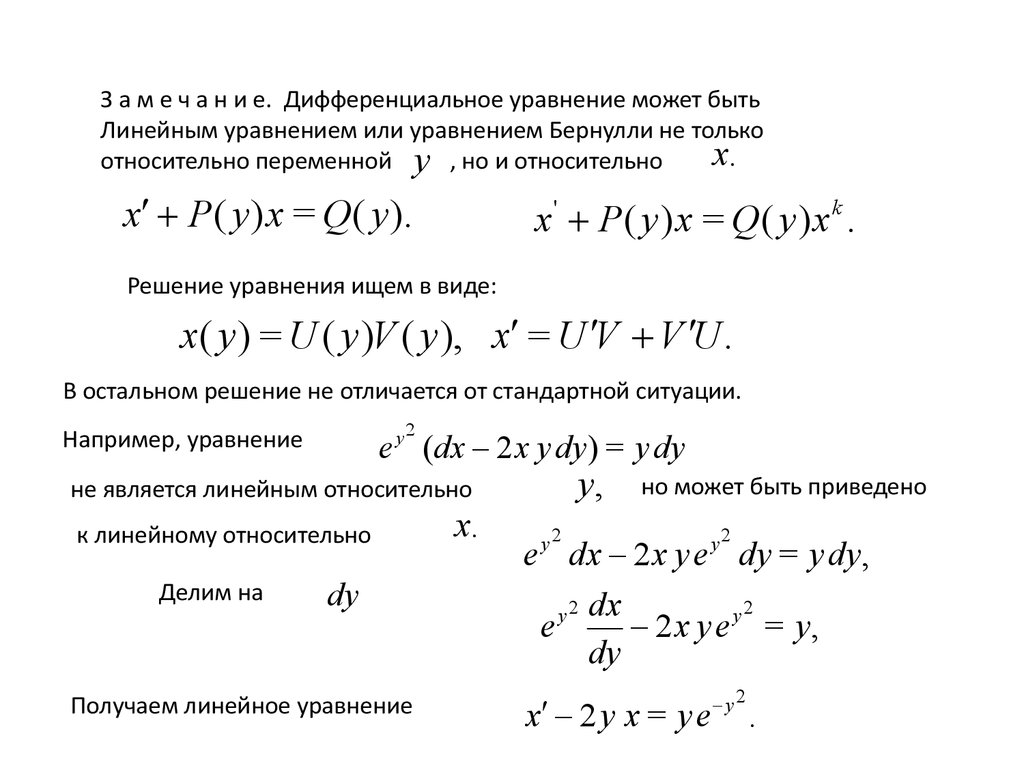
Линейные дифференциальные уравнения первого порядка
Уравнение первого порядка видаa1(x)y' + a0(x)y = b(x) называется линейным дифференциальным уравнением. Если b(x) ≡ 0 то уравнение называется однородным, в противном случае – неоднородным. Для линейного дифференциального уравнения теорема существования и единственности имеет более конкретный вид.
Назначение сервиса. Онлайн калькулятор можно использовать для проверки решения однородных и неоднородных линейных дифференциальных уравнений вида y'+y=b(x).
- Решение онлайн
- Видеоинструкция
=
Использовать замену переменных y=u*vИспользовать метод вариации произвольной постоянной
Находить частное решение при y() = .
Для получения решения исходное выражение необходимо привести к виду: a1(x)y' + a. Например, для
Например, для y'-exp(x)=2*y это будет y'-2*y=exp(x).
Теорема. Пусть a1(x), a0(x), b(x) непрерывны на отрезке [α,β], a1≠0 для ∀x∈[α,β]. Тогда для любой точки (x0, y0), x0∈[α,β], существует единственное решение уравнения, удовлетворяющее условию y(x0) = y0 и определенное на всем интервале [α,β].
Рассмотрим однородное линейное дифференциальное уравнение a1(x)y'+a0(x)y=0.
