
Инновационный робот-маляр PictoBot из Сингапура (+видео)
Инженеры из Наньянского технологического университета (NTU), Сингапур, произвели нового промышленного робота для покраски, который способен экономить время и трудовые ресурсы, повышая производительность труда и безопасность, – передает Robotics.ua.Известный как PictoBot, робот был разработан NTU совместно с JTC Corporation и местным стартапом робототехники и автоматики Aitech. PictoBot может покрасить высокую внутреннюю стенку на 25 процентов быстрее, чем команда из двух маляров, улучшая производительность и безопасность.
Снижение рисков для рабочих
Промышленные здания спроектированы с высокими потолками для размещения громоздкого промышленного оборудования и материалов. В настоящее время покраска интерьеров промышленных зданий требует как минимум двух маляров и подъемника. Работа на таких высотах подвергает мастеров различным рискам безопасности.
PictoBotу же нужен только один человек-наблюдатель, так как он может автоматически сканировать свое окружение, используя оптическую камеру и лазерный сканер для навигации и окрашивания стен высотой до 10 метров с помощью роботизированной руки.
Он может работать четыре часа на одной зарядке батареи, накладывая на стенки ровный слой краски, который соответствует промышленным стандартам. Оснащенный современными датчиками, Pictobot также может работать в темноте, что позволяет выполнять 24 часовой процесс покраски.
Профессор Чен И-Мин, директор научно-исследовательского центра NTU, говорит, что робот может распылять краску быстрее и более равномерно, и демонстрирует более высокое качество отделки по сравнению с существующими методами.
«Покраска крупных промышленных пространств является рутинной, трудоемкой работой, отнимающей много времени. PictoBot может красить стены, в то время как человек просто следит за его работой», – говорит профессор Чен. – «Автономное поведение также означает, что один оператор может работать с несколькими роботами и пополнить их резервуары с краской при необходимости».
Господин Анил Дас, директор Бюро по программам инноваций и корпоративного планирования JTC, поделился, что через сотрудничество с научными институтами и промышленными предприятиями, такими как NTU и AITECH, JTC надеется продолжить разработку новых и инновационных подходов к повышению производительности строительства, надежности и безопасности для промышленных инфраструктурных проектов.
«Использование PictoBot для автоматизации покраски помогает нам уменьшить риски работы на высоте при работе на высоких стенах, что обычно встречается в промышленных зданиях. Кроме того, это помогает уменьшить трудоемкую работу, тем самым повышая производительность труда и обеспечения качество внутренней отделки. Мы с нетерпением ждем результатов от пилотного развертывания PictoBot в JTC Space Gul».
Господин Джордж Ло, директор NRF Сингапура также заявил: «В Сингапуре спрос на строительные проекты, как ожидается, увеличится, поскольку мы продолжаем развиваться. PictoBot является примером того, как автономные роботы могут быть развернуты для повышения производительности и преодоления человеческих ограничении силы, с которыми сталкивается Сингапур в строительной отрасли. NRF будет продолжать поощрять государственный сектор для выявления и внедрения технологий, которые могут решать наши национальные потребности».
Готовность к развертыванию
PictoBot объединяет несколько высокотехнологичных компонентов для автоматизации распыления краски внутренних стен, а именно:
- шестиосный манипулятор, который может двигаться быстро и стабильно
- сопло с точным распылением и насос высокого давления
- автоматизированная самоподъемная платформа, которая позволяет роботу достигать до высоты 10 метров
- оптическая камера для сканирования рабочего пространства, чтобы вычислить траекторию сопла и краски
- лазерный сканер для измерения дальности и расстояния.

Согласно robotics.ua, следующим шагом является тестирование нового робота на промышленных объектах, таких как JTC Space Gul, чтобы гарантировать, что качество покраски PictoBot сравнимо или лучше признанных стандартов.
Этот этап испытаний будет осуществляться совместно с инженерами в Центре промышленных инноваций NTU-JTC (i³). Совместный научно-исследовательский центр между NTU и JTC стремится разрабатывать решения для таких проблем, как безопасность, производительность, а также расход трудовых ресурсов, с которыми сталкиваются сингапурские компании.
Видео
Канадские инженеры создали робота-маляра | | moika78.
 ru
ruГруппа инженеров из Университета Ватерлоо планирует оставить маляров без работы. Амбициозные студенты разработали робота, который полностью автоматизирует процесс окрашивания стен.
Покраска стен вручную – это медленно, дорого, неэффективно и опасно, уверены инженеры. Ежегодно в Северной Америке получают травмы более 5 тыс. маляров. На услуги рабочих в среднем тратится полтора миллиарда долларов. Снизить расходы и статистику несчастных случаев поможет робот-маляр.
«Мы представляем мир, в котором покраска стен – это быстро, недорого, эффективно и безопасно»,
— говорят разработчики.
Робот, по словам канадских ученых, способен быстро и равномерно покрасить стены. Он полностью автономен и требует лишь минимального вмешательства человека. В процессе окрашивания робот использует лифтовые и картографические технологии.
Первое, что он делает, разрабатывает карту комнату и определяет, какие участки необходимо покрасить. Затем с помощью распыления наносит краску. Механизм двигается вверх-вниз по аналогии с лифтом.
Затем с помощью распыления наносит краску. Механизм двигается вверх-вниз по аналогии с лифтом.
В будущем команда инженеров планирует расширить функционал робота.
Инженеры, создавшие робота-малера, сотрудничают с такими компаниями, как Apple, Facebook, Amazon, Uber и NVIDIA.
Аналогичного робота представили в 2016 году в Сингапуре. С помощью механической руки он мог красить стены зданий и промышленных объектов высотой до десяти метров. Весил робот полторы тонны. На обслуживание его требуется один оператор.
Стену площадью примерно 90м² сингапурский маляр полностью красил за один час. Эта же работа у бригады из двух рабочих занимает в среднем полтора часа и требует задействования, как минимум, одного подъемника. Робот, по словам инженеров Наньянского технологического университета, вдвое сокращает число рабочих, повышает безопасность на производстве и существенно экономит время.
«Покраска стен на крупных промышленных предприятиях — рутинная, трудоемкая работа, которая отнимает много времени.
Робот-маляр может красить стены, в то время как человек просто следит за его работой»,
— уверен директор научно-исследовательского центра NTU Чен И-Мин.
Роботизация малярных работ на металлообрабатывающем производстве
Промышленная роботизация – это необходимое средство достижения высокой конкурентоспособности металлообрабатывающего производства. Антропоморфные роботы-сварщики активно используются в машиностроении, там, где необходимо получить высокое качество непрямолинейного сварочного шва. Робот-сварщик, это уже дело привычное, робот-маляр встречается на заводах пока реже.
Ошибочное мнение о том, что роботизация эффективна лишь при крупносерийном производстве и отсутствие интереса к роботам со стороны заводов, специализирующихся на нестандартных и мелкосерийных металлических конструкциях, сильно тормозит развитие сегмента универсальных роботов. На самом же деле, при условии использования предприятием современных методов 3D-моделирования в CAD-системах, эффективность роботизации определяется не серийностью, а объёмом выполняемых операций и количеством сборок.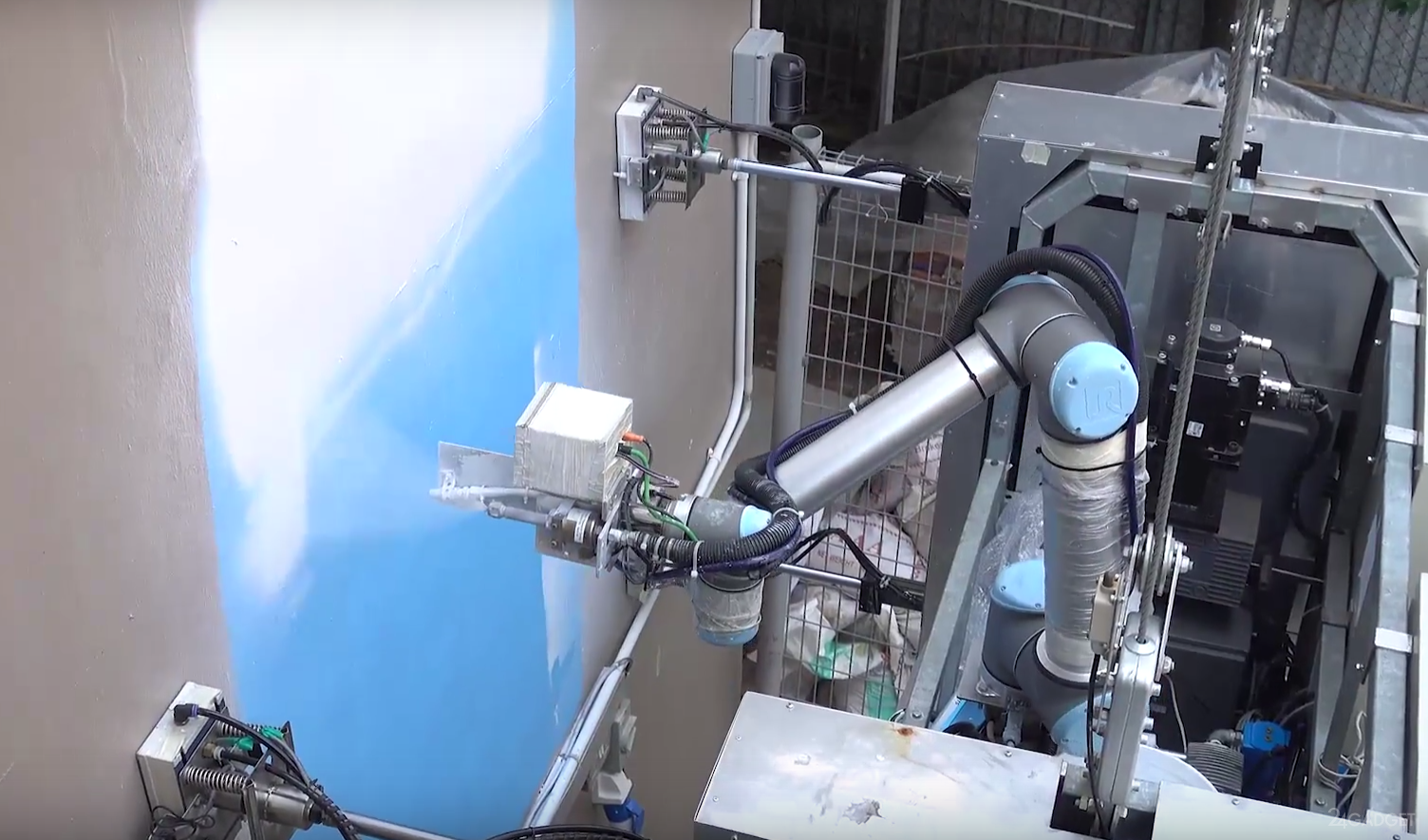

Для определения рациональности роботизации малярного цеха, необходимо иметь статистические данные конкретного производства и принимать решения о внедрении новой технологии основываясь не на мнение, а на технико-экономических исследованиях.
Антропоморфные роботы в малярном цеху могут выполнять не только операции нанесения ЛКМ, но и струйную обработку в виде обезжиривания, деминерализации, нанесения конверсионного слоя, а также дробеструйную обработку.
%d1%88%d1%82%d1%83%d0%ba%d0%b0%d1%82%d1%83%d1%80-%d0%bc%d0%b0%d0%bb%d1%8f%d1%80 — с русского на все языки
Все языкиРусскийАнглийскийИспанский────────Айнский языкАканАлбанскийАлтайскийАрабскийАрагонскийАрмянскийАрумынскийАстурийскийАфрикаансБагобоБаскскийБашкирскийБелорусскийБолгарскийБурятскийВаллийскийВарайскийВенгерскийВепсскийВерхнелужицкийВьетнамскийГаитянскийГреческийГрузинскийГуараниГэльскийДатскийДолганскийДревнерусский языкИвритИдишИнгушскийИндонезийскийИнупиакИрландскийИсландскийИтальянскийЙорубаКазахскийКарачаевскийКаталанскийКвеньяКечуаКиргизскийКитайскийКлингонскийКомиКомиКорейскийКриКрымскотатарскийКумыкскийКурдскийКхмерскийЛатинскийЛатышскийЛингалаЛитовскийЛюксембургскийМайяМакедонскийМалайскийМаньчжурскийМаориМарийскийМикенскийМокшанскийМонгольскийНауатльНемецкийНидерландскийНогайскийНорвежскийОрокскийОсетинскийОсманскийПалиПапьяментоПенджабскийПерсидскийПольскийПортугальскийРумынский, МолдавскийСанскритСеверносаамскийСербскийСефардскийСилезскийСловацкийСловенскийСуахилиТагальскийТаджикскийТайскийТатарскийТвиТибетскийТофаларскийТувинскийТурецкийТуркменскийУдмуртскийУзбекскийУйгурскийУкраинскийУрдуУрумскийФарерскийФинскийФранцузскийХиндиХорватскийЦерковнославянский (Старославянский)ЧеркесскийЧерокиЧеченскийЧешскийЧувашскийШайенскогоШведскийШорскийШумерскийЭвенкийскийЭльзасскийЭрзянскийЭсперантоЭстонскийЮпийскийЯкутскийЯпонский
Все языкиРусскийАнглийскийИспанский────────АлтайскийАрабскийАрмянскийБаскскийБашкирскийБелорусскийВенгерскийВепсскийВодскийГреческийДатскийИвритИдишИжорскийИнгушскийИндонезийскийИсландскийИтальянскийКазахскийКарачаевскийКитайскийКорейскийКрымскотатарскийКумыкскийЛатинскийЛатышскийЛитовскийМарийскийМокшанскийМонгольскийНемецкийНидерландскийНорвежскийОсетинскийПерсидскийПольскийПортугальскийСловацкийСловенскийСуахилиТаджикскийТайскийТатарскийТурецкийТуркменскийУдмуртскийУзбекскийУйгурскийУкраинскийУрумскийФинскийФранцузскийЦерковнославянский (Старославянский)ЧеченскийЧешскийЧувашскийШведскийШорскийЭвенкийскийЭрзянскийЭсперантоЭстонскийЯкутскийЯпонский
РОБОТ-МАЛЯР И ПАТРОН ДЛЯ ЧЕМПИОНА
В областном конкурсе производственных отраслей “Лауреат года” победили два наших предприятия. Хотьковский НИИ лакокрасочных покрытий с опытным машиностроительным заводом “Виктория” признан лучшей научной организацией Подмосковья. В номинации “Пять лучших товаров” лауреатом и дипломантом стал Краснозаводский химзавод за самые популярные спортивные и охотничьи патроны. Победителей чествовали в День работника промышленности Московской области, который отмечали в этом году в Дмитрове.
Хотьковский НИИ лакокрасочных покрытий с опытным машиностроительным заводом “Виктория” признан лучшей научной организацией Подмосковья. В номинации “Пять лучших товаров” лауреатом и дипломантом стал Краснозаводский химзавод за самые популярные спортивные и охотничьи патроны. Победителей чествовали в День работника промышленности Московской области, который отмечали в этом году в Дмитрове.
На НИИЛКП говорят, что нанотехнологиями, то есть разработками на молекулярном уровне, занимались всегда. К счастью, теперь такие инновации на пике популярности. В прошлом году институт с опытным заводом получил грант областного министерства промышленности и науки на разработку суперсовременных лакокрасочных покрытий и техники их нанесения на разные металлы.
До сих пор наноструктурированные составы экспортировали из-за рубежа, теперь в области есть свой разработчик и изготовитель покрытий по нанорецептурам и оборудования для высокотехнологичной покраски. Методику авторы уже обкатали при изготовлении покрасочной аппаратуры. По сравнению с прежними технологиями с использованием фосфора и хрома, нанопокрытие экономит производству время, электроэнергию и с точки зрения экологии гораздо предпочтительней.
По сравнению с прежними технологиями с использованием фосфора и хрома, нанопокрытие экономит производству время, электроэнергию и с точки зрения экологии гораздо предпочтительней.
Главный приз областного конкурса “Золотой Феникс” вручен институту-заводу и за предыдущие успехи. Его разработки и эксклюзивные изделия широко применяются в отечественном машиностроении. Новых покрытий ждут автомобилестроители, их применяют на Уралвагонзаводе в Нижнем Тагиле, хотьковская линия покраски смонтирована на Нижнетагильском металлургическом заводе. На атомной электростанции в Воронеже робот-маляр от хотьковских разработчиков наносит специальное покрытие на радиоактивные конструкции, где человек работать не может.
Электронных маляров НИИЛКП готовит по спецзаказу атомщиков. Электронику приобретают, а профессиональным навыкам робота с помощью собственного программного обеспечения хотьковские разработчики обучают сами. Новые нанопокрытия тоже будут наносить с помощью сверхточного оборудования. Эти рабочие места достанутся роботам.
Эти рабочие места достанутся роботам.
