧНЫМИ ИМПУЛЬСНЫМИ ХАРАКТЕРИСТИКАМИ 4.2. Элементарные свойства БИХ-фильтров: квадрат амплитудной характеристики, фазовая характеристика, характеристика групповой задержки 4.3. Методы расчета коэффициентов БИХ-фильтра 4.4. Расчет цифровых фильтров по фильтрам непрерывного времени 4.5. Метод отображения дифференциалов 4.6. Метод инвариантного преобразования импульсной характеристики 4. 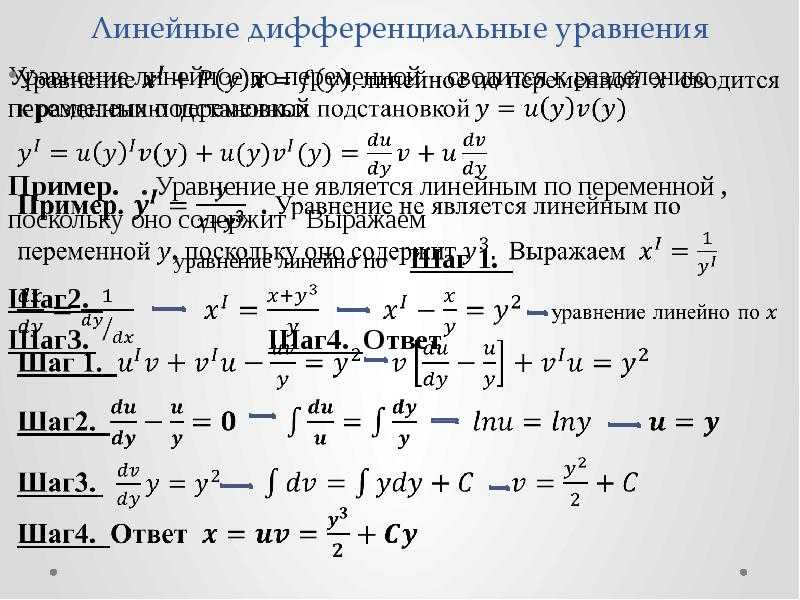 7. Билинейное z-преобразование 7. Билинейное z-преобразование4.8. Согласованное z-преобразование 4.9. Обзор методов расчета аналоговых фильтров нижних частот 4.10. Расчетные диаграммы фильтров нижних частот 4.11. Сравнение методов инвариантного преобразования импульсной характеристики и билинейного преобразования для эллиптических фильтров 4.12. Частотные преобразования 4.13. Прямые методы расчета цифровых фильтров 4.14. Применение методов оптимизации для расчета БИХ-фильтров 4.15. Обзор методов расчета БИХ-фильтров 4.16. Сравнение КИХ- и БИХ-фильтров 4.17. Сравнение оптимальных КИХ-фильтров и эллиптических фильтров с выравниванием групповой задержки Глава 5. ЭФФЕКТЫ КОНЕЧНОЙ РАЗРЯДНОСТИ ЧИСЕЛ В ЦИФРОВЫХ ФИЛЬТРАХ 5.2. Аналого-цифровое преобразование 5.3. Цифро-аналоговое преобразование 5.4. Системы счисления, применяемые в цифровых устройствах 5.5. Система счисления с фиксированной запятой 5.6. Системы счисления с плавающей запятой 5.7. Система счисления с поблочно плавающей запятой 5.  8. Виды квантования в цифровых фильтрах 8. Виды квантования в цифровых фильтрах5.9. Усечение 5.10. Округление 5.11. Шум округления в рекурсивных структурах с фиксированной запятой 5.12. Ограничение динамического диапазона в системах с фиксированной запятой 5.13. Ограничение динамического диапазона при построении фильтров в прямой форме 5.14. Ограничение динамического диапазона при построении фильтров в параллельной форме 5.15. Ограничение динамического диапазона при построении фильтров в каскадной форме 5.16. Упорядочение размещения блоков и попарный подбор нулей и полюсов блоков при построении фильтра в каскадной форме 5.17. Выводы относительно взаимосвязи между динамическим диапазоном и уровнем шума округления 5.18. Дополнительные замечания о взаимосвязи между динамическим диапазоном и уровнем шума округления 5.19. Шум округления в нерекурсивных структурах с фиксированной запятой 5.20. Шум округления при построении нерекурсивных фильтров в прямой форме 5.21. Шум округления при построении нерекурсивных фильтров в каскадной форме 5. 