Разделяя переменные, получаем , или, интегрируя обе части, Последнее соотношение, с учетом обозначения exp(x) = e
Попытаемся теперь найти решение уравнения в указанном виде, в котором вместо константы C подставлена функция C(x) то есть в виде
Подставив это решение в исходное, после необходимых преобразований получаем Интегрируя последнее, имеем
где C1– некоторая новая константа.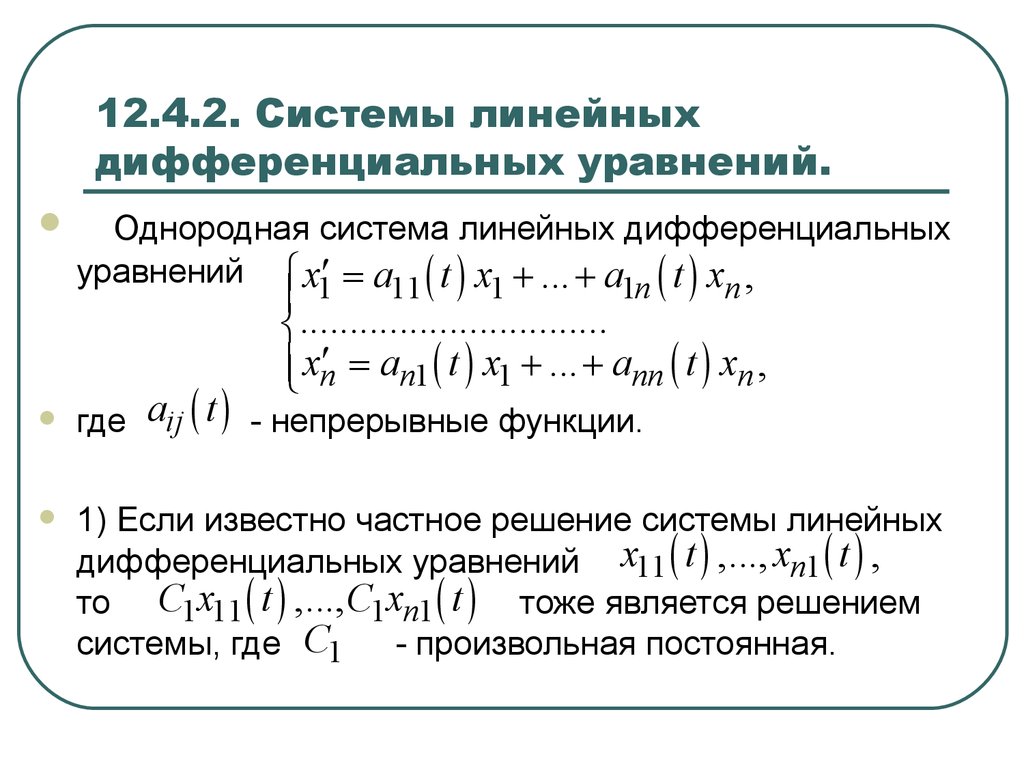 Подставляя полученное выражение для C(x), окончательно получаем решение исходного линейного уравнения
Подставляя полученное выражение для C(x), окончательно получаем решение исходного линейного уравнения
.
Описанный метод решения называется
Пример. Решить уравнение y' + 2y = 4x. Рассмотрим соответствующее однородное уравнение y' + 2y = 0. Решая его, получаем y = Ce-2x. Ищем теперь решение исходного уравнения в виде y = C(x)e-2x. Подставляя y и y’ = C'(x)e-2x – 2C(x)e-2x
в исходное уравнение, имеем C'(x) = 4xe2x, откуда C(x) = 2xe2x – e2x + C В этом решении y1(x) = 2x-1 – движение
объекта под действием силы b(x) = 4x, y2(x) = C1e-2x -собственное движение объекта.
В этом решении y1(x) = 2x-1 – движение
объекта под действием силы b(x) = 4x, y2(x) = C1e-2x -собственное движение объекта.
Пример №2. Найти общее решение дифференциального уравнения первого порядка y’+3 y tan(3x)=2 cos(3x)/sin22x.
Это неоднородное уравнение. Сделаем замену переменных: y=u•v, y’ = u’v + uv’.
Решение состоит из двух этапов:
1. u(3v tg(3x)+v’) = 0
2. u’v = 2cos(3x)/sin22x
1. Приравниваем u=0, находим решение для 3v tg(3x)+v’ = 0
Представим в виде: v’ = -3v tg(3x)
Интегирируя, получаем:
ln(v) = ln(cos(3x))
v = cos(3x)
2. Зная v, Находим u из условия: u’v = 2cos(3x)/sin22x
u’ cos(3x) = 2cos(3x)/sin22x
u’ = 2/sin22x
Интегирируя, получаем:
Из условия y=u•v, получаем:
y = u•v = (C-cos(2x)/sin(2x)) cos(3x) или y = C cos(3x)-cos(2x) ctg(3x)
Простейшие линейные дифференциальные уравнения
9.
 1Линейное и нелинейное: кто матери-теории более ценен?
1Линейное и нелинейное: кто матери-теории более ценен?Все счастливые семьи похожи друг на друга, каждая несчастливая семья несчастлива по-своему. Л. Н. Толстой, «Анна Каренина».
В предыдущей главе мы выяснили, что все неособые точки похожи друг на друга: подходящей заменой координат векторное поле в окрестности любой неособой точки превращается в постоянное поле. Однако особые точки бывают особыми по-своему. Нашей целью теперь является изучение особых точек.
Вообще говоря, изучение особых точек произвольных векторных полей — сложная задача. Однако, великая наука матанализ учит нас: сложное нелинейное становится простым и линейным, если посмотреть на него в микроскоп. Поэтому изучение линейного — первый шаг на пути к познанию нелинейного.
Если мы хотим понять, как ведёт себя функция одной переменной вблизи некоторой точки, мы вычислим производную функции в этой точке, приблизим график функции графиком касательной (линейной частью) и скажем, что её поведение близко к поведению её линейной части. Скажем, если производная положительна, линейная часть возрастает, а значит и сама функция возрастает.
Скажем, если производная положительна, линейная часть возрастает, а значит и сама функция возрастает.
Аналогичный подход работает и в дифференциальных уравнениях.
9.1.1Мотивирующий пример: изучение постоянного решения одномерного уравнения
Рассмотрим уравнение
˙x=f(t,x),x∈R1,f(t,0)≡0(9.1)
Иными словами, это произвольное неавтономное уравнение на прямой, обладающее одним характерным свойством: правая часть обнуляется при x=0 и произвольном t.
Рассмотрим функцию x=φ(t;x0), задающую решение уравнения (9.1) с начальным условием x(t0)=φ(t0;x0)=x0. Очевидно, φ(t;0)≡0: тождественно нулевая функция является единственным решением с нулевым начальным условием. (Если бы уравнение было автономным, мы бы сказали, что 0 является особой точкой; в данном случае уравнение неавтономное и такой термин мы использовать не можем, хотя это и близкий сюжет.)