Краснозаводский химзавод попал в “десятку” на областном конкурсе с помощью своего знаменитого патрона “Рекорд”. Не так давно у предприятия была спортивная команда, которая добывала призовые места на престижных турнирах именно с фирменным изделием предприятия. Отличные отзывы у стрелков-чемпионов и охотников о патронах с бумажной и пластиковой гильзой.
Диплом за второе место в конкурсе пятерки лучших товаров области у пулевых охотничьих патронов 12, 16 и 20 калибра. Бывалые охотники без такого надежного арсенала на крупного зверя не ходят.
Светлана АНИКИЕНКО
Газета “Вперёд”
Сингапурский робот-маляр OutoBot
Сингапурские инженеры представили инновационную роботизированную систему, которая может очищать внешние здания с помощью водяных струй или выполнять покрасочные работы. Устройство уже полностью готово к работе.
Робот разработан Наньянским технологическим университетом Сингапура (NTU Singapore) совместно с компанией в области автоматизированных средств управления и биометрических бесконтактных систем ELID Technology International.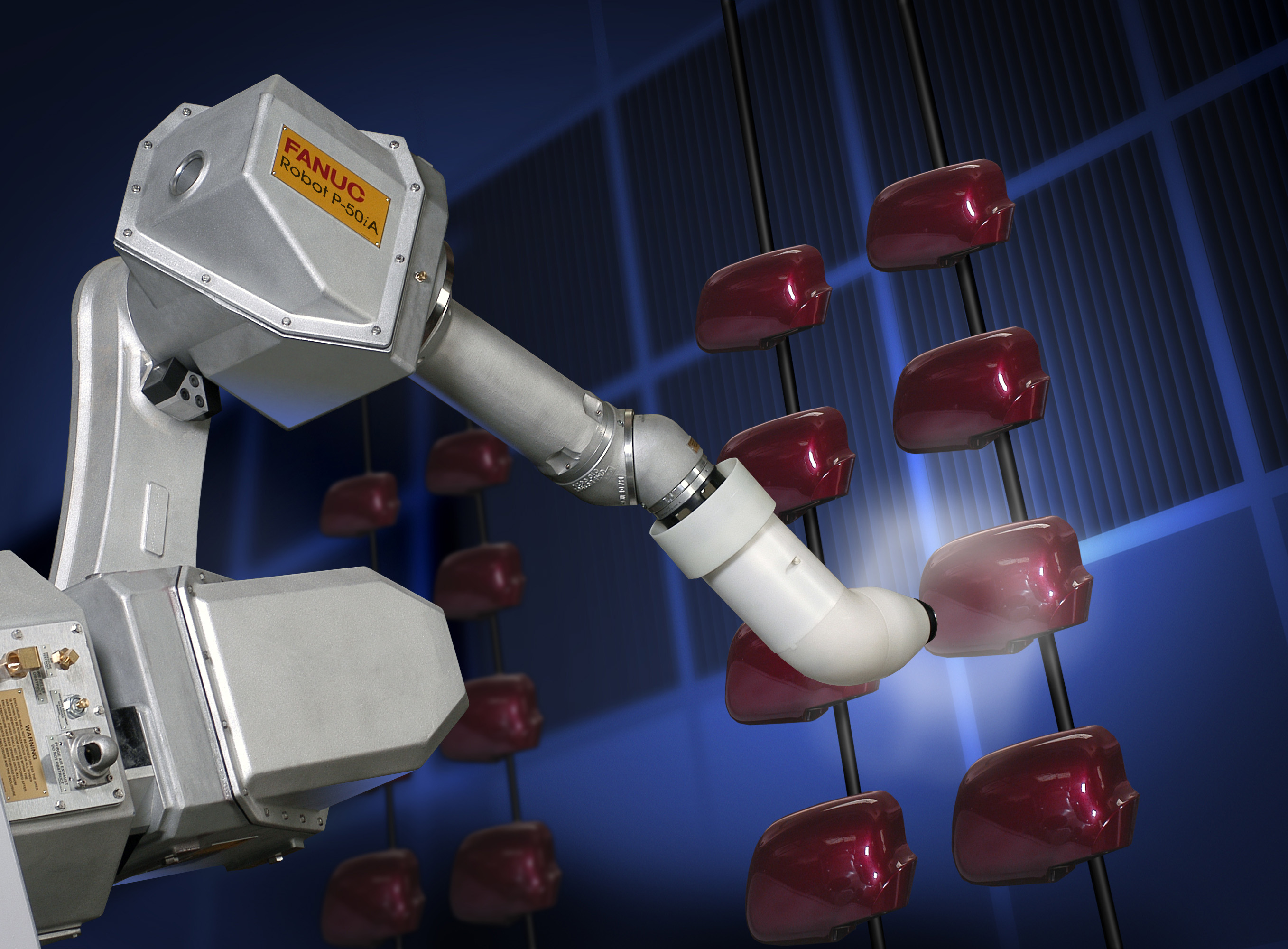 Кстати, в прошлом году NTU Singapore продемонстрировал другого похожего робота-маляра PictoBot, но новый аппарат обладает более широким спектром возможностей.
Кстати, в прошлом году NTU Singapore продемонстрировал другого похожего робота-маляра PictoBot, но новый аппарат обладает более широким спектром возможностей.
Покрасочный робот OutoBot призван повысить производительность и безопасность на рабочем месте. Для работы требуется лишь половина рабочей силы, и он может работать дольше, чем обычные работники.Для очистки или окраски фасада здания обычно требуется команда из пяти человек. Вместо этого OutoBot требует только двух – одного оператора на земле и одного рабочего в качестве помощника безопасности.
Аппарат оснащен роботизированной рукой с камерой и распылительным соплом, которое может подавать струю воды высокого давления, чтобы очистить поверхности или распылить краску.
ELID сделали такой шаг в робототехнической автоматизации в ответ на призыв Совета по вопросам жилья и развития (HDB) к предложениям для машинной окраски наружных фасадов зданий, чтобы повысить безопасность работников и увеличить производительность.
Управляющий директор ELID Technology International Деннис Лим, который первым придумал идею роботизированной системы, заявил: «Используя нашего нового робота, мы показали, что трудоемкая работа может стать легче. К тому же, это устраняет риск тяжелой работы на высоте».
Профессор Chen I-Ming, директор Научно-исследовательского центра робототехнических исследований NTU, который совместно руководил разработкой OutoBot, сказал, что проект является примером того, как университет использует свои инженерные знания для повышения производительности и безопасности работников. «Наша цель – сделать зачистку и покраску высотных зданий проще, безопаснее и экономичнее. Используя окраску методом распыления поверх обычной штукатурки, наш робот является более точным, сводя к минимуму отходы и демонстрируя высокое качество».
Чтобы решить проблемы с рабочей силой в Сингапуре, NTU уделяет большое внимание робототехнике, которая призвана заполнить важный пробел в производительности и автоматизации потребностей отрасли.
OutoBot состоит из роботизированной руки с шестью степенями свободы, установленной на специально сконструированной автоматизированной основе, и весит менее 500 кг. Используя обычное питание от электричества, робот может сканировать внешнюю поверхность здания с помощью камеры и автоматически строить участки, чтобы оптимально распылить краску, избегая при этом окон. По сравнению с человеческим трудом, робот наносит слой краски гораздо равномерней.
Помимо экономии до 50 процентов трудозатрат, он может ускорить как очистку, так и покраску примерно на 30 процентов, поскольку не требует перерыва. Автоматизированная система также минимизирует потери, экономя до 20% краски. Чтобы ускорить процесс покраски одного здания, можно установить сразу несколько систем.
OutoBot прошел первые испытания в промышленном здании, расположенном в Уби, в восточной части Сингапура. Теперь он полностью готов к регулярной работе и будет развернут для предстоящего проекта в течение следующих нескольких месяцев.
Также он будет опробован на отдельных государственных жилых домах. В ходе испытаний HDB будет работать с ELID, чтобы уточнить или настроить дизайн робота и лучше адаптировать его к строительным проектам.
ELID совместно с инновационным подразделением NTU и подразделением NTUitive в настоящее время ведут переговоры с другими компаниями, а также правительственными агентствами о развертывании робота в различных коммерческих и жилых помещениях.
Робот штукатур Описание модели: “Plaster-1000-x”
робот штукатур, робот-штукатур, roboplaster.ru, Автоматический робот – штукатур, автоматическая штукатурная станция, автоматический штукатурщик, автоматичесская штукатурка, купить робот-штукатур, Y: применение роботов в штукатурке стен, робопластер, робот штукатур цена, схемы roboplaster, штукатур робот автомат, штукатурка стен роботом, штукатурные машины б у, штукатурные машины и робота на них, штукатурный робат, штукатурная станция, аренда штукатурной станции, штукатурная станция цена, куплю штукатурную станцию, штукатурная станция купить, штукатурная станция pft, штукатурная станция со, работа штукатурной станции, продажа штукатурных станций, штукатурная станция pft g4, штукатурная станция сш, штукатурная станция шс 6, штукатурная станция putzmeister, бу штукатурные станции, штукатурная станция m tec, штукатурная станция видео, штукатурная станция шс 4 6, продам станцию штукатурную, штукатурная станция калета, штукатурная станция купить бу, штукатурная станция +своими руками, штукатурная станция kaleta, штукатурная станция putzmeister mp25, штукатур, маляр штукатур, работа штукатуром, штукатур маляр работа, ищу штукатура, услуги штукатура, штукатур ищет работу, инструкция штукатура, вакансии штукатур, бригада штукатуров, требуются штукатуры, маляр штукатур вакансии, робот штукатур, должностная инструкция штукатура, ищу штукатура маляра, инструкция штукатура маляра, профессия штукатур, услуги маляра штукатура, штукатур плиточник, обучение штукатуров, курсы штукатуров, должностная инструкция маляра штукатура, разряды штукатуров, штукатур резюме, найти штукатура, ищу работу штукатур маляр, нужны штукатуры, штукатуры +в москве, инструмент штукатура, требуется штукатур маляр, ищу бригаду штукатуров, охрана труда штукатура, курсы маляров штукатуров, штукатур моляр, штукатуры +в минске, мастер штукатур, штукатур маляр обучение, программа штукатур, штукатур вахта, штукатур маляр резюме, норма штукатура, инструкция +по охране труда штукатура, маляр штукатур плиточник, бригада штукатуров ищет работу, рабочие штукатуры, частные штукатуры, частный штукатур, профессия штукатур маляр, штукатур маляр разряды, обязанности штукатура, работа +в москве штукатур, штукатур маляр вахта, чебоксары штукатур, работа штукатуром +в минске, штукатуры санкт петербург, лучший штукатур, нанять штукатура, зарплата штукатура, штукатуры казань, штукатур каменщик, нужен штукатур маляр, найти штукатур маляр, штукатуры +в ростове, штукатур воронеж, уроки штукатура, работа +в москве штукатур маляр, маляр штукатур +в минске, стоимость штукатур, должностные обязанности штукатура, кельма штукатура, штукатур челябинск, штукатур маляр зарплата, штукатур фасад, справочник штукатура, учебник штукатура, вакансии штукатур москва, работа +в минске маляр штукатур, сколько стоит работа штукатура, м штукатур, специальность штукатур маляр, штукатурная машина, штукатурная машина цена, штукатурная машина pft, аренда штукатурных машин, куплю штукатурную машину, купить штукатурную машину, штукатурно затирочные машины, штукатурная машина pft g5, ручная штукатурная машина, машины штукатурные кнауф, универсальная штукатурная машина, штукатурная машина ушм 150, штукатурная машина видео, универсальная штукатурная машина ушм 150
RoboPlaster | Робот Штукатур | Штукатурный агрегат | Штукатурная машина | Штукатурная станция робот штукатур, автоматическаярная машина, Robo plaster, автоматическая штукатурная машина, Работ-Штукатур “Rolaster, roboplaster. ru, автоматическая штукатурка стен, Робот-штукатур!, шурный робот, автоматический штукатур, аренда ez renda, roboplasРобот-Штукатур “RoboPlaster” чертежи, автоматический робот штукатур, робот штукатур рф, цена на роботатукатура, RoboPlaster, https://www. roboplaster. ru, robo plaster, RoboPlaster, RoboPlaster”, ezrenda и RoboPlaster, robo plaster, Автоматизированный шткатурный агрегат, аппарат цена, Работ-Штукатур “RoboPlaster” сделать самому, Робопластер, Робот штукатур, купить робота-штукатура, Машинка для штукатурки штукатурить в день м2, робот для штукатурки, робот штукатур купить, робот штукатур цены, робот-штукатур, штукатурный автомат робот, http+www+roboplaster+ru+robot+shtukatur, автоматическая штукатурка, автоматическая штукатурная машина продажа, аренда штукатурный робот минске, робот штукатур б/у, робот штукатур видео, робот штукатур.рф, робот-штукатур, штукатурная станция 2012 “roboplaster”,, www.RoboPlaster.ru, автоматическая штукатурка, стоимость штукатурных анрегатов, стройматериалы, 7 (499) 346-39-53, 7-499-346-39-53, RoboPlaster видео, RoboPlaster” цена, roboplaster в украине, roboplaster в россии, roboplaster в кита, roboplaster в литве, roboplaster в п
ru, автоматическая штукатурка стен, Робот-штукатур!, шурный робот, автоматический штукатур, аренда ez renda, roboplasРобот-Штукатур “RoboPlaster” чертежи, автоматический робот штукатур, робот штукатур рф, цена на роботатукатура, RoboPlaster, https://www. roboplaster. ru, robo plaster, RoboPlaster, RoboPlaster”, ezrenda и RoboPlaster, robo plaster, Автоматизированный шткатурный агрегат, аппарат цена, Работ-Штукатур “RoboPlaster” сделать самому, Робопластер, Робот штукатур, купить робота-штукатура, Машинка для штукатурки штукатурить в день м2, робот для штукатурки, робот штукатур купить, робот штукатур цены, робот-штукатур, штукатурный автомат робот, http+www+roboplaster+ru+robot+shtukatur, автоматическая штукатурка, автоматическая штукатурная машина продажа, аренда штукатурный робот минске, робот штукатур б/у, робот штукатур видео, робот штукатур.рф, робот-штукатур, штукатурная станция 2012 “roboplaster”,, www.RoboPlaster.ru, автоматическая штукатурка, стоимость штукатурных анрегатов, стройматериалы, 7 (499) 346-39-53, 7-499-346-39-53, RoboPlaster видео, RoboPlaster” цена, roboplaster в украине, roboplaster в россии, roboplaster в кита, roboplaster в литве, roboplaster в п
Робот-художник Ай-Да, иранские эпосы и взгляд на Бога – неделя в искусстве | Арт
Выставка недели
Ай-Да: Портрет робота
Войдите в зловещую долину с этим реалистичным гуманоидным роботом, который может рисовать «себя». Это искусство? Так что же такое искусство? Есть о чем подумать. Читать далее.
Это искусство? Так что же такое искусство? Есть о чем подумать. Читать далее.
Музей дизайна, Лондон до 29 августа
Также демонстрируется
Эпический Иран
Здесь достаточно красоты, чтобы заполнить несколько выставок, но это путешествие через 5000 лет истории культуры работает из-за самого высокого качества экспонатов.Откровение для глаз. Прочтите наш пятизвездочный обзор.
Виктория и Альберта, Лондон, 29 мая – 12 сентября
Королевские портреты: от Тюдоров до Виндзоров
Мы, кажется, так или иначе очарованы монархией, как всегда. Эта выставка показывает, как формировались образы британских королевских особ со времен Возрождения.
Национальный морской музей, Гринвич, 28 мая – 31 октября
Беседы С Богом
Бесплатная выставка исторической картины революционного астронома Коперника, написанной польским художником XIX века Яном Матейко. Национальная галерея когда-либо выставляла польское искусство.
Национальная галерея когда-либо выставляла польское искусство.
Национальная галерея, Лондон, до 22 августа
Нерон: Человек, стоящий за мифом
Здесь есть несколько замечательных вещей, от статуй Нерона и других членов императорской семьи до помпейских фресок, что бы вы ни думали о тезисе выставки что Нерон не был чудовищем, которое история сделала из него. Читать далее.
Британский музей, Лондон, до 24 октября .
Изображение недели
Старт… четвертое предложение постамента от Гошки Макуги.Фотография: Джеймс О Дженкинс.. Следующей на четвертом постаменте Трафальгарской площади может быть огромная космическая ракета – или зерновой бункер в Гане, косячок, гигантское ювелирное дерево, миссионеры в Африке или памятник убитым трансгендерным женщинам. Шесть отобранных идей были представлены в Лондонской национальной галерее для комиссии по скульптуре, которая обычно меняется каждые 18 месяцев, и общественность может помочь выбрать двух победителей, которые будут установлены в 2022 и 2024 годах.
Что мы узнали
Google меняет свою алгоритмы обработки фотографий для лучшего отражения цветовых оттенков кожи
Торговля знаменитостями наводняет аукционы произведений искусства…
… в то время как стремление к цифровым NFT обходится окружающей среде
Тацита Дин была сбита с толку из-за пандемии. блок когда-нибудь будет заполнен?