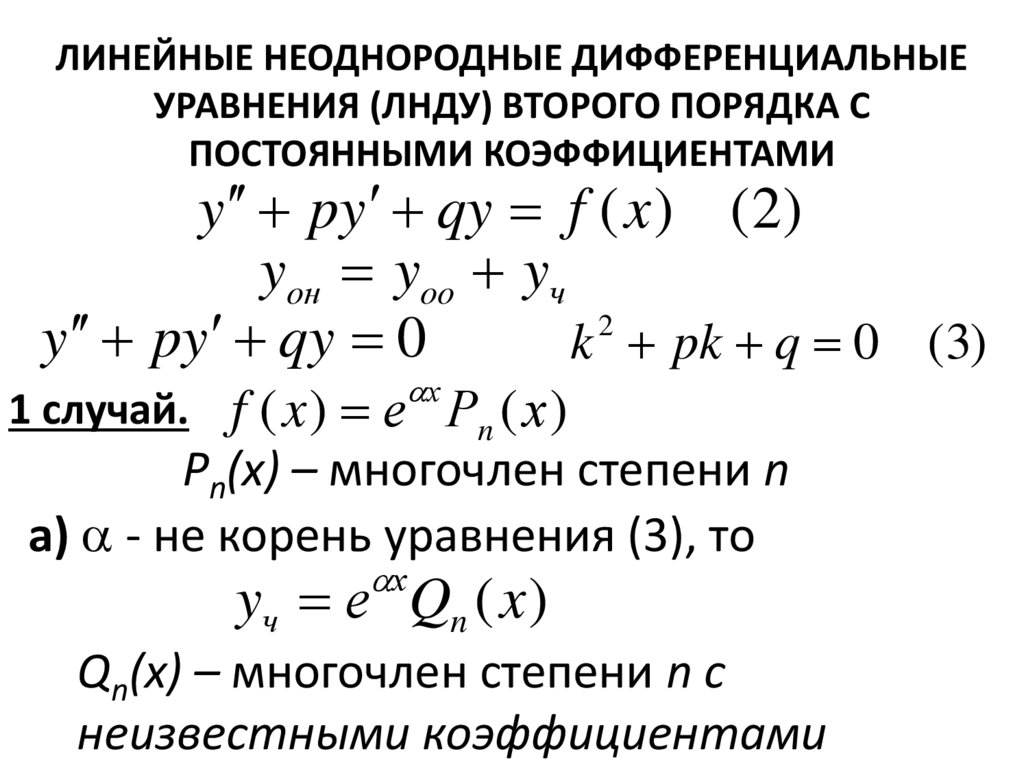 22. Шум округления в рекурсивных структурах с плавающей запятой 22. Шум округления в рекурсивных структурах с плавающей запятой5.23. Квантование коэффициентов 5.24. Квантование коэффициентов в рекурсивных структурах 5.25. Квантование коэффициентов при построении фильтров в прямой форме 5.26. Экспериментальная проверка шумовой модели квантования коэффициентов 5.27. Оптимальное квантование коэффициентов 5.28. Квантование коэффициентов в двухполюсном фильтре 5.29. Квантование коэффициентов в нерекурсивных структурах 5.30. Квантование коэффициентов при построении КИХ-фильтров 5.31. Квантование коэффициентов при построении КИХ-фильтров в каскадной форме 5.32. Колебания предельного цикла Глава 6. СПЕКТРАЛЬНЫЙ АНАЛИЗ И БЫСТРОЕ ПРЕОБРАЗОВАНИЕ ФУРЬЕ 6.2. Введение в алгоритмы БПФ с основанием 2 6.3. Некоторые свойства алгоритма БПФ с основанием 2 и прореживанием по времени 6.4. Перестановка данных и двоичная инверсия 6.5. Программа расчета БПФ на ФОРТРАНе 6.6. Алгоритм БПФ с прореживанием по частоте 6. 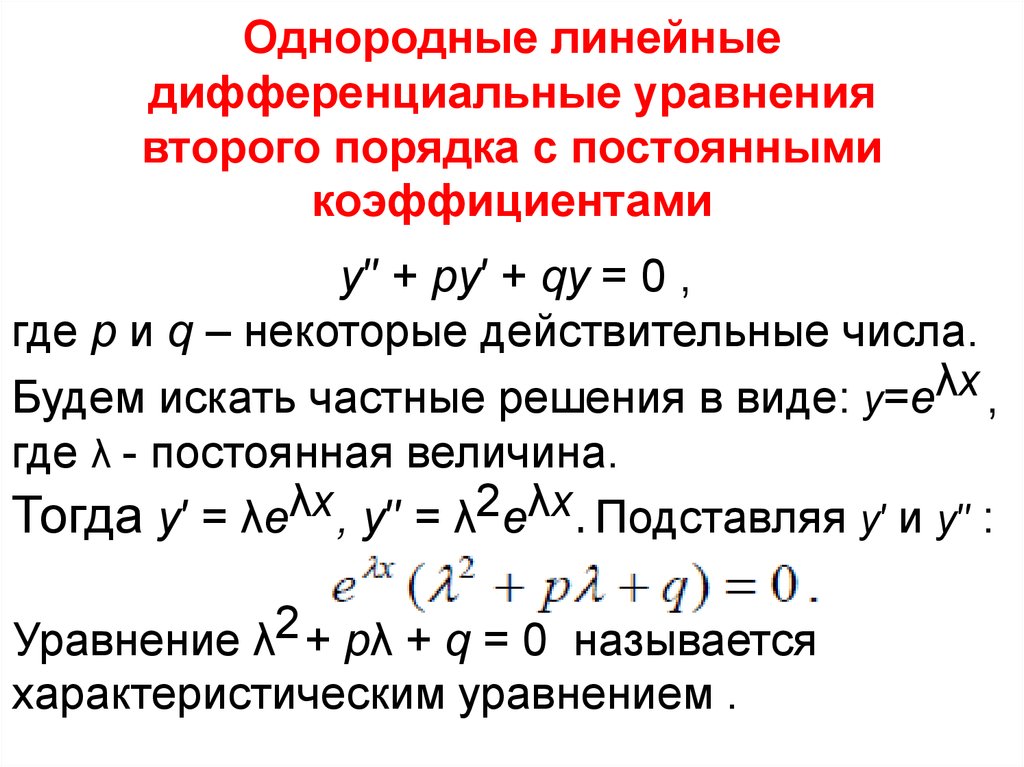 7. Вычисление обратного ДПФ с помощью алгоритма прямого ДПФ 7. Вычисление обратного ДПФ с помощью алгоритма прямого ДПФ6.8. Единый подход к алгоритмам БПФ 6.9. Алгоритмы БПФ с основанием 2 6.10. Спектральный анализ в одной точке z-плоскости 6.11. Спектральный анализ с применением БПФ 6.12. Некоторые характеристики спектрального анализа 6.13. Соотношение между «скачущим» БПФ и гребенкой фильтров 6.14. Использование окон при спектральном анализе 6.15. Измерение спектра в ограниченном секторе z-плоскости с использованием БПФ 6.16. Алгоритм Блюстейна 6.17. Алгоритм z-преобразования с использованием ЛЧМ-фильтрации 6.18. Энергетический спектр случайных сигналов 6.19. Свертка и корреляция с использованием теоретико-числовых преобразований ПРИЛОЖЕНИЕ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ДЛЯ БПФ Глава 7. ВВЕДЕНИЕ В ТЕОРИЮ ДВУМЕРНОЙ ОБРАБОТКИ СИГНАЛОВ 7.2. Двумерные сигналы 7.3. Двумерные системы 7.4. Физическая реализуемость. Разделимость. Устойчивость 7.5. Двумерные разностные уравнения 7.6. Частотные методы 7.  