Пусть теперь нам интересно, как ведут себя решения с начальными условиями,
близкими к нулевому.
Рис. 9.1: Различное поведение решений, близких к нулевому
Итак, нас интересует поведение решения с начальным условием x(t0)=x0 при x0 близком к нулю. Будем считать, что на интересующем нас промежутке времени решение убежит от нуля не слишком сильно. В этом случае можно считать, что
f(t,x)≈f′x(t,0)x.(9.2)
Это следует из определения частной производной функции f по переменной x и
того факта, что f(t,0)=0 для всех t. (Мы просто зафиксировали t и стали
смотреть на функцию f(t,x) как на функцию только от аргумента x, приблизив
её график соответствующей касательной.)
(Мы просто зафиксировали t и стали
смотреть на функцию f(t,x) как на функцию только от аргумента x, приблизив
её график соответствующей касательной.)
Пользуясь этим соотношением, заменим в уравнении (9.1) правую часть на f′x(t,0)x. Поскольку правая часть меняется «не слишком сильно» вблизи прямой x=0, разумно ожидать, что и решения, проходящие близко к нулю, от этого «не слишком сильно» изменятся. Однако, чтобы всё-таки помнить о том, что перед нами новое уравнение, связанные с исходным лишь приближёнными равенствами, заменим обозначение для неизвестной функции: вместо x будем писать y. Имеем:
˙y=f′x(t,0)y.(9.3)
Получившееся уравнение гораздо проще исходного и его можно решить явно: это
уравнение с разделяющимися переменными. Действительно, функция f′x(t,0) зависит только от t и мы мгновенно получаем:
dydt=f′x(t,0)ydyy=f′x(t,0)dt∫yy0dξξ=∫tt0f′x(τ,0)dτln(y/y0)=∫tt0f′x(τ,0)dτy=y0exp∫tt0f′x(τ,0)dτ(9.4)(9.5)(9.6)(9.7)(9.8)
Получающееся решение y(t) является приближением к решению исходного уравнения.
Уравнение (9.3) является не просто уравнением с разделяющимися переменными. Оно является линейным уравнением — и, как говорят, линеаризацией уравнения (9.1) вблизи решения x≡0.
9.1.2Более строгое обоснование возможности линеаризации
Этот параграф можно смело пропустить и сразу перейти к следующему разделу. Он содержит более аккуратное обоснование связи между уравнениями (9.1) и (9.3). Для дальнейшего нам пока это не понадобится.
Зафиксируем какое-нибудь t1>t0. Нас интересует отображение, которое ставит в соответствие точке x0 точку φ(t1;x0). Точнее, нас интересует, как эта функция ведёт себя при x0 близких к нулю.
В одномерном случае ответ на вопрос «как ведёт себя функция в точке» даётся производной этой функцией в данной точке. Её-то мы и хотим найти.
Будем действовать смело и решительно. Пусть
y(t)=∂φ(t;x0)∂x0∣∣∣x0=0
Вопрос 1. Чему равно y(t0)?
Ответим на более сложный вопрос: что вы можете сказать про знак y(t1)? Очевидно, y(t1)>0, поскольку φ(t1;x0) является возрастающей по x0. Действительно, если предположить, что существуют точки x20>x10 такие, что φ(t1;x20)<φ(t1;x10), по теореме о промежуточном значении найдётся такая точка t∗∈(t0,t1), что φ(t∗;x20)=φ(t∗,x10) (см. рис. 9.2). А это бы противоречило теореме существования и единственности решения дифференциального уравнения.
Рис. 9.2: Так не бывает: интегральные кривые не умеют пересекаться
Найдём уравнение на производную y по t (получим так называемое уравнение в вариациях в его простейшей форме):
˙y=ddt∂φ(t;x0)∂x0∣∣∣x0=0=(∂∂x0dφ(t;x0)dt)∣∣ ∣∣x0=0=(∂∂x0f(φ(t;x0),t))∣∣∣x0=0=(∂f∂x)∣∣∣x=0∂φ(t;x0)∂x0∣∣∣x0=0=f′x(0,t)y(t)
Обоснованность смены порядка дифференцирования мы сейчас обсуждать не будем (хотя вообще это надо сделать). Записанное уравнение называется уравнением в вариациях по начальному условию.
Записанное уравнение называется уравнением в вариациях по начальному условию.
Получается, что уравнение на производную по начальному условию имеет вид
˙y=a(t)y
Как мы узнаем чуть ниже, это пример простейшего линейного уравнения.
9.2Понятие линейного дифференциального уравнения
Бывают линейные дифференциальные операторы. Это такая штука, которая действует на функциях, содержит какие-то там производные и ко всему прочему линейная. Вместо того, чтобы давать строгое определение, приведём несколько примеров.
Пример 1. Пусть φ:R→R — некоторая дифференцируемая функция.
- (Dφ)(t)=ddtφ(t) — простейший линейный
дифференциальный оператор (это просто оператор дифференцирования, он
линеен, поскольку дифференцирование линейно: производная сумма равна
сумме производных, константу можно выносить за знак
дифференцирования). Можно написать, что D=ddt.
