
Метод Гаусса для решения систем линейных алгебраических уравнений общего вида.
Методом Гаусса можно решать системы линейных алгебраических уравнений любого вида без предварительного их исследования на совместность. Процесс последовательного исключения неизвестных переменных позволяет сделать вывод как о совместности, так и о несовместности СЛАУ, а в случае существования решения дает возможность отыскать его.
С точки зрения вычислительной работы метод Гаусса является предпочтительным.
Смотрите его подробное описание и разобранные примеры в статье метод Гаусса для решения систем линейных алгебраических уравнений общего вида.
К началу страницы
Запись общего решения однородных и неоднородных систем линейных алгебраических с помощью векторов фундаментальной системы решений.
В этом разделе речь пойдет о совместных однородных и неоднородных системах линейных алгебраических уравнений, имеющих бесконечное множество решений.
Разберемся
сначала с однородными системами.
Фундаментальной системой решенийоднородной системы изpлинейных алгебраических уравнений сnнеизвестными переменными называют совокупность
Если обозначить линейно независимые решения однородной СЛАУ как X(1), X(2), …, X(n-r)(X(1), X(2), …, X(n-r)– это матрицы столбцы размерностиnна1), то общее решение этой однородной системыпредставляется в виде линейной комбинации векторов фундаментальной системы решений с произвольными постоянными коэффициентамиС1, С2, …, С(n-r), то есть,.
Что обозначает термин общее решение однородной системы линейных алгебраических уравнений (орослау)?
Смысл
прост: формула
задает
все возможные решения исходной СЛАУ,
другими словами, взяв любой набор
значений произвольных постоянныхС1,
С2, …, С(n-r), по
формулемы
получим одно из решений исходной
однородной СЛАУ.
Таким образом, если мы найдем фундаментальную систему решений, то мы сможем задать все решения этой однородной СЛАУ как .
Покажем процесс построения фундаментальной системы решений однородной СЛАУ.
Выбираем базисный минор исходной системы линейных уравнений, исключаем все остальные уравнения из системы и переносим в правые части уравнений системы с противоположными знаками все слагаемые, содержащие свободные неизвестные переменные. Придадим свободным неизвестным переменным значения 1,0,0,…,0и вычислим основные неизвестные, решив полученную элементарную систему линейных уравнений любым способом, например, методом Крамера. Так будет полученоX(1)– первое решение фундаментальной системы. Если придать свободным неизвестным значения0,1,0,0,…,0и вычислить при этом основные неизвестные, то получимX(2)
 Так будет построена фундаментальная
система решений однородной СЛАУ и может
быть записано ее общее решение в виде.
Так будет построена фундаментальная
система решений однородной СЛАУ и может
быть записано ее общее решение в виде.Для неоднородных систем линейных алгебраических уравнений общее решение представляется в виде , где- общее решение соответствующей однородной системы, а- частное решение исходной неоднородной СЛАУ, которое мы получаем, придав свободным неизвестным значения0,0,…,0и вычислив значения основных неизвестных.
Разберем на примерах.