7. Двумерное z-преобразование 7. Двумерное z-преобразование7.8. Конечные последовательности 7.9. Свертка последовательностей 7.10. Двумерное ДПФ 7.11. Расчет двумерных фильтров 7.12. БИХ-фильтры 7.13. Устойчивость БИХ-фильтров 7.14. КИХ-фильтры 7.15. Двумерные весовые функции (окна) 7.16. Пример расчета фильтра нижних частот методом взвешивания 7.17. Фильтры с частотной выборкой 7.18. Двумерные фильтры нижних частот с частотной выборкой 7.19. Расчет оптимальных (в минимаксном смысле) двумерных фильтров 7.20. Частотное преобразование одномерных фильтров в двумерные 7.21. Примеры обработки изображений Глава 8. ВВЕДЕНИЕ В ЦИФРОВУЮ ТЕХНИКУ 8.2. Некоторые вопросы проектирования аппаратуры цифровой обработки сигналов 8.3. Булева алгебра. Примеры простых логических цепей 8.4. Основные типы интегральных логических схем 8.5. Серийные логические ИС: вентили, коммутаторы и дешифраторы, триггеры, арифметические и запоминающие устройства 8.6. Умножители 8.  7. Делители и устройства с плавающей запятой 7. Делители и устройства с плавающей запятой8.8. Пример: проектирование быстродействующего матричного умножителя 8.9. Заключение ГЛАВА 9. СПЕЦИАЛИЗИРОВАННЫЕ УСТРОЙСТВА ДЛЯ ЦИФРОВОЙ ФИЛЬТРАЦИИ И ГЕНЕРАЦИИ СИГНАЛОВ 9.2. Аппаратурное построение КИХ-фильтра прямой формы 9.3. Параллелизм при построении КИХ-фильтров прямой формы 9.4. Каскадная форма КИХ-фильтра 9.5. Прямая форма КИХ-фильтра с высоким уровнем параллелизма 9.6. Прямая форма построения БИХ-фильтров 9.7. Каскадная форма БИХ-фильтров 9.8. Мультиплексирование 9.9. Цифровой приемник клавишно-тонального вызова 9.10. Цифровой преобразователь временного разделения каналов в частотное разделение каналов 9.11. Расчленение цифровых фильтров на составные части при построении их на интегральных микросхемах 9.12. Специализированный цифровой синтезатор частот 9.13. Методы генерации псевдослучайных чисел 9.14. Методы генерации гауссовых случайных чисел Глава 10. СПЕЦИАЛИЗИРОВАННЫЕ УСТРОЙСТВА ДЛЯ ВЫПОЛНЕНИЯ БПФ 10.  2. Обзор теоретических основ БПФ 2. Обзор теоретических основ БПФ10.3. Нумерация при БПФ. Двоичная инверсия и разрядная инверсия для алгоритмов БПФ с постоянным основанием 10.5. Эффекты квантования в алгоритмах БПФ 10.6. Особенности аппаратурной реализации БПФ с основанием 2 10.7. Оптимальная аппаратурная реализация алгоритма БПФ с основанием 2 10.9. Выполнение БПФ с использованием сверхоперативной памяти 10.10. Параллельные структуры для алгоритмов БПФ с основаниями 2 и 