- (Dφ)(t)=ddtφ(t)−a(t)φ(t) — также линейный дифференциальный оператор. Можно написать, что D=ddt−a, подразумевая, что a — это оператор умножения на функцию a.
- (Sφ)(t)=ddtφ(t)+a(t) не является линейным оператором. (Почему?)
- (Hφ)(t)=ddtφ(t)+φ2(t) также не является линейным оператором. (Почему?)
Пусть теперь φ:R→Rn — некоторая дифференцируемая вектор-функция
Тогда (Dφ)(t)=dφ(t)dt−Aφ(t) — линейный дифференциальный оператор (здесь A — некоторый фиксированный линейный оператор A:Rn→Rn).
Определение 1.Однородное линейное дифференциальное уравнение — это уравнение вида
Dx=0,(9.9)
где D — некоторый линейный дифференциальный оператор.
Неоднородное линейное дифференциальное уравнение — это уравнение вида
Dx=b(t).(9.10)
Как подсказывает нам мотивирующий пример, чтобы исследовать линеаризацию решения надо исследовать линейные дифференциальные уравнения. Этим мы и займёмся.
Этим мы и займёмся.
9.2.1Простейшие свойства линейных уравнений
Для начала сформулируем две простые теоремы о линейных уравнениях. Вообще-то это теоремы из линейной алгебры: они не используют ничего, кроме линейности.
Теорема 1. Множество всех решений автономного линейного дифференциального уравнения — линейное пространство.
Доказательство. Нам нужно доказать, что 1) сумма решений является решением; 2) умноженное решение на число — тоже решение. Пусть x и y — решения, λ — константа. Тогда D(x+y)=Dx+Dy=0+0=0. То есть сумма решений является решением. Аналогично с константой: D(λx)=λDx=0.∎
Теорема 2. Множество всех решений неавтономного линейного дифференциального уравнения — аффинное пространство — то есть линейное, сдвинутое на фиксированный вектор.
Более точно: для любого дифференциального уравнения
(9.10) найдётся такое частное решение x∗(t), что
любое другое решение этого уравнения представляется в виде x∗(t)+x0(t),
где x0(t) — некоторое решение соответствующего однородного уравнения
(9. 9). (По правде говоря, в качестве частного решения
можно взять любое решение неоднородного уравнения.)
9). (По правде говоря, в качестве частного решения
можно взять любое решение неоднородного уравнения.)
Доказательство. Пусть x1(t) — фиксированное решение, x2(t) какое-то другое решение. Пусть x0=x2−x1. Тогда D(x0)=D(x2−x1)=D(x2)−D(x1)=b−b=0. Таким образом, x0 — решение однородного уравнения, и любое решение x2 представляется в виде суммы x1 и какого-то решения однородного уравнения x0.
Наоборот, если x0 — решение однородного уравнения, то прибавляя его к решению x1 неоднородного уравнения получим какое-то другое решение неоднородного уравнения. ∎
9.2.2Как решать неоднородные уравнения: метод вариации постоянных
Сейчас мы будем делать то, что нельзя: менять постоянные.
Пусть x(t)∈R. Рассмотрим уравнение
˙x−a(t)x=b(t)
Это уравнение называется линейным неоднородным дифференциальным уравнением первого порядка в размерности 1 с переменными коэффициентами («первого порядка» потому что участвует только первая производная).
Как его решить? Решим сперва соответствующее однородное уравнение
˙x−a(t)x=0
Его решение, как мы уже сказали, такое:
x0(t)=Ce∫tt0a(s)ds
Скажем теперь, что C — не константа, а функция от времени. И подставим функцию
x(t)=C(t)e∫tt0a(s)ds
в исходное уравнение.
Получается:
˙Ce∫tt0a(s)ds+Ca(t)e∫tt0a(s)ds=a(t)Ce∫tt0a(s)ds+b(t)
Два слагаемых магическим образом сокращаются, и получается уже простое уравнение на C:
˙C=b(t)e−∫tt0a(s)ds
решая его, имеем:
C(t)=∫tt0b(h)e−∫hh0a(s)dsdh+C0
Вопрос 2. Что будет, если попытаться применить метод вариации постоянных к нелинейному уравнению — например, ˙x=x2+t?
← Предыдущая глава Следующая глава →
Линейное дифференциальное уравнение – формула, вывод, примеры
Линейное дифференциальное уравнение – это уравнение, имеющее переменную, производную от этой переменной и несколько других функций. Стандартная форма линейного дифференциального уравнения — dy/dx + Py = Q, и оно содержит переменную y и ее производные. P и Q в этом дифференциальном уравнении являются либо числовыми константами, либо функциями x.
Стандартная форма линейного дифференциального уравнения — dy/dx + Py = Q, и оно содержит переменную y и ее производные. P и Q в этом дифференциальном уравнении являются либо числовыми константами, либо функциями x.
Линейное дифференциальное уравнение в важной форме дифференциального уравнения, которое можно решить с помощью формулы. Давайте узнаем формулу и вывод, чтобы найти общее решение линейного дифференциального уравнения.
| 1. | Что такое линейное дифференциальное уравнение? |
| 2. | Вывод решения линейного дифференциального уравнения |
| 3. | Формула общего решения линейного дифференциального уравнения |
| 4. | шагов для решения линейного дифференциального уравнения |
| 5. | Примеры линейного дифференциального уравнения |
| 6. | Практические вопросы |
7. | Часто задаваемые вопросы о линейных дифференциальных уравнениях |
Что такое линейное дифференциальное уравнение?