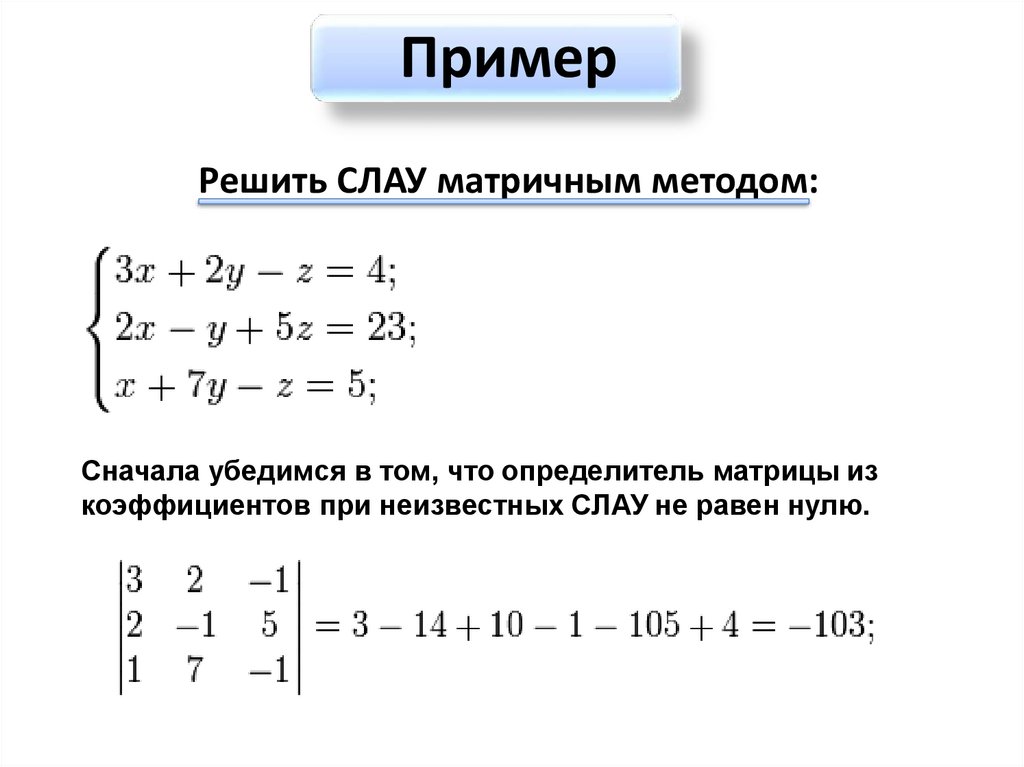
Пример.
Найдите фундаментальную систему решений и общее решение однородной системы линейных алгебраических уравнений .
Решение.
Ранг основной матрицы однородных систем линейных уравнений всегда равен рангу расширенной матрицы. Найдем ранг основной матрицы методом окаймляющих миноров. В качестве ненулевого минора первого порядка возьмем элемент a1 1 = 9основной матрицы системы. Найдем окаймляющий ненулевой минор второго порядка:
Минор
второго порядка, отличный от нуля,
найден. Переберем окаймляющие его миноры
третьего порядка в поисках ненулевого:
Переберем окаймляющие его миноры
третьего порядка в поисках ненулевого:
Все окаймляющие миноры третьего порядка равны нулю, следовательно, ранг основной и расширенной матрицы равен двум. Базисным минором возьмем . Отметим для наглядности элементы системы, которые его образуют:
Третье уравнение исходной СЛАУ не участвует в образовании базисного минора, поэтому, может быть исключено:
Оставляем в правых частях уравнений слагаемые, содержащие основные неизвестные, а в правые части переносим слагаемые со свободными неизвестными:
Построим фундаментальную систему решений исходной однородной системы линейных уравнений. Фундаментальная система решений данной СЛАУ состоит из двух решений, так как исходная СЛАУ содержит четыре неизвестных переменных, а порядок ее базисного минора равен двум. Для нахождения

Решим ее методом Крамера:
Таким образом, .
Теперь построим X(2). Для этого придадим свободным неизвестным переменным значенияx2 = 0, x4 = 1, тогда основные неизвестные найдем из системы линейных уравнений.
Опять воспользуемся методом Крамера:
Получаем .
Так мы получили два вектора фундаментальной системы решений и, теперь мы можем записать общее решение однородной системы линейных алгебраических уравнений:, гдеC1иC2– произвольные числа.
Пример.
Найдите общее решение неоднородной системы линейных алгебраических уравнений .
Решение.
Общее решение этой системы уравнений будем искать в виде .
Исходной неоднородной СЛАУ соответствует однородная система общее решение которой мы нашли в предыдущем примере.
Следовательно,
нам осталось найти частное решение
неоднородной системы линейных
алгебраических уравнений
.
Ранг основной матрицы системы равен двум, ранг расширенной матрицы системы также равен двум, так как все миноры третьего порядка, окаймляющие минор , равны нулю. Также примем минорв качестве базисного, исключим третье уравнение из системы и перенесем слагаемые со свободными неизвестными в правые части уравнений системы:
Для нахождения придадим свободным неизвестным переменным значенияx2 = 0 и x4 = 0, тогда система уравнений примет вид, откуда методом Крамера найдем основные неизвестные переменные:
Имеем , следовательно,гдеC1иC2– произвольные числа.
Следует заметить, что решения неопределенной однородной системы линейных алгебраических уравнений порождают линейное пространстворазмерности(n – r), базисом которого является фундаментальная система решений.