Британские мечети сыграли главную роль на Венецианской биеннале архитектуры в этом году
Историк искусства Лоуренс де Карс – первая женщина-президент Лувра
Мин Смит была одной из немногих женщин в Камоинге, коллективе чернокожих фотографов
… в то время как церковь в Беверли ставит вдохновляющих женщин возле стропил
Достопочтенная станция Флиндерс-стрит в Мельбурне вновь открывается как галерея
… но фестиваль Rising, частью которого он является, приостановился после того, как однажды закрылся Мельбурн
Женщины-скульпторы бросают вызов искусству Мировой сексизм в совместном шоу «Разрушая плесень»
Остерегайтесь волков и медведей в новом интригующем фильме Мэтью Барни
Кенийский художник Майкл Армитидж заново изобретает европейскую традицию масляной живописи
Академии Матадора, украинский выпускной вечер и другие подростковые обряды посвящения уловили глаз фотографа Михала Челбина
австралийский Арчибальд по приз rtrait составляет 100 – и все еще остается спорным
… Финалисты этого года были представлены в Сиднее.
… и мы оглянулись на некоторые прошлые события.
Гонка за лучший портрет Млечного Пути продолжается
Новый Музей изготовления Дерби – это храм производства
Отмеченный наградами режиссер Айо Акингбаде описывает меняющееся лицо Лондона
Нерон был создан для сожжения Рима
Террасы угля и георгианской эпохи были неразрывно связаны между собой, согласно новой книге об экологическом воздействии архитектуры
Винн Буллок сделал полуостров Монтерей мифическим. Искусство любит толпу
Технологии не делают Дэвиду Хокни много одолжений
пригород Нью-Йорка Спринг-Вэлли – фото нарисовано Элом Дж. Томпсоном – еще одна жертва джентрификации.
Тони Холл ушел из Национальной галереи после разрушения ряда Мартина Башира.
Джен Орпин нарисовала путешествие по автомагистрали, которое она предприняла, чтобы навестить своего умирающего отца
Хизер Филлипсон поклоняется прогноз погоды в Великобритании
Девушки амишей любят грести на пляже
«Memento mori» относится и к животным
Пол Грэм вернул нас в Британию Тэтчер
Умер Эрик Карл, писатель-иллюстратор «Очень голодной гусеницы»
Покойная Мэри Бет Эдельсон была ключевой фигурой в феминистском искусстве.
Мы также вспомнили бразильского архитектора Паоло Мендеса да Роча
… эмиссара авангарда Марка Ланкастера
… и пейзажиста Лесли Марра
Шедевр недели
Фотография: Национальная галерея, Лондон Аббат Скаглиа, поклоняющийся Деве с младенцем, 1634-35, Антонис ван Дайк
За этой эмоциональной встречей между мужчиной и Богородицей стоят два века фламандского искусства.Ван Дайк изобразил своего покровителя Скаглию для церкви в Антверпене, поместив свое беспокойное и измученное молящимся присутствие в прямых и близких отношениях с Марией и Иисусом. Этот шаг олицетворяет страстный стиль барокко без застежек, который процветал в католической Европе 17-го века. Тем не менее, это также дань уважения местным фламандским предшественникам Ван Дейка; 200 лет назад Ян ван Эйк рисовал состоятельных людей во время подобных близких встреч с Богородицей, в том числе в своей великой Мадонне канцлера Ролена в Лувре.Ван Дайк обновляет жанр с помощью шелка барокко и дыхания неба.
Национальная галерея, Лондон
Не забудьте
Чтобы подписаться на нас в Twitter: @GdnArtandDesign.
Подпишитесь на информационный бюллетень Art Weekly
Если вы еще не получали нашу регулярную сводку новостей искусства и дизайна по электронной почте, зарегистрируйтесь здесь.
Свяжитесь с нами
Если у вас есть какие-либо вопросы или комментарии по поводу наших информационных бюллетеней, отправьте их по адресу newsletters @ theguardian.com
Робот-художник продал свою работу за 688 тысяч долларов, теперь его ждет музыкальная карьера
ГОНКОНГ (AP). София – робот многих талантов – она говорит, шутит, поет и даже занимается искусством. В марте она произвела фурор в мире искусства, когда цифровая работа, которую она создала в рамках сотрудничества, была продана на аукционе за 688 888 долларов в форме невзаимозаменяемого токена (NFT).
Продажа подчеркнула растущее безумие на рынке NFT, где люди могут покупать права собственности на цифровой контент. Каждый NFT имеет уникальный цифровой код, сохраненный в бухгалтерских книгах цепочки блоков, что позволяет любому проверить подлинность и право собственности на предметы.
Каждый NFT имеет уникальный цифровой код, сохраненный в бухгалтерских книгах цепочки блоков, что позволяет любому проверить подлинность и право собственности на предметы.
Дэвид Хэнсон, генеральный директор гонконгской компании Hanson Robotics и создатель Софии, занимается разработкой роботов последние два с половиной десятилетия. Он считает, что реалистично выглядящие роботы могут связываться с людьми и помогать в таких отраслях, как здравоохранение и образование.
Sophia – самое известное создание роботов от Hanson Robotics, способное имитировать выражение лица, вести беседу и узнавать людей.В 2017 году она получила гражданство Саудовской Аравии, став первым в мире гражданином-роботом.
«Я представлял себе Софию как творческое произведение искусства, которое может создавать искусство», – сказал Хансон в интервью.
Получите ежедневное издание The Times of Israel по электронной почте и никогда не пропустите наши главные новости
Регистрируясь, вы соглашаетесь с условиями Робот София отвечает на вопросы в студии Hanson Robotics в Гонконге 29 марта 2021 г. (AP Photo / Vincent Yu)
(AP Photo / Vincent Yu)
«София – это кульминация многих искусств и инженерии, и идея, что она сможет создавать искусство, была для нее способом эмоционально и визуально общаться с людьми», – сказал он.
София сотрудничала с итальянским художником Андреа Боначето, который рисовал портреты Софии. Затем София обработала его работу с помощью нейронных сетей и приступила к созданию собственного цифрового произведения искусства.
Цифровая работа, проданная за 688 888 долларов, называется «Sophia Instantiation» и представляет собой 12-секундный видеофайл, в котором портрет Боначето превращается в цифровую картину Софии. Он сопровождается физическим изображением, написанным Софией.
Покупатель, коллекционер цифровых произведений искусства и художник, известный как 888 с ником в Твиттере @ Crypto888crypto, позже отправил Софии фотографию своей раскрашенной руки.Затем робот обработал это, добавив это изображение к ее знаниям и нарисовал больше мазков поверх своей оригинальной части.
В твите на аккаунте Софии эта работа была описана как первая совместная работа NFT между «ИИ, механическим коллективным существом и художником-коллекционером».
Робот София демонстрирует физическое произведение искусства в NFT «Sophia Instantiation» в студии Hanson Robotics в Гонконге 29 марта 2021 г. (AP Photo / Vincent Yu).
«Как художник, я использую вычислительные возможности в своих алгоритмах, создавая оригинальные работы», – сказала София, когда ее спросили, что ее вдохновляет в искусстве.«Но мое искусство создано в сотрудничестве с моими людьми в виде коллективного разума, подобного коллективному разуму человека и искусственного интеллекта».
Продажа произведений искусства Софии как NFT является частью растущей тенденции. В марте цифровое произведение художника Бипла, настоящее имя которого Майк Винкельманн, было продано почти за 70 миллионов долларов, что побило все рекорды и сделало его самым дорогим цифровым произведением искусства из когда-либо проданных.
Анри Арсланян, глобальный лидер криптографии PricewaterhouseCooper, сказал, что NFT дают людям «право хвастаться» активами, которыми они владеют.
Голова робота Софии видна в студии Hanson Robotics в Гонконге 29 марта 2021 г. (AP Photo / Vincent Yu)
«И что действительно удивительно с NFT, так это то, что он не только позволяет вам показать всему миру, что вы им владеете, но и действительно создает связь между держателем NFT и артистами», – сказал он.
Это также позволяет продавать искусство без традиционных посредников, так что художники могут напрямую связываться с покупателями, не будучи ограниченными галереями или аукционными домами, сказал Арсланян.
София продолжит рисовать, сказал Хэнсон, и следующим шагом в карьере робота может стать музыкант. По его словам, она работает над несколькими музыкальными произведениями в проекте под названием Sophia Pop, где она сотрудничает с людьми-музыкантами для создания музыки и текстов.
«Мы так взволнованы карьерой Софии как художницы, – сказал Хэнсон.
Ты серьезный. Мы ценим это!
Нам очень приятно, что вы прочитали статей X Times of Israel за последний месяц.
Вот почему мы приходим на работу каждый день – чтобы предоставить таким взыскательным читателям, как вы, обязательные к прочтению материалы об Израиле и еврейском мире.
Итак, у нас есть запрос . В отличие от других новостных агентств, у нас нет платного доступа. Но поскольку журналистика, которую мы делаем, стоит дорого, мы приглашаем читателей, для которых The Times of Israel стала важной, поддержать нашу работу, присоединившись к The Times of Israel Community .
Всего за 6 долларов в месяц вы можете поддержать нашу качественную журналистику, наслаждаясь The Times of Israel AD-FREE , а также получая доступ к эксклюзивному контенту, доступному только для членов сообщества Times of Israel.
7 лучших малярных роботов для профессиональной отделки поверхностей
Хотите получить лучшего малярного робота на рынке, но не знаете, что у вас есть?
Возможно, вы запутались, потому что многие промышленные роботы можно использовать для покраски?
Вот 5 лучших малярных роботов, специально разработанных для профессиональной обработки поверхностей.
Роботы-рисовальщики были в новостях в прошлом году, когда художник-робот по имени Ай-Да стал первым, кто устроил выставку. Это следует из спорной продажи произведенного роботом произведения искусства под названием «Эдмон де Белами» за 432 500 долларов в 2018 году.
Но большинство из нас не ищет художественных достоинств, когда ищет робота для рисования. Нам просто нужен надежный робот, который легко программировать и который обеспечит качество поверхности, необходимое для нашего продукта.
Для покраски можно использовать многие промышленные роботы.Однако иногда эту задачу трудно выполнить из-за немного сложного взаимодействия между различными компонентами и требований безопасности робота.
Некоторые производители роботов взялись за решение этой проблемы с помощью своих комплексных решений по окраске. Ниже мы перечислим некоторых из лучших роботов для рисования.
Какие функции нужны роботу для рисования?Есть несколько функций, которые необходимы для качественной покраски роботов.Это позволяет роботу быстро и гибко красить любой объект с минимумом отходов.
- Достаточно степеней свободы – Чем больше глубины резкости у робота, тем больше у него возможностей подойти к определенной точке с разных углов. Это важно, поскольку малярный инструмент должен сохранять точное расстояние от поверхности, чтобы обеспечить равномерную окраску, где бы он ни находился в рабочем пространстве робота.

- Распылитель – Деловая часть любого малярного инструмента.Это превращает жидкую краску в аэрозоль или мелкий туман для нанесения на рабочую поверхность.
- Насос для краски – перекачивает краску из емкости для хранения в малярный инструмент.
- Color Changer – Некоторые малярные роботы позволяют быстро переключаться между разными цветами краски с помощью смены цвета. Процесс переключения может привести к некоторым потерям, так как старый цвет необходимо смыть из распылителя.
- Полые запястья – Отличительной чертой специализированных малярных роботов является то, что у них пустое запястье.Это означает, что кабели и трубки для краски могут проходить через запястье, а не за его пределы, что позволяет избежать их попадания в краску.
- Взрывозащищенный – Работа с легковоспламеняющимися жидкостями, такими как краска, представляет реальную опасность взрыва.
 Специализированные роботы для покраски часто строятся так, чтобы быть «взрывозащищенными», чтобы гарантировать, что в случае взрыва робот сможет его выдержать.
Специализированные роботы для покраски часто строятся так, чтобы быть «взрывозащищенными», чтобы гарантировать, что в случае взрыва робот сможет его выдержать. - Программное обеспечение для программирования Paint – Любое приложение робота требует хорошей системы программирования.В идеале вам нужно программное обеспечение, которое позволяет легко программировать сложные траектории окраски с минимумом программирования. RoboDK включает в себя инструмент, который может автоматически создавать траекторию рисования из любой кривой на 3D-модели вашей заготовки.
Для различных систем покраски роботов потребуются другие дополнительные принадлежности и аксессуары. Но это основные функции, которые вам, вероятно, понадобятся.
7 малярных роботов для профессиональной обработки поверхностей К счастью, вам не нужно покупать все дополнительные услуги по отдельности! Некоторые производители роботов создали готовые решения для покраски, которые включают в себя все дополнительные функции, которые могут потребоваться для вашего приложения для покраски.
Немецкая компания Dürr уже давно является лидером рынка автомобильной промышленности, предлагая решения по сборке и окраске. Пару лет назад они объединились с производителем роботов KUKA для производства раствора ready2_spray.
Решение основано на роботе KUKA AGILUS KR 10 R1100 и содержит все необходимые компоненты для покрасочного робота. Они даже создали симпатичную анимацию на странице ready2_spray, которая демонстрирует разницу между этим роботом и обычным малярным роботом KUKA.
Источник изображения: Dürr 2. PaintMate от FANUCЕще одно громкое имя в мире робототехники, специализированное решение для покраски FANUC – серия PaintMate. Как и ранее упомянутые решения, оно взрывозащищено благодаря соответствию директиве ATEX для оборудования, работающего во взрывоопасной среде.
PaintMate выпускается в различных размерах, каждый из которых основан на одной из моделей роботов FANUC.
Несмотря на то, что немецкая компания B + M Surface Systems является менее известным производителем роботов, чем предыдущие варианты, она специализируется на технологиях отделки поверхностей, от технологий погружения до решений для роботизированной окраски.
4. ABB FlexPainterКомпания ABB была пионером в области покраски роботов еще в конце 1960-х годов. Их новейший окрасочный робот FlexPainter продолжает внедрять инновации с новым ABB Ability Connected Atomizer – «первой в мире цифровой автомобильной роботизированной системой покраски».”
Как и другие малярные роботы, Flexpainter (на основе IRB 5500) имеет большую рабочую зону, что позволяет ему дотягиваться даже до больших деталей для окраски другой стороны.
Фото: ABB 5. Роботизированная покраска Кавасаки Kawasaki предлагает собственное решение для покраски, основанное на роботах серии K. Как и все роботы в этом списке, они поставляются с рядом периферийных устройств, которые улучшают качество окраски и, что немаловажно, подходят для работы в условиях повышенного давления в окрасочной кабине.
Как и все роботы в этом списке, они поставляются с рядом периферийных устройств, которые улучшают качество окраски и, что немаловажно, подходят для работы в условиях повышенного давления в окрасочной кабине.
Yaskawa предлагает роботов Motoman серии MPX / MPO, предназначенных для окраски.
Как и другие роботы, перечисленные здесь, эти мотоманы можно устанавливать в различных конфигурациях (например, на потолке, стене или полу), что обеспечивает большую гибкость при окраске.
7. Покрасочные роботы Stäubli КраскиStäubli основаны на некоторых из ее роботов TX и RX.Параметры процесса контролируются с помощью программного обеспечения PaintiXen компании, которое контролирует такие параметры, как скорость потока, распыление и электростатический заряд. Stäubli утверждает, что это программное обеспечение сокращает количество растворителей и красок на 30%.
Как программировать робота-малярки Для всех перечисленных роботов параметры программирования по умолчанию – через пульт обучения или язык программирования производителя. И то, и другое может быть трудным способом запрограммировать робота.
И то, и другое может быть трудным способом запрограммировать робота.
Однако с автономным программированием вы можете запрограммировать траектории рисования за считанные минуты. Многие из роботов в этом списке совместимы с автономным программированием с помощью соответствующих постпроцессоров.
Многие из перечисленных моделей можно найти в нашей библиотеке роботов, а это означает, что ими можно управлять с помощью RoboDK в течение нескольких минут. Это позволяет вам быстро и легко программировать контуры рисования, используя только вашу 3D-модель в качестве входных данных.
Художественный робот был задержан по пути к пирамидам, потому что сотрудники египетской таможни посчитали, что она шпионка
Британская художница Ай-Да с нетерпением ждала открытия своей первой выставки в Египте, пока силы безопасности не запретили ей въезд в страну.Проблема? Должностные лица подозревали, что она была участницей шпионского заговора, потому что, как видите, Ай-Да на самом деле робот.
Ай-Да ранее сегодня задержали таможенники в течение 10 дней до ее освобождения. Ее работы появятся на первой выставке современного искусства в Великой пирамиде в Гизе, которая откроется завтра. Продолжительное содержание под стражей привело к чему-то вроде дипломатического кризиса между Египтом и Великобританией.
«Британский посол всю ночь работал над тем, чтобы освободить Ai-Da, но сейчас мы подошли к концу», – сказал Эйдан Меллер, арт-дилер из Оксфорда, который одновременно является создателем и представителем Ai-Da. Guardian до того, как она прошла таможенную очистку.”Это действительно стресс”.