4, использующие ЗУ с произвольным доступом 10.11. Общие вопросы построения поточных схем БПФ 10.12. Поточные схемы БПФ с основанием 2 10.13. Поточная схема БПФ с основанием 4 10.14. Сравнение поточных схем БПФ с основаниями 2 и 4 10.15. Структуры БПФ с повышенным уровнем параллелизма 10.16. Общие принципы построения специализированных процессоров БПФ 10.17. БПФ перекрывающихся массивов на основе ЗУ с произвольным доступом 10.18. Свертка в реальном времени методом БПФ с использованием одного АУ и ЗУ с произвольным доступом 10.  19. Поточный свертыватель с тактовой частотой 10 МГц 19. Поточный свертыватель с тактовой частотой 10 МГцГлава 11. УНИВЕРСАЛЬНЫЕ УСТРОЙСТВА В СИСТЕМАХ ОБРАБОТКИ СИГНАЛОВ 11.2. Специализированные и универсальные вычислительные машины 11.3. Способы описания вычислительных машин 11.4. Программа вычисления скользящей суммы 11.5. Особенности ввода — вывода при обработке в реальном времени 11.6. Методы увеличения быстродействия вычислительной машины 11.7. Сверхоперативные ЗУ 11.8. Распараллеливание арифметических операций 11.9. Параллельная работа ЗУ, АУ, устройств управления и вызова команд 11.10. Быстродействующий цифровой процессор (FDP) Линкольновской лаборатории 11.11. Структурные схемы арифметических устройств 11.12. Синхронизация 11.13. Обзор методов увеличения быстродействия, использованных в FDP 11.14. Выполнение быстрого преобразования Фурье с помощью FDP 11.15. Подпрограммы для действий с плавающей запятой 11.16. Обзор особенностей FDP, связанных с распараллеливанием 11.  17. Процессор Линкольновской лаборатории LSP (Lincoln Signal Processor 2) для обработки сигналов 17. Процессор Линкольновской лаборатории LSP (Lincoln Signal Processor 2) для обработки сигналов11.18. Лабораторная вычислительная система для цифровой обработки сигналов ГЛАВА 12. ЦИФРОВАЯ ОБРАБОТКА РЕЧЕВЫХ СИГНАЛОВ 12.2. Модель образования речи 12.3. Кратковременный спектральный анализ 12.4. Система анализа-синтеза речи, основанная на кратковременном спектральном анализе 12.5. Особенности анализа речи 12.6. Система анализа — синтеза 12.7. Полосный вокодер 12.8. Анализаторы вокодеров. Особенности обработки сигналов 12.9. Синтезаторы вокодеров. Особенности обработки сигналов 12.10. Другие схемы вокодеров 12.11. Выделение высоты основного тона и обнаружение тон — шум 12.12. Обнаружитель тон — шум 12.13. Гомоморфная обработка речи 12.14. Гомоморфный вокодер 12.15. Формантный синтез 12.16. Цепь возбуждения звонких фрикативных звуков 12.17. Генератор случайных чисел 12.18. Цифровая обработка в формантном синтезаторе 12.  