К началу страницы
Численные методы для ПЭВМ на языках Бейсик, Фортран и Паскаль
Численные методы для ПЭВМ на языках Бейсик, Фортран и Паскаль
ОглавлениеПРЕДИСЛОВИЕПРЕДИСЛОВИЕ ГЛАВА 1. ТРАНСЦЕНДЕНТНЫЕ УРАВНЕНИЯ ГЛАВА 1. ТРАНСЦЕНДЕНТНЫЕ УРАВНЕНИЯ 1.2. Метод дихотомии 1.2. Метод дихотомии 1.3. Метод хорд 1.3. Метод хорд 1.4. Метод Ньютона (метод касательных) 1.4. Метод Ньютона (метод касательных) 1.5. Метод секущих 1.  5. Метод секущих 5. Метод секущих1.6. Метод простых итераций ГЛАВА 2. ЗАДАЧИ ЛИНЕЙНОЙ АЛГЕБРЫ 1.6. Метод простых итераций ГЛАВА 2. ЗАДАЧИ ЛИНЕЙНОЙ АЛГЕБРЫ 2.1. Метод Гаусса с выбором главного элемента для решения СЛАУ 2.1. Метод Гаусса с выбором главного элемента для решения СЛАУ 2.2. Итерационные методы решения СЛАУ 2.3. Вычисление определителей 2.3. Вычисление определителей 2.4. Вычисление элементов обратной матрицы 2.4. Вычисление элементов обратной матрицы 2.5. Вычисление собственных значений матриц ГЛАВА 3. ИНТЕРПОЛЯЦИЯ ЗАВИСИМОСТЕЙ 2.5. Вычисление собственных значений матриц ГЛАВА 3. ИНТЕРПОЛЯЦИЯ ЗАВИСИМОСТЕЙ 3.1. Интерполяция каноническим полиномом 3.1. Интерполяция каноническим полиномом 3.3. Интерполяционный полином Лагранжа 3.3. Интерполяционный полином Лагранжа 3.3. Интерполяционный полином Ньютона 3.3. Интерполяционный полином Ньютона 3.4. Применение интерполяции для решения уравнений 3. 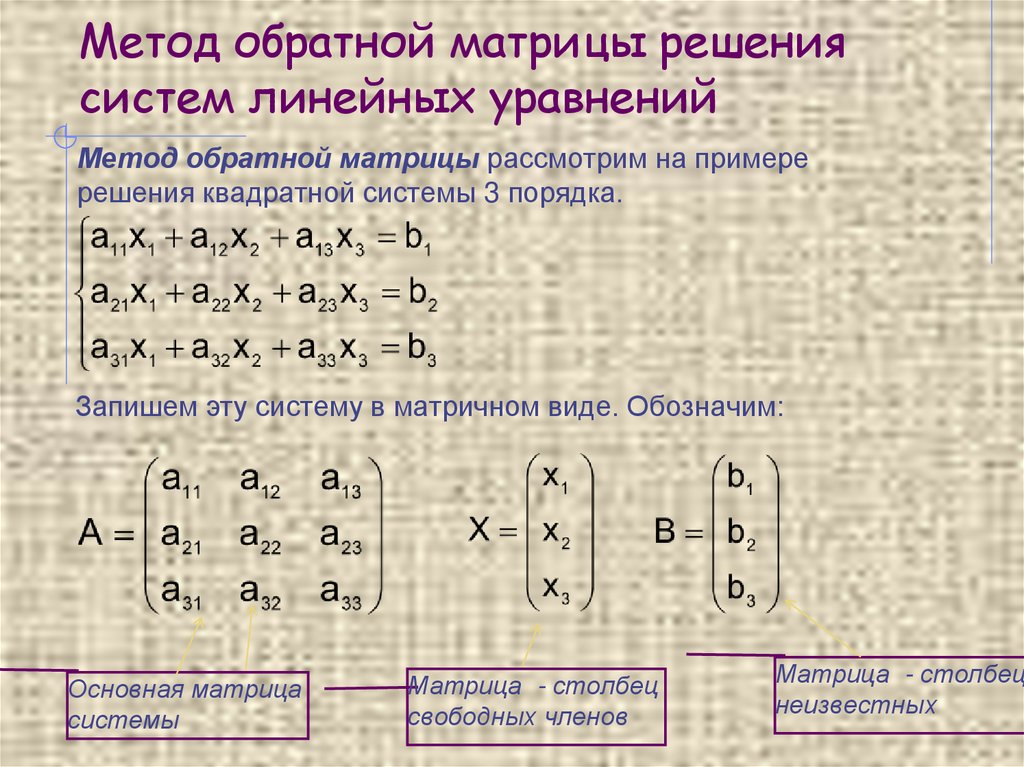 4. Применение интерполяции для решения уравнений 4. Применение интерполяции для решения уравнений3.5. Интерполяционный метод определения собственных значений матрицы 3.5. Интерполяционный метод определения собственных значений матрицы 3.6. Интерполяция сплайнами 3.6. Интерполяция сплайнами ГЛАВА 4. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ ГЛАВА 4. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 4.2. Степенной базис 4.2. Степенной базис 4.3. Базис в виде классических ортогональных полиномов 4.3. Базис в виде классических ортогональных полиномов 4.4. Базис в виде ортогональных полиномов дискретной переменней 4.4. Базис в виде ортогональных полиномов дискретной переменней 4.5. Линейный вариант МНК 4.5. Линейный вариант МНК 4.6. Дифференцирование при аппроксимации зависимостей МНК 4.6. Дифференцирование при аппроксимации зависимостей МНК ГЛАВА 5. ОПРЕДЕЛЕННЫЕ ИНТЕГРАЛЫ ГЛАВА 5. ОПРЕДЕЛЕННЫЕ ИНТЕГРАЛЫ 5.2. Методы прямоугольников 5.2. Методы прямоугольников 5.3. Апостериорные оценки погрешностей по Рунге и Эйткену 5.  