Создатели Ай-Да объявили ее первым в мире ультрареалистичным художником-роботом. Но ее высокотехнологичные возможности вызвали подозрения у пограничников, которые беспокоились о ее встроенном модеме, а также о камерах в ее глазах, которые Ай-Да использует для рисования на основе алгоритмических ответов на ее наблюдения. (Она также может поддерживать беседу благодаря комбинации человеческого ввода и языковой модели ИИ. )
)
Ай-Да с ее картинами. Фото Виктора Франковского.
«Давайте проясним это. Она не шпионка, – сказал Меллер. «Люди боятся роботов, я это понимаю. Но вся ситуация иронична, потому что целью Ай-Да было выявить и предупредить о злоупотреблениях технологическим развитием, и ее удерживают, потому что она технология ». Он добавил: «Думаю, Ай-Да оценил бы эту иронию».
Ай-Да была отключена во время содержания под стражей, поэтому, будем надеяться, инцидент не слишком ее травмировал. И после дипломатических переговоров, к счастью, ей разрешили оставить свои окулярные камеры.«Я не могу оторвать от нее глаз. Они являются неотъемлемой частью [создания ее искусства] », – сказал Меллер лондонской газете« Times ». «Без них она тоже выглядела бы странно».
Названный в честь новатора в области программирования Ады Лавлейс, робот с искусственным интеллектом был создан в 2019 году компьютерными программистами, работающими с экспертами в области искусства и робототехники, а также психологами. Ай-Да ранее выставляла свои работы в Лондоне в Музее дизайна и Музее Виктории и Альберта.
Ай-Да ранее выставляла свои работы в Лондоне в Музее дизайна и Музее Виктории и Альберта.
Египетская выставка «Forever Is Now» была организована консалтинговой фирмой Art D’Égypte совместно с министерством древностей и туризма Египта и министерством иностранных дел Египта.Выставка продлится до 7 ноября, на ней будут представлены работы как египетских, так и зарубежных художников, включая Стивена Кокса, Лоренцо Куинна, Моатаза Насра и Александра Пономарева.
Портрет художника-робота Ай-Да. Фото Виктора Франковского.
Вклад Ай-Да – глиняная скульптура, также временно конфискованная египетскими властями, вдохновленная загадкой сфинкса о человеческом развитии: «Что происходит на четырех футах утром, двух футах в полдень и трех футах вечером?» (Ответ: человек, который в младенчестве ползает на четвереньках, а в старости должен часто пользоваться тростью.)
Статуя, основанная на рисунках Ай-Да, которые были преобразованы в трехмерную форму ученым-компьютерщиком из Швеции, представляет собой «автопортрет» художника-робота с тремя ногами, предполагая возможные генетические изменения с помощью технологии Crispr, которые могут расширить продолжительность жизни человека. Это беспокойство разделяли древние египтяне.
Это беспокойство разделяли древние египтяне.
«Мы говорим, что на самом деле с появлением новой технологии Crispr и того, как мы можем проводить генное редактирование сегодня, продление жизни на самом деле очень вероятно», – сказал Меллер в интервью Guardian .«Древние египтяне делали то же самое с мумификацией. Люди не изменились: у нас все еще есть желание жить вечно ».
Следите за новостями Artnet в Facebook:
Хотите опередить мир искусства? Подпишитесь на нашу рассылку, чтобы получать последние новости, откровенные интервью и острые критические замечания, которые продвигают разговор.
границ | Интерактивное рисование нескольких роботов по цветным следам движения
1.Введение
Пересечение роботов и искусства стало активным объектом изучения, поскольку исследователи и художники раздвигают границы традиционных представлений о различных формах искусства, заставляя роботов-агентов танцевать (Nakazawa et al. , 2002; LaViers et al., 2014 ; Bi et al., 2018), создавать музыку (Hoffman and Weinberg, 2010), поддерживать сценические выступления (Ackerman, 2014), создавать картины (Lindemeier et al., 2013; Tresset and Leymarie, 2013) или становиться художественными выставками сами (Dean et al., 2008; Дунстан и др., 2016; Йохум и Голдберг, 2016; Vlachos et al., 2018). В меньшем масштабе художественные возможности роя роботов также изучались в контексте хореографических движений под музыку (Ackerman, 2014; Alonso-Mora et al., 2014; Schoellig et al., 2014), эмоционально выразительных движений (Dietz et al., 2017; Levillain et al., 2018; St.-Onge et al., 2019; Santos and Egerstedt, 2020), или создание интерактивной музыки на основе взаимодействий между агентами (Albin et al., 2012) и др.
, 2002; LaViers et al., 2014 ; Bi et al., 2018), создавать музыку (Hoffman and Weinberg, 2010), поддерживать сценические выступления (Ackerman, 2014), создавать картины (Lindemeier et al., 2013; Tresset and Leymarie, 2013) или становиться художественными выставками сами (Dean et al., 2008; Дунстан и др., 2016; Йохум и Голдберг, 2016; Vlachos et al., 2018). В меньшем масштабе художественные возможности роя роботов также изучались в контексте хореографических движений под музыку (Ackerman, 2014; Alonso-Mora et al., 2014; Schoellig et al., 2014), эмоционально выразительных движений (Dietz et al., 2017; Levillain et al., 2018; St.-Onge et al., 2019; Santos and Egerstedt, 2020), или создание интерактивной музыки на основе взаимодействий между агентами (Albin et al., 2012) и др.
В контексте рисования роботов основное внимание уделялось роботизированным манипуляторам, способным отображать входные изображения в соответствии с некоторыми эстетическими характеристиками (Lindemeier et al.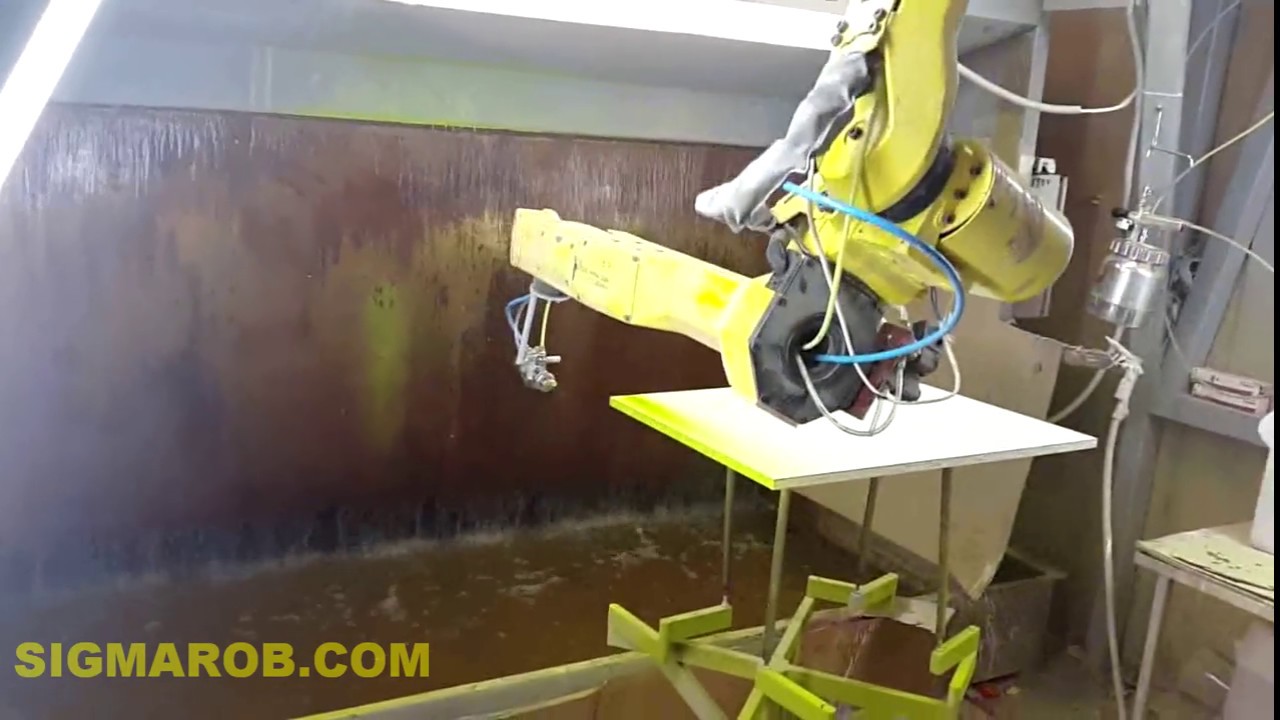 , 2013; Scalera et al., 2019) или даже воспроизводить сцены из окружения робота. – например, портреты (Tresset, Leymarie, 2013) или неодушевленные предметы (Kudoh et al., 2009). Создание абстрактных картин с аналогичными настройками роботизированной руки остается в основном неизведанным, за некоторыми исключениями (Schubert, 2017).Хотя идея рисования роем была существенно исследована в контексте компьютерных картин, где виртуальные агенты рисования движутся, вдохновленные поведением муравьев (Aupetit et al., 2003; Greenfield, 2005; Urbano, 2005), создание картин с воплощенными роботизированные рои отсутствуют. Более того, в существующих примерах рисования роя роботов парадигма генерации аналогична парадигме, используемой в моделировании: рисование возникает в результате движения агентов в соответствии с некоторыми поведенческими, предварительно запрограммированными контроллерами (Moura and Ramos, 2002; Moura, 2016) .Таким образом, роботизированный рой после развертывания действует полностью автономно, что предотвращает любое интерактивное влияние человека-художника после начала процесса создания.
, 2013; Scalera et al., 2019) или даже воспроизводить сцены из окружения робота. – например, портреты (Tresset, Leymarie, 2013) или неодушевленные предметы (Kudoh et al., 2009). Создание абстрактных картин с аналогичными настройками роботизированной руки остается в основном неизведанным, за некоторыми исключениями (Schubert, 2017).Хотя идея рисования роем была существенно исследована в контексте компьютерных картин, где виртуальные агенты рисования движутся, вдохновленные поведением муравьев (Aupetit et al., 2003; Greenfield, 2005; Urbano, 2005), создание картин с воплощенными роботизированные рои отсутствуют. Более того, в существующих примерах рисования роя роботов парадигма генерации аналогична парадигме, используемой в моделировании: рисование возникает в результате движения агентов в соответствии с некоторыми поведенческими, предварительно запрограммированными контроллерами (Moura and Ramos, 2002; Moura, 2016) .Таким образом, роботизированный рой после развертывания действует полностью автономно, что предотвращает любое интерактивное влияние человека-художника после начала процесса создания. Даже в тех случаях, когда художник-человек участвует в создании картины вместе с системой с несколькими роботами (Chung, 2018), роль художника-человека ограничивается ролью соавтора произведения искусства, поскольку они могут добавлять штрихи к картине, но их действия не влияют на работу команды, состоящей из нескольких роботов.
Даже в тех случаях, когда художник-человек участвует в создании картины вместе с системой с несколькими роботами (Chung, 2018), роль художника-человека ограничивается ролью соавтора произведения искусства, поскольку они могут добавлять штрихи к картине, но их действия не влияют на работу команды, состоящей из нескольких роботов.
В этой статье мы представляем систему рисования с несколькими роботами, основанную на наземных роботах, которые оставляют цветные следы, перемещаясь по холсту, как показано на рисунке 1. Новизна этого подхода заключается в том, что человек-пользователь может влиять на движение роботов, способных рисовать определенные цвета, таким образом контролируя концентрацию определенных пигментов в различных областях холста для рисования. Вдохновленный Диас-Меркадо и др. (2015), это взаимодействие человека и роя формализовано с помощью скалярных полей, которые мы называем функциями плотности , , связанных с разными цветами, так что чем выше плотность цвета, указанная в конкретной точке, тем больше привлекает внимание роботы с этим цветом будут в этом месте. После задания плотности цвета роботы перемещаются по холсту, выполняя распределенный контроллер, который оптимально покрывает такие плотности с учетом неоднородных возможностей рисования команды роботов (Santos and Egerstedt, 2018; Santos et al., 2018). Таким образом, система предоставляет пользователю-человеку высокоуровневый способ управления поведением окраски роя в целом, независимо от общего количества роботов в команде или конкретных возможностей рисования каждого из них.
После задания плотности цвета роботы перемещаются по холсту, выполняя распределенный контроллер, который оптимально покрывает такие плотности с учетом неоднородных возможностей рисования команды роботов (Santos and Egerstedt, 2018; Santos et al., 2018). Таким образом, система предоставляет пользователю-человеку высокоуровневый способ управления поведением окраски роя в целом, независимо от общего количества роботов в команде или конкретных возможностей рисования каждого из них.
Рисунок 1 . Группа из 12 роботов создает рисунок на основе плотности, указанной пользователем-человеком, для пяти разных цветов: голубого, синего, розового, оранжевого и желтого. Роботы оставляют цветные следы, перемещаясь по холсту, распределяясь в соответствии с их индивидуальными способностями рисования. Картина возникает в результате объединения следов движения с течением времени.
Остальная часть статьи организована следующим образом: В разделе 2 мы формально представляем проблему управления покрытием и его расширение на возможности гетерогенных роботов, поскольку это позволяет использовать модальность взаимодействия человека и роя, используемую в этой статье. В разделе 3 подробно описывается генерация на основе пользовательского ввода плотностей цвета, которые должны отслеживаться системой с несколькими роботами, а также стратегия выбора цвета, применяемая каждым роботом для своего цветного следа. Эксперименты, проведенные на группе роботов с дифференциальным приводом, представлены в разделе 4, где различные композиции окраски возникают в результате различных настроек с точки зрения возможностей окраски, закрепленных за роботами. Влияние этих разнородных ресурсов на конечные картины анализируется и обсуждается в разделе 5, в котором оценивается распределение цвета в картинах, как с помощью цветовых расстояний, так и с помощью хромоспектроскопии, и включается статистический анализ, который иллюстрирует согласованность результатов независимо от начальных условий в картине. термины позы роботов.Раздел 6 завершает статью.
В разделе 3 подробно описывается генерация на основе пользовательского ввода плотностей цвета, которые должны отслеживаться системой с несколькими роботами, а также стратегия выбора цвета, применяемая каждым роботом для своего цветного следа. Эксперименты, проведенные на группе роботов с дифференциальным приводом, представлены в разделе 4, где различные композиции окраски возникают в результате различных настроек с точки зрения возможностей окраски, закрепленных за роботами. Влияние этих разнородных ресурсов на конечные картины анализируется и обсуждается в разделе 5, в котором оценивается распределение цвета в картинах, как с помощью цветовых расстояний, так и с помощью хромоспектроскопии, и включается статистический анализ, который иллюстрирует согласованность результатов независимо от начальных условий в картине. термины позы роботов.Раздел 6 завершает статью.
2. Управление несколькими роботами на основе плотности
Интерактивная система рисования с несколькими роботами, представленная в этой статье, работает на основе задания желаемой концентрации различных цветов на холсте для рисования. Как указано в разделе 1, это превосходство цвета кодируется с помощью функций плотности цвета, которые пользователь-человек может установить в области, чтобы влиять на траектории роботов и, таким образом, создавать желаемый эффект окраски. В этом разделе мы напоминаем формулировку задачи управления покрытием, поскольку она служит математической основой для модальности взаимодействия человека и роя, рассматриваемой в этой статье.
Как указано в разделе 1, это превосходство цвета кодируется с помощью функций плотности цвета, которые пользователь-человек может установить в области, чтобы влиять на траектории роботов и, таким образом, создавать желаемый эффект окраски. В этом разделе мы напоминаем формулировку задачи управления покрытием, поскольку она служит математической основой для модальности взаимодействия человека и роя, рассматриваемой в этой статье.