Линейное дифференциальное уравнение имеет вид dy/dx + Py = Q, где P и Q — числовые константы или функции относительно x. Он состоит из y и производной от y. Дифференциал представляет собой дифференцирование первого порядка и называется линейным дифференциальным уравнением первого порядка.
Это линейное дифференциальное уравнение находится в y. Точно так же мы можем написать линейное дифференциальное уравнение и относительно x. Линейное дифференциальное уравнение относительно x: dx/dy + \(P_1\)x = \(Q_1\).
Некоторые примеры линейного дифференциального уравнения относительно y: dy/dx + y = Cosx, dy/dx + (-2y)/x = x 2 .e -x . А примерами линейного дифференциального уравнения относительно x являются dx/dy + x = Siny, dx/dy + x/y = ey. dx/dy + x/(ylogy) = 1/y.
Вывод решения линейного дифференциального уравнения
Вывод общего решения линейного дифференциального уравнения можно понять с помощью следующей последовательности шагов. Дифференциальное уравнение первого порядка имеет вид.
Дифференциальное уравнение первого порядка имеет вид.
dy/dx +Px = Q
Здесь мы умножаем обе части уравнения на функцию x, скажем, g(x) . Далее эта функция выбирается так, чтобы правая часть уравнения была производной от y.g(x). d/dx(y.g(x)) = y.g(x).
g(x).dy/dx + P.g(x).y = Q.g(x)
Выберите g(x) таким образом, чтобы правая часть стала производной от y.g(x).
g(x).dy/dx + P.g(x)y = d/dx(y.g(x)]
Правая часть приведенного выше выражения получена с использованием формулы производной для произведения функций
g(x).dy/dx + P.g(x).y = g(x).dy/dx + y.g'(x)
P.g(x) = g'(x)
P = g’ (x)/g(x)
Интегрируя обе части по x, получаем
\(\int P.dx= \int \frac{g'(x)}{g(x)}.dx\ )
\(\int P.dx= log(g(x))\) 9{\int P.dx}.dx) + C\)
Приведенное выше выражение является общим решением линейного дифференциального уравнения.
Формула общего решения линейного дифференциального уравнения
Ниже приведены две важные формулы для нахождения общего решения линейных дифференциальных уравнений. {\int P.dx}\).
{\int P.dx}\).
Использование описанных выше шагов можно лучше понять с помощью приведенных ниже примеров решения линейного дифференциального уравнения.
Похожие темы
- Исчисление
- Формулы интегрирования
- Формулы дифференцирования и интегрирования
- Цепное правило Формула
- Дифференциальные уравнения
Часто задаваемые вопросы о линейном дифференциальном уравнении
Что такое линейное дифференциальное уравнение?
Линейное дифференциальное уравнение — это уравнение, имеющее переменную, производную от этой переменной и несколько других функций. Стандартная форма линейного дифференциального уравнения — dy/dx + Py = Q, и оно содержит переменную y и ее производные. P и Q в этом дифференциальном уравнении являются либо числовыми константами, либо функциями x.
Как узнать, является ли дифференциальное уравнение линейным дифференциальным уравнением?
Дифференциальное уравнение называется линейным дифференциальным уравнением, если оно имеет переменную и первую производную. Линейное дифференциальное уравнение относительно у имеет вид dy/dx + Py = Q. Здесь у нас есть переменная у, первая производная от переменной у, и у нас есть Р, Q, которые являются функциями от х. От имени линейных эти дифференциальные уравнения имеют только производные первой степени.
9{\int P.dx}\). Наконец, решение линейного дифференциального уравнения имеет вид \(y(I.F) = \int(Q × I.F).dx + C\)Какова стандартная форма линейного дифференциального уравнения относительно x?
Стандартная форма линейного дифференциального уравнения относительно x: dx/dy + Px = Q. Это дифференциальное уравнение, имеющее переменную x, первую производную x и P, Q представляют функции относительно y. Линейное дифференциальное уравнение относительно x имеет производную первого порядка от x.
Какая формула общего решения линейного дифференциального уравнения 93x(t)=\cos t. \end{собрать*} Хотя это ОДУ нелинейно по независимой переменной $t$, оно все же считается линейным ОДУ, поскольку нас интересует только зависимость уравнения от $x$ и его производной. Как вы увидите, мы легко справляемся с нелинейностями в $t$. Такие нелинейности могут приводить к интегралам, которые невозможно вычислить аналитически, но мы будем считать дифференциальное уравнение «решенным», если мы можем записать $x(t)$ как выражение, содержащее только интегралы от функций $t$.
92. \label{ode1}\тег{1} \конец{собрать} Добавление этого маленького члена могло бы показаться безобидным, но оно разрушило идеальную ситуацию, которая была у нас с предыдущим уравнением. Правая часть по-прежнему является функцией только $t$, но левая часть больше не является производной с относительно $t$. Мы не можем просто интегрировать левую часть, так как мы не уметь считать \начать{собирать*} \int \left(\diff{x}{t} + x(t)\right)dt. \end{собрать*}
\end{собрать*}Если бы мы могли каким-то образом вернуть левую часть в производную выражения относительно $t$ (при сохранении правой части функцией только $t$), мы могли бы восстановить идеальную ситуацию более раннее уравнение и мог решить ОДУ, интегрируя по $t$.