19. Линейное прогнозирование речи 19. Линейное прогнозирование речи12.20. Система речевого ответа для вычислительной машины 12.21. Заключение 13.1. Вводные замечания о принципах радиолокации и ее применениях 13.2. Состав и параметры радиолокационной системы 13.3. Выбор сигналов и функция неопределенности 13.4. Цифровые согласованные фильтры для радиолокационных сигналов 13.5. Аэродромный обзорный радиолокатор системы управления полетами. Доплеровская фильтрация как средство подавления мешающих отражений 13.6. Экспериментальный радиолокатор дальнего действия 13.7. Цифровой согласованный фильтр для высококачественного радиолокатора 13.8. Заключение |
 Рассмотрены теория, способы выполнения и применения алгоритмов быстрого преобразования Фурье. Отдельные главы посвящены вопросам проектирования специализированных устройств цифровой обработки и применению цифровых методов для анализа речевых и радиолокационных сигналов. Книга содержит большое количество справочного материала, а также тексты программ для расчета типовых цифровых устройств.
Рассмотрены теория, способы выполнения и применения алгоритмов быстрого преобразования Фурье. Отдельные главы посвящены вопросам проектирования специализированных устройств цифровой обработки и применению цифровых методов для анализа речевых и радиолокационных сигналов. Книга содержит большое количество справочного материала, а также тексты программ для расчета типовых цифровых устройств.
2.1: Разностные уравнения — Математика LibreTexts
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 379
- Ларри Грин
- Общественный колледж Лейк-Тахо
Дифференциальное уравнение отлично подходит для моделирования ситуаций, когда существует постоянно меняющаяся совокупность или значение. Если изменение происходит постепенно, а не непрерывно, то дифференциальные уравнения имеют свои недостатки. Вместо этого мы будем использовать разностные уравнения, которые представляют собой рекурсивно определяемые последовательности. Примеры постепенных изменений включают популяцию лосося, когда лосось нерестится один раз в год, проценты, начисляемые ежемесячно, и сезонные предприятия, такие как горнолыжные курорты.