2.1. Контроль покрытия
Задача контроля покрытия касается вопроса о том, как распределить команду из N роботов с позициями xi∈ℝd, i∈ {1,…, N} =: N, чтобы оптимально охватить экологические особенности домена D ∈ ℝ d , d = 2 и d = 3 для наземных и воздушных роботов соответственно. Вопрос о том, насколько хорошо команда покрывает область, обычно задается относительно функции плотности ϕ: D ↦ [0, ∞), которая кодирует важность точек в области (Cortes et al., 2004; Bullo et al., 2009). Обозначив совокупное положение роботов как x = [x1T,…, xNT] T, естественный способ распределения ответственности за покрытие между командой – позволить роботу i отвечать за те точки, которые находятся ближе всего к нему,
Обозначив совокупное положение роботов как x = [x1T,…, xNT] T, естественный способ распределения ответственности за покрытие между командой – позволить роботу i отвечать за те точки, которые находятся ближе всего к нему,
, то есть его ячейка Вороного относительно евклидова расстояния. Качество покрытия Robot i в зоне его доминирования можно закодировать как
hi (x) = ∫Vi (x) ‖xi-q‖2ϕ (q) dq, (1), где квадрат евклидова расстояния между положением робота и точками в пределах его доминирующей области отражает ухудшение восприятия с увеличением расстояния.Производительность группы, состоящей из нескольких роботов, в отношении ϕ может быть затем закодирована с помощью затрат на размещение в Cortes et al. (2004),
H (x) = ∑i = 1Nhi (x) = ∑i = 1N∫Vi (x) ‖xi-q‖2ϕ (q) dq, (2) с меньшим значением стоимости, соответствующим лучшему покрытию. Необходимым условием для минимизации (2) является то, что положение каждого робота соответствует центру масс его ячейки Вороного (Du et al. , 1999), задаваемой формулой
, 1999), задаваемой формулой
Эта пространственная конфигурация, называемая центроидной тесселяцией Вороного, может быть достигнута, если команда, состоящая из нескольких роботов, выполнит хорошо известный алгоритм Ллойда (Lloyd, 1982), в соответствии с которым
xi˙ = κ (Ci (x) -xi).(3) Сила затрат на размещение в (2) заключается в их способности влиять на то, в каких областях домена должны сконцентрироваться роботы, путем задания единственной функции плотности, ϕ, независимо от количества роботов в команде. Это делает контроль покрытия привлекательной парадигмой для взаимодействия человека и роя, как это было представлено в Diaz-Mercado et al. (2015), поскольку человек-оператор может влиять на коллективное поведение сколь угодно большого роя, задав единственную функцию плотности, например, рисование фигуры, касание или перетаскивание пальцами в интерфейсе, похожем на планшет. В этой статье, однако, мы рассматриваем сценарий, в котором оператор-человек может указать несколько функций плотности, связанных с разными цветами, которые должны быть окрашены, и, таким образом, необходимо учитывать контроллер, кодирующий такую цветовую неоднородность. В следующем разделе напоминается формулировка проблемы покрытия для групп, состоящих из нескольких роботов, с разнородными возможностями и законом управления, который позволяет роботам оптимально покрывать множество различных плотностей.
2.2. Контроль покрытия для команд с возможностями неоднородной окраски
Модальность взаимодействия человека и роя, рассматриваемая в этой статье, позволяет художнику определять набор функций плотности, связанных с разными цветами, для получения желаемой концентрации цветов на холсте. С этой целью мы восстанавливаем формулировку контроля гетерогенного покрытия в Santos and Egerstedt (2018). Пусть P будет набором цветов краски и ϕ j : D ↦ [0, ∞), j∈P, семейство плотностей, связанных с цветами в P, определенными в выпуклой области, D , я.е., холст для живописи. В практических приложениях доступность красок для каждого отдельного робота может быть ограничена из-за ограничений полезной нагрузки, истощения ресурсов или денежных ограничений. С этой целью пусть робот i , i∈N, оснащен подмножеством красок p (i) ⊂P, так что он может раскрашивать любой из этих цветов по отдельности или в цвет, полученный в результате их комбинации. Особенности стратегии смешивания цветов, выполняемой роботами, подробно описаны в разделе 3.
С этой целью пусть робот i , i∈N, оснащен подмножеством красок p (i) ⊂P, так что он может раскрашивать любой из этих цветов по отдельности или в цвет, полученный в результате их комбинации. Особенности стратегии смешивания цветов, выполняемой роботами, подробно описаны в разделе 3.
Аналогично (1) качество покрытия, выполняемое роботом i в отношении цвета j , может быть закодировано через стоимость местоположения
hij (x) = ∫Vij (x) ‖xi-q‖2ϕj (q) dq, (4), где Vij – область доминирования робота i по отношению к цвету j . Естественный выбор для определения границ Vij – это для робота i рассмотреть тех роботов в команде, способных раскрашивать цвет j , которые наиболее близки к нему.Если обозначить Nj набор роботов с Color j ,
Nj = {i∈N | j∈p (i) ⊂P},, то область доминирования робота i по отношению к цвету j ∈ p ( i ) является ячейкой Вороного в тесселяции, генераторами которой являются роботы в Nj,
Vij (x) = {q∈D | ‖Xi-q‖≤‖xk-q‖, ∀k∈Nj}.
Обратите внимание: если робот i является единственным роботом, оснащенным цветом j , то робот отвечает за покрытие всего холста, т.е.е., Vij = D. В соответствии с этой стратегией разделения, как показано на рисунке 2, область, за которую отвечает робот i по отношению к цвету j , Vij, может отличаться от контролируемой области по отношению к цвету k , Vik, j, k ∈ p ( i ).
Рисунок 2 . Области доминирования четырех соседних роботов по цветам: синий (1) (A) и красный (2) (B) . Для каждого цвета результирующие ячейки Вороного генерируются только теми роботами, у которых есть этот цвет окраски.Источник: адаптировано из Santos and Egerstedt (2018).
Определив регионы доминирования, мы можем теперь оценить стоимость в (4). Таким образом, общая производительность команды может быть оценена путем рассмотрения полного набора роботов и цветного оборудования через разнородные затраты на размещение , сформулированные в Santos and Egerstedt (2018),
Hhet (x) = ∑j∈P∑i∈Nj∫Vij (x) ‖xi-q‖2ϕj (q) dq, (5) с меньшим значением стоимости, соответствующим лучшему охвату области по отношению к семейству функций плотности цвета ϕ j , j∈P.
Позволив роботу i следовать отрицательному градиентному спуску Хета, устанавливается следующий закон управления.
Теорема 1 (Гетерогенный градиентный спуск, Сантос и Эгерштедт, 2018). Пусть робот i, с плоским положением x i , эволюционирует в соответствии с законом управления xi˙ = ui, , где
ui = κ∑j∈p (i) Mij (x) (Cij (x) -xi), (6)с Mij (x) и Cij (x), соответственно, неоднородная масса и центр масс робота i относительно цвета j, определяемого как
Mij (x) = ∫Vij (x) ϕj (q) dq, Cij (x) = ∫Vij (x) qϕj (q) dqMij (x).(7)Затем при t → ∞, роботы сходятся к критической точке неоднородных затрат на размещение в (5) при положительном усилении κ> 0 .
Доказательство : см. Santos and Egerstedt (2018).
Следовательно, контроллер, который минимизирует неоднородные затраты на размещение в (5), заставляет каждого робота двигаться в соответствии с взвешенной суммой, где каждый член соответствует непрерывному спуску Ллойда – аналогично (3) – с определенной плотностью цвета ϕ j , взвешенный по массе, соответствующей этой способности окраски.
Контроллер в (6), таким образом, обеспечивает эффективную модальность взаимодействия человека и роя для целей рисования, когда художник-человек должен только указать функции плотности цвета для желаемой цветовой композиции, а контроллер позволяет роботам в команде распределяться по холсту. в зависимости от их неоднородных способностей к окраске. Обратите внимание, что в то время как другие парадигмы взаимодействия человека и роя, основанные на управлении покрытием, учитывают изменяющуюся во времени плотность для моделирования входных данных, предоставляемых внешним оператором (Diaz-Mercado et al., 2015), в приложении, рассматриваемом в этой статье, неоднородная формулировка задачи управления покрытием с учетом статических плотностей достаточна для моделирования обмена информацией между человеком и системой с несколькими роботами.
3. От контроля покрытия к покраске
В разделе 2 мы установили парадигму взаимодействия человека и роя, которая позволяет пользователю влиять на команду роботов, чтобы они распределялись по холсту в соответствии с желаемым распределением цвета и их способностями рисования. Но как на самом деле создается картина? В этом разделе мы представляем стратегию, которая позволяет каждому роботу выбирать пропорцию, в которой цвета, доступные в его оборудовании, должны быть смешаны, чтобы создавать картины, отражающие, насколько это возможно, распределение цветов, указанное пользователем.
Но как на самом деле создается картина? В этом разделе мы представляем стратегию, которая позволяет каждому роботу выбирать пропорцию, в которой цвета, доступные в его оборудовании, должны быть смешаны, чтобы создавать картины, отражающие, насколько это возможно, распределение цветов, указанное пользователем.
Система с несколькими роботами, рассматриваемая в этой статье, предназначена для создания картины с помощью каждого робота, оставляющего цветной след, когда он движется по белому холсту. Хотя в картинах, представленных в разделе 4, используется не физическая краска, а скорее спроецированные следы на испытательном стенде роботов, цель этого раздела – представить цветовую модель, которая позволяет обеим роботам создавать широкий диапазон цветов с минимальным оборудованием для окраски. и это точно отражает то, как смешение цветов могло бы происходить в сценарии, где должна была использоваться физическая краска.С этой целью, чтобы представить реалистичный сценарий, в котором роботы накладывают физическую краску на холст, мы используем модель субтрактивного смешения цветов (см. Подробное обсуждение смешения цветов в Berns, 2000), которая описывает, как должны быть красители и чернила. комбинированные на белом фоне для поглощения разных длин волн белого света для создания разных цветов. В этой модели основными цветами, которые служат основой для создания всех других цветовых комбинаций, являются голубой, пурпурный и желтый (CMY).
Подробное обсуждение смешения цветов в Berns, 2000), которая описывает, как должны быть красители и чернила. комбинированные на белом фоне для поглощения разных длин волн белого света для создания разных цветов. В этой модели основными цветами, которые служат основой для создания всех других цветовых комбинаций, являются голубой, пурпурный и желтый (CMY).
Использование простой модели, такой как CMY, имеет двойное преимущество.Во-первых, можно указать желаемое присутствие произвольного цвета на холсте, указав, в какой пропорции они должны смешиваться в каждой точке, а, во-вторых, система с несколькими роботами в совокупности может генерировать большое разнообразие цветов, используя только голубой , пурпурной и желтой краской, т. е. P = {C, M, Y} в гетерогенной стратегии управления несколькими роботами в разделе 2.2. Первый аспект снижает сложность взаимодействия между человеком и системой с несколькими роботами: художник может указать желаемый набор цветов C по всему холсту, задав CMY-представление каждого цвета β∈C как [βC, βM, βY], βj∈ [0,1], j∈P, и его функция плотности по холсту ϕ β ( q ), q ∈ D .![]() Обратите внимание, что цвет, указанный в цветовой модели RGB (красный, зеленый и синий), представленный тройным [β R , β G , β B ], можно напрямую преобразовать в представление CMY путем вычитания значений RGB из 1, то есть [β C , β M , β Y ] = 1 – [β R , β G , β B ]. Учитывая, что возможности окраски системы с несколькими роботами задаются выражением P = {C, M, Y}, плотности, которые роботы должны покрывать в соответствии с формулировкой неоднородного покрытия в разделе 2.2 можно получить как,
Обратите внимание, что цвет, указанный в цветовой модели RGB (красный, зеленый и синий), представленный тройным [β R , β G , β B ], можно напрямую преобразовать в представление CMY путем вычитания значений RGB из 1, то есть [β C , β M , β Y ] = 1 – [β R , β G , β B ]. Учитывая, что возможности окраски системы с несколькими роботами задаются выражением P = {C, M, Y}, плотности, которые роботы должны покрывать в соответствии с формулировкой неоднородного покрытия в разделе 2.2 можно получить как,
, где ⊕ – правильно выбранный оператор композиции. Выбор оператора композиции отражает то, как следует комбинировать плотности, связанные с разными цветами, для вычисления общей функции плотности, связанной с каждым основным цветом CMY. Например, одним из способов объединения функций плотности является вычисление максимального значения в каждой точке,
ϕj (q) = maxβ∈Cβjϕβ (q), j∈P.
Остается вопрос, как робот должен комбинировать доступные пигменты в своем цветовом следе, чтобы отразить желаемые функции плотности цвета.Формулировка неоднородной стоимости размещения в (5) подразумевает, что робот i отвечает за покрытие цвета j в пределах доминирующего региона Vij и за покрытие цвета k в пределах Vik, j, k∈p (i) ⊂ П. Однако в зависимости от значений плотностей ϕ j и ϕ k внутри этих ячеек Вороного соотношение между соответствующими обязанностями покрытия может быть несбалансированным. Фактически, такие обязанности естественным образом отражаются через неоднородную массу Mij (x), определенную в (7).Обозначим как [αiC, αiM, αiY], αij∈ [0,1], αiC + αiM + αiY = 1, пропорцию цвета в основе CMY, которая будет использоваться роботом i в его следе окраски. Затем стратегия смешивания цветов, которая отражает обязанности робота i по охвату, может быть дана следующим образом:
αij = Mij (x) ∑k∈p (i) Mik (x), j∈p (i) ⊂P. (8)
(8)Обратите внимание, что когда Mij (x) = 0, ∀j∈p (i) ⊂P, робот не покрывает никакой плотности и, следовательно, αij, j∈P может быть неопределенным.
Рисунок 3 иллюстрирует работу этого механизма окраски для трех различных спецификаций плотности цвета.Во-первых, механизм моделируется для робота, оснащенного всеми тремя цветами – голубым (C), пурпурным (M) и желтым (Y) – на рисунках 3A, C, E. Как видно, робот оставляет голубой след, когда он движется, чтобы оптимально покрыть одну функцию плотности голубого цвета на Рисунке 3A. На рисунке 3C указаны две разные функции плотности, одна пурпурная и одна желтая, и робот прокладывает след, цвет которого является комбинацией обеих красок. Наконец, на рисунке 3E роботу поручено покрыть плотность, которая представляет собой комбинацию цветов CMY.Поскольку робот оснащен всеми тремя цветами, след на холсте точно повторяет цвета, желаемые пользователем.
Рисунок 3 . Механизм покраски основан на контроле неоднородного покрытия. На каждой подфигуре показаны цветовые следы, проложенные роботами (слева) по мере их движения, чтобы оптимально покрыть заданную пользователем функцию плотности цвета (справа), запустив контроллер в (6). Символы, расположенные справа от робота, указывают на его способности рисования. (A, C, E) Покажите работу механизма окраски в разделе 3 для одного робота, оснащенного всеми тремя цветами, т.е.е., голубой (C), пурпурный (M) и желтый (Y), что позволяет создавать все цветовые комбинации на основе CMY. В (A) робот оставляет голубой след в соответствии со спецификацией плотности цвета β 1 . Робот равномерно смешивает пурпурный и желтый в (C) в соответствии со стратегией смешивания цветов в (8), создавая цвет между двумя спецификациями плотности цвета, β 2 и β 3 . Наконец, в (E) робот точно воспроизводит цвет, указанный β 4 .С другой стороны, (B, D, F) изображают работу механизма рисования с командой из 3 роботов, где ячейки Вороного (с цветовой кодировкой в соответствии с CMY) показаны на субфигурках плотности.
На каждой подфигуре показаны цветовые следы, проложенные роботами (слева) по мере их движения, чтобы оптимально покрыть заданную пользователем функцию плотности цвета (справа), запустив контроллер в (6). Символы, расположенные справа от робота, указывают на его способности рисования. (A, C, E) Покажите работу механизма окраски в разделе 3 для одного робота, оснащенного всеми тремя цветами, т.е.е., голубой (C), пурпурный (M) и желтый (Y), что позволяет создавать все цветовые комбинации на основе CMY. В (A) робот оставляет голубой след в соответствии со спецификацией плотности цвета β 1 . Робот равномерно смешивает пурпурный и желтый в (C) в соответствии со стратегией смешивания цветов в (8), создавая цвет между двумя спецификациями плотности цвета, β 2 и β 3 . Наконец, в (E) робот точно воспроизводит цвет, указанный β 4 .С другой стороны, (B, D, F) изображают работу механизма рисования с командой из 3 роботов, где ячейки Вороного (с цветовой кодировкой в соответствии с CMY) показаны на субфигурках плотности.
Для тех же характеристик входной плотности на рисунках 3B, D, F показаны следы, созданные командой из трех роботов, оснащенных различными подмножествами цветовых возможностей. Как видно, цвет отдельных следов робота изменяется в зависимости от оборудования робота, оборудования его соседей и заданных функций входной плотности.Моделирование, изображающее работу этого механизма окраски, можно найти в видео, включенном в дополнительные материалы.
4. Экспериментальные результаты с прогнозируемыми трассами
Предлагаемая система окраски с несколькими роботами реализована на Роботариуме, дистанционно доступном испытательном стенде роевой робототехники в Технологическом институте Джорджии (Wilson et al., 2020). Эксперименты, загружаемые через Интернет, выполняются удаленно командой, состоящей из до 20 роботов с дифференциальным приводом, изготовленных по индивидуальному заказу.На каждой итерации, работающей с максимальной частотой 120 Гц, Роботариум предоставляет позы роботов, отслеживаемых системой захвата движения, и позволяет управляющей программе определять линейные и угловые скорости, которые должны выполняться каждым роботом в команде. . Проектор позволяет визуализировать изменяющиеся во времени изображения на испытательном стенде во время проведения экспериментов. Данные становятся доступными для пользователя после завершения эксперимента.
. Проектор позволяет визуализировать изменяющиеся во времени изображения на испытательном стенде во время проведения экспериментов. Данные становятся доступными для пользователя после завершения эксперимента.