Весь фокус в том, чтобы найти способ превратить $\diff{x}{t} + x(t)$ в
производная от некоторого выражения. Член $x(t)$ просто не является производной
любой алгебраической функции от $x(t)$. Тем не менее, правило произведения полезно.
инструмент в этой ситуации, так как в производной продукта,
каждый фактор остается нетронутым в одном из терминов. Если мы умножим $x(t)$
на некоторый множитель $\mu(t)$ и продифференцируем, получим
\начать{выравнивать*}
\ diff {}{ t} (\ mu (t) x (t)) = \ mu (t) \ diff {x} {t} + \ diff {\ mu} {t} x (t).
\конец{выравнивание*}
Это выглядит ближе к тому, что нам нужно. В самом деле, если мы умножим
обе стороны от ОДУ \eqref{ode1} на $\mu(t)$, ОДУ становится
\начать{собирать}
\mu(t)\diff{x}{t} + \mu(t)x(t)=\mu(t)t^2.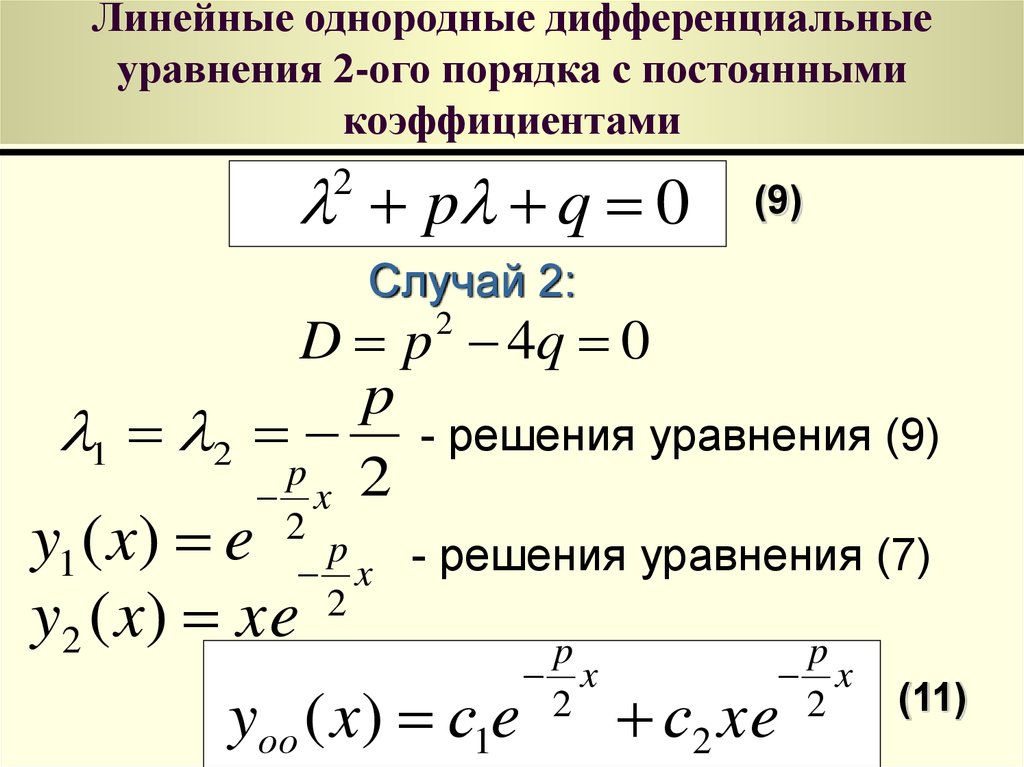 \label{multmu1}\тег{2}
\конец{собрать}
\label{multmu1}\тег{2}
\конец{собрать}
Мы так близки к тому, чтобы превратить левую часть в производную произведения. Если только коэффициент при $x(t)$ был $\diff{\mu}{t}$, а не $\mu(t)$! Тогда левая часть уравнения \eqref{multmu1} действительно будет производной от $\mu(t)x(t)$, и мы могли бы решить ОДУ интегрированием.
К счастью, мы вольны выбирать любой $\mu(t)$, какой захотим. Почему нет выбрать $\mu(t)$, чтобы все работало идеально? Мы могли бы позволить $\mu(t)$ — функция, позволяющая заменить $\mu(t)$ на $\diff{\mu}{t}$. Другими словами, мы могли бы позволить $\mu(t)$ быть решением ОДУ \начать{собирать} \diff{\mu}{t} = \mu(t). \метка{odemu1}\тег{3} \конец{собрать} 92. \end{собрать*}
Сразу видно, что нам не нужна константа интегрирования $C_1$, так как мы можем отменить ее в обеих частях уравнения.