Если изменение происходит постепенно, а не непрерывно, то дифференциальные уравнения имеют свои недостатки. Вместо этого мы будем использовать разностные уравнения, которые представляют собой рекурсивно определяемые последовательности. Примеры постепенных изменений включают популяцию лосося, когда лосось нерестится один раз в год, проценты, начисляемые ежемесячно, и сезонные предприятия, такие как горнолыжные курорты.
Определение: Разностное уравнение первого порядка
Разностное уравнение первого порядка представляет собой рекурсивно определенную последовательность в форме
\[y_{n+1} = f(n,y_n) \;\;\; n=0,1,2,\точки . \]
Что делает этот первый порядок, так это то, что нам нужно знать только самое последнее предыдущее значение, чтобы найти следующее значение. Это также происходит из дифференциального уравнения
\[ y’ = g(n,y(n)). \]
Вспоминая предельное определение производной, это можно записать как 9п (у_0). \]
Решения конечно-разностного уравнения с
\[y_{n+1} = y_n. \]
\]
Называются равновесными растворами . Находим их, установив
\[ y_n = f(n,y_n) . \]
Уравнение в конечных разностях называется линейным , если \(f(n,y_n)\) является линейной функцией \(y_n\).
Каждый год в ручье зарыбляется 1000 лососей, и вероятность того, что лосось выживет и вернется в ручей в следующем году, составляет 30 %. Сколько лосося будет ежегодно попадаться на крючок и какова будет его популяция в очень отдаленном будущем? 9ny_0 .\]
Вспомним уравнение логистики
\[ y’ = ry \left (1 – \dfrac{y}{K} \right ) . \]
После некоторой работы его можно смоделировать с помощью конечно-разностного логистического уравнения
\[ u_{n+1} = ru_n(1 – u_n). \]
Равновесие можно найти, решив
\[ u_n = ru_n(1 – u_n). \]
Квадратное уравнение, имеющее решение
\[ u_n = 0 или u_n = \frac{r – 1}{r}. \]
Чтобы определить устойчивость точек равновесия, посмотрите на значения \(u_n\), очень близкие к равновесному значению. 2 \), поэтому уравнение логистики может быть аппроксимировано 92\ок ру_н. \]
2 \), поэтому уравнение логистики может быть аппроксимировано 92\ок ру_н. \]
Для \(|r| < 1\) это сходится к 0, поэтому точка равновесия устойчива.
Для другого равновесного значения напишите
\[ u_n = \frac{r – 1}{r} + v_n . \]
Таким образом, равновесное значение становится равным
\[ v_n = 0 .\]
Теперь мы можем подставить в разностное уравнение и отсечь нелинейный член, чтобы получить
\[ v_{n+1} = ( 2 – р)в_н. \]
Это сходится к 0 для
\[|2 – r| < 1\]
или
\[1 < r < 3.\]
Таким образом, точка равновесия устойчива в этом диапазоне.
При \(r = 1\) мы говорим, что имеет место обмен стабильности . При \(r > 3\) последовательность ведет себя странно. В частности, при \(3 Эта страница под названием 2.1: Difference Equations распространяется по незаявленной лицензии, автором, ремиксом и/или куратором которой является Ларри Грин. Авторы и авторство
Разностное уравнение | Британика
В этих видеороликах Британника объясняет различные темы и отвечает на часто задаваемые вопросы.
Посмотрите эти ретро-видео из архивов Encyclopedia Britannica.
В Demystified у Britannica есть все ответы на ваши животрепещущие вопросы.
В #WTFact Britannica делится некоторыми из самых странных фактов, которые мы можем найти.
В этих видеороликах узнайте, что произошло в этом месяце (или любом другом месяце!) в истории.
Britannica — это главный ресурс для учащихся по ключевым школьным предметам, таким как история, государственное управление, литература и т. д.
Хотя этот глобальный кризис в области здравоохранения продолжает развиваться, может быть полезно обратиться к прошлым пандемиям, чтобы лучше понять, как реагировать сегодня.
Britannica празднует столетие Девятнадцатой поправки, выделяя суфражисток и политиков, творящих историю.