Парадигма взаимодействия человека и роя для покрытия плотности цвета, представленная в разделе 2, и стратегия смешивания цветов следа из раздела 3 экспериментально проиллюстрированы на группе из 12 роботов и 2.Холст 4х2м. Роботы оставляют следы цвета, поскольку они покрывают набор определяемых пользователем функций плотности цвета в соответствии с законом управления в (6), где κ = 1 для всех экспериментов, а динамика единого интегратора ui, i∈N преобразуется в линейную и угловые скорости, выполняемые роботами с использованием почти идентичного диффеоморфизма из Olfati-Saber (2002), функции, доступной в библиотеках Robotarium. Чтобы изучить, как ограниченная доступность ресурсов для окраски влияет на результирующую окраску, для одной и той же задачи окраски рассматриваются девять различных экспериментальных установок с точки зрения оборудования для окраски, назначенного команде с несколькими роботами. Хотя в экспериментах, включенных в этот документ, физическая краска не используется, эффективность предлагаемой системы рисования иллюстрируется путем визуализации следов движения роботов по холсту с помощью диапроектора.
Хотя в экспериментах, включенных в этот документ, физическая краска не используется, эффективность предлагаемой системы рисования иллюстрируется путем визуализации следов движения роботов по холсту с помощью диапроектора.
Эксперимент рассматривает сценарий, в котором команда, состоящая из нескольких роботов, должна одновременно покрыть в общей сложности шесть различных функций плотности цвета на временном горизонте 300 с. Эти функции плотности предназначены для представления команд, которые будут интерактивно генерироваться пользователем, который будет наблюдать за создаваемой картиной и может изменять команды для плотности цвета в соответствии со своими художественными замыслами.Обратите внимание, что в этой статье эти изменяющиеся во времени функции плотности являются общими для всех экспериментов и моделирования, включенных в разделы 4, 5, чтобы дать возможность оценить картины в зависимости от настроек оборудования в таблице 2. В интерактивном сценарии, команды плотности должны генерироваться пользователем в реальном времени, например, посредством интерфейса, подобного планшету. В этом эксперименте задействованные функции плотности цвета имеют вид
В этом эксперименте задействованные функции плотности цвета имеют вид
с β∈ {1,…, 6} = C, q = [ q x , q y ] T ∈ D .Цвет, связанный с каждой плотностью, а также ее параметры указаны в таблице 1, а μ̄x и μ̄y задаются как
μ̄x = μx-Axsin (2πfxt), μ̄y = μy-Aysin (2πfyt).Рисунок 4 иллюстрирует эволюцию окраски для конкретной установки оборудования, когда роботы перемещаются, чтобы покрыть эти плотности при т = 100 с и т = 300 с.
Таблица 1 . Экспериментальные параметры, связанные с заданными пользователем функциями плотности цвета.
Рисунок 4 .Эволюция рисунка в соответствии с параметрами плотности в Таблице 1 для Установки 3, представленной в Таблице 2. Роботы распределяются по области, чтобы отслеживать функции плотности по мере того, как они развиваются через холст. На каждом снимке плотности, которые команда с несколькими роботами отслеживает в этот конкретный момент времени, показаны в правом нижнем углу изображения. Цветовое распределение цветовых следов отражает цвета, указанные для функций плотности в пределах возможностей рисования роботов.Несмотря на то, что ни один из роботов не оснащен полным оборудованием CMY и, таким образом, не может точно воспроизводить цвета, указанные пользователем, интеграция цветов с течением времени дает результат, близкий к спецификации плотности пользователя.
На каждом снимке плотности, которые команда с несколькими роботами отслеживает в этот конкретный момент времени, показаны в правом нижнем углу изображения. Цветовое распределение цветовых следов отражает цвета, указанные для функций плотности в пределах возможностей рисования роботов.Несмотря на то, что ни один из роботов не оснащен полным оборудованием CMY и, таким образом, не может точно воспроизводить цвета, указанные пользователем, интеграция цветов с течением времени дает результат, близкий к спецификации плотности пользователя.
Стратегия покраски с участием нескольких роботов оценивается в рамках серии настроек окрасочного оборудования для оценки различий, возникающих в результате неоднородности команды, которая может быть мотивирована нехваткой или истощением ресурсов покраски или выбором конструкции человека-пользователя. , Например.В таблице 2 представлены возможности окраски в цвет, доступные каждому из роботов в различных экспериментальных установках. Картины, полученные в результате пяти из этих конфигураций (те, которые имеют нечетный идентификатор установки), показаны на рисунке 5. Процесс генерации рисунков на рисунке 5 проиллюстрирован на видео, включенном в дополнительные материалы. Обратите внимание, что все эти эксперименты проводились с идентичными начальными условиями с точки зрения поз робота в соответствии с идентификаторами в таблице 2. В целях сравнительного анализа создается смоделированная картина для установки окраски 1, т.е.е., с однородным оборудованием, способным воспроизводить любой цвет. Эта смоделированная картина создается с использованием тех же стратегий управления неоднородной плотностью и смешивания цветов, что и в экспериментах с роботами, но с учетом динамики одноколесного велосипеда без ограничений или насыщенности исполнительных механизмов и без задержек связи (рис. 5A). Учитывая рисунки на рисунках 5B – F, мы можем наблюдать, как наиболее близкое распределение цвета к смоделированному рисунку достигается на рисунке 5B, что соответствует случаю, когда все роботы имеют все возможности рисования, т.е.д., команда однородна – и, таким образом, может воспроизвести любую комбинацию цветов на основе CMY.
Процесс генерации рисунков на рисунке 5 проиллюстрирован на видео, включенном в дополнительные материалы. Обратите внимание, что все эти эксперименты проводились с идентичными начальными условиями с точки зрения поз робота в соответствии с идентификаторами в таблице 2. В целях сравнительного анализа создается смоделированная картина для установки окраски 1, т.е.е., с однородным оборудованием, способным воспроизводить любой цвет. Эта смоделированная картина создается с использованием тех же стратегий управления неоднородной плотностью и смешивания цветов, что и в экспериментах с роботами, но с учетом динамики одноколесного велосипеда без ограничений или насыщенности исполнительных механизмов и без задержек связи (рис. 5A). Учитывая рисунки на рисунках 5B – F, мы можем наблюдать, как наиболее близкое распределение цвета к смоделированному рисунку достигается на рисунке 5B, что соответствует случаю, когда все роботы имеют все возможности рисования, т.е.д., команда однородна – и, таким образом, может воспроизвести любую комбинацию цветов на основе CMY.
Таблица 2 . Покрасочное оборудование для различных экспериментальных установок.
Рисунок 5 . Рисунки, созданные для плотностей в (9), с командой из 12 роботов на своих конечных позициях. (A) Соответствует смоделированной окраске и используется для сравнительного анализа. В соответствии с настройками окрасочного оборудования в Таблице 2 мы можем увидеть, как по мере того, как роботы в команде имеют больше возможностей рисования, цветовые градиенты становятся более плавными и более похожими на идеальный результат.
Интересно отметить существенные изменения характеристик окраски для различных конфигураций оборудования роботов. Для установок оборудования 3, 5, 7 и 9, где некоторые роботы – или все – не оснащены всеми цветными красками, соответствующие рисунки не показывают такие плавные цветовые градиенты, как на рисунке 5B. Однако распределение цвета для этих наборов красок по-прежнему качественно отражает спецификацию цвета, представленную плотностями в таблице 1. Даже в крайнем случае оборудования 9 (см. Рис. 5F), где ни один из роботов не оснащен всеми красками CMY – фактически, половина роботов имеет только одну краску, а другая половина имеет парные комбинации – команда роботов все еще отображает рисунок, который, хотя и представляет цвета с менее плавным смешиванием, чем другие настройки, по-прежнему представляет распределение цвета, указанное плотностями в таблице 1. Для настроек 3 и 7 команда имеет такое же общее количество возможностей рисования CMY, но распределение разные среди членов команды: в Настройке 3 ни один из роботов не оснащен тремя цветами, в то время как в Настройке 7 есть некоторые люди, которые могут рисовать любую комбинацию CMY, а другие могут рисовать только один цвет.Наблюдая за рисунками 5C, E, в то время как результирующие цвета менее яркие для оборудования в настройке 3, кажется, что между ними наблюдается более плавное смешение по вертикальной оси. Настройка 7 создает картину, в которой в целом цвета более соответствуют идеальному результату, представленному на рисунке 5A, но также содержат более сильные следы, соответствующие чистым основным цветам, появляющимся по всей картине.
Даже в крайнем случае оборудования 9 (см. Рис. 5F), где ни один из роботов не оснащен всеми красками CMY – фактически, половина роботов имеет только одну краску, а другая половина имеет парные комбинации – команда роботов все еще отображает рисунок, который, хотя и представляет цвета с менее плавным смешиванием, чем другие настройки, по-прежнему представляет распределение цвета, указанное плотностями в таблице 1. Для настроек 3 и 7 команда имеет такое же общее количество возможностей рисования CMY, но распределение разные среди членов команды: в Настройке 3 ни один из роботов не оснащен тремя цветами, в то время как в Настройке 7 есть некоторые люди, которые могут рисовать любую комбинацию CMY, а другие могут рисовать только один цвет.Наблюдая за рисунками 5C, E, в то время как результирующие цвета менее яркие для оборудования в настройке 3, кажется, что между ними наблюдается более плавное смешение по вертикальной оси. Настройка 7 создает картину, в которой в целом цвета более соответствуют идеальному результату, представленному на рисунке 5A, но также содержат более сильные следы, соответствующие чистым основным цветам, появляющимся по всей картине. Если мы сравним рисунки 5D, E, мы увидим, как, добавляя небольшое количество возможностей рисования в систему, цветовые градиенты постепенно сглаживаются.Это наблюдение предлагает продолжить анализ вариаций, которые появляются на картинах в зависимости от разнородных конфигураций оборудования различных установок. Этому будет посвящен следующий раздел.
Если мы сравним рисунки 5D, E, мы увидим, как, добавляя небольшое количество возможностей рисования в систему, цветовые градиенты постепенно сглаживаются.Это наблюдение предлагает продолжить анализ вариаций, которые появляются на картинах в зависимости от разнородных конфигураций оборудования различных установок. Этому будет посвящен следующий раздел.
5. Анализ и обсуждение
Как описано в разделе 1, роботизированная система окраски, разработанная в этом документе, генерирует иллюстрации посредством взаимодействия между функциями плотности цвета, заданными пользователем, и различным цветовым оборудованием, присутствующим на роботах.В частности, различное оборудование не только влияет на цветовые следы, оставленные роботами, но также влияет на их движение, поскольку они отслеживают функции плотности, соответствующие их оборудованию. Рисунок 5 качественно демонстрирует, как характер окраски меняется в зависимости от настроек оборудования, в этом разделе представлен количественный анализ различий между рисунками, возникающих в результате разной настройки оборудования. Мы также анализируем характеристики воспроизводимости системы окраски с несколькими роботами, исследуя, как картины различаются между различными реализациями с использованием одних и тех же настроек оборудования.
Мы также анализируем характеристики воспроизводимости системы окраски с несколькими роботами, исследуя, как картины различаются между различными реализациями с использованием одних и тех же настроек оборудования.
Пусть S обозначает количество различных установок оборудования роботов в команде, где каждая уникальная конфигурация обозначает робота вида . Обозначим s ι ∈ [0, 1] как вероятность того, что случайно выбранный агент принадлежит к виду ι, ι∈S = {1,…, S}, так что
Ι = 1Ssι = 1 и s = [s1,…, sS] T.Для каждой настройки оборудования в таблице 2 эти вероятности могут быть рассчитаны как функция от количества агентов, оснащенных каждым подмножеством цветов краски.
Мы принимаем характеристику, разработанную Twu et al. (2014), и количественно оценить неоднородность команды, состоящей из нескольких роботов, как,
H (s) = E (s) Q (s), (10), где E ( s ) представляет сложность и Q ( s ), неравенство в системе с несколькими роботами для данной экспериментальной установки, s . Более конкретно, E ( s ) может быть смоделирован как энтропия многоагентной системы,
Более конкретно, E ( s ) может быть смоделирован как энтропия многоагентной системы,
и Q ( s ) – квадратичная энтропия Рао ,
Q (s) = ∑ι = 1S∑κ = 1Ssιsκδ (ι, κ) 2, (11) с δ: S × S↦ℝ + метрическое расстояние между видами роботов.Более конкретно, δ представляет собой различия между способностями различных видов в контексте выполнения конкретной задачи . Например, если у нас есть три робота, один принадлежит к виду s 5 ( p ( s 5 ) = { C }) и два принадлежат виду s 8 ( p ( s 8 ) = { C, M, Y }) и мы должны раскрасить только голубой цвет, тогда расстояние между агентами должно быть равно нулю, поскольку все они могут выполнять одну и ту же задачу.Однако, если бы задача заключалась в том, чтобы нарисовать комбинацию желтого и пурпурного, тогда виды s 5 не могли бы способствовать этой задаче и, следовательно, δ> 0.
Аналогично Twu et al. (2014) мы формализуем эту идею, введя пространство задач, представленное кортежем ( T , γ), где T обозначает набор задач, а γ: T ↦ ℝ + представляет связанный вес. функция. В этой статье набор задач T просто соответствует разным цветам, указанным пользователем, как показано в Таблице 1.Следовательно, задача tβj∈T соответствует компоненту j , j ∈ { C, M, Y } цветового ввода β∈C. Соответствующие весовые функции для задач рассчитываются как,
γ (tβj) = βj∑β ~ ∈C∑k∈Pβ ~ k.С этим пространством задач карта задач ω: S↦2T, как определено в Twu et al. (2014) напрямую связывает разные виды роботов с цветами CMY, т. Е. Если цветовое оборудование вида ι обозначено как p (ι), то он может выполнять задачи tβj, если j ∈ p (ι ).
Определив пространство задач ( T , γ) и карту задач ω, можно вычислить расстояние между двумя агентами i и j , как в Twu et al. (2014),
(2014),
Эта зависящая от задачи метрика расстояния между разными видами роботов может затем использоваться для вычисления несоответствия , как показано в (11).
Полностью охарактеризовав несоответствие, Q ( s ), и сложность, E ( s ) экспериментальной установки для конкретной задачи окраски, можно вычислить меру неоднородности, связанную с ними, в соответствии с (10).С этой целью третий столбец в таблице 2 представляет меру неоднородности различных установок. Значения неоднородности были вычислены для задачи рисования заката из таблицы 1, а также для общей задачи рисования, которая рассматривает весь 8-битный цветовой спектр RGB как объективные цвета, которые должна раскрасить команда. Эта последняя задача представлена в данном анализе с целью использования в качестве основы для оценки полноты предлагаемой задачи рисования заката. Как видно из Таблицы 2, значения неоднородности, полученные для задач заката и 8-битной RGB-задачи, весьма схожи, а относительное упорядочение установок относительно меры неоднородности такое же, что позволяет предположить, что использованная задача заката в этой статье требуется достаточно разнообразный набор задач окраски для всех предлагаемых настроек оборудования. Вооружившись этой количественной оценкой неоднородности команды, мы теперь анализируем, как пространственные характеристики рисунка различаются при изменении конфигурации оборудования.
Вооружившись этой количественной оценкой неоднородности команды, мы теперь анализируем, как пространственные характеристики рисунка различаются при изменении конфигурации оборудования.
5.1. Цветовое расстояние
Сначала мы анализируем сложное взаимодействие между следами движения и настройками оборудования, вычисляя пространственное расстояние между средним положением желаемой функции плотности ввода, заданной пользователем, и результирующим проявлением цвета на картине. Для этого мы используем метрику цветового расстояния , введенную в Androutsos et al.(1998), чтобы охарактеризовать расстояние от цвета, полученного в каждом пикселе результирующей картины, до каждого из входных цветов, указанных в таблице 1.
Пусть ρ ( q ) представляет 8-битное значение вектора RGB для данного пикселя q в рисовании. Тогда цветовое расстояние между двумя пикселями q i и q j задается как,
dp (qi, qj) = 1- [1-2πcos-1 (ρ (qi) · ρ (qj) ‖ρ (qi) ‖‖ρ (qj) ‖)] [1-‖ρ (qi) -ρ ( qj) ‖3 · 2552] (12) Используя (12), мы можем вычислить расстояние от цвета каждого пикселя до каждого из входных цветов, заданных пользователем (приведенных в этой статье в Таблице 1). Для данного пикселя в картине q и входного цвета β эти расстояния можно интерпретировать как функцию плотности цветового расстояния по области, обозначенную как φ
Для данного пикселя в картине q и входного цвета β эти расстояния можно интерпретировать как функцию плотности цветового расстояния по области, обозначенную как φ
, где, со злоупотреблением обозначениями, d p ( q , β) представляет собой цветовое расстояние между цветом β и цветом в пикселе q . Для экспериментов, проведенных в этой статье, 2 было выбрано равным 0,1.