Причина, по которой $C_1$ не имеет значения, заключается в том, что нам просто нужен любой множитель $\mu(t)$
которое удовлетворяет уравнению \eqref{odemu1}, чтобы сделать левую руку
часть уравнения \eqref{multmu1} — производная от $\mu(t)x(t)$.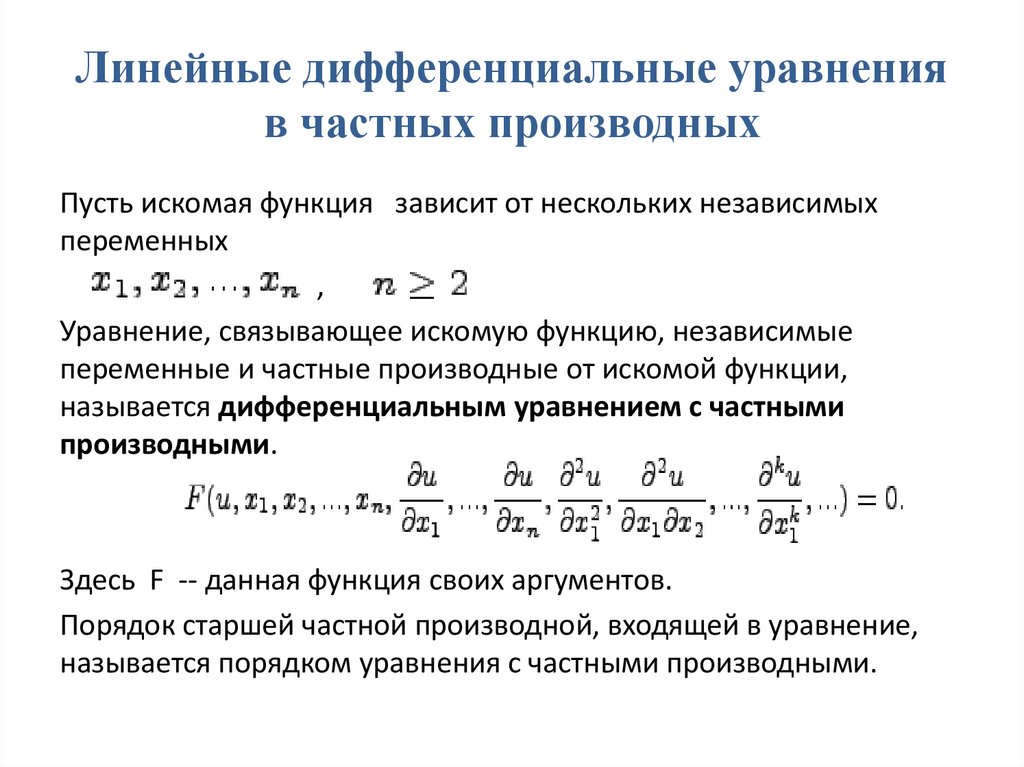 t.$$ 92.
\конец{выравнивание*}
Решение удовлетворяет уравнению \eqref{ode1}.
t.$$ 92.
\конец{выравнивание*}
Решение удовлетворяет уравнению \eqref{ode1}.
Поскольку умножение ОДУ на множитель $\mu(t)$ позволило проинтегрировать уравнения, мы ссылаемся на $\mu(t)$ как на интегрирующий множитель .
Общее линейное ОДУ первого порядка
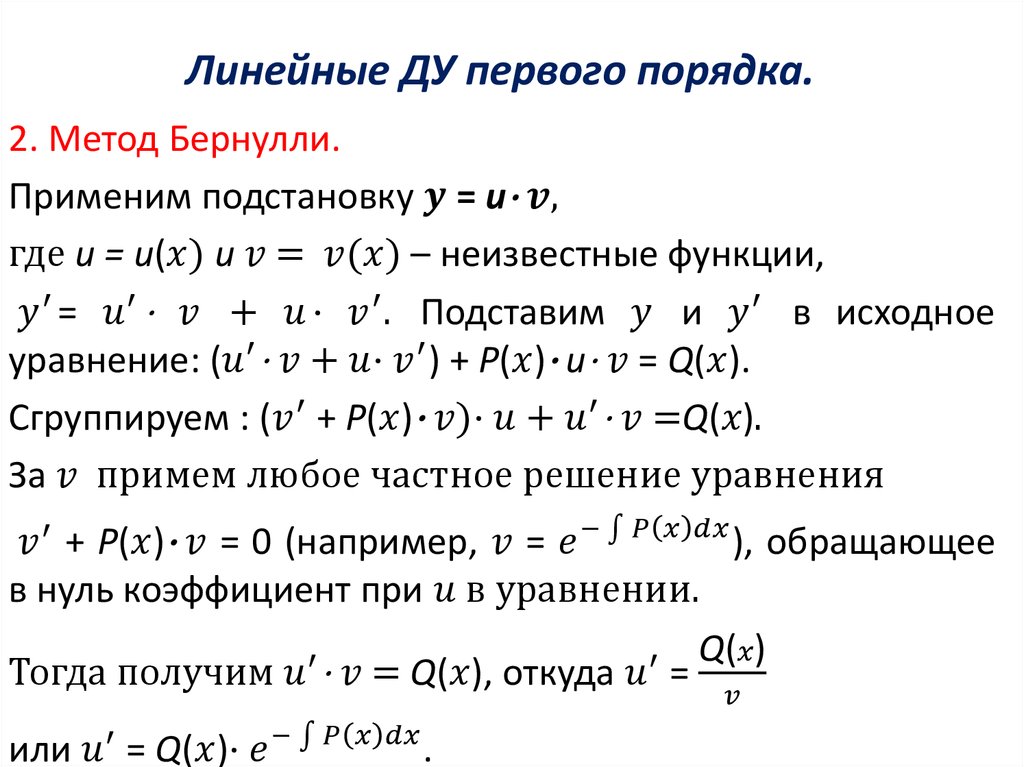
Мы можем использовать интегрирующий множитель $\mu(t)$ для решения любого первого порядка линейная ОДУ. Напомним, что такое ОДУ линейно по функции и его первая производная. Общая форма линейного ОДУ первого порядка в $x(t)$ такова: \начать{собирать} \diff{x}{t} + p(t)x(t)=q(t). \label{фолин}\тег{6} \конец{собрать} (Если ОДУ имеет функцию $t$, умножающую $\diff{x}{t}$, вы можете разделить на функцию, чтобы представить ее в таком виде, предполагая, что функция никогда не равен нулю.)