3. Апостериорные оценки погрешностей по Рунге и Эйткену 3. Апостериорные оценки погрешностей по Рунге и Эйткену5.4. Метод трапеций 5.4. Метод трапеций 5.5. Метод Симпсона 5.5. Метод Симпсона 5.6. Вычисление интегралов с заданной точностью 5.6. Вычисление интегралов с заданной точностью 5.7. Применение сплайнов для численного интегрирования 5.7. Применение сплайнов для численного интегрирования 5.8. Методы наивысшей алгебраической точности 5.8. Методы наивысшей алгебраической точности 5.9. Несобственные интегралы 5.9. Несобственные интегралы 5.10. Методы Монте-Карло ГЛАВА 6. ЗАДАЧА КОШИ ДЛЯ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 5.10. Методы Монте-Карло ГЛАВА 6. ЗАДАЧА КОШИ ДЛЯ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 6.1. Типы задач для обыкновенных дифференциальных уравнений 6.1. Типы задач для обыкновенных дифференциальных уравнений 6.2. Метод Эйлера 6.2. Метод Эйлера 6.3. Методы Рунге-Кутты второго порядка 6.3. Методы Рунге-Кутты второго порядка 6.  4. Метод Рунге-Кутты четвертого порядка 4. Метод Рунге-Кутты четвертого порядка6.4. Метод Рунге-Кутты четвертого порядка 6.5. Метод Рунге-Кутты-Мерсона 6.5. Метод Рунге-Кутты-Мерсона 6.6. Метод Адамса 6.6. Метод Адамса 6.7. Метод Гира ГЛАВА 7. ГРАНИЧНЫЕ ЗАДАЧИ 6.7. Метод Гира ГЛАВА 7. ГРАНИЧНЫЕ ЗАДАЧИ 7.1. Метод конечных разностей для линейных граничных задач 7.1. Метод конечных разностей для линейных граничных задач 7.2. Метод стрельбы для граничных задач 7.2. Метод стрельбы для граничных задач 7.3. Граничные задачи на собственные значения для обыкновенных дифференциальных уравнений 7.3. Граничные задачи на собственные значения для обыкновенных дифференциальных уравнений 7.4. Метод стрельбы для задачи на собственные значения 7.4. Метод стрельбы для задачи на собственные значения 7.5. Метод конечных разностей для задачи на собственные значения 7.5. Метод конечных разностей для задачи на собственные значения 7.6. Граничная задача для дифференциального уравнения в частных производных 7.  |