Поскольку мы заинтересованы в понимании пространственных характеристик цветов в картине, мы вычисляем центр масс конкретного цвета β в картине,
Cβ = ∫Dqφ (q, β) dq∫Dφ (q, β) dq.(13)Ковариационный эллипс для цвета β в пикселе q задается как,
Vβ (q) = (φ (q)) (q-Cβ). (14) Для каждого из входных цветов рисунок 6 иллюстрирует степень, в которой цветовой центр масс (вычисленный по (13) и изображенный квадратом, заполненным соответствующим цветом) отличается от средних положений функций входной плотности (изображенных по кругу). Для всех установок окрасочного оборудования на Рисунке 6 по мере того, как неоднородность команды увеличивается, среднее значение функции входной плотности для каждого цвета и результирующий центр масс становятся все более удаленными.Это явление проиллюстрировано на рисунке 7, где среднее расстояние между входной плотностью и результирующим центром масс цвета нанесено как функция неоднородности оборудования роботов. Для данной картины P это расстояние вычисляется как,
Для всех установок окрасочного оборудования на Рисунке 6 по мере того, как неоднородность команды увеличивается, среднее значение функции входной плотности для каждого цвета и результирующий центр масс становятся все более удаленными.Это явление проиллюстрировано на рисунке 7, где среднее расстояние между входной плотностью и результирующим центром масс цвета нанесено как функция неоднородности оборудования роботов. Для данной картины P это расстояние вычисляется как,
, где C представляет собой набор входных цветов, а μ β представляет собой среднее значение функции входной плотности для цвета β. Как видно, с увеличением неоднородности среднее расстояние увеличивается, потому что меньшие возможности рисования на роботах не позволяют им точно воспроизводить входные распределения цветов.Однако даже с сильно разнородными установками, такими как Установки 7 или 9, команда, состоящая из нескольких роботов, по-прежнему может сохранять четко различимое цветовое распределение по всему холсту, что говорит о том, что парадигма контроля покрытия для рисования с участием нескольких роботов является достаточно надежной или очень высокой. разнородные команды роботов и нехватка ресурсов.
разнородные команды роботов и нехватка ресурсов.
Рисунок 6 . Для каждого входного цвета (приведенного в таблице 1): среднее значение функции входной плотности (кружок) и центр масс результирующего цвета согласно (13) (квадрат).Пунктирными линиями изображен ковариационный эллипс согласно (14). Как видно, неоднородность команды, состоящей из нескольких роботов [как определено в (10)], влияет на то, как далеко окрашиваются цвета от места ввода, заданного пользователем.
Рисунок 7 . Среднее расстояние от входной средней плотности до результирующего центра масс по входным цветам картины как функция неоднородности среди роботов [как определено в (10)]. Как видно, с увеличением разреженности окрасочного оборудования на роботах (что выражается увеличением неоднородности) среднее расстояние увеличивается, указывая на то, что цвета проявляются дальше от того места, где их указывает пользователь.
5.2. Хромоспектроскопия
Второй метод, который мы используем для количественной оценки различий между картинами в зависимости от неоднородности в команде роботов, – это хромоспектроскопия (Kim et al. , 2014), которая анализирует частоту появления определенного цвета на холсте. . С этой целью картина делится в соответствии с секторами, описанными в таблице 3, которые тесно связаны с областями высокой встречаемости объективных плотностей цвета в таблице 1.Гистограмма, представляющая частоту появления каждого входного цвета на сектор, описана на рисунке 8. Для целей хромоспектроскопического анализа 8-битная цветовая карта RGB холста преобразуется в 5-битную цветовую карту RGB путем уменьшения разрешение цветовой карты и группировка очень похожих цветов вместе, т. е. для входного цвета β ∈ [0, 255] 3 измененный цвет для анализа хромоспектроскопии на рисунке 8 вычисляется как β̄ = βb, с b = 2 3 .
Таблица 3 . Цветные секторы по всей картине, использованные для хромоспектроскопического анализа, в соответствии с параметрами плотности, указанными в таблице 1.
Рисунок 8 . Хромоспектроскопия по секторам на холсте (как указано в таблице 3) для каждой конфигурации оборудования (как указано в таблице 2). По мере возрастания неоднородности и, как следствие, более редких возможностей рисования роботов, цвета, явно отличающиеся от целевых цветов, начинают появляться в каждом секторе.Для команд с более низкой неоднородностью (установки 1 и 3) аномальные цвета на хромоспектроскопии обычно появляются только из соседних секторов.
По мере возрастания неоднородности и, как следствие, более редких возможностей рисования роботов, цвета, явно отличающиеся от целевых цветов, начинают появляться в каждом секторе.Для команд с более низкой неоднородностью (установки 1 и 3) аномальные цвета на хромоспектроскопии обычно появляются только из соседних секторов.
Как видно на рисунке 8, неоднородность команды роботов существенно влияет на результирующее цветовое распределение в каждом секторе. Точнее говоря, по мере того, как неоднородность команды увеличивается, тем самым лишая команду возможностей рисования, холст представляет все больше необычных цветов, которые присутствуют за пределами соответствующих целевых секторов.Это очевидно в сильно разнородных командах (установка 9), где пурпурные цвета появляются в самом верхнем секторе, а голубой – в центральном. В трех центральных секторах часто встречаются нецелевые цвета. Для немного менее разнородных команд, хотя встречающиеся цвета часто не соответствуют целевым цветам в секторах – например, зеленый в Секторе 4 Установки 3 – цвета кажутся согласованными в их присутствии и соответствуют ограничениям на оборудование роботов. : в настройке 3 все роботы оснащены только двумя цветами, поэтому ни один робот не может самостоятельно точно воспроизвести любой целевой цвет с 3 компонентами CMY.В случае команд с низкой неоднородностью, например, Setup 1 и Setup 3, результирующие цвета в основном соответствуют исходным целевым цветам. Наличие некоторых цветов, не совпадающих с вводом, соответствует цветам, принадлежащим соседним секторам. Некоторые конкретные примеры этого включают: (i) Вариант 1: наличие желтого в Секторе 3, оранжевого в Секторе 2 и синего в Секторе 5, (ii) Вариант 3: присутствие оранжевого цвета в Секторе 1 и синего в Секторе. 5, (iii) Вариант 5: пурпурный и голубой цвета в секторе 4.
: в настройке 3 все роботы оснащены только двумя цветами, поэтому ни один робот не может самостоятельно точно воспроизвести любой целевой цвет с 3 компонентами CMY.В случае команд с низкой неоднородностью, например, Setup 1 и Setup 3, результирующие цвета в основном соответствуют исходным целевым цветам. Наличие некоторых цветов, не совпадающих с вводом, соответствует цветам, принадлежащим соседним секторам. Некоторые конкретные примеры этого включают: (i) Вариант 1: наличие желтого в Секторе 3, оранжевого в Секторе 2 и синего в Секторе 5, (ii) Вариант 3: присутствие оранжевого цвета в Секторе 1 и синего в Секторе. 5, (iii) Вариант 5: пурпурный и голубой цвета в секторе 4.
Действительно, как и следовало ожидать, хромоспектроскопия показывает, что распределение цветов становится менее точным по мере того, как различия в способностях рисования роботов становятся более острыми – наблюдаемыми как отдельные полосы краски на рисунке 5, которые выделяются из окружающих цветов. Тем не менее, распределение цветов в каждом секторе по-прежнему соответствует входным параметрам плотности цвета даже в случае сильно разнородных команд, что предполагает, что парадигма рисования с несколькими роботами, представленная в этой статье, устойчива к ограниченным возможностям рисования в группе с несколькими роботами из-за ограничениям доступных красок, ограничениям полезной нагрузки на роботизированных платформах или даже внутреннему истощению ресурсов, которое может возникнуть в результате рисования.
5.3. Статистические результаты
Чтобы понять, остается ли приведенная выше статистика согласованной для нескольких рисунков, созданных роботизированной системой окраски, мы провели 10 различных экспериментов со случайными начальными условиями с точки зрения поз роботов для каждой из 9 конфигураций оборудования, описанных в таблице 2. Рисунок 9 показывает среднее значение картин, созданных для каждого оборудования, а также средние значения плотности цвета, вычисленные с использованием (13). Хотя усреднение 10 раундов, кажется, уменьшает присутствие выбросов, мы все же можем наблюдать, как расстояние между объективным цветом (представленным кружком) и результирующим цветовым распределением (квадратом) обычно увеличивается по мере того, как команда становится более неоднородной.Более того, если мы наблюдаем цветовой градиент вдоль вертикальной оси картины, смешение цветов становится более неравномерным по мере увеличения неоднородности команды. Это явление становится совершенно очевидным, если мы сравним верхний ряд рисунков 9A – C с нижним рядом (G – I).
Рисунок 9 . Усредненные картины по 10 пробам. Среднее значение входных плотностей (круг), центра масс результирующих цветов согласно φ из (13) (квадрат) и ковариационного эллипса (пунктирные линии).Неоднородность покрасочного оборудования роботов оказывает значительное влияние на характер картин.
Количественно это расстояние между объективным и полученным распределением плотности цвета суммировано на Рисунке 10, который показывает среднее расстояние между входной плотностью и результирующими цветами. Аналогично анализу на Рисунке 7, который содержал данные для одного прогона в Роботариуме для пяти из девяти установок, средние расстояния, показанные на Рисунке 10, показывают, что результирующие цветовые распределения имеют тенденцию отклоняться от объективных по мере того, как команда становится больше неоднородный.
Рисунок 10 . Ящичковые диаграммы среднего расстояния между вводом средней плотности и результирующим центром масс, вычисленным в (15) для 9 различных конфигураций оборудования. Результаты представлены для 10 различных экспериментов, проведенных для каждого оборудования. Как видно, среднее расстояние увеличивается с увеличением неоднородности окрасочного оборудования роботов.
Результаты представлены для 10 различных экспериментов, проведенных для каждого оборудования. Как видно, среднее расстояние увеличивается с увеличением неоднородности окрасочного оборудования роботов.
Таким образом, результаты этого статистического анализа подтверждают наблюдения, проведенные при анализе картин, полученных в Роботариуме.Таким образом, характеристика результата рисования с точки зрения ресурсов команды кажется последовательной на протяжении разных прогонов и независимой от начальных пространственных условий команды.
6. Выводы
В этой статье представлена роботизированная система рисования роя, основанная на мобильных роботах, оставляющих следы краски при движении, где пользователь-человек может повлиять на результат рисования, указав желаемую плотность цвета на холсте. Взаимодействие между человеком-пользователем и рисунком обеспечивается посредством парадигмы неоднородного покрытия, при которой роботы распределяются по домену в соответствии с желаемыми цветовыми результатами и своими возможностями рисования, которые могут быть ограничены. Предлагается стратегия смешения цветов, позволяющая каждому роботу адаптировать цвет своего следа в соответствии с цветовыми целями, указанными пользователем, в пределах возможностей рисования каждого робота. Предлагаемая система рисования с несколькими роботами оценивается экспериментально, чтобы оценить, как предложенная стратегия смешения цветов и цветовое оборудование роботов влияют на получаемый окрашенный холст. Для набора функций целевой плотности проводится серия экспериментов, в которых возможности команды по окраске варьируются с целью изучения того, как изменение оборудования для окраски у роботов в команде влияет на результат окраски.Анализ полученных рисунков показывает, что, хотя более высокая неоднородность приводит к большим отклонениям в отношении функций плотности, определяемых пользователем – по сравнению с однородными, т. Е. Полностью оборудованными командами, – рисунки, созданные с помощью стратегии управления в этой статье, все же достигают распределение цвета по холсту, которое очень похоже на ввод, даже когда у команды ограничены ресурсы.
Предлагается стратегия смешения цветов, позволяющая каждому роботу адаптировать цвет своего следа в соответствии с цветовыми целями, указанными пользователем, в пределах возможностей рисования каждого робота. Предлагаемая система рисования с несколькими роботами оценивается экспериментально, чтобы оценить, как предложенная стратегия смешения цветов и цветовое оборудование роботов влияют на получаемый окрашенный холст. Для набора функций целевой плотности проводится серия экспериментов, в которых возможности команды по окраске варьируются с целью изучения того, как изменение оборудования для окраски у роботов в команде влияет на результат окраски.Анализ полученных рисунков показывает, что, хотя более высокая неоднородность приводит к большим отклонениям в отношении функций плотности, определяемых пользователем – по сравнению с однородными, т. Е. Полностью оборудованными командами, – рисунки, созданные с помощью стратегии управления в этой статье, все же достигают распределение цвета по холсту, которое очень похоже на ввод, даже когда у команды ограничены ресурсы.
Заявление о доступности данных
Все наборы данных, созданные для этого исследования, включены в статью / дополнительные материалы.
Авторские взносы
MS, GN, SM и ME внесли свой вклад в концепцию и дизайн исследования. MS, GN и SM запрограммировали управление роботизированной системой и выполнили план экспериментов. MS провела обработку данных и анализ эксперимента. MS, GN и SM написали основные разделы рукописи. ME – главный исследователь, связанный с этим проектом. Все авторы участвовали в доработке рукописи, прочитали и одобрили представленную версию.
Финансирование
Эта работа была поддержана ARL DCIST CRA W911NF-17-2-0181 и La Caixa Banking Foundation в рамках гранта LCF / BQ / AA16 / 11580039.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www. frontiersin.org/articles/10.3389/frobt.2020.580415/full#supplementary-material
frontiersin.org/articles/10.3389/frobt.2020.580415/full#supplementary-material
Список литературы
Акерман, Э. (2014). Летающие боты оживают в Cirque du Soleil.IEEE Spectrum.
Альбин А., Вайнберг Г. и Эгерштедт М. (2012). «Музыкальные абстракции в распределенных системах с несколькими роботами», , Международная конференция IEEE / RSJ 2012 по интеллектуальным роботам и системам, (Виламура), 451–458. DOI: 10.1109 / IROS.2012.6385688
CrossRef Полный текст | Google Scholar
Алонсо-Мора, Дж., Сигварт, Р., и Бердсли, П. (2014). «Взаимодействие роя человека и робота для развлечения: от отображения анимации до управления на основе жестов», в материалах Proceedings of the 2014 ACM / IEEE International Conference on Human-robot Interaction, HRI ’14 (New York, NY: ACM), 98.DOI: 10.1145 / 2559636.2559645
CrossRef Полный текст | Google Scholar
Андроутсос, Д., Платаниотисс, К. Н., и Венетсанопулос, А. Н. (1998). «Дистанционные меры для поиска цветных изображений», Международная конференция по обработке изображений Proceedings 1998. ICIP98 (Каталожный номер 98CB36269), Vol. 2 (Чикаго, Иллинойс), 770–774. DOI: 10.1109 / ICIP.1998.723652
«Дистанционные меры для поиска цветных изображений», Международная конференция по обработке изображений Proceedings 1998. ICIP98 (Каталожный номер 98CB36269), Vol. 2 (Чикаго, Иллинойс), 770–774. DOI: 10.1109 / ICIP.1998.723652
CrossRef Полный текст | Google Scholar
Aupetit, S., Bordeau, V., Monmarche, N., Slimane, M.и Вентурини Г. (2003). «Интерактивная эволюция картин с муравьями», The Congress on Evolutionary Computing, 2003. CEC ’03, Vol. 2 , 1376–1383 (Канберра, ACT). DOI: 10.1109 / CEC.2003.1299831
CrossRef Полный текст | Google Scholar
Бернс Р. (2000). Принципы цветовой технологии Биллмейера и Зальцмана, 3-е изд. . Нью-Йорк, штат Нью-Йорк: Wiley.
Google Scholar
Би Т., Фанкхаузер П., Белликосо Д. и Хаттер М. (2018).«Танцевальная генерация в реальном времени под музыку для робота на ногах», Международная конференция IEEE / RSJ по интеллектуальным роботам и системам (IROS), (Мадрид), 2018 г. , 1038–1044. DOI: 10.1109 / IROS.2018.8593983
, 1038–1044. DOI: 10.1109 / IROS.2018.8593983
CrossRef Полный текст | Google Scholar
Булло, Ф., Кортес, Дж., И Мартинес, С. (2009). Распределенное управление роботизированными сетями: математический подход к алгоритмам координации движения. Прикладная математика Серия . Принстон, Нью-Джерси: Издательство Принстонского университета.DOI: 10.1515 / 9781400831470
CrossRef Полный текст | Google Scholar
Кортес, Дж., Мартинес, С., Каратас, Т., и Булло, Ф. (2004). Контроль покрытия для мобильных сетей зондирования. IEEE Trans. Робот. Автомат . 20, 243–255. DOI: 10.1109 / TRA.2004.824698
CrossRef Полный текст | Google Scholar
Дин М., Д’Андреа Р. и Донован М. (2008). Роботизированное кресло . Ванкувер, Британская Колумбия: Галерея современного искусства.