Повторим описанную выше процедуру, чтобы превратить левую часть уравнения \eqref{folin} в производную от $t$.
Умножая на интегрирующий множитель $\mu(t)$, ОДУ принимает вид
\начать{собирать}
\mu(t)\diff{x}{t} + \mu(t)p(t)x(t)=\mu(t)q(t).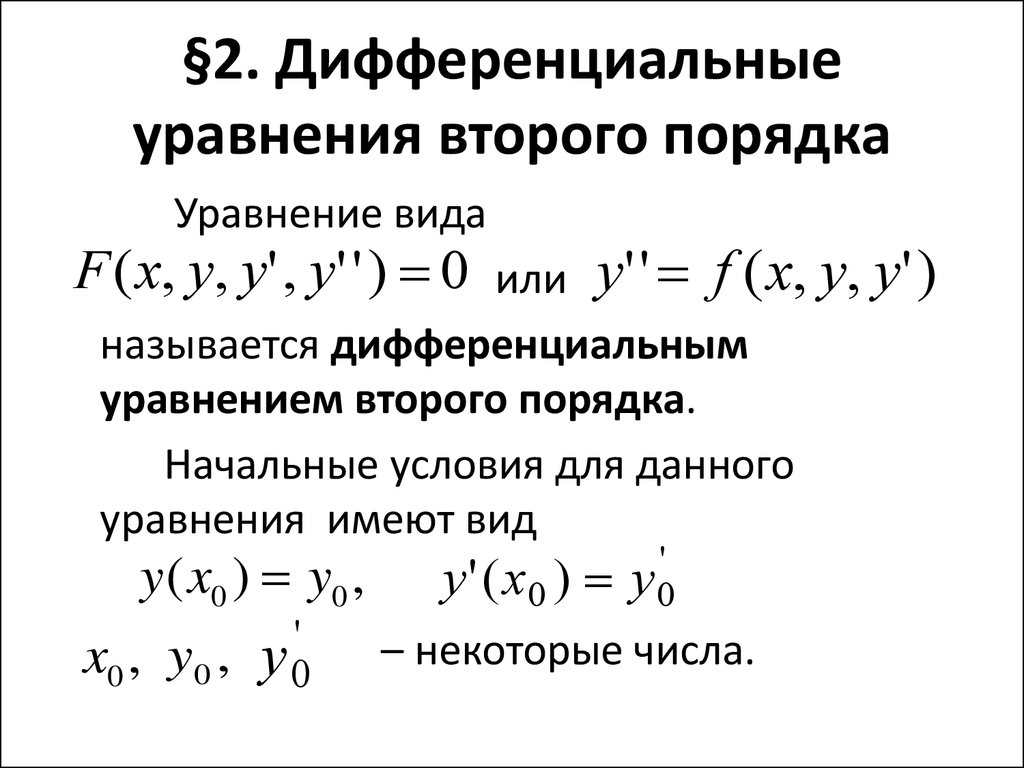 \label{folin_multmu}\tag{7}
\конец{собрать}
Левая часть уравнения \eqref{folin_multmu} будет производной от $\mu(t)x(t)$
$$\diff{}{t}(\mu(t)x(t)) = \mu(t)\diff{x}{t} + \diff{\mu}{t}x(t)$$
если бы мы могли обменять $\diff{\mu}{t}$ на $\mu(t)p(t)$.
Единственным отличием от первого примера является наличие функции
$р(т)$.
\label{folin_multmu}\tag{7}
\конец{собрать}
Левая часть уравнения \eqref{folin_multmu} будет производной от $\mu(t)x(t)$
$$\diff{}{t}(\mu(t)x(t)) = \mu(t)\diff{x}{t} + \diff{\mu}{t}x(t)$$
если бы мы могли обменять $\diff{\mu}{t}$ на $\mu(t)p(t)$.
Единственным отличием от первого примера является наличие функции
$р(т)$.
Интегрирующий множитель $\mu(t)$ должен удовлетворять уравнению \начать{собирать} \diff{\mu}{t} = p(t)\mu(t). \label{folin_odemu}\tag{8} \конец{собрать} Это уравнение похоже на уравнение (3) из введения ОДУ, за исключением того, что у нас есть изменяющийся во времени коэффициент $p(t)$. Аналогично можно решить следующим образом.
Если разделить уравнение \eqref{folin_odemu} на $\mu(t)$, левая часть
становится $\displaystyle\frac{1}{\mu(t)}\diff{\mu}{t} = \diff{}{t} \log |\mu(t)|$.
Мы можем преобразовать уравнение \eqref{folin_odemu} в
\начать{собирать*}
\diff{}{t} \log |\mu(t)| = р(т),
\end{собрать*}
которое легко решается интегрированием
\начать{выравнивать*}
\int \diff{}{t} \log |\mu(t)| dt&= \int p(t)dt\\
\лог |\му(т)| &= \int p(t)dt + C_2.