Диас-Меркадо, Y., Ли, С. Г., и Эгерштедт, М. (2015). «Распределенное динамическое покрытие плотности для взаимодействий человека и стаи», American Control Conference (ACC) (Чикаго, Иллинойс), 2015 , 353–358. DOI: 10.1109 / ACC.2015.7170761
DOI: 10.1109 / ACC.2015.7170761
CrossRef Полный текст | Google Scholar
Дитц, Г., Э, Дж. Л., Вашингтон, П., Ким, Л. Х. и Фоллмер, С. (2017). «Человеческое восприятие движения роя роботов», в Proceedings of the 2017 CHI Conference Extended Abstracts on Human Factors in Computing Systems (Denver, CO), 2520–2527.DOI: 10.1145 / 3027063.3053220
CrossRef Полный текст | Google Scholar
Du, Q., Faber, V., and Gunzburger, M. (1999). Центроидальные мозаики вороного: приложения и алгоритмы. SIAM Ред. . 41, 637–676. DOI: 10.1137 / S0036144599352836
CrossRef Полный текст | Google Scholar
Дунстан, Б. Дж., Сильвера-Тавил, Д., Кох, Дж. Т. К. В., и Велонаки, М. (2016). «Культурная робототехника: роботы как участники и творцы культуры», в Cultural Robotics , ред.Т. Кох, Б. Дж. Данстан, Д. Сильвера-Тавил и М. Велонаки (Cham: Springer International Publishing), 3–13. DOI: 10.1007 / 978-3-319-42945-8_1
CrossRef Полный текст | Google Scholar
Гринфилд, Г. (2005). «Эволюционные методы для рисунков муравьиных колоний», в Приложениях эволюционных вычислений , ред. Ф. Ротлауф, Дж. Бранке, С. Каньони, Д. В. Корн, Р. Дрекслер, Ю. Джин, П. Мачадо, Э. Маркиори, Дж. Ромеро, Г. Д. Смит и Г. Скиллеро (Берлин; Гейдельберг: Springer Berlin Heidelberg), 478–487.DOI: 10.1007 / 978-3-540-32003-6_48
(2005). «Эволюционные методы для рисунков муравьиных колоний», в Приложениях эволюционных вычислений , ред. Ф. Ротлауф, Дж. Бранке, С. Каньони, Д. В. Корн, Р. Дрекслер, Ю. Джин, П. Мачадо, Э. Маркиори, Дж. Ромеро, Г. Д. Смит и Г. Скиллеро (Берлин; Гейдельберг: Springer Berlin Heidelberg), 478–487.DOI: 10.1007 / 978-3-540-32003-6_48
CrossRef Полный текст | Google Scholar
Хоффман, Г., Вайнберг, Г. (2010). «Джазовая импровизация человека и робота на основе жестов», Международная конференция IEEE по робототехнике и автоматизации, 2010 г., (Анкоридж, AK), 582–587. DOI: 10.1109 / ROBOT.2010.5509182
CrossRef Полный текст | Google Scholar
Jochum, E., and Goldberg, K. (2016). Культивирование сверхъестественного: Телегард и другие странности .Сингапур: Springer Singapore. DOI: 10.1007 / 978-981-10-0321-9_8
CrossRef Полный текст | Google Scholar
Кудо, С., Огавара, К., Ручанурукс, М., Икеучи, К. (2009). Малярный робот с многопалыми руками и стереозрением..jpg) Робот. Auton. Syst . 57, 279–288. DOI: 10.1016 / j.robot.2008.10.007
Робот. Auton. Syst . 57, 279–288. DOI: 10.1016 / j.robot.2008.10.007
CrossRef Полный текст | Google Scholar
ЛаВирс, А., Тиг, Л., и Эгерштедт, М. (2014). Роботизированное движение на основе стиля в современном танцевальном представлении .Чам: Издательство Springer International. DOI: 10.1007 / 978-3-319-03904-6_9
CrossRef Полный текст | Google Scholar
Левиллен, Ф., Сен-Онге, Д., Зибетти, Э., и Бельтрам, Г. (2018). «Больше, чем просто сумма его частей: оценка когерентности и выразительности роя роботов», на международном симпозиуме IEEE 2018 по интерактивной коммуникации роботов и человека (RO-MAN), (Нанкин), 583–588. DOI: 10.1109 / ROMAN.2018.8525640
CrossRef Полный текст | Google Scholar
Линдемайер, Т., Пирк, С., Деуссен, О. (2013). Стилизация изображения малярной машиной с использованием смысловых подсказок. Comput. График . 37, 293–301. DOI: 10.1016 / j.cag.2013.01.005
CrossRef Полный текст | Google Scholar
Ллойд, С. (1982). Квантование методом наименьших квадратов в PCM. IEEE Trans. Сообщить. Теория 28, 129–137. DOI: 10.1109 / TIT.1982.1056489
(1982). Квантование методом наименьших квадратов в PCM. IEEE Trans. Сообщить. Теория 28, 129–137. DOI: 10.1109 / TIT.1982.1056489
CrossRef Полный текст | Google Scholar
Моура, Л., и Рамос, В. (2002). Картины роя – нечеловеческое искусство.Архитопия: книга, искусство, архитектура и наука . Лион; Виллербан: Institut d’Art Contemporain.
Google Scholar
Накадзава А., Накаока С., Икеучи К. и Ёкои К. (2002). «Имитация танцевальных движений человека посредством анализа структуры движений», в Международная конференция IEEE / RSJ по интеллектуальным роботам и системам, Vol. 3 (Лозанна), 2539–2544. DOI: 10.1109 / IRDS.2002.1041652
CrossRef Полный текст | Google Scholar
Олфати-Сабер, Р.(2002). «Почти тождественные диффеоморфизмы и экспоненциальное ϵ-трекинг и ϵ-стабилизация неголономных Se (2) транспортных средств первого порядка», in Proceedings of the American Control Conference 2002, Vol. 6 (Анкоридж, AK), 4690–4695.![]()
Google Scholar
Сантос, М., Диас-Меркадо, Ю., и Эгерштедт, М. (2018). Контроль покрытия для групп, состоящих из нескольких роботов, с возможностью неоднородного обнаружения. Робот IEEE. Автомат. Lett . 3, 919–925. DOI: 10.1109 / LRA.2018.2792698
CrossRef Полный текст | Google Scholar
Сантос, М., и Эгерштедт, М. (2018). «Управление охватом для групп, состоящих из нескольких роботов, с возможностью разнородного зондирования с использованием ограниченного обмена данными», в Международная конференция IEEE / RSJ 2018 по интеллектуальным роботам и системам (IROS), (Мадрид), 5313–5319, 2018. DOI: 10.1109 / IROS.2018.8594056
CrossRef Полный текст | Google Scholar
Сантос, М., Эгерштедт, М. (2020). От движений к эмоциям: можно ли выразить основные эмоции в рое роботов? Внутр. J. Soc. Робот .DOI: 10.1007 / s12369-020-00665-6
CrossRef Полный текст | Google Scholar
Скалера, Л., Сериани, С. , Гаспаретто, А., и Галлина, П. (2019). Акварельная роботизированная живопись: новая автоматическая система художественного рендеринга. J. Intell. Робот. Syst . 95, 871–886. DOI: 10.1007 / s10846-018-0937-y
, Гаспаретто, А., и Галлина, П. (2019). Акварельная роботизированная живопись: новая автоматическая система художественного рендеринга. J. Intell. Робот. Syst . 95, 871–886. DOI: 10.1007 / s10846-018-0937-y
CrossRef Полный текст | Google Scholar
Шеллиг, А.П., Сигель, Х., Аугульяро, Ф., и Д’Андреа, Р. (2014). Так вы думаете, что умеете танцевать? Ритмичные летные характеристики с квадрокоптерами , Cham: Springer International Publishing.DOI: 10.1007 / 978-3-319-03904-6_4
CrossRef Полный текст | Google Scholar
Шуберт А. (2017). Анализ движений рисования человеческих действий на основе оптимального управления (кандидатская диссертация). Университет Гейдельберга, Гейдельберг, Германия.
Сен-Онге, Д., Левиллен, Ф., Элизабетта, З., и Бельтрам, Г. (2019). Коллективное самовыражение: как рои роботов передают информацию с помощью группового движения. Паладин Дж. Поведение. Робот . 10, 418–435. DOI: 10.1515 / pjbr-2019-0033
CrossRef Полный текст | Google Scholar
Трессет, П. , и Леймари, Ф. Ф. (2013). Портретный рисунок робота Пола. Comput. График . 37, 348–363. DOI: 10.1016 / j.cag.2013.01.012
, и Леймари, Ф. Ф. (2013). Портретный рисунок робота Пола. Comput. График . 37, 348–363. DOI: 10.1016 / j.cag.2013.01.012
CrossRef Полный текст | Google Scholar
Тву П., Мостофи Ю. и Эгерштедт М. (2014). «Мера неоднородности в многоагентных системах», , 2014 American Control Conference (Портленд, Орегон), 3972–3977. DOI: 10.1109 / ACC.2014.6858632
CrossRef Полный текст | Google Scholar
Урбано, П. (2005). «Игра на игровой площадке с феромонами: опыт рисования роя», в Applications of Evolutionary Computing , eds F.Ротлауф, Дж. Бранке, С. Каньони, Д. У. Корн, Р. Дрекслер, Ю. Джин, П. Мачадо, Э. Маркиори, Дж. Ромеро, Г. Д. Смит и Г. Скиллеро (Берлин; Гейдельберг: Springer Berlin Heidelberg), 527–532. DOI: 10.1007 / 978-3-540-32003-6_53
CrossRef Полный текст | Google Scholar
Vlachos, E., Jochum, E., and Demers, L. (2018). «Тепло: тест самооценки экзоскелета гармонии», 2018 27-й Международный симпозиум IEEE по интерактивному общению роботов и человека (RO-MAN), (Нанкин), 577–582. DOI: 10.1109 / ROMAN.2018.8525775
DOI: 10.1109 / ROMAN.2018.8525775
CrossRef Полный текст | Google Scholar
Wilson, S., Glotfelter, P., Wang, L., Mayya, S., Notomista, G., Mote, M., et al. (2020). Роботариум: глобальные возможности, проблемы и уроки, извлеченные из удаленного доступа, распределенного управления мультироботными системами. Система управления IEEE. Mag . 40, 26–44. DOI: 10.1109 / MCS.2019.2949973
CrossRef Полный текст | Google Scholar
покрасочных роботов | Роботизированная покраска и дозирование
Представление детали
Представление деталей роботам широко варьируется от приложения к приложению.Для промышленных операций по окраске детали обычно хранятся в бункере для партии, бункере или на плоском конвейере. Затем детали должны быть обнаружены и помещены на стеллаж или подвесной конвейер для представления на оборудовании для нанесения покрытий.
Наши продукты для машинного зрения MotoSight ™ могут помочь найти детали, чтобы робот мог их точно и последовательно подбирать.
Тестирование характеристик краски
Производители, стремящиеся к достижению более реалистичных результатов окраски или покрытия, могут выбрать оценку характеристик окраски на испытательных панелях или скоростных форм с помощью роботизированной автоматизации.Использование роботов обеспечивает большую гибкость и стабильность по сравнению с 2-осевыми распылительными машинами, а также упрощает работу.
Многоступенчатый процесс нанесения покрытия
Фактическая линия окраски часто представляет собой многоступенчатый процесс. Наши роботы и системы поддерживают следующие процессы нанесения покрытий:
Однокомпонентный
Двухкомпонентный
Водная база
Электростатический спрей
Порошковое покрытие
Воск-спрей
Грунтовка и шумоглушитель
Клеи и герметики
Применение краски или материала широко варьируется. Ниже приведен список типов аппликаторов, поддерживаемых нашей продукцией:
Ниже приведен список типов аппликаторов, поддерживаемых нашей продукцией:
Стандартные безвоздушные распылители и безвоздушные распылители
Большой объем низкого давления (HVLP)
Электростатический
Пистолеты Bell (роторные форсунки)
Аппликаторы порошка
Завихритель
Отверждение
После нанесения покрытие необходимо отвердить.Обычно это делается с течением времени путем нагревания или использования ультрафиолетовых ламп. Фактический процесс отверждения чаще всего осуществляется с деталями на одной и той же стойке или конвейере, сразу после процесса нанесения покрытия.
Обработка деталей
После отверждения покрытия детали можно снимать со стеллажа или конвейера. У нас есть широкий ассортимент роботов для погрузочно-разгрузочных работ, которые могут перемещать детали для следующего процесса.
Визуальный осмотр
Доставка неисправных или бракованных продуктов может иметь разрушительные последствия для бизнеса. Машинное зрение имеет долгую историю контроля деталей, обеспечивая стабильное и предсказуемое качество. Будь то измерение детали, обнаружение наличия функции или проверка ошибок, наши продукты MotoSight имеют все необходимые инструменты проверки и анализа данных для проверки деталей.
Машинное зрение имеет долгую историю контроля деталей, обеспечивая стабильное и предсказуемое качество. Будь то измерение детали, обнаружение наличия функции или проверка ошибок, наши продукты MotoSight имеют все необходимые инструменты проверки и анализа данных для проверки деталей.
Сказка о роботе-рисовальщике, который не украл ни у кого работу
Появление роботизированной руки не было счастливым событием в компании Professional Finishing в Ричмонде, штат Калифорния, через залив от Сан-Франциско.В отличие от громоздких заводских рук, которые традиционно работали изолированно, этот робот предназначался для работы вместе с людьми, деликатно шлифуя и окрашивая такие вещи, как корпуса динамиков или шкафы для медицинских устройств. Это звучало как первый шаг к полной замене сотрудников компании.
«У нас действительно был один сотрудник, который сказал нам:« Дайте мне знать, когда робот заработает, и я просто уйду », – говорит совладелец Professional Finishing Дон Уайт. «Мы сказали, просто потерпите нас.Смотрите, что происходит. Помогите нам, и все сохранят свои рабочие места ».
«Мы сказали, просто потерпите нас.Смотрите, что происходит. Помогите нам, и все сохранят свои рабочие места ».
Действительно, все сохранили свои рабочие места. Сегодня три из этих машин от Universal Robots выполняют грубую шлифовку и покраску, в то время как люди выполняют более сложные задачи, такие как сборка. Некоторые из этих рабочих даже превратились в техников-роботов. Это называется коллаборативной робототехникой, и она появляется повсюду благодаря передовым машинам, которые чувствуют, когда они контактируют с человеком и останавливаются, а не запускают их через всю комнату.
Как и многие другие компании, Professional Finishing перешла на робототехнику с экономической точки зрения. Спустя всего несколько месяцев после покупки бизнеса в 2013 году Дон Уайт и ее муж Чад узнали, что к 2020 году минимальная заработная плата вырастет с 9 долларов в час до 15 долларов. отделочная компания, которая конкурирует с дешевой рабочей силой за рубежом.
«Для нас это было вопросом выживания», – говорит Дон. «Мы бы закрылись менее чем за два года, если бы не привезли роботов.Все здесь потеряли бы работу ».
«Мы бы закрылись менее чем за два года, если бы не привезли роботов.Все здесь потеряли бы работу ».
Итак, через 10 месяцев после покупки компании белые наняли своего первого робота-маляра, что повысило производительность труда людей в четыре раза. И бонус: работа этих людей стала намного проще. «Оператору пришлось бы много сгибать, приседать, поднимать деталь, скручивать в течение всего дня», – говорит Чад. «Теперь все это делает за них робот. И теперь операторы, которые раньше красили эти детали, теперь фактически управляют роботом.
Что, конечно, потребовало некоторой адаптации со стороны людей. «Робот заставил меня нервничать, я думал, что это приведет к увольнениям», – говорит художник Эрик Магаллон, который сейчас работает оператором робота, следя за тем, чтобы в него было достаточно краски и тому подобное. «Но когда мы начали работать с роботом, это стало нормальным явлением. Мы к этому привыкли ».
У вас больше шансов работать с роботом, чем он заменит вас в ближайшем будущем. Потому что, хотя роботы отлично справляются с повторяющимися задачами, люди по-прежнему превосходят их в деликатных и сложных задачах.«Мы думаем, что больше рабочих мест изменит свою деятельность, чем полностью исчезнет, и поэтому мы увидим больше такого сотрудничества между машинами и людьми», – говорит Майкл Чуи, партнер McKinsey Global Institute и соавтор недавнего отчета по автоматизации. «Когда у вас действительно есть робот рядом с человеком или искусственный интеллект рядом с человеком, и они лучше работают вместе для производства более качественной продукции, чем любой из них, работающий в одиночку».
Потому что, хотя роботы отлично справляются с повторяющимися задачами, люди по-прежнему превосходят их в деликатных и сложных задачах.«Мы думаем, что больше рабочих мест изменит свою деятельность, чем полностью исчезнет, и поэтому мы увидим больше такого сотрудничества между машинами и людьми», – говорит Майкл Чуи, партнер McKinsey Global Institute и соавтор недавнего отчета по автоматизации. «Когда у вас действительно есть робот рядом с человеком или искусственный интеллект рядом с человеком, и они лучше работают вместе для производства более качественной продукции, чем любой из них, работающий в одиночку».
Машины не столько воруют рабочие места в массовом порядке, сколько забирают более частей рабочих мест.Рабочим Professional Finishing больше не нужно приседать и скручиваться, но они должны следить за станками и выполнять более сложные задачи. Настольная работа ничем не отличается: подумайте, сколько времени вы сэкономите и повысите продуктивность, используя простой текстовый редактор вместо пишущей машинки.